

Hierarchical Monitoring for Multi-unit Chemical Processes Based on Local-global Correlation Features
-
摘要: 针对一类多单元化工过程的监测问题, 提出基于局部−整体相关特征的分层故障检测与故障定位方法, 通过表征单元内部变量相关性、单元与单元间相关性、局部单元与过程整体相关性, 对过程运行状态进行判断, 以提升过程监测的准确性与可靠性. 首先, 采用典型相关分析, 通过引入邻域单元相关变量提取每个单元的独有特征和外部相关特征; 其次, 对每个单元的独有特征和所有单元的外部相关特征建立统计模型实现分层故障检测; 然后, 建立单元−变量分层贡献图, 对故障单元以及故障变量实现分层定位. 通过在Tennessee Eastman仿真过程和一个实验室级甘油精馏过程中的应用说明所提分层监测方法的有效性.Abstract: A hierarchical process monitoring method based on local-global correlation features is proposed for a class of multi-unit chemical processes. The process operation status is identified by characterizing the correlation within a local unit, between units, and between the local unit and the whole process, through which the monitoring reliability is enhanced. First, based on canonical correlation analysis, individual characteristics and external correlation characteristics of each unit are extracted by introducing correlated variables from neighboring units; Second, multivariate statistical monitoring models are established for individual characteristics of each unit and external correlation characteristics of all units; Then, the unit-variable hierarchical contribution plot is established to locate the fault units and fault variables hierarchically. The effectiveness of the proposed hierarchical monitoring is demonstrated through applications to the Tennessee Eastman process and a laboratory distillation process.
-
传统的电网是单向电力流网络, 缺乏信息流与电力流的信息交互. 即, 电机产生的电能通过变电、输电和配电等环节发送到负载端, 并没有形成反馈回路. 与传统的电力网络相比, 智能电网融合了先进的传感器技术、通信技术和计算机技术, 是一个典型的信息物理系统(Cyber physical system, CPS)[1-3]. 智能电网实现了信息流与电力流的双向交流, 并确保了系统更加安全、经济和高效运行. 然而, 信息物理的深度融合也使智能电网通信节点暴露, 容易遭受来自信息层的各种网络攻击. 因此, 如何确保智能电网的安全运行至关重要.
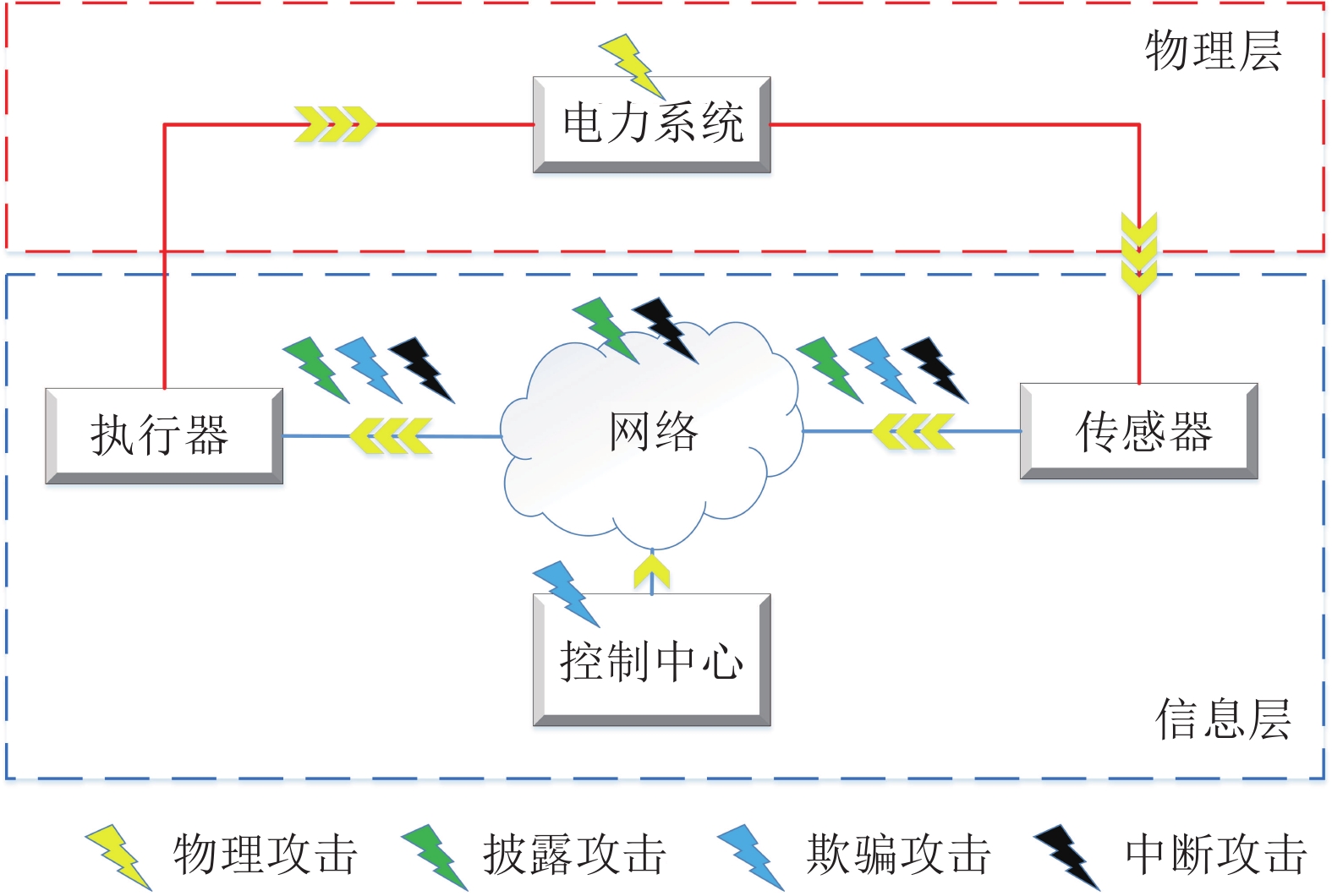
目前, 智能电网面临的攻击类型繁多且呈现出不断增长的态势. 如图1所示, 根据信息流在控制系统反馈回路中所处的核心作用, 将主要的攻击类型分为三类: 披露攻击、欺骗攻击和中断攻击[4]. 信息披露攻击[5]是指包括窃听在内的任何网络入侵行为. 欺骗攻击对应的是信号篡改与破坏, 其中虚假数据注入攻击(False data injection attack, FDIA) 最为典型[6-7]. 中断攻击对应于另一种信号可能被阻止或延迟的攻击, 如拒绝服务攻击[8]. 当前众多网络攻击之中, FDIA被认为是对安全系统操作最具挑战性的攻击[9]. 与其他攻击不同, 攻击者可以利用电网的有关信息和知识设计能够不被坏数据检测(Bad data detection, BDD)机制发现的FDIA. 因此, FDIA的隐蔽性对电力系统产生极大的威胁, 其可导致系统切负荷、线路过载、破坏电力市场等严重后果.
目前, 智能电网虚假数据注入攻击的防御研究已经成为当前研究热点. 孙凯祺等提出了一种基于攻击重组卷积神经网络的虚假数据注入攻击防御策略[10]. 刘鑫蕊等提出了一种基于SCADA和PMU混合量测的状态类空间隐蔽型恶性数据在线防御方法[11]. 为最小化系统遭受级联故障攻击时遭受的损失, Nguyen等提出了一种基于齐次等式的虚假数据注入攻击防御算法[12]. Zhang等提出了一种双利移动目标防御的防御策略以保护智能电网免受网络物理攻击[13]. 为了提高防御性能, Tian等提出了一种攻击者无法检测到的隐藏运动目标防御方法[14]. 为减少攻击对电网系统的破坏性, Xu等提出了一种基于滑模控制器的鲁棒自适应弹性防御方法[15]. 考虑攻击下电网结构的脆弱性, Hou等提出了一种基于自适应控制器的虚假数据注入攻击防御方法[16]. 考虑到FDIA的隐蔽特性和潜在威胁, Luo等提出了一种基于虚拟隐藏网络的虚假数据注入攻击弹性防御方法[17]. 对比现有研究工作[18-19], 该方法结合图论与控制论提出了基于零和博弈的竞争性互联策略, 可以有效提高智能电网的弹性防御. 然而, 文献[17]在二分图拓扑和虚拟隐含网络拓扑的选择方面, 需要满足一些限制条件. 因此, 针对二分图拉普拉斯矩阵与连接拓扑之间的拓扑优化还需进一步研究提高其防御性能.
目前, 学者们在路径拓扑优化方面已经开展了一些重要工作. 一种基于随机森林的快速搜索随机树算法被提出应用于室内复杂火场环境下路径规划[20]. 面向高层消防救援, 李鸿一等提出一种基于随机采样的多无人机协同搜索规划方法[21]. 受启发于以上路径优化方法, 本文提出了一种基于图论的拓扑结构优化算法来改善攻击防御性能. 首先, 通过Kron还原法得到一个降维模型, 进而设计了一个虚拟隐含网络与原网络互联, 间接改善智能电网的结构脆弱性; 进一步考虑图的连通度、连通图的可去边和权值的影响来提高FDIA的防御性能. 创新点如下:
1) 针对二分图连接拓扑与二分图拉普拉斯矩阵之间不能一一对应问题, 提出了权值分配法.
2) 根据图的连通度[11]与连通图的可去边原理, 给出了虚拟隐含网络拓扑和二分图连接网络拓扑的选择依据.
3) 提出了基于二分图拓扑结构的权值指标函数, 并给出了权值矩阵的选择依据. 最后, 通过在IEEE-14总线电网系统上的仿真验证了所提优化算法的有效性.
1. 图论的基础知识
考虑智能电网是双向流系统, 系统中各节点间的连接关系可以通过无向图来描述. 图$ G(V, E) $由顶点集$ V = (1, 2, \cdots, n) $和边集$ E \subset V \times V $组成, $ V, E $分别对应电力网络中节点集合和节点间的连接路径的集合. 每条边$ e \in E $由顶点对$ (i, j) $表示. 如果图$ G $的任意一个顶点对$ (i, j) $满足$\forall(i, j) \times E \Rightarrow (j, i) \times E$, 那么图$ G $是一个无向图, 反之则是有向图. 如果图$ G $中任意两个不同顶点间恰有一条边连接, 则称此图为完全图. 一个图$ G(V, E) $由它的顶点对之间的邻接关系唯一确定. 图的这种关系均可以用矩阵来刻画, 用$ m_{i, j} $表示$ G $中$ i $与$ j $之间的边数, 称矩阵$ M(G) = (m_{i, j})_{n \times n} $为$ G $的邻接矩阵. 顶点$ i $的邻域集被定义为$ N_{i} = ( j \in V | (i, j)\in E ) $, 与顶点$ i $相关联的边数, 称为顶点$ i $的度, 记为$ d(i) = \left| N_{i} \right| $, $ G $的度矩阵 $ D(G) $ 为 ${\rm{diag}}\{d(1), d(2), \cdots, d(n)\}$. 拉普拉斯矩阵$ L(G) = D(G)-M(G) $. $ L(G) $是半正定矩阵且所有行的和等于$ 0 $, 我们可以用$\lambda_{1}(G) \ge \lambda_{2}(G) \ge \cdots \ge \lambda_{n-1}(G) \ge \lambda_{n}(G) = 0$来表示$ L(G) $的特征值. 如果对图$ G $的任意两个顶点$ i $和$ j $, $ G $中存在一条路径$ (i, j) $, 则称$ G $是连通图, 否则称为非连通图. 对于一个非连通图$ G $, 我们可以把$ G $分成几个子图$ G_{1}, G_{2}, \cdots, G_{k} $, 且每个$ G_{i} $是连通的. 非连通图$ G $的这些子图称为是$ G $的连通分支.
2. 基于图论的虚假数据注入攻击弹性防御策略
2.1 基于虚拟隐含网络的控制策略
将电力网络中的平衡节点、PV节点和PQ节点等效为无向图中的顶点, 节点间的传输线路等效为无向图的边, 就得到电力网络的等效拓扑图. 通过研究电力网络的拓扑结构, 改变节点的数量或改变节点间的连接状态, 可改善智能电网的结构脆弱性, 有效防御假数据注入攻击. 考虑到现实中改变电力网络拓扑结构的高成本和复杂性, 引入了虚拟隐含网络, 并通过二分图实现原系统拓扑与虚拟隐含网络拓扑的互联, 如图2所示, $ \Sigma_{1} $表示原系统的等效拓扑, $ \Sigma_{2} $表示虚拟隐含网络等效拓扑, $ \Sigma_{{\rm{eng}}} $表示二分图连接网络等效拓扑.
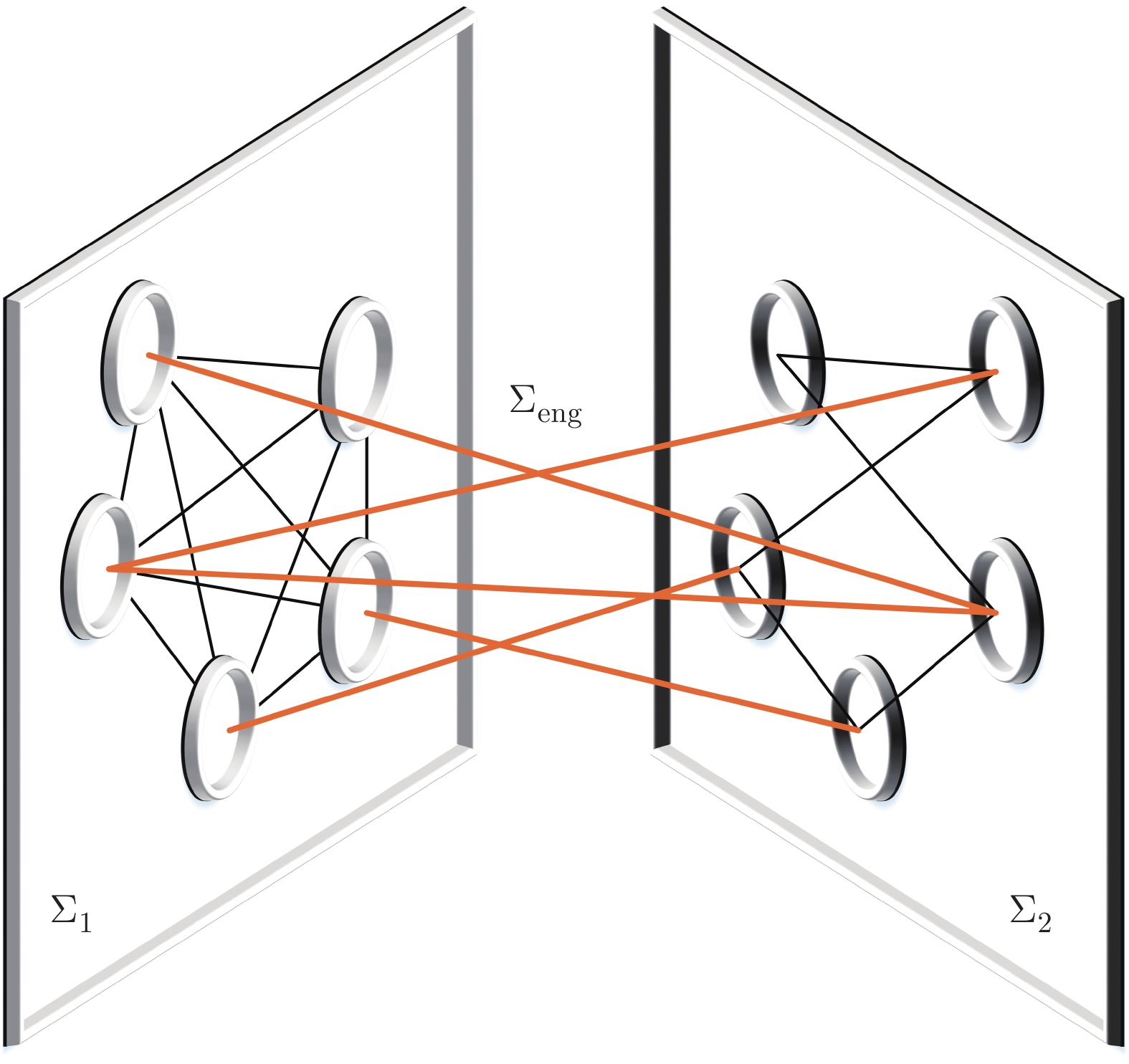 图 2 互联网络结构: ${{{\Sigma}}_{{1}}}$为电力系统拓扑, ${{{\Sigma}}_{{2}}}$为虚拟隐含网络拓扑, ${{{\Sigma}}_{\rm{eng}}}$为二分图连接拓扑Fig. 2 Connection network structure: ${{{\Sigma}}_{{1}}}$ is the power system topology, ${{{\Sigma}}_{{2}}}$ is the virtual network topology, and ${{{\Sigma}}_{\rm{eng}}}$ is the connection topology of bipartite graph
图 2 互联网络结构: ${{{\Sigma}}_{{1}}}$为电力系统拓扑, ${{{\Sigma}}_{{2}}}$为虚拟隐含网络拓扑, ${{{\Sigma}}_{\rm{eng}}}$为二分图连接拓扑Fig. 2 Connection network structure: ${{{\Sigma}}_{{1}}}$ is the power system topology, ${{{\Sigma}}_{{2}}}$ is the virtual network topology, and ${{{\Sigma}}_{\rm{eng}}}$ is the connection topology of bipartite graph优化电力系统拓扑$ \Sigma_{1} $, 等价于改变节点间的传输线路或为某些节点安装硬件保护装置, 这些做法都需要消耗大量成本且受现实条件制约. 因此, 引入虚拟隐含网络$ \Sigma_{2} $, 通过改变$ \Sigma_{2} $的拓扑结构间接改善$ \Sigma_{1} $的结构脆弱性. 此外, 选择合适的二分图拓扑$ \Sigma_{{\rm{eng}}} $, 使$ \Sigma_{1} $和$ \Sigma_{2} $形成零和博弈, 增强互联系统的弹性. 经过仿真验证, 基于虚拟隐含网络的防御方法可以有效防御FDIA. 加入虚拟隐含网络的互联系统模型如下:
$$ \left\{ \begin{aligned} \dot{x} & = Ax+\beta Kz+Bu_{0} \\ \dot{z} & = Hz-\beta Kx+\beta Kx_{0} \end{aligned} \right. $$ (1) 设$ \Sigma_{1} $和$ \Sigma_{2} $都是有$ N $个节点的图, 则$ x \in {\bf{R}}^{2N} $为$ \Sigma_{1} $的状态, $ z \in {\bf{R}}^{2N} $为$ \Sigma_{2} $的状态, $ x_{0} \in {\bf{R}}^{2N} $为稳态初始状态, $ u_{0} \in {\bf{R}}^{N} $为稳态机械输入功率, $A \in {\bf{R}}^{2N \times 2N}$和$ H \in {\bf{R}}^{2N \times 2N} $分别为$ \Sigma_{1} $和$ \Sigma_{2} $的系统矩阵, 形式为$\left[\begin{aligned} \star \;\;\; \star \\ \star L \;\; \star \end{aligned}\right]$, 其中$ L \in {\bf{R}}^{N \times N} $为$ \Sigma_{1} $和$ \Sigma_{2} $对应的拉普拉斯矩阵, $ \star $为具体内容的省略表示. $ B $为$ \Sigma_{1} $的输入矩阵, $ K \in {\bf{R}}^{2N \times 2N} $形式为$\left[\begin{aligned} L_{{\rm{eng}}} \;\; {\boldsymbol{0}}_{N \times N} \\ {\boldsymbol{0}}_{N \times N} \;\; L_{{\rm{eng}}} \end{aligned}\right]$, 其中, $L_{{\rm{eng}}} \in {\bf{R}}^{N \times N}$为二分图对应的拉普拉斯矩阵. $ \beta $为待设计的常数参数.
