

-
摘要: 本文首先介绍了网络仿真技术的概念、特点和发展现状,在此基础上介绍了当前主流的通用型网络仿真软件的主要特点并对它们进行了对比分析和评价.为了解决现有网络架构灵活性和服务能力差的问题,我们引入了面向大数据建模、能够对网络整体状态进行预测和实时优化的平行网络架构及其计算实验平台.该平台融合虚拟的人工网络和实际网络的数据并对其进行实验分析和评估,可以发现最优的控制方案.基于平行网络计算实验方法,本文设计了针对微信朋友圈转发预测的网络优化方法,并通过实验验证了该方法可以有效提升网络的性能.Abstract: In this paper, the current network experiment platforms are investigated, introduced and compared. The most popularly used simulator and its main advantages and disadvantages are demonstrated. To solve the problem of lacking flexibility and service capability of traditional network experiment platforms, based on the parallel network architecture, the corresponding computational experiment platform is proposed. The proposed platform is data-oriented, and by using the computational experiments and analysis, an optimized control strategy can be continuously updated and tracked, thus the self optimization of network systems is achieved. In the end, a computational experiment based on retweet analysis of Wechat Moments is proposed, and the effectiveness of this method is evaluated.1) 本文责任编委 王卓
-
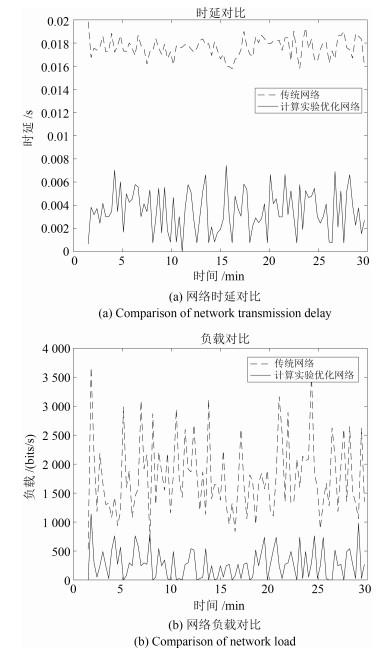
图 7 传统网络与计算实验优化性能对比
Fig. 7 Performance comparison of traditional method and parallel network computational experiment
表 1 常用仿真软件分类
Table 1 Common simulators classification
通用型 无线传感网 P2P网络 车载自组网 NS-2 SensorSim QueryCycle GrooveNet NS-3 Castalia Narses TraNS GlomoSim VisualSense 3LS NCTUns OMNeT++ Viptos NeuroGrid MOVE OPNET Sidh Peersim VANET MobiSim JiST/SWANS Prowler P2PSim Veins GTNetS Nsrlsensorsim SimP2 – SSFNet – – –  下载: 导出CSV
下载: 导出CSV
表 2 NS-2和NS-3的比较
Table 2 Comparison of NS-2 and NS-3
NS-2 NS-3 开源 开源 用户自定义模型困难 用户自定义模型容易 大量的用户贡献工具 少量的用户贡献工具 双语言编写(C++, Otcl) 单语言编写(C++) 编程能力要求高 编程能力要求适中 现有模型支持大量的协议 现有模型支持少量的协议
下载: 导出CSV
表 3 JiST/SWANS与GlomoSim和NS-2的性能对比
Table 3 Comparison of JiST/SWANS, GlomoSim and NS-2
节点数 仿真器 耗时 内存消耗 500 SWANS 43 s 1 101 KB GlomoSim 82 s 5 759 KB NS-2 7136 s 5 8761 KB 5 000 SWANS 430 s 5 284 KB GlomoSim 6191 s 27 570 KB 50 000 SWANS 4 377 s 49 262 KB 1 000 000 SWANS – 933 MB
下载: 导出CSV
表 4 仿真软件性能对比
Table 4 Performance comparison of simulators
软件名称 编程语言 平台 开源 内存消耗 速度 灵活性 可扩展性 易用性 NS-2 C++, Otcl 跨平台 开源 * * * ** * NS-3 C++ 跨平台 开源 *** *** ** *** *** GlomoSim Parsec Linux 开源 ** ** * *** ** QualNet Parsec 跨平台 不开源 ** ** * * *** OMNeT++ C++ 跨平台 开源 * ** ** *** ** OPNET C++ 跨平台 不开源 ** * ** * *** J-SIM Java 跨平台 开源 ** ** *** *** ** JiST/SWANS Java 跨平台 开源 *** *** *** ** ** GTNetS C++ Linux 开源 – – ** ** * SSFNet Java 跨平台 开源 – – * ** ** Mininet Python Linux 开源 ** ** *** *** ** EstiNet – Linux 不开源 *** *** ** * **
下载: 导出CSV
表 5 转发预测召回率
Table 5 Recall rate of retweet prediction
线性分类器 决策树 SVM 随机森林 历史转发频度 5.6 71.09 89.9 71.09 浏览时间+历史转发频度 5.6 71.23 92.07 0 浏览页数/总页数+历史转发频度 5.7 71.09 3.03 0 浏览时间+浏览页数/总页数+历史转发频度 5.91 71.09 2.38 57.1
下载: 导出CSV
-
