2020年 第46卷 第9期
2020, 46(9): 1770-1782.
doi: 10.16383/j.aas.c190671
cstr: 32138.14.j.aas.c190671
摘要:
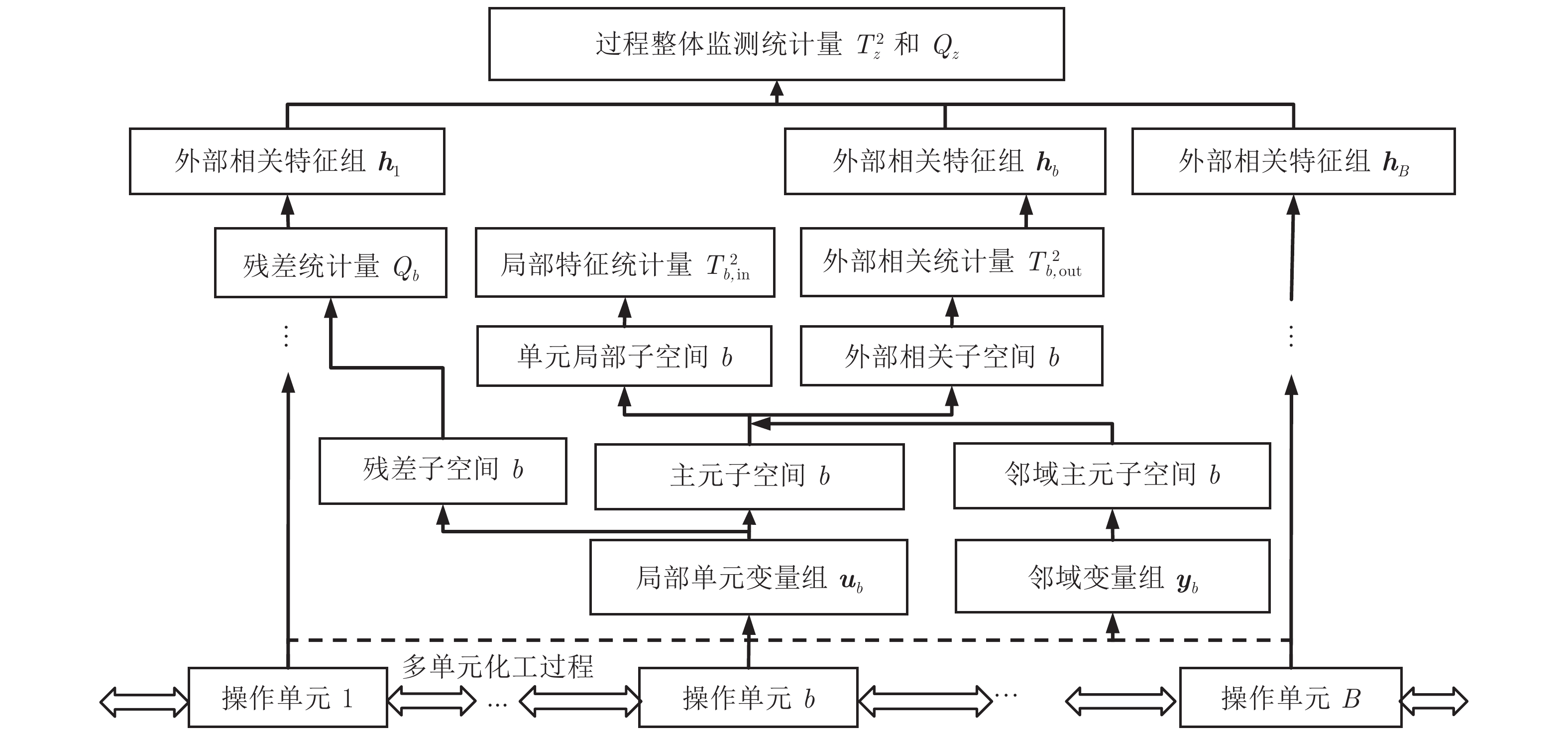
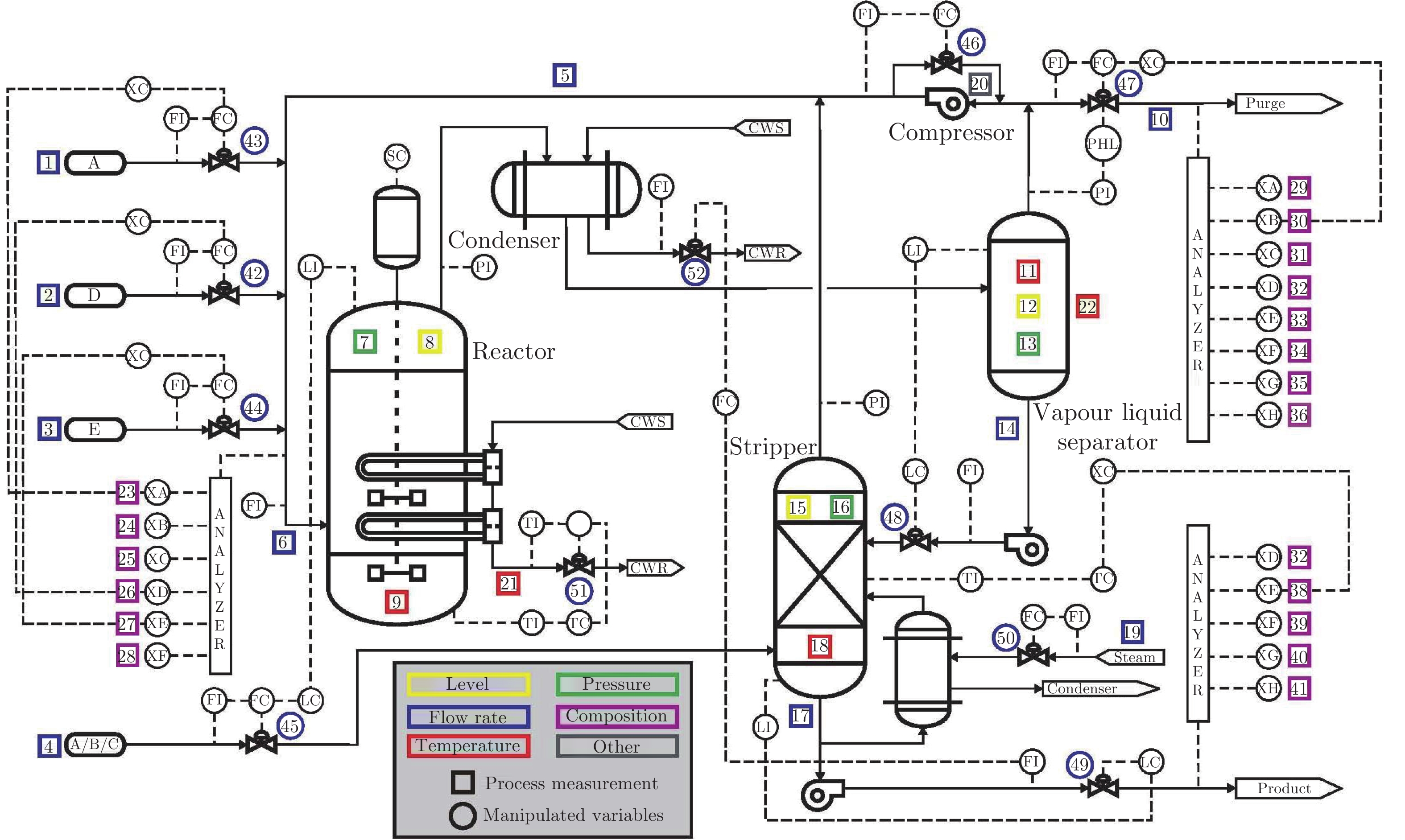
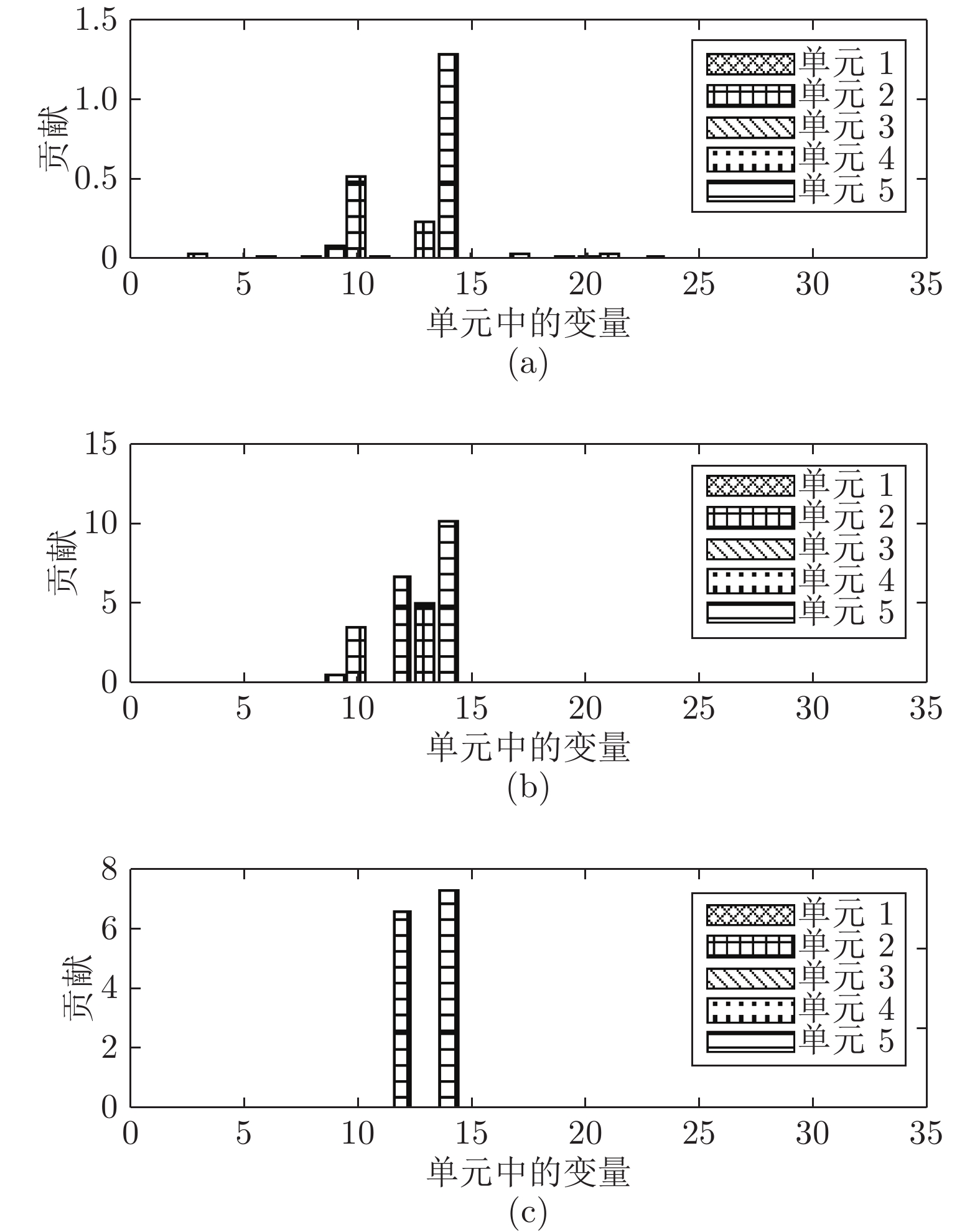
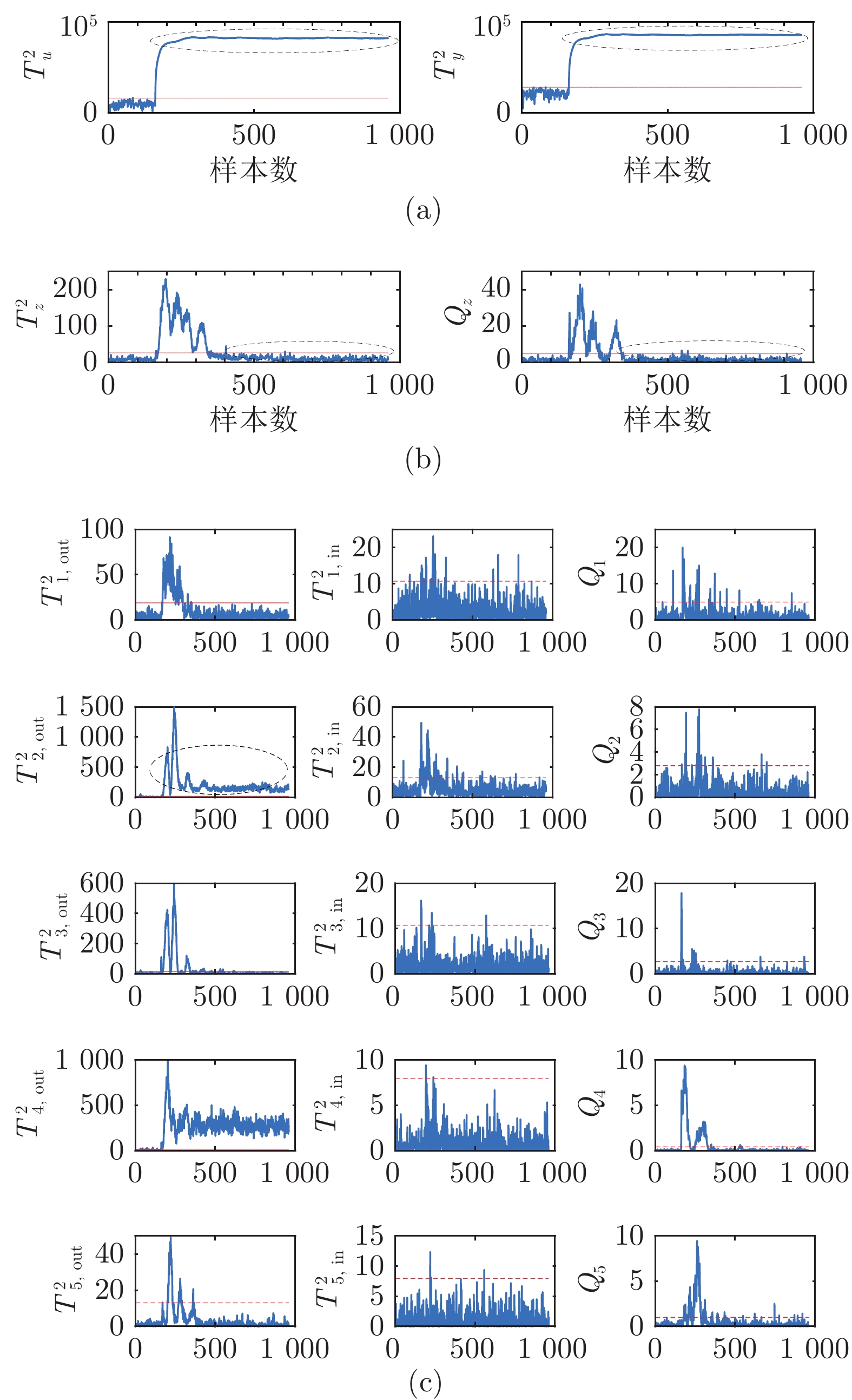
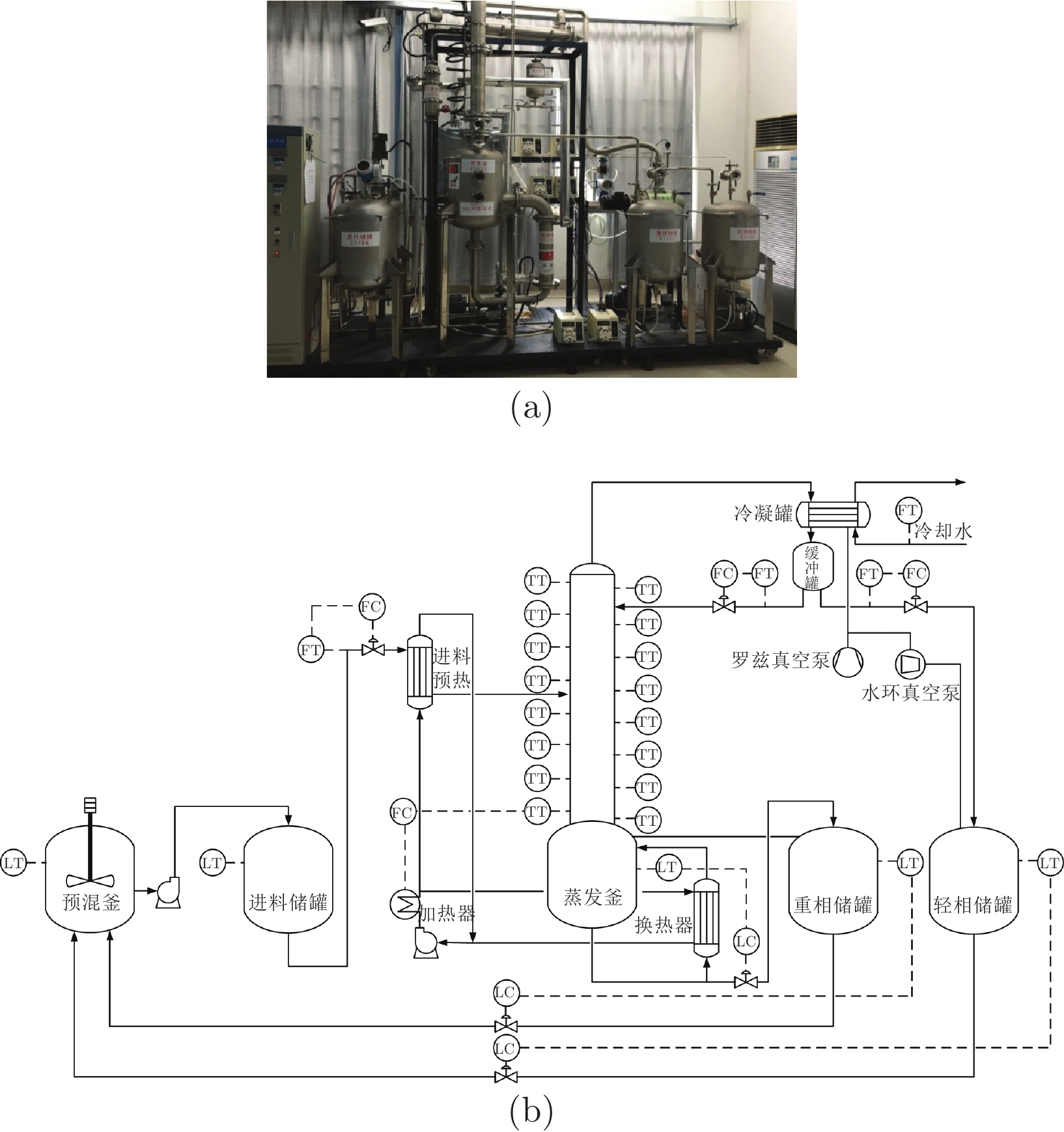
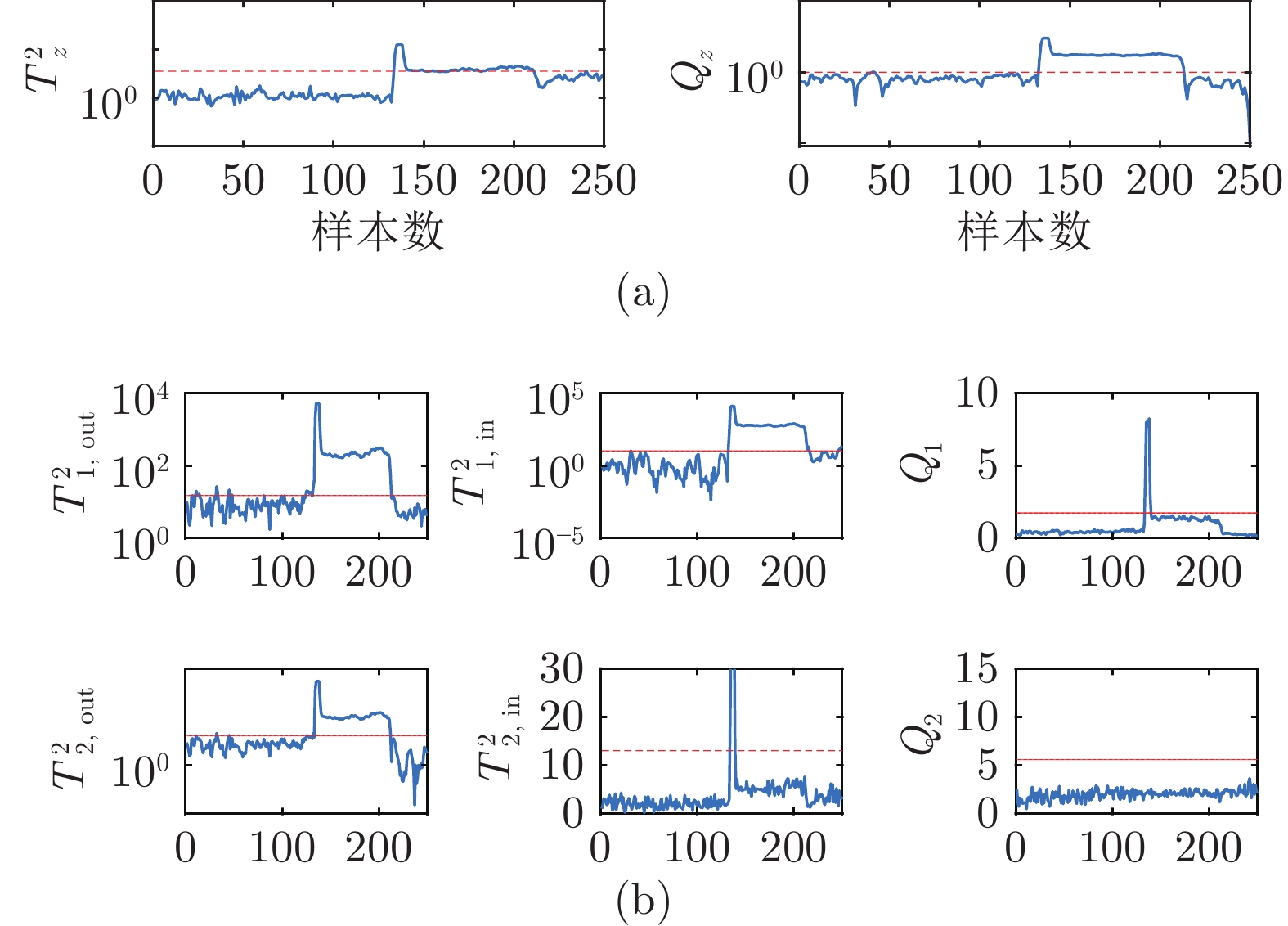
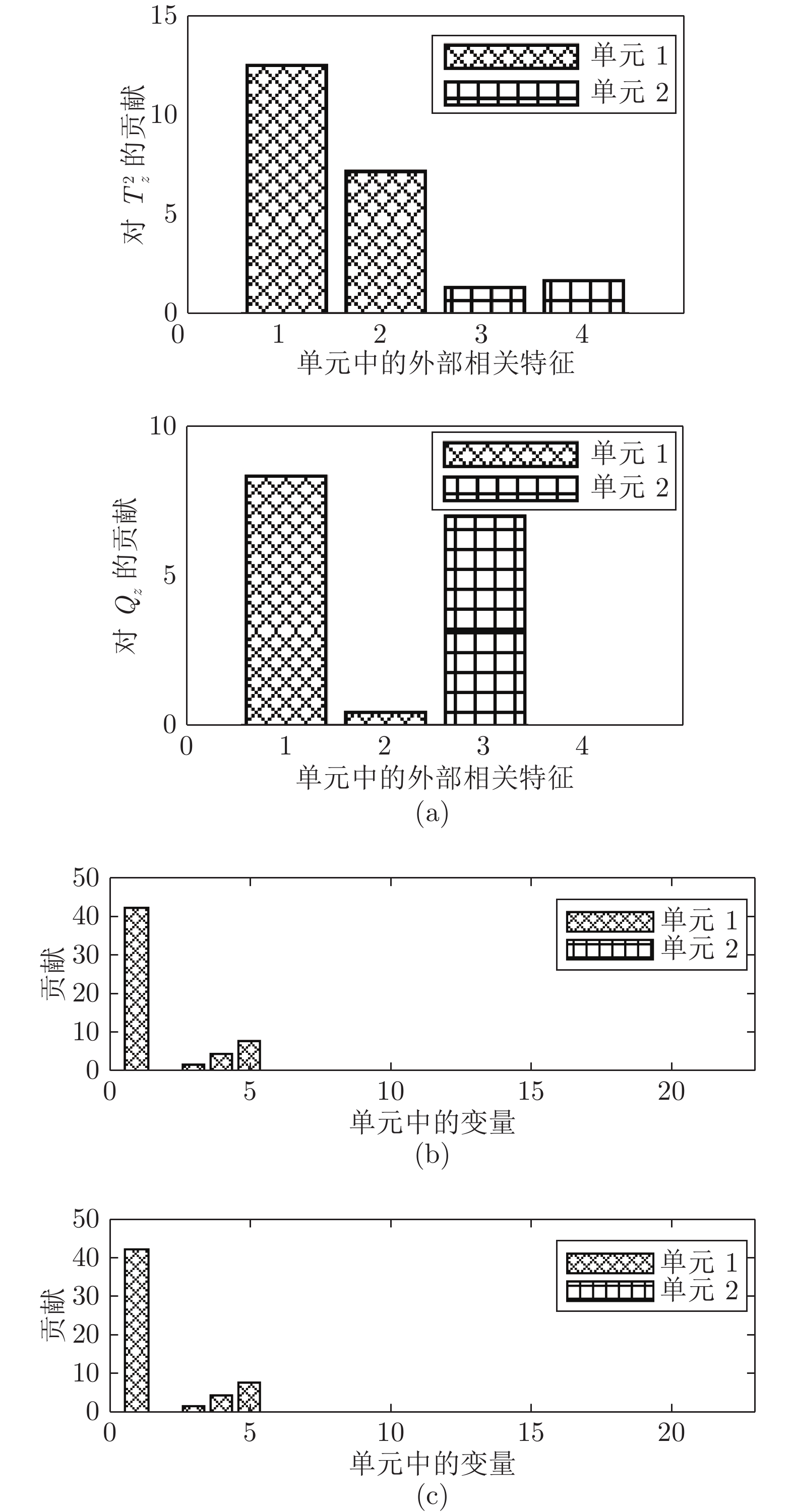
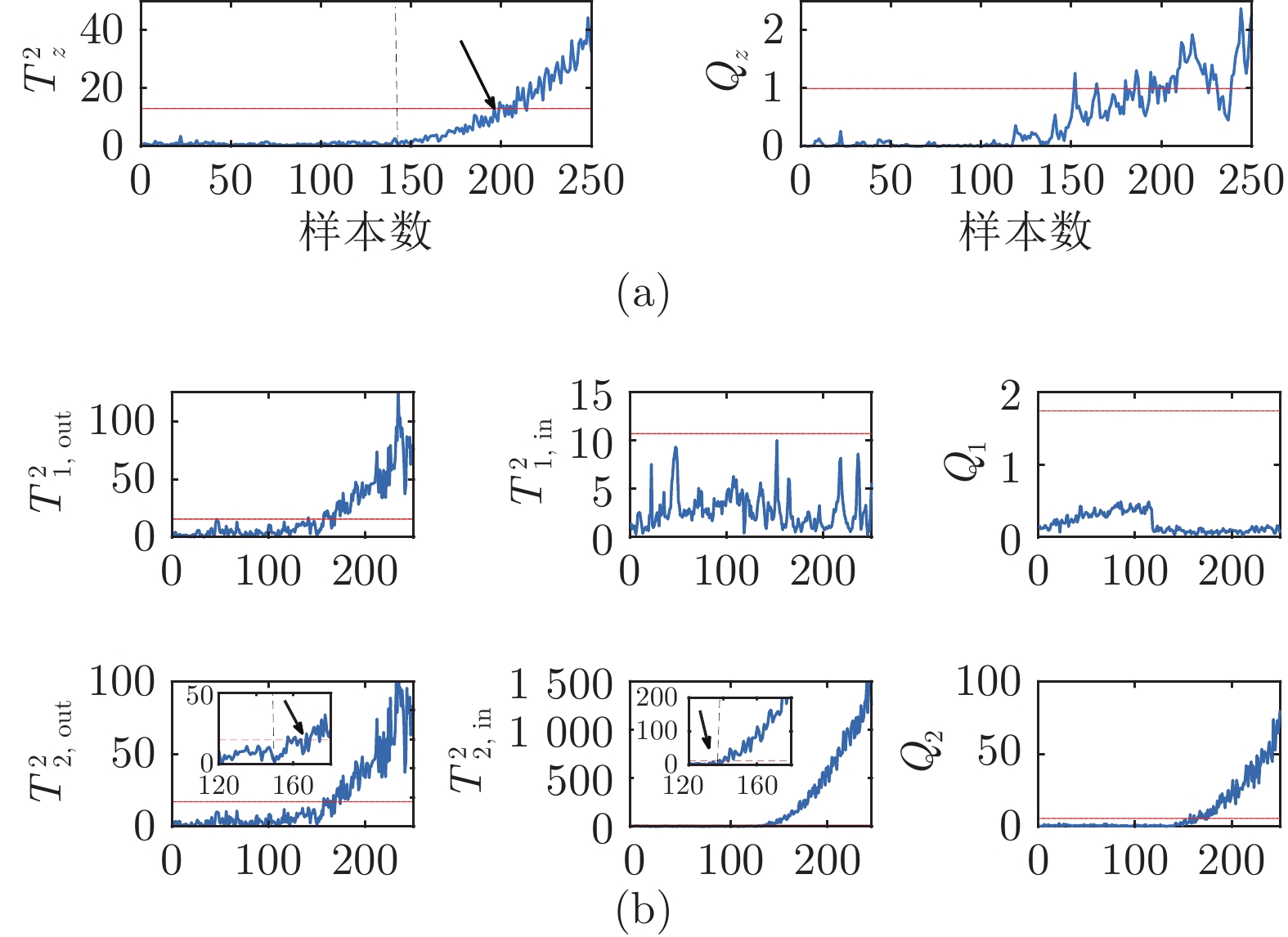
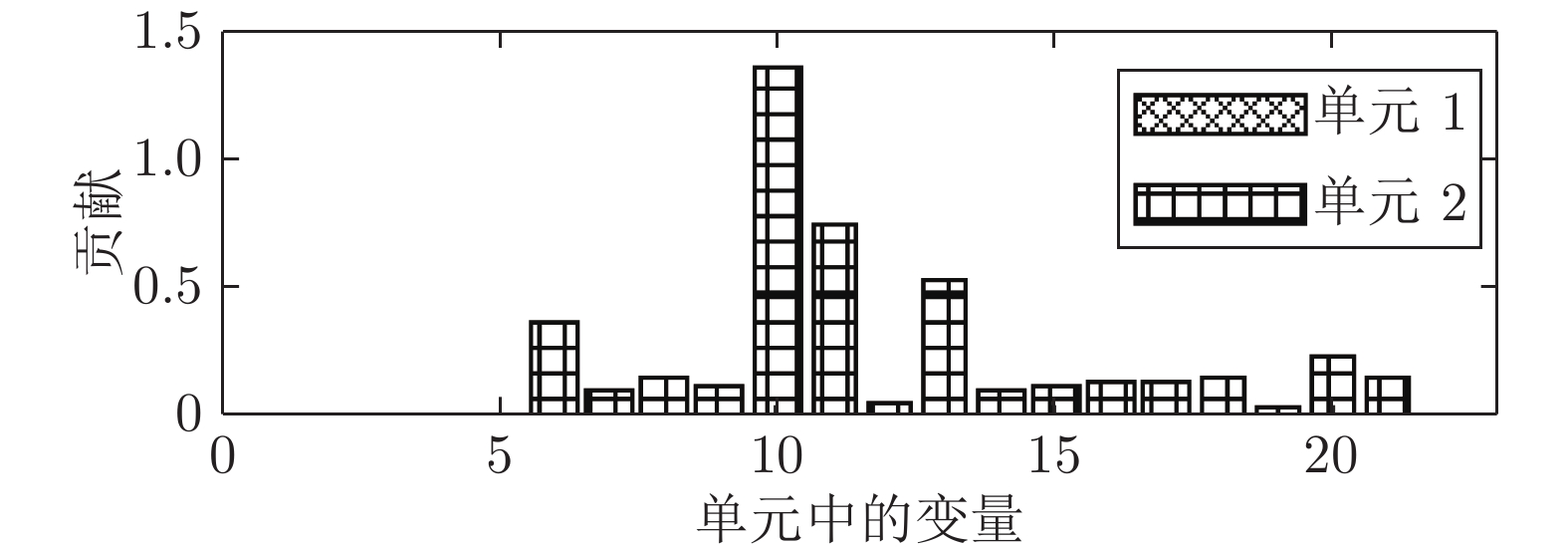
针对一类多单元化工过程的监测问题, 提出基于局部−整体相关特征的分层故障检测与故障定位方法, 通过表征单元内部变量相关性、单元与单元间相关性、局部单元与过程整体相关性, 对过程运行状态进行判断, 以提升过程监测的准确性与可靠性. 首先, 采用典型相关分析, 通过引入邻域单元相关变量提取每个单元的独有特征和外部相关特征; 其次, 对每个单元的独有特征和所有单元的外部相关特征建立统计模型实现分层故障检测; 然后, 建立单元−变量分层贡献图, 对故障单元以及故障变量实现分层定位. 通过在Tennessee Eastman仿真过程和一个实验室级甘油精馏过程中的应用说明所提分层监测方法的有效性.
针对一类多单元化工过程的监测问题, 提出基于局部−整体相关特征的分层故障检测与故障定位方法, 通过表征单元内部变量相关性、单元与单元间相关性、局部单元与过程整体相关性, 对过程运行状态进行判断, 以提升过程监测的准确性与可靠性. 首先, 采用典型相关分析, 通过引入邻域单元相关变量提取每个单元的独有特征和外部相关特征; 其次, 对每个单元的独有特征和所有单元的外部相关特征建立统计模型实现分层故障检测; 然后, 建立单元−变量分层贡献图, 对故障单元以及故障变量实现分层定位. 通过在Tennessee Eastman仿真过程和一个实验室级甘油精馏过程中的应用说明所提分层监测方法的有效性.


2020, 46(9): 1783-1797.
doi: 10.16383/j.aas.c200171
cstr: 32138.14.j.aas.c200171
摘要:
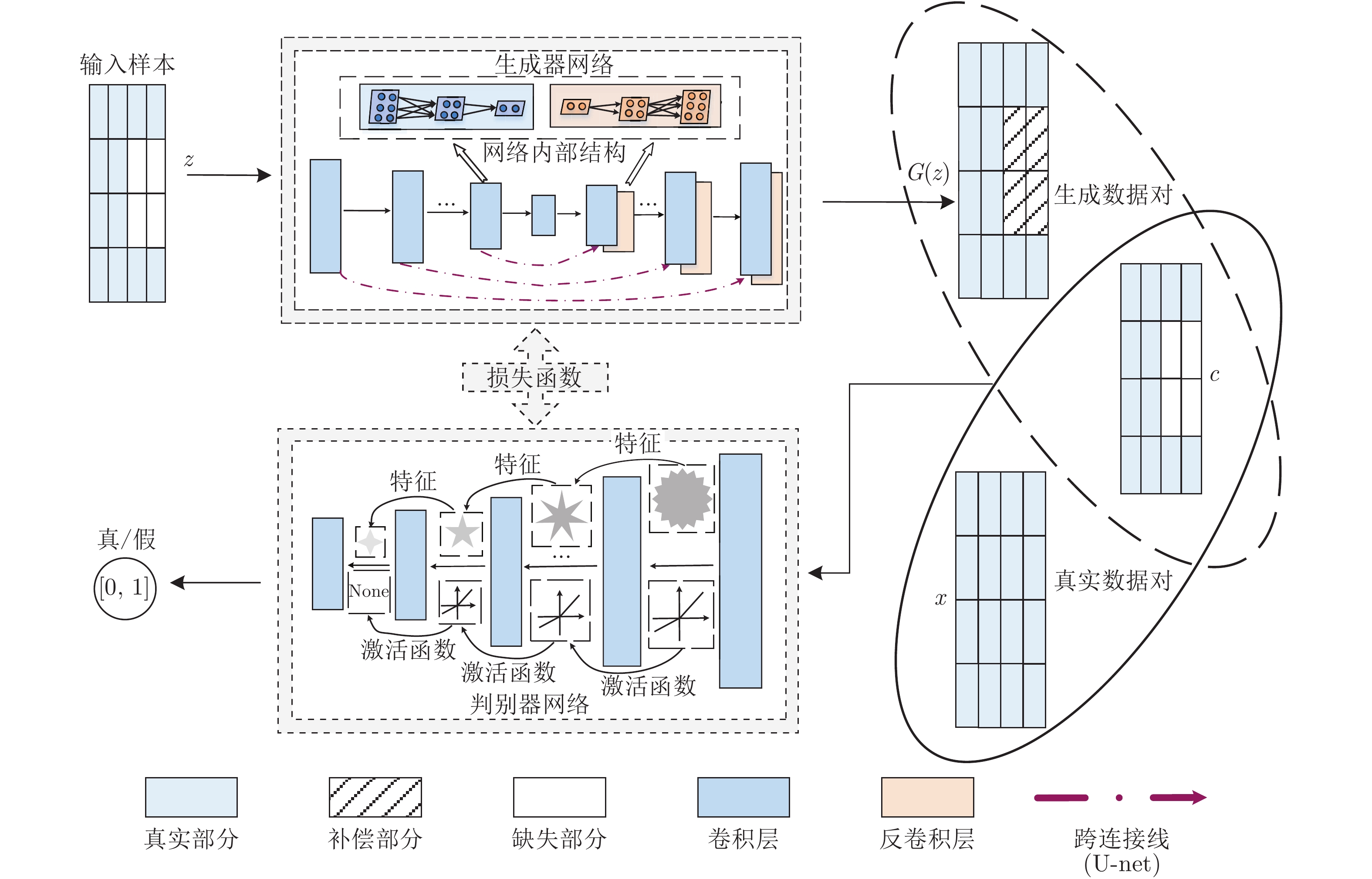
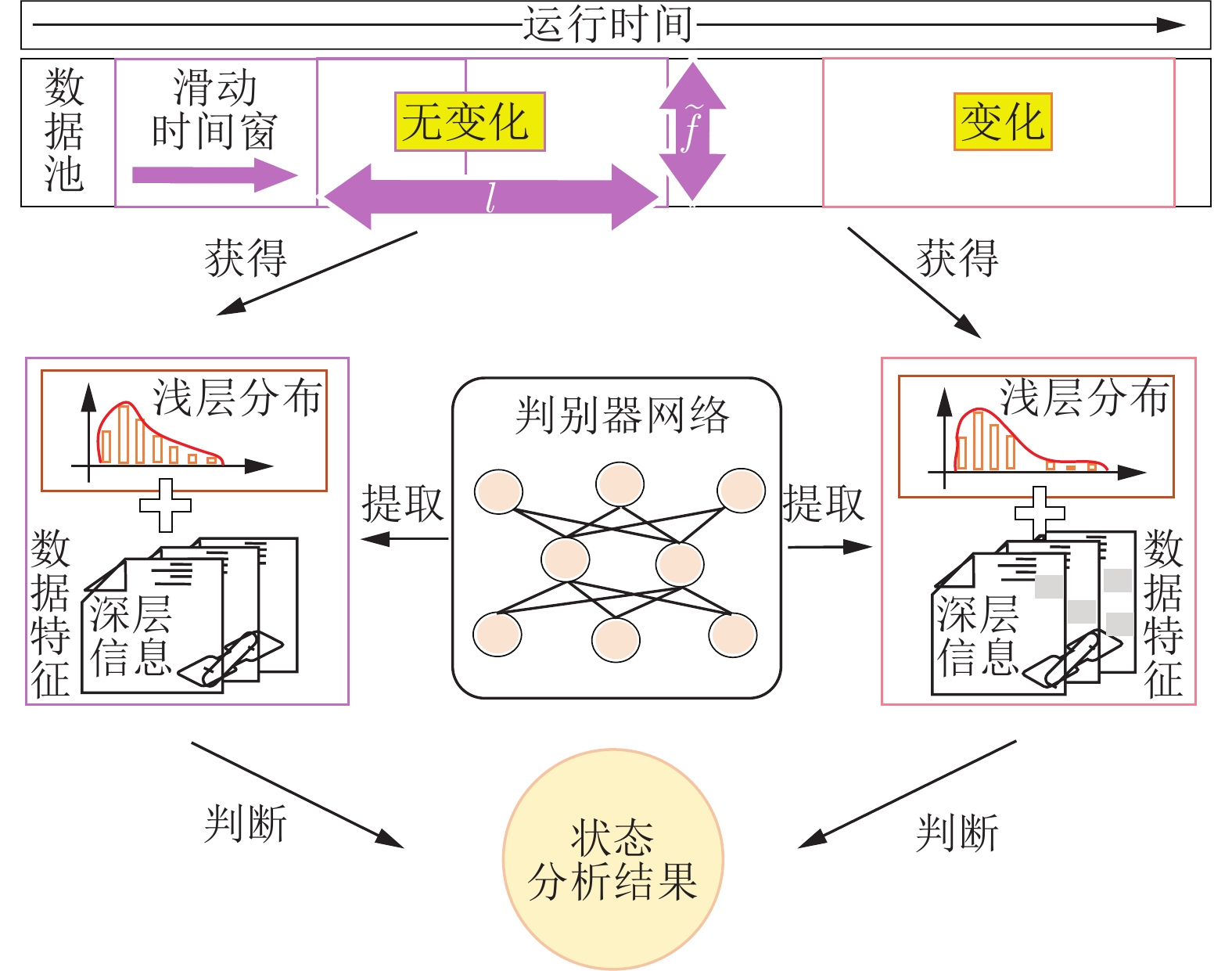
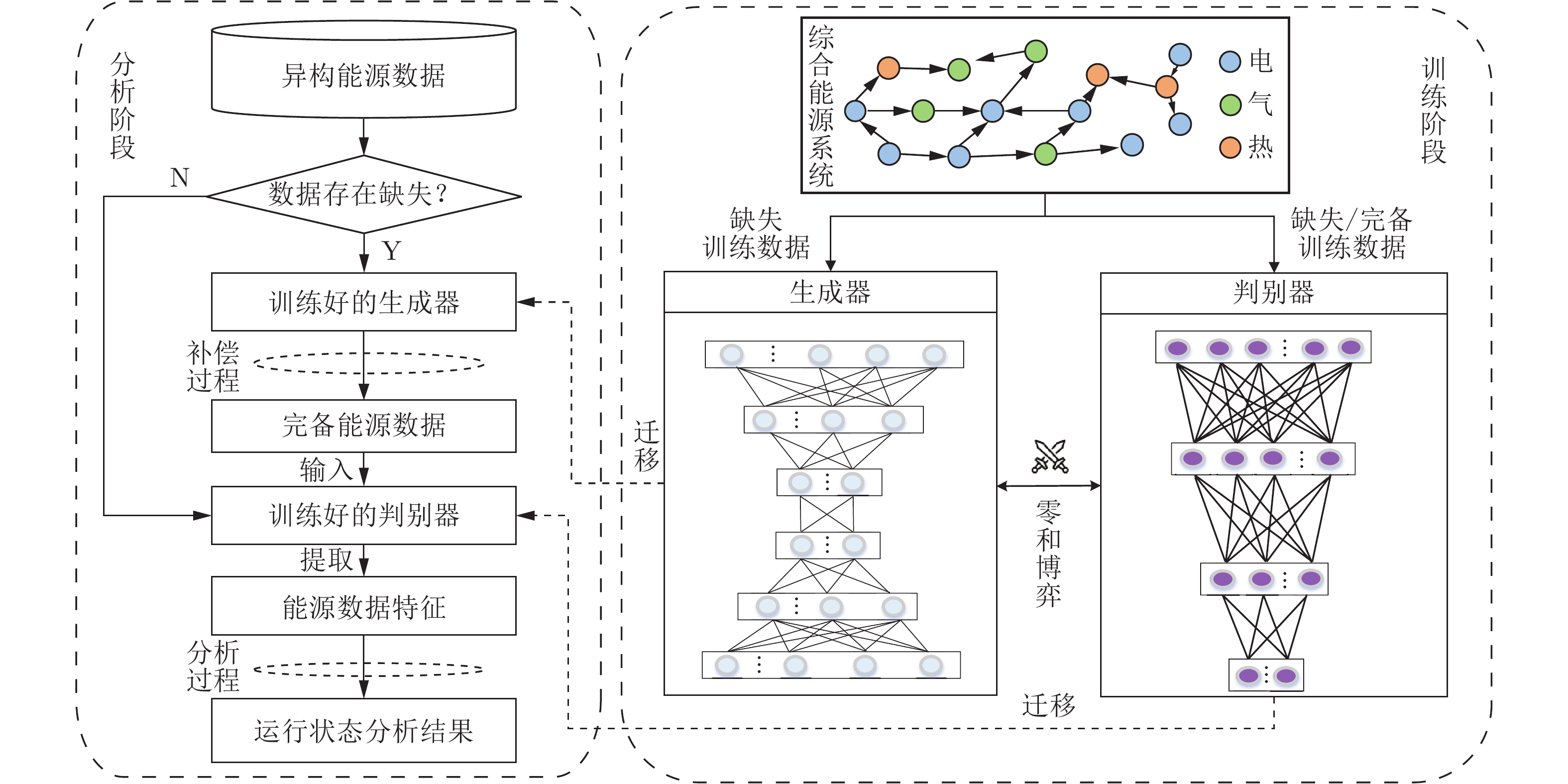
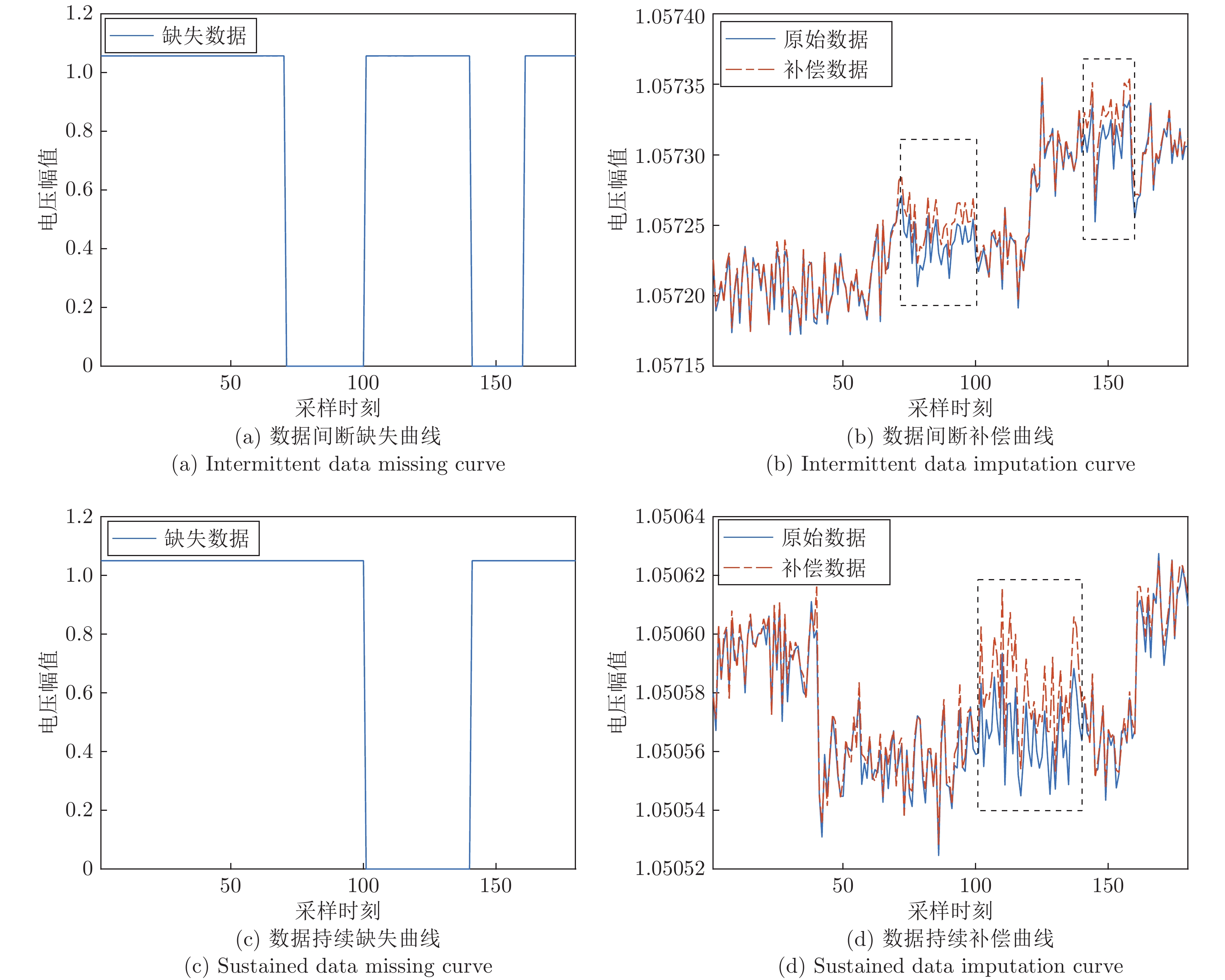
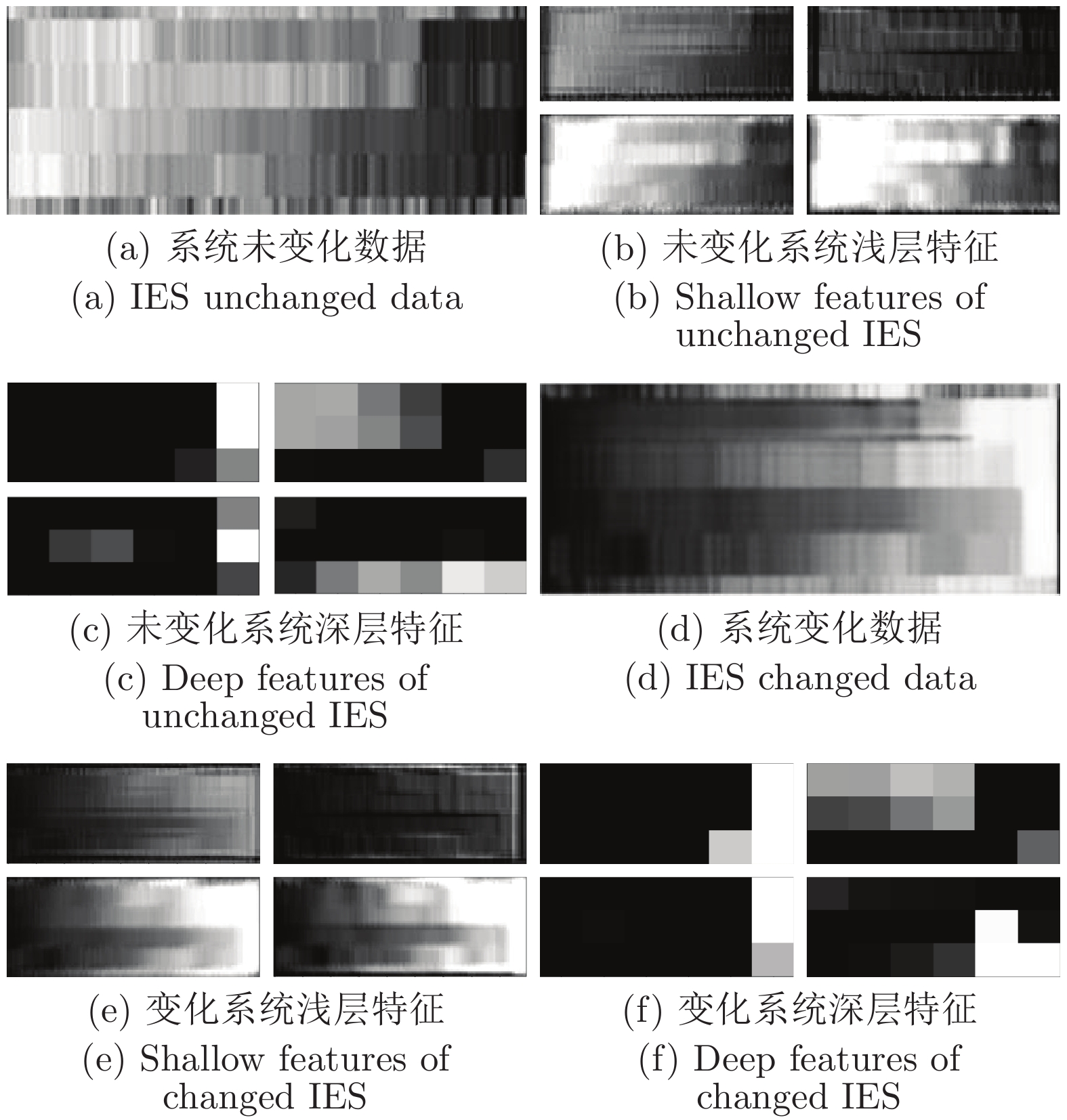
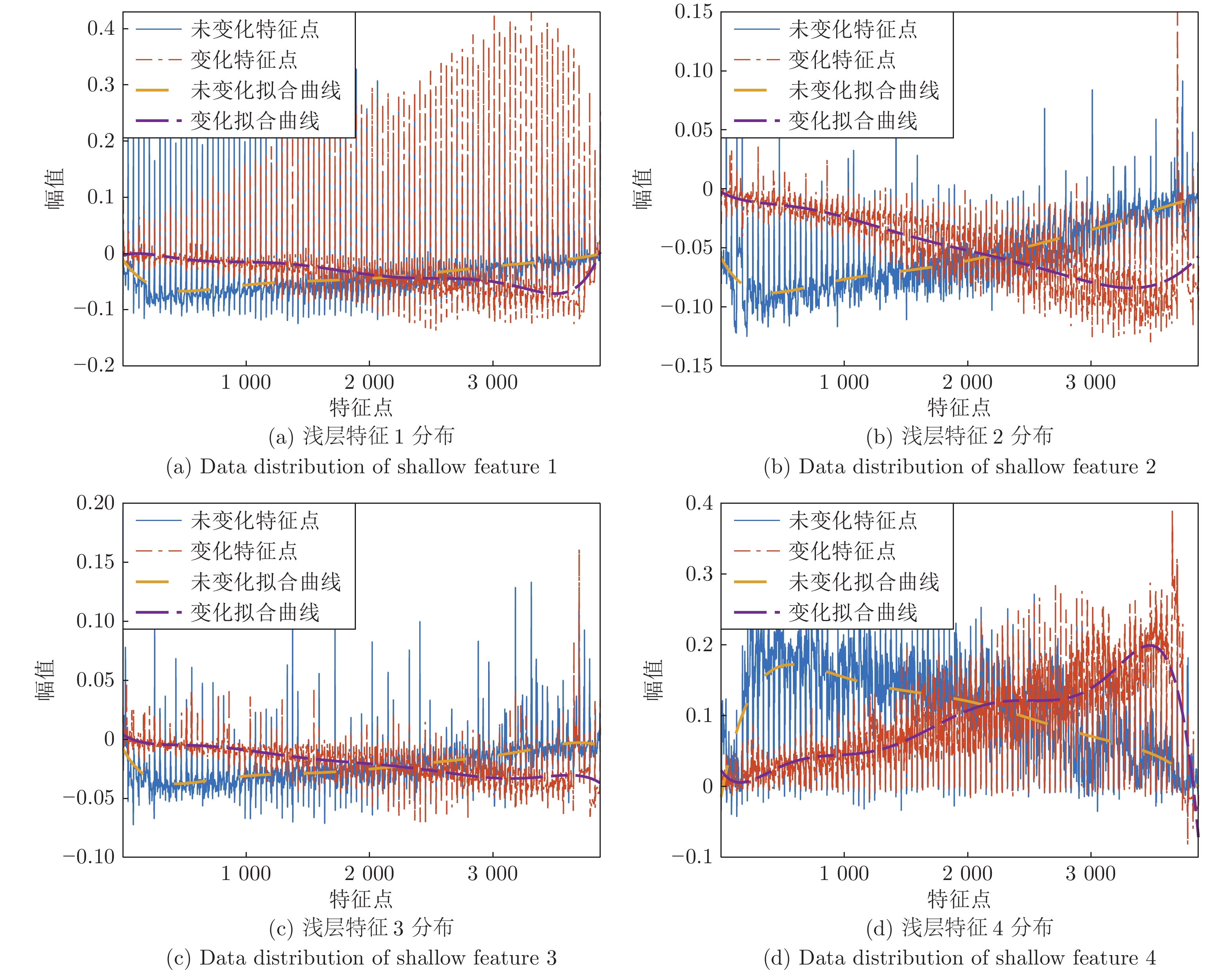
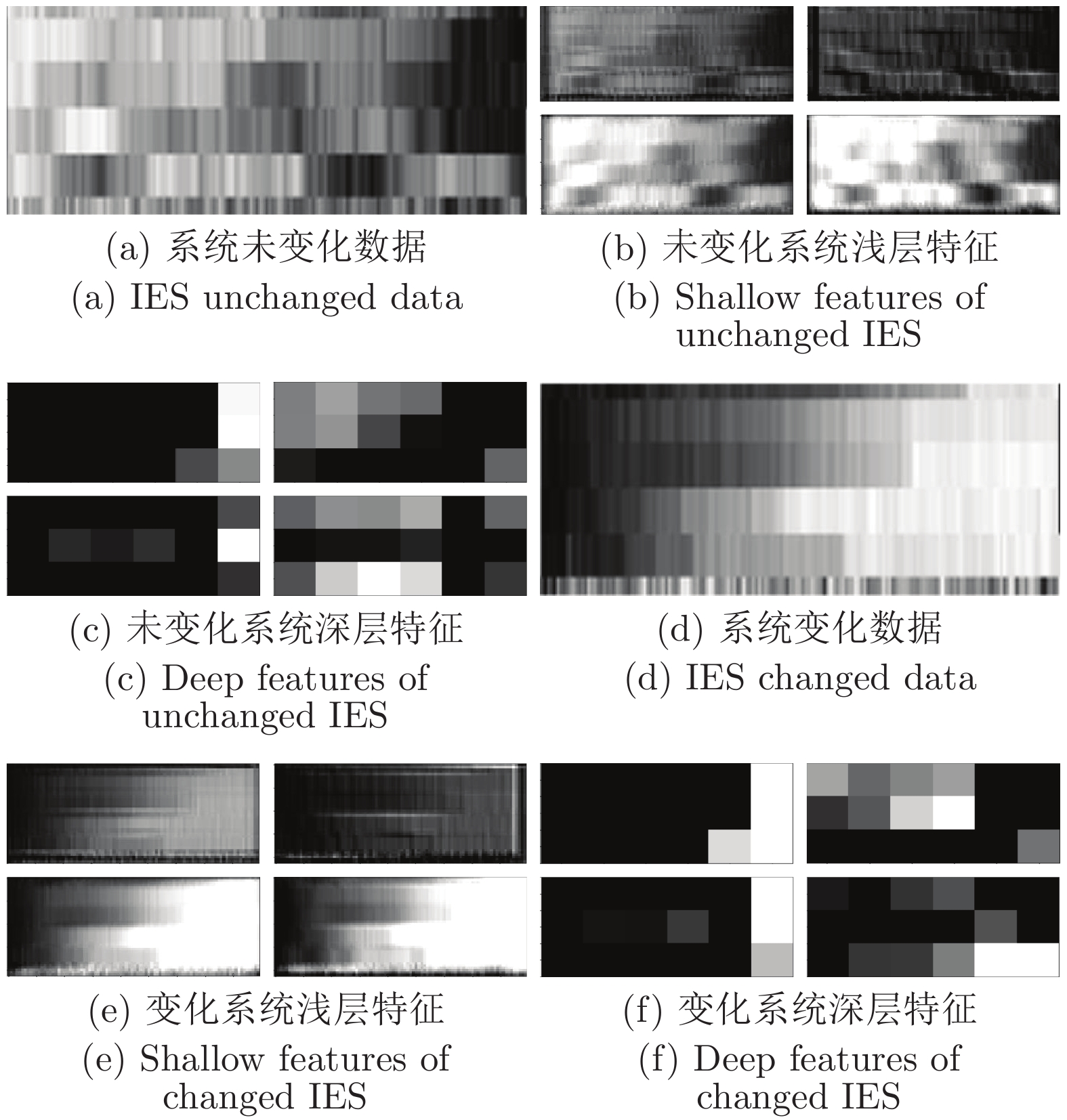
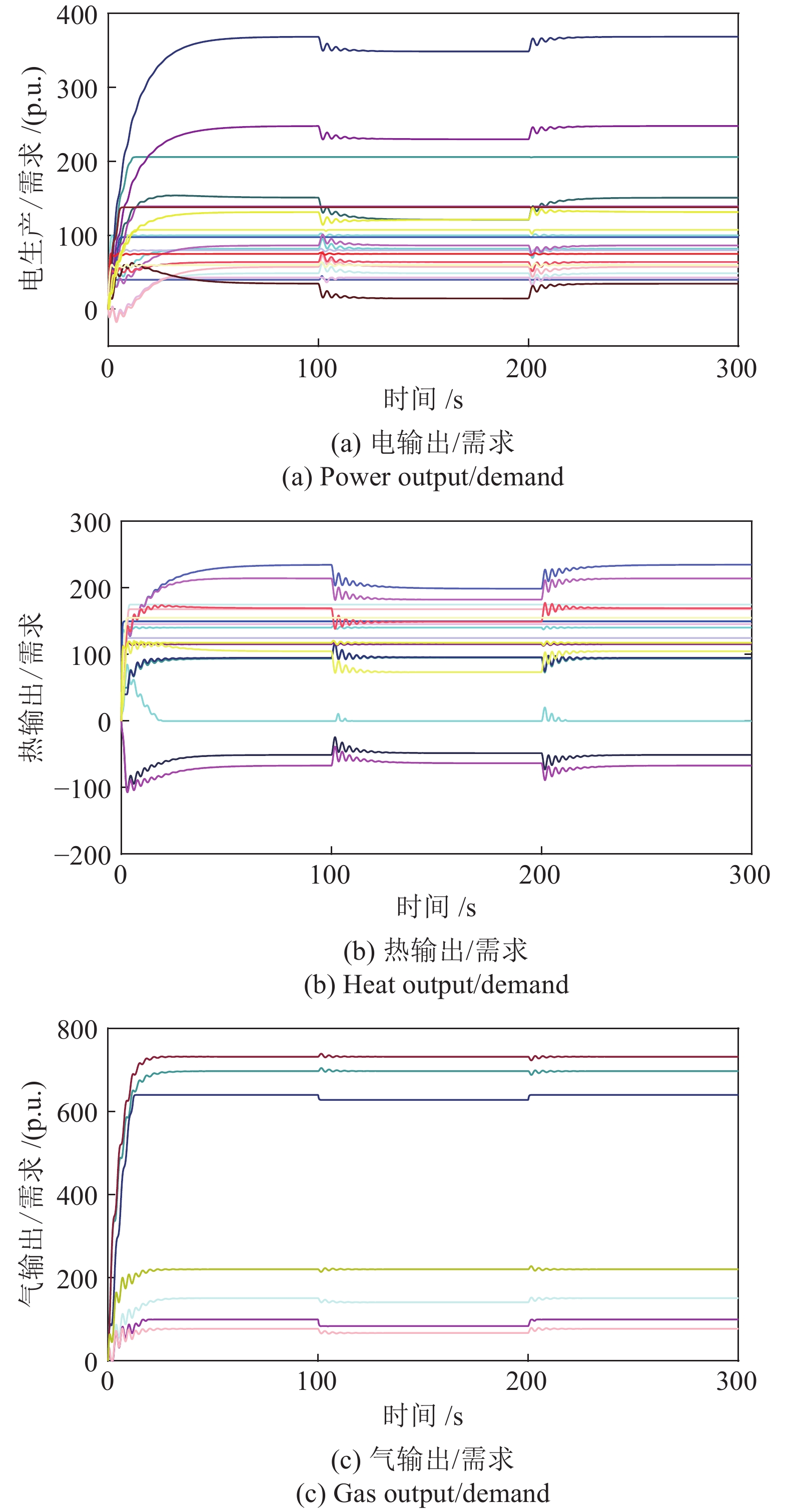
综合能源系统(Integrated energy system, IES)运行状态分析常以广泛化信息技术应用提供的数据为支撑, 然而传感器故障、网络通信中断等信息异常导致的数据缺失会直接影响数据质量. 在考虑数据缺失的情况下, 本文提出了一种基于关联信息对抗学习的综合能源系统运行状态分析方法. 首先构建深度生成对抗网络(Generative adversarial network, GAN)对数据缺失部分进行可靠性补偿. 在设计生成器结构过程中, 通过引入系统拓扑邻接矩阵对生成器输入数据进行优化排序, 进而在训练过程中采用设计的多属性融合生成器损失函数, 促使生成器进一步得到高精度补偿数据. 接着将判别器提取的不同时刻完整能源数据的特征作为基础, 采用浅层特征分布及深层特征信息差异值融合判断, 从而实现系统运行状态分析. 最后对不同数据缺失补偿及不同类型节点改变情况进行仿真, 验证了本文所提方法的可行性与有效性.
