2020年 第46卷 第6期
2020, 46(6): 1063-1089.
doi: 10.16383/j.aas.c190005
cstr: 32138.14.j.aas.c190005
摘要:
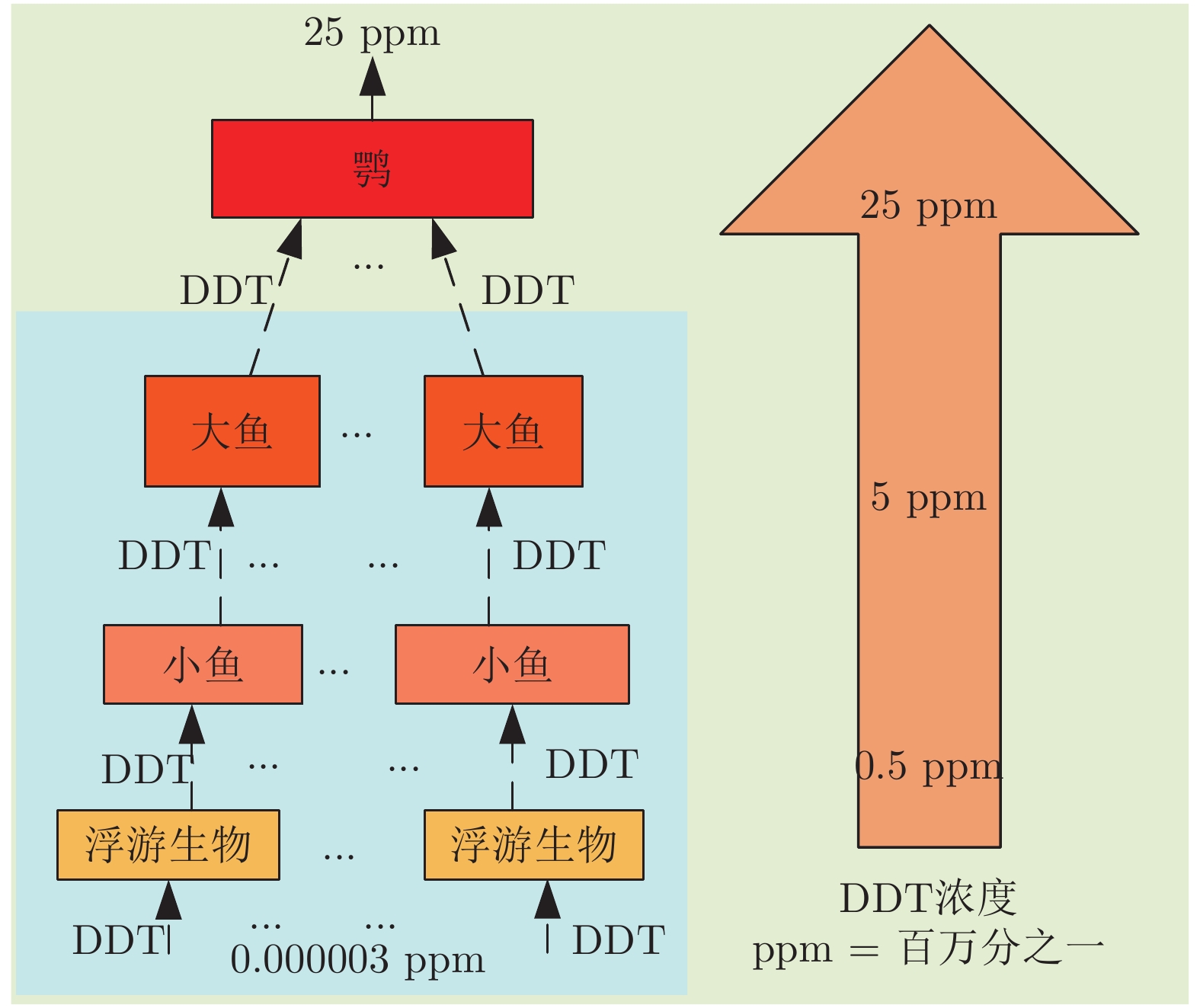
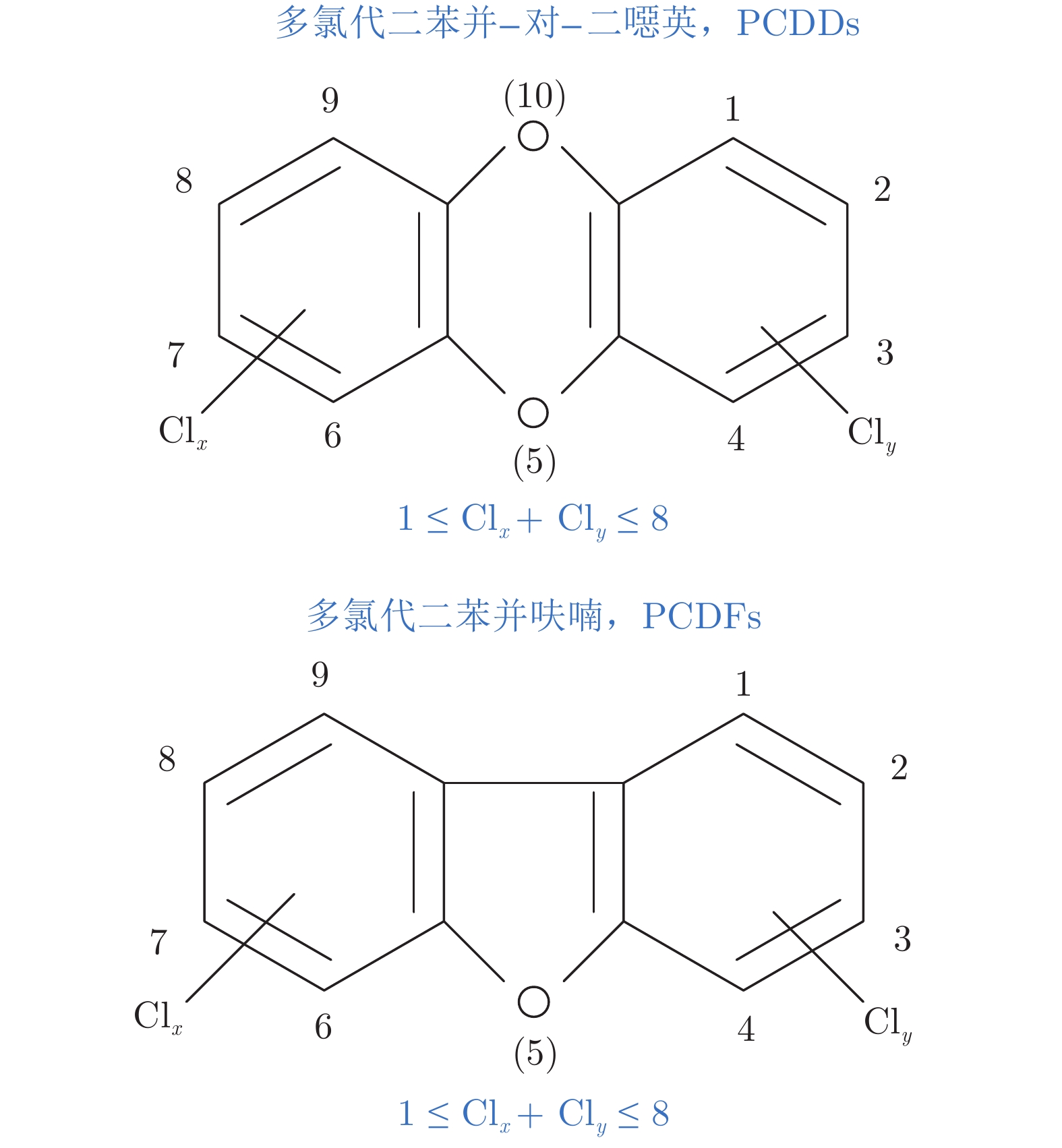
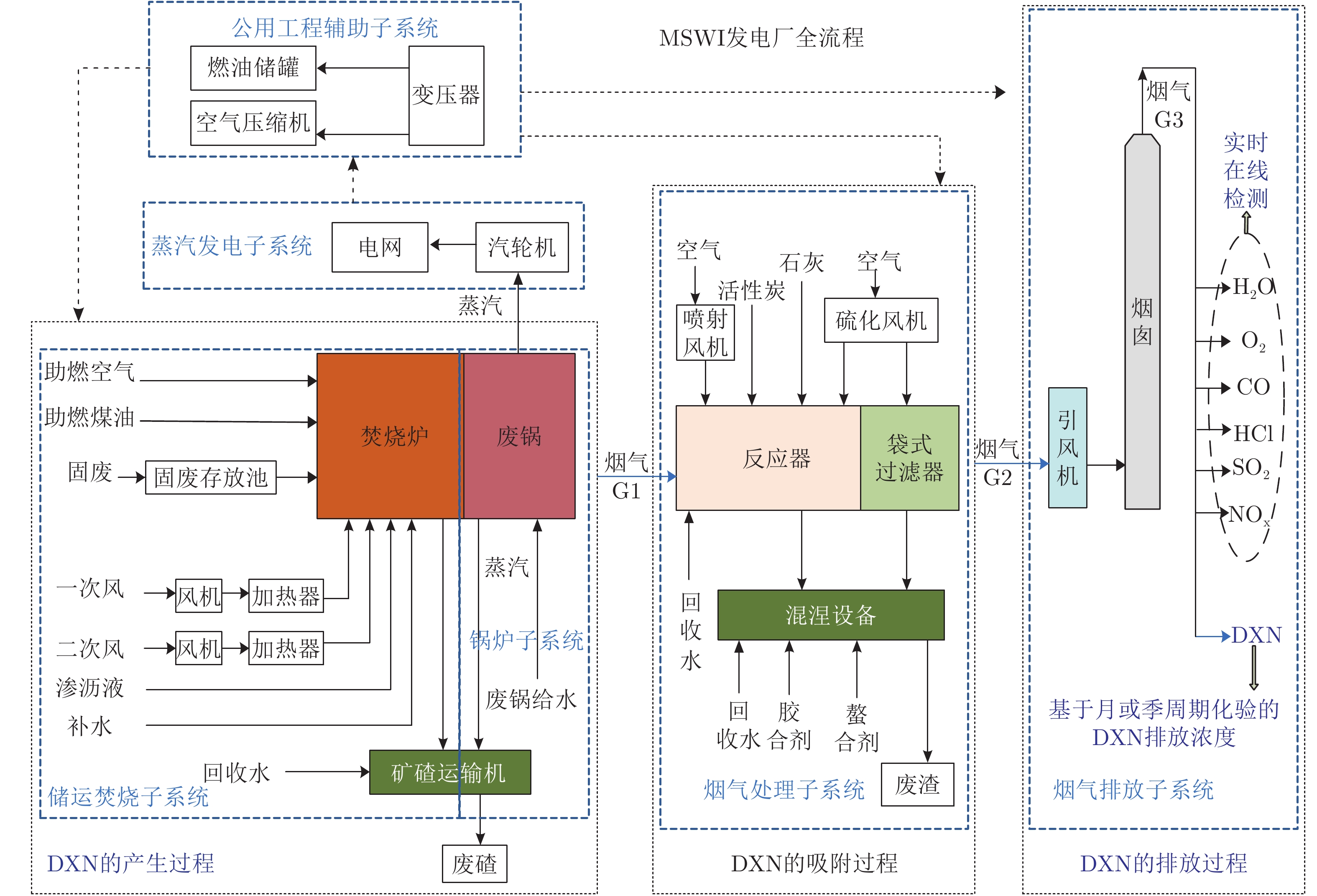
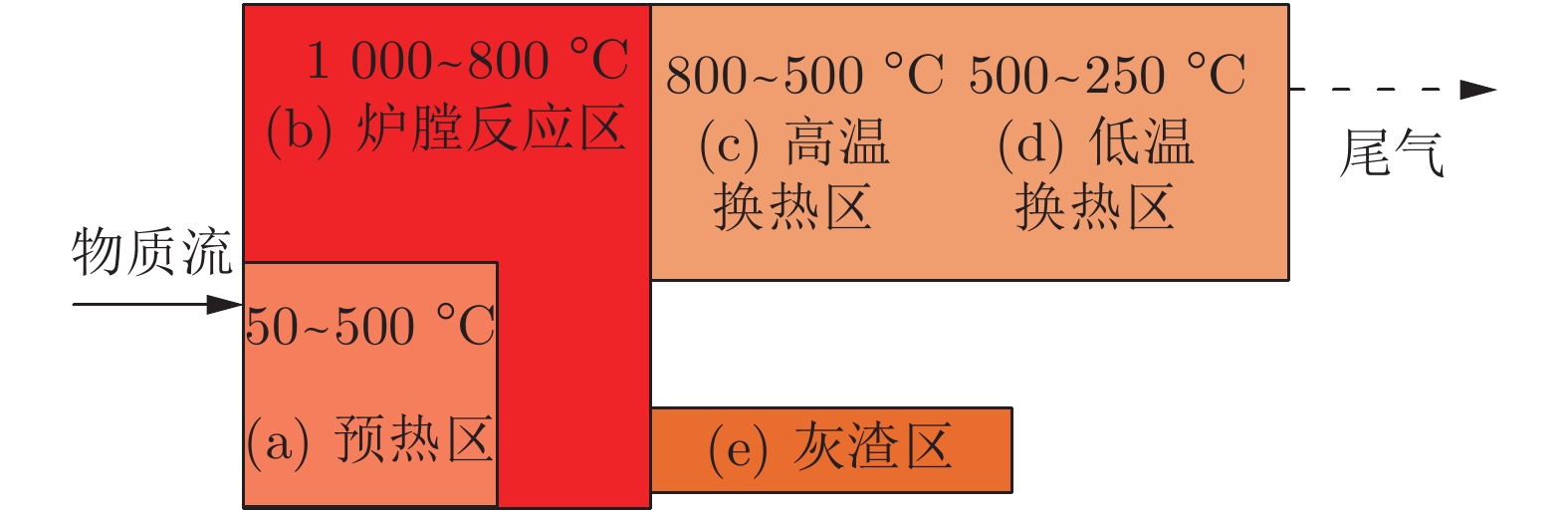
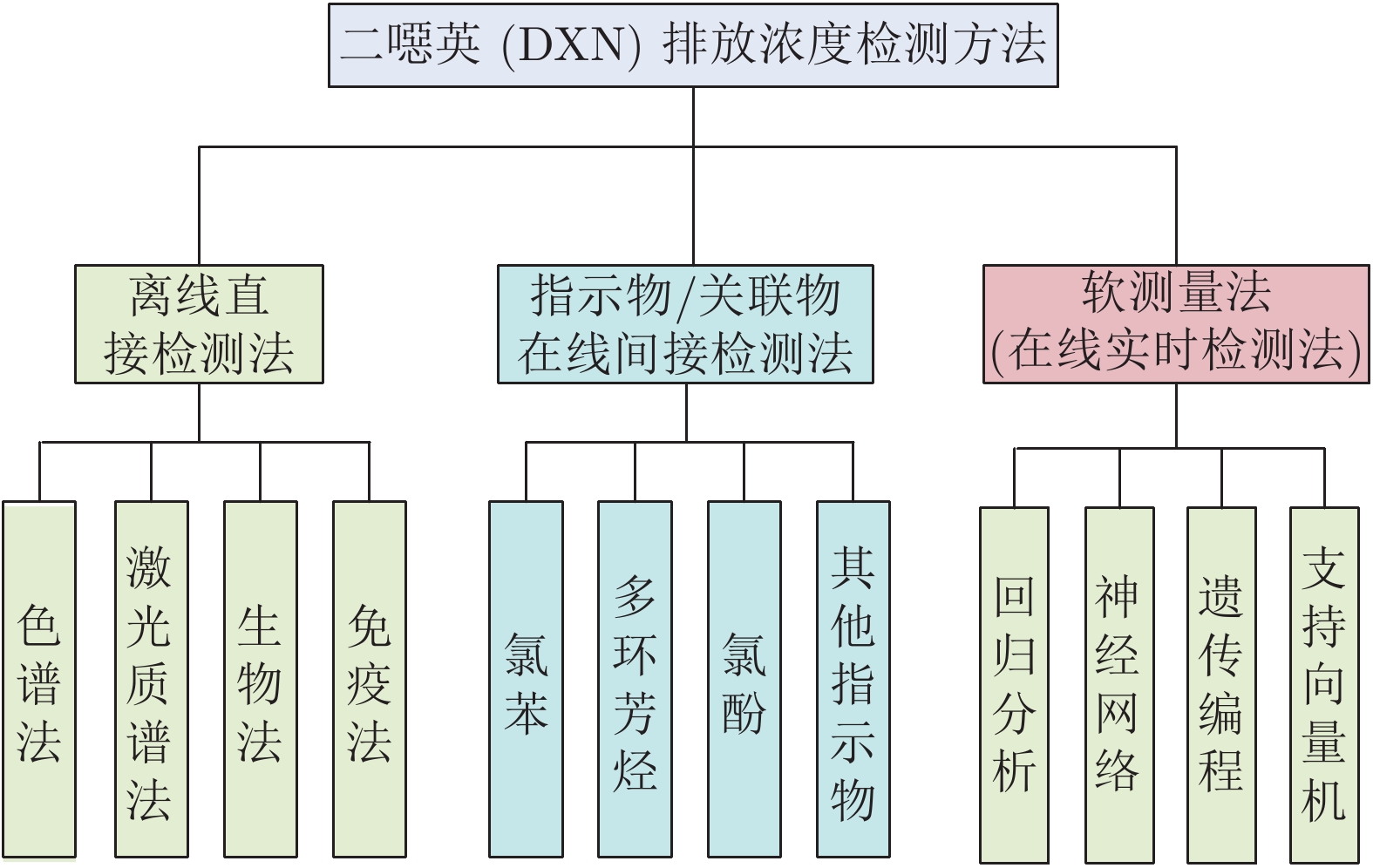
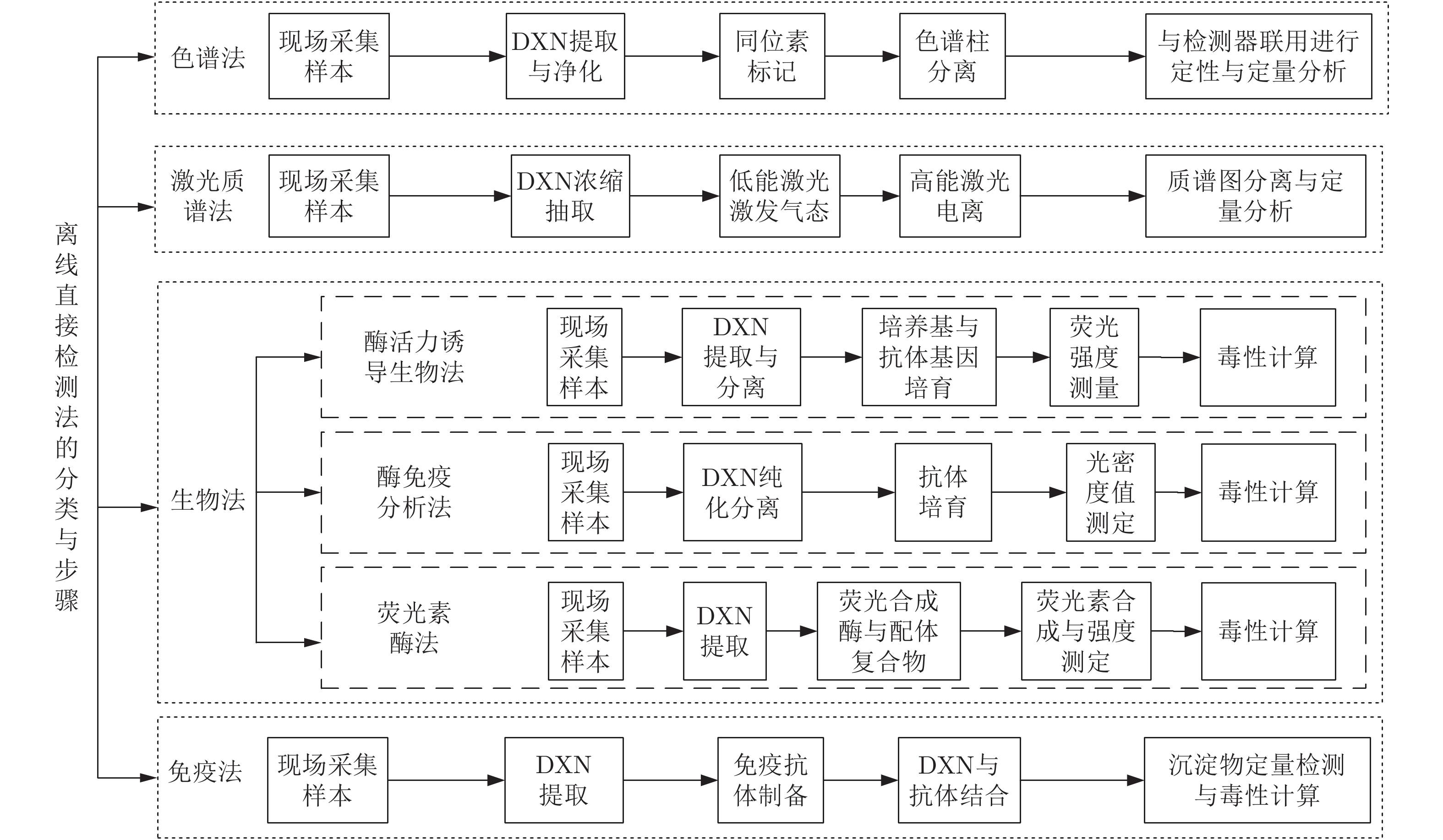
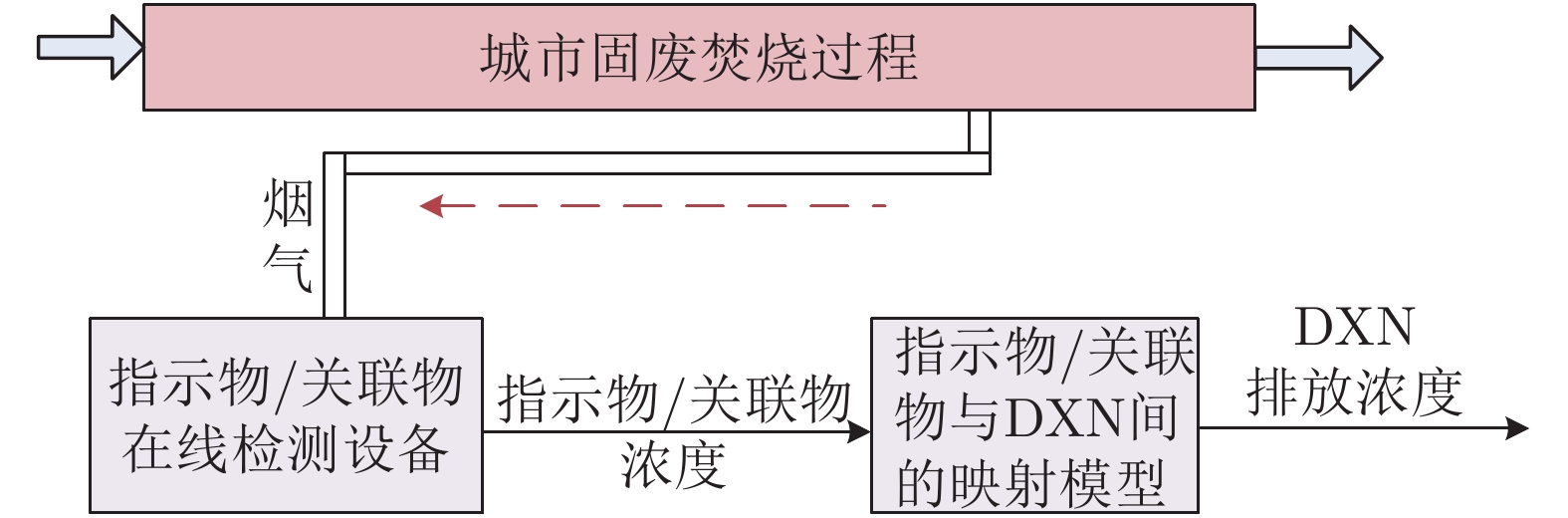
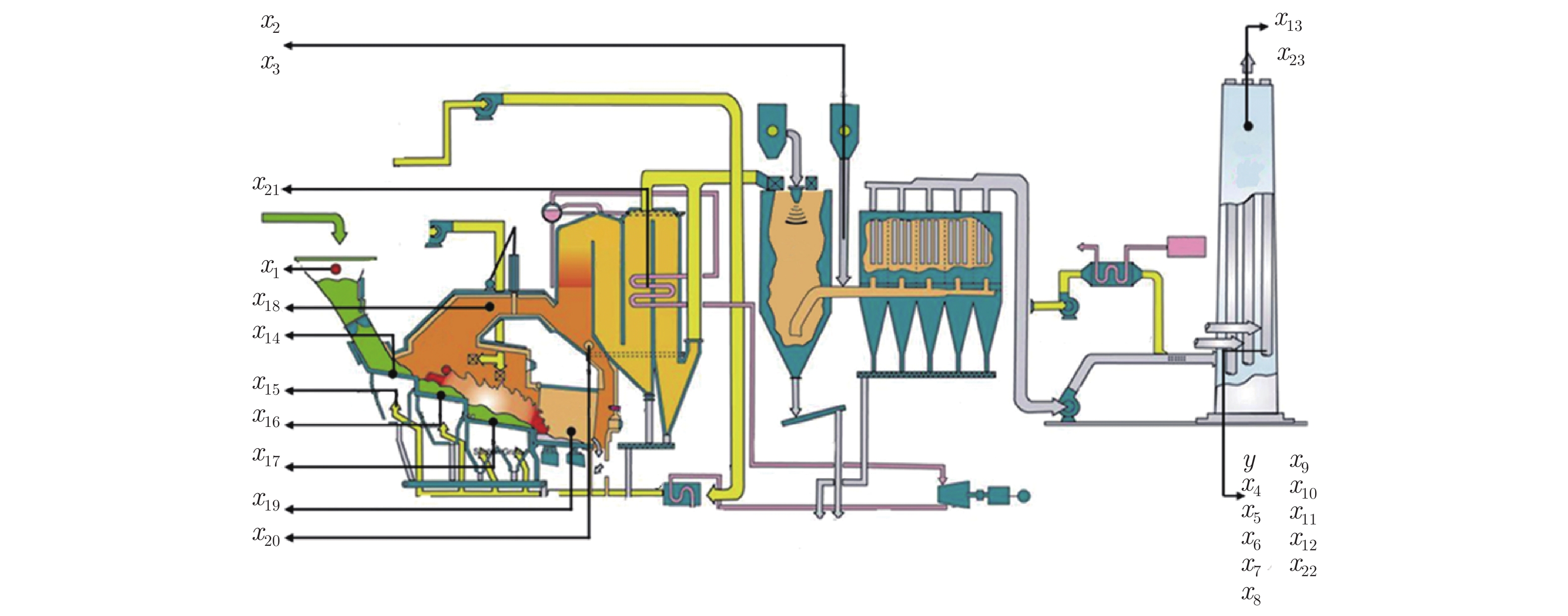
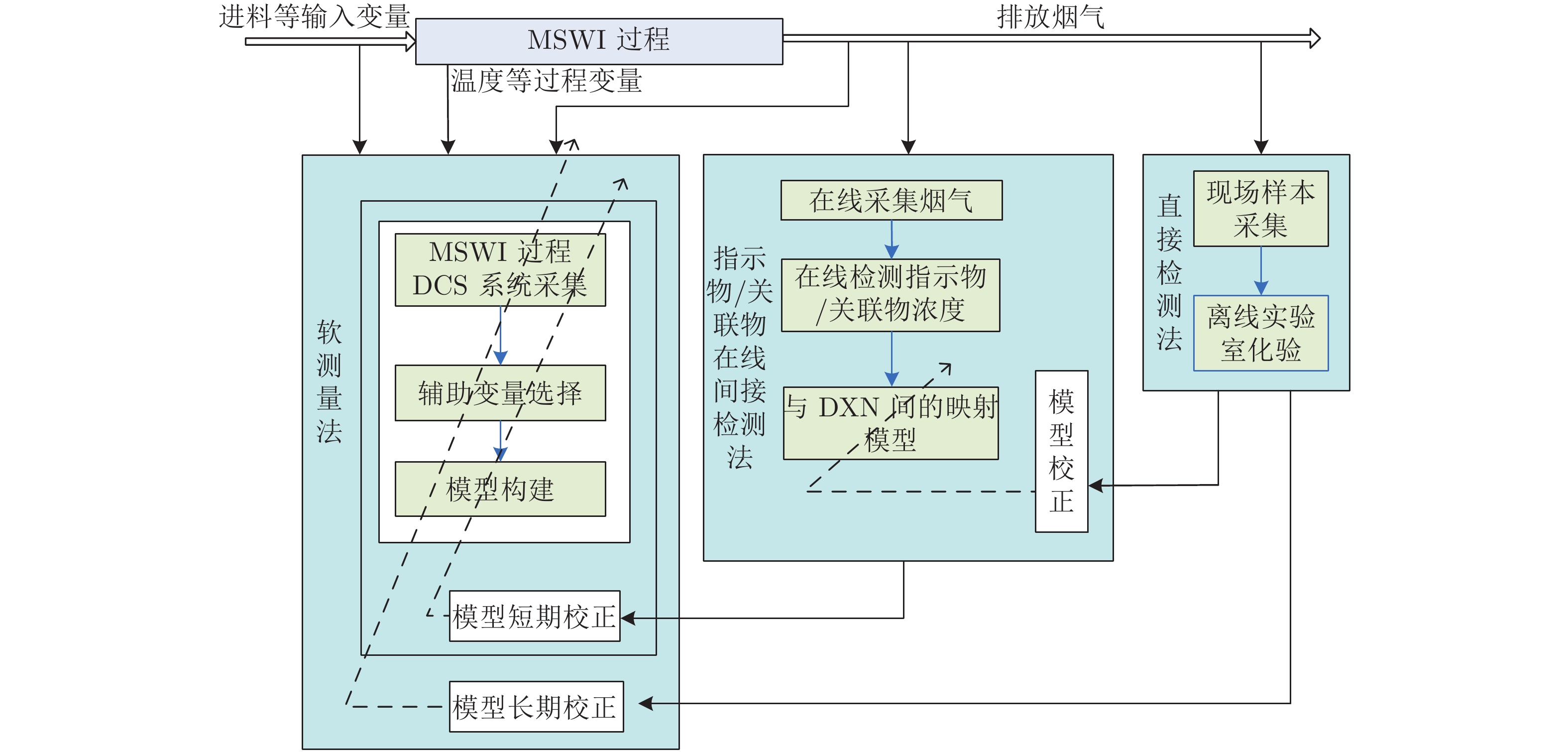
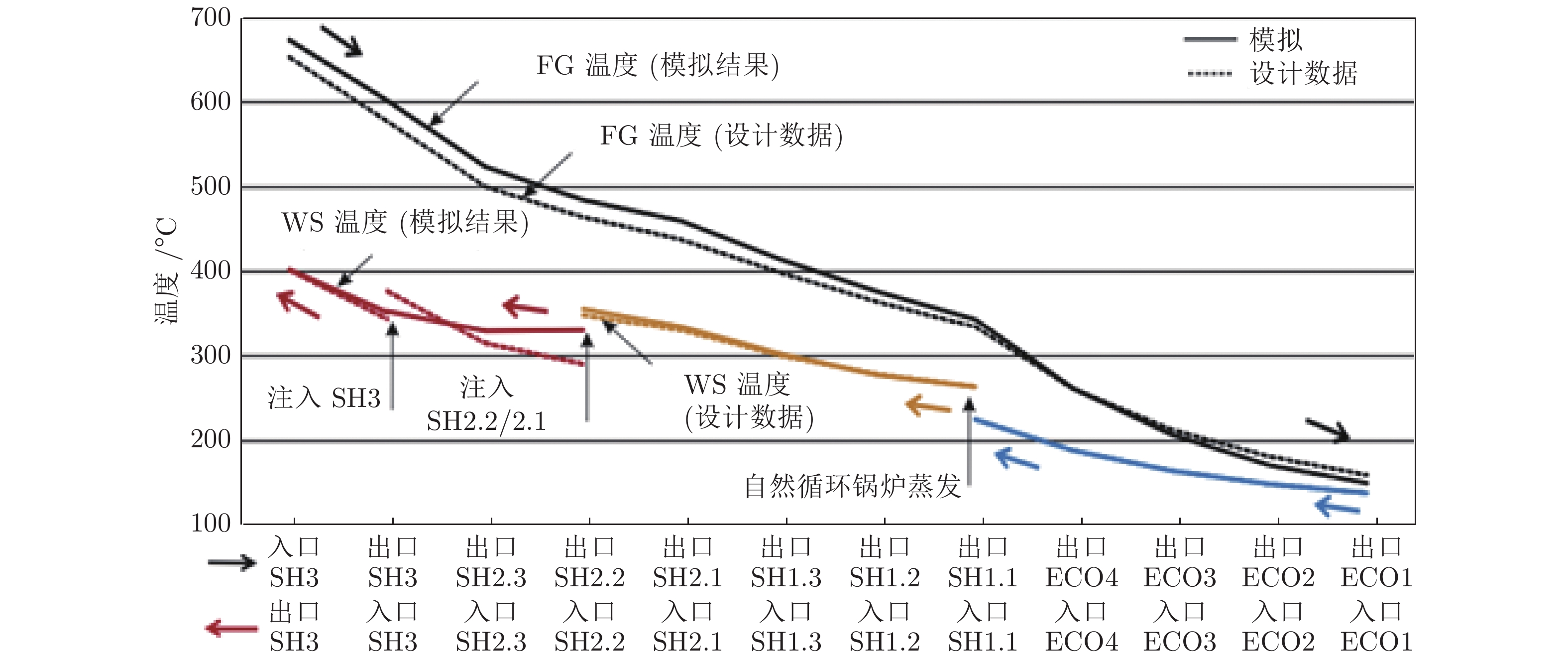
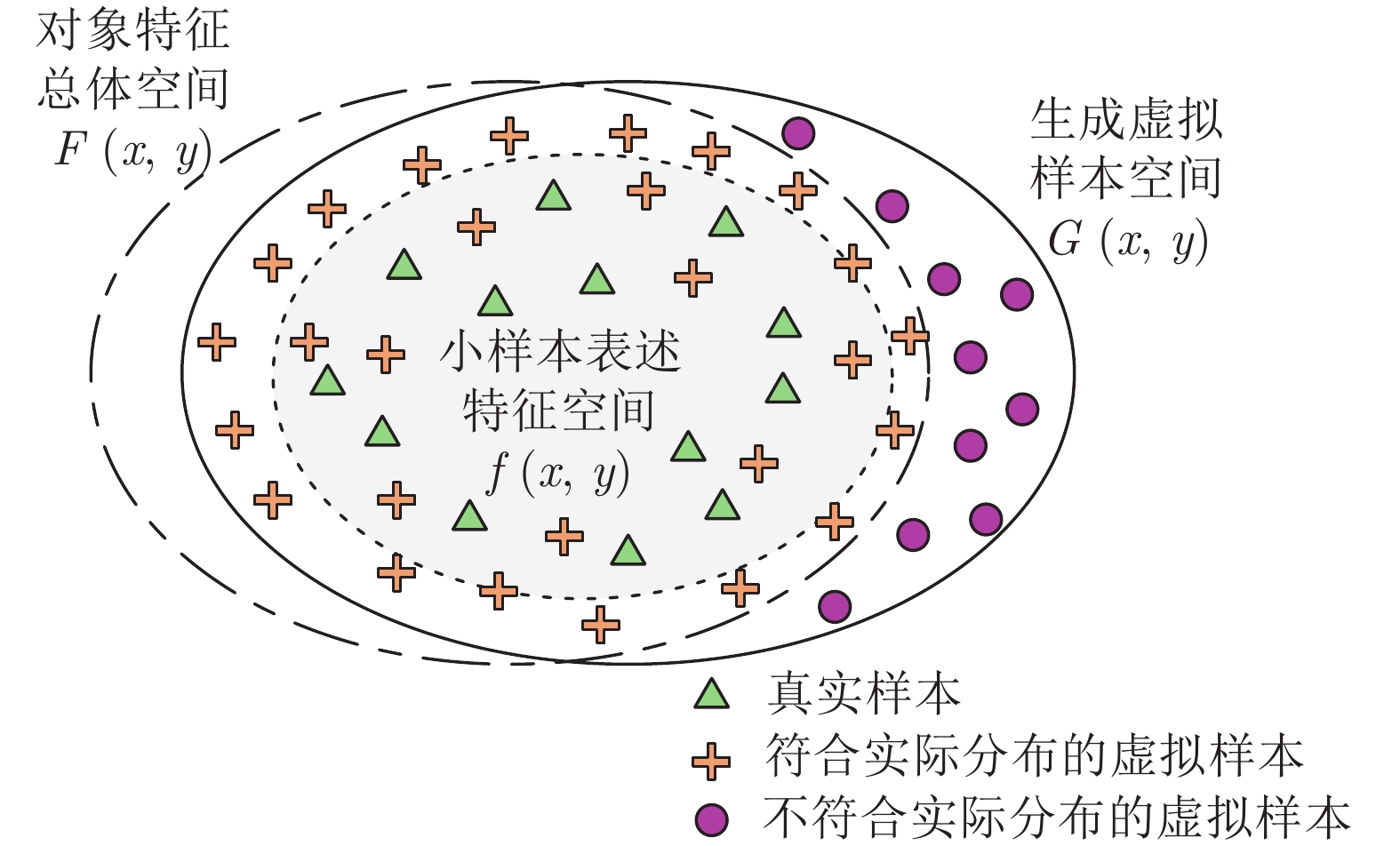
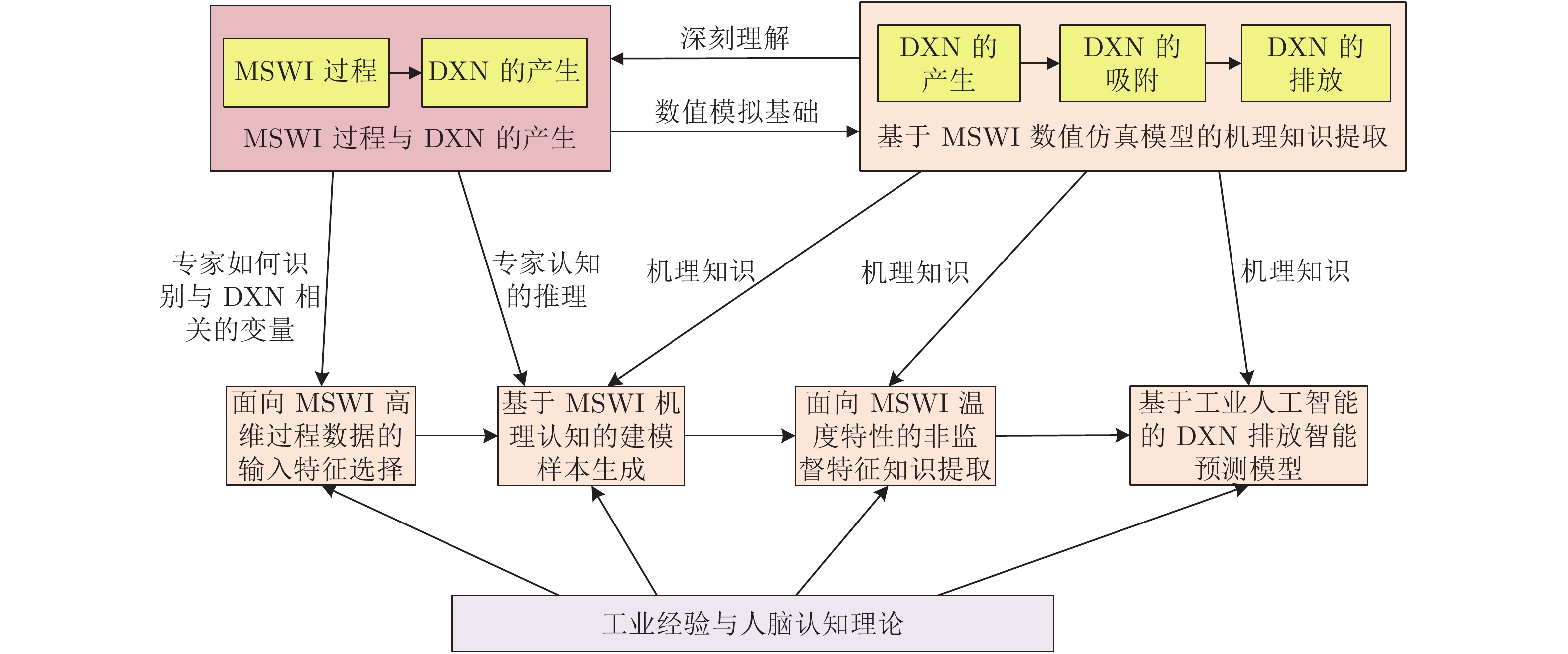
焚烧在城市固体废物(Municipal solid wastes, MSW)的无害化、减量化和资源化处理方面优势显著. MSW焚烧(MSW incineration, MSWI)过程副产品之一的剧毒持久性污染物二噁英(Dioxins, DXN)是造成焚烧建厂“邻避效应”的主要原因. DXN排放浓度难以在线实时检测的工业现状已成为制约MSWI过程运行优化与城市环境污染控制的瓶颈. 首先, 结合典型MSWI过程分析DXN的生成特性与排放控制策略; 接着, 将DXN排放浓度检测方法从测量原理、复杂度和时间尺度等视角分为离线直接检测法、指示物/关联物在线间接检测法和软测量法并进行综述; 然后, 对不同方法的发展阶段和关联性进行分析, 指出各自的优劣性和相互间的互补性, 结合MSWI过程特点归纳基于过程数据进行DXN排放浓度软测量的难点, 并将其提炼为一类面向小样本高维稀疏标记数据的智能建模问题; 最后, 指出进行DXN排放浓度智能软测量的未来研究方向和发展前景.
焚烧在城市固体废物(Municipal solid wastes, MSW)的无害化、减量化和资源化处理方面优势显著. MSW焚烧(MSW incineration, MSWI)过程副产品之一的剧毒持久性污染物二噁英(Dioxins, DXN)是造成焚烧建厂“邻避效应”的主要原因. DXN排放浓度难以在线实时检测的工业现状已成为制约MSWI过程运行优化与城市环境污染控制的瓶颈. 首先, 结合典型MSWI过程分析DXN的生成特性与排放控制策略; 接着, 将DXN排放浓度检测方法从测量原理、复杂度和时间尺度等视角分为离线直接检测法、指示物/关联物在线间接检测法和软测量法并进行综述; 然后, 对不同方法的发展阶段和关联性进行分析, 指出各自的优劣性和相互间的互补性, 结合MSWI过程特点归纳基于过程数据进行DXN排放浓度软测量的难点, 并将其提炼为一类面向小样本高维稀疏标记数据的智能建模问题; 最后, 指出进行DXN排放浓度智能软测量的未来研究方向和发展前景.

