

Branch-and-price Algorithm for Rolling Batch Scheduling Problem in Continuous-casting and Rolling Processes with Hybrid Production Mode
-
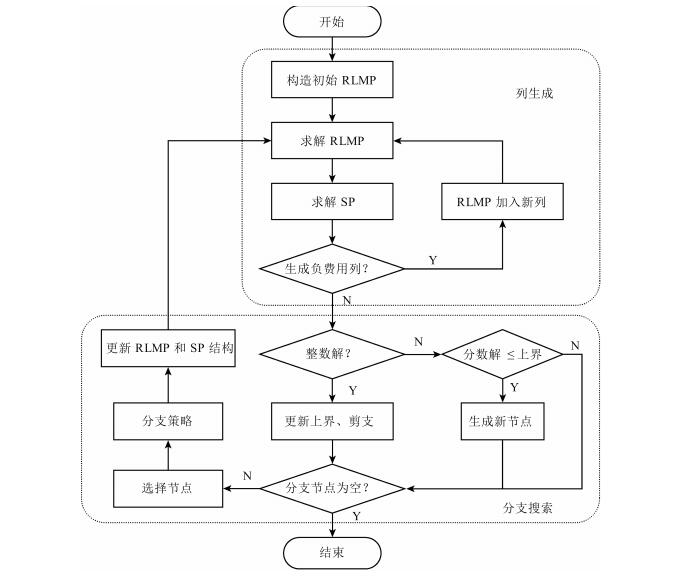
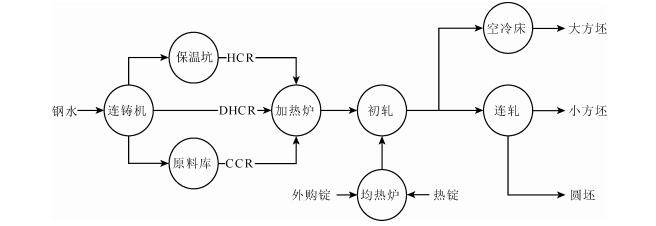
摘要: 研究了连铸——轧制在热装、温装和冷装混流生产模式下的一类新型轧批调度问题.以最小化温装钢坯(热钢锭)缓冷(等待)导致的热能损失和连轧机架切换带来的产能损失为目标,建立了整数规划模型.由于商业优化软件难以在有限时间内直接求得模型的最优解甚至可行解,提出利用Dantzig-Wolfe分解技术将原模型分解为主问题和子问题,采用列生成算法对主问题和子问题进行迭代求解得到原问题的紧下界,最后以列生成算法作为定界机制嵌入分支——定界框架中形成分支——定价算法,执行分支搜索过程以获得整数最优解.本文还从影响分支——定价算法性能的要素出发提出改进策略.针对主问题,提出列生成和拉格朗日松弛混合求解策略来抑制单一列生成算法的尾效应.针对价格子问题,在动态规划算法中提出了基于占优规则和标号下界计算方法来及早消除无效状态空间,加速求解过程.以钢铁企业的实际生产数据和扩展的随机算例进行了数值实验,结果显示所提出改进策略能够突破求解能力的限制,使分支——定价算法在可接受计算时间内求得工业规模问题的最优解.Abstract: This paper studies a new type of rolling batch scheduling problem arising in continuous casting and rolling processes which are linked by the hybrid production mode of direct hot charge rolling (DHCR), hot charge rolling (HCR) and cold charge rolling (CCR). The problem is formulated as an integer programming model with the objective of minimizing heat energy loss due to cooling (Waiting) of HCR slabs (Hot ingots) and productivity loss caused by changeover of rolling shelves. Since the commercial optimization software is difficult to obtain an optimal solution or even a feasible solution of the model within a limited CPU time, the model is decomposed into a master problem and a set of subproblems using the Dantzig-Wolfe decomposition. The master problem and subproblems are iteratively solved through column generation algorithm to obtain a tighter lower bound of the original problem. Finally, the column generation algorithm acting as a bounding mechanism is embedded into the branch-and-bound framework to form a branch-and-price algorithm which performs the branch search process to obtain an integer optimal solution. Furthermore, key factors affecting the performance of the algorithm are analyzed and corresponding improvement strategies are proposed. For the master problem, a solution strategy of hybriding column generation and Lagrangian relaxation is proposed to restrain the tailing-off effect of column generation. For the pricing subproblem, a dominance rule and label lower bound calculation based method is proposed to eliminate non-promising state space early in the dynamic programming algorithm such that the solution procedure is speeded up. Numerical experiments are carried out on actual production data provided by a steel company and random instances extended from actual production data. The results show that the proposed improvement strategies can break through the limitation of the solving ability and enable the branch-and-price algorithm to solve industrial scale problem optimality within an acceptable CPU time.
