2017年 第43卷 第7期
2017, 43(7): 1089-1100.
doi: 10.16383/j.aas.2017.c160032
摘要:
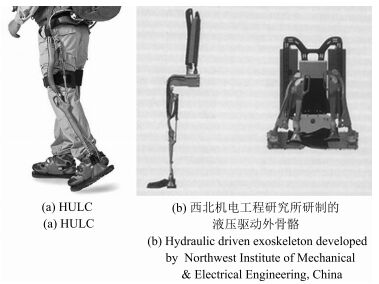
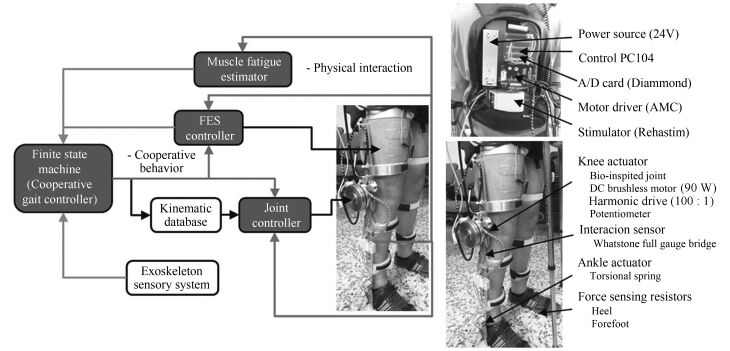
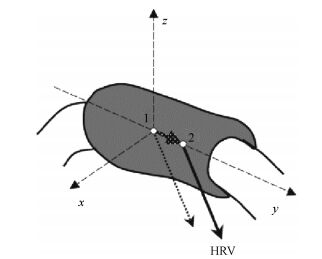
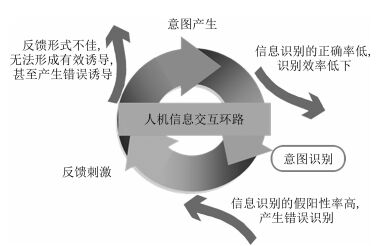
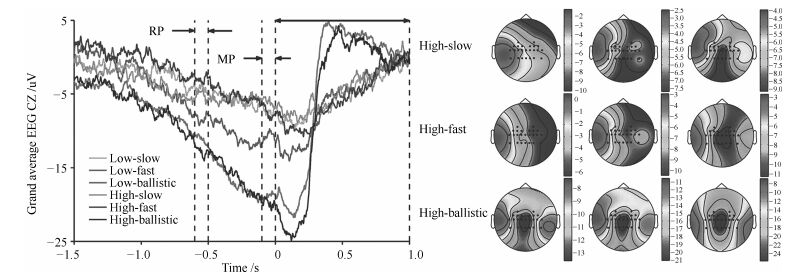
外骨骼机器人是集人体信息检测、机器人自动控制、神经工程等多学科知识于一身的高科技成果.本文简要介绍了外骨骼机器人研发技术现状和应用市场前景,分别从外骨骼动力驱动和运动测量技术角度剖析了支撑典型外骨骼机器人实现其运动辅助功能的主要技术基础,重点从神经信息交互角度出发,讨论了构建人机信息交互环路中的技术瓶颈,以及如何更为高效准确地获取人体运动意图.最后展望了其未来技术研发方向.
外骨骼机器人是集人体信息检测、机器人自动控制、神经工程等多学科知识于一身的高科技成果.本文简要介绍了外骨骼机器人研发技术现状和应用市场前景,分别从外骨骼动力驱动和运动测量技术角度剖析了支撑典型外骨骼机器人实现其运动辅助功能的主要技术基础,重点从神经信息交互角度出发,讨论了构建人机信息交互环路中的技术瓶颈,以及如何更为高效准确地获取人体运动意图.最后展望了其未来技术研发方向.





2017, 43(7): 1101-1113.
doi: 10.16383/j.aas.2017.c160735
摘要:
自适应动态规划(Adaptive dynamic programming,ADP)作为最优控制领域的近似优化方法,是求解复杂非线性系统最优控制问题的有力工具.近年来,已成为控制理论与计算智能领域的研究热点.本文着重介绍ADP算法的理论研究进展及其在航空航天领域的应用.分析了几种典型的制导律优化设计方法,以及ADP方法在导弹制导律设计中的应用现状和前景.
自适应动态规划(Adaptive dynamic programming,ADP)作为最优控制领域的近似优化方法,是求解复杂非线性系统最优控制问题的有力工具.近年来,已成为控制理论与计算智能领域的研究热点.本文着重介绍ADP算法的理论研究进展及其在航空航天领域的应用.分析了几种典型的制导律优化设计方法,以及ADP方法在导弹制导律设计中的应用现状和前景.
2017, 43(7): 1114-1141.
doi: 10.16383/j.aas.2017.c160638
摘要:
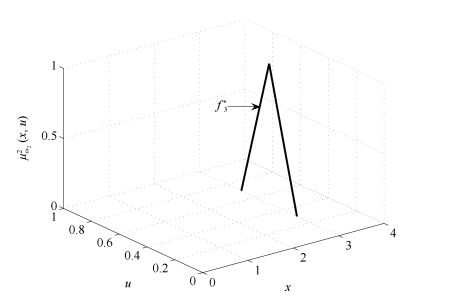
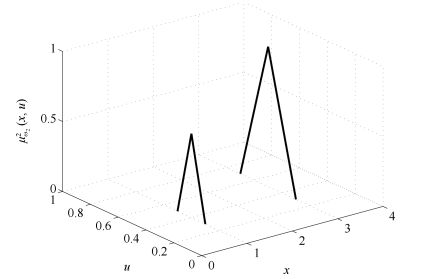
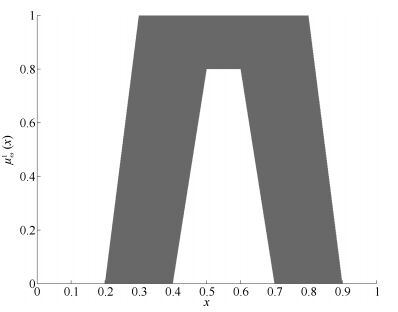
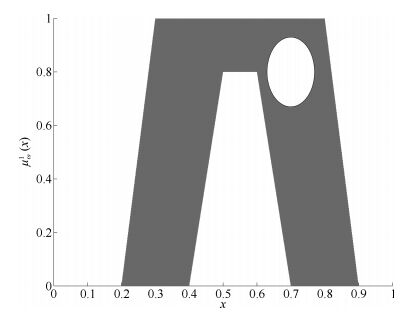
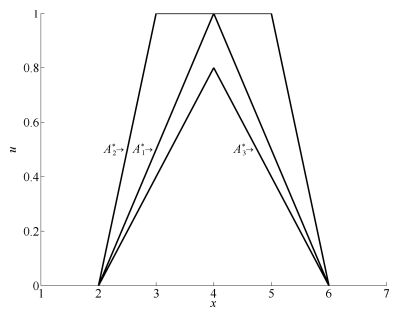
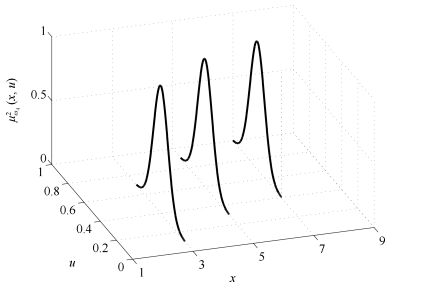
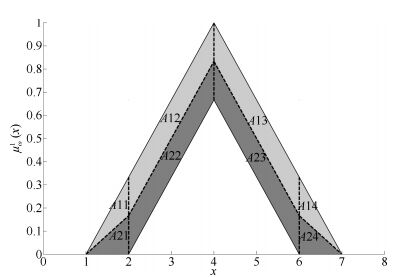
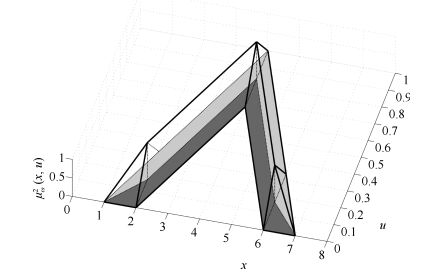
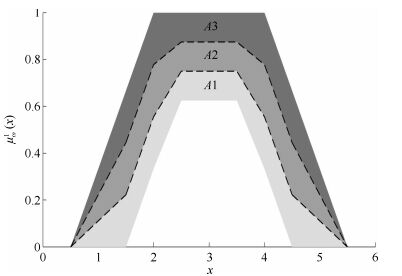
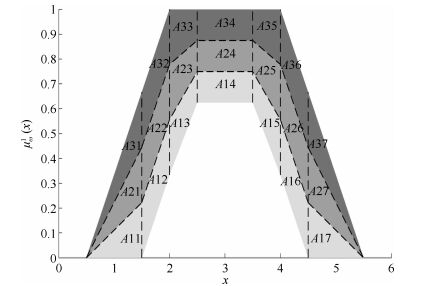
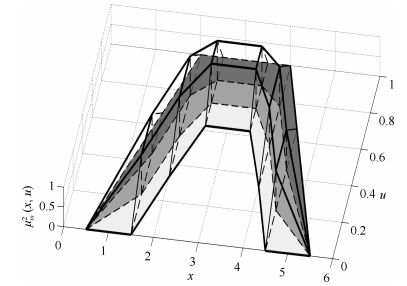
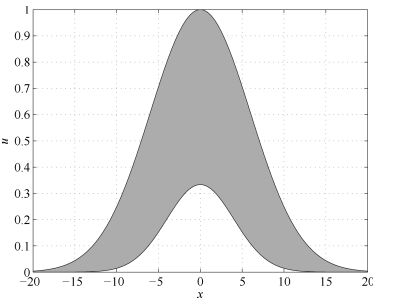
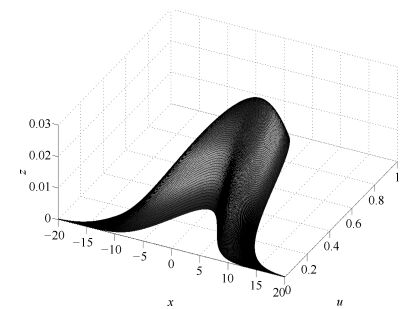
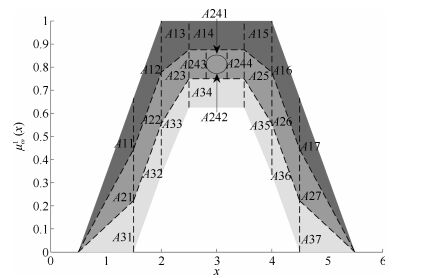
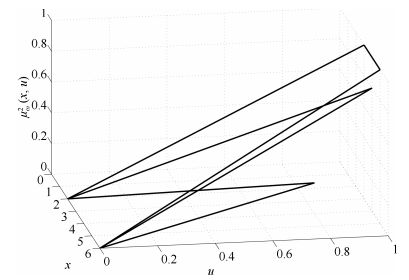
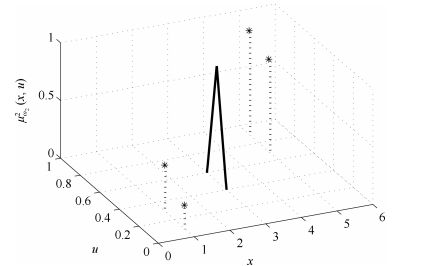
采用集合论的方法给出了单位模糊集合和二型模糊集合及其在一点的限制等定义,使得二型模糊集合更易于理解.通过定义嵌入单位模糊集合来描述一般二型模糊集合,并给出离散、半连通二型模糊集合的表达式.根据论域、主隶属度及隶属函数的特性将二型模糊集合分为四种类型:离散、半连通、连通及复合型,并根据连通的特点将连通二型模糊集合分为单连通及多连通两类.利用支集的闭包(Closure of support,CoS)划分法表述主隶属度及区间二型模糊集合.提出了CoS二、三次划分法分别来表述单、复连通二型模糊集合,并使每一个子区域的上下边界及次隶属函数在该子区域上的限制分别具有相同的解析表述式.最后,探讨了二型模糊集合在一点的限制、主隶属度、支集、嵌入单位模糊集合之间的关系.
