2019年 第45卷 第9期
2019, 45(9): 1611-1619.
doi: 10.16383/j.aas.c190570
cstr: 32138.14.j.aas.c190570
摘要:
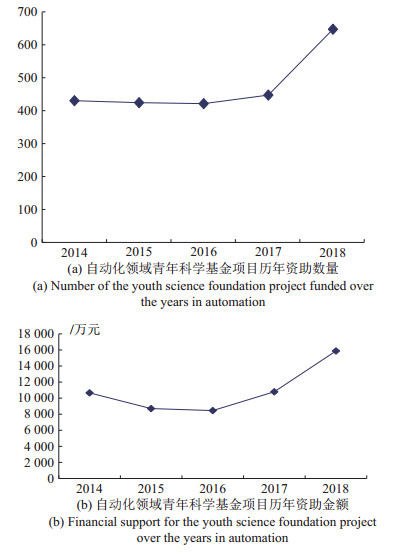
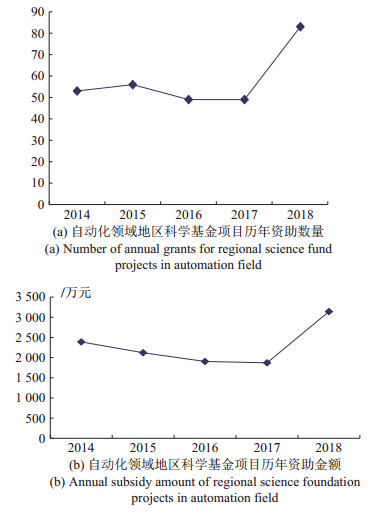
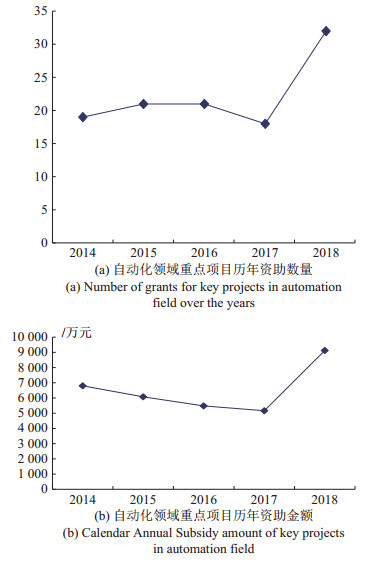
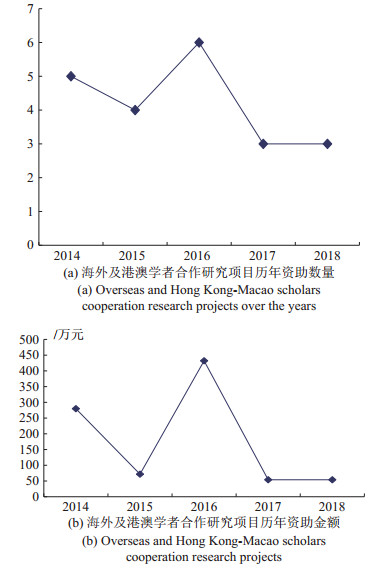
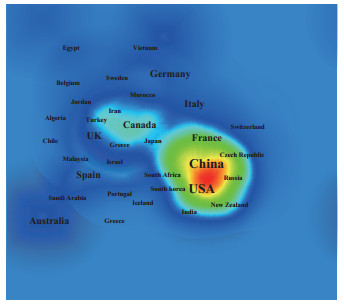
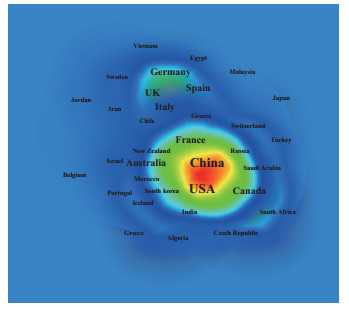
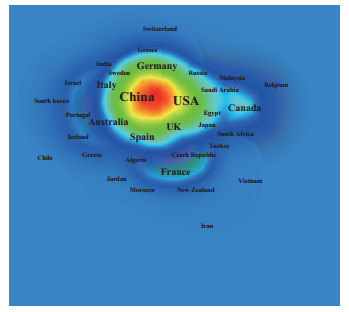
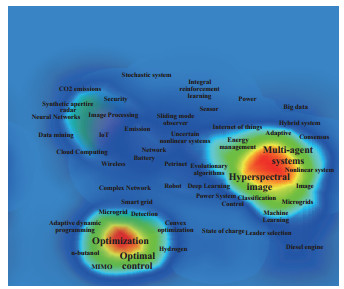
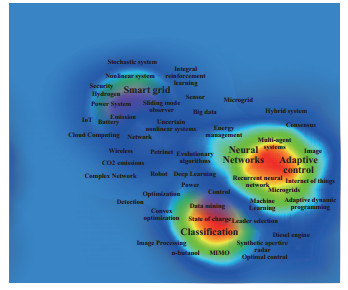
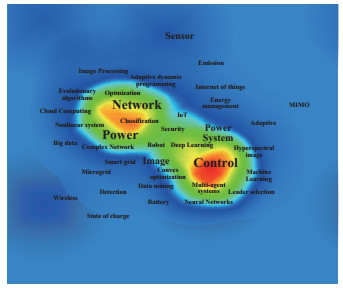
国家自然科学基金是国家支持自动化学科基础研究的主要渠道之一.本文以2014-2018年国家自然科学基金资助项目统计数据为依据,详细分析了五年间信息科学部F03自动化学科在面上项目、青年科学基金项目、地区科学基金项目、重点项目和海外及港澳学者合作研究项目所获资助情况.参考科学基金的资助项目数量、金额及研究内容等方面,及中国学者在自动化领域的研究成果分析了我国自动化学科的研究现状.根据2014-2018年各国学者对自动化学科的研究成果贡献量和关键词热度,将我国自动化学科研究水平与国际先进水平进行了比较,并进一步分析了自动化领域的发展趋势与展望.
国家自然科学基金是国家支持自动化学科基础研究的主要渠道之一.本文以2014-2018年国家自然科学基金资助项目统计数据为依据,详细分析了五年间信息科学部F03自动化学科在面上项目、青年科学基金项目、地区科学基金项目、重点项目和海外及港澳学者合作研究项目所获资助情况.参考科学基金的资助项目数量、金额及研究内容等方面,及中国学者在自动化领域的研究成果分析了我国自动化学科的研究现状.根据2014-2018年各国学者对自动化学科的研究成果贡献量和关键词热度,将我国自动化学科研究水平与国际先进水平进行了比较,并进一步分析了自动化领域的发展趋势与展望.



2019, 45(9): 1620-1636.
doi: 10.16383/j.aas.c180720
cstr: 32138.14.j.aas.c180720
摘要:
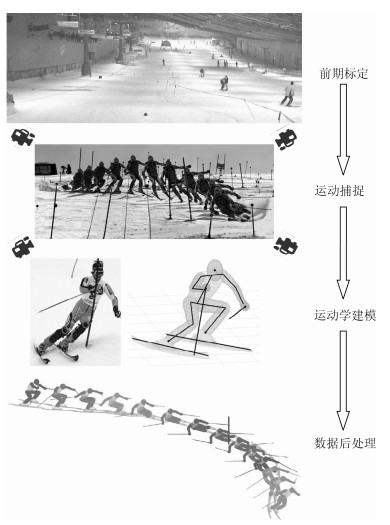
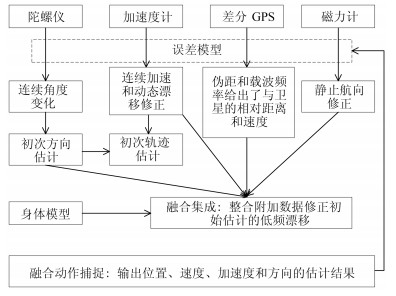
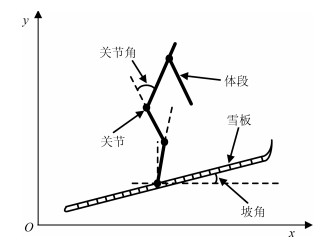
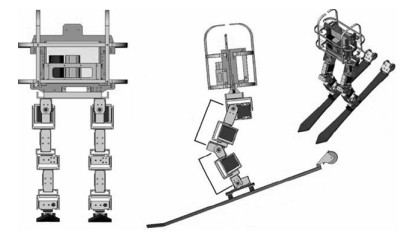
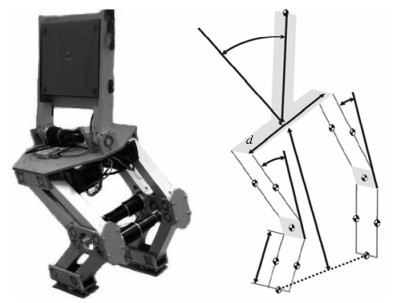
随着我国冰雪运动的蓬勃发展和2022年北京冬季奥运会的成功申办,冰雪运动生物力学和冰雪机器人的研究越来越受关注.首先,介绍冰雪环境下摩擦力学的基本理论,进一步,对比不同变量对摩擦系数的影响;其次,讨论冰雪运动中空气阻力的成因,并分析潜在的减阻机制;再次,介绍研究中常用的测量手段和不同维度的建模方法,阐明各类手段和方法的优缺点;最后,回顾冰雪机器人的研究进展,分析冰雪机器人研究领域的技术挑战,展望冰雪机器人未来的研究思路.
随着我国冰雪运动的蓬勃发展和2022年北京冬季奥运会的成功申办,冰雪运动生物力学和冰雪机器人的研究越来越受关注.首先,介绍冰雪环境下摩擦力学的基本理论,进一步,对比不同变量对摩擦系数的影响;其次,讨论冰雪运动中空气阻力的成因,并分析潜在的减阻机制;再次,介绍研究中常用的测量手段和不同维度的建模方法,阐明各类手段和方法的优缺点;最后,回顾冰雪机器人的研究进展,分析冰雪机器人研究领域的技术挑战,展望冰雪机器人未来的研究思路.