综合能源系统(Integrated energy system, IES)运行状态分析常以广泛化信息技术应用提供的数据为支撑, 然而传感器故障、网络通信中断等信息异常导致的数据缺失会直接影响数据质量. 在考虑数据缺失的情况下, 本文提出了一种基于关联信息对抗学习的综合能源系统运行状态分析方法. 首先构建深度生成对抗网络(Generative adversarial network, GAN)对数据缺失部分进行可靠性补偿. 在设计生成器结构过程中, 通过引入系统拓扑邻接矩阵对生成器输入数据进行优化排序, 进而在训练过程中采用设计的多属性融合生成器损失函数, 促使生成器进一步得到高精度补偿数据. 接着将判别器提取的不同时刻完整能源数据的特征作为基础, 采用浅层特征分布及深层特征信息差异值融合判断, 从而实现系统运行状态分析. 最后对不同数据缺失补偿及不同类型节点改变情况进行仿真, 验证了本文所提方法的可行性与有效性.



2020, 46(9): 1798-1808.
doi: 10.16383/j.aas.c200154
cstr: 32138.14.j.aas.c200154
摘要:
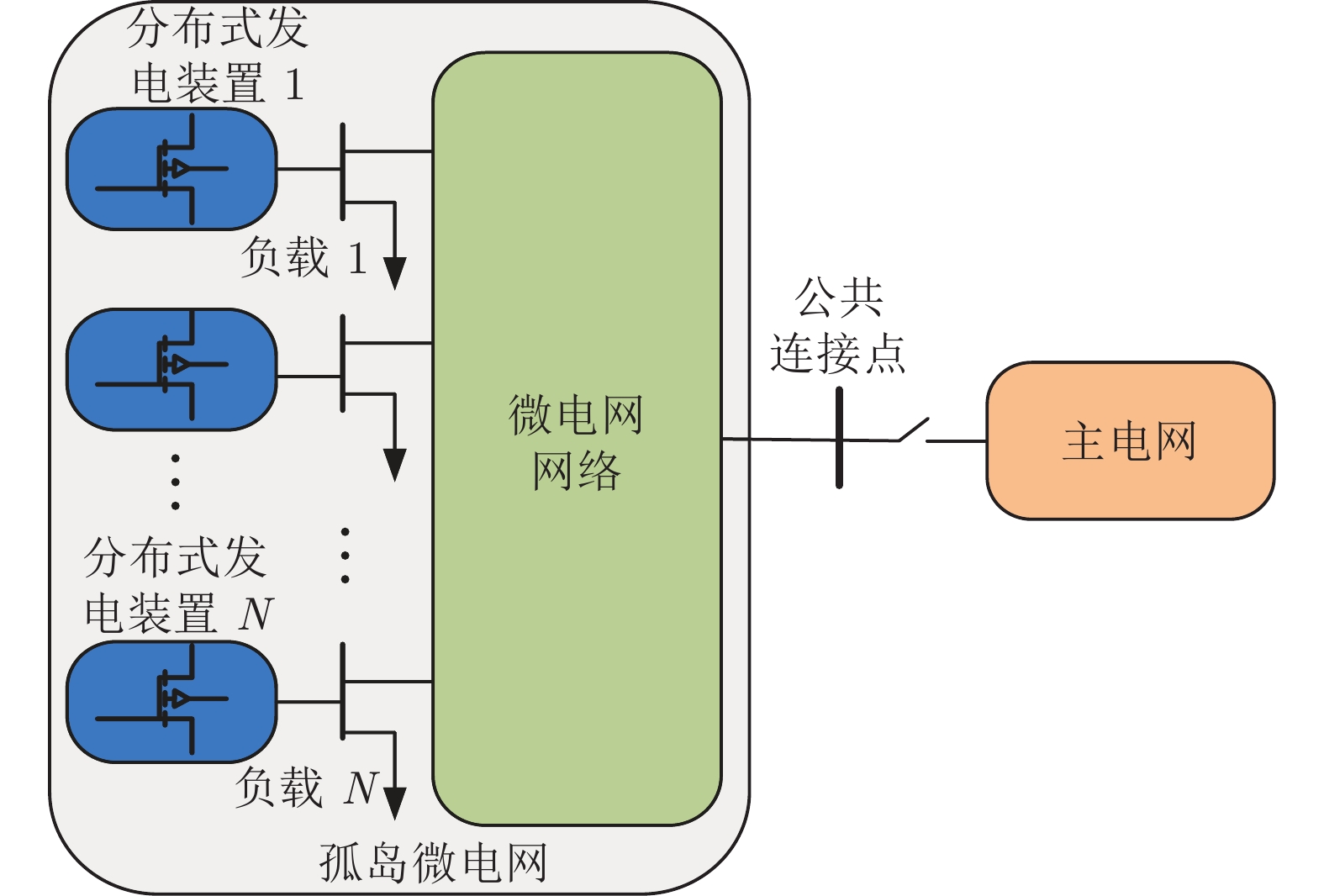
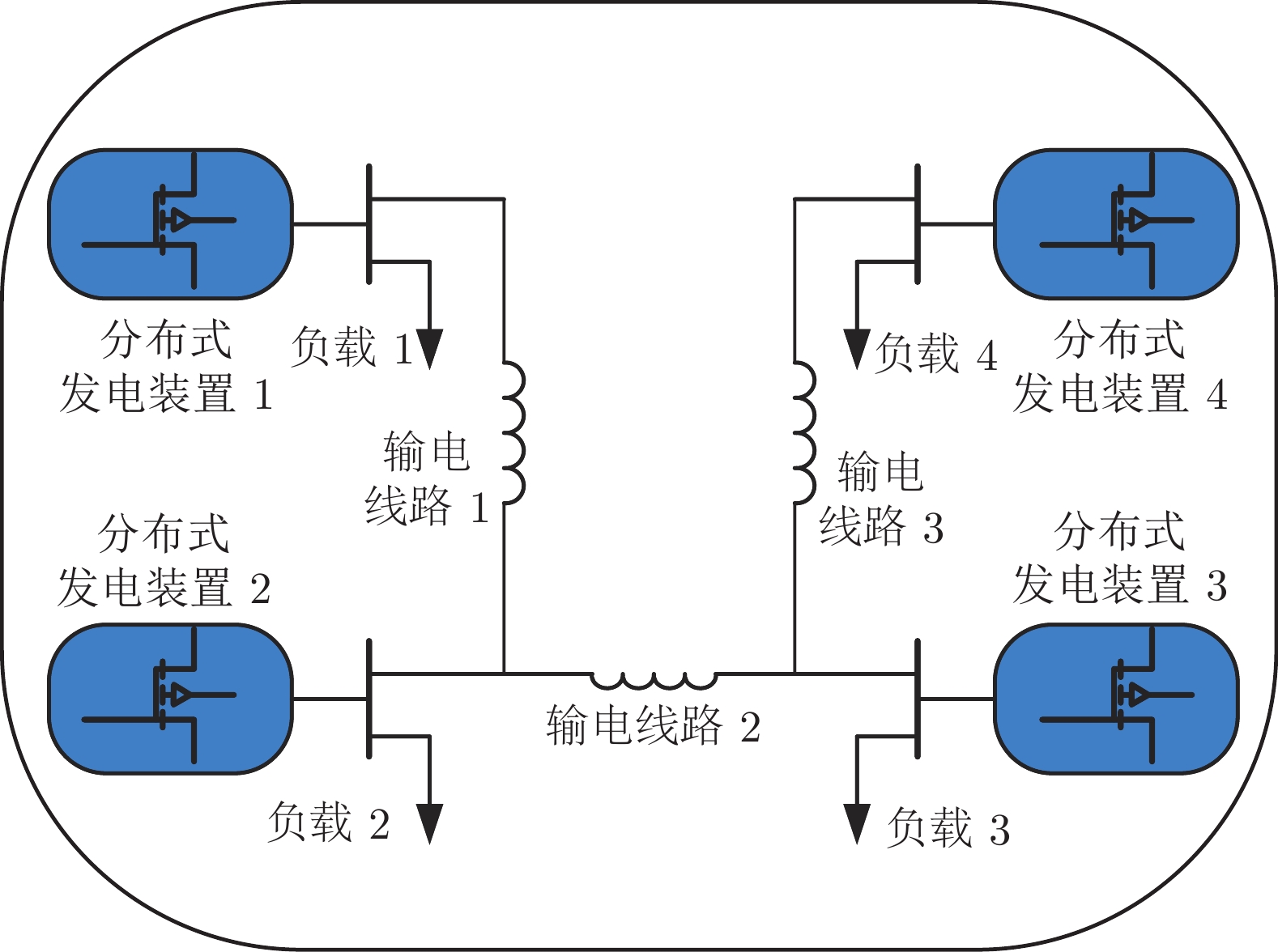
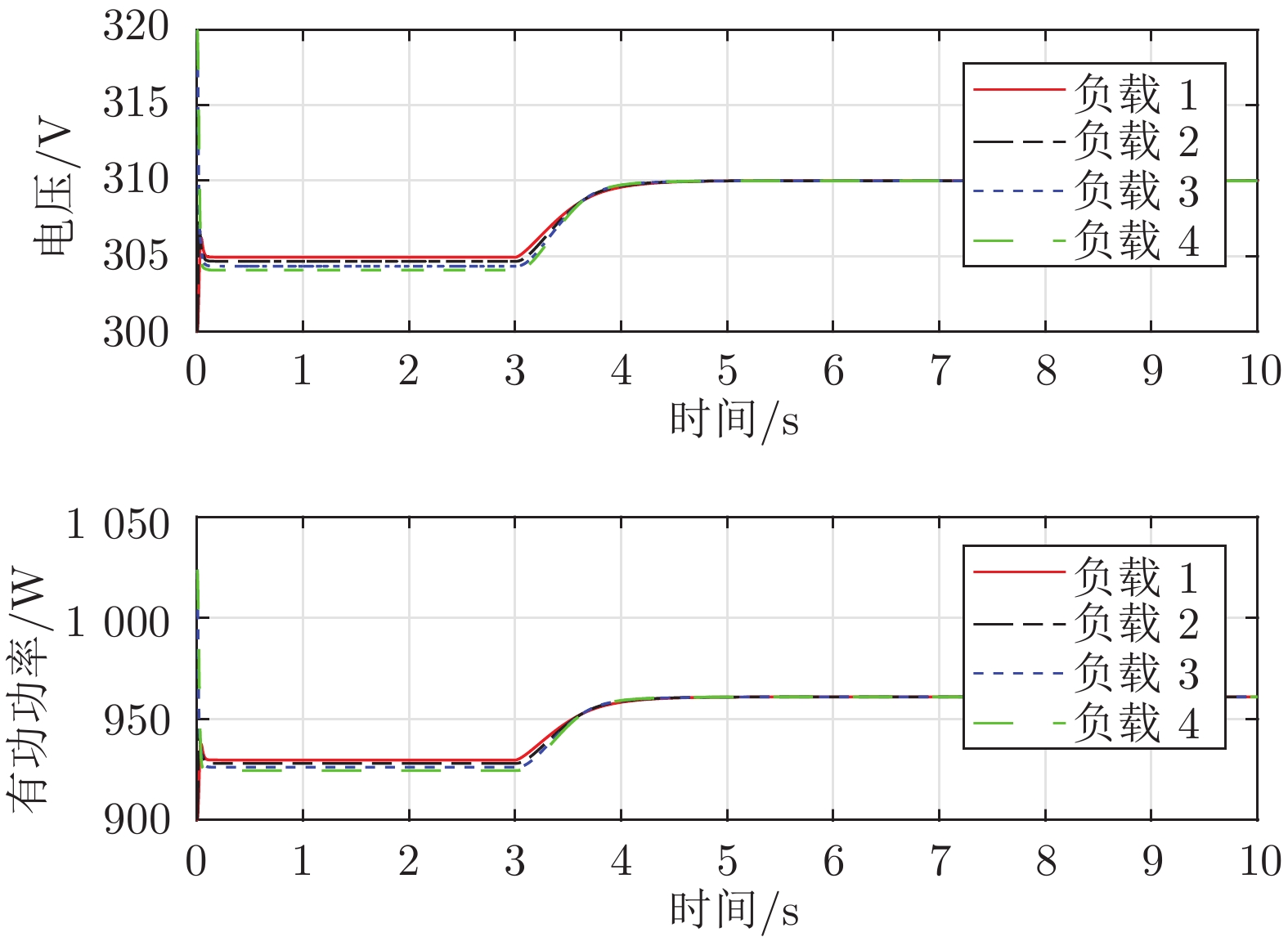
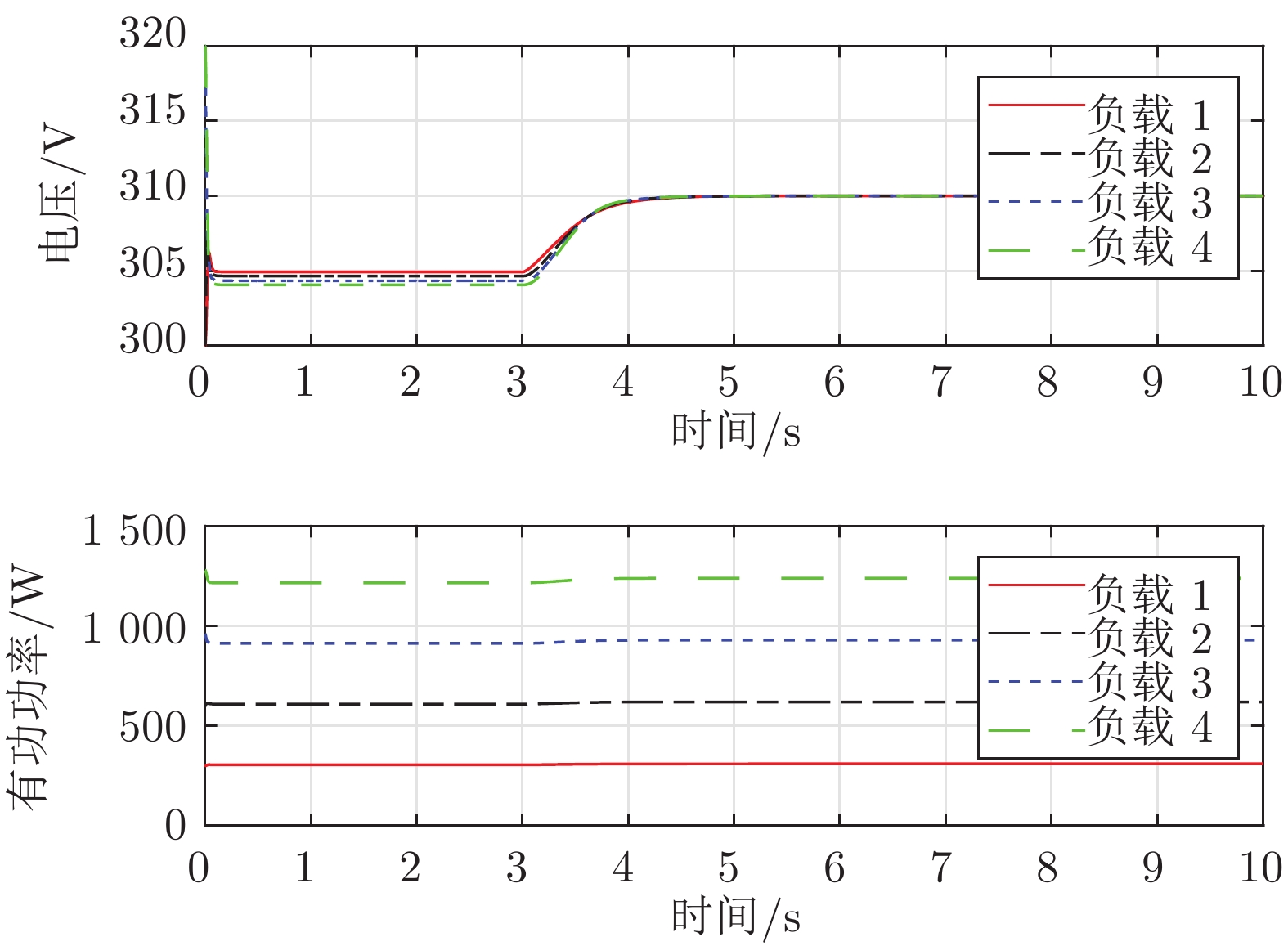
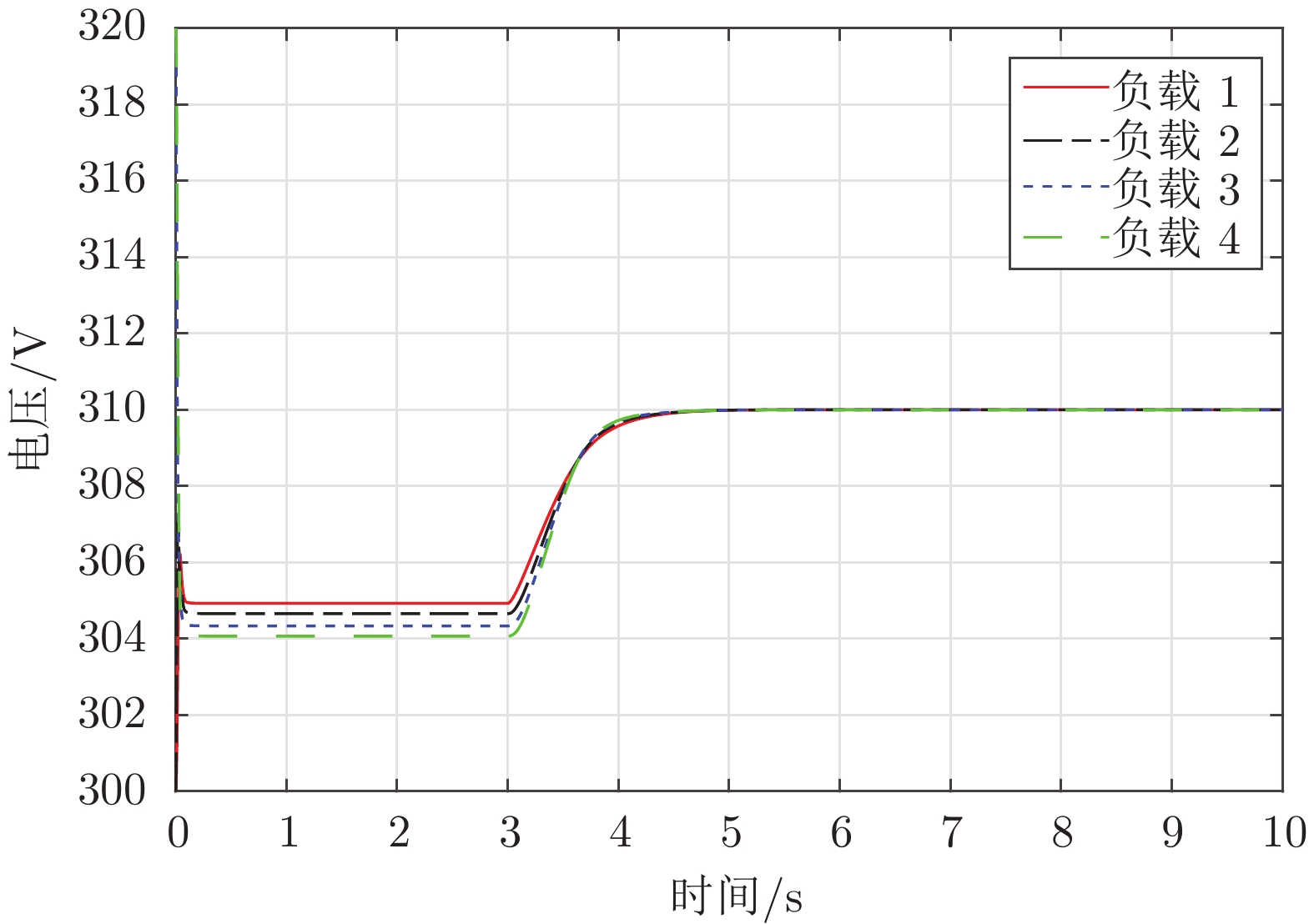
微电网由负载、储能系统和分布式电源互联集成到能源系统中, 微电网系统可以作为一个整体系统与电网并行运行或以孤岛模式运行. 负载建模是微电网运行和管理中的一个基本问题. 本文着重解决以下两个关键问题: 1)协调负载模型结构的合理性和简洁性; 2)负载模型参数的校准. 与常规负载建模方法不同, 本文提出了一类数据驱动建模方法以同时实现负载模型结构选择和参数校准. 具体地, 该方法从量测数据中稀疏学习静态负载模型和动态负载模型, 其关键方法分别来自于稀疏贝叶斯学习方法和交替方向方法, 即从一组备选非线性字典函数中稀疏学习最主要的非线性项以平衡数据拟合度并实现模型学习. 所提出的方法将机器学习与稀疏表示相结合, 旨在对负载模型从物理角度提供机理解释并向配电网系统操作员提供有关负载的动态信息. 在孤岛微电网测试系统中验证并评估了所提出的算法. 研究测例表明所提出算法从量测数据中实现负载稀疏学习的合理性和对于噪声的鲁棒性.
微电网由负载、储能系统和分布式电源互联集成到能源系统中, 微电网系统可以作为一个整体系统与电网并行运行或以孤岛模式运行. 负载建模是微电网运行和管理中的一个基本问题. 本文着重解决以下两个关键问题: 1)协调负载模型结构的合理性和简洁性; 2)负载模型参数的校准. 与常规负载建模方法不同, 本文提出了一类数据驱动建模方法以同时实现负载模型结构选择和参数校准. 具体地, 该方法从量测数据中稀疏学习静态负载模型和动态负载模型, 其关键方法分别来自于稀疏贝叶斯学习方法和交替方向方法, 即从一组备选非线性字典函数中稀疏学习最主要的非线性项以平衡数据拟合度并实现模型学习. 所提出的方法将机器学习与稀疏表示相结合, 旨在对负载模型从物理角度提供机理解释并向配电网系统操作员提供有关负载的动态信息. 在孤岛微电网测试系统中验证并评估了所提出的算法. 研究测例表明所提出算法从量测数据中实现负载稀疏学习的合理性和对于噪声的鲁棒性.



2020, 46(9): 1809-1817.
doi: 10.16383/j.aas.c200176
cstr: 32138.14.j.aas.c200176
摘要:
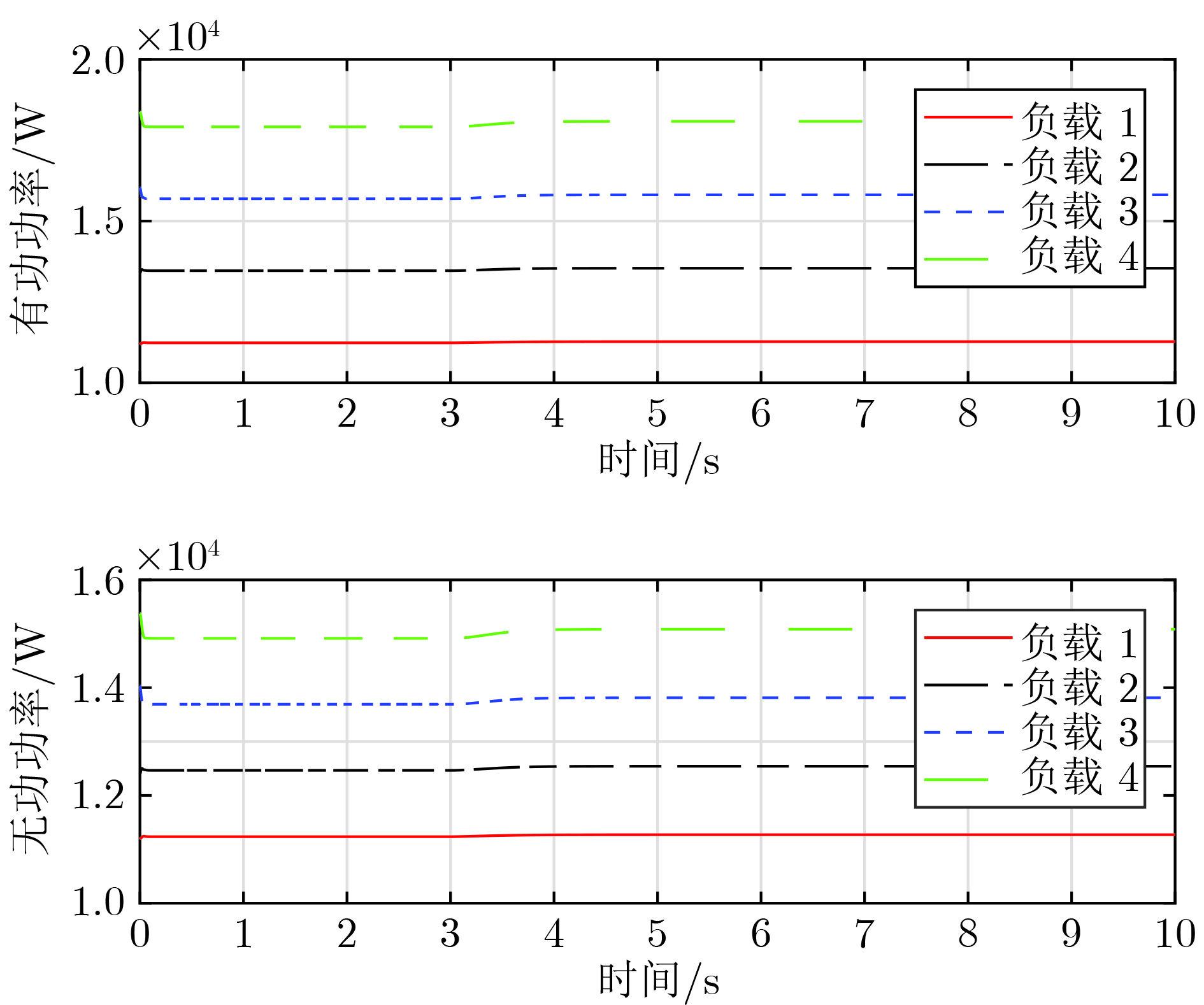
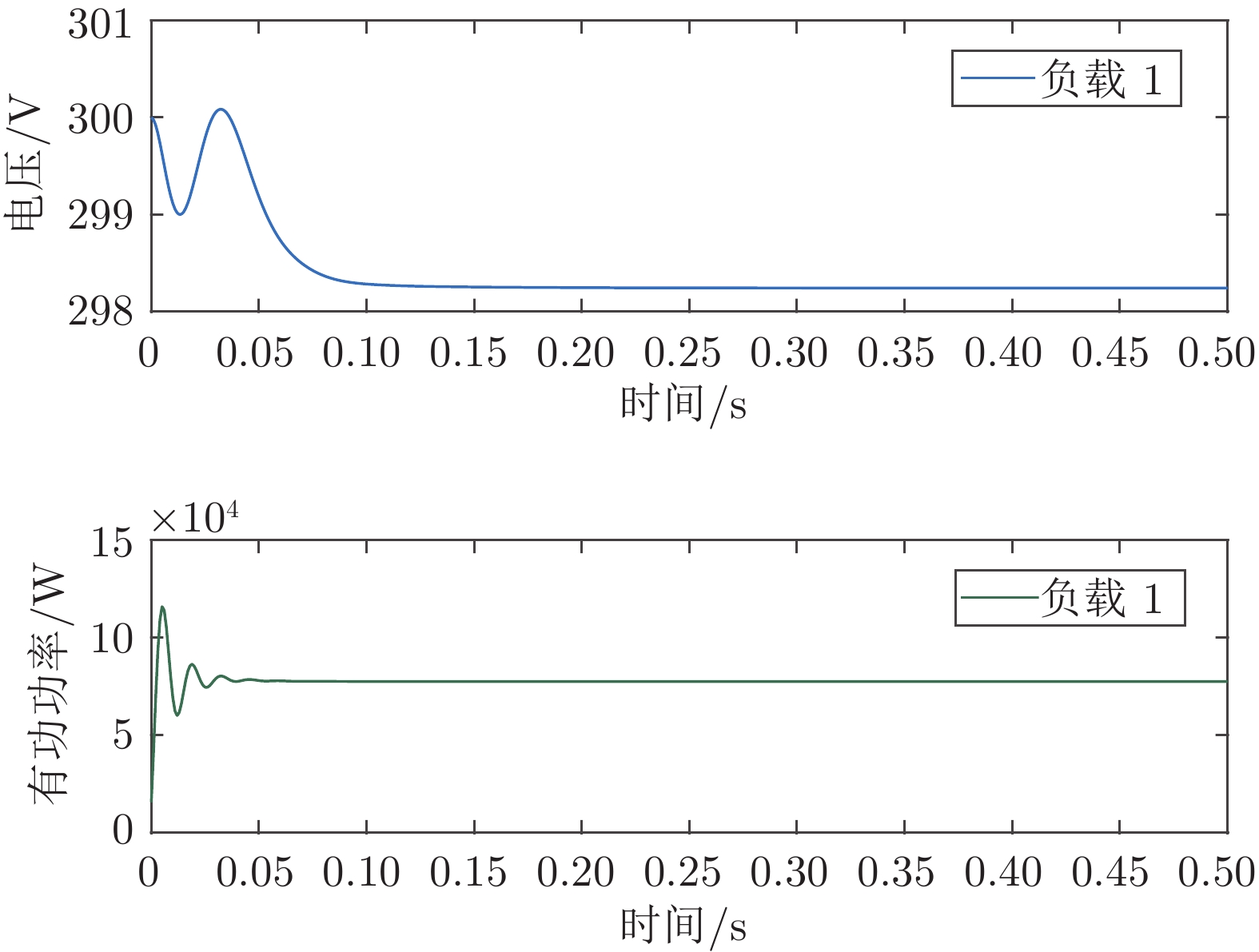
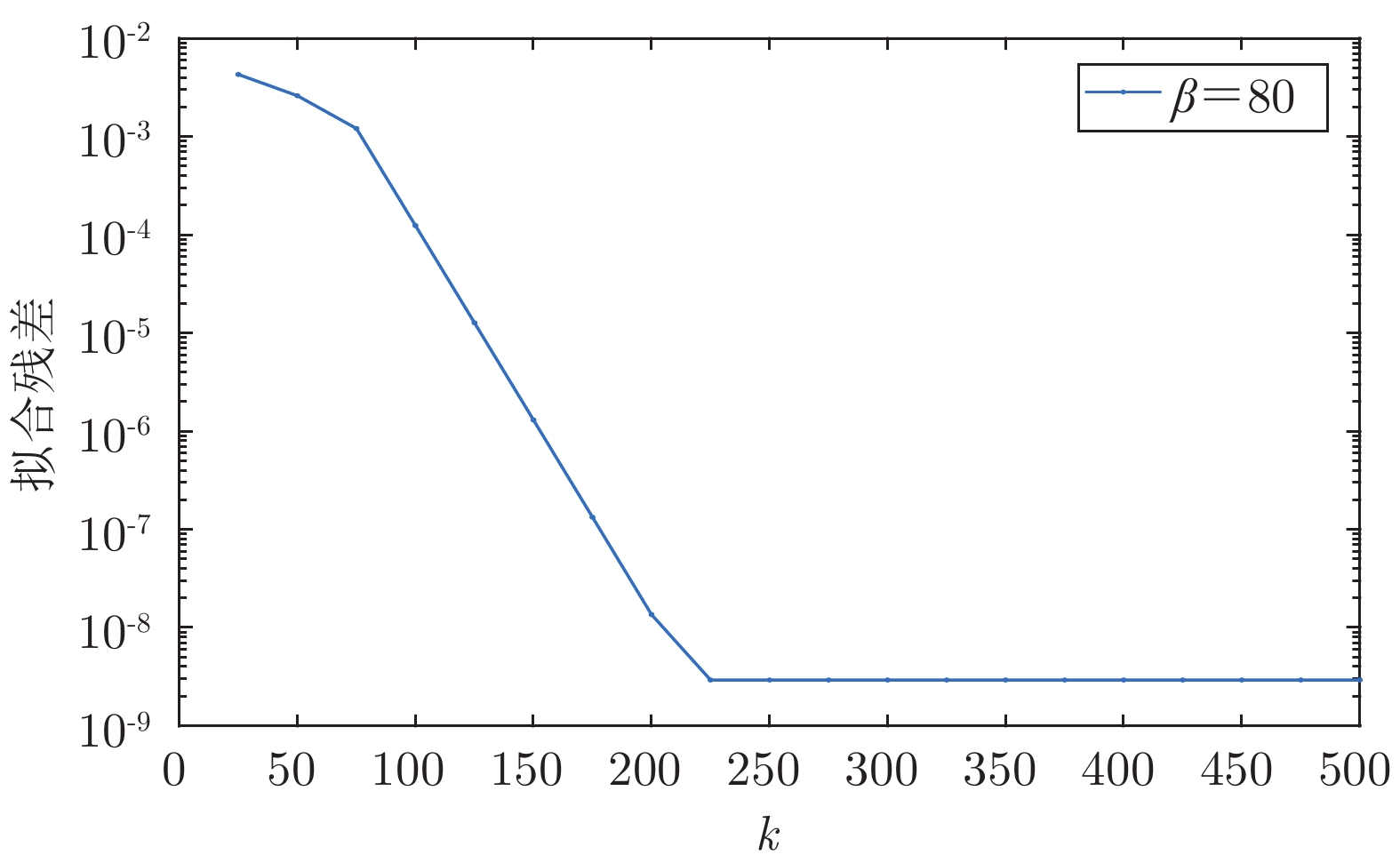
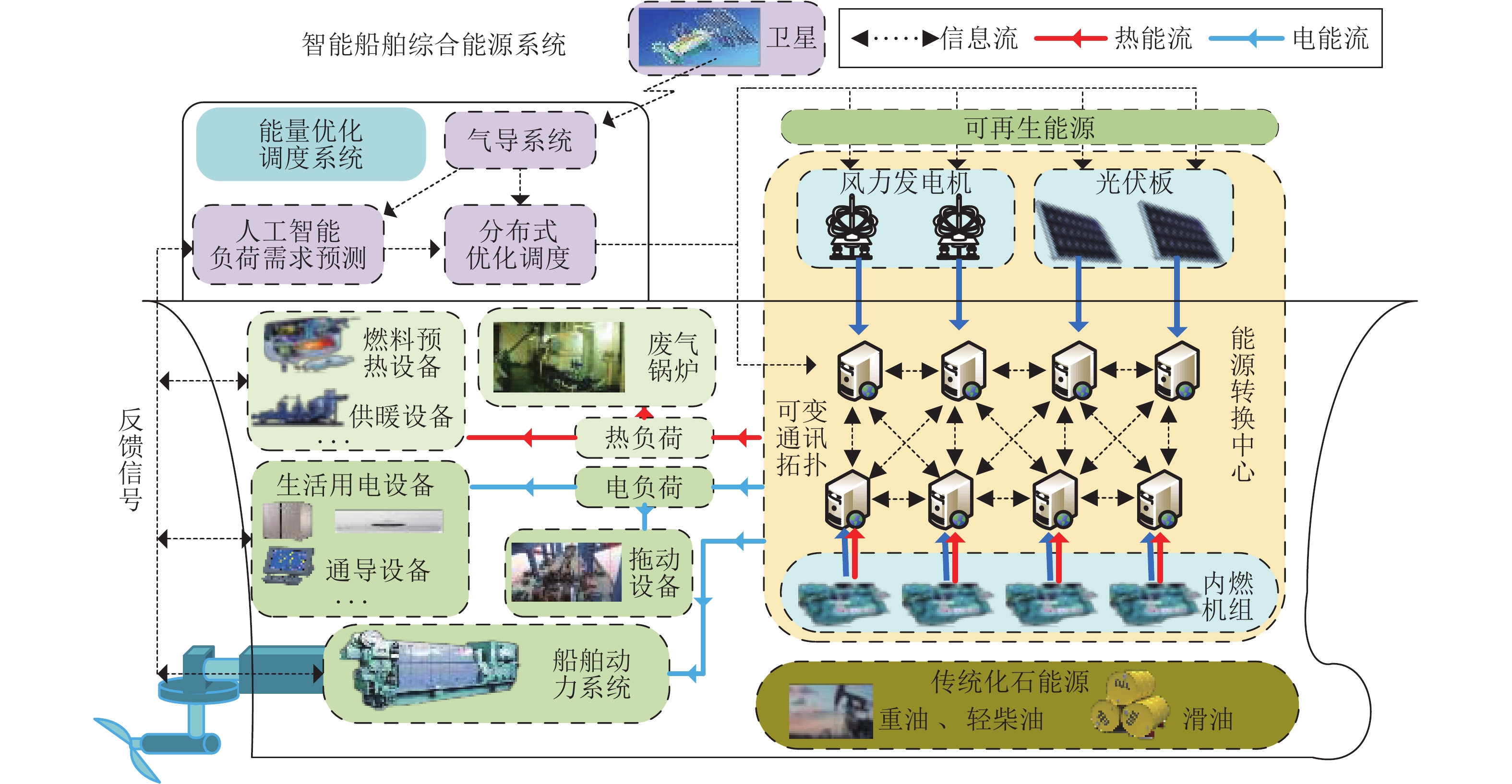
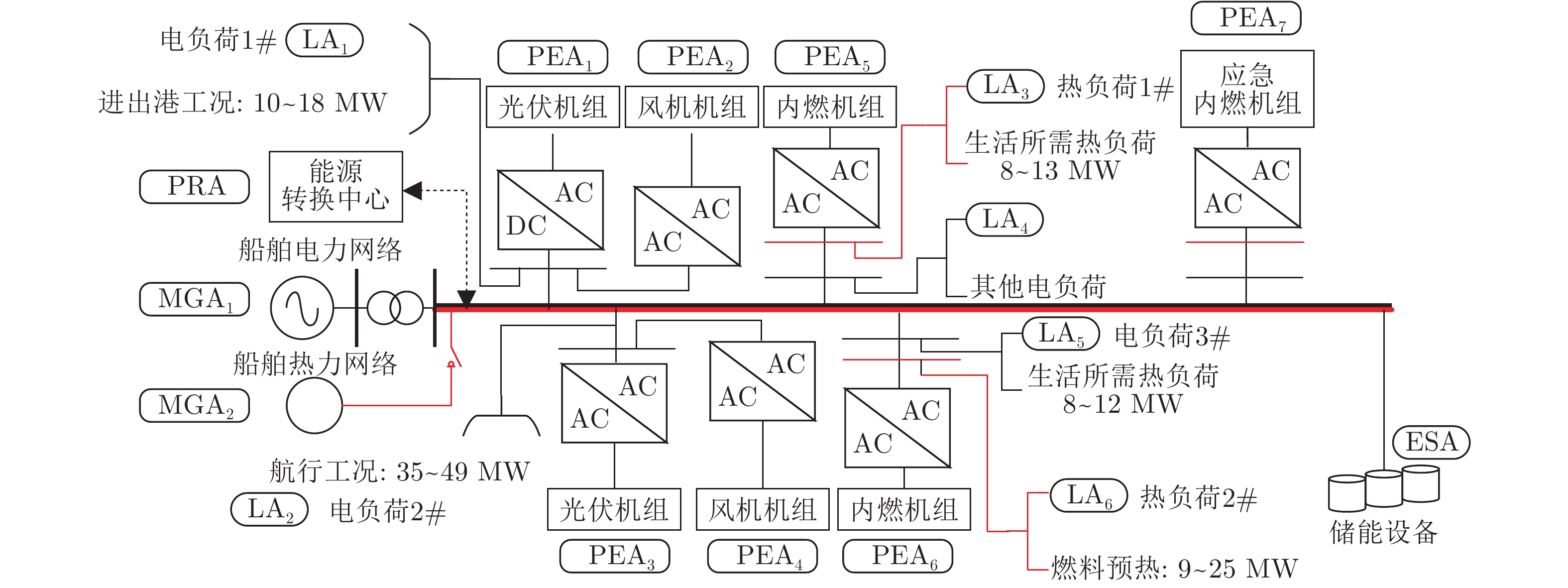
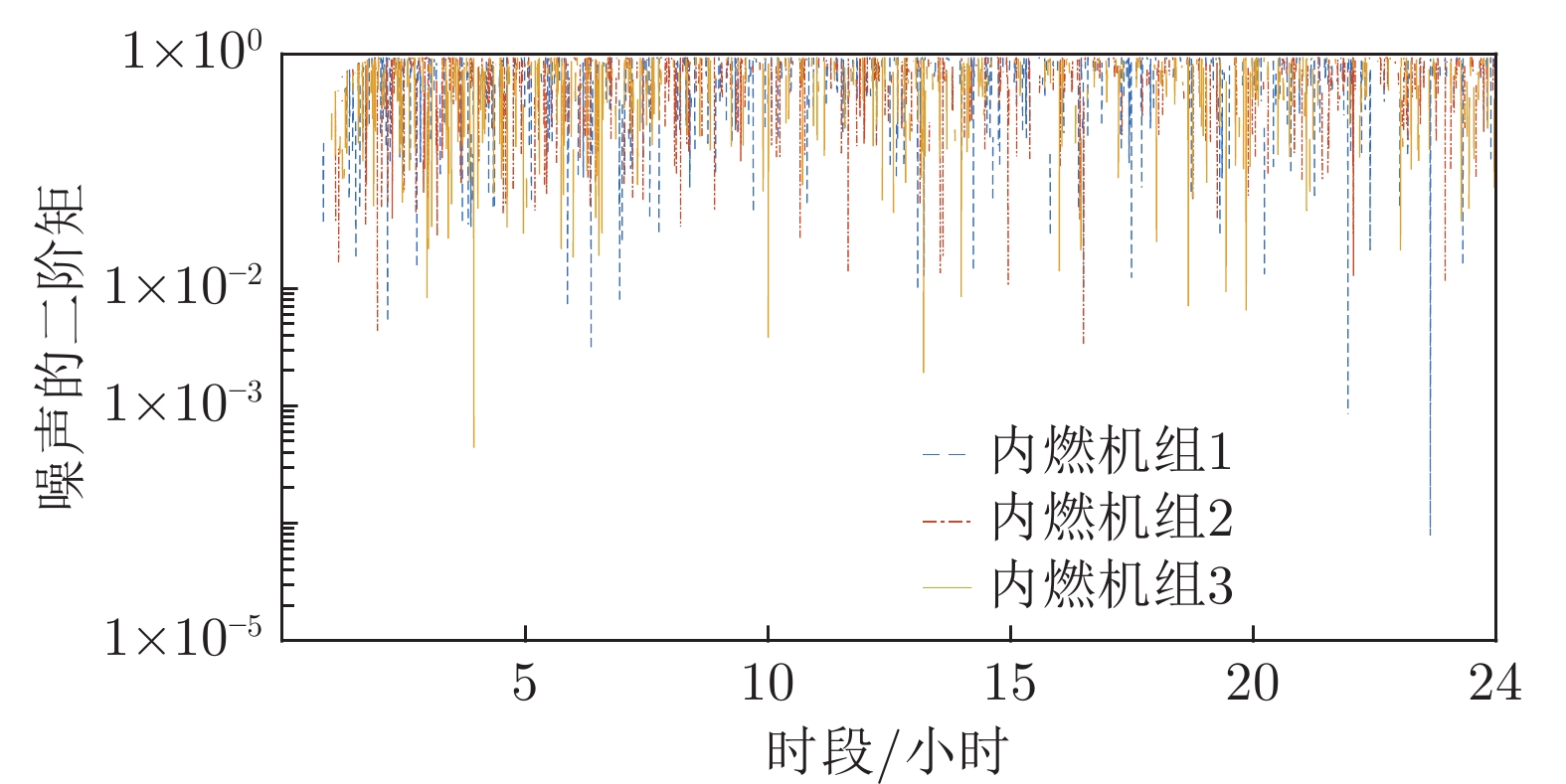
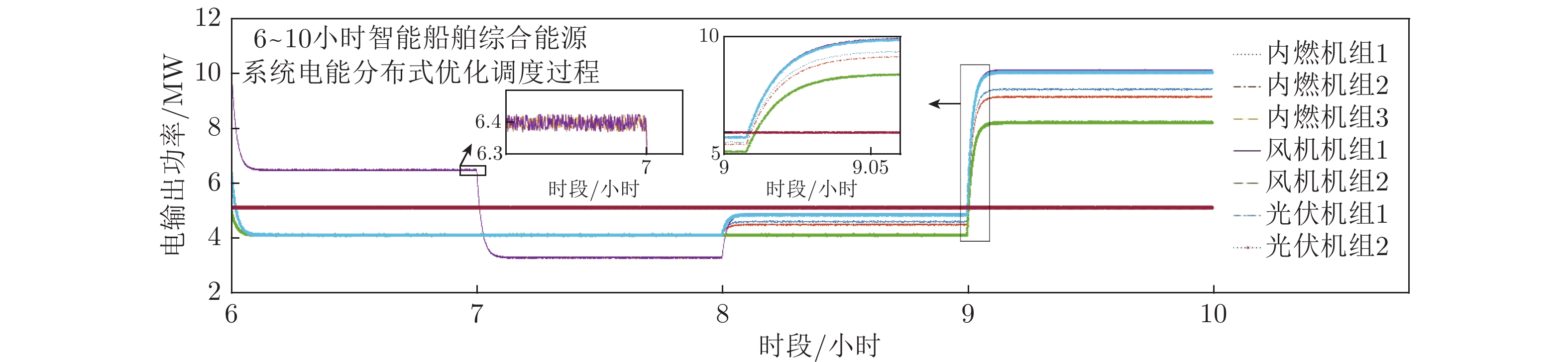
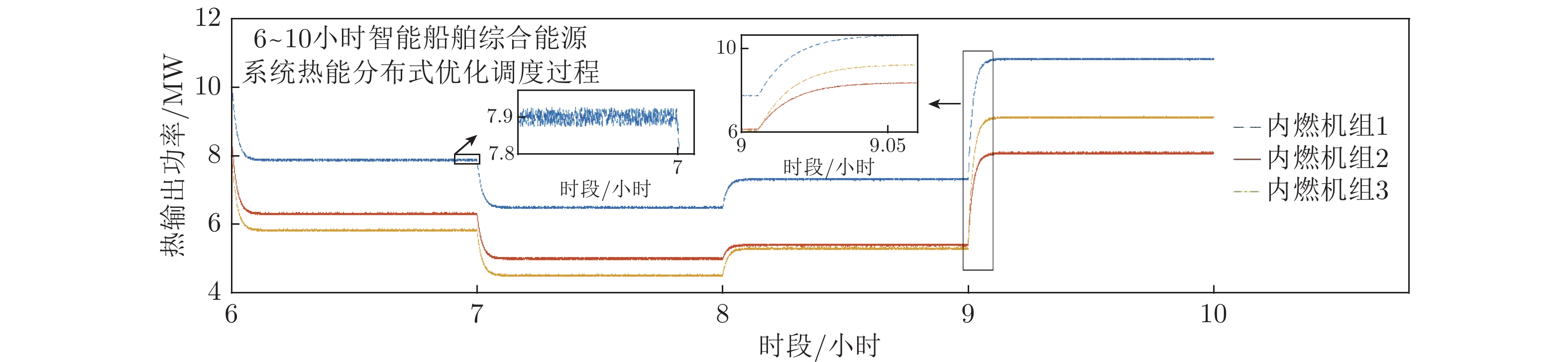
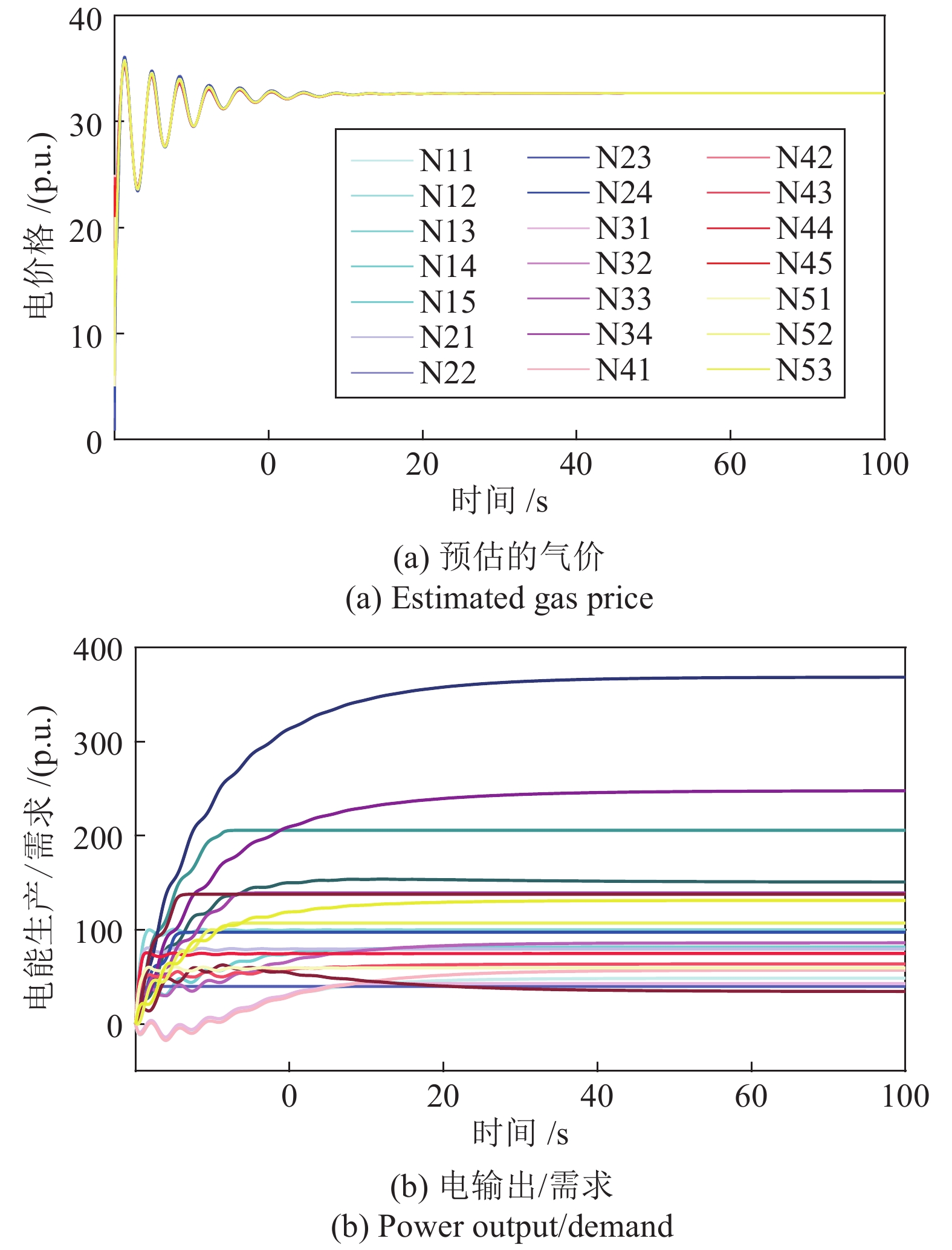
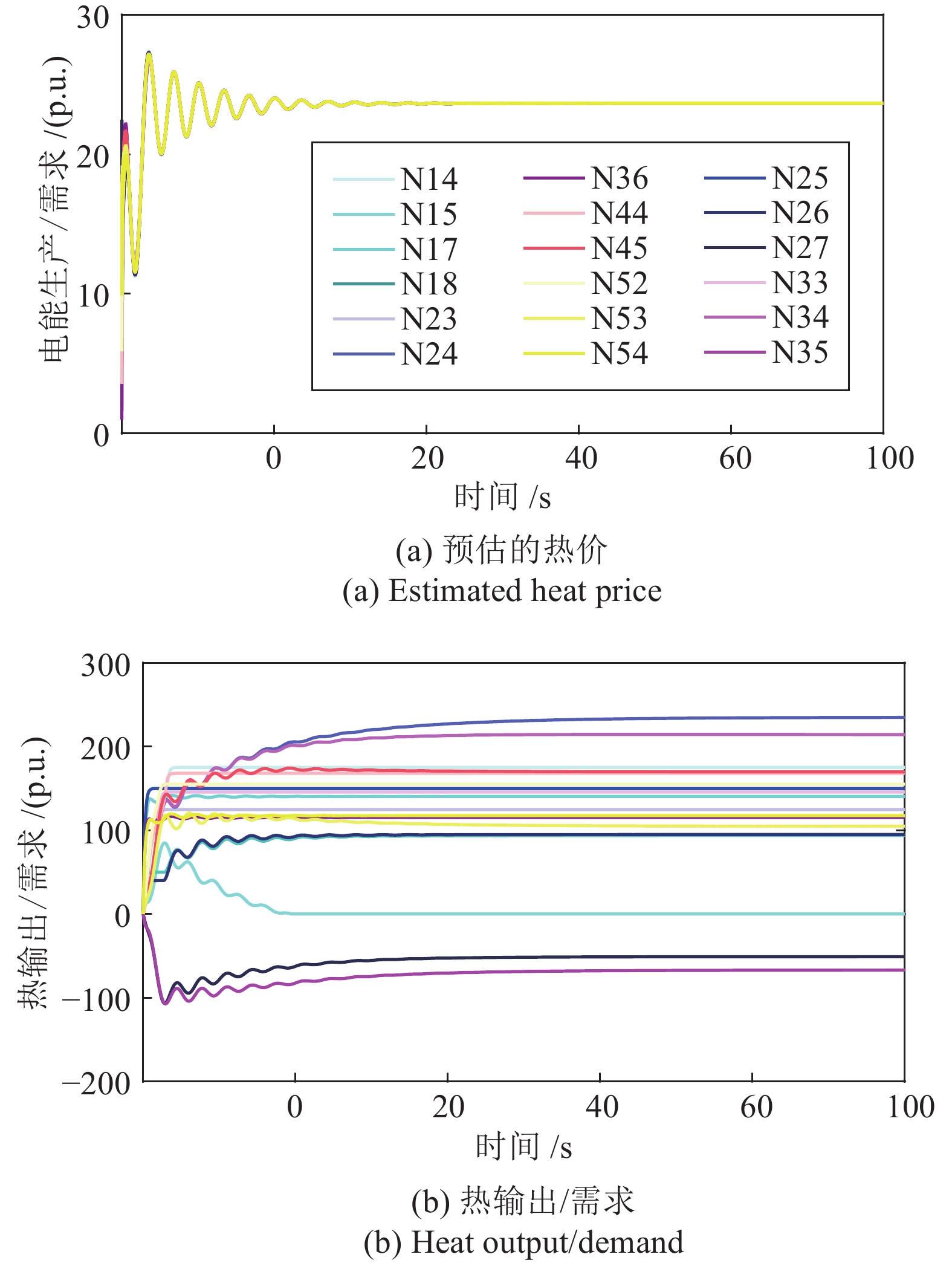
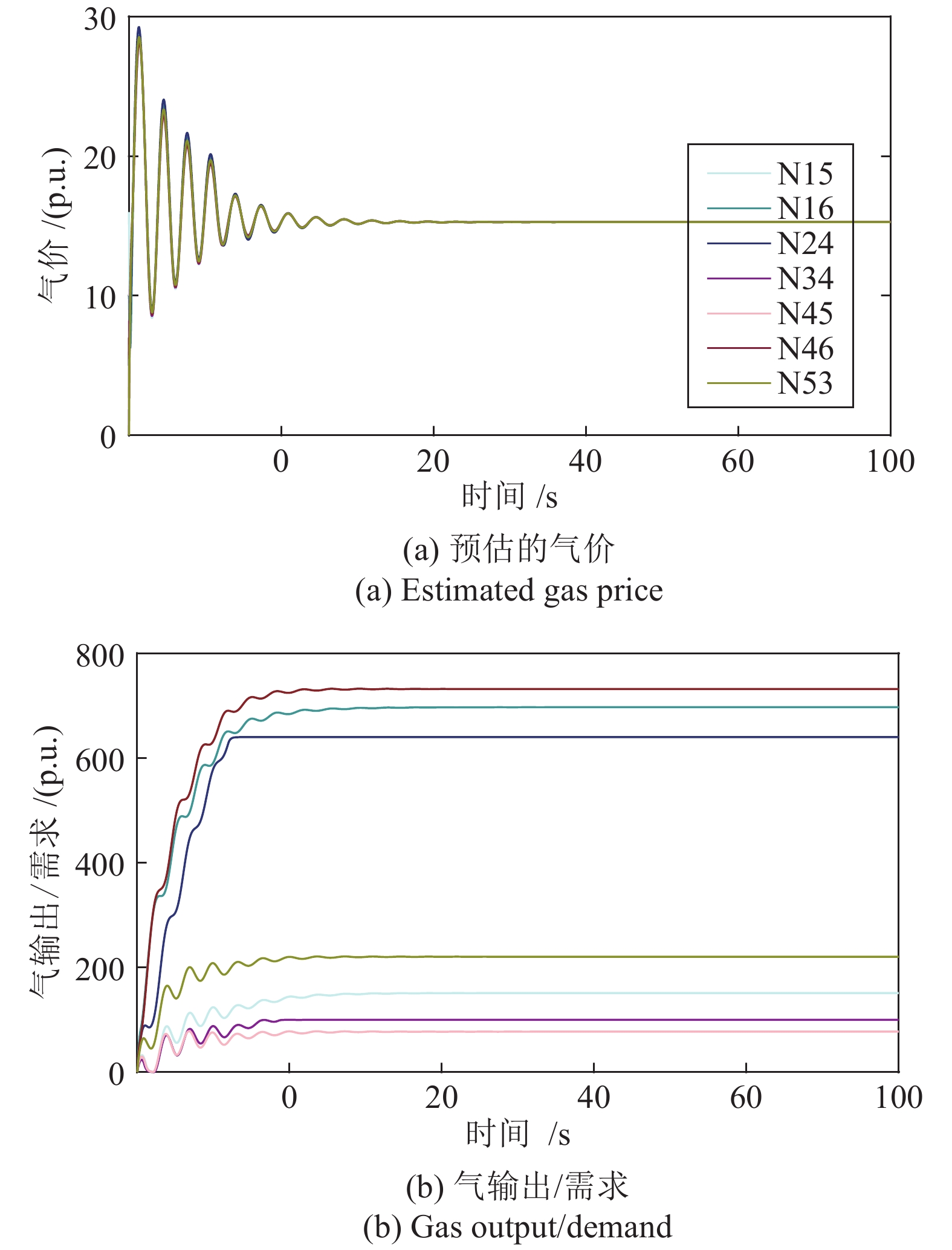
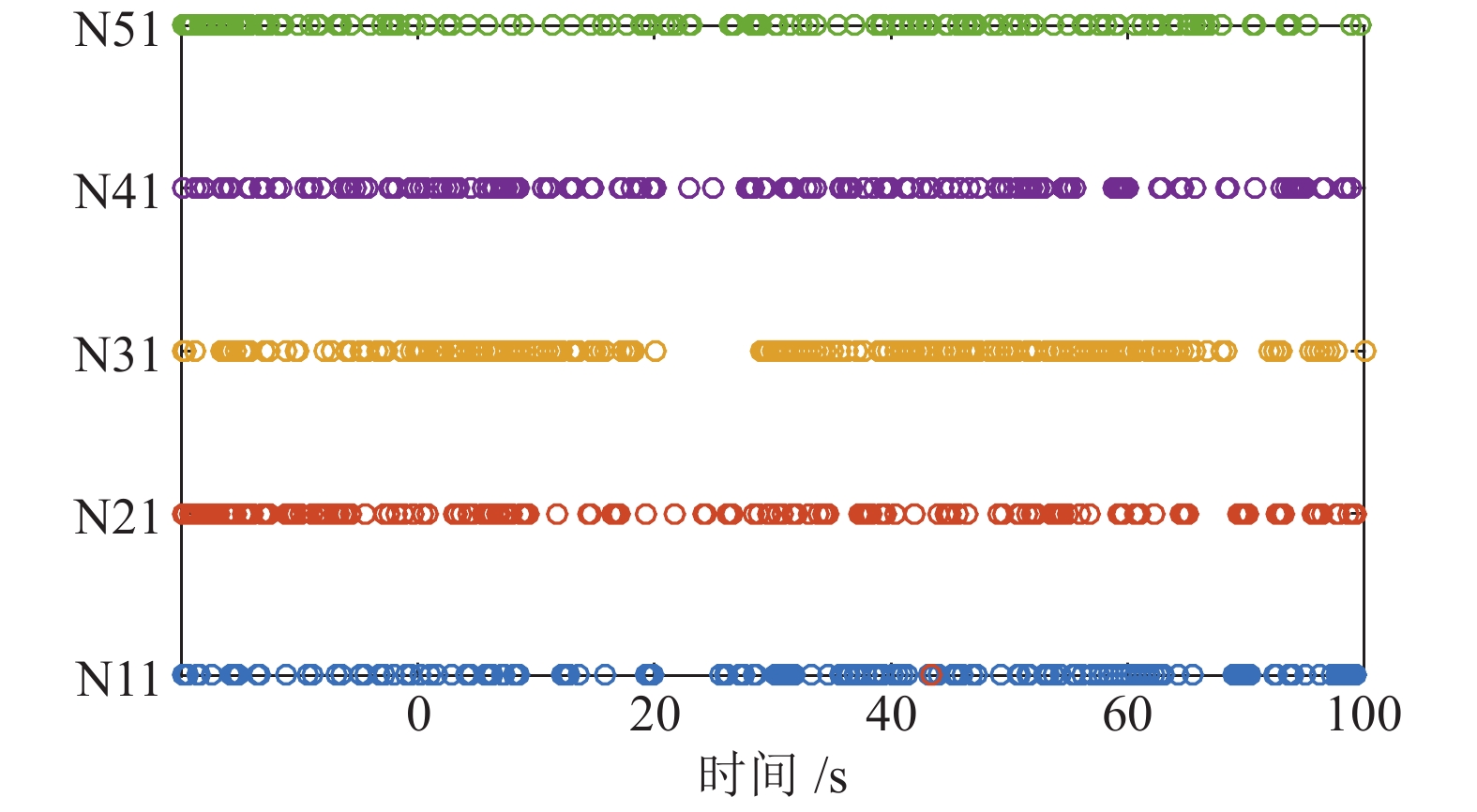
船舶航运污染是阻碍海洋经济发展、海洋强国建设的瓶颈问题. 智能船舶为航运业绿色环保发展提供了重要手段. 为进一步开发船载新能源, 提升能源综合利用效率, 降低船舶航运污染排放, 本文构建以能量优化调度系统为核心、以能源转换中心为枢纽的智能船舶综合能源系统; 考虑其特有的动力系统负荷需求、航行低污染排放量标准以及电−热多能流耦合供能特性, 建立智能船舶综合能源系统能量优化调度目标函数及相关约束条件; 并基于宽度学习、带有广义噪声的多智能体分布式优化相关理论, 提出可快速准确地预测全航程各时段负荷需求、可容纳复杂干扰的分布式优化调度方法, 实现高效的智能船舶综合能源系统能量优化调度, 保障智能船舶经济、可靠、稳定航行. 仿真分析验证了所提出智能船舶综合能源系统分布式优化调度方法的有效性.
