

Intelligent Ship Integrated Energy System and Its Distributed Optimal Scheduling Algorithm
-
摘要: 船舶航运污染是阻碍海洋经济发展、海洋强国建设的瓶颈问题. 智能船舶为航运业绿色环保发展提供了重要手段. 为进一步开发船载新能源, 提升能源综合利用效率, 降低船舶航运污染排放, 本文构建以能量优化调度系统为核心、以能源转换中心为枢纽的智能船舶综合能源系统; 考虑其特有的动力系统负荷需求、航行低污染排放量标准以及电−热多能流耦合供能特性, 建立智能船舶综合能源系统能量优化调度目标函数及相关约束条件; 并基于宽度学习、带有广义噪声的多智能体分布式优化相关理论, 提出可快速准确地预测全航程各时段负荷需求、可容纳复杂干扰的分布式优化调度方法, 实现高效的智能船舶综合能源系统能量优化调度, 保障智能船舶经济、可靠、稳定航行. 仿真分析验证了所提出智能船舶综合能源系统分布式优化调度方法的有效性.Abstract: Shipping pollution seriously hinders the development of marine economy and becomes a key bottleneck in the construction of a powerful marine country. The emergence of intelligent ship provides an important means for the green maritime transportation and sustainable development of shipping industry. In order to further develop new energy on board, improve the comprehensive energy efficiency and reduce the emission of shipping pollution, this paper takes the energy conversion center as the hub and constructs the model of intelligent ship integrated energy system cored with the energy optimal scheduling system. Simultaneously, the objective function and relevant constraints of energy optimal scheduling, of the intelligent ship integrated energy system are established in the conditions of the special dynamical system's load demand, low pollution emission standard of navigation and the electrothermal coupling supply