2019, 45(9): 1637-1654.
doi: 10.16383/j.aas.c180728
cstr: 32138.14.j.aas.c180728
摘要:
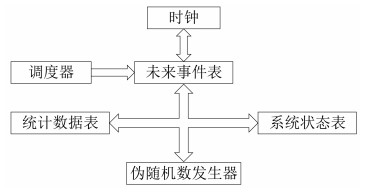
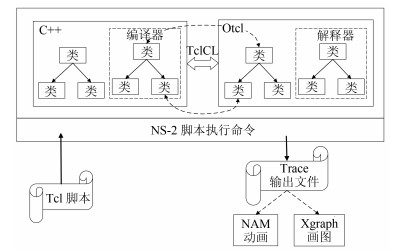
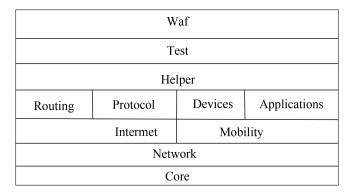
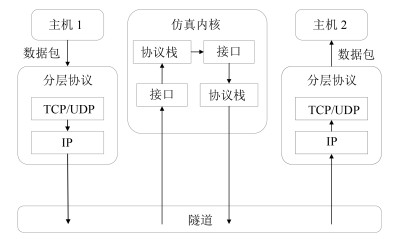
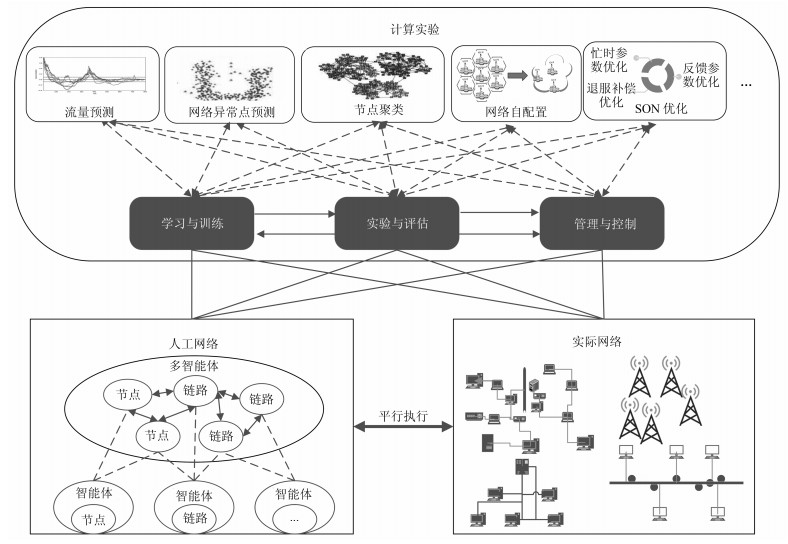
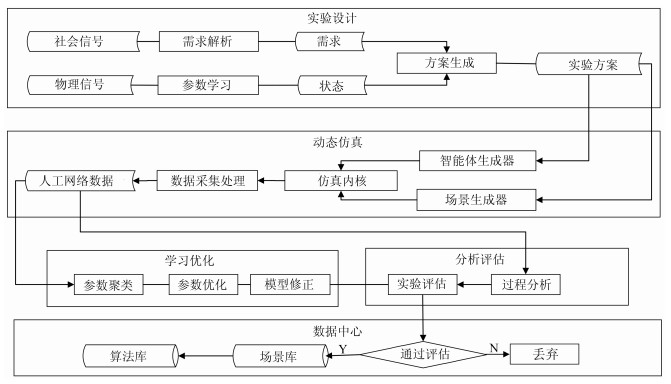
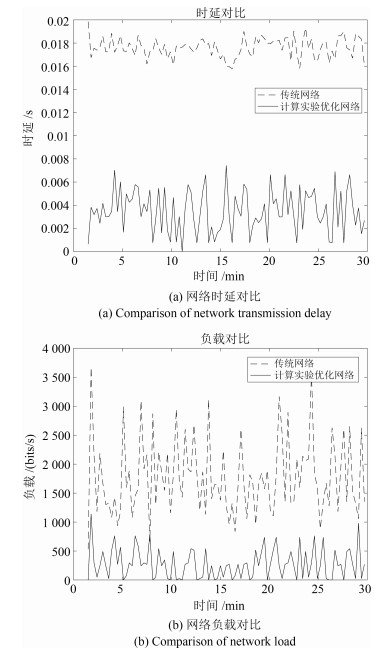
本文首先介绍了网络仿真技术的概念、特点和发展现状,在此基础上介绍了当前主流的通用型网络仿真软件的主要特点并对它们进行了对比分析和评价.为了解决现有网络架构灵活性和服务能力差的问题,我们引入了面向大数据建模、能够对网络整体状态进行预测和实时优化的平行网络架构及其计算实验平台.该平台融合虚拟的人工网络和实际网络的数据并对其进行实验分析和评估,可以发现最优的控制方案.基于平行网络计算实验方法,本文设计了针对微信朋友圈转发预测的网络优化方法,并通过实验验证了该方法可以有效提升网络的性能.
本文首先介绍了网络仿真技术的概念、特点和发展现状,在此基础上介绍了当前主流的通用型网络仿真软件的主要特点并对它们进行了对比分析和评价.为了解决现有网络架构灵活性和服务能力差的问题,我们引入了面向大数据建模、能够对网络整体状态进行预测和实时优化的平行网络架构及其计算实验平台.该平台融合虚拟的人工网络和实际网络的数据并对其进行实验分析和评估,可以发现最优的控制方案.基于平行网络计算实验方法,本文设计了针对微信朋友圈转发预测的网络优化方法,并通过实验验证了该方法可以有效提升网络的性能.
2019, 45(9): 1655-1665.
doi: 10.16383/j.aas.c180020
cstr: 32138.14.j.aas.c180020
摘要:
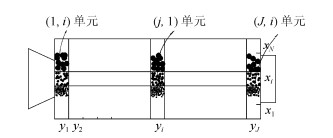
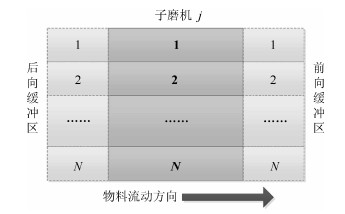
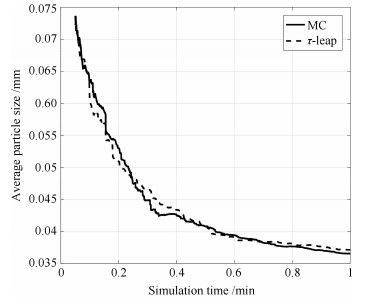
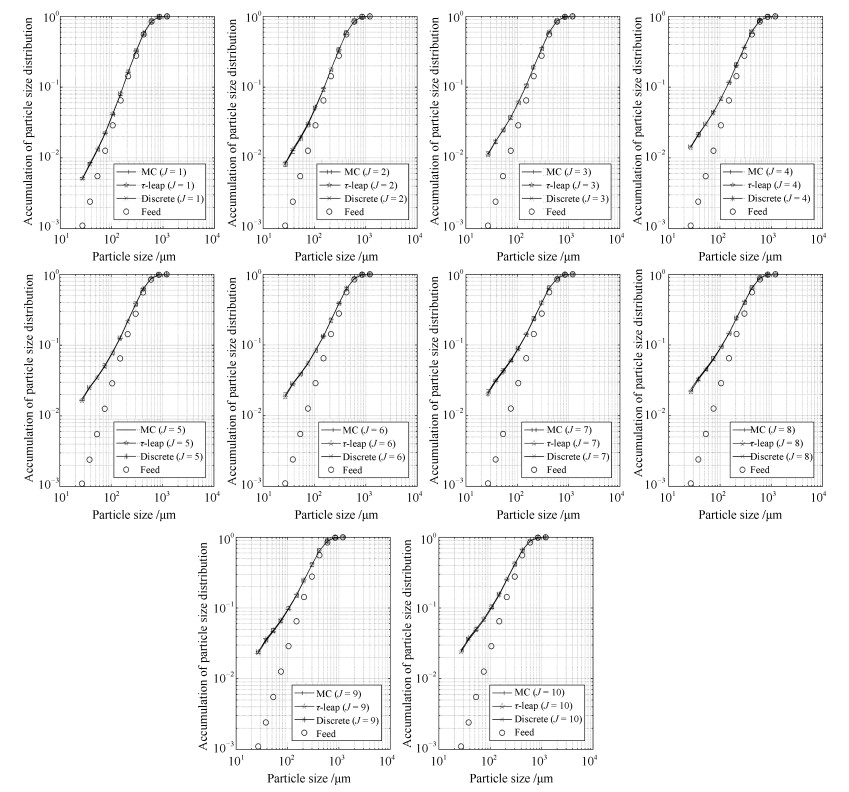
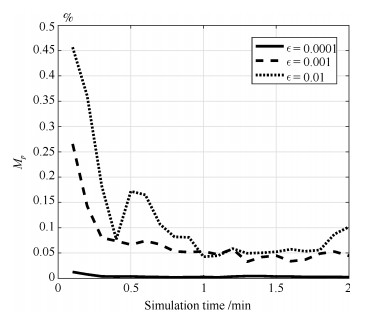
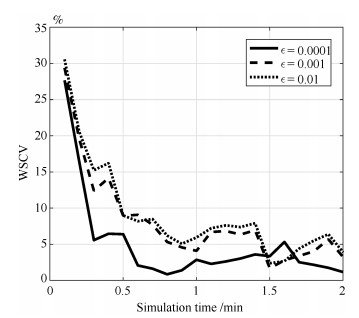
本文针对磨矿破碎过程,提出一种分布式参数蒙特卡洛动力学方法的粒度分布预测模型和模拟算法.该算法采用了分段思想,将磨机沿着轴向分为若干个虚拟的子磨机;根据破裂、前向和后向移动三类微观事件定义了倾向函数和系统状态矩阵,并设计了分布式算法的调度策略.此外,针对蒙特卡洛动力学算法效率低的问题,提出了基于τ-leap的磨矿过程分布式参数蒙特卡洛模拟加速算法.为了解决分布式参数更新过程中状态不一致的问题,创新性地提出了一种基于缓冲区的同步方法.通过对仿真案例的分析表明,本文提出的分布式参数蒙特卡洛动力学算法具有较高的精度,提出的基于τ-leap的加速算法能够显著提高计算效率,同时保持较好的精度.
本文针对磨矿破碎过程,提出一种分布式参数蒙特卡洛动力学方法的粒度分布预测模型和模拟算法.该算法采用了分段思想,将磨机沿着轴向分为若干个虚拟的子磨机;根据破裂、前向和后向移动三类微观事件定义了倾向函数和系统状态矩阵,并设计了分布式算法的调度策略.此外,针对蒙特卡洛动力学算法效率低的问题,提出了基于τ-leap的磨矿过程分布式参数蒙特卡洛模拟加速算法.为了解决分布式参数更新过程中状态不一致的问题,创新性地提出了一种基于缓冲区的同步方法.通过对仿真案例的分析表明,本文提出的分布式参数蒙特卡洛动力学算法具有较高的精度,提出的基于τ-leap的加速算法能够显著提高计算效率,同时保持较好的精度.

