

An Operation State Analysis Method for Integrated Energy System Based on Correlation Information Adversarial Learning
-
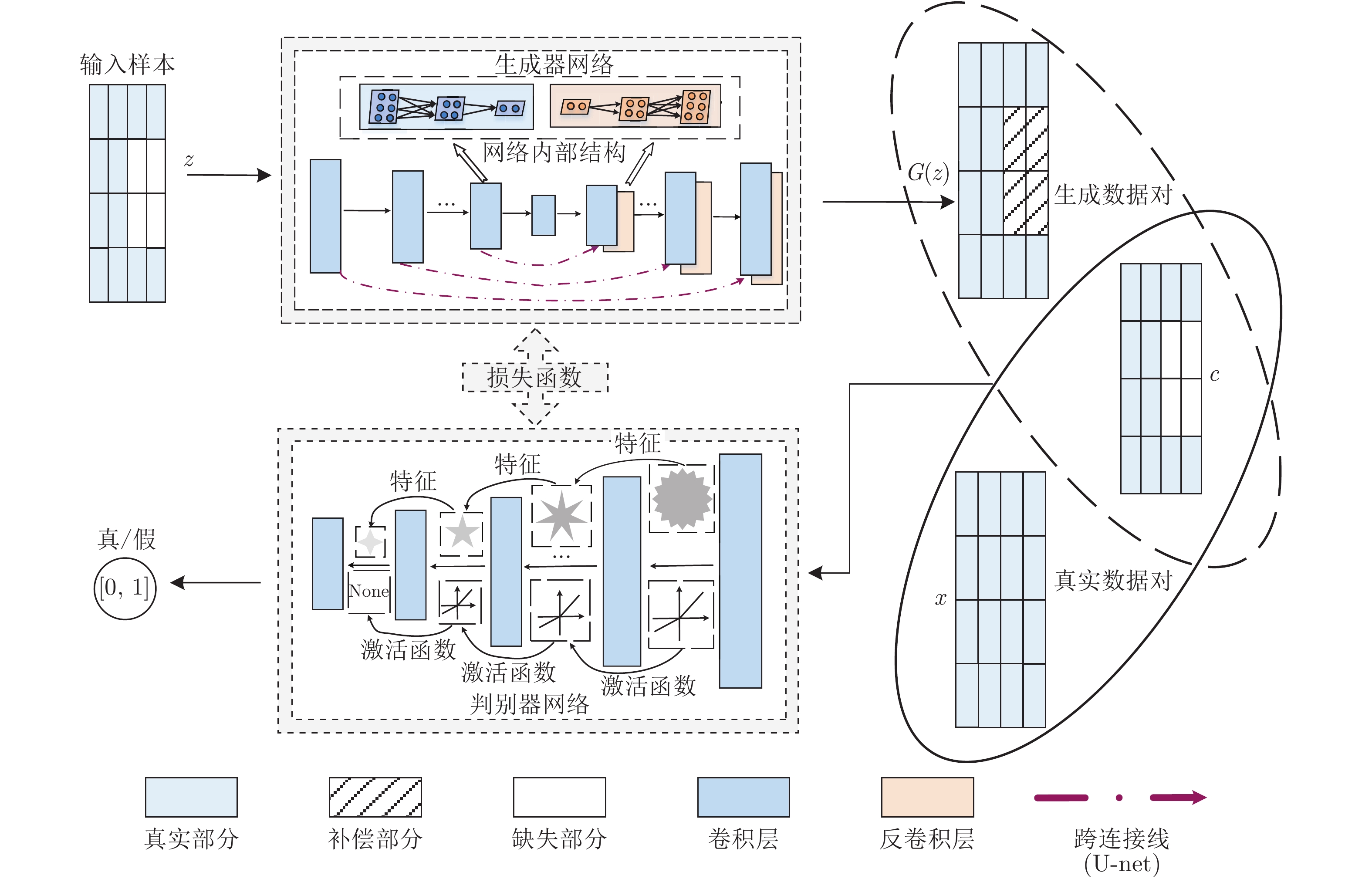
摘要: 综合能源系统(Integrated energy system, IES)运行状态分析常以广泛化信息技术应用提供的数据为支撑, 然而传感器故障、网络通信中断等信息异常导致的数据缺失会直接影响数据质量. 在考虑数据缺失的情况下, 本文提出了一种基于关联信息对抗学习的综合能源系统运行状态分析方法. 首先构建深度生成对抗网络(Generative adversarial network, GAN)对数据缺失部分进行可靠性补偿. 在设计生成器结构过程中, 通过引入系统拓扑邻接矩阵对生成器输入数据进行优化排序, 进而在训练过程中采用设计的多属性融合生成器损失函数, 促使生成器进一步得到高精度补偿数据. 接着将判别器提取的不同时刻完整能源数据的特征作为基础, 采用浅层特征分布及深层特征信息差异值融合判断, 从而实现系统运行状态分析. 最后对不同数据缺失补偿及不同类型节点改变情况进行仿真, 验证了本文所提方法的可行性与有效性.Abstract: The operation state analysis of integrated energy system (IES) is based on data provided through information technology application. However, data missing caused by ubiquitous device failure, network interruption and so on, has direct influence on quality of data. Considering data missing, this paper proposes an operation state analysis method for integrated energy system based on correlation information adversarial learning. Firstly, deep generative adversarial network (GAN) is presented to complete the reliable data imputation process. In the designed generator structure, an adjacent matrix is presented to optimize the input data sorting, and then the multi-attribute fusion loss function in training process is utilized to drive generator for obtaining high precision completed data. Based on different time completed energy data features