characteristics. On the other hand, combined with broad learning and multi-agent distributed optimization theory with generalized noise, a distributed optimal scheduling method is proposed. This method can not only predict the load demand of all periods of the whole voyage quickly and accurately, but also accommodate complex noises, which can realize the efficient energy optimal scheduling of the intelligent ship integrated energy system and ensure the economic, reliable and stable navigation of the intelligent ship. Finally, the simulation results show the effectiveness of the proposed distributed optimal scheduling method.
-
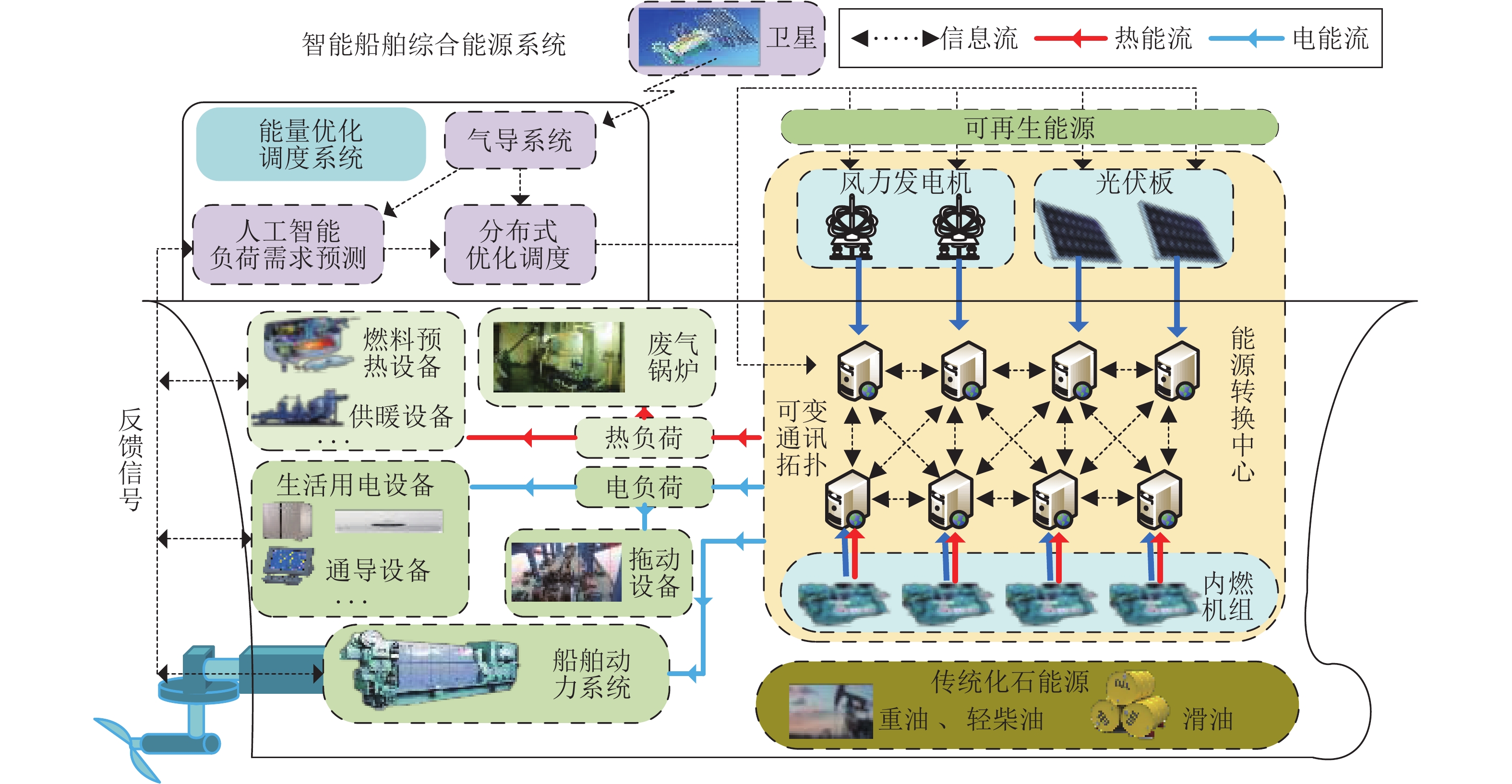
图 1 智能船舶综合能源系统基本结构框图
Fig. 1 The typical architecture of intelligent ship integrated energy system
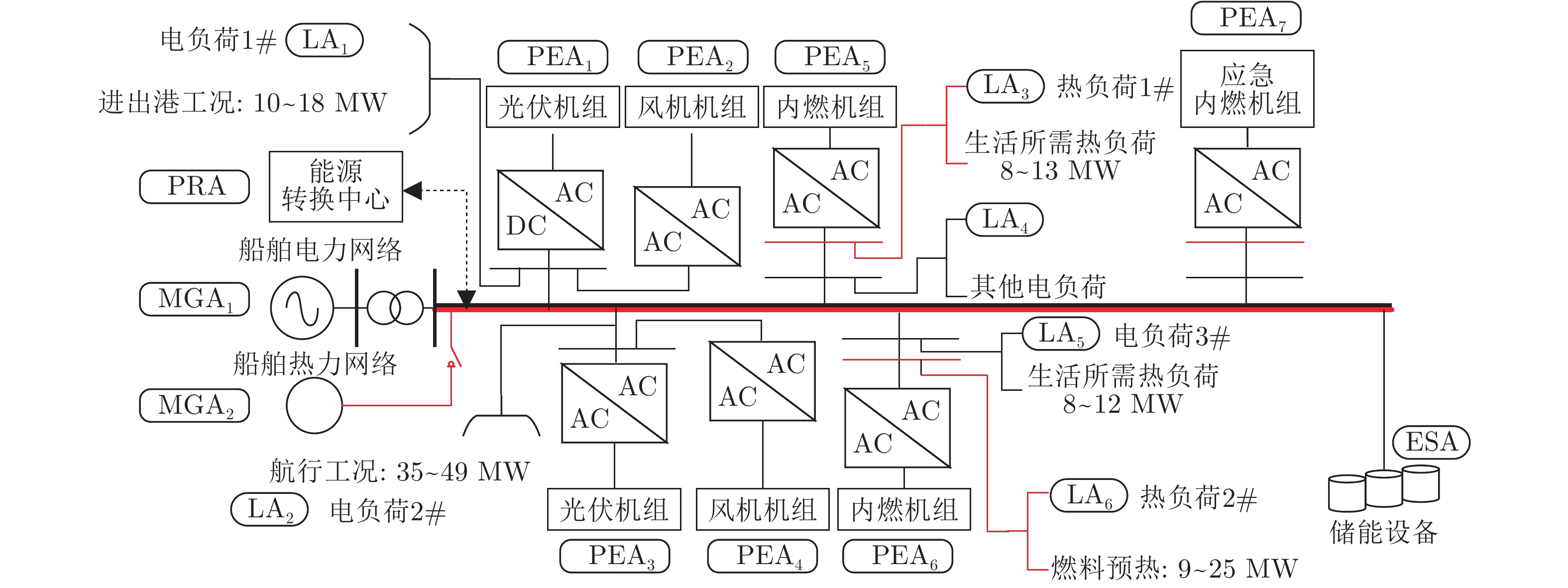
图 2 智能船舶综合能源系统仿真模型
Fig. 2 The simulation model of intelligent ship integrated energy system
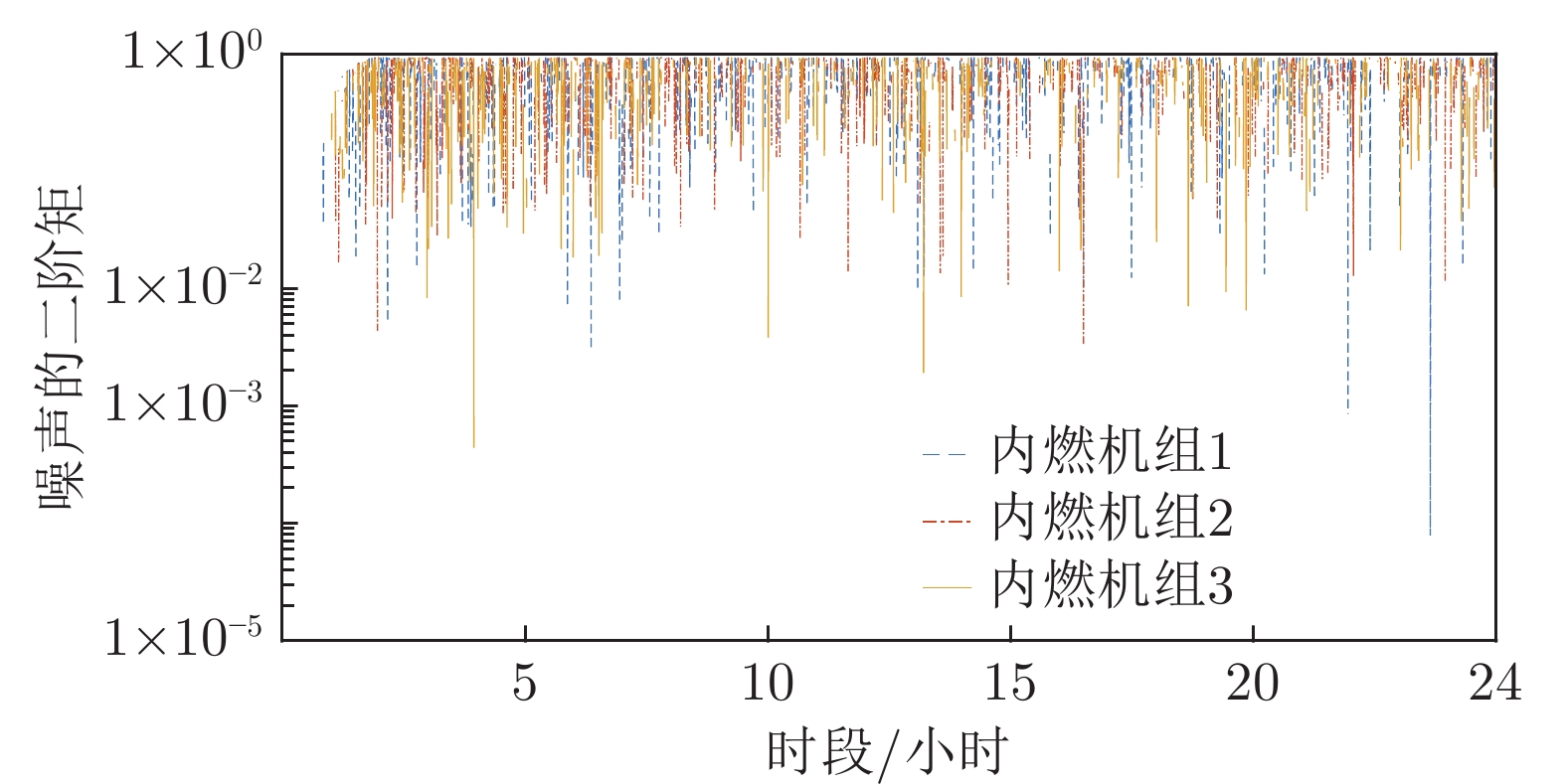
图 3 智能船舶综合能源系统全航程分布式优化调度考虑的广义噪声干扰
Fig. 3 The general noise considered in the distributed optimal scheduling during the whole voyage of intelligent ship integrated energy system
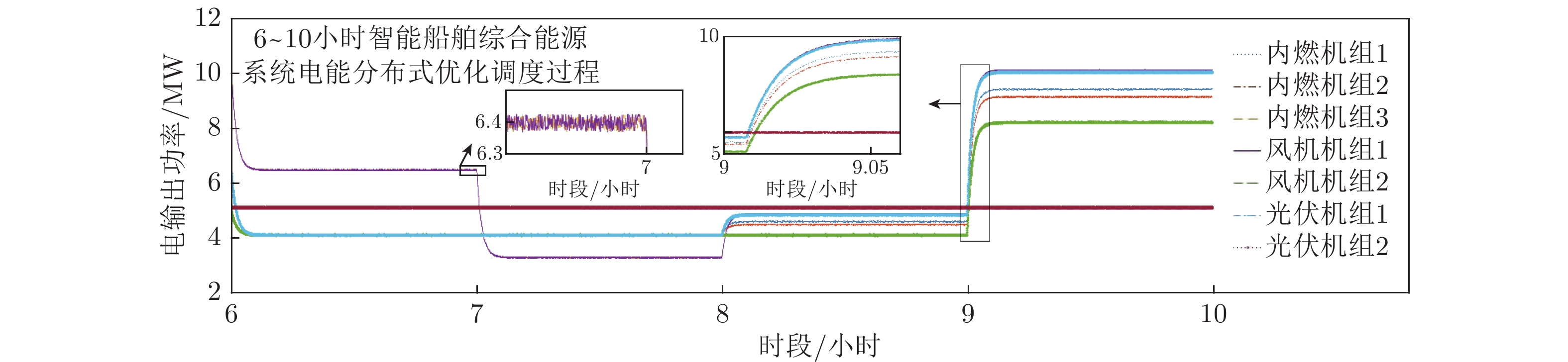
图 4 船舶航行
$6\sim 10 $ 小时时段各供能设备电输出功率Fig. 4 Electricity output of each energy supply equipment during
$6\sim 10 $ hours sailing
图 5 船舶航行
$6\sim 10 $ 小时时段各供能设备热输出功率Fig. 5 Heat output of each energy supply equipment during
