

A Novel Autonomous Vehicle Trajectory Planning and Control Model for Connected-and-Autonomous Intersections
-
摘要: 自动驾驶环境下的交叉口基于车车/车路之间的双向信息交互, 能保障自动驾驶车辆相互穿插与协作地通过交叉口, 而无需信号灯控制. 因此, 如何设计高效的面向自动驾驶车辆通行的交叉口管控模型, 已成为研究的热点. 已有研究在建模时, 均基于自动驾驶车辆在交叉口内部的行驶路径已知并作为模型输入, 且大多对交叉口内部的冲突点进行简化. 本文首先将交叉口空间离散化处理, 考虑车辆的实际尺寸并面向非常规交叉口, 使用椭圆曲线建立转弯车辆行驶路径的精确轨迹方程, 再通过外边界投影降维法建立轨迹方程和交叉口空间的映射关系. 建立了基于混合整数线性规划(Mixed integer linear programming, MILP)的自动驾驶交叉口管控模型, 以交叉口总延误最小为控制目标, 同时优化车辆在交叉口的最佳行驶路径和驶入时刻, 使用AMPL (A mathematical programming language)对模型进行编译并使用CPLEX求解器求解. 与经典感应控制和先到先服务模型进行对比, 结果表明, 本文所提出模型能对车辆进入交叉口的时刻和行驶路径进行双重优化, 显著降低自动驾驶车辆通过交叉口的车均延误, 提高交叉口空间的利用效率.Abstract: By utilizing the two-way information communication between vehicle and vehicle/infrastructure, autonomous vehicles can traverse the intersection without traditional traffic signals. Therefore, how to design an efficient and automated intersection control model for autonomous vehicles becomes a hot topic in recent years. Most previous studies often assumed that the travel routes/trajectories of autonomous vehicles inside the intersection area are exogenous inputs, and the vehicles' conflicts inside the intersection area have been simplified into a small set of points. In this paper, we firstly discretize the intersection space, and then consider the actual size of the vehicle and the unconventional intersection conflicting points by utilizing the elliptic curve to describe turning vehicles' travel trajectory, and establish the mapping relationship between the trajectory equation and the intersection space by the method of outer boundary projection and dimensionality reduction. Finally, a mixed integer linear programming (MILP) model has been developed to optimally plan and control autonomous vehicle trajectories. By minimizing the total delay of the intersection, the proposed model provides the travel route/trajectory and the time to enter the intersection for each autonomous vehicle, simultaneously. The model is compiled using AMPL (A mathematical programming language) and can be efficiently solved by CPLEX. We then compare the proposed model with traditional actuated signal control and the first-come-first-served model. Our test results clearly indicate that the proposed model can optimize the travel route and entry time for autonomous vehicles efficiently, which decreases the average delay for autonomous vehicles significantly and improves the utilization of the intersection spaces.
