

-
摘要: 随着我国冰雪运动的蓬勃发展和2022年北京冬季奥运会的成功申办,冰雪运动生物力学和冰雪机器人的研究越来越受关注.首先,介绍冰雪环境下摩擦力学的基本理论,进一步,对比不同变量对摩擦系数的影响;其次,讨论冰雪运动中空气阻力的成因,并分析潜在的减阻机制;再次,介绍研究中常用的测量手段和不同维度的建模方法,阐明各类手段和方法的优缺点;最后,回顾冰雪机器人的研究进展,分析冰雪机器人研究领域的技术挑战,展望冰雪机器人未来的研究思路.Abstract: With the flourishing development of China's ice and snow sports and the successful bidding of the Beijing's 2022 Olympic Winter Games, the research on ice and snow sport biomechanics as well as ice and snow robots plays an increasingly important role. First of all, we introduce the basic theories of friction mechanics in ice and snow environments. Further, the influence of different variables on the friction coefficient is compared. Secondly, we discuss contributing factors of aerodynamic drag in snow and ice, and analyze the potential drag reduction mechanism. Thirdly, the measurement methods typically involved in the research as well as the modeling methods with different dimensions are introduced, and the relative merits are clarified. Finally, we review the research progress of ice and snow robots, analyze the key technical challenges in the field, and offer the ideas of future development of related robots.1) 本文责任编委 孙富春
-
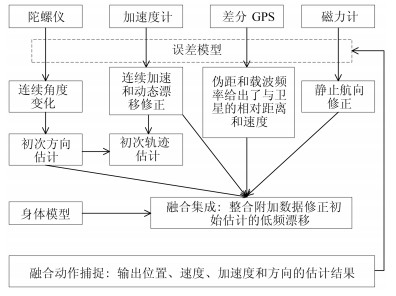
图 2 基于IMU和GNSS测量的数据融合积分算法框图
Fig. 2 Block diagram of sensor fusion integration algorithm for IMU and GNSS measurements
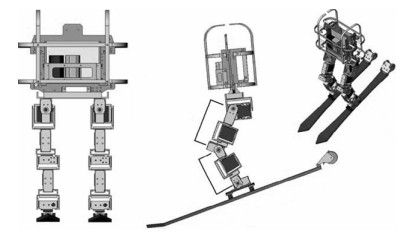
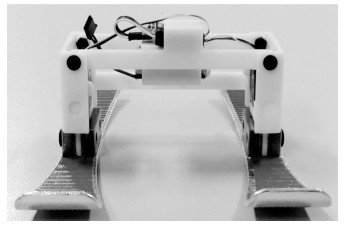
图 6 日本金泽大学研制的滑雪机器人三维结构图
Fig. 6 3D structure diagram of skiing robot developed by Kanazawa University in Japan
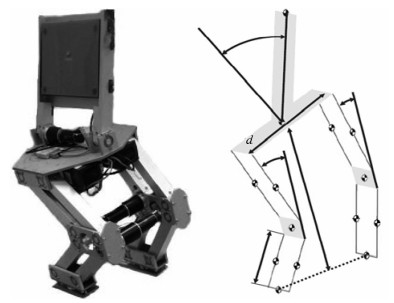
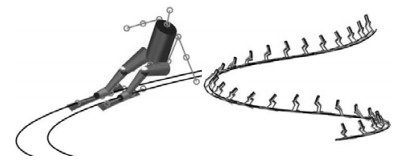
图 7 斯洛文尼亚约瑟夫斯蒂芬研究所研制的三关节滑雪机器人
Fig. 7 Three-joint skiing robot developed by Jožef Stephen Institute in Slovenia
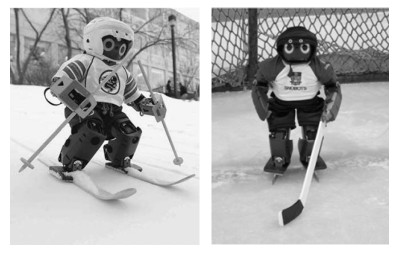
图 8 加拿大曼尼托巴大学研制的滑冰和滑雪机器人
Fig. 8 Skating and skiing robots developed by the University of Manitoba in Canada
表 1 不同变量对摩擦系数的影响
Table 1 Influence of different parameters on the friction coefficient
符号 变量含义 与摩擦系数的关系 潜在原因及说明 文献 $T$ 温度(Temperature) $-7$至$-2$ ℃下取得最小摩擦系数, 超出范围摩擦系数均呈增大趋势 温度过低时, 接触面为固–固摩擦, 呈现干摩擦性质; 温度接近熔点及以上时, 液态膜厚度明显增加, 接触面的毛细管桥引入附加阻力 [23-26] $v_s$ 滑动速度(Sliding velocity) 速度越快, 摩擦系数越小 高速相对于低速产生更多热量, 提升接触面的润滑效果 [22, 25-26] $A_c$ 表观接触面积(Apparent area of contact) 接触面积越大, 摩擦系数也越大 接触面较小时, 单位面积摩擦释放的热量越大, 有效提升润滑效果, 反之面积越大, 接触点越分散, 润滑效果越差 [16, 22] $R_a$ 表面粗糙度(Roughness) 表面越粗糙, 摩擦系数越大 增加表面的粗糙度导致在滑动运动期间增加实际接触面积和更多的互锁接触点, 最终增加磨损率和总摩擦 [28-29] $R_w$ 润湿性(Wettability) 亲水性材料易于润湿表面, 摩擦系数高, 接近熔点处尤甚 不具备支撑作用的冰雪颗粒易于通过毛细管桥与亲水材料相连, 毛细管力引入附加阻力 [27] $R_H$ 相对湿度(Relative humidity) 相对湿度在滑动初始阶段影响较大, 相对湿度越大摩擦系数越小 湿度越高, 接触面润滑效果越好, 摩擦力越小, 目前相对湿度的研究较少, 需要更多实验数据来支撑 [30] $\lambda$ 热导率(Thermal conductivity) 良好的热导体摩擦系数更高 导热率高意味着接触面获得的热量变少, 不利于液态膜厚度增加 [30]  下载: 导出CSV
下载: 导出CSV
表 2 应力转换器和压力鞋垫系统优缺点对比
Table 2 Comparison of force transducers and pressure insole systems
优点 缺点 应力转换器 能够测量三维力和力矩; 测量的力较为准确, 可被认定为标准值 较重(约0.5 kg$\, \sim\, $1.0 kg); 改变滑雪设备的特性(刚度和高度) 压力鞋垫系统 尺寸小, 适合野外使用; 对运动员干扰小 只能测量足部与鞋垫垂直方向的压力; 测量精度目前仍有待验证
下载: 导出CSV
表 3 几种典型的数学建模方法
Table 3 Several typical mathematical modeling methods