$6\sim 10 $ hours sailing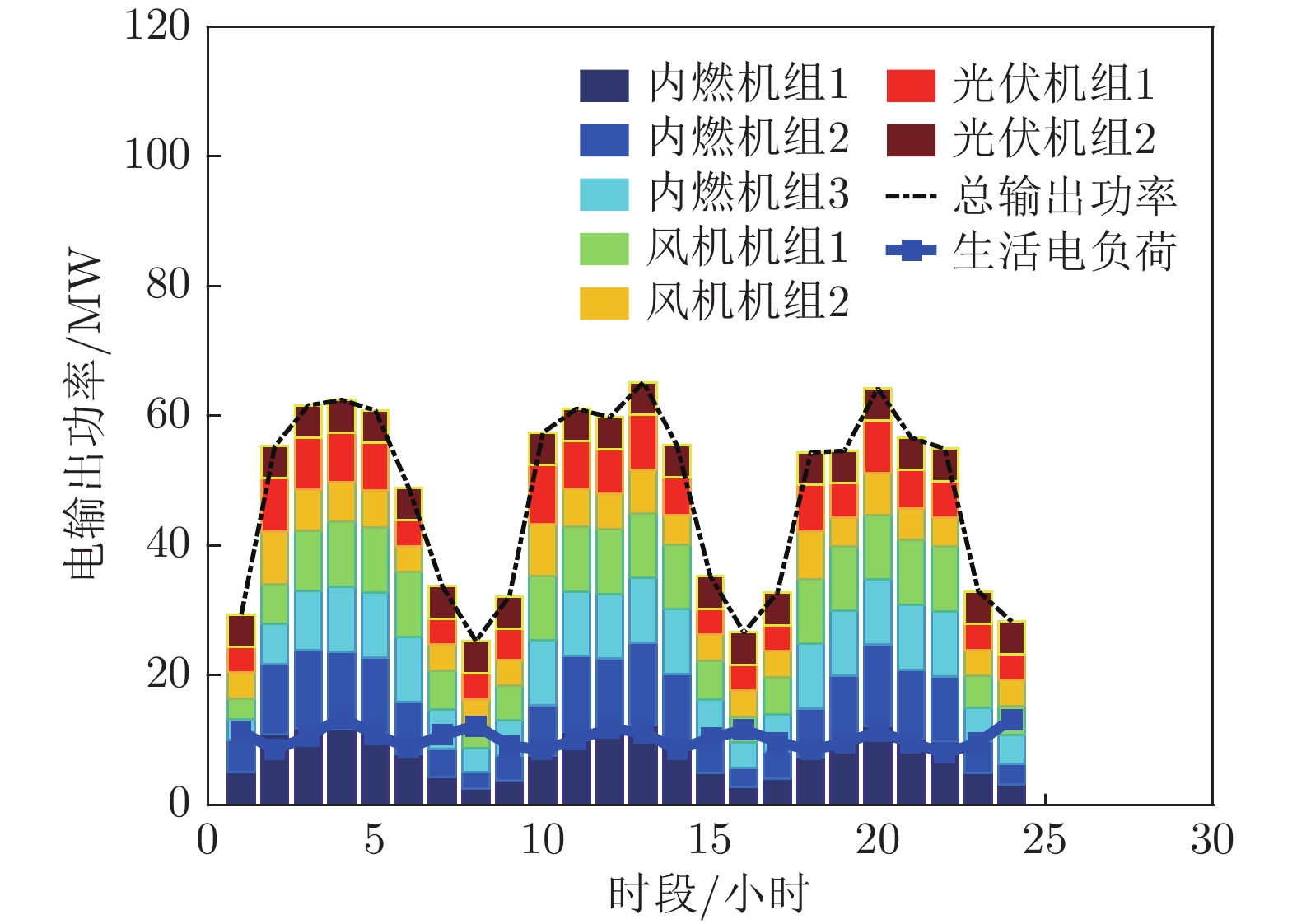
图 6 智能船舶航行航线全航程各时段各供能设备最优电输出功率
Fig. 6 The optimal electricity output of each energy supply equipment of intelligent ship in different periods of the whole voyage
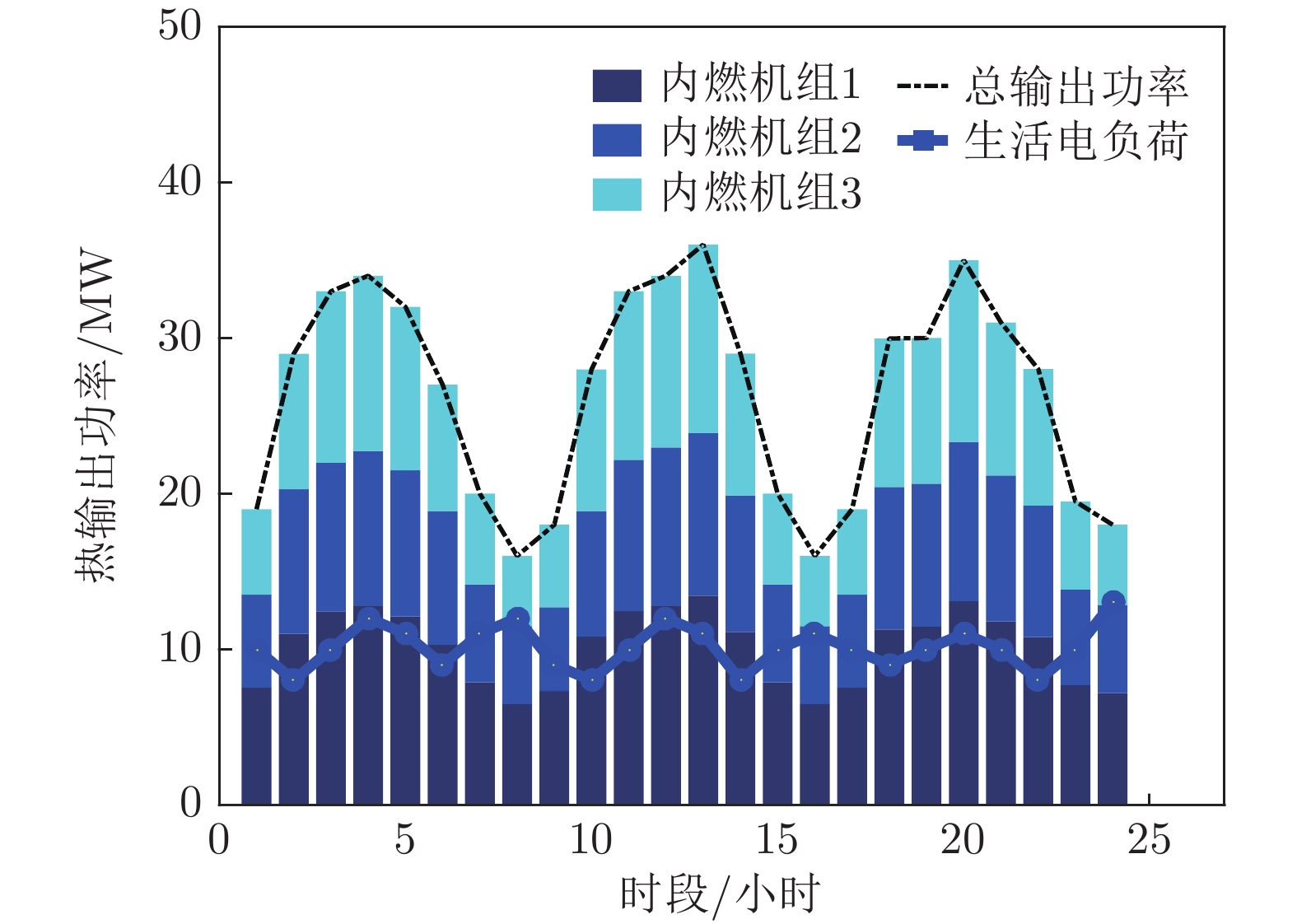
图 7 智能船舶航行航线全航程各时段各供能设备最优热输出功率
Fig. 7 The optimal heat output of each energy supply equipment of intelligent ship in different periods of the whole voyage
表 1 智能船舶全航程各时段电−热负荷预测结果
Table 1 The forecast results of electric and thermal load of intelligent ship in different periods of the whole voyage
全航程各时段热
负荷预测量 (MW)1小时 2小时 3小时 4小时 5小时 6小时 7小时 8小时 9小时 10小时 11小时 12小时 19.0000 28.9889 33.0000 34.0000 32.0000 27.0000 20.0000 16.0000 18.0000 27.9780 33.0000 34.0000 13小时 14小时 15小时 16小时 17小时 18小时 19小时 20小时 21小时 22小时 23小时 24小时 36.0000 29.0000 20.0000 16.0000 19.0000 29.9671 30.0000 35.0000 31.0000 28.0000 19.4957 18.0000 全航程各时段电
负荷预测量 (MW)1小时 2小时 3小时 4小时 5小时 6小时 7小时 8小时 9小时 10小时 11小时 12小时 29.3600 55.3255 61.6100 62.4300 60.8300 48.8500 33.7300 25.2500 32.1600 57.3885 61.0800 59.7900 13小时 14小时 15小时 16小时 17小时 18小时 19小时 20小时 21小时 22小时 23小时 24小时 65.1800 55.4800 35.2500 26.6000 32.7000 54.3629 54.5900 64.2400 56.6100 54.9300 32.9039 28.2700  下载: 导出CSV
下载: 导出CSV
-