-
近年来, 基于随机有限集的多目标跟踪算法[1-2]引起了学者们的广泛关注.它从集值估计的角度来解决多目标跟踪问题, 避免了传统多目标跟踪算法中复杂的数据关联过程.众所周知, 数据关联一直是多目标跟踪问题的一个难点, 尤其是在目标个数较多且存在杂波的情况下, 关联过程将变得非常复杂.基于随机有限集的多目标跟踪算法利用随机有限集对多目标的状态和观测建模, 在贝叶斯滤波框架下通过递推后验多目标密度来解决多目标跟踪问题.该类算法主要包括概率假设密度(Probability hypothesis density, PHD)滤波器[3-5]、势概率假设密度(Cardinality PHD, CPHD)滤波器[6-7]和势均衡多目标多伯努利(Cardinality balanced multi-target multi-Bernoulli, CBMeMBer)滤波器[8].不同于PHD和CPHD滤波器递推多目标密度的强度和势分布估计, CBMeMBer滤波器直接近似递推后验多目标密度, 使得多目标跟踪问题的求解显得更为直观.随后, 学者们对CBMeMBer滤波器进行了深入地研究, 并取得了一些研究成果[9-13].
基于随机有限集的多目标跟踪算法主要包括高斯混合(Gaussian mixture, GM)和序贯蒙特卡洛(Sequential Monte Carlo, SMC)两种实现方法.这两种实现方法的前提条件是目标的状态和观测模型为隐马尔科夫模型(Hidden Markov model, HMM), 即目标的状态演化过程是一个马尔科夫过程, 而k时刻目标的量测只与当前时刻目标的状态有关.但在实际应用中, 目标模型不一定满足HMM隐含的马尔科夫假设和独立性假设条件.例如过程噪声与量测噪声相关或量测噪声为有色噪声的情况[14].文献[15-18]等提出一种比HMM更为一般化的Pairwise马尔科夫模型(Pairwise Markov model, PMM), 它将目标的状态和量测整体看作一个马尔科夫过程.与HMM的区别在于: 1)目标的状态不一定为马尔科夫过程; 2)目标的量测不仅与当前时刻的状态有关, 而且与该目标上一时刻的量测也有关系[15].因此, 在解决一些实际问题时采用PMM比采用HMM的效果更好.例如在分割问题中, 采用PMM代替HMM可以有效地降低误差率[19].
本文的研究目的是在PMM框架下利用随机有限集解决杂波环境下的多目标跟踪问题.文献[[20-21]已经给出了在PMM框架下的PHD滤波器及其GM实现.但是当目标数较多时, 该滤波器对目标个数的估计会出现欠估计的情况, 且估计精度和效率较差.本文给出了PMM框架下CBMeMBer滤波器的递推过程, 并给出它在线性高斯PMM条件下的GM实现.最后, 采用文献[21]提出的一种满足HMM局部物理特性的线性高斯PMM, 将本文所提算法与GM-PMM-PHD滤波器进行比较.实验结果表明, 本文所提算法对目标数的估计是无偏的, 不存在GM-PMM-PHD滤波器在目标数较多时出现欠估计的情况, 并且本文所提算法的估计精度和效率也优于GM-PMM-PHD滤波器.