-
Key words:
- Autonomous vehicles /
- traffic control /
- travel trajectory /
- intersection
-
表 1 参数说明表
Table 1 Parameter definition
参数 说明 E, W, S, N 交叉口东、西、南、北四个方向 O 交叉口进口道, O∈{E, W, S, N} D 交叉口出口道, D∈{E, W, S, N} iO 进口道的第 iO 条车道, 其中 iO∈{ ${\rm{1,2,} } ··· ,{n_O}$ }jD 出口道的第 jD 条车道, 其中 jD∈{ ${\rm{1,2,} } ··· ,{m_D}$ }Oi→Dj 车辆从 O 进口道的第 i 条车道驶向 D 出口道的第 j 条车道, 不考虑掉头行驶, 因此, 在 Oi→Dj 中, O ≠ D nO O 方向进口道的总车道数 mD D 方向出口道的总车道数 dr 车道宽度 (m) dc 车辆的车身长度 (m) dR 网格边长 (m) p, q 左转或右转车辆, 通行轨迹方程与 x 轴和 y 轴的截距 (m) (α, β) 椭圆的中心, 其中(α1, β1)、(α2, β2)、(α3, β3)、(α4, β4)依次表示椭圆中心在 1, 2, 3, 4 象限 Rab 网格 R 在 x 轴和 y 轴对应的编号分别是 a, b g 进口道一条车道的第 g 辆车, 其中 $g \in \left\{ {1,2,3, ··· ,{G_{Oi} } } \right\}$ GOi O 进口道第 i 条进口道上的车辆总数 ${t_ {Oi}^g}$ O 方向的第 i 条进口道上车辆 g 理论到达交叉口的时刻 (s) $ t{_{Oi}^g{'}}$ O 方向的第 i 条进口道上车辆 g 实际到达交叉口的时刻 (s) ${T_ {Oi}^g}$ 在进口道 O 的第 i 条车道车辆g 驶入交叉口的时刻 (s) ${t_ {Oi→Dj}^{ab} }$ 轨迹 Oi→Dj 上车辆驶入方格 Rab 的时刻 (s) ${T_ {Oi→Dj}^{ab} }$ 轨迹 Oi→Dj 上车辆驶出方格 Rab 的时刻 (s) ${t_ {ab}^{g} }$ 车辆 g 驶入网格 Rab 的时刻 (s) ${T_ {ab}^{g} }$ 车辆 g 驶出网格 Rab 的时刻 (s) ${w_ {ab}^{g} }$ 二元变量, ωabg = 1 表示车辆 g 压过网格 Rab; ωabg = 0 表示车辆 g 没有压过网格 Rab ${\sigma_ {Oi→Dj}^{g} }$ 二元变量, σOi→Djg = 1 表示车辆 g 选择路径 Oi→Dj, 即从 O 方向的第 i 条进口道行驶到 D 方向的第 j 条出口道 ${\tau_ {Oi→Dj}^{ab} }$ 二元变量, τOi→Djab = 1 表示网格 Rab 在轨迹 Oi→Dj 上; τOi→Djab = 0 表示网格 Rab 不在轨迹 Oi→Dj 上 μg1g2 二元变量, 表示车辆进入网格的先后次序 ${D_ {Oi}^{g} }$ 进口道 O 车道 i 第 g 辆车的延误 (s) Delay 总延误 (s)  下载: 导出CSV
下载: 导出CSV
表 2 到达车辆的基本信息表
Table 2 Attributes of the arrival vehicles
车辆编号 O 转向 D $t^{g}_{Oi}$ (s)1 S 直行 N 2.29 2 S 左转 W 4.35 3 S 右转 E 2.88 4 S 直行 N 5.03 5 E 左转 S 4.95 6 E 直行 W 6.04 7 E 直行 W 3.46 8 E 右转 N 4.74 9 N 左转 E 3.17 10 N 直行 S 5.54 11 N 直行 S 3.07 12 N 右转 W 4.16 13 W 左转 N 2.28 14 W 直行 E 3.75 15 W 右转 S 3.17 16 W 右转 S 4.55
下载: 导出CSV
表 3 本文模型计算结果表(s)
Table 3 The results of the proposed model (s)
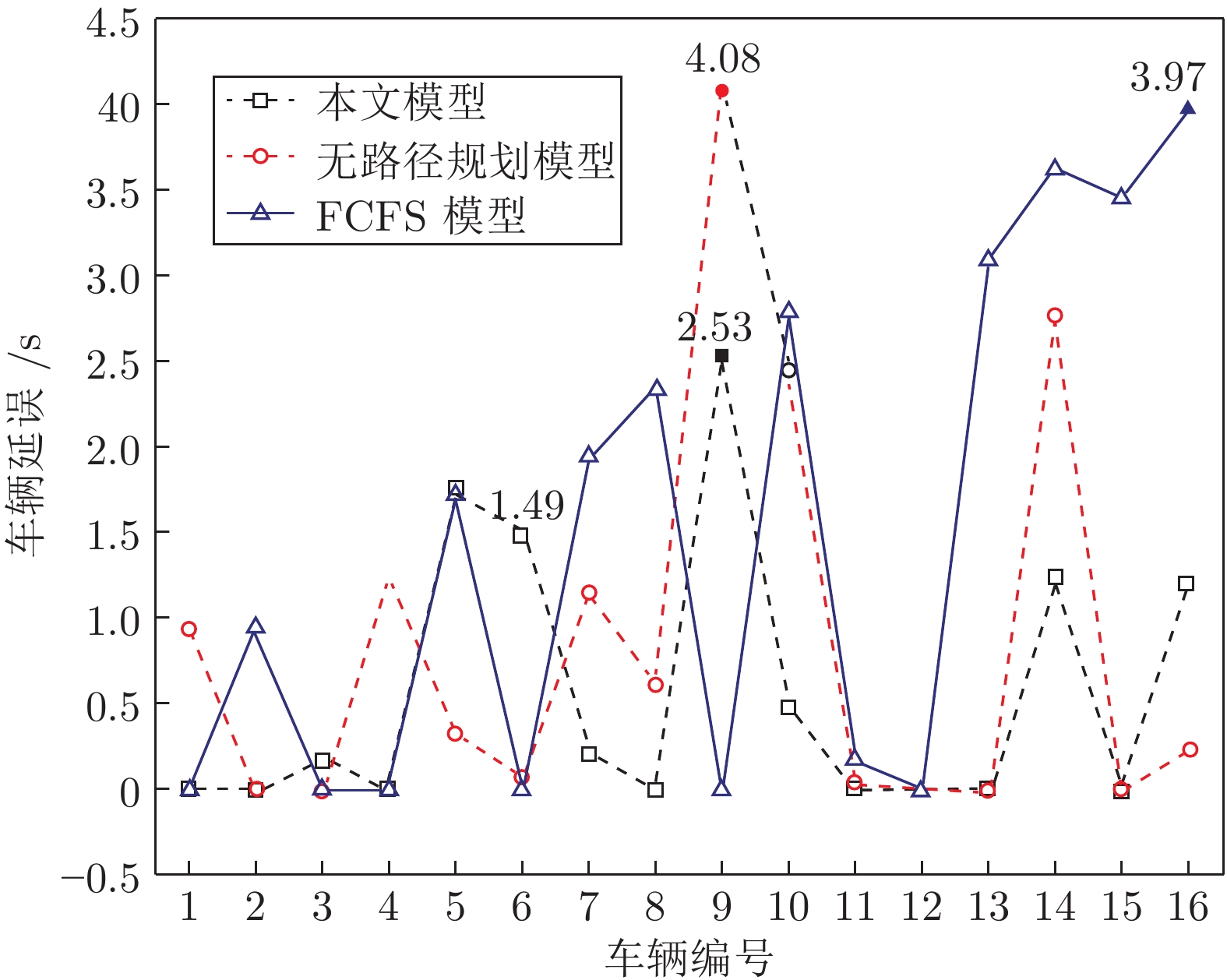
车辆编号 最佳路径 $t_{Oi}^{g'}$ $T^{g}_{Oi}$ 延误 1 S2→N2 2.28 2.28 0.00 2 S1→W1 4.37 4.37 0.00 3 S2→E2 2.86 3.03 0.17 4 S2→N2 5.05 5.05 0.00 5 E2→S2 4.94 6.70 1.76 6 E2→W2 7.55 7.55 1.49 7 E1→W1 3.42 3.63 0.21 8 E2→N2 4.71 4.71 0.00 9 N2→E2 3.10 5.63 2.53 10 N1→S2 6.08 6.08 0.49 11 N2→S2 3.08 3.08 0.00 12 N2→W2 4.17 4.17 0.00 13 W1→N1 2.26 2.26 0.00 14 W2→E2 4.99 4.99 1.24 15 S2→N2 3.14 3.14 0.00 16 S1→W1 5.74 5.74 1.21