2020, 46(6): 1090-1120.
doi: 10.16383/j.aas.c180564
cstr: 32138.14.j.aas.c180564
摘要:
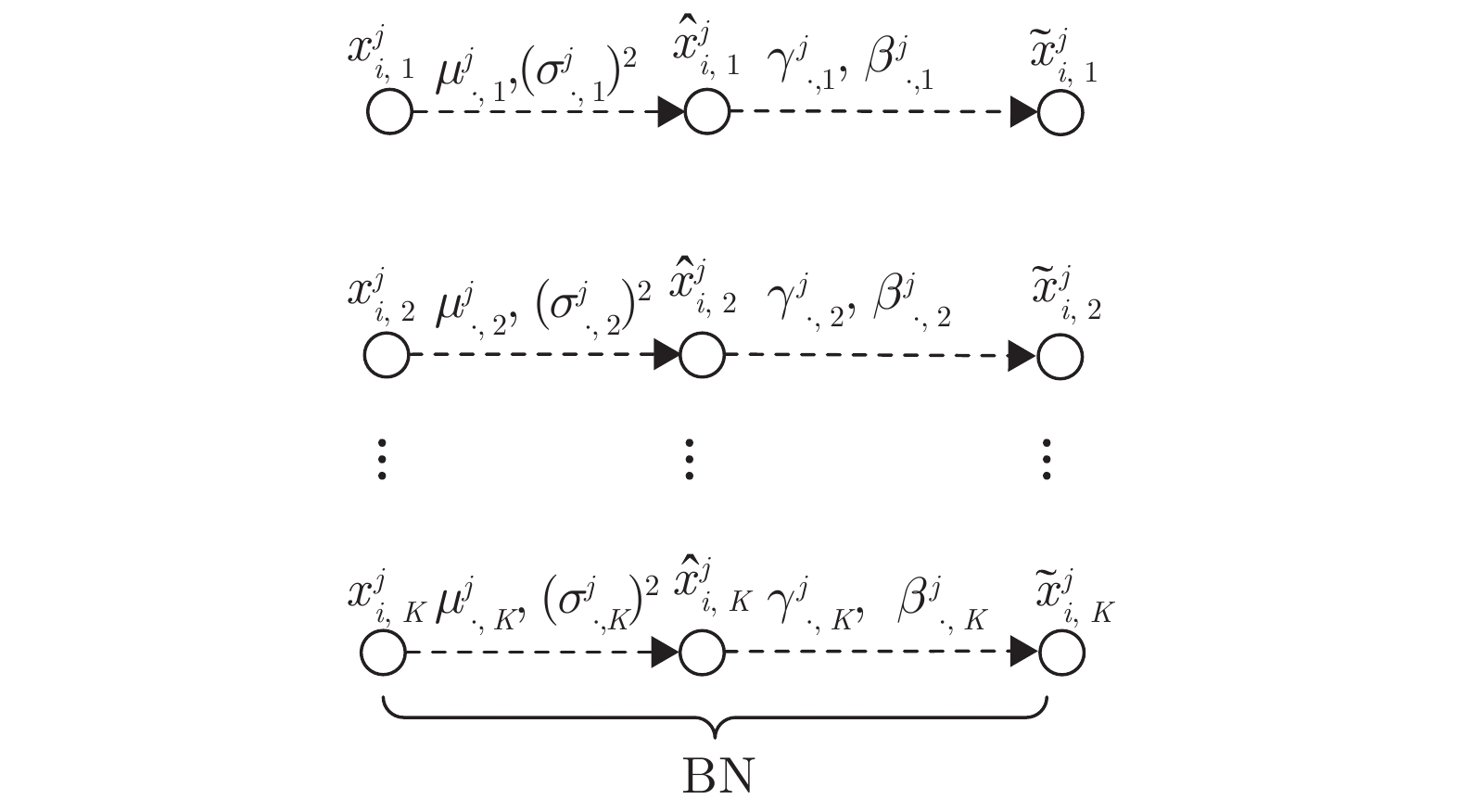
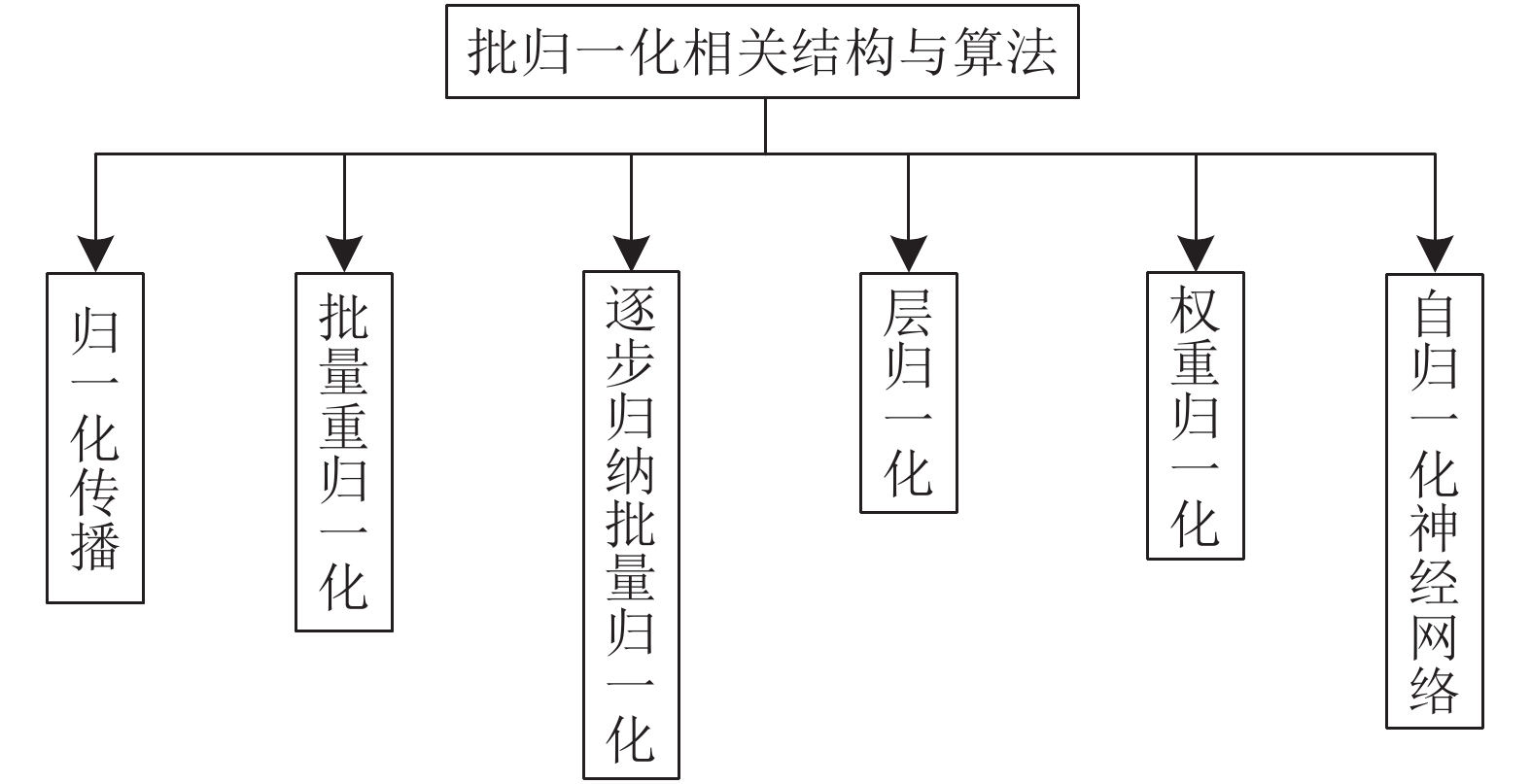
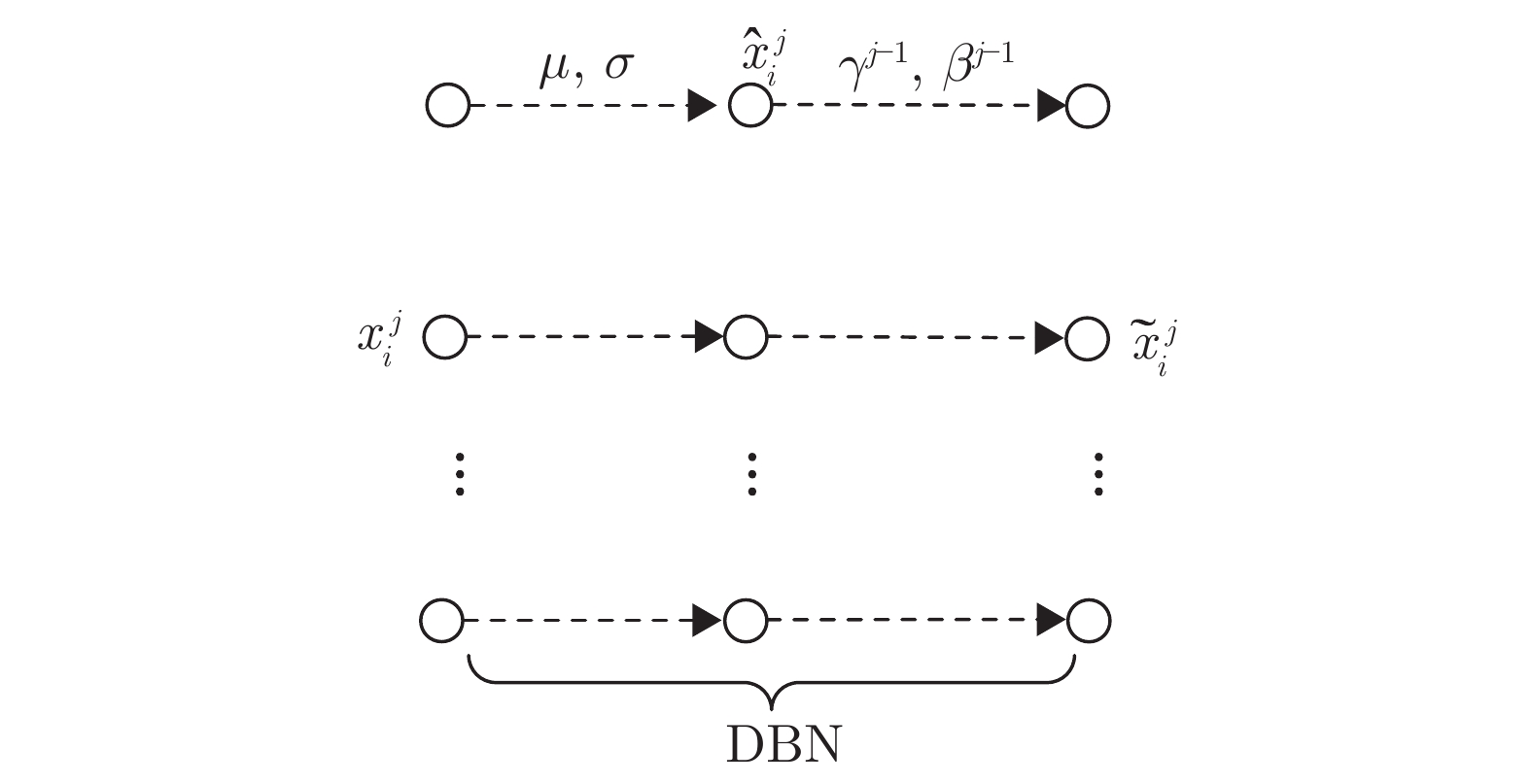
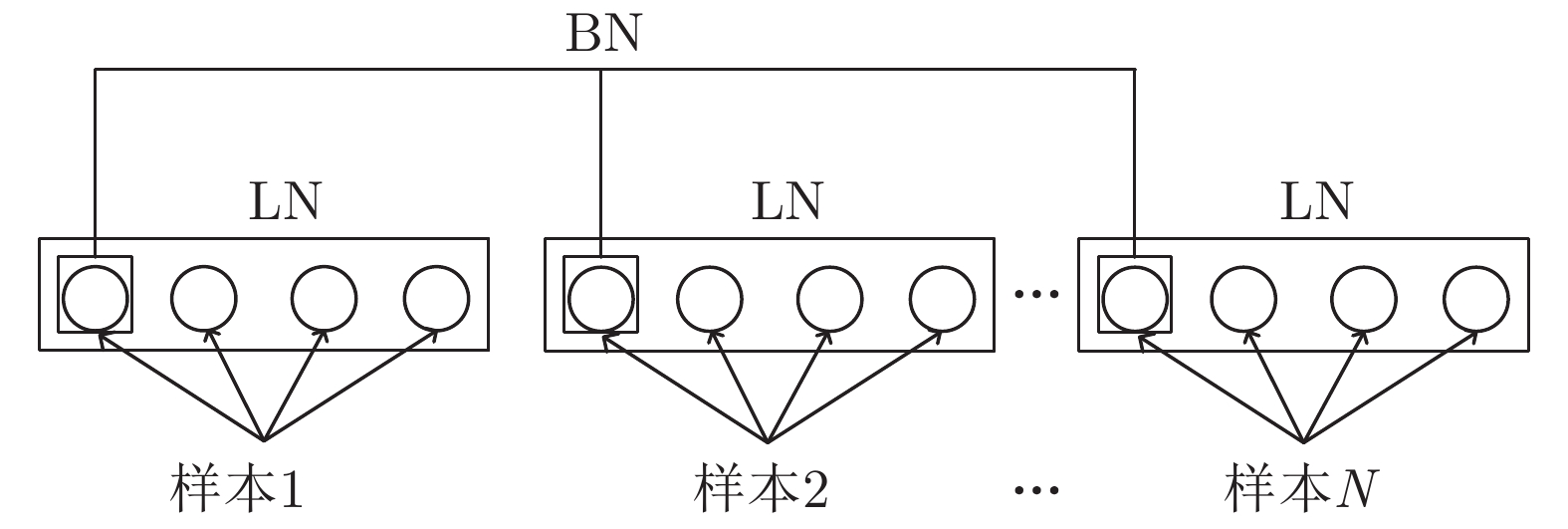
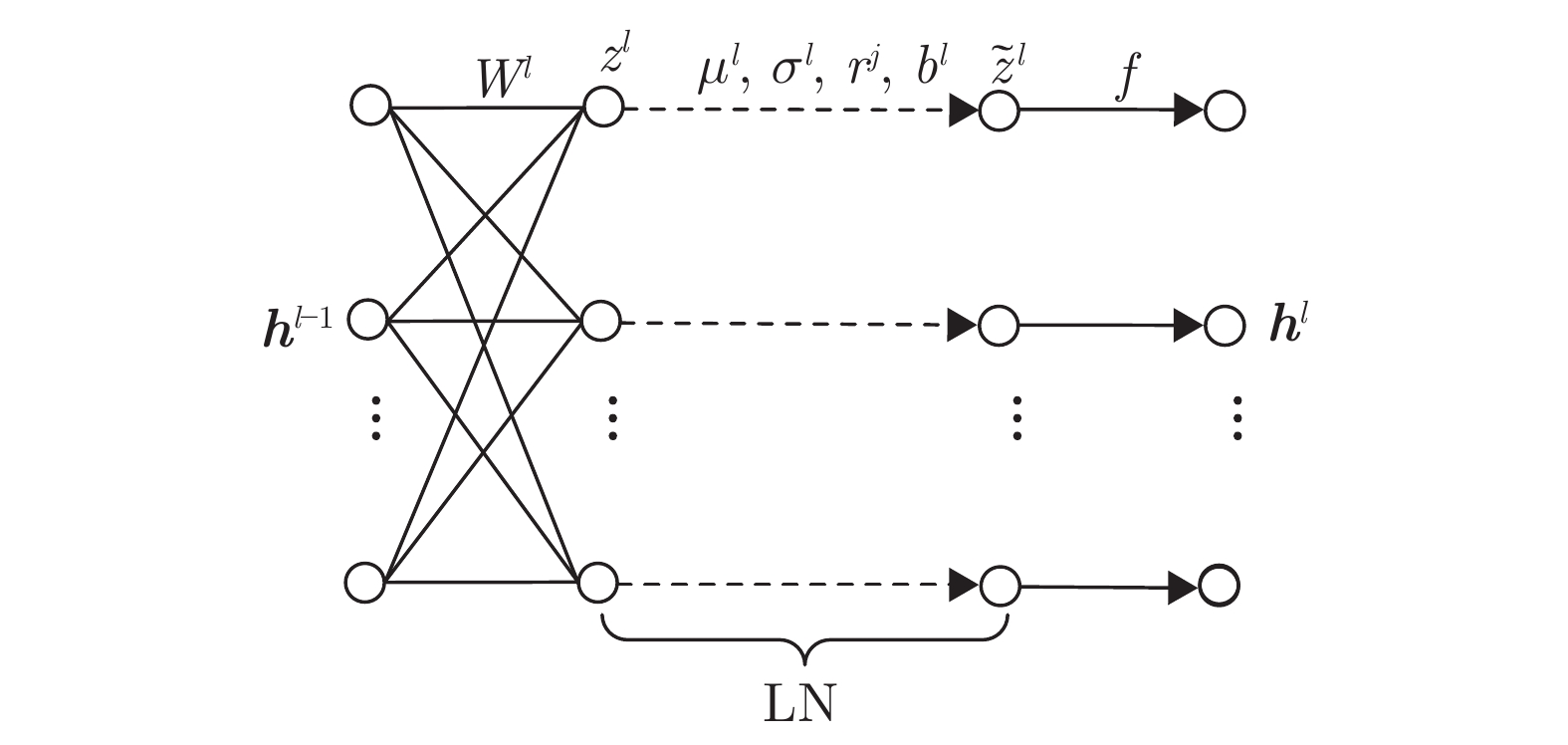
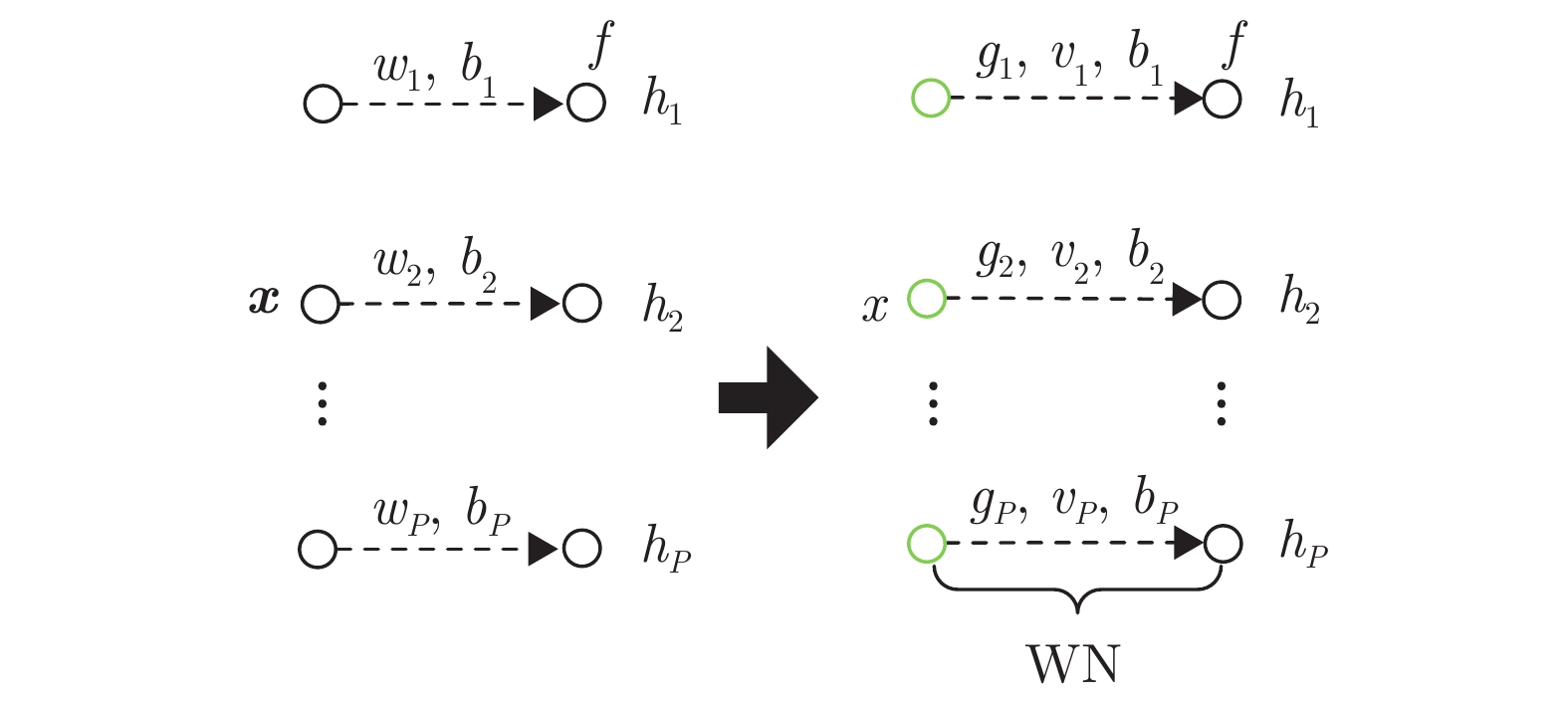
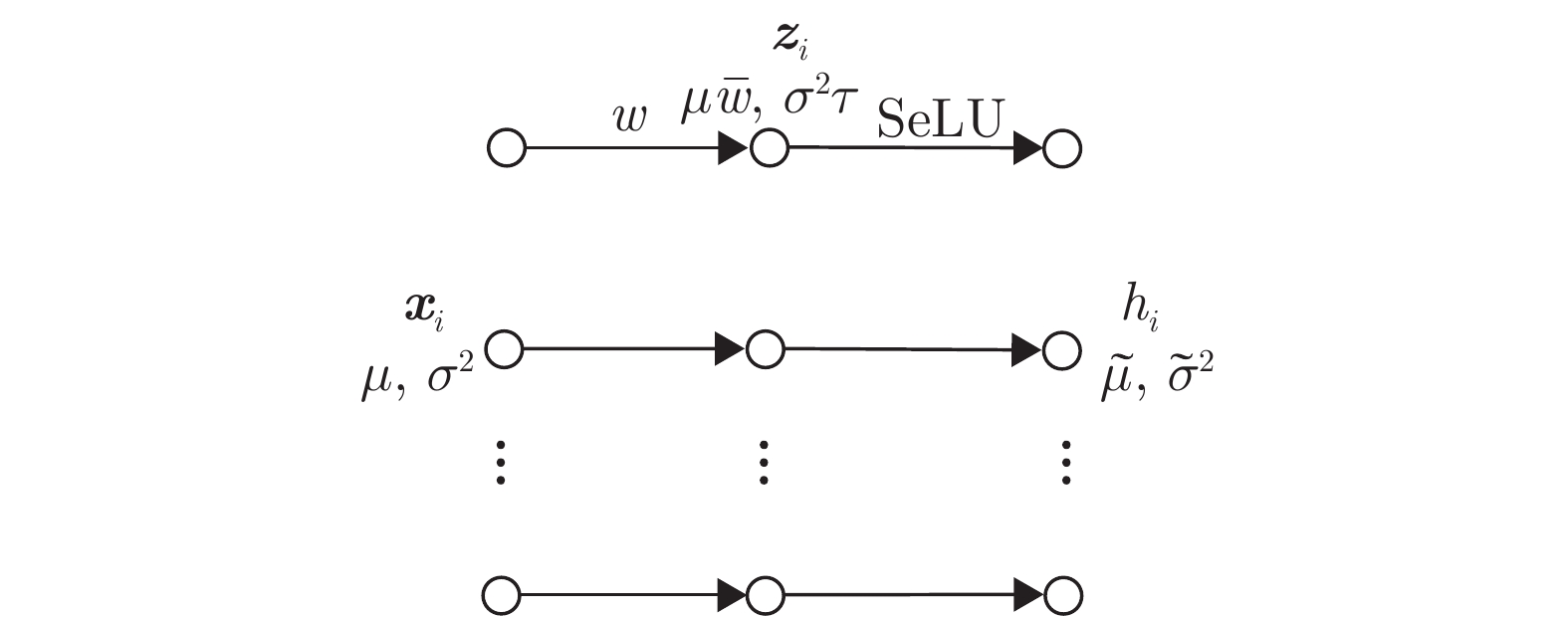
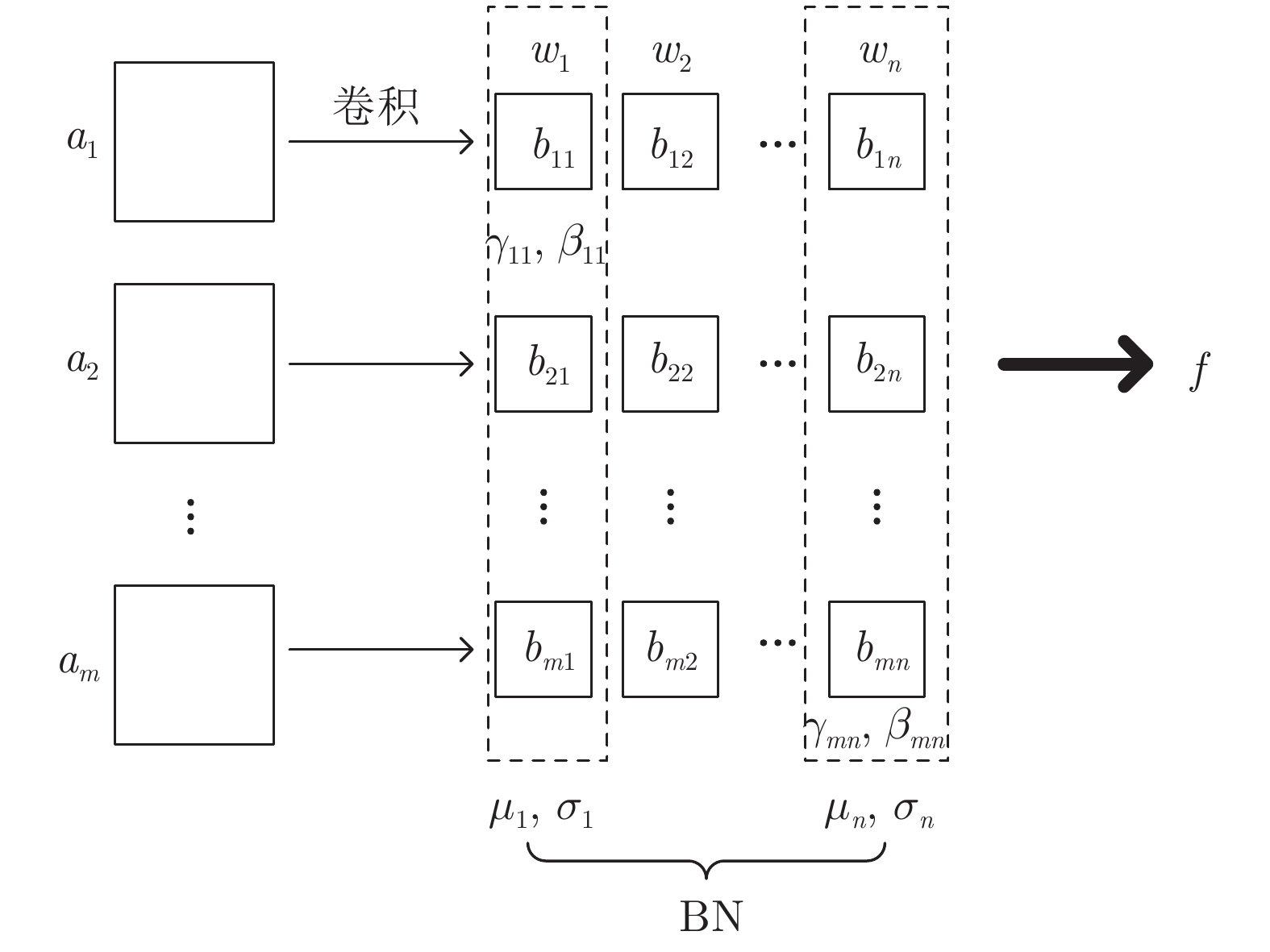
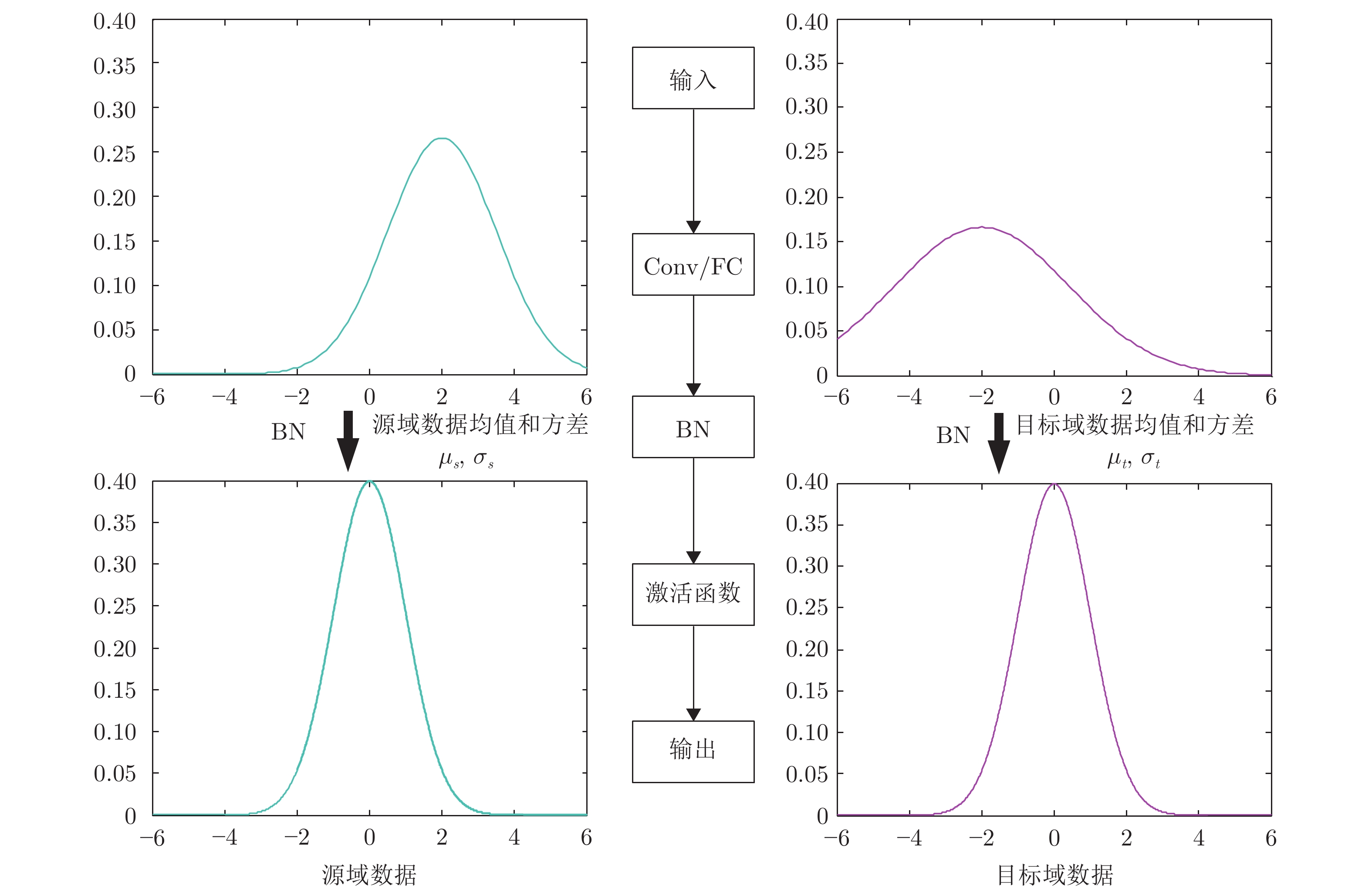
深度学习已经广泛应用到各个领域, 如计算机视觉和自然语言处理等, 并都取得了明显优于早期机器学习算法的效果. 在信息技术飞速发展的今天, 训练数据逐渐趋于大数据集, 深度神经网络不断趋于大型化, 导致训练越来越困难, 速度和精度都有待提升. 2013年, Ioffe等指出训练深度神经网络过程中存在一个严重问题: 中间协变量迁移(Internal covariate shift), 使网络训练过程对参数初值敏感、收敛速度变慢, 并提出了批归一化(Batch normalization, BN)方法, 以减少中间协变量迁移问题, 加快神经网络训练过程收敛速度. 目前很多网络都将BN作为一种加速网络训练的重要手段, 鉴于BN的应用价值, 本文系统综述了BN及其相关算法的研究进展. 首先对BN的原理进行了详细分析. BN虽然简单实用, 但也存在一些问题, 如依赖于小批量数据集的大小、训练和推理过程对数据处理方式不同等, 于是很多学者相继提出了BN的各种相关结构与算法, 本文对这些结构和算法的原理、优势和可以解决的主要问题进行了分析与归纳. 然后对BN在各个神经网络领域的应用方法进行了概括总结, 并且对其他常用于提升神经网络训练性能的手段进行了归纳. 最后进行了总结, 并对BN的未来研究方向进行了展望.
深度学习已经广泛应用到各个领域, 如计算机视觉和自然语言处理等, 并都取得了明显优于早期机器学习算法的效果. 在信息技术飞速发展的今天, 训练数据逐渐趋于大数据集, 深度神经网络不断趋于大型化, 导致训练越来越困难, 速度和精度都有待提升. 2013年, Ioffe等指出训练深度神经网络过程中存在一个严重问题: 中间协变量迁移(Internal covariate shift), 使网络训练过程对参数初值敏感、收敛速度变慢, 并提出了批归一化(Batch normalization, BN)方法, 以减少中间协变量迁移问题, 加快神经网络训练过程收敛速度. 目前很多网络都将BN作为一种加速网络训练的重要手段, 鉴于BN的应用价值, 本文系统综述了BN及其相关算法的研究进展. 首先对BN的原理进行了详细分析. BN虽然简单实用, 但也存在一些问题, 如依赖于小批量数据集的大小、训练和推理过程对数据处理方式不同等, 于是很多学者相继提出了BN的各种相关结构与算法, 本文对这些结构和算法的原理、优势和可以解决的主要问题进行了分析与归纳. 然后对BN在各个神经网络领域的应用方法进行了概括总结, 并且对其他常用于提升神经网络训练性能的手段进行了归纳. 最后进行了总结, 并对BN的未来研究方向进行了展望.




2020, 46(6): 1121-1135.
doi: 10.16383/j.aas.c180834
cstr: 32138.14.j.aas.c180834
摘要:
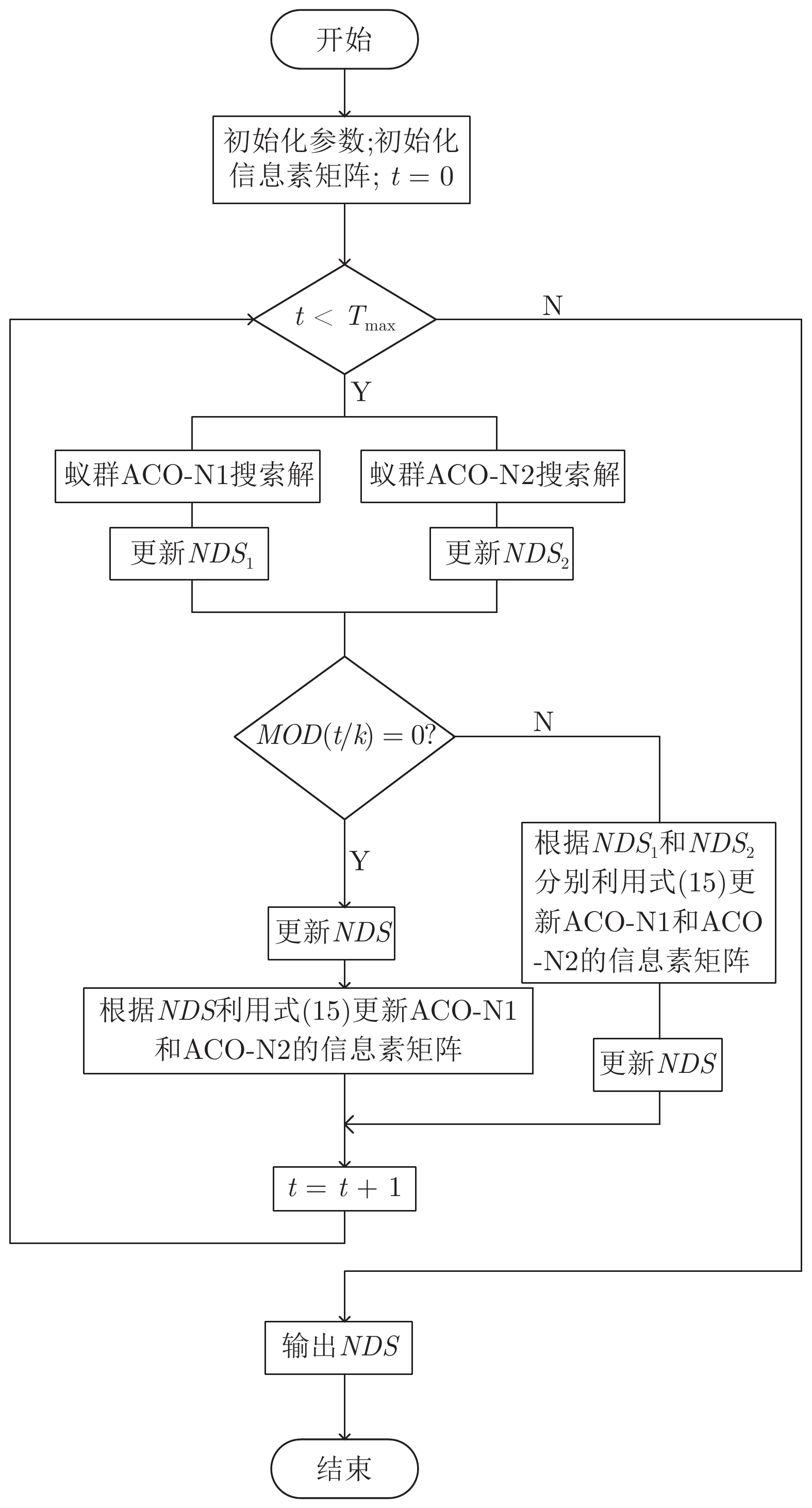
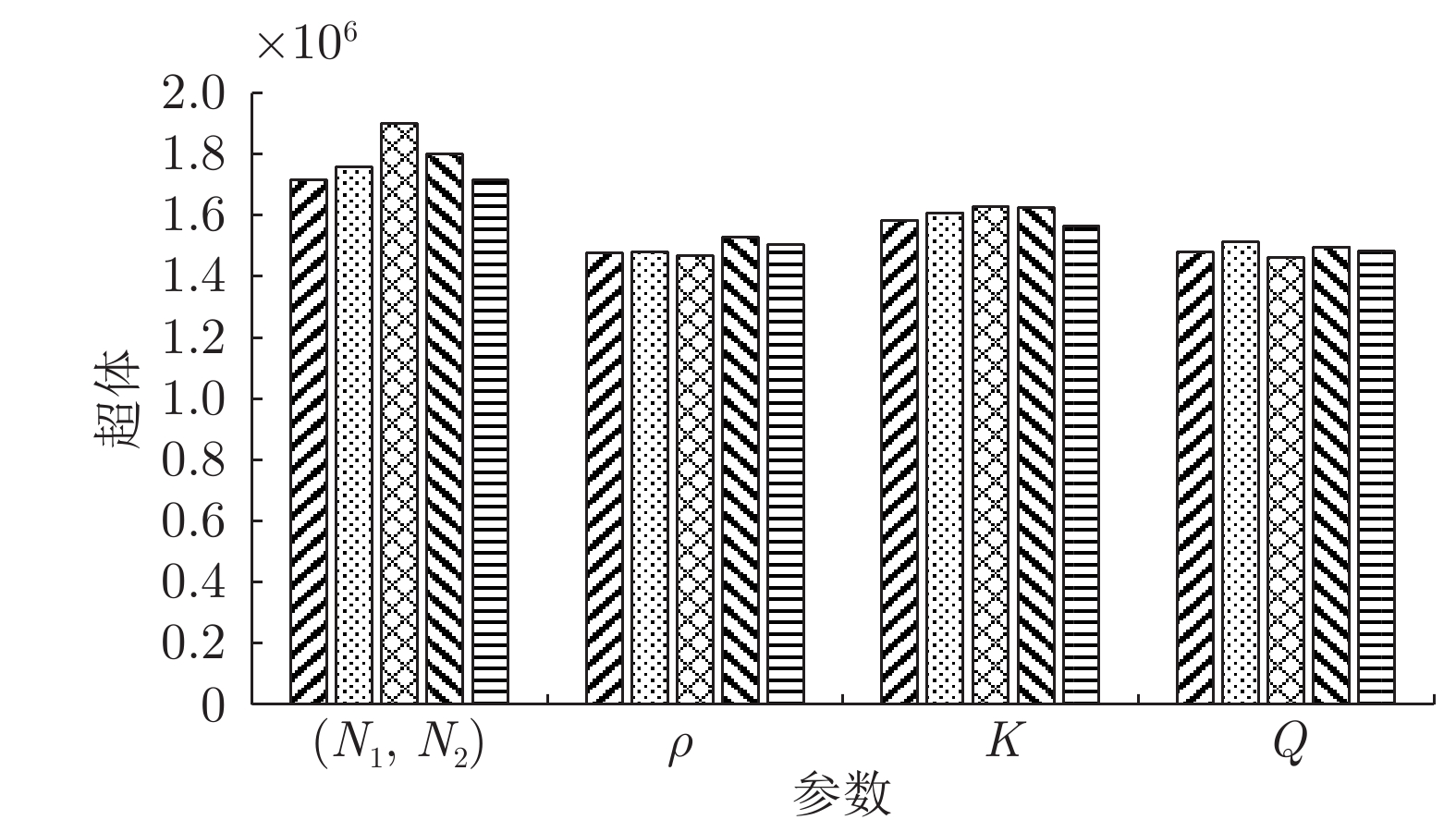
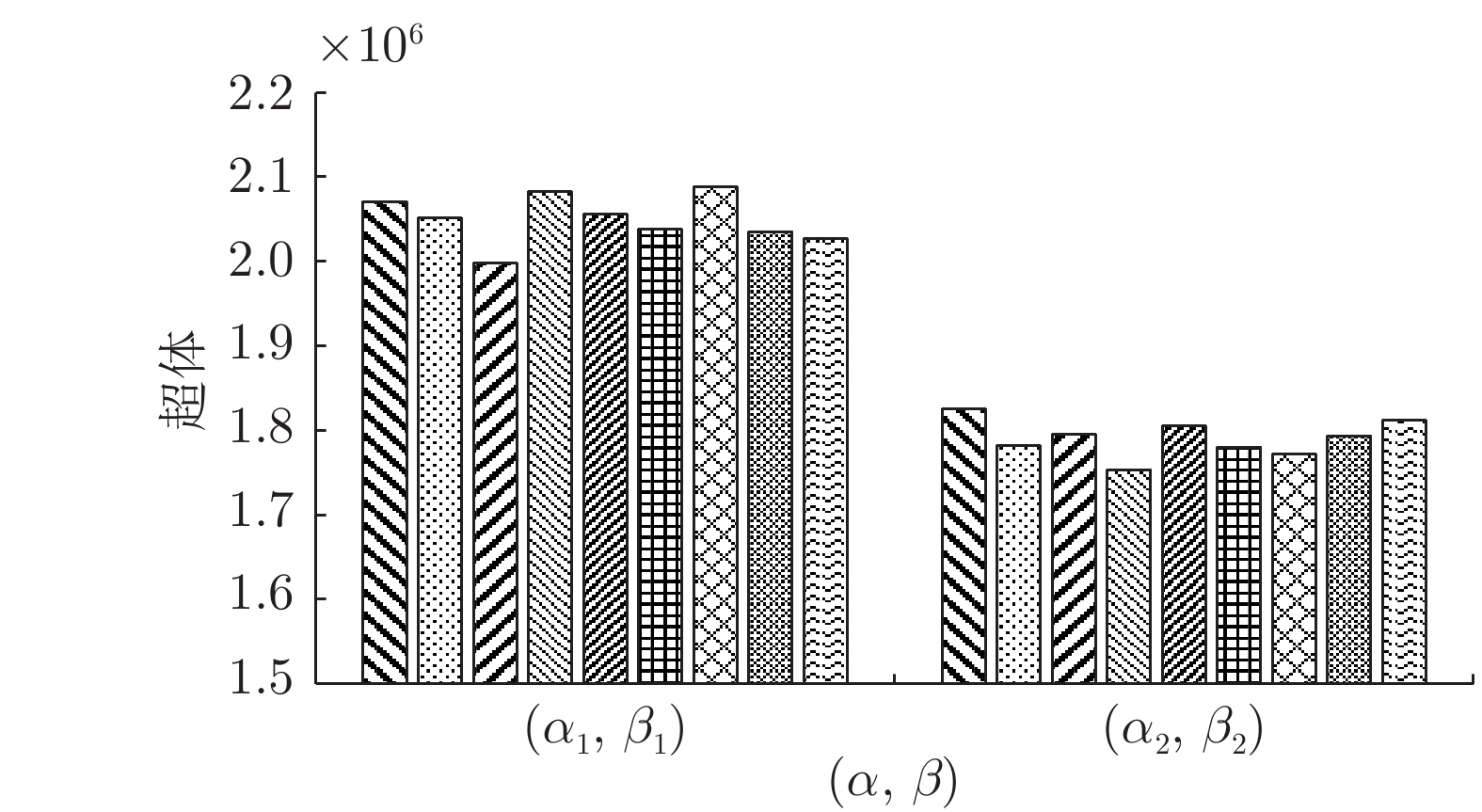
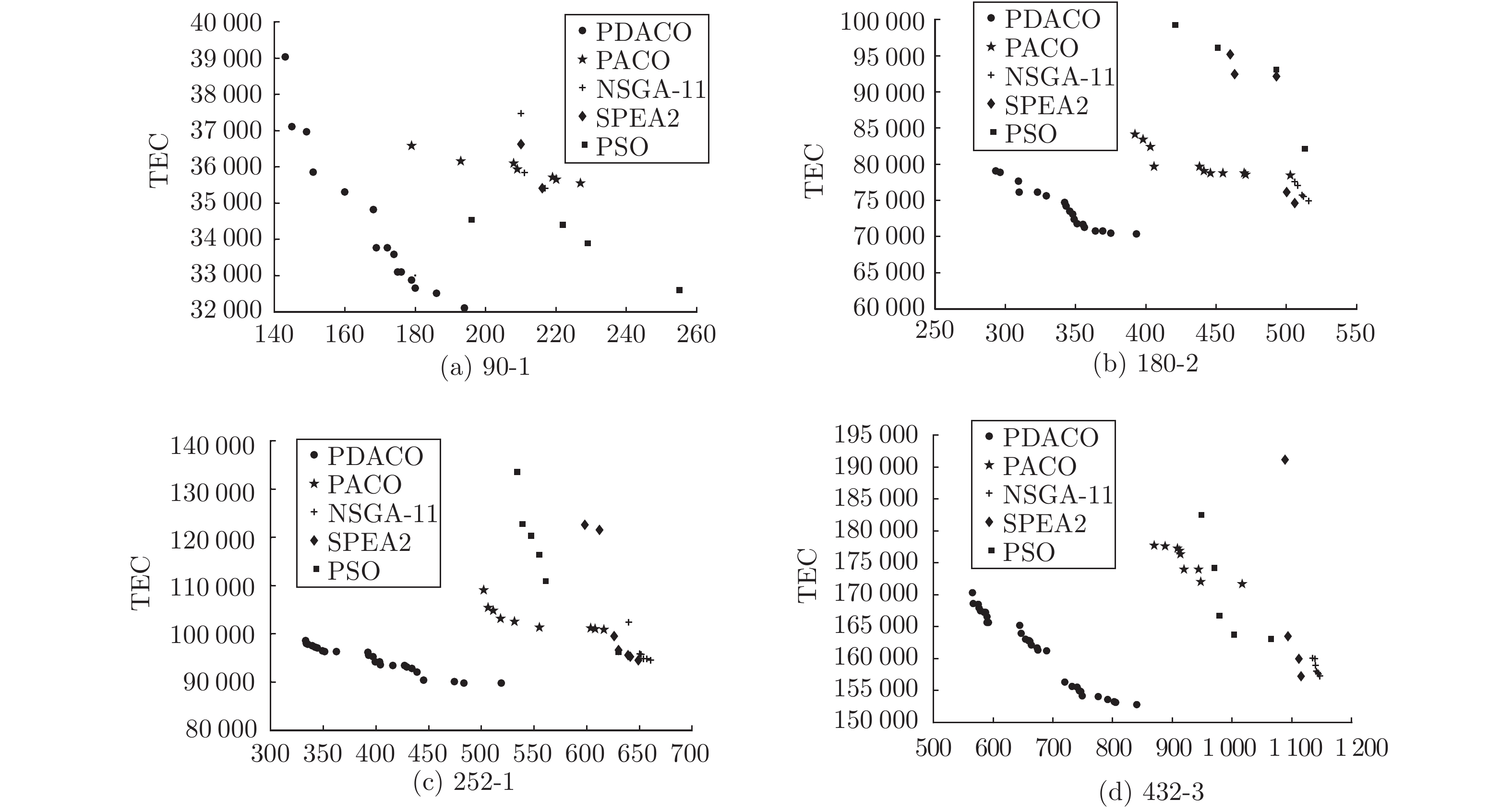
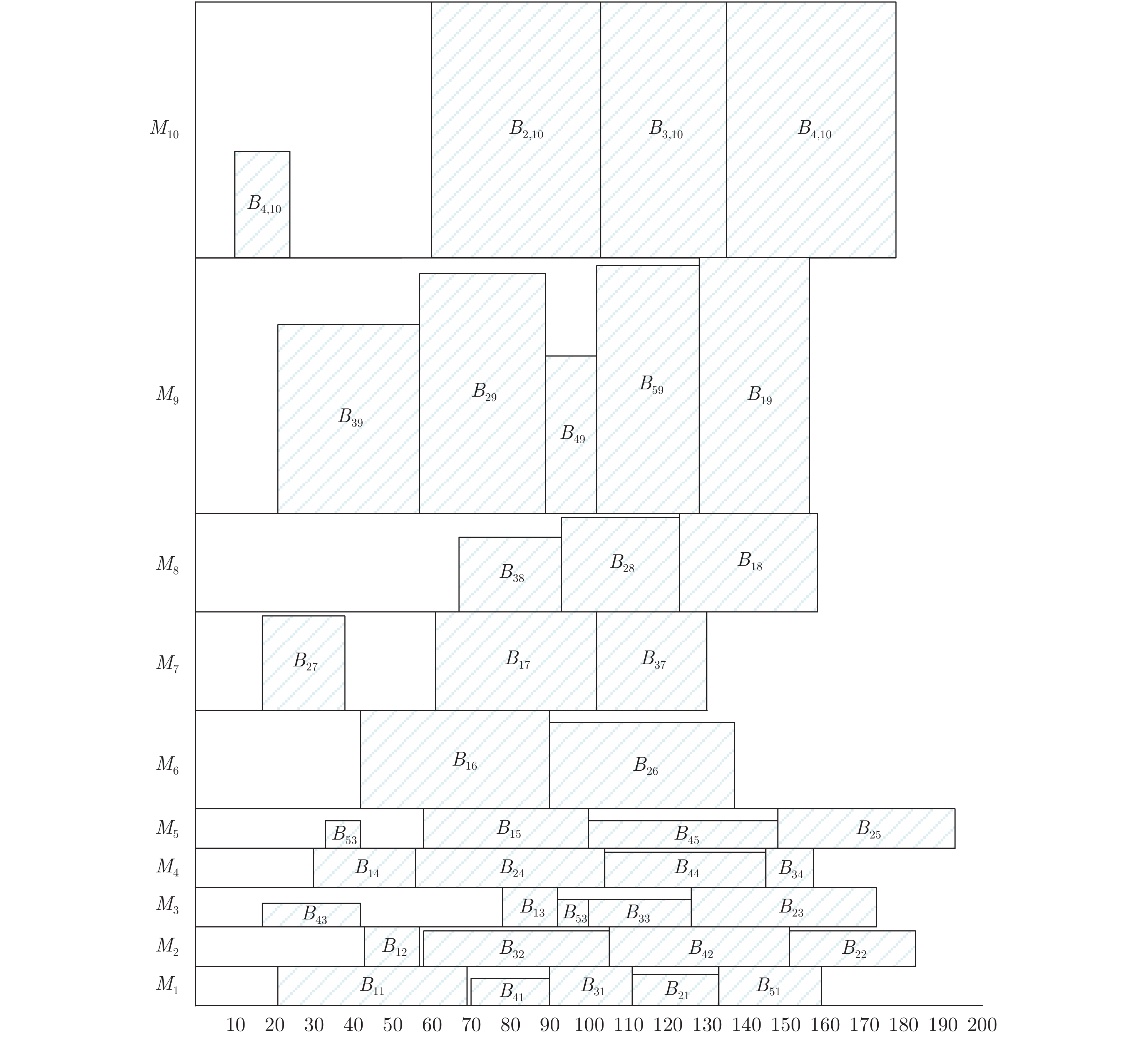
利用用户的偏好信息, 提出一种基于蚁群的双目标协同优化算法(Bi-objective synergy ant colony optimization algorithm based on Pareto domination, PDACO)并用于求解平行批处理机调度问题. 考虑在一组差异容量并带有不同加工功率的平行批处理机器上, 加工带有不同到达时间、尺寸和加工时间的一组工件, 以同时最小化最大完工时间和总能耗. 偏好向量的引入虽然可以提高算法的收敛性, 但会降低解的多样性. 为了弥补这一缺陷, 在本文所提算法中, 利用两个子蚁群分别沿着不同方向, 迭代地进行独立和联合搜索. 最后, 通过大量的仿真实验验证了本文提出算法的有效性.
利用用户的偏好信息, 提出一种基于蚁群的双目标协同优化算法(Bi-objective synergy ant colony optimization algorithm based on Pareto domination, PDACO)并用于求解平行批处理机调度问题. 考虑在一组差异容量并带有不同加工功率的平行批处理机器上, 加工带有不同到达时间、尺寸和加工时间的一组工件, 以同时最小化最大完工时间和总能耗. 偏好向量的引入虽然可以提高算法的收敛性, 但会降低解的多样性. 为了弥补这一缺陷, 在本文所提算法中, 利用两个子蚁群分别沿着不同方向, 迭代地进行独立和联合搜索. 最后, 通过大量的仿真实验验证了本文提出算法的有效性.