文献 维度 场景 研究目标 体段数 实验数据 建模方法 Kawai等(2004)[82] 3 滑雪 基于计算机图形学开发一个新的滑雪控制模型, 用于模拟滑雪者重心与地面的相对运动, 以及滑雪运动员对雪板的作用力 15 基于视频数据的二维运动数据 计算机辅助3D人体建模; 多体系统仿真 Holmberg等(2008)[85] 3 滑雪 越野滑雪双极推撑滑行技术的生物力学分析, 用于和相关文献中的数据进行对比 64刚体, 464肌肉 基于视频数据的二维运动数据; 手杖对地面作用力 右侧上半身和手杖的三维逆向动力学; 带约束的牛顿–欧拉方程; 未考虑地面与雪板的作用力 Chen等(2009)[79] 2 滑雪 考虑地面作用力和空气阻力的二维滑雪模型 4 人工设定的仿真数据 基于牛顿–欧拉方程的二维逆动力学模型; 雪–地作用力用基于库伦摩擦力的刚性离散点接触模型来描述 Oberegger等(2010)[88] 3 滑雪 三维多体滑雪者模型来模拟连续转弯 7 基于三台同步相机分析获得滑雪者和滑雪板上标记的3D坐标 带约束的牛顿–欧拉方程; 运动路径作为约束给出, 并不依赖于模型与环境的交互; 引入非完整平衡条件 Rudakov等(2010)[78] 1 滑雪 特殊障碍赛中滑雪轨迹的优化 2 经验数据和仿真数据 多项式拟合质心轨迹, 最小化方法优化参数 Fintelman等(2011)[81] 2 滑冰 提出简单的直线速度滑冰模型以模拟和优化速度滑冰的生物力学 3 商用局部位置测量(Local position measurement, LPM)系统; DAQ力采集系统; 高速相机系统用于同步上述两者 只考虑了二维运动, 包括空气阻力、冰鞋库伦摩擦力; 两种约束:垂直方向上的完整约束、横向上的非完整约束 Bruzzo等(2016)[89] 3 滑雪 越野滑雪三维多体动力学模型, 对单个推进阶段建模, 以获得运动中设计的动力学参数 3 16个相机的运动捕捉系统, 采样频率达1 000 Hz; 配备力传感器的雪板; 视觉速度指示器指导运动员动作 多体系统动力学建模 Kruk等(2017)[90] 2 滑冰 直道速度滑冰运动生物力学模拟 3 配备力传感器的冰鞋; 20个相机组成的动作捕捉系统 基于全局优化逆运动学估计每个身体段的重心
下载: 导出CSV
-
[1] 陈礼.滑雪运动生物力学仿真分析[博士学位论文], 大连理工大学, 中国, 2009Chen Li. The biomechanical simulation of skiing movement [Ph. D. dissertation], Dalian University of Technology, China, 2009 [2] Spörri J, Kröll J, Gilgien M, Müller E. How to prevent injuries in alpine ski racing: what do we know and where do we go from here? Sports Medicine, 2017, 47(4): 599-614 doi: 10.1007/s40279-016-0601-2 [3] Stuart C A. Snow sport head injury: characterization of clinical presentation and design of a relevant head impact apparatus [Ph. D. dissertation], University of British Columbia, UK, 2017 [4] Colonna M, Nicotra M, Moncalero M. Materials, designs and standards used in ski-boots for alpine skiing. Sports, 2013, 1(4): 78-113 doi: 10.3390/sports1040078 [5] Moncalero M, Signetti S, Mazzanti B, Bruzzi P, Pugno N M, Colonna M. Effect of material elastic properties and surface roughness on grip performances of ski boot soles under wet and icy conditions. International Journal of Industrial Ergonomics, 2017, 61: 62-70 doi: 10.1016/j.ergon.2017.04.004 [6] Jovic J, Escande A, Ayusawa K, Yoshida E, Kheddar A, Venture G. Humanoid and human inertia parameter identification using hierarchical optimization. IEEE Transactions on Robotics, 2016, 32(3): 726-735 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6e565757a072588c53ba93959103cd22 [7] 田彦涛, 孙中波, 李宏扬, 王静.动态双足机器人的控制与优化研究进展.自动化学报, 2016, 42(8): 1142-1157 http://www.aas.net.cn/CN/abstract/abstract18904.shtmlTian Yan-Tao, Sun Zhong-Bo, Li Hong-Yang, Wang Jing. A review of optimal and control strategies for dynamic walking bipedal robots. Acta Automatica Sinica, 2016, 42(8): 1142-1157 http://www.aas.net.cn/CN/abstract/abstract18904.shtml [8] Boston Dynamics. Atlas: The World's Most Dynamic Humanoid [Online], available: https://www.bostondynamics.com/atlas, October 30, 2018. [9] Kennedy F E, Schulson E M, Jones D E. The friction of ice on ice at low sliding velocities. Philosophical Magazine A, 2000, 80(5): 1093-1110 doi: 10.1080/01418630008221976 [10] Rist M A. High-stress ice fracture and friction. Journal of Physical Chemistry B, 1997, 101(32): 6263-6266 doi: 10.1021/jp963175x [11] Schulson E M, Fortt A L. Friction of ice on ice. Journal of Geophysical Research: Solid Earth, 2012, 117(12): B12204 http://d.old.wanfangdata.com.cn/Periodical/whjtkjdxxb201804009 [12] Petrenko V F, Whitworth R W. Physics of Ice. London: Oxford University Press, 1999. 95-98 [13] Braghin F, Belloni E, Melzi S, Sabbioni E, Cheli F. Friction between runner and ice. The Engineering Approach to Winter Sports. New York: Springer, 2016. 