[1] 王飞跃, 杨柳青, 胡晓娅, 程翔, 韩双双, 杨坚.平行网络与网络软件化:一种新颖的网络架构.中国科学:信息科学, 2017, 47(7):811-831 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201707001.htmWang Fei-Yue, Yang Liu-Qing, Hu Xiao-Ya, Cheng Xiang, Han Shuang-Shuang, Yang Jian. Parallel networks and network softwarization:a novel network architecture. Scientia Sinica Informationis, 2017, 47(7):811-831 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201707001.htm [2] 俞晨, 王延年.计算机网络应用的现状与展望.信息与电脑(理论版), 2018, (9):168-169 http://www.cnki.com.cn/Article/CJFDTotal-XXDL201809067.htmYu Chen, Wang Yan-Nian. The status and prospect of computer network application. China Computer & Communication, 2018, (9):168-169 http://www.cnki.com.cn/Article/CJFDTotal-XXDL201809067.htm [3] 杨仁宇, 韩毅刚, 章帆, 冯飞.基于SDN的内容中心网络研究综述.计算机科学, 2019, 46(1):13-20 http://d.old.wanfangdata.com.cn/Periodical/jsjkx201901003Yang Ren-Yu, Han Yi-Gang, Zhang Fan, Feng Fei. Survey of content centric network based on SDN. Computer Science, 2019, 46(1):13-20 http://d.old.wanfangdata.com.cn/Periodical/jsjkx201901003 [4] Breslau L, Estrin D, Fall K, Floyd S, Heidemann J, Helmy A, et al. Advances in network simulation. Computer, 2000, 33(5):59-67 doi: 10.1109/2.841785 [5] 方维维, 王锐.网络模拟和仿真技术.计算机教育, 2005, (12):51-54 doi: 10.3969/j.issn.1672-5913.2005.12.017 [6] 侯宗浩, 王秉康, 黄泳翔.网络仿真的研究.计算机仿真, 2003, 20(10):89-91, 136 doi: 10.3969/j.issn.1006-9348.2003.10.029Hou Zong-Hao, Wang Bing-Kang, Huang Yong-Xiang. Research of the network simulation. Computer Simulation, 2003, 20(10):89-91, 136 doi: 10.3969/j.issn.1006-9348.2003.10.029 [7] 吕方瑶.当前主要网络仿真工具研究和实践.信息通信, 2011, (4):3-5 doi: 10.3969/j.issn.1673-1131.2011.04.002 [8] Heidemann J, Mills K, Kumar S. Expanding confidence in network simulations. IEEE Network, 2001, 15(5):58-63 doi: 10.1109/65.953234 [9] Mehta S, Sulatan N, Kwak K S. Network and system simulation tools for next generation networks:a case study. Modelling, Simulation and Identification. InTech, 2010. [10] 袁晓, 蔡志平, 刘书昊, 喻颖.大规模网络仿真软件及其仿真技术.计算机技术与发展, 2014, (7):9-12 http://d.old.wanfangdata.com.cn/Periodical/wjfz201407003Yuan Xiao, Cai Zhi-Ping, Liu Shu-Hao, Yu Ying. Large-scale network emulation software and its key technologies. Computer Technology and Development, 2014, (7):9-12 http://d.old.wanfangdata.com.cn/Periodical/wjfz201407003 [11] 张贤军, 李鹤.计算机网络仿真技术及仿真工具.舰船电子工程, 2013, 33(1):25-27 doi: 10.3969/j.issn.1627-9730.2013.01.009Zhang Xian-Jun, Li He. Computer network simulation technology and simulation tools. Ship Electronic Engineering, 2013, 33(1):25-27 doi: 10.3969/j.issn.1627-9730.2013.01.009 [12] Siraj S, Gupta A K, Badgujar R. Network simulation tools survey. International Journal of Advanced Research in Computer and Communication Engineering, 2012, 1(4):201-210 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0232114831/ [13] Issariyakul T, Hossain E. Introduction to network simulator 2(NS2). Introduction to Network Simulator NS2. Boston, MA:Springer, 2012. 21-40 [14] 茹新宇, 刘渊.网络仿真器NS3的剖析与探究.计算机技术与发展, 2018, 28(3):72-77 doi: 10.3969/j.issn.1673-629X.2018.03.015Ru Xin-Yu, Liu Yuan. Analysis and research on network simulator 3. Computer Technology and Development, 2018, 28(3):72-77 doi: 10.3969/j.issn.1673-629X.2018.03.015 [15] Bagrodia R, Meyer R, Takai M, Chen Y A, Zeng X, Martin J, et al. Parsec:a parallel simulation environment for complex systems. Computer, 1998, 31(10):77-85 doi: 10.1109/2.722293 [16] Zeng X, Bagrodia R, Gerla M. GloMoSim:a library for parallel simulation of large-scale wireless networks. ACM SIGSIM Simulation Digest, 1998, 28(1):154-161 doi: 10.1145/278009.278027 [17] Farooq J, Rauf B. Implementation and Evaluation of IEEE 802.11e Wireless LAN in GloMoSim. Department of Computing Science Umea University Sweden, 2006. [18] 杨路明, 李谢华.