[1] 十八大之海洋强国战略[Online], available: https://www.sohu.com/a/195834582_811190, 2017年10月1日Sea Strategic thought at the 18th CPC National Congress [Online], available: https://www.sohu.com/a/195834582_811190, October 1, 2017 [2] 十九大报告全文[Online], available: http://sh.people.com.cn/n2/2018/0313/c134768-31338145.html, 2018年3月13日The 19th National Congress of the Communist Party of China [Online], available: http://sh.people.com.cn/n2/2018/0313/c134768-31338145.html, March 13, 2018 [3] 国务院印发《中国制造2050》[Online], available: http://www.gov.cn/zhengce/content/2015-05/19/content_9784.htm, 2015年5月19日Notice of the State Council on Issuing the “Made in China (2025)” [Online], available: http://www.gov.cn/zhengce/con-tent/2015-05/19/content_9784.htm, May 19, 2015 [4] IMO签署协议: 2050年海运业碳排放量减少一半[Online], available: http://www.tanpaifang.com/jienenjianpai/2018/0416/61777.html, 2018年4月16日IMO Signed an Agreement to Halve Carbon Emissions of Shipping Industry in 2050 [Online], available: http://www.tanpaifang.com/jienenjianpai/2018/0416/61777.html, April 16, 2018 [5] 范爱龙, 贺亚鹏, 严新平, 王骏腾. 智能新能源船舶的概念及关键技术. 船舶工程, 2020, 42(3): 9−14Fan Ai-Long, He Ya-Peng, Yan Xin-Ping, Wang Jun-Teng. Concept and key technologies of intelligent new energy ship. Ship Engineering, 2020, 42(3): 9−14 [6] Tsekouras G J, Kanellos F D, Prousalidis J. Simplified method for the assessment of ship electric power systems operation cost reduction from energy storage and renewable energy sources integration. IET Electrical Systems in Transportation, 2015, 5(2): 61−69 doi: 10.1049/iet-est.2013.0011 [7] Michalopoulos P, Kanellos F D, Tsekouras G J, Prousalidis J M. A method for optimal operation of complex ship power systems employing shaft electric machines. IEEE Transactions on Transportation Electrification, 2016, 2(4): 547−557 doi: 10.1109/TTE.2016.2572093 [8] Khooban M H, Dragicevic T, Blaabjerg F, Delimar M. Shipboard microgrids: A novel approach to load frequency control. IEEE Transactions on Sustainable Energy, 2018, 9(2): 843−852 doi: 10.1109/TSTE.2017.2763605 [9] 贾宏杰, 王丹, 徐宪东, 余晓丹. 区域综合能源系统若干问题研究. 电力系统自动化, 2015, 39(7): 198−207Jia Hong-Jie, Wang Dan, Xu Xian-Dong, Yu Xiao-Dan. Research on some key problems related to integrated energy systems. Automation of Electric Power Systems, 2015, 39(7): 198−207 [10] 孙秋野, 滕菲, 张化光. 能源互联网及其关键控制问题. 自动化学报, 2017, 43(2): 176−194Sun Qiu-Ye, Teng Fei, Zhang Hua-Guang. Energy internet and its key control issues. Acta Automatica Sinica, 2017, 43(2): 176−194 [11] 孙宏斌, 潘昭光, 郭庆来. 多能流能量管理研究: 挑战与展望. 电力系统自动化, 2016, 40(15): 1−8 doi: 10.7500/AEPS20160522006Sun Hong-Bin, Pan Zhao-Guang, Guo Qing-Lai. Energy management for multi-energy flow: challenges and prospects. Automation of Electric Power Systems, 2016, 40(15): 1−8 doi: 10.7500/AEPS20160522006 [12] 郭创新, 王惠如, 张伊宁, 何宇斌. 面向区域能源互联网的“源—网—荷”协同规划综述. 