下载: 导出CSV
表 4 本文模型车辆驶入网格的时刻表(s)
Table 4 Time of vehicles entering the grids optimized by the proposed model (s)
车辆 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 网格1 − − − − 8.2 − − − − 6.98 3.98 − − 4.99 3.14 5.74 网格2 − 4.37 − − 8.18 − − − − − − − − 5.29 3.14 − 网格3 − 4.37 3.03 − − − − − 6.6 − − − − 5.59 − − 网格4 2.28 − 3.03 5.05 − − − − 6.84 − − − − 5.89 − − 网格5 − 5.31 − − 7.88 − − − − 6.68 3.68 − 2.26 − − − 网格6 − 4.79 − − 7.71 − − − 6.25 − − − 2.56 − − − 网格7 − 4.67 − − − − − − 6.33 − − − 2.91 − − − 网格8 2.58 − − 5.35 − − − − 6.74 − − − − − − − 网格9 − 5.36 − − 7.72 − 4.53 − − 6.38 3.38 − 2.26 − − − 网格10 − 5.07 − − 7.4 − 4.23 − 5.93 − − − 2.68 − − − 网格11 − 5.02 − − 7.09 − 3.93 − 5.99 − − − 2.96 − − − 网格12 2.88 − − 5.65 6.7 − 3.63 − − − − − − − − − 网格13 − − − − − 8.45 − − − 6.08 3.08 4.17 − − − − 网格14 − − − − 7.33 8.15 − − 5.63 − − − 3.2 − − − 网格15 − − − − 7 7.85 − − 5.63 − − − 3.25 − − − 网格16 3.18 − − 5.95 6.7 7.55 − 4.71 − − − − − − − −
下载: 导出CSV
表 5 本文模型车辆驶出网格的时刻表(s)
Table 5 Time of vehicles leaving the grids optimized by the proposed model (s)
车辆 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 网格1 − − − − 9.03 − − − − 7.73 4.73 − − 5.74 3.89 6.61 网格2 − 5.29 − − 9.03 − − − − − − − − 6.04 4.31 − 网格3 − 5.24 3.90 − − − − − 7.43 − − − − 6.34 − − 网格4 3.03 − 4.20 5.80 − − − − 7.73 − − − − 6.64 − − 网格5 − 6.23 − − 8.73 − − − − 7.43 4.43 − 3.13 − − − 网格6 − 5.81 − − 8.65 − − − 7.04 − − − 3.41 − − − 网格7 − 5.52 − − − − − − 7.29 − − − 3.47 − − − 网格8 3.33 − − 6.10 − − − − 7.73 − − − − − − − 网格9 − 6.23 − − 8.41 − 5.28 − − 7.13 4.13 − 3.18 − − − 网格10 − 5.93 − − 8.33 − 4.98 − 6.78 − − − 3.70 − − − 网格11 − 5.58 − − 8.02 − 4.68 − 6.87 − − − 3.82 − − − 网格12 3.63 − − 6.40 7.56 − 4.38 − − − − − − − − − 网格13 − − − − − 9.20 − − − 6.83 3.83 5.04 − − − − 网格14 − − − − 8.02 8.90 − − 6.44 − − − 4.12 − − − 网格15 − − − − 7.85 8.60 − − 6.45 − − − 4.12 − − − 网格16 3.93 − − 6.70 7.54 8.30 − 5.58 − − − − − − − −
下载: 导出CSV
表 6 三种对比模型的计算结果汇总表(s)
Table 6 Results of three models for comparing (s)