网络仿真软件比较分析及仿真过程探讨.计算技术与自动化, 2002, 21(4):65-70 doi: 10.3969/j.issn.1003-6199.2002.04.015Yang Lu-Ming, Li Xie-Hua. Comparison & analysis of network simulators and discussion on process of network simulation. Computing Technology and Automation, 2002, 21(4):65-70 doi: 10.3969/j.issn.1003-6199.2002.04.015 [19] Spaho E, Barolli L, Mino G, Xhafa F, Kolici F. VANET simulators:a survey on mobility and routing protocols. In:Proceedings of the 2011 International Conference on Broadband and Wireless Computing, Communication and Applications. Barcelona, Spain:IEEE, 2011. 1-10 [20] 石怀伟, 王华, 张念军, 赵林胜, 佀同光. OPNET网络仿真技术及其应用分析.计算机工程与设计, 2006, 27(17):3309-3311 doi: 10.3969/j.issn.1000-7024.2006.17.064Shi Huai-Wei, Wang Hua, Zhang Nian-Jun, Zhao Lin-Sheng, Si Tong-Guang. Analysis of OPNET simulation technology and its application. Computer Engineering and Design, 2006, 27(17):3309-3311 doi: 10.3969/j.issn.1000-7024.2006.17.064 [21] Kumar A, Kaushik S K, Sharma R, Raj P. Simulators for wireless networks:a comparative study. In:Proceedings of the 2012 IEEE International Conference on Computing Sciences. Phagwara, India:IEEE, 2012. 338-342 [22] 陈敏. OPNET物联网仿真.武汉:华中科技大学出版社, 2015. 55-75Chen Min. OPNET IOT Simulation. Wuhan:Huazhong University of Science and Technology Press, 2015. 55-75 [23] 陈敏. OPNET网络仿真.北京:清华大学出版社, 2004. 48-53 [24] 周慧. OPNET网络仿真及其应用研究[硕士学位论文], 武汉科技大学, 中国, 2009. 15-18 http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1546288Zhou Hui. The Study of OPNET Simulation and its Application[Master thesis], Wuhan University of Science and Technology, China, 2009. 15-18 http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1546288 [25] Miller J A, Nair R S, Zhang Z, Zhao H. JSIM:a JAVA-based simulation and animation environment. In:Proceedings of IEEE 30th Annual Proceedings of Simulation Symposium. Atlanta, Georgia, USA:IEEE, 1997. 31-42 [26] Cao N, Liu P Z, Li G F, Zhang C, Cao S H, Cao G S, et al. Evaluation models for the nearest closer routing protocol in wireless sensor networks. IEEE Access, 2018, 6:77043-77054 doi: 10.1109/ACCESS.2018.2825441 [27] Kargl F, Schoch E. Simulation of MANETs:a qualitative comparison between JiST/SWANS and NS-2. In:Proceedings of the 1st International Workshop on System Evaluation for Mobile Platforms. San Juan, Puerto Rico:IEEE, 2007. 41-46 [28] Barr R, Haas Z J, van Renesse R. JiST:an efficient approach to simulation using virtual machines. Software:Practice and Experience, 2005, 35(6):539-576 doi: 10.1002/spe.647 [29] Riley G F. The Georgia tech network simulator. In:Proceedings of the 2003 ACM SIGCOMM Workshop on Models, Methods and Tools for Reproducible Network Research. Karlsruhe, Germany:ACM, 2003. 5-12 [30] 刘涛, 聂晓峰, 荆继武, 王跃武.基于小型对象分配技术的GTNetS蠕虫仿真内存管理.