33-51 [14] Makkonen L, Tikanmäki M. Modeling the friction of ice. Cold Regions Science and Technology, 2014, 102: 84-93 doi: 10.1016/j.coldregions.2014.03.002 [15] Kietzig A M. Microscopic ice friction [Ph. D. dissertation], University of British Columbia, UK, 2010 [16] Bäurle L. Sliding friction of polyethylene on snow and ice [Ph. D. dissertation], ETH Zurich, Swiss, 2006 [17] Fowler A J, Bejan A. Contact melting during sliding on ice. International Journal of Heat and Mass Transfer, 1993, 36(5): 1171-1179 doi: 10.1016/S0017-9310(05)80087-0 [18] Lozowski E, Szilder K, Maw S. A model of ice friction for a speed skate blade. Sports Engineering, 2013, 16(4): 239-253 doi: 10.1007/s12283-013-0141-z [19] Maeno N. Ice and snow for winter sports. The Engineering Approach to Winter Sports. New York: Springer, 2016. 1-15 [20] Nachbauer W, Kaps P, Hasler M, Mössner M. Friction between ski and snow. The Engineering Approach to Winter Sports. New York: Springer, 2016. 17-32 [21] Lozowski E P, Szilder K. Derivation and new analysis of a hydrodynamic model of speed skate ice friction. International Journal of Offshore and Polar Engineering, 2013, 23(2): 104-111 [22] Bäurle L, Kaempfer T U, Szabó D, Spencer N D. Sliding friction of polyethylene on snow and ice: contact area and modeling. Cold Regions Science and Technology, 2007, 47(3): 276-289 doi: 10.1016/j.coldregions.2006.10.005 [23] Ikeda-Fukazawa T, Kawamura K. Molecular-dynamics studies of surface of ice Ih. Journal of Chemical Physics, 2004, 120(3): 1395-1401 https://www.ncbi.nlm.nih.gov/pubmed/15268265 [24] Slotfeldt-Ellingsen D, Torgersen L. Water on ice: influence on friction. Journal of Physics D: Applied Physics, 1983, 16(9): 1715-1719 doi: 10.1088/0022-3727/16/9/017 [25] Akkok M, Ettles C M M, Calabrese S J. Parameters affecting the kinetic friction of ice. Journal of Tribology, 1987, 109(3): 552-559 doi: 10.1115/1.3261503 [26] De Koning J J, Houdijk H, De Groot G, Bobbert M F. From biomechanical theory to application in top sports: the Klapskate story. Journal of Biomechanics, 2000, 33(10): 1225-1229 doi: 10.1016/S0021-9290(00)00063-4 [27] Colbeck S C. Capillary bonding of wet surfaces-the effects of contact angle and surface roughness. Journal of Adhesion Science and Technology, 1997, 11(3): 359-371 doi: 10.1163/156856197X00750 [28] Marmo B A, Farrow I S, Buckingham M P, Blackford J R. Frictional heat generated by sweeping in curling and its effect on ice friction. Proceedings of the Institution of Mechanical Engineers, Part L: Journal of Materials: Design and Applications, 2006, 220(4): 189-197 doi: 10.1243/14644207JMDA93 [29] Ducret S, Zahouani H, Midol A, Lanteri P, Mathia T G. Friction and abrasive wear of UHWMPE sliding on ice. Wear, 2005, 258(1-4): 26-31 doi: 10.1016/j.wear.2004.09.026 [30] Calabrese S J, Buxton R, Marsh G. Frictional characteristics of materials sliding against ice. Lubrication Engineering, 1980, 36(5): 283-289 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Doaj000004105070 [31] Brownlie L, Larose G, D'Auteuil A, Allingerc T, Meinertd F, Kristofice P, et al. Factors affecting the aerodynamic drag of alpine skiers. Procedia Engineering, 2010, 2(2): 2375-2380 doi: 10.1016/j.proeng.2010.04.002 [32] Watanabe K, Ohtsuki T. Postural changes and aerodynamic forces in alpine skiing. Ergonomics, 1977, 20(2): 121-131 doi: 10.1080/00140137708931611 [33] Fuss