2.1.1 不存在攻击时的稳定性分析
在对互联系统进行稳定性分析之前, 首先分析具有$ A(\kappa) = A_{0}+\kappa A_{1} $形式的系统稳定性定理.
定理 1[22]. $ A(\kappa) = A_{0}+\kappa A_{1} $, 其中$ A_{0} $具有稳定的谱特征且为非亏损矩阵. $ V_{0} $的对角化形式为$ A_{0} = V_{0}^{-1}J_{1}V_{0} $, 其中$ V_{0} $是可逆矩阵, $ J_{1} $是对角矩阵. 令$ Y = V_{0}^{-1}A_{1}V_{0} $, 如果$ Y $的特征值的最大实部小于或等于0, 则存在区间$ \kappa \in (0, \kappa_{0}) $, $ \kappa_{0} >0 $, 使$ A(\kappa) $具有稳定的谱特征且为非亏损矩阵.
定义状态变换为$ \tilde{x} = x-x_0 $, 则将式$ (1) $重写如下
$$ \left\{ \begin{aligned} \dot{\tilde{x}} & = A \tilde{x}+\beta Kz+Ax_0+Bu_{0} \\ \dot{z} & = Hz-\beta K (\tilde{x}+x_{0})+\beta K x_{0} \end{aligned} \right. $$ (2) 基于文献[17]工作可知$ Ax_{0}+Bu_{0} = 0 $, 代入式$ (2) $得到
$$ \left\{ \begin{aligned} \dot{\tilde{x}} & = A \tilde{x}+\beta Kz \\ \dot{z} & = Hz-\beta K \tilde{x} \end{aligned} \right. $$ (3) 重写式$ (3) $可以得到
$$ \left[ \begin{array}{c} \dot{\tilde{x}}\\ \dot{z} \end{array} \right] = \left[ \begin{array}{ccc} A & \beta K \\ -\beta K & H \end{array} \right] \left[ \begin{array}{c} \tilde{x}\\ z \end{array} \right] $$ (4) 式$ (4) $的稳定性与如下方程的稳定性等价
$$ A(\kappa) = A_{0}+\kappa A_{1} $$ (5) 其中$\kappa = -1/\beta$, $A_{0} = \left[\begin{aligned} 0_{n \times n} \;\; -K\; \\ K\;\;\; \;\; 0_{n \times n} \end{aligned}\right]$, $A_{1} = \left[ \begin{aligned} A \;\;\; 0_{n \times n} \\ 0_{n \times n} \;\; H\;\; \end{aligned}\right]$.
将$ A_{0} $表示为克罗内克积的形式$ A_{0} = J \otimes K $, 其中$J = \left[\begin{aligned} 0 \; -1 \\ 1 \;\;\;\; 0\; \end{aligned}\right]$, 将矩阵$ J $和$ K $表示为二次型形式, $ J = V_{J}^{-1} D_{J} V_{J} $, $ K = V_{K}^{-1} D_{K} V_{K} $, 其中$ D_{J} $和$ D_{K} $是对应于$ J $和$ K $的对角化矩阵. 因此, 得到如下等式
$$ A_{0} = (V_{J} \otimes V_{K})^{-1}(D_{J} \otimes D_{K})(V_{J} \otimes V_{K}) $$ (6) 通过计算得到$V_{J} = \dfrac{1}{\sqrt{2}} \left[\begin{aligned} -{\rm{j}} \;\; {\rm{j}} \\ 1 \;\;\; 1 \end{aligned}\right]$, $D_{J} = \left[\begin{aligned} 0 \;\; {\rm{j}} \\{\rm{j}} \;\; 0 \end{aligned} \right]$, 其中${\rm{j}}$为虚数符号. 进一步计算得到
$$ V_{J} \otimes V_{K} = \dfrac{1}{\sqrt{2}} \begin{bmatrix} -{\rm{j}} V_{K} & {\rm{j}} V_{K} \\ V_{K} & V_{K} \end{bmatrix} $$ (7) 对式$ (7) $求逆得到
$$ (V_{J} \otimes V_{K})^{-1} = \sqrt{2} \begin{bmatrix} \dfrac{1}{2}{\rm{j}} V_{K}^{-1} & \dfrac{1}{2} V_{K}^{-1} \\ -\dfrac{1}{2}{\rm{j}} V_{K}^{-1} & \dfrac{1}{2} V_{K}^{-1} \end{bmatrix} $$ (8) 进一步得到
$$ \begin{split} &{({V_J} \otimes {V_K})^{ - 1}}({A_1})({V_J} \otimes {V_K}) = \\ &\quad\left[ {\begin{array}{*{20}{c}} {\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}}&{ - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}\\ { - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}&{\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}} \end{array}} \right] \end{split} $$ (9) 由于$ A+H $是具有一个零特征值的半负定矩阵, $-({1}/{2})V_{K}^{-1}(A+H)V_{K}$也是一个半负定矩阵, 因此将式(9)重写为
$$ \begin{split} &\left[ {\begin{array}{*{20}{c}} {\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}}&{ - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}\\ { - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}&{\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}} \end{array}} \right] = \\ &\dfrac{1}{2}\left[ {\begin{array}{*{20}{c}} {V_K^{ - 1}}&0\\ 0&{V_K^{ - 1}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {A + H}&{H - A}\\ {H - A}&{A + H} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{V_K}}&0\\ 0&{{V_K}} \end{array}} \right] \end{split} $$ (10) 由于$ K $为实对称拉普拉斯矩阵, 存在正交相似变换矩阵$ V_{K} $, 使得$V_{K}^{-1} = V_{K}^{{\rm{T}}}$, 因此, 式$ (10) $重写为
$$ \begin{split} &\left[ {\begin{array}{*{20}{c}} {\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}}&{ - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}\\ { - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}&{\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}} \end{array}} \right] = \\ &\dfrac{1}{2}{\left[ {\begin{array}{*{20}{c}} {{V_K}}&0\\ 0&{{V_K}} \end{array}} \right]^{\rm{T}}}\left[ {\begin{array}{*{20}{c}} {A + H}&{H - A}\\ {H - A}&{A + H} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{V_K}}&0\\ 0&{{V_K}} \end{array}} \right] \end{split}$$ (11) 根据合同变换的理论, 由于 $\left[\begin{aligned} V_{K} \;\; 0\;\; \\ 0 \;\; V_{K} \end{aligned}\right]$ 是可逆的, $\left[\;\; {\begin{aligned} {\frac{1}{2}V_K^{ - 1}(A + H){V_K}}\;\;\;\;{ - \frac{1}{2}V_K^{ - 1}(A - H){V_K}}\\ { - \frac{1}{2}V_K^{ - 1}(A - H){V_K}}\;\;\;\;{\frac{1}{2}V_K^{ - 1}(A + H){V_K}}\; \end{aligned}} \;\;\right]$ 和 $\left[ \begin{aligned} {A + H}\;\;{H - A}\\ {H - A}\;\;{A + H} \end{aligned} \right]$的正负特征值个数相同.
引理 1.
$\left[ \begin{aligned} {A + H}\;\;{H - A}\\ {H - A}\;\;{A + H} \end{aligned} \right]$的特征值实部是非正的.
证明. 假设$\left[ {\begin{aligned} {A + H}\;\;{H - A}\\ {H - A}\;\;{A + H} \end{aligned}} \right]$的特征值为$ \lambda $, 对应的特征向量为$ [\xi_{1}^{{\rm{T}}}, \xi_{2}^{{\rm{T}}}]^{{\rm{T}}} $, 则有如下等式关系
$$ \left[ {\begin{array}{*{20}{c}} {A + H}&{H - A}\\ {H - A}&{A + H} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{\xi _1}}\\ {{\xi _2}} \end{array}} \right] = \lambda \left[ {\begin{array}{*{20}{c}} {{\xi _1}}\\ {{\xi _2}} \end{array}} \right]$$ (12) 将式$ (12) $展开后得到
$$ \left\{ {\begin{aligned} &{(A + H){\xi _1} + (H - A){\xi _2} = \lambda {\xi _1}}\\ &{(H - A){\xi _1} + (A + H){\xi _2} = \lambda {\xi _2}} \end{aligned}} \right. $$ (13) 做差后进一步得到
$$ 2A\xi_{1}-2A\xi_{2} = 2A(\xi_{1}-\xi_{2}) = \lambda(\xi_{1}-\xi_{2}) $$ (14) 式$ (14) $说明, 特征值$ \lambda $是矩阵$ 2A $的一个特征向量, 其对应的特征向量为$ \xi_{1}-\xi_{2} $. 由于$ A $的特征值都具有非正的实部, 所以$ \lambda $也都具有非正的实部.
□ 根据定理1, 对于形式为式(1)的互联系统, 在没有攻击的情况下, 存在参数$ \beta \in (-\infty, \beta_{0}) $, 使得互联系统保持稳定.
2.1.2 有攻击时的稳定性分析
考虑到具有隐蔽性的有界的恶意攻击向量$ d $式$ (1) $可以重新整理为
$$ \left\{ \begin{aligned} &\dot x = Ax + \beta Kz + B{u_0} + d\\ &\dot z = Hz - \beta Kx + \beta K{x_0} \end{aligned} \right. $$ (15) 定义状态变换为$ \tilde{x} = x-x_{0} $, 将互联系统$ (15) $重写如下
$$ \left\{ \begin{aligned} &\dot {\tilde{x}} = A\tilde x + \beta Kz + d\\ &\dot z = Hz - \beta K\tilde x \end{aligned} \right.$$ (16) 由式$ (16) $变换, 可以得到
$$ \left[ {\begin{array}{*{20}{c}} {\dot {\tilde{x}}}\\ {\dot d}\\ {\dot z} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} A&I&{\beta K}\\ 0&0&0\\ { - \beta K}&0&H \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\tilde x}\\ d\\ z \end{array}} \right]$$ (17) 式中, $I $为单位矩阵. 式(17)的稳定性表示如下.
$$ A(\kappa) = A_{0}+\kappa A_{1} $$ (18) 其中$ \kappa = -1/\beta $, $A_{0} = \left[\begin{aligned} 0 \;\;\;\; 0 \,\; -K \\ 0 \;\;\;\; 0\;\; \;\;\;0\;\;\,\\ K \;\;\; 0 \;\;\;\;\; 0 \;\;\,\end{aligned}\right]$, $A_{1} = \left[\begin{aligned} A \;\; I\, \;\; 0 \;\\ 0\, \;\ 0\, \;\; 0 \;\\ 0\, \;\; 0 \;\; H \end{aligned} \right]$.
将$ A_{0} $表示为克罗内克积的形式$A_{0} = J \otimes K$, 其中$J = \left[\begin{aligned} 0 \;\;\;\; 0\,\; -1\, \\0 \;\; \;\;0 \;\;\; \;\;0\;\, \\1 \;\; \;\;0\;\;\;\;\; 0 \;\,\end{aligned}\right]$, 将矩阵$ J $和$ K $表示为二次型形式, $ J = V_{J}^{-1} D_{J} V_{J} $, $ K = V_{K}^{-1} D_{K} V_{K} $, 其中$ D_{J} $和$ D_{K} $是对应于$ J $和$ K $的对角化矩阵. 因此, 得到如下等式
$$ A_{0} = (V_{J} \otimes V_{K})^{-1}(D_{J} \otimes D_{K})(V_{J} \otimes V_{K}) $$ (19) 通过计算得到$V_{J} = \left[\begin{aligned} -{\rm{j}} \;\; {\rm{j}} \;\; 0\\ 0 \,\;\; 0 \;\; 1 \\ 1 \;\;\, 1 \;\; 0 \end{aligned}\right]$, $D_{J} = \left[ \begin{aligned} 0 \;\;\,\;\; \,{\rm{j}} \,\;\;\, 0 \,\\ \dfrac{1}{2}{\rm{j}}\; \;\; 0 \,\;\; \dfrac{1}{2} \\ 0\,\; -1 \;\; 0\, \end{aligned}\right]$. 进一步计算得到
$$ V_{J} \otimes V_{K} = \begin{bmatrix} -{\rm{j}} V_{K} & {\rm{j}} V_{K} & 0\\ 0 & 0 & V_{K} \\ V_{K} & V_{K} & 0 \end{bmatrix} $$ (20) 对式$ (20) $求逆, 可以得到
$$ \begin{split} &{({V_J} \otimes {V_K})^{ - 1}}({A_1})({V_J} \otimes {V_K}) = \\ &\left[ {\begin{array}{*{20}{c}} {\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}}&{ - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}&{\dfrac{1}{2}{\rm{j}}I}\\ { - \dfrac{1}{2}V_K^{ - 1}(A - H){V_K}}&{\dfrac{1}{2}V_K^{ - 1}(A + H){V_K}}&{ - \dfrac{1}{2}{\rm{j}}I}\\ 0&0&0 \end{array}} \right] \end{split} $$ (21) 进一步得到
$$ \begin{split} &{({V_J} \otimes {V_K})^{ - 1}}({A_1})({V_J} \otimes {V_K}) = \\ &\dfrac{1}{2}{\left[ {\begin{array}{*{20}{c}} {{V_K}}&0&0\\ 0&{{V_K}}&0\\ 0&0&{{V_K}} \end{array}} \right]^{\rm{T}}}\left[ {\begin{array}{*{20}{c}} {A + H}&{H - A}&{{\rm{j}}I}\\ {H - A}&{A + H}&{ - {\rm{j}}I}\\ 0&0&0 \end{array}} \right]\;\times\\ &\left[ {\begin{array}{*{20}{c}} {{V_K}}&0&0\\ 0&{{V_K}}&0\\ 0&0&{{V_K}} \end{array}} \right]\\[-25pt] \end{split} $$ (22) 根据合同变换的理论, 由于$\left[\begin{aligned} V_{K} \;\; 0\;\; \;\; 0\;\; \\0\; \;\; V_{K} \;\; 0 \;\;\\0 \;\;\;\; 0\; \;\; V_{K} \end{aligned}\right]$是可逆的, $\left[ \;{\begin{aligned} {\frac{1}{2}V_K^{ - 1}(A\; +\; H){V_K}}\;\;{ - \frac{1}{2}V_K^{ - 1}(A - H){V_K}}\;\;{\frac{1}{2}{\rm{j}}I}\;\\ { - \frac{1}{2}V_K^{ - 1}(A \;-\; H){V_K}}\;\;\;{\frac{1}{2}V_K^{ - 1}(A + H){V_K}}\;\;{ - \frac{1}{2}{\rm{j}}I}\\0\qquad\qquad\quad\;\;\;\;\;\;\;\;\;\;\;0\qquad\quad\;\;\;\;\;\;\;\;0\;\;\; \end{aligned}} \;\right]$ 和 $\left[ {\begin{aligned} {A \,+\, H}\;\;{H \,-\, A}\;\;\;\;{{\rm{j}}I}\;\\{H \,-\, A}\;\;{A\, +\, H}\;\;{ - {\rm{j}}I}\\0\;\;\;\qquad0\;\;\qquad0 \;\;\end{aligned}} \right]$的正负(实部)特征值个数相同.