extracted by discriminator, difference values of shallow and deep features are considered as the judging index to realize operation state analysis. Finally, the feasibility and effectiveness of the proposed method are verified through the different data imputation situation and the changes of different types of nodes.
-
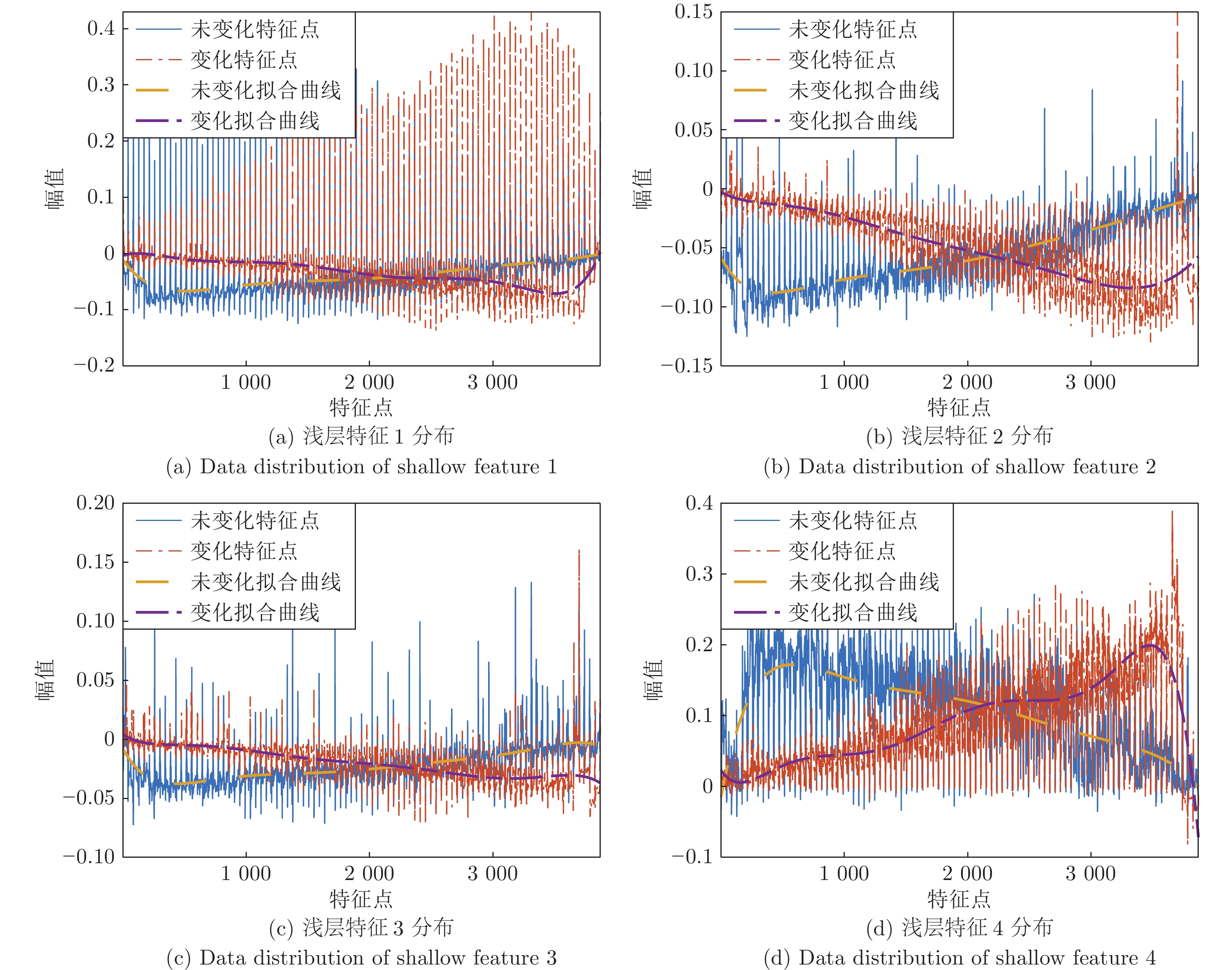
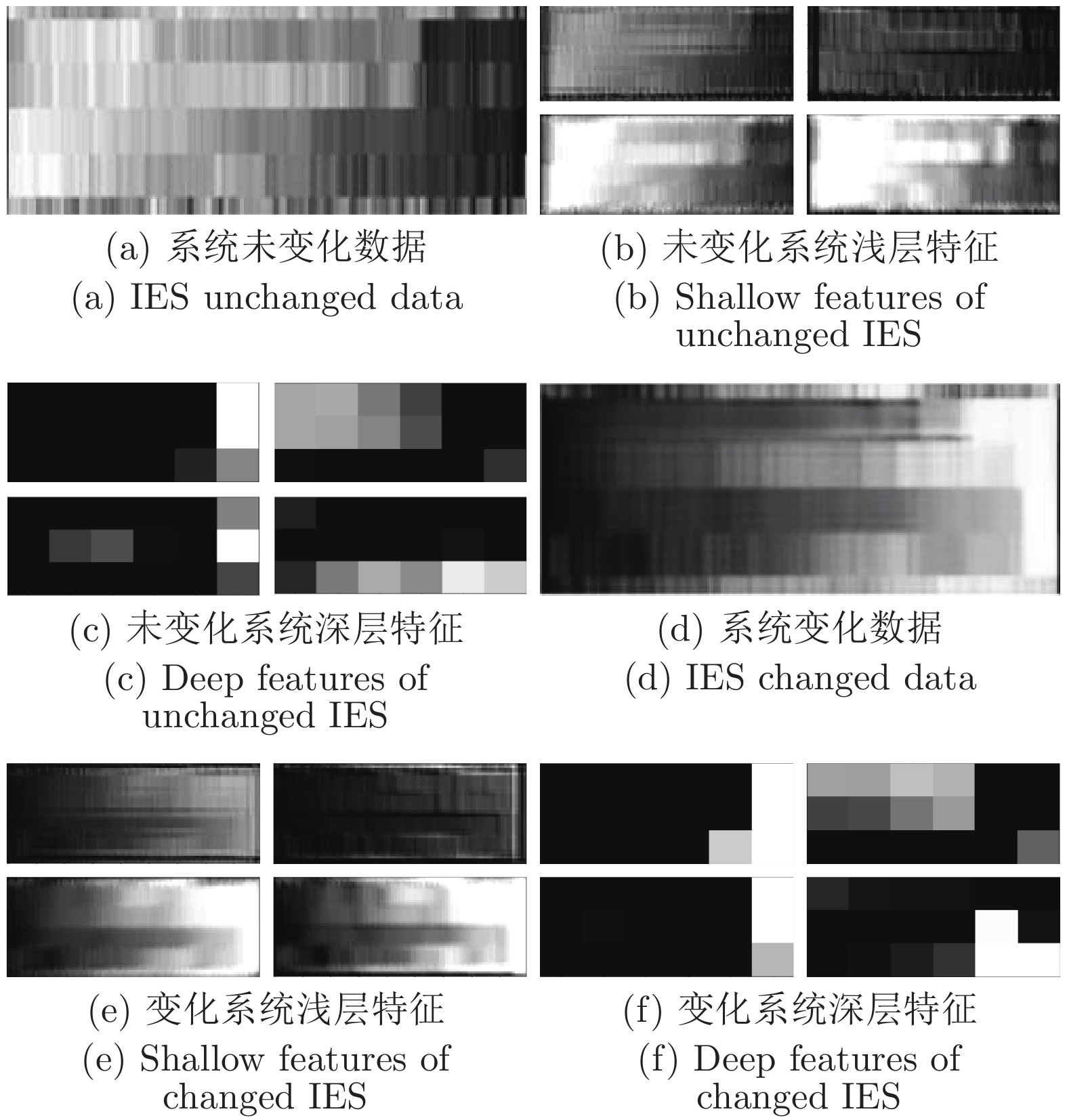
图 8 电节点21变化前后系统浅层特征分布曲线
Fig. 8 Data distribution change of shallow features for electricity node 21
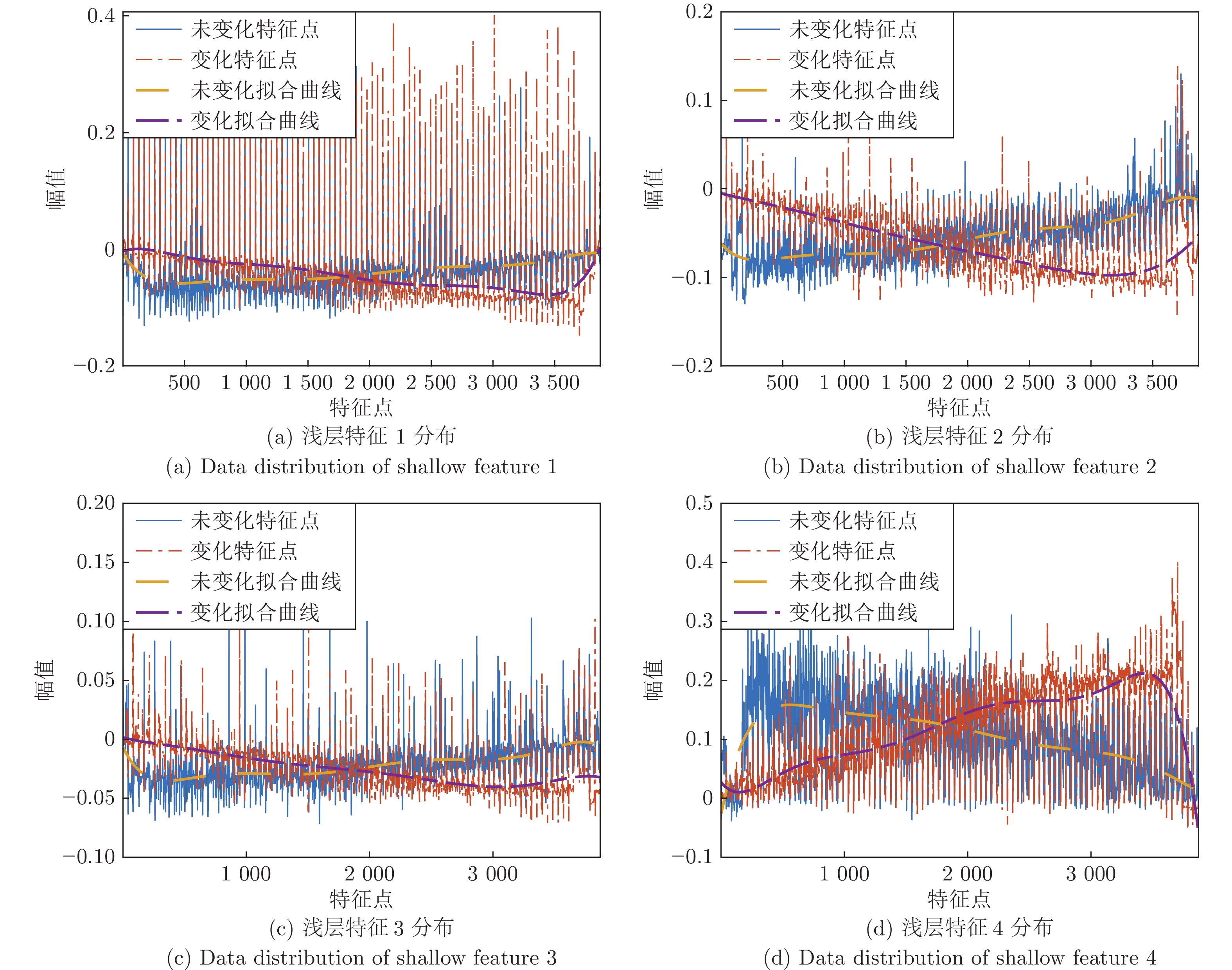
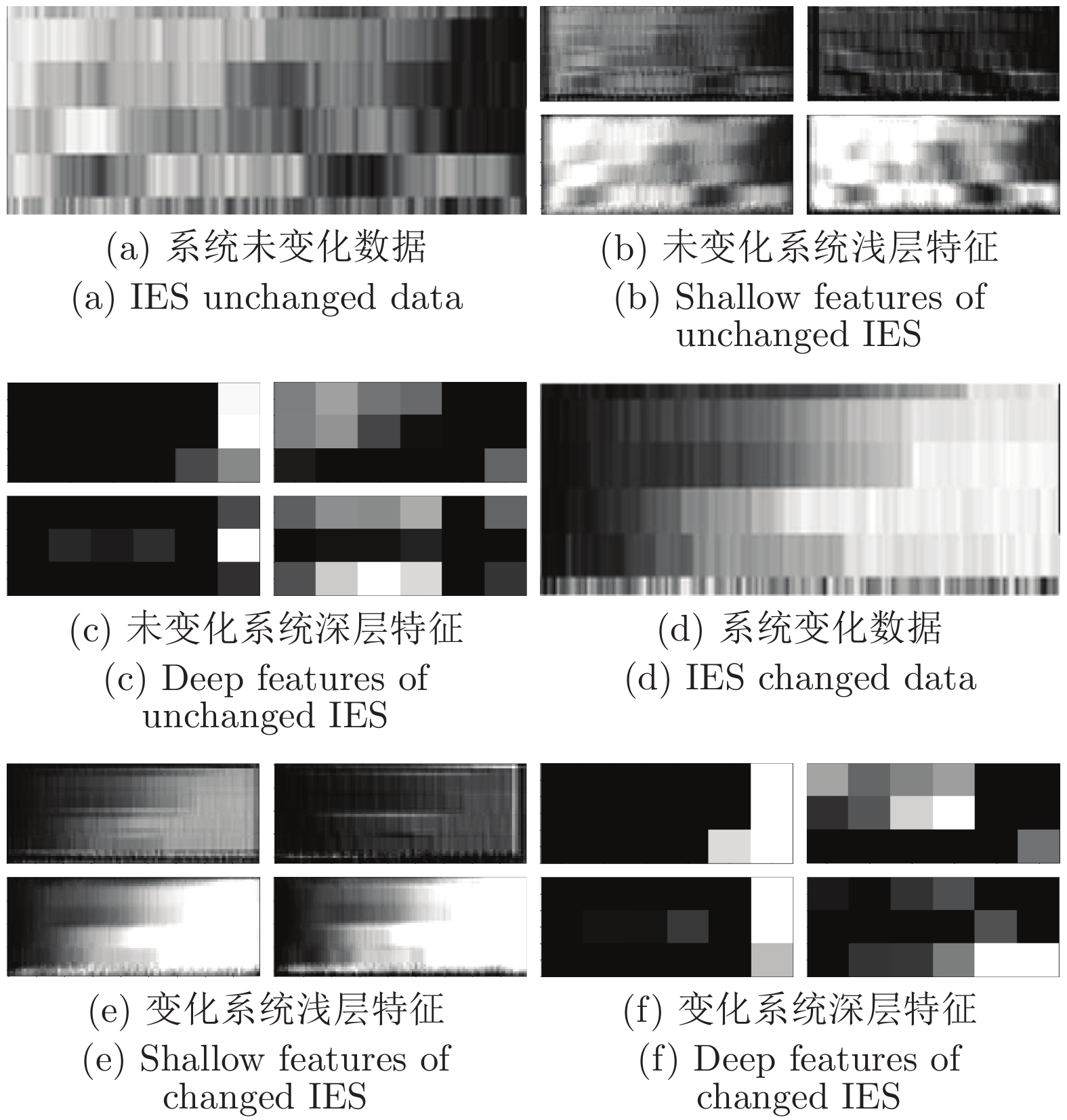
图 10 热节点18变化前后系统浅层特征分布曲线
Fig. 10 Data distribution change of shallow features for heat node 18
表 1 多节点数据缺失补偿结果 (×10−5)
Table 1 Multi-node data imputation results (×10−5)
补偿节点 MAE MSE MPE 电节点9 1.4852 1.4948 1.4136 电节点12 1.5093 1.5188 1.4418 气节点7 1.5250 1.5362 2.1993  下载: 导出CSV
下载: 导出CSV
表 2 不同数量的缺失数据补偿结果 (×10−5)
Table 2 Imputation results of different numbers of missing data (×10−5)
缺失数量 MAE MSE MPE 1 1.5022 1.4926 1.5008 3 1.5190 1.5205 1.5063 5 1.5183 1.5194 1.5253 7 1.5852 1.5933 1.5757 9 1.6232 1.6201 1.6193
下载: 导出CSV
表 3 不同方法补偿结果对比 (×10−5)
Table 3 Comparison of different data imputation methods (×10−5)
补偿方法 MAE MSE MPE CNN 2.3248 2.3003 2.2741 DAE 2.2428 2.1892 2.1505 DCGAN 1.9255 1.8864 1.8469 DCGAN-L1 1.8421 1.7605 1.7844 Pix2Pix 1.7274 1.6148 1.6303 本文方法 1.5934 1.4835 1.4492
下载: 导出CSV
表 4 不同节点的状态判断结果(%)
