

Distributed Cooperative Control of DC Micro-Grid Systems With Capacitive Loads
-
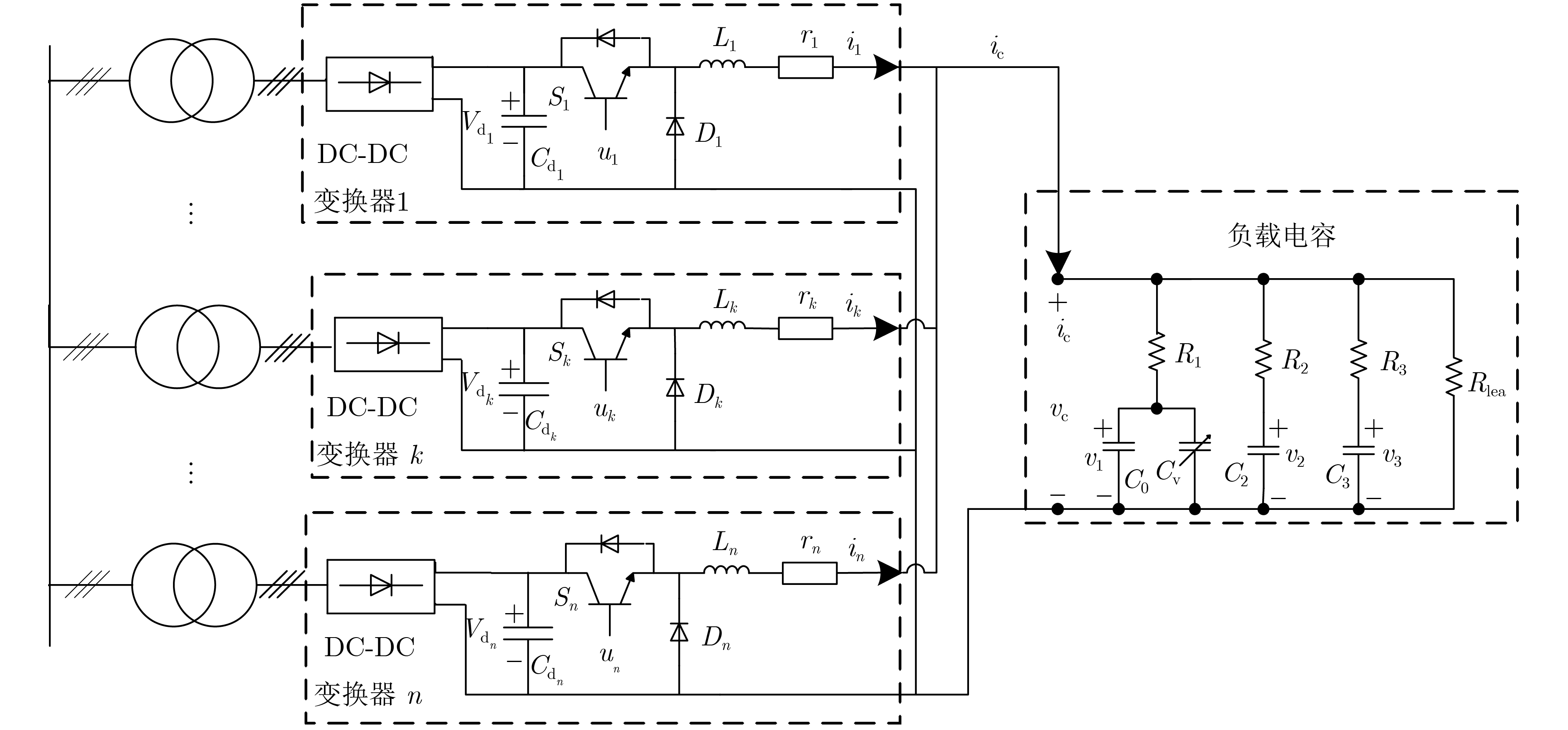
摘要: 针对一类具有容性负载的直流微电网系统, 提出了分布式协同控制方法. 具有容性负载的直流微电网是一类耦合动态互联非线性网络化系统, 可将DC-DC变换器在信息层视为智能体, 在每个子系统模块中, 引入容性负载电压观测器, 耦合并联非线性系统负载均衡控制设计问题可解耦成一阶积分器多智能体系统的输出一致性跟踪问题. 基于最近邻原则, 通过在控制器中引入比例、积分环节, 设计了增益可调的分布式协同PI控制律, 当有向图满足至少含有一棵生成树的条件下, 通过子系统间的局部交互, 可以实现负载均衡的目标. 通过分析增广系统矩阵的特征值证明了整个闭环系统的稳定性. 仿真和实验说明了所提出的控制方法的有效性及可行性.Abstract: In this paper, a distributed cooperative control is proposed for DC micro-grid systems with capacitive loads that is the coupled dynamical interconnected nonlinear networked systems. By considering each DC-DC converter as an agent in the cyber layer and introducing voltage observers for