1. HMM和PMM
1.1 HMM
在信号处理过程中, 一个重要问题是根据可观测的量测$y\!=\!{{\left\{ {{\mathit{\boldsymbol{y}}}_{k}} \right\}}_{k\in \rm{IN}}}$估计不可观测的状态$x\!=\!{{\left\{ {{\mathit{\boldsymbol{x}}}_{k}} \right\}}_{k\in \rm{IN}}}$, IN表示整数.在HMM中, 假设x为马尔科夫过程, 且k时刻的量测${{\mathit{\boldsymbol{y}}}_{k}}$只与当前时刻的状态${{\mathit{\boldsymbol{x}}}_{k}}$有关, 即[15]
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{0:k-1}} \right)=p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right) \end{equation}
(1) \begin{equation}\label{} p\left( {{\mathit{\boldsymbol{y}}}_{0:k}}|{{\mathit{\boldsymbol{x}}}_{0:k}} \right)=\prod\limits_{i=0}^{k}{p\left( {{\mathit{\boldsymbol{y}}}_{i}}|{{\mathit{\boldsymbol{x}}}_{0:k}} \right)} \end{equation}
(2) \begin{equation}\label{} p\left( {{\mathit{\boldsymbol{y}}}_{i}}|{{\mathit{\boldsymbol{x}}}_{0:k}} \right)=p\left( {{\mathit{\boldsymbol{y}}}_{i}}|{{\mathit{\boldsymbol{x}}}_{i}} \right), \quad 0\le i\le k \end{equation}
(3) $p\left( \cdot \right)$表示概率密度函数.状态${{\mathit{\boldsymbol{x}}}_{k}}$的后验概率密度$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$可由Bayes递推算法得到[22]:
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right)=\!\int\!{p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right)p\left( {{\mathit{\boldsymbol{x}}}_{k-1}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right){\rm d}{{\mathit{\boldsymbol{x}}}_{k-1}}} \end{equation}
(4) \begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)\propto p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}} \right)p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right) \end{equation}
(5) 在实际应用中, 由于Bayes公式中存在积分运算, 通常不能得到它的解析解.为了使Bayes公式能够递推运算, 考虑如下线性HMM
\begin{equation}\label{} {{\mathit{\boldsymbol{x}}}_{k}}={{F}_{k}}{{\mathit{\boldsymbol{x}}}_{k-1}}+{{\mathit{\boldsymbol{u}}}_{k}} \end{equation}
(6) \begin{equation}\label{} {{\mathit{\boldsymbol{y}}}_{k}}={{H}_{k}}{{\mathit{\boldsymbol{x}}}_{k}}+{{\mathit{\boldsymbol{v}}}_{k}} \end{equation}
(7) ${{F}_{k}}$和${{H}_{k}}$分别表示状态转移矩阵和观测矩阵. ${{\mathit{\boldsymbol{u}}}_{k}}$和${{\mathit{\boldsymbol{v}}}_{k}}$分别表示零均值的过程噪声和量测噪声, 与初始状态${{\mathit{\boldsymbol{x}}}_{0}}$相互独立.若${{\mathit{\boldsymbol{v}}}_{k}}$、${{\mathit{\boldsymbol{u}}}_{k}}$和${{\mathit{\boldsymbol{x}}}_{0}}$均为高斯变量, 则状态${{\mathit{\boldsymbol{x}}}_{k}}$的后验概率密度$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$为高斯分布, 可以用它的均值和协方差描述.此时, $p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$的Bayes递推过程退化为经典的卡尔曼滤波器[23].
1.2 PMM
在过程噪声与量测噪声相关或量测噪声为有色噪声的情况下, 目标模型不满足HMM隐含的马尔科夫假设和独立性假设条件.此时, 再利用HMM建模是不合适的.文献[15]提出一种比HMM更为一般化的PMM, 它将状态和量测整体$\varepsilon \!=\!\left( x, y \right)$看作马尔科夫过程, 即
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{\varepsilon }}}_{k}}|{{\mathit{\boldsymbol{\varepsilon }}}_{0:k-1}} \right)=p\left( {{\mathit{\boldsymbol{\varepsilon }} }_{k}}|{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}} \right)=p\left( {{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right) \end{equation}
(8) 可以有效地处理上述复杂的目标跟踪场景.