Table 4 State judgment results of different nodes (%)
变化节点 (0, 1%) (1%, 2%) (2%, 3%) (3%, 4%) (4%, 5%) 电节点17 0 60 100 100 100 电节点21 0 70 100 100 100 热节点18 0 70 100 100 100 热节点30 0 70 100 100 100
下载: 导出CSV
-
[1] 孙秋野, 滕菲, 张化光. 能源互联网及其关键控制问题. 自动化学报, 2017, 42(2): 176−194Sun Qiu-Ye, Teng Fei, Zhang Hua-Guang. Energy internet and its key control issues. Acta Automatica Sinica, 2017, 42(2): 176−194 [2] Heinen S, Burke D, O'Malley M. Electricity, gas, heat integration via residential hybrid heating technologies — an investment model assessment. Energy, 2016, 109: 906−919 doi: 10.1016/j.energy.2016.04.126 [3] Sun H B, Guo Q L, Zhang B M, Wu W C, Wang B, Shen X W, Wang J H. Integrated energy management system: concept, design, and demonstration in China. IEEE Electrification Magazine, 2018, 6(2): 42−40 doi: 10.1109/MELE.2018.2816842 [4] Hibbard P J, Schatzki T. The interdependence of electricity and natural gas: Current factors and future prospects. Electricity Journal, 2012, 25(4): 6−17 doi: 10.1016/j.tej.2012.04.012 [5] Fairley P. The troubled link between gas and electricity grids. IEEE Spectrum, 2016, 53(6): 11−12 doi: 10.1109/MSPEC.2016.7473135 [6] 王平, 王尧. 台湾大停电的“锅”谁来背. 两岸关系, 2017, (9): 30−30 doi: 10.3969/j.issn.1006-5679.2017.09.008Wang Ping, Wang Yao. Taiwan power failure “pot” who will carry. Cross-Strait Relations, 2017, (9): 30−30 doi: 10.3969/j.issn.1006-5679.2017.09.008 [7] Augutis J, Krikštolaitis R, Martišauskas L, Pečiulytė