采用集合论的方法给出了单位模糊集合和二型模糊集合及其在一点的限制等定义,使得二型模糊集合更易于理解.通过定义嵌入单位模糊集合来描述一般二型模糊集合,并给出离散、半连通二型模糊集合的表达式.根据论域、主隶属度及隶属函数的特性将二型模糊集合分为四种类型:离散、半连通、连通及复合型,并根据连通的特点将连通二型模糊集合分为单连通及多连通两类.利用支集的闭包(Closure of support,CoS)划分法表述主隶属度及区间二型模糊集合.提出了CoS二、三次划分法分别来表述单、复连通二型模糊集合,并使每一个子区域的上下边界及次隶属函数在该子区域上的限制分别具有相同的解析表述式.最后,探讨了二型模糊集合在一点的限制、主隶属度、支集、嵌入单位模糊集合之间的关系.




2017, 43(7): 1142-1159.
doi: 10.16383/j.aas.2017.c160325
摘要:
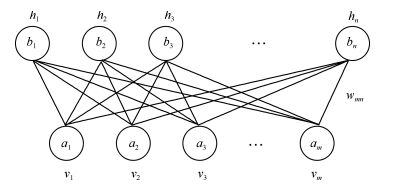
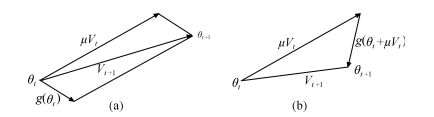
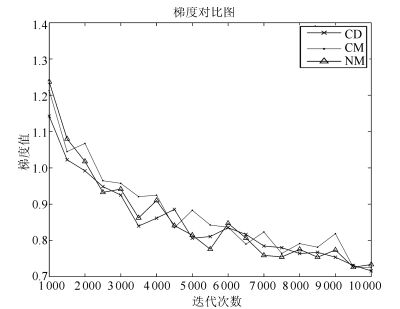
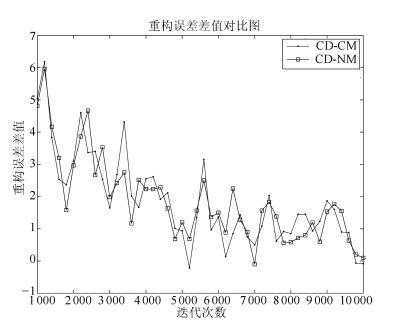
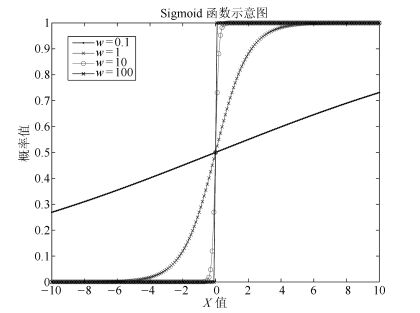
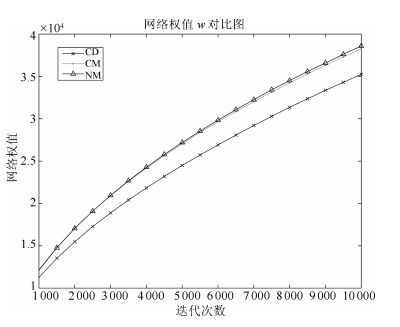
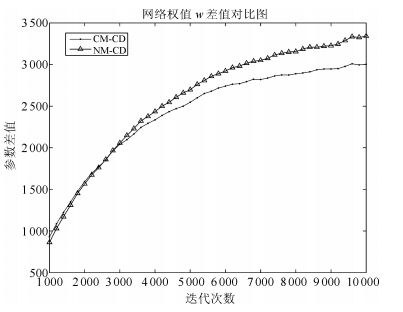
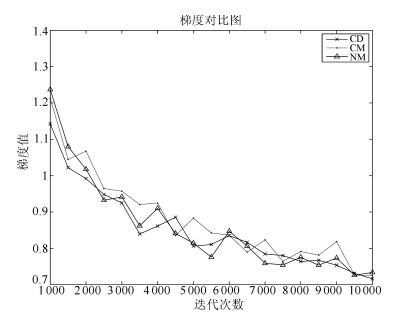
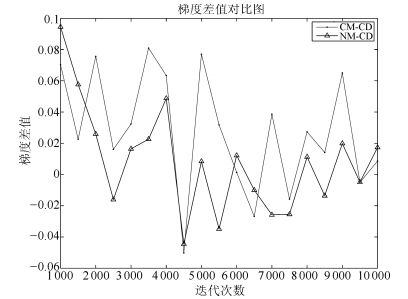
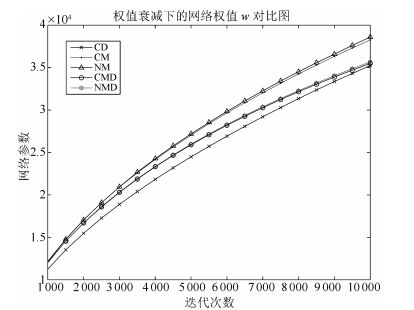
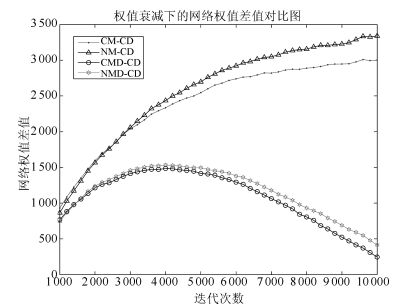
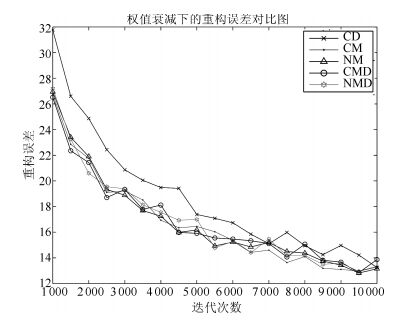
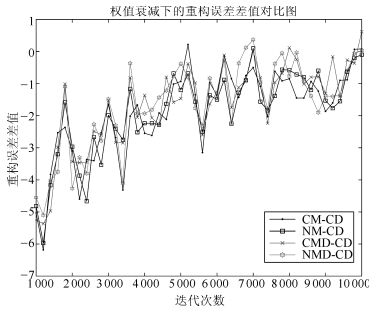
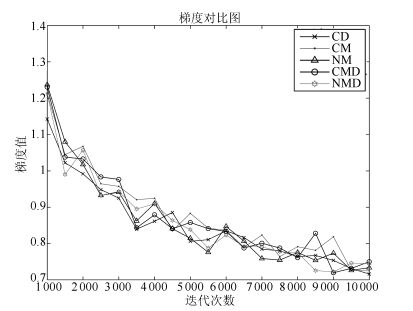
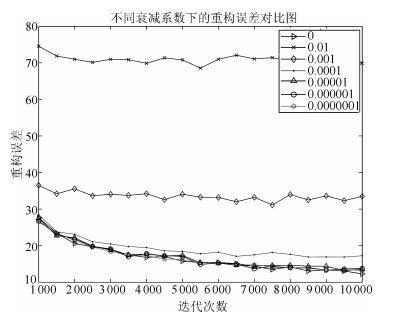
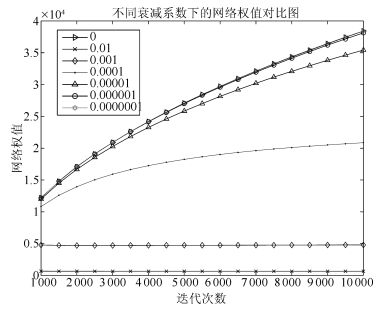
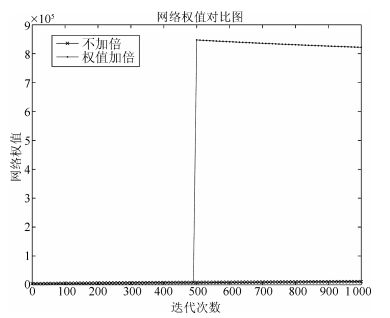
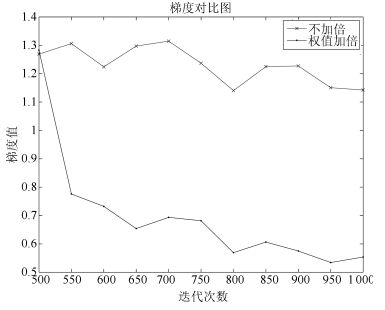
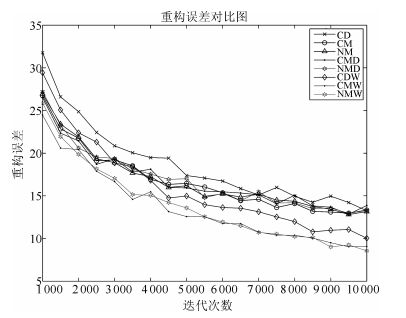
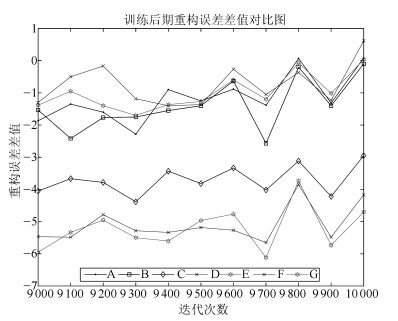
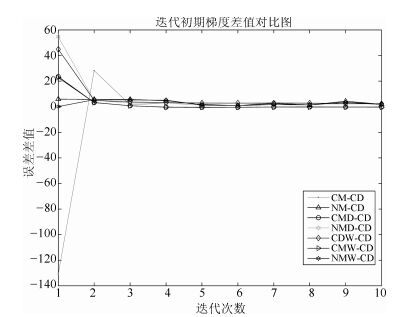
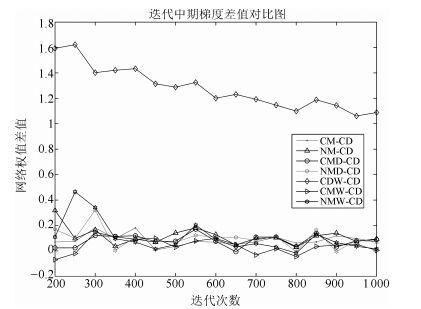
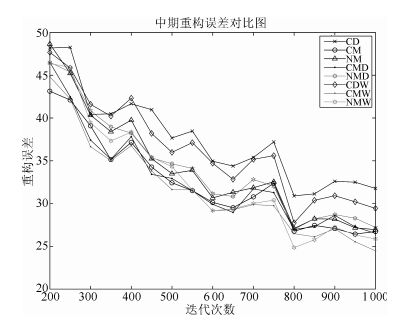
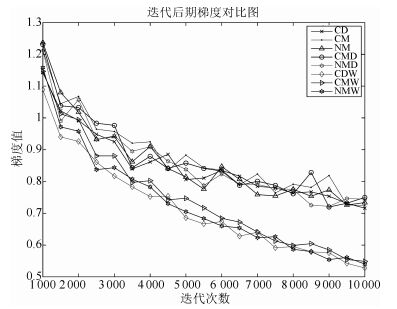
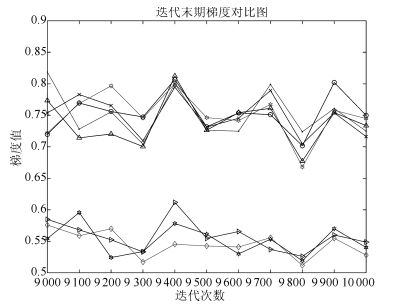
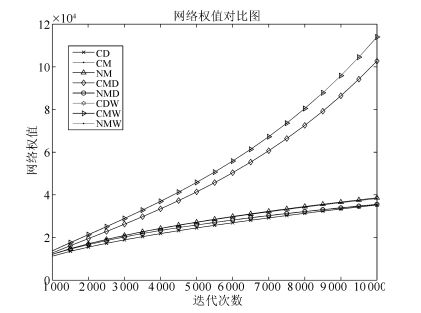
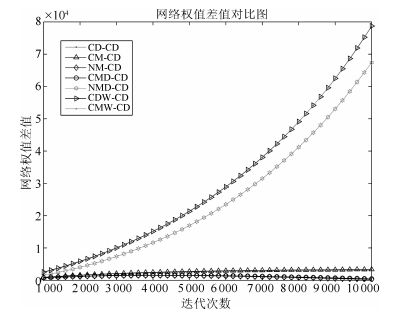
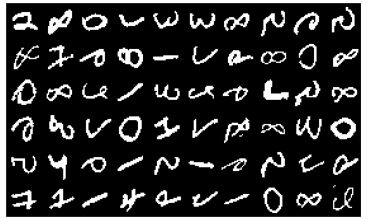
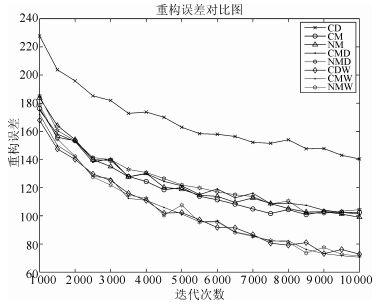
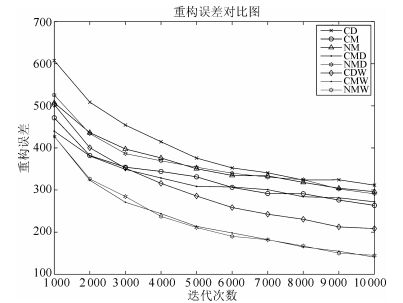
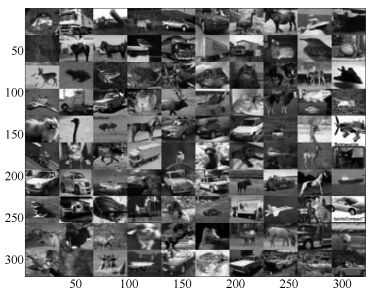