2019, 45(9): 1666-1678.
doi: 10.16383/j.aas.c180456
cstr: 32138.14.j.aas.c180456
摘要:
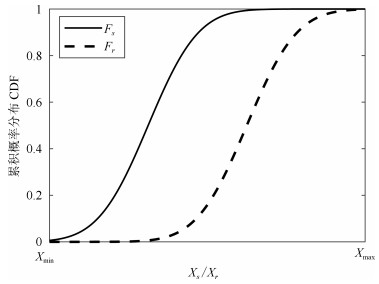
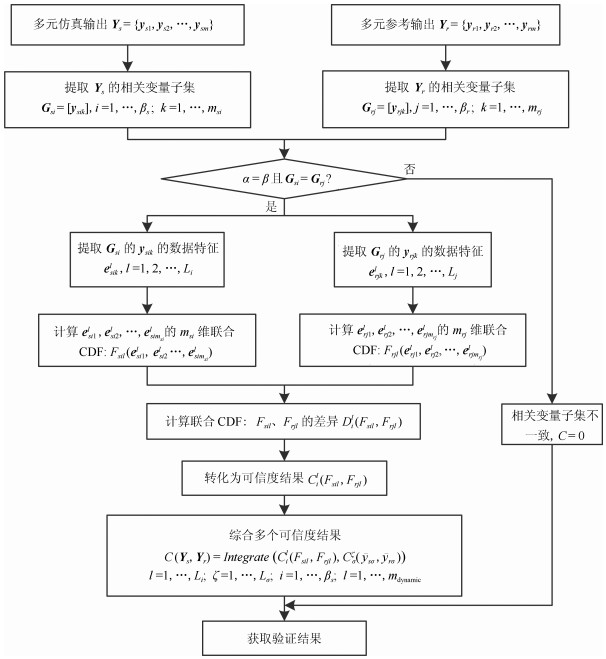
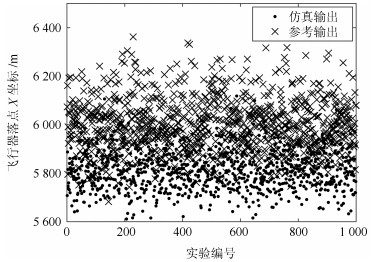
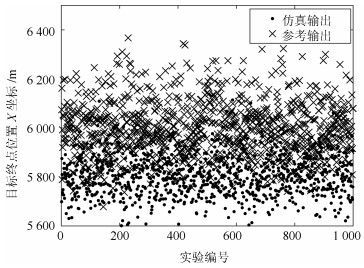
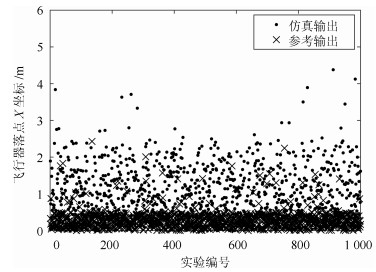
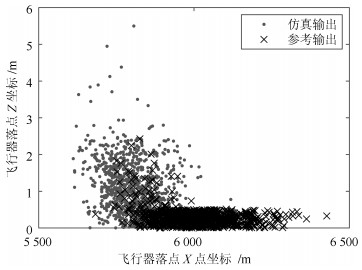
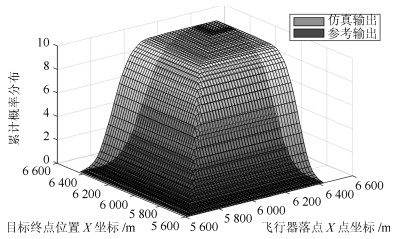
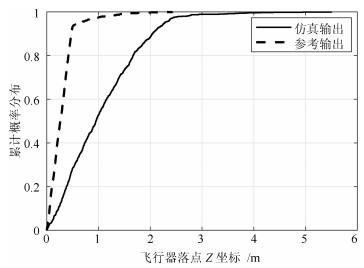
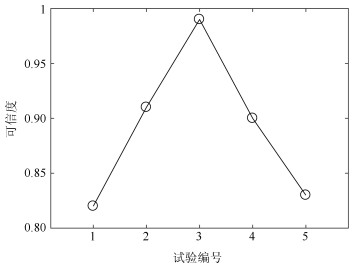
复杂仿真模型一般具有多个不同类型且带有相关性的输出,现有验证方法存在变量信息缺失、变量相关性度量不准确等问题.为此,提出基于变量选择和概率分布差异相结合的多变量仿真结果验证方法,考虑不确定性的影响,对选取到具有相关性的多个变量进行联合验证.首先,引入分形维数和互信息方法对多元异类输出进行相关性分析,提取相关变量子集.而后对相关变量子集中的各变量提取数据特征,进而计算各相关变量子集关于数据特征的联合概率分布,采用概率分布差异法度量仿真输出和参考输出联合概率分布的差异,并将其转化为一致性程度;在此基础上综合多个验证结果得到模型可信度.通过实例应用及对比实验,验证了方法的有效性.
复杂仿真模型一般具有多个不同类型且带有相关性的输出,现有验证方法存在变量信息缺失、变量相关性度量不准确等问题.为此,提出基于变量选择和概率分布差异相结合的多变量仿真结果验证方法,考虑不确定性的影响,对选取到具有相关性的多个变量进行联合验证.首先,引入分形维数和互信息方法对多元异类输出进行相关性分析,提取相关变量子集.而后对相关变量子集中的各变量提取数据特征,进而计算各相关变量子集关于数据特征的联合概率分布,采用概率分布差异法度量仿真输出和参考输出联合概率分布的差异,并将其转化为一致性程度;在此基础上综合多个验证结果得到模型可信度.通过实例应用及对比实验,验证了方法的有效性.



2019, 45(9): 1679-1690.
doi: 10.16383/j.aas.c180717
cstr: 32138.14.j.aas.c180717
摘要:
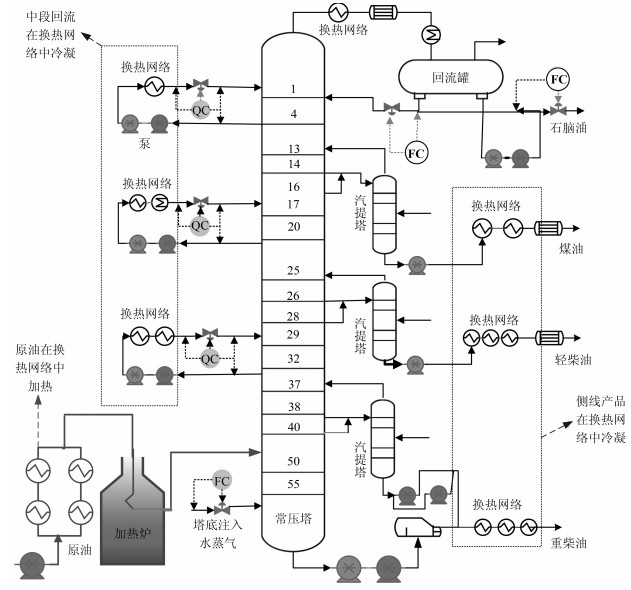
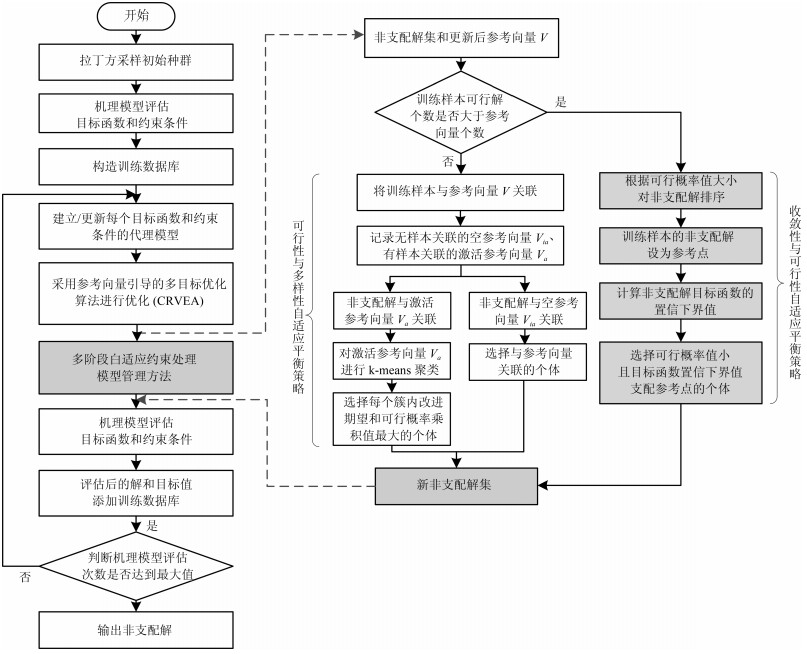
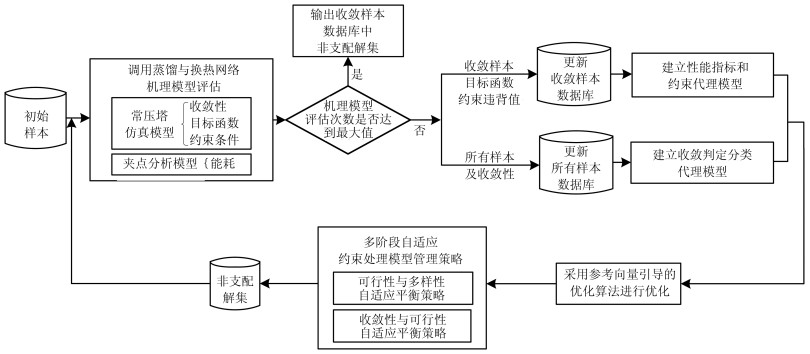
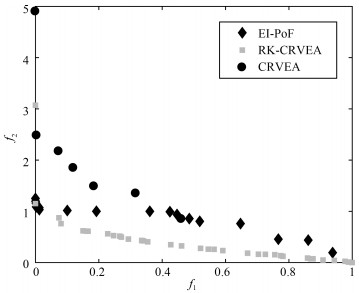
针对蒸馏装置与换热网络间缺乏协同优化导致的分馏精度差和能耗高的问题,提出了一种基于代理模型的约束多目标在线协同操作优化方法.为了解决蒸馏装置与换热网络操作参数协同优化时存在的计算耗时和约束的问题,构建Kriging代理模型来近似目标函数和约束条件,提出了基于随机欠采样和Adaboost的分类代理模型(RUSBoost)来解决类别不平衡的收敛判定预测问题.提出了基于多阶段自适应约束处理的代理模型的模型管理方法,该方法采用基于参考向量激活状态的最大化改善期望准则和可行概率准则更新机制来平衡优化初始阶段种群的多样性和可行性,采用支配参考点的置信下限准则更新机制加快收敛速度.通过不断与机理模型交互来在线更新代理模型,实现在线操作优化.通过测试函数和仿真实例验证了本文方法的有效性.
针对蒸馏装置与换热网络间缺乏协同优化导致的分馏精度差和能耗高的问题,提出了一种基于代理模型的约束多目标在线协同操作优化方法.为了解决蒸馏装置与换热网络操作参数协同优化时存在的计算耗时和约束的问题,构建Kriging代理模型来近似目标函数和约束条件,提出了基于随机欠采样和Adaboost的分类代理模型(RUSBoost)来解决类别不平衡的收敛判定预测问题.提出了基于多阶段自适应约束处理的代理模型的模型管理方法,该方法采用基于参考向量激活状态的最大化改善期望准则和可行概率准则更新机制来平衡优化初始阶段种群的多样性和可行性,采用支配参考点的置信下限准则更新机制加快收敛速度.通过不断与机理模型交互来在线更新代理模型,实现在线操作优化.通过测试函数和仿真实例验证了本文方法的有效性.