F K. Slipstreaming in gravity powered sports: application to Racing strategy in ski cross. Frontiers in Physiology, 2018, 9: 1032 doi: 10.3389/fphys.2018.01032 [34] Lee K D, Park M J, Kim K Y. Optimization of ski jumper's posture considering lift-to-drag ratio and stability. Journal of Biomechanics, 2012, 45(12): 2125-2132 doi: 10.1016/j.jbiomech.2012.05.036 [35] Kyle C R, Caiozzo V J. The effect of athletic clothing aerodynamics upon running speed. Medicine and Science in Sports and Exercise, 1986, 18(5): 509-515 http://med.wanfangdata.com.cn/Paper/Detail/PeriodicalPaper_PM3773666 [36] Brownlie L W. Aerodynamic characteristics of sports apparel [Ph. D. dissertation], Simon Fraser University, Canada, 1992 [37] Oggiano L, Saetran L R. Experimental analysis on parameters affecting drag force on speed skaters. Sports Technology, 2010, 3(4): 223-234 doi: 10.1080/19346182.2012.663532 [38] Oggiano L, Saetran L, Loset S, Winther R. Reducing the athlete's aerodynamical resistance. Journal of Computational and Applied Mechanics, 2004, 5(1): 1-10 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Open J-Gate000001960589 [39] Müller E, Lindinger S, Stöggl T. Science and Skiing IV. London: Meyer & Meyer Sport, 2009. [40] Murakami M, Iwase M, Seo K, Ohgi Y, Koyanagi R. Ski jumping flight skill analysis based on high-speed video image. Procedia Engineering, 2010, 2(2): 2381-2386 doi: 10.1016/j.proeng.2010.04.003 [41] Chowdhury H, Alam F, Mainwaring D, Subic A, Tate M, Forster D, et al. Design and methodology for evaluating aerodynamic characteristics of sports textiles. Sports Technology, 2009, 2(3-4): 81-86 doi: 10.1080/19346182.2009.9648505 [42] Brownlie L W, Kyle C R. Evidence that skin suits affect long track speed skating performance. Procedia Engineering, 2012, 34: 26-31 doi: 10.1016/j.proeng.2012.04.006 [43] Moria H, Alam F, Chowdhury H, Subic A. The compression effect on aerodynamic properties of sports fabrics. Procedia Engineering, 2012, 34: 56-61 doi: 10.1016/j.proeng.2012.04.011 [44] Bardal L M, Reid R. The effect of textile air permeability on the drag of high-speed winter sports apparel. Sports Engineering, 2014, 17(2): 83-88 doi: 10.1007/s12283-013-0134-y [45] Reid R C. A Kinematic and kinetic study of alpine skiing technique in Slalom [Ph. D. dissertation], Norwegian School of Sport Sciences, Oslo, 2010 [46] Supej M, Kipp R, Holmberg H C. Mechanical parameters as predictors of performance in alpine World Cup slalom racing. Scandinavian Journal of Medicine & Science in Sports, 2011, 21(6): e72-e81 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1111/j.1600-0838.2010.01159.x [47] Rhodin H, Meyer F, Spörri J, Müller E, Constantin V, Fua P, et al. Learning monocular 3D human pose estimation from multi-view images. In: Proceedings of IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 8437-8446 [48] Huber A, Spitzenpfeil P, Waibel K, Debus D, Fozzy M E. CRIPS-crash recognition and injury prevention in alpine ski racing. In: Proceedings of the 5th International Congress on Science and Skiing. Arlberg, Austria: Meyer & Meyer Sports, 2010. [49] Gilgien M, Singer J, Rhyner H. Comparison of two methods to assess the choice of skier trajectories through banked turns in ski cross. In: Proceedings of the 5th International Congress on Science and Skiing. Arlberg, Austria: Meyer & Meyer Sports, 2010. [50] Gilgien M, Spörri J, Chardonnens J, Kröll J, Limpach P, Müller E. Determination of the centre of mass kinematics in alpine skiing using differential global navigation satellite systems. Journal of Sports Sciences, 2015, 33(9): 960-969 doi: 10.1080/02640414.2014.977934 [51] Supej M, Saetran L, Oggiano L, Ettema G, Šarabon N, Nemec B, et al. Aerodynamic drag is not the major determinant of performance during giant slalom skiing at the elite level. Scandinavian Journal of Medicine & Science in Sports, 2013, 23(1): e38-e47 https://www.ncbi.nlm.nih.gov/pubmed/23121340/ [52] Roetenberg D, Luinge H J, Baten C T M, Veltink P H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3): 395-405 doi: 10.1109/TNSRE.2005.847353 [53] Yoshioka S, Fujita Z, Hay D C, Ishige Y. Pose tracking with rate gyroscopes in alpine skiing. Sports Engineering, 2018, 21(3): 177-188 doi: 10.1007/s12283-017-0261-y [54] Fasel B, Spörri J, Kröll J, Müller E, Aminian K. Using inertial sensors for reconstructing 3D full-body movement in sports-possibilities and limitations on the example of alpine ski racing. In: Proceedings of the 33rd International Conference on Biomechanics in Sports. Poitiers, France, 2015. [55] Roetenberg D, Luinge H, Slycke P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors, Technical Report 1, Xsens Motion Technologies, Netherlands, 2013. [56] Krüger A, Edelmann-Nusser J. Application of a full body inertial measurement system in alpine skiing: a comparison with an optical video based system. Journal of Applied Biomechanics, 2010, 26(4): 516-521 doi: 10.1123/jab.26.4.516 [57] Supej M. 3D measurements of alpine skiing with an inertial sensor motion capture suit and GNSS RTK system. Journal of Sports Sciences, 2010, 28(7): 759-769 doi: 10.1080/02640411003716934 [58] Fasel B, Spörri J, Chardonnens J, Kröll J, Müller E, Aminian K. Joint inertial sensor orientation drift reduction for highly dynamic movements. IEEE Journal of Biomedical and Health Informatics, 2018, 22(1): 77-86 doi: 10.1109/JBHI.2017.2659758 [59] Fasel B, Spörri J, Gilgien M, Boffi G, Chardonnens J, Müller E, et al. Three-dimensional body and centre of mass kinematics in alpine ski racing using differential GNSS and inertial sensors. Remote Sensing, 2016, 8(8): 671 doi: 10.3390/rs8080671 [60] Brodie M, Walmsley A, Page W. Fusion motion capture: a prototype system using inertial measurement units and GPS for the biomechanical analysis of ski racing. Sports Technology, 2008, 1(1): 17-28 doi: 10.1080/19346182.2008.9648447 [61] Müller E, Schwameder H. Biomechanical aspects of new techniques in alpine skiing and ski-jumping. Journal of Sports Sciences, 2003, 21(9): 679-692 doi: 10.1080/0264041031000140284 [62] 孙广彬, 王宏, 陆志国, 王福旺, 史添玮, 王琳.仿人足底肌电特征的机器人行走规划.自动化学报, 41(5): 874-884 http://www.aas.net.cn/CN/abstract/abstract18662.shtmlSun Guang-Bin, Wang Hong, Lu Zhi-Guo, Wang Fu-Wang, Shi Tian-Wei, Wang Lin. Humanoid walking planning based on EMG from human foot-bottom. Acta Automatica Sinica, 2015, 41(5): 874-884 http://www.aas.net.cn/CN/abstract/abstract18662.shtml [63] Meyer F, Le Pelley D, Borrani F. Aerodynamic drag modeling of alpine skiers performing giant slalom turns. Medicine and Science in Sports and Exercise, 2012, 44(6): 1109-1115 doi: 10.1249/MSS.0b013e3182443315 [64] D'Auteuil A, Larose G L, Zan S J. Wind turbulence in speed skating: measurement, simulation and its effect on aerodynamic drag. Journal of Wind Engineering and Industrial Aerodynamics, 2012, 104-106: 585-593 doi: 10.1016/j.jweia.2012.02.002 [65] D'Auteuil A, Larose G, Zan S, Matida E. Detection of the boundary layer transition for non-circular cross-sections using surface pressure measurements. In: Proceedings of the 13th International Conference on Wind Engineering. Amsterdam, Netherlands, 2011. [66] Groh B H, Fritz J, Deininger M, Schwameder H, Eskofier B M. Unobtrusive and wearable landing momentum estimation in ski jumping with inertial-magnetic sensors. In: Proceedings of the 15th International Conference on Wearable and Implantable Body Sensor Networks (BSN). Las Vegas, USA: IEEE, 2018. 102-105 [67] Radenović O, Nemec B, Medved V. A new biomechanical measurement and testing method for turns in alpine skiing. In: Proceedings of the International Federation for Medical and Biological Engineering. Zagreb, 2001. 624-627 [68] Kiefmann A, Krinninger M, Lindemann U, Senner V, Spitzenpfeil P. A new six component dynamometer for measuring ground reaction forces in alpine skiing. The Engineering of Sport 6. New York: Springer, 2006. 87-92 [69] Nakazato K, Scheiber P, Müller E. A comparison of ground reaction forces determined by portable force-plate and pressure-insole systems in alpine skiing. Journal of Sports Science and Medicine, 2011, 10(4): 754-762 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_c0499b07534132e2ed7e095dc8189039 [70] Stöggl T, Martiner A. Validation of Moticon's OpenGo sensor insoles during gait, jumps, balance and cross-country skiing specific imitation movements. Journal of Sports Sciences, 2017, 35(2): 196-206 doi: 10.1080/02640414.2016.1161205 [71] Zhang Y L, Hubbard M, Huffman R K. Optimum control of bobsled steering. Journal of Optimization Theory and Applications, 1995, 85(1): 1-19 doi: 10.1007/BF02192297 [72] Roche J, Turnock S R, Wright A M. An analysis of the interaction between slider physique and descent time for the bob skeleton. The Engineering of Sport 7. Paris: Springer, 2008. 101-110 [73] Morawski J M. Control systems approach to a ski-turn analysis. Journal of Biomechanics, 1973, 6(3): 267-276 doi: 10.1016/0021-9290(73)90049-3 [74] Kawai S, Otani H, Sakata T. Coupled motion of ski and elastic foundation under ski control. JSME International Journal Series C: Mechanical Systems, Machine Elements and Manufacturing, 2003, 46(2): 614-621 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Open J-Gate000000606371 [75] Lieu D K, Mote C D. Mechanics of the turning snow ski. In: Skiing Trauma and Safety: 5th International Symposium. West Conshohocken, PA: ASTM International, 1985. 117-140 [76] Hirano Y, Tada N. Mechanics of a turning snow ski. International Journal of Mechanical Sciences, 1994, 36(5): 421-429 doi: 10.1016/0020-7403(94)90045-0 [77] Bruck F, Lugner P, Schretter H. A dynamic model for the performance of carving skis. In: Skiing Trauma and Safety: Fourteenth Volume. West Conshohocken, PA: ASTM International, 2003. 