中国科学院大学学报, 2012, 29(1):131-135 http://d.old.wanfangdata.com.cn/Periodical/zgkxyyjsyxb201201019Liu Tao, Nie Xiao-Feng, Jing Ji-Wu, Wang Yue-Wu. Memory management in worm simulation based on small object memory allocation technique on the GTNetS. Journal of Graduate University of Chinese Academy of Sciences, 2012, 29(1):131-135 http://d.old.wanfangdata.com.cn/Periodical/zgkxyyjsyxb201201019 [31] Cowie J, Ogielski A, Nicol D. The SSFNet network simulator[Online], http://www.ssfnet.org/homePage.html, 2002 [32] Yoon S, Kim Y B. A design of network simulation environment using SSFNet. In:Proceedings of the 1st International Conference on Advances in System Simulation. Porto, Portugal:IEEE, 2009. 73-78 [33] 杨俊东, 尹强, 张硕.基于Mininet的SDN仿真与性能分析.信息通信, 2017, (3):189-191 doi: 10.3969/j.issn.1673-1131.2017.03.100Yang Jun-Dong, Yin Qiang, Zhang Shuo. Simulation and performance analysis of SDN based on Mininet. Information & Communications, 2017, (3):189-191 doi: 10.3969/j.issn.1673-1131.2017.03.100 [34] Wang S Y. Comparison of SDN OpenFlow network simulator and emulators:EstiNet vs. Mininet. In:Proceedings of the 2014 IEEE Symposium on Computers and Communication. Funchal, Portugal:IEEE, 2014. 1-6 [35] Wang S Y, Chou C L, Yang C M. EstiNet openflow network simulator and emulator. IEEE Communications Magazine, 2013, 51(9):110-117 doi: 10.1109/MCOM.2013.6588659 [36] Imran M, Said A M, Hasbullah H. A survey of simulators, emulators and testbeds for wireless sensor networks. In:Proceedings of the 2010 International Symposium on Information Technology. Kuala Lumpur, Malaysia:IEEE, 2010. 897-902 [37] Zhou S J, Zhou Y H, Luo J Q. Research on simulators for peer-to-peer systems. In:Proceedings of the 2013 IEEE 3rd International Conference on Computer Science and Network Technology. Dalian, China:IEEE, 2013. 726-731 [38] Owczarek P, Zwierzykowski P. Review of simulators for wireless mesh networks. Journal of Telecommunications Information Technology, 2014, 14(3):82-89 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a7fca6901e4f97c85762a983b7925117 [39] 王润民, 邓晓峰, 徐志刚, 赵祥模.车联网仿真测试评价技术研究综述.计算机应用研究, 2019, (7):1-9 http://www.cnki.com.cn/Article/CJFDTotal-JSYJ2018070900M.htmWang Run-Min, Deng Xiao-Feng, Xu Zhi-Gang, Zhao Xiang-Mo. Survey on simulation testing and evaluation of internet of vehicles. Application Research of Computers, 2019, (7):1-9 http://www.cnki.com.cn/Article/CJFDTotal-JSYJ2018070900M.htm [40] McKeown N. Software-defined networking. INFOCOM Keynote Talk, 2009, 17(2):30-32 http://d.old.wanfangdata.com.cn/Periodical/rjxb201501006 [41] 王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5):485-489 doi: 10.3321/j.issn:1001-0920.2004.05.002Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5):485-489 doi: 10.3321/j.issn:1001-0920.2004.05.002 [42] Shen D Y, Wang X, Wang J, Guan X Y, Yang P H, Xu L. Parallel intermodal road-rail transportation system based on ACP approach. In:Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics. Banff, Canada:IEEE, 2017. 444-449 [43] 王飞跃.人工社会、计算实验、平行系统——关于复杂社会经济系统计算研究的讨论.复杂系统与复杂性科学, 2004, 1(4):25-35 doi: 10.3969/j.issn.1672-3813.2004.04.002Wang Fei-Yue. Artificial societies, computational experiments, and parallel systems:a discussion on computational theory of complex social-economic systems. Complex Systems and Complexity Science, 2004, 1(4):25-35 doi: 10.3969/j.issn.1672-3813.2004.04.002 [44] 王飞跃, 杨坚, 韩双双, 杨柳青, 程翔.基于平行系统理论的平行网络架构.