2019, 45(9): 1691-1700.
doi: 10.16383/j.aas.c180835
cstr: 32138.14.j.aas.c180835
摘要:
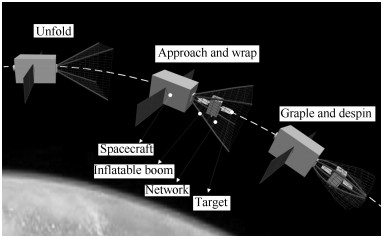
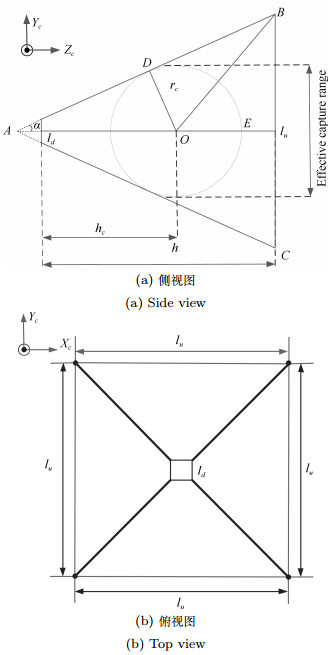
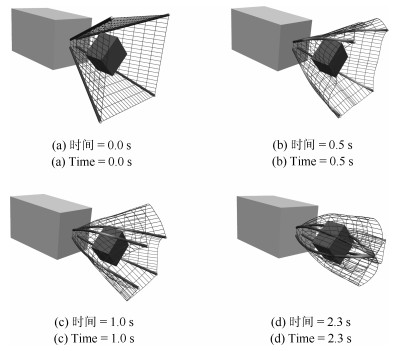
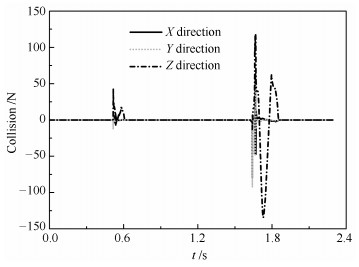
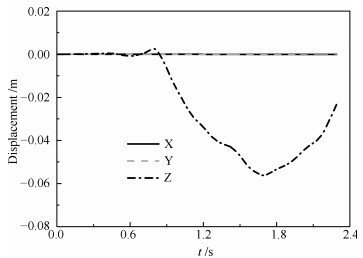
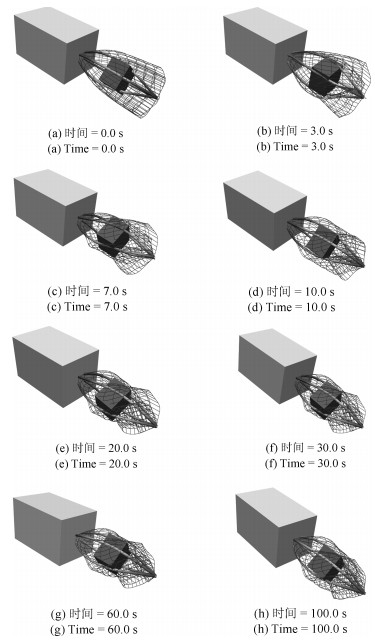
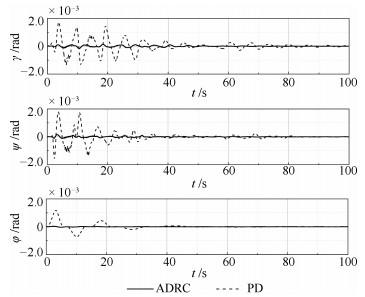
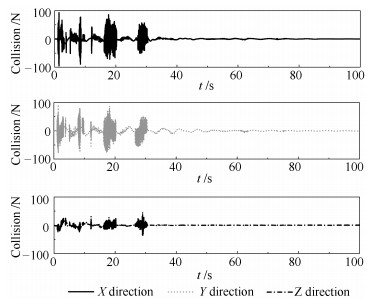
空间充气展开绳网系统是依靠充气梁展开绳网进行目标捕获的航天器系统,具有更好的稳定性和可操控性.然而由于充气梁和绳网的大柔性变形以及捕获失稳自旋目标后的未知碰撞,使得捕获后的航天器姿态稳定控制困难.本文主要基于自抗扰控制解决了空间充气展开绳网系统捕获目标后的姿态稳定和消旋难题.首先,基于理想薄膜充压失效理论和绝对节点坐标方法建立充气展开绳网系统动力学模型,而后设计了航天器姿态稳定自抗扰控制器,用于实时估计并补偿系统捕获过程中未知惯量目标与捕获机构的碰撞干扰.仿真结果表明,动力学模型能够模拟捕获过程中充气梁的屈曲失效及碰撞特性,自抗扰控制器能够有效抑制碰撞带来的干扰,实现空间充气展开绳网系统捕获后的高精度姿态稳定控制,同时能够在有限时间内对自旋目标实现消旋.
空间充气展开绳网系统是依靠充气梁展开绳网进行目标捕获的航天器系统,具有更好的稳定性和可操控性.然而由于充气梁和绳网的大柔性变形以及捕获失稳自旋目标后的未知碰撞,使得捕获后的航天器姿态稳定控制困难.本文主要基于自抗扰控制解决了空间充气展开绳网系统捕获目标后的姿态稳定和消旋难题.首先,基于理想薄膜充压失效理论和绝对节点坐标方法建立充气展开绳网系统动力学模型,而后设计了航天器姿态稳定自抗扰控制器,用于实时估计并补偿系统捕获过程中未知惯量目标与捕获机构的碰撞干扰.仿真结果表明,动力学模型能够模拟捕获过程中充气梁的屈曲失效及碰撞特性,自抗扰控制器能够有效抑制碰撞带来的干扰,实现空间充气展开绳网系统捕获后的高精度姿态稳定控制,同时能够在有限时间内对自旋目标实现消旋.








2019, 45(9): 1701-1712.
doi: 10.16383/j.aas.c180213
cstr: 32138.14.j.aas.c180213
摘要:
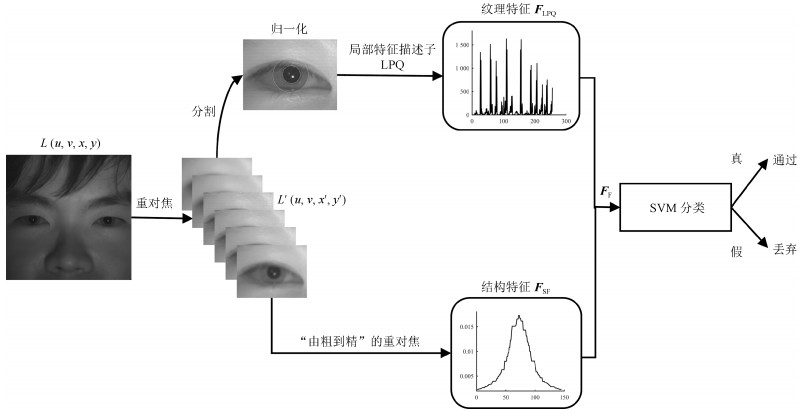
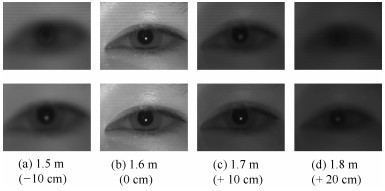
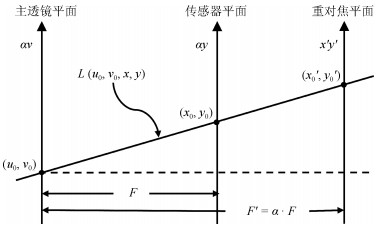
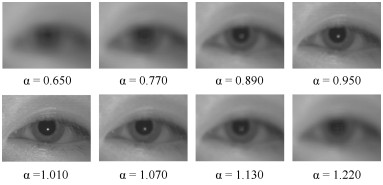
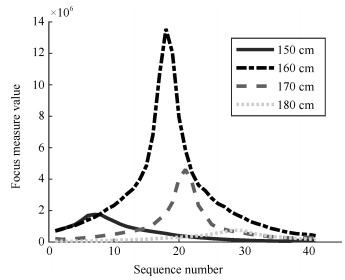
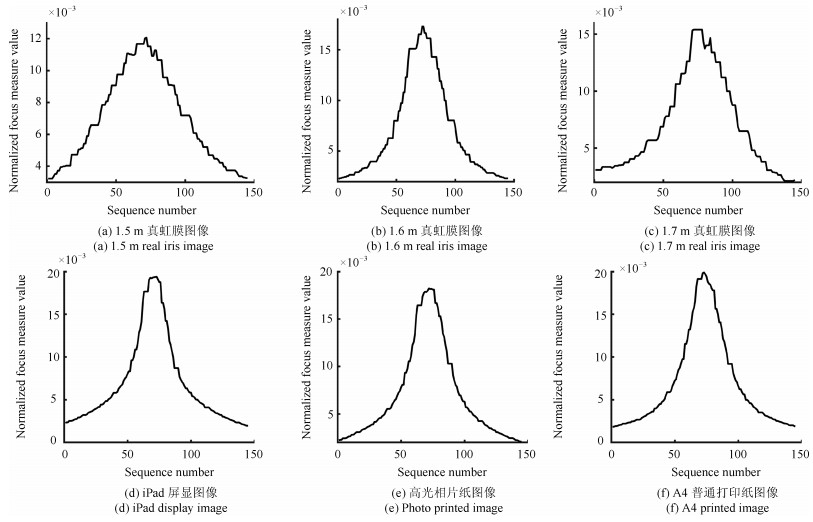
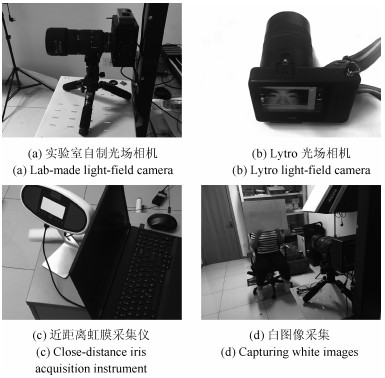
光场成像相对传统光学成像是一次重大技术革新,高维光场信息为生物特征识别的发展与创新带来了新机遇.虹膜身份识别技术以其唯一性、稳定性、高精度等优势广泛应用于国防、教育、金融等各个领域,但是现有的虹膜识别系统容易被人造假体虹膜样本欺骗导致误识别.因此,虹膜活体检测是当前虹膜识别研究亟待解决的关键问题.本文提出一种基于计算光场成像的虹膜活体检测方法,通过软硬件结合的方式,充分挖掘四维光场数据的信息.本方法使用实验室自主研发的光场相机采集光场虹膜图像,利用光场数字重对焦技术提取眼周区域的立体结构特征和虹膜图像的纹理特征,进行特征融合与虹膜分类.在自主采集的近红外光场虹膜活体检测数据库上进行实验,本方法的平均分类错误率(Average classification error rate,ACER)为3.69%,在现有最佳方法的基础上降低5.94%.实验结果表明本方法可以准确有效地检测并阻止打印虹膜和屏显虹膜对系统的攻击.
光场成像相对传统光学成像是一次重大技术革新,高维光场信息为生物特征识别的发展与创新带来了新机遇.虹膜身份识别技术以其唯一性、稳定性、高精度等优势广泛应用于国防、教育、金融等各个领域,但是现有的虹膜识别系统容易被人造假体虹膜样本欺骗导致误识别.因此,虹膜活体检测是当前虹膜识别研究亟待解决的关键问题.本文提出一种基于计算光场成像的虹膜活体检测方法,通过软硬件结合的方式,充分挖掘四维光场数据的信息.本方法使用实验室自主研发的光场相机采集光场虹膜图像,利用光场数字重对焦技术提取眼周区域的立体结构特征和虹膜图像的纹理特征,进行特征融合与虹膜分类.在自主采集的近红外光场虹膜活体检测数据库上进行实验,本方法的平均分类错误率(Average classification error rate,ACER)为3.69%,在现有最佳方法的基础上降低5.94%.实验结果表明本方法可以准确有效地检测并阻止打印虹膜和屏显虹膜对系统的攻击.