车辆编号 无路径规划模型 感应控制模型 FCFS 模型 $t_{Oi}^{g'}$ $T^{g}_{Oi}$ 延误 $t_{Oi}^{g'}$ $T^{g}_{Oi}$ 延误 $t_{Oi}^{g'}$ $T^{g}_{Oi}$ 延误 1 2.28 2.28 3.22 2.29 2.29 0.00 2.28 2.28 0.00 2 4.37 4.37 4.37 4.35 45.00 40.65 2.29 3.24 0.95 3 2.86 2.86 2.86 2.88 2.88 0.00 2.88 2.88 0.00 4 5.05 6.29 6.29 5.03 5.03 0.00 3.07 3.07 0.00 5 4.94 4.94 5.27 4.95 15.00 10.05 3.17 4.89 1.72 6 6.06 6.14 6.14 15.45 30.00 23.96 3.17 3.17 0.00 7 3.42 3.42 4.57 3.46 30.00 26.54 3.46 5.41 1.95 8 4.71 5.32 5.32 30.45 30.45 25.71 3.75 6.09 2.34 9 3.10 3.10 7.18 3.17 45.00 41.83 4.16 4.16 0.00 10 5.59 8.04 8.04 45.45 60.00 54.46 4.35 7.14 2.79 11 3.08 3.08 3.11 3.07 3.07 0.00 4.55 4.72 0.18 12 4.17 4.17 4.17 4.16 4.16 0.00 5.41 4.74 0.00 13 2.26 2.26 2.26 2.28 15.00 12.72 4.95 8.04 3.09 14 3.75 6.53 6.53 15.45 30.00 26.25 5.03 8.66 3.63 15 3.14 3.14 3.14 3.17 3.17 0.00 5.54 9.00 3.45 16 4.53 4.76 4.76 4.55 4.55 0.00 8.04 10.01 3.97
下载: 导出CSV
表 7 本文模型和质点模型计算结果对比表
Table 7 Comparison of results of the proposed model and the model treats vehicle as point
车辆编号 本文模型 质点模型 最佳路径相同 延误 最佳路径 延误 最佳路径 1 0.00 S2→N2 0.00 S2→N2 是 2 0.00 S1→W1 1.71 S1→W1 是 3 0.17 S2→E2 0.00 S2→E2 是 4 0.00 S2→N2 0.86 S2→N2 是 5 1.76 E2→S2 0.00 E1→S1 否 6 1.49 E2→W2 0.00 E2→W2 是 7 0.21 E1→W1 0.61 E2-W2 否 8 0.00 E2→N2 0.07 E2→N2 是 9 2.53 N2→E2 0.30 N1→E1 否 10 0.49 N1→S2 0.00 N1→S2 是 11 0.00 N2→S2 0.00 N2→S1 否 12 0.00 N2→W2 0.01 N2-W1 否 13 0.00 W1→N1 0.00 W1→N1 是 14 1.24 W2→E2 0.40 W1→E2 否 15 0.00 W2→S1 0.00 W2→S2 否 16 1.21 W2→S2 0.00 W2→S2 否
下载: 导出CSV
表 8 基于滚动时间窗的优化结果
Table 8 Optimization results based on rolling horizon window
时段 $0\sim 5 $ s$5\sim 10 $ s$10\sim 15 $ s$15\sim 20 $ s$20\sim 25 $ s$25\sim 30 $ s$30\sim 35 $ s$35\sim 40 $ s$40\sim 45 $ s$45\sim 50 $ s延误 (s) 2.71 14.00 23.85 15.92 4.59 6.08 3.63 2.96 15.54 16.67 车均延误 0.23 0.88 1.40 1.14 0.38 0.47 0.28 0.27 0.86 1.39 时段 $50\sim 55 $ s$55\sim 60 $ s$60\sim 65 $ s$65\sim 70 $ s$70\sim 75 $ s$75\sim 80 $ s$80\sim 85 $ s$85\sim 90 $ s$90\sim 95 $ s$95\sim 100 $ s延误 (s) 26.58 25.09 14.13 5.26 3.08 16.87 22.44 4.61 6.81 17.09 车均延误 1.90 1.32 0.88 0.53 0.22 1.21 1.18 0.46 0.52 0.95
下载: 导出CSV
表 9 计算时间表(s)
Table 9 Results of computational time (s)
到达车辆数 本文模型计算时间 基于滚动时间窗平均计算时间 9辆车 0.05 0.03 10辆车 0.14 0.02 11辆车 0.22 0.04 12辆车 0.67 0.06 13辆车 1.47 0.09 14辆车 1.40 0.09 15辆车 1.68 0.09 16辆车 2.25 0.05 17辆车 3.06 0.05 18辆车 5.57 0.08 19辆车 11.97 0.16 20辆车 18.05 0.17
下载: 导出CSV
表 A1 扩展参数说明表