指挥与控制学报, 2016, 2(1):71-77 http://d.old.wanfangdata.com.cn/Periodical/zhykzxb201601012Wang Fei-Yue, Yang Jian, Han Shuang-Shuang, Yang Liu-Qing, Cheng Xiang. The framework of parallel network based on the parallel system theory. Journal of Command & Control, 2016, 2(1):71-77 http://d.old.wanfangdata.com.cn/Periodical/zhykzxb201601012 [45] Wang F Y, Yang L Q, Cheng X, Han S S, Yang J. Network softwarization and parallel networks:beyond software-defined networks. IEEE Network, 2016, 30(4):60-65 doi: 10.1109/MNET.2016.7513865 [46] 王飞跃, 王晓, 袁勇, 王涛, 林懿伦.社会计算与计算社会:智慧社会的基础与必然.科学通报, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/jsjyjyfz201312002Wang Fei-Yue, Wang Xiao, Yuan Yong, Wang Tao, Lin Yi-Lun. Social computing and computational societies:the foundation and consequence of smart societies. Chinese Science Bulletin, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/jsjyjyfz201312002 [47] 刘烁, 王帅, 孟庆振, 叶佩军, 王涛, 黄文林, 等.基于ACP行为动力学的犯罪主体行为平行建模分析.自动化学报, 2018, 44(2):251-261 http://www.aas.net.cn/CN/abstract/abstract19220.shtmlLiu Shuo, Wang Shuai, Meng Qing-Zhen, Ye Pei-Jun, Wang Tao, Huang Wen-Lin, et al. Parallel modeling of criminal subjects behavior based on ACP behavioral dynamics. Acta Automatica Sinica, 2018, 44(2):251-261 http://www.aas.net.cn/CN/abstract/abstract19220.shtml [48] Zhang W W, Wang K F, Qu H, Zhao J H, Wang F Y. Scene-specific pedestrian detection based on parallel vision. arXiv preprint arXiv:1712.08745, 2017. [49] 袁勇, 王飞跃.平行区块链:概念、方法与内涵解析.自动化学报, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtmlYuan Yong, Wang Fei-Yue. Parallel Blockchain:concept, methods and issues. Acta Automatica Sinica, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtml [50] 刘昕, 王晓, 张卫山, 汪建基, 王飞跃.平行数据:从大数据到数据智能.模式识别与人工智能, 2017, 30(8):673-681 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201708001Liu Xin, Wang Xiao, Zhang Wei-Shan, Wang Jian-Ji, Wang Fei-Yue. Parallel data:from big data to data intelligence. Pattern Recognition & Artificial Intelligence, 2017, 30(8):673-681 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201708001 [51] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习-机器学习的一个新型理论框架.自动化学报, 2017, 43(1):1-8 doi: 10.3969/j.issn.1003-8930.2017.01.001Li Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning:a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1):1-8 doi: 10.3969/j.issn.1003-8930.2017.01.001 [52] 王飞跃, 张梅, 孟祥冰, 王蓉, 王晓, 张志成, 等.平行手术:基于ACP的智能手术计算方法.模式识别与人工智能, 2017, 30(11):961-970 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201711001Wang Fei-Yue, Zhang Mei, Meng Xiang-Bing, Wang Rong, Wang Xiao, Zhang Zhi-Cheng, et al. Parallel surgery:an ACP-based approach for intelligent operations. Pattern Recognition & Artificial Intelligence, 2017, 30(11):961-970 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201711001 [53] 王飞跃, 高彦臣, 商秀芹, 张俊.平行制造与工业5.0:从虚拟制造到智能制造.科技导报, 2018, 36(21):10-22 http://d.old.wanfangdata.com.cn/Periodical/dqgy201502004Wang Fei-Yue, Gao Yan-Chen, Shang Xiu-Qin, Zhang Jun. Parallel manufacturing and industries 5.0:from virtual manufacturing to intelligent manufacturing. Science & Technology Review, 2018, 36(21):10-22 http://d.old.wanfangdata.com.cn/Periodical/dqgy201502004 [54] 孟祥冰, 王蓉, 张梅, 王飞跃.