电网技术, 2019, 43(9): 3071−3080Guo Chuang-Xin, Wang Hui-Ru, Zhang Yi-Ning, He Yu-Bin. Review of “source-grid-load” co-planning orienting to regional energy internet power system technology. Power System Technology, 2019, 43(9): 3071−3080 [13] 王佳颖, 史俊祎, 文福拴, 李继红, 张利军, 徐晨博. 计及需求响应的光热电站热电联供型微网的优化运行. 电力系统自动化, 2019, 43(1): 176−189Wang Jia-Ying, Shi Jun-Yi, Wen Fu-Shuan, Li Ji-Hong, Zhang Li-Jun, Xu Chen-Bo. Optimal operation of CHP microgrid with concentrating solar power plants considering demand response. Automation of Electric Power Systems, 2019, 43(1): 176−189 [14] 孙宏斌, 郭庆来, 吴文传, 王彬, 夏天. 面向能源互联网的多能流综合能量管理系统: 设计与应用. 电力系统自动化, 2019, 43(12): 122−128, 171 doi: 10.7500/AEPS20190228003Sun Hong-Bin, Guo Qing-Lai, Wu Wen-Chuan, Wang Bin, Xia Tian. Integrated energy management system with multi-agent flow for energy internet: design and application. Automation of Electric Power Systems, 2019, 43(12): 122−128, 171 doi: 10.7500/AEPS20190228003 [15] 唐昊, 刘畅, 杨明, 汤必强, 许丹, 吕凯. 考虑电网调峰需求的工业园区主动配电系统调度学习优化. 自动化学报, DOI: 10.16383/j.aas.c190079, 2019.Tang Hao, Liu Chang, Yang Ming, Tang Bi-Qiang, Xu Dan, Lv Kai. Learning-based optimization of active distribution system dispatch in industrial park considering the peak operation demand of power grid. Acta Automatica Sinica, DOI: 10.16383/j.aas.c190079, 2019. [16] 陈刚, 李志勇. 集合约束下多智能体系统分布式固定时间优化控制. 自动化学报, DOI: 10.16383/j.aas.c190416, 2019.Chen Gang, Li Zhi-Yong. Distributed fixed-time optimization control for multi-agent systems with set constraints. Acta Automatica Sinica, DOI: 10.16383/j.aas.c190416, 2019. [17] 殷爽睿, 艾芊, 曾顺奇, 吴琼, 郝然, 江迪. 