Table A1 Extended parameter definition
参数 说明 v 表示车辆以速度 v 匀速通过交叉口 (m/s) FEi→Wj, fEi→Wj 车辆轨迹的外边界和内边界方程 $Q^{1}_{Oi→Dj}, Q^{2}_{Oi→Dj}$ 直行轨迹 Oi→Dj 的外边界进入和驶出交叉口的点用 $Q^{1}_{Oi→Dj}$ 和$ Q^{2}_{Oi→Dj}$ 表示, 对应的横纵坐标分别为
$( {X_{Oi \to Dj}^1,{\rm{} }Y_{Oi \to Dj}^1} )$ 、$( {X_{Oi \to Dj}^2,{\rm{} }Y_{Oi \to Dj}^2} )$ gab, hab, qab, uab 按顺时针方向, 网格 Rab 的四个顶点, 对应的横纵坐标依次是 $ \left( {{x_g},{y_g}} \right)$ ,$ \left( {{x_h},{y_h}} \right)$ ,$ \left( {{x_q},{y_q}} \right)$ ,$ \left( {{x_u},{y_u}} \right)$ Gab, Hab, Qab, Uab 表示网格 Rab 的四个顶点在轨迹范围内, 对应的横纵坐标依次是 $ \left( {{x_G},{y_G}} \right),\;\left( {{x_H},{y_H}} \right),\;\left( {{x_Q},{y_Q}} \right),\;\left( {{x_U},{y_U}} \right)$ ${G'_{ab} },{H'_{ab} },{Q'_{ab} },{U'_{ab} }$ 表示点 Gab, Hab, Qab, Uab 在外边界线上的投影点, 对应的横纵坐标依次是 $( { {x'_G},{y'_G} } ),\;( { {x'_H},{y'_H} } ),\;( { {x'_Q},{y'_Q} } ),\;( { {x'_U},{y'_U} } )$ $C^{ab}_{Oi→Dj}$ 内边界方程和网格坐标范围的交点, 横纵坐标为 $ \left( {{x_c},{y_c}} \right)$ $C_{Oi \to Dj}^{ab'}$ 交点 $C^{ab}_{Oi→Dj}$ 在外边界的投影点, 横纵坐标为$\left( { {x'_c},{y'_c}} \right)$ $D^{ab}_{Oi→Dj}$ 外边界方程和网格坐标范围的交点, 横纵坐标为 $ \left( {{x_d},{y_d}} \right)$ $l_{Oi \to Dj}^{\left( z \right)}$ 相邻两外边界交点之间的距离(m) z 外边界方程和网格坐标范围的的交点的序号, 其中 $z \in \left\{ {1,2, ··· ,Z} \right\}$ Z 轨迹外边界与网格交点的个数 $A^{ab}_{Oi→Dj}$ 车辆驶入网格 Rab 的位置点, 横纵坐标为 $\left( {x_{Oi \to Dj}^{ab},y_{Oi \to Dj}^{ab} } \right)$ $A_{Oi \to Dj}^{ab'}$ 点 $A{ {_{Oi \to Dj}^{ab} } }$ 在轨迹外边界的投影点, 横纵坐标为$\left( {x_{Oi \to Dj}^{ab'},y_{Oi \to Dj}^{ab'} } \right)$ $l^{ab}_{Oi→Dj}$ 驶入网格位置点的投影点 $ A{{_{Oi \to Dj}^{ab'}}}$ 与紧邻其后的外边界交点$D{ {_{Oi \to Dj}^{ab} } }$ 的距离 (m)$B^{ab}_{Oi→Dj}$ 驶出网格的位置点, 横纵坐标为 $\left( {X_{Oi \to Dj}^{ab},Y_{Oi \to Dj}^{ab} } \right)$ $B_{Oi \to Dj}^{ab'}$ 点 $B{ {_{Oi \to Dj}^{ab} } }$ 在轨迹外边界的投影点, 横纵坐标为$\left( {X_{Oi \to Dj}^{ab},Y_{Oi \to Dj}^{ab'} } \right)$ $L^{ab}_{Oi→Dj}$ 驶出网格位置点的投影点 $B{ {_{Oi \to Dj}^{ab'} } }$ 与紧邻其后的外边界交点$D{ {_{Oi \to Dj}^{ab} } }$ 的距离 (m)k 外边界直线轨迹方程 FOi→Dj 的斜率或外边界曲线上某点切线的斜率 K 点与投影点确定的直线的斜率 C 常数 N* 正整数集合 M 大的正数 vt 车辆进入交叉口时的速度 (m/s) a 车辆加减速时的加速度 (m·s-2) tD(z) 车辆在点 $D{ {_{Oi \to Dj}^{ab\left( z-1 \right)} } }$ 和点$D{ {_{Oi \to Dj}^{ab\left( z \right)} } }$ 之间, 加速 (或减速) 行驶$ l_{Oi \to Dj}^{\left( z \right)}$ 的距离所用的时间(s)tA(z) 车辆在点 $A{ {_{Oi \to Dj}^{ab'} } }$ 和点$D{ {_{Oi \to Dj}^{abA\left( z \right)} } }$ 之间, 加速 (或减速) 行驶$l^{ab}_{Oi→Dj}$ 的距离所用的时间(s)TB(z) 车辆在点 $B{ {_{Oi \to Dj}^{ab'} } }$ 和点$D{ {_{Oi \to Dj}^{abB\left( z \right)} } }$ 之间, 加速 (或减速) 行驶$L^{ab}_{Oi→Dj}+d_e$ 距离所用的时间(s)