capacitive loads in each sub-system, the coupled nonlinear dynamics is decoupled into a first-order integrator and the load-sharing control design is converted into an output consensus tracking problem of such linear multi-agent system. Based on the nearest neighborhood rule, a distributed cooperative PI control law with tunable gains is designed accordingly by adopting proportional and integral control loop. The load-sharing objective is achieved through local interaction in a cooperative way provided that the directed graph at least has a spanning tree. The overall closed-loop system stability is rigorously proved by analyzing the eigenvalues of the augmented system's matrix. Simulations and experimental results verify that the proposed approach is effective and feasible.
-
Key words:
- DC micro-grid systems /
- capacitive loads /
- distributed load-sharing /
- cooperative control
-
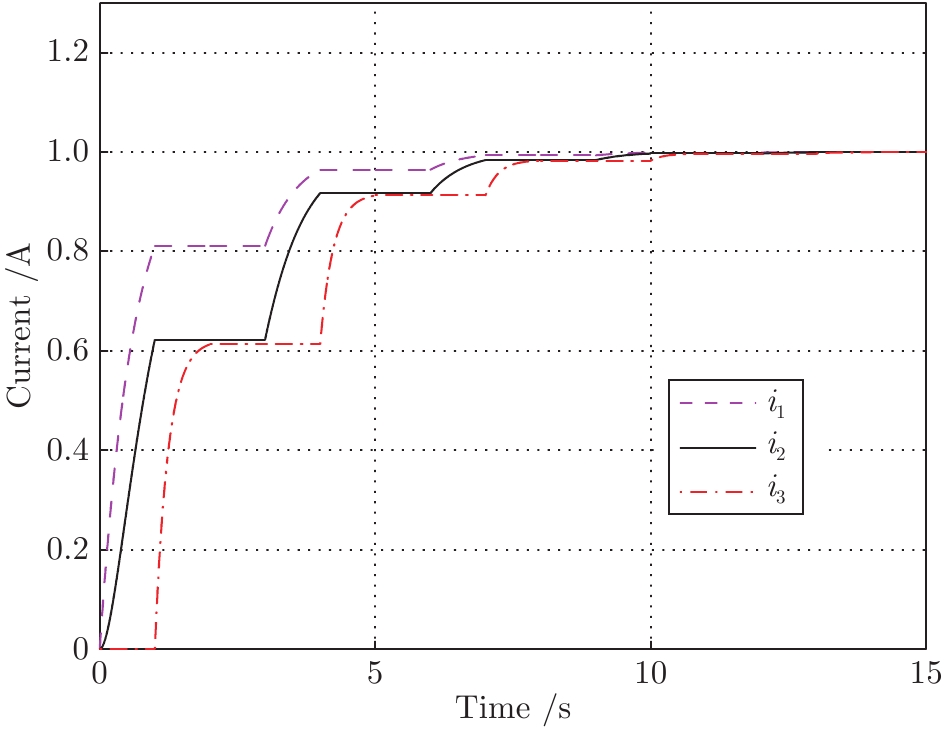
图 4 通信时断时续下3个模块的输出电流均衡曲线
Fig. 4 The current-sharing curves for the three modules with time varying communication
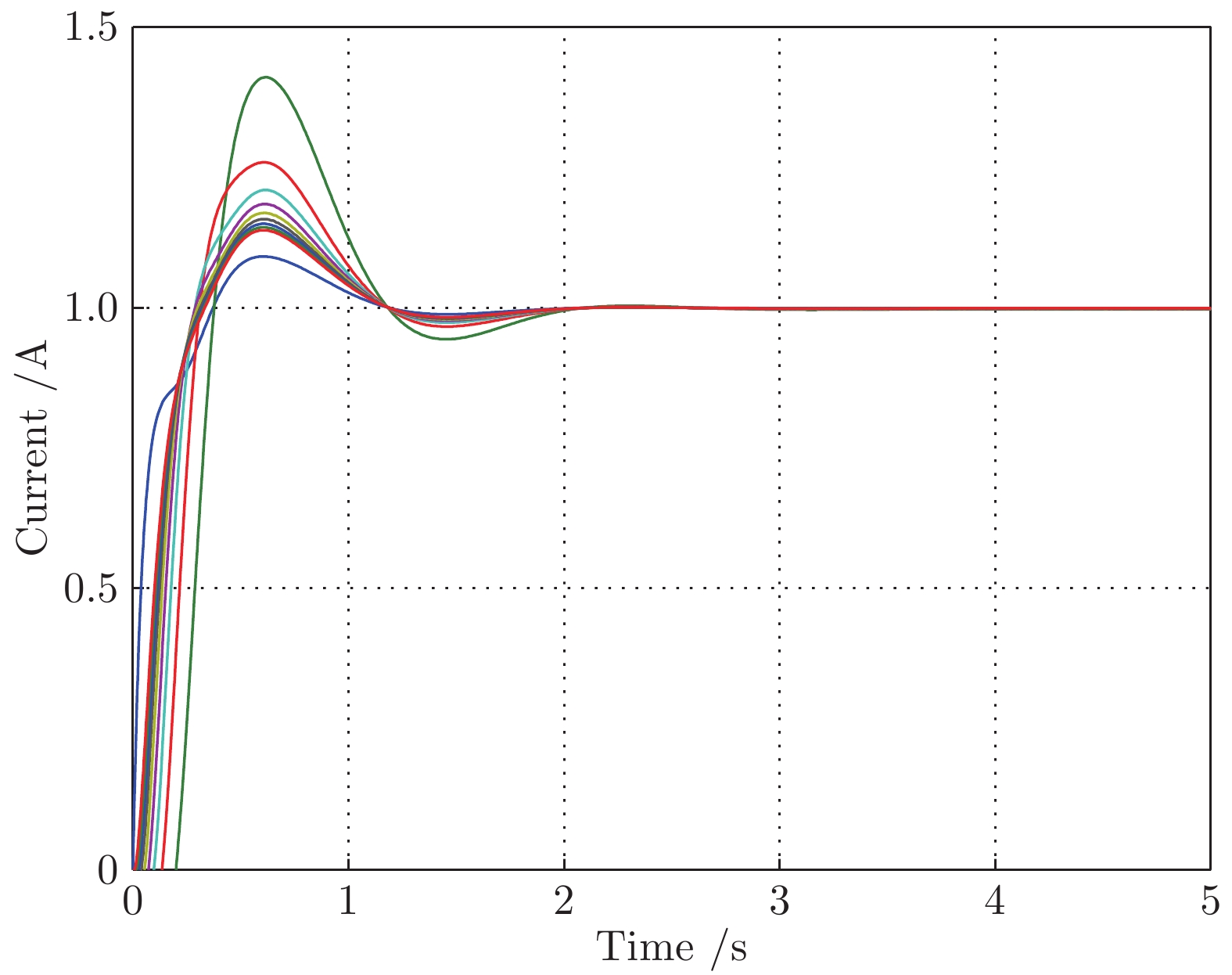
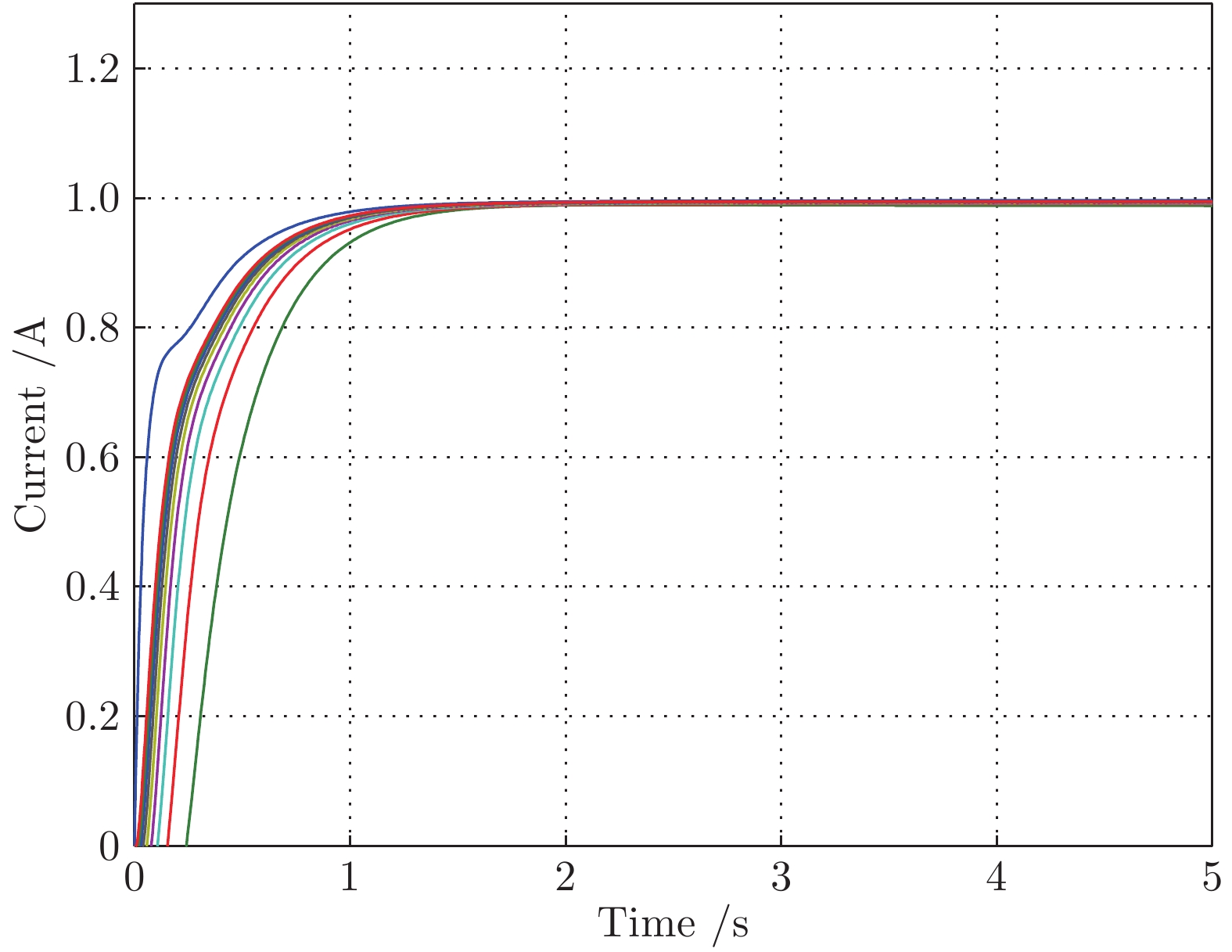
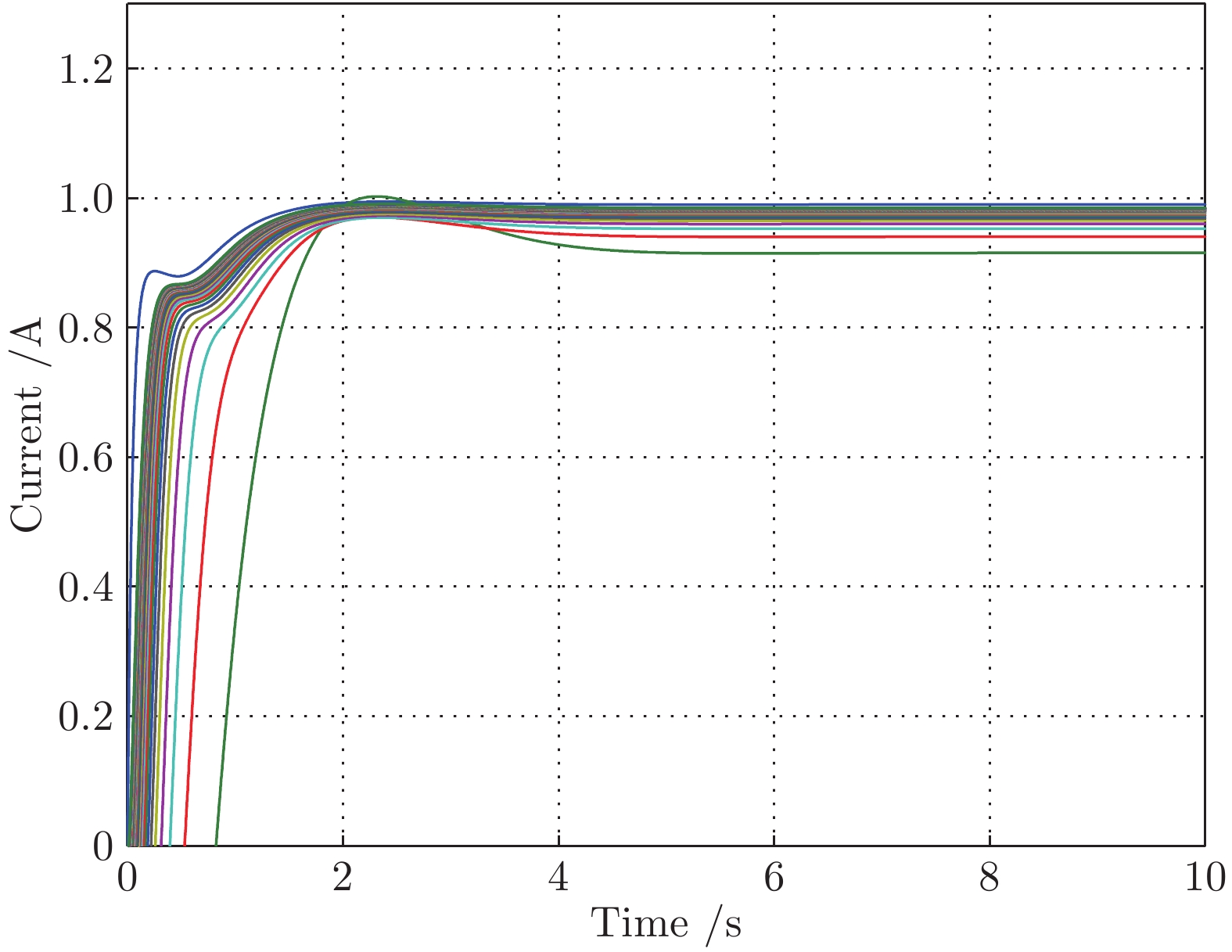
图 6 调节增益下10个模块的输出电流均衡曲线
Fig. 6 The current-sharing curves for the ten modules when the gains are tuned
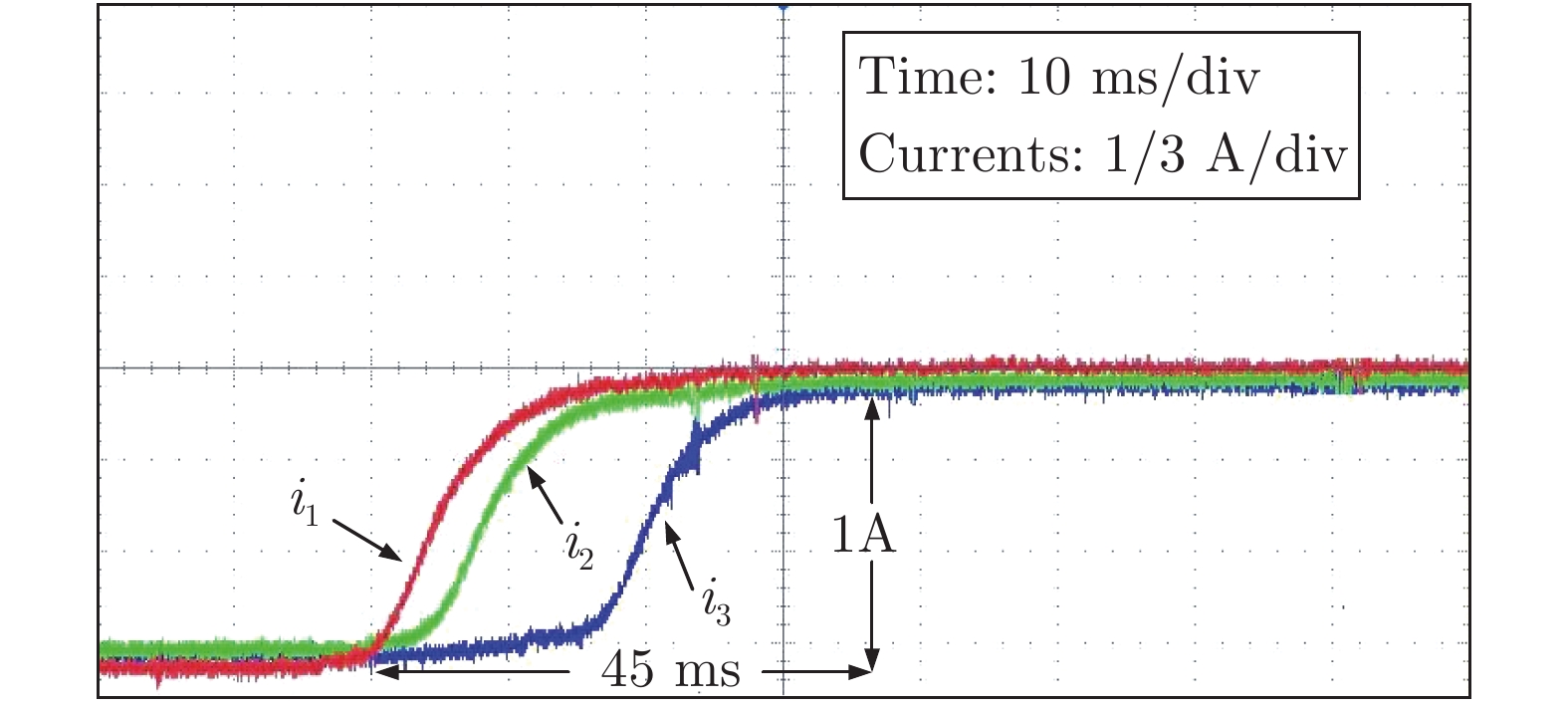
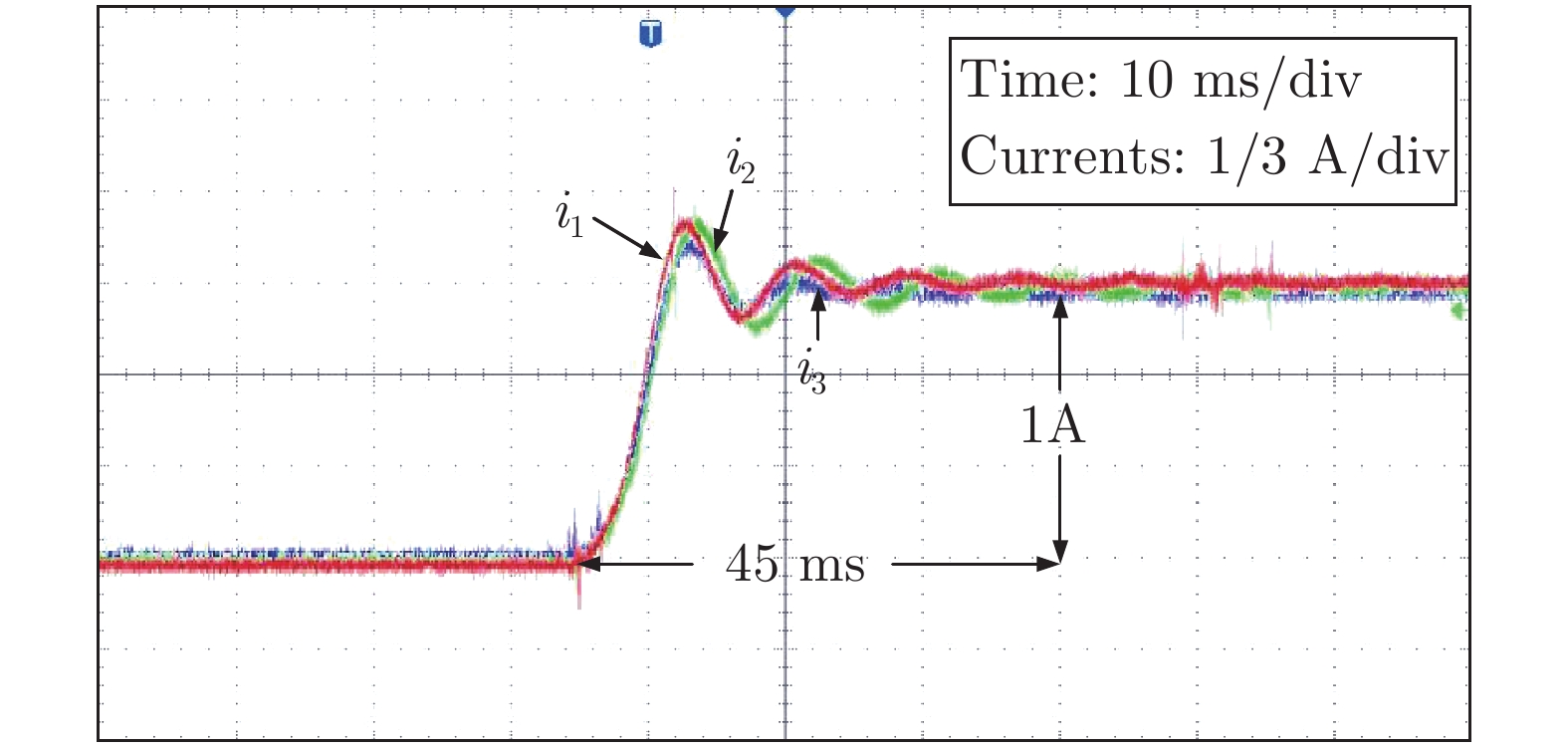
图 9 并联模块均流实验结果
Fig. 9 The current-sharing experimental results for 3 parallel-connected modules
-