能源互联网多能分布式优化研究挑战与展望. 电网技术, 2018, 42(5): 1359−1369Yin Shuang-Rui, Ai Qian, Zeng Shun-Qi, Wu Qiong, Hao Ran, Jiang Di. Challenges and prospects of multi-energy distributed optimization for Energy Internet. Power System Technology, 2018, 42(5): 1359−1369 [18] 席磊, 周礼鹏.分布式多区域多能微网群协同AGC 算法. 自动化学报, DOI: 10.16383/j.aas.c200105, 2020.Xi Lei, Zhou Li-Peng. Coordinated AGC algorithm for distributed multi-region multi-energy micro-network group. Acta Automatica Sinica, DOI: 10.16383/j.aas.c200105, 2020. [19] Yang S P, Tan S C, Xu J X. Consensus based approach for economic dispatch problem in a smart grid. IEEE Transactions on Power Systems, 2013, 28(4): 4416−4426 doi: 10.1109/TPWRS.2013.2271640 [20] Guo F H, Wen C Y, Mao J F, Song Y D. Distributed economic dispatch for smart grids with random wind power. IEEE Transactions on Smart Grid, 2016, 7(3): 1572−1583 doi: 10.1109/TSG.2015.2434831 [21] Binetti G, Davoudi A, Lewis F L, Naso D, Turchiano B. Distributed consensus-based economic dispatch with transmission losses. IEEE Transactions on Power System, 2014, 29(4): 1711−1720 doi: 10.1109/TPWRS.2014.2299436 [22] Wang Z G, Wu W C, Zhang B M. A fully distributed power dispatch method for fast frequency recovery and minimal generation cost in autonomous microgrids. IEEE Transactions on Smart Grid, 2016, 7(1): 