下载: 导出CSV
-
[1] 李润梅, 张立威, 王剑. 基于时变间距和相对角度的无人车跟随控制方法研究. 自动化学报, 2018, 44(11): 2031−2040Li Run-Mei, Zhang Li-Wei, Wang Jian. A control method of unmanned car following under time-varying relative distance and angle. Acta Automatica Sinica, 2018, 44(11): 2031−2040 [2] Liu W. An equilibrium analysis of commuter parking in the era of autonomous vehicles. Transportation Research Part C: Emerging Technologies, 2018, 92: 191−207 doi: 10.1016/j.trc.2018.04.024 [3] Li L, Li X P. Parsimonious trajectory design of connected automated traffic. Transportation Research Part B: Methodological, 2019, 119: 1−21 doi: 10.1016/j.trb.2018.11.006 [4] Miculescu D, Karaman S. Polling systems based sutonomous vehicle coordination in traffic intersections with no traffic signals. Systems and Control, arXiv: 1607.07896, 2016. [5] 李力, 王飞跃. 地面交通控制的百年回顾和未来展望. 自动化学报, 2018, 44(4): 577−583Li Li, Wang Fei-Yue. Ground traffic control in the past century and its future perspective. Acta Automatica Sinica, 2018, 44(4): 577−583 [6] Qian X J, Altché F, Grégoire J, Arnaud D L F. Autonomous intersection management systems: Criteria, implementation and evaluation. IET Intelligent Transport Systems, 2017, 11(3): 182−189 doi: 10.1049/iet-its.2016.0043 [7] Chen L, Englund C. Cooperative intersection management: A survey. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 570−586 doi: 10.1109/TITS.2015.2471812 [8] Krishnan S, Aadithya R G, Ramakrishnan R, Arvindh V, Sivanathan K. A look at motion planning for autonomous vehicles at an intersection. Robotics, arXiv: 1806.07834, 2018. [9] Dresner K, Stone P. Multiagent traffic management: A reservation-based intersection control mechanism. In: Proceedings of the 3rd International Joint Conference on Autonomous Agents and Multiagent Systems. New York, NY, USA: AAMAS, 2004. 2: 530−537 [10] Dresner K M, Stone P. A multiagent approach to autonomous intersection management. Articial Intelligence Research, 2008, 31(3): 591−656 [11] Fajardo D, Au T C, Waller S T, Stone P, Yang D. Automated intersection control: Performance of future innovation versus current traffic signal control. Transportation Research Record, 2011, 2259: 