2020, 46(6): 1136-1144.
doi: 10.16383/j.aas.c180712
cstr: 32138.14.j.aas.c180712
摘要:
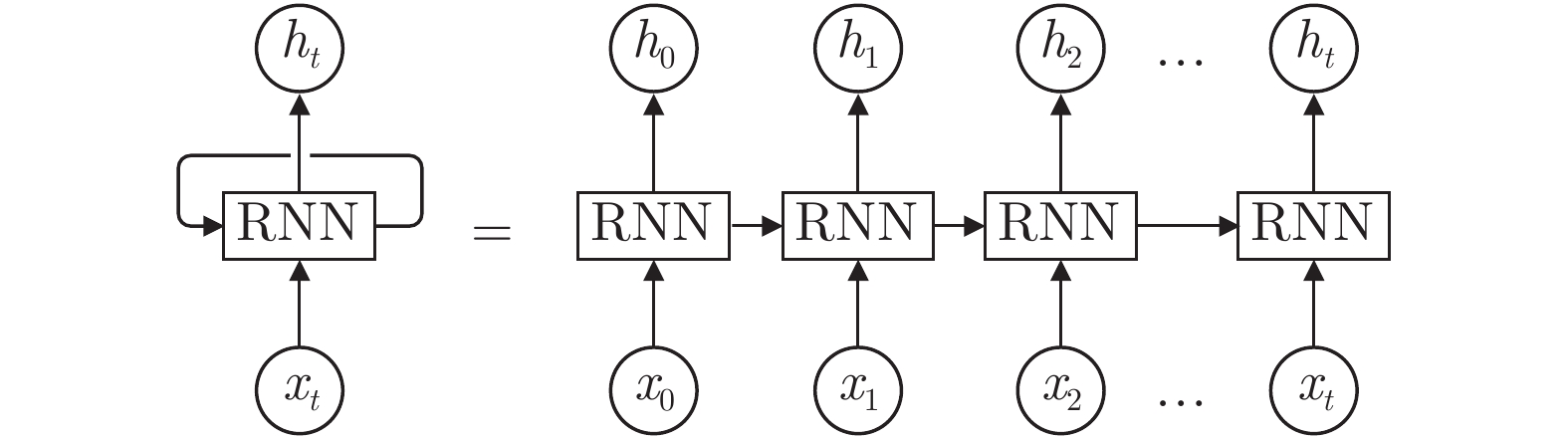
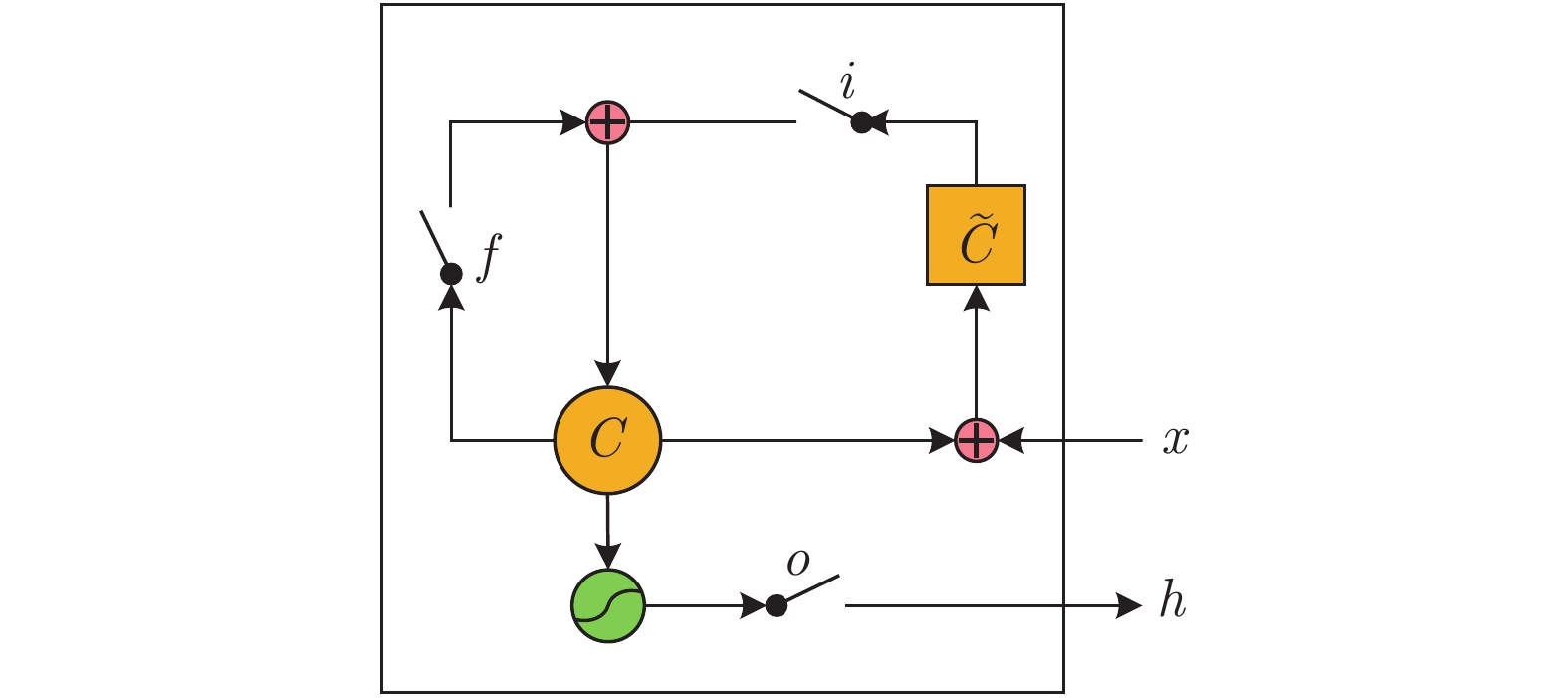
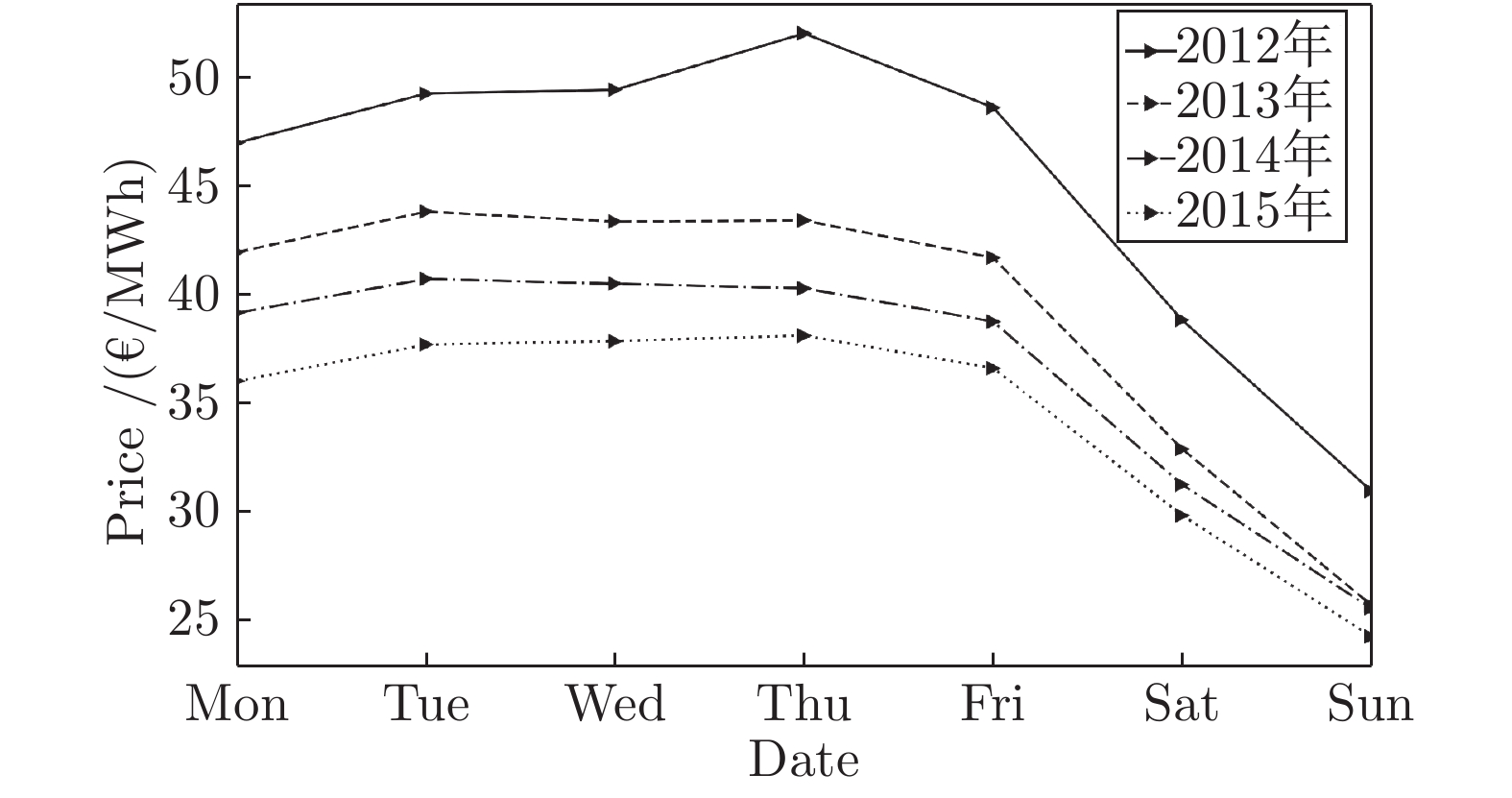
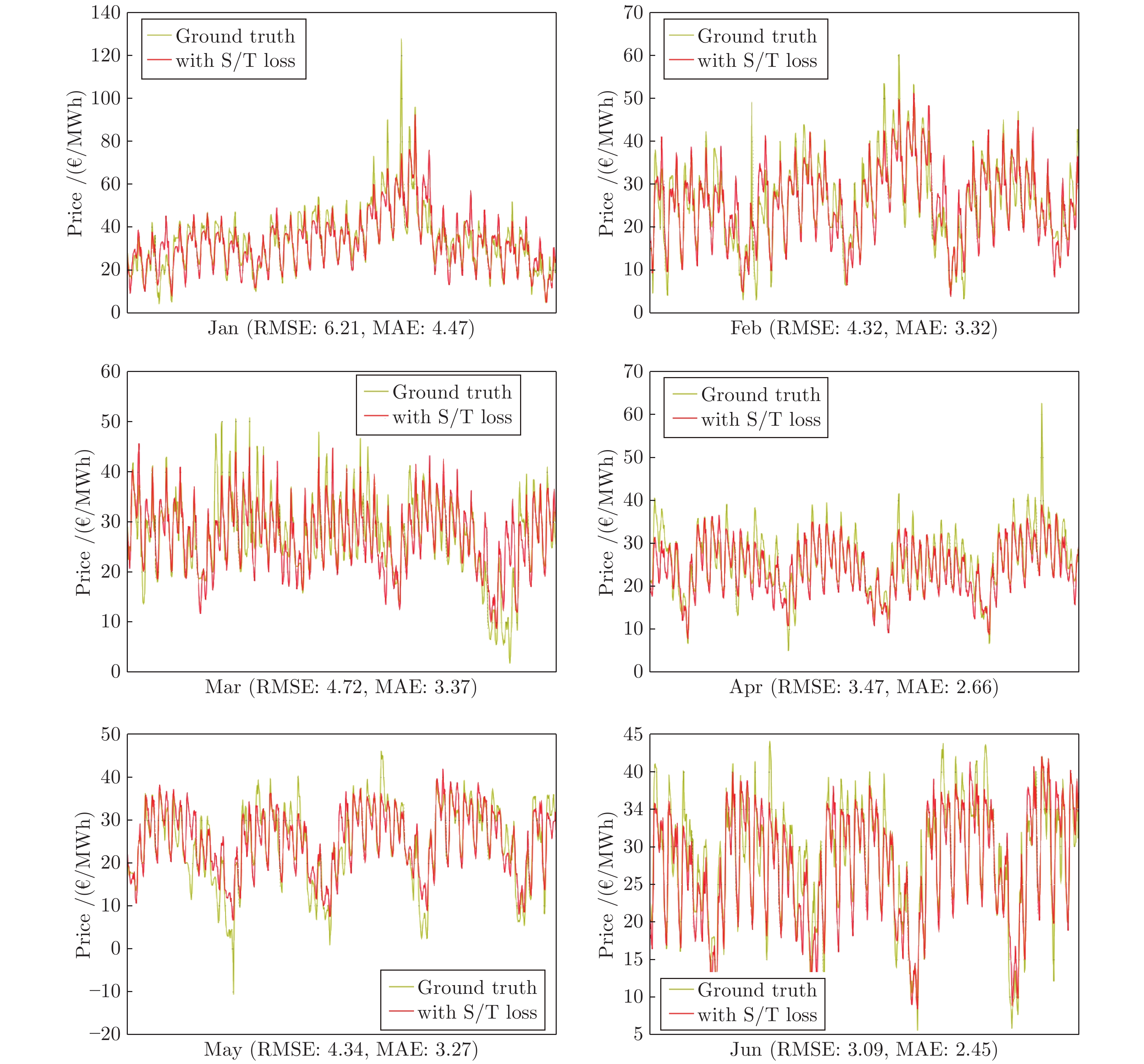
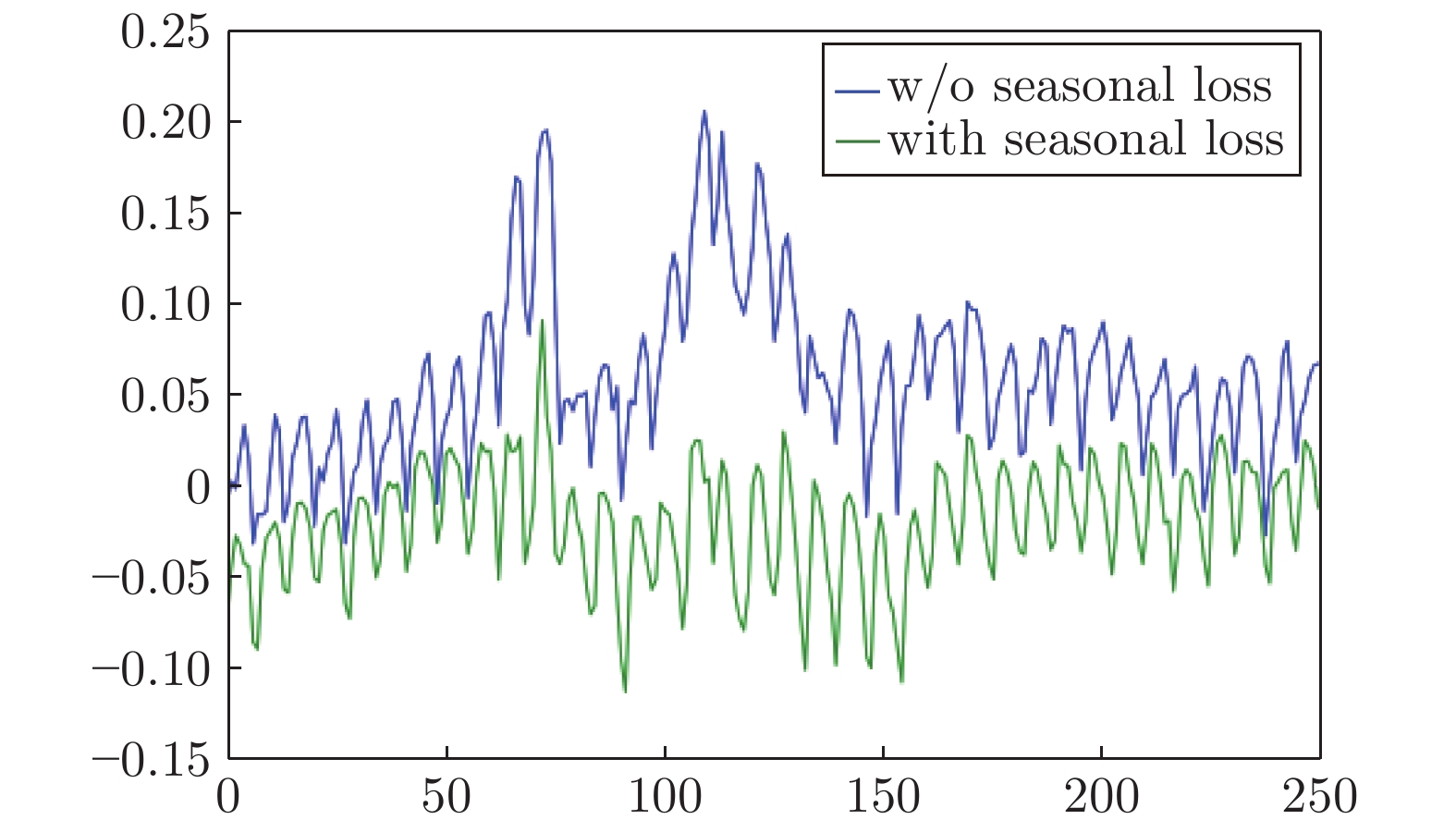
时间序列数据广泛存在于人类的生产生活中, 通常具有复杂的非线性动态和一定的周期性. 与传统的时间序列分析方法相比, 基于深度学习的方法更能捕捉数据的深层特性, 对具有复杂非线性的时间序列有较好的建模效果. 为了在神经网络中显式地建模时间序列数据的周期性和趋势性, 本文在循环神经网络的基础上引入了周期损失和趋势损失, 建立了基于周期性建模和多任务学习的时间序列预测模型. 将模型应用到欧洲能源交易所法国市场的能源市场价格预测中, 结果表明周期损失和趋势损失能够提高神经网络的泛化能力, 并提高预测时间序列趋势的精度.
时间序列数据广泛存在于人类的生产生活中, 通常具有复杂的非线性动态和一定的周期性. 与传统的时间序列分析方法相比, 基于深度学习的方法更能捕捉数据的深层特性, 对具有复杂非线性的时间序列有较好的建模效果. 为了在神经网络中显式地建模时间序列数据的周期性和趋势性, 本文在循环神经网络的基础上引入了周期损失和趋势损失, 建立了基于周期性建模和多任务学习的时间序列预测模型. 将模型应用到欧洲能源交易所法国市场的能源市场价格预测中, 结果表明周期损失和趋势损失能够提高神经网络的泛化能力, 并提高预测时间序列趋势的精度.