在PMM中, x不一定为马尔科夫过程, 且${{\mathit{\boldsymbol{y}}}_{k}}$不仅与当前时刻的状态${{\mathit{\boldsymbol{x}}}_{k}}$有关, 同时与${{\mathit{\boldsymbol{x}}}_{k-1}}$和${{\mathit{\boldsymbol{y}}}_{k-1}}$也有关系.当$p\left( {{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)$满足
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)=p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right)p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}} \right) \end{equation}
(9) 时, PMM就退化为HMM, 即HMM是PMM的一种特殊情况.在PMM框架下, 状态${{\mathit{\boldsymbol{x}}}_{k}}$的后验概率密度$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$的Bayes公式为[15]
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)\propto \int{p\left( {{\mathit{\boldsymbol{\varepsilon }}}_{k}}|{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}} \right)p\left( {{\mathit{\boldsymbol{x}}}_{k-1}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right){\rm d}{{\mathit{\boldsymbol{x}}}_{k-1}}} \end{equation}
(10) 与HMM框架下的Bayes递推算法的不同之处在于它采用$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)$和$p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)$分别代替$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right)$和$p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}} \right)$.同样, 上式没有解析解.
在线性高斯条件下, PMM模型可以描述为
\begin{equation}\label{} \underbrace{\left[\begin{matrix} {{\mathit{\boldsymbol{x}}}_{k}} \\ {{\mathit{\boldsymbol{y}}}_{k}} \\ \end{matrix} \right]}_{{{\mathit{\boldsymbol{\varepsilon }}}_{k}}}=\underbrace{\left[\begin{matrix} F_{k}^{1}&F_{k}^{2} \\ H_{k}^{1}&H_{k}^{2} \\ \end{matrix} \right]}_{{{B}_{k}}}\underbrace{\left[\begin{matrix} {{\mathit{\boldsymbol{x}}}_{k-1}} \\ {{\mathit{\boldsymbol{y}}}_{k-1}} \\ \end{matrix} \right]}_{{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}}}+{{\mathit{\boldsymbol{w}}}_{k}} \end{equation}
(11) 其中, ${{\left\{ {{\mathit{\boldsymbol{w}}}_{k}} \right\}}_{k\in \rm{IN}}}$表示零均值的高斯白噪声, 它的协方差为
\begin{equation}\label{} {\rm{E}}\left( {{\mathit{\boldsymbol{w}}}_{k}}\mathit{\boldsymbol{w}}_{k}^{\rm{T}} \right)={{\Sigma }_{k}}=\left[\begin{matrix} \Sigma _{k}^{11}&\Sigma _{k}^{12} \\ \Sigma _{k}^{21}&\Sigma _{k}^{22} \\ \end{matrix} \right] \end{equation}
(12) ${{\left\{ {{\mathit{\boldsymbol{w}}}_{k}} \right\}}_{k\in \rm{IN}}}$与初始状态${{\mathit{\boldsymbol{\varepsilon }}}_{0}}$相互独立. ${{\mathit{\boldsymbol{\varepsilon }} }_{0}}$服从正态分布N$\left( \cdot ;{{\mathit{\boldsymbol{m}}}_{0}}, {{P}_{0}} \right)$, ${{\mathit{\boldsymbol{m}}}_{0}}$和${{P}_{0}}$分别表示它的均值和协方差.文献[15]给出了在PMM框架下的卡尔曼滤波器.
2. PMM-CBMeMBer滤波器及其GM实现
文献[8]已经给出在HMM框架下CBMeMBer滤波器的递推过程, 这里不再赘述.下面将直接给出在PMM框架下CBMeMBer滤波器的递推过程, 以及它在线性高斯PMM条件下的GM实现.