2019, 45(9): 1713-1726.
doi: 10.16383/j.aas.c180258
cstr: 32138.14.j.aas.c180258
摘要:
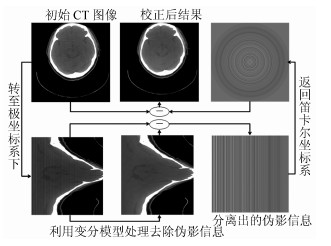
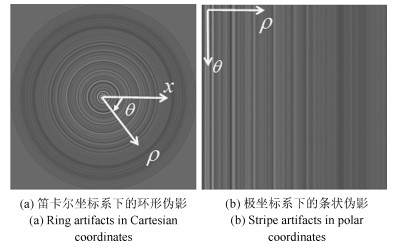
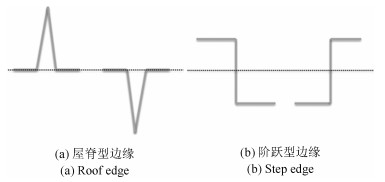
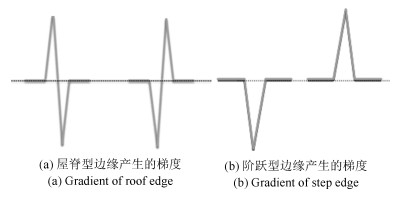
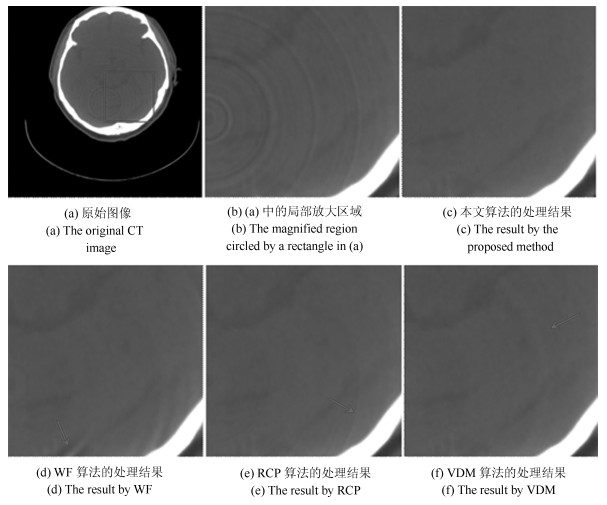
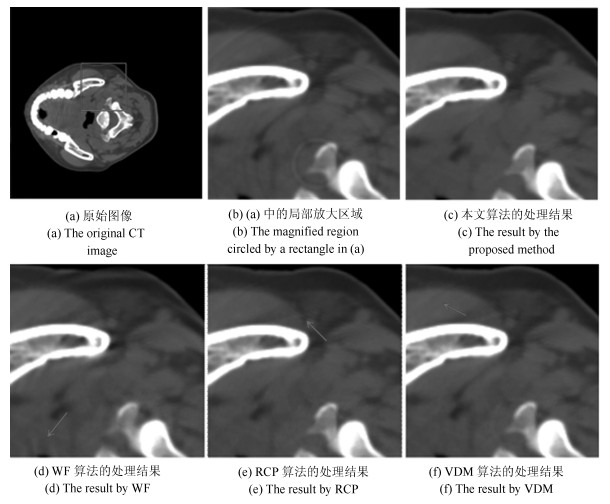
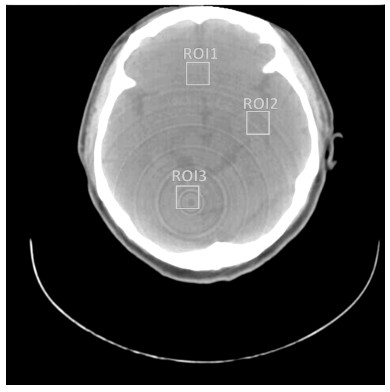
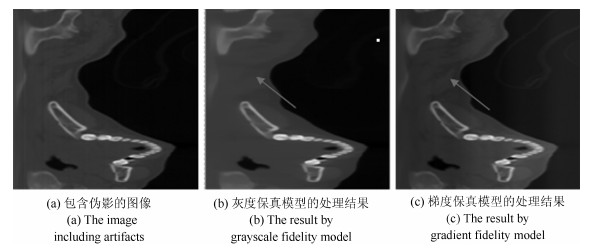
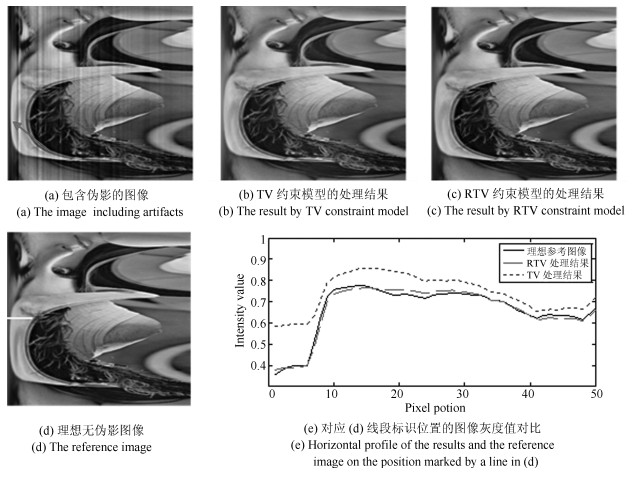
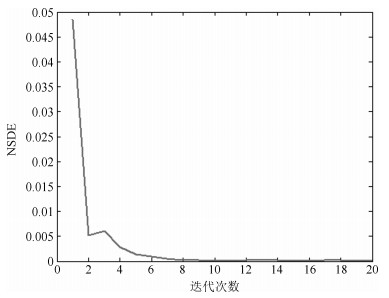
有效去除CT图像中环形伪影是医学图像处理领域的一个重要研究方向,现有的方法在去除环形伪影的同时,对CT图像的边缘及细节保留存在困难和挑战.本文采用变分优化的思想,将环形伪影的去除问题建模为一个能量最小化问题,来缓解保持图像信息和去除伪影之间的矛盾,提出了一种后处理的伪影校正算法.根据环形伪影产生机理和特性表现构造有针对性的变分模型,一是从环形伪影的几何特性入手,设计更为合理的梯度保真形式,增强模型对图像细节信息的保护;二是从环形伪影的边缘特性入手,构建具有伪影辨识能力的相对全变分正则项,降低模型对图像结构性信息的影响.基于构造的变分模型,采用高效的优化求解算法,实现环形伪影的有效去除.对比实验表明,无论在视觉观察还是定量分析方面,本文算法均体现出了较好的性能.
有效去除CT图像中环形伪影是医学图像处理领域的一个重要研究方向,现有的方法在去除环形伪影的同时,对CT图像的边缘及细节保留存在困难和挑战.本文采用变分优化的思想,将环形伪影的去除问题建模为一个能量最小化问题,来缓解保持图像信息和去除伪影之间的矛盾,提出了一种后处理的伪影校正算法.根据环形伪影产生机理和特性表现构造有针对性的变分模型,一是从环形伪影的几何特性入手,设计更为合理的梯度保真形式,增强模型对图像细节信息的保护;二是从环形伪影的边缘特性入手,构建具有伪影辨识能力的相对全变分正则项,降低模型对图像结构性信息的影响.基于构造的变分模型,采用高效的优化求解算法,实现环形伪影的有效去除.对比实验表明,无论在视觉观察还是定量分析方面,本文算法均体现出了较好的性能.




2019, 45(9): 1727-1742.
doi: 10.16383/j.aas.2018.c170052
cstr: 32138.14.j.aas.2018.c170052
摘要:
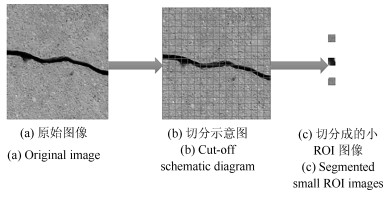
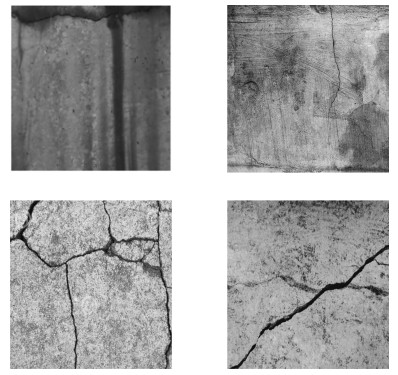
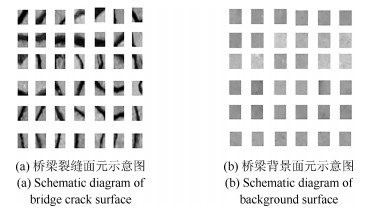
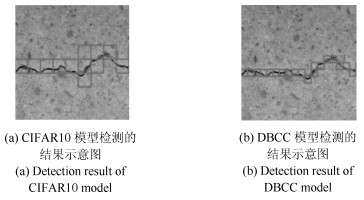
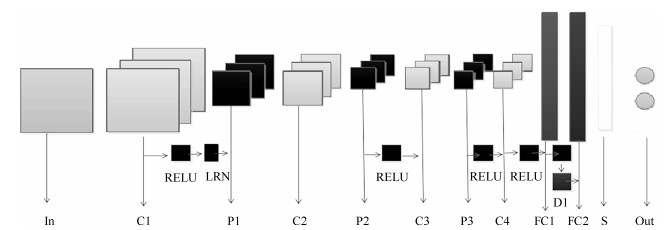
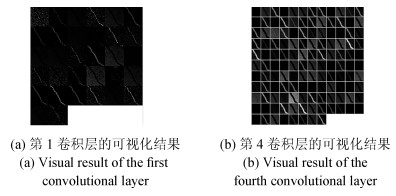
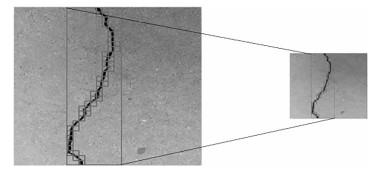
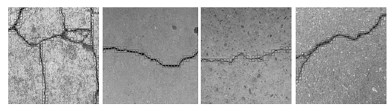
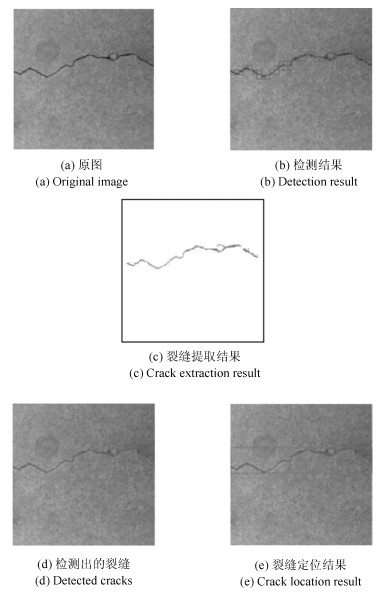