船舶航运污染是阻碍海洋经济发展、海洋强国建设的瓶颈问题. 智能船舶为航运业绿色环保发展提供了重要手段. 为进一步开发船载新能源, 提升能源综合利用效率, 降低船舶航运污染排放, 本文构建以能量优化调度系统为核心、以能源转换中心为枢纽的智能船舶综合能源系统; 考虑其特有的动力系统负荷需求、航行低污染排放量标准以及电−热多能流耦合供能特性, 建立智能船舶综合能源系统能量优化调度目标函数及相关约束条件; 并基于宽度学习、带有广义噪声的多智能体分布式优化相关理论, 提出可快速准确地预测全航程各时段负荷需求、可容纳复杂干扰的分布式优化调度方法, 实现高效的智能船舶综合能源系统能量优化调度, 保障智能船舶经济、可靠、稳定航行. 仿真分析验证了所提出智能船舶综合能源系统分布式优化调度方法的有效性.
2020, 46(9): 1818-1830.
doi: 10.16383/j.aas.c200105
cstr: 32138.14.j.aas.c200105
摘要:
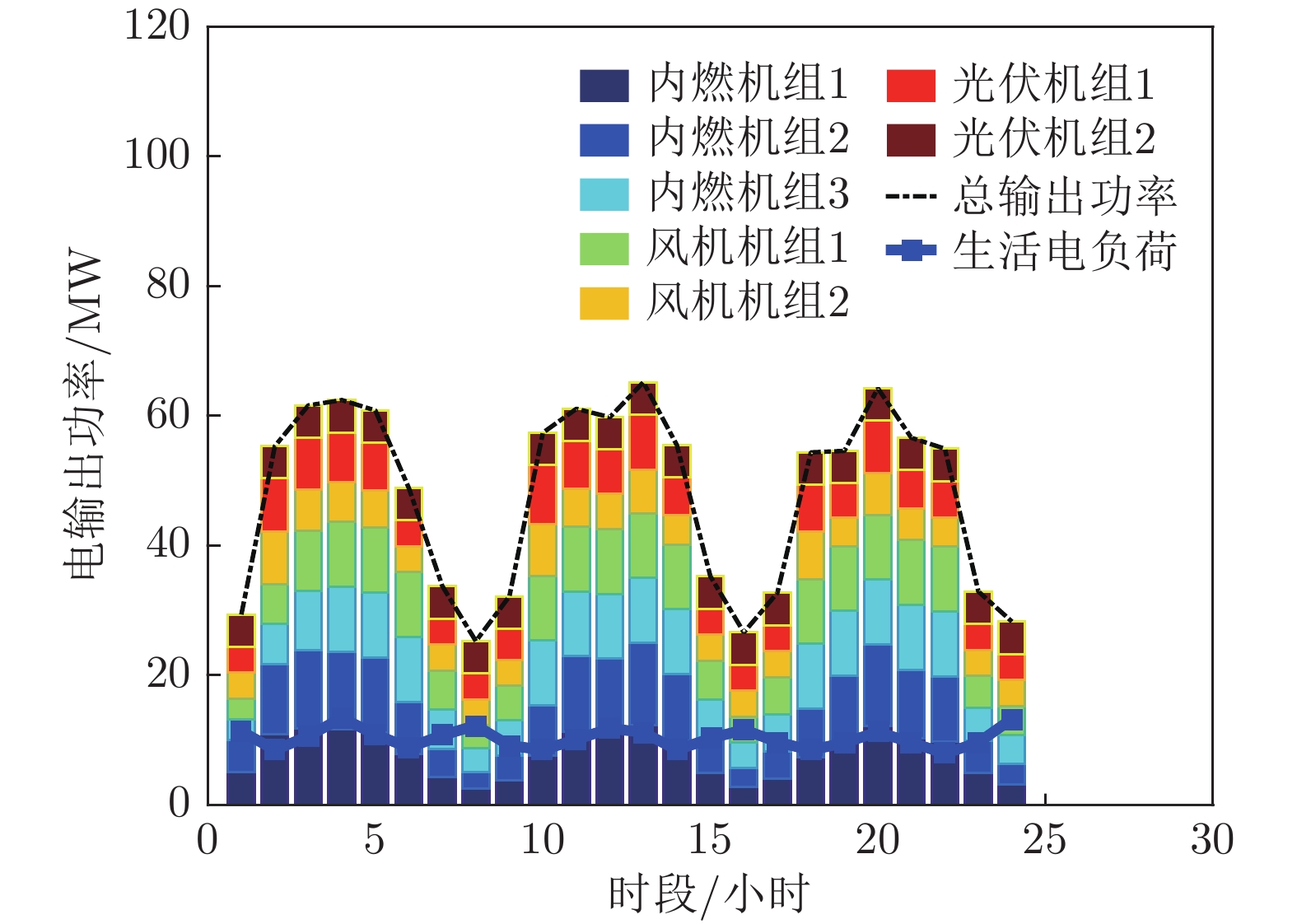
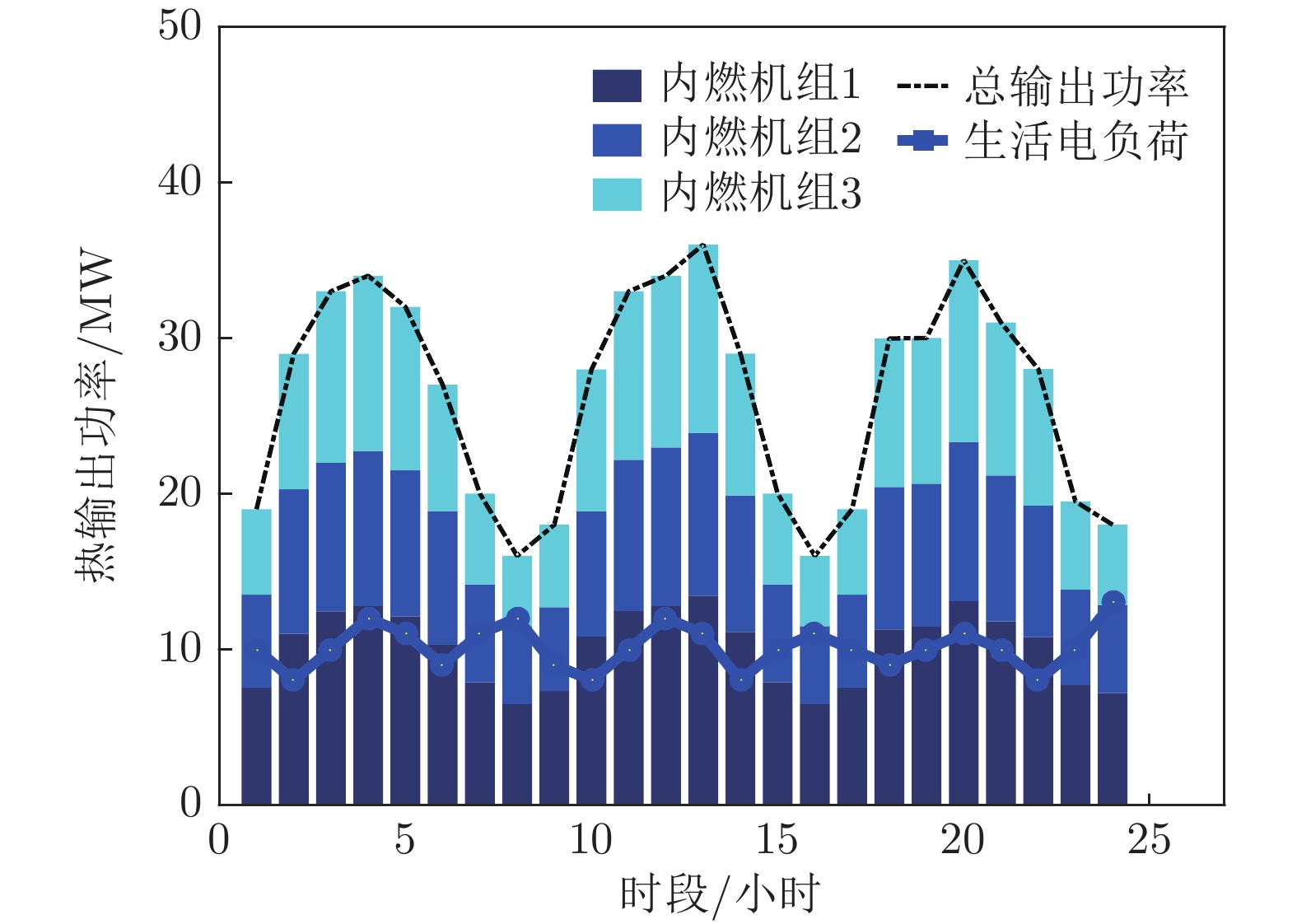
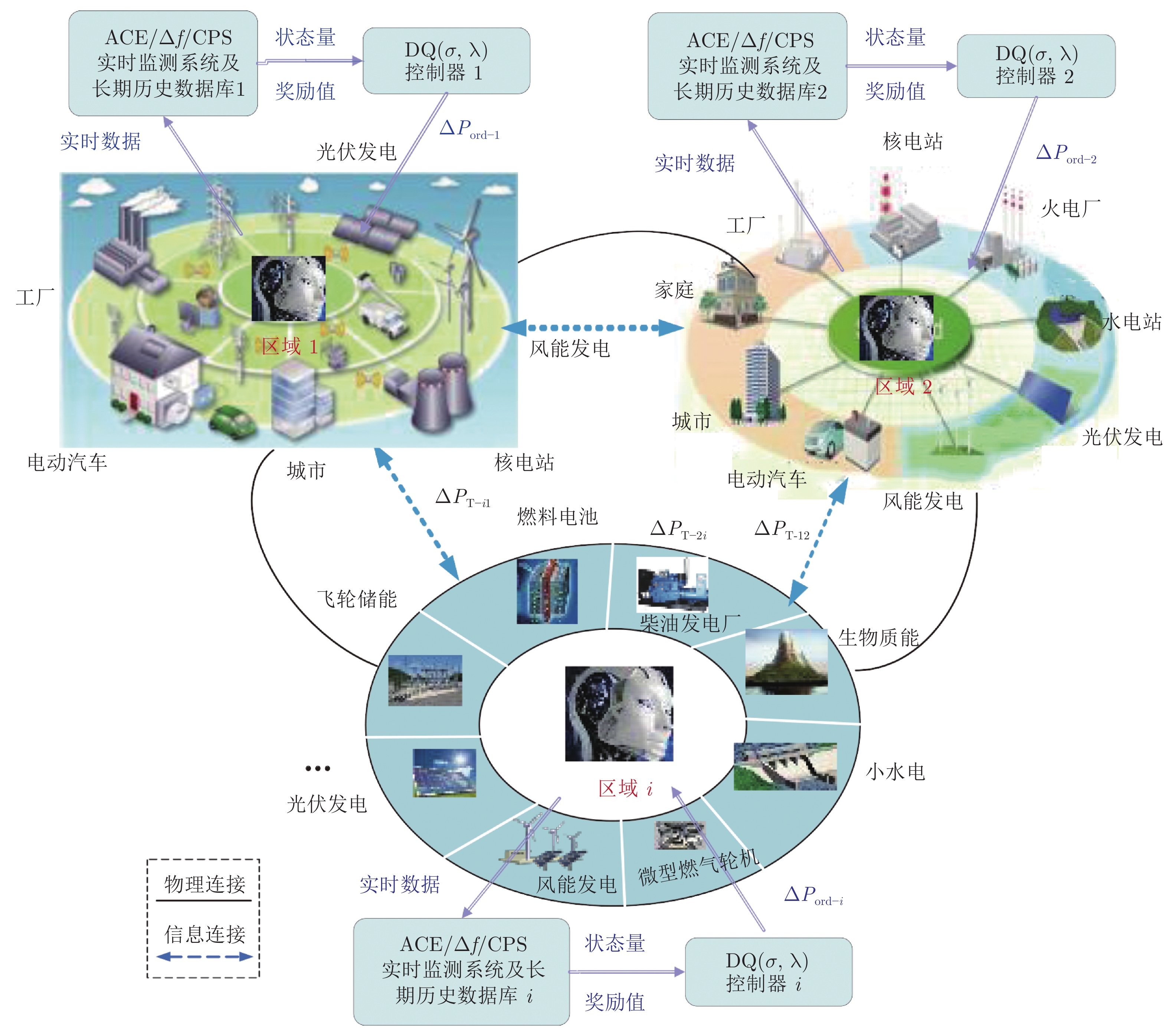
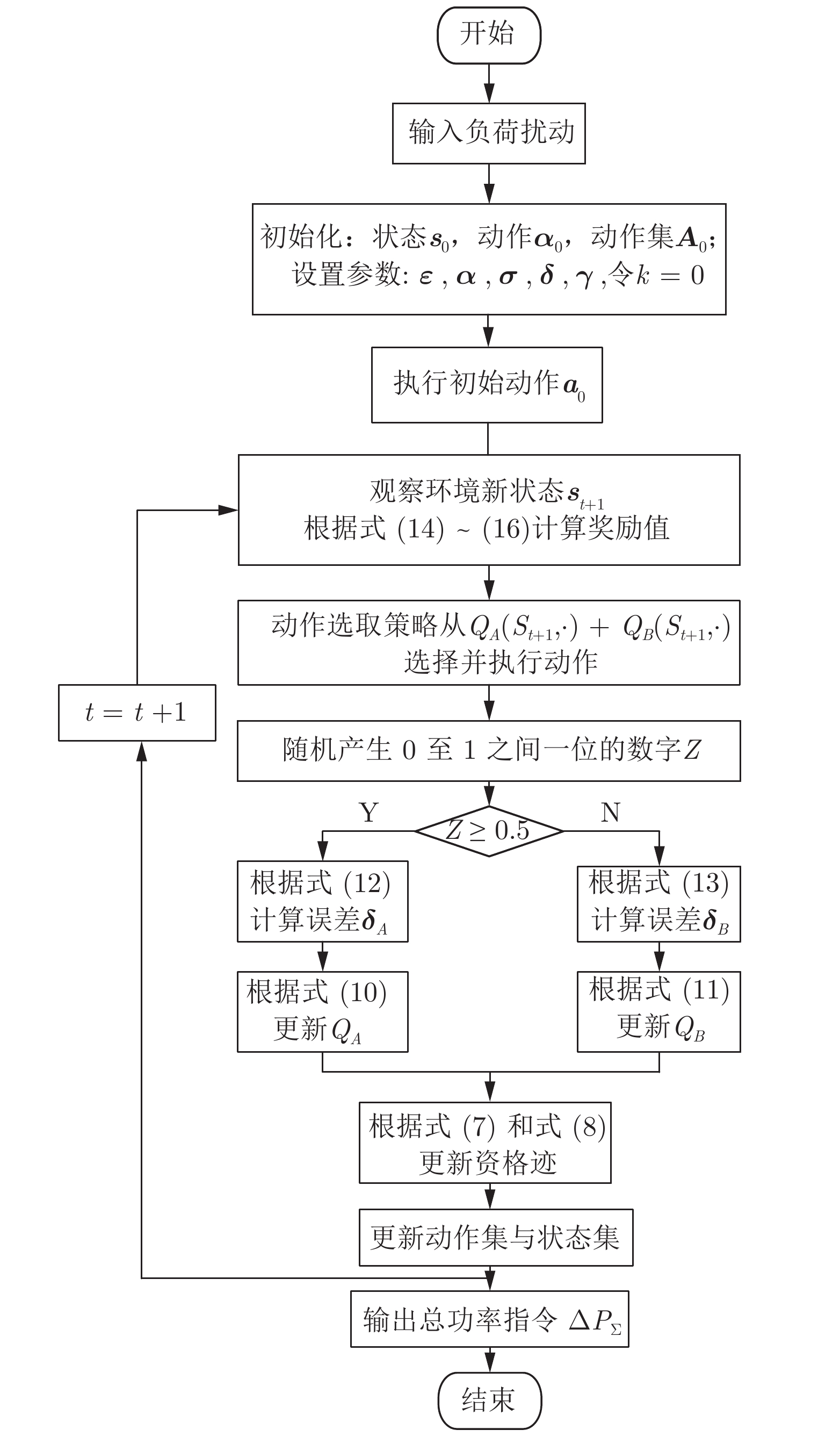
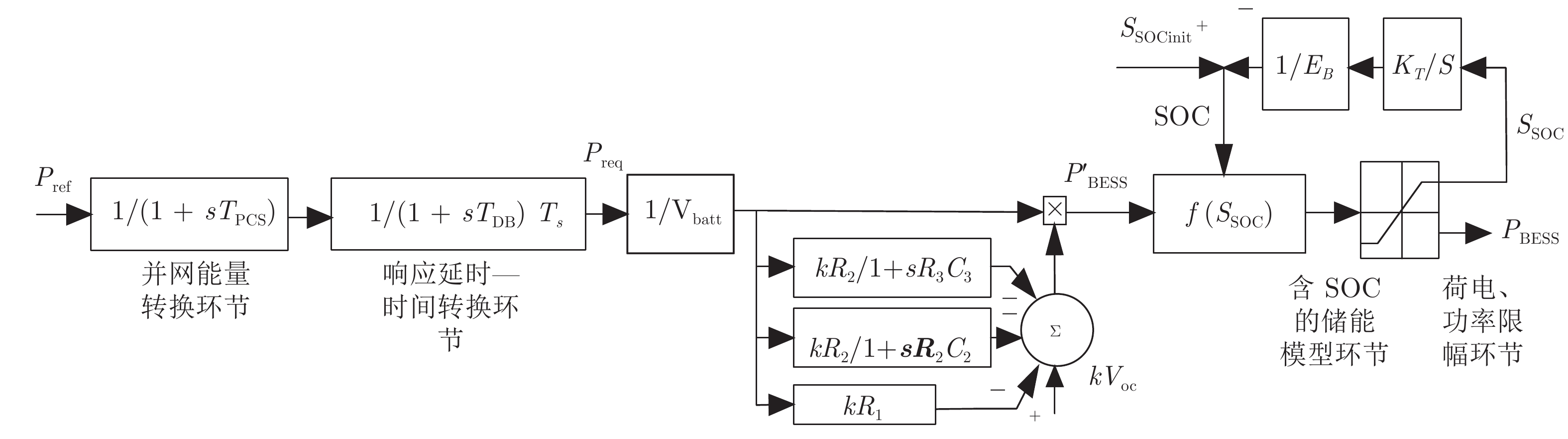
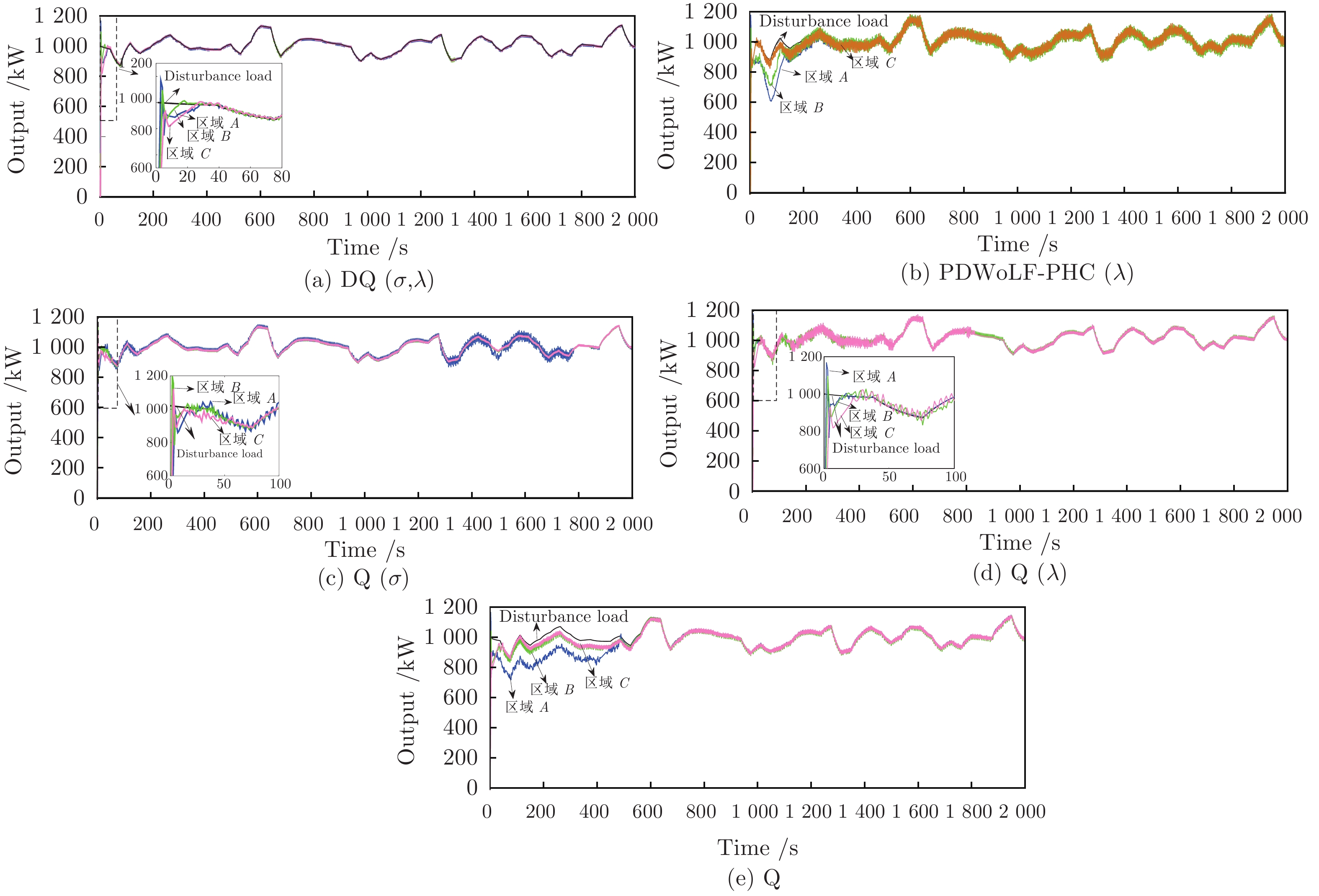
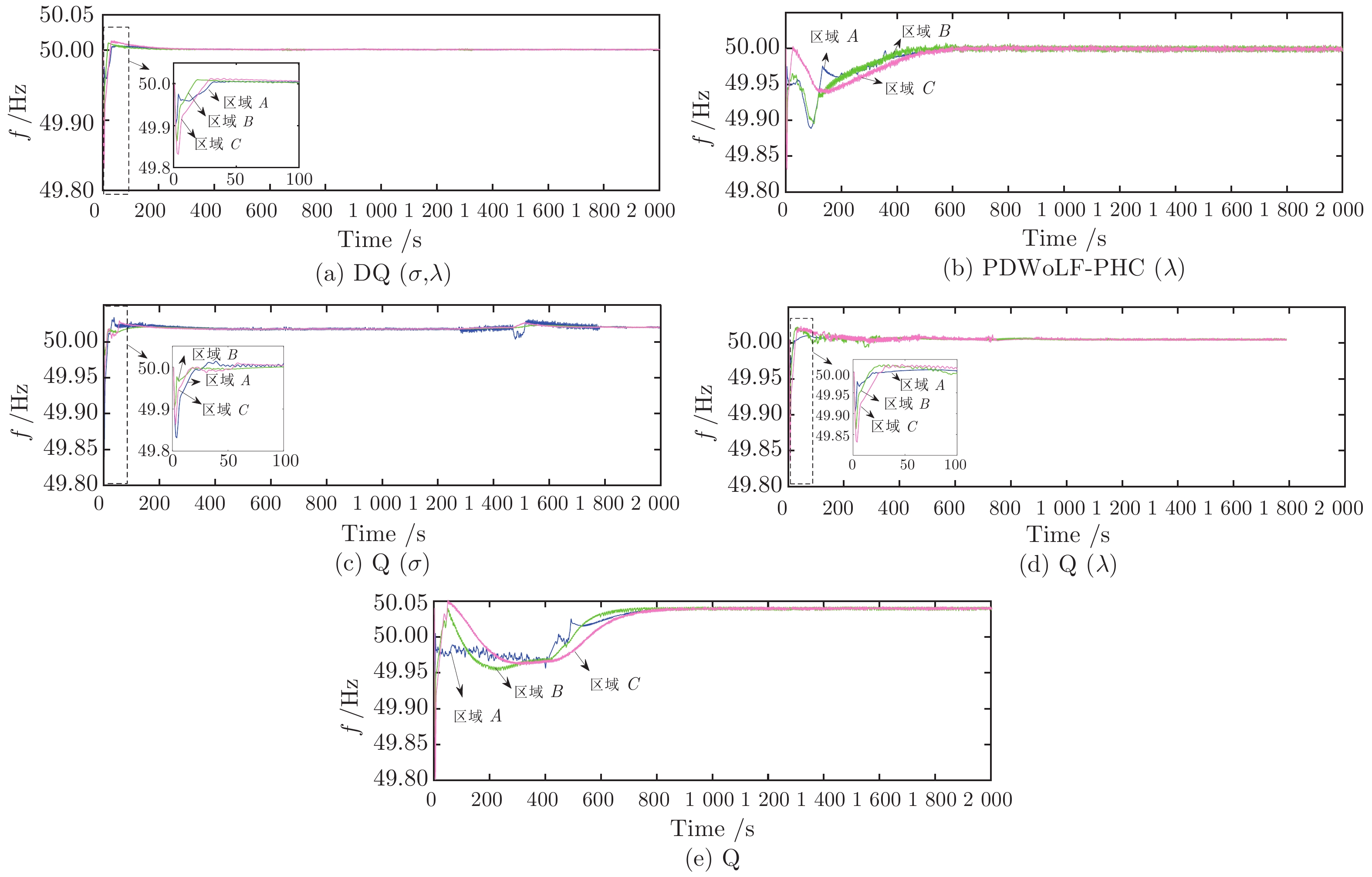
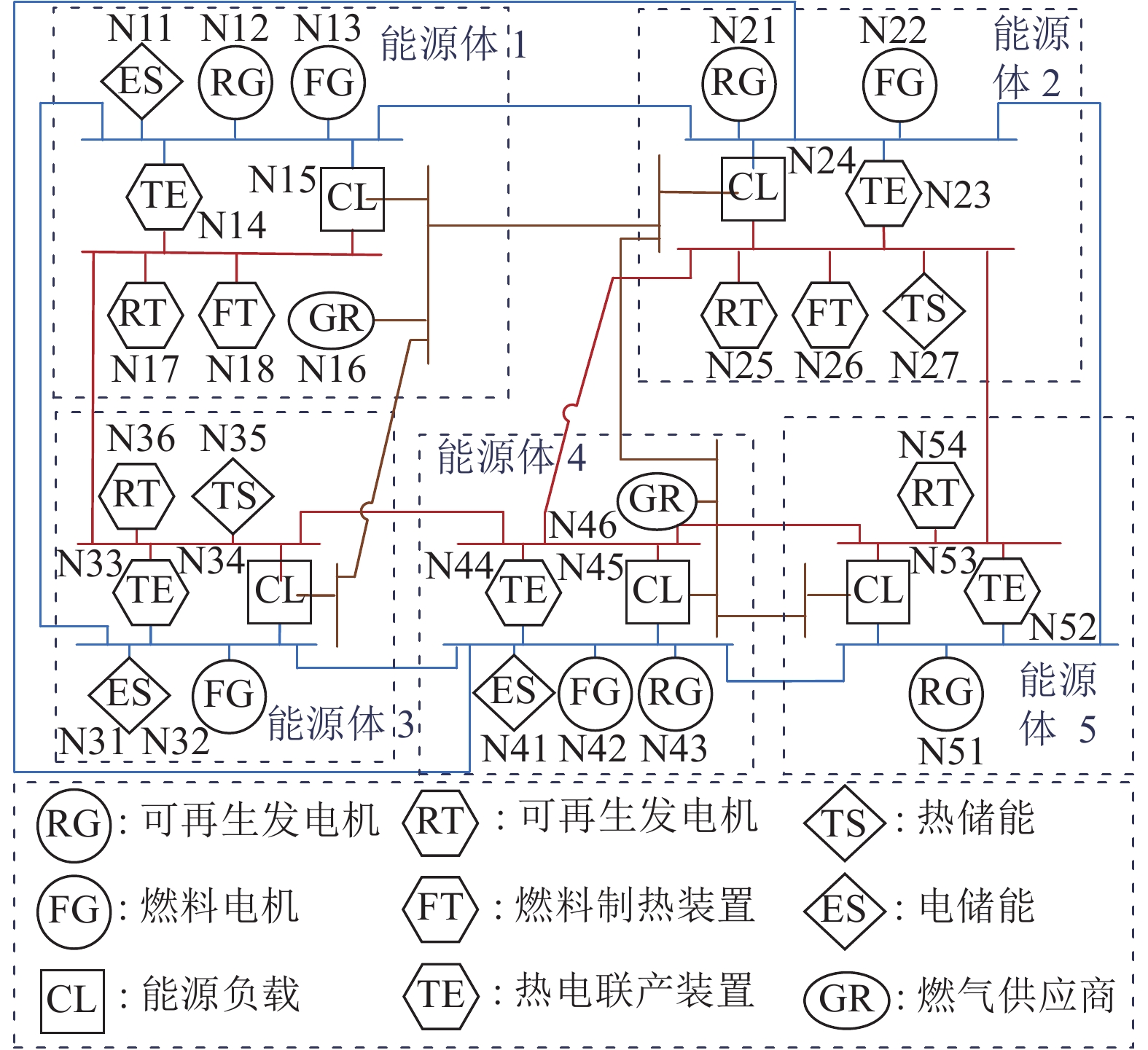
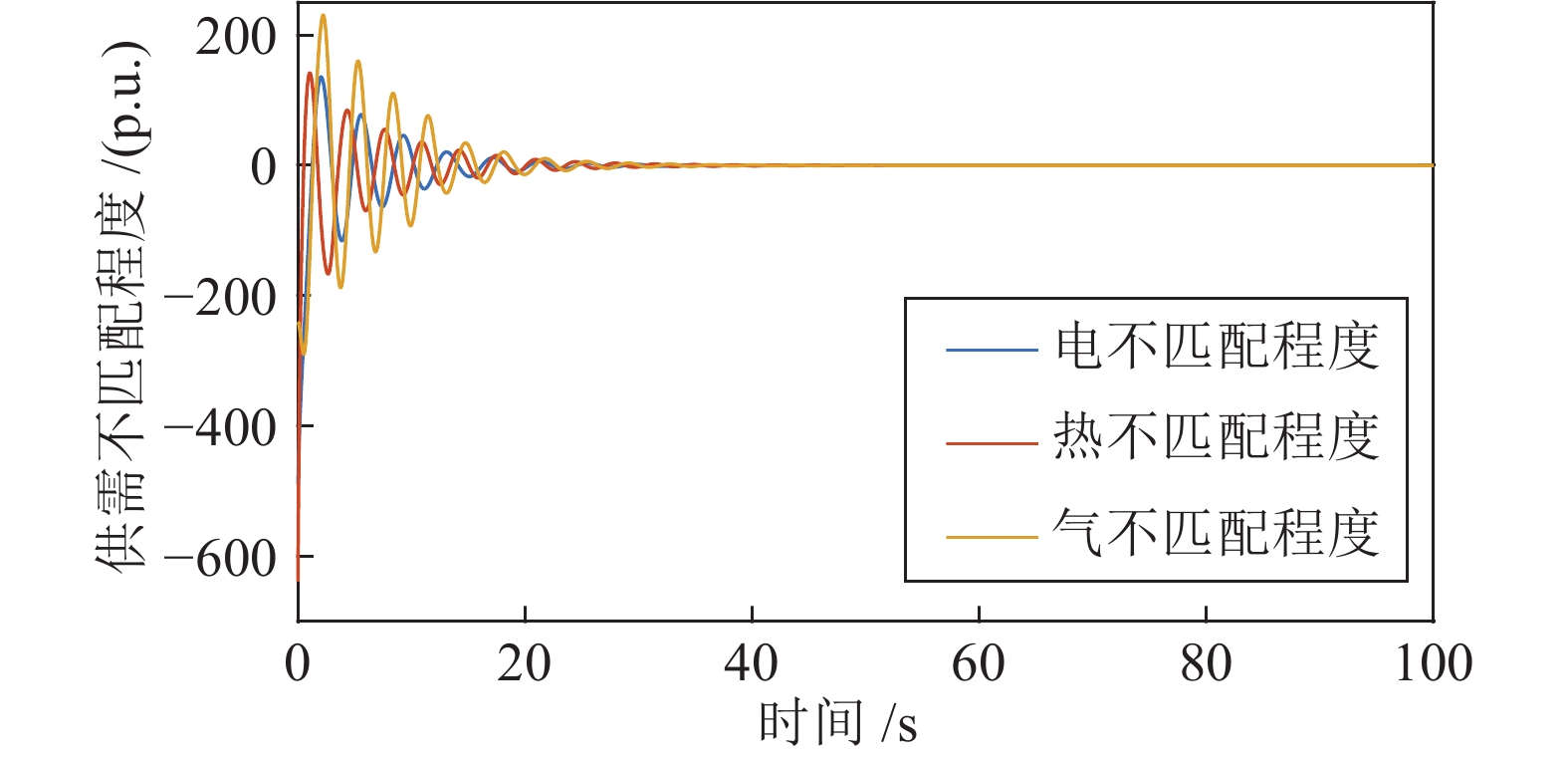
综合能源多区域协同是电网发展趋势, 而核心问题是采用何种方法对多区域进行协同. 本文基于Q ( \begin{document}$\sigma $\end{document} ![]()
![]()
)融入了资格迹及双重Q学习, 提出一种面向多区域多能微网群的多智能体协同控制算法, 即DQ ( \begin{document}$\sigma ,\lambda $\end{document} ![]()
![]()
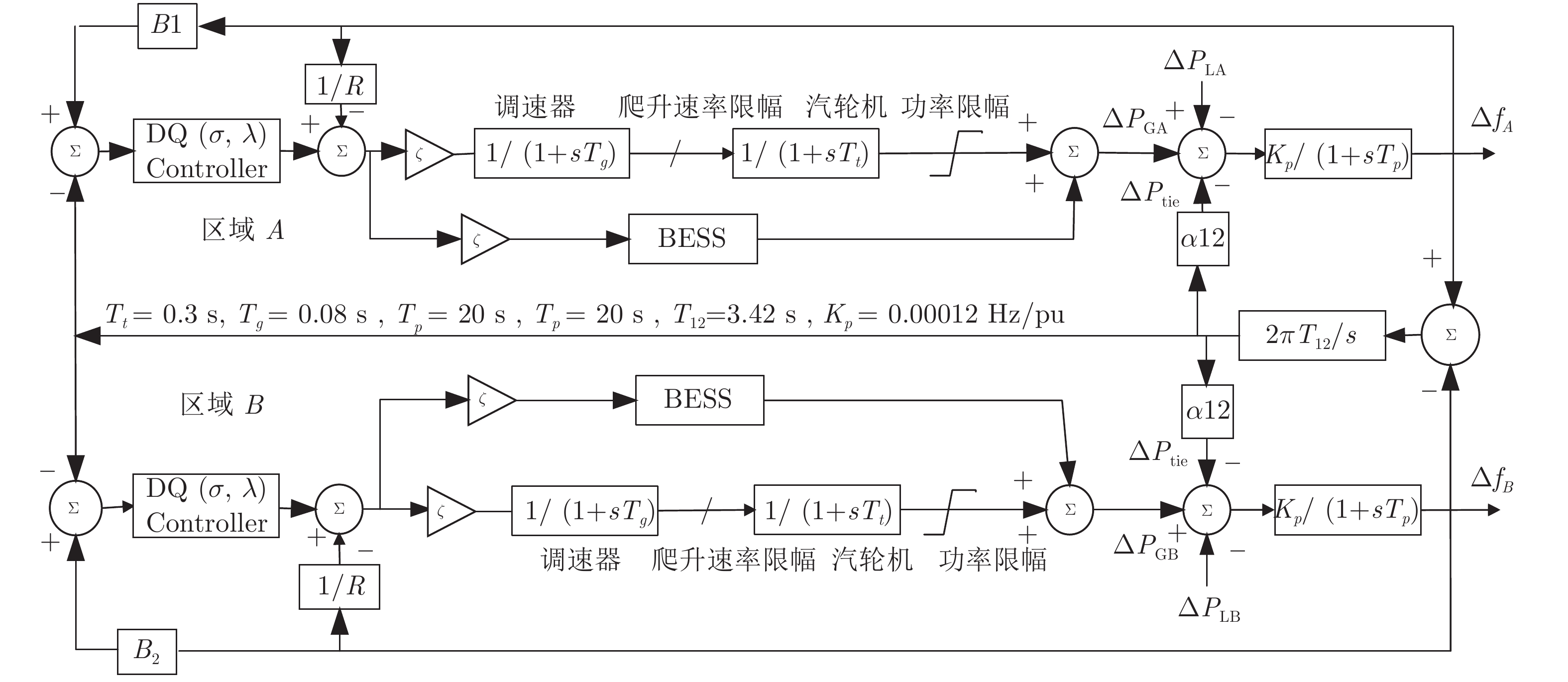
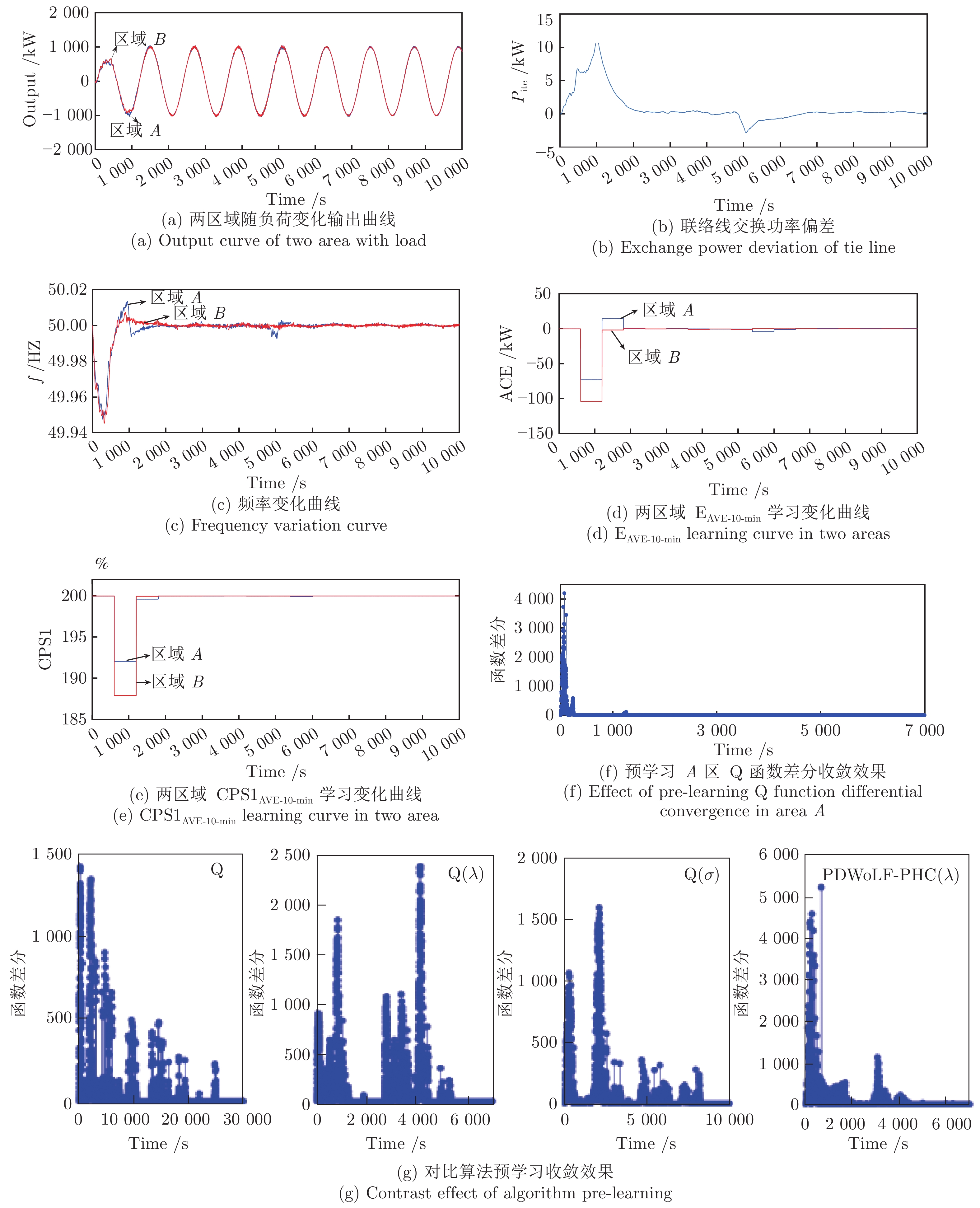
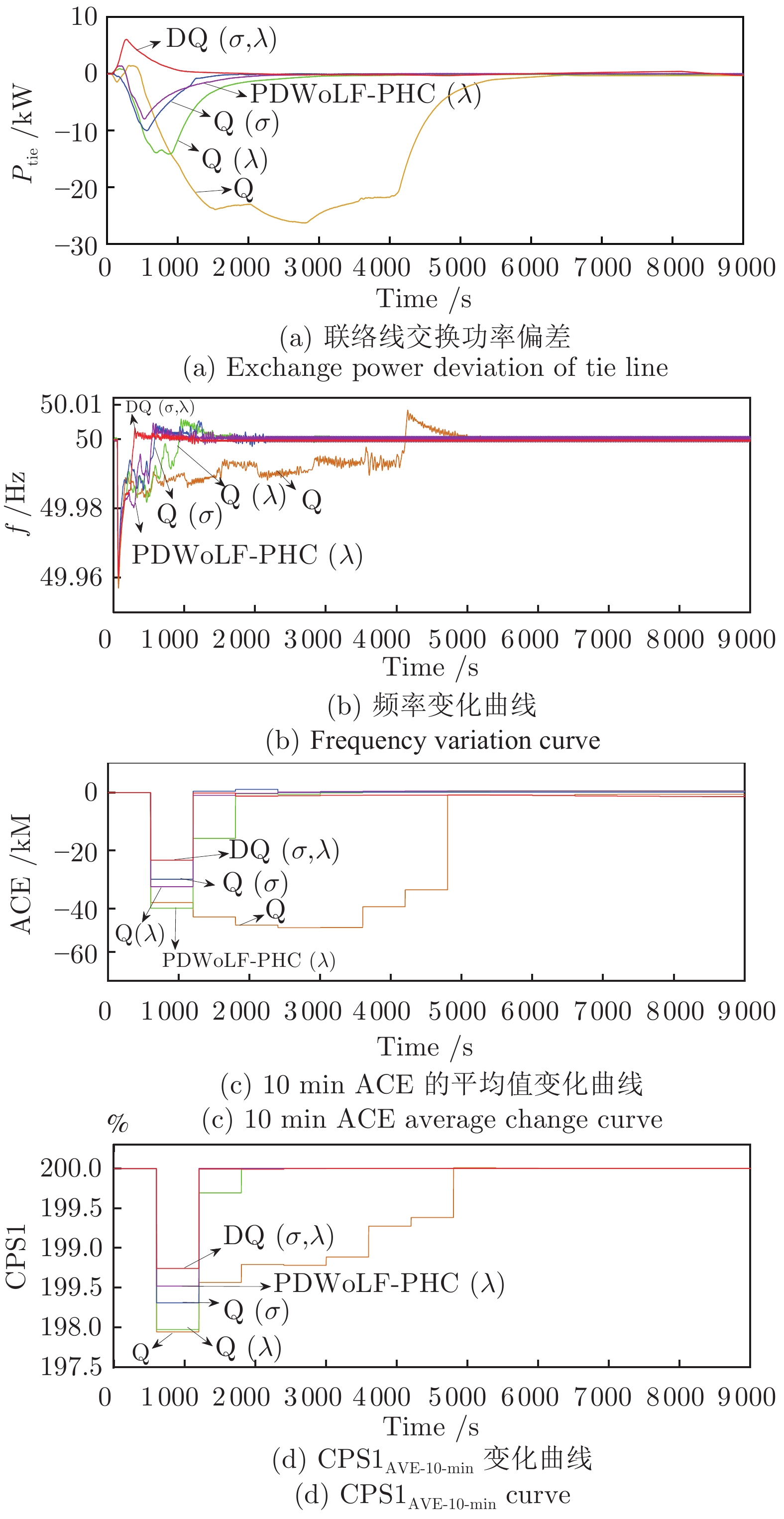
), 避免传统强化学习动作探索值高估的同时, 来获取分布式多区域的协同. 通过对改进的IEEE两区域负荷频率控制模型及三区域多能微网群自动发电控制(Automatic generation control, AGC)模型仿真, 结果表明, 与传统方法相比, 所提算法具有快速收敛性和更优动态性能, 能获得分布式多区域多能微网群的协同.
综合能源多区域协同是电网发展趋势, 而核心问题是采用何种方法对多区域进行协同. 本文基于Q (



2020, 46(9): 1831-1843.
doi: 10.16383/j.aas.c200172
cstr: 32138.14.j.aas.c200172
摘要:
研究综合能源系统的协同能源管理问题, 并提出了一种基于异步动态事件触发通信策略的分布式梯度算法来解决该问题. 通过引入外部辅助变量并设计有效的触发机制, 该方法可以使得每个参与者仅在必要时刻以离散且异步的方式与邻居产生通信交互, 实现了连续通信的离散替代化. 同时, 该方法并不要求全局同步时钟, 具有更强的灵活性. 此外, 本文也在理论上证明了算法的全局收敛性. 最后, 仿真结果验证了所提方法的有效性.
研究综合能源系统的协同能源管理问题, 并提出了一种基于异步动态事件触发通信策略的分布式梯度算法来解决该问题. 通过引入外部辅助变量并设计有效的触发机制, 该方法可以使得每个参与者仅在必要时刻以离散且异步的方式与邻居产生通信交互, 实现了连续通信的离散替代化. 同时, 该方法并不要求全局同步时钟, 具有更强的灵活性. 此外, 本文也在理论上证明了算法的全局收敛性. 最后, 仿真结果验证了所提方法的有效性.
2020, 46(9): 1844-1868.