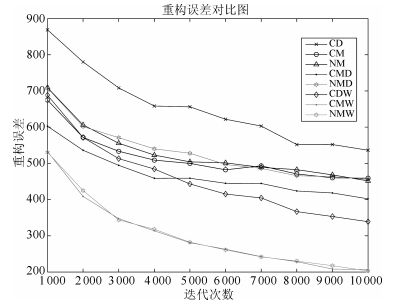
动量算法理论上可以加速受限玻尔兹曼机(Restricted Boltzmann machine,RBM)网络的训练速度.本文通过对现有动量算法进行仿真研究,发现现有动量算法在受限玻尔兹曼机网络训练中加速效果较差,且在训练后期逐渐失去了加速性能.针对以上问题,本文首先基于Gibbs采样收敛性定理对现有动量算法进行了理论分析,证明了现有动量算法的加速效果是以牺牲网络权值为代价的;然后,本文进一步对网络权值进行研究,发现网络权值中包含大量真实梯度的方向信息,这些方向信息可以用来对网络进行训练;基于此,本文提出了基于网络权值的权值动量算法,最后给出了仿真实验.实验结果表明,本文提出的动量算法具有更好的加速效果,并且在训练后期仍然能够保持较好的加速性能,可以很好地弥补现有动量算法的不足.
动量算法理论上可以加速受限玻尔兹曼机(Restricted Boltzmann machine,RBM)网络的训练速度.本文通过对现有动量算法进行仿真研究,发现现有动量算法在受限玻尔兹曼机网络训练中加速效果较差,且在训练后期逐渐失去了加速性能.针对以上问题,本文首先基于Gibbs采样收敛性定理对现有动量算法进行了理论分析,证明了现有动量算法的加速效果是以牺牲网络权值为代价的;然后,本文进一步对网络权值进行研究,发现网络权值中包含大量真实梯度的方向信息,这些方向信息可以用来对网络进行训练;基于此,本文提出了基于网络权值的权值动量算法,最后给出了仿真实验.实验结果表明,本文提出的动量算法具有更好的加速效果,并且在训练后期仍然能够保持较好的加速性能,可以很好地弥补现有动量算法的不足.





2017, 43(7): 1160-1168.
doi: 10.16383/j.aas.2017.c160541
摘要:
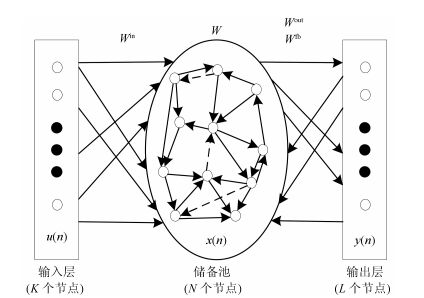
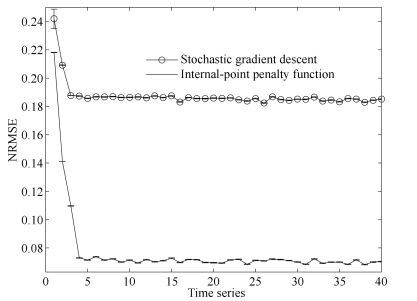
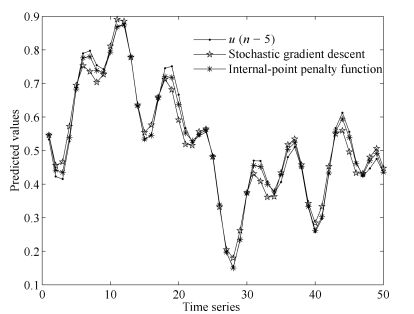
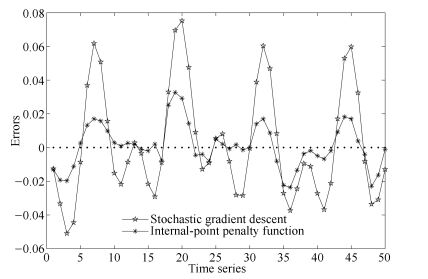
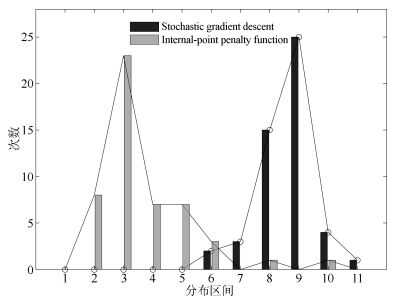
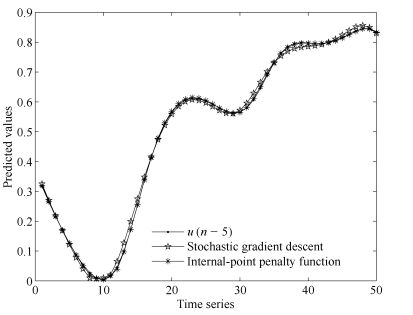
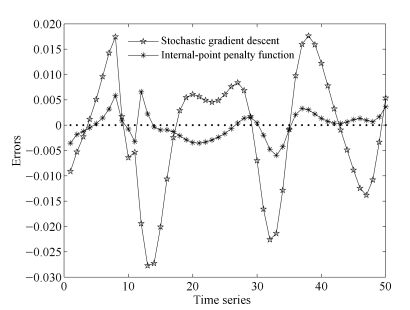
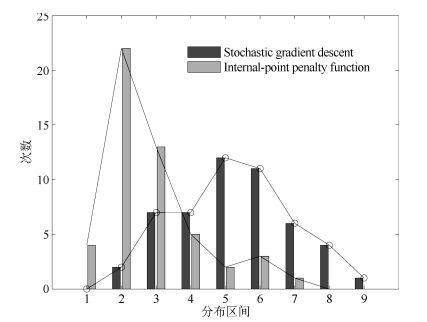
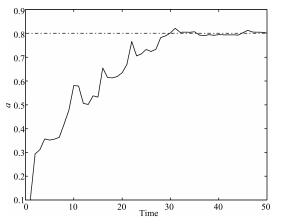
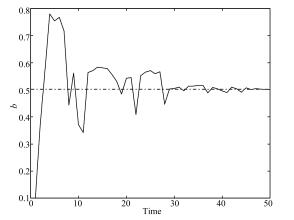
为了提升泄露积分型回声状态网(Leaky integrator echo state network,Leaky-ESN)的性能,提出利用罚函数内点法优化Leaky-ESN的全局参数,如泄漏率、内部连接权矩阵谱半径、输入比例因子等,这克服了通过反复试验法选取参数值而降低了Leaky-ESN模型的优越性和性能.Leaky-ESN的全局参数必须保障回声状态网满足回声状态特性,因此它们之间存在不等式约束条件.有学者提出利用随机梯度下降法来优化内部连接权矩阵谱半径、输入比例因子、泄露率三个全局参数,一定程度上提高了Leaky-ESN的逼近精度.然而,随机梯度下降法是解决无约束优化问题的基本算法,在利用随机梯度下降法优化参数时,没有考虑参数必须满足回声特性的约束条件(不等式约束条件),致使得到的参数值不是最优解.由于罚函数内点法可以求解具有不等式约束的最优化问题,应用范围广,收敛速度较快,具有很强的全局寻优能力.因此,本文提出利用罚函数内点法优化Leaky-ESN的全局参数,并以时间序列预测为例,检验优化后的Leaky-ESN的预测性能,仿真结果表明了本文提出方法的有效性.