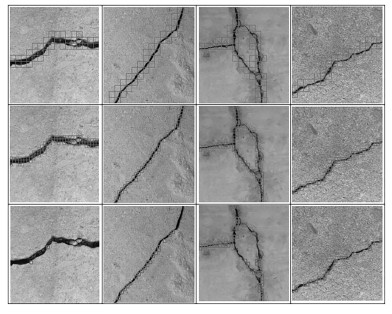
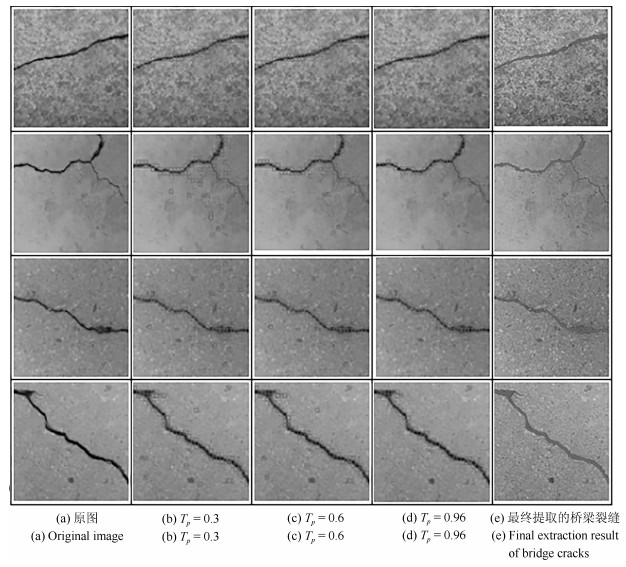
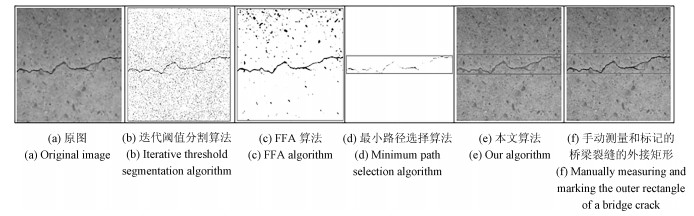
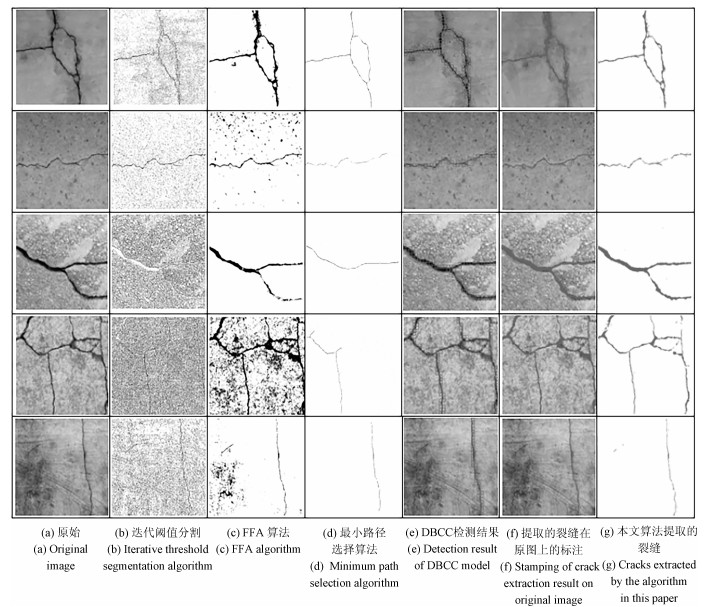
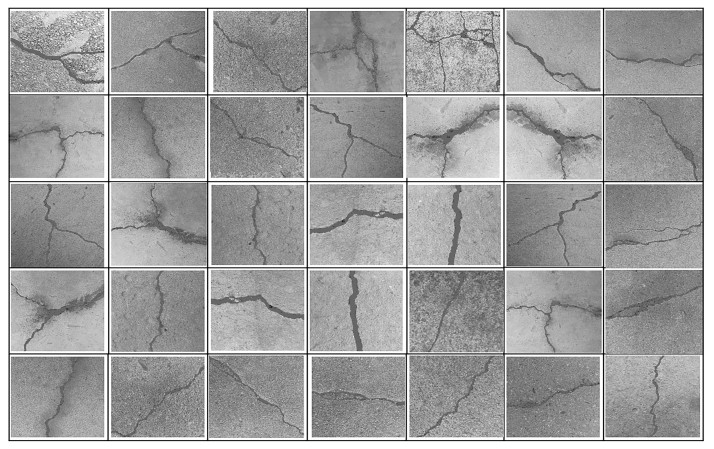
传统的图像处理算法不能很好地对桥梁裂缝进行检测,而经典的深度学习模型直接用于桥梁裂缝的检测,效果不甚理想.针对这些问题,本文提出了一种基于深度学习的桥梁裂缝检测算法.首先,利用滑动窗口算法将桥梁裂缝图像切分为较小的桥梁裂缝面元图像和桥梁背景面元图像,并根据对面元图像的分析,提出一种基于卷积神经网络(Convolutional neural networks,CNN)的DBCC(Deep bridge crack classify)分类模型,用于桥梁背景面元和桥梁裂缝面元的识别.然后,基于DBCC分类模型结合改进的窗口滑动算法对桥梁裂缝进行检测.最后,采用图像金字塔和感兴趣区域(Region of interest,ROI)结合的搜索策略对算法进行加速.实验结果表明:与传统算法相比,本文算法具有更好的识别效果和更强的泛化能力.
传统的图像处理算法不能很好地对桥梁裂缝进行检测,而经典的深度学习模型直接用于桥梁裂缝的检测,效果不甚理想.针对这些问题,本文提出了一种基于深度学习的桥梁裂缝检测算法.首先,利用滑动窗口算法将桥梁裂缝图像切分为较小的桥梁裂缝面元图像和桥梁背景面元图像,并根据对面元图像的分析,提出一种基于卷积神经网络(Convolutional neural networks,CNN)的DBCC(Deep bridge crack classify)分类模型,用于桥梁背景面元和桥梁裂缝面元的识别.然后,基于DBCC分类模型结合改进的窗口滑动算法对桥梁裂缝进行检测.最后,采用图像金字塔和感兴趣区域(Region of interest,ROI)结合的搜索策略对算法进行加速.实验结果表明:与传统算法相比,本文算法具有更好的识别效果和更强的泛化能力.



2019, 45(9): 1743-1755.
doi: 10.16383/j.aas.2018.c170698
cstr: 32138.14.j.aas.2018.c170698
摘要:
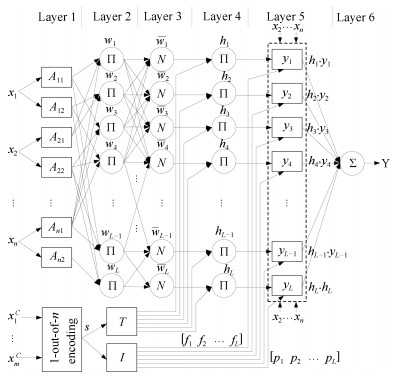
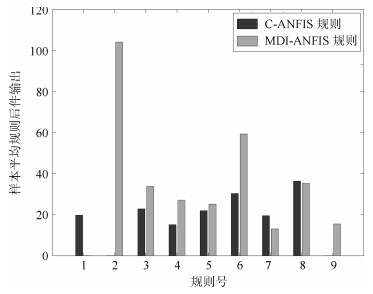
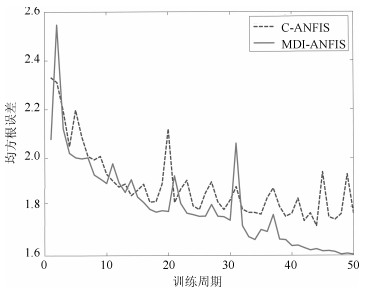
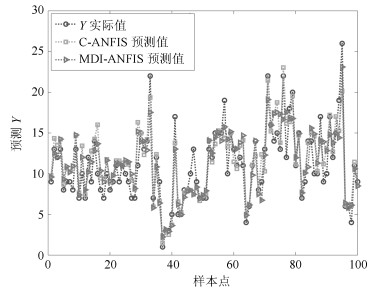
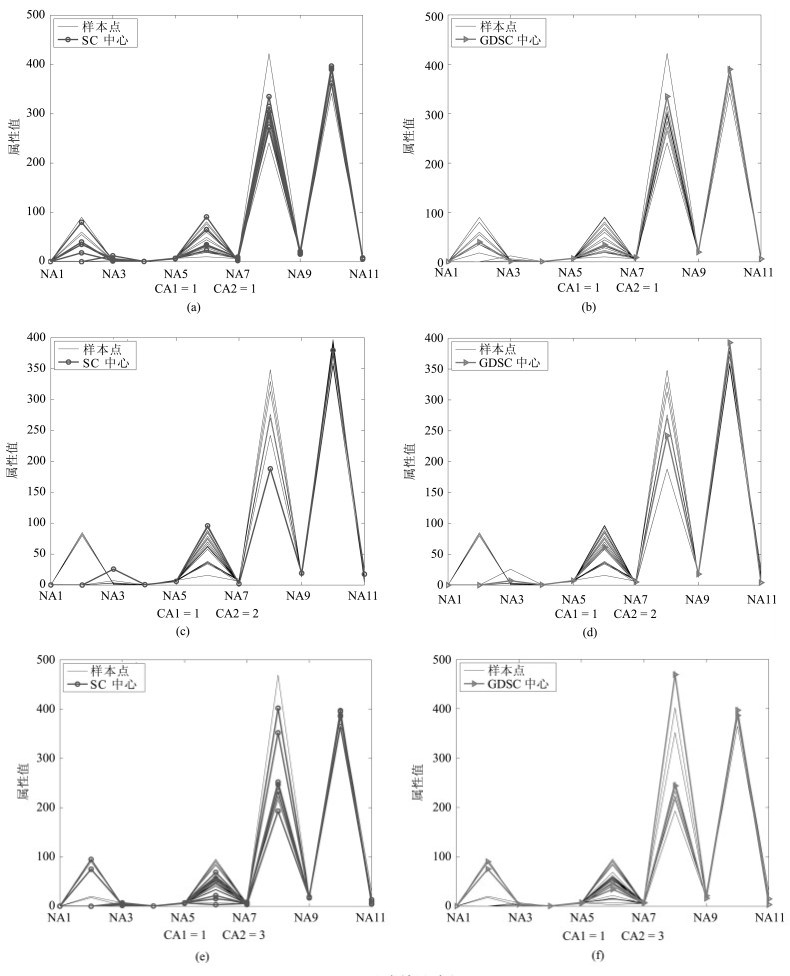
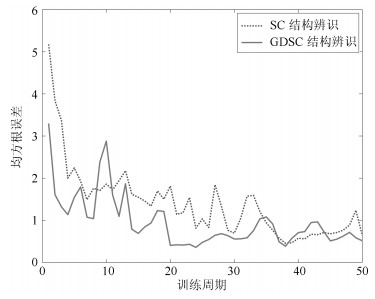
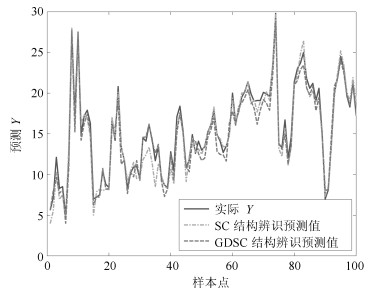
现有数据建模方法大多依赖于定量的数值信息,而对于数值与分类混合输入的数据建模问题往往根据分类变量组合建立多个子模型,当有多个分类变量输入时易出现子模型数据分布不均匀、训练耗时长等问题.针对上述问题,提出一种具有混合数据输入的自适应模糊神经推理系统模型,在自适应模糊推理系统的基础上,引入激励强度转移矩阵和结论影响矩阵,采用基于高氏距离的减法聚类辨识模型结构,通过混合学习算法训练模型参数,使数值与分类混合数据对模糊规则的前后件参数同时产生作用,共同影响模型输出.仿真实验分析了分类数据对模型规则后件的作用以及结构辨识算法对模糊规则数的影响,与其他几种混合数据建模方法对比表明本文所提出的模型具有较高的预测精度和计算效率.