[1] Jadbabaie A, Lin J, Morse A S. Coordination of groups of mobile agents using nearest neighbor rules. IEEE Transactions on Automatic Control, 2003, 48(6): 988−1001 doi: 10.1109/TAC.2003.812781 [2] Olfati-Saber R, Alex Faxand J, Murray R. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95(1): 215−233 doi: 10.1109/JPROC.2006.887293 [3] Aysal T C, Yildiz M E, Sarwate A D, Scaglione A. Broadcast gossip algorithms for consensus. IEEE Transaction on Signal Process, 2009, 57(7): 2748−2761 doi: 10.1109/TSP.2009.2016247 [4] Olfati-Saber R, Murray R M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control, 2004, 49(9): 1520−1533 doi: 10.1109/TAC.2004.834113 [5] Ren W, Beard R W. Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5): 655−661 doi: 10.1109/TAC.2005.846556 [6] Qu Z H, Wang J, Hull R A. Cooperative control of dynamical systems with application to autonomous vehicles. IEEE Transactions on Automatic Control, 2008, 53(4): 894−911 doi: 10.1109/TAC.2008.920232 [7] Xin H H, Lu Z, Qu Z H, Gan D F, Qi D. Cooperative control strategy for multiple photovoltaic generators in distribution networks. IET Control Theory and Applications, 2011, 5(14): 1617−1629 doi: 10.1049/iet-cta.2010.0538 [8] Moayedi S, Nasirian V, Lewis F L, Davoudi A. Team oriented load sharing in parallel DC-DC converters. IEEE Transactions on Industrial Electronics, 2015, 51(1): 479−490 [9] Behjati H, Davoudi A, Lewis F L. Modular DC-DC converters on graphs: Cooperative