引理 2.
$\left[\;\; {\begin{aligned} {A + H}\;\;\;\;{H - A}\;\;\;\;\;\;{{\rm{j}}I}\;\\ {H - A}\;\;\;\;{A + H}\;\;\;\;{ - {\rm{j}}I}\\0\;\;\;\;\;\qquad0\;\;\;\;\qquad0\;\; \end{aligned}}\;\; \right]$的特征值实部是非正的.
证明过程与引理1相似, 此处省略. 根据定理1, 对于形式为式$ (15) $的互联系统, 在存在FDIA的情况下, 存在参数$ \beta \in (-\infty, \beta_{0}) $, 使得互联系统保持稳定.
2.2 问题描述
二分图连接拓扑$ \Sigma_{{\rm{eng}}} $连接$ \Sigma_{1} $和$ \Sigma_{2} $, 涉及$ 2N $个节点, 共有$ 2^{2N} $种拓扑表示. 而二分图的拉普拉斯矩阵$ L_{{\rm{eng}}} $为$ N \times N $维, 只有$ 2^{N} $种矩阵表示. $ 2^{2N} \ne 2^{N} $, 无法实现二分图拓扑与拉普拉斯矩阵一一对应.
2.3 权值分配法
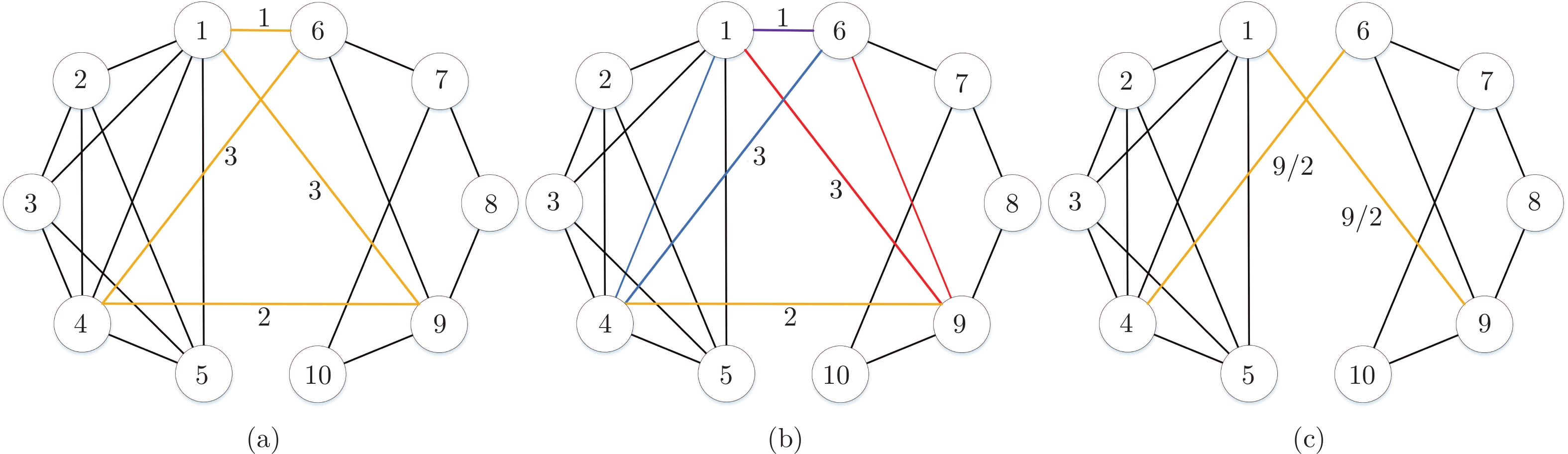
为了解决上述问题, 本节提出了权值分配法. 该方法通过将具有相同起始点的路径合并, 实现路径的消除化简. 如图3所示, 以IEEE-$ 14 $节点系统为例(经过Kron简化后, 变为$ 5 $节点), 序号为$ 1 $, $ 2 $, $ 3 $, $ 4 $, $ 5 $的节点对应$ \Sigma_{1} $中的节点, 序号为$ 6 $, $ 7 $, $ 8 $, $ 9 $, $ 10 $的节点对应$ \Sigma_{2} $中的节点. 选取$ \Sigma_{{\rm{eng}}} $如图3(a) 所示, 二分图连接拓扑结构用黄色线条表示, 相应路径的权值标在路径上(对称路径的权值大小相同). 如图3(b) 所示, 相同颜色的线构成三角形的两条路径, 由于路径$ 4\text{-}1\text{-}6 $与$ 4\text{-}6 $具有相同的功能, 所以可以把路径$ 1\text{-}6 $的权值分配到路径$ 4\text{-}6 $上. 路径$ 9\text{-}6\text{-}1 $与$ 9\text{-}1 $具有相同的功能, 所以可以把路径$ 1\text{-}6 $的权值分配到路径$ 9\text{-}1 $上. 为了保证得到对称的拉普拉斯矩阵, 将路径$ 1\text{-}6 $的权值平均分配到路径$ 4\text{-}6 $和路径$ 9\text{-}1 $上. 同理, 路径$ 4\text{-}9 $的权值也可平均分配到路径$ 4\text{-}6 $和路径$ 9\text{-}1 $上. 因此, 便可消除$ 1\text{-}6 $和$ 4\text{-}9 $这两条路径, 得到图3(c)所示的等效拓扑.
为表示方便, 作如下定义:
定义 1[23]. 当路径的一个顶点标号$ i $属于原系统, 另一个顶点标号等于$ i+5 $属于虚拟隐含网络时, 称这条路径为横路径.
定义 2[22]. 当存在回路时, 网络具有冗余度. 每个节点的度$ d(i) \ge 2 $, 当$i\text{-}j\text{-}\cdots\text{-}k\text{-}i$中的某一条路径$ i\text{-}j $消失时, 节点$ i $和$ j $能够通过$i\text{-}k\text{-}\cdots \text{-}j$继续保持连通.
推论1. 当存在一条回路时, 可以将横路径消去, 把横路径的权值分配到剩余回路中的连接拓扑中; 当存在多条回路时, 可以把横路径消去, 并把横路径的权值平均分配到其他所有剩余回路中的连接拓扑中.
证明. 根据定理$ 1 $, 当存在回路时, 横路径消失, 并不影响两节点间的连通性. 由于连接拓扑和虚拟隐含网络拓扑都是虚拟的, 所以可以采用权值平均分配的形式, 将横路径的重要性平均分配到其他连接拓扑中.
由于节点$ 1 $, $ 2 $, $ 3 $, $ 4 $, $ 5 $构成的图为完全图, 所以横路径的权值一定可以等效到其他的路径上. 但是若节点$ 6 $, $ 7 $, $ 8 $, $ 9 $, $ 10 $构成的图为非连通图, 则可能导致横路径的权值无法平均分配到其他路径上.
如图4所示, 路径$ 1\text{-}6 $与$ 1\text{-}9 $无法通过其余路径形成闭合回路, 于是路径$ 1\text{-}6 $的权值无法分配到路径$ 1\text{-}9 $上. 即使路径$ 1\text{-}6 $的权值可以分配到路径$ 4\text{-}6 $上, 但路径$ 4\text{-}6 $与$ 1\text{-}9 $的权值不相等, 无法形成对称的拉普拉斯矩阵. 因此, 要想成功消去$ 1\text{-}6 $和$ 4\text{-}9 $这样的路径, 必须保证$ \Sigma_{2} $的拓扑是连通图, 或者, 保证横路径与$ \Sigma_{2} $的连通分支部分相连. 如图5所示, 虽然$ \Sigma_{2} $是非连通图, 但是路径$ 1\text{-}6 $可以通过$ 1\text{-}6\text{-}7\text{-}8\text{-}1 $将权值分配到$ 1\text{-}8 $上, 因此也可以得到对称的拉普拉斯矩阵, 实现$ 1\text{-}6 $边的消去.
□ 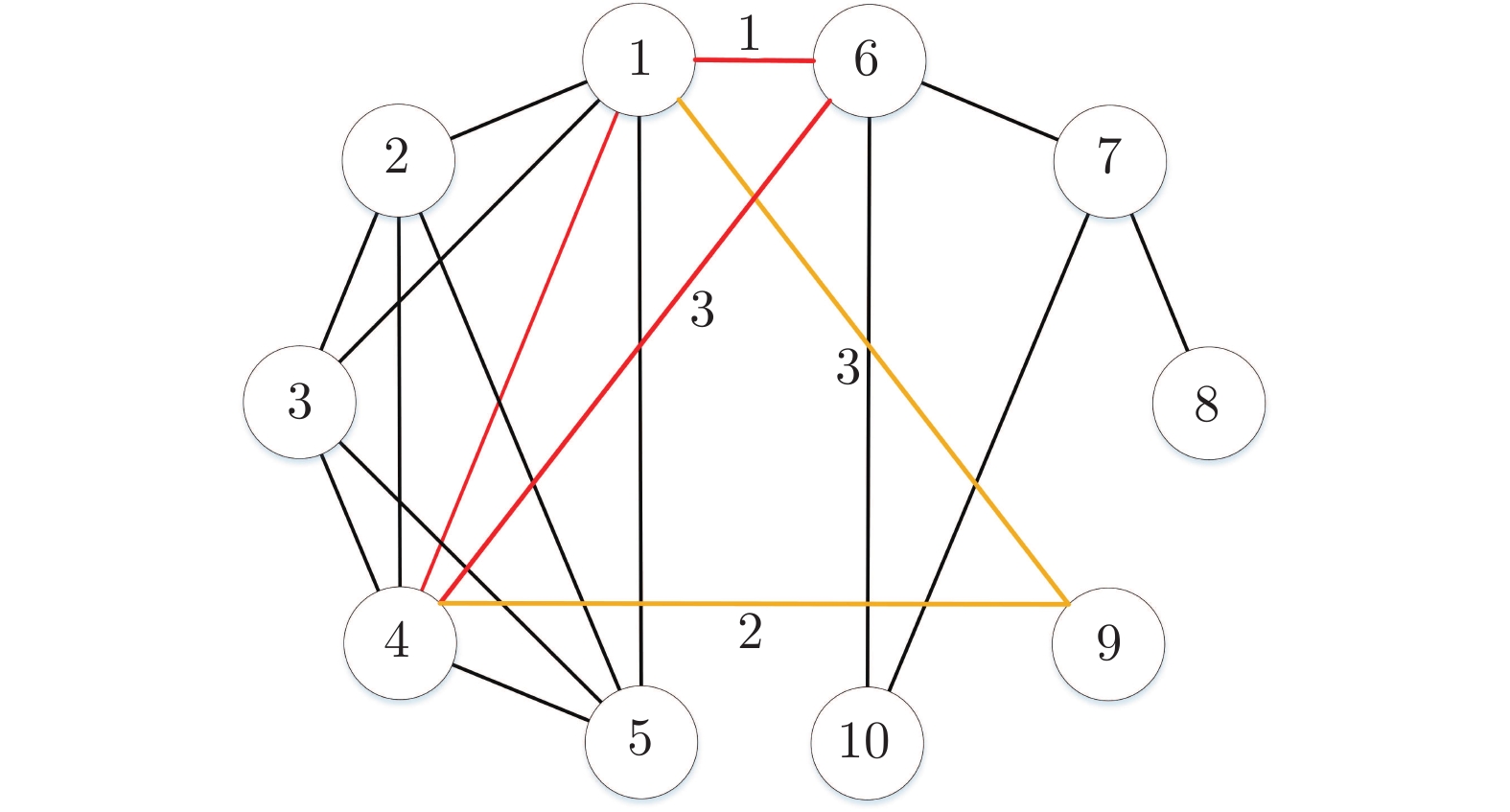 图 4 非连通图下的权值分配法无法消去横路径情形Fig. 4 The weight allocation method under disconnected graph cannot eliminate the transverse path case
图 4 非连通图下的权值分配法无法消去横路径情形Fig. 4 The weight allocation method under disconnected graph cannot eliminate the transverse path case 图 5 非连通图下存在连通分支时的权值分配法Fig. 5 Weight allocation method for connected branches in disconnected graphs
图 5 非连通图下存在连通分支时的权值分配法Fig. 5 Weight allocation method for connected branches in disconnected graphs当横路径在$ \Sigma_{2} $和$ \Sigma_{{\rm{eng}}} $中有两个或多个回路时, 横路径的权值要平均分配到其他路径. 如图6所示, 回路$ 2\text{-}6\text{-}7\text{-}2 $、回路$ 2\text{-}7\text{-}8\text{-}2 $和回路$2\text{-}7\text{-} 8\text{-}9\text{-}10\text{-}2$, 在图中标为黄色, 表明横路径$ 2\text{-}7 $可以被消去, 但路径$ 2\text{-}7 $的权值要平均分配到路径$ 2\text{-}8 $和路径$ 2\text{-}10 $上. 此时, 路径$ 2\text{-}6 $的权值变为$ 7/3 $, 路径$2\text{-}8$的权值变为$ 10/3 $, 路径$ 2\text{-}10 $的权值变为$ 16/3 $. 同理, 消去横路径$ 8\text{-}3 $后(回路$8\text{-}3\text{-}2\text{-}8 $和回路$8\text{-}3\text{-}2\text{-}6\text{-} 7)$, $ 2\text{-} 6 $的权值变为$ 17/6 $, 路径$ 2\text{-}8 $的权值变为$ 23/6 $.