19−31 doi: 10.1109/TSG.2015.2493638 [23] Chen G, Ren J H, Feng E N. Distributed finite-time economic dispatch of a network of energy resources. IEEE Transactions on Smart Grid, 2017, 8(2): 822−832 [24] Zhang H G, Li Y S, Gao D W Z, Zhou J G. Distributed optimal energy management for energy internet. IEEE Transactions on Industrial Informatics, 2017, 13(6): 3081−3097 doi: 10.1109/TII.2017.2714199 [25] Kanellos F D, Tsekouras G J, Hatziargyriou N D. Optimal demand-side management and power generation scheduling in an all-electric ship. IEEE Transactions on Sustainable Energy, 2014, 5(4): 1166−1175 doi: 10.1109/TSTE.2014.2336973 [26] Chen C L P, Liu Z L. Broad learning system: an effective and efficient incremental learning system without the need for deep architecture. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(1): 10−24 doi: 10.1109/TNNLS.2017.2716952 [27] Yang S F, Liu Q S, Wang J. A multi-agent system with a proportional-integral protocol for distributed constrained optimization. IEEE Transactions on Automatic Control, 2017, 62(7): 3461−3467 doi: 10.1109/TAC.2016.2610945 [28] Zhang H G, Teng F, Sun Q Y, Shan Q H. Distributed optimization based on a multiagent system disturbed by genera noise. IEEE Transactions on Cybernetics, 2019, 49(8): 3209−3213 doi: 10.1109/TCYB.2018.2839912 -

 下载:
下载:





计量
- 文章访问数: 2671
- HTML全文浏览量: 1482
- PDF下载量: 469
- 被引次数: 0