为了提升泄露积分型回声状态网(Leaky integrator echo state network,Leaky-ESN)的性能,提出利用罚函数内点法优化Leaky-ESN的全局参数,如泄漏率、内部连接权矩阵谱半径、输入比例因子等,这克服了通过反复试验法选取参数值而降低了Leaky-ESN模型的优越性和性能.Leaky-ESN的全局参数必须保障回声状态网满足回声状态特性,因此它们之间存在不等式约束条件.有学者提出利用随机梯度下降法来优化内部连接权矩阵谱半径、输入比例因子、泄露率三个全局参数,一定程度上提高了Leaky-ESN的逼近精度.然而,随机梯度下降法是解决无约束优化问题的基本算法,在利用随机梯度下降法优化参数时,没有考虑参数必须满足回声特性的约束条件(不等式约束条件),致使得到的参数值不是最优解.由于罚函数内点法可以求解具有不等式约束的最优化问题,应用范围广,收敛速度较快,具有很强的全局寻优能力.因此,本文提出利用罚函数内点法优化Leaky-ESN的全局参数,并以时间序列预测为例,检验优化后的Leaky-ESN的预测性能,仿真结果表明了本文提出方法的有效性.

2017, 43(7): 1169-1177.
doi: 10.16383/j.aas.2017.c160591
摘要:
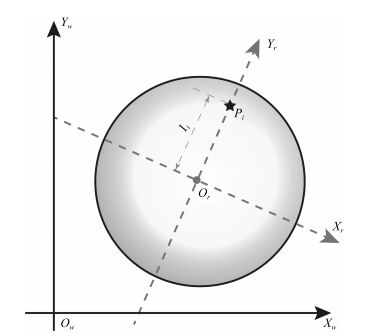
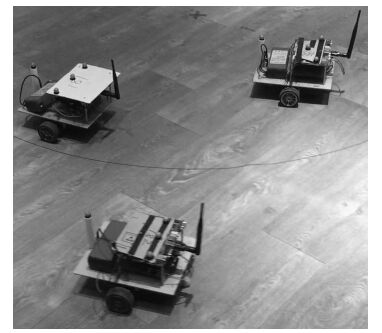
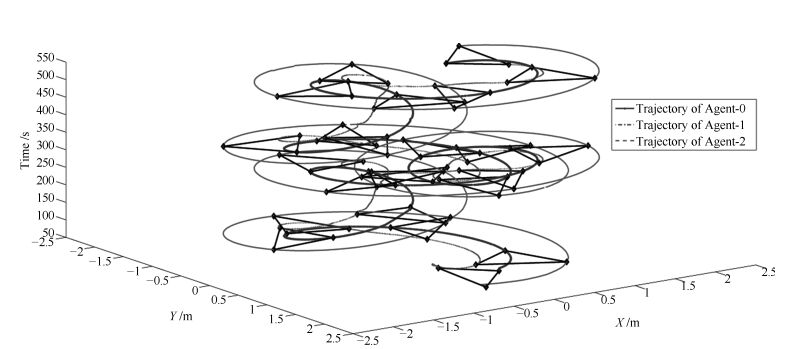
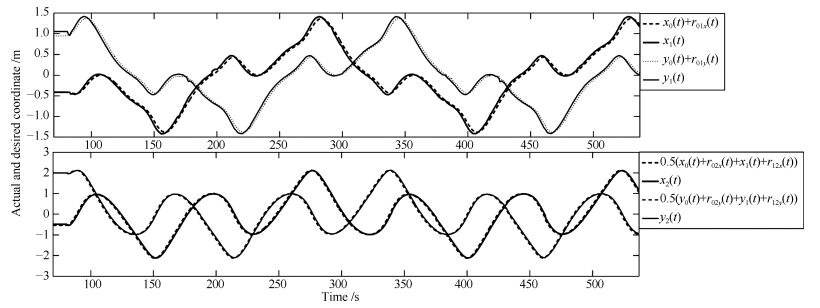
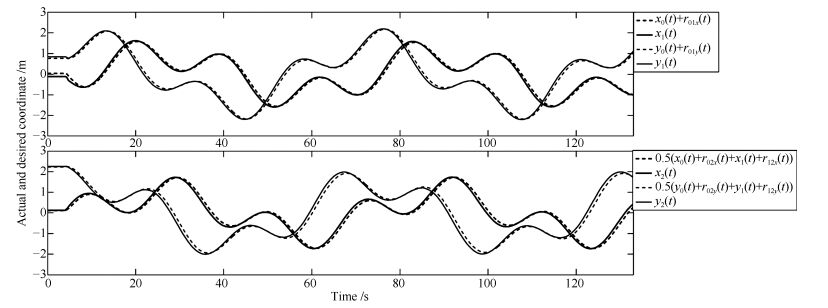
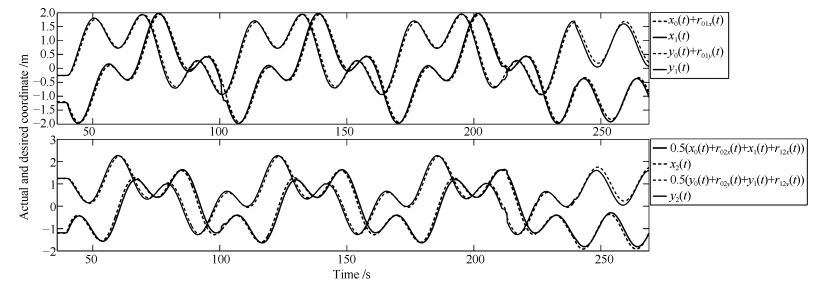
多智能体的通用一致性协议被广泛用于智能体的编队控制问题中.在实际工程中,多智能体系统为了完成期望的协作控制,智能体之间的位置关系通常是时变的.目前,在多智能体编队控制问题中,尽管已有研究成果能够解决多智能体某些特殊类型的时变编队控制,但对一般性的时变编队还没有成熟的研究成果.本文以受非完整性约束的平面多智能体为研究对象,提出了平面非完整性多智能体的位置时变一致性协议.实验结果表明:本文提出的位置时变一致性协议能够有效解决平面非完整性多智能体系统一般性的时变编队问题.
多智能体的通用一致性协议被广泛用于智能体的编队控制问题中.在实际工程中,多智能体系统为了完成期望的协作控制,智能体之间的位置关系通常是时变的.目前,在多智能体编队控制问题中,尽管已有研究成果能够解决多智能体某些特殊类型的时变编队控制,但对一般性的时变编队还没有成熟的研究成果.本文以受非完整性约束的平面多智能体为研究对象,提出了平面非完整性多智能体的位置时变一致性协议.实验结果表明:本文提出的位置时变一致性协议能够有效解决平面非完整性多智能体系统一般性的时变编队问题.


2017, 43(7): 1178-1189.
doi: 10.16383/j.aas.2017.c160316
摘要:
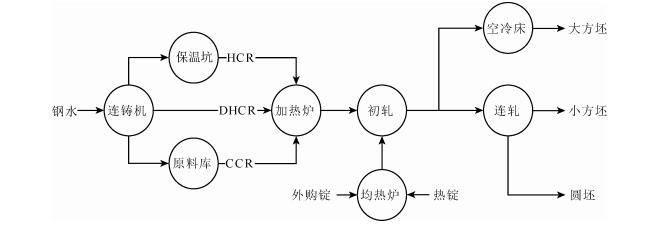
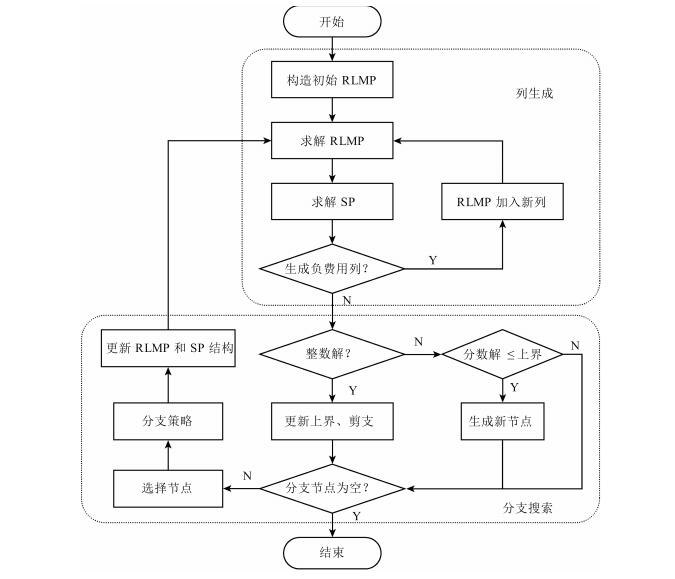
研究了连铸——轧制在热装、温装和冷装混流生产模式下的一类新型轧批调度问题.以最小化温装钢坯(热钢锭)缓冷(等待)导致的热能损失和连轧机架切换带来的产能损失为目标,建立了整数规划模型.由于商业优化软件难以在有限时间内直接求得模型的最优解甚至可行解,提出利用Dantzig-Wolfe分解技术将原模型分解为主问题和子问题,采用列生成算法对主问题和子问题进行迭代求解得到原问题的紧下界,最后以列生成算法作为定界机制嵌入分支——定界框架中形成分支——定价算法,执行分支搜索过程以获得整数最优解.本文还从影响分支——定价算法性能的要素出发提出改进策略.针对主问题,提出列生成和拉格朗日松弛混合求解策略来抑制单一列生成算法的尾效应.针对价格子问题,在动态规划算法中提出了基于占优规则和标号下界计算方法来及早消除无效状态空间,加速求解过程.以钢铁企业的实际生产数据和扩展的随机算例进行了数值实验,结果显示所提出改进策略能够突破求解能力的限制,使分支——定价算法在可接受计算时间内求得工业规模问题的最优解.
研究了连铸——轧制在热装、温装和冷装混流生产模式下的一类新型轧批调度问题.以最小化温装钢坯(热钢锭)缓冷(等待)导致的热能损失和连轧机架切换带来的产能损失为目标,建立了整数规划模型.由于商业优化软件难以在有限时间内直接求得模型的最优解甚至可行解,提出利用Dantzig-Wolfe分解技术将原模型分解为主问题和子问题,采用列生成算法对主问题和子问题进行迭代求解得到原问题的紧下界,最后以列生成算法作为定界机制嵌入分支——定界框架中形成分支——定价算法,执行分支搜索过程以获得整数最优解.本文还从影响分支——定价算法性能的要素出发提出改进策略.针对主问题,提出列生成和拉格朗日松弛混合求解策略来抑制单一列生成算法的尾效应.针对价格子问题,在动态规划算法中提出了基于占优规则和标号下界计算方法来及早消除无效状态空间,加速求解过程.以钢铁企业的实际生产数据和扩展的随机算例进行了数值实验,结果显示所提出改进策略能够突破求解能力的限制,使分支——定价算法在可接受计算时间内求得工业规模问题的最优解.