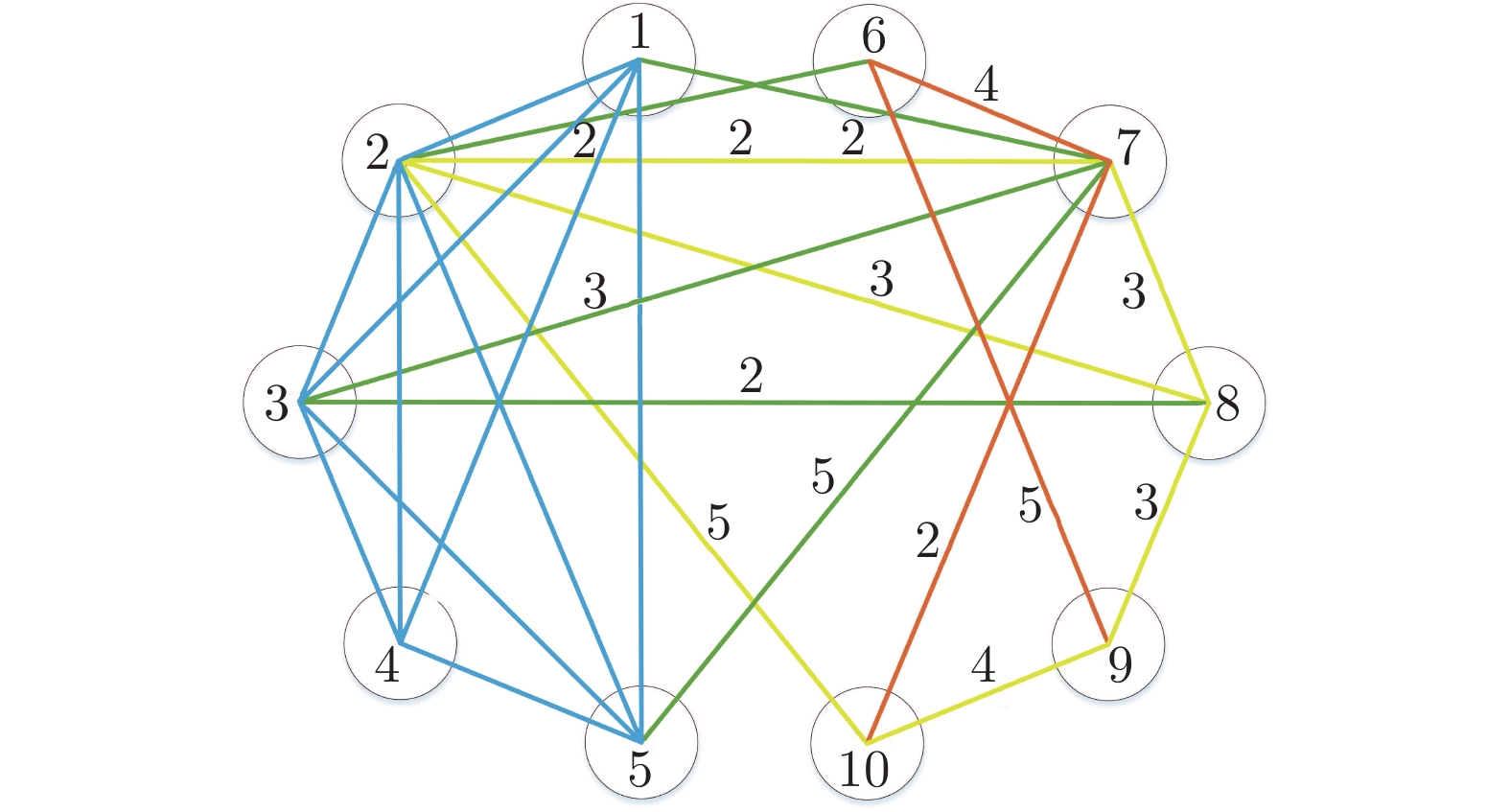 图 6 非连通图下多条横路径消去的权值分配法Fig. 6 Weight allocation method for elimination of multiple transverse paths in disconnected graphs
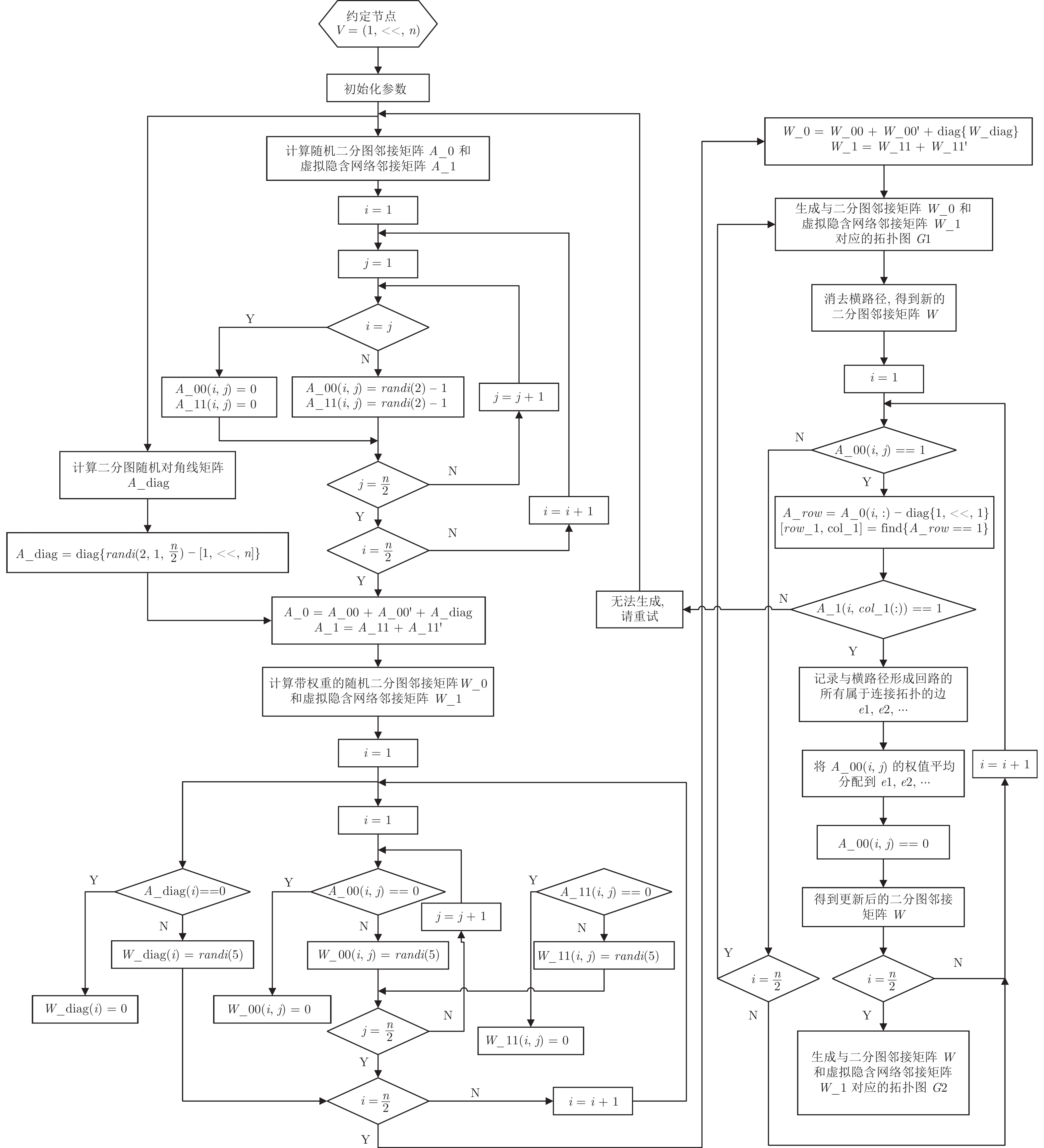
图 6 非连通图下多条横路径消去的权值分配法Fig. 6 Weight allocation method for elimination of multiple transverse paths in disconnected graphs权值分配法的流程图如图7所示.
2.4 拓扑特性
图的连通程度的高低, 在图论意义上, 是图结构性质的重要表征, 图的许多性质都与其有关; 在实际意义上, 图的连通程度的高低, 在与之对应的通信网络中, 对应于网络可靠性程度的高低. 网络可靠性, 是指网络运作的好坏程度, 即网络对某个或多个节点崩溃的容忍程度. 图的连通度和代数连通度为优化$ \Sigma_{2} $和$ \Sigma_{{\rm{eng}}} $拓扑结构, 从而为得到最优防御策略提供了依据. 为了提高智能电网通信网络的可靠性, $ \Sigma_{2} $和$ \Sigma_{{\rm{eng}}} $的选择能够使互联系统$ {\cal{G}} = (\Sigma_{1}+\Sigma_{2}+\Sigma_{{\rm{eng}}} ) $是连通图.
由于原系统的$ 5 $个发电机节点间的等效拓扑为完全图, 且FDIA仅能够对原系统产生破坏, 因此, 互联系统$ {\cal{G}} = (\Sigma_{1}+\Sigma_{2}+\Sigma_{{\rm{eng}}} ) $的连通度为$ 4 $.
定义3[24]. 设$ e $为$ 4 $连通图$ G $的一条边, 考虑如下运算:
$1)$从$ G $中去掉$ e $得到图$ G \backslash e $;
$2)$如果$ e $的某个端点在$ G \backslash e $中度为$ 3 $, 则去掉此端点, 再两两连接此端点在$ G \backslash e $中的$ 3 $个邻点;
$3)$如果经过式$ (2) $中的运算后, 有重边出现, 则用单边代替它们, 使得此图为简单图.
最后得到的图记为$ G \ominus e $, 若$ G \ominus e $为$ 4 $连通, 则称$ e $为$ G $的可去边.
对于$ 4 $连通图中可去边的分布, 有如下定理:
定理2[25]. 设$ G $为阶大于$ 5 $的$ 4 $连通图, 若$ G $的最小度大于$ 4 $, 则$ G $的任一个回路上至少有两条可去边.
由定理$ 2 $可知, 对于连通度为$ 4 $的互联系统, 若每个虚拟网络节点$ i $的度$ d(i) > 4 $, 则网络的冗余度越大, 网络可靠性越强. 当满足$ d(i) > 4 $的节点数量越多, 网络的可靠性越高.
3. 指标函数的选择
3.1 指标函数
FDIA通过篡改传感器测量参数, 干扰控制中心正确决策, 导致系统的状态偏离稳态运行值. 为了在FDIA发起情况下, 保证系统状态偏离程度在可接受范围内, 采用基于虚拟隐含网络的弹性控制方法, 通过改善系统的结构脆弱性, 将FDIA产生的影响抑制在可接受范围内, 实现攻击的有效防御. 为了评价不同的$ \Sigma_{2} $和$ \Sigma_{{\rm{eng}}} $拓扑结构对控制效果的影响, 可以选取如下的指标函数
$$ J = \frac{1}{N} \sum\limits_{n = 1}^N \Vert x-x_0 \Vert $$ (23) 式中, $ N $表示采样数据个数. 由上式可知, 指标函数的值越小, 状态偏离稳态值的程度越小, 防御效果越好.
3.2 考虑权值的指标函数
面对可以任意改变路径和路径的权值的$ \Sigma_{2} $和$ \Sigma_{{\rm{eng}}} $拓扑结构, 我们首先采用了图连通度和图的可去边理论优化边的结构. 但是, 由于边的权值表征边的重要程度, 即传输信息的能力, 一般情况下, 在拓扑结构相同的两个网络, 路径的权值越大, 控制效果越好. 因此, 在实现控制误差最小的情况下, 还要考虑权值矩阵产生的成本代价.
为此, 我们将指标函数改进如下
$$ \mathop{\min\limits_{ W_{{\rm{eng}}}, W_{2} }} J = \frac{1}{N} \sum\limits_{n = 1}^N \Vert x-x_0 \Vert + \Vert{W_{{\rm{eng}}}}\Vert_{F} + \Vert{W_{2}}\Vert_{F} $$ (24) 指标函数的第一部分表示控制误差的大小, 在稳态情况下量级很小, 在$ 1 $以内. 第二部分和第三部分分别表示攻击下$ \Vert{W_{{\rm{eng}}}}\Vert_{F} $ 和 $\Vert{W_{2}}\Vert_{F}$的权值成本, 当选定边权值上界为$ s $时, 其大小分别为$ 12.5\;{\rm{s}} $和$ 10 \;{\rm{s }}$. 当选定边权值为大于等于1的数时, 第二部分和第三部分的值远大于第一部分的值. 这与我们的预期不符. 我们的主要目标是降低控制误差, 即第一部分值的大小, 而第二部分和第三部分的值是次要的, 不能让后者占据主导地位. 为此, 我们提出倒数转化方法, 使量级很小的第一部分占据主导地位, 量级大的第二和第三部分占次要地位. 优化后的指标函数如下
$$ \mathop{\max\limits_{ W_{{\rm{eng}}}, W_{2} }} J = \frac{N}{ \sum\limits _{n = 1}^N \Vert x-x_0 \Vert} + \frac{1}{\Vert{W_{{\rm{eng}}}}\Vert_{F}} + \frac{1}{\Vert{W_{2}}\Vert_{F}} $$ (25) 综上所述, 指标函数的值越大, 说明状态偏离稳态值的程度越小, 防御效果越好.
4. 仿真验证
在本节中, 将通过IEEE-14总线系统的等效拓扑来验证拓扑优化对基于虚拟隐含网络的FDIA防御方法的性能改善. 首先, 对图的等效变换原理进行仿真验证分析; 进而给出了防御效果与拓扑选择之间的关系进行仿真分析.
4.1 图的等效变换原理仿真分析
在第$ 3 $节中, 我们介绍了图的等效变换原理和算法. 由于二分图连接拓扑表示与拉普拉斯矩阵无法一一对应, 所以需要通过权值变换的方法消去某些特定的路径, 实现二分图连接拓扑表示与拉普拉斯矩阵的一一对应.
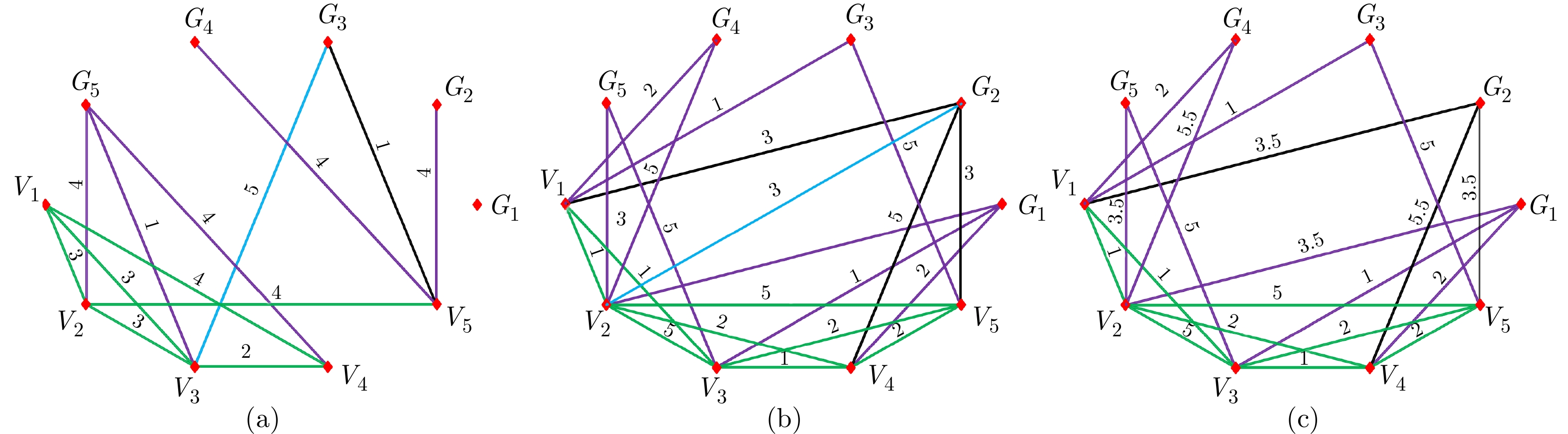
图8为图的等效变换算法的仿真结果. 图8(a)为一随机生成的图, 其中, 节点$ G_{3} $的度为$ 2 $, 路径$ G_{3}\text{-}V_{3} $只能通过路径$ G_{3}\text{-}V_{5} $实现消去, 但是在$ \Sigma_{2} $中, 节点$ V_{3} $和$ V_{5} $之间不存在一条路径, 因此, 路径$ G_{3}\text{-}V_{3} $无法消去. 图8(b)为另一随机生成的图, 其中, 节点$ G_{2} $的度为$ 4 $, 由于节点$ V_{1} $和$ V_{2} $、$ V_{2} $和$ V_{4} $以及$ V_{2} $和$ V_{5} $之间存在路径, 因此路径$ G_{2}\text{-}V_{2} $可以通过路径$ G_{2}\text{-}V_{1} $或者路径$ G_{2}\text{-}V_{4} $或者路径$ G_{2}\text{-}V_{5} $实现消去, 为此, 需要将路径$ G_{2}\text{-}V_{2} $的权值平均分配到路径$ G_{2}\text{-}V_{1} $、边$ G_{2}\text{-}V_{4} $和边$ G_{2}\text{-}V_{5} $上, 得到消去后的图如8(c)所示.
4.2 防御效果与拓扑选择关系的仿真分析
本节针对IEEE-14总线系统所遭受的FDIA, 进行基于虚拟隐含网络的弹性防御策略优化, 仿真过程中, 在60 s时对全部电机节点加入攻击.
由式(1)可知, 选择$ \Sigma_{{\rm{eng}}} $和$ \Sigma_{2} $的拓扑结构就得到了相应的参数$ K $和$ H $. 通过仿真, 可以得到不同$ \Sigma_{{\rm{eng}}} $和$ \Sigma_{2} $的拓扑结构下的转子角和角频率变化效果图.
图9(a), 9(c), 9(e)为随机生成的具有典型特征的图, 图9(b), 9(d), 9(f)分别为图9(a), 9(c), 9(e)通过权值分配法化简后的图. 图10(a), 10(c), 10(e)为随机生成的具有典型特征的图, 图10(b), 10(d), 10(f)分别为图10(a), 10(c), 10(e)通过权值分配法化简后的图. 图9和图10中的图, 全部为连通图, 但每个节点的度不相同. 对于虚拟隐含网络的节点, 其中图9(b)的度分别为$ d(6) = 5 $, $ d(7) = 7 $, $ d(8) = 6 $, $ d(9) = 5 $, $ d(10) = 5 $, 图10(f)的度分别为$ d(6) = 1 $, $ d(7) = 2 $, $ d(8) = 3 $, $ d(9) = 3 $, $ d(10) = 3 $. 由定理$2 $可知, 图9(b)的拓扑结构比图10(f)的可靠性高. 表1给出了图9(b), 9(d), 9(f), 10(b), 10(d), 10(f)的指标函数值和优化后的指标函数值. 可以看出, 一般来说, 可去边越多的拓扑选择, 优化后的指标函数值越大, 防御的效果越好. 同时, 优化后的指标函数值与未优化相比, 区分度更大, 更易判断控制效果的好坏.