2.1 PMM-CBMeMBer滤波器
k时刻监控区域内${{M}_{k}}$个目标的状态集合记为${{X}_{k}}\!\!=\!\!\left\{ \mathit{\boldsymbol{\varepsilon }} _{k}^{\left( i \right)} \right\}_{i=1}^{{{M}_{k}}}$, 其中${{\mathit{\boldsymbol{\varepsilon }}}_{k}}\!\!=\!\!{{\left[\mathit{\boldsymbol{x}}_{k}^{\rm{T}}, \mathit{\boldsymbol{y}}_{k}^{\rm{T}} \right]}^{\rm{T}}}$, ${\mathit{\boldsymbol{x}}_{k}}$和${\mathit{\boldsymbol{y}}_{k}}$分别表示目标的动力学状态和量测.在PMM框架下, $\varepsilon $是一个马尔科夫过程, 它的状态转移概率密度$p\left( {{\mathit{\boldsymbol{\varepsilon }} }_{k}}|{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}} \right)$包含目标的动力学演化模型$p\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}}, {\mathit{\boldsymbol{y}}_{k-1}} \right)$和传感器的量测模型$p\left( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}}, {\mathit{\boldsymbol{x}}_{k-1}}, {\mathit{\boldsymbol{y}}_{k-1}} \right)$.根据目标的物理特性, 假设目标的存活概率仅与目标的动力学状态有关, 记为${{p}_{s, k}}\left( {\mathit{\boldsymbol{x}}_{k}} \right)$.
k时刻传感器的量测集合记为${{Z}_{k}}\!=\!\left\{ \mathit{\boldsymbol{z}}_{k}^{\left( i \right)} \right\}_{i=1}^{{{N}_{k}}}$, ${{N}_{k}}$表示量测的个数. ${{Z}_{k}}$由源于目标的量测和杂波量测构成, 两者不可区分.根据传感器的物理特性, 假设传感器的检测概率仅与目标的动力学状态有关, 记为${{p}_{d, k}}\left( {\mathit{\boldsymbol{x}}_{k}} \right)$.
在满足如下假设条件下:
1) ${\varepsilon}$为马尔科夫过程, 目标之间相互独立;
2) 新生目标为多伯努利随机有限集, 与存活目标相互独立;
3) 杂波量测与目标产生的量测相互独立, 杂波数服从泊松分布.
PMM-CBMeMBer滤波器的递推过程如下:
步骤1.预测步
假设$k-1$时刻后验多目标密度为多伯努利形式:
\begin{equation}\label{} {{\pi }_{k-1}}=\left\{ \left( r_{k-1}^{\left( i \right)}, p_{k-1}^{\left( i \right)} \right) \right\}_{i=1}^{{{M}_{k-1}}} \end{equation}
(13) $r_{k-1}^{\left( i \right)}\in \left[0, 1 \right]$, 表示$k-1$时刻第i个目标的存在概率, $p_{k-1}^{\left( i \right)}\left( {\mathit{\boldsymbol{\varepsilon }}_{i}} \right)$表示${\mathit{\boldsymbol{\varepsilon }}_{i}}$的概率密度, ${{M}_{k-1}}$表示$k-1$时刻可能出现的最大目标数.则预测多目标密度也为多伯努利形式:
\begin{equation}\label{} {{\pi }_{k|k-1}}\!\!=\!\!\left\{ \!\left( \!r_{P, k|k-1}^{\left( i \right)}, p_{P, k|k-1}^{\left( i \right)} \!\right) \!\right\}_{i=1}^{{{M}_{k-1}}}\!\!\bigcup\! \left\{ \!\left( \!r_{\Gamma, k}^{\left( i \right)}, p_{\Gamma, k}^{\left( i \right)} \!\right) \!\right\}_{i=1}^{{{M}_{\Gamma, k}}} \end{equation}
(14) 前一项表示存活目标的密度, 后一项表示k时刻新生目标的密度.
\begin{equation}\label{} r_{P, k|k-1}^{\left( i \right)}=r_{k-1}^{\left( i \right)}\left\langle p_{k-1}^{\left( i \right)}, {{p}_{s, k}} \right\rangle \end{equation}
(15) \begin{equation}\label{} p_{P, k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right)=\frac{\left\langle {{p}_{k|k-1}}\left( \mathit{\boldsymbol{\varepsilon }} |\cdot \right), p_{k-1}^{\left( i \right)}{{p}_{s, k}} \right\rangle }{\left\langle p_{k-1}^{\left( i \right)}, {{p}_{s, k}} \right\rangle } \end{equation}
(16) $\left\langle \cdot, \cdot \right\rangle $表示内积运算, 如$\left\langle \alpha, \beta \right\rangle =\int{\alpha \left( x \right)\beta \left( x \right){\rm d}x}$.