10-23 [78] Rudakov R, Lisovski A, Ilyalov O, Podgaets R. Optimisation of the skiers trajectory in special slalom. Procedia Engineering, 2010, 2(2): 3179-3182 doi: 10.1016/j.proeng.2010.04.129 [79] Chen L, Qi Z H. A 2-dimensional multi rigid bodies skiing model. Multibody System Dynamics, 2009, 21(1): 91-98 doi: 10.1007/s11044-008-9129-z [80] Heinrich D, van den Bogert A J, Nachbauer W. Relationship between jump landing kinematics and peak ACL force during a jump in downhill skiing: a simulation study. Scandinavian Journal of Medicine & Science in Sports, 2014, 24(3): e180-e187 http://med.wanfangdata.com.cn/Paper/Detail/PeriodicalPaper_PM24118532 [81] Fintelman D M, Den Braver O, Schwab A L. A simple 2-dimensional model of speed skating which mimics observed forces and motions. In: Multibody Dynamics 2011, Eccomas Thematic Conference. Brussels, Belgium, 2011. [82] Kawai S, Yamaguchi K, Sakata T. Ski control model for parallel turn using multibody system. JSME International Journal, Series C: Mechanical Systems, Machine Elements and Manufacturing, 2004, 47(4): 1095-1100 [83] Holmberg J, Wagenius P. A biomechanical model of a double-poling skier. In: Proceedings of International Society of Biomechanics 19th Congress on The human body in motion. Dunedin, New Zealand, 2003. [84] Holmberg L, Lund A M. Using double-poling simulations to study the load distribution between teres major and latissimus dorsi. Science and Nordic Skiing. Oxford, UK: Meyer and Meyer Sport, 2007. 81-89 [85] Holmberg L J, Lund A M. A musculoskeletal full-body simulation of cross-country skiing. Proceedings of the Institution of Mechanical Engineers, Part P: Journal of Sports Engineering and Technology, 2008, 222(1): 11-22 doi: 10.1243/17543371JSET10 [86] Chen J W, Xu K, Ma H X, Ding X L. Motion characteristics of human roller skating. Biology Open, 2019, 8(4): bio037713 doi: 10.1242/bio.037713 [87] Otten E. Inverse and forward dynamics: models of multi-body systems. Philosophical Transactions of the Royal Society of London. Series B: Biological Sciences, 2003, 358(1437): 1493-1500 doi: 10.1098/rstb.2003.1354 [88] Oberegger U F, Kaps P, Mössner M, Heinrich D, Nachbauer W. Simulation of turns with a 3D skier model. Procedia Engineering, 2010, 2(2): 3171-3177 doi: 10.1016/j.proeng.2010.04.128 [89] Bruzzo J, Schwab A L, Valkeapää A, Mikkola A, Ohtonen O, Linnamo V. A simple mechanical model for simulating cross-country skiing, skating technique. Sports Engineering, 2016, 19(2): 91-104 doi: 10.1007/s12283-015-0191-5 [90] van der Kruk E, Veeger H E J, van der Helm F C T, Schwab A L. Design and verification of a simple 3D dynamic model of speed skating which mimics observed forces and motions. Journal of Biomechanics, 2017, 64: 93-102 doi: 10.1016/j.jbiomech.2017.09.004 [91] Shimizu S. Science of Ski. Tokyo: Kobunsha Press, 1987. (in Japanese) [92] Hasegawa K. Introduction to ski sciences: mechanics of skiing. Japan Society of Ski Sciences, 2004, 14(1): 35-56 (in Japanese [93] Hasegawa K. Pflug Bogen and carving turn: comparison of dynamics underlying turn techniques using skidding and carving. Japan Society of Ski Sciences, 2006, 16(1): 51-60 (in Japanese [94] Kodera T, Hasegawa K. Dynamics of parallel turn. The Japan Society of Mechanical Engineers, 1998, 64(623): 65-71 (in Japanese http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_dec6fe10ee77007d1d08bc6a0d00f371 [95] Yoneyama T, Kagawa H, Okamoto A, Sawada M. Joint motion and reacting forces in the carving ski turn compared with the conventional ski