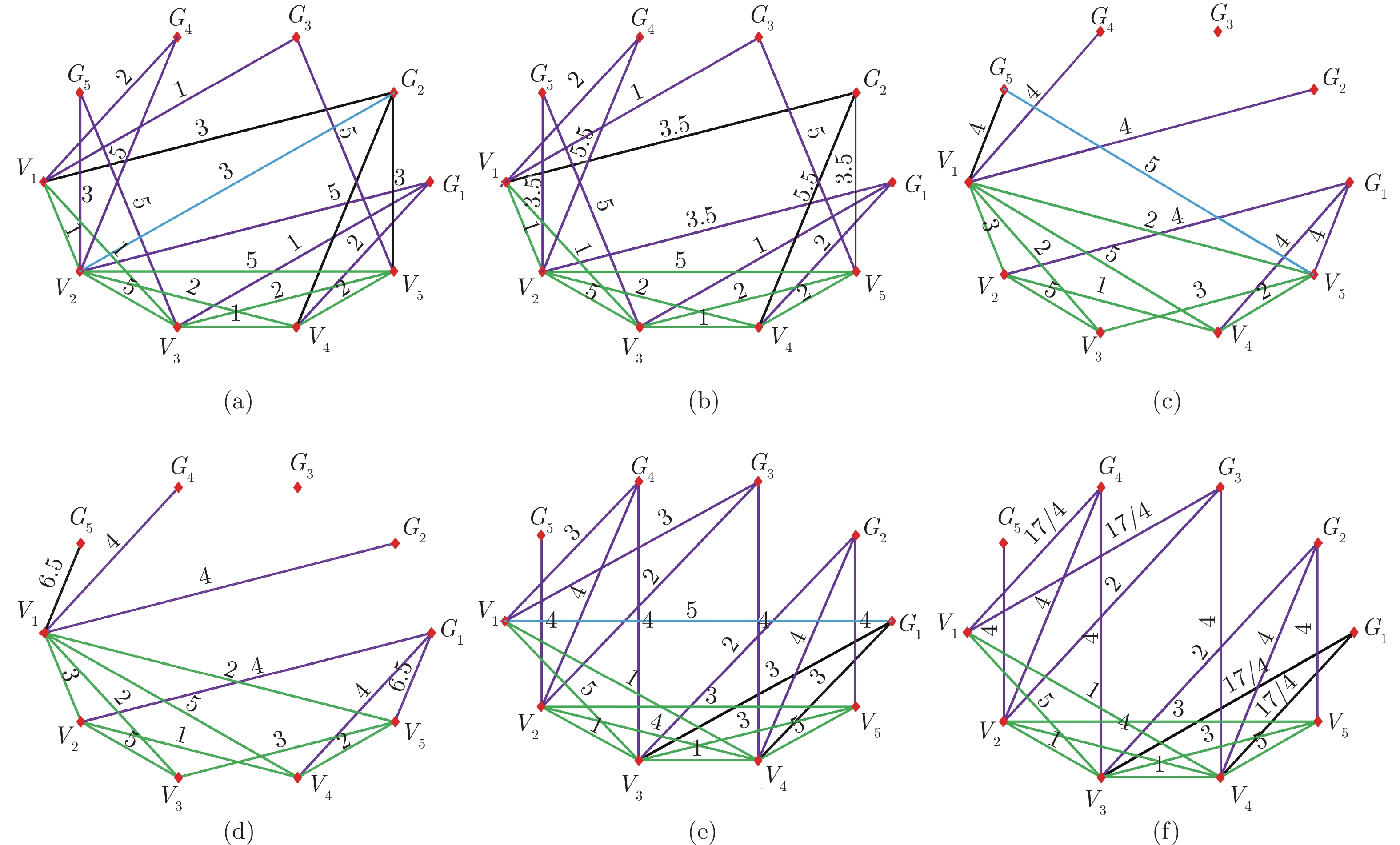 图 9 随机拓扑图及权值分配法化简后的拓扑图Fig. 9 Random topology and topology simplified by weight allocation method
图 9 随机拓扑图及权值分配法化简后的拓扑图Fig. 9 Random topology and topology simplified by weight allocation method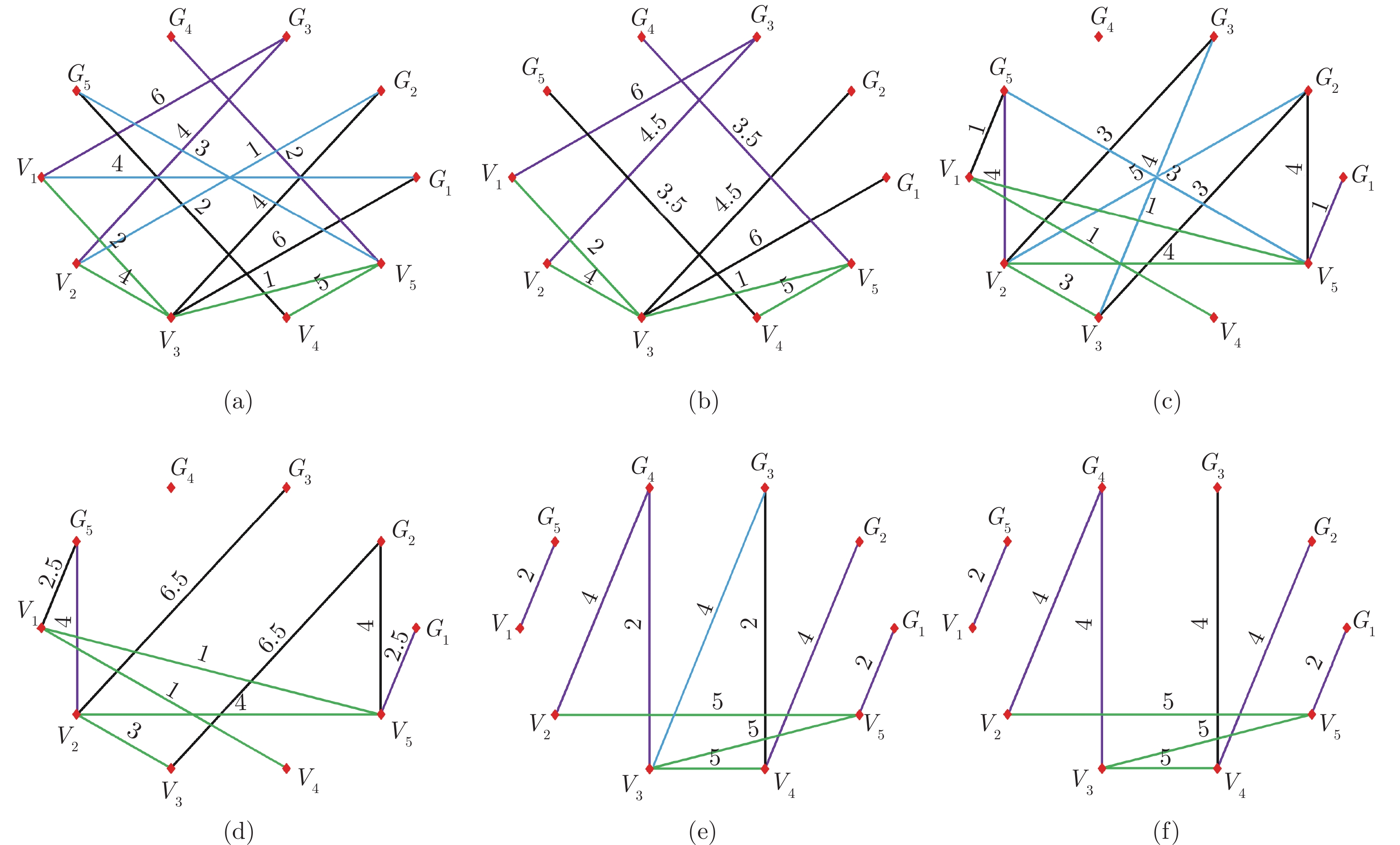 图 10 随机拓扑图及权值分配法化简后的拓扑图Fig. 10 Random topology and topology simplified by weight allocation method表 1 优化前后拓扑的指标函数值Table 1 Index function values of the topology before and after optimization
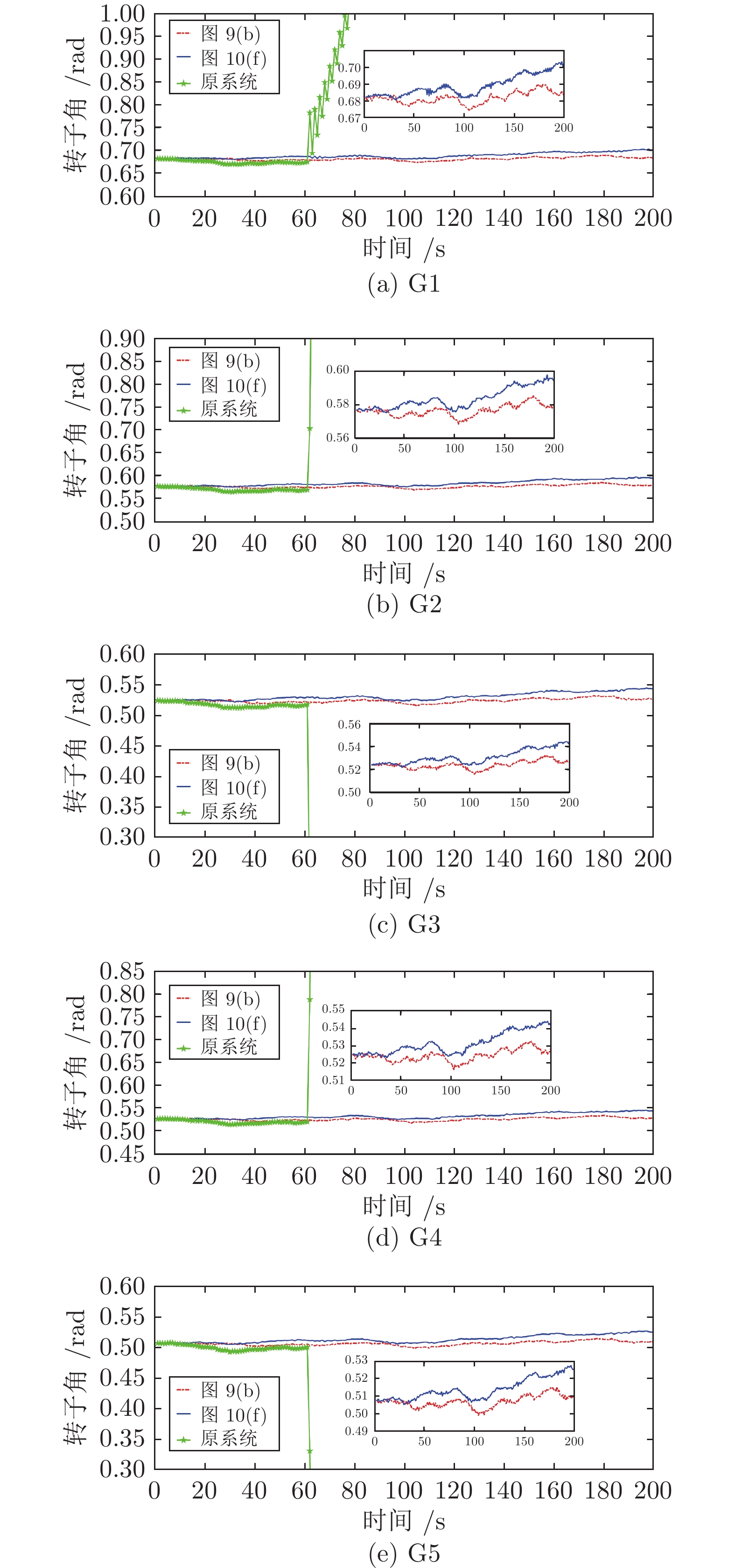
图 10 随机拓扑图及权值分配法化简后的拓扑图Fig. 10 Random topology and topology simplified by weight allocation method表 1 优化前后拓扑的指标函数值Table 1 Index function values of the topology before and after optimization仿真防御效果如图11和图12所示. 图11为IEEE-14节点系统转子角的仿真结果. 正常情况下, 在未受到FDIA时, 转子角在稳态值附近以非常小的幅值上下波动. 在不同的$ \Sigma_{2} $和$ \Sigma_{{\rm{eng}}} $选择下, 基于虚拟隐含网络的弹性防御转子角波动值不相同. 综合来说, 优化后的指标函数值越大, 防御的效果越好.
 图 12 IEEE-14节点系统角频率仿真图Fig. 12 Rotor angular frequency simulation diagram of IEEE-14 system
图 12 IEEE-14节点系统角频率仿真图Fig. 12 Rotor angular frequency simulation diagram of IEEE-14 system为了更好展示防御的效果, 选取优化后的指标函数值为$ 53.7803 $和$ 16.7136 $的两个具有代表性的拓扑选择进行仿真模拟. 图11(a)为发电机$ 14 $的仿真结果, 图中在第60 s受到FDIA后, 未加虚拟隐含网络防御的原系统转子角幅值剧烈变化, 智能电网处于不稳定运行状态. 应用了虚拟隐含网络的弹性防御策略后, 转子角幅值波动在允许范围内. 但由仿真结果可以看出, 采用图9(a)和图9(b)的拓扑结构, 其转子角的波动幅度比采用图10(e)和图10(f)的拓扑结构小得多. 图9(a)和图9(b)的可去边比图10(e)和图10(f)的可去边多, 且前者对应的优化指标函数值远大于后者, 因此, 可以通过可去边多少和考虑权值的指标函数优化防御效果. 图11(b)、11(c)、11(d)、11(e)分别表示发电机$ 2 $、$ 3 $、$ 4 $、$ 5 $的转子角变化, 它们的变化趋势与图11(a)是一致的.
图12为IEEE-14节点系统角频率的仿真结果. 在第60 s受到FDIA后, 未加虚拟隐含网络弹性控制器的原系统角频率剧烈震荡. 而采取虚拟隐含网络的弹性防御策略后, 有效抑制了角频率的震荡角, 角频率的波动幅值在0.1 rad/s以内, 系统运行状态在稳态范围内, 可以实现FDIA的有效防御. 图12(a)、12(b)、12(c)、12(d)、12(e)中, 在发生FDIA后, 优化后指标函数值为$ 16.7136 $的拓扑选择与值为$ 53.7803 $的拓扑选择相比, 角频率波动幅度均较大. 这表明, 图9(a)和图9(b)的拓扑结构可以更好地防御FDIA.
综上所述, 综合考虑转子角和角频率的情况, 图的可去边越多, 优化后的指标函数值越大, 防御效果越好; 图的可去边越少, 优化后的指标函数值越小, 相应的转子角或角频率波动幅度越大. 因此, 通过选择可去边多, 并且优化后的指标函数值越大的拓扑图$ \Sigma_{2} $和$ \Sigma_{{\rm{eng}}} $, 可以提高弹性防御的性能.
5. 结论和讨论
针对智能电网FDIA防御问题, 本文提出了基于连通度和权值的优化算法改善了基于虚拟隐含网络的防御性能. 首先, 针对连接网络的拓扑与二分图拉普拉斯矩阵之间无法一一对应的问题, 提出了权值分配法, 通过消除横路径, 并把横路径的权值平均分配给其他的回路边, 实现图与矩阵之间的一一对应. 其次, 分析了网络拓扑的连通度与系统可靠性之间的关系, 得出连通图可去边数量越多, 系统可靠性越高, 结构脆弱性越小的结论. 再次, 考虑了网络权值大小对控制成本的影响, 提出了考虑权值的优化指标函数, 通过最大化指标函数, 实现防御性能的优化.
本文所提的优化算法主要通过优化原电网系统与虚拟网络之间的路径来改善防御控制策略性能, 但还有一些问题需要进一步研究. 1) 本文仅仅考虑了具有双向流的电力网络, 因此, 还需进一步扩展对具有单向流−有向图的电力网络权值分配方法研究. 2) 随着电力网络规模的增大, 如何优化权值分配算法来减少其在实际应用中复杂度也是本文下一步急需解决的难点问题.