doi: 10.16383/j.aas.c190581
cstr: 32138.14.j.aas.c190581
摘要:
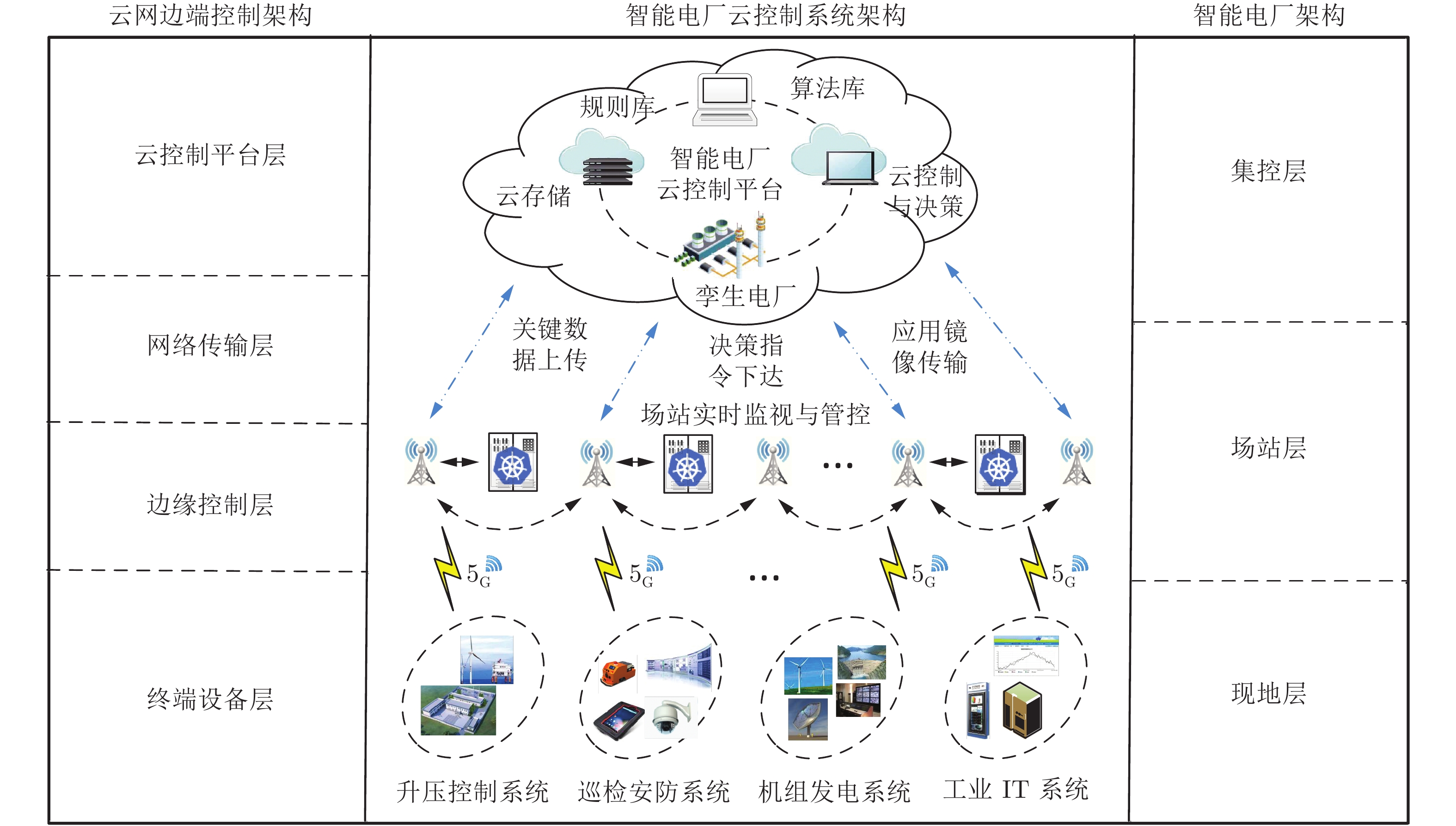
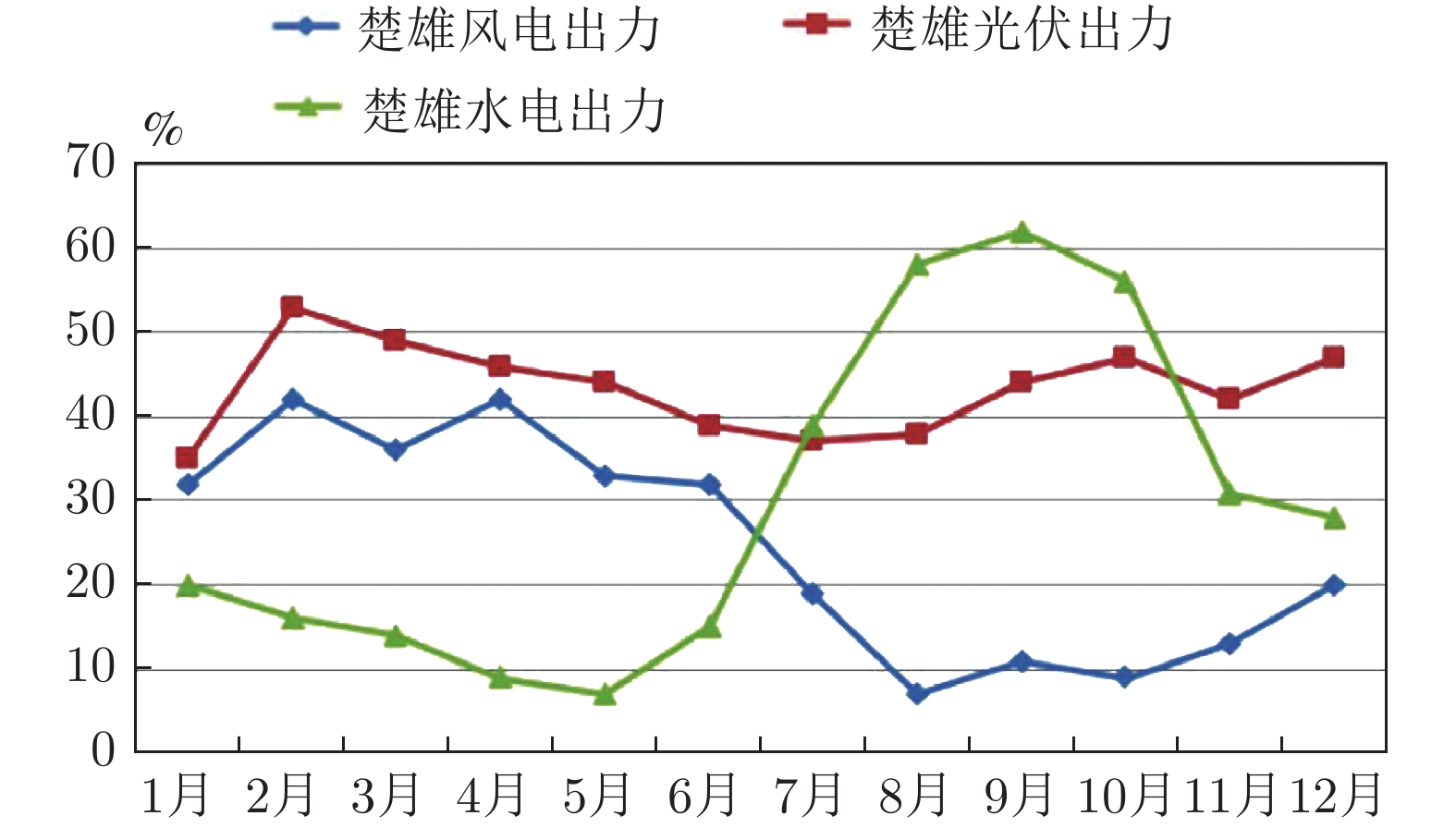
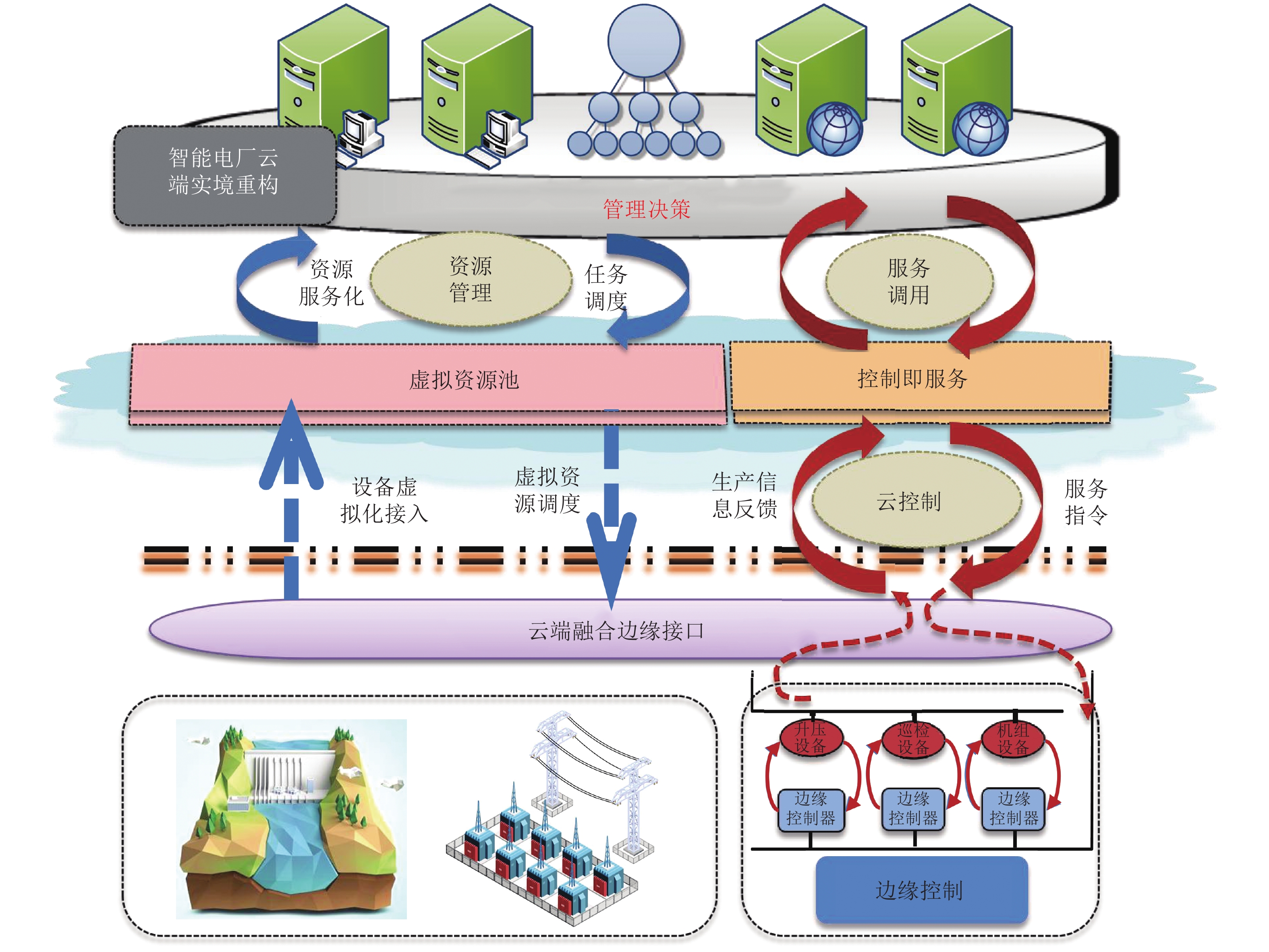
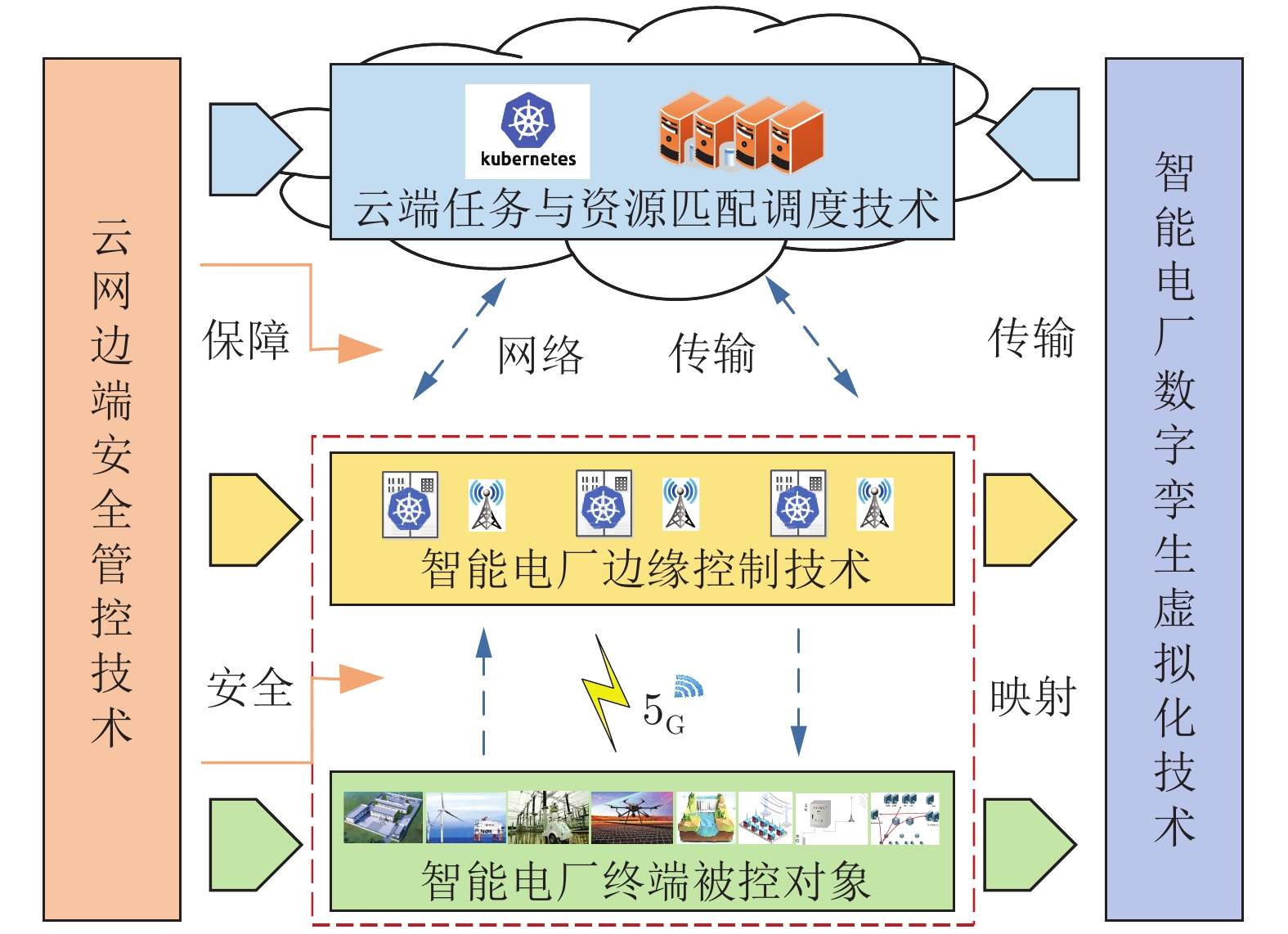
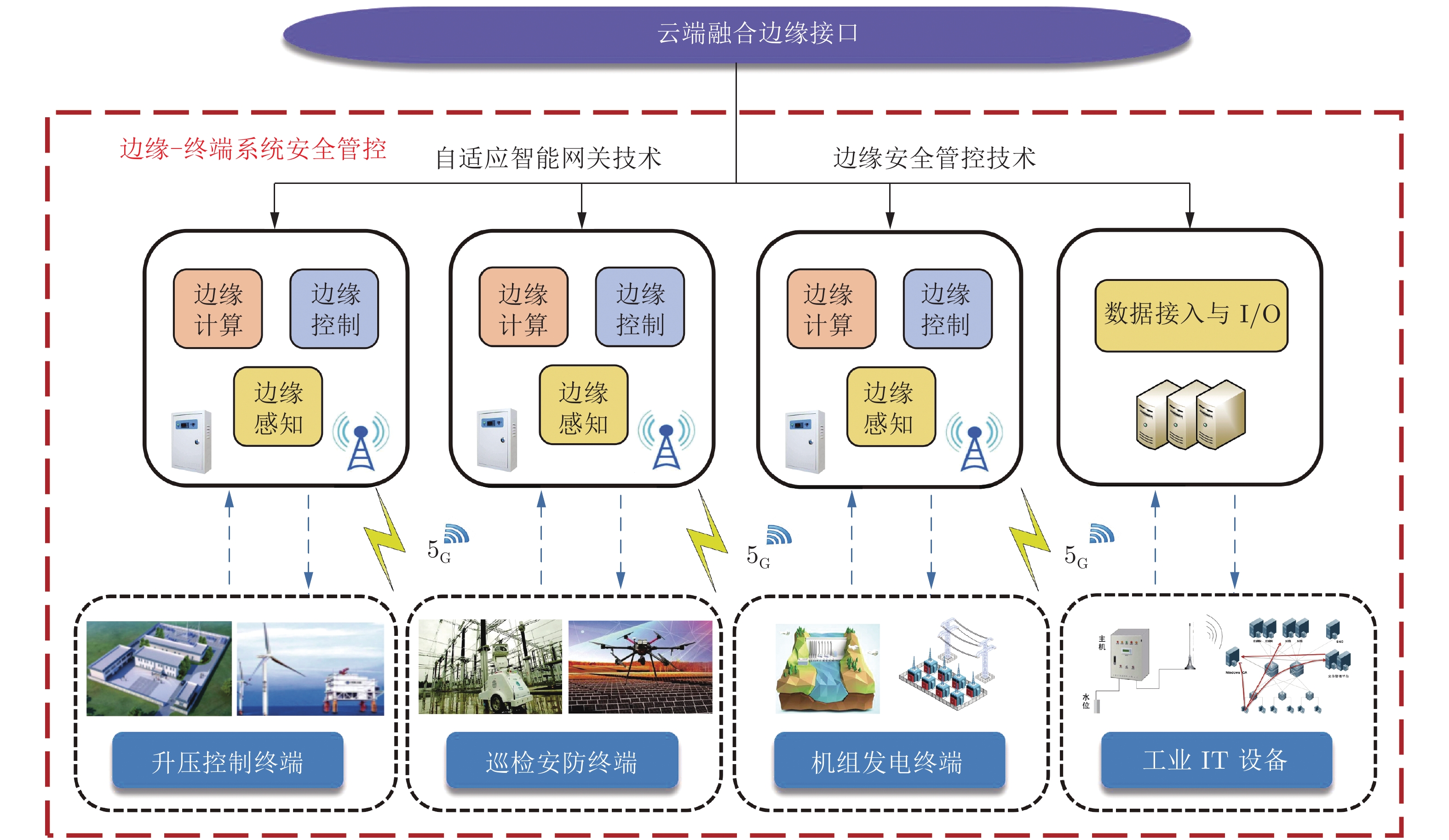
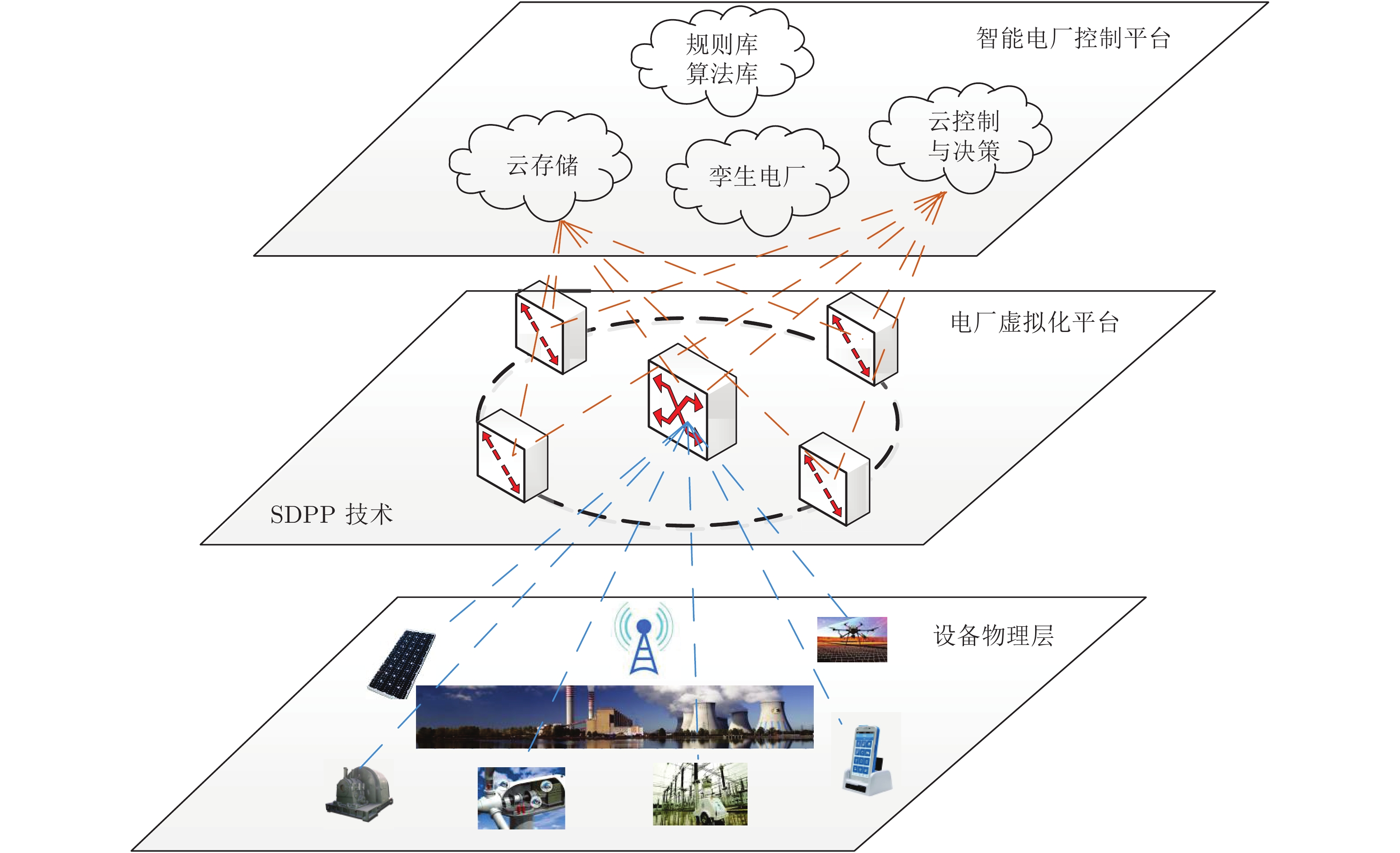
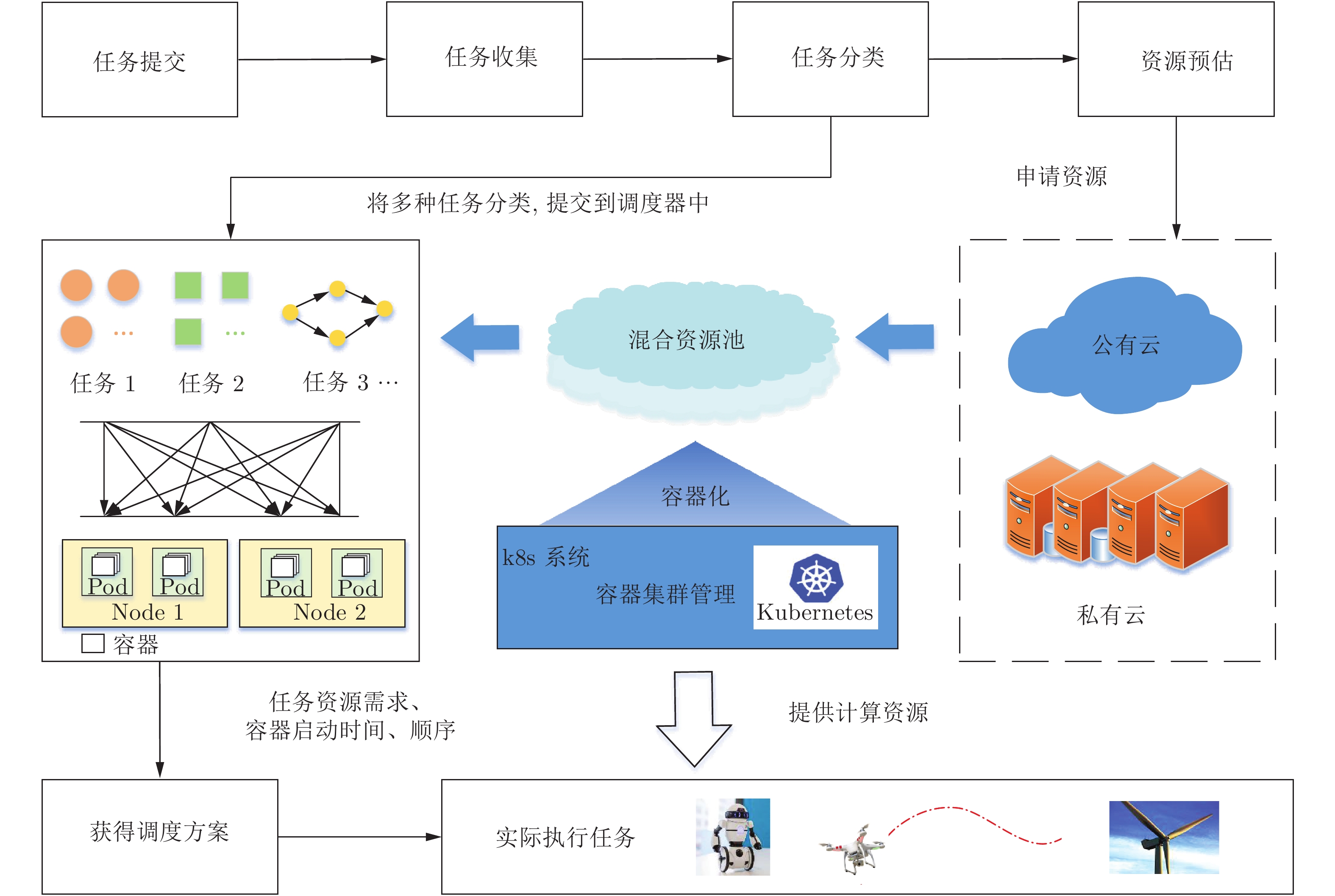
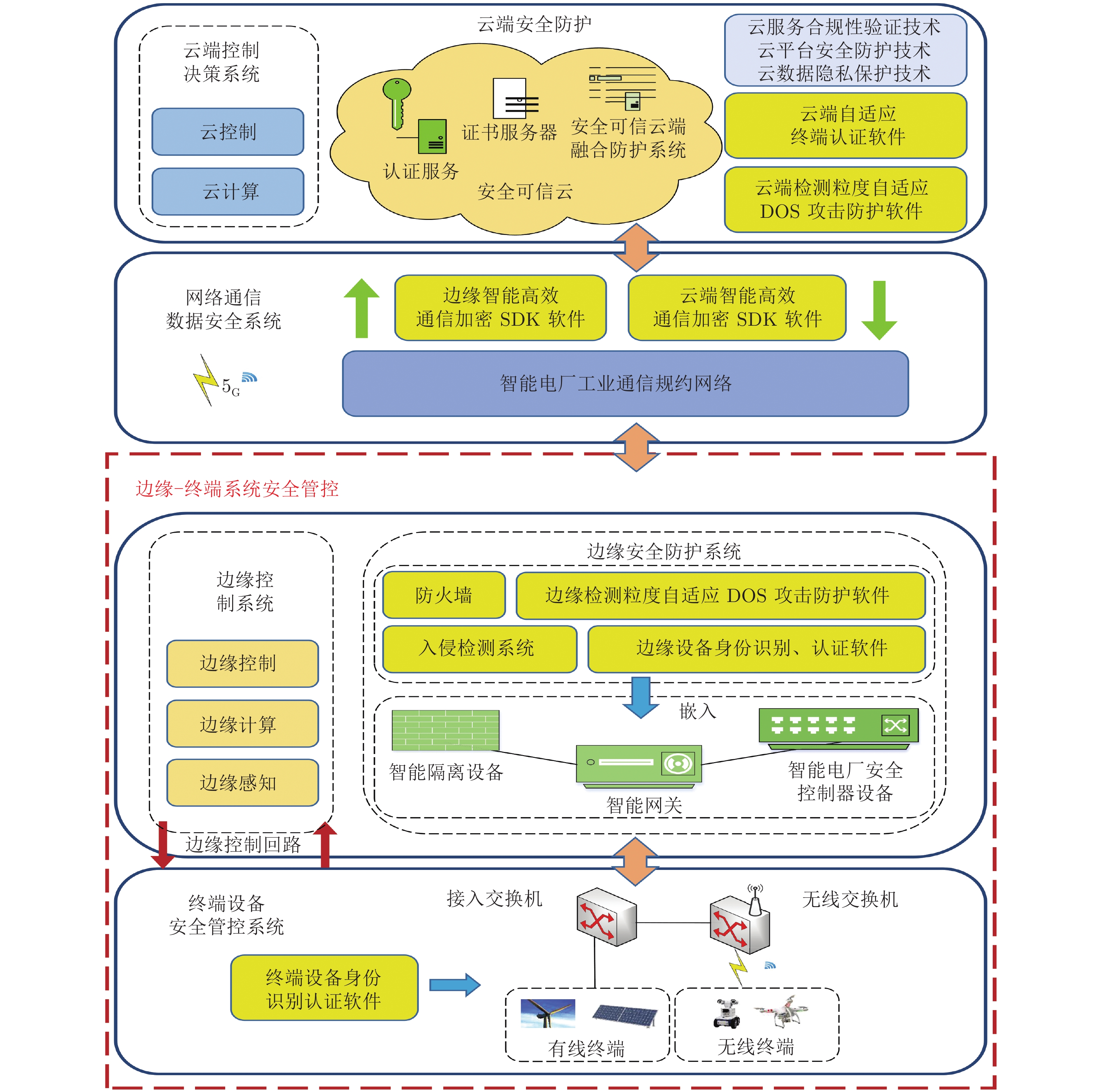
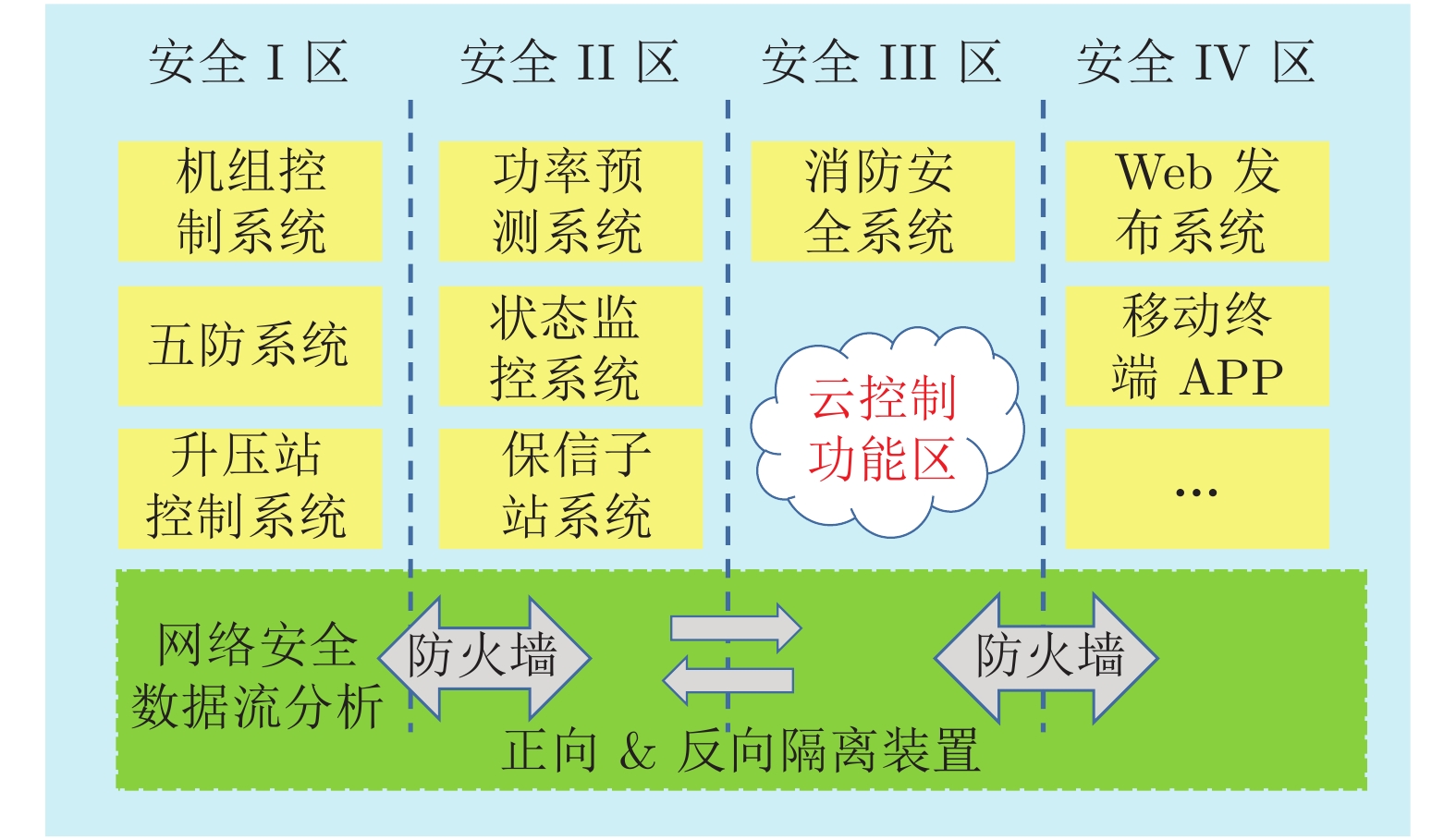
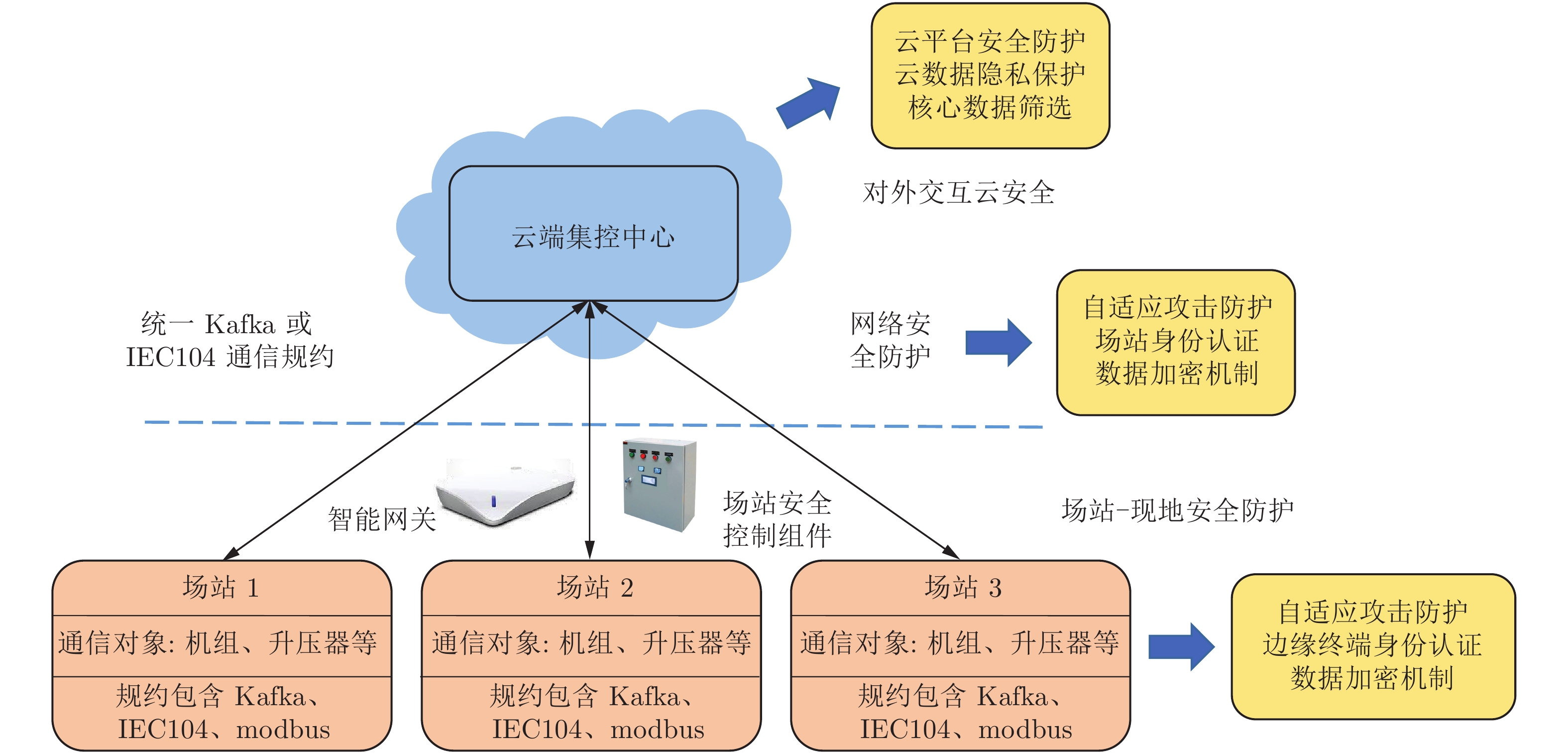
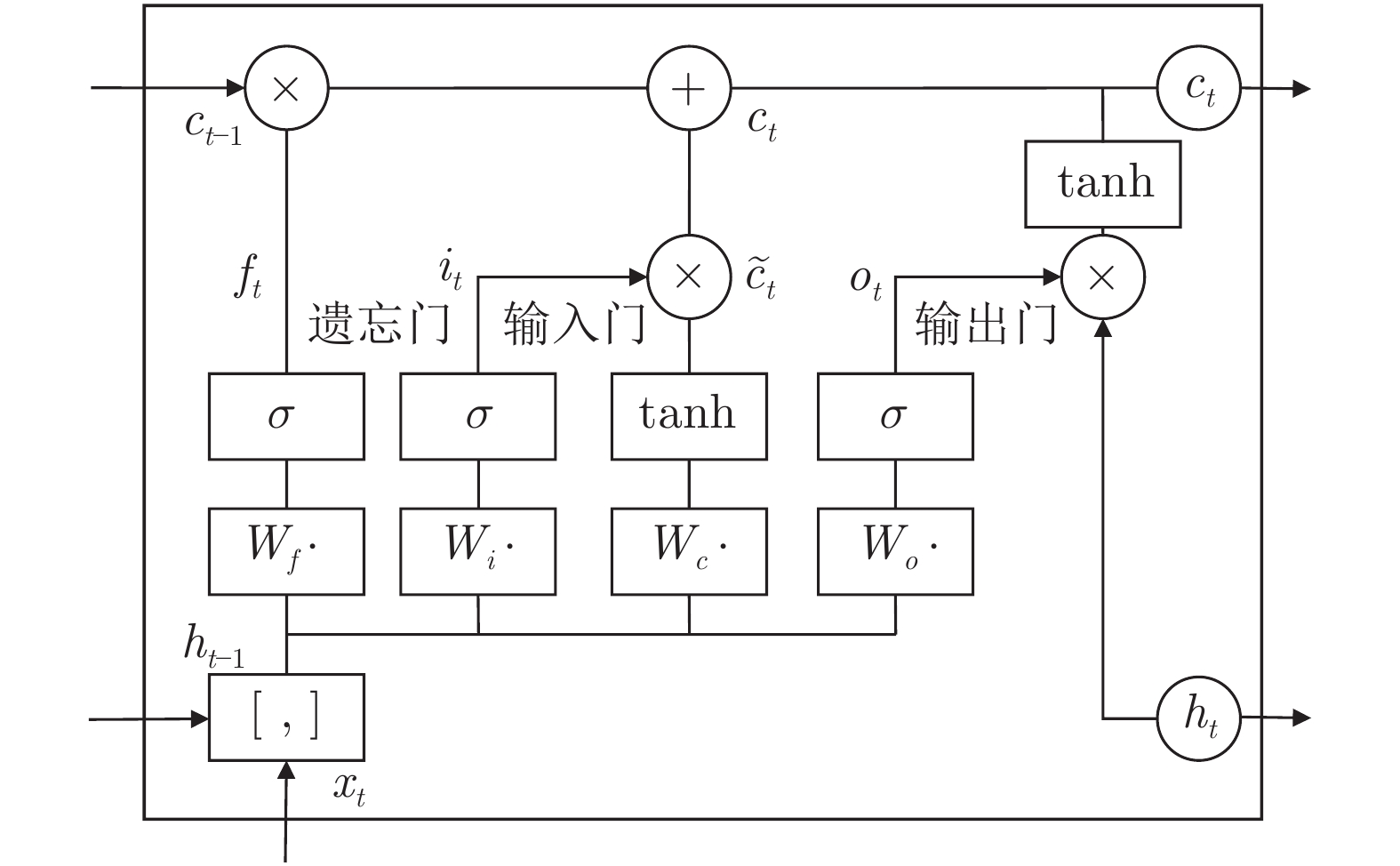
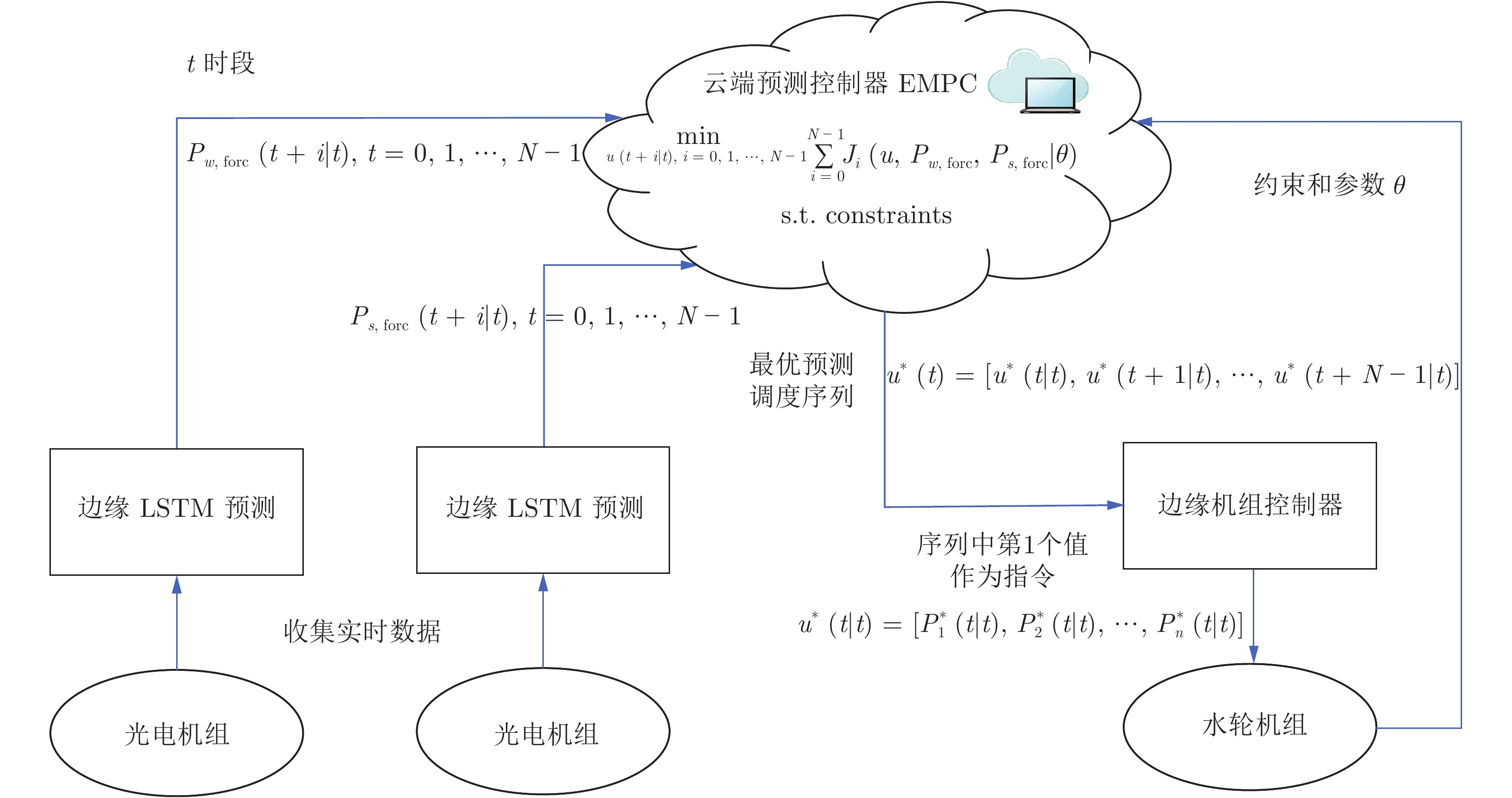
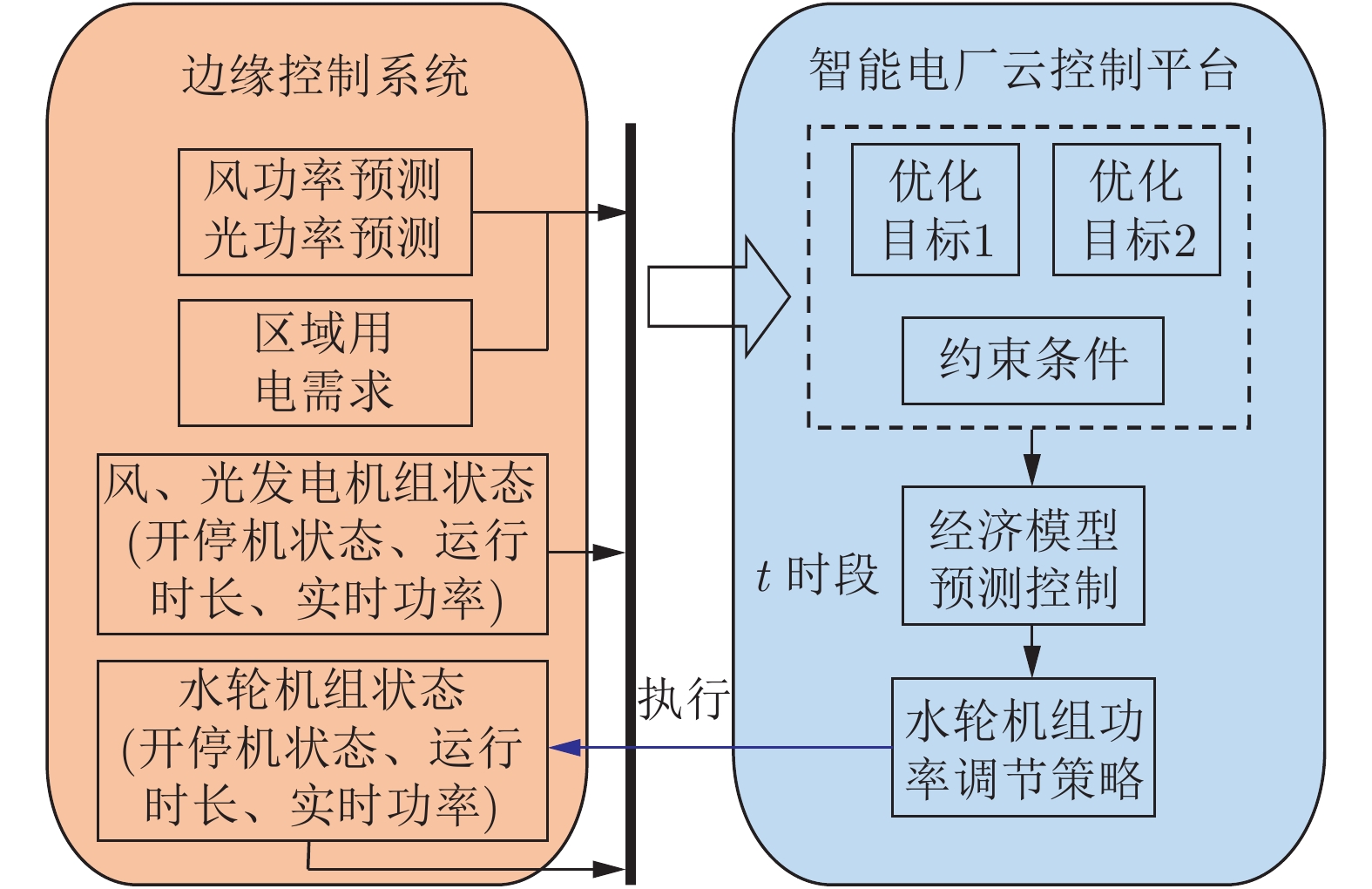
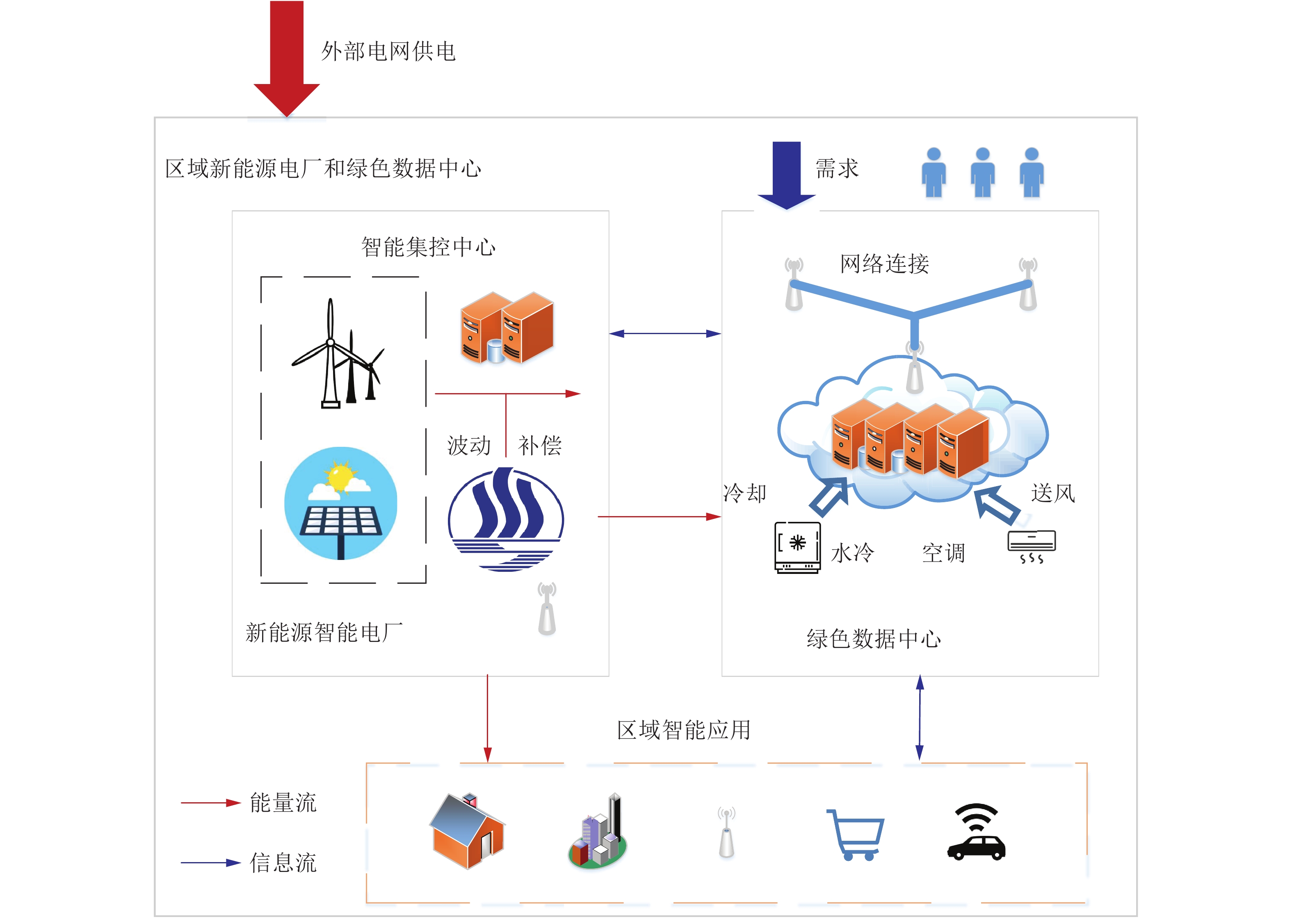
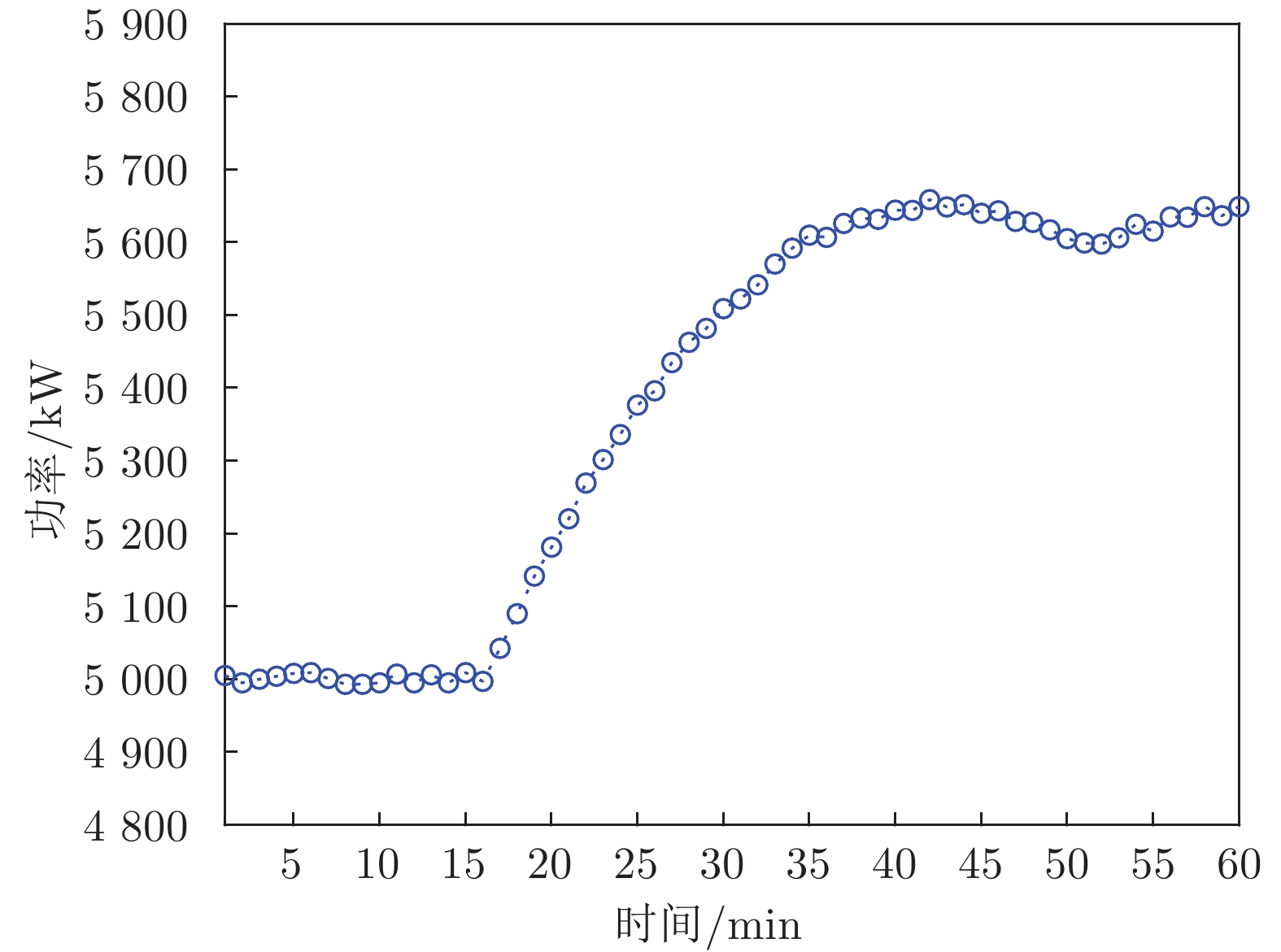
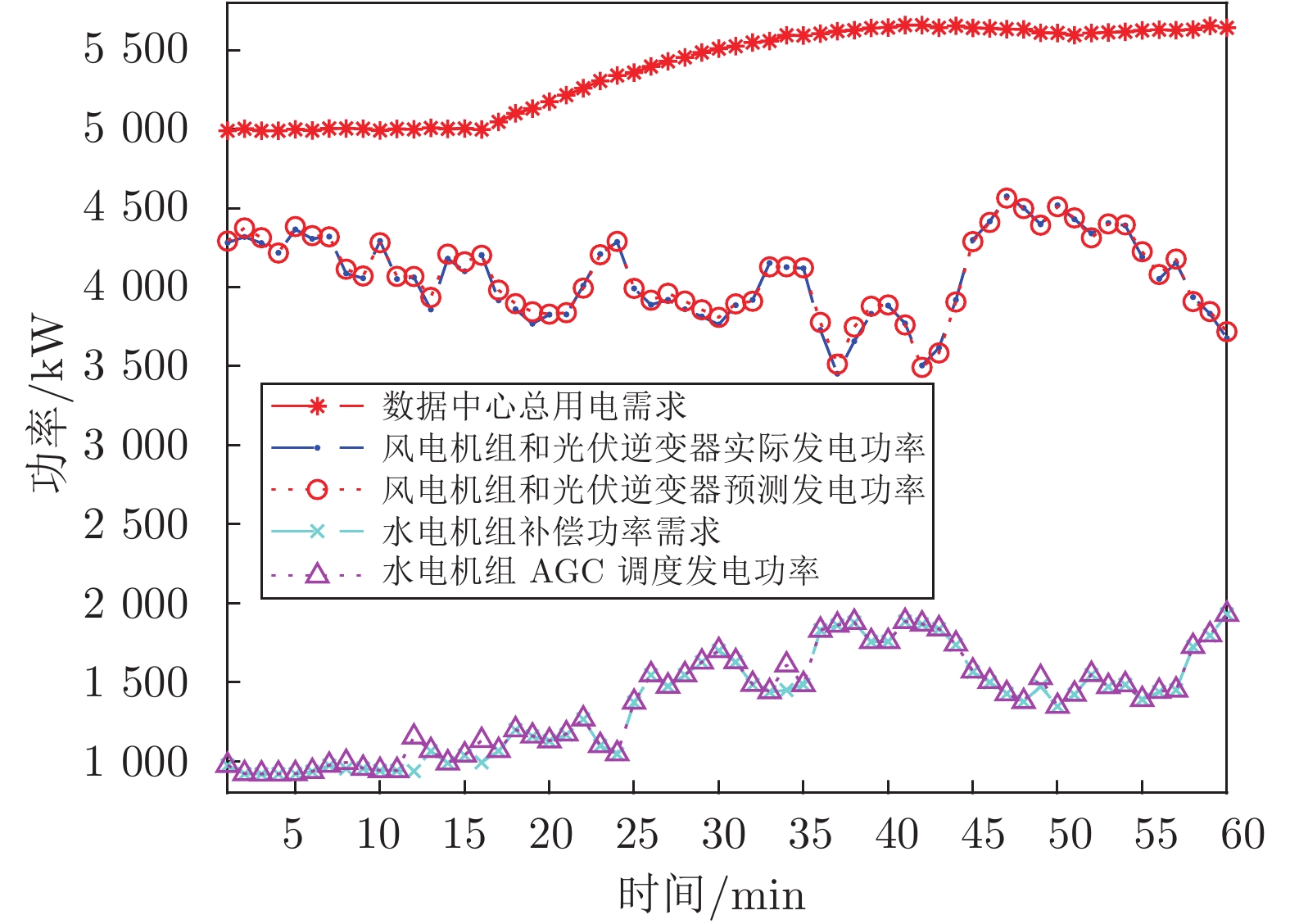
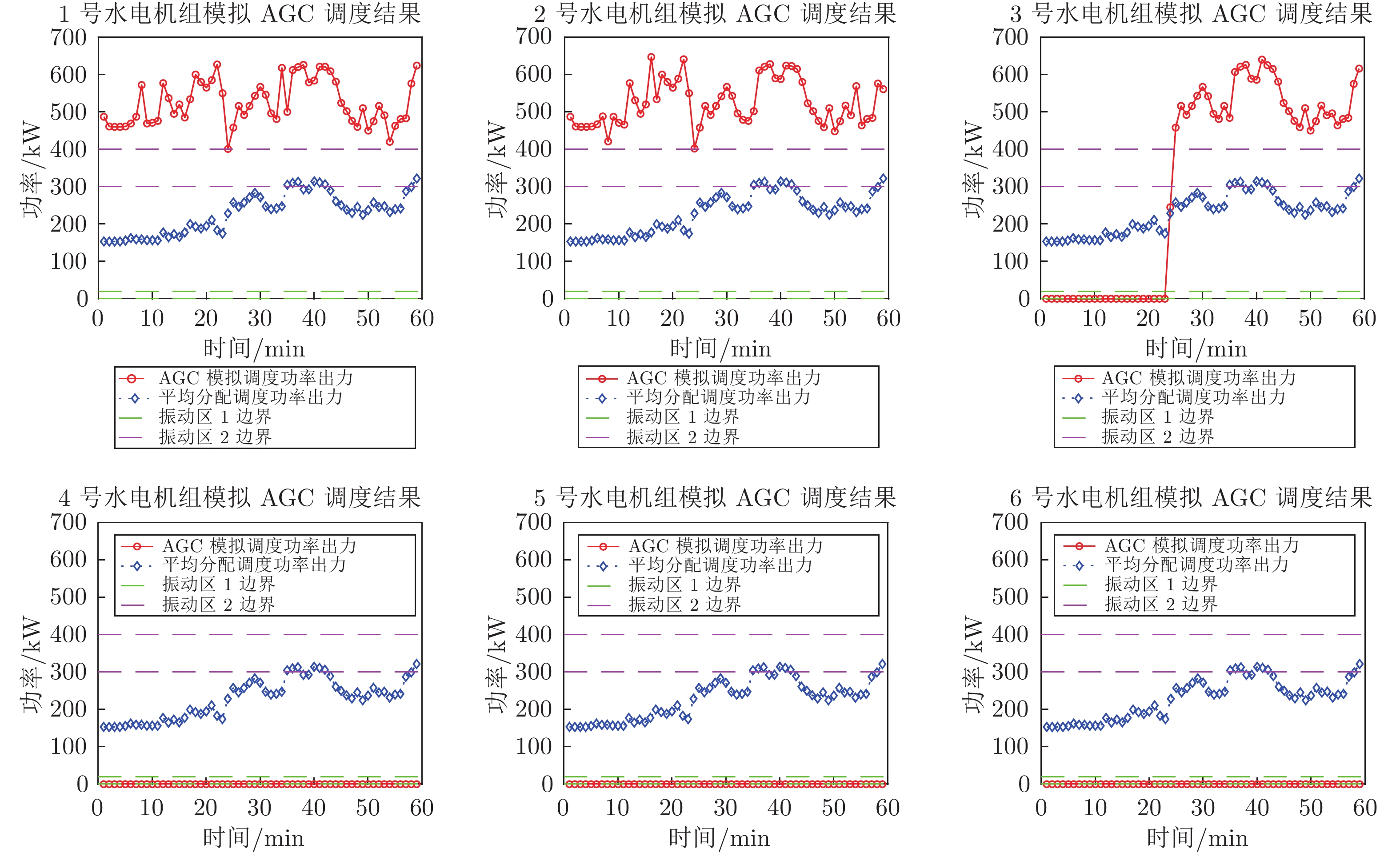
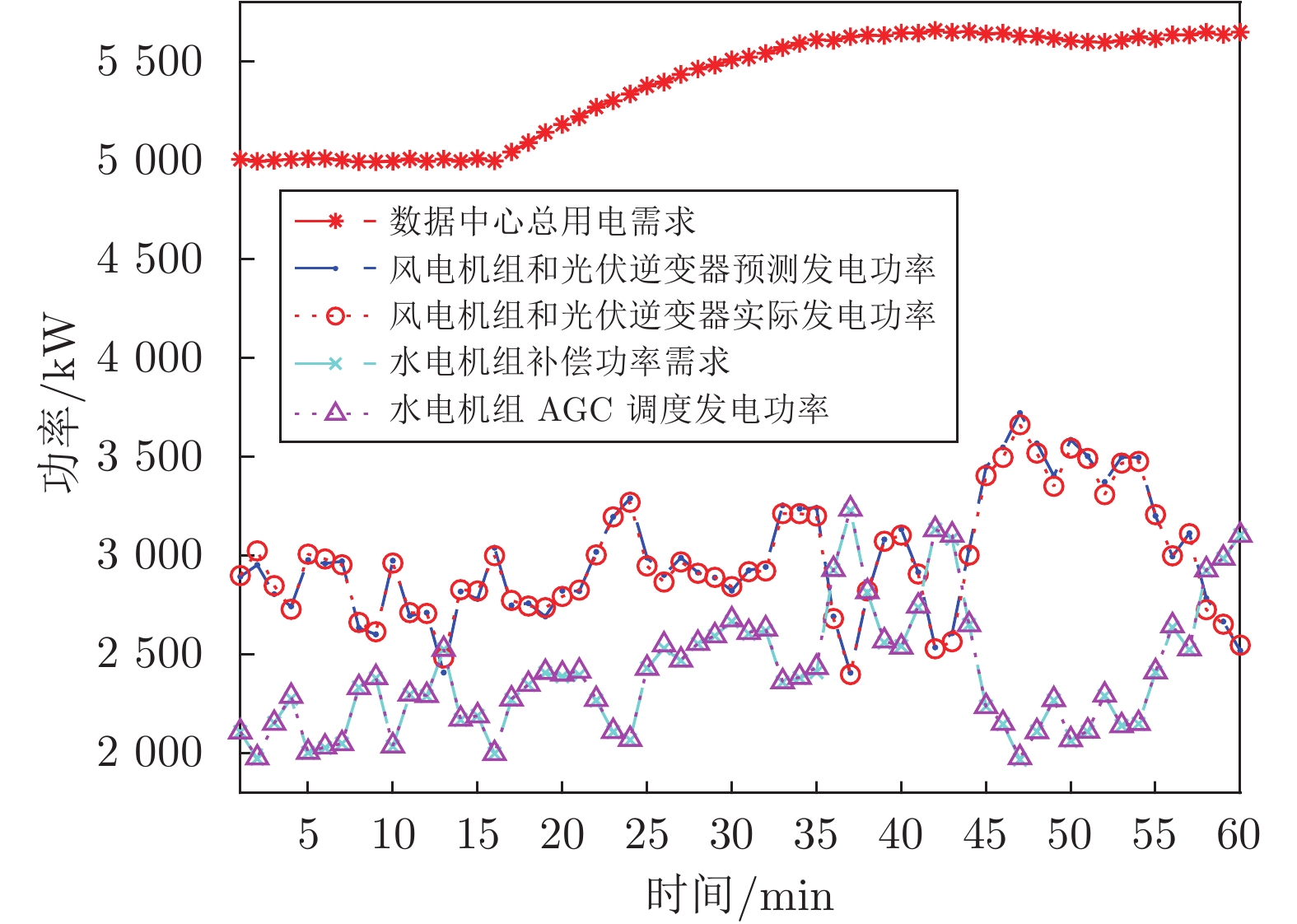
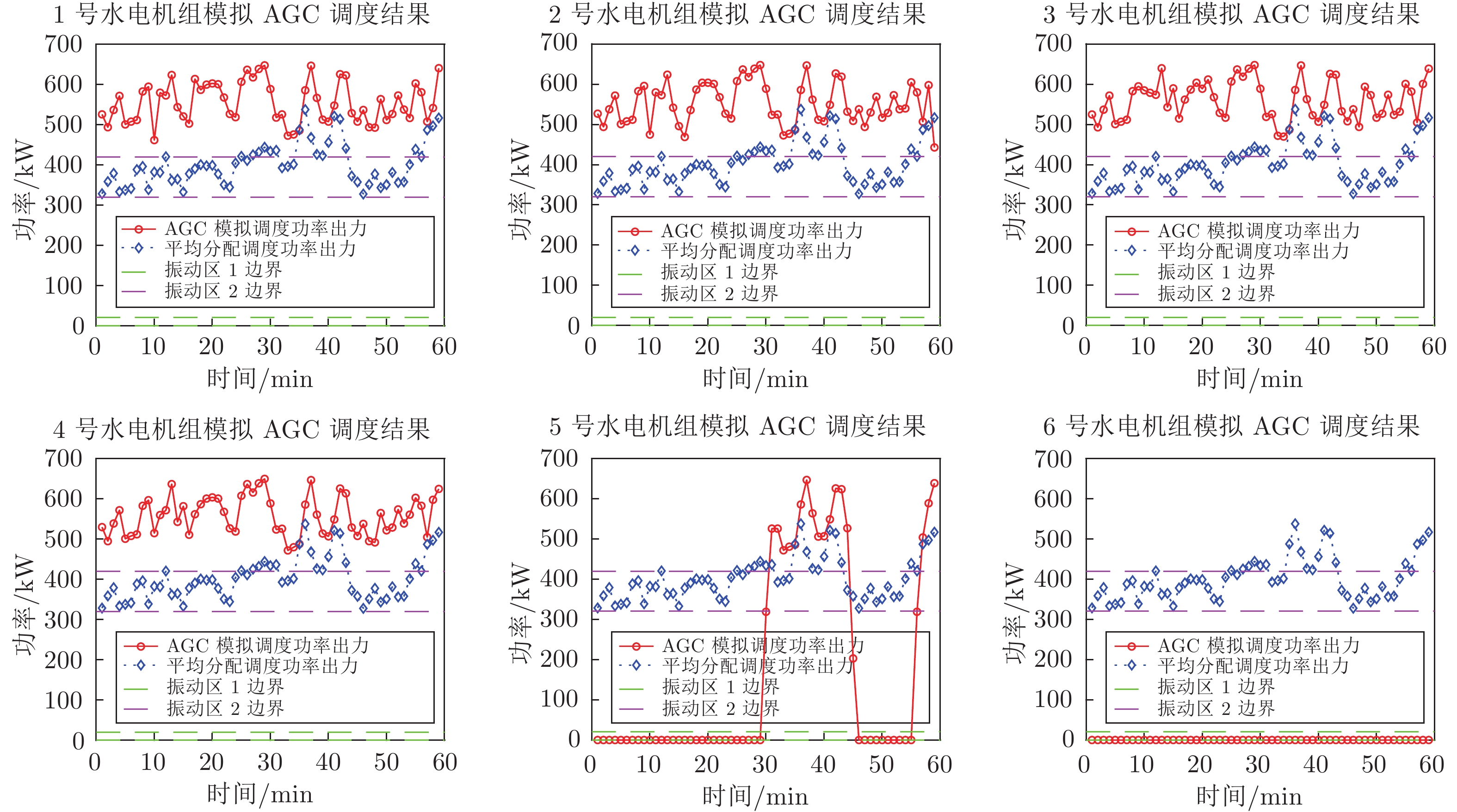
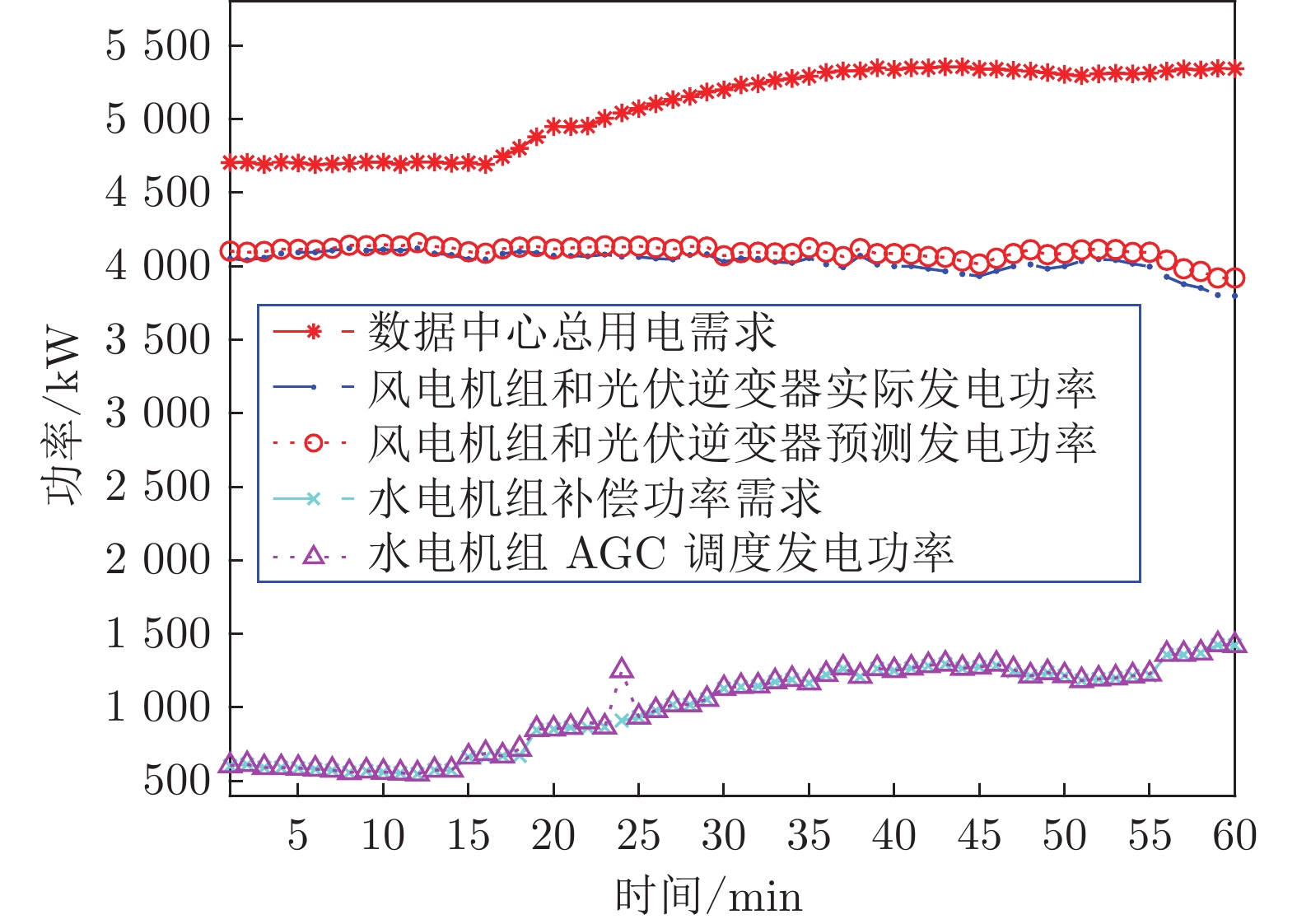
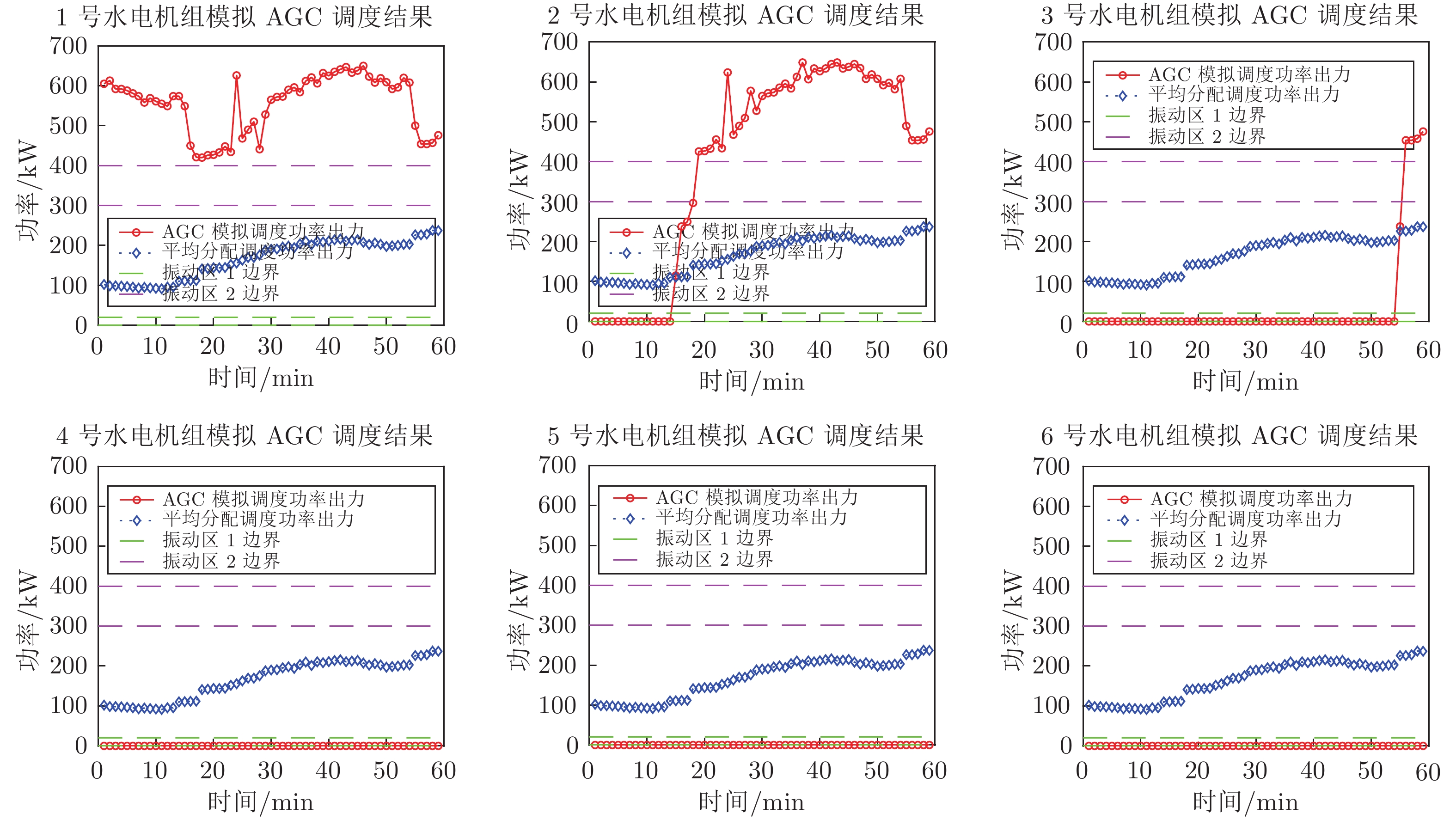
针对现代电力系统中设施庞杂、多源异构海量数据难以有效处理、“信息孤岛”长期存在以及整体优化调度管理能力不足等问题, 基于云控制系统理论, 以智能电厂为研究对象, 本文提出了智能电厂云控制系统(Intelligent power plant cloud control system, IPPCCS)解决方案. 基于智能电厂云控制系统, 针对绿色能源发电波动性强、抗扰能力差的问题, 利用机器学习算法对采集到的风电、光伏输出功率进行短时预测, 获知未来风、光机组功率输出情况. 在云端使用经济模型预测控制(Economic model predictive control, EMPC)算法, 通过实时滚动优化得到水轮机组的功率预测调度策略, 保证绿色能源互补发电的鲁棒性, 充分消纳风、光两种能源, 减少水轮机组启停和穿越振动区次数, 在为用户清洁、稳定供电的同时降低了机组寿命损耗. 最后, 一个区域云数据中心的供电算例表明了本文方法的有效性.