现有数据建模方法大多依赖于定量的数值信息,而对于数值与分类混合输入的数据建模问题往往根据分类变量组合建立多个子模型,当有多个分类变量输入时易出现子模型数据分布不均匀、训练耗时长等问题.针对上述问题,提出一种具有混合数据输入的自适应模糊神经推理系统模型,在自适应模糊推理系统的基础上,引入激励强度转移矩阵和结论影响矩阵,采用基于高氏距离的减法聚类辨识模型结构,通过混合学习算法训练模型参数,使数值与分类混合数据对模糊规则的前后件参数同时产生作用,共同影响模型输出.仿真实验分析了分类数据对模型规则后件的作用以及结构辨识算法对模糊规则数的影响,与其他几种混合数据建模方法对比表明本文所提出的模型具有较高的预测精度和计算效率.
2019, 45(9): 1756-1771.
doi: 10.16383/j.aas.c180425
cstr: 32138.14.j.aas.c180425
摘要:
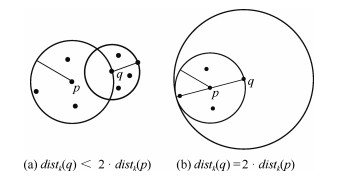
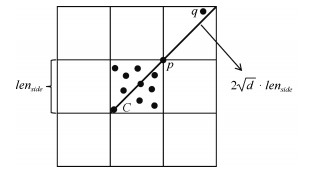
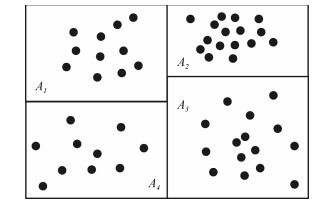
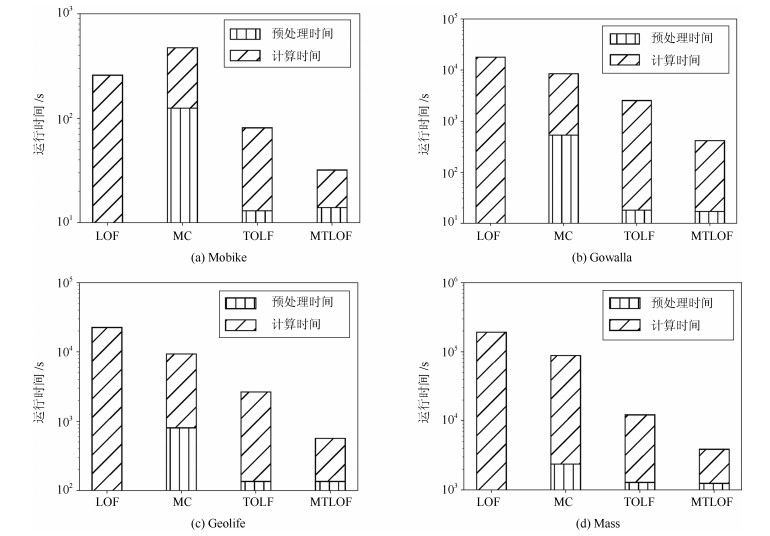
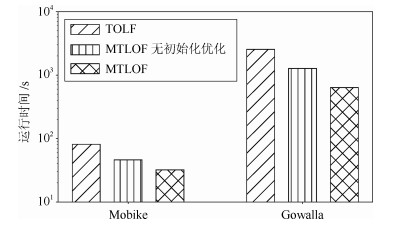
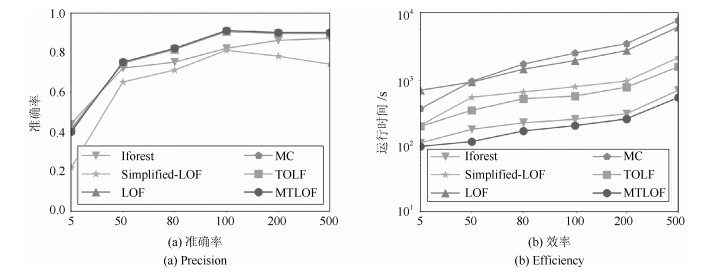
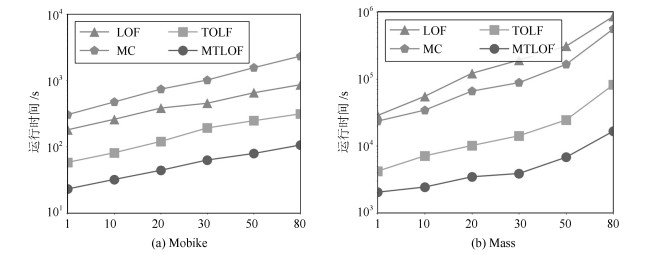
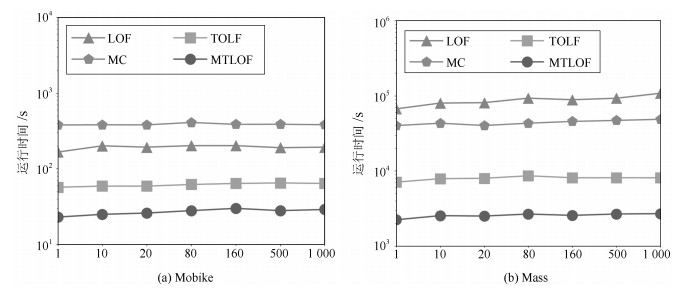
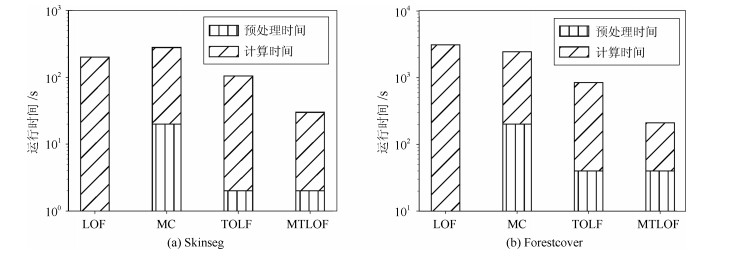
局部异常检测(Local outlier factor,LOF)能够有效解决数据倾斜分布下的异常检测问题,在很多应用领域具有较好的异常检测效果.本文面向大数据异常检测,提出了一种快速的Top-n局部异常点检测算法MTLOF(Multi-granularity upper bound pruning based top-n LOF detection),融合索引结构和多层LOF上界设计了多粒度的剪枝策略,以快速发现Top-n局部异常点.首先,提出了四个更接近真实LOF值的上界,以避免直接计算LOF值,并对它们的计算复杂度进行了理论分析;其次,结合索引结构和UB1、UB2上界,提出了两层的Cell剪枝策略,不仅采用全局Cell剪枝策略,还引入了基于Cell内部数据对象分布的局部剪枝策略,有效解决了高密度区域的剪枝问题;再次,利用所提的UB3和UB4上界,提出了两个更加合理有效的数据对象剪枝策略,UB3和UB4上界更加接近于真实LOF值,有利于剪枝更多数据对象,而基于计算复用的上界计算方法,大大降低了计算成本;最后,优化了初始Top-n局部异常点的选择方法,利用区域划分和建立的索引结构,在数据稀疏区域选择初始局部异常点,有利于将LOF值较大的数据对象选为初始局部异常点,有效提升初始剪枝临界值,使得初始阶段剪枝掉更多的数据对象,进一步提高检测效率.在六个真实数据集上的综合实验评估验证MTLOF算法的高效性和可扩展性,相比最新的TOLF(Top-n LOF)算法,时间效率提升可高达3.5倍.
局部异常检测(Local outlier factor,LOF)能够有效解决数据倾斜分布下的异常检测问题,在很多应用领域具有较好的异常检测效果.本文面向大数据异常检测,提出了一种快速的Top-n局部异常点检测算法MTLOF(Multi-granularity upper bound pruning based top-n LOF detection),融合索引结构和多层LOF上界设计了多粒度的剪枝策略,以快速发现Top-n局部异常点.首先,提出了四个更接近真实LOF值的上界,以避免直接计算LOF值,并对它们的计算复杂度进行了理论分析;其次,结合索引结构和UB1、UB2上界,提出了两层的Cell剪枝策略,不仅采用全局Cell剪枝策略,还引入了基于Cell内部数据对象分布的局部剪枝策略,有效解决了高密度区域的剪枝问题;再次,利用所提的UB3和UB4上界,提出了两个更加合理有效的数据对象剪枝策略,UB3和UB4上界更加接近于真实LOF值,有利于剪枝更多数据对象,而基于计算复用的上界计算方法,大大降低了计算成本;最后,优化了初始Top-n局部异常点的选择方法,利用区域划分和建立的索引结构,在数据稀疏区域选择初始局部异常点,有利于将LOF值较大的数据对象选为初始局部异常点,有效提升初始剪枝临界值,使得初始阶段剪枝掉更多的数据对象,进一步提高检测效率.在六个真实数据集上的综合实验评估验证MTLOF算法的高效性和可扩展性,相比最新的TOLF(Top-n LOF)算法,时间效率提升可高达3.5倍.

