

Interval Estimation for Sensor Fault Based on Robust Positive Invariant Set
-
摘要: 针对具有传感器故障和未知扰动与测量噪声的线性离散系统, 提出了一种传感器故障区间估计方法. 将传感器故障视为增广状态, 原始系统转化为一个等效的广义系统. 为了得到故障的点估计同时抑制扰动和噪声的影响, 基于有界实引理设计了一个针对广义系统的鲁棒状态观测器. 然后, 通过中心对称多胞体技术实现对故障的区间估计并基于鲁棒正不变集给出了一种降低区间估计计算量的方法. 最后, 通过一个垂直起降(Vertical take-off and landing, VTOL)飞行器线性化模型的仿真算例验证了所提出方法的有效性与优越性.Abstract: This paper proposes an interval estimation method of sensor fault for linear discrete-time system with unknown disturbances and measurement noise. A descriptor system, which is equivalent to the original system is constructed by considering the fault as an auxiliary state. Based on the descriptor system, a robust augmented state observer is designed by using bounded real lemma to obtain the point-estimation of sensor fault and attenuate the effects of disturbances and measurement noise. Then, the zonotope technique is used to realize the interval estimation of fault. Moreover, a method to reduce the computational complexity of interval estimation is proposed based on robust positive invariant set. Finally, numerical simulation of a vertical take-off and landing (VTOL) aircraft linear model is given to illustrate the effectiveness and superiority of the proposed approach.
-
Key words:
- Fault estimation /
- observer /
- invariant set /
- zonotope /
- interval estimation
-
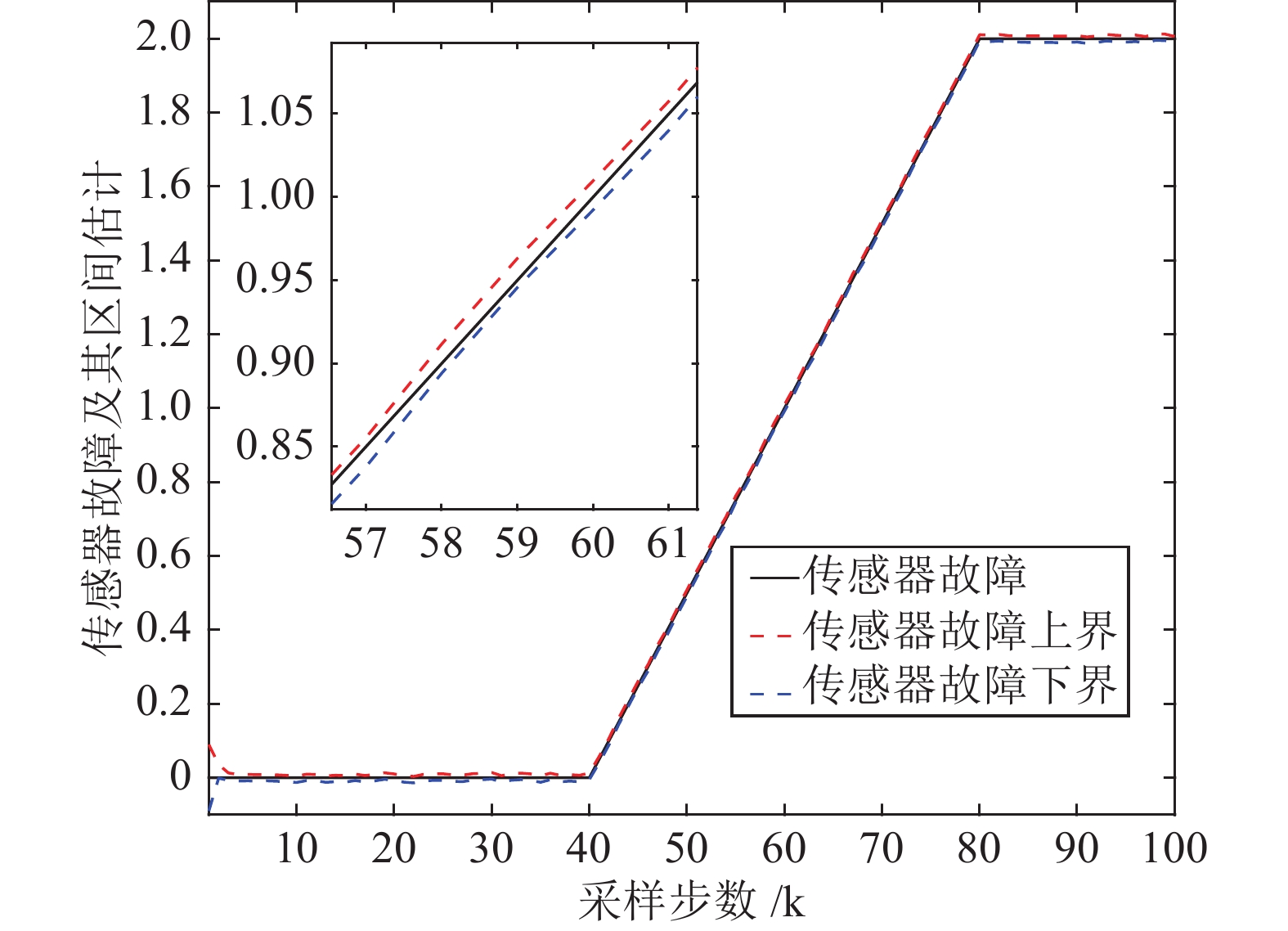
图 1 垂直起降飞行器线性化模型的传感器故障及其区间估计结果
Fig. 1 Sensor fault and its interval estimation results of the VTOL aircraft linear model
-
[1] 周东华, 胡艳艳. 动态系统的故障诊断技术. 自动化学报, 2009, 35(6): 748−758Zhou Dong-Hua, Hu Yan-Yan. Fault diagnosis techniques for dynamic systems. Acta Automatica Sinica, 2009, 35(6): 748−758 [2] 姜斌, 冒泽慧, 杨浩, 张友民. 控制系统的故障诊断与故障调节. 北京: 国防工业出版社, 2009.Jiang Bin, Mao Ze-Hui, Yang Hao, Zhang You-Min. Fault Diagnosis and Fault Accommodation for Control Systems. Beijing: National Defense Industry Press, 2009. [3] Li Y Y, Karimi H R, Zhang Q, Zhao D, Li Y B. Fault detection for linear discrete time-varying systems subject to random sensor delay: A Riccati equation approach. IEEE Transactions on Circuits and Systems I: Regular Papers, 2018, 65(5): 1707−1716 doi: 10.1109/TCSI.2017.2763625 [4] Wang Z H, Shi P, Lim C C. H–/H∞ fault detection observer in finite frequency domain for linear parameter-varying descriptor systems. Automatica, 2017, 86: 38−45 doi: 10.1016/j.automatica.2017.08.021 [5] Yu X, Fu Y, Zhang Y M. Aircraft fault accommodation with consideration of actuator control authority and gyro availability. IEEE Transactions on Control Systems Technology, 2018, 26(4): 1285−1299 doi: 10.1109/TCST.2017.2707378 [6] 张柯, 姜斌. 基于故障诊断观测器的输出反馈容错控制设计. 