针对现代电力系统中设施庞杂、多源异构海量数据难以有效处理、“信息孤岛”长期存在以及整体优化调度管理能力不足等问题, 基于云控制系统理论, 以智能电厂为研究对象, 本文提出了智能电厂云控制系统(Intelligent power plant cloud control system, IPPCCS)解决方案. 基于智能电厂云控制系统, 针对绿色能源发电波动性强、抗扰能力差的问题, 利用机器学习算法对采集到的风电、光伏输出功率进行短时预测, 获知未来风、光机组功率输出情况. 在云端使用经济模型预测控制(Economic model predictive control, EMPC)算法, 通过实时滚动优化得到水轮机组的功率预测调度策略, 保证绿色能源互补发电的鲁棒性, 充分消纳风、光两种能源, 减少水轮机组启停和穿越振动区次数, 在为用户清洁、稳定供电的同时降低了机组寿命损耗. 最后, 一个区域云数据中心的供电算例表明了本文方法的有效性.


2020, 46(9): 1869-1884.
doi: 10.16383/j.aas.c190278
cstr: 32138.14.j.aas.c190278
摘要:
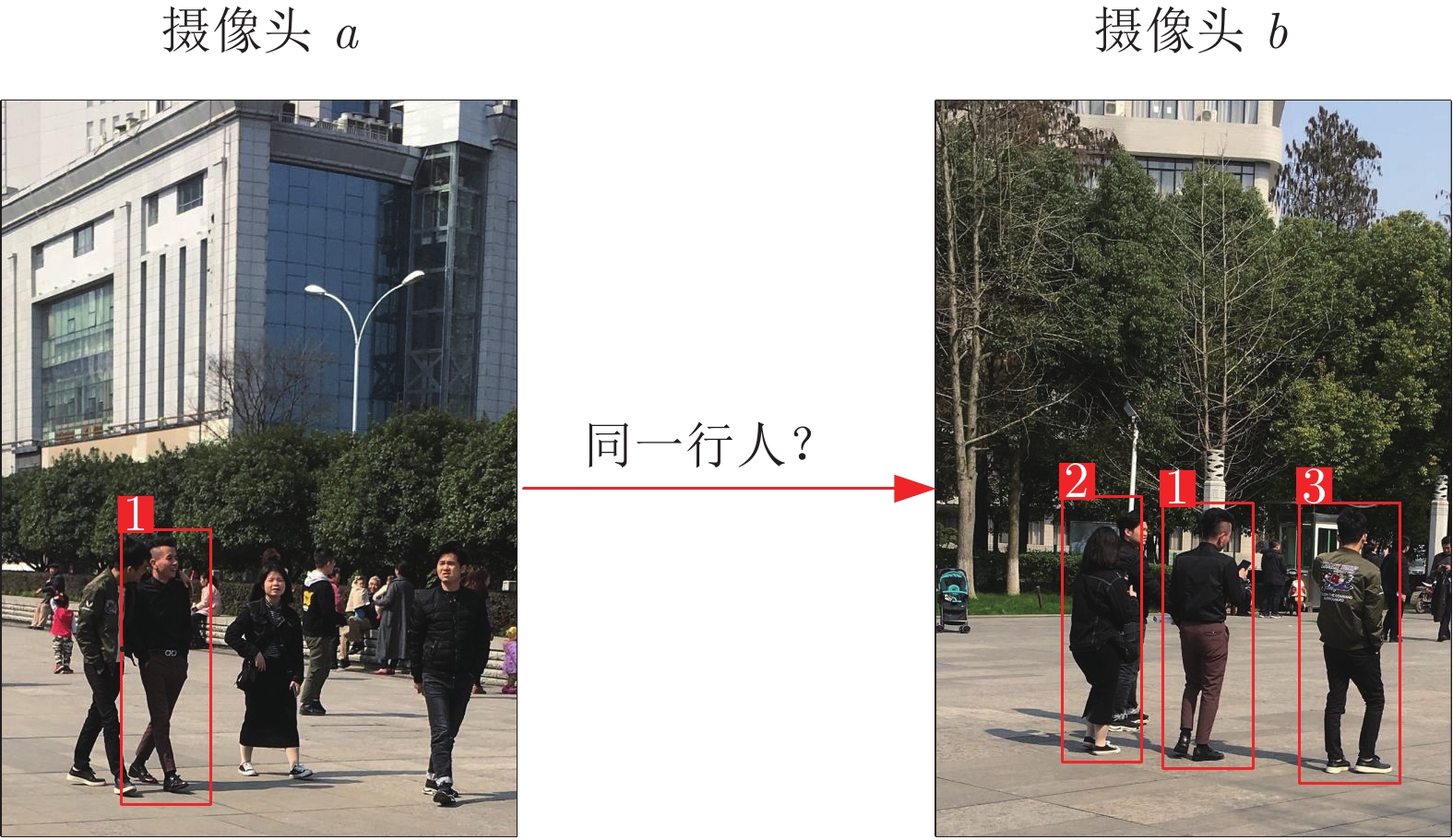
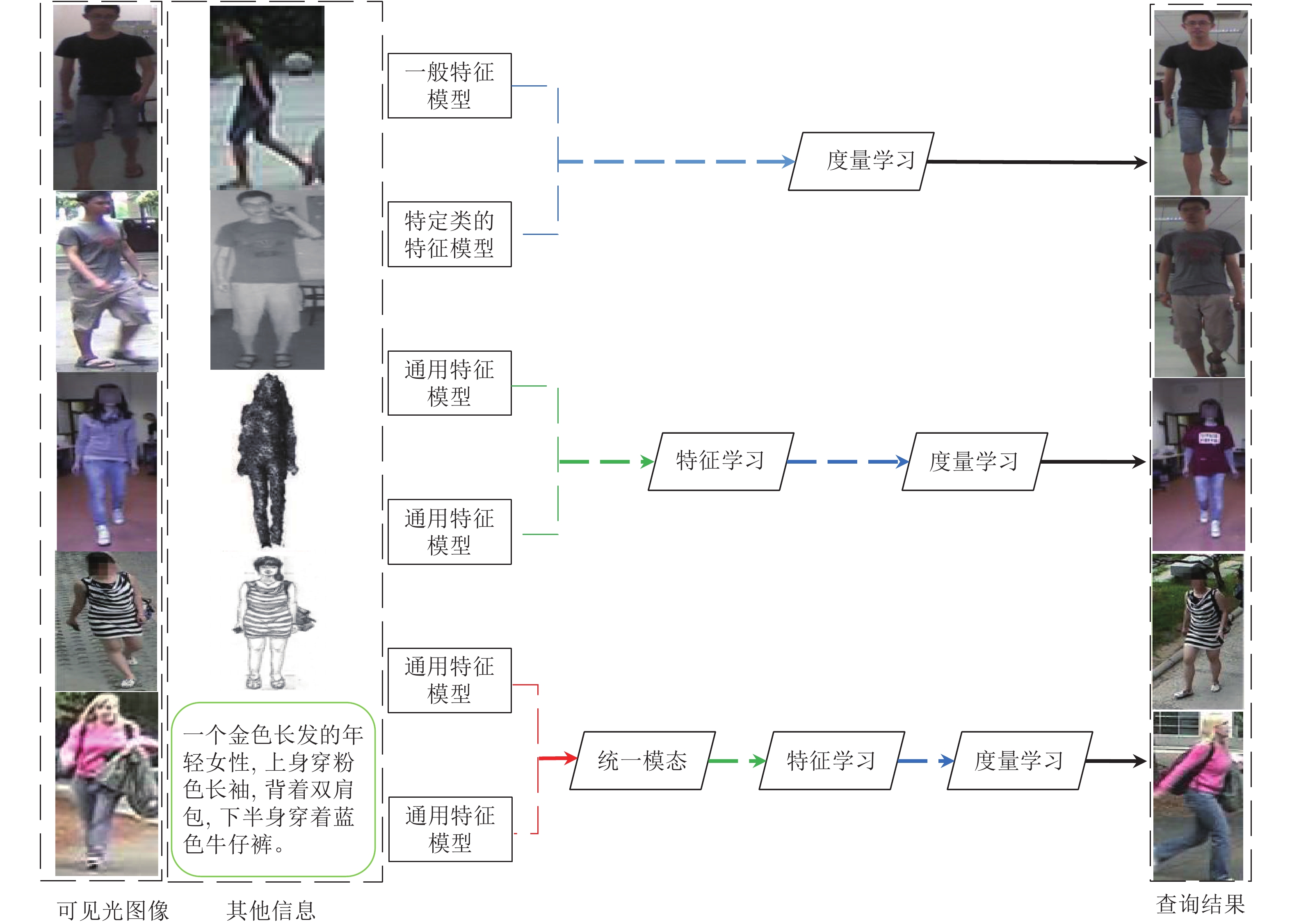
行人重识别是近年来计算机视觉领域的热点问题, 经过多年的发展, 基于可见光图像的一般行人重识别技术已经趋近成熟. 然而, 目前的研究多基于一个相对理想的假设, 即行人图像都是在光照充足的条件下拍摄的高分辨率图像. 因此虽然大多数的研究都能取得较为满意的效果, 但在实际环境中并不适用. 多源数据行人重识别即利用多种行人信息进行行人匹配的问题. 除了需要解决一般行人重识别所面临的问题外, 多源数据行人重识别技术还需要解决不同类型行人信息与一般行人图片相互匹配时的差异问题, 如低分辨率图像、红外图像、深度图像、文本信息和素描图像等. 因此, 与一般行人重识别方法相比, 多源数据行人重识别研究更具实用性, 同时也更具有挑战性. 本文首先介绍了一般行人重识别的发展现状和所面临的问题, 然后比较了多源数据行人重识别与一般行人重识别的区别, 并根据不同数据类型总结了5 类多源数据行人重识别问题, 分别从方法、数据集两个方面对现有工作做了归纳和分析. 与一般行人重识别技术相比, 多源数据行人重识别的优点是可以充分利用各类数据学习跨模态和类型的特征转换. 最后, 本文讨论了多源数据行人重识别未来的发展.
行人重识别是近年来计算机视觉领域的热点问题, 经过多年的发展, 基于可见光图像的一般行人重识别技术已经趋近成熟. 然而, 目前的研究多基于一个相对理想的假设, 即行人图像都是在光照充足的条件下拍摄的高分辨率图像. 因此虽然大多数的研究都能取得较为满意的效果, 但在实际环境中并不适用. 多源数据行人重识别即利用多种行人信息进行行人匹配的问题. 除了需要解决一般行人重识别所面临的问题外, 多源数据行人重识别技术还需要解决不同类型行人信息与一般行人图片相互匹配时的差异问题, 如低分辨率图像、红外图像、深度图像、文本信息和素描图像等. 因此, 与一般行人重识别方法相比, 多源数据行人重识别研究更具实用性, 同时也更具有挑战性. 本文首先介绍了一般行人重识别的发展现状和所面临的问题, 然后比较了多源数据行人重识别与一般行人重识别的区别, 并根据不同数据类型总结了5 类多源数据行人重识别问题, 分别从方法、数据集两个方面对现有工作做了归纳和分析. 与一般行人重识别技术相比, 多源数据行人重识别的优点是可以充分利用各类数据学习跨模态和类型的特征转换. 最后, 本文讨论了多源数据行人重识别未来的发展.


2020, 46(9): 1885-1895.
doi: 10.16383/j.aas.c200370
cstr: 32138.14.j.aas.c200370
摘要:
平行于第Ⅰ部分中提出的非线性系统的全驱性概念, 本文提出了非线性系统的全量测性概念.首先给出了非线性系统的一种能观规范型, 并证明了任何与该类非线性系统能观规范型等价的系统, 以及任何能观的线性系统, 都等价于一个高阶全量测系统.然后据此提出了一般动态系统的完全能观性定义, 同时指出线性系统的完全能观性等同于其通常意义下的能观性.最后提出了非线性全量测系统观测器设计的一种简洁方法.基于这种设计, 可以使观测误差系统为线性定常系统, 并且可以任意配置其特征多项式的系数矩阵.
平行于第Ⅰ部分中提出的非线性系统的全驱性概念, 本文提出了非线性系统的全量测性概念.首先给出了非线性系统的一种能观规范型, 并证明了任何与该类非线性系统能观规范型等价的系统, 以及任何能观的线性系统, 都等价于一个高阶全量测系统.然后据此提出了一般动态系统的完全能观性定义, 同时指出线性系统的完全能观性等同于其通常意义下的能观性.最后提出了非线性全量测系统观测器设计的一种简洁方法.基于这种设计, 可以使观测误差系统为线性定常系统, 并且可以任意配置其特征多项式的系数矩阵.
2020, 46(9): 1896-1907.
doi: 10.16383/j.aas.c190028
cstr: 32138.14.j.aas.c190028
摘要:
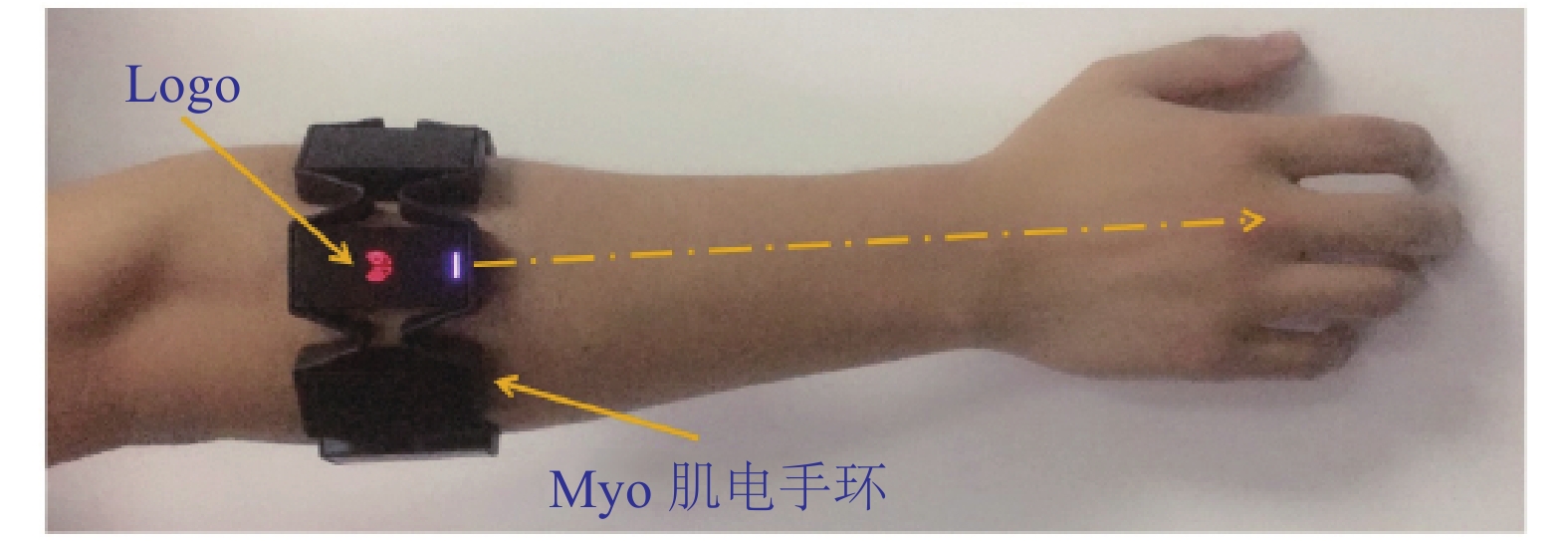
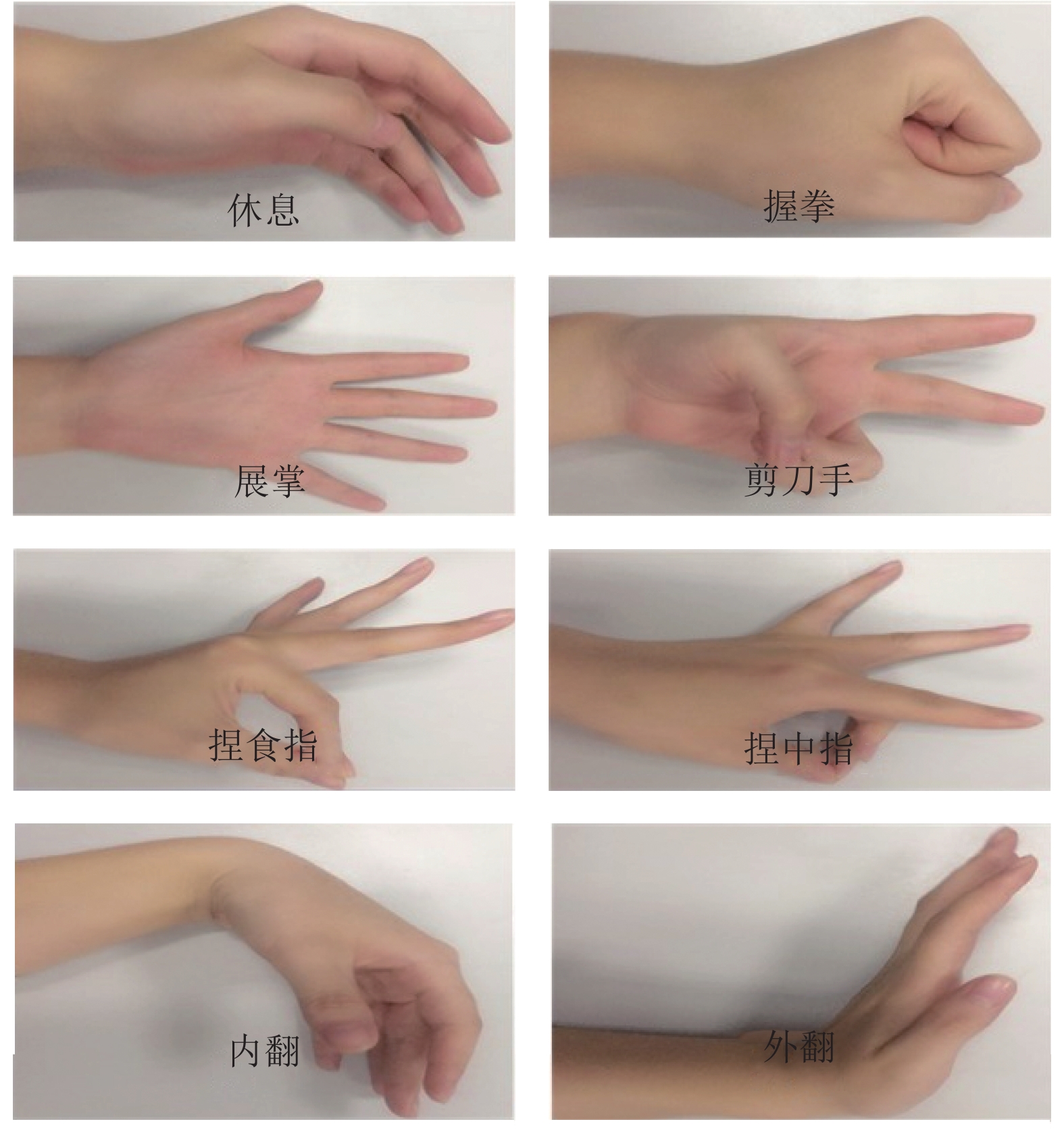
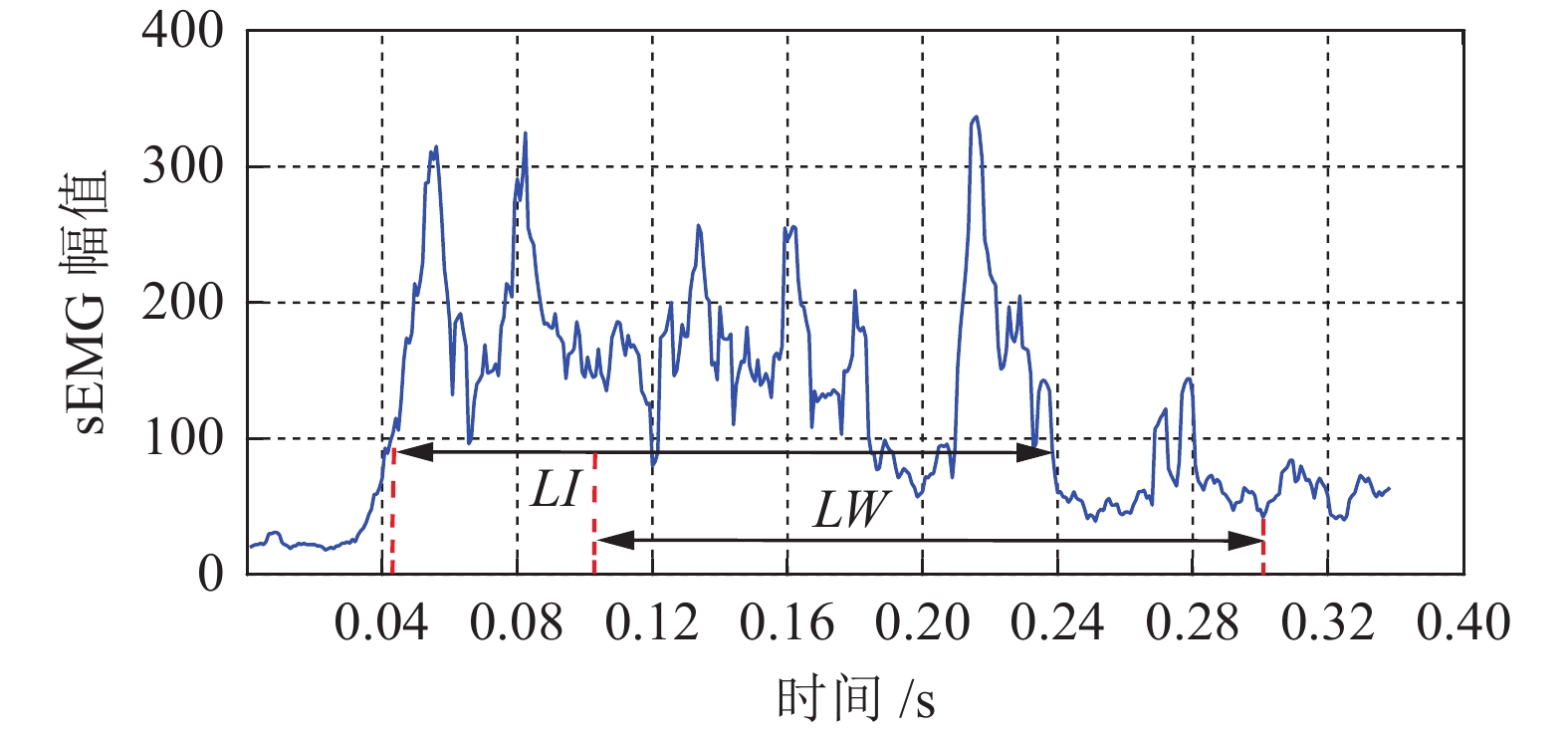
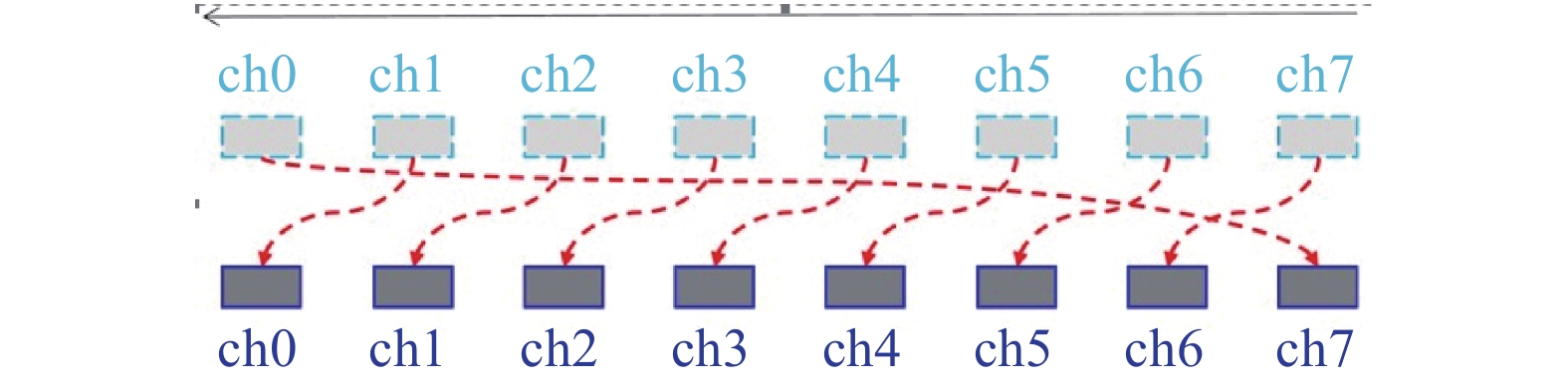
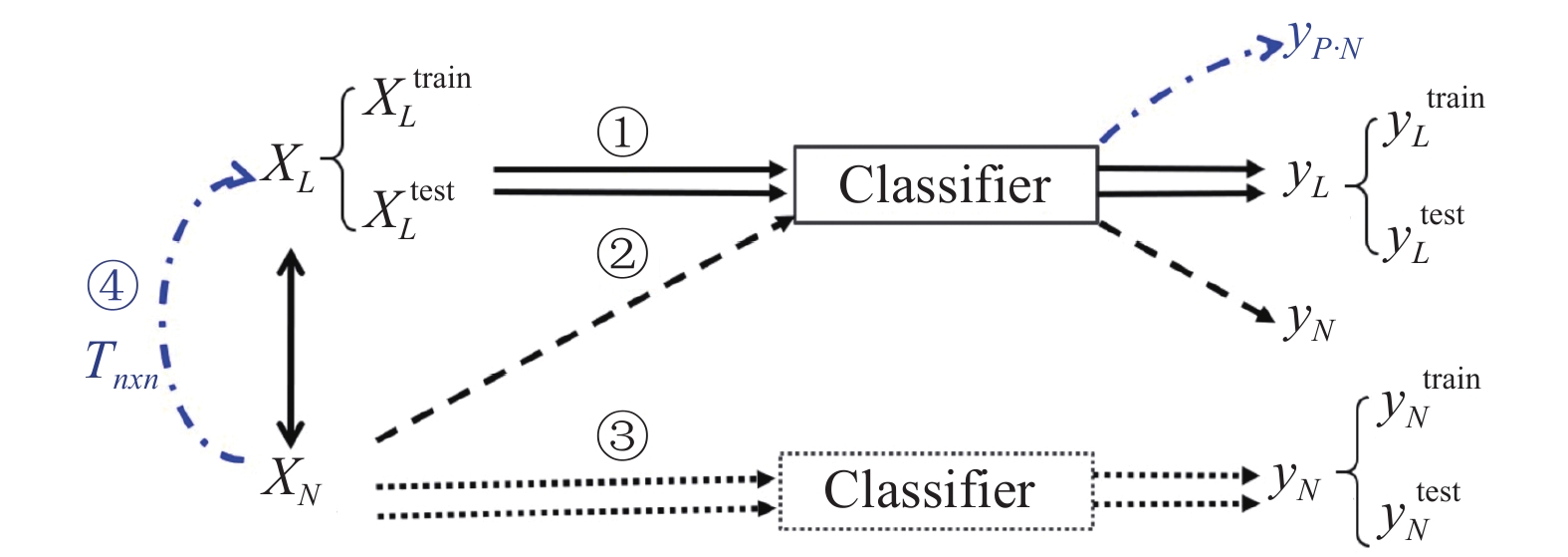
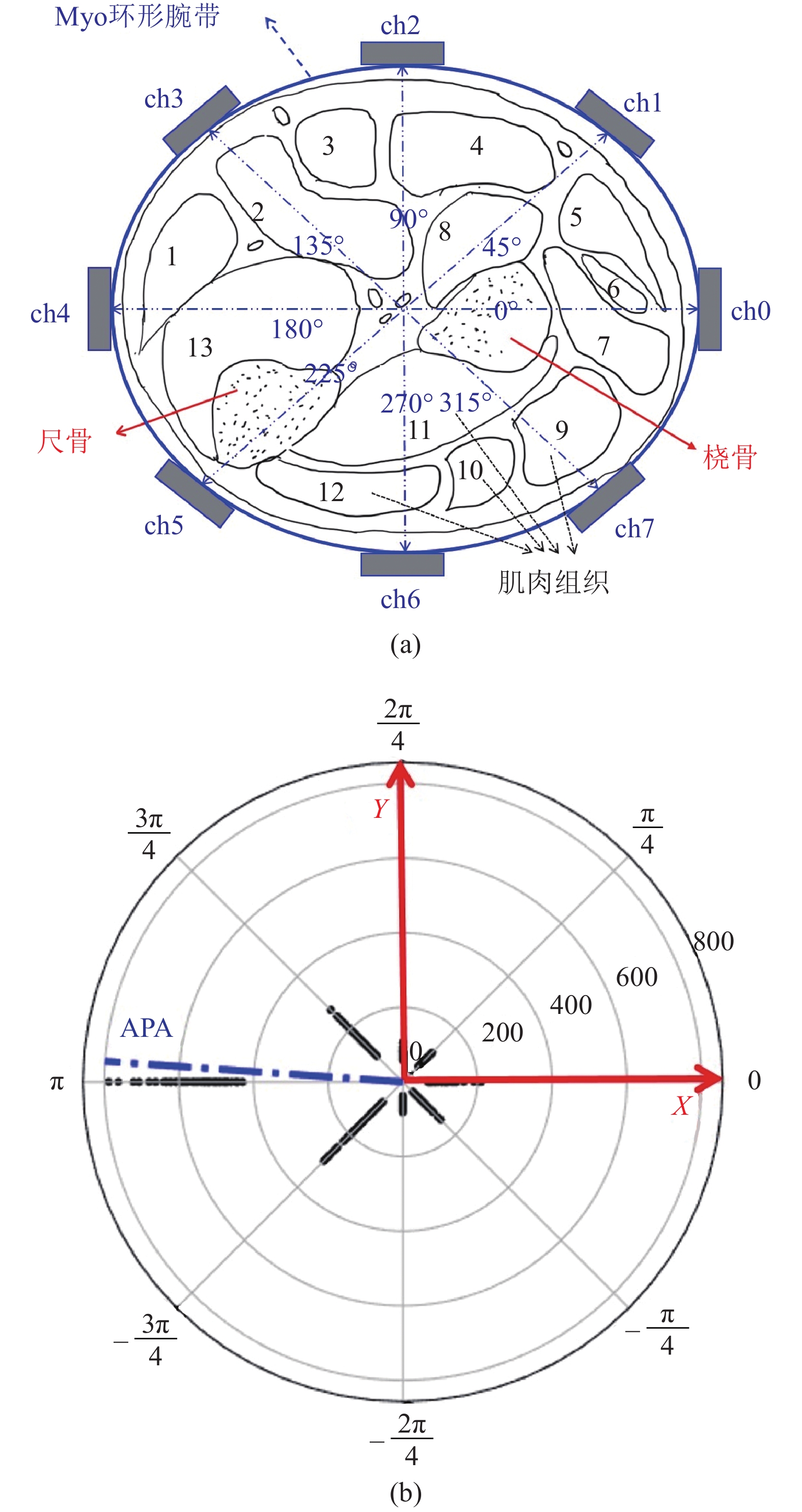
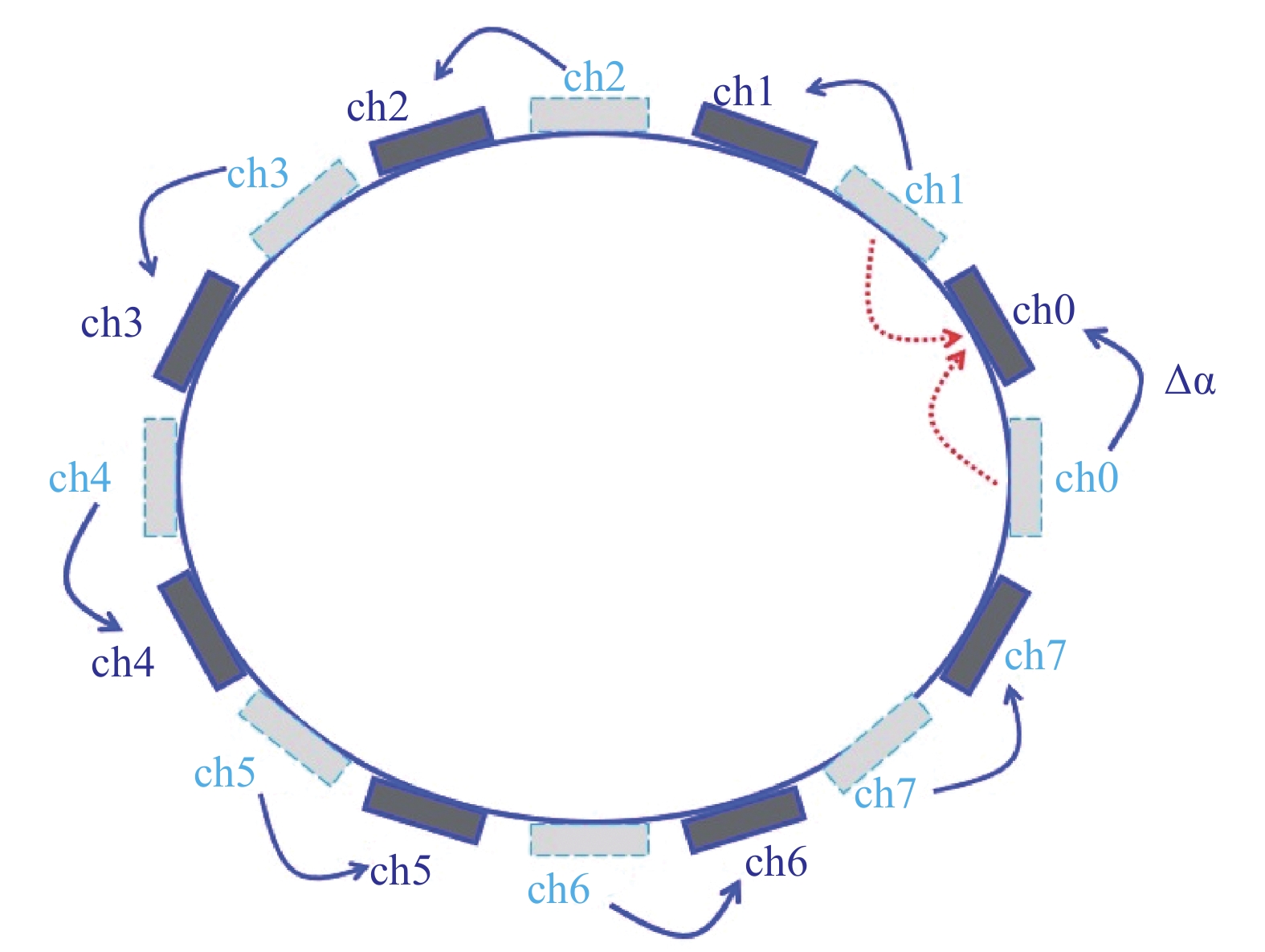
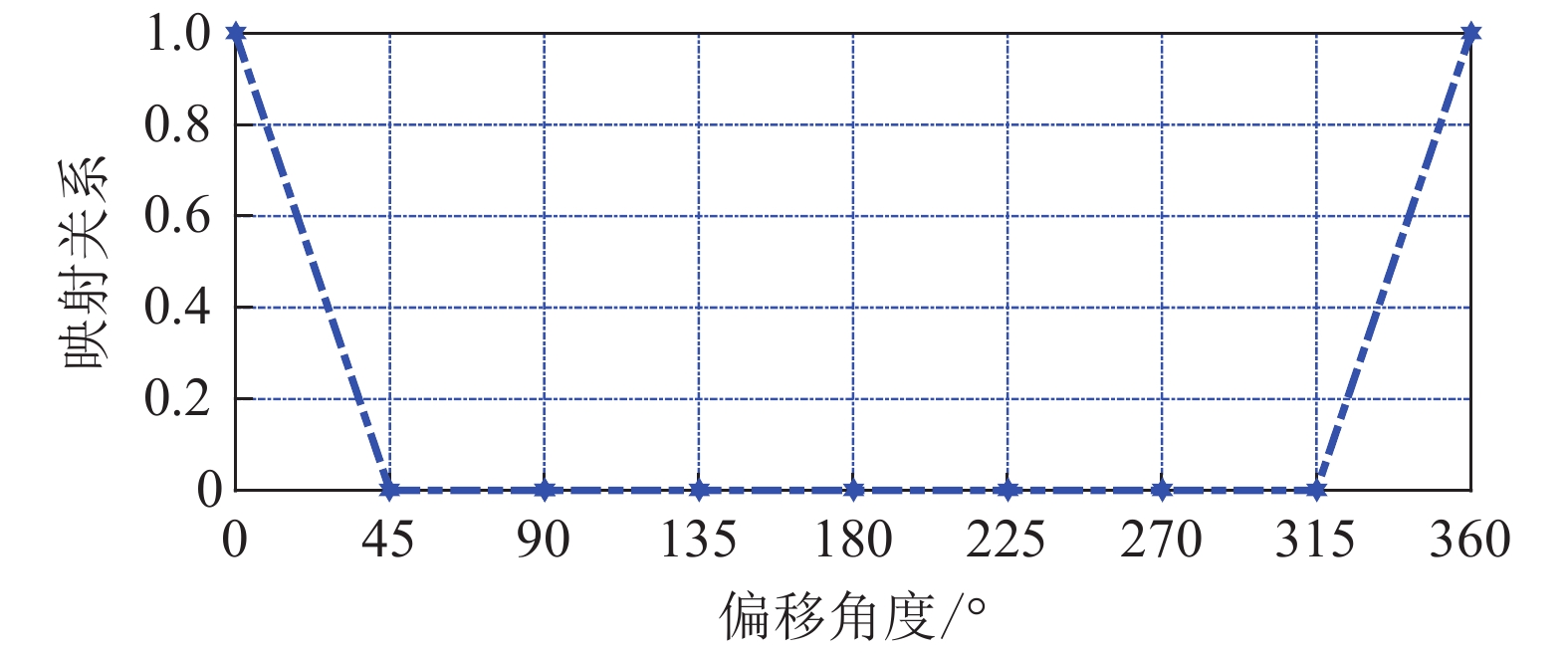
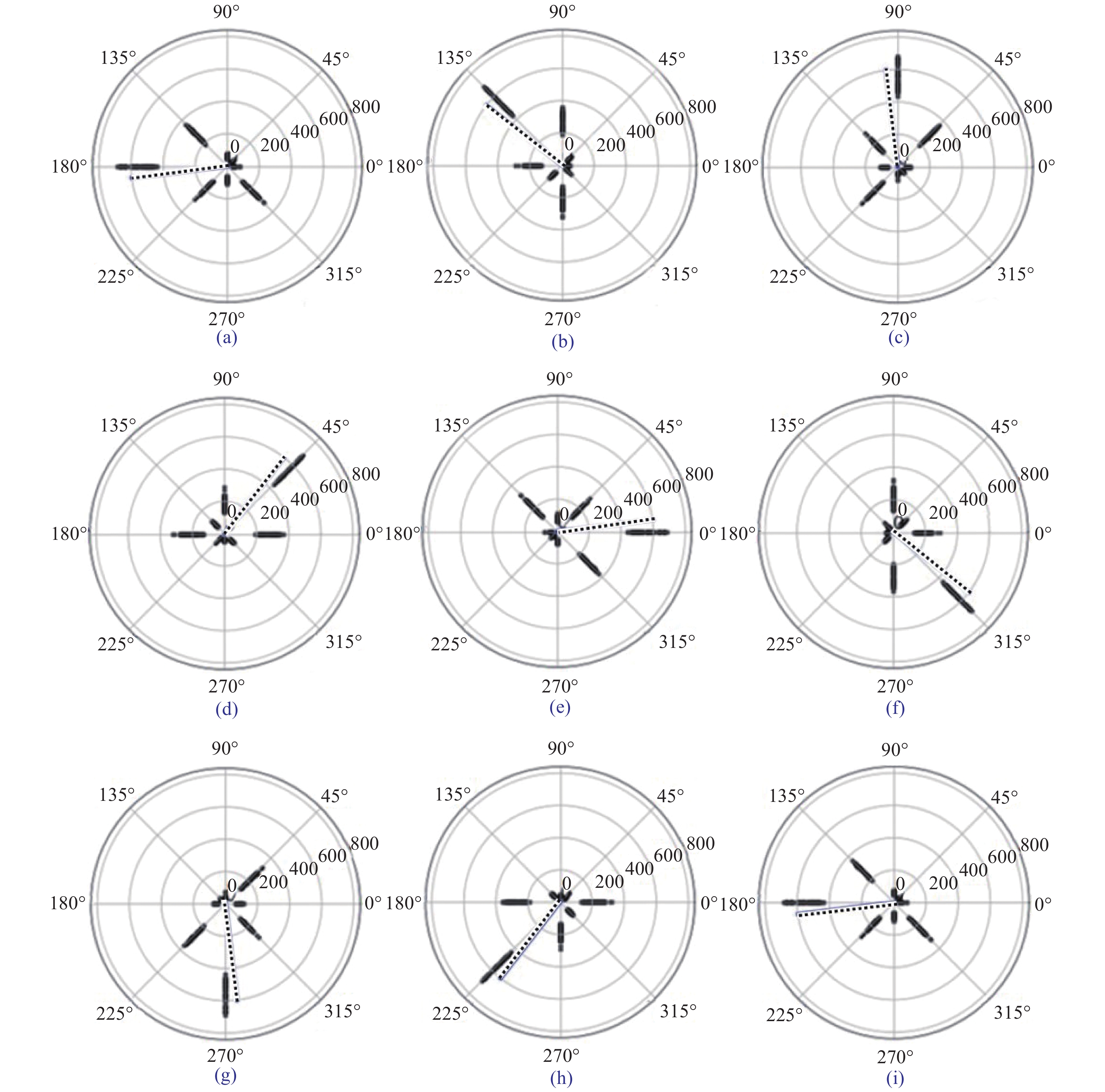
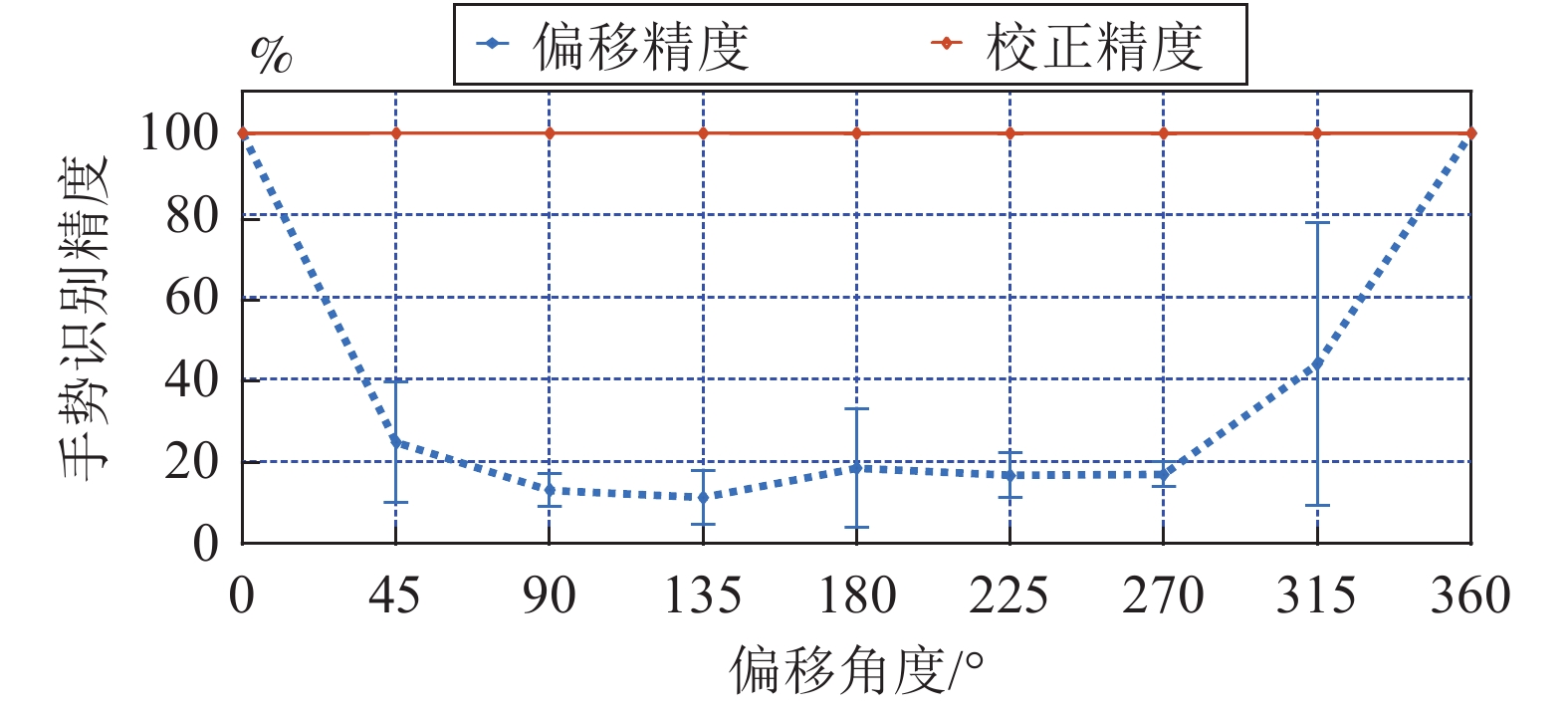
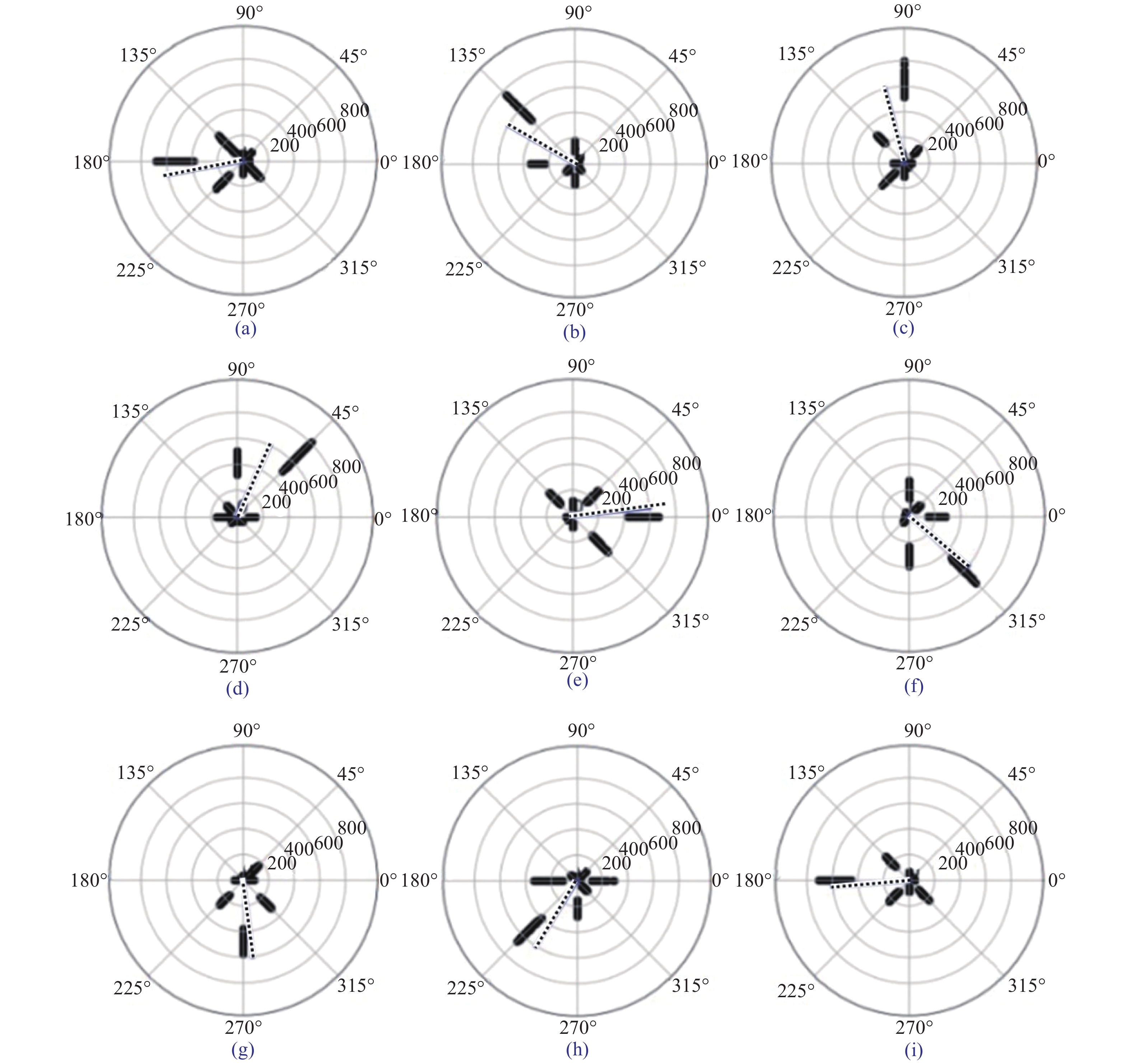
在基于表面肌电信号(Surface electromyography, sEMG)的手势识别系统中, 针对Myo环形电极多次实验间旋转位置不同导致的识别精度降低问题, 提出了一种基于极坐标系的电极位置偏移估计与自适应校正的识别方法. 该方法首先建立相对于环形肌电传感器的极坐标系, 提出了极坐标系下活跃极角(Activation polar angle, APA), 用于估计实验中传感器相对于初始位置的横向旋转偏移角度; 进而建立基于偏移角度的线性变换模型, 在肌电信号特征空间内, 对电极偏移位置下的样本进行自适应校正. 在8 种常用手势识别应用中, 设计了两种实验范式: 利用传感器各通道数据循环平移模拟电极横向旋转偏移实验和肌电传感器在小臂肌肉上的真实旋转偏移实验. 结果均表明所提出方法的识别精度远高于未进行校正的模型识别精度. 因此, 所提出的电极偏移估计与自适应校正识别方法, 不仅有效提高了表面肌电交互系统识别的鲁棒性, 也降低了使用者在多次使用时训练成本与学习负担.
在基于表面肌电信号(Surface electromyography, sEMG)的手势识别系统中, 针对Myo环形电极多次实验间旋转位置不同导致的识别精度降低问题, 提出了一种基于极坐标系的电极位置偏移估计与自适应校正的识别方法. 该方法首先建立相对于环形肌电传感器的极坐标系, 提出了极坐标系下活跃极角(Activation polar angle, APA), 用于估计实验中传感器相对于初始位置的横向旋转偏移角度; 进而建立基于偏移角度的线性变换模型, 在肌电信号特征空间内, 对电极偏移位置下的样本进行自适应校正. 在8 种常用手势识别应用中, 设计了两种实验范式: 利用传感器各通道数据循环平移模拟电极横向旋转偏移实验和肌电传感器在小臂肌肉上的真实旋转偏移实验. 结果均表明所提出方法的识别精度远高于未进行校正的模型识别精度. 因此, 所提出的电极偏移估计与自适应校正识别方法, 不仅有效提高了表面肌电交互系统识别的鲁棒性, 也降低了使用者在多次使用时训练成本与学习负担.