223−232 doi: 10.3141/2259-21 [12] Gregoire J, Bonnabel S, Arnaud D L F. Optimal cooperative motion planning for vehicles at intersections. Systems and Control, arXiv: 1310.7729, 2012. [13] Dresner K M, Stone P. Sharing the road: Autonomous vehicles meet human drivers. In: Proceedings of the 20th International Joint Conference on Artificial Intelligence. Hyderabad, India, 2007. 1263−1268 [14] Levin M W, Boyles S D, Patel R. Paradoxes of reservation-based intersection controls in traffic networks. Transportation Research Part A: Policy Practice, 2016, 90: 14−25 doi: 10.1016/j.tra.2016.05.013 [15] Li L, Wang F-Y. Cooperative driving at blind crossings using intervehicle communication. IEEE Transactions on Vehicular Technology, 2006, 55(6): 1712−1724 doi: 10.1109/TVT.2006.878730 [16] Ahmane M, Abbas-Turki A, Perronnet F, Wu J, El Moudni A, Buisson J, Zeo R. Modeling and controlling an isolated urban intersection based on cooperative vehicles. Transportation Research Part C: Emerging Technologies, 2013, 28(3): 44−62 [17] Carlino D, Boyles S D, Stone P. Auction-based autonomous intersection management. In: Proceedings of the 16th IEEE International Conference on Intelligent Transportation Systems. Hague, Netherlands IEEE, 2013. 529−534 [18] Elhenawy M, Elbery A A, Hassan A A, Rakha H A. An intersection game-theory-based traffic control algorithm in a connected vehicle environment. In: Proceedings of the 18th IEEE International Conference on Intelligent Transportation Systems. Las Patmas, Spain: IEEE, 2015. 343−347 [19] Wei H R, Mashayekhy L, Papineau J. Intersection management for connected autonomous vehicles: A game theoretic framework. In: Proceedings of the 2018 IEEE International Conference on Intelligent Transportation Systems. 2018. 583−588 [20] Wu J, Abbas-Turki A, Moudni A E. Cooperative driving: An ant colony system for autonomous intersection management. Applied Intelligence, 2012, 37(2): 207−222 doi: 10.1007/s10489-011-0322-z [21] Li Z F, Pourmehrab M, Elefteriadou L, Ranka S. Intersection control optimization for automated vehicles using genetic algorithm. Transportation Engineering, Part A: Systems, 2018, 144(12): 1−15 [22] Bashiri M, Fleming C H. A Platoon-based intersection management system for autonomous vehicles. Intelligent Vehicles Symposium, 2017, 4: 667−672 [23] Medina A, Wouw N, Nijmeijer H. Cooperative intersection control based on virtual platooning. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(6): 1727−1740 doi: 10.1109/TITS.2017.2735628 [24] Lee J, Park B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 81−90 doi: 10.1109/TITS.2011.2178836 [25] Zhu F, Ukkusuri S V. A linear programming formulation for autonomous intersection control within a dynamic traffic assignment and connected vehicle environment. Transportation Research Part C, 2015, 55: 363−378 doi: 10.1016/j.trc.2015.01.006 [26] Müller E R, Carlson R C, Junior W K. Intersection control for automated vehicles with MILP. IFAC PapersOnLine, 2016, 49(3): 37−42 doi: 10.1016/j.ifacol.2016.07.007 [27] Levin M W, Rey D. Conflict-point formulation of intersection control for autonomous vehicles. Transportation Research Part C: Emerging Technologies, 2017, 85: 528−547 doi: 10.1016/j.trc.2017.09.025 [28] Fayazi S A, Vahidi A. Mixed integer linear programming for optimal scheduling of autonomous vehicle intersection crossing. IEEE Transactions on Intelligent Vehicles, 2018, 3(3): 287−299 doi: 10.1109/TIV.2018.2843163 [29] Belkhouche F. Collaboration and optimal conflict resolution at an unsignalized intersection. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(6): 2301−2312 [30] He Z B, Zheng L, Lu L L, Guan W. Erasing lane changes from roads: A design of future intersections. IEEE Transactions on Intelligent Vehicles, 2018, 3(2): 173−184 doi: 10.1109/TIV.2018.2804164 [31] Fourer R, Gay D M, Kernighan B W. A modeling language for mathematical programming. Management Science, 1990, 36(5): 519−554 doi: 10.1287/mnsc.36.5.519 [32] Xu G M, Yang H, Liu W, Shi F. Itinerary choice and advance ticket booking for high-speed-railway network services. Transportation Research Part C: Emerging Technologies, 2018, 95: 82−104 doi: 10.1016/j.trc.2018.07.010 [33] Liu W, Yang H, Yin Y F. Efficiency of a highway use reservation system for morning commute. Transportation Research Part C: Emerging Technologies, 2015, 56: 293−308 doi: 10.1016/j.trc.2015.04.015 -

 下载:
下载:





















































































计量
- 文章访问数: 3391
- HTML全文浏览量: 513
- PDF下载量: 647
- 被引次数: 0
