

-
摘要: 定位是机器人导航的关键问题,在缺乏结构信息的室外非结构化环境下,精确的三维定位面临更大挑战.本文提出一种基于相机与摇摆激光雷达融合的定位算法,重点解决在光照,地面起伏等因素影响下的机器人定位问题.本文结合激光雷达的深度信息和图像的颜色纹理信息,构建在时序帧间的特征点匹配关系;引入一种置信度评价方法,结合系统误差、数据关联、物体遮挡、特征跟踪等因素对特征点及其匹配关系进行评估,减少低质量特征的影响;最终将定位问题转化为特征点对的加权重投影误差优化问题予以解决.本文利用小型轮式移动机器人在越野和公园等典型非结构化环境下进行数据采集和实验验证.实验结果表明,与前沿的视觉定位算法相比,本文算法可有效提高在非结构化环境中的定位精度.Abstract: As a key issue of unmanned ground robots, localization faces more challenges in an off-road environment, where scenes are lack of structure. This paper proposes a visual localization method developed by combining a nodding LiDAR with a monocular camera, where localization is converted to a problem of re-projection error minimization between LiDAR-camera feature correspondences. In order to establish plenty of scene features while reducing the effects from low-quality ones, two procedures, i.e. LiDAR-to-camera and camera-to-LiDAR projections, are developed to generate feature correspondences between the data of two sensing modalities. Confidence measure is developed to evaluate the reliability of the established correspondences by assessing the factors such as system error, data association, occlusion, feature detection and tracking, so as to improve the robustness in complex situations. An experiment is conducted in two typical off-road environments using a wheeled robot with a nodding LiDAR and a monocular camera. The results show that the proposed method achieves more accurate localization than the state-of-the-art mono or stereo visual localization approach.
-
Key words:
- Monocular camera /
- LiDAR /
- multi-sensor fusion /
- robot localization /
- off-road environment
-
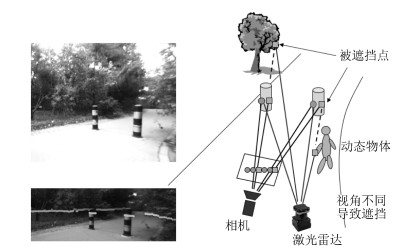
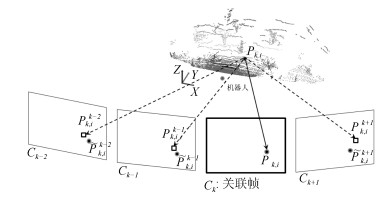
图 5 数据融合时, 传感器视点不同造成的物体遮挡示意
Fig. 5 Example of occlusion in camera-LiDAR fusion caused by different point of view
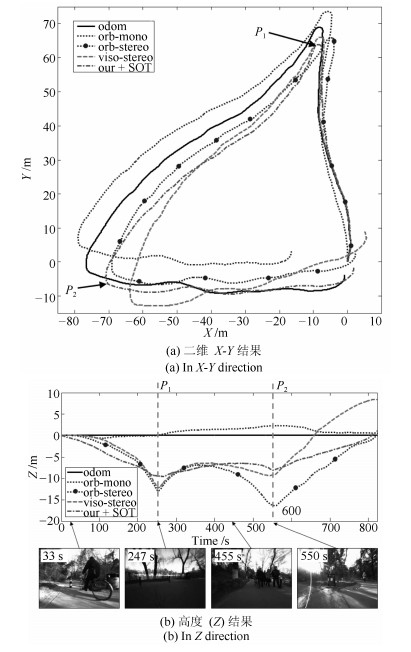
表 1 不同定位算法闭合误差(m)
Table 1 Results of different localization algorithms (m)
越野环境闭合误差 公园环境闭合误差 二维 三维 二维 三维 odom 0.2528 — 3.9004 — orb-mono 0.9937 0.9937 16.9097 16.9231 orb-stereo 0.5565 1.1419 3.8488 3.8708 viso-stereo 0.2501 0.3644 10.1943 13.1358 our+SOT 0.1031 0.1094 2.3492 2.5889  下载: 导出CSV
下载: 导出CSV
表 2 重投影误差与定位结果相关性
Table 2 Correlation of re-projection errors and localization error
特征点数 投影误差(pixel) 定位误差(m) orb-stereo 627.00 6.33 1.1419 viso-stereo 621.72 7.69 0.3644 our 612.09 4.32 0.5126 our + $S$ 568.07 4.23 0.4299 our + $S$ + $O$ 318.08 3.77 0.3047 our + $S$ + T 295.92 3.74 0.3100 our + $S$ + $O$ + $T$ 244.52 3.40 0.1094
下载: 导出CSV
-