S, Žutautaitė I. Integrated energy security assessment. Energy, 2017, 109: 890−901 [8] Wang D, Liu L, Jia H J, Wang W L, Zhi Y Q, Meng Z J, Zhou B Y. Review of key problems related to integrated energy distribution systems. CSEE Journal of Power and Energy Systems, 2018, 4(2): 130−145 doi: 10.17775/CSEEJPES.2018.00570 [9] 陈胜, 卫志农, 孙国强, 王丹, 臧海祥. 电−气互联综合能源系统安全分析与优化控制研究综述. 电力自动化设备, 2019, 39(8): 3−11Chen Sheng, Wei Zhi-Nong, Sun Guo-Qing, Wang Dan, Zang Hai-Yang. Review on security analysis and optimal control of electricity-gas integrated energy system. Electric Power Automation Equipment, 2019, 39(8): 3−11 [10] 董今妮, 孙宏斌, 郭庆来, 盛同天, 乔铮. 面向能源互联网的电−气耦合网络状态估计技术. 电网技术, 2018, 42(2): 400−408Dong Jin-Ni, Sun Hong-Bin, Guo Qing-Lai, Sheng Tong-Tian, Qiao Zheng. State estimation of combined electric-gas networks for energy internet. Power System Technology, 2018, 42(2): 400−408 [11] 陈艳波, 郑顺林, 杨宁, 杨晓楠, 刘铠诚. 基于加权最小绝对值的电−气综合能源系统抗差状态估计. 电力系统自动化, 2019, 43(13): 61−74 doi: 10.7500/AEPS20180428003Chen Yan-Bo, Zheng Shun-Lin, Yang Ning, Yang Xiao-Nan, Liu Kai-Cheng. Robust state estimation of electric-gas integrated energy system based on weighted least absolute value. Automation of Electric Power Systems, 2019, 43(13): 61−74 doi: 10.7500/AEPS20180428003 [12] Du Y X, Zhang W, Zhang T T. ADMM-based distributed state estimation for integrated energy system. CSEE Journal of Power and Energy Systems, 2019, 5(2): 275−283 [13] Liu Y B, Su Y C, Xiang