2019, 45(9): 1772-1782.
doi: 10.16383/j.aas.c190104
cstr: 32138.14.j.aas.c190104
摘要:
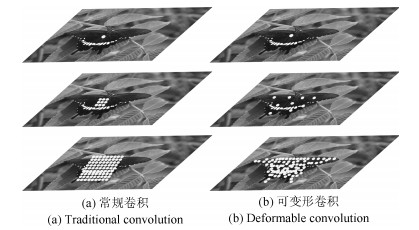
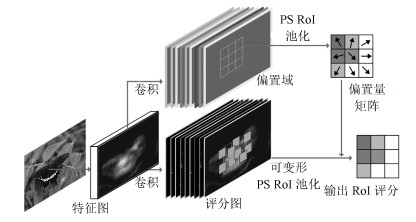
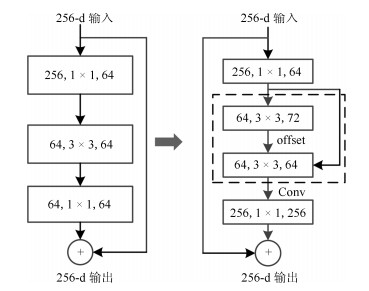
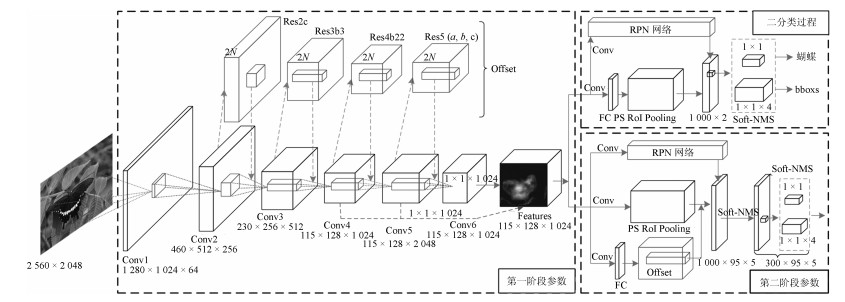
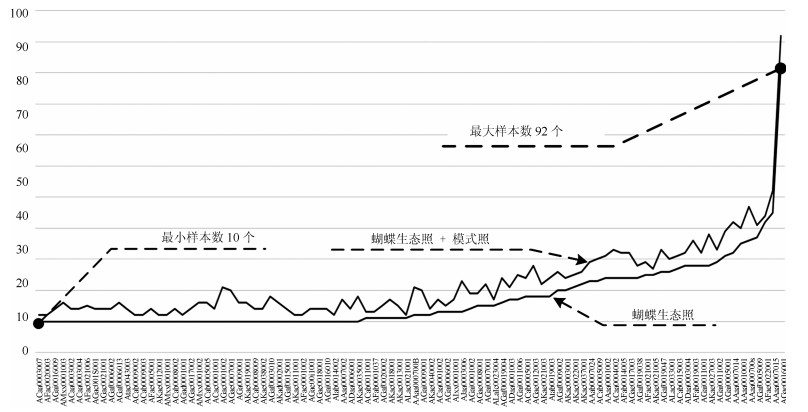
针对自然生态蝴蝶多种特征检测的实际需求,以及生态环境下蝴蝶检测效率低、精度差问题,本文提出了一种基于迁移学习和可变形卷积深度神经网络的蝴蝶检测算法(Transfer learning and deformable convolution deep learning network,TDDNET).该算法首先使用可变形卷积模型重建ResNet-101卷积层,强化特征提取网络对蝴蝶特征的学习,并以此结合区域建议网络(Region proposal network,RPN)构建二分类蝴蝶检测网络,以下简称DNET-base;然后在DNET-base的模型上,构建RPN网络来指导可变形的敏感位置兴趣区域池化层,以便获得多尺度目标的评分特征图和更准确的位置,再由弱化非极大值抑制(Soft non-maximum suppression,Soft-NMS)精准分类形成TDDNET模型.随后通过模型迁移,将DNET-base训练参数迁移至TDDNET,有效降低数据分布不均造成的训练困难与检测性能差的影响,再由Fine-tuning方式快速训练TDDNET多分类网络,最终实现了对蝴蝶的精确检测.所提算法在854张蝴蝶测试集上对蝴蝶检测结果的mAP0.5为0.9414、mAP0.7为0.9235、检出率DR为0.9082以及分类准确率ACC为0.9370,均高于在同等硬件配置环境下的对比算法.对比实验表明,所提算法对生态照蝴蝶可实现较高精度的检测.
针对自然生态蝴蝶多种特征检测的实际需求,以及生态环境下蝴蝶检测效率低、精度差问题,本文提出了一种基于迁移学习和可变形卷积深度神经网络的蝴蝶检测算法(Transfer learning and deformable convolution deep learning network,TDDNET).该算法首先使用可变形卷积模型重建ResNet-101卷积层,强化特征提取网络对蝴蝶特征的学习,并以此结合区域建议网络(Region proposal network,RPN)构建二分类蝴蝶检测网络,以下简称DNET-base;然后在DNET-base的模型上,构建RPN网络来指导可变形的敏感位置兴趣区域池化层,以便获得多尺度目标的评分特征图和更准确的位置,再由弱化非极大值抑制(Soft non-maximum suppression,Soft-NMS)精准分类形成TDDNET模型.随后通过模型迁移,将DNET-base训练参数迁移至TDDNET,有效降低数据分布不均造成的训练困难与检测性能差的影响,再由Fine-tuning方式快速训练TDDNET多分类网络,最终实现了对蝴蝶的精确检测.所提算法在854张蝴蝶测试集上对蝴蝶检测结果的mAP0.5为0.9414、mAP0.7为0.9235、检出率DR为0.9082以及分类准确率ACC为0.9370,均高于在同等硬件配置环境下的对比算法.对比实验表明,所提算法对生态照蝴蝶可实现较高精度的检测.






2019, 45(9): 1783-1790.
doi: 10.16383/j.aas.2018.c170571
cstr: 32138.14.j.aas.2018.c170571
摘要:
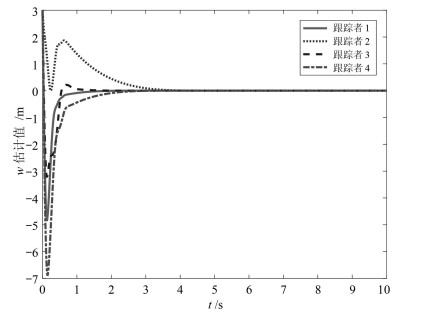
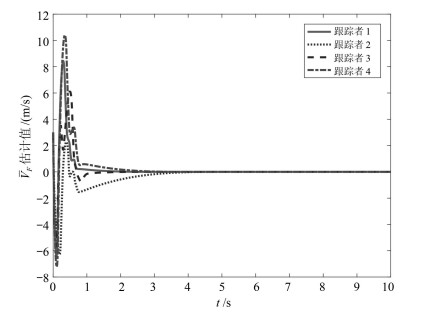
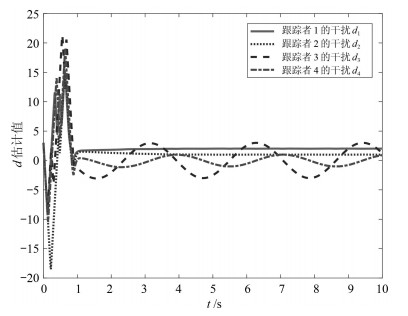
针对多自主体系统群集运动问题,本文研究了带有不匹配干扰的二阶系统有限时间包容控制.运用现代控制理论,设计了非线性观测器,对系统未知状态和干扰进行估计.在状态估计的基础上,构建了基于干扰观测器的多自主体系统的协同控制算法.应用代数图论和齐次性理论等方法,分析了二阶多自主体系统有限时间包容控制.数据仿真中应用基于观测器的包容控制算法,使得系统的运动状态最终都收敛到由多个领导者所围成的目标区域中,验证了本文结果的有效性.
针对多自主体系统群集运动问题,本文研究了带有不匹配干扰的二阶系统有限时间包容控制.运用现代控制理论,设计了非线性观测器,对系统未知状态和干扰进行估计.在状态估计的基础上,构建了基于干扰观测器的多自主体系统的协同控制算法.应用代数图论和齐次性理论等方法,分析了二阶多自主体系统有限时间包容控制.数据仿真中应用基于观测器的包容控制算法,使得系统的运动状态最终都收敛到由多个领导者所围成的目标区域中,验证了本文结果的有效性.



2019, 45(9): 1791-1798.
doi: 10.16383/j.aas.2018.c170281
cstr: 32138.14.j.aas.2018.c170281
摘要:
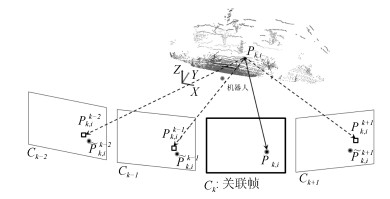
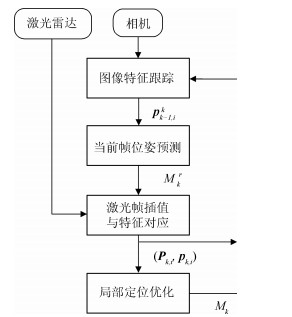
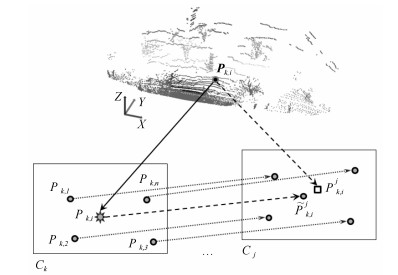
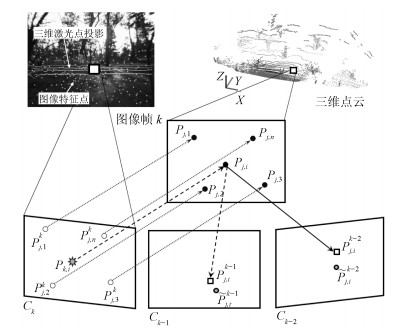
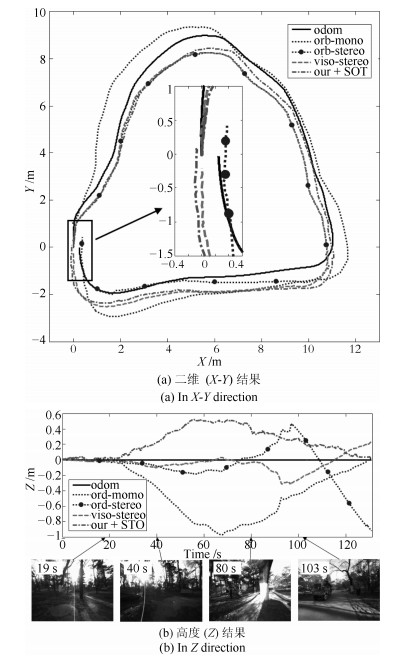
定位是机器人导航的关键问题,在缺乏结构信息的室外非结构化环境下,精确的三维定位面临更大挑战.本文提出一种基于相机与摇摆激光雷达融合的定位算法,重点解决在光照,地面起伏等因素影响下的机器人定位问题.本文结合激光雷达的深度信息和图像的颜色纹理信息,构建在时序帧间的特征点匹配关系;引入一种置信度评价方法,结合系统误差、数据关联、物体遮挡、特征跟踪等因素对特征点及其匹配关系进行评估,减少低质量特征的影响;最终将定位问题转化为特征点对的加权重投影误差优化问题予以解决.本文利用小型轮式移动机器人在越野和公园等典型非结构化环境下进行数据采集和实验验证.实验结果表明,与前沿的视觉定位算法相比,本文算法可有效提高在非结构化环境中的定位精度.
定位是机器人导航的关键问题,在缺乏结构信息的室外非结构化环境下,精确的三维定位面临更大挑战.本文提出一种基于相机与摇摆激光雷达融合的定位算法,重点解决在光照,地面起伏等因素影响下的机器人定位问题.本文结合激光雷达的深度信息和图像的颜色纹理信息,构建在时序帧间的特征点匹配关系;引入一种置信度评价方法,结合系统误差、数据关联、物体遮挡、特征跟踪等因素对特征点及其匹配关系进行评估,减少低质量特征的影响;最终将定位问题转化为特征点对的加权重投影误差优化问题予以解决.本文利用小型轮式移动机器人在越野和公园等典型非结构化环境下进行数据采集和实验验证.实验结果表明,与前沿的视觉定位算法相比,本文算法可有效提高在非结构化环境中的定位精度.