control. IEEE Transactions on Power Electronics, 2014, 29(12): 6725−6741 doi: 10.1109/TPEL.2014.2303192 [10] Nasirian V, Davoudi A, Lewis F L, Guerrero J. M. Distributed adaptive droop control for DC distribution systems. IEEE Transactions on Energy Conversion, 2014, 29(4): 944−956 doi: 10.1109/TEC.2014.2350458 [11] Shafiee Q, Dragicevic T, Vasquez J C, Guerrero J. M. Hierarchical control for multiple DC-microgrids clusters. IEEE Transactions on Energy Conversion, 2014, 29(4): 922−933 doi: 10.1109/TEC.2014.2362191 [12] Moayedi S, Davoudi A. Distributed tertiary control of DC microgrid clusters. IEEE Transactions on Power Electronics, 2016, 31(2): 1717−1733 doi: 10.1109/TPEL.2015.2424672 [13] Ding L, Han Q L, Wang L Y, Sindi E. Distributed cooperative optimal control of DC microgrids with communication delays. IEEE Transactions on Industrial Informatics, 2018, 14(9): 3924−3935 doi: 10.1109/TII.2018.2799239 [14] Abhinav S, Modares H, Davoudi A, Lewis F L. Resilient cooperative control of DC microgrids. IEEE Transactions on Smart Grid, 2019, 10(1): 1083−1086 doi: 10.1109/TSG.2018.2872252 [15] Erickson R W. Fundamentals of Power Electronics. London: Kluwer Aademic Publishers, 2004. 1−883 [16] Zubieta L, Bonert R. Characterization of double-layer capacitors for power electronics applications. IEEE Transactions on Industry Applications, 2000, 36(1): 199−205 doi: 10.1109/28.821816 [17] Diestel R. Graph Theory. New York: Springer-Verlag, 1997. 1−451 [18] Bassi E, Benzi F, Lusetti L, Buja G S. Communication protocols for electrical drives. In: Proceedings of the 21st International Conference on Industrial Electronics, Control and Instrumentation. Orlando, USA: IEEE, 1995. 706−711 [19] Behjati H, Davoudi A, Lewis F L. Distributed multiagent control of parallel Cúk converters using feedback linearization.In: Proceedings of the 29th IEEE Applied Power Electronics Conference and Exposition. Fort Worth, USA: IEEE, 2014. 1979–1985 [20] Zhang H W, Lewis F L, Qu Z H. Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs. IEEE Transactions on Industrial Electronics, 2012, 59(7): 3026−3041 -

 下载:
下载:



图(10)
计量
- 文章访问数: 1560
- HTML全文浏览量: 379
- PDF下载量: 210
- 被引次数: 0