Y, Liu J Y, Wang L F, Xu W T. Operational reliability assessment for gas-electric integrated distribution feeders. IEEE Transactions on Smart Grid, 2019, 10(1): 1091−1100 doi: 10.1109/TSG.2018.2844309 [14] Zhou K L, Fu C, Yang S L. Big data driven smart energy management: from big data to big insights. Renewable and Sustainable Energy Reviews, 2016, 56: 215−225 doi: 10.1016/j.rser.2015.11.050 [15] 孙秋野, 杨凌霄, 张化光. 智慧能源—人工智能技术在电力系统中的应用与展望. 控制与决策, 2018, 33(5): 938−949Sun Qiu-Ye, Yang Ling-Xiao, Zhang Hua-Guang. Smart energy-applications and prospects of artificial intelligence technology in power system. Control and Decision, 2018, 33(5): 938−949 [16] He X, Qiu R C, Chu L, Ai Q, Ling Z N, Zhang J. Invisible units detection and estimation based on random matrix theory. IEEE Transactions on Power Systems, 2020, 35(3): 1846−1855 doi: 10.1109/TPWRS.2019.2935739 [17] Huang T E, Guo Q L, Sun H B, Tan C W, Hu T Y. A deep spatial-temporal data-driven approach considering microclimates for power system security assessment. Applied Energy, 2019, 237: 36−48 doi: 10.1016/j.apenergy.2019.01.013 [18] Li M S, Deng W M, Xiahou K S, Ji T Y, Wu Q H. A data-driven method for fault detection and isolation of the integrated energy-based district heating system. IEEE Access, 2020, 8: 23787−23801 doi: 10.1109/ACCESS.2020.2970273 [19] Liu J H, Qu F M, Hong X W, Zhang H G. A small-sample wind turbine fault detection method with synthetic