自动化学报, 2010, 36(2): 274−281Zhang Ke, Jiang Bin. Fault diagnosis observer-based output feedback fault tolerant control design. Acta Automatica Sinica, 2010, 36(2): 274−281 [7] Liu L J, Shen Y, Dowell E H, Zhu C H. A general H∞ fault tolerant control and management for a linear system with actuator faults. Automatica, 2012, 48(8): 1676−1682 doi: 10.1016/j.automatica.2012.05.018 [8] Li X H, Zhu F L, Xu L Y. Actuator and sensor fault reconstructions for uncertain Lipschitz nonlinear systems based on H∞ observers. Asian Journal of Control, 2015, 17(6): 2206−2217 doi: 10.1002/asjc.1123 [9] Wang Z H, Shen Y, Zhang X L. Actuator fault estimation for a class of nonlinear descriptor systems. International Journal of Systems Science, 2014, 45(3): 487−496 doi: 10.1080/00207721.2012.724100 [10] Du D S, Xu S Y, Cocquempot V. Actuator fault estimation for discrete-time switched systems with finite-frequency. Systems & Control Letters, 2017, 108: 64−70 [11] Zhang K, Jiang B, Shi P, Xu J F. Fault estimation observer design for discrete-time systems in finite-frequency domain. International Journal of Robust and Nonlinear Control, 2015, 25(9): 1379−1398 doi: 10.1002/rnc.v25.9 [12] Gao Z W, Ding S X. Fault estimation and fault-tolerant control for descriptor systems via proportional, multiple-integral and derivative observer design. IET Control Theory & Applications, 2007, 1(5): 1208−1218 [13] Liu G S, Zhang K, Jiang B. Adaptive observer-based fast fault estimation of a leader-follower linear multi-agent system with actuator faults. In: Proceedings of the 34th Chinese Control Conference. Hangzhou, China: IEEE, 2015. 6340−6344 [14] Liu M, Shi P. Sensor fault estimation and tolerant control for Itô stochastic systems with a descriptor sliding mode approach. Automatica, 2013, 49(5): 1242−1250 doi: 10.1016/j.automatica.2013.01.030 [15] Raïssi T, Efimov D, Zolghadri A. Interval state estimation for a class of nonlinear systems. IEEE Transactions on Automatic Control, 2012, 57(1): 260−265 doi: 10.1109/TAC.2011.2164820 [16] 郭胜辉, 朱芳来. 广义系统区间观测器设计. 控制与决策, 2016, 31(2): 361−366Guo Sheng-Hui, Zhu Fang-Lai. Interval observers design for descriptor systems. Control and Decision, 2016, 31(2): 361−366 [17] Le V T H, Stoica C, Alamo T, Camacho E F, Dumur D. Zonotopic guaranteed state estimation for uncertain systems. Automatica, 2013, 49(11): 3418−3424 doi: 10.1016/j.automatica.2013.08.014 [18] Guo S H, Zhu F L. Actuator fault detection and interval reconstruction based on interval observers. In: Processings of the 20th World Congress of the International Federation of Automatic Control. Toulouse, France: IEEE, 2017. 50(1): 5061−5066 [19] Olaru S, De Doná J A, Seron M M, Stoican F. Positive invariant sets for fault tolerant multisensor control schemes. International Journal of Control, 2010, 83(12): 2622−2640 doi: 10.1080/00207179.2010.535215 [20] Martínez J J. Minimal RPI sets computation for polytopic systems using the bounded-real lemma and a new shrinking procedure. International Federation of Automatic Control, 2015, 48(26): 182−187 [21] Meslem N, Loukkas N, Martínez J J. Using set invariance to design robust interval observers for discrete-time linear systems. International Journal of Robust and Nonlinear Control, 2018, 28(11): 3623−3639 doi: 10.1002/rnc.v28.11 [22] Blesa J, Puig V, Saludes J. Identification for passive robust fault detection using zonotope-based set-membership approaches. International Journal of Adaptive Control and Signal Processing, 2011, 25(9): 788−812 doi: 10.1002/acs.v25.9 [23] 汤文涛, 王振华, 王烨, 沈毅. 