2020, 46(6): 1145-1153.
doi: 10.16383/j.aas.c190146
cstr: 32138.14.j.aas.c190146
摘要:
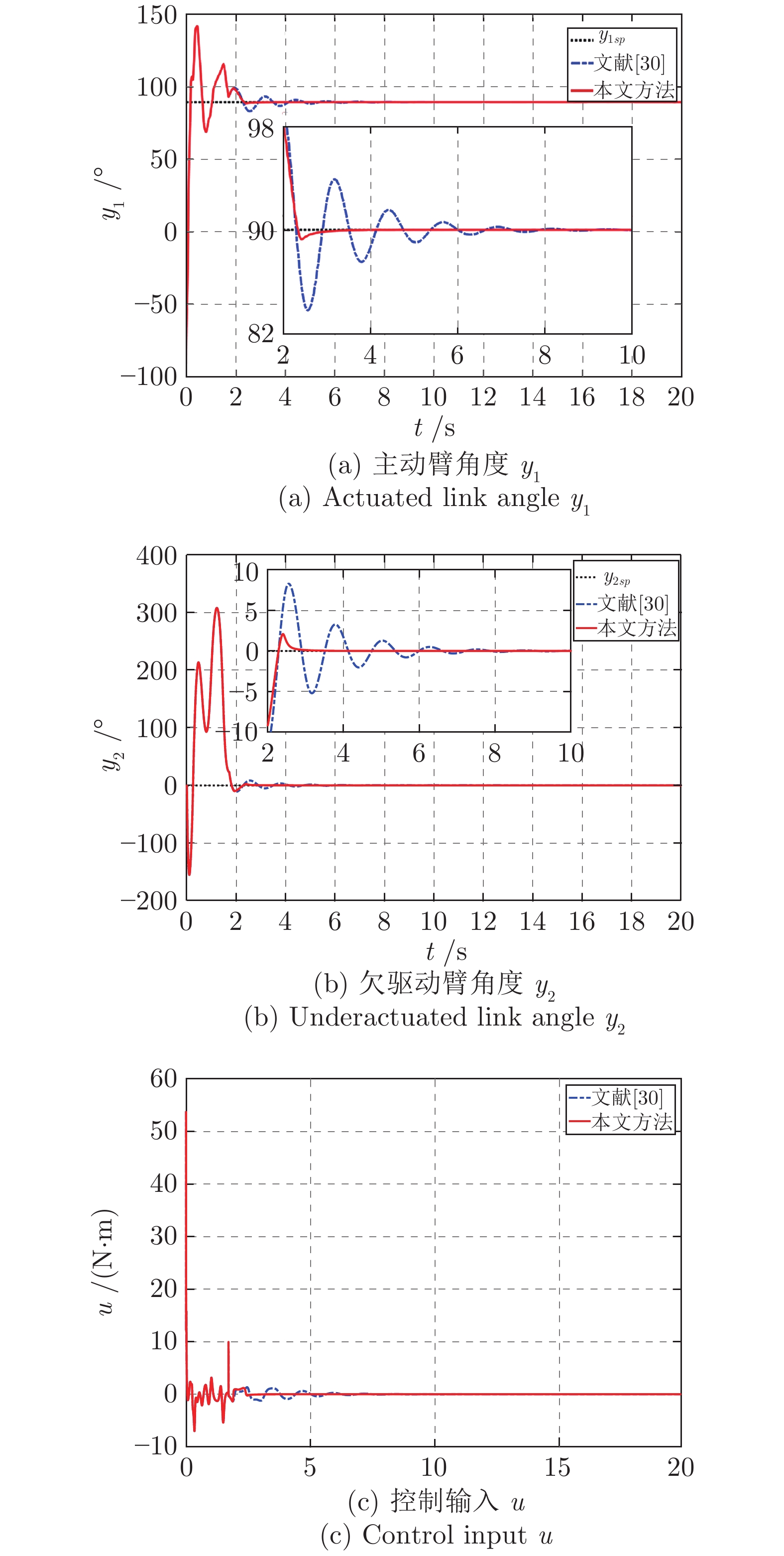
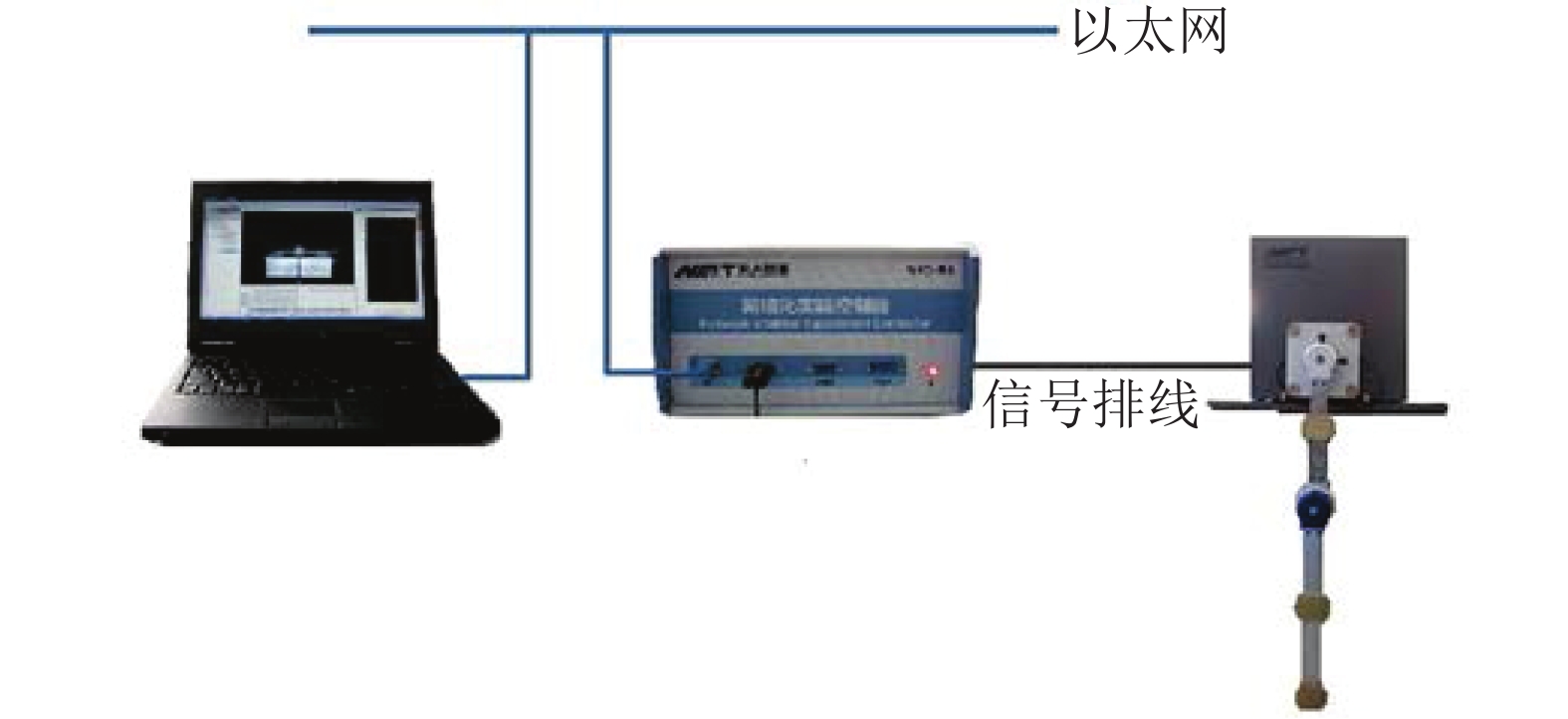
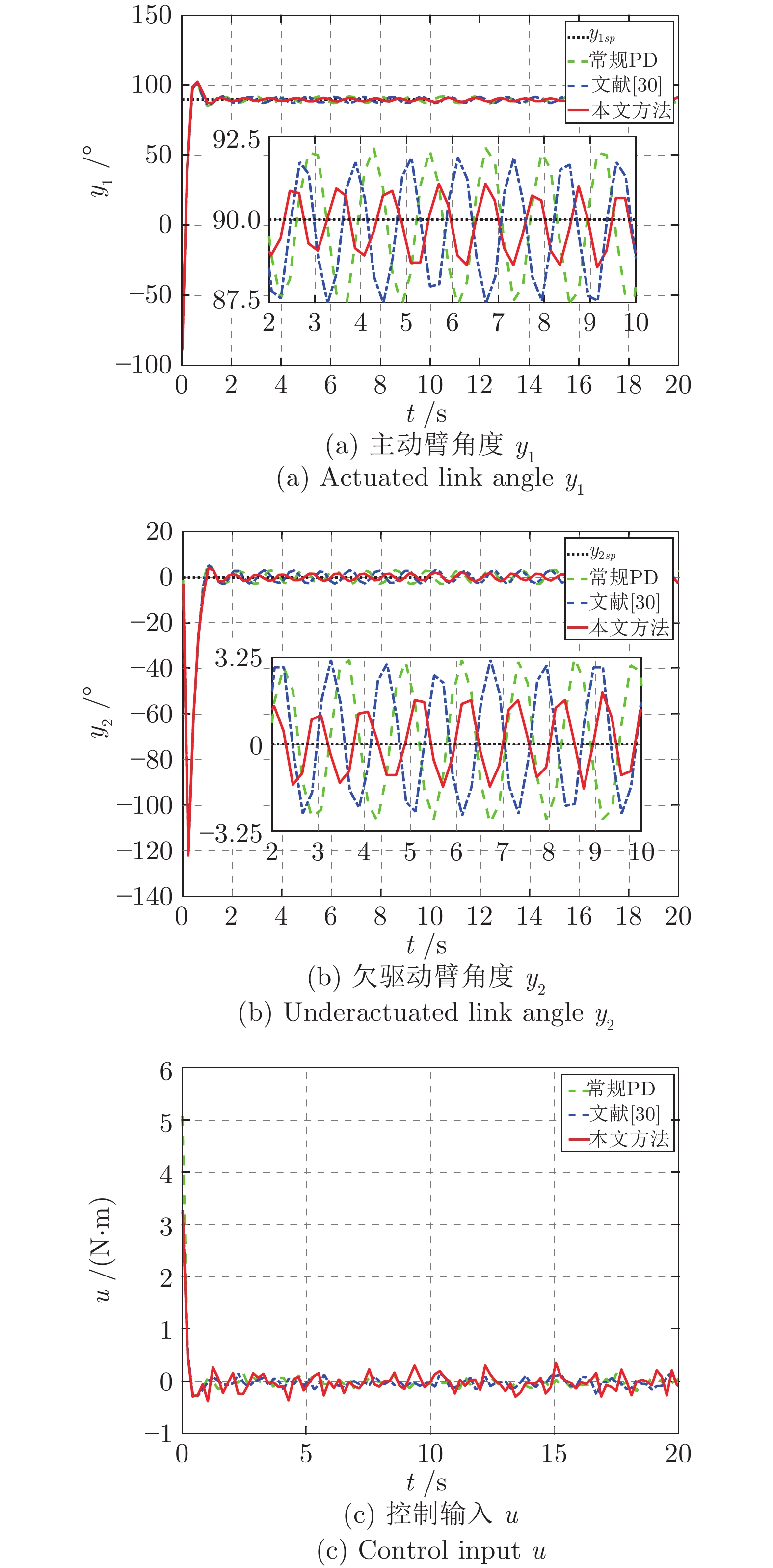
针对一类具有强非线性、机理不清且动态特性随不同运行条件而变化的复杂过程, 将基于数据的建模技术与基于模型的控制策略相结合, 提出了未建模动态及其未知增量补偿驱动的非线性PID控制方法. 所提的算法将一步超前最优控制策略应用于PID控制器的参数设计, 并结合非线性补偿技术进行综合设计, 从理论上给出了PID控制器参数以及非线性补偿器设计的一般原则和方法, 为解决传统PID控制器参数难于整定的问题提供了方法和途径. 在此基础上, 分析了闭环系统的稳定性和收敛性. 最后, 将所提的控制算法进行数值仿真实验以及Pendubot系统平衡控制的对比实验, 实验结果表明, 在Pendubot的精确摩擦力模型未知的情况下, 所提算法能有效地消除系统未知时变不确定性的影响, 并尽可能地减少Pendubot摆角的波动, 将摆角控制在规定的目标值范围内.
针对一类具有强非线性、机理不清且动态特性随不同运行条件而变化的复杂过程, 将基于数据的建模技术与基于模型的控制策略相结合, 提出了未建模动态及其未知增量补偿驱动的非线性PID控制方法. 所提的算法将一步超前最优控制策略应用于PID控制器的参数设计, 并结合非线性补偿技术进行综合设计, 从理论上给出了PID控制器参数以及非线性补偿器设计的一般原则和方法, 为解决传统PID控制器参数难于整定的问题提供了方法和途径. 在此基础上, 分析了闭环系统的稳定性和收敛性. 最后, 将所提的控制算法进行数值仿真实验以及Pendubot系统平衡控制的对比实验, 实验结果表明, 在Pendubot的精确摩擦力模型未知的情况下, 所提算法能有效地消除系统未知时变不确定性的影响, 并尽可能地减少Pendubot摆角的波动, 将摆角控制在规定的目标值范围内.
2020, 46(6): 1154-1165.
doi: 10.16383/j.aas.c190115
cstr: 32138.14.j.aas.c190115
摘要:
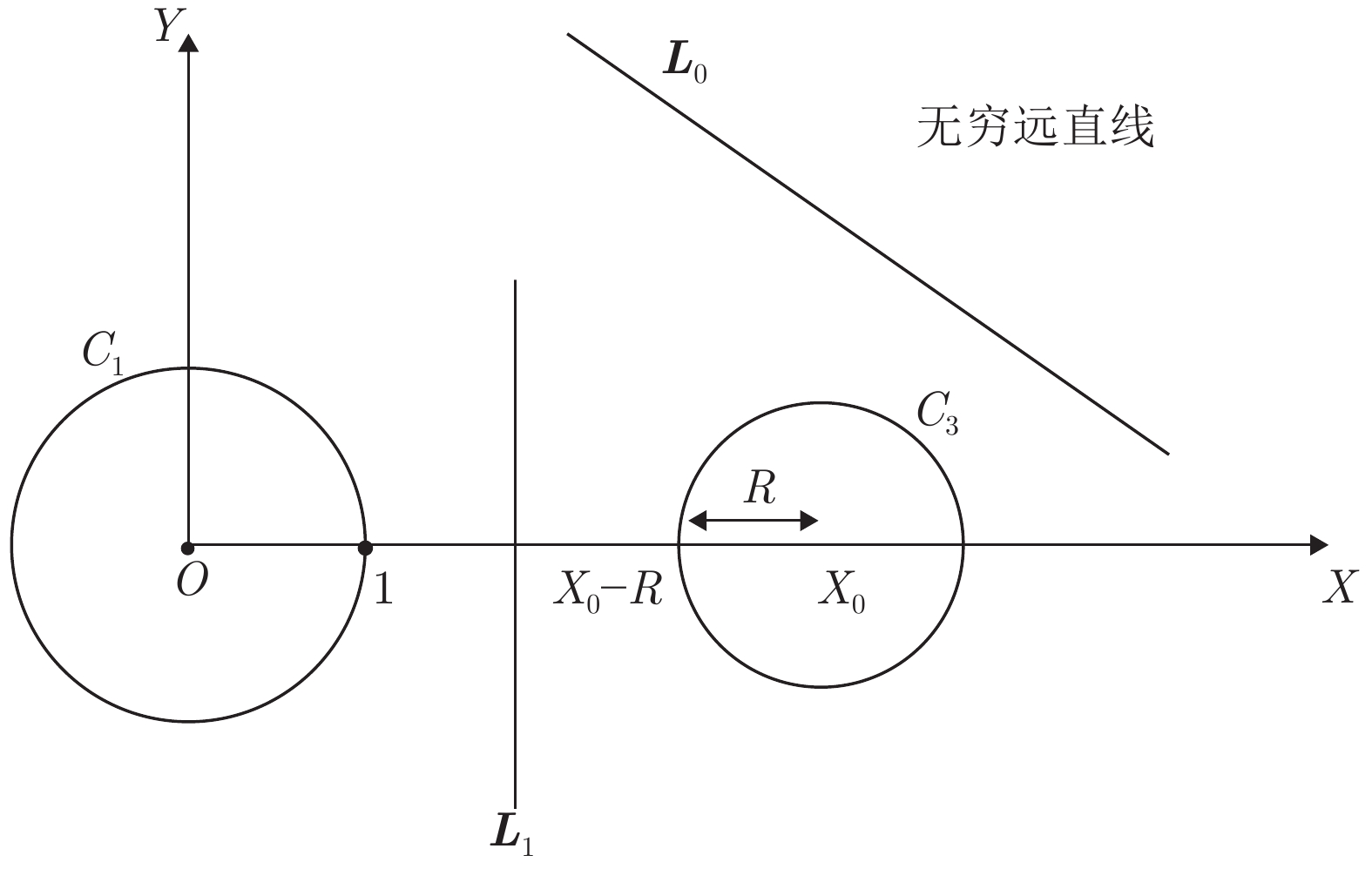
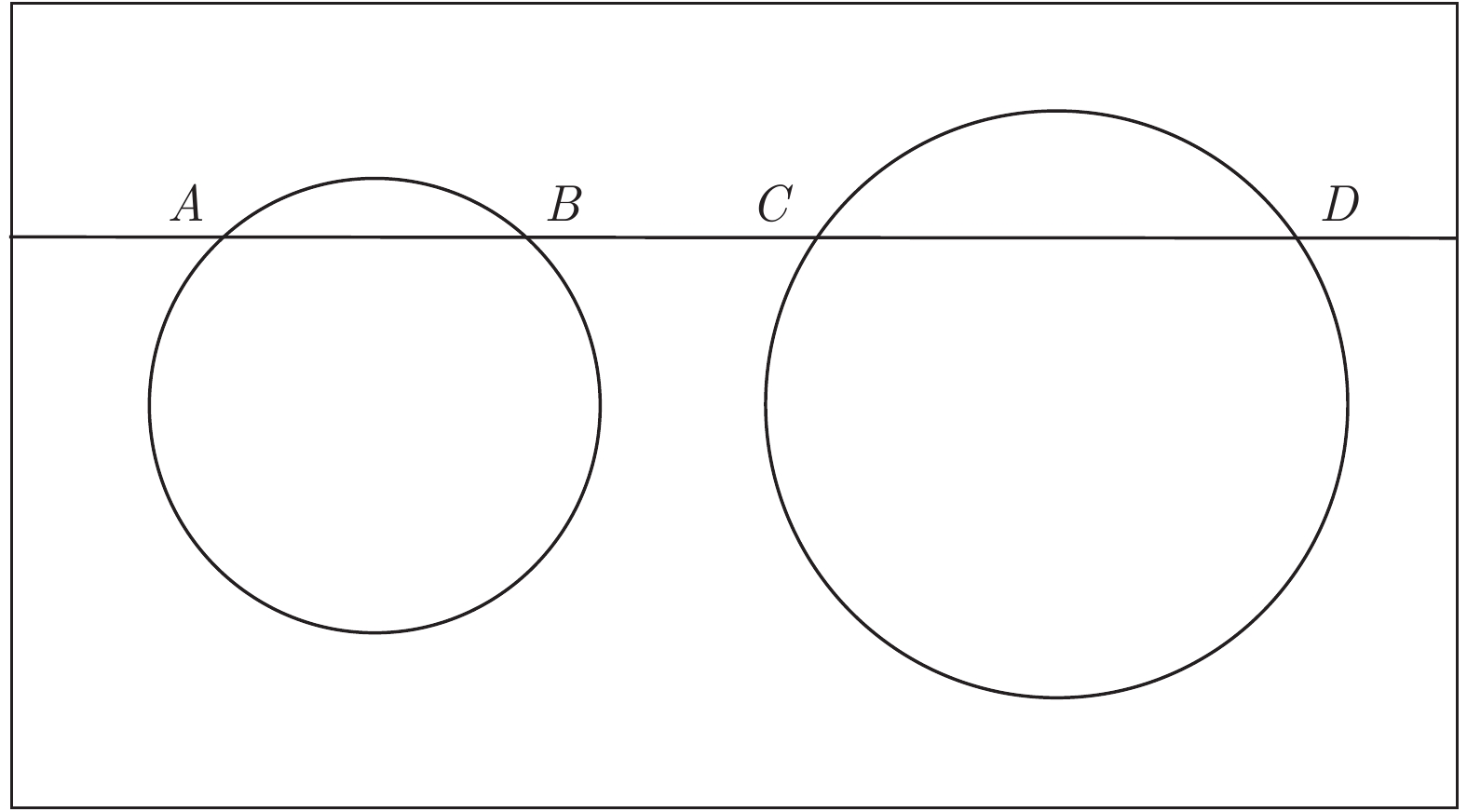
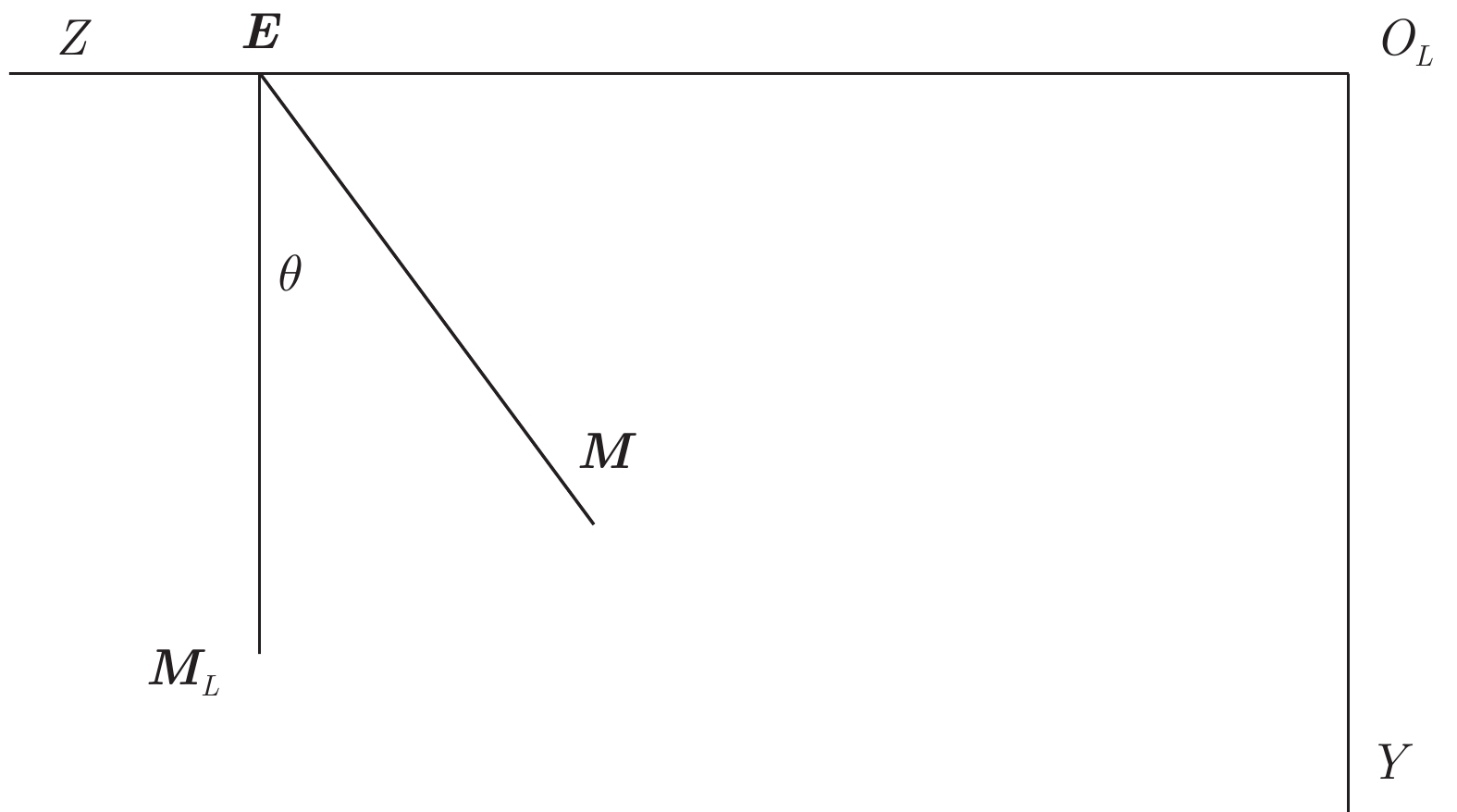
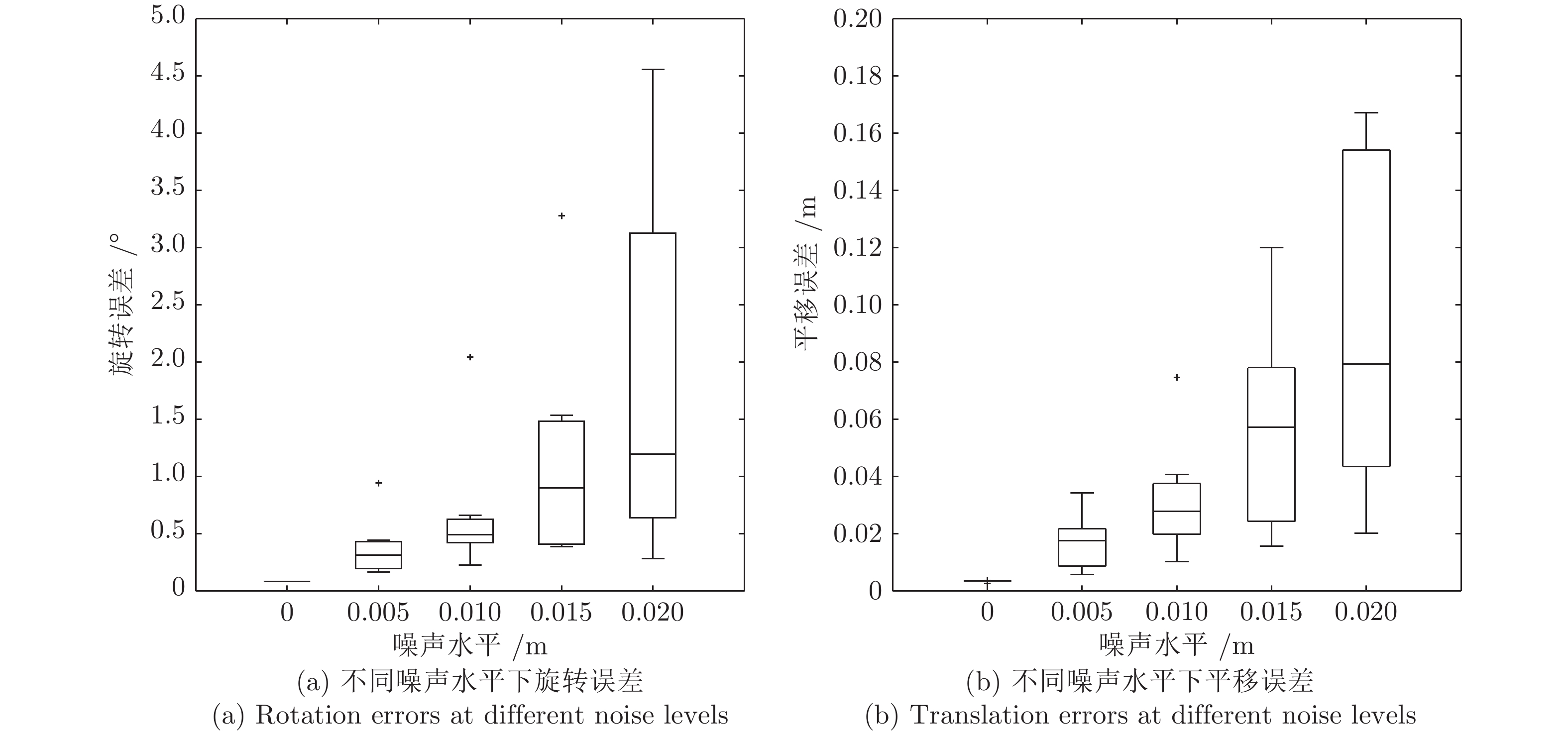
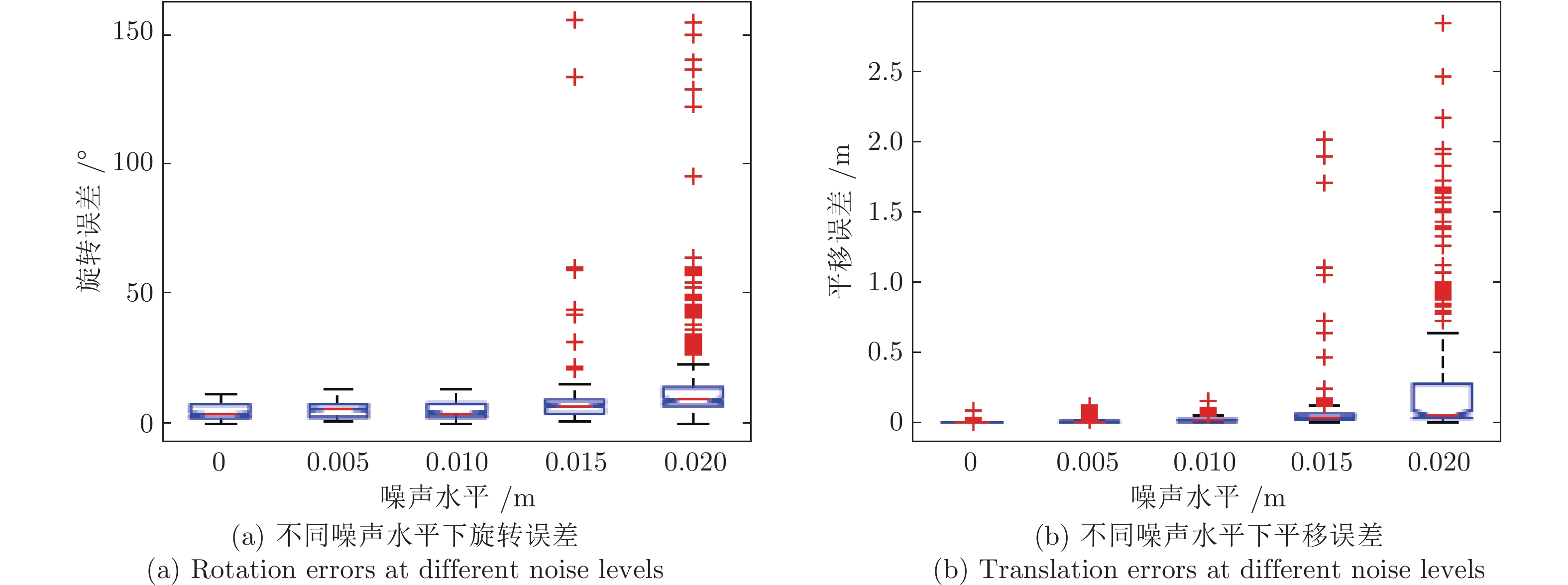
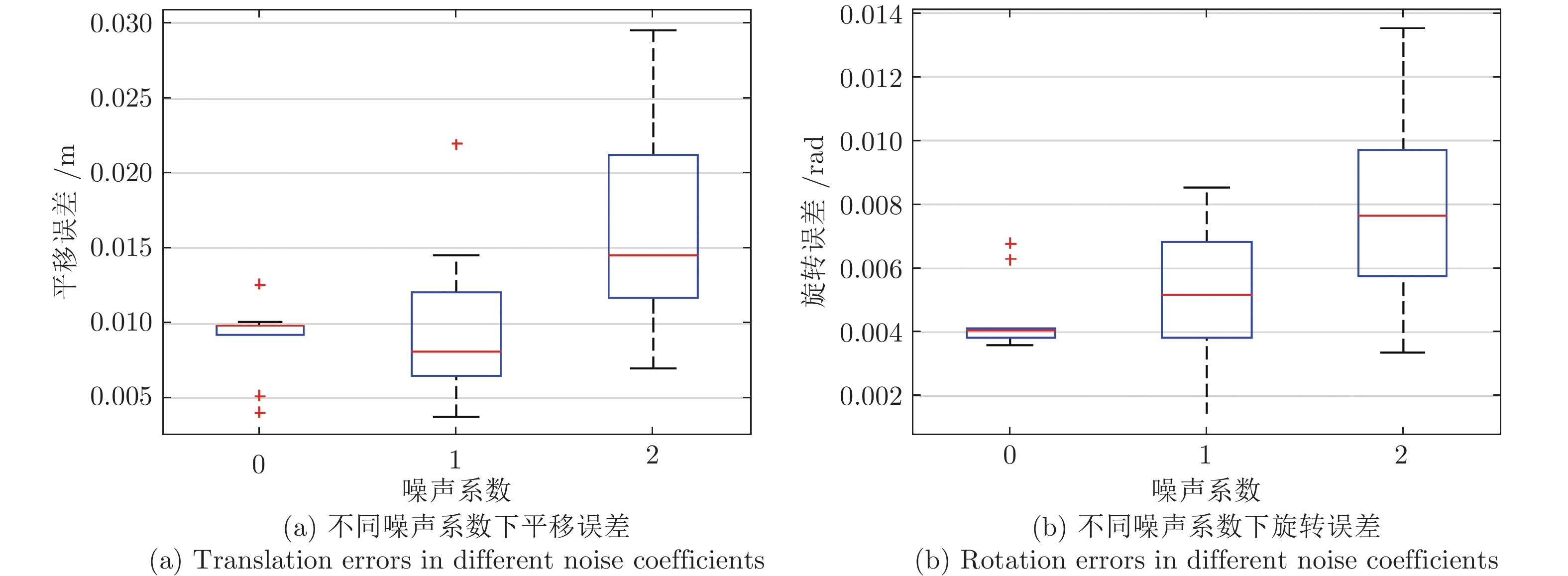
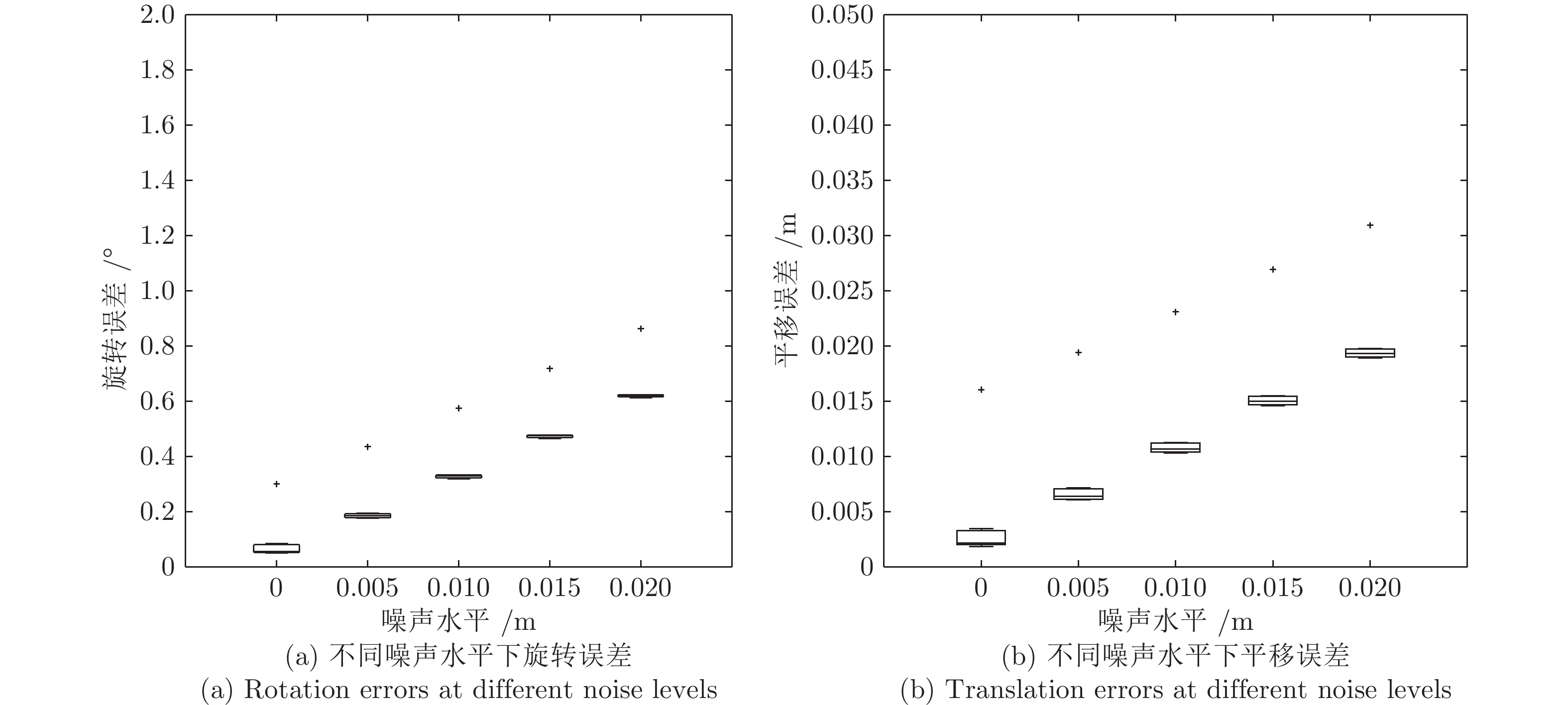
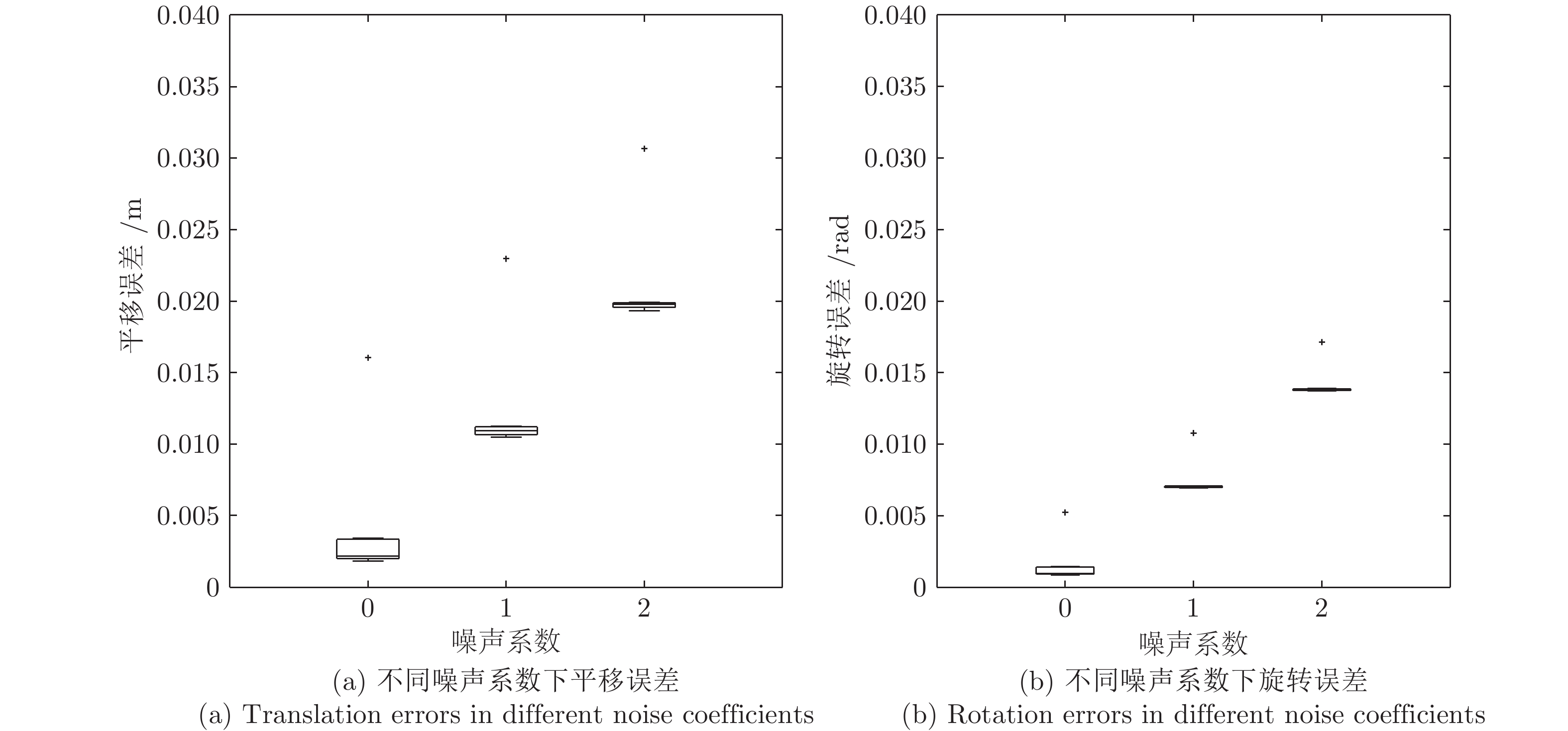
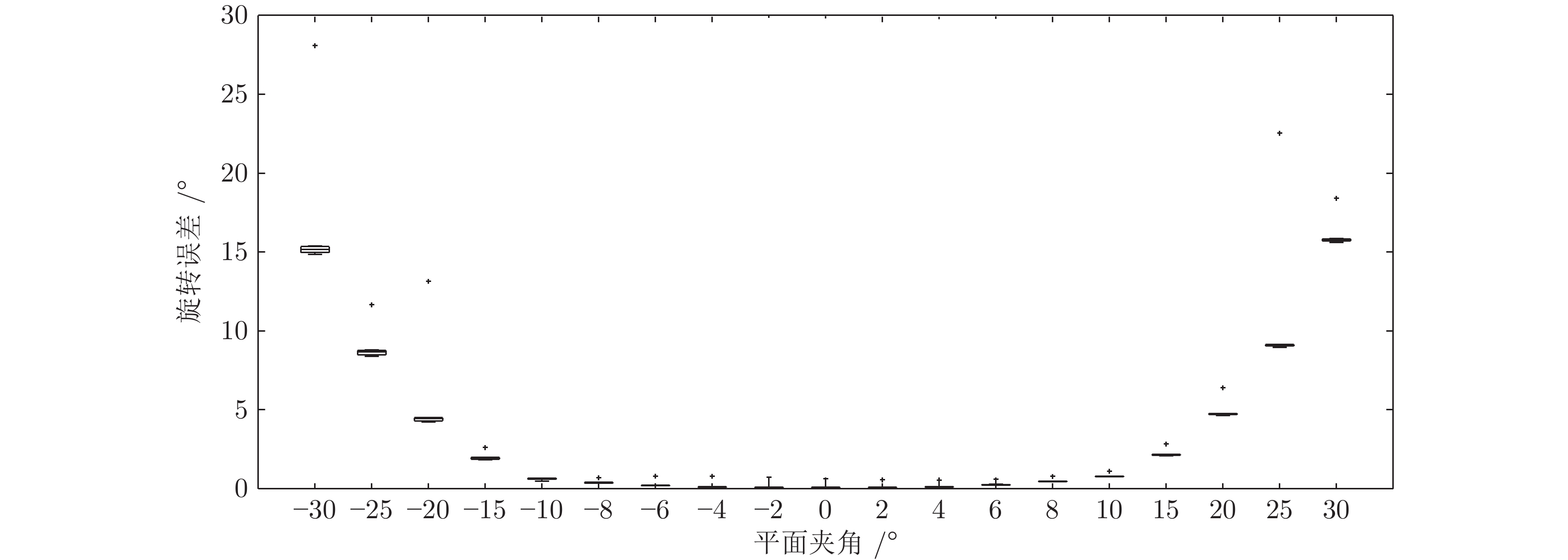
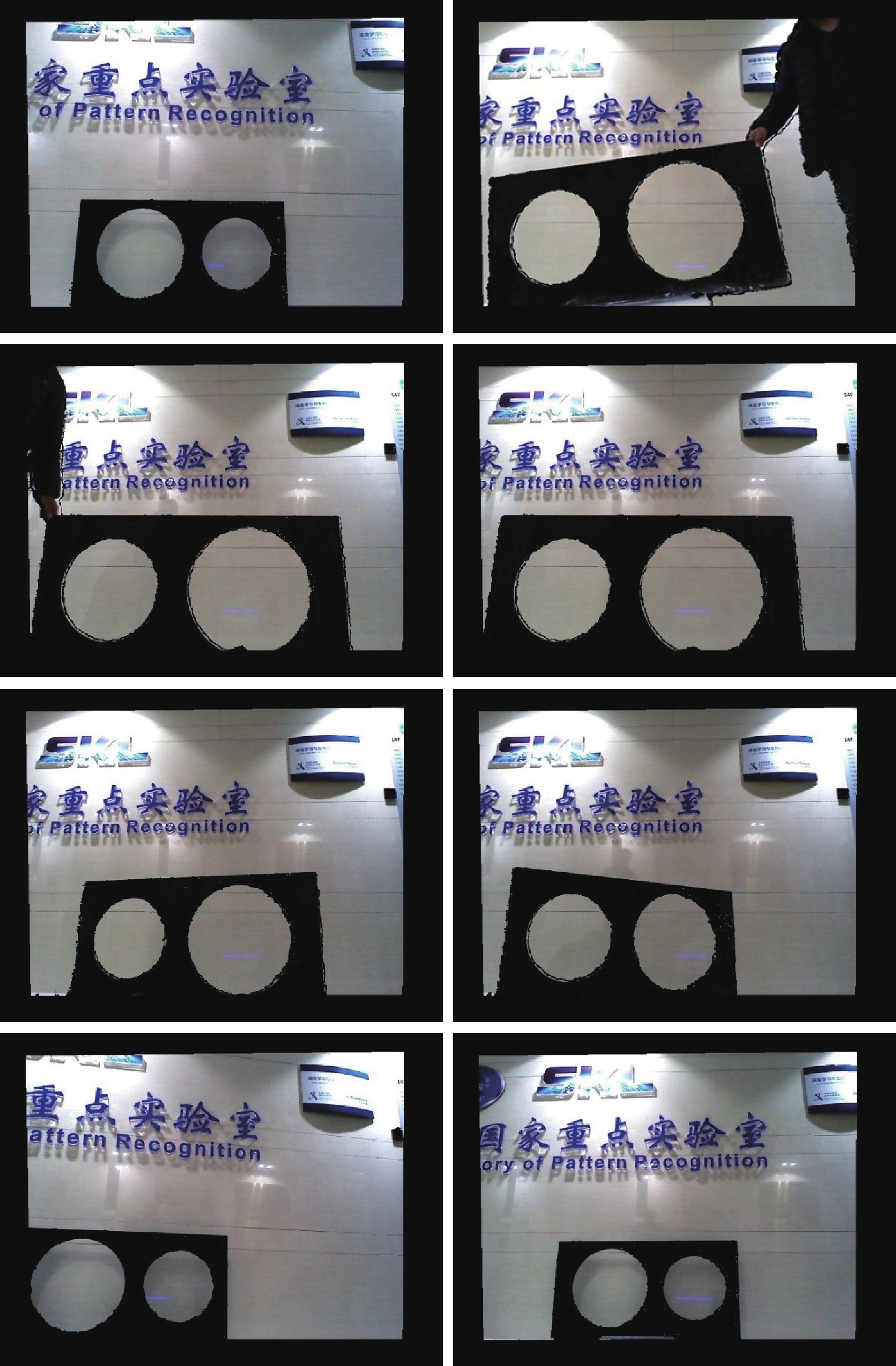
近年来, 距离传感器与摄像机的组合系统标定在无人车环境感知中得到了广泛的研究与应用, 其中基于平面特征的方法简单易行而被广泛采用. 然而, 目前多数方法基于点匹配进行, 易错且鲁棒性较低. 本文提出了一种基于共面圆的距离传感器与相机的组合系统相对位姿估计方法. 该方法使用含有两个共面圆的标定板, 可以获取相机与标定板间的位姿, 以及距离传感器与标定板间的位姿. 此外, 移动标定板获取多组数据, 根据计算得到两个共面圆的圆心在距离传感器和相机下的坐标, 优化重投影误差与3D对应点之间的误差, 得到距离传感器与相机之间的位姿关系. 该方法不需要进行特征点的匹配, 利用射影不变性来获取相机与三维距离传感器的位姿. 仿真实验与真实数据实验结果表明, 本方法对噪声有较强的鲁棒性, 得到了精确的结果.
近年来, 距离传感器与摄像机的组合系统标定在无人车环境感知中得到了广泛的研究与应用, 其中基于平面特征的方法简单易行而被广泛采用. 然而, 目前多数方法基于点匹配进行, 易错且鲁棒性较低. 本文提出了一种基于共面圆的距离传感器与相机的组合系统相对位姿估计方法. 该方法使用含有两个共面圆的标定板, 可以获取相机与标定板间的位姿, 以及距离传感器与标定板间的位姿. 此外, 移动标定板获取多组数据, 根据计算得到两个共面圆的圆心在距离传感器和相机下的坐标, 优化重投影误差与3D对应点之间的误差, 得到距离传感器与相机之间的位姿关系. 该方法不需要进行特征点的匹配, 利用射影不变性来获取相机与三维距离传感器的位姿. 仿真实验与真实数据实验结果表明, 本方法对噪声有较强的鲁棒性, 得到了精确的结果.