步骤2.更新步
假设k时刻预测多目标密度为多伯努利形式
\begin{equation}\label{} {{\pi }_{k|k-1}}=\left\{ \left( r_{k|k-1}^{\left( i \right)}, p_{k|k-1}^{\left( i \right)} \right) \right\}_{i=1}^{{{M}_{k|k-1}}} \end{equation}
(17) 则后验多目标密度可由如下多伯努利形式近似
\begin{equation}\label{} {{\pi }_{k}}\!\approx \!\left\{ \!\left( r_{L, k}^{\left( i \right)}, p_{L, k}^{\left( i \right)} \right) \!\right\}_{i=1}^{{{M}_{k|k-1}}}\!\!\bigcup\! {{\left\{ \!\left( {{r}_{U, k}}\left( \mathit{\boldsymbol{z}} \right)\!, {{p}_{U, k}}\!\left( \cdot ;\mathit{\boldsymbol{z}} \right)\! \right) \!\right\}}_{\mathit{\boldsymbol{z}}\in {{Z}_{k}}}} \end{equation}
(18) 前一项表示漏检部分的多目标密度, 后一项表示量测更新部分的多目标密度.
\begin{equation}\label{} r_{L, k}^{\left( i \right)}=r_{k|k-1}^{\left( i \right)}\frac{1-\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle }{1-r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle } \end{equation}
(19) \begin{equation}\label{} p_{L, k}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right)=p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right)\frac{1-{{p}_{d, k}}\left( \mathit{\boldsymbol{x}} \right)}{1-\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle } \end{equation}
(20) \begin{equation}\label{} {{r}_{U, k}}\left( \mathit{\boldsymbol{z}} \right)\!=\!\frac{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\left( 1-r_{k|k-1}^{\left( i \right)} \right)\left\langle p_{k|k-1}^{\left( i \right)}, {{\psi }_{k, \mathit{\boldsymbol{z}}}} \right\rangle }{{{\left( 1-r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle \right)}^{2}}}}}{{{\kappa }_{k}}\left( \mathit{\boldsymbol{z}} \right)\!+\!\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{\psi }_{k, \mathit{\boldsymbol{z}}}} \right\rangle }{1-r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle }}} \end{equation}
(21) \begin{equation}\label{} {{p}_{U, k}}\left( \mathit{\boldsymbol{\varepsilon }} ;\mathit{\boldsymbol{z}} \right)\!=\!\frac{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}}{1-r_{k|k-1}^{\left( i \right)}}p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right){{\psi }_{k, \mathit{\boldsymbol{z}}}}\left( \mathit{\boldsymbol{\varepsilon }} \right)}}{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}}{1-r_{k|k-1}^{\left( i \right)}}\left\langle p_{k|k-1}^{\left( i \right)}{{\psi }_{k, \mathit{\boldsymbol{z}}}} \right\rangle }} \end{equation}
(22) ${{\psi }_{k, \mathit{\boldsymbol{z}}}}\left( \mathit{\boldsymbol{\varepsilon }} \right)={{p}_{d, k}}\left( \mathit{\boldsymbol{x}} \right){g_k}\left( {\mathit{\boldsymbol{z}}|\mathit{\boldsymbol{x}}} \right)$
${{\kappa }_{k}}\left( \cdot \right)$表示k时刻杂波的强度, ${g_k}\left( {\mathit{\boldsymbol{z}}|\mathit{\boldsymbol{x}}} \right)$表示目标$\mathit{\boldsymbol{x}}$的似然函数.