fault data using generative adversarial nets. IEEE Transactions on Industrial Informatics, 2019, 15(7): 3877−3888 doi: 10.1109/TII.2018.2885365 [20] Shi X, Qiu R, Mi T B, He X, Zhu Y L. Adversarial feature learning of online monitoring data for operational risk assessment in distribution networks. IEEE Transactions on Power Systems, 2020, 35(2): 975−985 doi: 10.1109/TPWRS.2019.2941162 [21] Ghahramani Z. Supervised learning from incomplete data via an EM approach. Advances in Neural Information Processing Systems, 1984, 6: 120−127 [22] Xie K, Wang X, Liu X L, Wen J G, Cao J N. Interference-aware cooperative communication in multi-radio multi-channel wireless networks. IEEE Transactions on Computers, 2016, 65(5): 1528−1542 doi: 10.1109/TC.2015.2448089 [23] Chen H B, Grant-Muller S, Mussone L, Montgomery F. A study of hybrid neural network approaches and the effects of missing data on traffic forecasting. Neural Computing and Applications, 2001, 10(3): 277−286 [24] Jaques N, Taylor S, Sano A, Picard R. Multimodal autoencoder: a deep learning approach to filling in missing sensor data and enabling better mood prediction. In: Proceedings of the 2017 International Conference on Affective Computing and Intelligent Interaction, San Antonio, TX, USA: IEEE, 2017. 202−208 [25] Zhuang Y F, Ke R M, Wang Y H. Innovative method for traffic data imputation based on convolutional neural network. IET Intelligent Transport Systems, 2019, 13(4): 605−613 doi: 10.1049/iet-its.2018.5114 [26] 王守相, 陈海文, 潘志新, 王建明. 