2020, 46(6): 1166-1177.
doi: 10.16383/j.aas.c190365
cstr: 32138.14.j.aas.c190365
摘要:
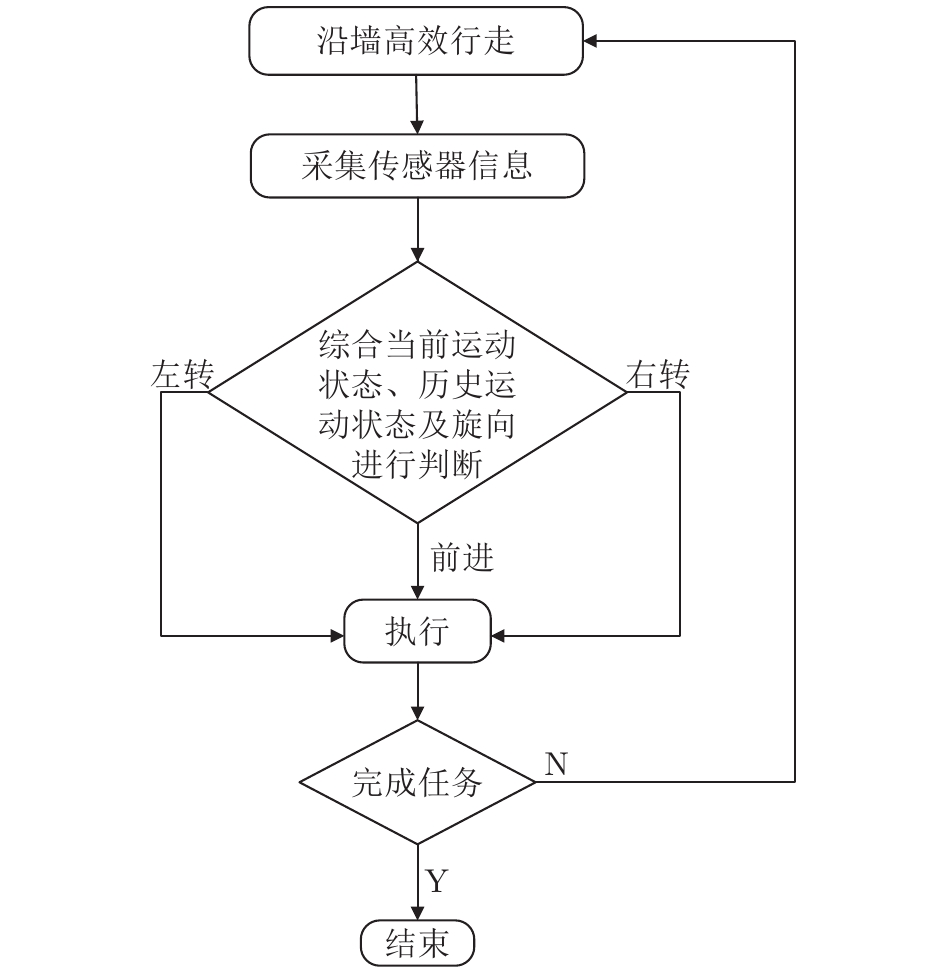
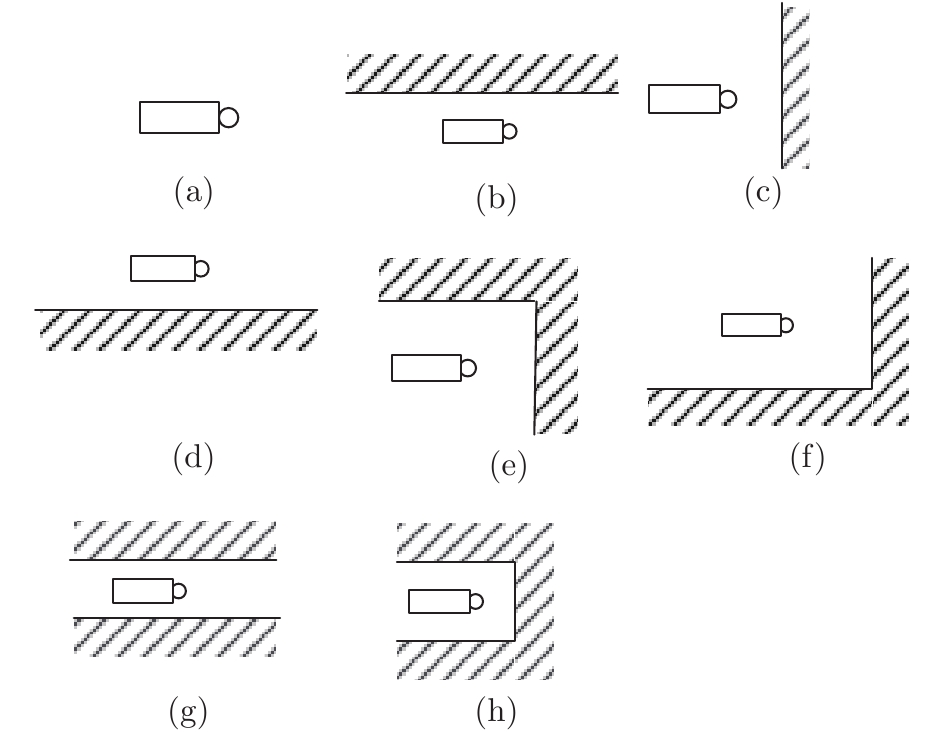
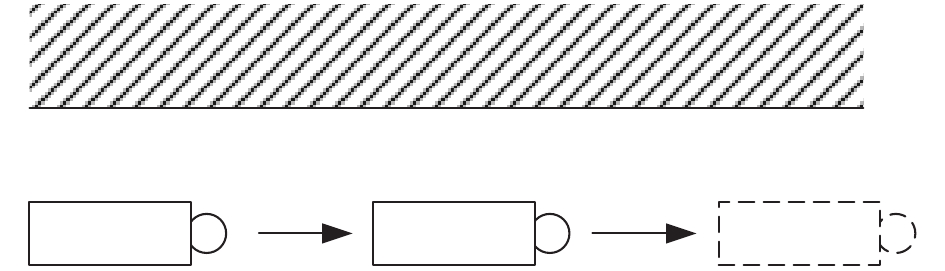
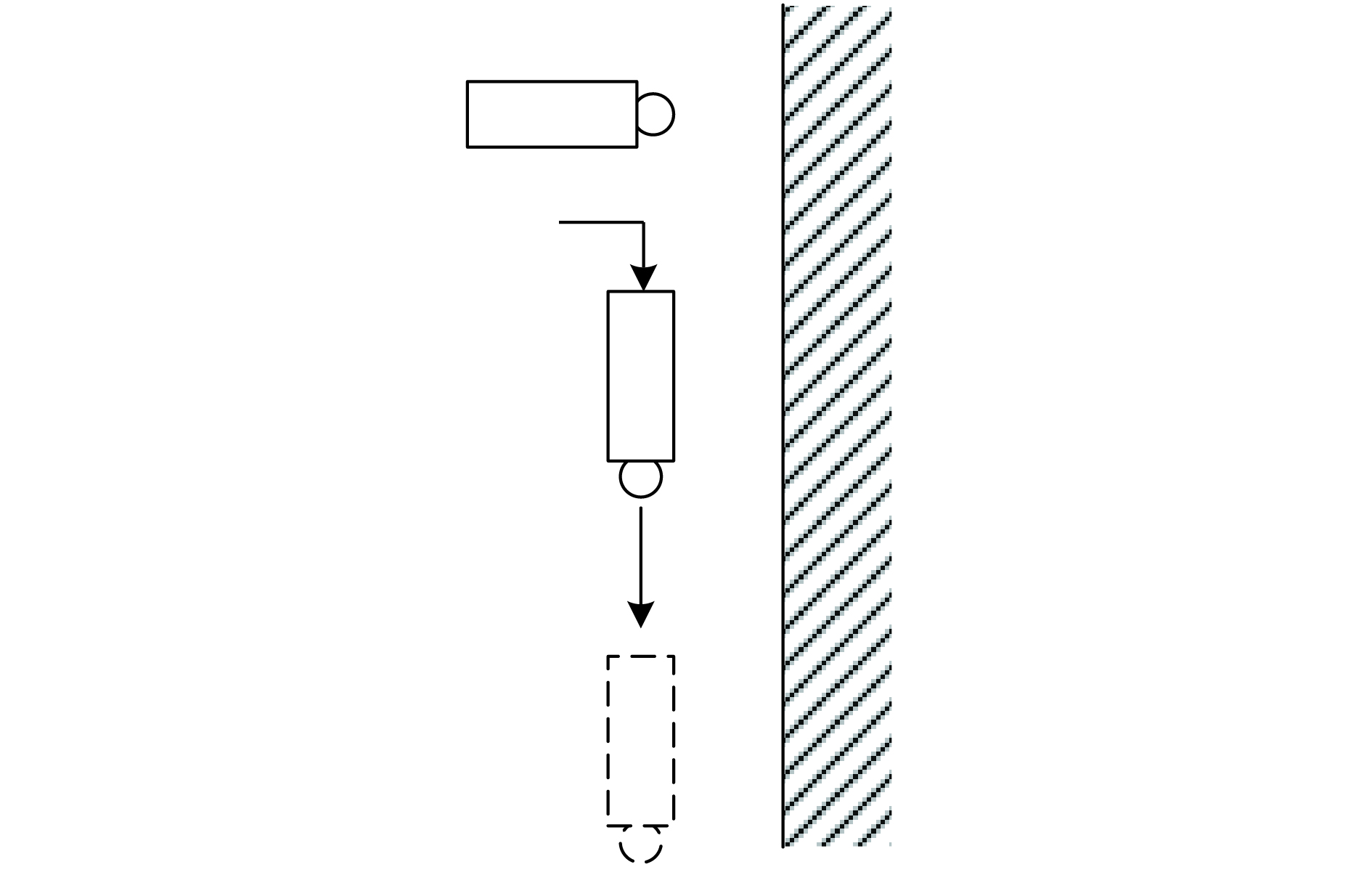
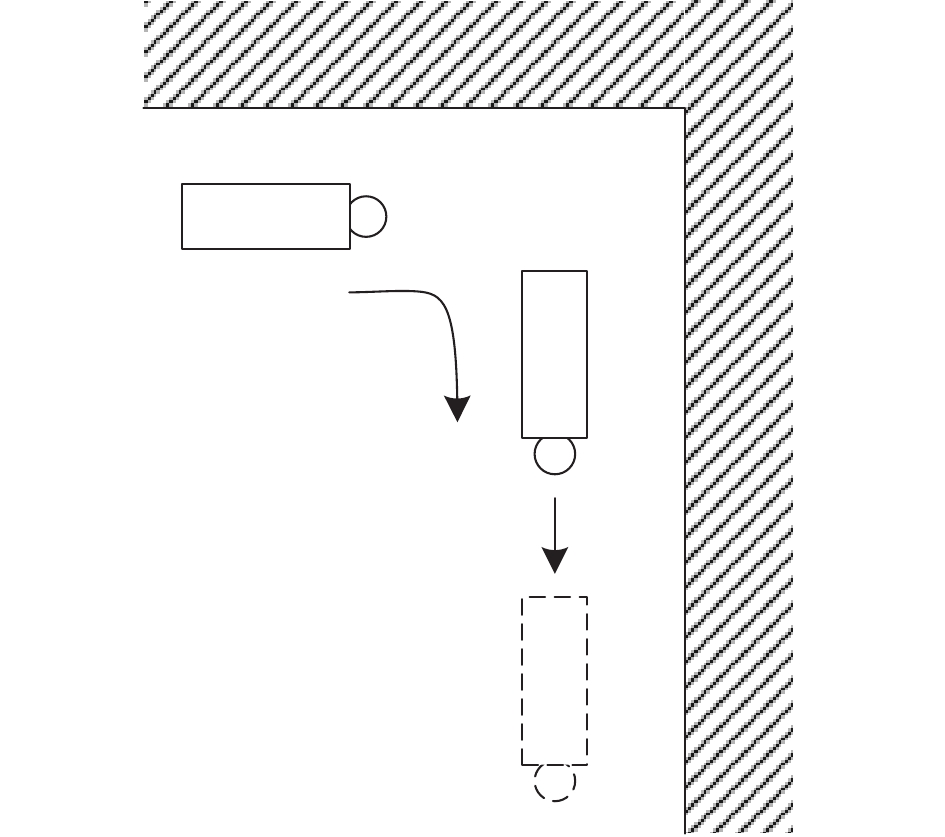
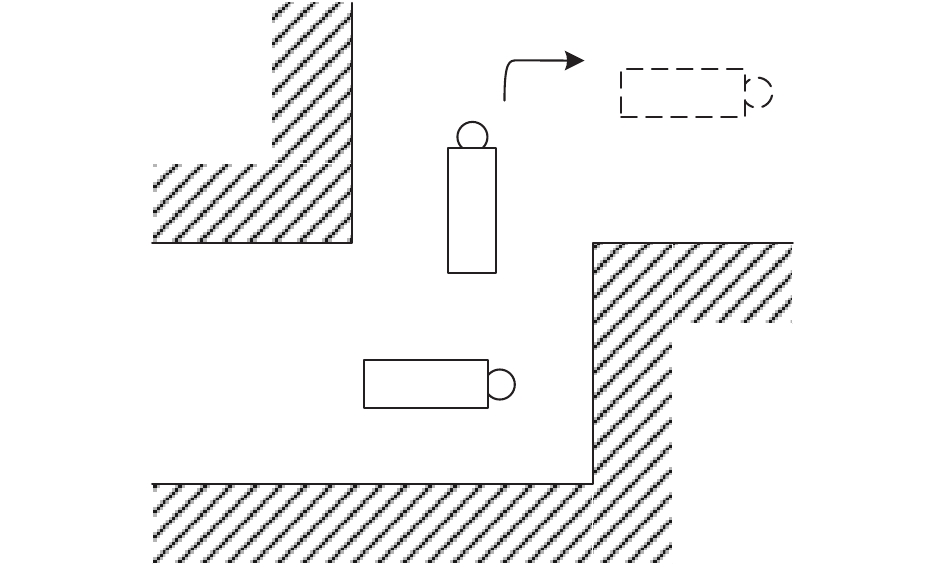
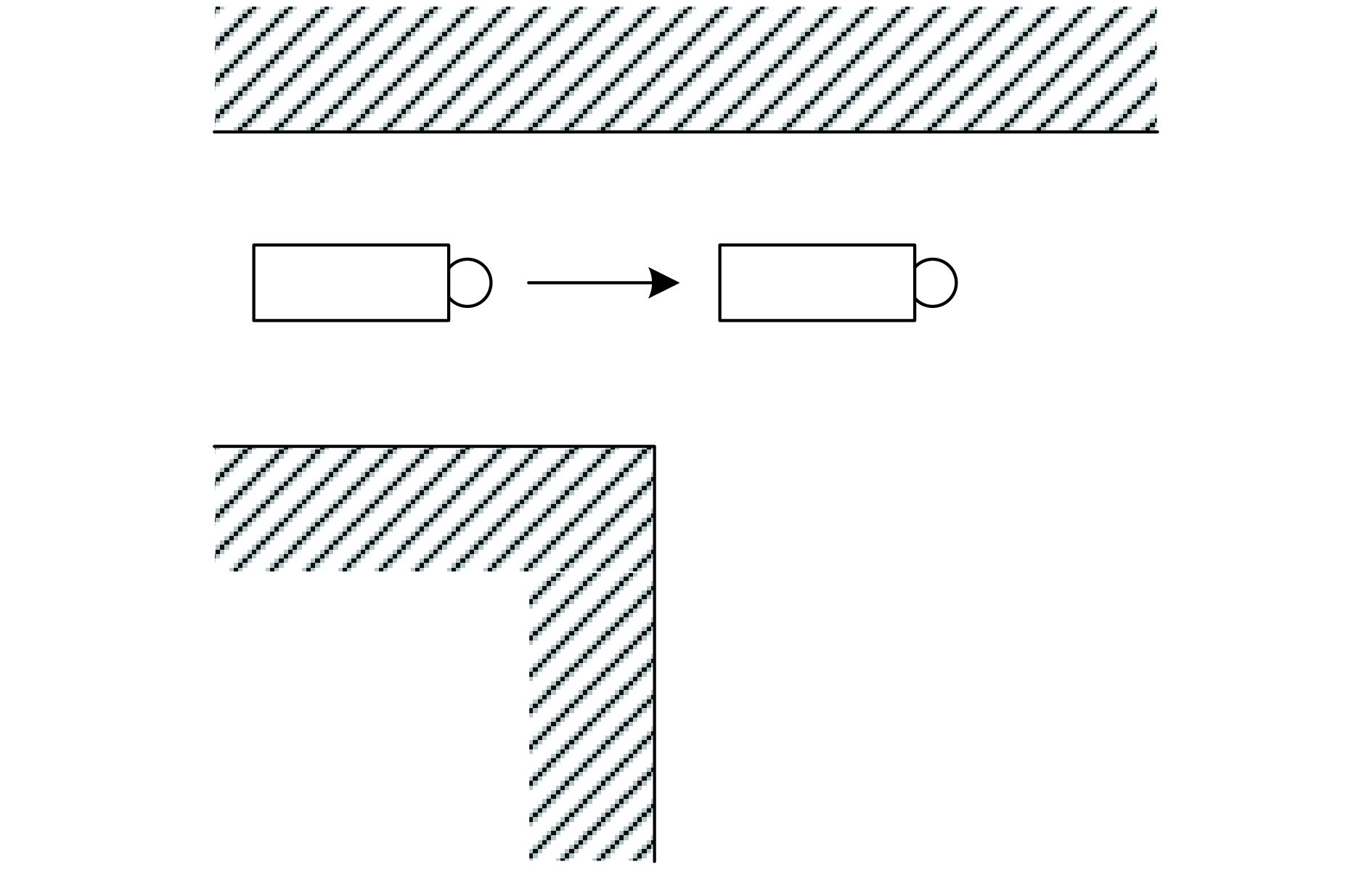
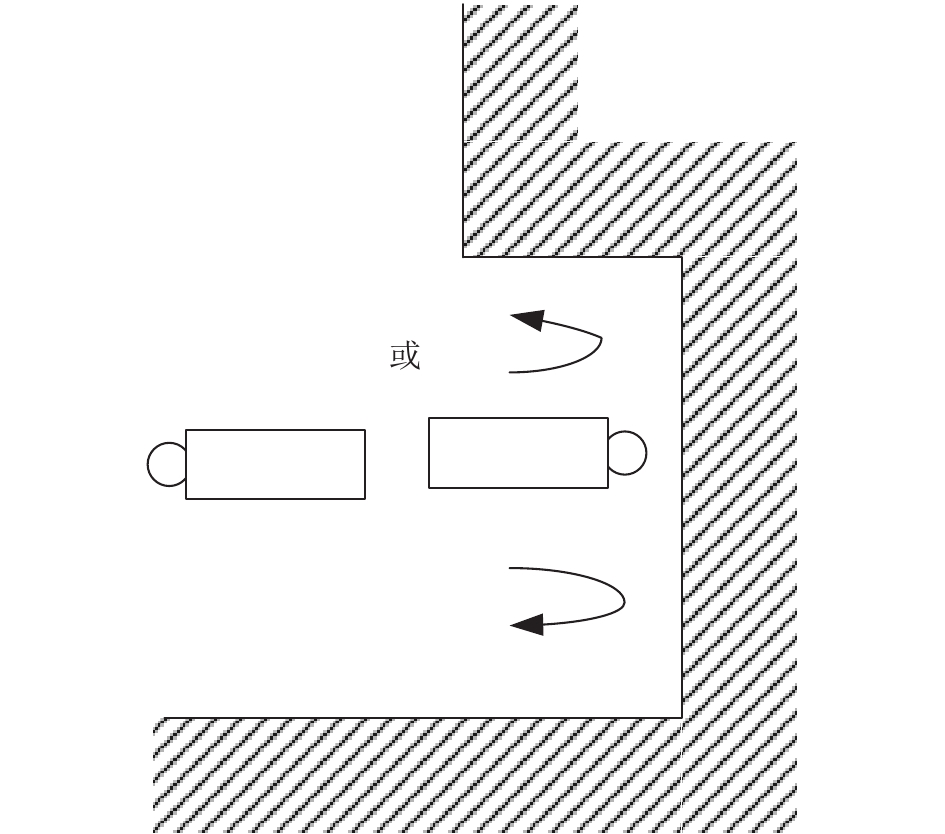
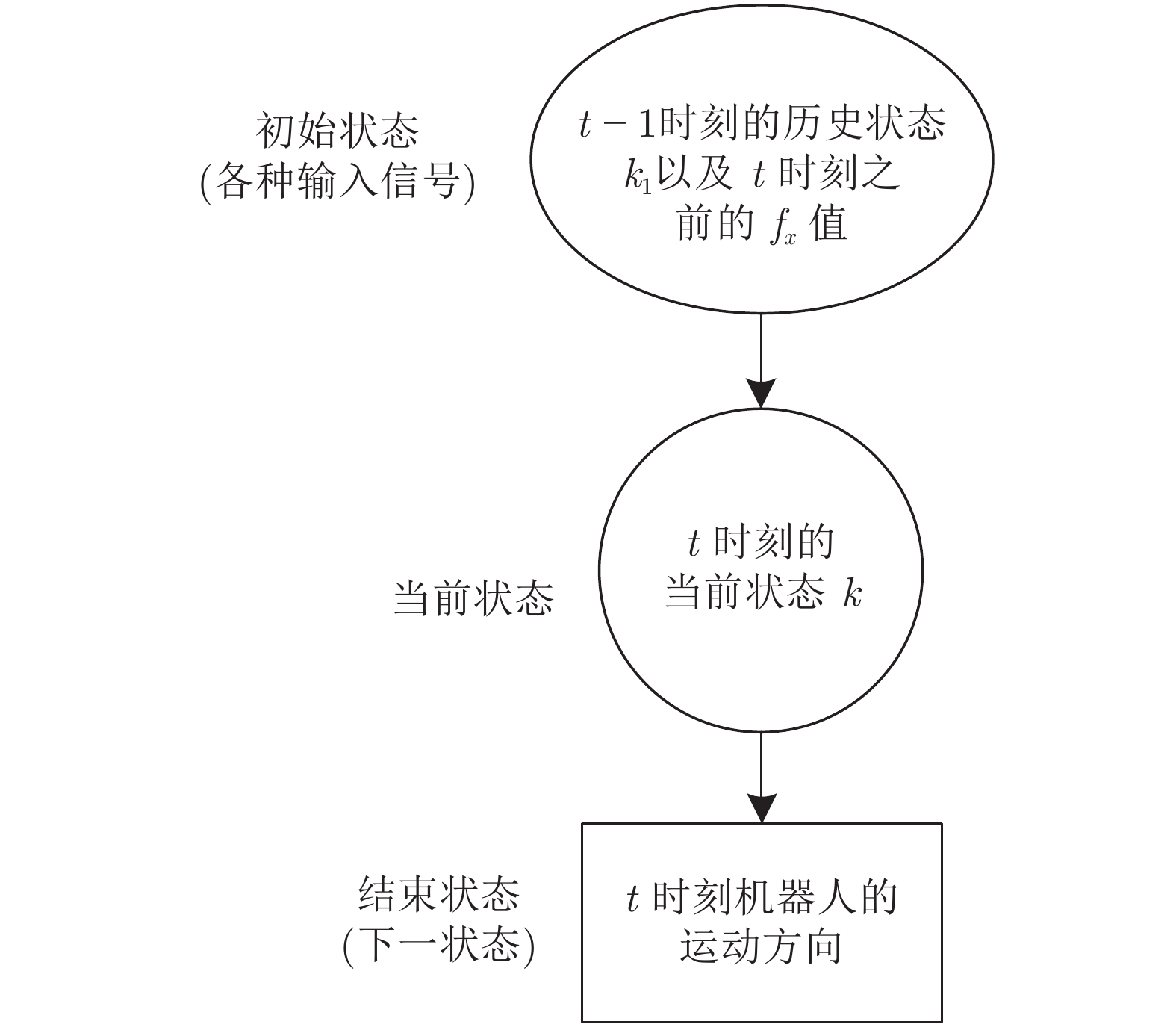
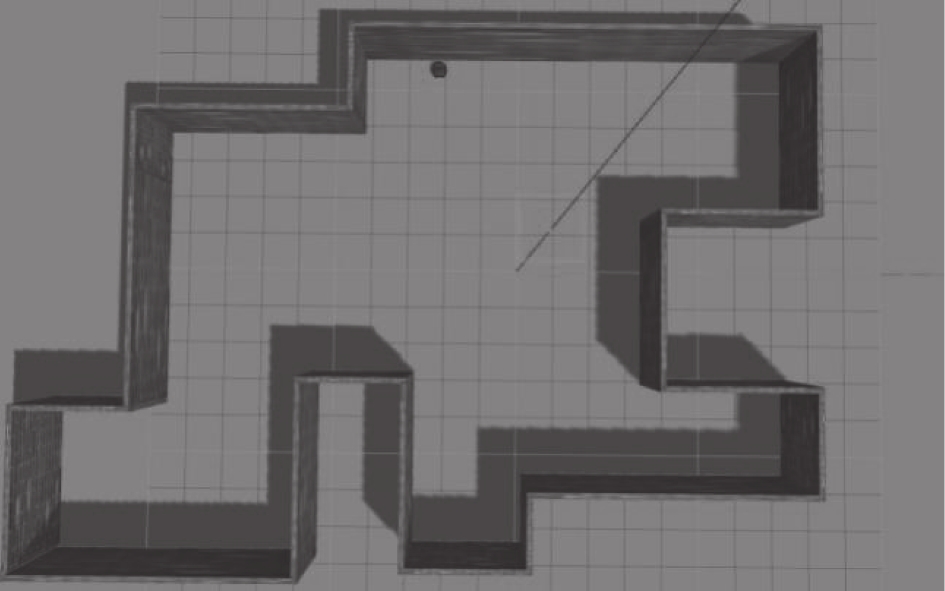
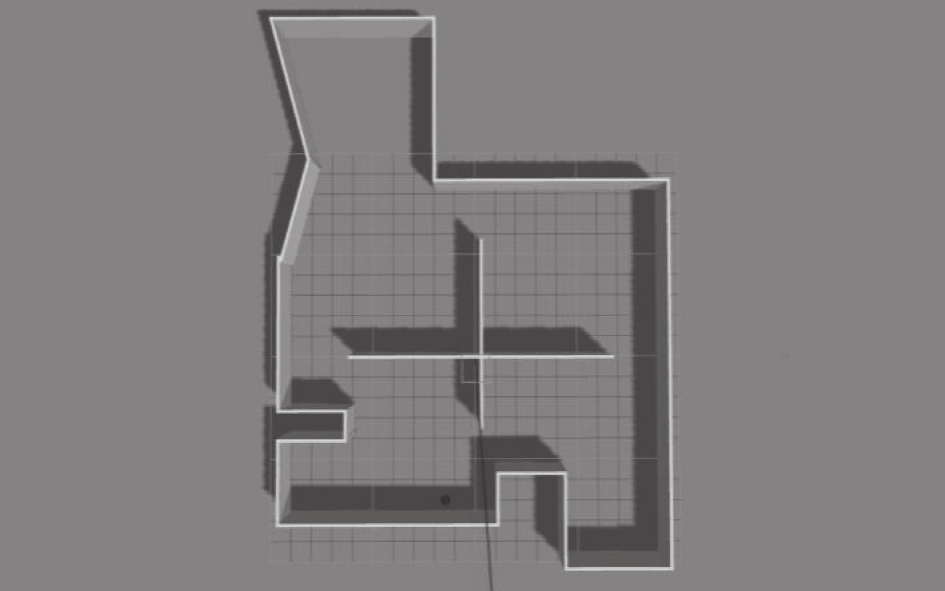
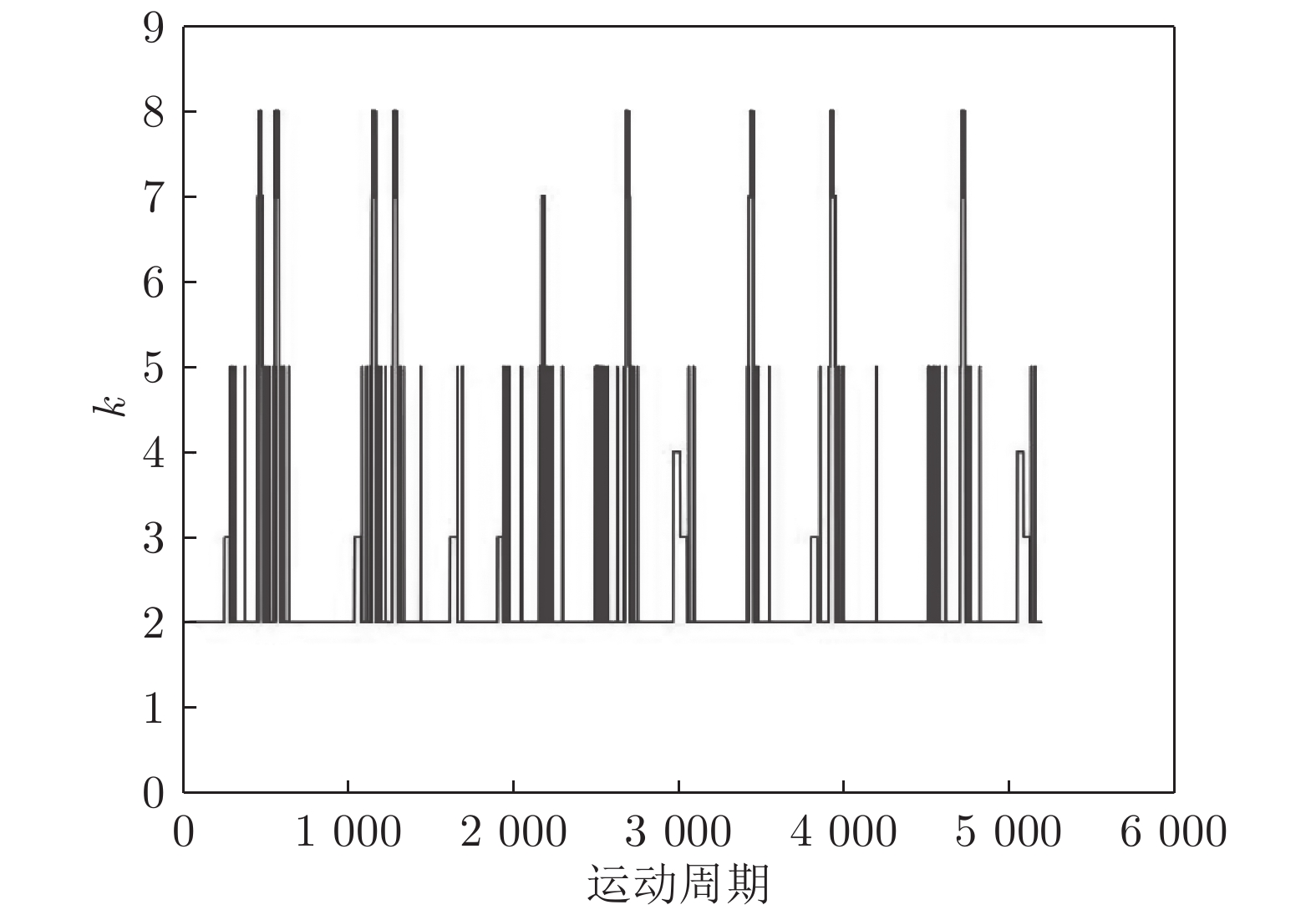
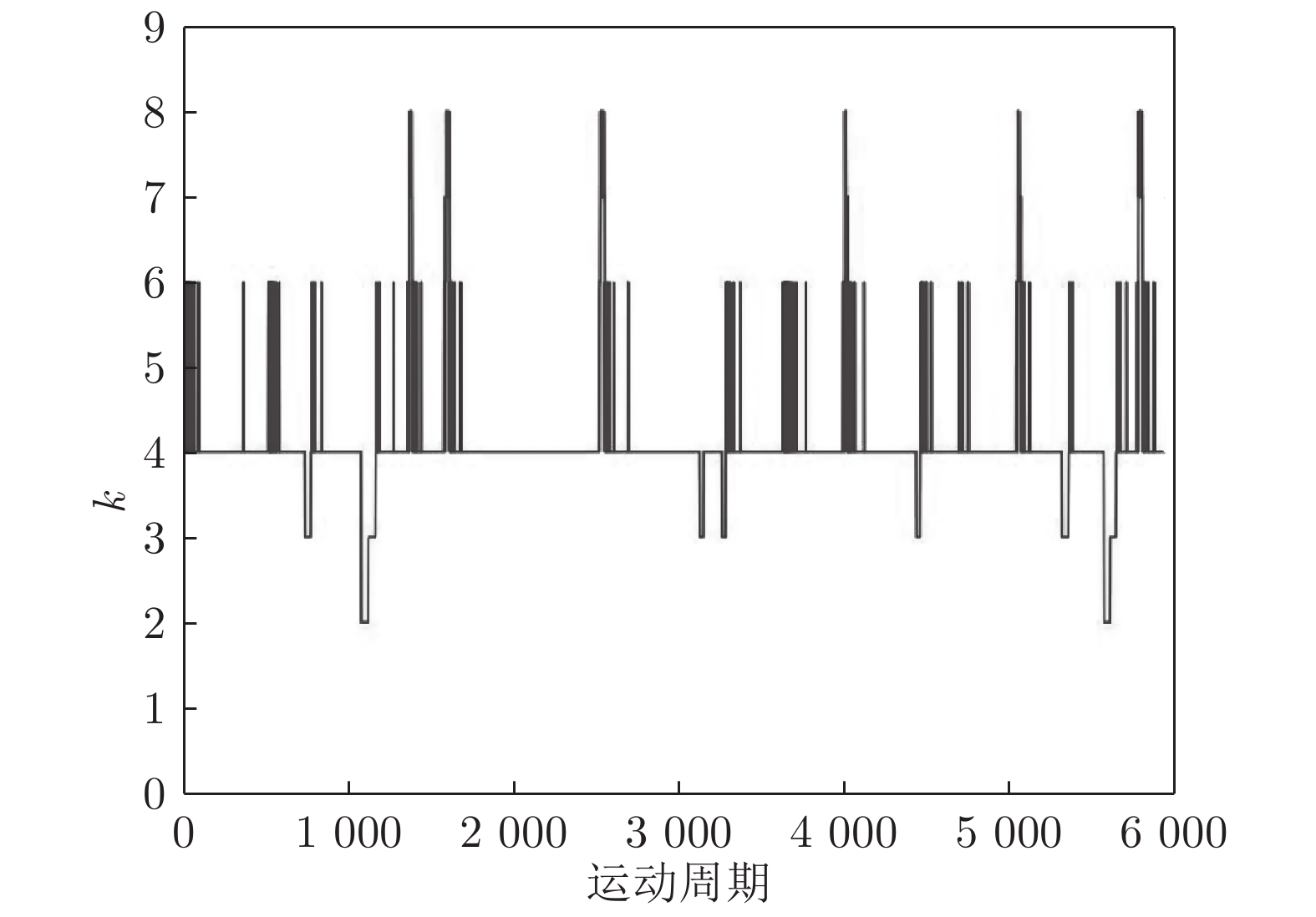
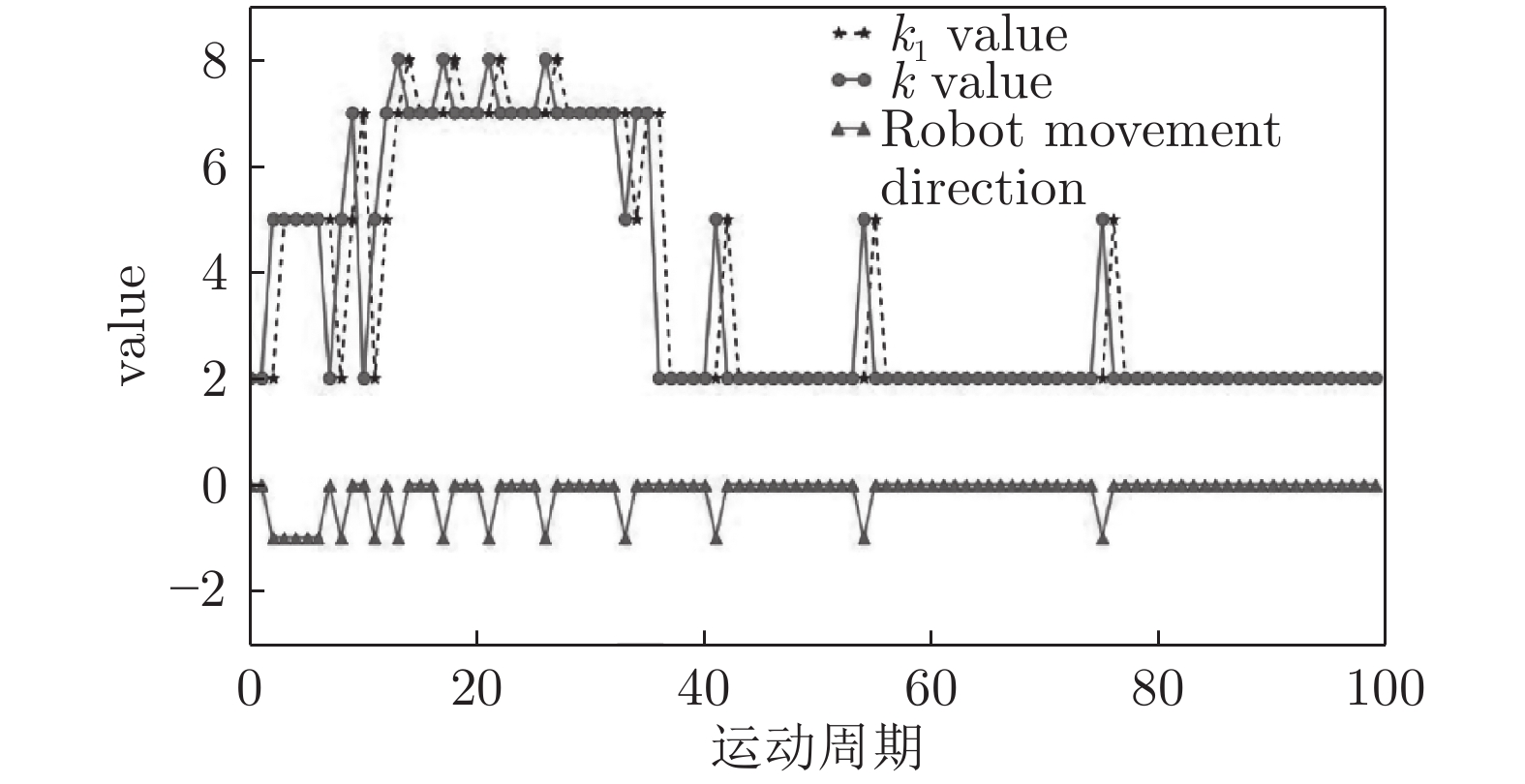
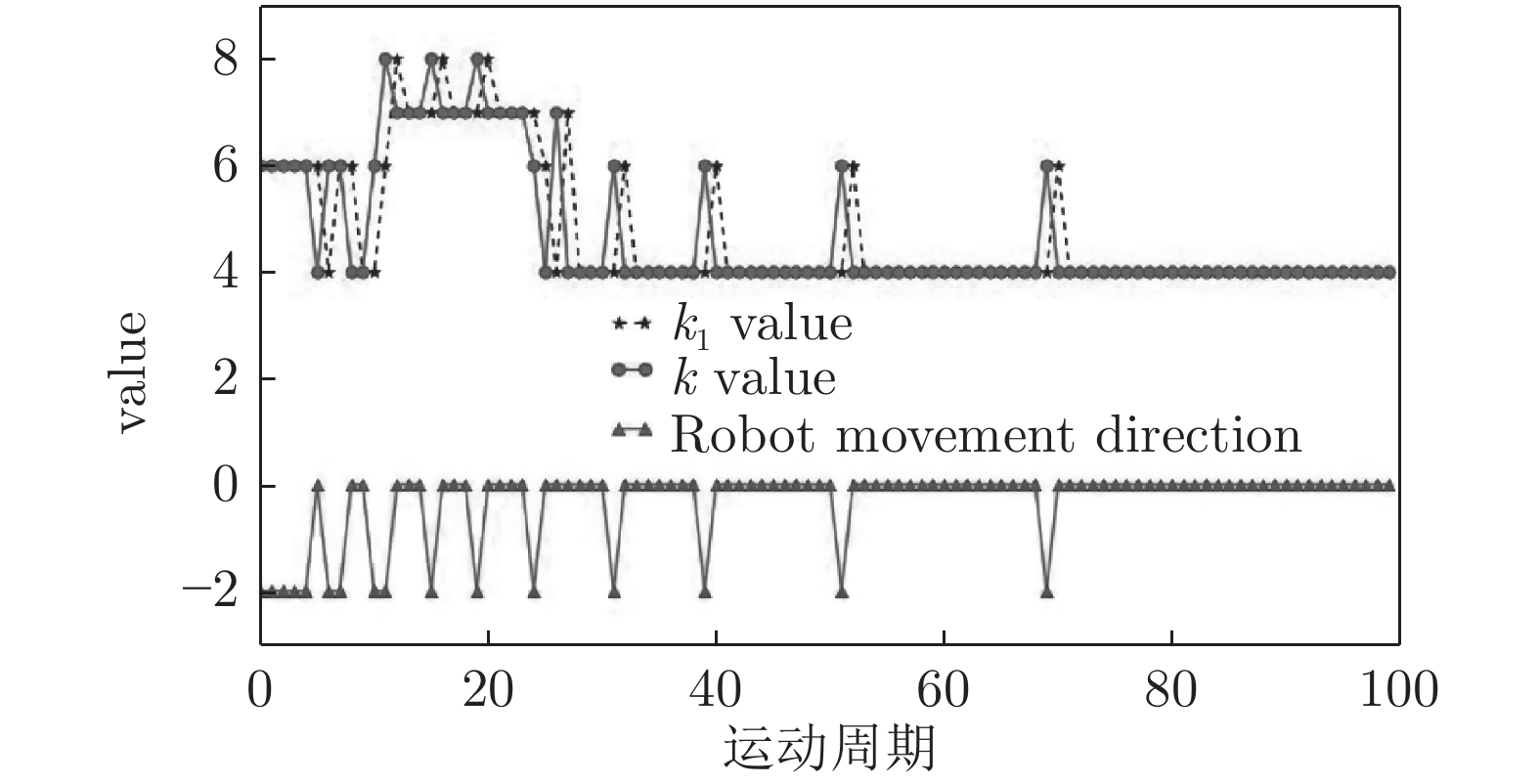
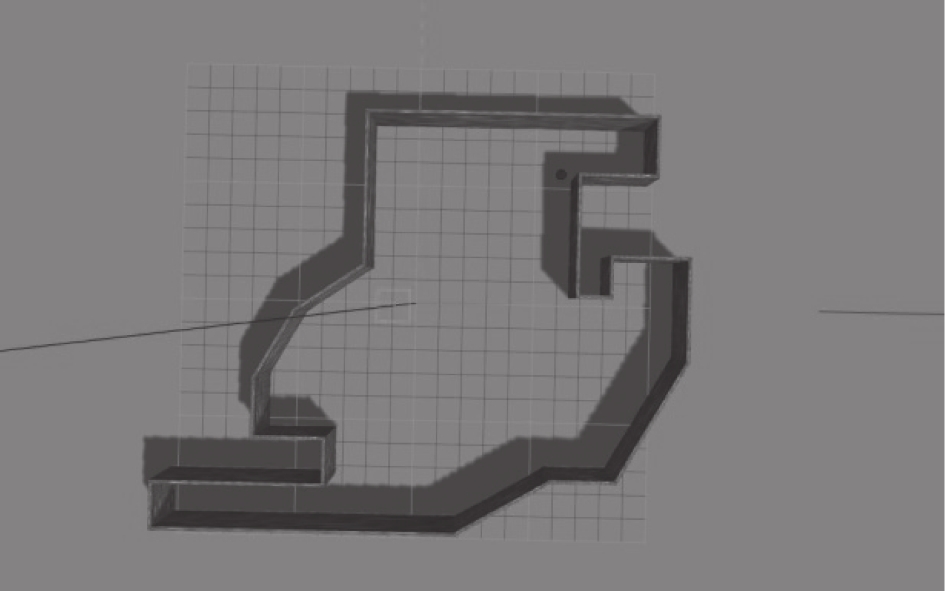
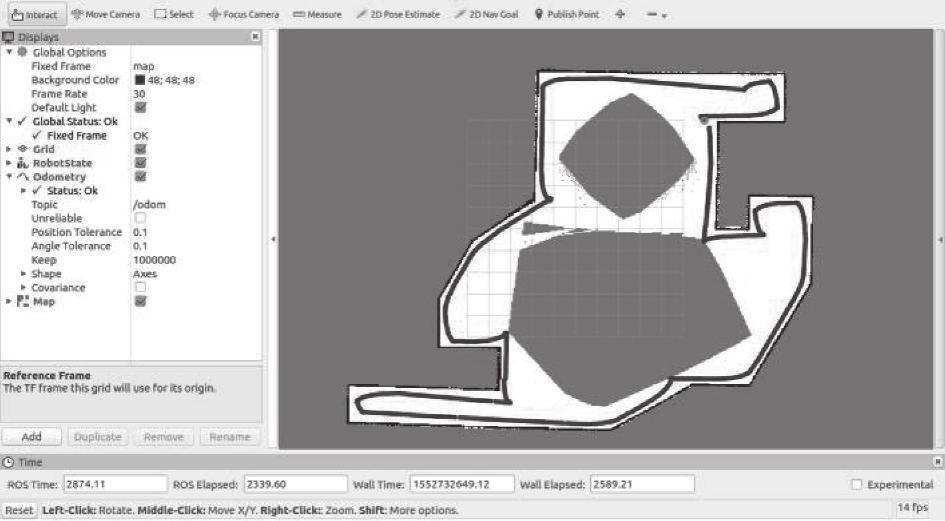
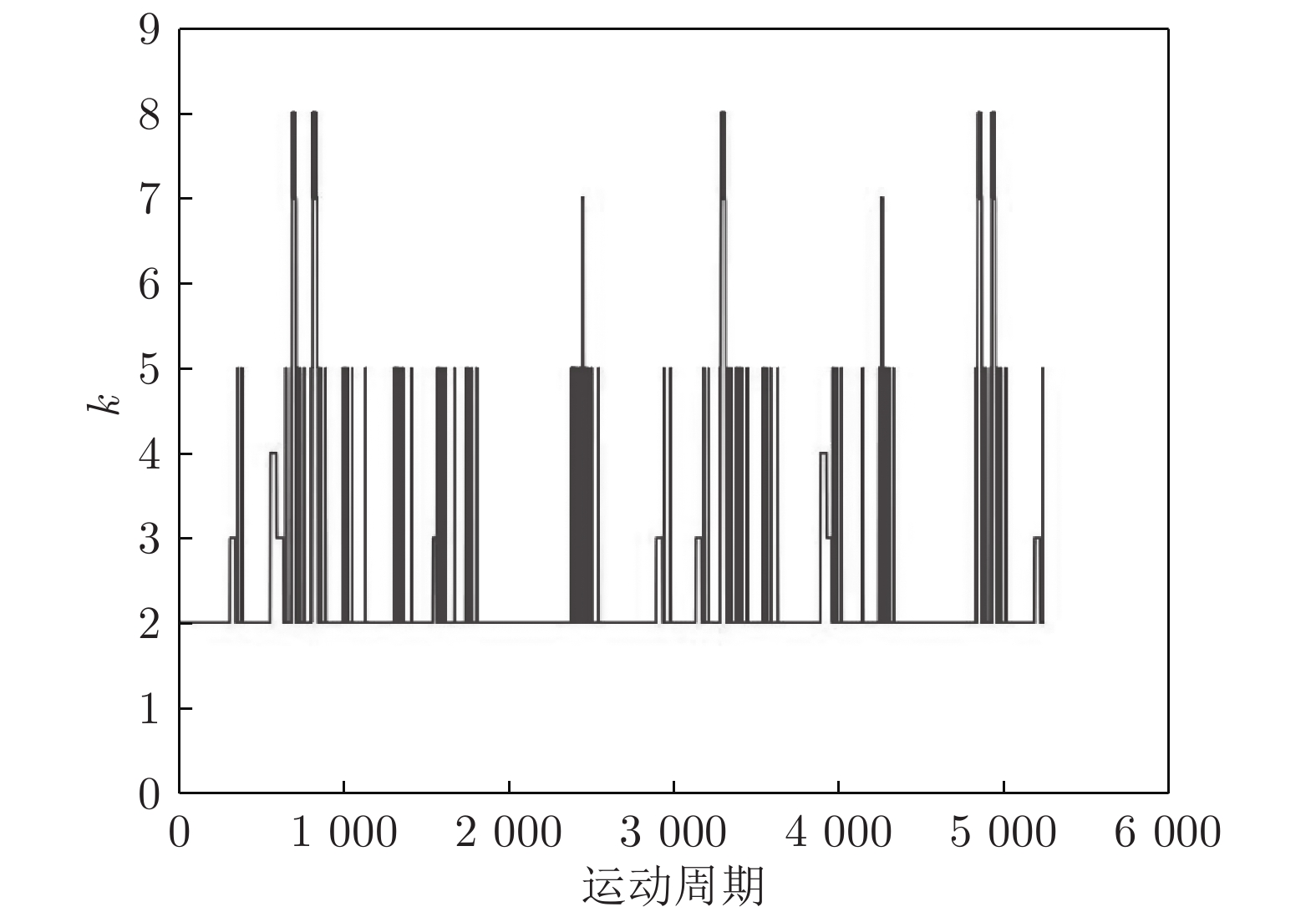
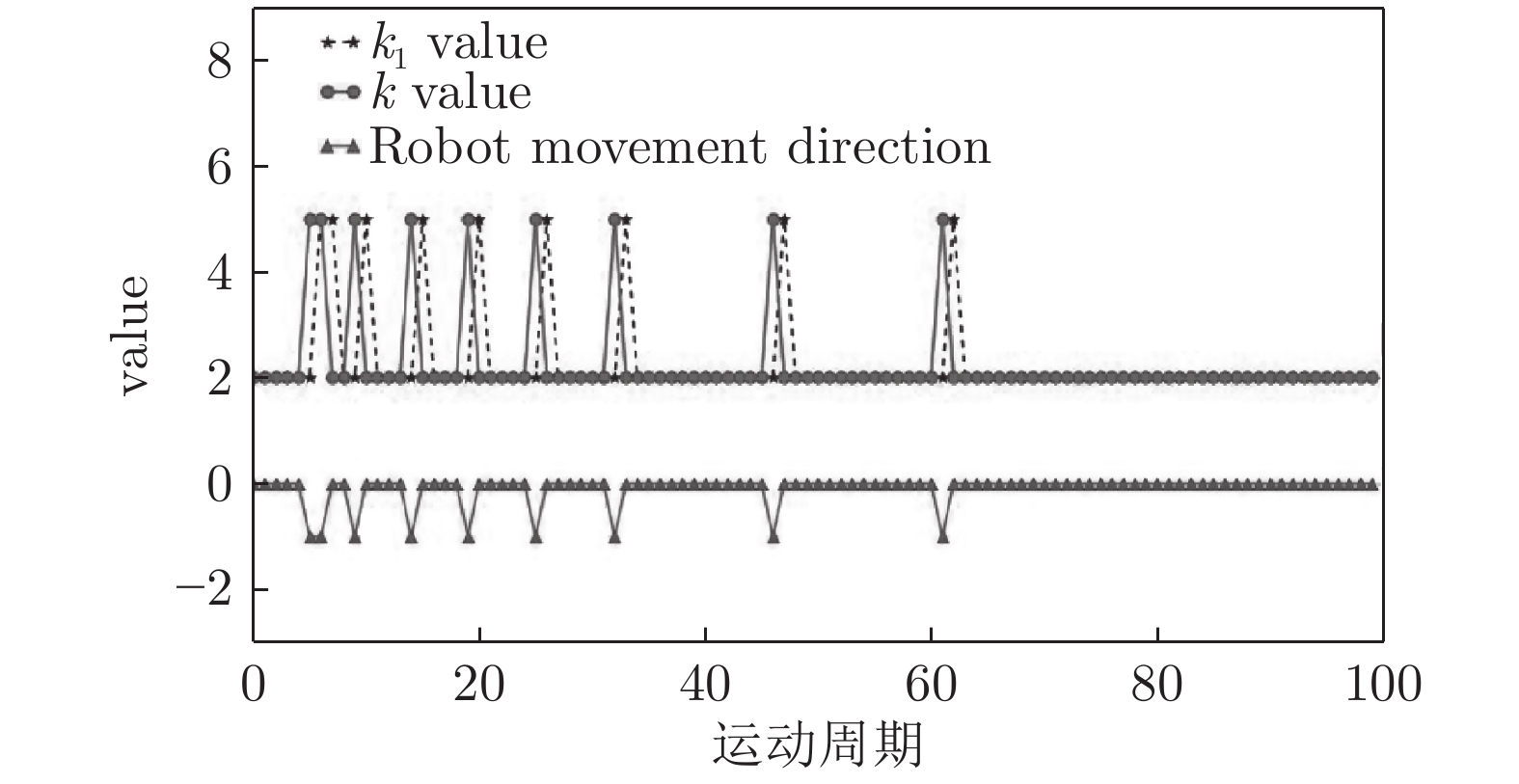
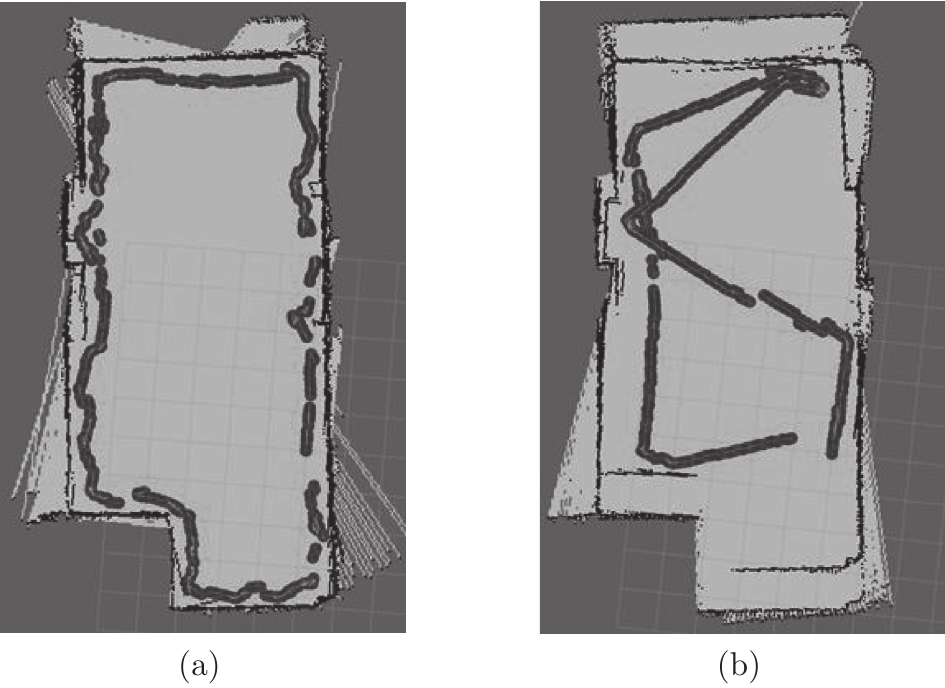
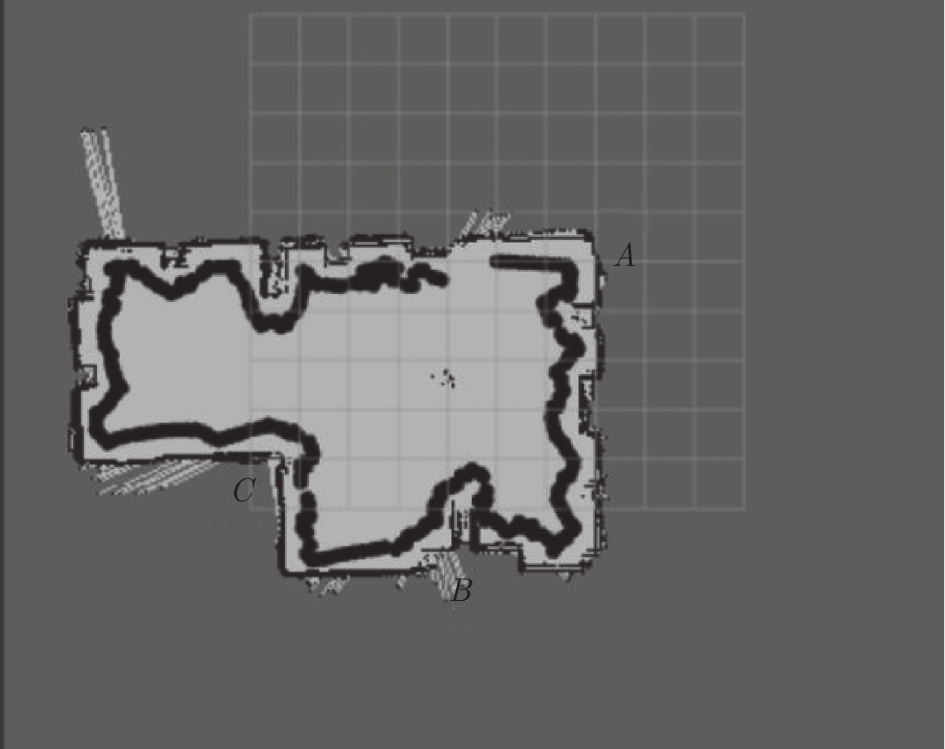
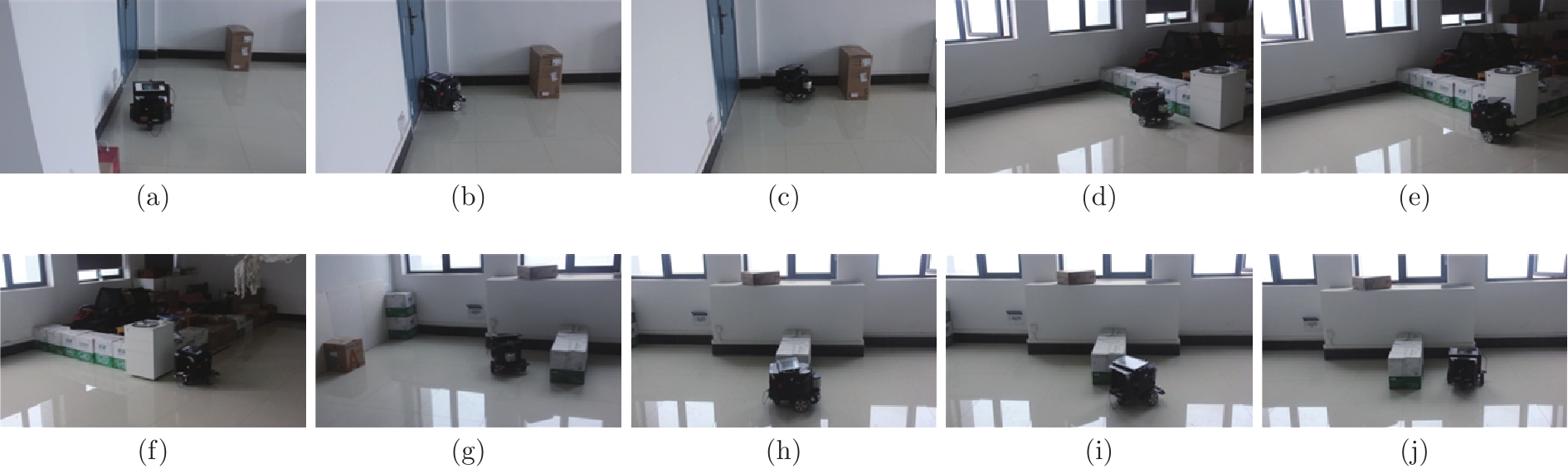
针对目前室内移动机器人沿墙走算法过于复杂、路径易重复、不能完全遍历、效率低等问题, 采用室内未知环境下结合历史状态的机器人沿墙高效遍历研究来解决这些问题. 该算法由移动机器人的上一个周期历史环境运动状态(分8类)、当前环境运动状态(分8类)和旋向信息(分2类)建立运动规则库, 沿墙行走时移动机器人时时采集这三类信息(上一个周期历史环境运动状态、当前环境运动状态和旋向信息)决定移动机器人当前的运动方向, 如此循环直到完成指定的沿墙任务. 最后对该算法进行了仿真与实际实验, 实验结果证明该算法可以在不同的、复杂的环境中高效、快速地完成沿墙走的任务, 并且对室内未知环境有很好的适应性.
针对目前室内移动机器人沿墙走算法过于复杂、路径易重复、不能完全遍历、效率低等问题, 采用室内未知环境下结合历史状态的机器人沿墙高效遍历研究来解决这些问题. 该算法由移动机器人的上一个周期历史环境运动状态(分8类)、当前环境运动状态(分8类)和旋向信息(分2类)建立运动规则库, 沿墙行走时移动机器人时时采集这三类信息(上一个周期历史环境运动状态、当前环境运动状态和旋向信息)决定移动机器人当前的运动方向, 如此循环直到完成指定的沿墙任务. 最后对该算法进行了仿真与实际实验, 实验结果证明该算法可以在不同的、复杂的环境中高效、快速地完成沿墙走的任务, 并且对室内未知环境有很好的适应性.