平行感知:ACP理论在视觉SLAM技术中的应用.指挥与控制学报, 2017, 3(4):350-358 doi: 10.3969/j.issn.2096-0204.2017.04.0350Meng Xiang-Bing, Wang Rong, Zhang Mei, Wang Fei-Yue. Parallel perception:an ACP-based approach to visual SLAM. Journal of Command and Control, 2017, 3(4):350-358 doi: 10.3969/j.issn.2096-0204.2017.04.0350 [55] 杨柳青, 王飞跃, 张艳丽, 韩双双, 杨坚, 赵恺, 等.基于ACP方法的城市平行停车系统.指挥与控制学报, 2015, 1(4):384-390 http://d.old.wanfangdata.com.cn/Periodical/zhykzxb201504003Yang Liu-Qing, Wang Fei-Yue, Zhang Yan-Li, Han Shuang-Shuang, Yang Jian, Zhao Kai, et al. The urban parallel parking system based on ACP approach. Journal of Command and Control, 2015, 1(4):384-390 http://d.old.wanfangdata.com.cn/Periodical/zhykzxb201504003 [56] 王晓, 要婷婷, 韩双双, 曹东璞, 王飞跃.平行车联网:基于ACP的智能车辆网联管理与控制.自动化学报, 2018, 44(8):1391-1404 http://www.aas.net.cn/CN/abstract/abstract19324.shtmlWang Xiao, Yao Ting-Ting, Han Shuang-Shuang, Cao Dong-Pu, Wang Fei-Yue. Parallel internet of vehicles:the ACP-based networked management and control for intelligent vehicles. Acta Automatica Sinica, 2018, 44(8):1391-1404 http://www.aas.net.cn/CN/abstract/abstract19324.shtml [57] 王飞跃, 孙奇, 江国进, 谭珂, 张俊, 侯家琛, 等.核能5.0:智能时代的核电工业新形态与体系架构.自动化学报, 2018, 44(5):922-934 http://www.aas.net.cn/CN/abstract/abstract19283.shtmlWang Fei-Yue, Sun Qi, Jiang Guo-Jin, Tan Ke, Zhang Jun, Hou Jia-Chen, et al. Nuclear Energy 5.0:new formation and system architecture of nuclear power industry in the new IT era. Acta Automatica Sinica, 2018, 44(5):922-934 http://www.aas.net.cn/CN/abstract/abstract19283.shtml [58] 白天翔, 王帅, 沈震, 曹东璞, 郑南宁, 王飞跃.平行机器人与平行无人系统:框架、结构、过程、平台及其应用.自动化学报, 2017, 43(2):161-175 http://www.aas.net.cn/CN/abstract/abstract18998.shtmlBai Tian-Xiang, Wang Shuai, Shen Zhen, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel robotics and parallel unmanned systems:framework, structure, process, platform and applications. Acta Automatica Sinica, 2017, 43(2):161-175 http://www.aas.net.cn/CN/abstract/abstract18998.shtml [59] 王飞跃, 李长贵, 国元元, 王静, 王晓, 邱天雨, 等.平行高特:基于ACP的平行痛风诊疗系统框架.模式识别与人工智能, 2017, 30(12):1057-1068 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201712001Wang Fei-Yue, Li Chang-Gui, Guo Yuan-Yuan, Wang Jing, Wang Xiao, Qiu Tian-Yu, et al. Parallel gout:an ACP-based system framework for gout diagnosis and treatment. Pattern Recognition and Artificial Intelligence, 2017, 30(12):1057-1068 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201712001 [60] 刘志杰, 欧阳云呈, 宋宇骅, 贺威, 王飞跃.分布参数系统的平行控制:从基于模型的控制到数据驱动的智能控制.指挥与控制学报, 2017, 3(3):177-185 doi: 10.3969/j.issn.2096-0204.2017.03.0177Liu Zhi-Jie, Ouyang Yun-Cheng, Song Yu-Hua, He Wei, Wang Fei-Yue. Parallel control of distributed parameter systems:from model based control to data driven intelligent control. Journal of Command & Control, 2017, 3(3):177-185 doi: 10.3969/j.issn.2096-0204.2017.03.0177 [61] 尹培丽, 王建华, 陈阳泉, 王飞跃.平行测量:复杂测量系统的一个新型理论框架及案例研究.