2020, 46(9): 1908-1926.
doi: 10.16383/j.aas.c190899
cstr: 32138.14.j.aas.c190899
摘要:
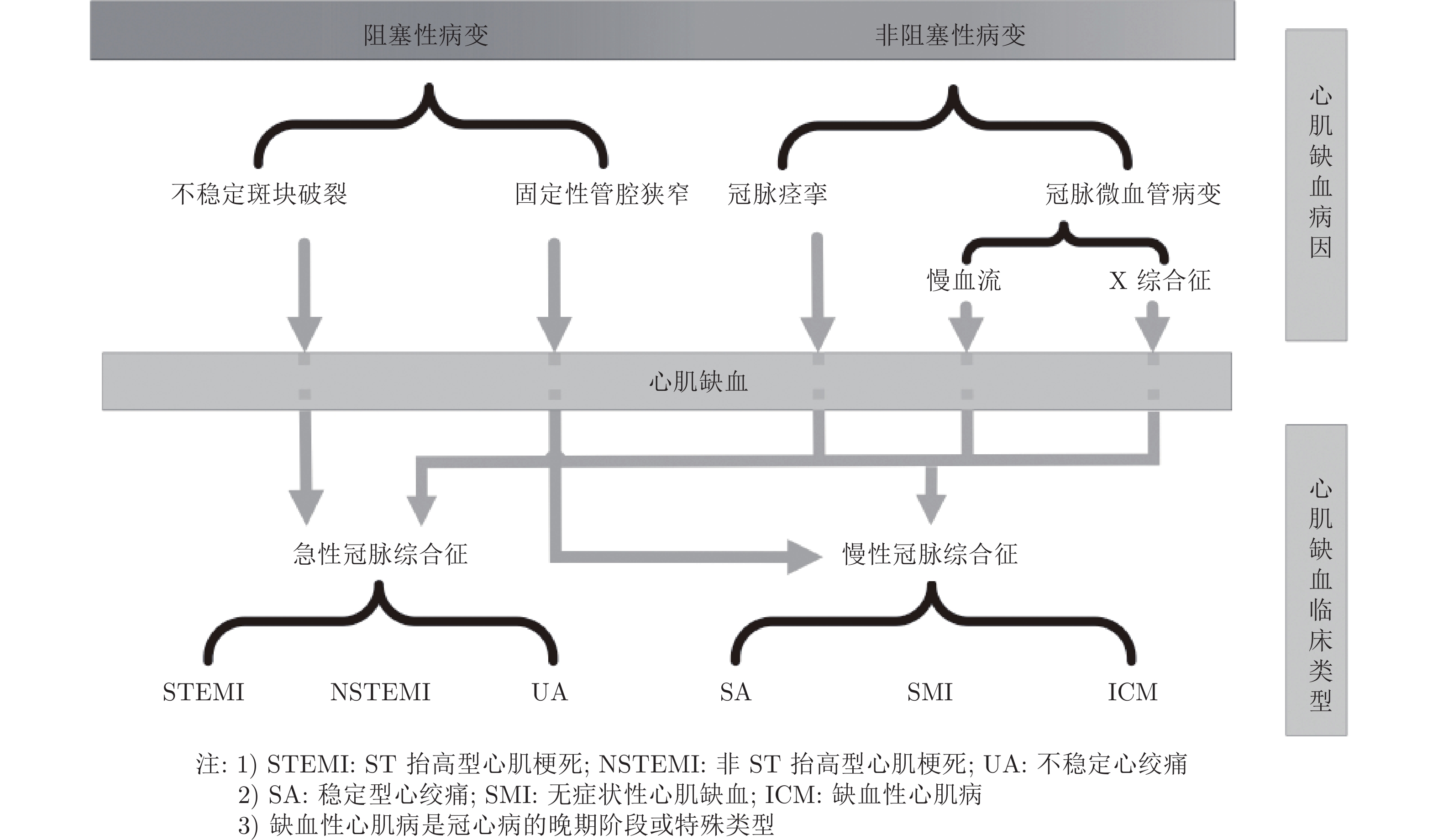
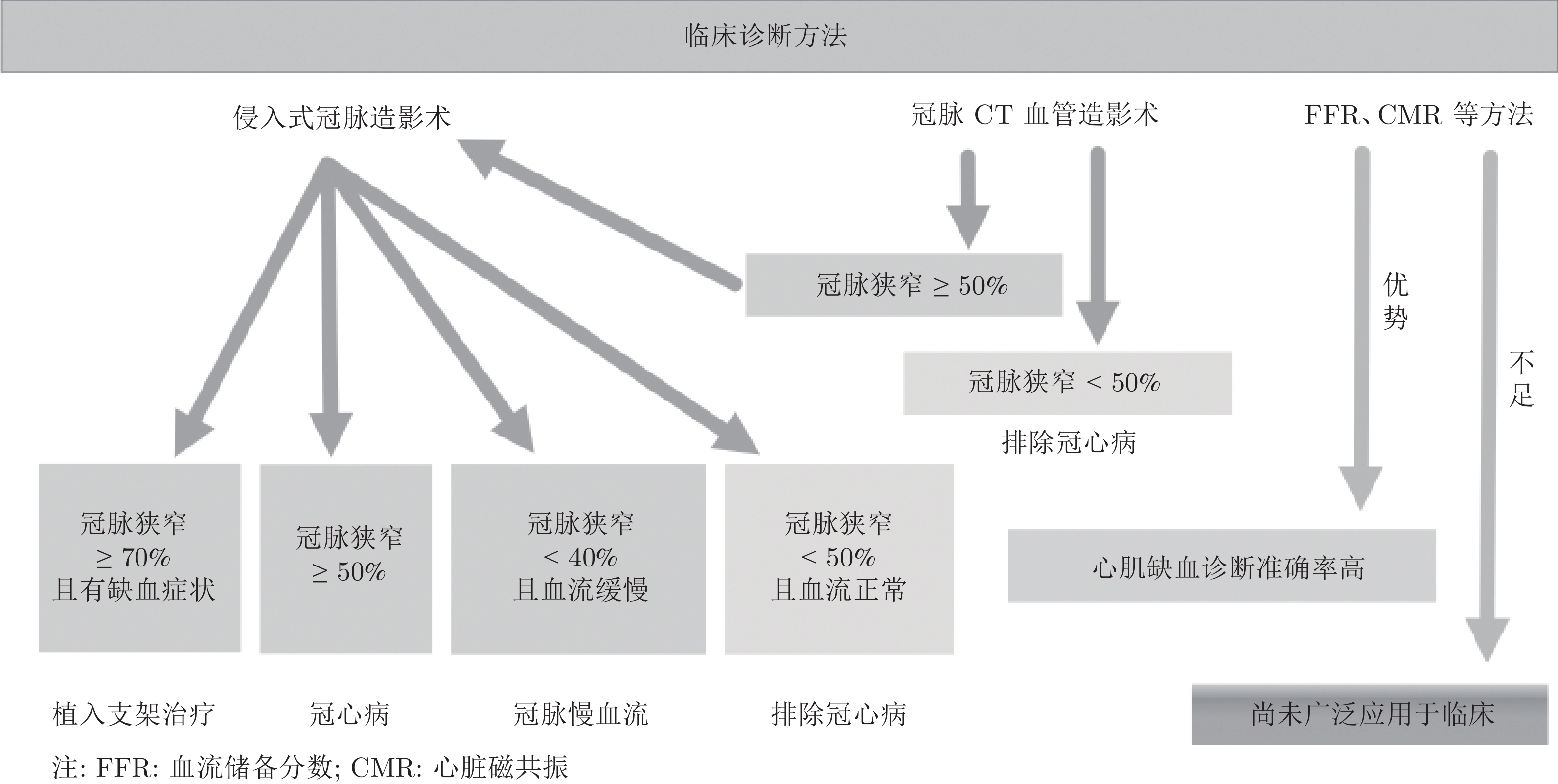
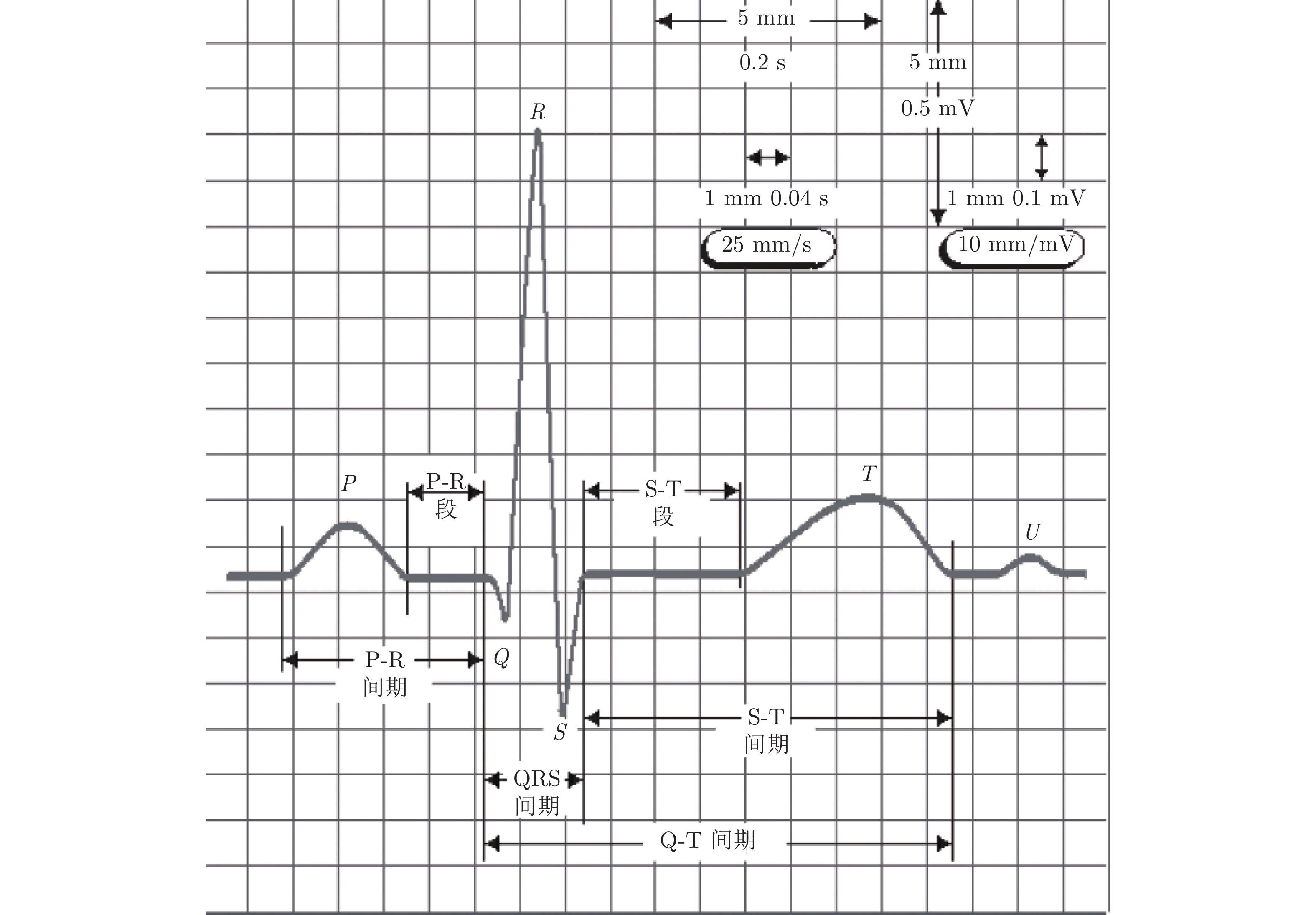
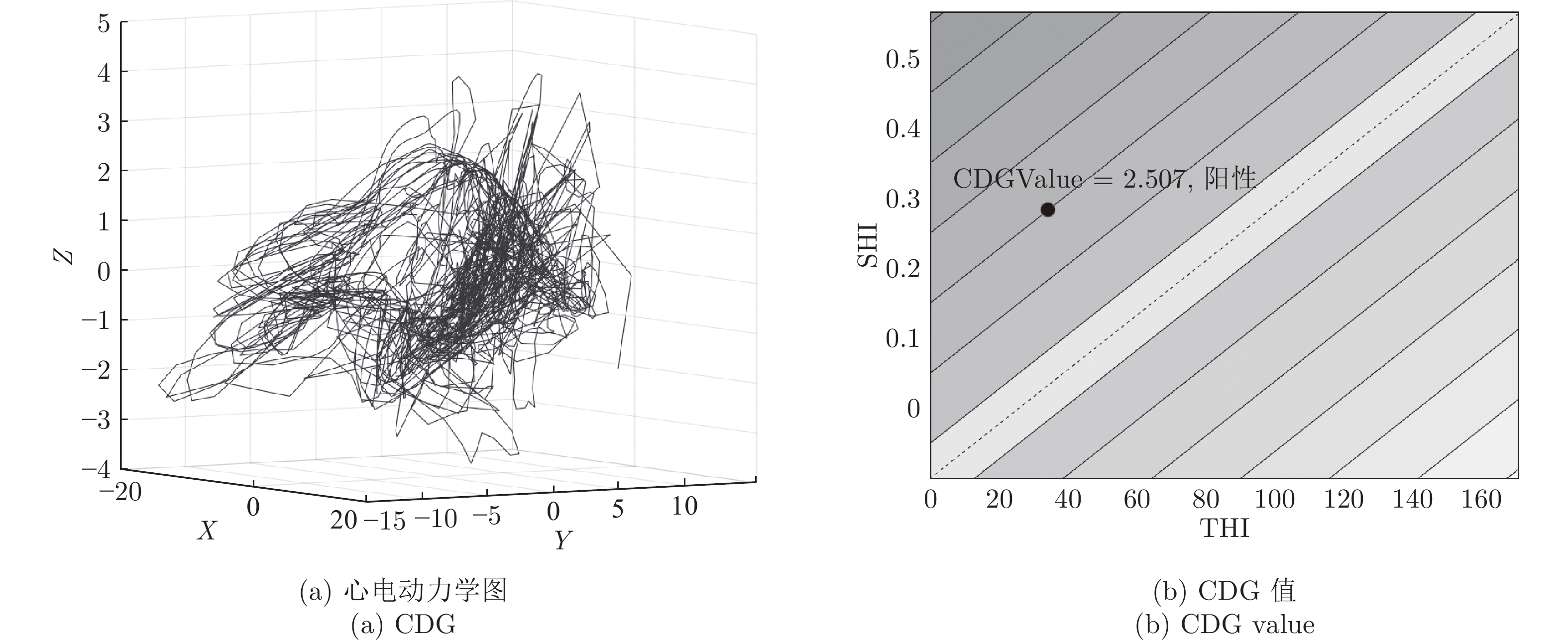
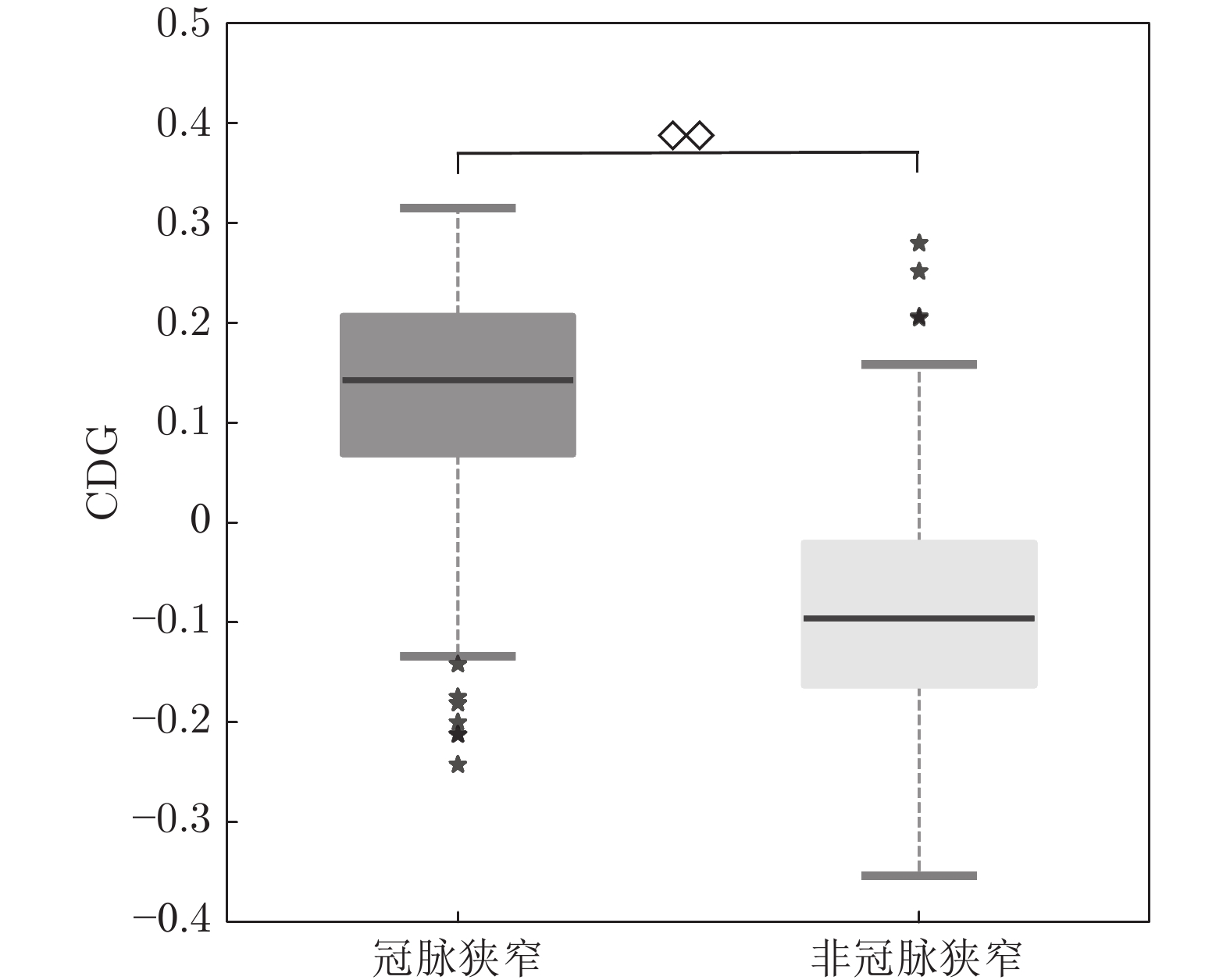
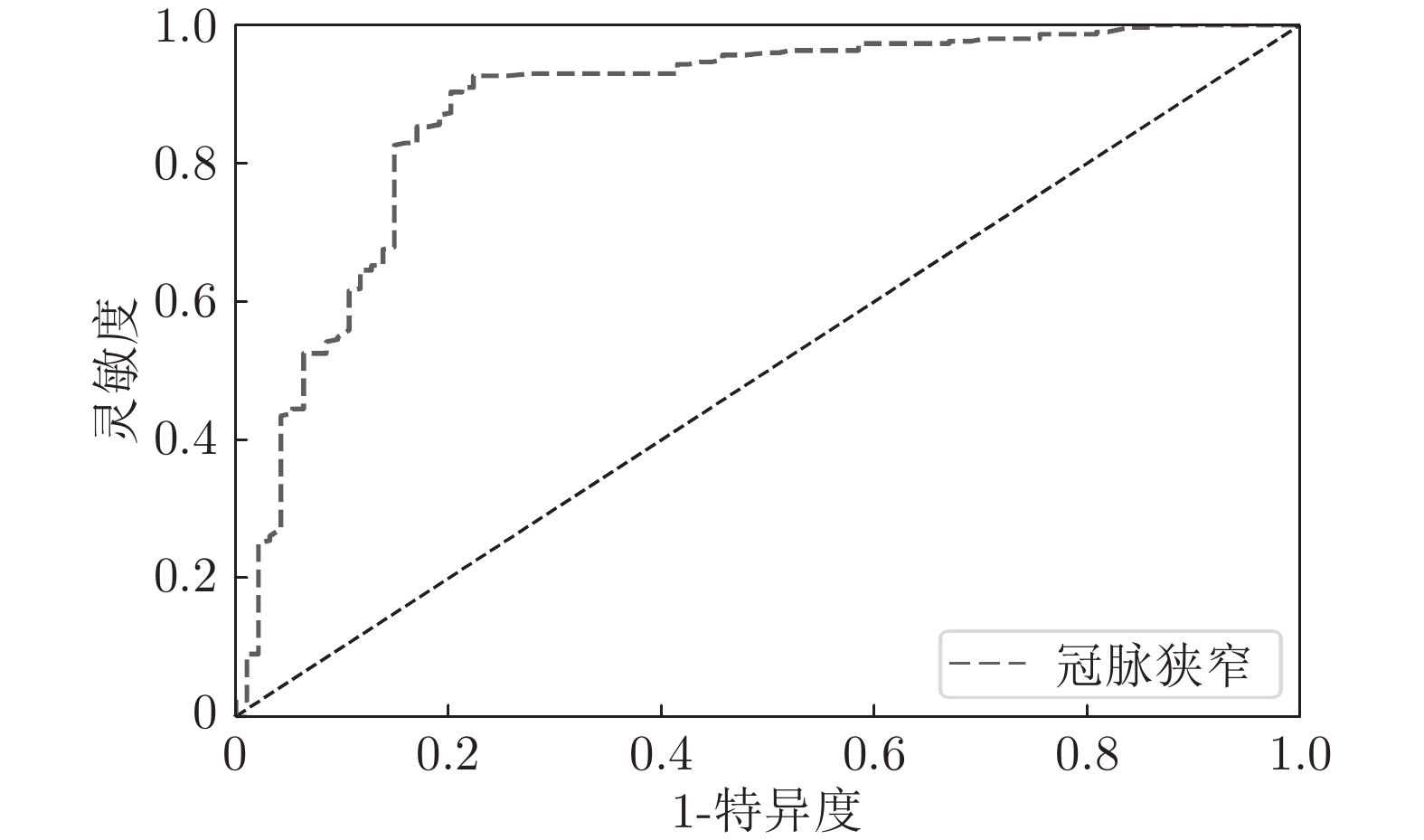
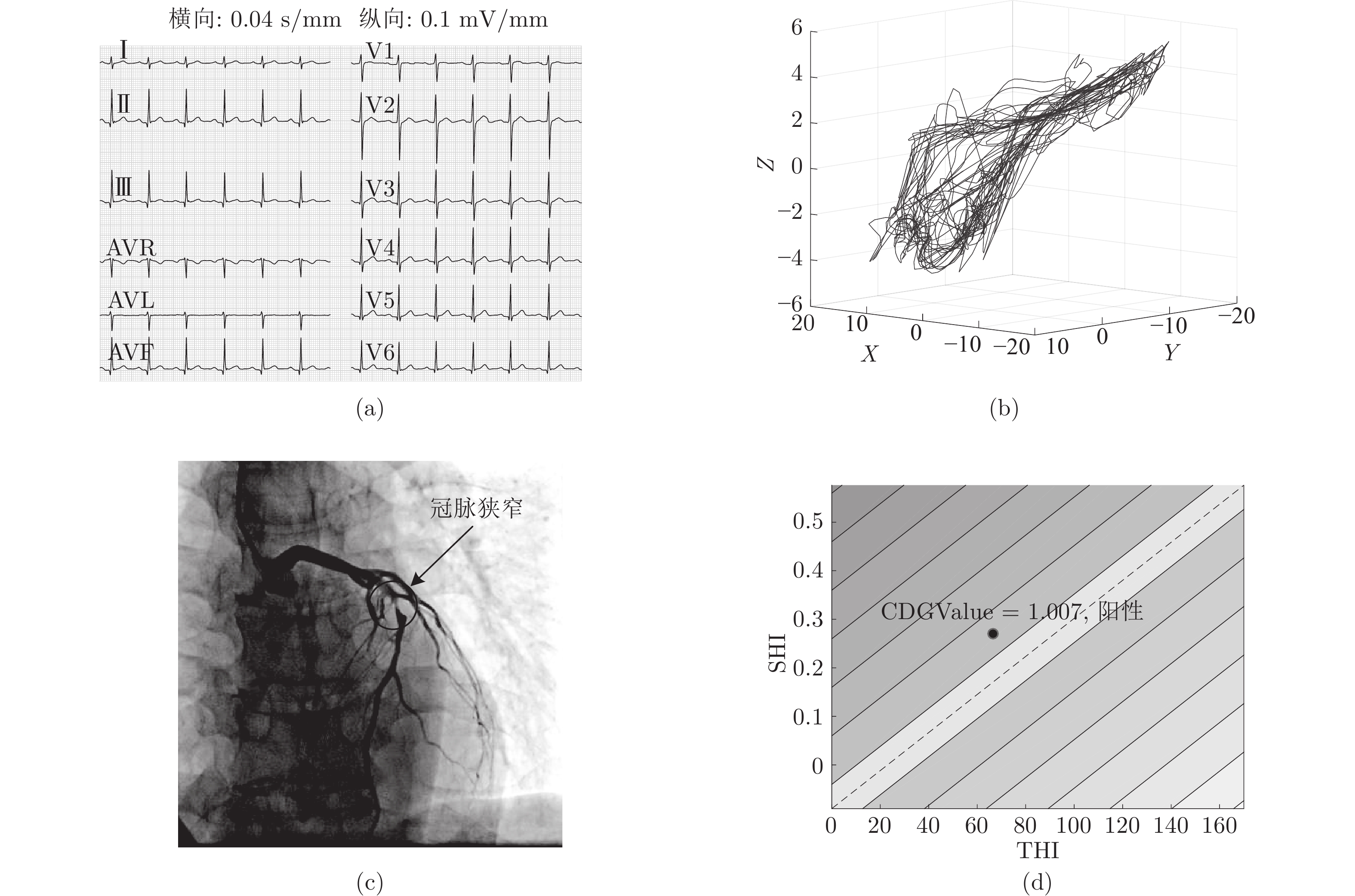
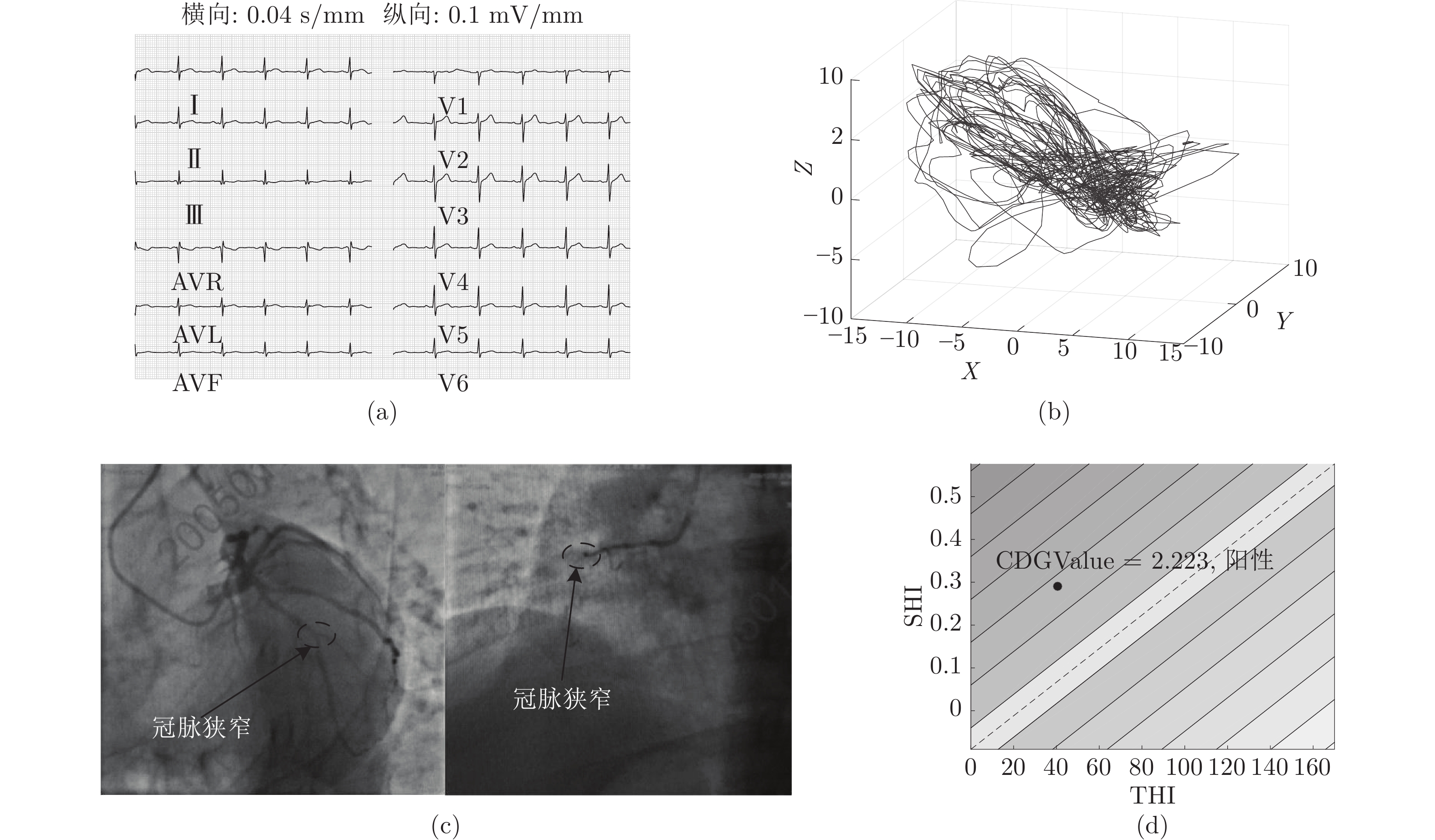
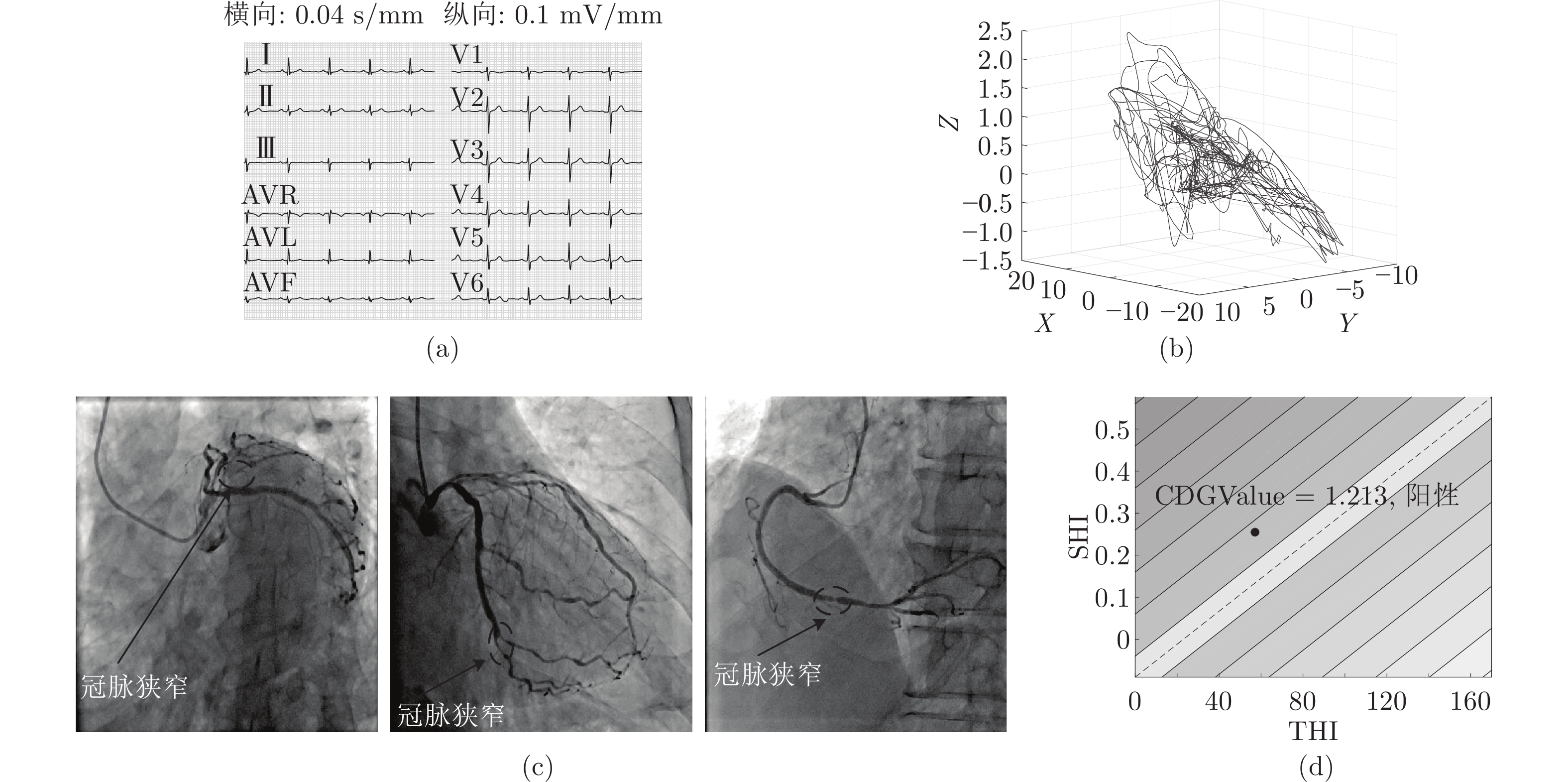
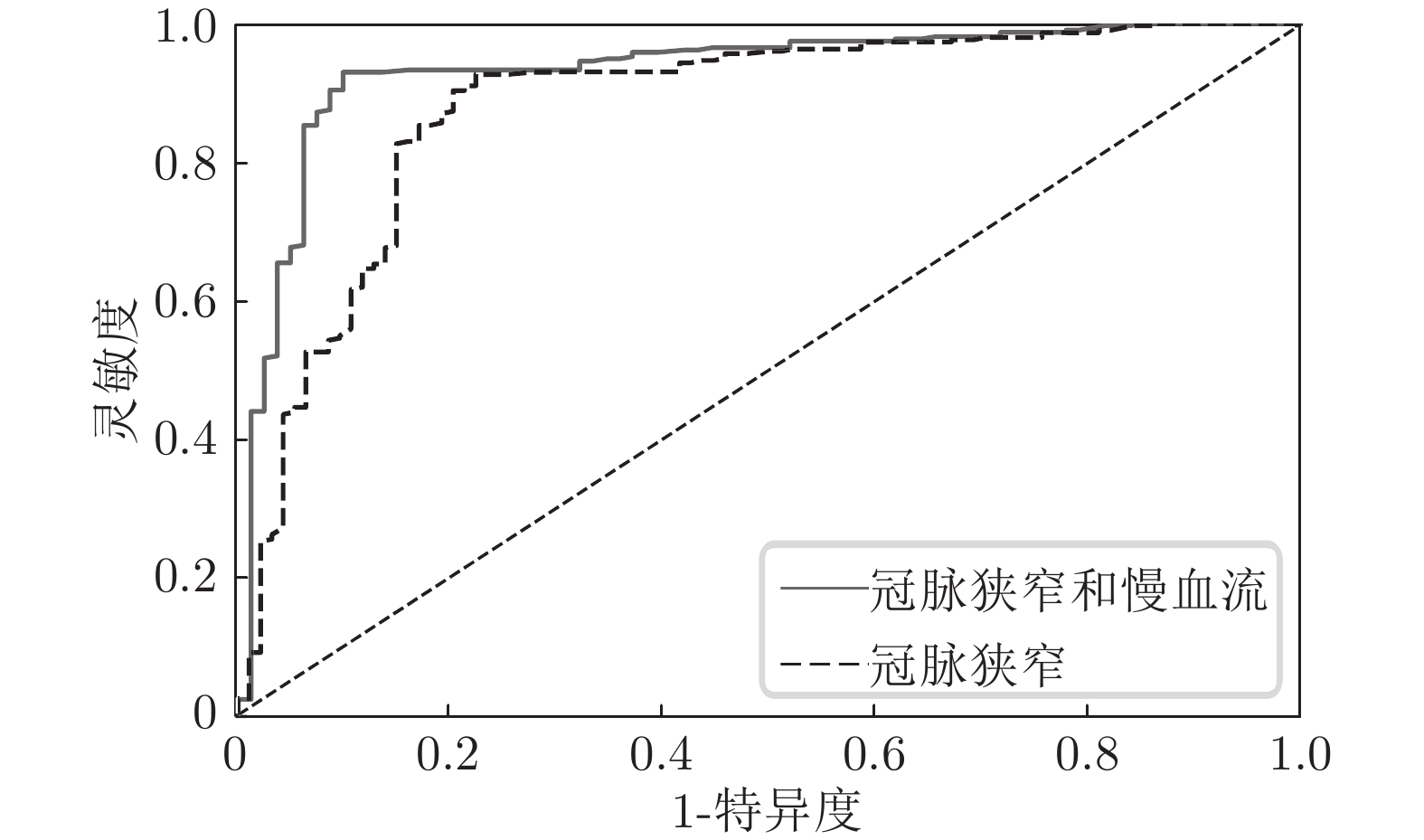
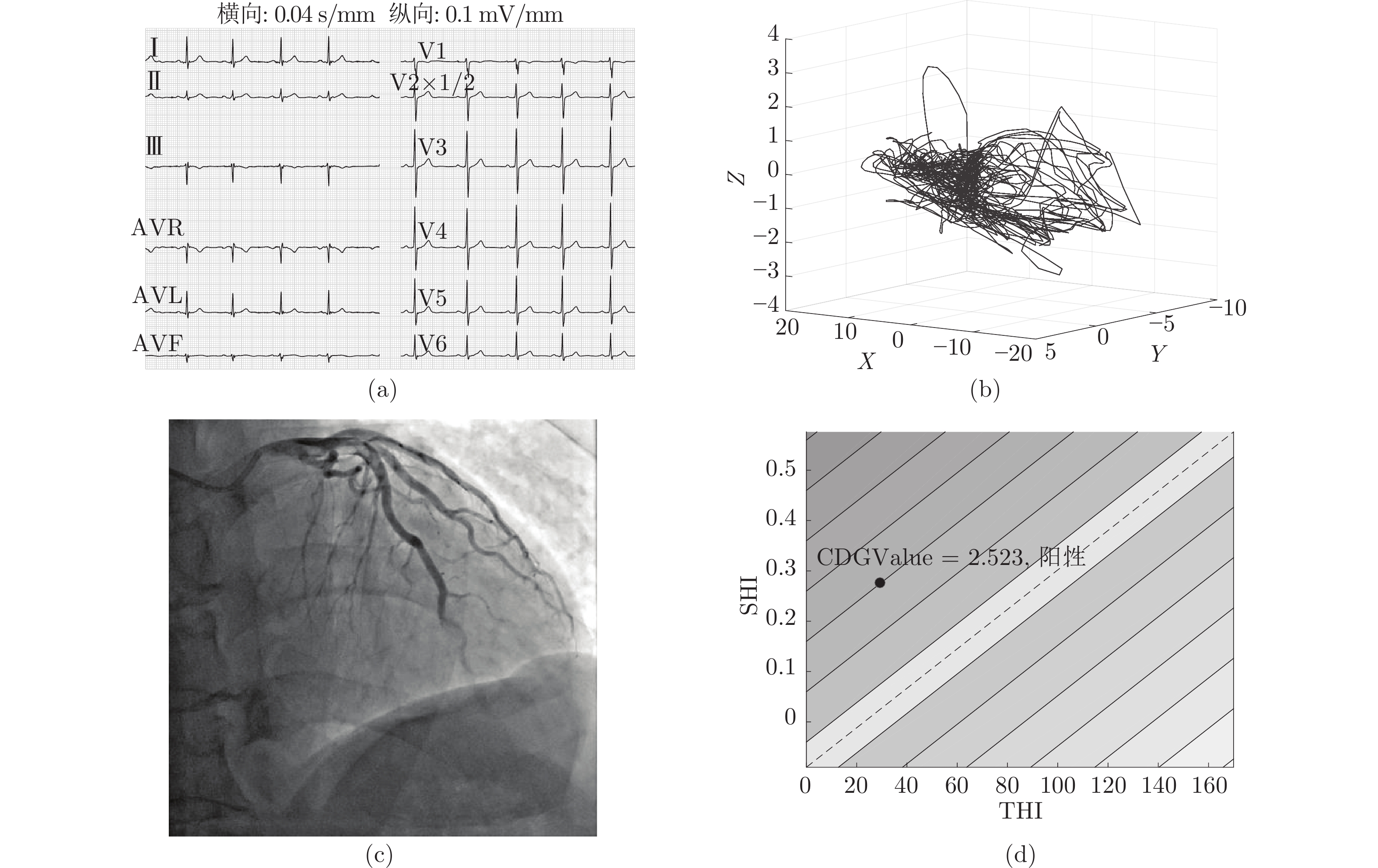
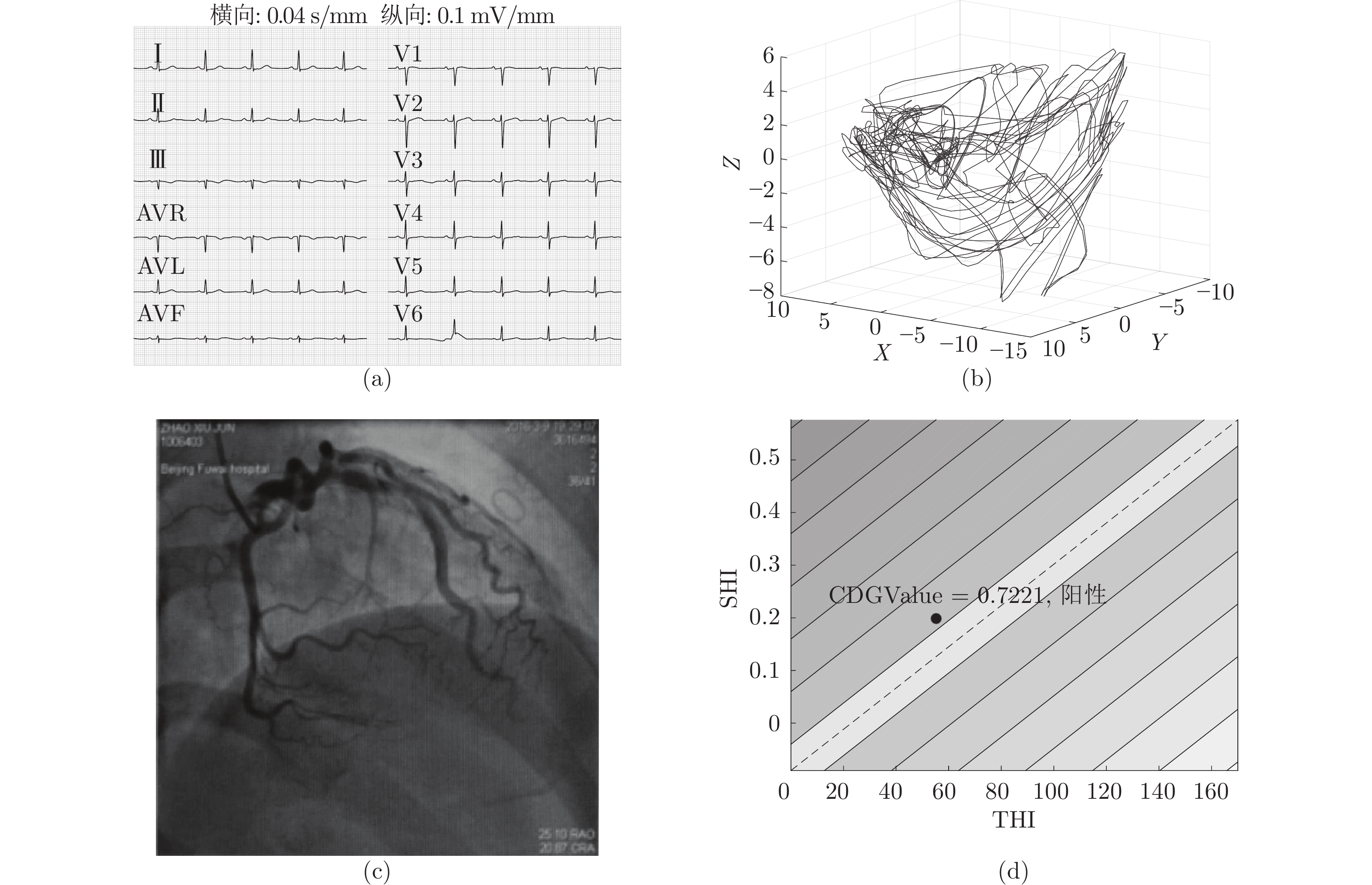
心肌缺血早期检测是心血管疾病领域重要且困难的问题. 本文采用心电动力学图(Cardiodynamicsgram, CDG)开展心电图正常及大致正常时的心肌缺血早期检测研究. 1) 在分析已有基于心电图的心肌缺血检测方法所取得的进展及不足基础上, 构建一个既有心电图发生缺血性改变、又有心电图正常及大致正常、且包括经冠脉造影检验为冠脉阻塞性病变和非阻塞性病变的较大规模心肌缺血数据集. 2) 针对上述数据集中393例心电图正常及大致正常患者, 利用确定学习生成每份心电图的心电动力学图, 提取对心肌缺血和非缺血具有显著区分能力的心电动力学特征. 并以冠脉狭窄\begin{document}$ \ge$\end{document} ![]()
![]()
心肌缺血早期检测是心血管疾病领域重要且困难的问题. 本文采用心电动力学图(Cardiodynamicsgram, CDG)开展心电图正常及大致正常时的心肌缺血早期检测研究. 1) 在分析已有基于心电图的心肌缺血检测方法所取得的进展及不足基础上, 构建一个既有心电图发生缺血性改变、又有心电图正常及大致正常、且包括经冠脉造影检验为冠脉阻塞性病变和非阻塞性病变的较大规模心肌缺血数据集. 2) 针对上述数据集中393例心电图正常及大致正常患者, 利用确定学习生成每份心电图的心电动力学图, 提取对心肌缺血和非缺血具有显著区分能力的心电动力学特征. 并以冠脉狭窄


2020, 46(9): 1927-1940.
doi: 10.16383/j.aas.c190008
cstr: 32138.14.j.aas.c190008
摘要:
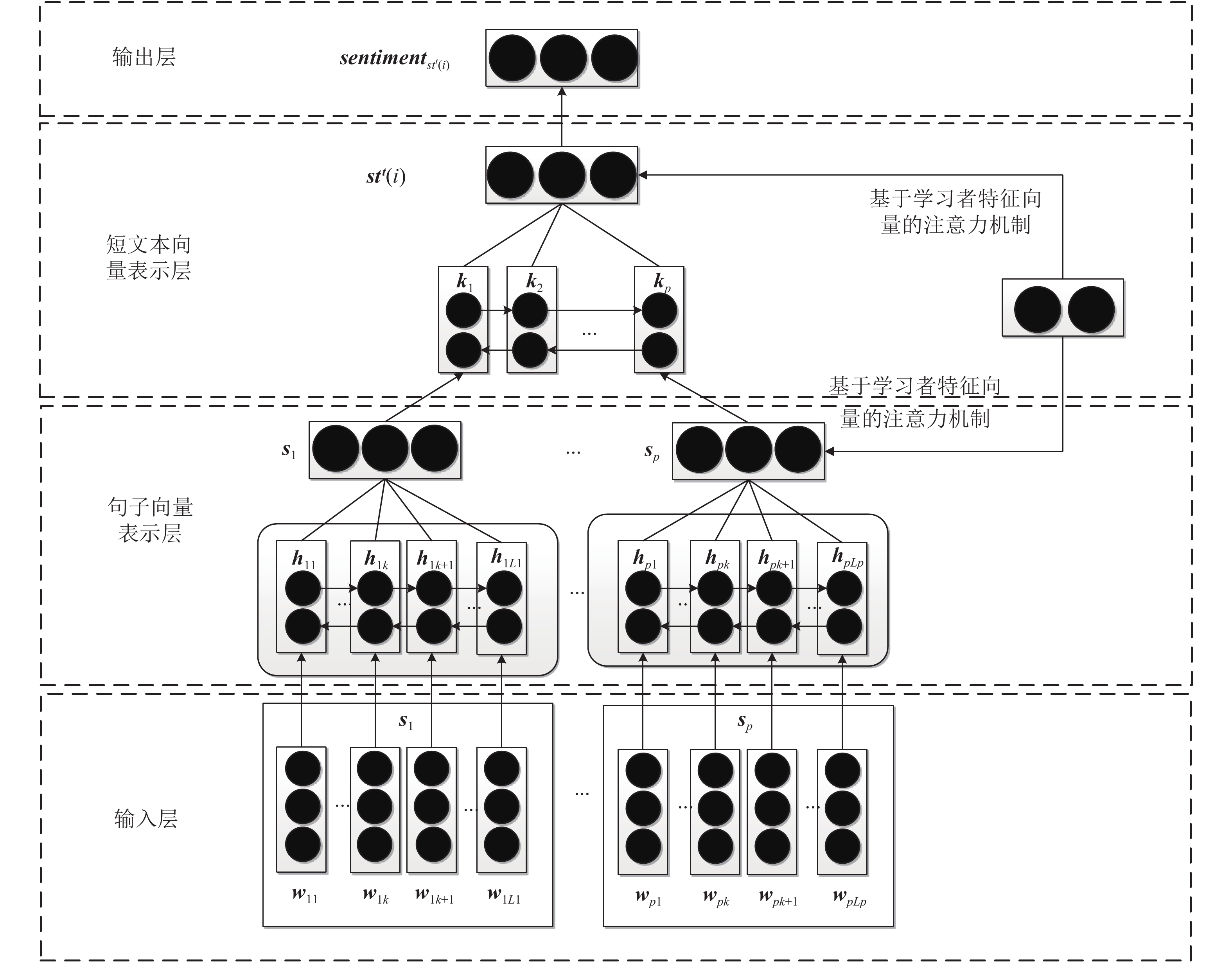
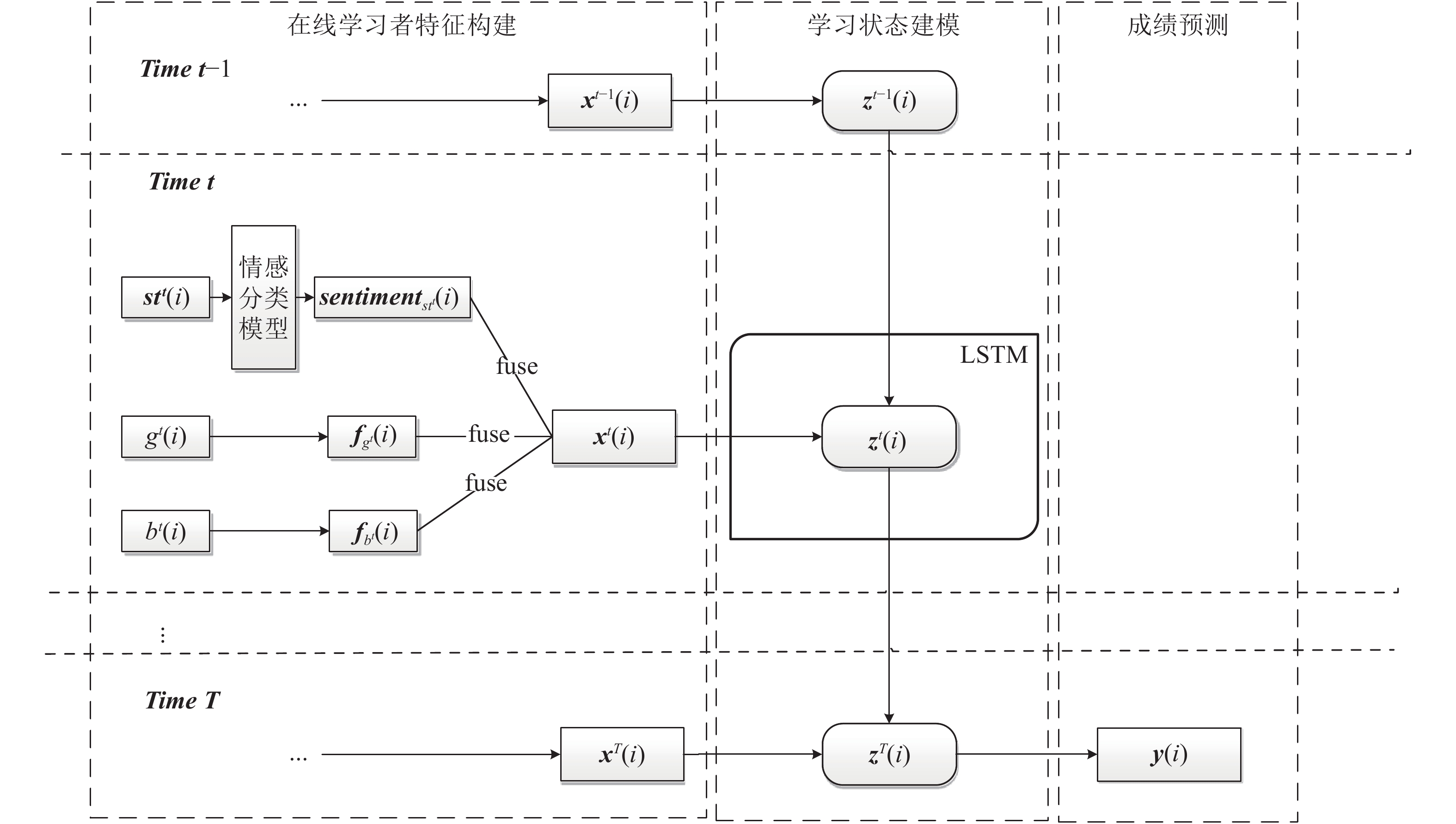
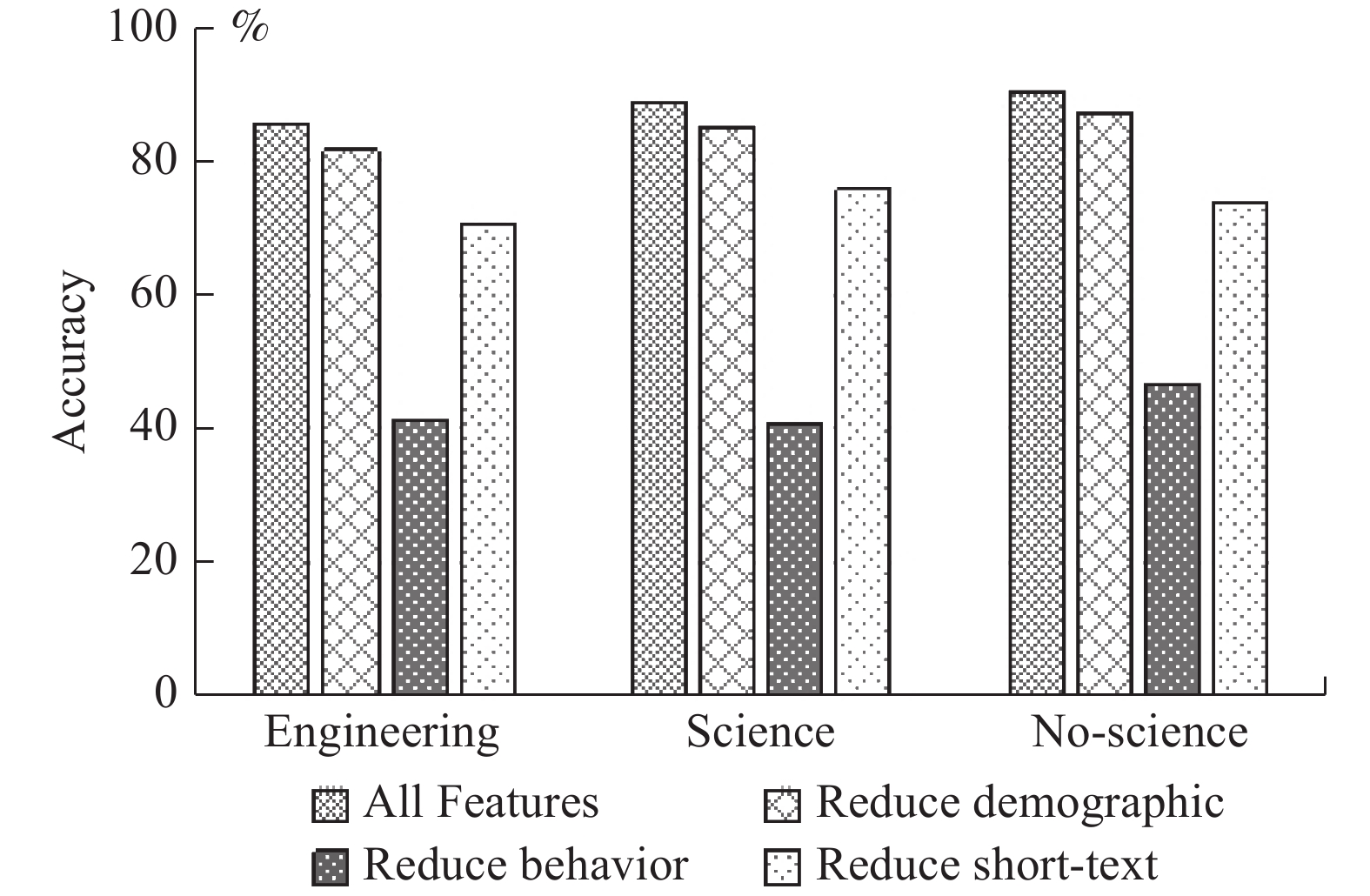
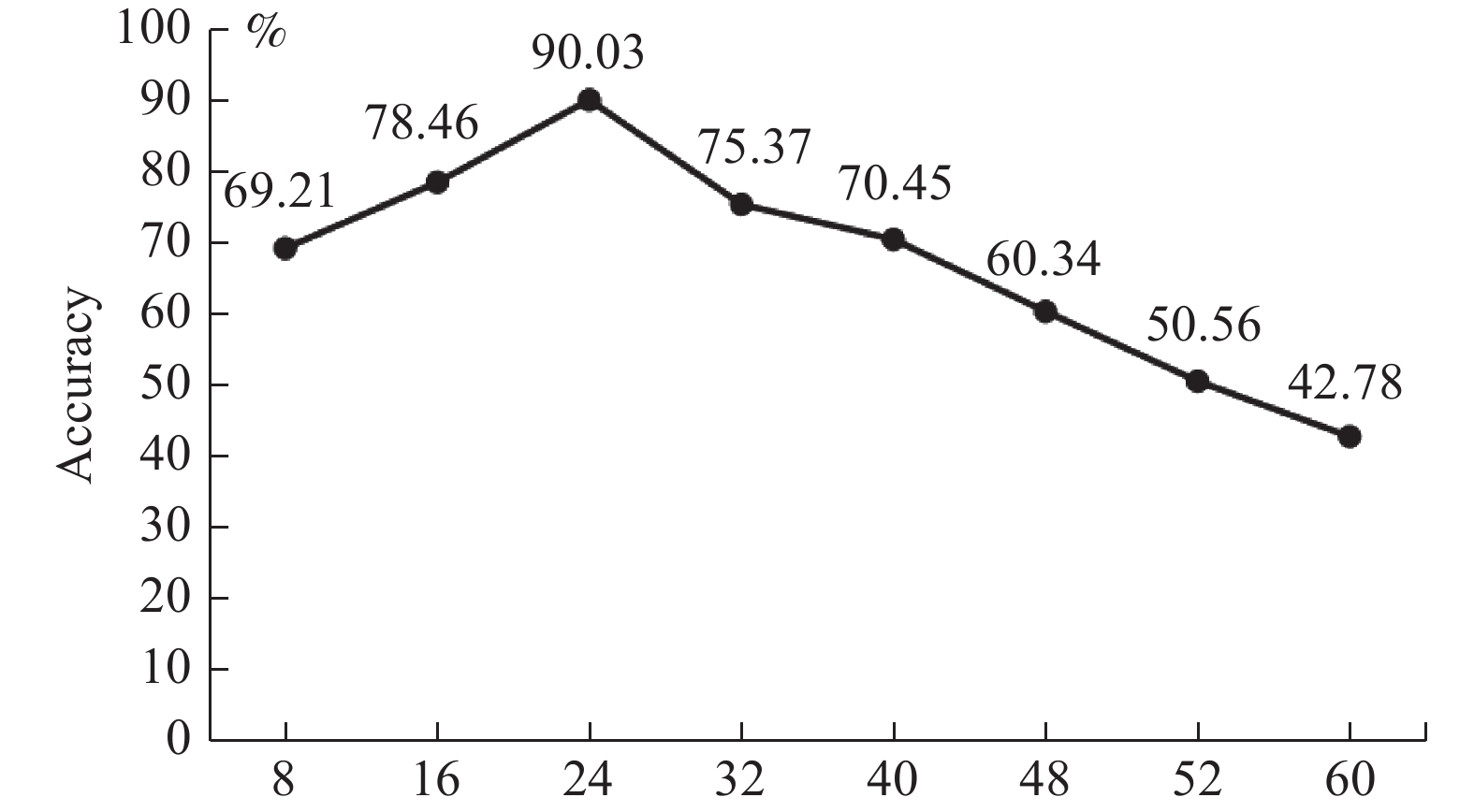
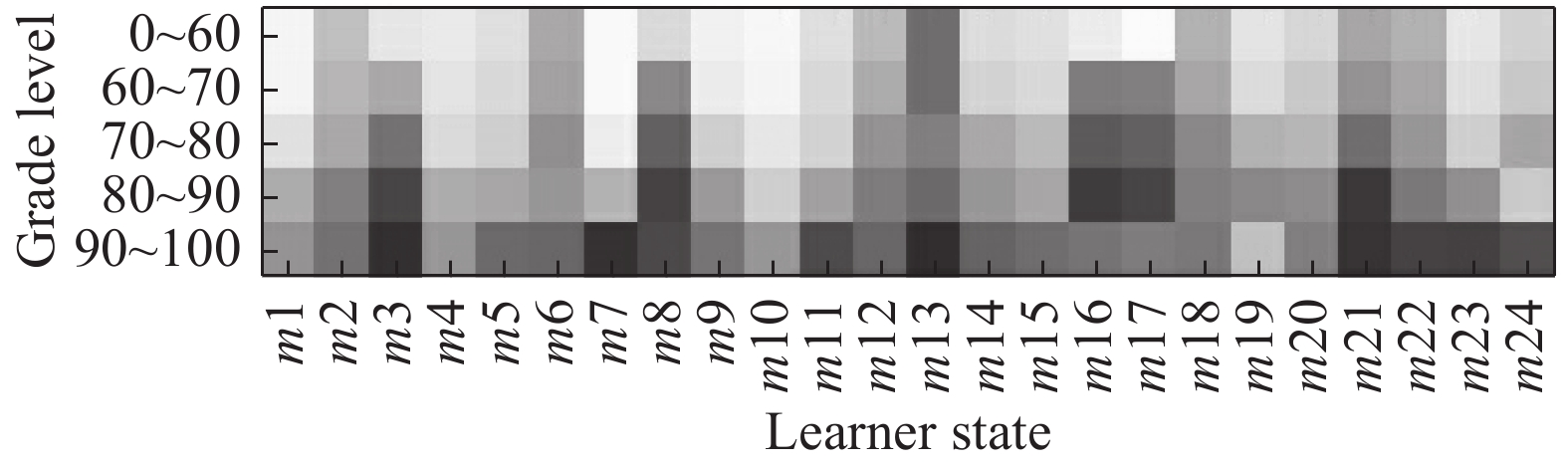
当前利用短文本情感信息进行在线学习成绩预测的研究存在以下问题: 1)当前情感分类模型无法有效适应在线学习社区的短文本特征, 分类效果较差; 2)利用短文本情感信息定量预测在线学习成绩的研究在准确性上还有较大的提升空间. 针对以上问题, 本文提出了一种短文本情感增强的成绩预测方法. 首先, 从单词和句子层面建模短文本语义, 并提出基于学习者特征的注意力机制以识别不同学习者的语言表达特点, 得到情感概率分布向量; 其次, 将情感信息与统计、学习行为信息相融合, 并基于长短时记忆网络建模学习者的学习状态; 最后, 基于学习状态预测学习者成绩. 在三种不同类别课程组成的真实数据集上进行了实验, 结果表明本文方法能有效对学习社区短文本进行情感分类, 且能够提升在线学习者成绩预测的准确性. 同时, 结合实例分析说明了情感信息、学习状态与成绩之间的关联.
当前利用短文本情感信息进行在线学习成绩预测的研究存在以下问题: 1)当前情感分类模型无法有效适应在线学习社区的短文本特征, 分类效果较差; 2)利用短文本情感信息定量预测在线学习成绩的研究在准确性上还有较大的提升空间. 针对以上问题, 本文提出了一种短文本情感增强的成绩预测方法. 首先, 从单词和句子层面建模短文本语义, 并提出基于学习者特征的注意力机制以识别不同学习者的语言表达特点, 得到情感概率分布向量; 其次, 将情感信息与统计、学习行为信息相融合, 并基于长短时记忆网络建模学习者的学习状态; 最后, 基于学习状态预测学习者成绩. 在三种不同类别课程组成的真实数据集上进行了实验, 结果表明本文方法能有效对学习社区短文本进行情感分类, 且能够提升在线学习者成绩预测的准确性. 同时, 结合实例分析说明了情感信息、学习状态与成绩之间的关联.

2020, 46(9): 1941-1951.
doi: 10.16383/j.aas.c190027
cstr: 32138.14.j.aas.c190027
摘要:
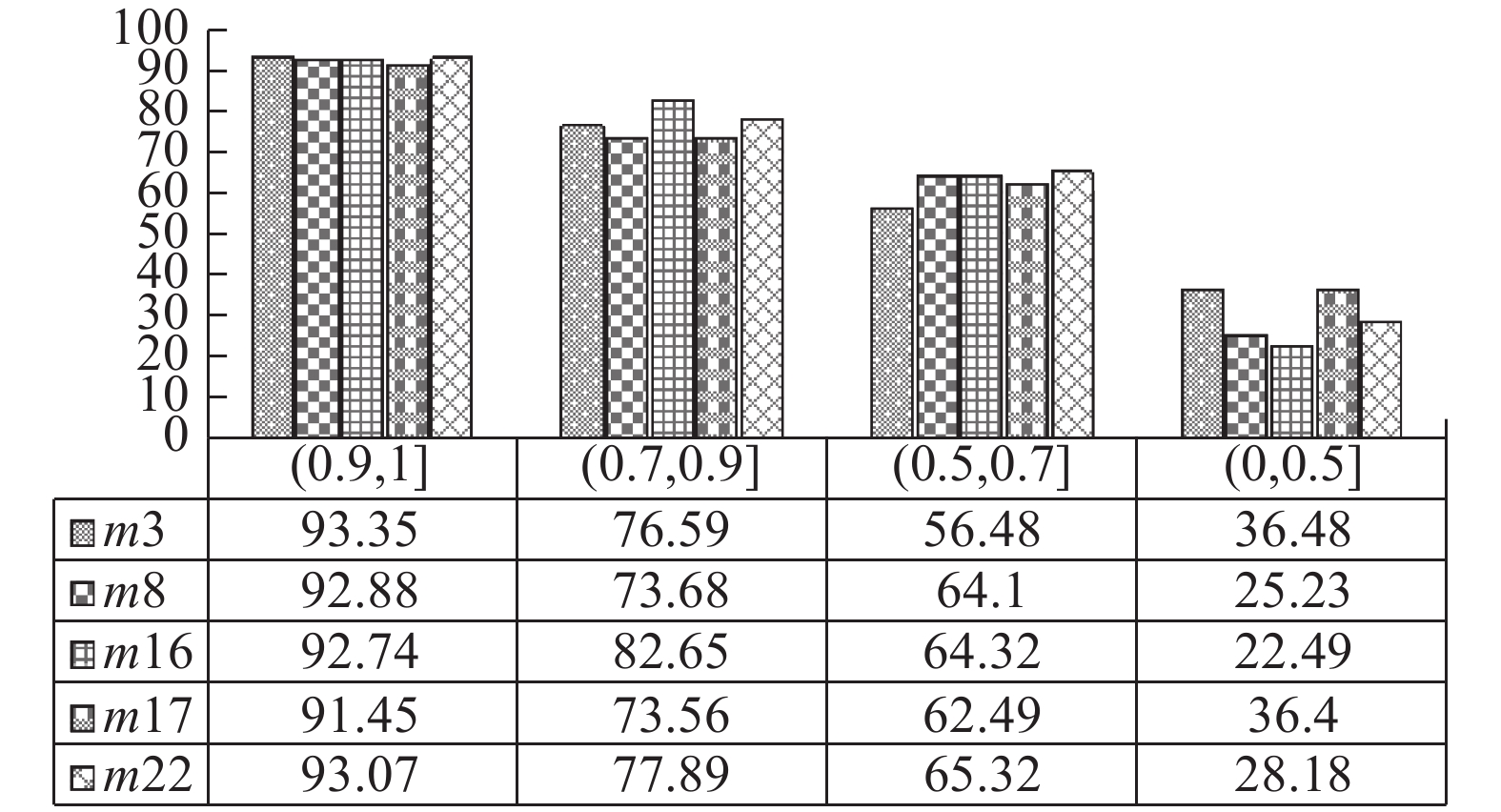
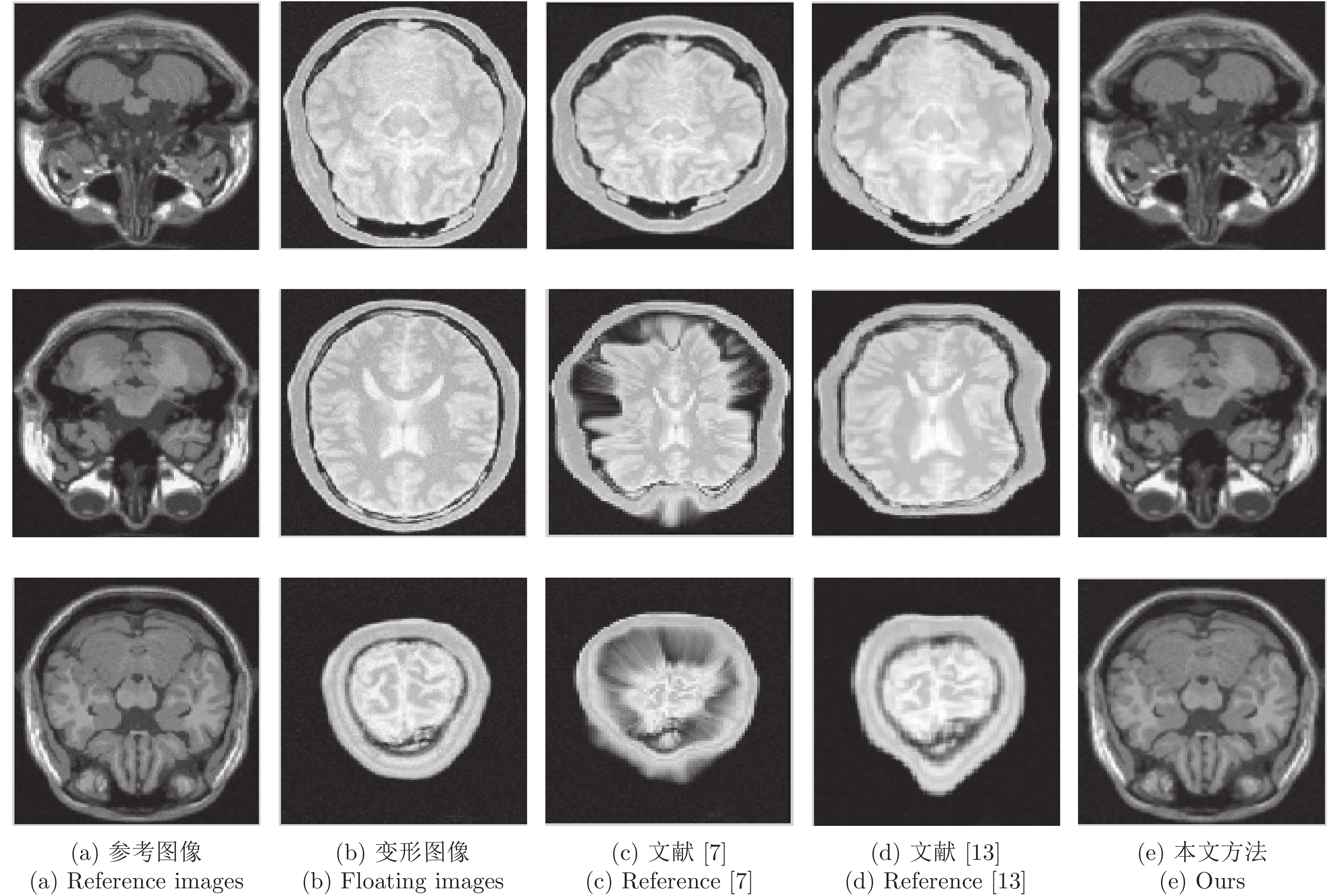
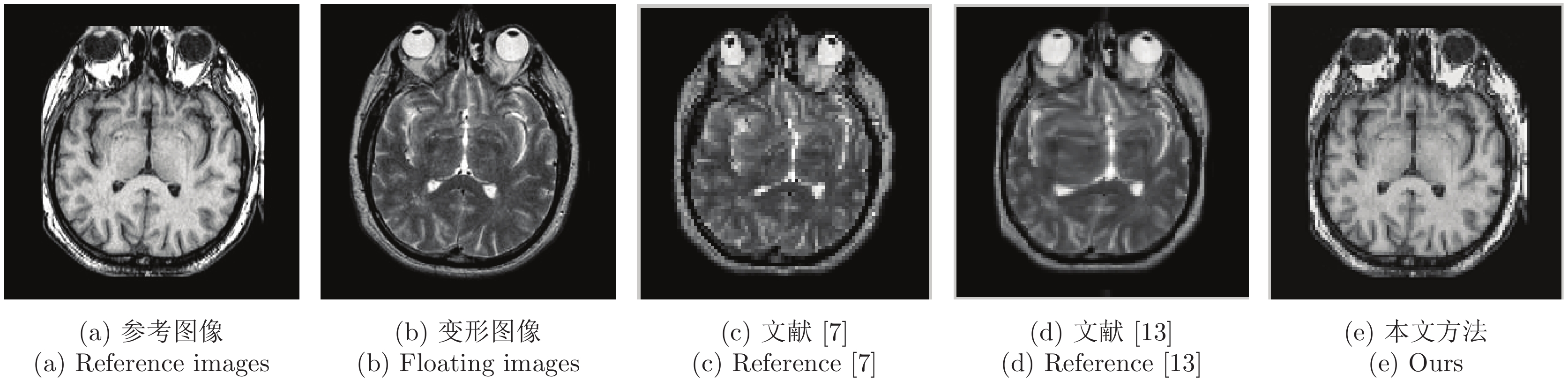
现有的医学图像配准算法对于灰度均匀、弱边缘以及弱纹理图像易陷入局部最优从而导致配准精度低下、收敛速度缓慢. 分数阶主动Demons (Fractional active Demons, FAD)算法是解决该问题的有效方法, 并且适用于图像的非刚性配准. 但FAD中的最佳分数阶阶次是人工交互选取, 并且对整幅图像都是固定不变的. 为了解决该问题, 提出一种阶次自适应的主动Demons算法并将其应用到医学图像的非刚性配准中. 算法首先根据图像的局部特征建立分数阶阶次自适应的数学模型, 并逐像素计算最优阶次, 基于该阶次构造Riemann-Liouvill (R-L)分数阶微分动态模板; 然后将自适应R-L分数阶微分引入到Active Demons算法, 在一定程度上缓解了图像配准在弱边缘和弱纹理区域易陷入局部最优问题, 从而提高了配准精度. 通过在两个医学图像库上进行实验验证, 实验结果表明该方法可以处理灰度均匀、弱纹理和弱边缘的医学图像非刚性配准, 配准精度得到较大提升.