2020, 46(6): 1178-1187.
doi: 10.16383/j.aas.c180795
cstr: 32138.14.j.aas.c180795
摘要:
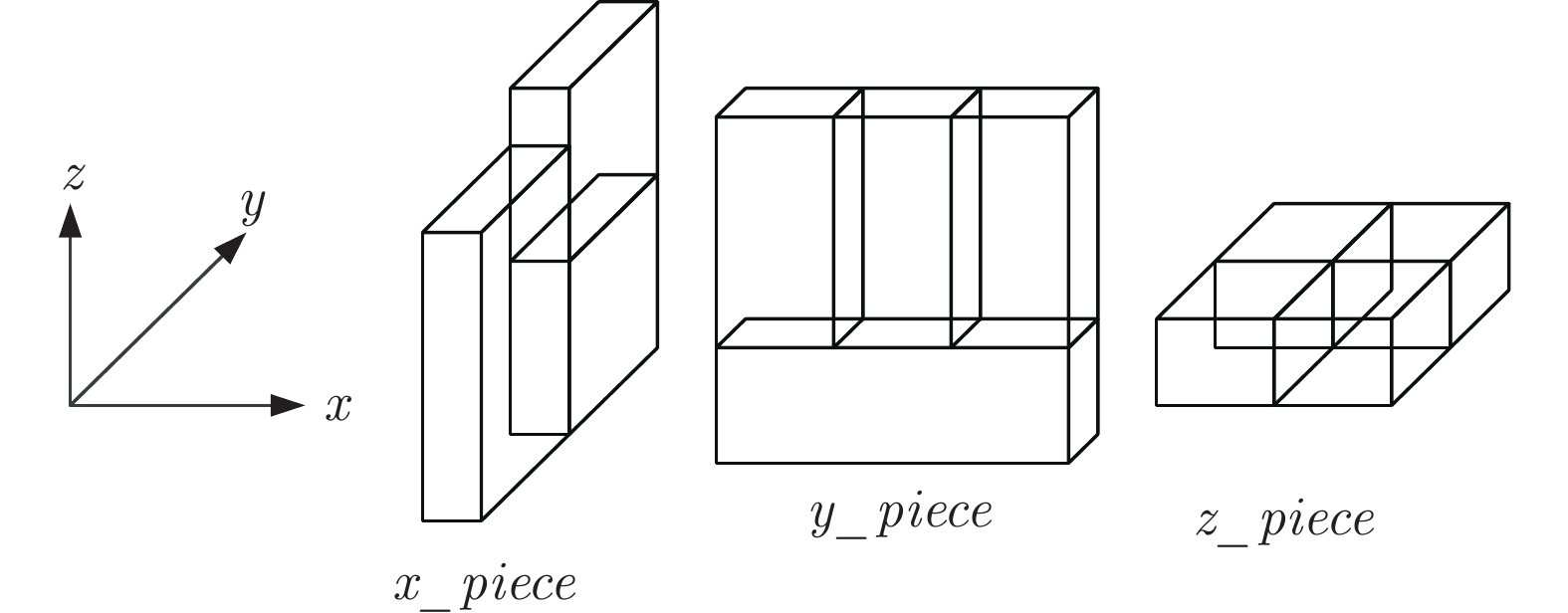
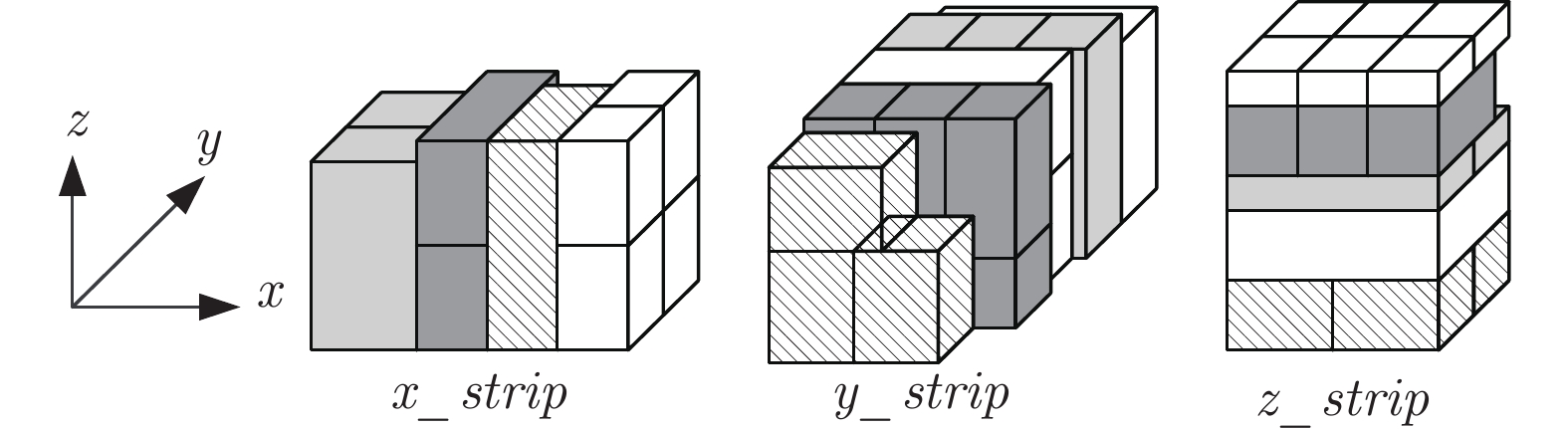
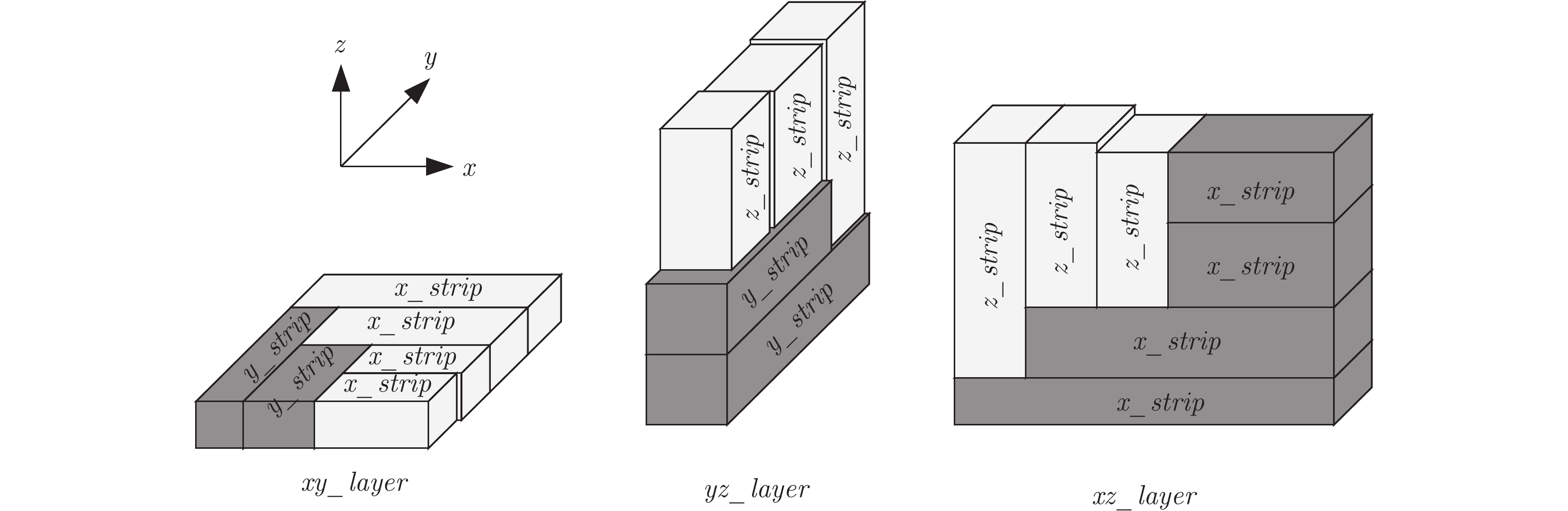
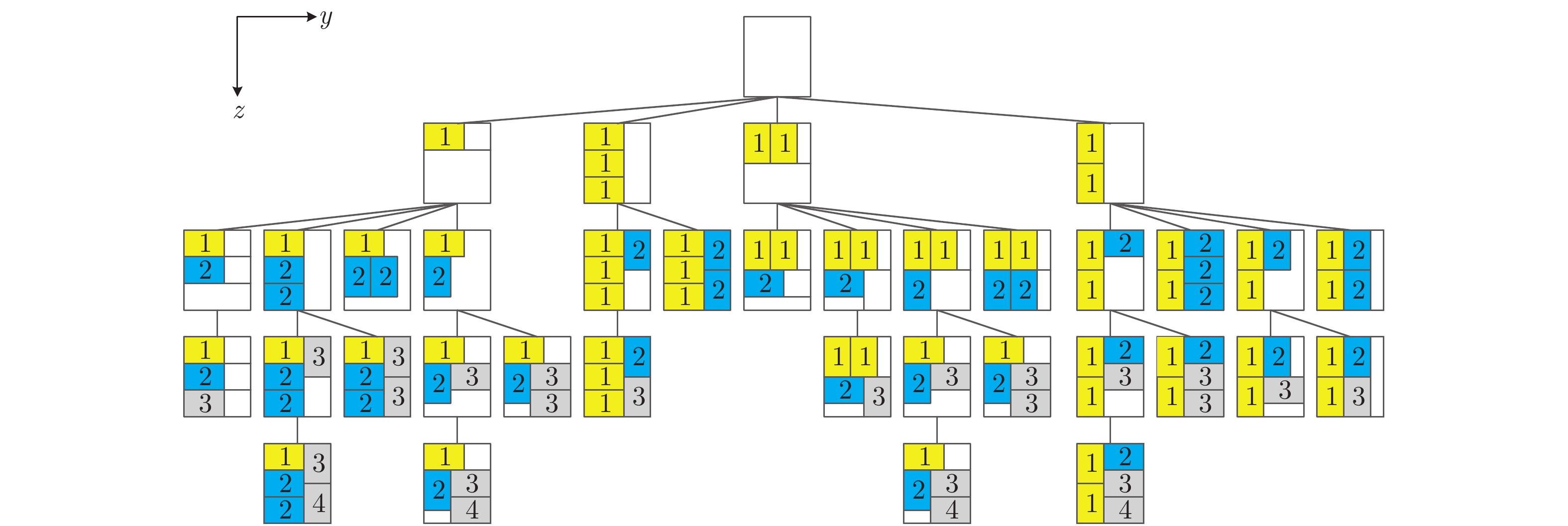
提出了一种求解三维装箱问题的多层树搜索算法, 该算法采用箱子–片–条–层–实体的顺序生成装载方案, 装载方案由实体表示. 该算法由3层搜索树构成. 第1层为三叉树, 每个树节点的3个分叉分别对应向实体中填入XY面平行层、XZ面平行层、YZ面平行层; 第2层为二叉树, 每个树节点的两个分叉分别对应向层内装载两个相互垂直的最优条; 第3层为四叉树, 用于将同种的多个箱子生成片. 在同时满足摆放方向约束和完全支撑约束的前提下, 该算法求解BR12~BR15得到的填充率高于现有装箱算法.
提出了一种求解三维装箱问题的多层树搜索算法, 该算法采用箱子–片–条–层–实体的顺序生成装载方案, 装载方案由实体表示. 该算法由3层搜索树构成. 第1层为三叉树, 每个树节点的3个分叉分别对应向实体中填入XY面平行层、XZ面平行层、YZ面平行层; 第2层为二叉树, 每个树节点的两个分叉分别对应向层内装载两个相互垂直的最优条; 第3层为四叉树, 用于将同种的多个箱子生成片. 在同时满足摆放方向约束和完全支撑约束的前提下, 该算法求解BR12~BR15得到的填充率高于现有装箱算法.


2020, 46(6): 1188-1199.
doi: 10.16383/j.aas.c180759
cstr: 32138.14.j.aas.c180759
摘要:
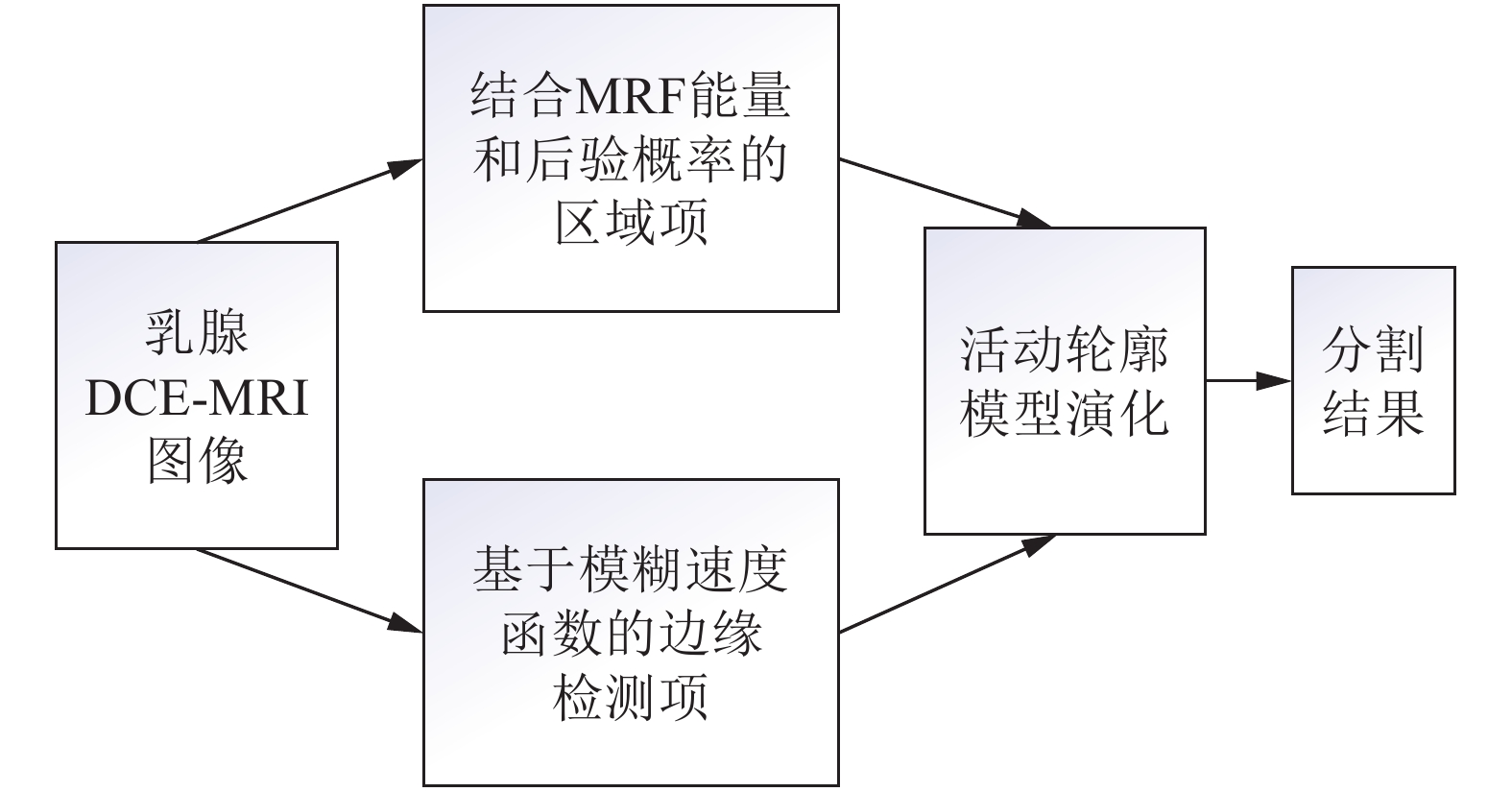
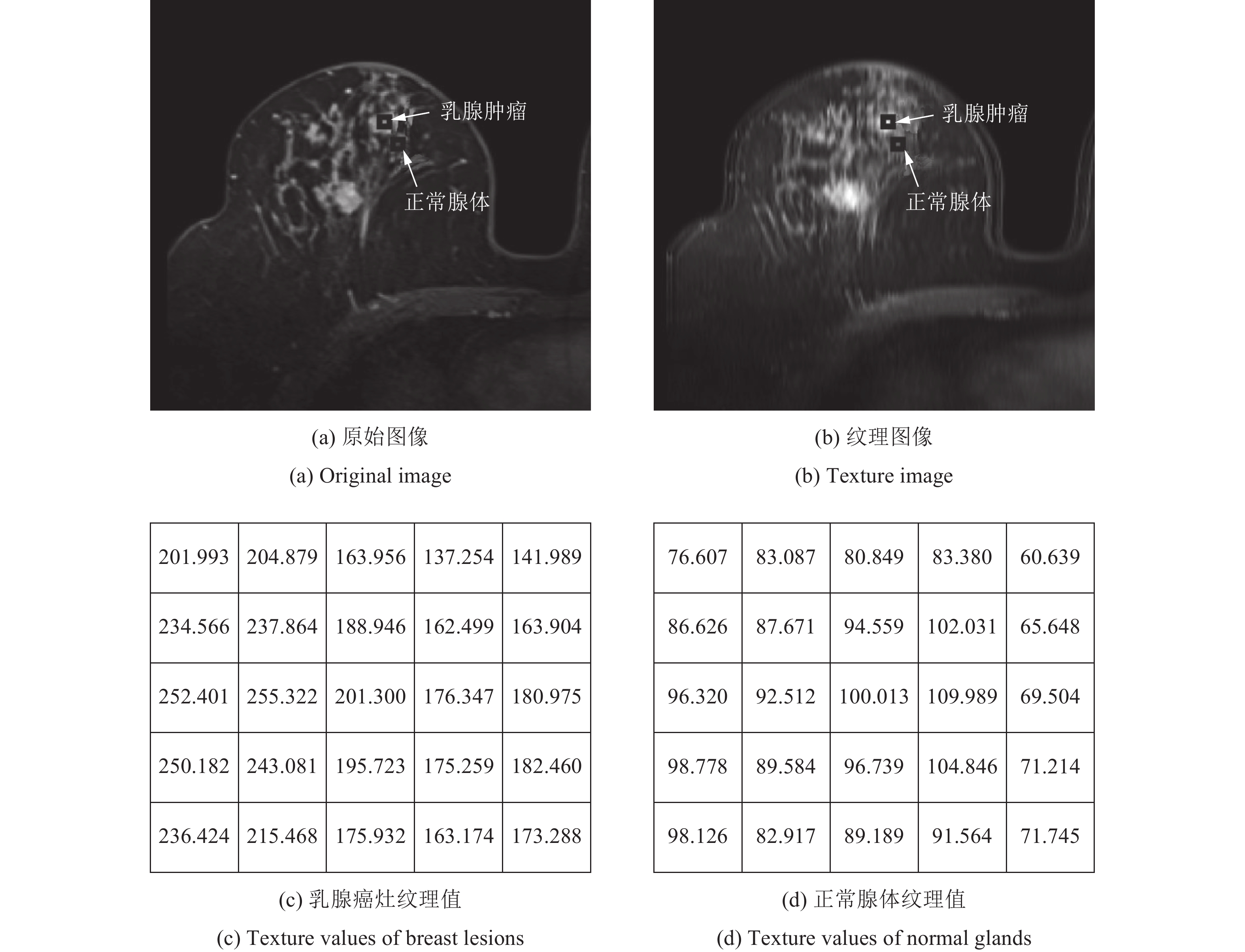
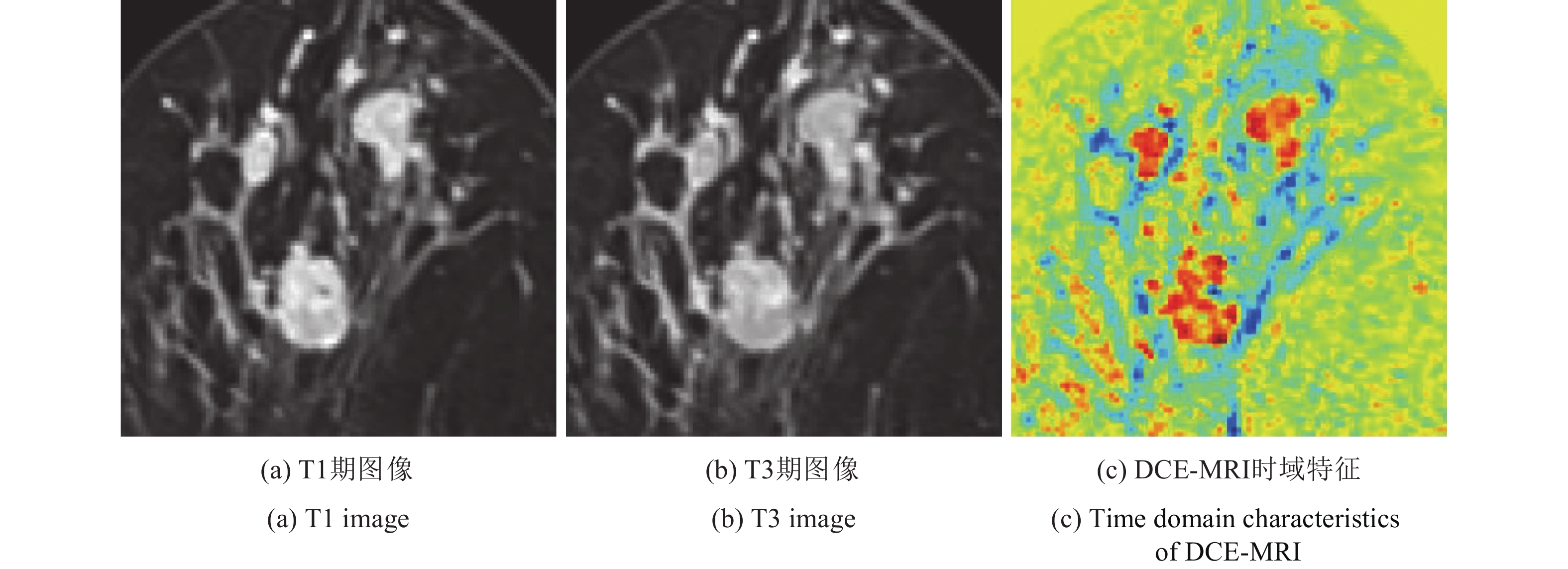
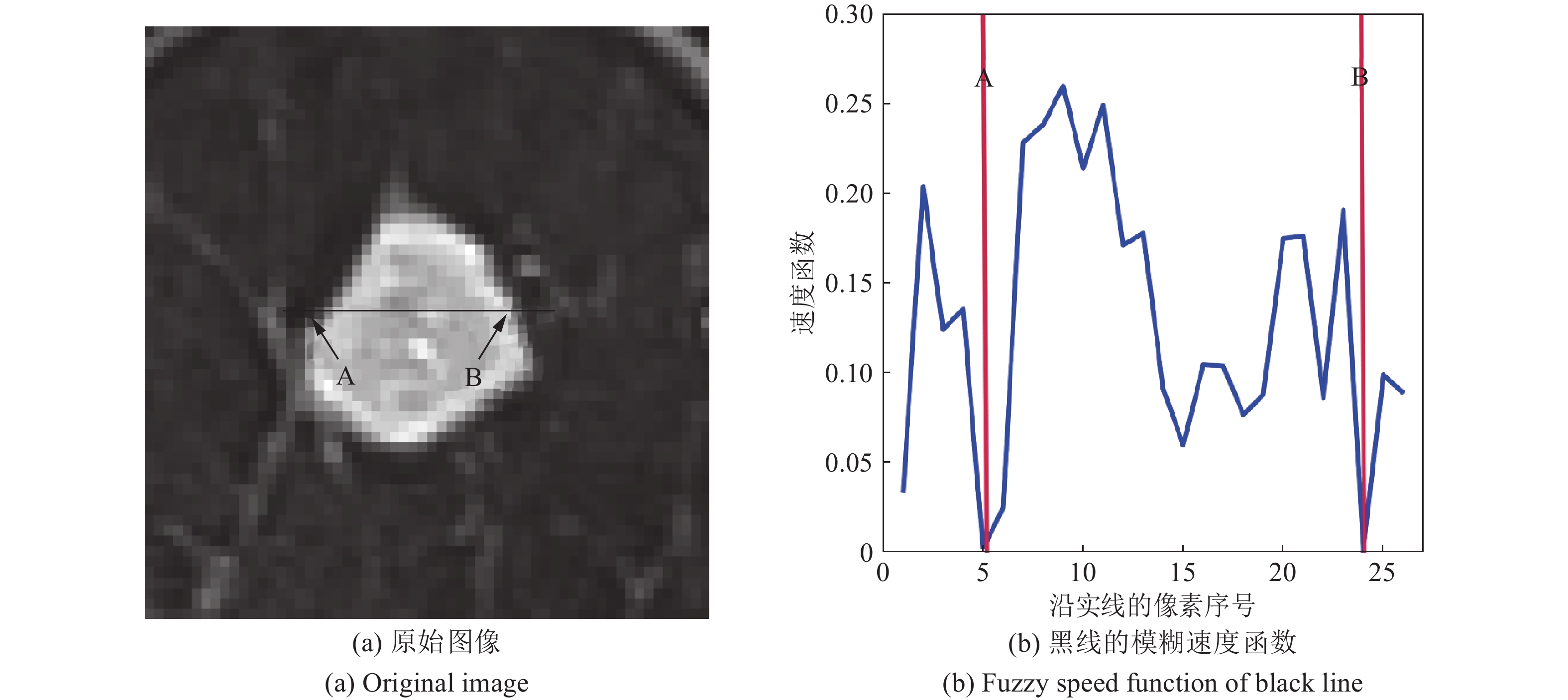
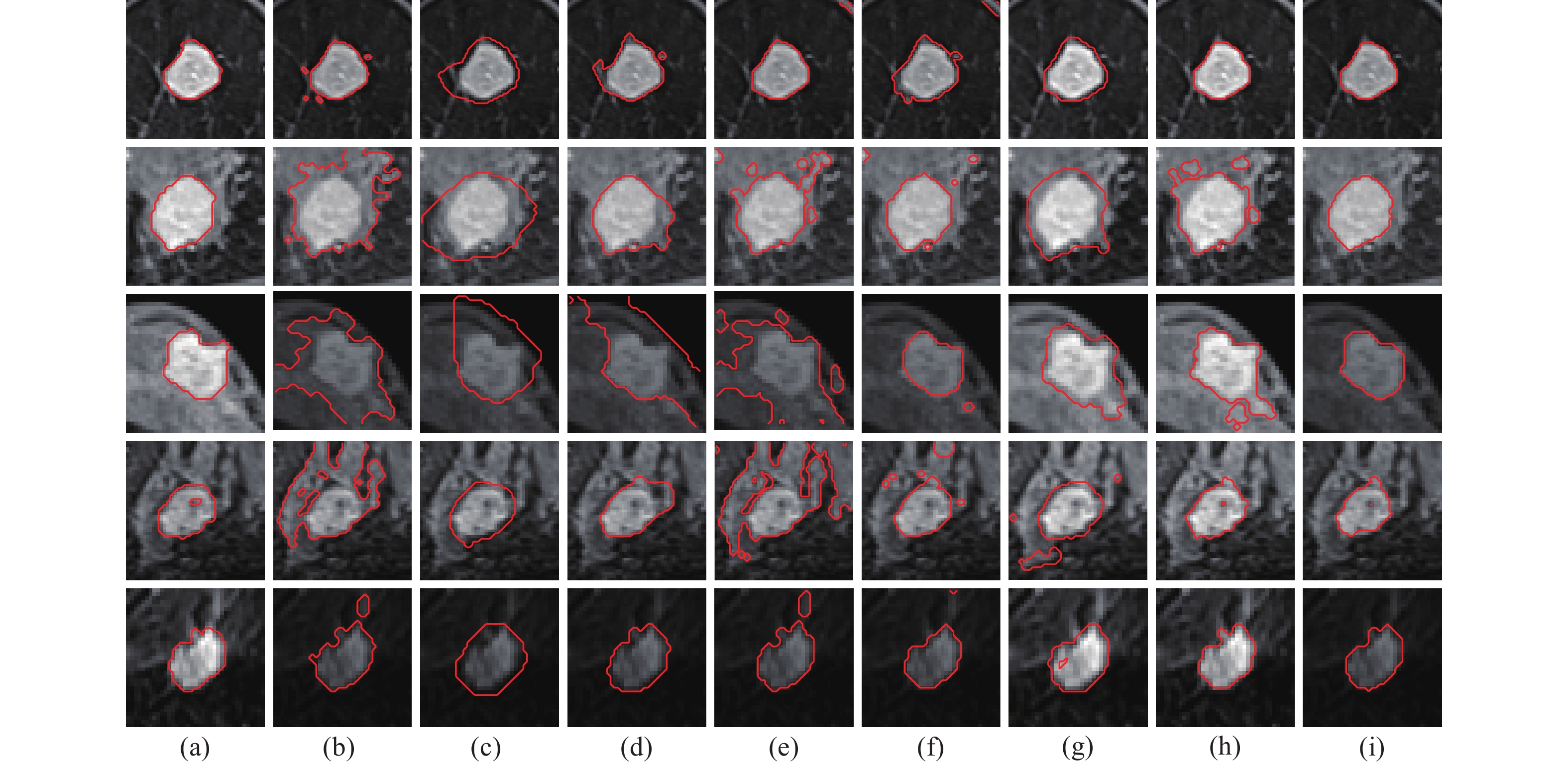
乳腺癌灶的精确分割是乳腺癌计算机辅助诊断的重要前提. 在动态对比增强核磁共振成像(Dynamic contrast-enhanced magnetic resonance imaging, DCE-MRI)的图像中, 乳腺癌灶具有对比度低、边界模糊及亮度不均匀等特点, 传统的活动轮廓模型方法很难取得准确的分割结果. 本文提出一种结合马尔科夫随机场(Markov random field, MRF)能量和模糊速度函数的活动轮廓模型的半自动分割方法来完成乳腺癌灶的分割, 相对于专业医生的手动分割, 本文方法具有速度快、可重复性高和分割结果相对客观等优点. 首先, 计算乳腺DCE-MRI图像的MRF能量, 以增强目标区域与周围背景的差异. 其次, 在能量图中计算每个像素点的后验概率, 建立基于后验概率驱动的活动轮廓模型区域项. 最后, 结合Gabor纹理特征、DCE-MRI时域特征和灰度特征构建模糊速度函数, 将其引入到活动轮廓模型中作为边缘检测项. 在乳腺癌灶边界处, 该速度函数趋向于零, 活动轮廓曲线停止演变, 完成对乳腺癌灶的分割. 实验结果表明, 所提出的方法有助于乳腺癌灶在DCE-MRI图像中的准确分割.
乳腺癌灶的精确分割是乳腺癌计算机辅助诊断的重要前提. 在动态对比增强核磁共振成像(Dynamic contrast-enhanced magnetic resonance imaging, DCE-MRI)的图像中, 乳腺癌灶具有对比度低、边界模糊及亮度不均匀等特点, 传统的活动轮廓模型方法很难取得准确的分割结果. 本文提出一种结合马尔科夫随机场(Markov random field, MRF)能量和模糊速度函数的活动轮廓模型的半自动分割方法来完成乳腺癌灶的分割, 相对于专业医生的手动分割, 本文方法具有速度快、可重复性高和分割结果相对客观等优点. 首先, 计算乳腺DCE-MRI图像的MRF能量, 以增强目标区域与周围背景的差异. 其次, 在能量图中计算每个像素点的后验概率, 建立基于后验概率驱动的活动轮廓模型区域项. 最后, 结合Gabor纹理特征、DCE-MRI时域特征和灰度特征构建模糊速度函数, 将其引入到活动轮廓模型中作为边缘检测项. 在乳腺癌灶边界处, 该速度函数趋向于零, 活动轮廓曲线停止演变, 完成对乳腺癌灶的分割. 实验结果表明, 所提出的方法有助于乳腺癌灶在DCE-MRI图像中的准确分割.


2020, 46(6): 1200-1209.
doi: 10.16383/j.aas.c180065
cstr: 32138.14.j.aas.c180065
摘要:
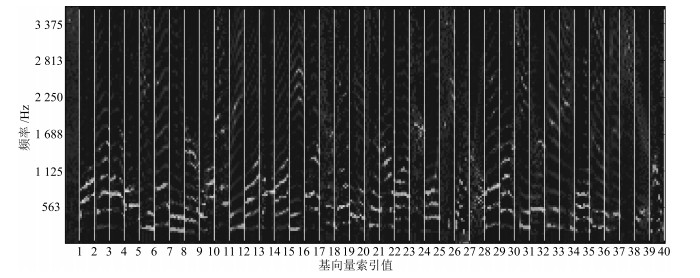
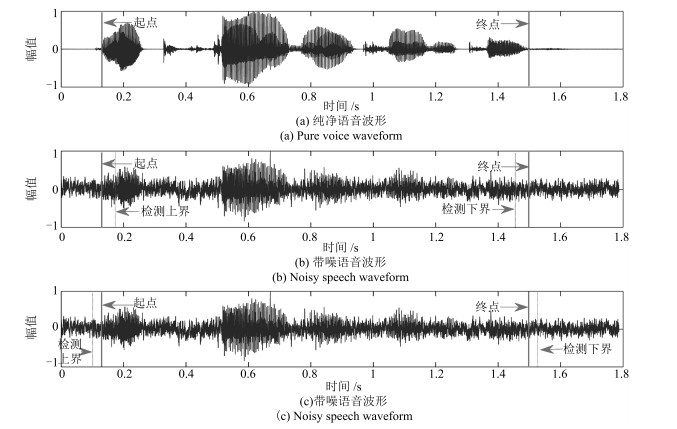
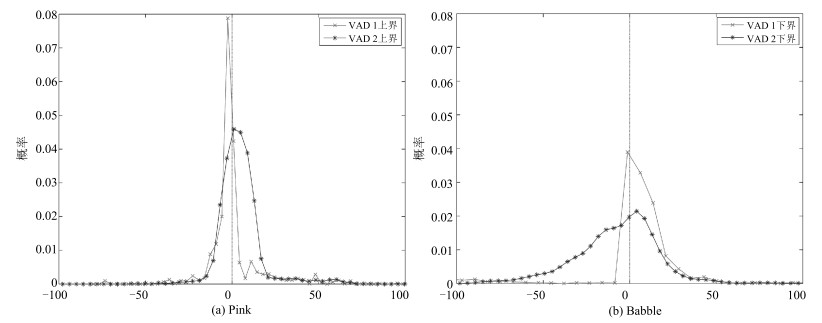
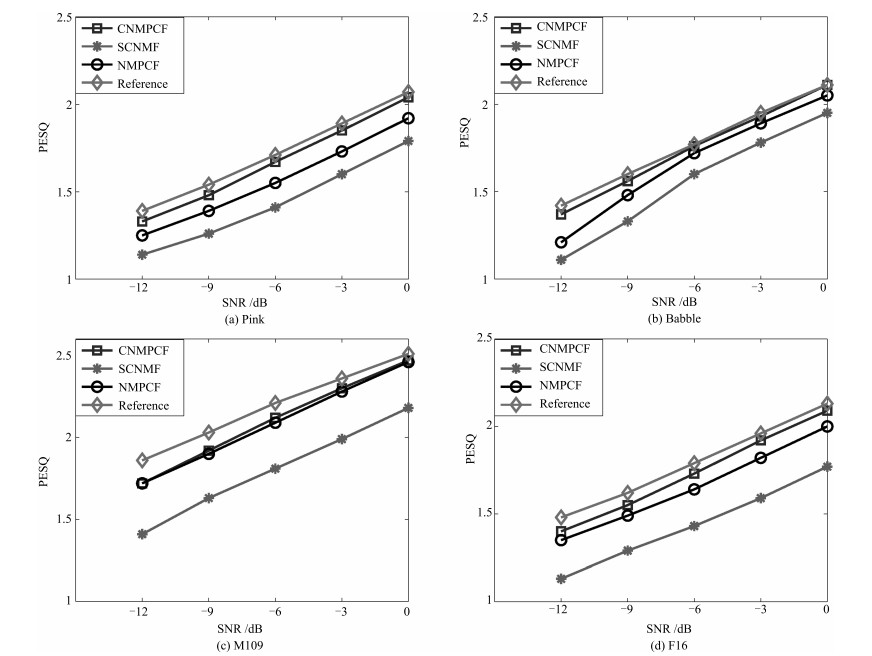
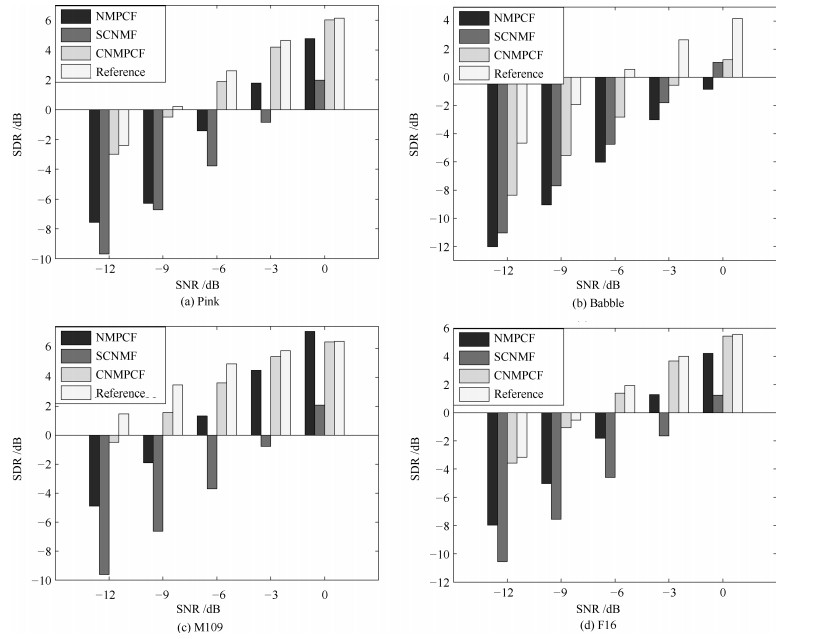
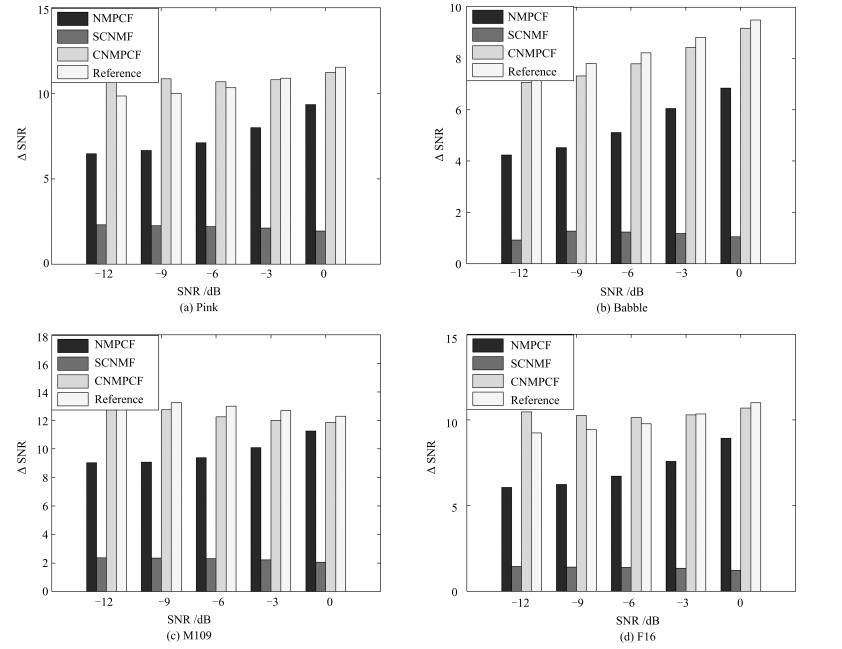
非负矩阵部分联合分解(Nonnegative matrix partial co-factorization, NMPCF)将指定源频谱作为边信息参与混合信号频谱的联合分解, 以帮助确定指定源的基向量进而提高信号分离性能.卷积非负矩阵分解(Convolutive nonnegative matrix factorization, CNMF)采用卷积基分解的方法进行矩阵分解, 在单声道语音分离方面取得较好的效果.为了实现强噪声条件下的语音分离, 本文结合以上两种算法的优势, 提出一种基于卷积非负矩阵部分联合分解(Convolutive nonnegative partial matrix co-factorization, CNMPCF)的单声道语音分离算法.本算法首先通过基音检测算法得到混合信号的语音起始点, 再据此确定混合信号中的纯噪声段, 最后将混合信号频谱和噪声频谱进行卷积非负矩阵部分联合分解, 得到语音基矩阵, 进而得到分离的语音频谱和时域信号.实验中, 混合语音信噪比(Signal noise ratio, SNR)选择以-3 dB为间隔从0 dB至-12 dB共5种SNR.实验结果表明, 在不同噪声类型和噪声强度条件下, 本文提出的CNMPCF方法相比于以上两种方法均有不同程度的提高.
非负矩阵部分联合分解(Nonnegative matrix partial co-factorization, NMPCF)将指定源频谱作为边信息参与混合信号频谱的联合分解, 以帮助确定指定源的基向量进而提高信号分离性能.卷积非负矩阵分解(Convolutive nonnegative matrix factorization, CNMF)采用卷积基分解的方法进行矩阵分解, 在单声道语音分离方面取得较好的效果.为了实现强噪声条件下的语音分离, 本文结合以上两种算法的优势, 提出一种基于卷积非负矩阵部分联合分解(Convolutive nonnegative partial matrix co-factorization, CNMPCF)的单声道语音分离算法.本算法首先通过基音检测算法得到混合信号的语音起始点, 再据此确定混合信号中的纯噪声段, 最后将混合信号频谱和噪声频谱进行卷积非负矩阵部分联合分解, 得到语音基矩阵, 进而得到分离的语音频谱和时域信号.实验中, 混合语音信噪比(Signal noise ratio, SNR)选择以-3 dB为间隔从0 dB至-12 dB共5种SNR.实验结果表明, 在不同噪声类型和噪声强度条件下, 本文提出的CNMPCF方法相比于以上两种方法均有不同程度的提高.

2020, 46(6): 1210-1219.
doi: 10.16383/j.aas.c180108
cstr: 32138.14.j.aas.c180108
摘要:
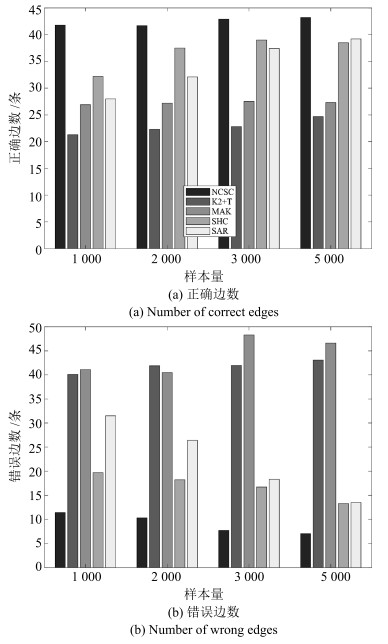
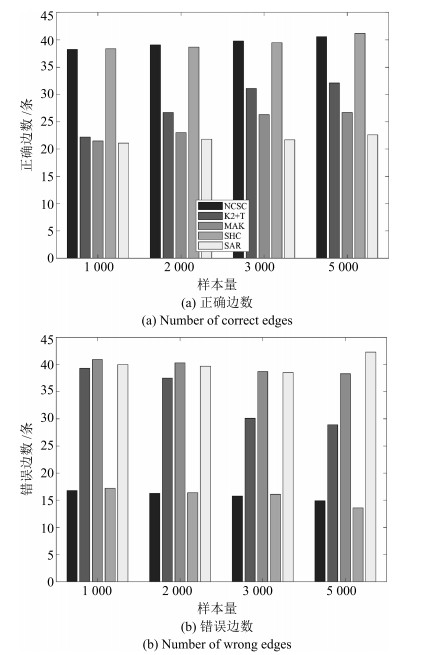
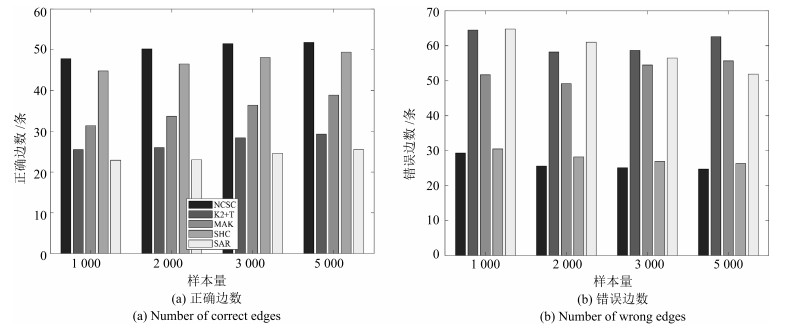
针对K2算法过度依赖节点序和节点序搜索算法评价节点序效率较低的问题, 提出一种基于节点块序列约束的局部贝叶斯网络结构搜索算法, 该算法首先通过评分定向构建定向支撑树结构, 在此基础上构建节点块序列, 然后利用节点块序列确定每个节点的潜在父节点集, 通过搜索每个节点的父节点集构建网络结构, 最后对该结构进行非法结构修正得到最优贝叶斯网络结构.利用标准网络将算法与几种不同类型的改进算法进行对比分析, 验证该算法的有效性.
针对K2算法过度依赖节点序和节点序搜索算法评价节点序效率较低的问题, 提出一种基于节点块序列约束的局部贝叶斯网络结构搜索算法, 该算法首先通过评分定向构建定向支撑树结构, 在此基础上构建节点块序列, 然后利用节点块序列确定每个节点的潜在父节点集, 通过搜索每个节点的父节点集构建网络结构, 最后对该结构进行非法结构修正得到最优贝叶斯网络结构.利用标准网络将算法与几种不同类型的改进算法进行对比分析, 验证该算法的有效性.