自动化学报, 2018, 44(3):425-433 http://www.aas.net.cn/CN/abstract/abstract19235.shtmlYin Pei-Li, Wang Jian-Hua, Chen Yang-Quan, Wang Fei-Yue. Parallel measurements:a new theory and framework for complex measurement system and a case study. Acta Automatica Sinica, 2018, 44(3):425-433 http://www.aas.net.cn/CN/abstract/abstract19235.shtml [62] Floyd S, Paxson V. Difficulties in simulating the Internet. IEEE/ACM Transactions on Networking, 2001, 9(4):392-403 doi: 10.1109/90.944338 [63] Gehrke J, Madden S. Query processing in sensor networks. IEEE Pervasive Computing, 2004, 3(1):46-55 doi: 10.1109/MPRV.2004.1269131 [64] Lu S W, Schormans J A. Simulation acceleration techniques for mobile ad hoc networks. In:Proceedings of the 2003 London Communications Symposium. London, UK:IEEE, 2003. 9-14 [65] Hogie L, Bouvry P, Guinand F. An verview of MANETs simulation. Electronic Notes in Theoretical Computer Science, 2006, 150(1):81-101 doi: 10.1016/j.entcs.2005.12.025 [66] Lessmann J, Janacik P, Lachev L, Orfanus D. Comparative study of wireless network simulators. In:Proceedings of the 7th International Conference on Networking. Cancun, Mexico:IEEE, 2008. 517-523 [67] Suliman I A, Abdalla G M T. Comparative study of wireless LAN using OPNET and NS-2. In:Proceedings of the 2016 IEEE Conference of Basic Sciences and Engineering Studies. Khartoum, Sudan:IEEE, 2016. 196-200 [68] da Fontoura A C, de Oliveira Schmidt R, Trentin M A S. Simulation of Ad-hoc routing protocols in an interurban university mesh network. IEEE Latin America Transactions, 2009, 7(1):122-125 doi: 10.1109/TLA.2009.5173474 [69] 王波, 周志伟.网络模拟软件NS2与OPNET的剖析比较.计算机系统应用, 2010, 19(6):90-95 doi: 10.3969/j.issn.1003-3254.2010.06.023Wang Bo, Zhou Zhi-Wei. Comparative analysis on network simulation software NS2 and OPNET. Computer Systems & Applications, 2010, 19(6):90-95 doi: 10.3969/j.issn.1003-3254.2010.06.023 [70] Weingartner E, Vom Lehn H, Wehrle K. A performance comparison of recent network simulators. In:Proceedings of the 2009 IEEE International Conference on Communications. Dresden, Germany:IEEE, 2009. 1-5 [71] Walsh K, Sirer E G. Staged simulation:a general technique for improving simulation scale and performance. ACM Transactions on Modeling and Computer Simulation, 2004, 14(2):170-195 doi: 10.1145/985793.985797 [72] Li Z, Guo G, Chen B, Qiu X G. Accelerating large scale artificial society simulation with CPU/GPU based heterogeneous parallel method. In:Proceedings of the 19th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications. Chengdu, China:IEEE, 2015. 155-162 [73] Lin S M, Cheng X Q, Lv J M. A visualized parallel network simulator for modeling large-scale distributed applications. In:Proceedings of the 2007 Eighth International Conference on Parallel and Distributed Computing, Applications and Technologies. Adelaide, Australia:IEEE, 2007. 339-346 [74] Jin D, Zheng Y, Nicol D M. A parallel network simulation and virtual time-based network emulation testbed. Journal of Simulation, 2014, 8(3):206-214 doi: 10.1057/jos.2013.29 [75] White B, Lepreau J, Stoller L, Ricci R, Guruprasad S, Newbold M, et al. An integrated experimental environment for distributed systems and networks. ACM SIGOPS Operating Systems Review, 2002, 36(SI):255-270 doi: 10.1145/844128.844152 [76] Yang F, Wang Z K, Chen J Y, Liu Y J. Design of parallel packet switch simulation system based on NS2. In:Proceedings of the 5th International Conference on Wireless Communications, Networking and Mobile Computing. Beijing, China:IEEE, 2009. 