2017, 43(7): 1190-1201.
doi: 10.16383/j.aas.2017.c160190
摘要:
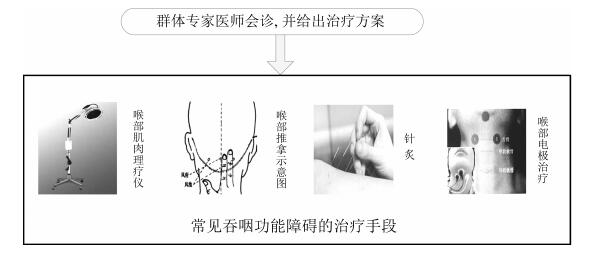
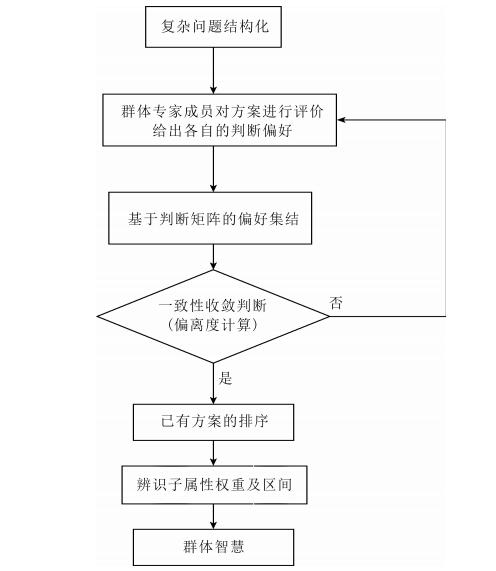
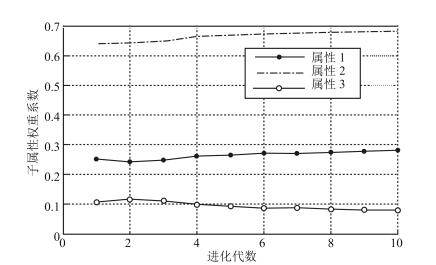
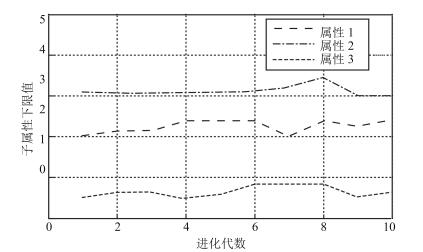
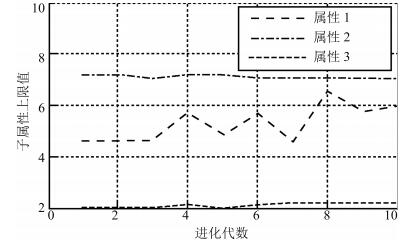
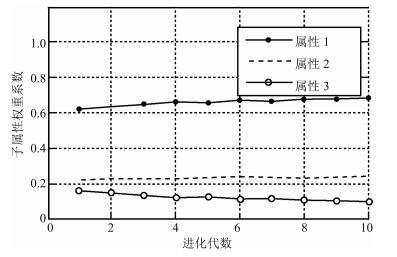
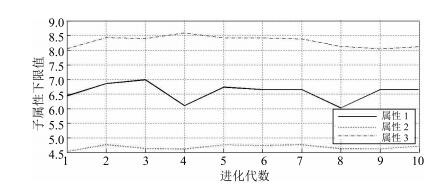
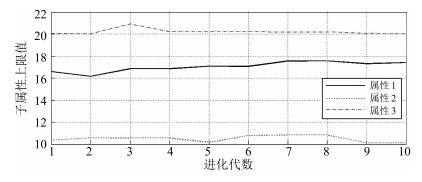
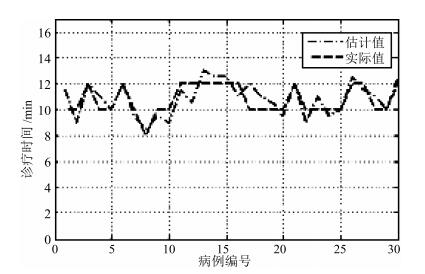
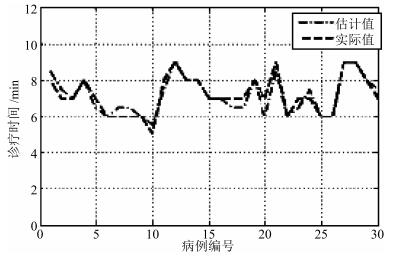
传统的中风后吞咽功能障碍康复治疗方案的制订通常以会诊方式,需要群体专家对所有可能的备选治疗方案进行讨论与决策,增加专家主观疲劳,且缺乏针对群体治疗智慧涌现方法的探讨,基层康复医师难以学习群体专家治疗智慧.基于多属性群决策理论,本文提出了群体智慧定义,给出了基于"专家讨论后的备选方案排序结果——子属性特征"的群体智慧涌现方法以及基于群体智慧的多属性决策方法,使计算机逐步学习群体专家经验并代替专家决策,减轻群体专家疲劳感,并具备针对未知备选方案进行自动决策的能力.针对一类数值实例,对传统多属性决策方法与所提决策方法进行了对比,并将所提方法应用于一类实际中风后吞咽功能障碍康复治疗中,验证了本文所提方法的正确性与可行性.
传统的中风后吞咽功能障碍康复治疗方案的制订通常以会诊方式,需要群体专家对所有可能的备选治疗方案进行讨论与决策,增加专家主观疲劳,且缺乏针对群体治疗智慧涌现方法的探讨,基层康复医师难以学习群体专家治疗智慧.基于多属性群决策理论,本文提出了群体智慧定义,给出了基于"专家讨论后的备选方案排序结果——子属性特征"的群体智慧涌现方法以及基于群体智慧的多属性决策方法,使计算机逐步学习群体专家经验并代替专家决策,减轻群体专家疲劳感,并具备针对未知备选方案进行自动决策的能力.针对一类数值实例,对传统多属性决策方法与所提决策方法进行了对比,并将所提方法应用于一类实际中风后吞咽功能障碍康复治疗中,验证了本文所提方法的正确性与可行性.

2017, 43(7): 1202-1207.
doi: 10.16383/j.aas.2017.c160493
摘要:
对于普遍存在的具有未知参数的随机最优控制问题,本文提出了一种具有学习特点的控制器设计算法.该算法用Kalman滤波估计系统的未知参数,在滚动优化机制下用动态规划获取控制增益,为了赋予控制器的学习特点,在LQG控制律中附加使下一时刻估计方差最小的学习控制分量.仿真结果表明了算法的有效性.
对于普遍存在的具有未知参数的随机最优控制问题,本文提出了一种具有学习特点的控制器设计算法.该算法用Kalman滤波估计系统的未知参数,在滚动优化机制下用动态规划获取控制增益,为了赋予控制器的学习特点,在LQG控制律中附加使下一时刻估计方差最小的学习控制分量.仿真结果表明了算法的有效性.

2017, 43(7): 1208-1219.
doi: 10.16383/j.aas.2017.c150654
摘要:
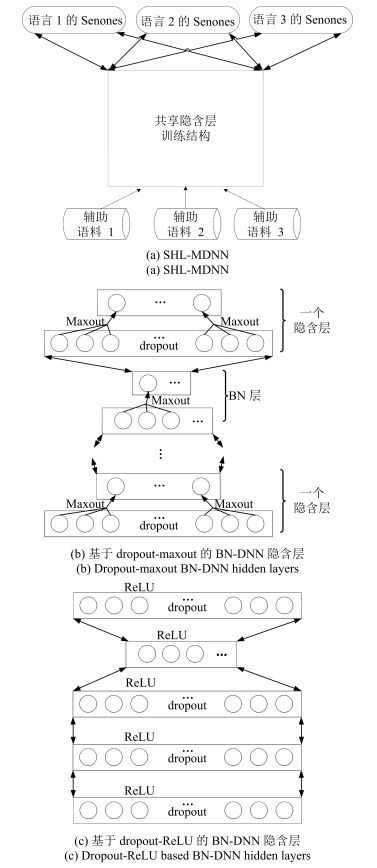
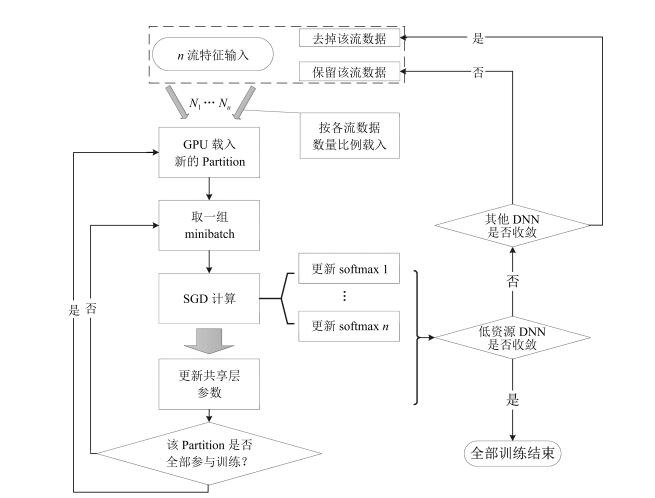
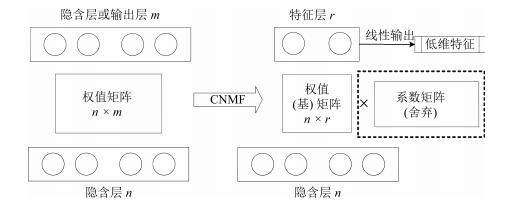
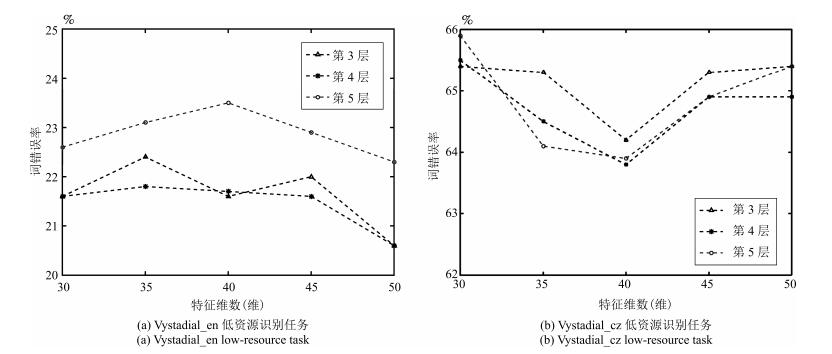
针对低资源训练数据条件下深层神经网络(Deep neural network,DNN)特征声学建模性能急剧下降的问题,提出两种适合于低资源语音识别的深层神经网络特征提取方法.首先基于隐含层共享训练的网络结构,借助资源较为丰富的语料实现对深层瓶颈神经网络的辅助训练,针对BN层位于共享层的特点,引入Dropout,Maxout,Rectified linear units等技术改善多流训练样本分布不规律导致的过拟合问题,同时缩小网络参数规模、降低训练耗时;其次为了改善深层神经网络特征提取方法,提出一种基于凸非负矩阵分解(Convex-non-negative matrix factorization,CNMF)算法的低维高层特征提取技术,通过对网络的权值矩阵分解得到基矩阵作为特征层的权值矩阵,然后从该层提取一种新的低维特征.基于Vystadial 2013的1小时低资源捷克语训练语料的实验表明,在26.7小时的英语语料辅助训练下,当使用Dropout和Rectified linear units时,识别率相对基线系统提升7.0%;当使用Dropout和Maxout时,识别率相对基线系统提升了12.6%,且网络参数数量相对其他系统降低了62.7%,训练时间降低了25%.而基于矩阵分解的低维特征在单语言训练和辅助训练的两种情况下都取得了优于瓶颈特征(Bottleneck features,BNF)的识别率,且在辅助训练的情况下优于深层神经网络隐马尔科夫识别系统,提升幅度从0.8%~3.4%不等.