2020, 46(6): 1220-1228.
doi: 10.16383/j.aas.c180697
cstr: 32138.14.j.aas.c180697
摘要:
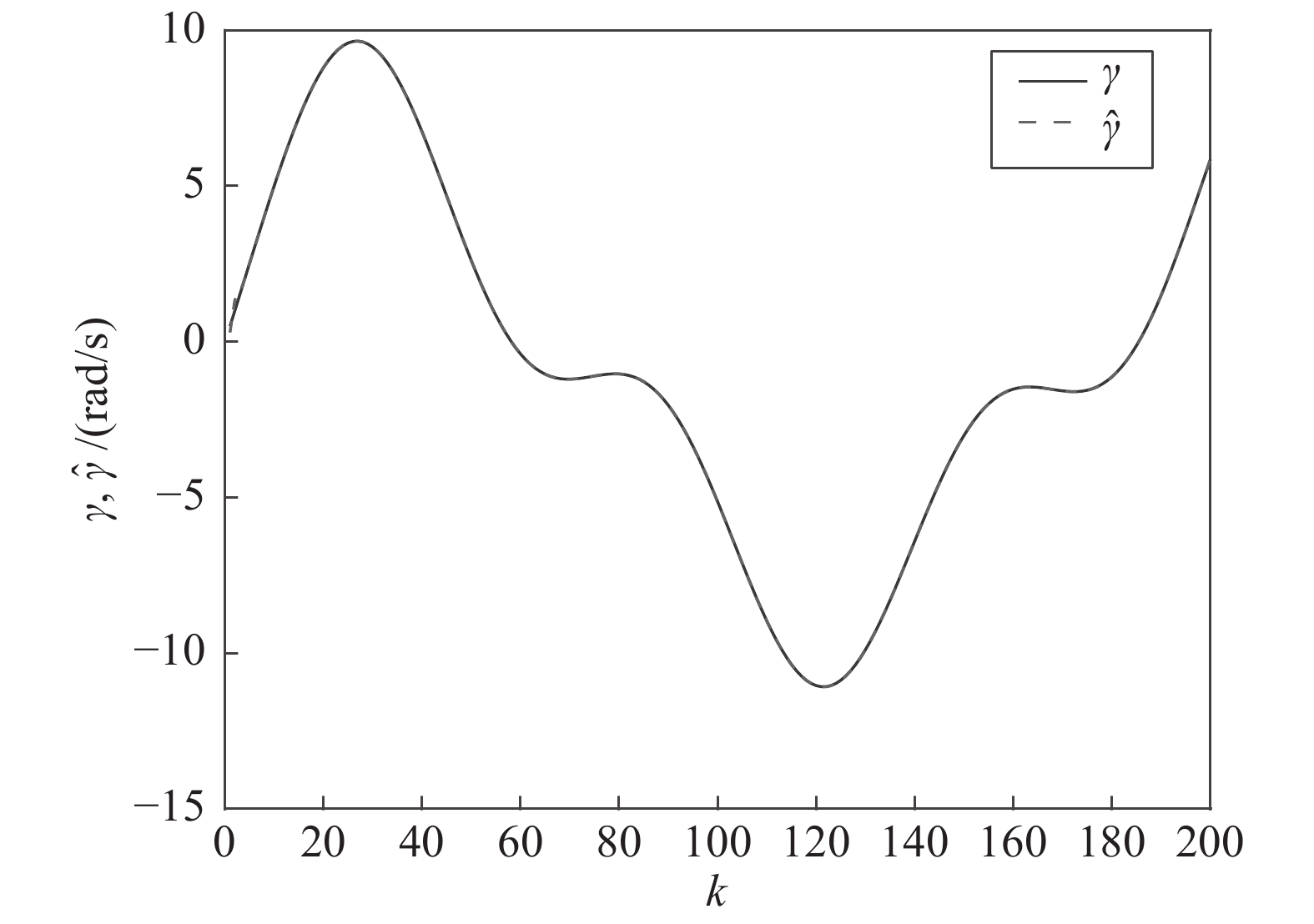
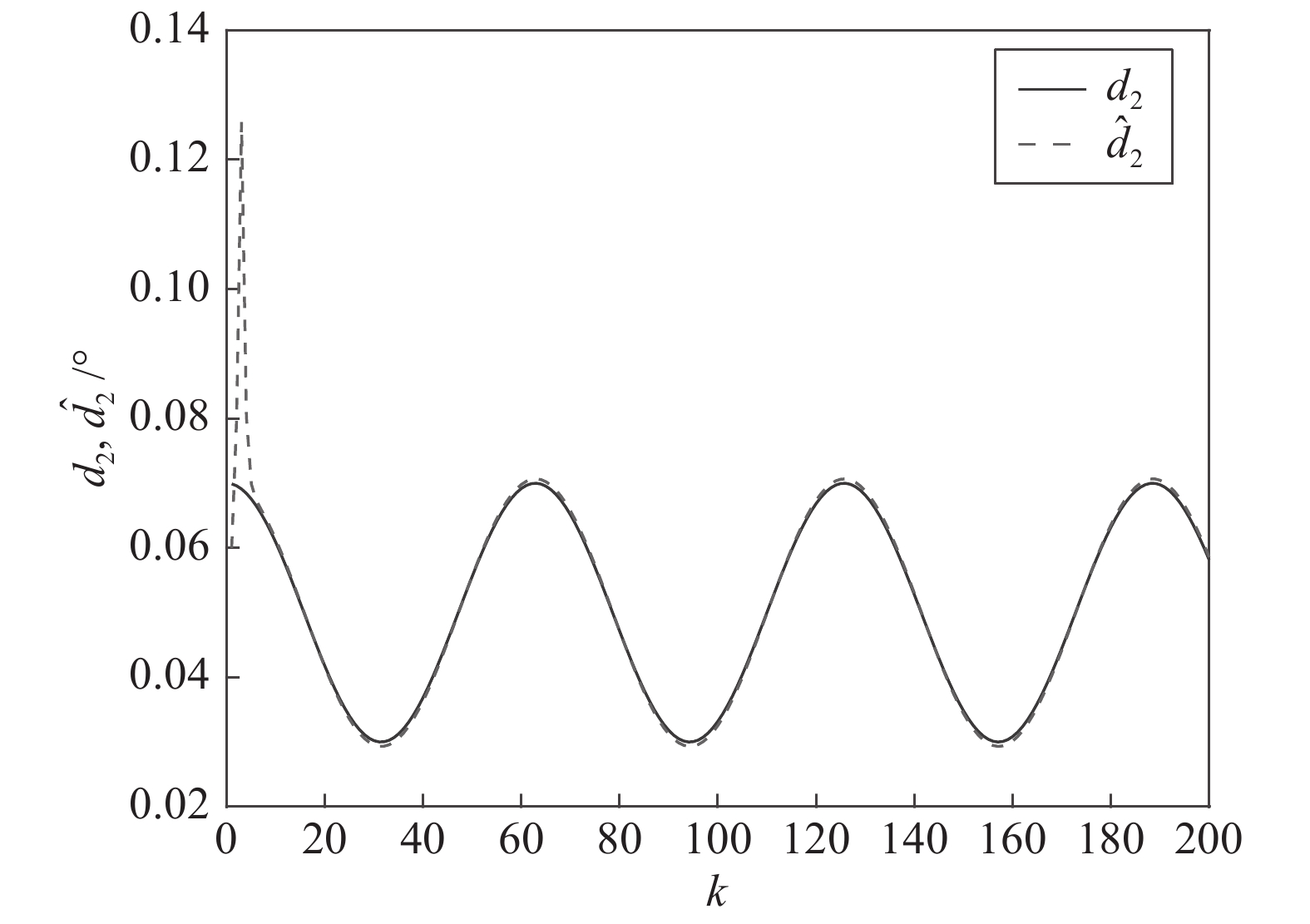
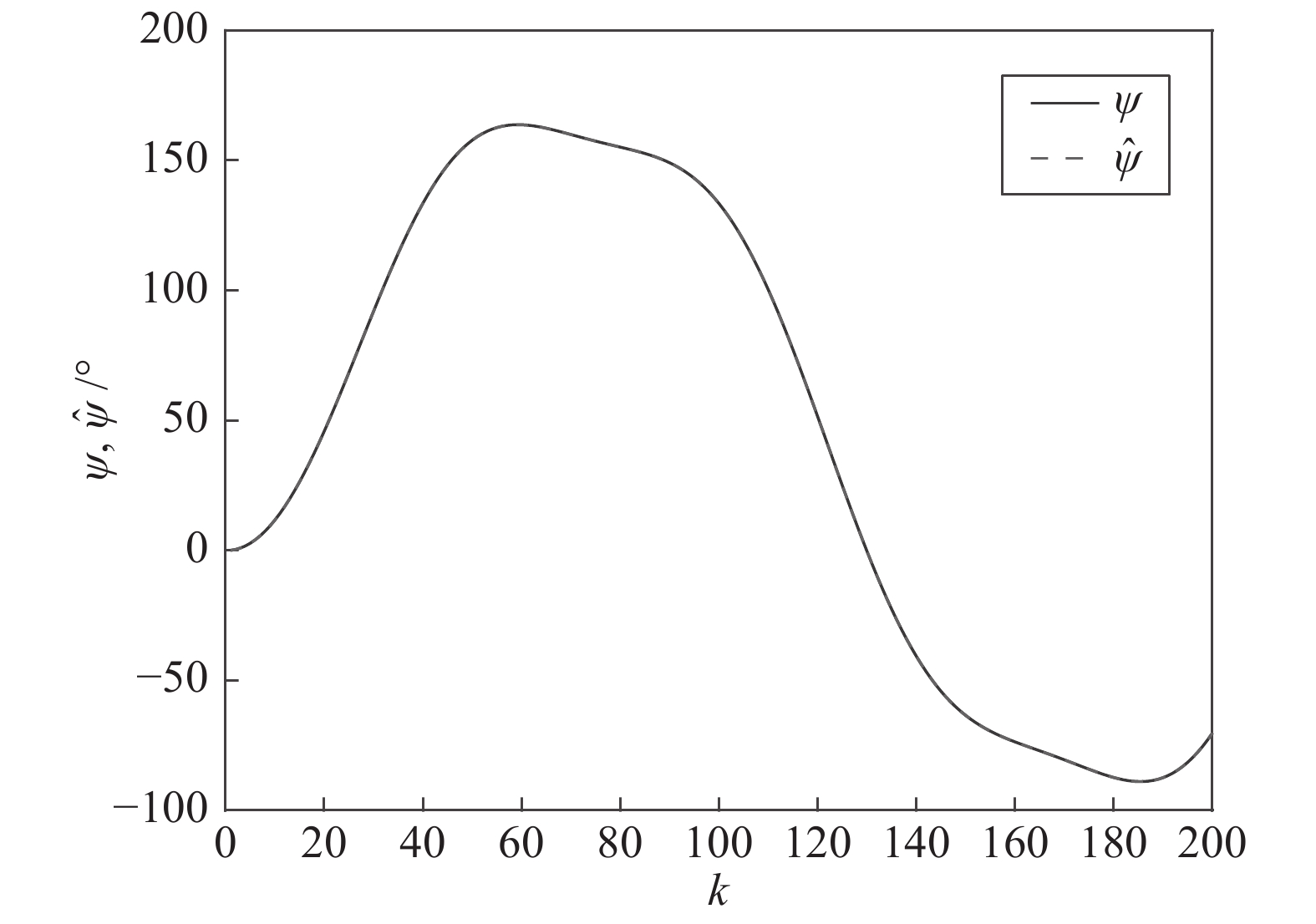
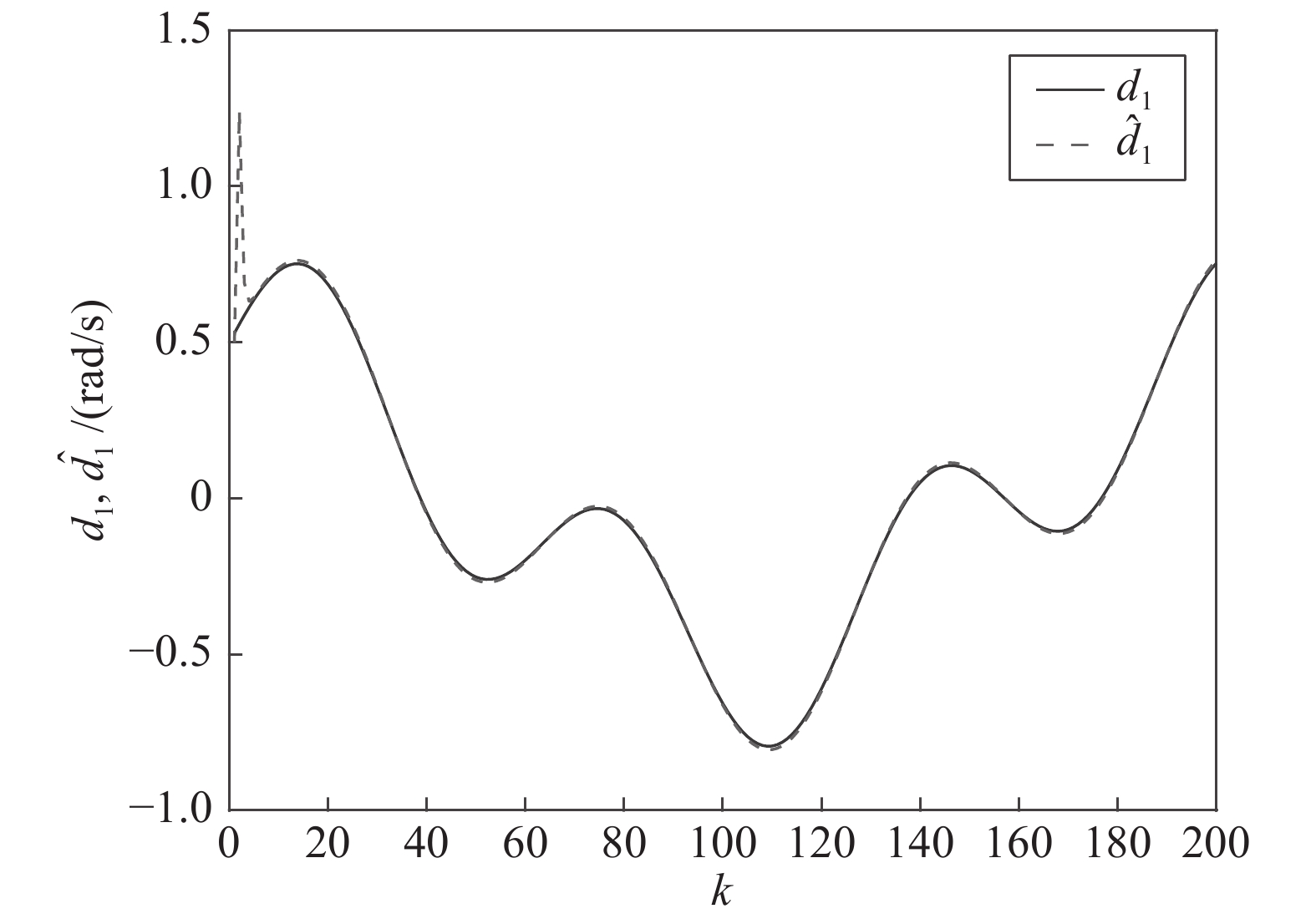
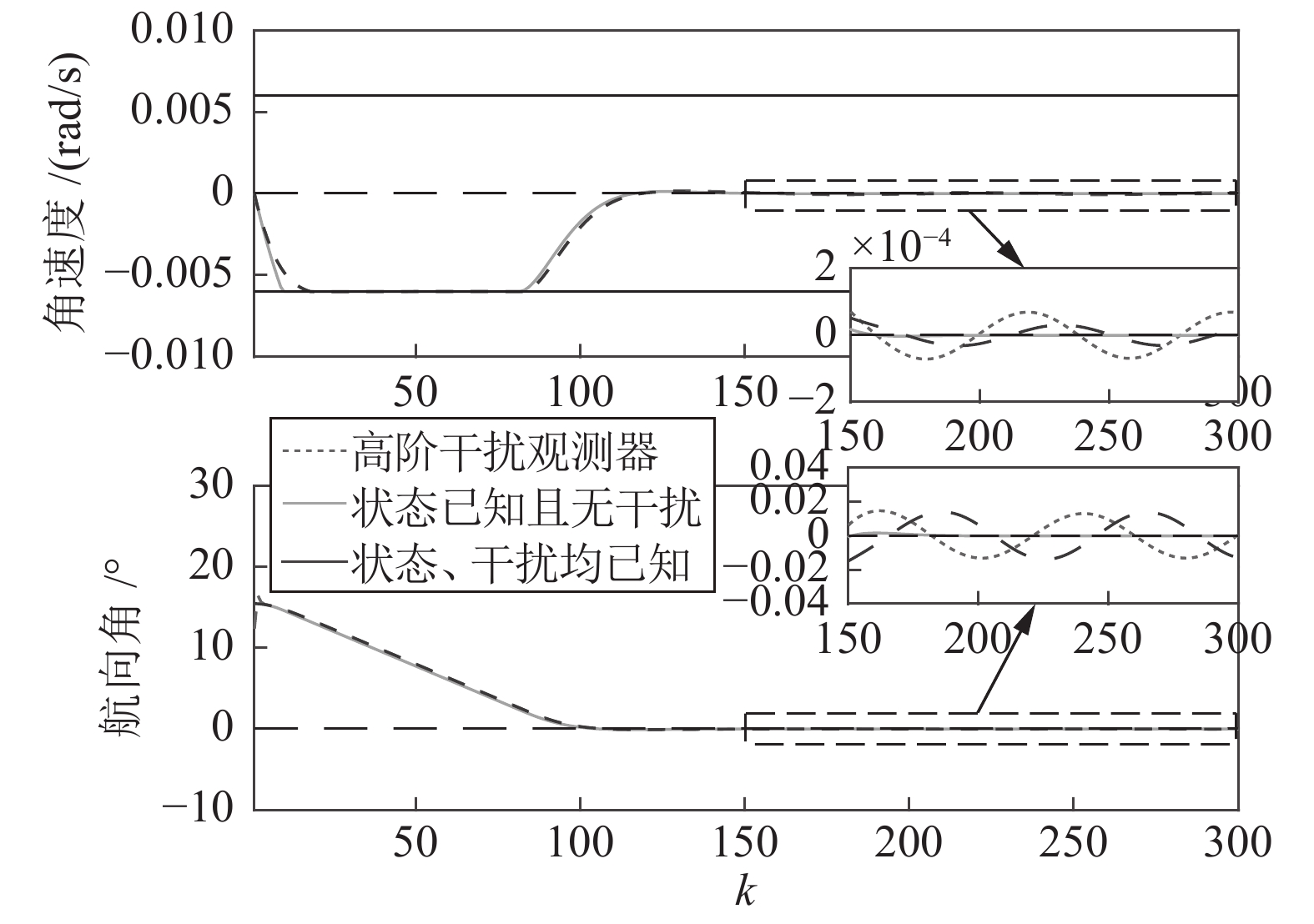
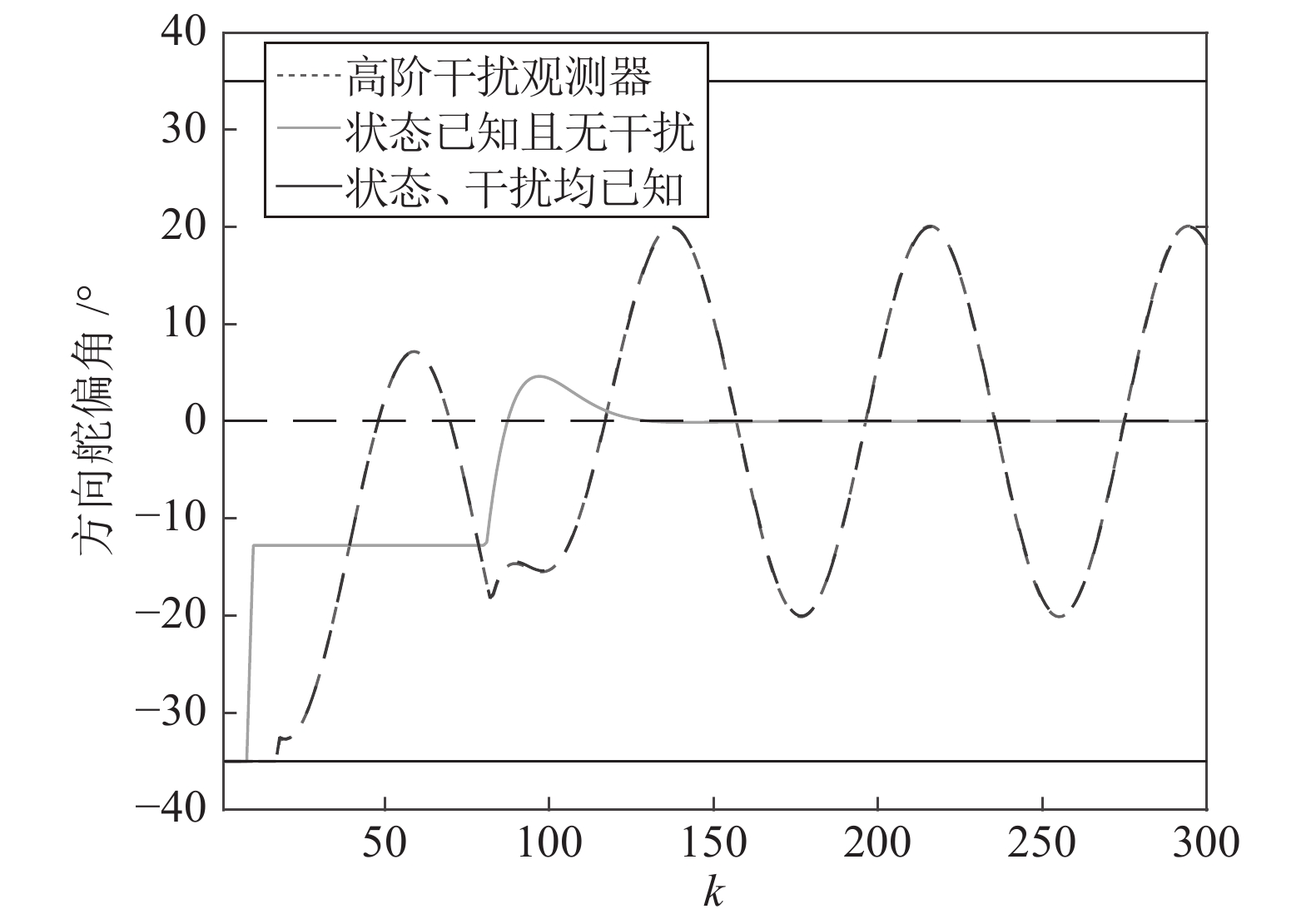
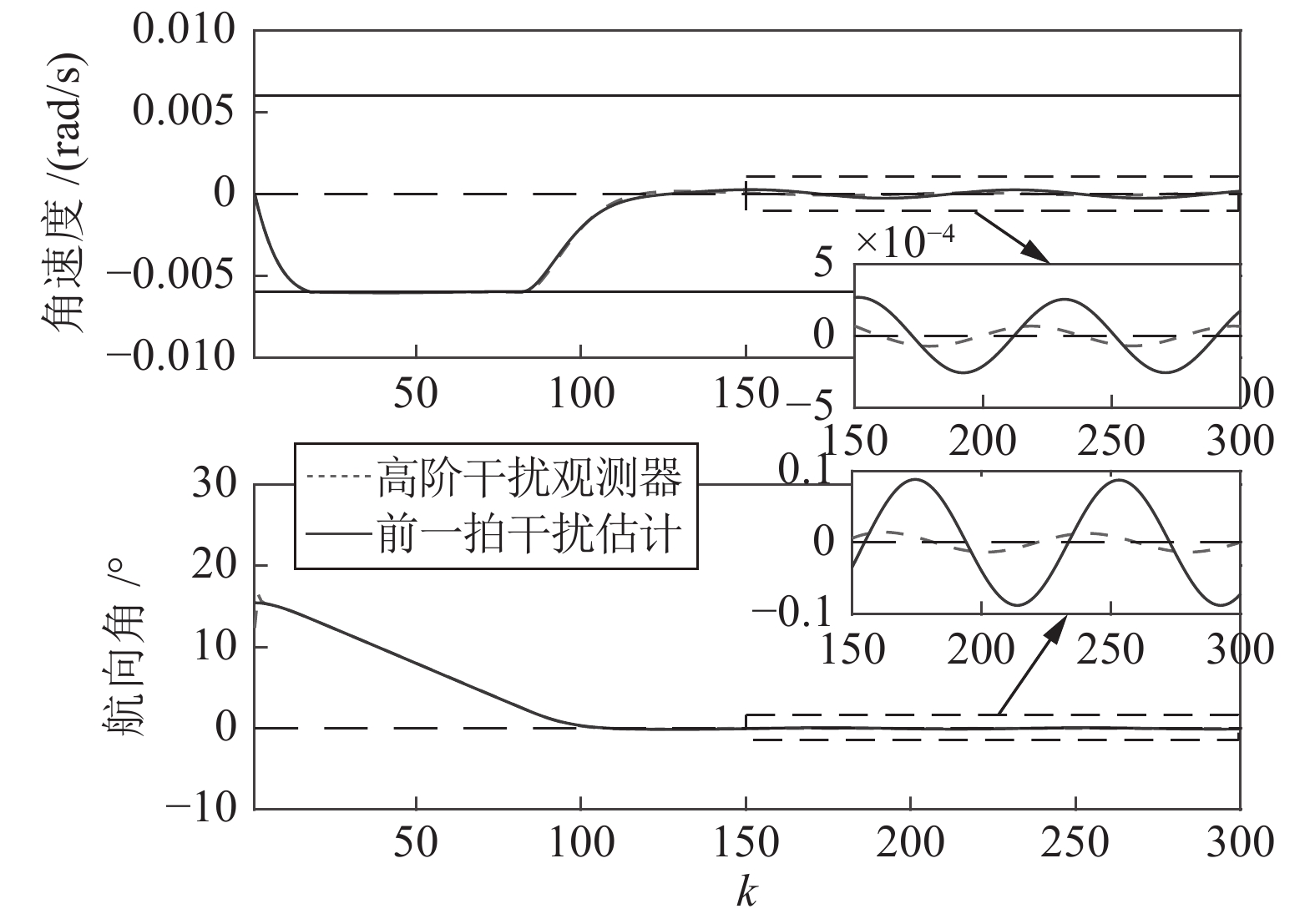
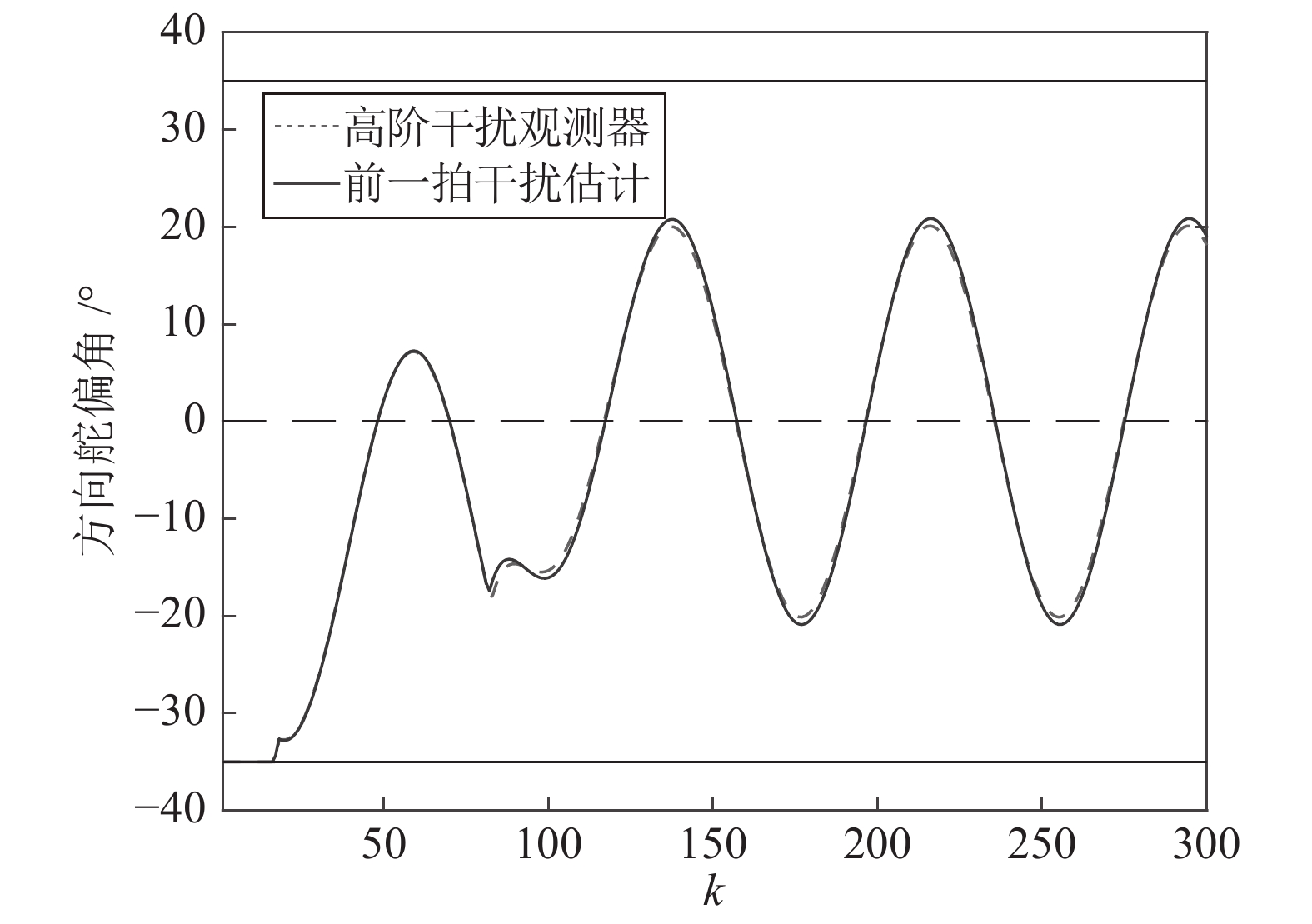
针对状态不可测、外部干扰未知, 并且状态和输入受限的离散时间线性系统, 将高阶观测器、干扰补偿控制与标准模型预测控制(Model predictive control, MPC)相结合, 提出了一种新的MPC方法. 首先利用高阶观测器同步观测未知状态和干扰, 使得观测误差一致有界收敛;然后基于该干扰估计值设计新的干扰补偿控制方法, 并将该方法与基于状态估计的标准MPC相结合, 实现上述系统的优化控制. 所提出的MPC方法克服了利用现有MPC方法求解具有外部干扰和状态约束的优化控制问题时存在无可行解的局限, 能够保证系统状态在每一时刻都满足约束条件, 并且使系统的输出响应接近采用标准MPC方法控制线性标称系统时得到的输出响应. 最后, 将所提控制方法应用到船舶航向控制系统中, 仿真结果表明了所提方法的有效性和优越性.
针对状态不可测、外部干扰未知, 并且状态和输入受限的离散时间线性系统, 将高阶观测器、干扰补偿控制与标准模型预测控制(Model predictive control, MPC)相结合, 提出了一种新的MPC方法. 首先利用高阶观测器同步观测未知状态和干扰, 使得观测误差一致有界收敛;然后基于该干扰估计值设计新的干扰补偿控制方法, 并将该方法与基于状态估计的标准MPC相结合, 实现上述系统的优化控制. 所提出的MPC方法克服了利用现有MPC方法求解具有外部干扰和状态约束的优化控制问题时存在无可行解的局限, 能够保证系统状态在每一时刻都满足约束条件, 并且使系统的输出响应接近采用标准MPC方法控制线性标称系统时得到的输出响应. 最后, 将所提控制方法应用到船舶航向控制系统中, 仿真结果表明了所提方法的有效性和优越性.
2020, 46(6): 1229-1239.
doi: 10.16383/j.aas.c180075
cstr: 32138.14.j.aas.c180075
摘要:
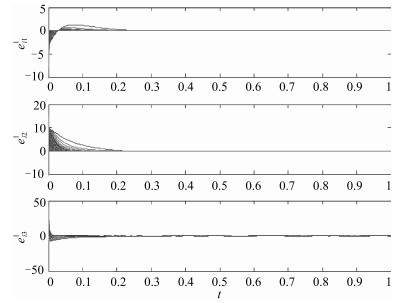
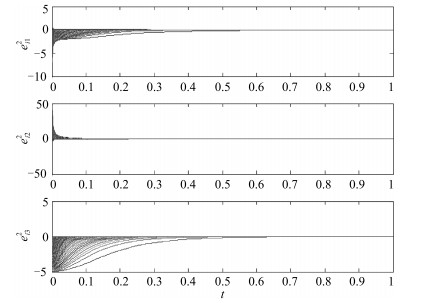
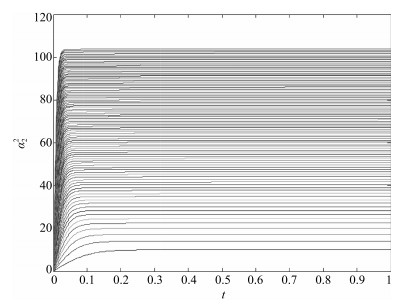
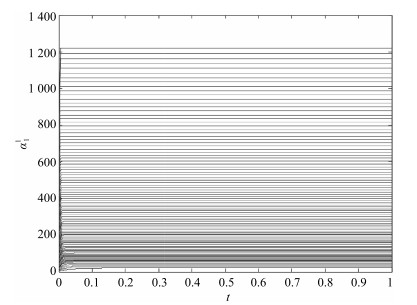
针对具有噪声的相互依存复杂动力网络, 本文研究了它的局部自适应H∞异质同步问题.该网络由两个具有"一对一"相互依赖关系的子网构成, 子网内部耦合和子网间的耦合均含有未知但有界的非线性函数.基于李雅普诺夫稳定性理论、线性矩阵不等式(Linear matrix inequality, LMI)技术和自适应以及H∞控制方法, 本文提出了使得相互依存网络在外部噪声的干扰下, 两个子网各自达到一致的充分条件.这些条件不仅可以保证受扰动的网络获得鲁棒渐近同步而且可以让网络达到一个给定的鲁棒H∞水平.最后的数值模拟验证了提出的方法的有效性以及可行性.
针对具有噪声的相互依存复杂动力网络, 本文研究了它的局部自适应H∞异质同步问题.该网络由两个具有"一对一"相互依赖关系的子网构成, 子网内部耦合和子网间的耦合均含有未知但有界的非线性函数.基于李雅普诺夫稳定性理论、线性矩阵不等式(Linear matrix inequality, LMI)技术和自适应以及H∞控制方法, 本文提出了使得相互依存网络在外部噪声的干扰下, 两个子网各自达到一致的充分条件.这些条件不仅可以保证受扰动的网络获得鲁棒渐近同步而且可以让网络达到一个给定的鲁棒H∞水平.最后的数值模拟验证了提出的方法的有效性以及可行性.


2020, 46(6): 1240-1254.
doi: 10.16383/j.aas.c180120
cstr: 32138.14.j.aas.c180120
摘要:
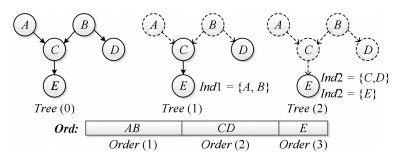
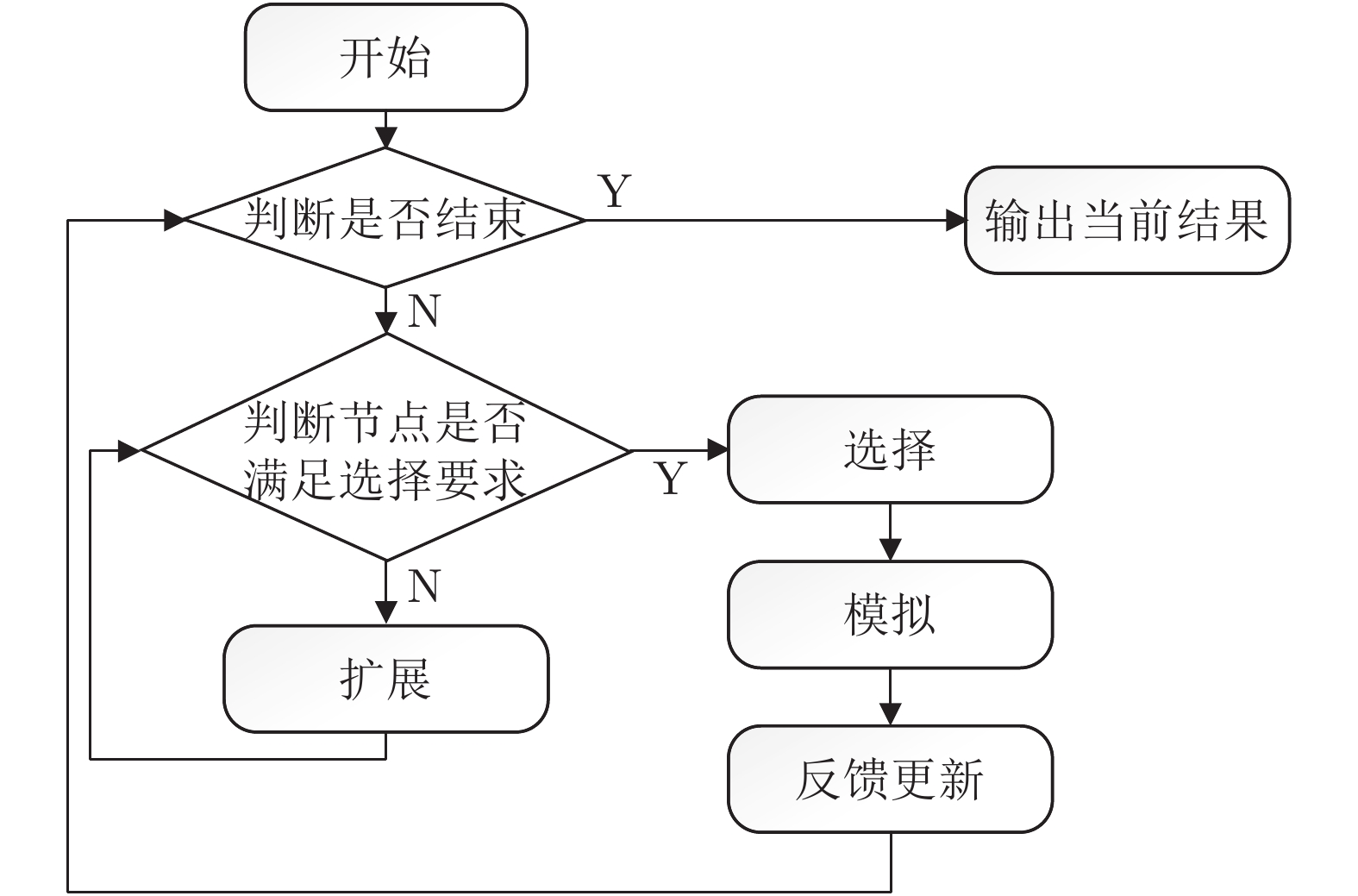
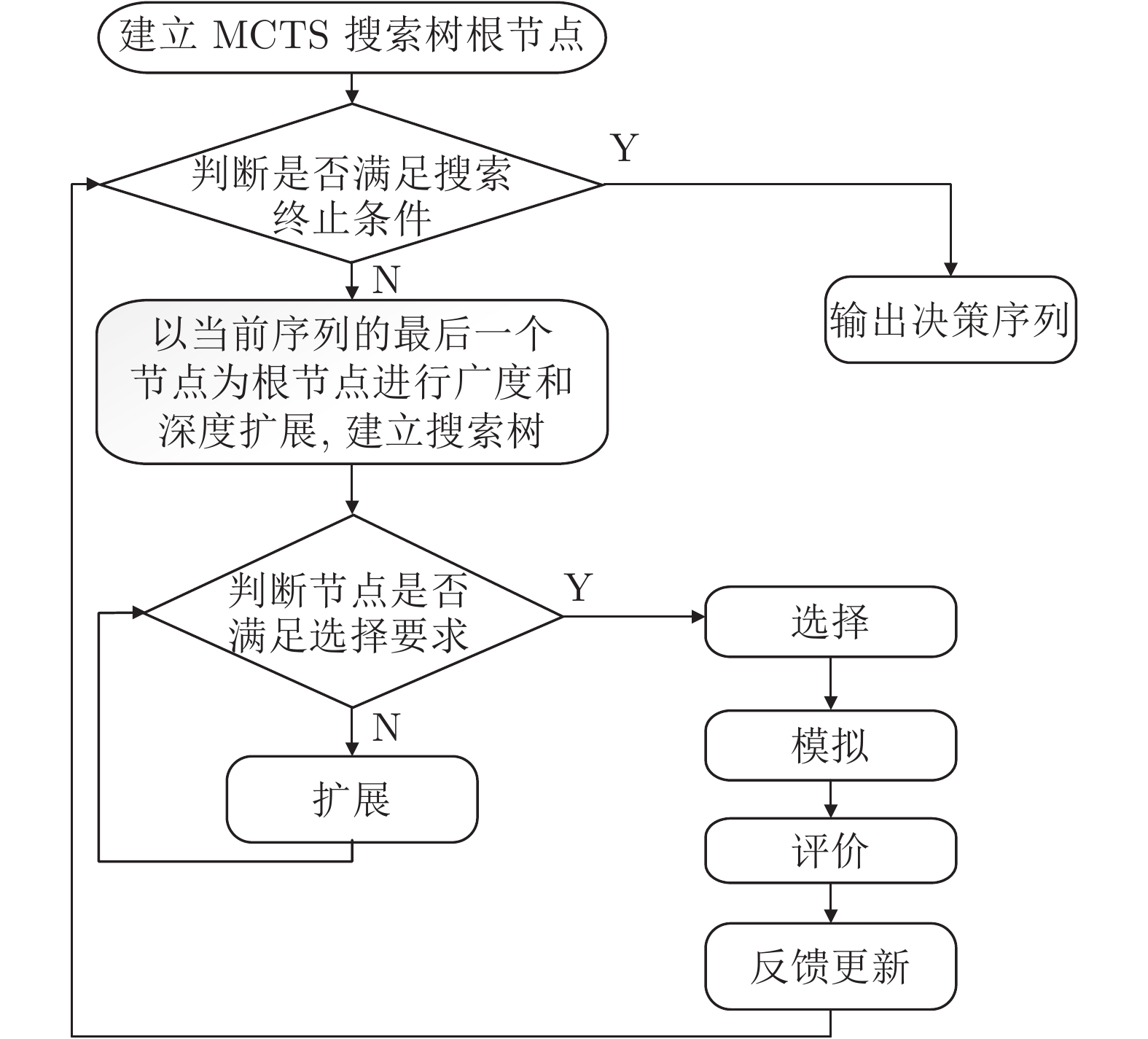
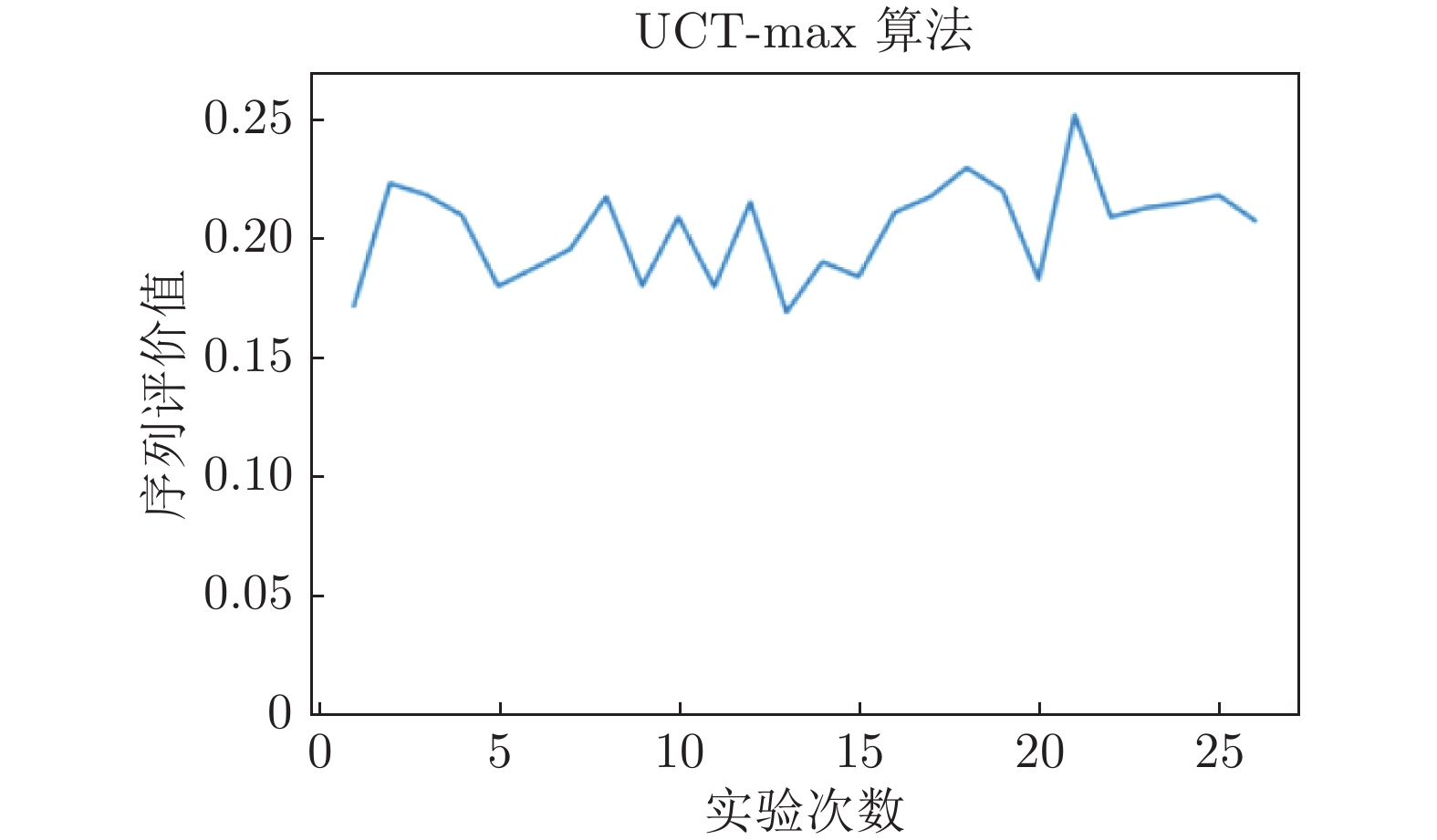
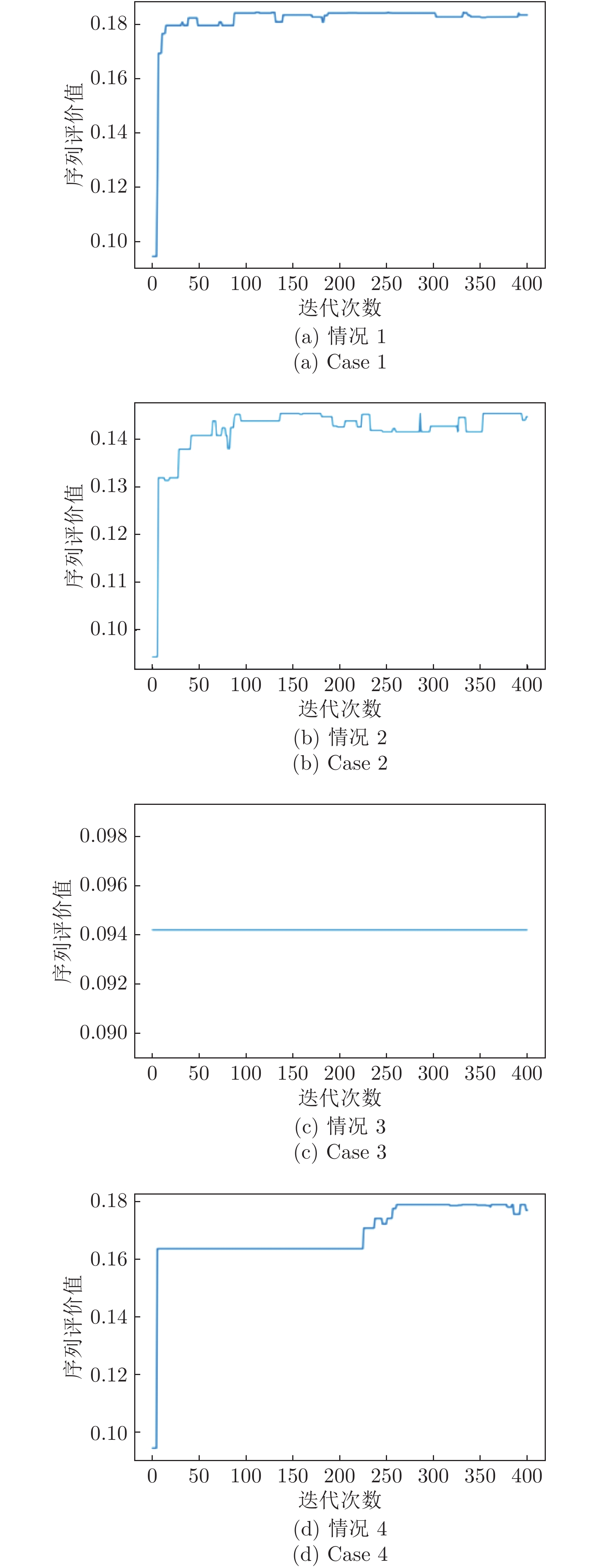
传统的序列决策方法旨在对决策过程与决策步骤进行建模, 以求解得到最优的决策序列. 然而, 序列决策建模过程对目标函数的确定性要求高, 且序列搜索的算法多以深度优先或广度优先等遍历搜索为主, 鲜有考虑搜索过程的随机性. 蒙特卡洛树搜索算法(Monte Carlo tree search, MCTS)虽然适合求解随机序列搜索问题, 但目前仅应用于博弈型搜索过程, 鲜有探讨需要专家参与的知识约束序列决策的搜索策略, 另外, 传统MCTS算法往往存在搜索范围过大、收敛不及时等问题. 为此, 提出一种融合群决策经验型知识和部分确定型决策序列片段的混合知识约束的MCTS 序列决策方法, 并给出了详细的求解流程. 最后, 将所提方法应用于一类中风后吞咽功能障碍针灸穴位排序方案制订问题, 给出了融合混合知识与MCTS的针灸排序方案设定方法, 并与其他方法进行对比, 验证了所提方法的可行性和有效性, 为年轻医师的针灸方案制订技能的标准化培训工作奠定了方法基础.
传统的序列决策方法旨在对决策过程与决策步骤进行建模, 以求解得到最优的决策序列. 然而, 序列决策建模过程对目标函数的确定性要求高, 且序列搜索的算法多以深度优先或广度优先等遍历搜索为主, 鲜有考虑搜索过程的随机性. 蒙特卡洛树搜索算法(Monte Carlo tree search, MCTS)虽然适合求解随机序列搜索问题, 但目前仅应用于博弈型搜索过程, 鲜有探讨需要专家参与的知识约束序列决策的搜索策略, 另外, 传统MCTS算法往往存在搜索范围过大、收敛不及时等问题. 为此, 提出一种融合群决策经验型知识和部分确定型决策序列片段的混合知识约束的MCTS 序列决策方法, 并给出了详细的求解流程. 最后, 将所提方法应用于一类中风后吞咽功能障碍针灸穴位排序方案制订问题, 给出了融合混合知识与MCTS的针灸排序方案设定方法, 并与其他方法进行对比, 验证了所提方法的可行性和有效性, 为年轻医师的针灸方案制订技能的标准化培训工作奠定了方法基础.