基于未知输入集员滤波器的不确定系统故障诊断. 自动化学报, 2018, 44(9): 1717−1724Tang Wen-Tao, Wang Zhen-Hua, Wang Ye, Shen Yi. Fault diagnosis for uncertain systems based on unknown input setmembership filters. Acta Automatica Sinica, 2018, 44(9): 1717−1724 [24] 李佶桃, 王振华, 沈毅. 线性离散系统的有限频域集员故障检测观测器设计. 自动化学报, 2020, 46(7): 1531−1538 doi: 10.16383/j.aas.c170725Li Ji-Tao, Wang Zhen-Hua, Shen Yi. Set-membership fault detection observer design in finite-frequency domain for linear discrete-time system. Acta Automatica Sinica, 2020, 46(7): 1531−1538 doi: 10.16383/j.aas.c170725 [25] Combastel C. Merging Kalman filtering and zonotopic state bounding for robust fault detection under noisy environment. International Federation of Automatic Control, 2015, 48(21): 289−295 [26] Blesa J, Puig V, Saludes J. Robust identification and fault diagnosis based on uncertain multiple input-multiple output linear parameter varying parity equations and zonotopes. Journal of Process Control, 2012, 22(10): 1890−1912 doi: 10.1016/j.jprocont.2012.09.007 [27] Scott J K, Raimondo D M, Marseglia G R, Richard Braatzc R D. Constrained zonotopes: A new tool for set-based estimation and fault detection. Automatica, 2016, 69: 126−136 doi: 10.1016/j.automatica.2016.02.036 [28] Combastel C. An extended zonotopic and Gaussian Kalman filter (EZGKF) merging set-membership and stochastic paradigms: Toward nonlinear filtering and fault detection. Annual Reviews in Control, 2016, 42: 232−243 doi: 10.1016/j.arcontrol.2016.07.002 [29] Wang Z H, Shen Y, Zhang X L, Wang Q. Observer design for discrete-time descriptor systems: An LMI approach. Systems & Control Letters, 2012, 61(6): 683−687 [30] Boyd S, Ghaoui L E, Feron E, Balakrishnan V. Linear matrix inequalities in system and control theory. Society for Industrial and Applied Mathematics, 1995, 37(3): 479−481 [31] Kofman E, Haimovich H, Seron M M. A systematic method to obtain ultimate bounds for perturbed systems. International Journal of Control, 2007, 80(2): 167−178 doi: 10.1080/00207170600611265 [32] Combastel C. Zonotopes and Kalman observers: Gain optimality under distinct uncertainty paradigms and robust convergence. Automatica, 2015, 55: 265−273 doi: 10.1016/j.automatica.2015.03.008 [33] Zhou M, Wang Z H, Shen Y. Fault detection and isolation method based on H−/H∞ unknown input observer design in finite frequency domain. Asian Journal of Control, 2017, 19(5): 1777−1790 [34] Jia Q X, Li H Y, Zhang Y C, Chen X Q. Robust observerbased sensor fault reconstruction for discrete-time systems via a descriptor system approach. International Journal of Control, Automation and Systems, 2015, 13(2): 274−283 doi: 10.1007/s12555-014-0098-0 -

 下载:
下载:

图(2)
计量
- 文章访问数: 1392
- HTML全文浏览量: 151
- PDF下载量: 211
- 被引次数: 0