现有的医学图像配准算法对于灰度均匀、弱边缘以及弱纹理图像易陷入局部最优从而导致配准精度低下、收敛速度缓慢. 分数阶主动Demons (Fractional active Demons, FAD)算法是解决该问题的有效方法, 并且适用于图像的非刚性配准. 但FAD中的最佳分数阶阶次是人工交互选取, 并且对整幅图像都是固定不变的. 为了解决该问题, 提出一种阶次自适应的主动Demons算法并将其应用到医学图像的非刚性配准中. 算法首先根据图像的局部特征建立分数阶阶次自适应的数学模型, 并逐像素计算最优阶次, 基于该阶次构造Riemann-Liouvill (R-L)分数阶微分动态模板; 然后将自适应R-L分数阶微分引入到Active Demons算法, 在一定程度上缓解了图像配准在弱边缘和弱纹理区域易陷入局部最优问题, 从而提高了配准精度. 通过在两个医学图像库上进行实验验证, 实验结果表明该方法可以处理灰度均匀、弱纹理和弱边缘的医学图像非刚性配准, 配准精度得到较大提升.


2020, 46(9): 1952-1960.
doi: 10.16383/j.aas.c190294
cstr: 32138.14.j.aas.c190294
摘要:
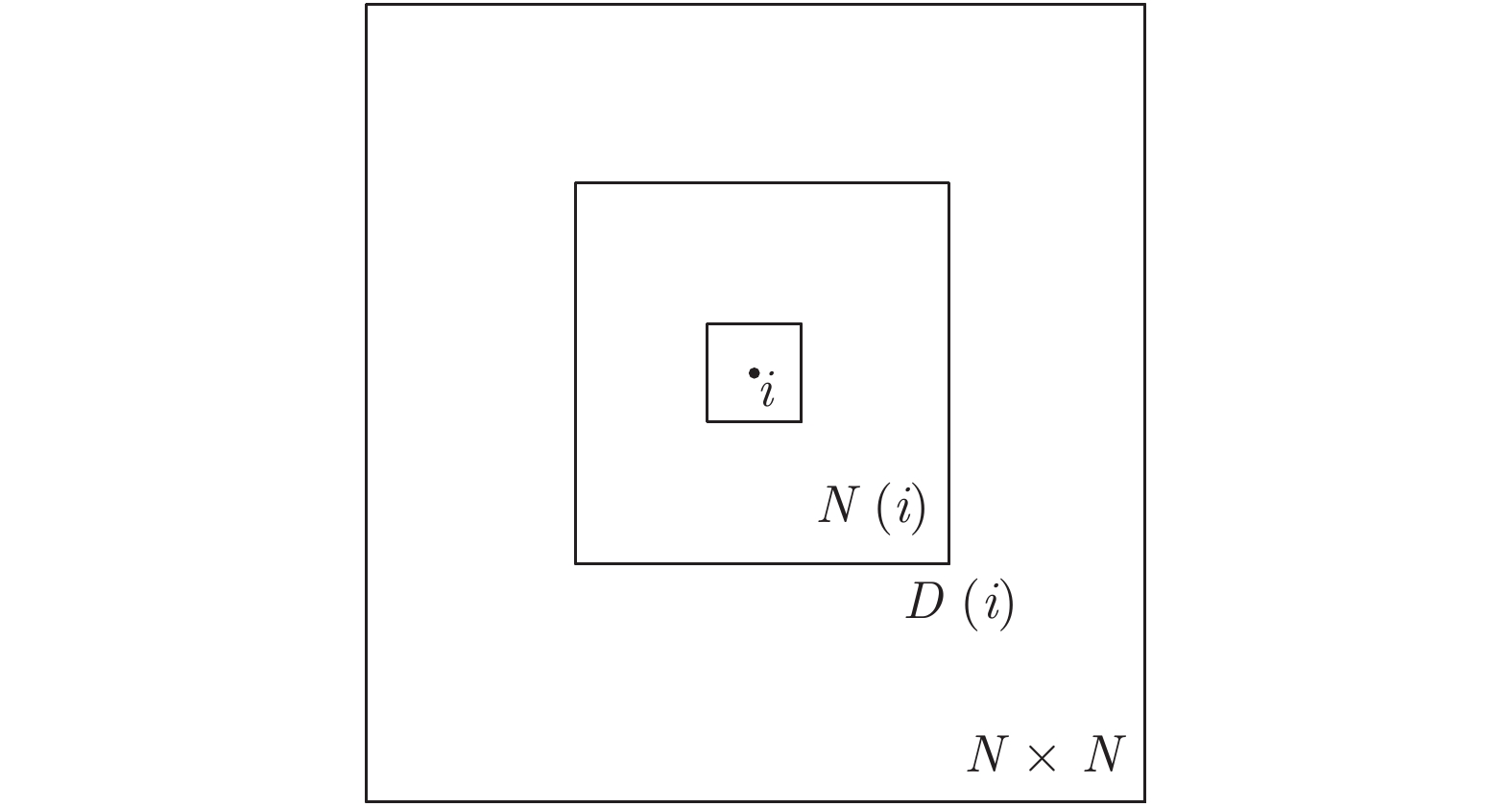
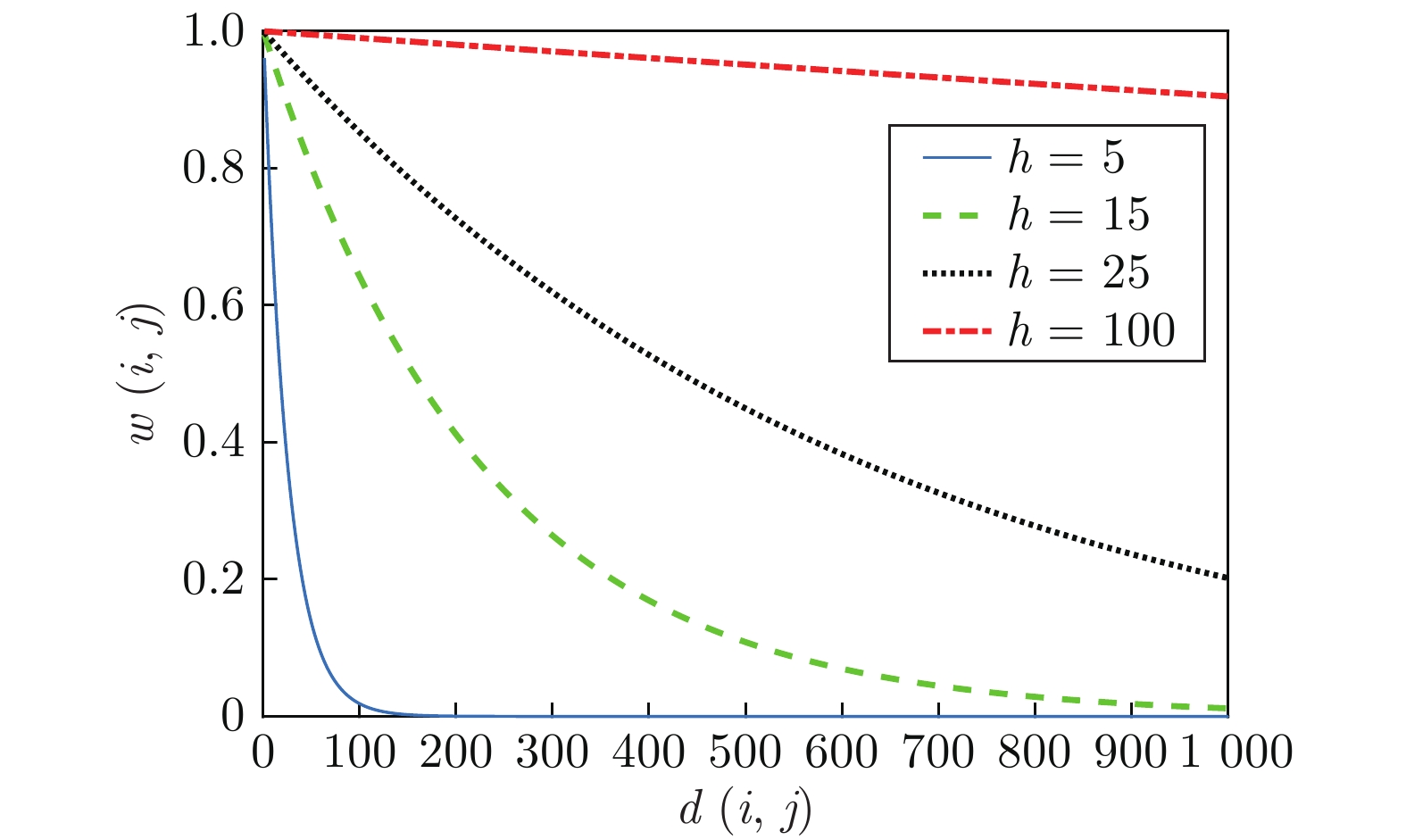
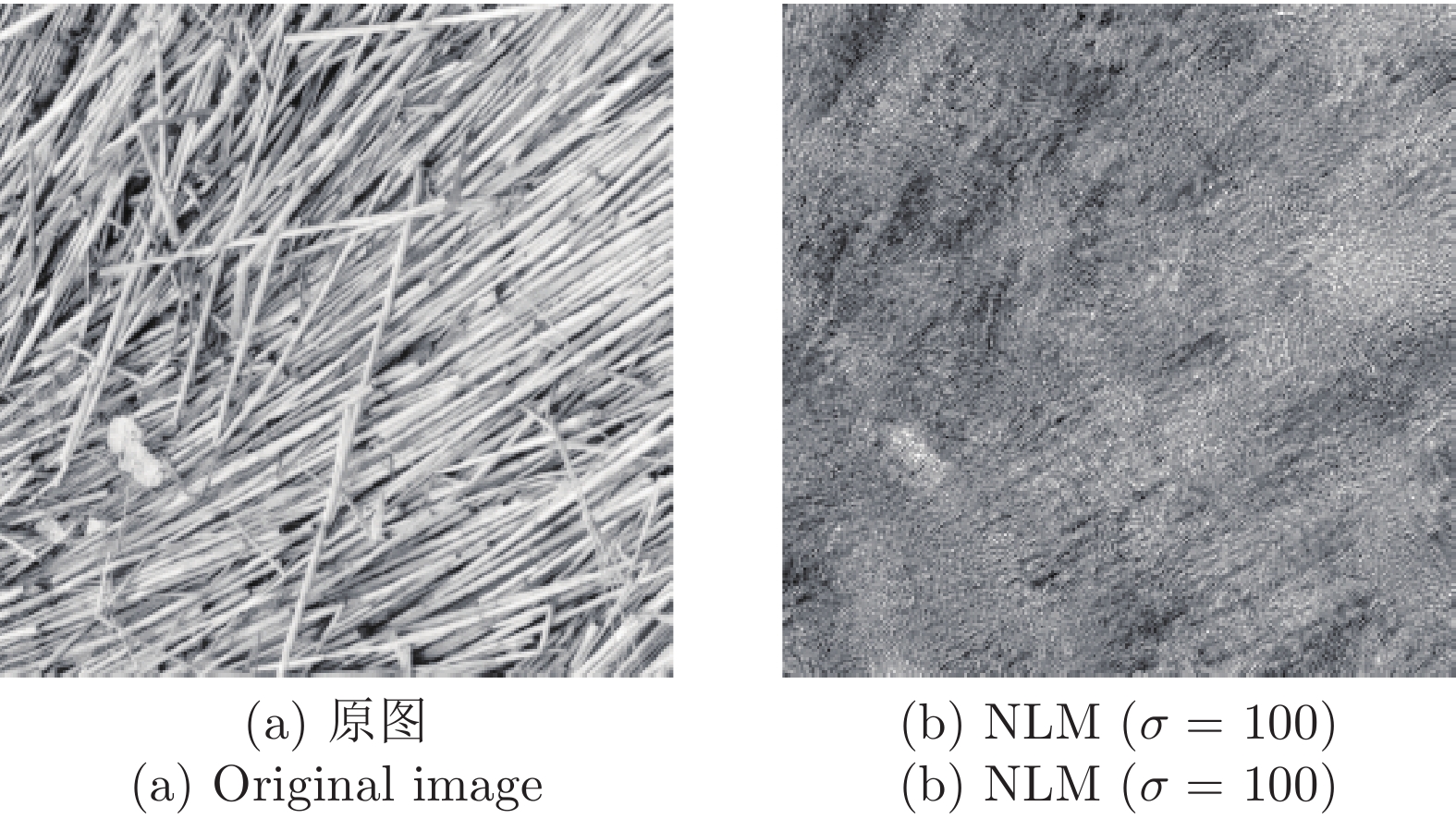
非局部平均去噪算法(Non-local means denoising algorithm, NLM)是图像处理领域具有里程碑意义的算法, NLM的提出开启了影响深远的非局部方法. 本文从以下两个方面来重新探讨非局部平均算法: 1) 针对NLM算法运算复杂度高的问题, 基于互相关(Cross-correlation, CC)和快速傅里叶变换(Fast Fourier transformation, FFT)构造了一种快速算法; 2) NLM在滤除噪声的同时会模糊图像结构信息, 在强噪声条件下更是如此. 针对这一问题, 提出了一种渐近非局部平均图像去噪算法, 该算法利用方差的性质来控制滤波参数. 数值实验表明, 快速算法较之经典算法, 在标准参数配置下运行速度可提高27倍左右; 渐近非局部平均图像去噪算法较之经典非局部平均图像去噪算法, 去噪效果显著改善.
非局部平均去噪算法(Non-local means denoising algorithm, NLM)是图像处理领域具有里程碑意义的算法, NLM的提出开启了影响深远的非局部方法. 本文从以下两个方面来重新探讨非局部平均算法: 1) 针对NLM算法运算复杂度高的问题, 基于互相关(Cross-correlation, CC)和快速傅里叶变换(Fast Fourier transformation, FFT)构造了一种快速算法; 2) NLM在滤除噪声的同时会模糊图像结构信息, 在强噪声条件下更是如此. 针对这一问题, 提出了一种渐近非局部平均图像去噪算法, 该算法利用方差的性质来控制滤波参数. 数值实验表明, 快速算法较之经典算法, 在标准参数配置下运行速度可提高27倍左右; 渐近非局部平均图像去噪算法较之经典非局部平均图像去噪算法, 去噪效果显著改善.



2020, 46(9): 1961-1970.
doi: 10.16383/j.aas.c180848
cstr: 32138.14.j.aas.c180848
摘要:
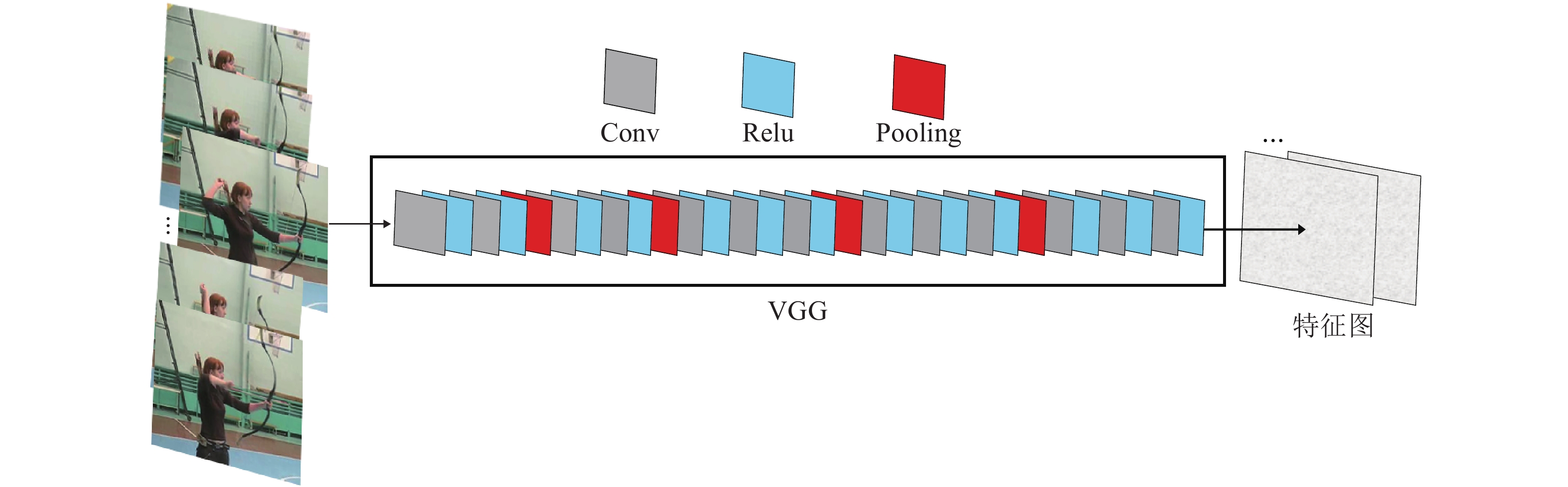
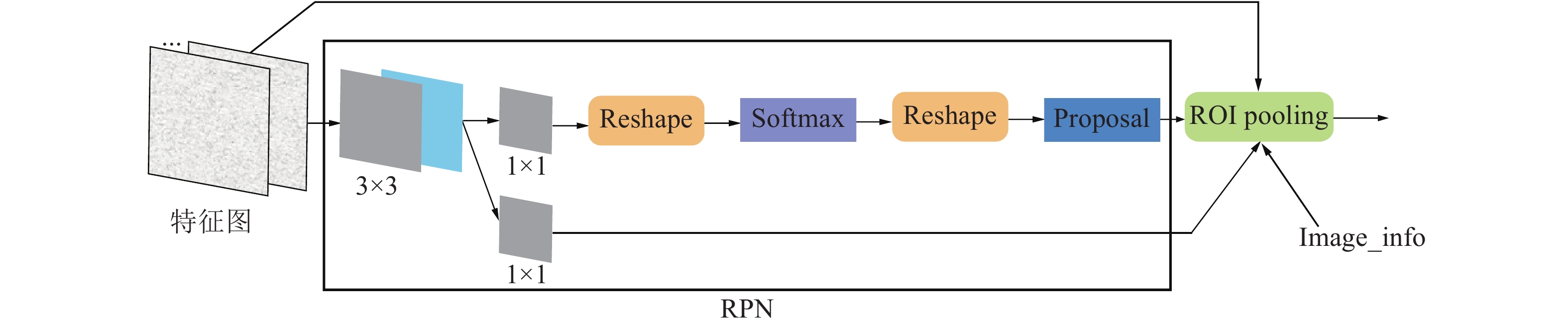
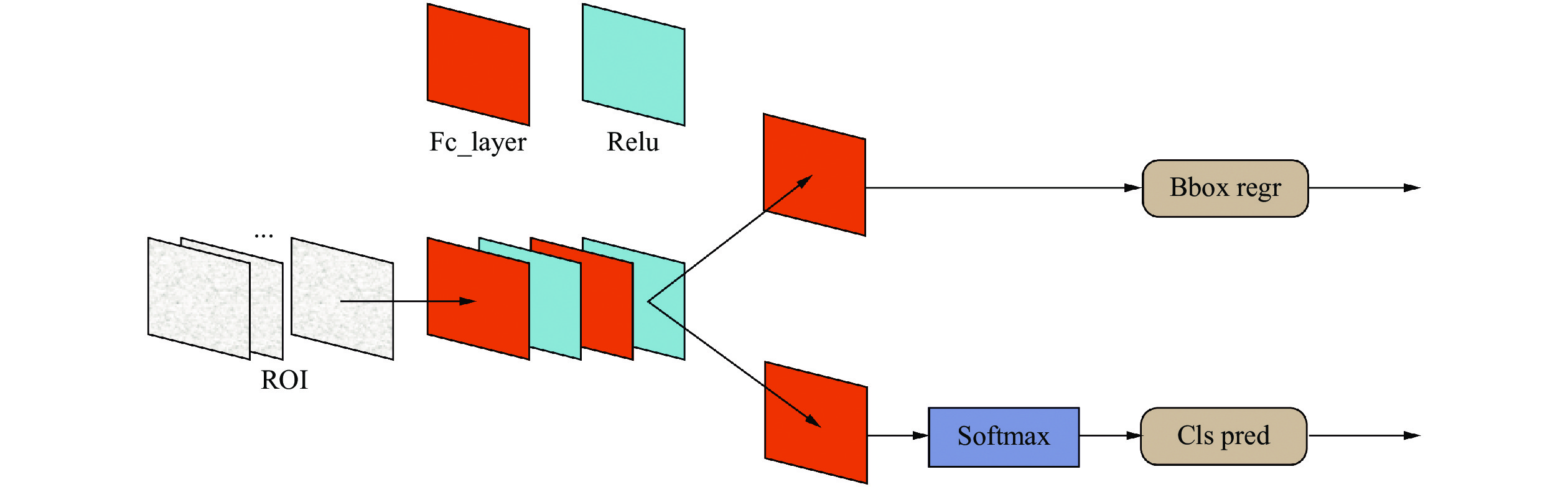
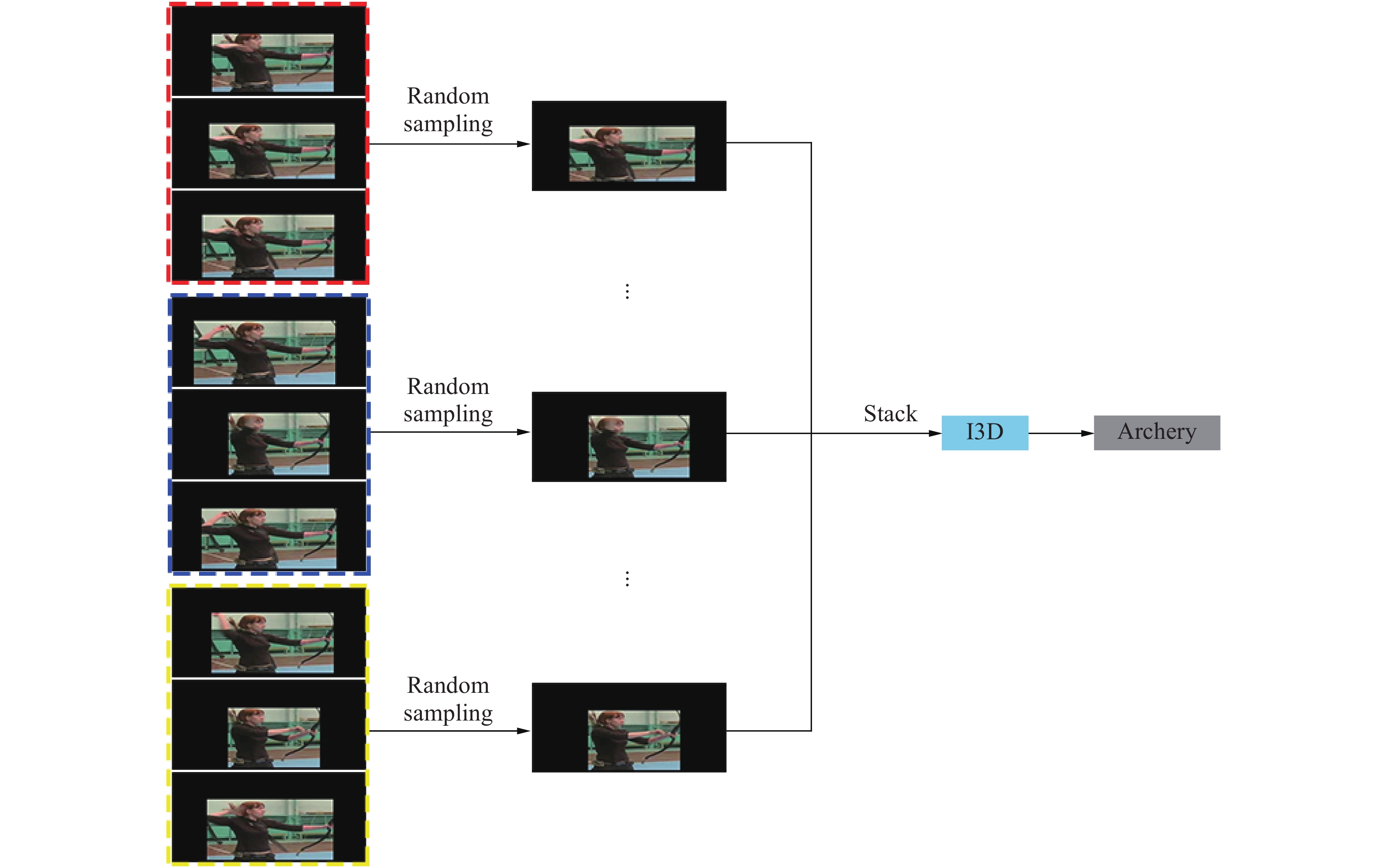
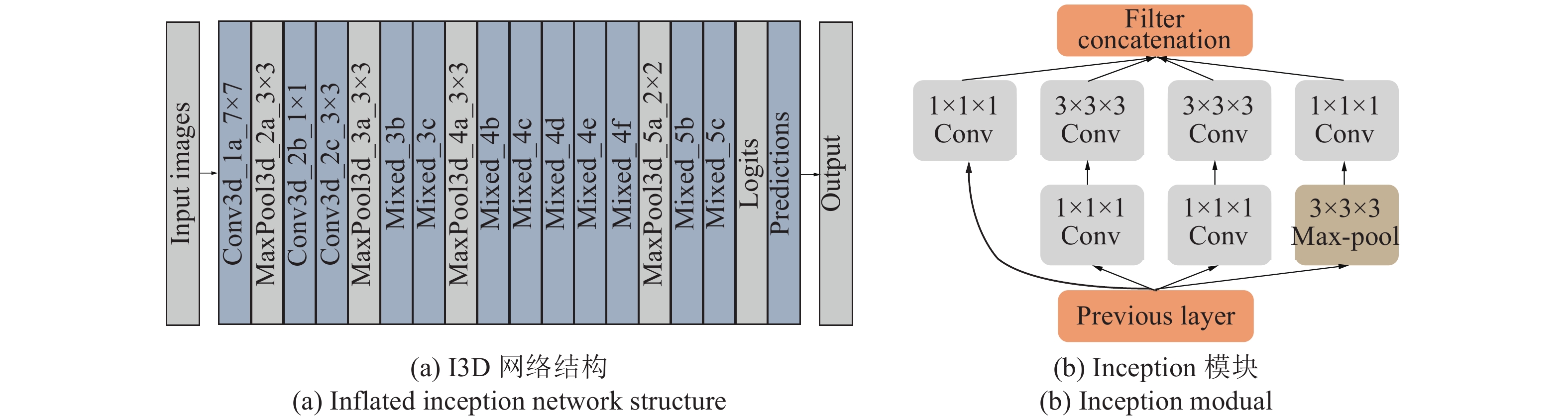
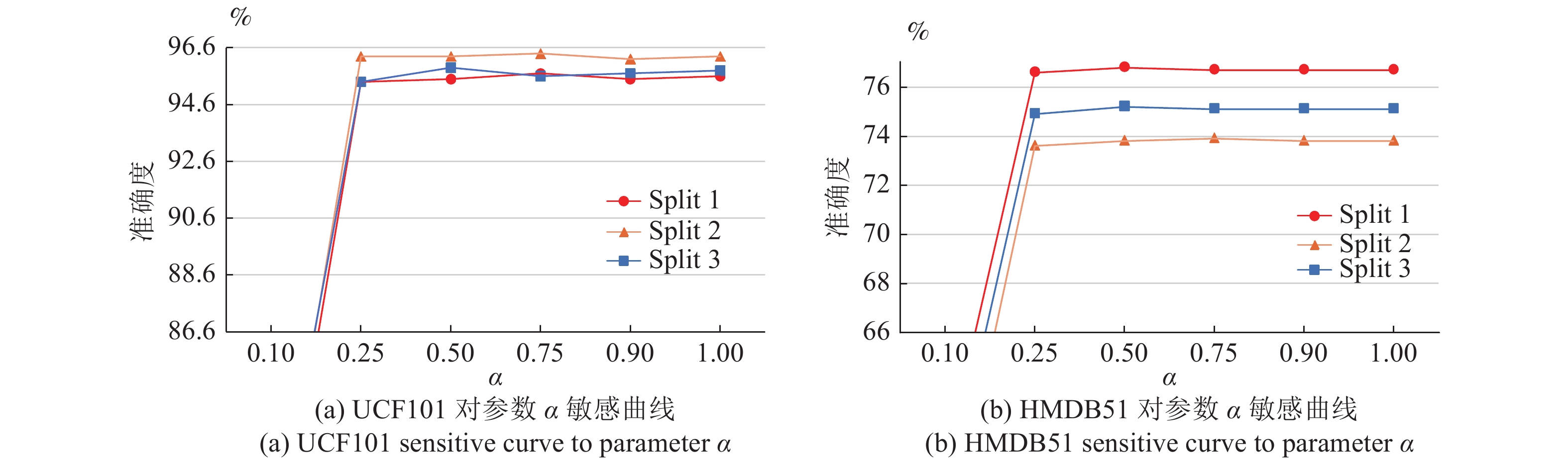
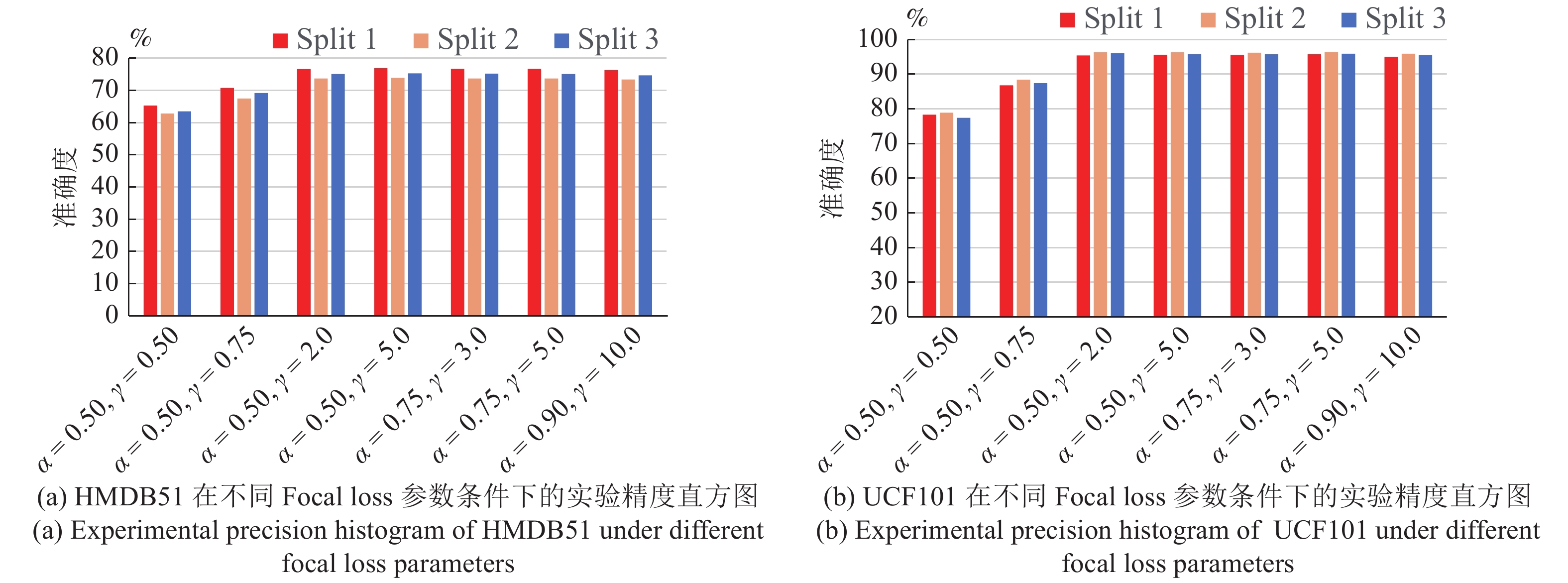
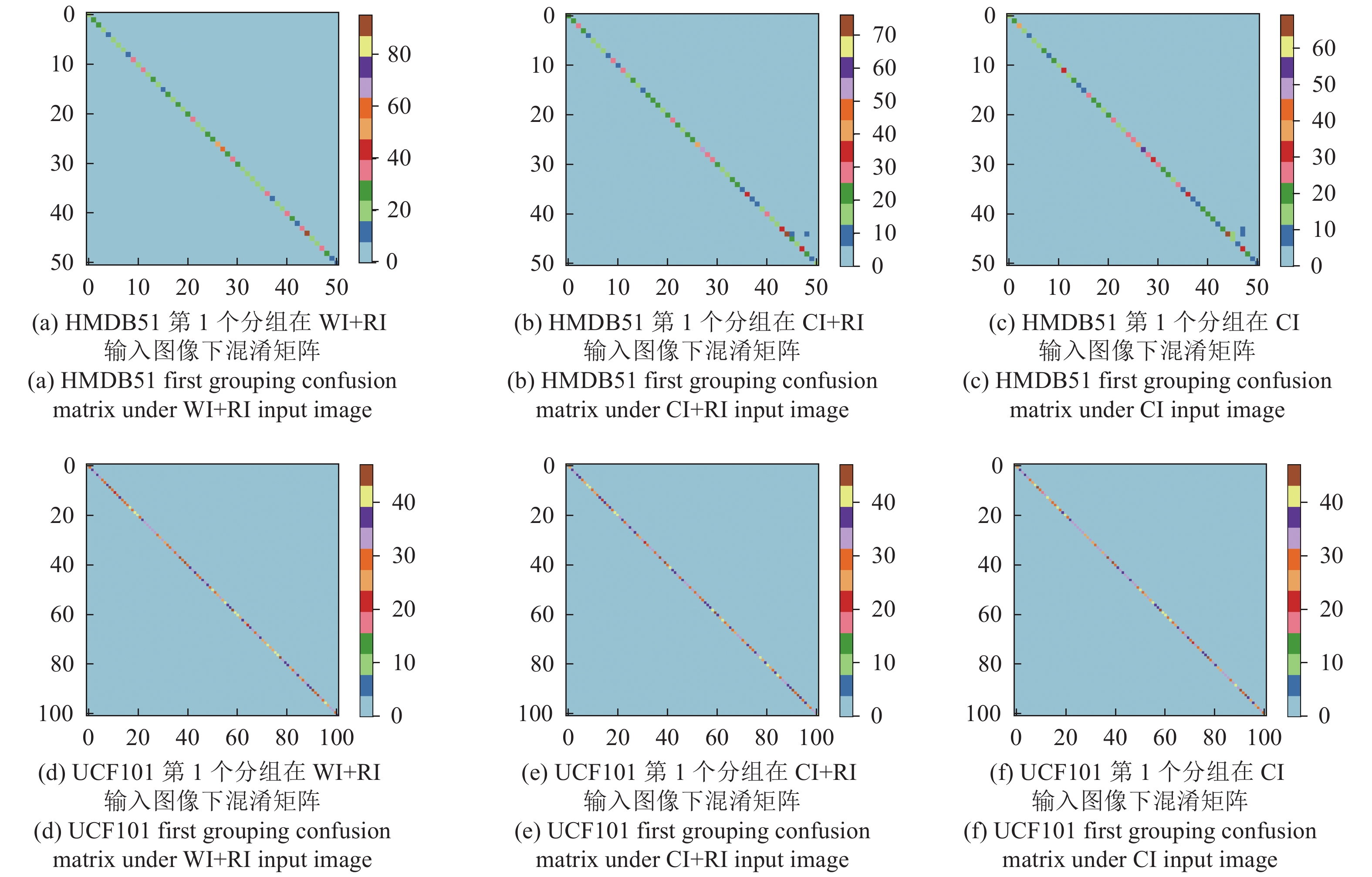
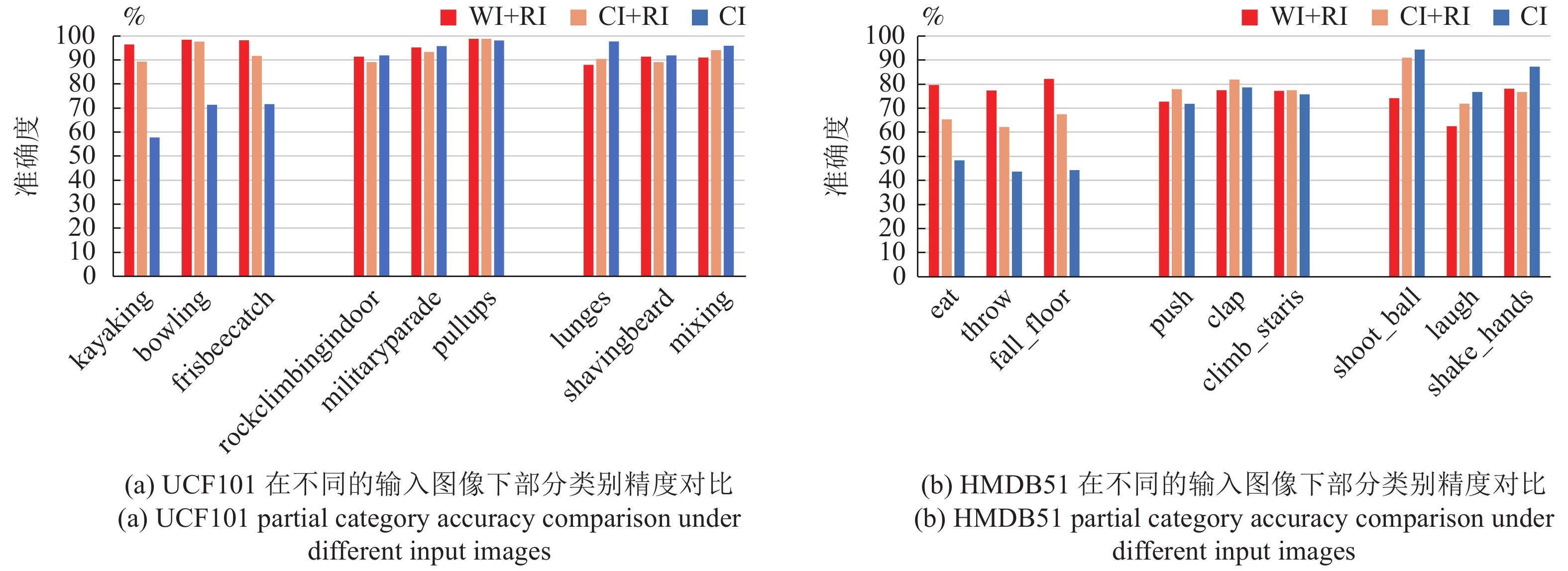
人体行为识别领域的研究方法大多数是从原始视频帧中提取相关特征, 这些方法或多或少地引入了多余的背景信息, 从而给神经网络带来了较大的噪声. 为了解决背景信息干扰、视频帧存在的大量冗余信息、样本分类不均衡及个别类分类难的问题, 本文提出一种新的结合目标检测的人体行为识别的算法. 首先, 在人体行为识别的过程中增加目标检测机制, 使神经网络有侧重地学习人体的动作信息; 其次, 对视频进行分段随机采样, 建立跨越整个视频段的长时时域建模; 最后, 通过改进的神经网络损失函数再进行行为识别. 本文方法在常见的人体行为识别数据集UCF101和HMDB51上进行了大量的实验分析, 人体行为识别的准确率(仅RGB图像)分别可达96.0%和75.3%, 明显高于当今主流人体行为识别算法.
人体行为识别领域的研究方法大多数是从原始视频帧中提取相关特征, 这些方法或多或少地引入了多余的背景信息, 从而给神经网络带来了较大的噪声. 为了解决背景信息干扰、视频帧存在的大量冗余信息、样本分类不均衡及个别类分类难的问题, 本文提出一种新的结合目标检测的人体行为识别的算法. 首先, 在人体行为识别的过程中增加目标检测机制, 使神经网络有侧重地学习人体的动作信息; 其次, 对视频进行分段随机采样, 建立跨越整个视频段的长时时域建模; 最后, 通过改进的神经网络损失函数再进行行为识别. 本文方法在常见的人体行为识别数据集UCF101和HMDB51上进行了大量的实验分析, 人体行为识别的准确率(仅RGB图像)分别可达96.0%和75.3%, 明显高于当今主流人体行为识别算法.

2020, 46(9): 1971-1985.
doi: 10.16383/j.aas.c190002
cstr: 32138.14.j.aas.c190002
摘要:
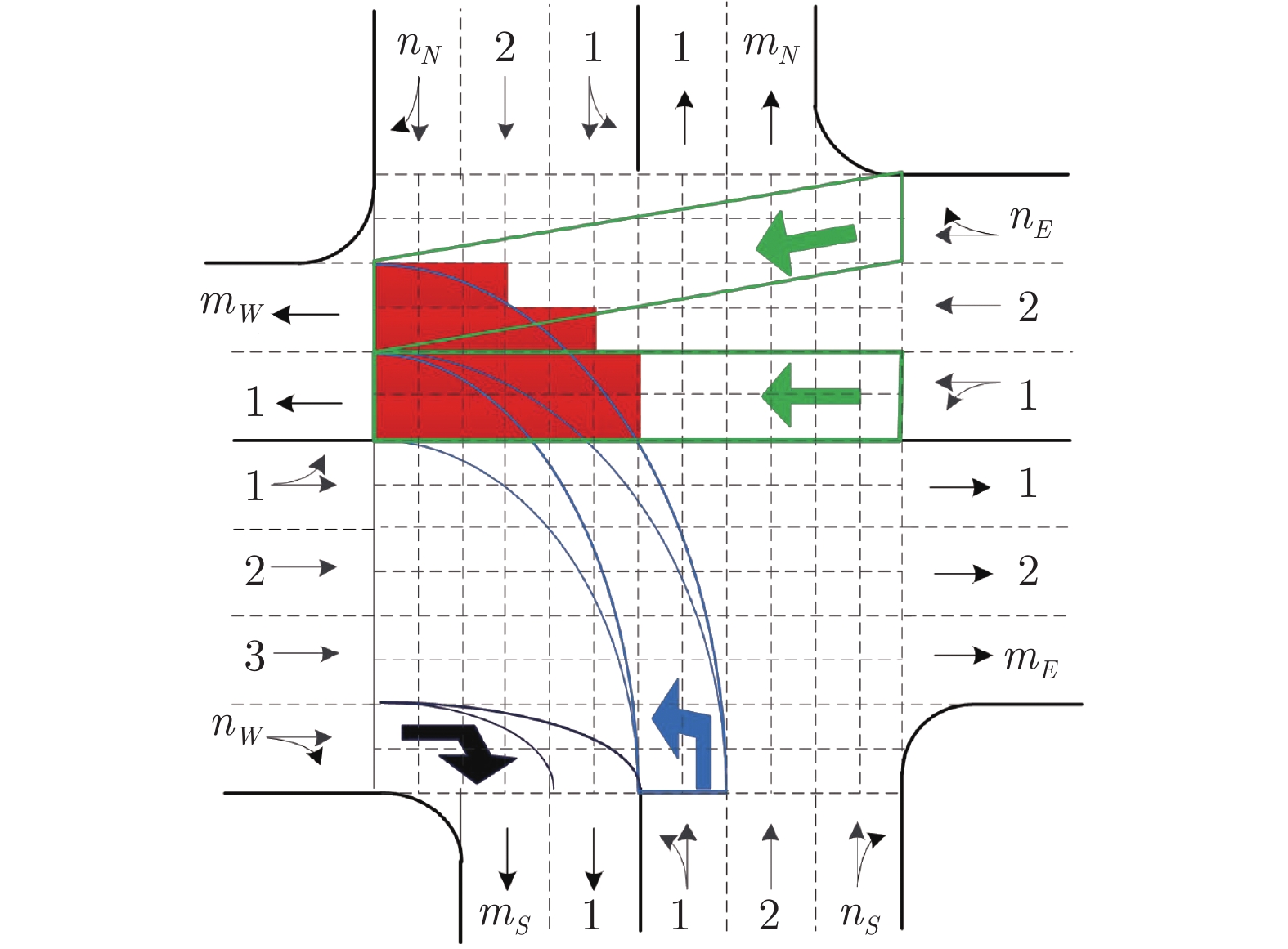
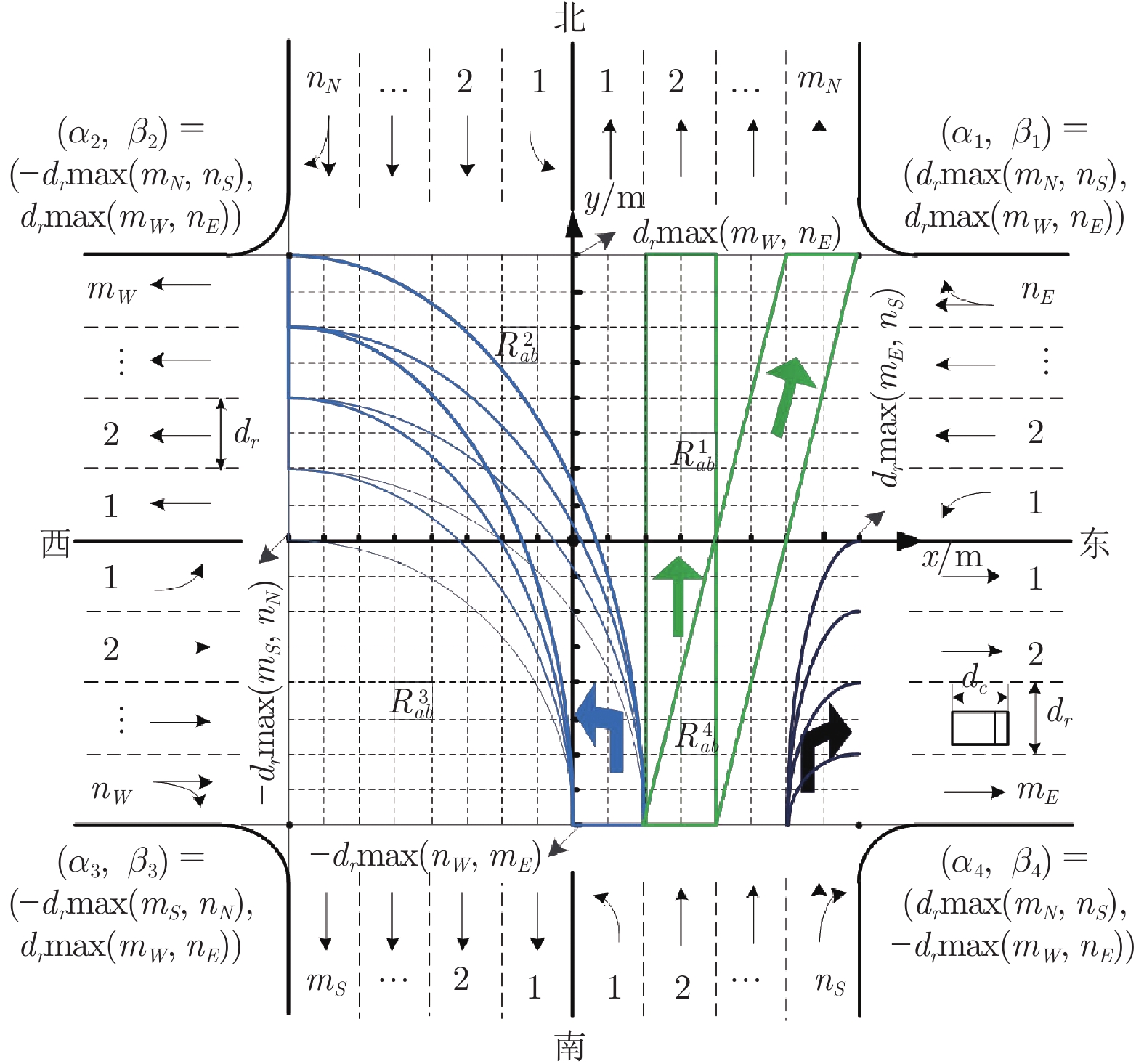
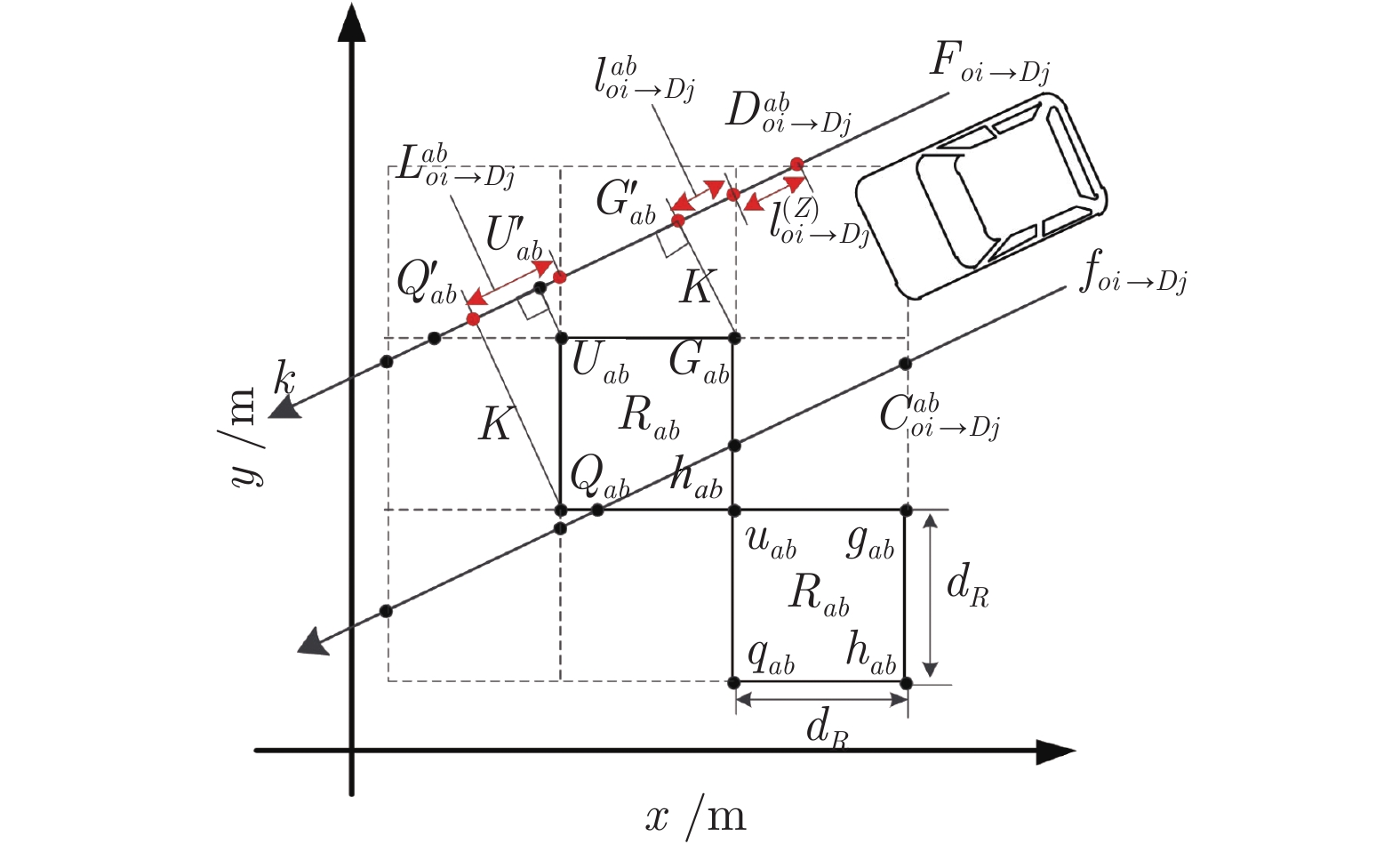
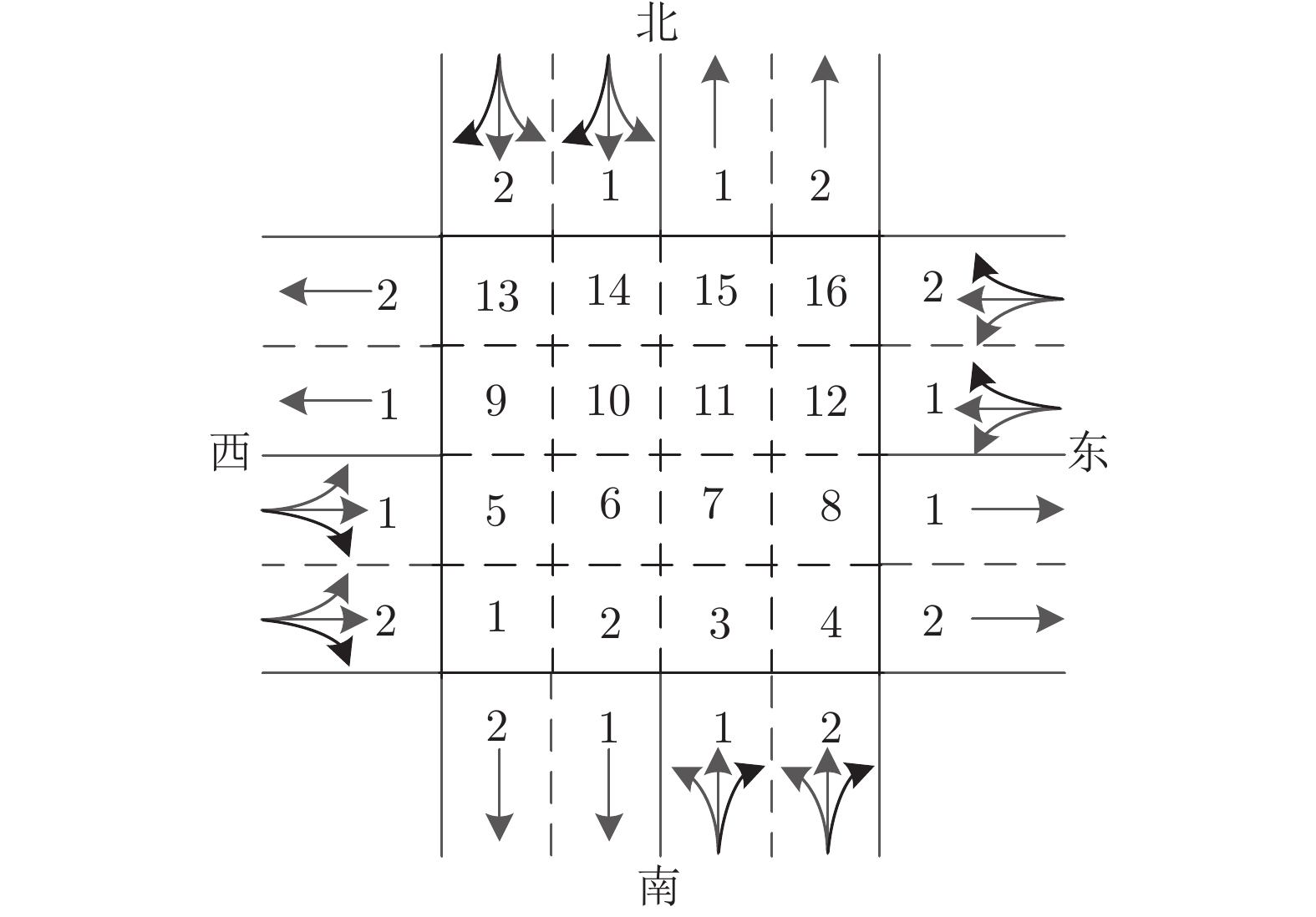
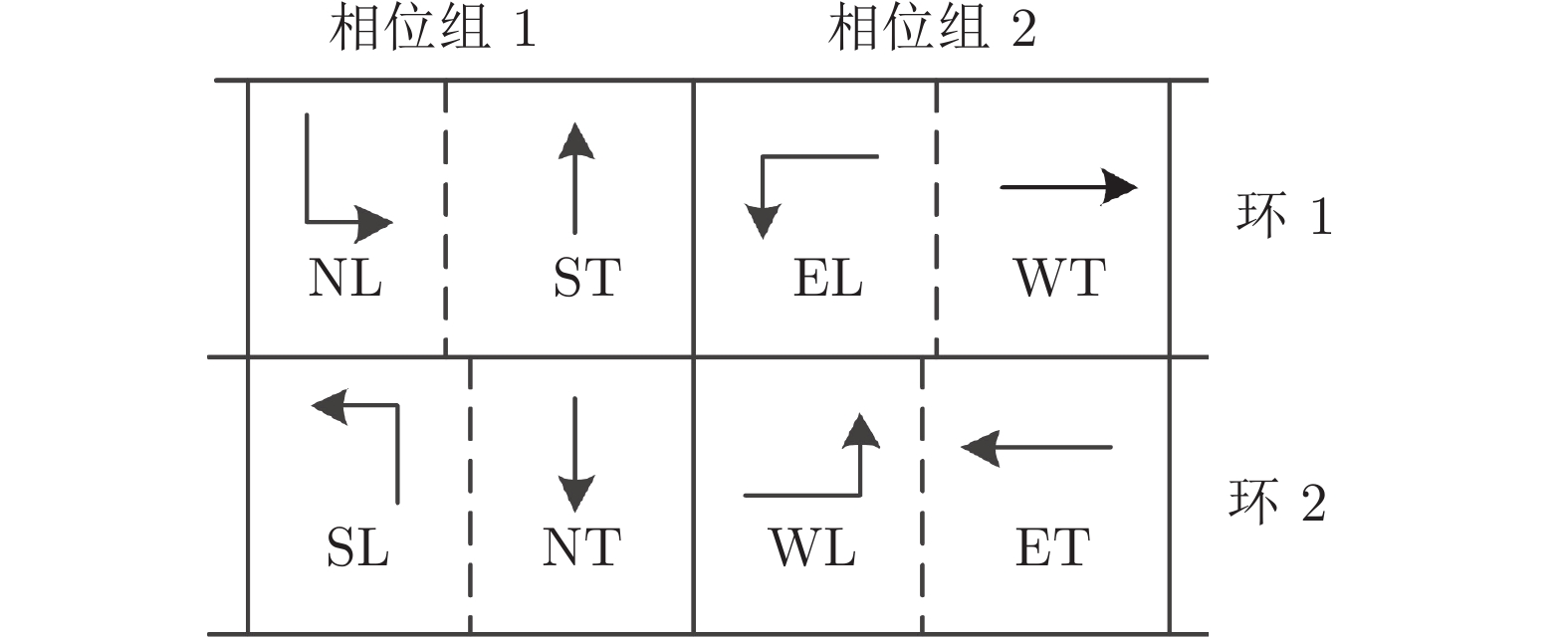
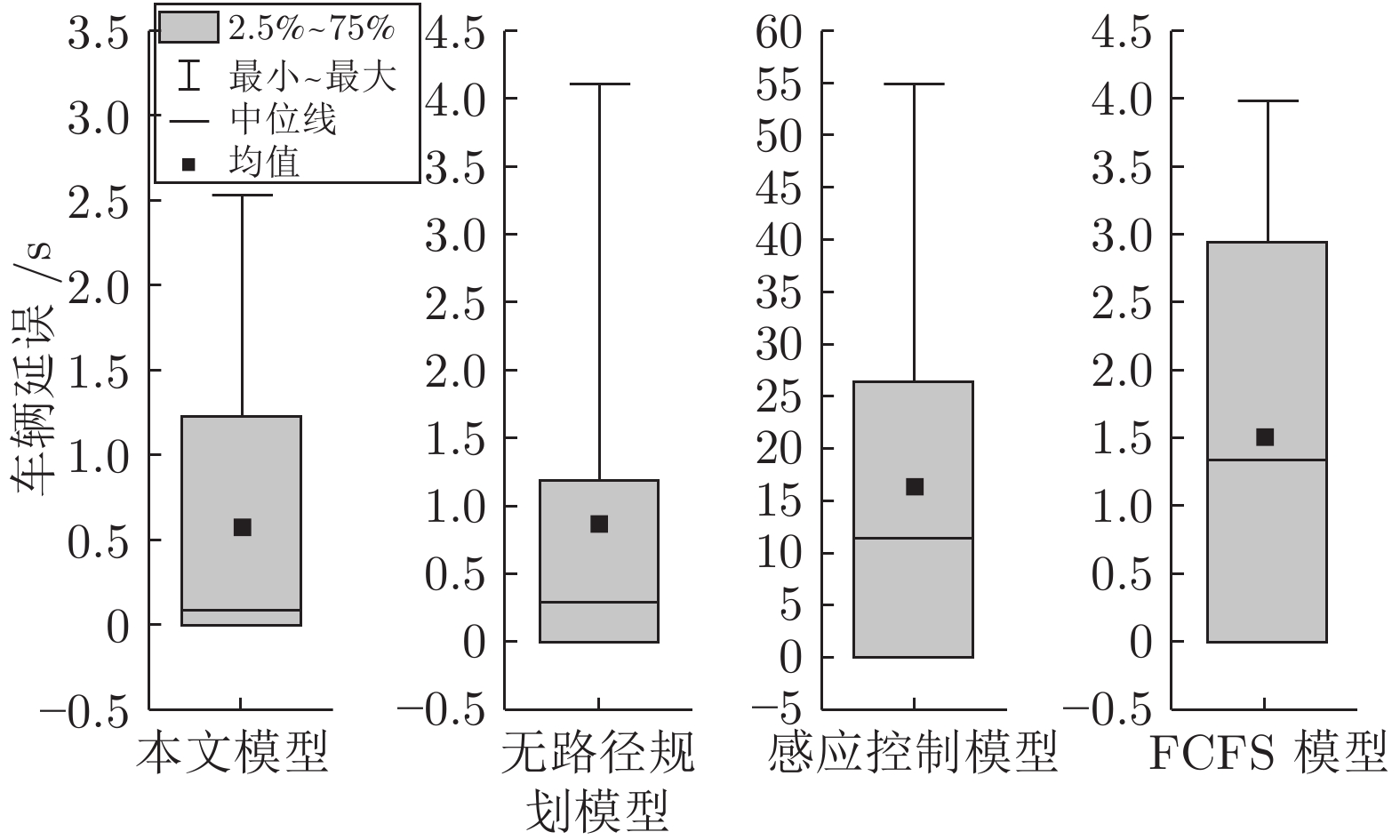
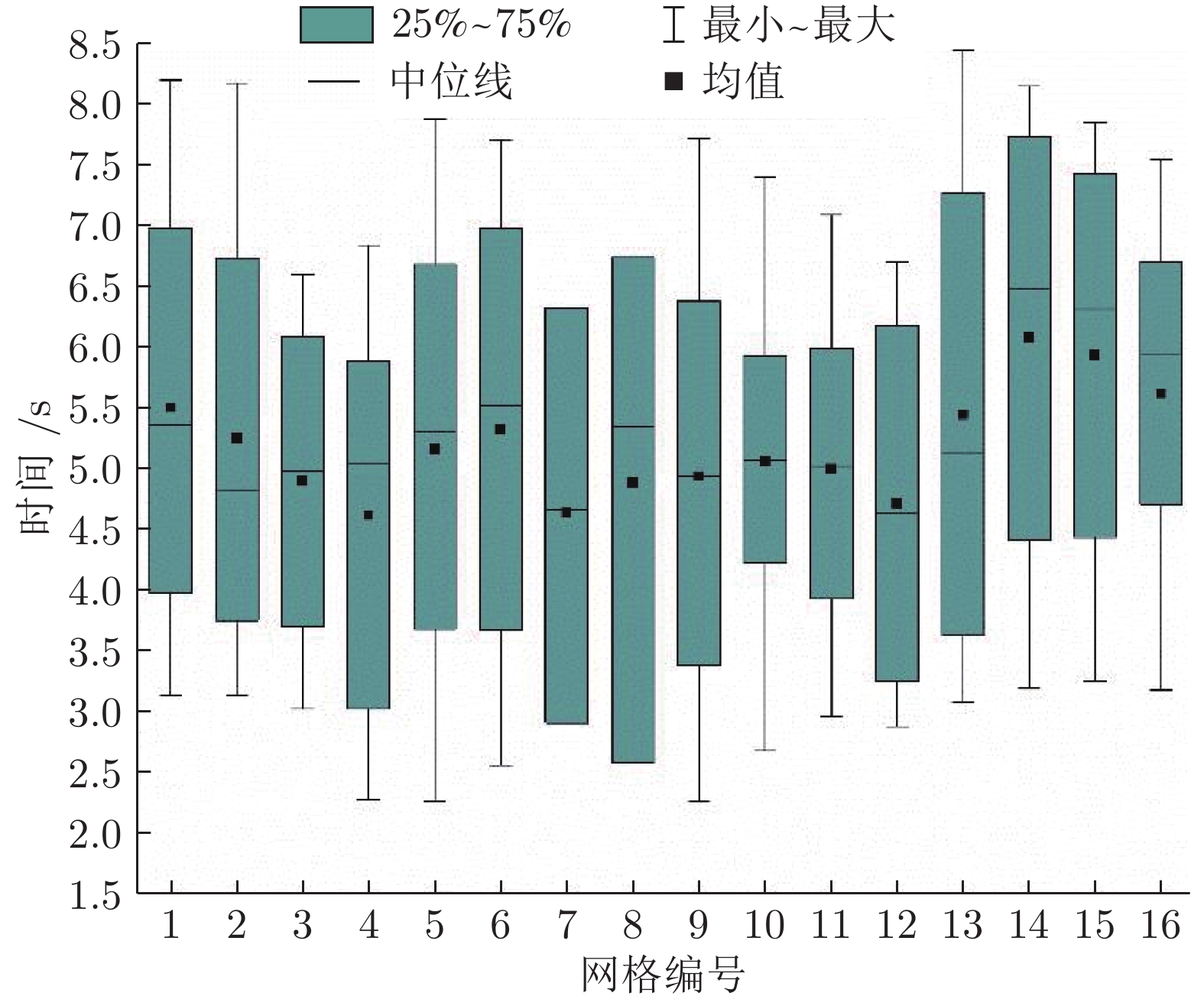
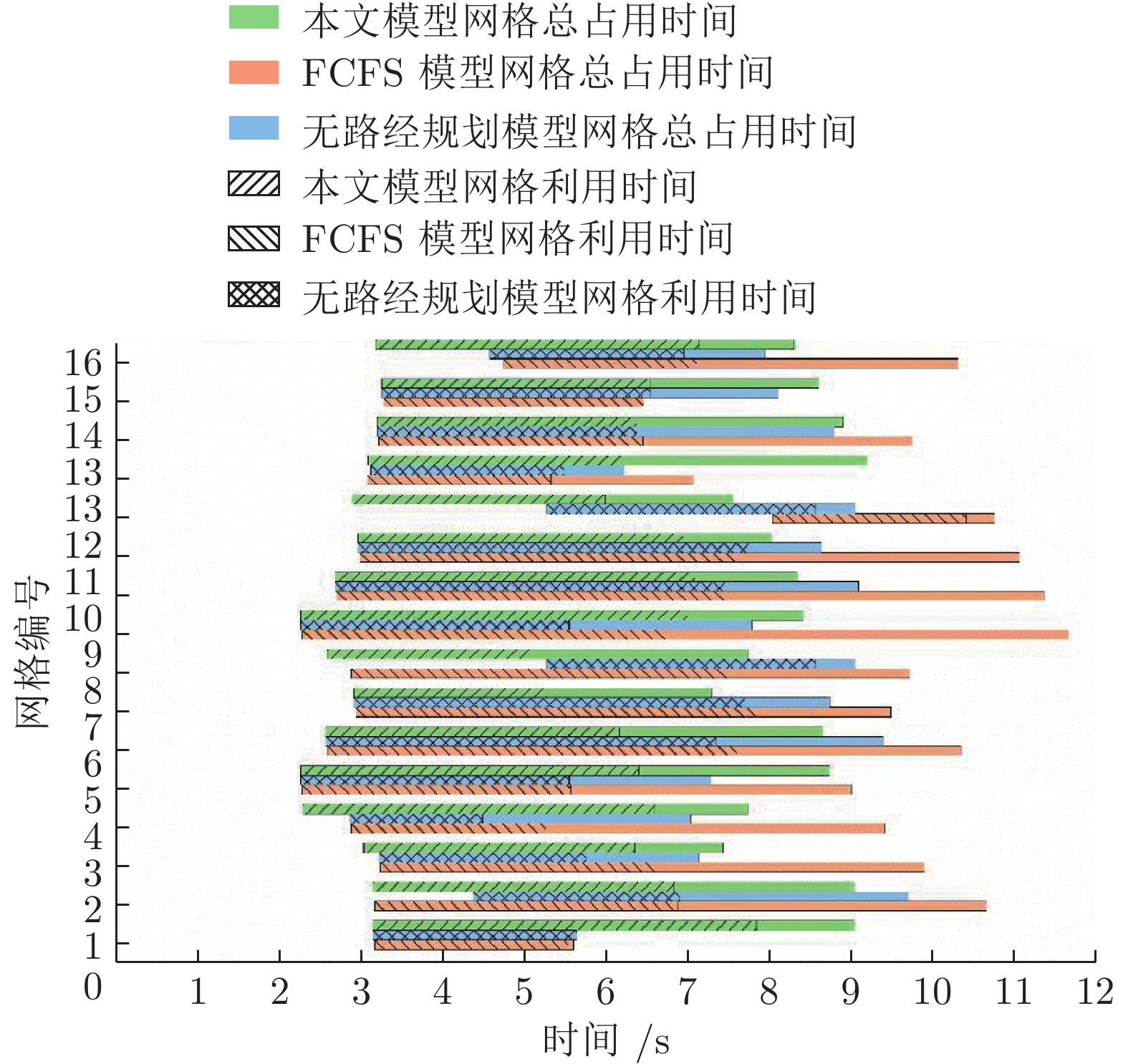
自动驾驶环境下的交叉口基于车车/车路之间的双向信息交互, 能保障自动驾驶车辆相互穿插与协作地通过交叉口, 而无需信号灯控制. 因此, 如何设计高效的面向自动驾驶车辆通行的交叉口管控模型, 已成为研究的热点. 已有研究在建模时, 均基于自动驾驶车辆在交叉口内部的行驶路径已知并作为模型输入, 且大多对交叉口内部的冲突点进行简化. 本文首先将交叉口空间离散化处理, 考虑车辆的实际尺寸并面向非常规交叉口, 使用椭圆曲线建立转弯车辆行驶路径的精确轨迹方程, 再通过外边界投影降维法建立轨迹方程和交叉口空间的映射关系. 建立了基于混合整数线性规划(Mixed integer linear programming, MILP)的自动驾驶交叉口管控模型, 以交叉口总延误最小为控制目标, 同时优化车辆在交叉口的最佳行驶路径和驶入时刻, 使用AMPL (A mathematical programming language)对模型进行编译并使用CPLEX求解器求解. 与经典感应控制和先到先服务模型进行对比, 结果表明, 本文所提出模型能对车辆进入交叉口的时刻和行驶路径进行双重优化, 显著降低自动驾驶车辆通过交叉口的车均延误, 提高交叉口空间的利用效率.