采用改进生成式对抗网络的电力系统量测缺失数据重建方法. 中国电机工程学报, 2019, 39(1): 56−64Wang Shou-Xiang, Chen Hai-Wen, Pan Zhi-Xin, Wang Jian-Ming. A reconstruction method for missing data in power system measurement using an improved generative adversarial network. Proceedings of the CSEE, 2019, 39(1): 56−64 [27] Ren C, Xu Y. A fully data-driven method based on generative adversarial networks for power system dynamic security assessment with missing data. IEEE Transactions on Power Systems, 2019, 34(6): 5044−5052 doi: 10.1109/TPWRS.2019.2922671 [28] Li Y C, Wang Y Y, Hu S Y. Online generative adversary network based measurement recovery in false data injection attacks: A cyber-physical approach. IEEE Transactions on Industrial Informatics, 2020, 16(3): 2031−2043 doi: 10.1109/TII.2019.2921106 [29] Qu F M, Liu J H, Ma Y J, Zang D, Fu M R. A novel wind turbine data imputation method with multiple optimizations based on GANs. Mechanical Systems and Signal Processing, 2020, 139: Article 106610 doi: 10.1016/j.ymssp.2019.106610 [30] Goodfellow I J, Pougetabadie J, Mirza M. Generative adversarial networks. Advances in Neural Information Processing Systems, 2014, 3: 2672−2680 [31] 王坤峰, 苟超, 段艳杰, 林懿伦, 郑心湖, 王飞跃. 生成式对抗网络GAN的研究进展与展望. 自动化学报, 2017, 43(3): 321−332Wang Kun-Feng, Gou Chao, Duan Yan-Jie, Lin Yi-Lun, Zheng Xin-Hu, Wang Fei-Yue. Generative adversarial networks: The state of the art and beyond. Acta Automatica Sinica, 2017, 43(3): 321−332 [32] 刘建伟, 谢浩杰, 罗雄麟. 