-
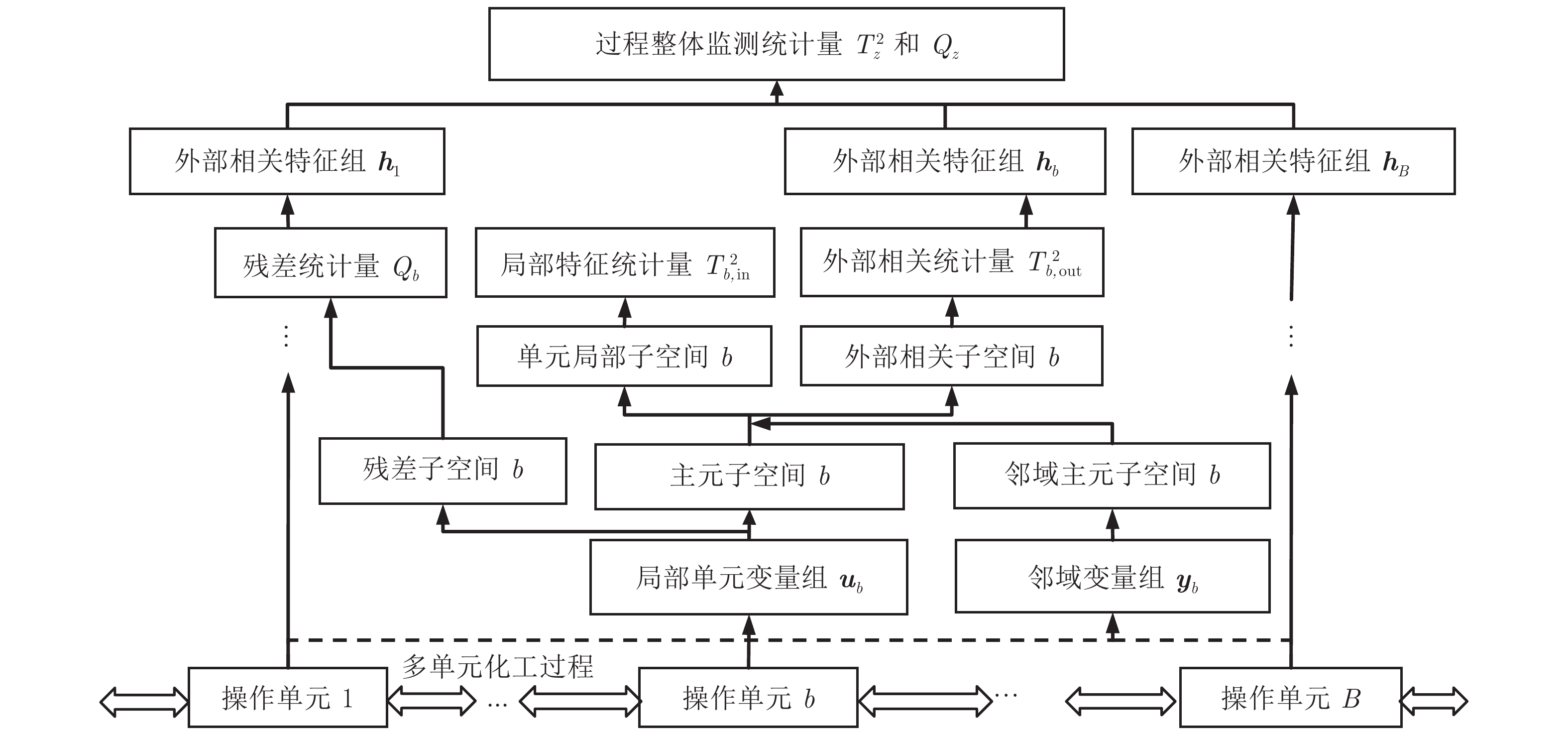
图 1 基于局部−整体相关特征的分层监测设计框架
Fig. 1 Framework of the local-global correlation feature-based hierarchical monitoring
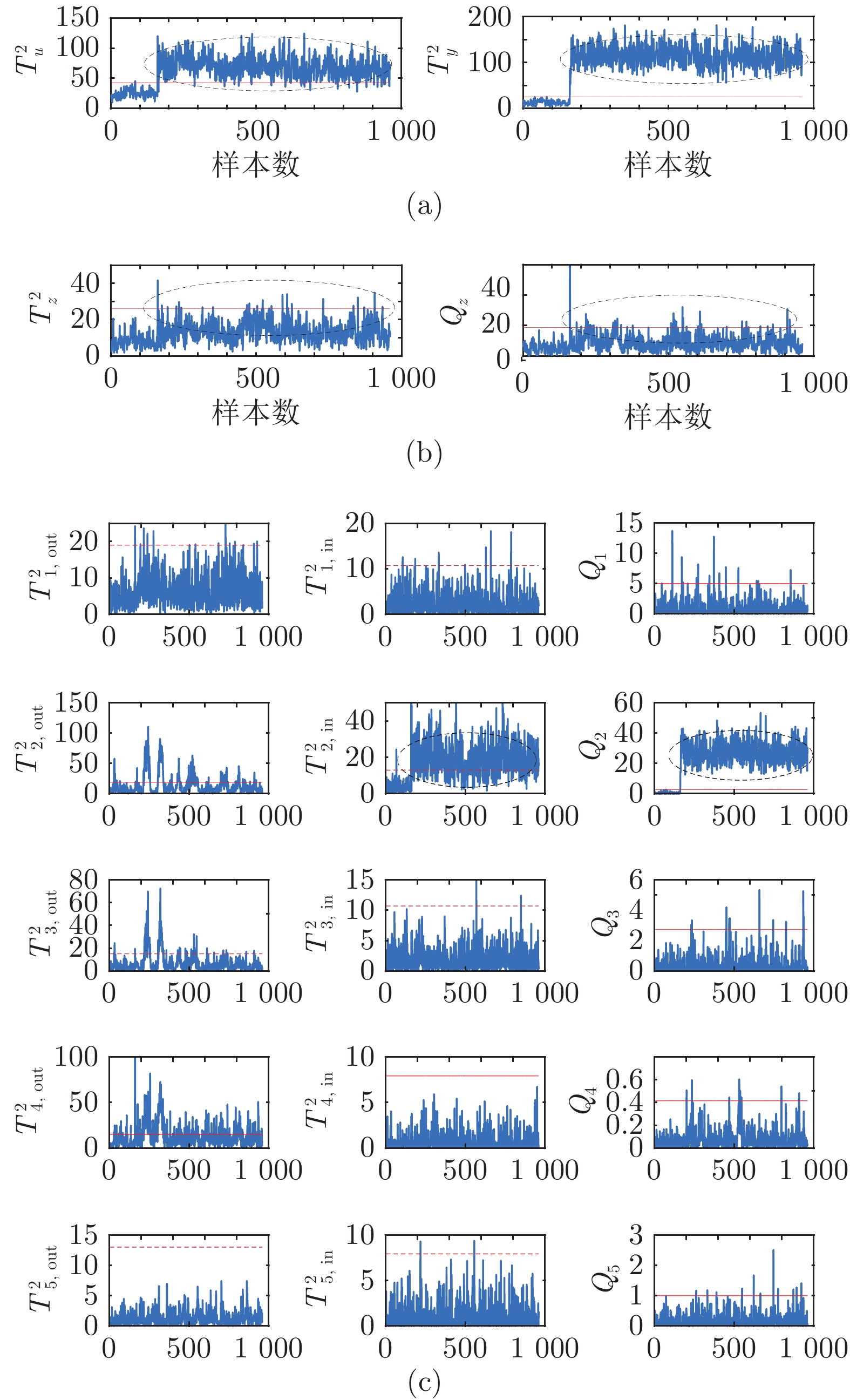
图 3 TE过程故障4的监测效果 ((a)经典CCA监测结果; (b)分层监测整体监测结果; (c)分层监测局部监测效果)
Fig. 3 Monitoring results for the TE fault 4 ((a) Conventional CCA method; (b) Global monitoring using hierarchical method; (c) Local monitoring using hierarchical method)
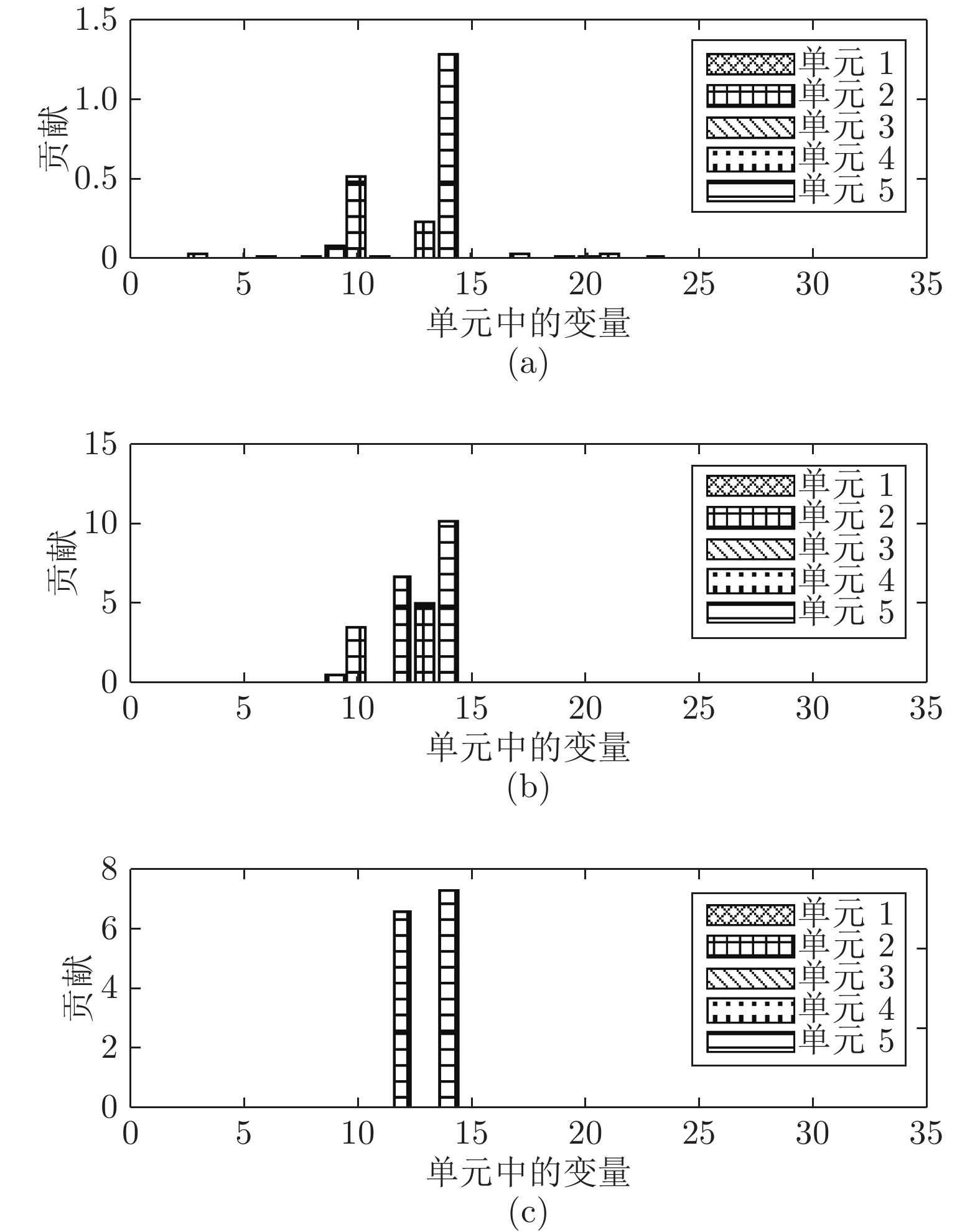
图 4 TE过程故障4的分层贡献图((a)
$T_{b,{\rm out}}^2$ ; (b)$T_{b,{\rm in}}^2$ ; (c)${Q_b}$ )Fig. 4 Contribution plots for the TE fault 4 ((a)
$T_{b,{\rm out}}^2$ ; (b)$T_{b,{\rm in}}^2$ ; (c)${Q_b}$ )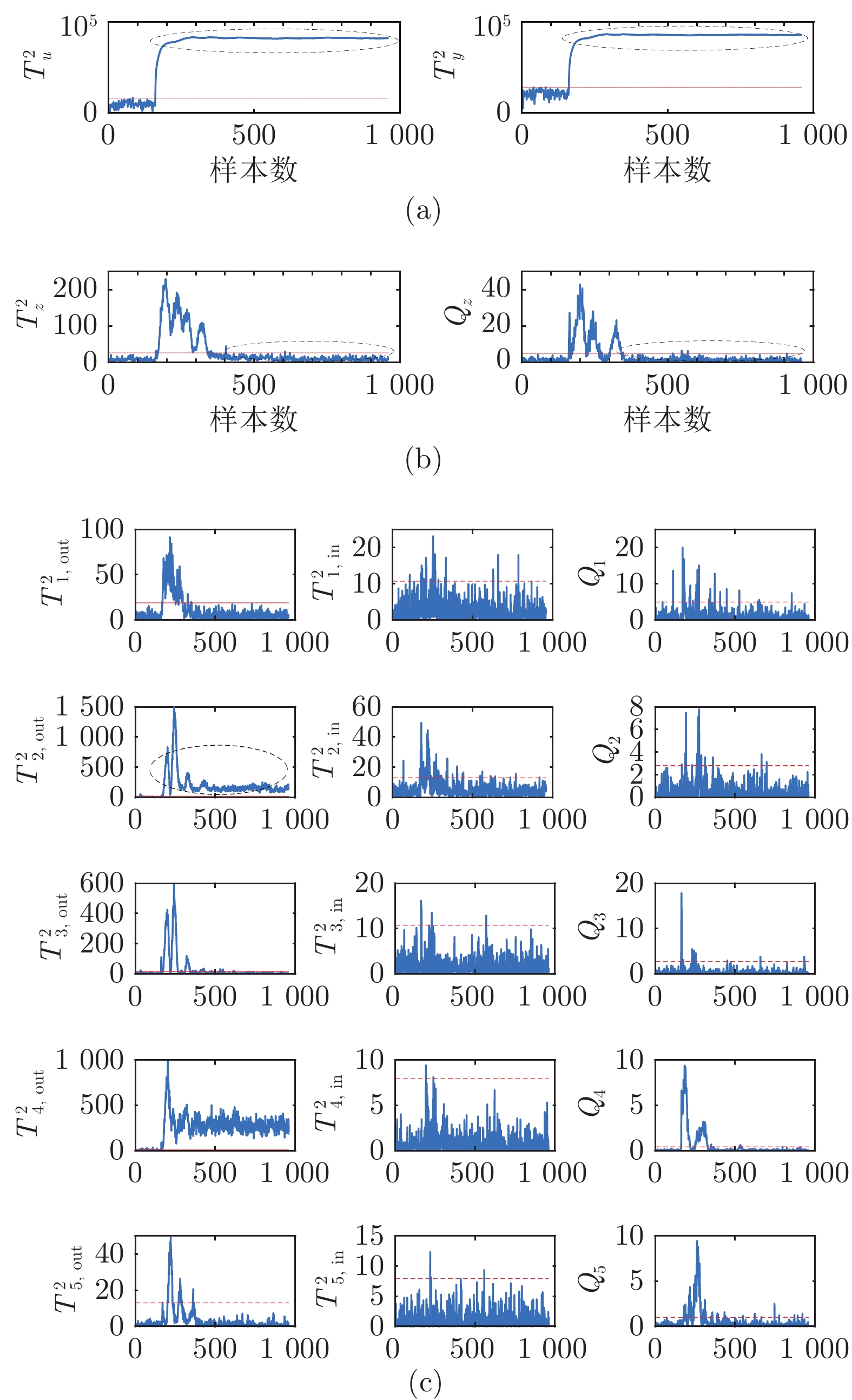
图 5 TE过程故障5的监测效果 ((a)经典CCA监测结果; (b)分层监测整体监测结果; (c)分层监测局部监测效果)
Fig. 5 Fault detection results for the TE fault 5 ((a) Conventional CCA method; (b) Global monitoring using hierarchical method; (c) Local monitoring using hierarchical method)

图 6 TE过程故障5的分层监测贡献图 ((a)
$T_z^2$ 和${Q_z}$ ; (b)$T_{b,{\rm out}}^2$ ; (c)$T_{b,{\rm in}}^2$ ; (d)${Q_b}$ ; (e)控制补偿后$T_{b,{\rm out}}^2$ )Fig. 6 Contribution plots for the TE fault 5 ((a)
$T_z^2$ and${Q_z}$ ; (b)$T_{b,{\rm out}}^2$ ; (c)$T_{b,{\rm in}}^2$ ; (d)${Q_b}$ ; (e)$T_{b,{\rm out}}^2$ after compensation)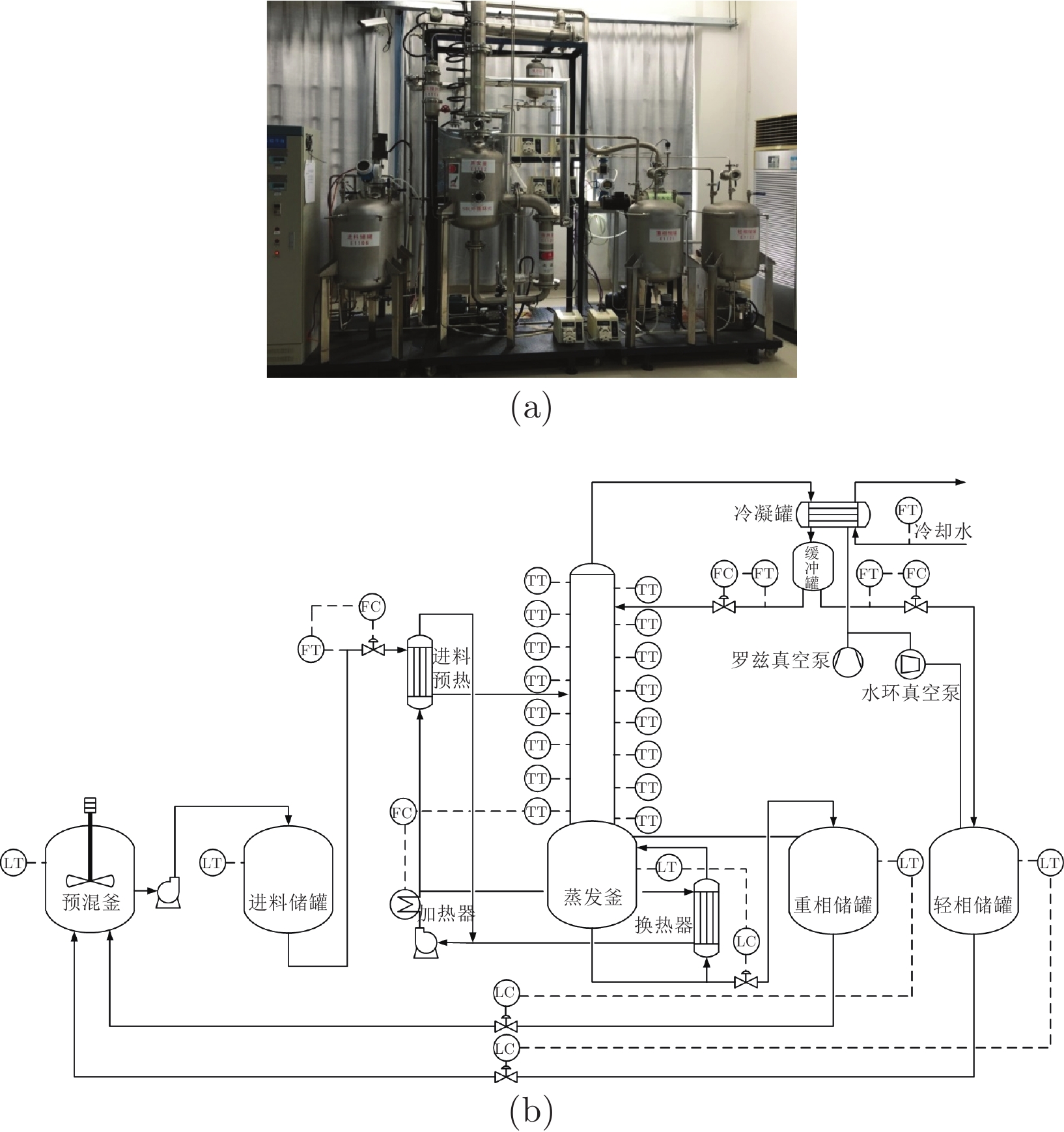
图 7 实验室甘油精馏装置与流程图((a)设备图; (b)流程图)
Fig. 7 Lab-scale glycerin distillation process ((a) Equipment diagram; (b) Simplified flowchart)
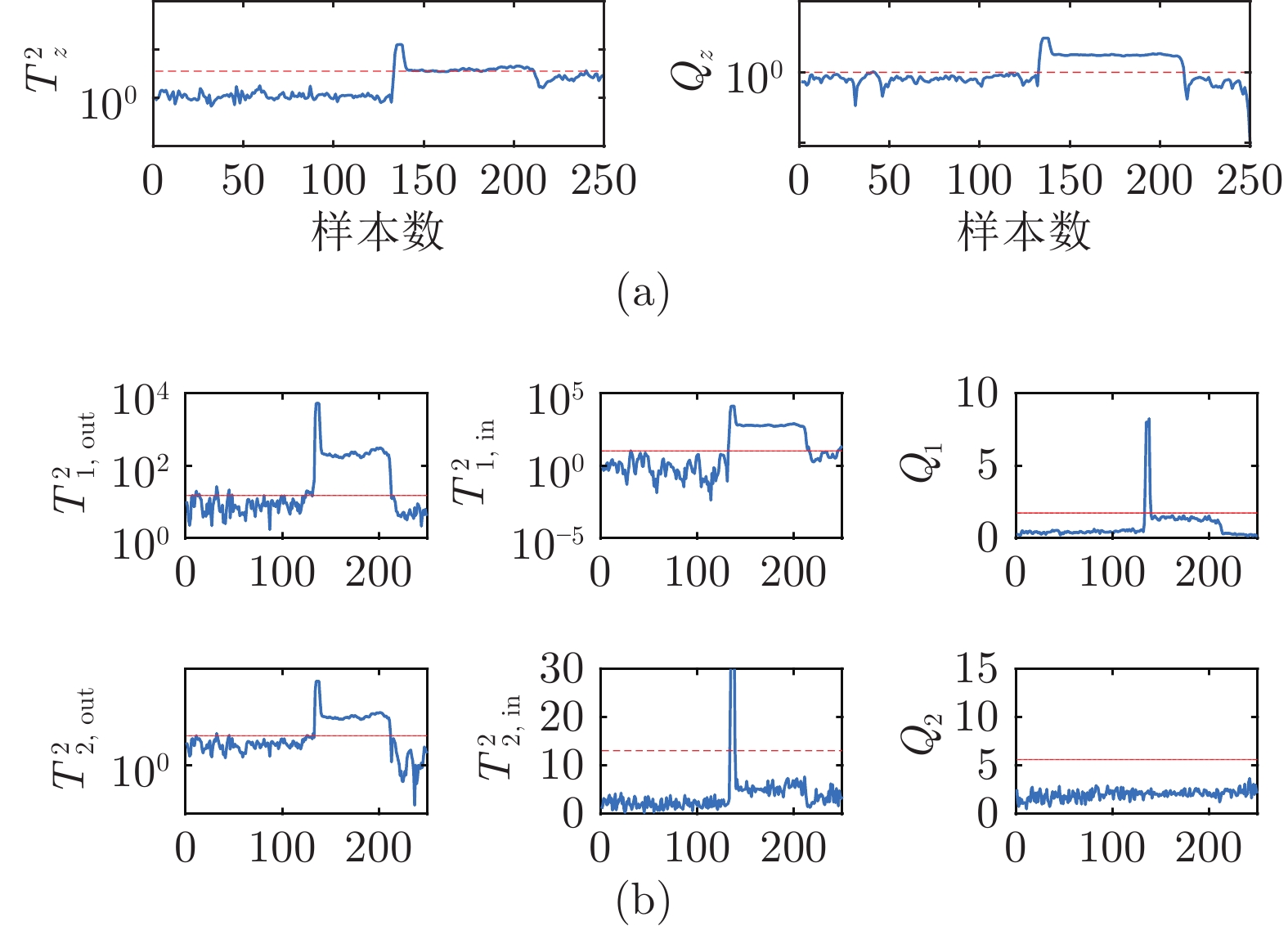
图 8 精馏过程故障1的分层故障检测效果 ((a)整体监测统计量; (b)局部监测统计量)
Fig. 8 Fault detection results for the distillation process fault 1 ((a) Global monitoring statistics; (b) Local monitoring statistics)
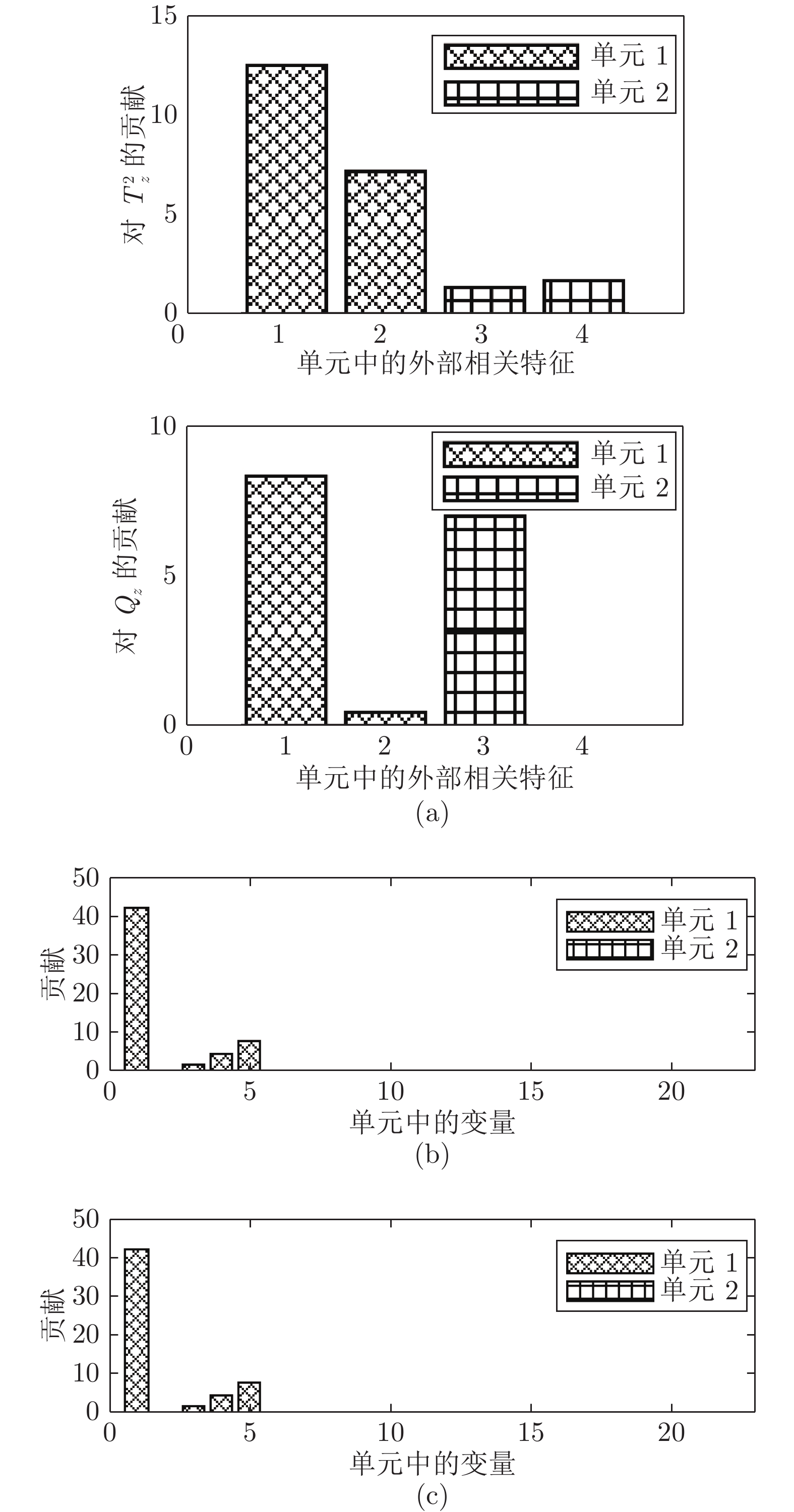
图 9 精馏过程故障1分层监测贡献图((a)
$T_z^2$ 和${Q_z}$ ; (b)$T_{b,{\rm out}}^2$ ; (c)$T_{b,{\rm in}}^2$ )Fig. 9 Contribution plots for the distillation fault 1 ((a)
$T_z^2$ and${Q_z}$ ; (b)$T_{b,{\rm out}}^2$ ; (c)$T_{b,{\rm in}}^2$ )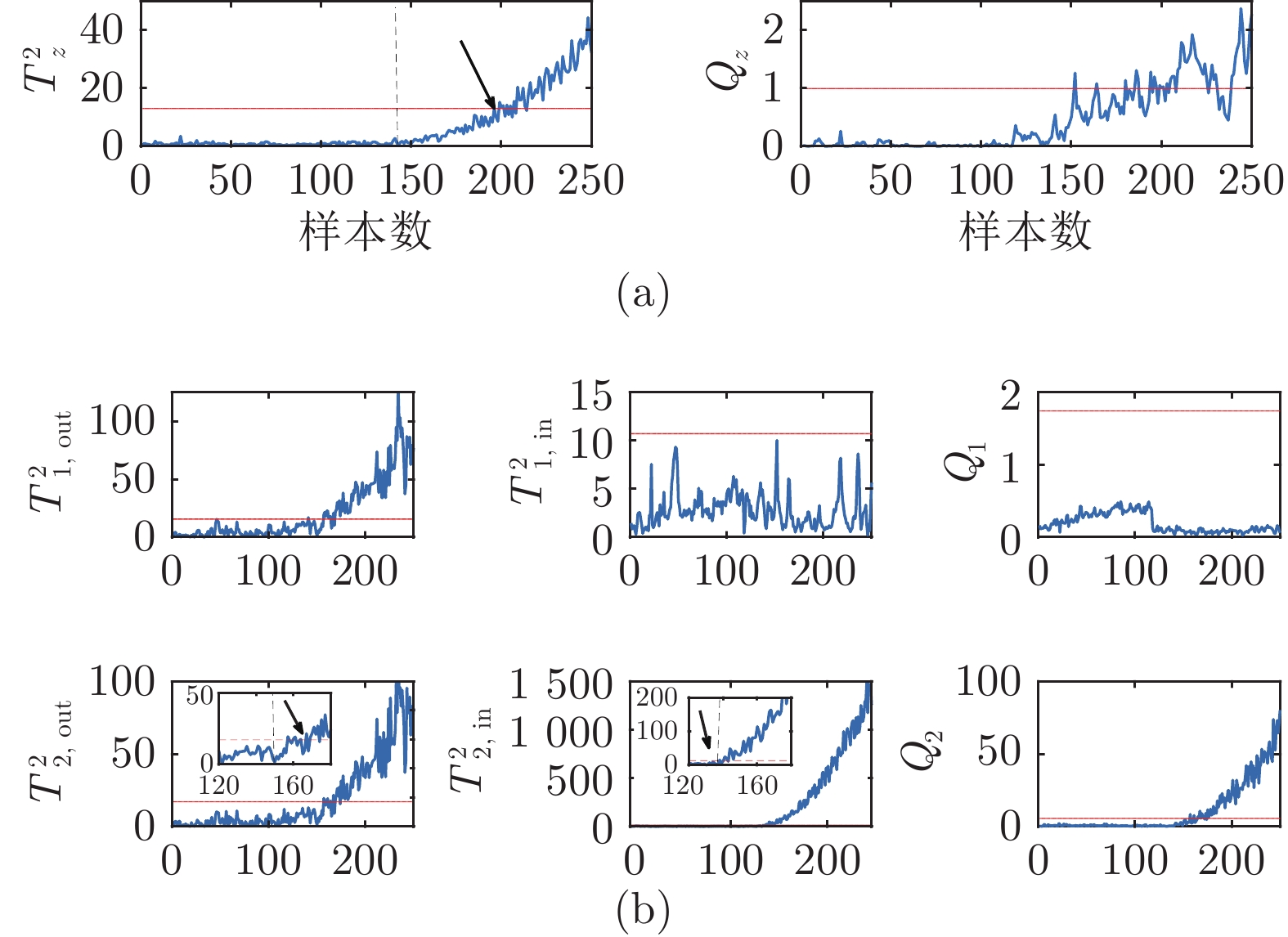
图 10 精馏过程故障2的分层故障检测效果((a)整体监测统计量; (b)局部监测统计量)
Fig. 10 Fault detection results for the distillation process fault 2 ((a) Global monitoring statistics; (b) Local monitoring statistics)
表 1 TE过程的典型操作单元和对应变量
Table 1 Operation units and corresponding variables in the TE process
单元 变量描述 变量名称 符号 进料 A 进料 (流1) XMEAS(1) $\boxed1$ D 进料 (流2) XMEAS(2) $\boxed2$ E 进料 (流3) XMEAS(3) $\boxed3$ A 和 C 进料 XMEAS(4) $\boxed4$ D 进料 XMV(1) A 进料流量 XMV(3) E 进料流量 XMV(2) A 和 C 进料流量 XMV(4) 反应器 反应器进料量 XMEAS(6) $\boxed6$ 反应器压力 XMEAS(7) $\boxed7$ 反应器液位 XMEAS(8) $\boxed8$ 反应器温度 XMEAS(9) $\boxed9$ 反应器水温 XMEAS(21) $\boxed{21}$ 反应器冷却水流量 XMV(10) 冷凝器冷却水流量 XMV(11) 分离器 分离器温度 XMEAS(11) $\boxed{11}$ 分离器液位 XMEAS(12) $\boxed{12}$ 分离器压力 XMEAS(13) $\boxed{13}$ 分离器底物流量 XMEAS(14) $\boxed{14}$ 分离器水温度 XMEAS(22) $\boxed{22}$ 分离器液流量 XMV(7) 汽提塔 汽提塔液位 XMEAS(15) $\boxed{15}$ 汽提塔压力 XMEAS(16) $\boxed{16}$ 汽提塔底物流量 XMEAS(17) $\boxed{17}$ 汽提塔温度 XMEAS(18) $\boxed{18}$ 汽提塔蒸汽流量 XMEAS(19) $\boxed{19}$ 汽提塔产物流量 XMV(8) 汽提塔蒸汽阀开度 XMV(9) 压缩 再循环流量 XMEAS(5) $\boxed5$ 排放速度 XMEAS(10) $\boxed{10}$ 压缩机功率 XMEAS(20) $\boxed{20}$ 压缩机再循环阀 XMV(5) 排放阀 XMV(6)  下载: 导出CSV
下载: 导出CSV
表 2 分层监测对于21个故障测试集的监测效果
Table 2 Hierarchical monitoring results for the 21 faults in TE process
编码 单元及过程 进料单元 反应器单元 分离器单元 汽提塔单元 压缩单元 过程整体 故障描述/统计量 $T_{1,{\rm out}}^2$ $T_{1,{\rm in}}^2$ ${Q_1}$ $T_{2,{\rm out}}^2$ $T_{2,{\rm in}}^2$ ${Q_2}$ $T_{3,{\rm out}}^2$ $T_{3,{\rm in}}^2$ ${Q_3}$ $T_{4,{\rm out}}^2$ $T_{4,{\rm in}}^2$ ${Q_4}$ $T_{5,{\rm out}}^2$ $T_{5,{\rm in}}^2$ ${Q_5}$ $T_z^2$ ${Q_z}$ 1 A/C 进料比率, B 成分不变 (阶跃) 0.99 0.31 0.04 0.77 0.26 0.06 0.44 0.04 0.07 1 0.06 0.98 0.17 0.02 0.23 1 1 2 B 成分, A/C 进料比率不变 (阶跃) 0.92 0.02 0.27 0.95 0.22 0.03 0.92 0.14 0.06 0.99 0.06 0.89 0.99 0.01 0.42 0.98 0.98 3 D 的进料温度 (阶跃) 0.01 0.01 0.01 0.32 0.02 0.00 0.14 0.01 0.00 0.20 0 0.01 0 0.01 0.09 0.01 0.02 4 反应器冷却水入口温度 (阶跃) 0.02 0.01 0.02 0.25 0.75 1 0.12 0.00 0.01 0.21 0 0.01 0 0.00 0.01 0.03 0.06 5 冷凝器冷却水入口温度 (阶跃) 0.16 0.03 0.04 0.99 0.09 0.03 0.23 0.01 0.02 1 0.00 0.19 0.07 0.00 0.13 0.22 0.18 6 A 进料损失 (阶跃) 0.99 0.91 1 1 0.98 0.96 0.98 0.82 0.98 0.99 0.96 0.97 0.99 0.92 0.99 0.99 0.99 7 C 存在压力损失 (阶跃) 0.98 1 0.87 0.98 0.22 0.09 0.38 0.03 0.04 0.76 0.01 0.22 0.24 0.01 0.27 1 0.98 8 A、B、C 进料成分 (随机) 0.78 0.10 0.16 0.97 0.48 0.13 0.90 0.03 0.35 0.94 0.11 0.68 0.87 0.02 0.61 0.97 0.89 9 D 的进料温度 (随机) 0.00 0.01 0.01 0.27 0.02 0.01 0.14 0.01 0.01 0.16 0 0.01 0 0.00 0.02 0.01 0.02 10 C 的进料温度 (随机) 0.08 0.02 0.02 0.43 0.04 0.02 0.33 0.01 0.00 0.46 0.00 0.81 0.07 0.00 0.10 0.29 0.13 11 反应器冷却水入口温度 (随机) 0.11 0.01 0.01 0.39 0.61 0.70 0.17 0.01 0.01 0.42 0.00 0.05 0 0.01 0.02 0.20 0.27 12 冷凝器冷却水入口温度 (随机) 0.74 0.22 0.25 0.95 0.60 0.29 0.94 0.28 0.65 0.96 0.06 0.89 0.34 0.03 0.83 0.96 0.91 13 反应动态 (慢偏移) 0.77 0.19 0.30 0.92 0.72 0.39 0.89 0.10 0.48 0.95 0.24 0.86 0.85 0.03 0.89 0.94 0.95 14 反应器冷却水阀门 (粘滞) 0.75 0.01 0.00 1 0.97 0.12 0.36 0.07 0.01 0.88 0.01 0.01 0.04 0.01 0.01 1 1 15 冷凝器冷却水阀门 (粘滞) 0.01 0.01 0.01 0.29 0.02 0.01 0.18 0.00 0.01 0.23 0 0.03 0.00 0.00 0.03 0.02 0.06 16 未知 0.03 0.02 0.01 0.37 0.03 0.01 0.26 0.00 0.00 0.40 0 0.85 0.03 0.01 0.05 0.15 0.11 17 未知 0.64 0.02 0.01 0.95 0.94 0.44 0.35 0.04 0.02 0.76 0.00 0.22 0.03 0.01 0.03 0.84 0.85 18 未知 0.88 0.82 0.83 0.92 0.87 0.79 0.91 0.12 0.87 0.90 0.75 0.88 0.80 0.71 0.85 0.88 0.88 19 未知 0.01 0.02 0.01 0.24 0.08 0.01 0.14 0.01 0.01 0.16 0 0.12 0.01 0.32 0.66 0.01 0.03 20 未知 0.03 0.02 0.01 0.61 0.02 0.01 0.38 0.05 0.39 0.81 0.00 0.23 0.47 0.01 0.89 0.32 0.43 21 流 4 的阀门固定在稳态位置 0.01 0.00 0.00 0.66 0.44 0.01 0.87 0.00 0.01 0.73 0.00 0.45 0.31 0.00 0.02 0.41 0.84