针对低资源训练数据条件下深层神经网络(Deep neural network,DNN)特征声学建模性能急剧下降的问题,提出两种适合于低资源语音识别的深层神经网络特征提取方法.首先基于隐含层共享训练的网络结构,借助资源较为丰富的语料实现对深层瓶颈神经网络的辅助训练,针对BN层位于共享层的特点,引入Dropout,Maxout,Rectified linear units等技术改善多流训练样本分布不规律导致的过拟合问题,同时缩小网络参数规模、降低训练耗时;其次为了改善深层神经网络特征提取方法,提出一种基于凸非负矩阵分解(Convex-non-negative matrix factorization,CNMF)算法的低维高层特征提取技术,通过对网络的权值矩阵分解得到基矩阵作为特征层的权值矩阵,然后从该层提取一种新的低维特征.基于Vystadial 2013的1小时低资源捷克语训练语料的实验表明,在26.7小时的英语语料辅助训练下,当使用Dropout和Rectified linear units时,识别率相对基线系统提升7.0%;当使用Dropout和Maxout时,识别率相对基线系统提升了12.6%,且网络参数数量相对其他系统降低了62.7%,训练时间降低了25%.而基于矩阵分解的低维特征在单语言训练和辅助训练的两种情况下都取得了优于瓶颈特征(Bottleneck features,BNF)的识别率,且在辅助训练的情况下优于深层神经网络隐马尔科夫识别系统,提升幅度从0.8%~3.4%不等.
2017, 43(7): 1220-1233.
doi: 10.16383/j.aas.2017.c160250
摘要:
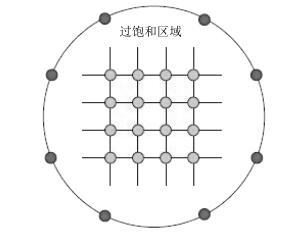
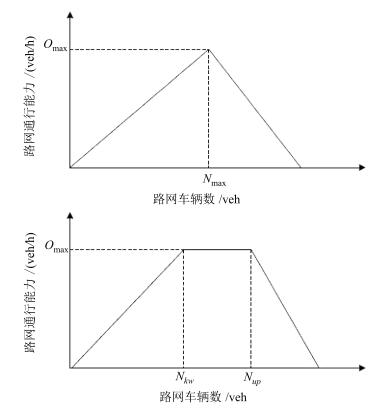
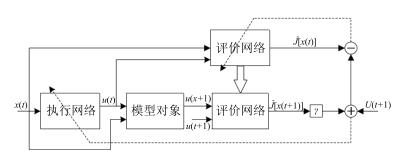
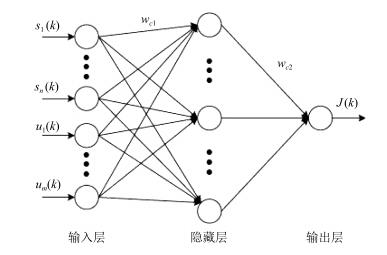
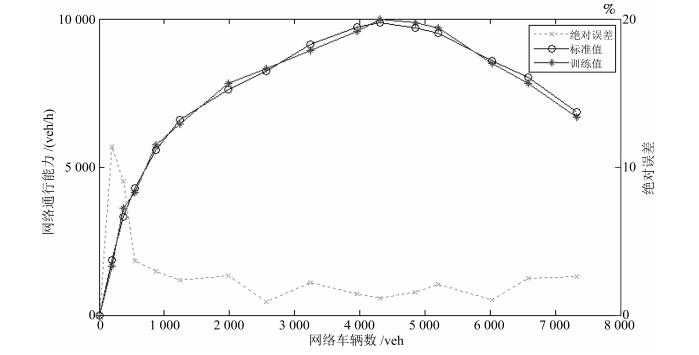
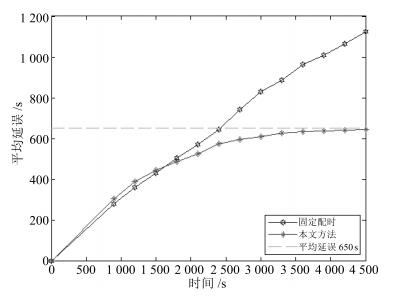
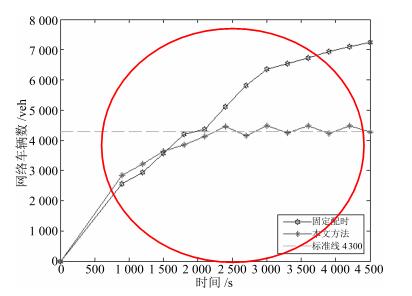
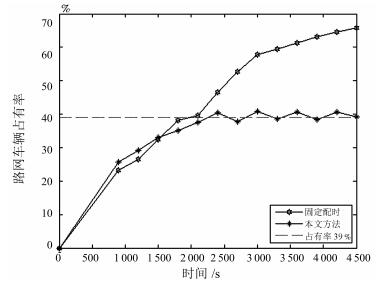
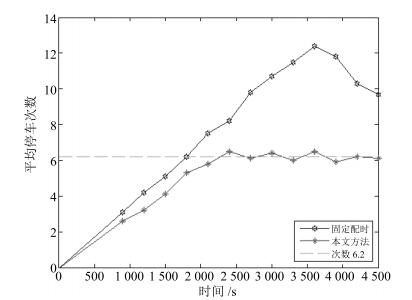
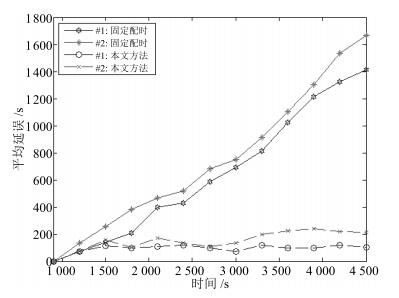
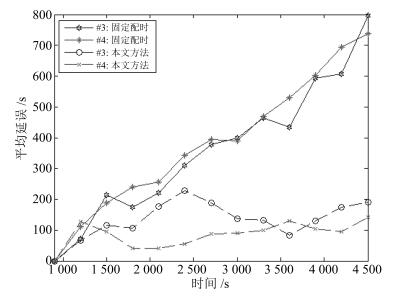
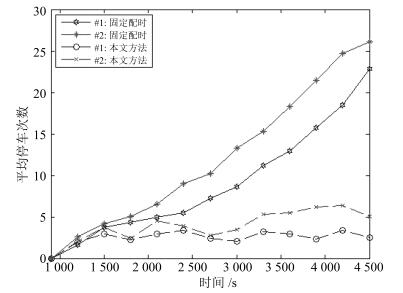
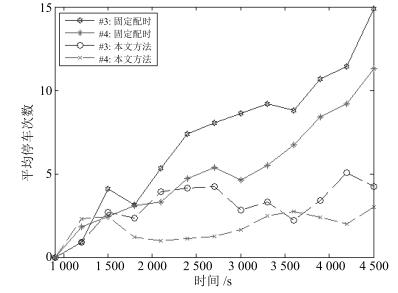
为了解决交通高峰时段城市区域路网过大的交通需求引起的路网通行效率下降以及区域内部交通流分布的异质性产生的道路资源浪费等问题.本文提出了基于区域路网固有属性宏观基本图(Macroscopic fundamental diagram,MFD)的过饱和区域控制优化模型,建立了边界控制信号和内部控制信号目标函数的双层规划优化,进一步设计了基于BP(Back propagation)神经网络的自适应动态规划(Adaptive dynamic programming,ADP)模型,对建立的双层规划区域交通信号进行求解,实例仿真结果验证了本文方法的有效性.通过本文的研究分析,对城市区域交通的需求管控、拥堵政策制定等城市区域交通管理具有一定的指导意义.
为了解决交通高峰时段城市区域路网过大的交通需求引起的路网通行效率下降以及区域内部交通流分布的异质性产生的道路资源浪费等问题.本文提出了基于区域路网固有属性宏观基本图(Macroscopic fundamental diagram,MFD)的过饱和区域控制优化模型,建立了边界控制信号和内部控制信号目标函数的双层规划优化,进一步设计了基于BP(Back propagation)神经网络的自适应动态规划(Adaptive dynamic programming,ADP)模型,对建立的双层规划区域交通信号进行求解,实例仿真结果验证了本文方法的有效性.通过本文的研究分析,对城市区域交通的需求管控、拥堵政策制定等城市区域交通管理具有一定的指导意义.



2017, 43(7): 1241-1247.
doi: 10.16383/j.aas.2017.e150319
摘要:
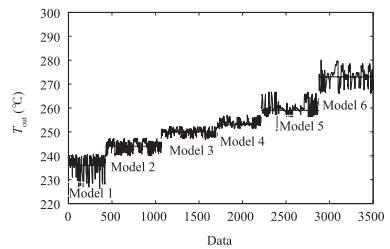
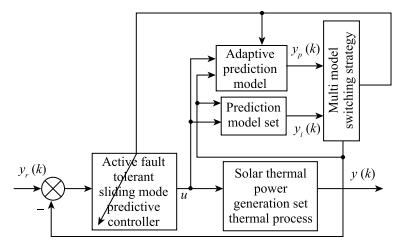
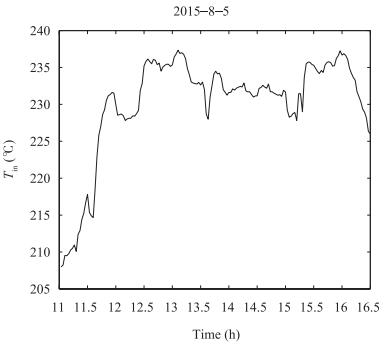
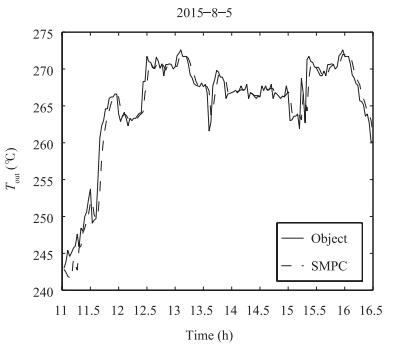
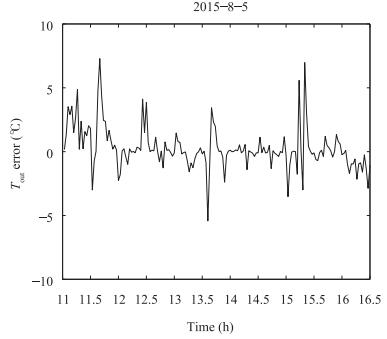
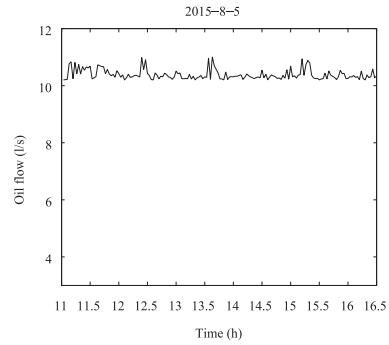
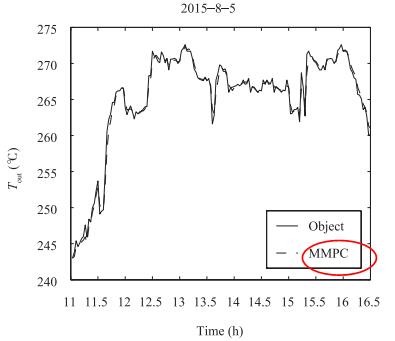
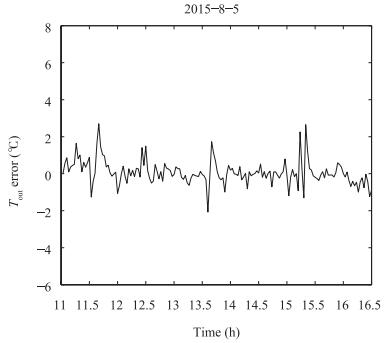
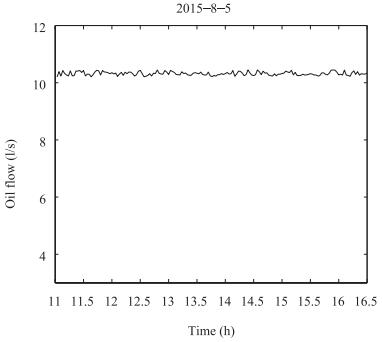
To address the stability of solar thermal power generation system which is characterized by the presence of random and strong disturbance, a multi-model active fault-tolerant controller is designed in this paper. Actually measured data is used to make fuzzy clustering, then multi-model of the collector subsystem is established through recursive least square method. A switching strategy based on the minimum cumulative error is applied to select the optimal control model online. In order to reduce the error caused by missing data, fault and strong disturbance in the process of building the multi-model, the adaptive prediction model of solar collector system is established. Active fault tolerant sliding mode predictive controller is designed to improve the tracking accuracy and robustness of the output. Finally, the validity and advantage of the proposed algorithm are verified.