turn. Sports Engineering, 2001, 3(3): 161-176 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1046/j.1460-2687.2000.00060.x [96] Yoneyama T, Kagawa H, Scott N W. Ski robot system for the study of effective turn motions. The Engineering of Sport, 2004, 5: 478-483 [97] Yoneyama T, Kagawa H, Unemoto M, Iizuka T, Scott N W. A ski robot system for qualitative modelling of the carved turn. Sports Engineering, 2009, 11(3): 131-141 doi: 10.1007/s12283-009-0018-3 [98] Lahajnar L, Kos A, Nemec B. Skiing robot - design, control, and navigation in unstructured environment. Robotica, 2009, 27(4): 567-577 doi: 10.1017/S0263574708004955 [99] Nemec B, Lahajnar L. Control and navigation of the skiing robot. In: Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. St. Louis, USA: IEEE, 2009. 2321-2326 [100] Petrič T, Nemec B, Babič J, Žlajpah L. Multilayer control of skiing robot. In: Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, USA: IEEE, 2011. 4832-4837 [101] Petrič T, Peternel L, Gams A, Nemec B, Žlajpah L. Navigation methods for the skiing robot. International Journal of Humanoid Robotics, 2013, 10(4): 1350029 doi: 10.1142/S0219843613500291 [102] Petrič T, Gams A, Balič J, Žlajpah. Reflexive stability control framework for humanoid robots. Autonomous Robots, 2013, 34(4): 347-361 doi: 10.1007/s10514-013-9329-0 [103] Iverach-Brereton C, Winton A, Baltes J. Ice skating humanoid robot. In: Proceedings of Conference towards Autonomous Robotic Systems. Berlin: Springer, 2012. 209-219 [104] Iverach-Brereton C, Baltes J, Anderson J, Winton A, Carrier D. Gait design for an ice skating humanoid robot. Robotics and Autonomous Systems, 2014, 62(3): 306-318 doi: 10.1016/j.robot.2013.09.016 [105] Iverach-Brereton C, Postnikof B, Baltes J, Hosseinmemar A. Active balancing and turning for alpine skiing robots. Knowledge Engineering Review, 2017, 32: e6 doi: 10.1017/S0269888916000163 [106] Saga T, Saga N. Alpine skiing robot using a passive turn with variable mechanism. Applied Sciences, 2018, 8(12): 2643-2656 doi: 10.3390/app8122643 [107] 吴俊君, 管贻生, 张宏, 周雪峰, 苏满佳.仿人机器人视觉导航中的实时性运动模糊探测器设计.自动化学报, 2014, 40(2): 267-276 http://www.aas.net.cn/CN/abstract/abstract18289.shtmlWu Jun-Jun, Guan Yi-Sheng, Zhang Hong, Zhou Xue-Feng, Su Man-Jia. A real-time method for motion blur detection in visual navigation with a humanoid robot. Acta Automatica Sinica, 2014, 40(2): 267-276 http://www.aas.net.cn/CN/abstract/abstract18289.shtml [108] 张继文, 刘莉, 陈恳.面向全方位双足步行跟随的路径规划.自动化学报, 2016, 42(2): 189-201 http://www.aas.net.cn/CN/abstract/abstract18809.shtmlZhang Ji-Wen, Liu Li, Chen Ken. Omni-directional bipedal walking path planning. Acta Automatica Sinica, 2016, 42(2): 189-201 http://www.aas.net.cn/CN/abstract/abstract18809.shtml [109] Zhang Z J, Fu T Z, Yan Z Y, Jin L, Xiao L, Sun Y P, et al. A varying-parameter convergent-differential neural network for solving joint-angular-drift problems of redundant robot manipulators. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 679-689 doi: 10.1109/TMECH.2018.2799724 [110] Zhang Z J, Yan Z Y. Hybrid-level joint-drift-free scheme of redundant robot manipulators synthesized by a varying-parameter recurrent neural network. IEEE Access, 2018, 6: 34967-34975 doi: 10.1109/ACCESS.2018.2850758 -

 下载:
下载:


计量
- 文章访问数: 2273
- HTML全文浏览量: 1211
- PDF下载量: 175
- 被引次数: 0