2020, 46(6): 1255-1263.
doi: 10.16383/j.aas.c170687
cstr: 32138.14.j.aas.c170687
摘要:
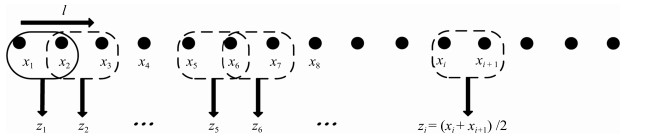
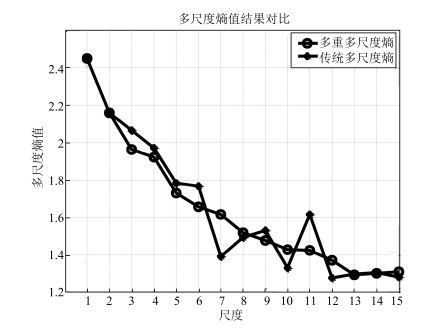
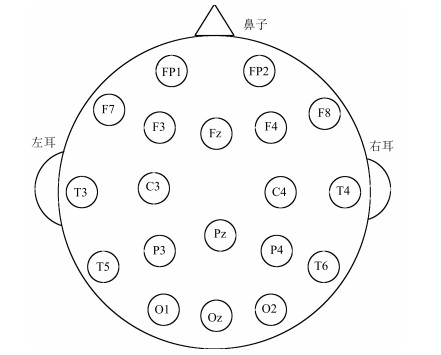
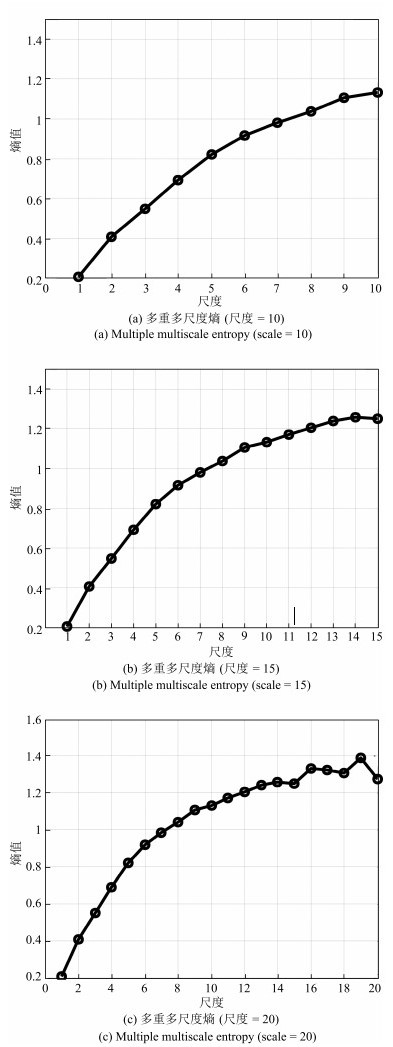
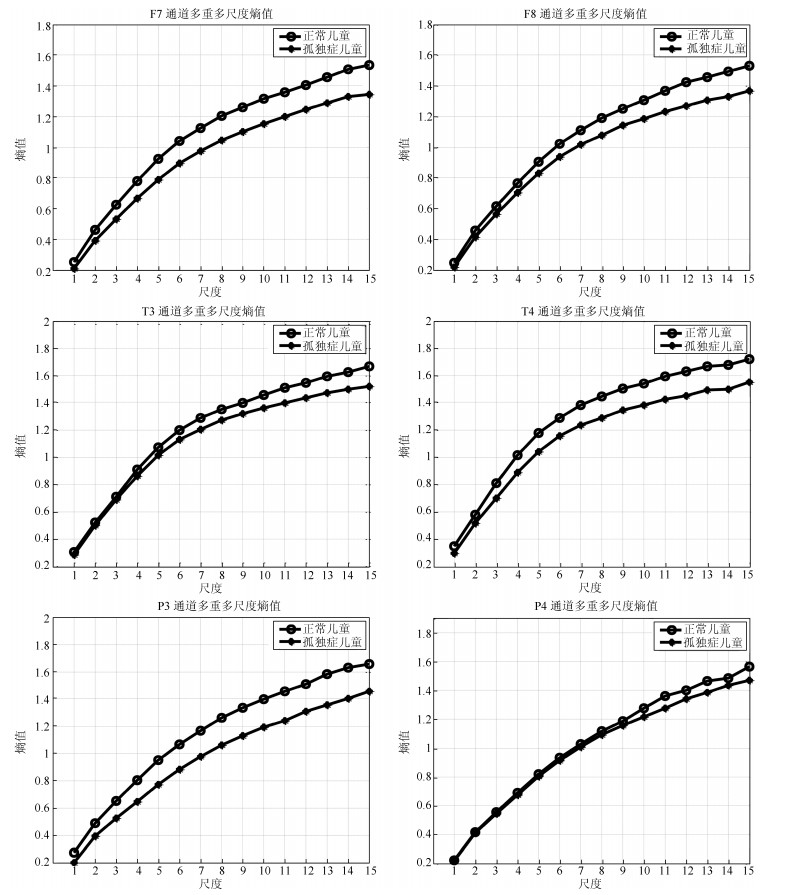
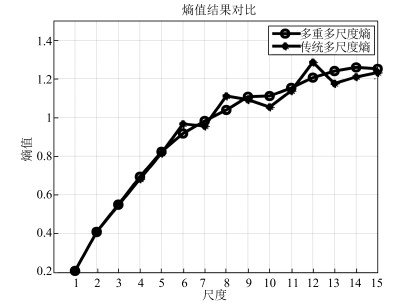
面向孤独症儿童脑功能状态评估问题, 提出一种多重多尺度熵脑电特征提取算法.算法针对传统多尺度熵信息丢失问题, 在移动均值粗粒化基础上, 采用延搁取值法构建多个尺度上的多重脑电信号序列, 再进一步计算各个尺度的样本熵.算法不仅克服了传统多尺度熵的信息丢失问题, 还能充分挖掘脑电信号的细节信息, 同时减小了尺度间的波动.基于该算法分析了16名孤独症儿童和16名正常儿童的19个通道的脑电信号.结果表明:正常儿童F7、F8、T4、P3通道的多重多尺度熵和复杂度均高于孤独症儿童, 且存在显著性差异(P < 0.05).表明前颞叶(F7、F8)可以作为孤独症儿童脑功能状态评估的敏感脑区, T4、P3可以作为辅助干预的敏感通道.
面向孤独症儿童脑功能状态评估问题, 提出一种多重多尺度熵脑电特征提取算法.算法针对传统多尺度熵信息丢失问题, 在移动均值粗粒化基础上, 采用延搁取值法构建多个尺度上的多重脑电信号序列, 再进一步计算各个尺度的样本熵.算法不仅克服了传统多尺度熵的信息丢失问题, 还能充分挖掘脑电信号的细节信息, 同时减小了尺度间的波动.基于该算法分析了16名孤独症儿童和16名正常儿童的19个通道的脑电信号.结果表明:正常儿童F7、F8、T4、P3通道的多重多尺度熵和复杂度均高于孤独症儿童, 且存在显著性差异(P < 0.05).表明前颞叶(F7、F8)可以作为孤独症儿童脑功能状态评估的敏感脑区, T4、P3可以作为辅助干预的敏感通道.



2020, 46(6): 1264-1273.
doi: 10.16383/j.aas.c180103
cstr: 32138.14.j.aas.c180103
摘要:
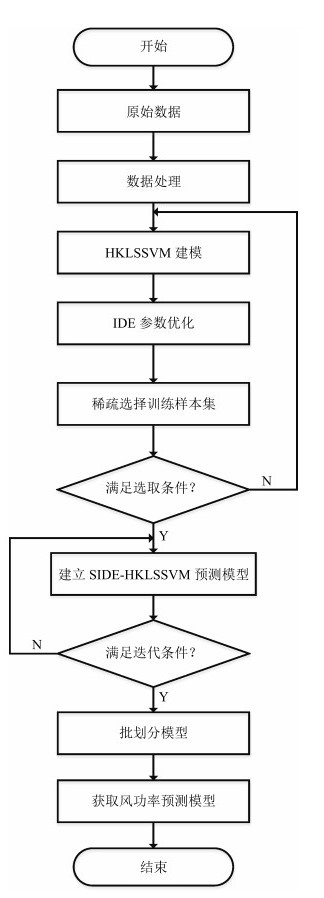
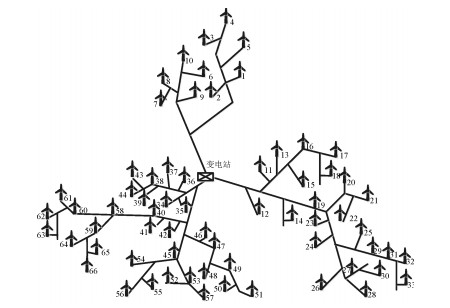
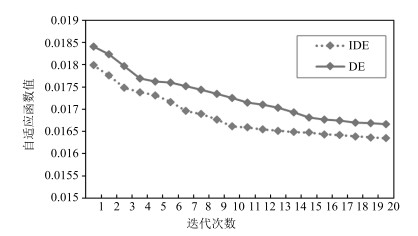
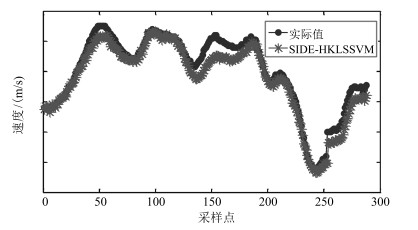
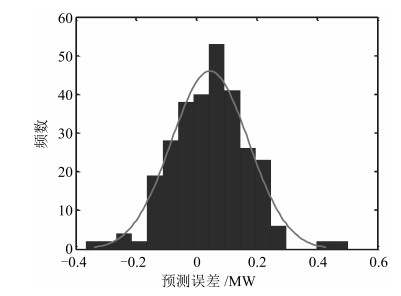
针对风电场风功率预测问题, 利用历史风功率、气象数据和测风塔实时数据等相关信息, 提出了带有批特征的混核最小二乘支持向量机(Hybrid kernel least squares support vector machine, HKLSSVM)方法, 建立风电场风功率预测模型.为了增强模型的适应性, 设计改进的差分进化算法对模型参数进行优化, 并利用稀疏选择方法来选取合适的训练样本集, 缩短建模时间, 保证预测模型精度.根据风场风机的地理位置分布情况, 提出批划分的建模策略, 对相近地理位置的风机进行组批, 替代传统风场风功率预测方法.通过风场中实际数据进行测试, 实验结果表明与其他预测方法相比, 本文提出的方法能够提高预测精度和效率, 减少风电波动性对电网的影响, 从而提高电网的安全性和可靠性.
针对风电场风功率预测问题, 利用历史风功率、气象数据和测风塔实时数据等相关信息, 提出了带有批特征的混核最小二乘支持向量机(Hybrid kernel least squares support vector machine, HKLSSVM)方法, 建立风电场风功率预测模型.为了增强模型的适应性, 设计改进的差分进化算法对模型参数进行优化, 并利用稀疏选择方法来选取合适的训练样本集, 缩短建模时间, 保证预测模型精度.根据风场风机的地理位置分布情况, 提出批划分的建模策略, 对相近地理位置的风机进行组批, 替代传统风场风功率预测方法.通过风场中实际数据进行测试, 实验结果表明与其他预测方法相比, 本文提出的方法能够提高预测精度和效率, 减少风电波动性对电网的影响, 从而提高电网的安全性和可靠性.



2020, 46(6): 1274-1282.
doi: 10.16383/j.aas.2018.c170596
cstr: 32138.14.j.aas.2018.c170596
摘要:
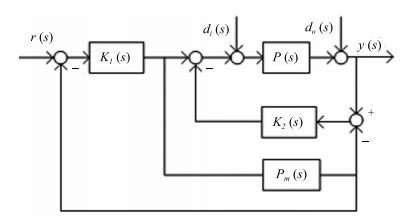
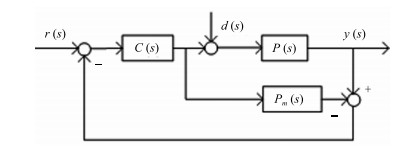
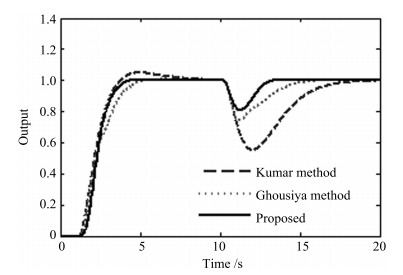
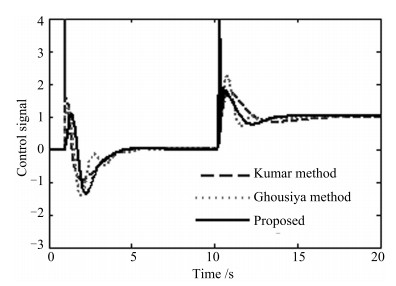
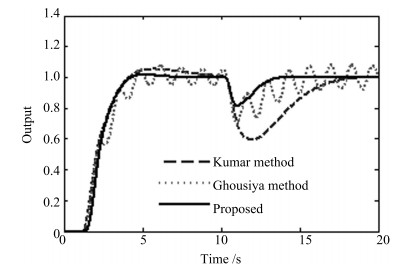
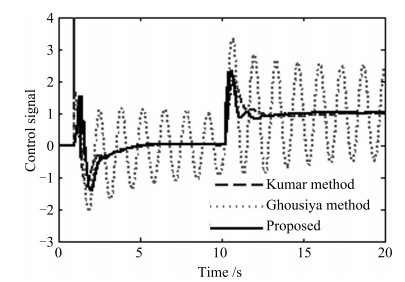
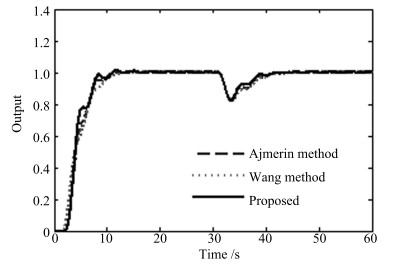
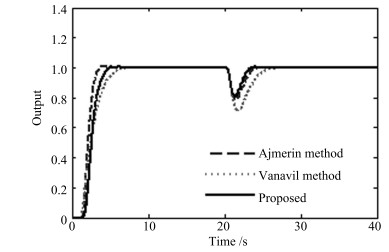
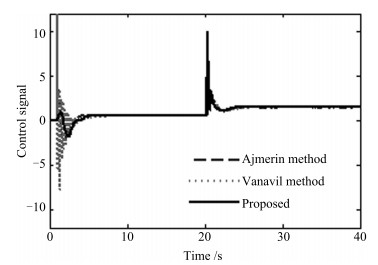
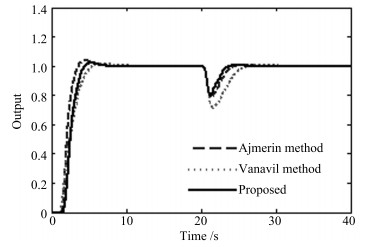
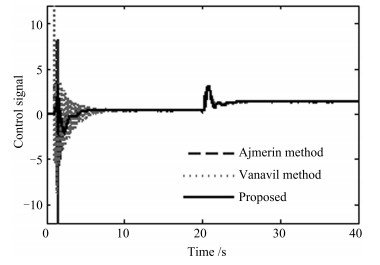
针对工业过程中的二阶不稳定时滞过程, 基于改进史密斯预估控制结构提出了一种简单的两自由度控制方案.设定值跟踪控制器和扰动抑制控制器采用同一设计程序, 并基于内模控制原理提出了控制器解析设计方案.设定值跟踪控制器和抗扰动控制器可分别通过单性能参数独立调节和优化, 每个控制器都具有PID形式, 给出了控制器调整参数的选择范围和扰动抑制闭环保证鲁棒稳定性的条件.仿真实例验证了提出方法对于近期其他方法的优越性.
针对工业过程中的二阶不稳定时滞过程, 基于改进史密斯预估控制结构提出了一种简单的两自由度控制方案.设定值跟踪控制器和扰动抑制控制器采用同一设计程序, 并基于内模控制原理提出了控制器解析设计方案.设定值跟踪控制器和抗扰动控制器可分别通过单性能参数独立调节和优化, 每个控制器都具有PID形式, 给出了控制器调整参数的选择范围和扰动抑制闭环保证鲁棒稳定性的条件.仿真实例验证了提出方法对于近期其他方法的优越性.


2020, 46(6): 1283-1290.
doi: 10.16383/j.aas.c190018
cstr: 32138.14.j.aas.c190018
摘要:
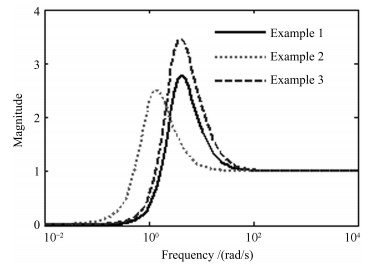
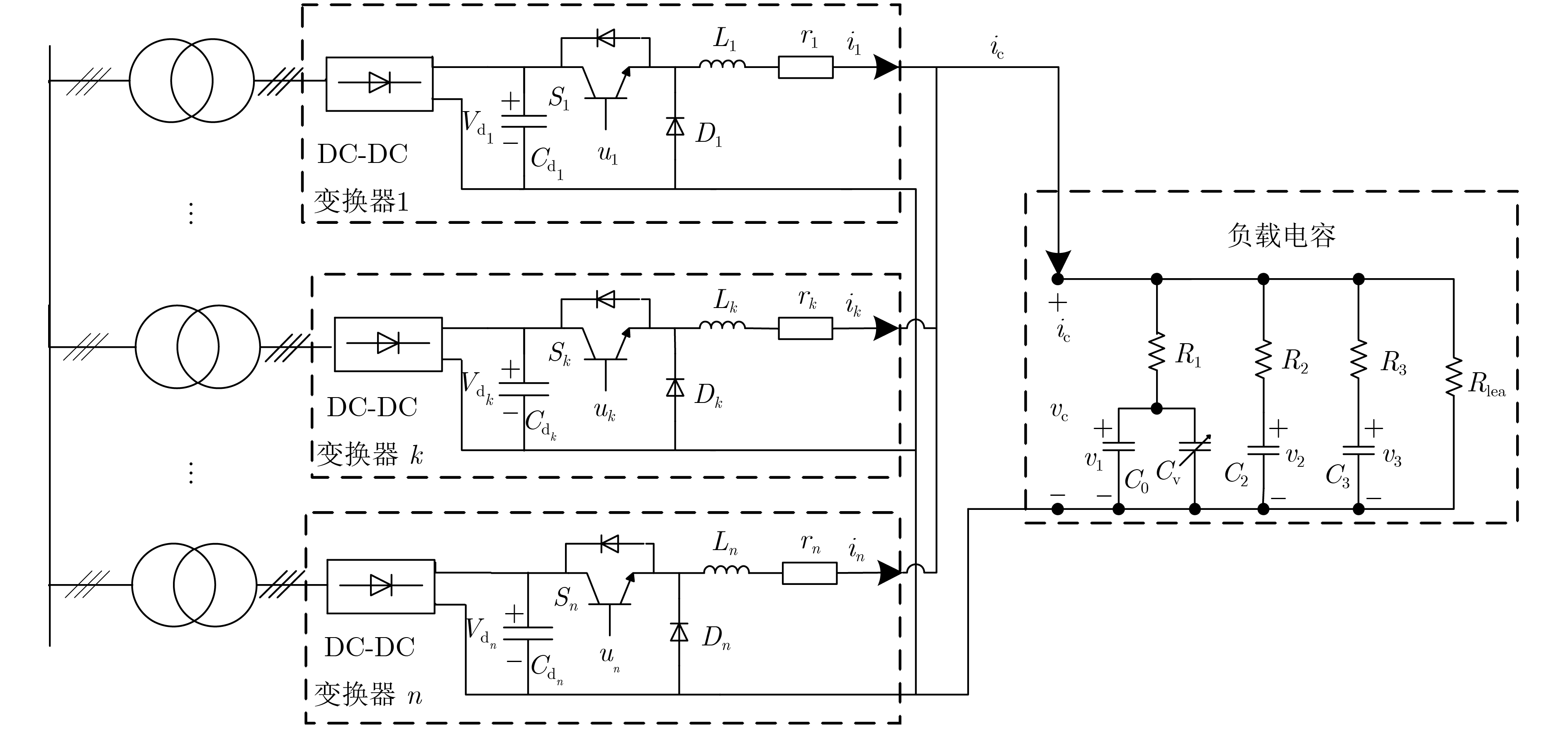
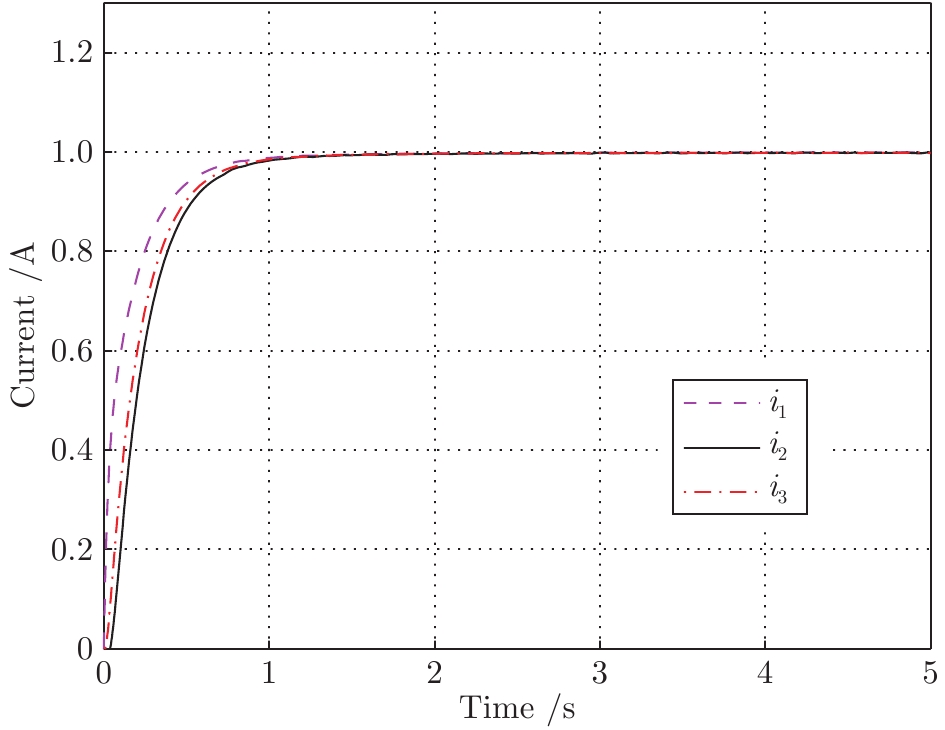
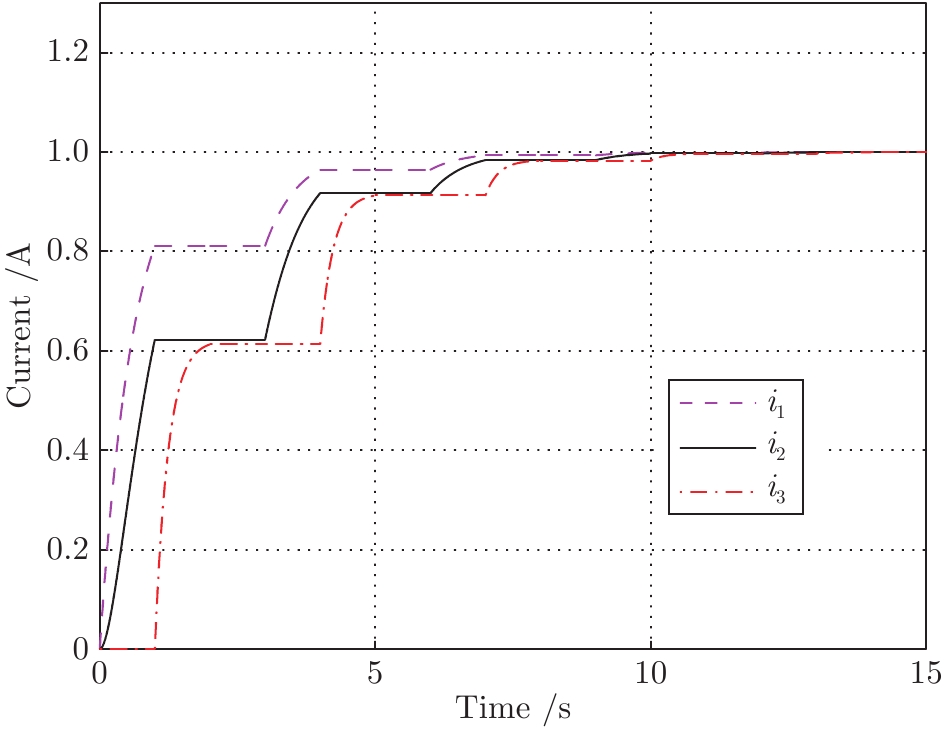
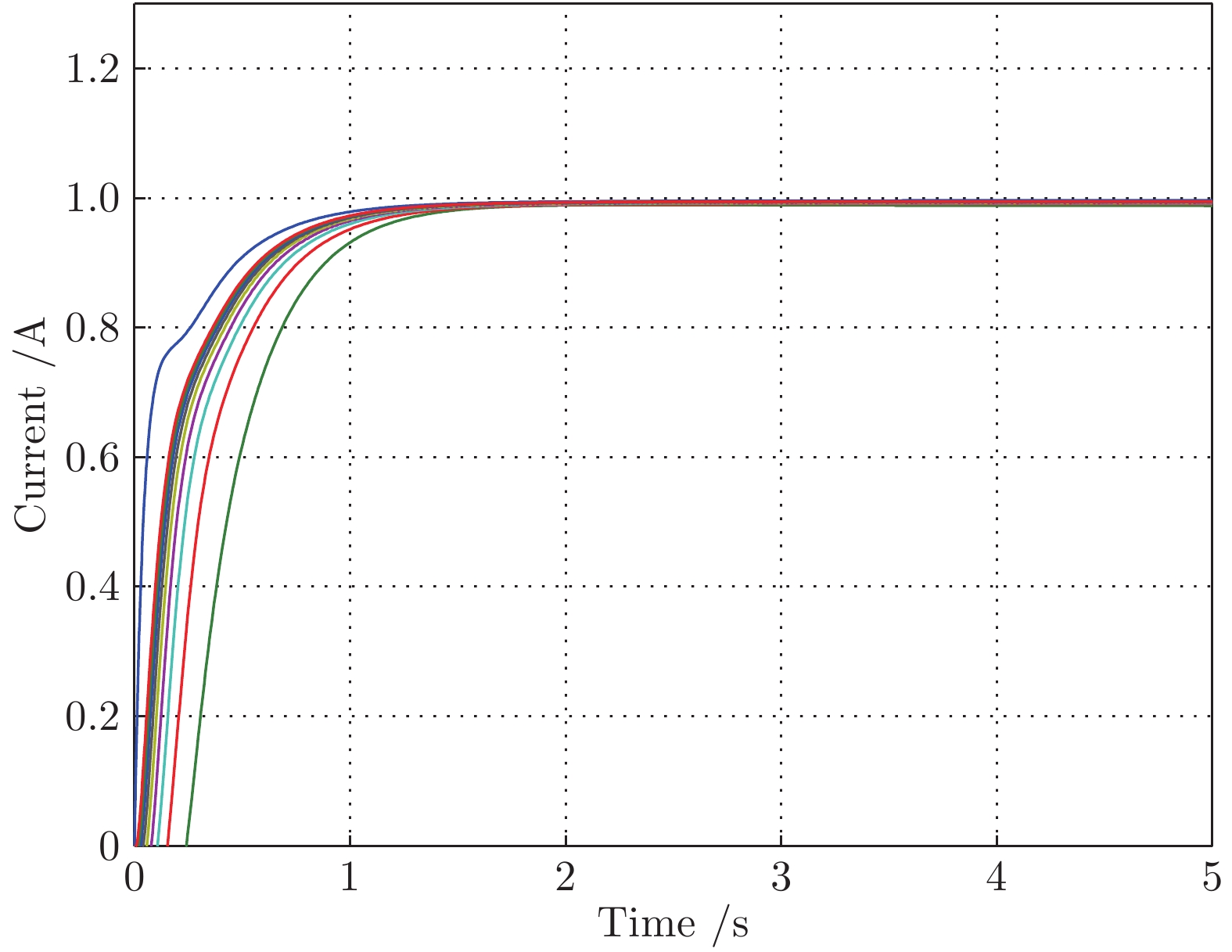
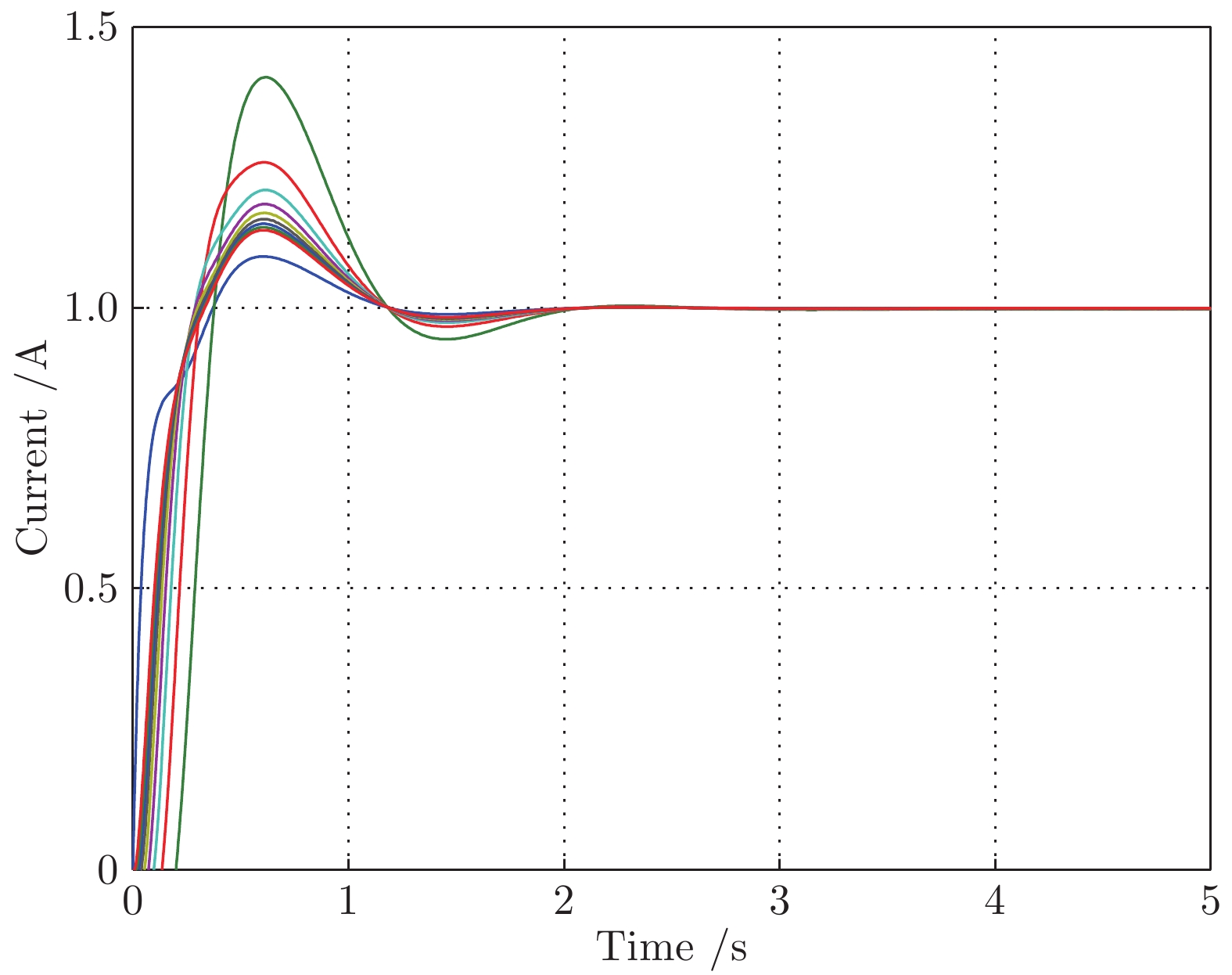
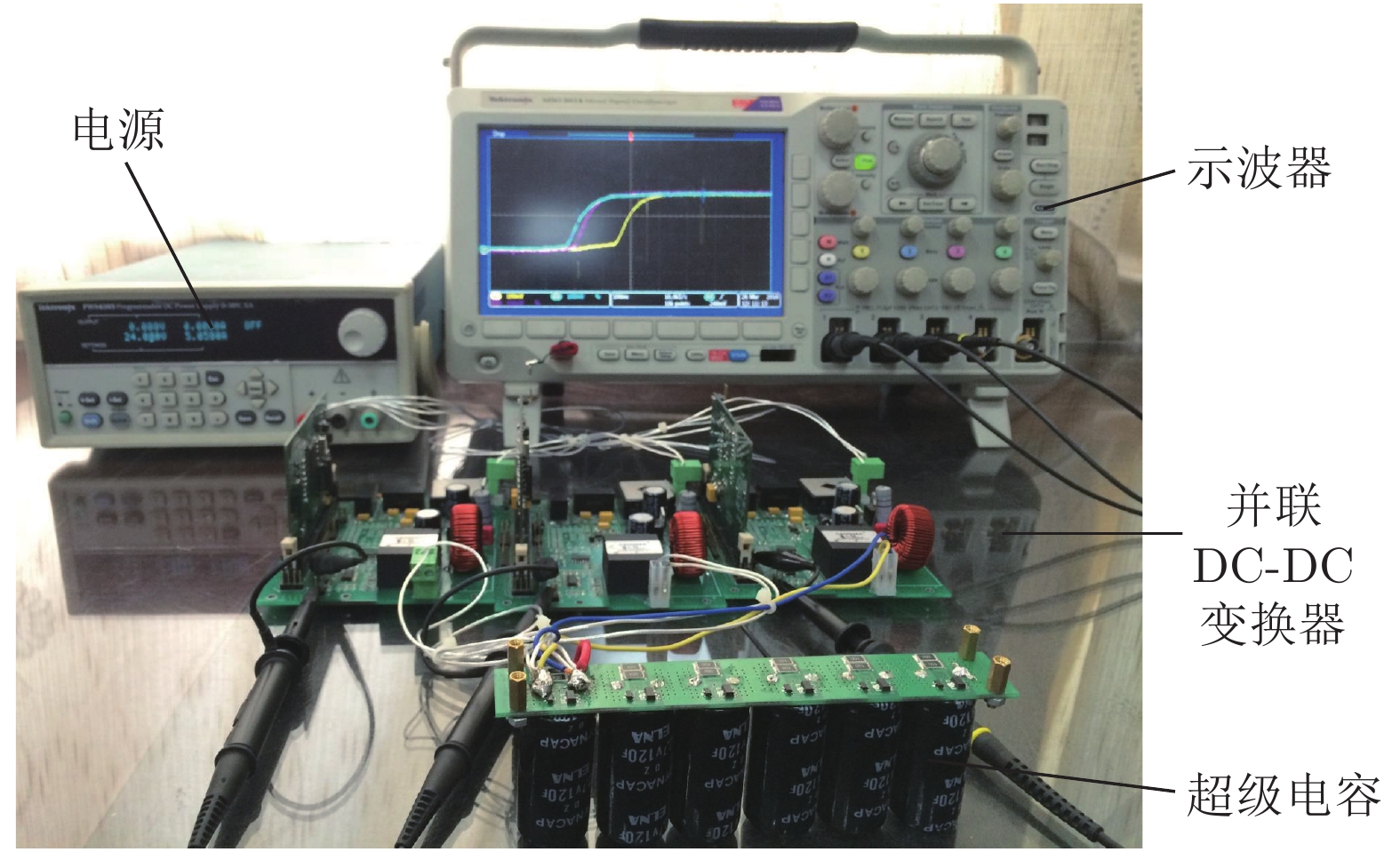
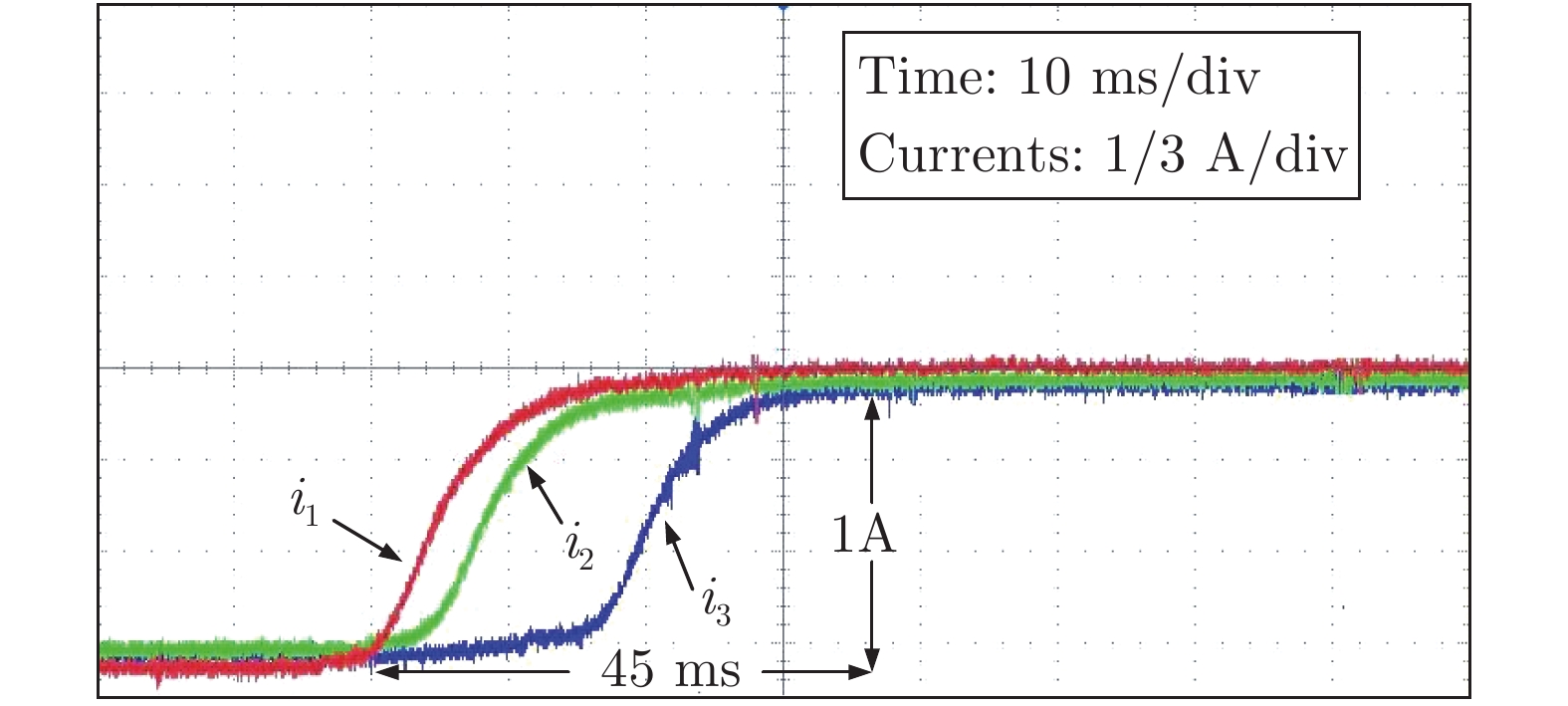
针对一类具有容性负载的直流微电网系统, 提出了分布式协同控制方法. 具有容性负载的直流微电网是一类耦合动态互联非线性网络化系统, 可将DC-DC变换器在信息层视为智能体, 在每个子系统模块中, 引入容性负载电压观测器, 耦合并联非线性系统负载均衡控制设计问题可解耦成一阶积分器多智能体系统的输出一致性跟踪问题. 基于最近邻原则, 通过在控制器中引入比例、积分环节, 设计了增益可调的分布式协同PI控制律, 当有向图满足至少含有一棵生成树的条件下, 通过子系统间的局部交互, 可以实现负载均衡的目标. 通过分析增广系统矩阵的特征值证明了整个闭环系统的稳定性. 仿真和实验说明了所提出的控制方法的有效性及可行性.
针对一类具有容性负载的直流微电网系统, 提出了分布式协同控制方法. 具有容性负载的直流微电网是一类耦合动态互联非线性网络化系统, 可将DC-DC变换器在信息层视为智能体, 在每个子系统模块中, 引入容性负载电压观测器, 耦合并联非线性系统负载均衡控制设计问题可解耦成一阶积分器多智能体系统的输出一致性跟踪问题. 基于最近邻原则, 通过在控制器中引入比例、积分环节, 设计了增益可调的分布式协同PI控制律, 当有向图满足至少含有一棵生成树的条件下, 通过子系统间的局部交互, 可以实现负载均衡的目标. 通过分析增广系统矩阵的特征值证明了整个闭环系统的稳定性. 仿真和实验说明了所提出的控制方法的有效性及可行性.


2020, 46(6): 1291-1300.
doi: 10.16383/j.aas.c180122
cstr: 32138.14.j.aas.c180122
摘要:
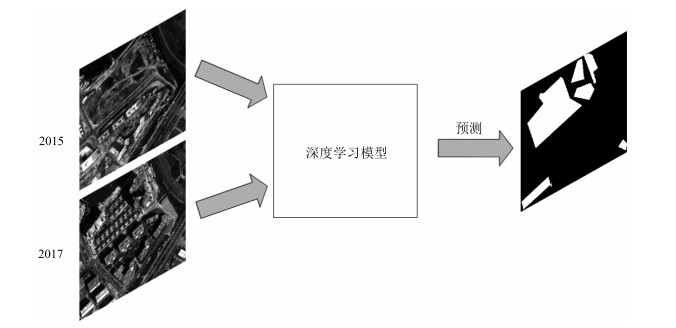
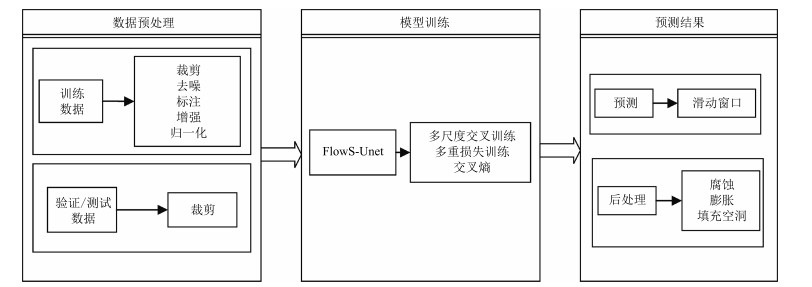
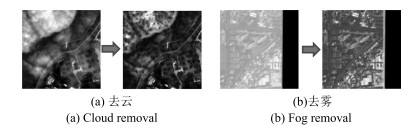
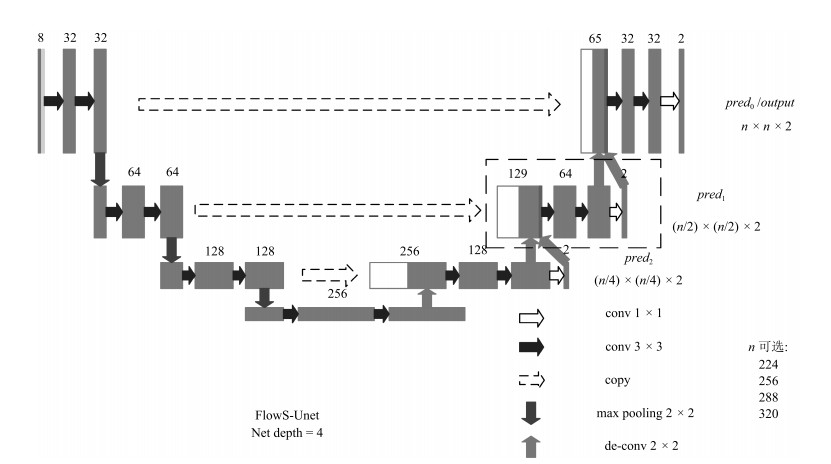
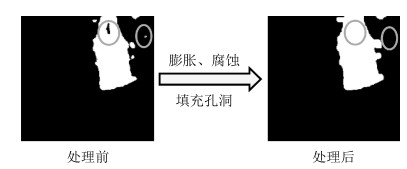
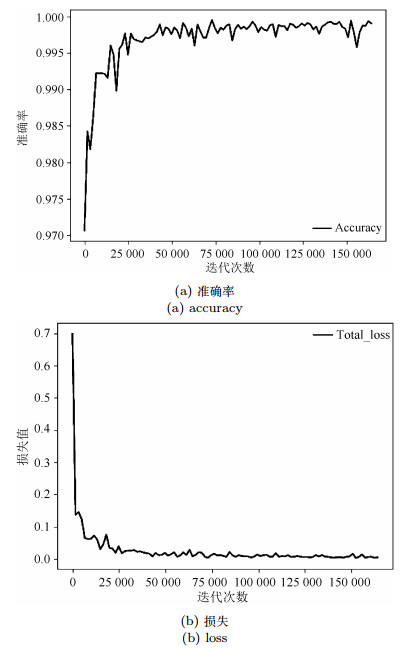
针对目前人为探察土地资源利用情况的任务繁重、办事效率低下等问题, 提出了一种基于深度卷积神经网络的建筑物变化检测方法, 利用高分辨率遥感图像实时检测每个区域新建与扩建的建筑物, 以方便对土地资源进行有效管理.本文受超列(Hypercolumn)和FlowNet中的细化(Refinement)结构启发, 将细化和其他改进应用到U-Net, 提出FlowS-Unet网络.首先对遥感图像裁剪、去噪、标注语义制作数据集, 将该数据集划分为训练集和测试集, 对训练集进行数据增强, 并根据训练集图像的均值和方差对所有图像进行归一化; 然后将训练集输入集成了多尺度交叉训练、多重损失计算、Adam优化的全卷积神经网络FlowS-Unet中进行训练; 最后对网络模型的预测结果进行膨胀、腐蚀以及孔洞填充等后处理得到最终的分割结果.本文以人工分割结果为参考标准进行对比测试, 用FlowS-Unet检测得到的F1分数高达0.943, 明显优于FCN和U-Net的预测结果.实验结果表明, FlowS-Unet能够实时准确地将新建与扩建的建筑物变化检测出来, 并且该模型也可扩展到其他类似的图像检测问题中.
针对目前人为探察土地资源利用情况的任务繁重、办事效率低下等问题, 提出了一种基于深度卷积神经网络的建筑物变化检测方法, 利用高分辨率遥感图像实时检测每个区域新建与扩建的建筑物, 以方便对土地资源进行有效管理.本文受超列(Hypercolumn)和FlowNet中的细化(Refinement)结构启发, 将细化和其他改进应用到U-Net, 提出FlowS-Unet网络.首先对遥感图像裁剪、去噪、标注语义制作数据集, 将该数据集划分为训练集和测试集, 对训练集进行数据增强, 并根据训练集图像的均值和方差对所有图像进行归一化; 然后将训练集输入集成了多尺度交叉训练、多重损失计算、Adam优化的全卷积神经网络FlowS-Unet中进行训练; 最后对网络模型的预测结果进行膨胀、腐蚀以及孔洞填充等后处理得到最终的分割结果.本文以人工分割结果为参考标准进行对比测试, 用FlowS-Unet检测得到的F1分数高达0.943, 明显优于FCN和U-Net的预测结果.实验结果表明, FlowS-Unet能够实时准确地将新建与扩建的建筑物变化检测出来, 并且该模型也可扩展到其他类似的图像检测问题中.