[1] Nistér D, Naroditsky O, Bergen J R. Visual odometry for ground vehicle applications. Journal of Field Robotics, 2006, 23(1):3-20 doi: 10.1002-rob.20103/ [2] Mur-Artal R, Montiel J M M, Tardós J D. ORB-SLAM:a versatile and accurate monocular slam system. IEEE Transactions on Robotics, 2015, 31(5):1147-1163 doi: 10.1109/TRO.2015.2463671 [3] Kuramachi R, Ohsato A, Sasaki Y, Mizoguchi H. G-ICP SLAM: an odometry-free 3D mapping system with robust 6dof pose estimation. In: Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO). Zhuhai, China: IEEE, 2015. 176-181 [4] Weingarten J, Siegwart R. EKF-based 3D SLAM for structured environment reconstruction. In: Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Edmonton, AB, Canada: IEEE, 2005. 3834-3839 [5] Cole D M, Newman P M. Using laser range data for 3D SLAM in outdoor environments. In: Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA). Orlando, FL, United States: IEEE, 2006. 1556-1563 [6] Zhang J, Kaess M, Singh S. Real-time depth enhanced monocular odometry. In: Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL, United States: IEEE, 2014. 4973-4980 [7] Zhang J, Singh S. Visual-lidar odometry and mapping: low-drift, robust, and fast. In: Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, United States: IEEE, 2015. 2174-2181 [8] Grimes M, LeCun Y. Efficient off-road localization using visually corrected odometry. In: Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA). Kobe, Japan: IEEE, 2009. 2649-2654 [9] Harrison A, Newman P M. High quality 3D laser ranging under general vehicle motion. In: Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, United States: IEEE, 2008. 7-12 [10] Zhang J, Singh S. LOAM: lidar odometry and mapping in real-time. In: Proceedings of the 2014 Robotics: Science and Systems Conference. Berkeley, CA, USA, 2014 [11] González R, Rodríguez F, Guzmán J L. Autonomous Tracked Robots in Planar Off-Road Conditions: Modelling, Localization, and Motion Control. Cham: Springer, 2014. [12] Forster C, Carlone L, Dellaert F, Scaramuzza D. On-manifold preintegration for real-time visual——inertial odometry. IEEE Transactions on Robotics, 2017, 33(1):1-21 [13] Mur-Artal R, Tardós J D. Visual-inertial monocular SLAM with map reuse. IEEE Robotics and Automation Letters, 2017, 2(2):796-803 doi: 10.1109/LRA.2017.2653359 [14] Moré J J. The levenberg-marquardt algorithm: implementation and theory. In: Proceedings of the 1978 Biennial Conference Held at Dundee. Berlin, Heidelberg: Springer, 1978. 105-116 [15] Geiger A, Ziegler J, Stiller C. StereoScan: Dense 3d reconstruction in real-time. In: Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV). Baden-Baden, Germany: IEEE, 2011. 963-968 -

 下载:
下载:




图(10) / 表(2)
计量
- 文章访问数: 1935
- HTML全文浏览量: 461
- PDF下载量: 172
- 被引次数: 0