自动驾驶环境下的交叉口基于车车/车路之间的双向信息交互, 能保障自动驾驶车辆相互穿插与协作地通过交叉口, 而无需信号灯控制. 因此, 如何设计高效的面向自动驾驶车辆通行的交叉口管控模型, 已成为研究的热点. 已有研究在建模时, 均基于自动驾驶车辆在交叉口内部的行驶路径已知并作为模型输入, 且大多对交叉口内部的冲突点进行简化. 本文首先将交叉口空间离散化处理, 考虑车辆的实际尺寸并面向非常规交叉口, 使用椭圆曲线建立转弯车辆行驶路径的精确轨迹方程, 再通过外边界投影降维法建立轨迹方程和交叉口空间的映射关系. 建立了基于混合整数线性规划(Mixed integer linear programming, MILP)的自动驾驶交叉口管控模型, 以交叉口总延误最小为控制目标, 同时优化车辆在交叉口的最佳行驶路径和驶入时刻, 使用AMPL (A mathematical programming language)对模型进行编译并使用CPLEX求解器求解. 与经典感应控制和先到先服务模型进行对比, 结果表明, 本文所提出模型能对车辆进入交叉口的时刻和行驶路径进行双重优化, 显著降低自动驾驶车辆通过交叉口的车均延误, 提高交叉口空间的利用效率.


2020, 46(9): 1986-1993.
doi: 10.16383/j.aas.c180504
cstr: 32138.14.j.aas.c180504
摘要:
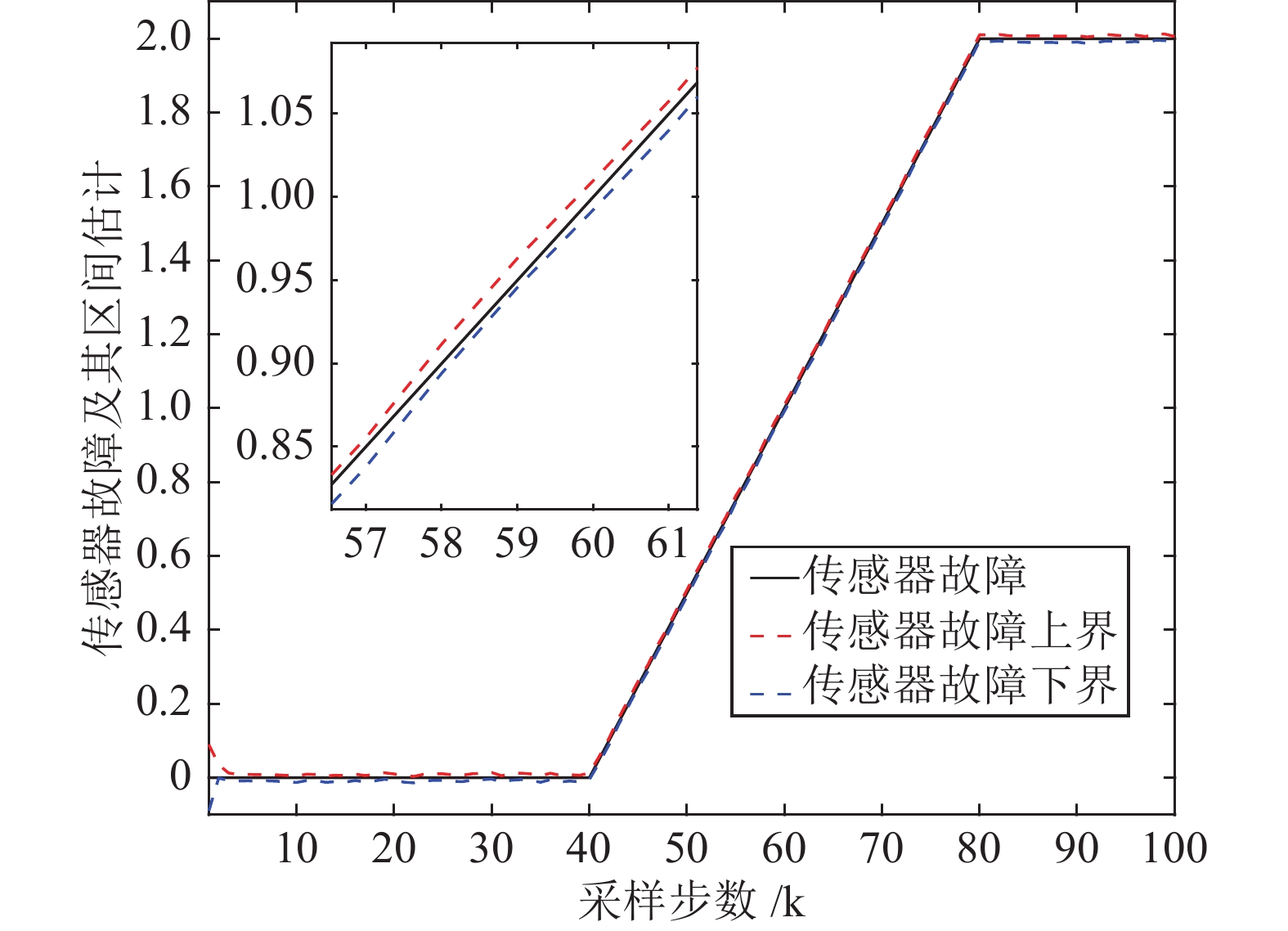
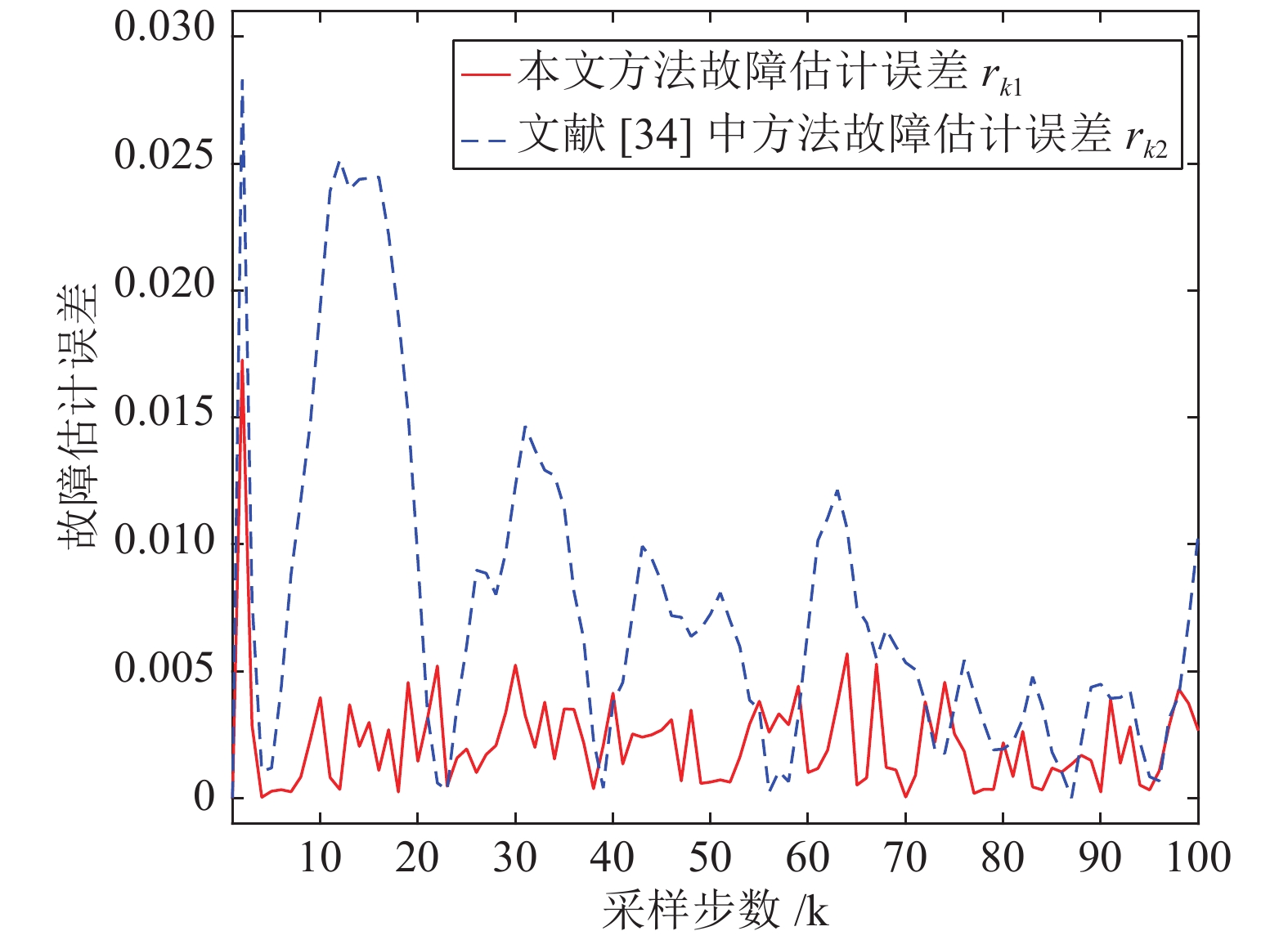
针对具有传感器故障和未知扰动与测量噪声的线性离散系统, 提出了一种传感器故障区间估计方法. 将传感器故障视为增广状态, 原始系统转化为一个等效的广义系统. 为了得到故障的点估计同时抑制扰动和噪声的影响, 基于有界实引理设计了一个针对广义系统的鲁棒状态观测器. 然后, 通过中心对称多胞体技术实现对故障的区间估计并基于鲁棒正不变集给出了一种降低区间估计计算量的方法. 最后, 通过一个垂直起降(Vertical take-off and landing, VTOL)飞行器线性化模型的仿真算例验证了所提出方法的有效性与优越性.
针对具有传感器故障和未知扰动与测量噪声的线性离散系统, 提出了一种传感器故障区间估计方法. 将传感器故障视为增广状态, 原始系统转化为一个等效的广义系统. 为了得到故障的点估计同时抑制扰动和噪声的影响, 基于有界实引理设计了一个针对广义系统的鲁棒状态观测器. 然后, 通过中心对称多胞体技术实现对故障的区间估计并基于鲁棒正不变集给出了一种降低区间估计计算量的方法. 最后, 通过一个垂直起降(Vertical take-off and landing, VTOL)飞行器线性化模型的仿真算例验证了所提出方法的有效性与优越性.
2020, 46(9): 1993-2002.
doi: 10.16383/j.aas.c180857
cstr: 32138.14.j.aas.c180857
摘要:
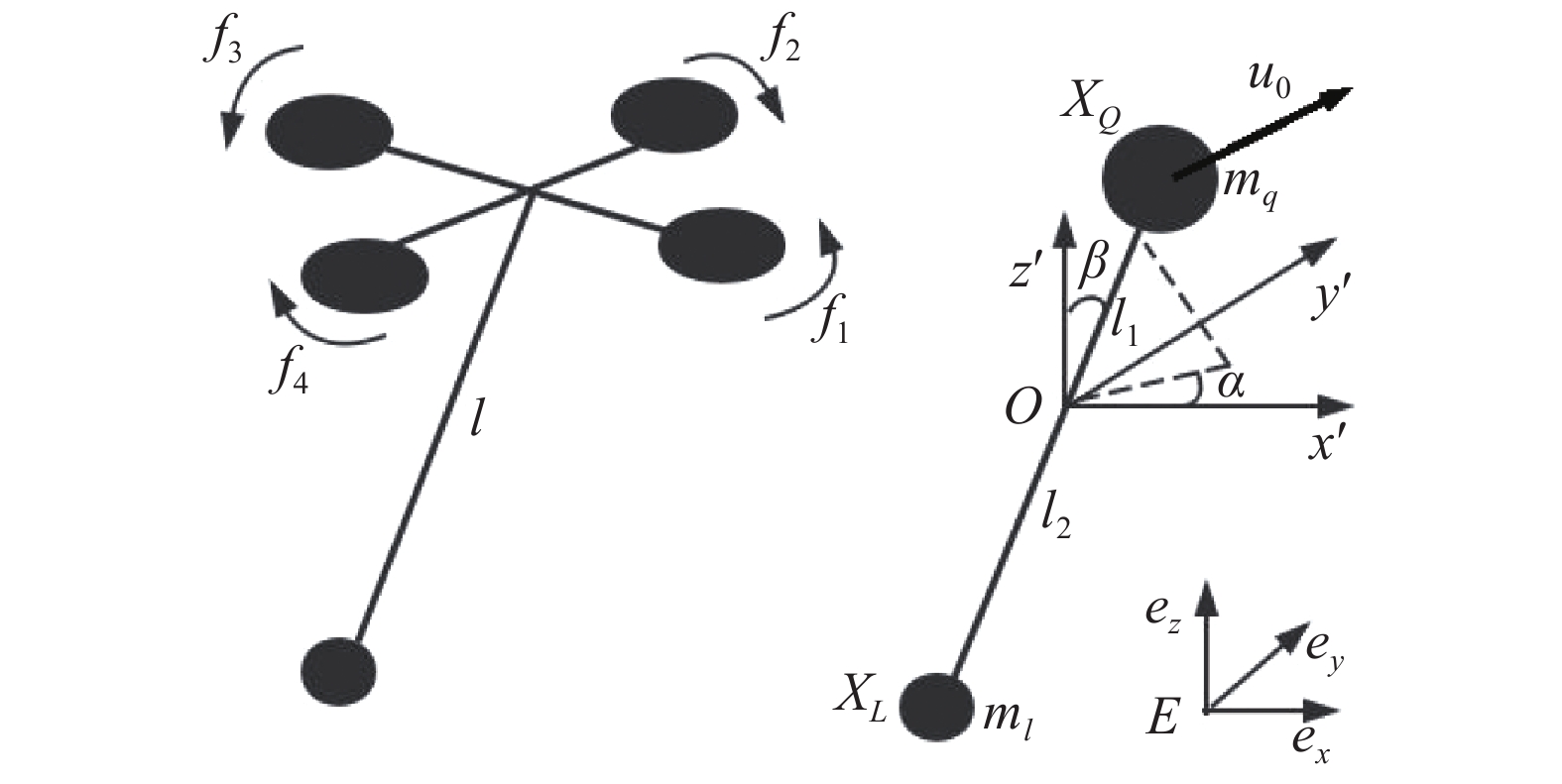
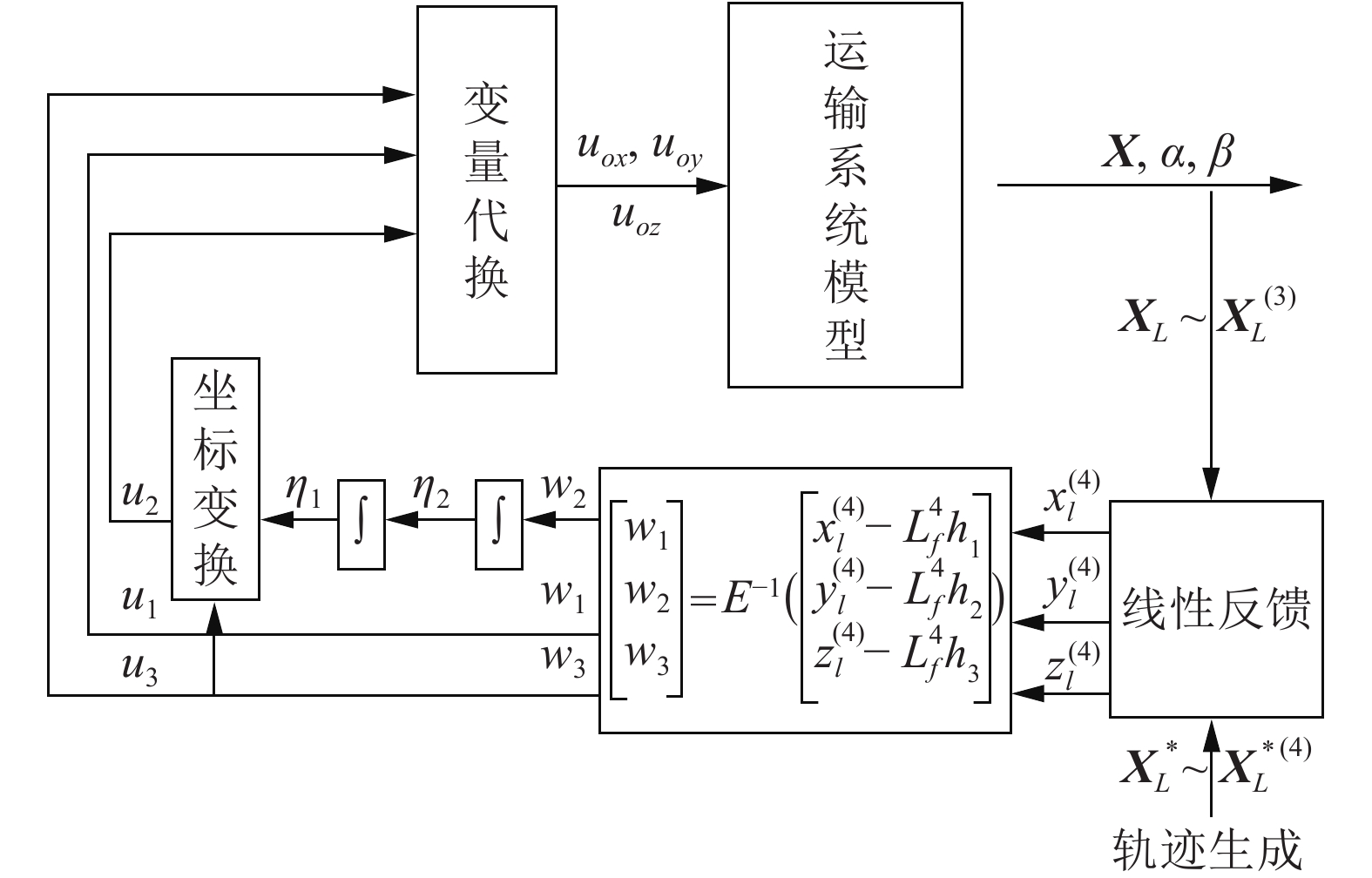
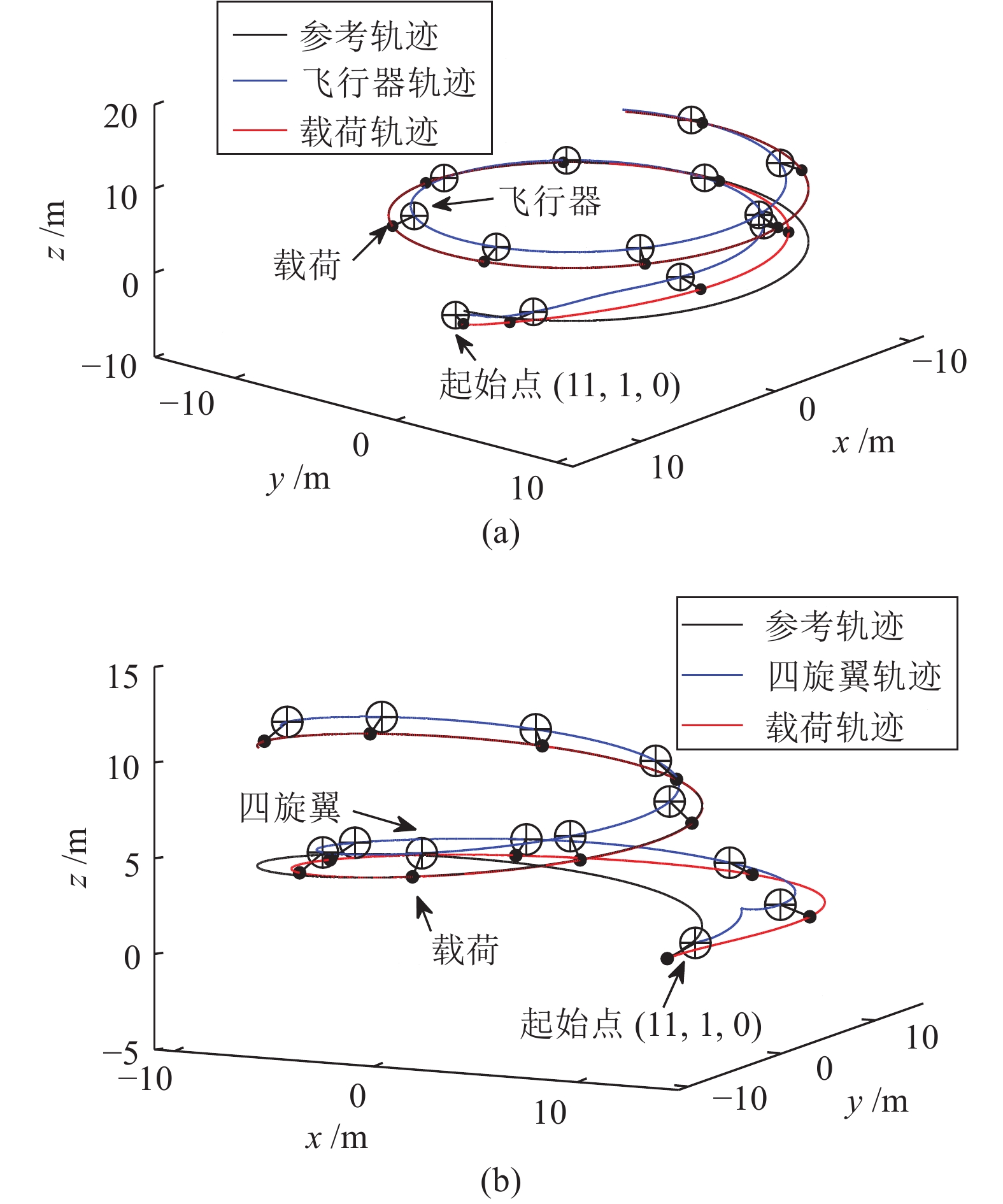
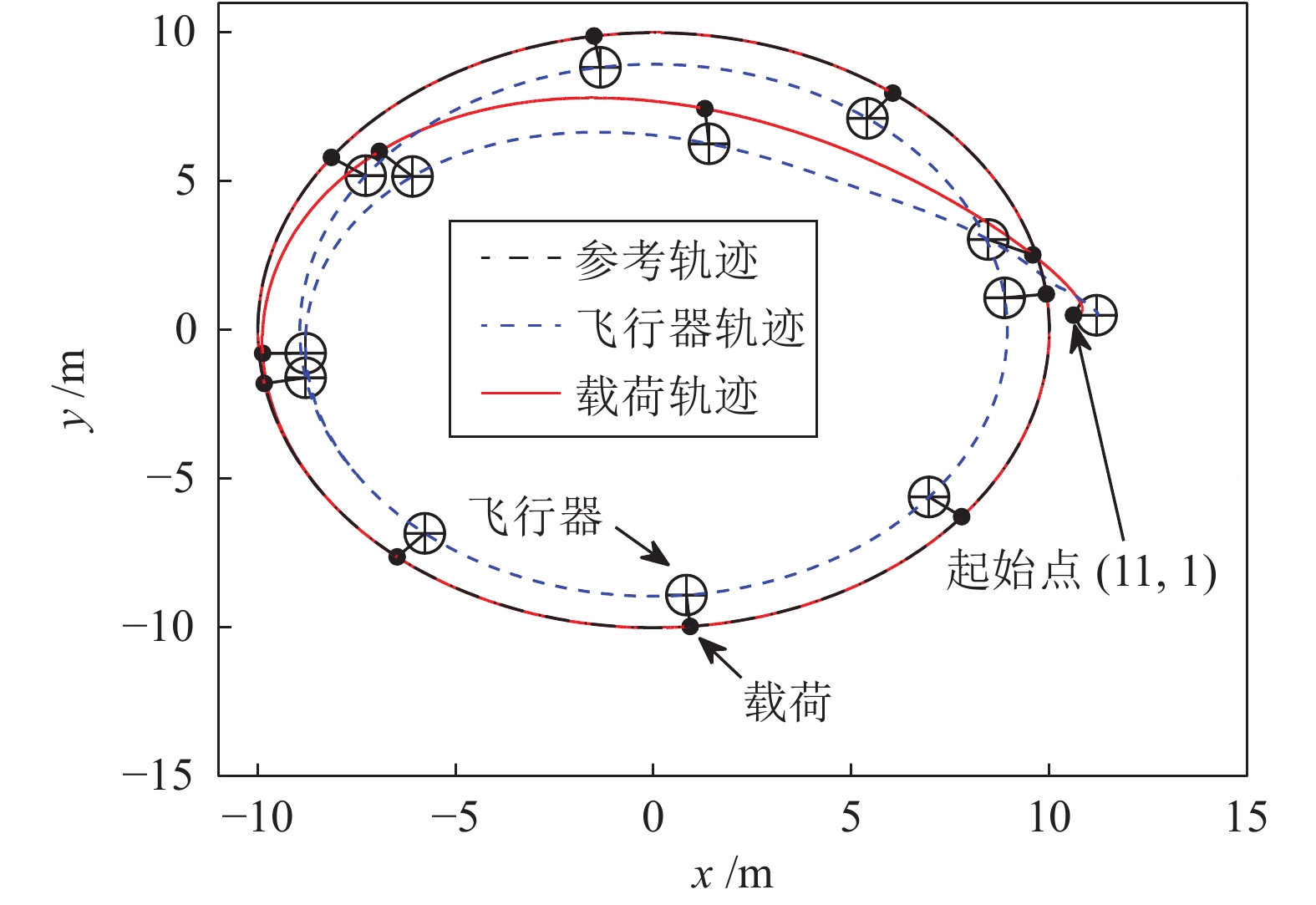
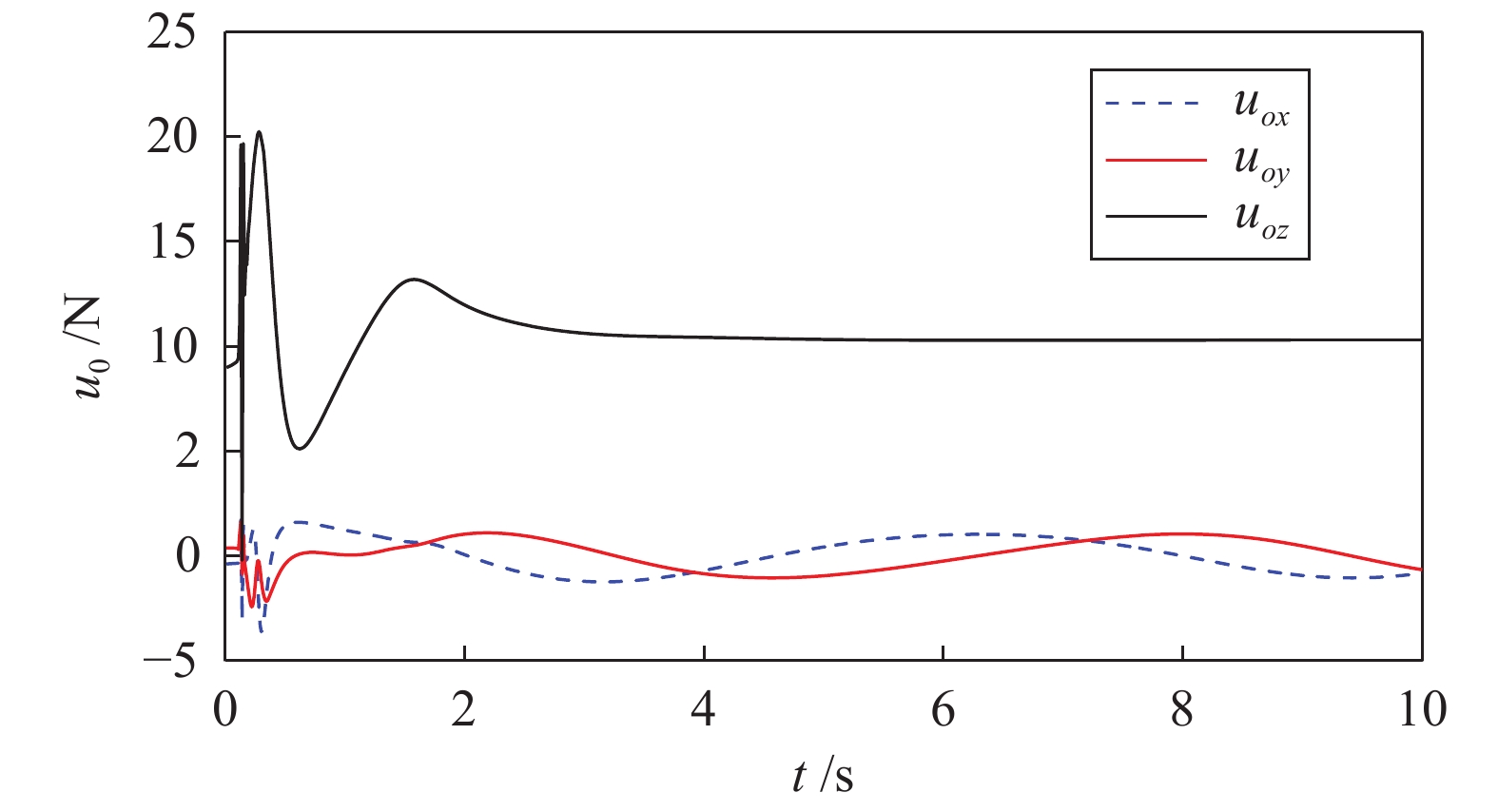
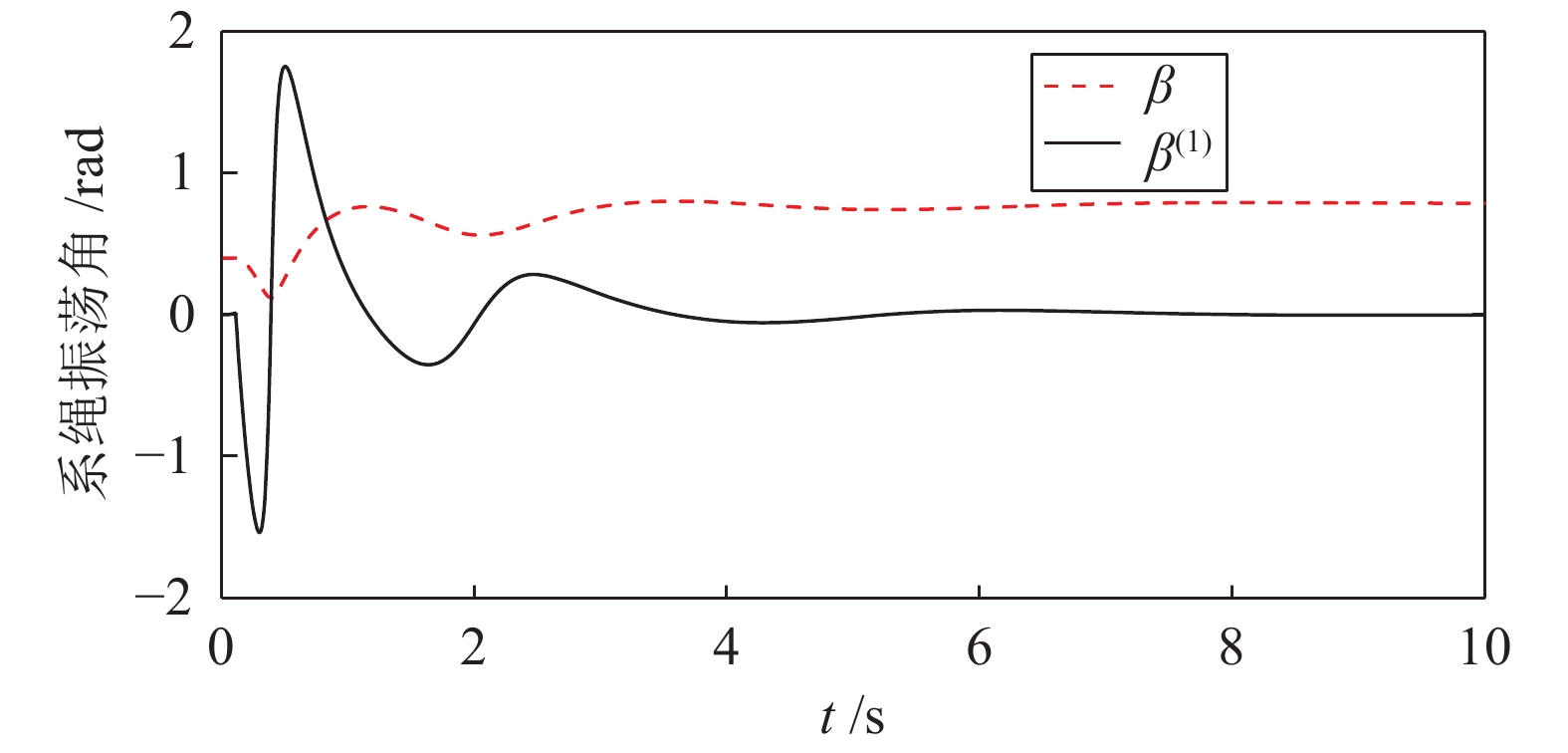
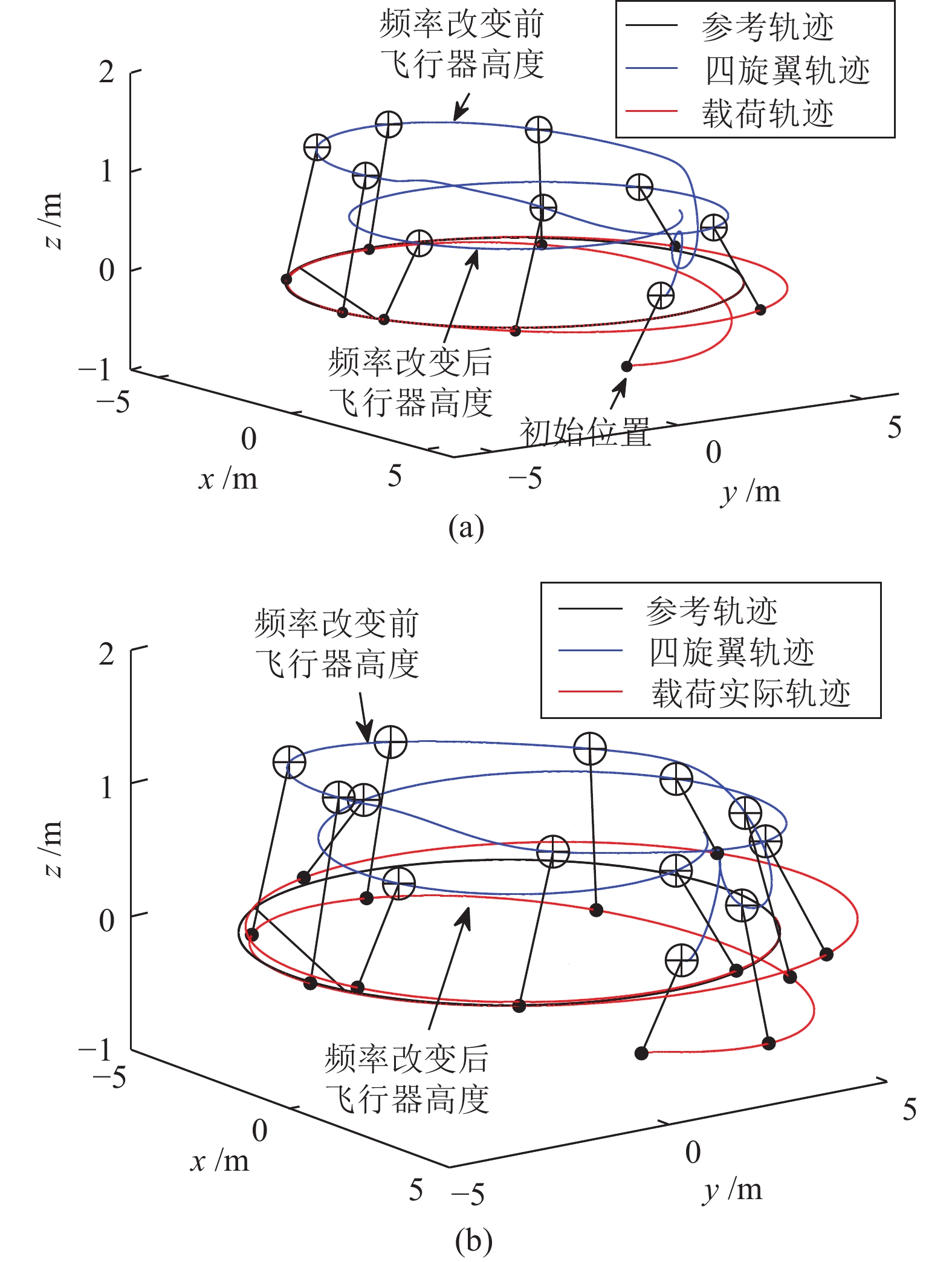
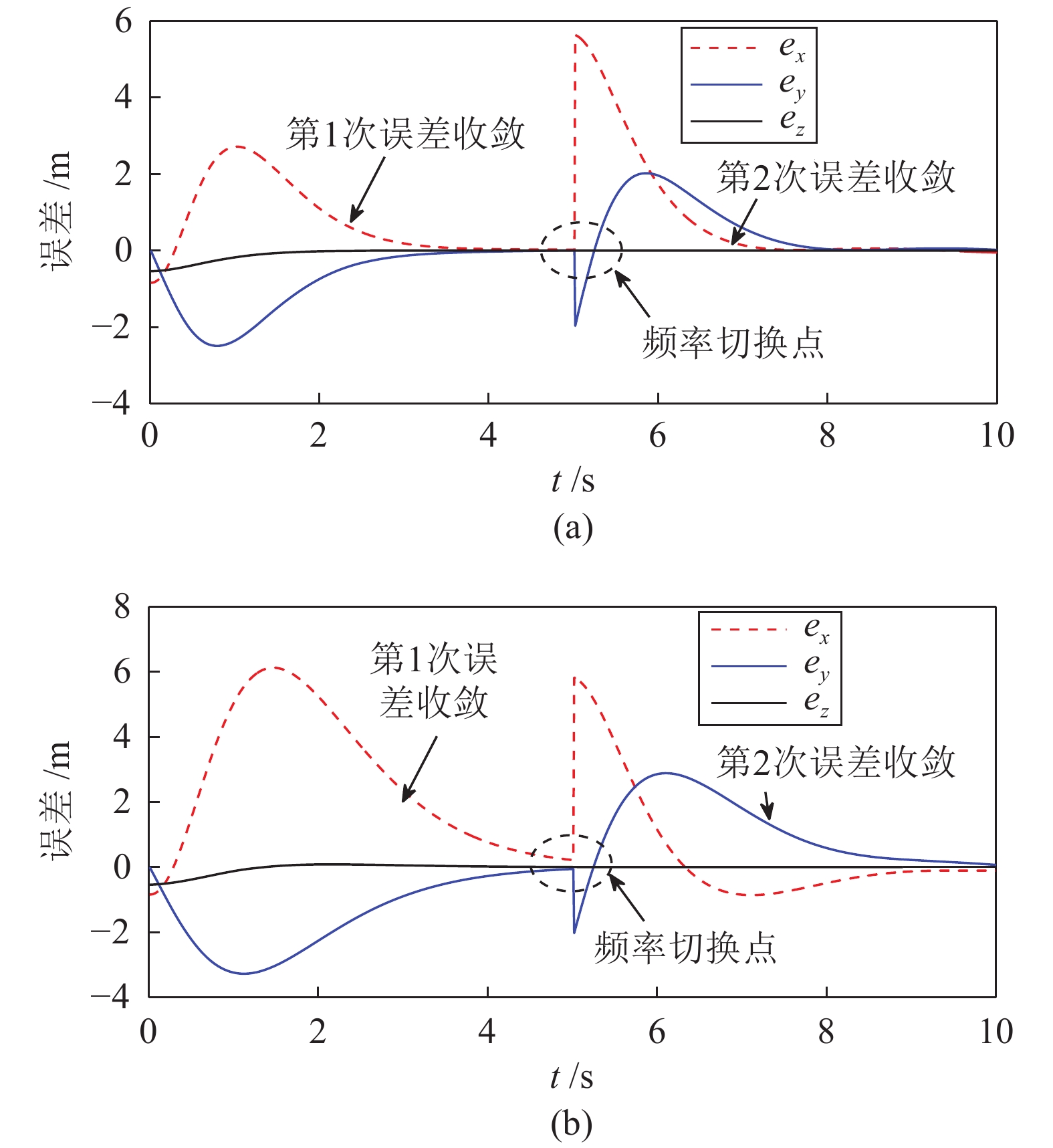
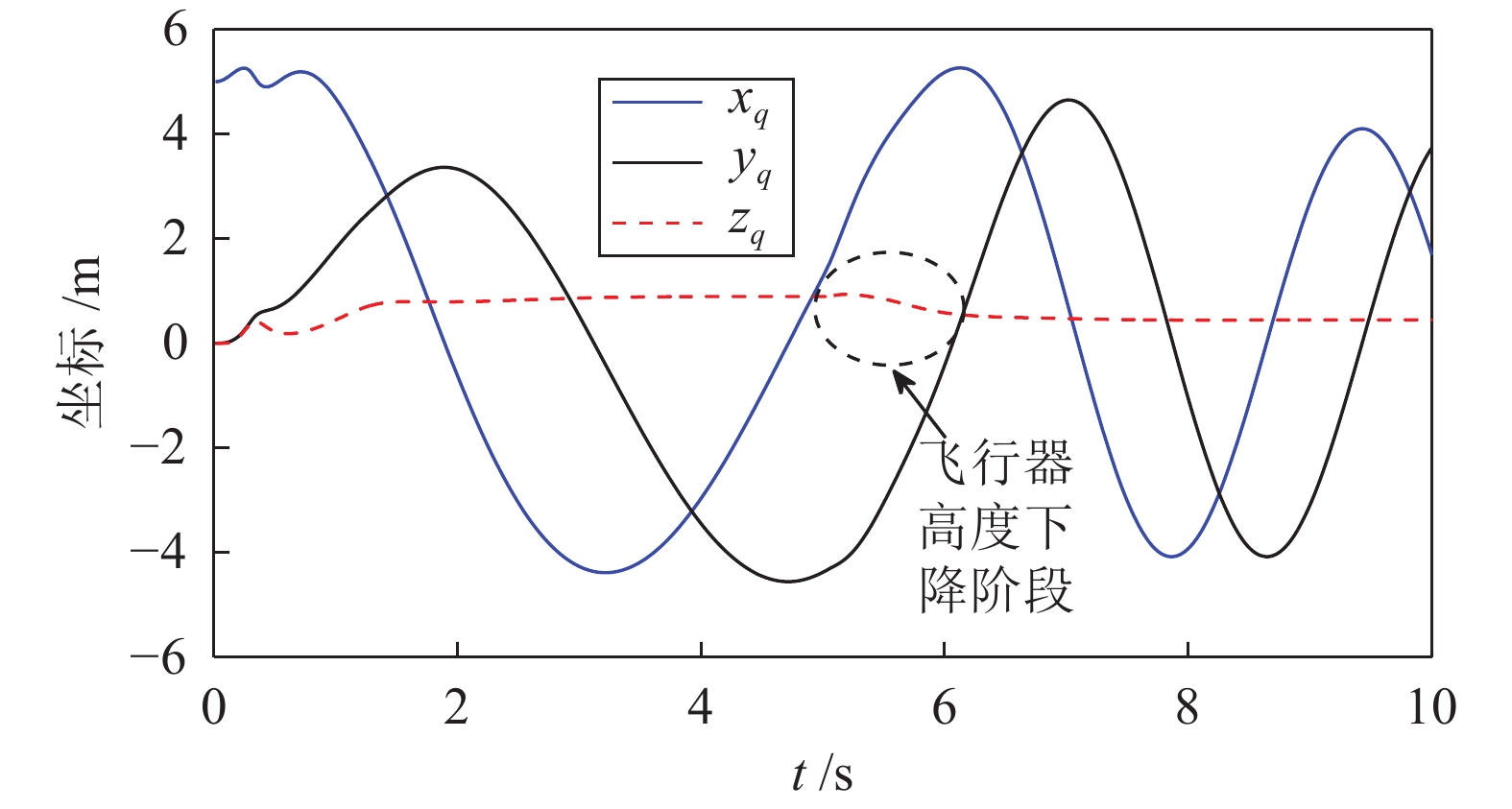
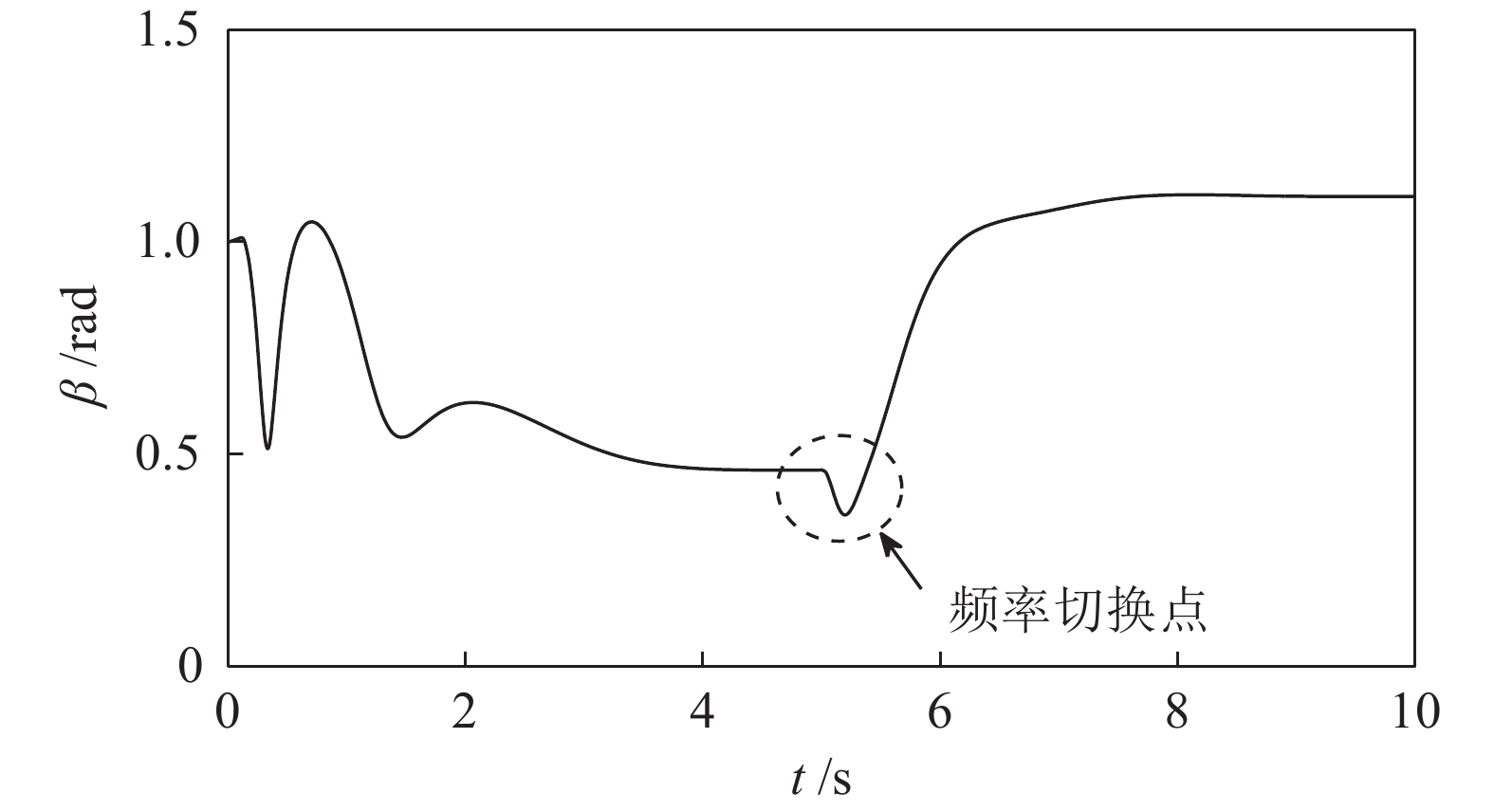
三维空间下的四旋翼吊挂运输系统是一种欠驱动、强耦合、多变量的非线性系统. 根据系统的动力学特点, 将系统分解为双质点系绳连接子系统和四旋翼姿态控制子系统. 选择与系统自由度维数相同的广义坐标并基于虚位移原理计算对应的广义力, 从而建立系统的拉格朗日动力学方程. 利用微分平滑特性证明了运输系统存在平凡零动态, 因此可通过动态反馈转化为线性和能控系统. 经过2次动态扩展和变量代换, 原系统扩展为总相对阶等于系统状态维度的线性能控系统. 基于赫尔维茨稳定性判据, 设计了跟踪误差指数收敛的动态反馈控制律. 该方法可作为一类非线性系统控制器设计的标准方法. 最后以三维空间的螺旋曲线及水平面内频率变化的圆周曲线为参考轨迹进行仿真, 仿真结果验证了控制系统的有效性.
三维空间下的四旋翼吊挂运输系统是一种欠驱动、强耦合、多变量的非线性系统. 根据系统的动力学特点, 将系统分解为双质点系绳连接子系统和四旋翼姿态控制子系统. 选择与系统自由度维数相同的广义坐标并基于虚位移原理计算对应的广义力, 从而建立系统的拉格朗日动力学方程. 利用微分平滑特性证明了运输系统存在平凡零动态, 因此可通过动态反馈转化为线性和能控系统. 经过2次动态扩展和变量代换, 原系统扩展为总相对阶等于系统状态维度的线性能控系统. 基于赫尔维茨稳定性判据, 设计了跟踪误差指数收敛的动态反馈控制律. 该方法可作为一类非线性系统控制器设计的标准方法. 最后以三维空间的螺旋曲线及水平面内频率变化的圆周曲线为参考轨迹进行仿真, 仿真结果验证了控制系统的有效性.