下载: 导出CSV
表 3 甘油精馏过程中的监测变量
Table 3 Measured variables in the distillation process
单元 1 变量名称 单元 2 变量名称 1 进料流量 1 进料储罐液位 2 灵敏板温度 2~13 塔板温度1~12 3 塔底液位 14 冷却水流量 4 塔顶回流 15 重相储灌液位 5 塔顶产品流 16 轻相储罐液位
下载: 导出CSV
-
[1] 柴天佑, 丁进良. 流程工业智能优化制造. 中国工程科学, 2018, 20(4): 51−58Chai Tian-You, Ding Jin-Liang. Smart and optimal manufacturing for process industry. Strategic Study of CAE, 2018, 20(4): 51−58 [2] 刘强, 卓洁, 郎自强, 秦泗钊. 数据驱动的工业过程运行监控与自优化研究展望. 自动化学报, 2018, 44(11): 1944−1956Liu Qiang, Zhuo Jie, Lang Zi-Qiang, Qin S Joe. Perspectives on data-driven operation monitoring and self-optimization of industrial processes. Acta Automatica Sinica, 2018, 44(11): 1944−1956 [3] 钱锋, 杜文莉, 钟伟民, 唐漾. 石油和化工行业智能优化制造若干问题及挑战. 自动化学报, 2017, 43(6): 893−901Qian Feng, Du Wen-Li, Zhong Wei-Min, Tang Yang. Problems and challenges of smart optimization manufacturing in petrochemical industries. Acta Automatica Sinica, 2017, 43(6): 893−901 [4] Qin S J. Process data analytics in the era of big data. AIChE Journal, 2014, 60(9): 3092−3100 doi: 10.1002/aic.14523 [5] 赵春晖, 余万科, 高福荣. 非平稳间歇过程数据解析与状态监控—回顾与展望, 自动化学报, 2020, DOI: 10.16383/j.aas.c190586Zhao Chun-Hui, Yu Wan-Ke, Gao Fu-Rong. Data analytics and condition monitoring methods for nonstationary batch processes—current status and future, Acta Automatica Sinica, 2020, DOI: 10.16383/j.aas.c190586 [6] Wang Y Q, Si Y B, Huang B, and Lou Z J. Survey on the theoretical research and engineering applications of multivariate statistics process monitoring algorithms: 2008–2017. The Canadian Journal of Chemical Engineering, 2018, 96(10): 2073−2085 doi: 10.1002/cjce.23249 [7] Ge Z Q. Review on data-driven modeling and monitoring for plant-wide industrial processes. Chemometrics and Intelligent Laboratory Systems, 2017, 171: 16−25 [8] Jiang Q C, Yan X F, Huang B. Review and perspectives of data-driven distributed monitoring for industrial plant-wide processes. Industrial and Engineering Chemistry Research, 2019, 58(29): 12899−12912 [9] 郭小萍, 刘诗洋, 李元. 基于稀疏残差距离的多工况过程故障检测方法研究. 自动化学报, 2019, 45(3): 617−625Guo Xiao-Ping, Liu Shi-Yang, Li Yuan. Fault detection of multi-mode processes employing sparse residual distance. Acta Automatica Sinica, 2019, 45(3): 617−625 [10] Ding S X, Data-driven Design of Fault Diagnosis and Fault-tolerant Control Systems: Springer London, 2014. [11] Zhang Y W, Zhou H, Qin S J. Decentralized fault diagnosis of large-scale processes using multiblock kernel principal component analysis. Acta Automatica Sinica, 2010, 36(4): 593−597 [12] Zhao C H, Sun H. Dynamic distributed monitoring strategy for large-scale nonstationary processes subject to frequently varying conditions under closed-loop control. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4749−4758 doi: 10.1109/TIE.2018.2864703 [13] Shang C, Ji H Q, Huang X L, Yang F, Huang D X. Generalized grouped contributions for hierarchical fault diagnosis with group Lasso. Control Engineering Practice, 2019, 93: 104193 doi: 10.1016/j.conengprac.2019.104193 [14] 邹筱瑜, 王福利, 常玉清, 王敏, 蔡庆宏. 基于分层分块结构的流程工业过程运行状态评价及非优原因追溯. 自动化学报, 2019, 45(2): 315−324Zou Xiao-Yu, Wang Fu-Li, Chang Yu-Qing, Wang Min, Cai Qing-Hong. Plant-wide process operating performance assessment and non-optimal cause identication based on hierarchical multi-block structure. Acta Automatica Sinica, 2019, 45(2): 315−324 [15] Jiang Q C, Huang B. Distributed monitoring for large-scale processes based on multivariate statistical analysis and Bayesian method. Journal of Process Control, 2016, 46: 75−83 doi: 10.1016/j.jprocont.2016.08.006 [16] 罗娜, 蒋勇, 叶贞成, 杜文莉, 钱锋. 基于集成建模方法的乙二醇全流程模拟. 化工学报, 2009, 60(1): 151−156 doi: 10.3321/j.issn:0438-1157.2009.01.022Luo Na, Jiang Yong, Ye Zhen-Cheng, Du Wen-Li, Qian Feng. Simulation of ethylene glycol process based on integrated modeling method. Chinese Journal of Chemical Engineering, 2009, 60(1): 151−156 doi: 10.3321/j.issn:0438-1157.2009.01.022 [17] 文成林, 吕菲亚, 包哲静, 刘妹琴. 基于数据驱动的微小故障诊断方法综述. 自动化学报, 2016, 42(9): 1285−1299Wen Cheng-Lin, Lv Fei-Ya, Bao Zhe-Jing, Liu Mei-Qin. A review of data driven-based incipient fault diagnosis. Acta Automatica Sinica, 2016, 42(9): 1285−1299 [18] 杨浩, 姜斌, 周东华. 互联系统容错控制的研究回顾与展望. 自动化学报, 2017, 43(1): 9−19Yang Hao, Jiang Bin, Zhou Dong-Hua. Review and perspectives on fault tolerant control for interconnected systems. Acta Automatica Sinica, 2017, 43(1): 9−19 [19] Chen Z W, Ding S X, Zhang K, Li Z B, Hu Z K. Canonical correlation analysis-based fault detection methods with application to alumina evaporation process. Control Engineering Practice, 2016, 46: 51−58 doi: 10.1016/j.conengprac.2015.10.006 [20] 曹玉苹, 黄琳哲, 田学民. 一种基于 DIOCVA 的过程监控方法. 