To address the stability of solar thermal power generation system which is characterized by the presence of random and strong disturbance, a multi-model active fault-tolerant controller is designed in this paper. Actually measured data is used to make fuzzy clustering, then multi-model of the collector subsystem is established through recursive least square method. A switching strategy based on the minimum cumulative error is applied to select the optimal control model online. In order to reduce the error caused by missing data, fault and strong disturbance in the process of building the multi-model, the adaptive prediction model of solar collector system is established. Active fault tolerant sliding mode predictive controller is designed to improve the tracking accuracy and robustness of the output. Finally, the validity and advantage of the proposed algorithm are verified.


2017, 43(7): 1248-1256.
doi: 10.16383/j.aas.2017.e150274
摘要:
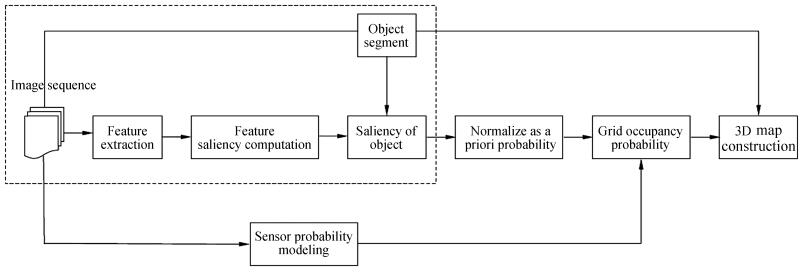
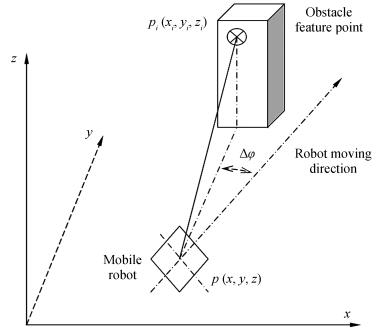
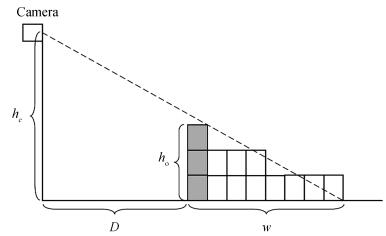
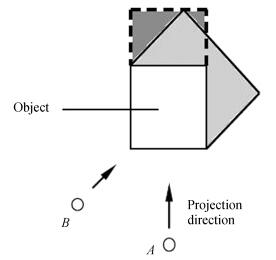
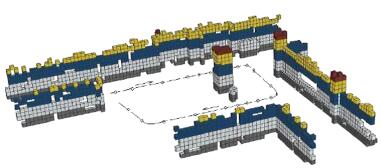
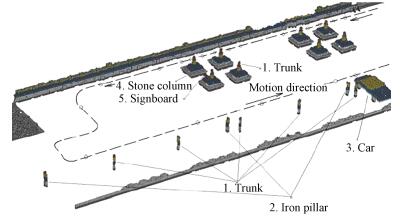
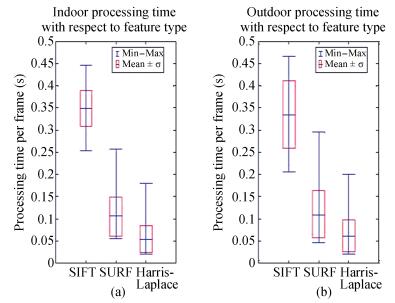
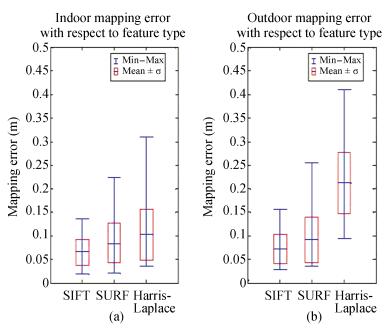
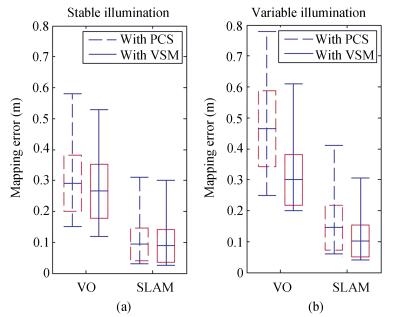
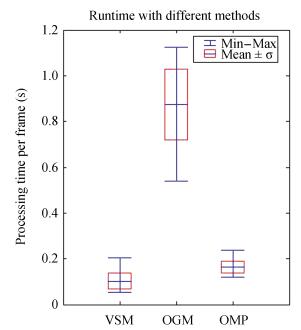
Human visual attention is highly selective. The artificial vision system that imitates this mechanism increases the efficiency, intelligence, and robustness of mobile robots in environment modeling. This paper presents a 3-D modeling method based on visual attention for mobile robots. This method uses the distance-potential gradient as motion contrast and combines the visual features extracted from the scene with a mean shift segment algorithm to detect conspicuous objects in the surrounding environment. This method takes the saliency of objects as priori information, uses Bayes' theorem to fuse sensor modeling and grid priori modeling, and uses the projection method to create and update the 3-D environment modeling. The results of the experiments and performance evaluation illustrate the capabilities of our approach in generating accurate 3-D maps.
Human visual attention is highly selective. The artificial vision system that imitates this mechanism increases the efficiency, intelligence, and robustness of mobile robots in environment modeling. This paper presents a 3-D modeling method based on visual attention for mobile robots. This method uses the distance-potential gradient as motion contrast and combines the visual features extracted from the scene with a mean shift segment algorithm to detect conspicuous objects in the surrounding environment. This method takes the saliency of objects as priori information, uses Bayes' theorem to fuse sensor modeling and grid priori modeling, and uses the projection method to create and update the 3-D environment modeling. The results of the experiments and performance evaluation illustrate the capabilities of our approach in generating accurate 3-D maps.



2017, 43(7): 1257-1264.
doi: 10.16383/j.aas.2017.e160014
摘要:
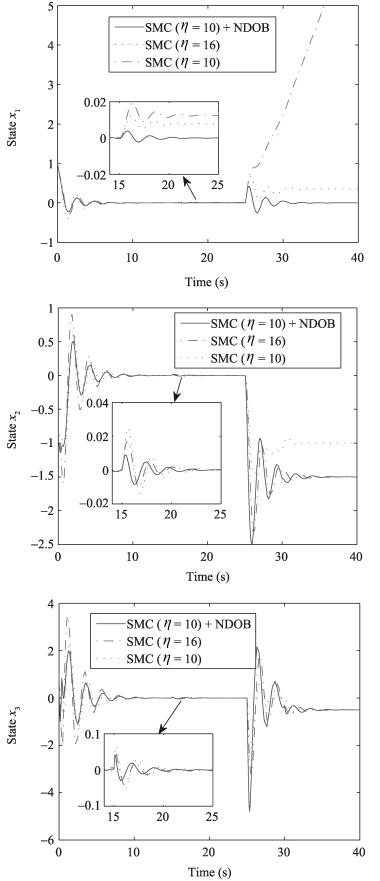
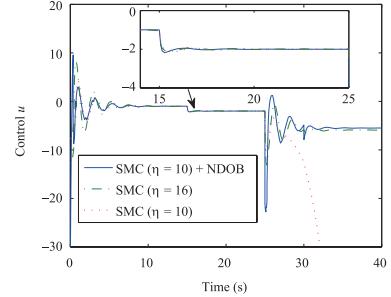
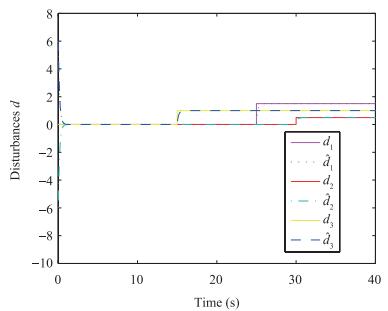
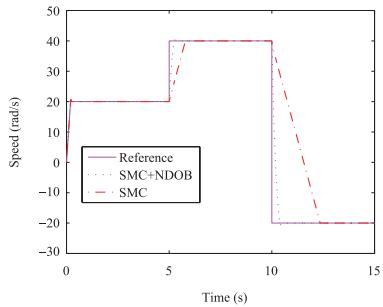
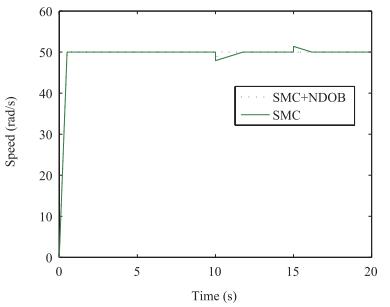
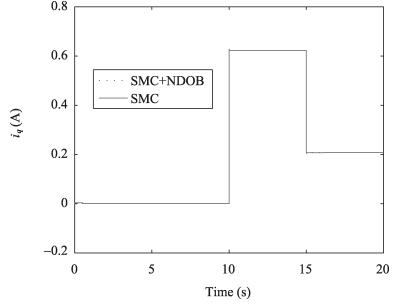
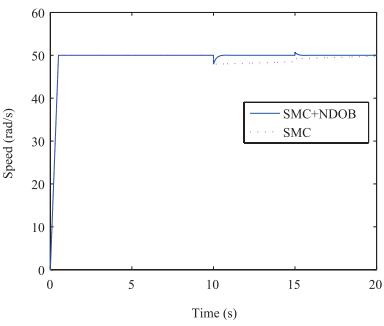
This paper proposes a novel sliding mode control (SMC) approach for general nth order systems with matched and mismatched uncertainties and disturbances based on nonlinear disturbance observer (NDOB). By designing a novel sliding mode manifold integrated with a disturbance estimation technique, a NDOB-based SMC method is designed for these systems. As compared with the nominal SMC method, the proposed method obtains a better disturbance rejection ability in the presence of matched and mismatched uncertainties and disturbances, it can ensure a satisfactory system performance and reduce the chattering in case of reducing the switching gain. A rigorous stability analysis of the composite closed-loop system is provided using Lyapunov theory and input-to-state stable concept. Finally, two simulation results are provided to verify the effectiveness of the proposed control method.