生成对抗网络在各领域应用研究进展. 自动化学报, 2020, DOI: 10.16383/j.aas.c180831Liu Jian-Wei, Xie Hao-Jie, Luo Xiong-Lin. Research progress on application of generative adversarial networks in various fields. Acta Automatica Sinica, 2020, DOI: 10.16383/j.aas.c180831 [33] 孙秋野, 胡旌伟, 杨凌霄, 张化光. 基于GAN技术的自能源混合建模与参数辨识方法. 自动化学报, 2018, 44(5): 901−914Sun Qiu-Ye, Hu Jing-Wei, Yang Ling-Xiao, Zhang Hua-Guang. We-energy hybrid modeling and parameter identification with GAN technology. Acta Automatica Sinica, 2018, 44(5): 901−914 [34] Mirza M, Osindero S. Conditional generative adversarial nets. arXiv preprint arXiv: 1411.1784, 2014. [35] Isola P, Zhu J Y, Zhou T H, Efros A A. Image-to-image translation with conditional adversarial networks. In: Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, 2017. 1125−1134 [36] 黄雨佳, 孙秋野, 王睿, 黄博南. 面向综合能源系统的静态电压稳定性分析. 中国电机工程学报, 2019, 39(s): 44−53Huang Yu-Jia, Sun Qiu-Ye, Wang Rui, Huang Bo-Nan. Static voltage stability analysis for integrated energy system. Proceedings of the CSEE, 2019, 39(s): 44−53 [37] Ronneberger O, Fischer P, Brox T. U-net: Convolutional networks for biomedical image segmentation. In: Proceedings of the 2015 International Conference on Medical Image Computing and Computer-assisted Intervention. Springer, Cham, 2015. 234−241 -

 下载:
下载:




计量
- 文章访问数: 1556
- HTML全文浏览量: 1305
- PDF下载量: 352
- 被引次数: 0