1-4 [77] Gawlowicz P, Zubow A. ns3-gym:extending OpenAI gym for networking research. arXiv preprint arXiv:1810.03943, 2018 [78] 王磊.基于机器学习技术的LTE网络智能优化系统设计.电信工程技术与标准化, 2018, (1):39-42 doi: 10.3969/j.issn.1008-5599.2018.01.010Wang Lei. Intelligent LTE configuration optimization system based on machine learning technology. Telecom Engineering Technics and Standardization, 2018, (1):39-42 doi: 10.3969/j.issn.1008-5599.2018.01.010 [79] Wang X, Zeng K, Zhao X L, Wang F Y. Using web data to enhance traffic situation awareness. In:Proceedings of the 17th International Conference on Intelligent Transportation Systems. Qingdao, China:IEEE, 2014. 195-199 [80] Zeng K, Liu W L, Wang X, Chen S H. Traffic congestion and social media in China. IEEE Intelligent Systems, 2013, 28(1):72-77 https://www.researchgate.net/publication/260304843_Traffic_Congestion_and_Social_Media_in_China [81] Zheng X H, Chen W, Wang P, Shen D Y, Chen S H, Wang X, et al. Big data for social transportation. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(3):620-630 doi: 10.1109/TITS.2015.2480157 [82] Onnela J P, Saramäki J, Hyvönen J, Szabó G, Lazer D, Kaski K, et al. Structure and tie strengths in mobile communication networks. Proceedings of the National Academy of Sciences of the United States of America, 2007, 104(18):7332-7336 doi: 10.1073/pnas.0610245104 [83] Zhang Y X, Li Z Q, Gao C L, Bian K G, Song L Y, Dong S L, et al. Mobile social big data:WeChat moments dataset, network applications, and opportunities. IEEE Network, 2018, 32(3):146-153 doi: 10.1109/MNET.2018.1700282 [84] Elsayed S A, Abdelhamid S, Hassanein H S. Proactive caching at parked vehicles for social networking. In:Proceedings of the 2018 IEEE International Conference on Communications. Kansas City, MO, USA:IEEE, 2018. 1-6 [85] Zhang Y X, Li Z Q, Gao C L, Bian K G, Song L Y, Dong S L, et al. WeChatNet, a mobile social big dataset of WeChat moments[Online], available:https://github.com/pkumobile/WMdata, April 4, 2010. [86] Wang Z T, Chen C Y, Li W J. Predictive network representation learning for link prediction. In:Proceedings of the 40th International ACM SIGIR Conference on Research and Development in Information Retrieval. Shinjuku, Tokyo, Japan:ACM, 2017. 969-972 [87] Shan S Q, Liu M N, Xu X B. Analysis of the key influencing factors of haze information dissemination behavior and motivation in WeChat. Information Discovery and Delivery, 2017, 45(1):21-29 doi: 10.1108/IDD-09-2016-0029 [88] 王飞跃, 张俊.智联网:概念、问题和平台.自动化学报, 2017, 43(12):2061-2070 http://www.aas.net.cn/CN/abstract/abstract19181.shtmlWang Fei-Yue, Zhang Jun. Internet of minds:the concept, issues and platforms. Acta Automatica Sinica, 2017, 43(12):2061-2070 http://www.aas.net.cn/CN/abstract/abstract19181.shtml [89] 王飞跃, 张军, 张俊, 王晓.工业智联网:基本概念、关键技术与核心应用.自动化学报, 2018, 44(9):1606-1617 http://www.aas.net.cn/CN/abstract/abstract19342.shtmlWang Fei-Yue, Zhang Jun, Zhang Jun, Wang Xiao. Industrial internet of minds:concept, technology and application. Acta Automatica Sinica, 2018, 44(9):1606-1617 http://www.aas.net.cn/CN/abstract/abstract19342.shtml -

 下载:
下载:


计量
- 文章访问数: 2323
- HTML全文浏览量: 1164
- PDF下载量: 326
- 被引次数: 0