自动化学报, 2015, 41(12): 2072−2080Cao Yu-Ping, Huang Lin-Zhe, Tian Xue-Min. A process monitoring method using dynamic input-output canonical variate analysis. Acta Automatica Sinica, 2015, 41(12): 2072−2080 [21] Shi L K, Tong C D, Lan T, Shi X H. Statistical process monitoring based on ensemble structure analysis, IEEE/CAA Journal of Automatica Sinica, 2018, DOI: 10.1109/JAS. 2017.7510877 [22] 彭开香, 马亮, 张凯. 复杂工业过程质量相关的故障检测与诊断技术综述. 自动化学报, 2017, 43(3): 349−365Peng Kai-Xiang, Ma Liang, Zhang Kai. Review of quality-related fault detection and diagnosis techniques for complex industrial processes. Acta Automatica Sinica, 2017, 43(3): 349−365 [23] Ge Z Q, Song Z H. Distributed PCA model for plant-wide process monitoring. Industrial and Engineering Chemistry Research, 2013, 52(5): 1947−1957 [24] Liu Q, Qin S J, Chai T Y. Multiblock concurrent PLS for decentralized monitoring of continuous annealing processes. IEEE Transactions on Industrial Electronics, 2014, 61(61): 6429−6437 [25] Qin S J, Valle S, Piovoso M J. On unifying multiblock analysis with application to decentralized process monitoring. Journal of Chemometrics, 2001, 15(9): 715−742 doi: 10.1002/cem.667 [26] Ge Z Q. Quality prediction and analysis for large-scale processes based on multi-level principal component modeling strategy. Control Engineering Practice, 2014, 31(1): 9−23 [27] Jiang Q C, Ding S X, Wang Y, Yan X F. Data-driven distributed local fault detection for large-scale processes based on the GA-regularized canonical correlation analysis. IEEE Transactions on Industrial Electronics, 2017, 64(10): 8148−8157 doi: 10.1109/TIE.2017.2698422 [28] Wang Y, Jiang Q C, Yan X F, Fu J Q. Joint-individual monitoring of large-scale chemical processes with multiple interconnected operation units incorporating multiset CCA. Chemometrics and Intelligent Laboratory Systems, 2017, 166: 14−22 [29] Zhu J L, Ge Z Q, Song Z H. Distributed parallel PCA for modeling and monitoring of large-scale plant-wide processes with big data. IEEE Transactions on Industrial Informatics, 2017, 13(4): 1877−1885 doi: 10.1109/TII.2017.2658732 [30] Jiang Q C, Yan X F, Huang B. Performance-driven distributed PCA process monitoring based on fault-relevant variable selection and Bayesian inference. IEEE Transactions on Industrial Electronics, 2015, 63(1): 377−386 [31] Jiang B B, Huang D X, Zhu X X, Yang F, Richard D Braatz. Canonical variate analysis-based contributions for fault identification. Journal of Process Control, 2015, 26: 17−25 doi: 10.1016/j.jprocont.2014.12.001 [32] Westerhuis J A, Gurden S P, Smilde A K. Generalized contribution plots in multivariate statistical process monitoring. Chemometrics and Intelligent Laboratory Systems, 2000, 51(1): 95−114 [33] Kerkhof P, Vanlaer J, Gins G, Impe J. Analysis of smearing-out in contribution plot based fault isolation for statistical process control. Chemical Engineering Science, 2013, 104: 285−293 doi: 10.1016/j.ces.2013.08.007 [34] Yan Z B, Yao Y. Variable selection method for fault isolation using least absolute shrinkage and selection operator (LASSO). Chemometrics and Intelligent Laboratory Systems, 2015, 146: 136−146 [35] Chen Z W, Ding S X, Peng T, Yang C H, Gui W H. Fault detection for non-Gaussian processes ssing generalized canonical correlation analysis and randomized algorithms. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1559−1567 doi: 10.1109/TIE.2017.2733501 [36] Jiang Q C, Gao F R, Yi H, Yan X F. Multivariate statistical monitoring of key operation units of batch processes based on time-slice CCA. IEEE Transactions on Control Systems Technology, 2019, 27(3): 1368−1375 doi: 10.1109/TCST.2018.2803071 [37] Jiang Q C, Yan X F. Learning deep correlated representations for nonlinear process monitoring. IEEE Transactions on Industrial Informatics, 2019, 15(12): 6200−6209 doi: 10.1109/TII.2018.2886048 [38] Jiang Q C, Yan X F. Multimode process monitoring using variational Bayesian inference and canonical correlation analysis. IEEE Transactions on Automation Science and Engineering, 2019, 16(4): 1814−1824 doi: 10.1109/TASE.2019.2897477 [39] Yin S, Luo H, Ding S X. Real-time implementation of fault-tolerant control systems with performance optimization. IEEE Transactions on Industrial Electronics, 2014, 61(5): 2402−2411 doi: 10.1109/TIE.2013.2273477 [40] Downs J J, Vogel E F. A plant-wide industrial process control problem. Computers and Chemical Engineering, 1993, 17(3): 245−255 [41] Chiang L H, Russell E L, Braatz R D, Fault detection and diagnosis in industrial systems: Springer Science and Business Media, London, 2000. 期刊类型引用(7)
1. 钟林生,常玉清,王福利,高世红. 基于慢特征分析的分布式动态工业过程运行状态评价. 自动化学报. 2024(04): 745-757 .  本站查看
本站查看2. 刘金平,匡亚彬,赵爽爽,杨广益. 长短滑窗慢特征分析与时序关联规则挖掘的过渡过程识别. 智能系统学报. 2023(03): 589-603 . 百度学术3. 徐佳昀,吕立华,蒋嘉石,施逸非,姜庆超,颜学峰. 数据驱动弹簧钢脱碳影响要素分析与质量预测. 冶金自动化. 2022(05): 103-111 . 百度学术4. 赵春晖,胡赟昀,郑嘉乐,陈军豪. 数据驱动的燃煤发电装备运行工况监控——现状与展望. 自动化学报. 2022(11): 2611-2633 . 本站查看5. 苏树智,谢军,平昕瑞,高鹏连. 图强化典型相关分析及在图像识别中的应用. 电子与信息学报. 2021(11): 3342-3349 . 百度学术6. 陈路,郑丹,童楚东. 基于核函数及参数优化的KPLS质量预测研究. 电子技术应用. 2021(12): 100-104 . 百度学术7. 张化光,孙宏斌,刘德荣,王剑辉,孙秋野. “分布式信息能源系统”专题特约主编寄语. 中国电机工程学报. 2020(17): 5401-5403 . 百度学术其他类型引用(4)
-

 下载:
下载:































































计量
- 文章访问数: 1636
- HTML全文浏览量: 767
- PDF下载量: 331
- 被引次数: 11