This paper proposes a novel sliding mode control (SMC) approach for general nth order systems with matched and mismatched uncertainties and disturbances based on nonlinear disturbance observer (NDOB). By designing a novel sliding mode manifold integrated with a disturbance estimation technique, a NDOB-based SMC method is designed for these systems. As compared with the nominal SMC method, the proposed method obtains a better disturbance rejection ability in the presence of matched and mismatched uncertainties and disturbances, it can ensure a satisfactory system performance and reduce the chattering in case of reducing the switching gain. A rigorous stability analysis of the composite closed-loop system is provided using Lyapunov theory and input-to-state stable concept. Finally, two simulation results are provided to verify the effectiveness of the proposed control method.

2017, 43(7): 1265-1272.
doi: 10.16383/j.aas.2017.e160025
摘要:
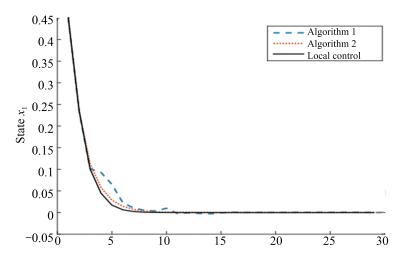
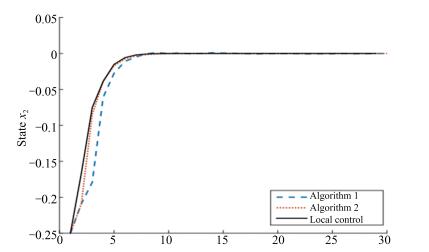
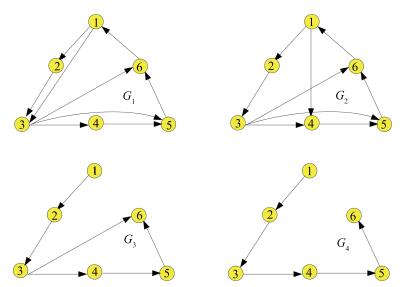
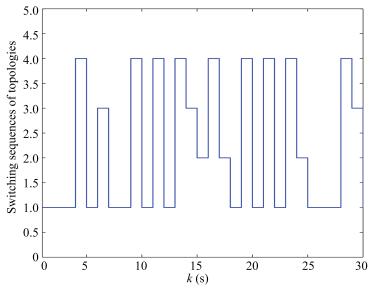
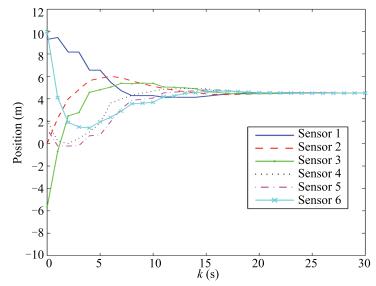
This paper studies the guaranteed consensus of mobile sensor networks (MSNs) with stochastic switching topologies. The switching of topology is triggered by a Markov chain, whose initial and transition probabilities are partially unknown. Each topology in the switching topology set is a directed graph with a spanning tree. A set of distributed switching consensus controllers are derived by means of stability analysis of Markovian jump systems. This is achieved by defining a novel topology-aware cost function of the MSNs involving cost consumption for information receiving, sending and control. By state transformation, the initial dynamics of MSN is reduced to a Markovian jump system with guaranteed cost. A computational algorithm is proposed to simultaneously calculate both the sub-optimal controller gains and the sub-minimal upper cost bound. Eventually, the performance of the controller design method is verified by numerical examples.
This paper studies the guaranteed consensus of mobile sensor networks (MSNs) with stochastic switching topologies. The switching of topology is triggered by a Markov chain, whose initial and transition probabilities are partially unknown. Each topology in the switching topology set is a directed graph with a spanning tree. A set of distributed switching consensus controllers are derived by means of stability analysis of Markovian jump systems. This is achieved by defining a novel topology-aware cost function of the MSNs involving cost consumption for information receiving, sending and control. By state transformation, the initial dynamics of MSN is reduced to a Markovian jump system with guaranteed cost. A computational algorithm is proposed to simultaneously calculate both the sub-optimal controller gains and the sub-minimal upper cost bound. Eventually, the performance of the controller design method is verified by numerical examples.

2017, 43(7): 1273-1279.
doi: 10.16383/j.aas.2017.e140146
摘要:
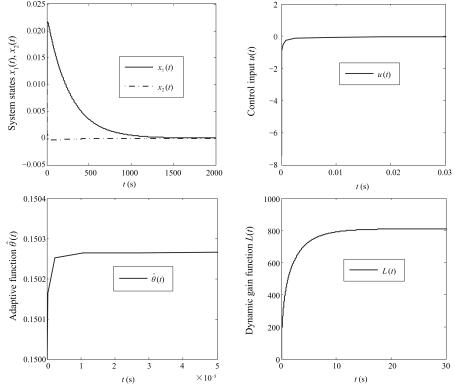
This paper considers the adaptive stabilization of a class of high-order uncertain nonlinear feedforward systems. The growth condition on nonlinearities is further relaxed by allowing not only input and state delays but also the unknown growth rate. By a combined method of adaptive technique, dynamic gain control approach and adding a power integrator technique, a state feedback controller is designed to guarantee that all signals are bounded, the equilibrium point of the closed-loop system is globally stable and the original state converges to zero.
This paper considers the adaptive stabilization of a class of high-order uncertain nonlinear feedforward systems. The growth condition on nonlinearities is further relaxed by allowing not only input and state delays but also the unknown growth rate. By a combined method of adaptive technique, dynamic gain control approach and adding a power integrator technique, a state feedback controller is designed to guarantee that all signals are bounded, the equilibrium point of the closed-loop system is globally stable and the original state converges to zero.
2017, 43(7): 1280-1288.
doi: 10.16383/j.aas.2017.e150304
摘要:
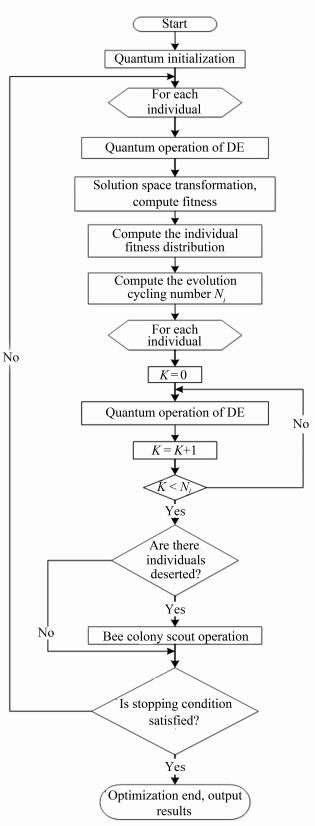
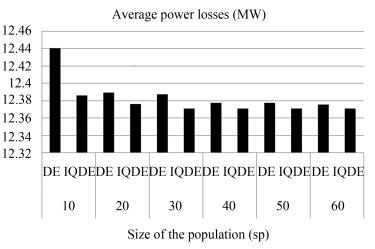
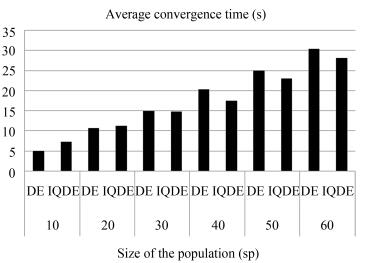
Differential evolution algorithm (DE) has been proved to be an effective way for solving the optimal reactive power flow (ORPF) problem. As distributed generations (DGs) are introduced into the system, there is a certain impact on power flow and voltage of the power system, which affects the robustness and effectiveness of DE. On the basis of DE, aiming at its limitation of premature convergence and poor search ability, this paper discusses about how to improve it with quantum encoding and artificial bee colony (ABC) algorithm and proposes a hybrid algorithm, which is called improved quantum differential evolution algorithm (IQDE). The idea of quantum encoding increases the individual diversity while the accelerating evolution operation of the onlooker bees improves local search ability of DE. At the same time, the random search operation of the scout bees improves global search ability of DE. In the last, the effectiveness of IQDE is verified by simulations on the IEEE 14-bus system and 30-bus system including DGs. The experimental results show that with less convergence time and smaller population size, IQDE can obtain an even or better optimization effect compared with DE and can be applied to ORPF problem of power system including DGs.
Differential evolution algorithm (DE) has been proved to be an effective way for solving the optimal reactive power flow (ORPF) problem. As distributed generations (DGs) are introduced into the system, there is a certain impact on power flow and voltage of the power system, which affects the robustness and effectiveness of DE. On the basis of DE, aiming at its limitation of premature convergence and poor search ability, this paper discusses about how to improve it with quantum encoding and artificial bee colony (ABC) algorithm and proposes a hybrid algorithm, which is called improved quantum differential evolution algorithm (IQDE). The idea of quantum encoding increases the individual diversity while the accelerating evolution operation of the onlooker bees improves local search ability of DE. At the same time, the random search operation of the scout bees improves global search ability of DE. In the last, the effectiveness of IQDE is verified by simulations on the IEEE 14-bus system and 30-bus system including DGs. The experimental results show that with less convergence time and smaller population size, IQDE can obtain an even or better optimization effect compared with DE and can be applied to ORPF problem of power system including DGs.



2017, 43(7): 1234-1240.
doi: 10.16383/j.aas.2017.e160161
摘要:
This paper is concerned with the networked predictive control of discrete-time bilinear systems. To deal with the network-induced communication delay that exists in both forward channel (controller to actuator) and feedback channel (sensor to controller), a bilinear networked predictive control scheme is proposed. Then a non-convex optimization problem of solving the predictive control sequence is presented, for which two gradually-optimized algorithms are proposed based on the special structure of bilinear system dynamics model. The numerical simulation indicates that the resulting predictive control sequence can compensate for the network-induced issues actively, which proves the effectiveness of the proposed predictive control strategy.
This paper is concerned with the networked predictive control of discrete-time bilinear systems. To deal with the network-induced communication delay that exists in both forward channel (controller to actuator) and feedback channel (sensor to controller), a bilinear networked predictive control scheme is proposed. Then a non-convex optimization problem of solving the predictive control sequence is presented, for which two gradually-optimized algorithms are proposed based on the special structure of bilinear system dynamics model. The numerical simulation indicates that the resulting predictive control sequence can compensate for the network-induced issues actively, which proves the effectiveness of the proposed predictive control strategy.