在上述递推过程中, 若状态转移函数${{p}_{k|k-1}}$满足式(9), 并且新生目标模型满足:
\begin{equation}\label{} {{\gamma }_{\Gamma, k}}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)={{g}_{k}}\left( \mathit{\boldsymbol{y}}|\mathit{\boldsymbol{x}} \right){{\tilde{\gamma }}_{\Gamma, k}}\left( \mathit{\boldsymbol{x}} \right) \end{equation}
(23) ${{\tilde{\gamma }}_{\Gamma, k}}\left( \mathit{\boldsymbol{x}} \right)$表示仅与目标动力学状态相关的新生目标密度函数.此时, PMM-CBMeMBer滤波算法就退化为HMM-CBMeMBer滤波算法.
2.2 PMM-CBMeMBer滤波器的GM实现
下面给出PMM-CBMeMBer滤波器在线性高斯条件下的GM实现.
在新生目标模型中, 若$p_{\Gamma, k}^{\left( i \right)}$为GM形式:
\begin{equation}\label{} p_{\Gamma, k}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\!\sum\limits_{j=1}^{J_{\Gamma, k}^{\left( i \right)}}{\omega _{\Gamma, k}^{\left( i, j \right)}N\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{\Gamma, k}^{\left( i, j \right)}, P_{\Gamma, k}^{\left( i, j \right)} \right)} \end{equation}
(24) 其中, $J_{\Gamma, k}^{\left( i \right)}$表示第i个目标对应的高斯项个数, $\omega _{\Gamma , k}^{\left( i, j \right)}$、$\mathit{\boldsymbol{m}}_{\Gamma, k}^{\left( i, j \right)}$和$P_{\Gamma, k}^{\left( i, j \right)}$分别表示第i个目标中第j个高斯项的权重、均值和协方差.则GM-PMM-CBMeMBer滤波器的递推过程如下:
步骤1.预测步
假设$k-1$时刻后验多目标密度
\begin{equation}\label{} {{\pi }_{k-1}}\!=\!\left\{\! \left( r_{k-1}^{1, \left( i \right)}, p_{k-1}^{1, \left( i \right)} \right)\! \right\}_{i=1}^{M_{k-1}^{1}}\!\bigcup\! \left\{\! \left( r_{k-1}^{2, \left( i \right)}, p_{k-1}^{2, \left( i \right)} \right)\! \right\}_{i=1}^{M_{k-1}^{2}} \end{equation}
(25) 已知, $p_{k-1}^{\ell, \left( i \right)}$, $\ell =\left\{ 1, 2 \right\}$, 为如下GM形式,
\begin{equation}\label{} p_{k-1}^{1, \left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)=\sum\limits_{j=1}^{J_{k-1}^{1, \left( i \right)}}{\omega _{k-1}^{1, \left( i, j \right)}{\rm N}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{k-1}^{1, \left( i, j \right)}, P_{k-1}^{1, \left( i, j \right)} \right)} \end{equation}
(26) \begin{equation}\label{} p_{k-1}^{2, \left( i \right)}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\!\!\sum\limits_{j=1}^{J_{k-1}^{2, \left( i \right)}}\!{\omega _{k-1}^{2, \left( i, j \right)}\!{\rm N}\!\!\left( \!\mathit{\boldsymbol{x}};\mathit{\boldsymbol{m}}_{k-1}^{2, \left( i, j \right)}\!, P_{k-1}^{2, \left( i, j \right)} \!\right)\!{{\delta }_{{{\mathit{\boldsymbol{z}}}^{\left( i \right)}}}}\!\left( \mathit{\boldsymbol{y}} \right)} \end{equation}
(27) ${{\delta }_{{{\mathit{\boldsymbol{z}}}^{\left( i \right)}}}}\!\left( \mathit{\boldsymbol{y}} \right)$为Dirac delta函数[2], ${{\mathit{\boldsymbol{z}}}^{\left( i \right)}}\in {{Z}_{k-1}}$, ${\mathit{\boldsymbol{y}}}$表示状态为${\mathit{\boldsymbol{x}}}$对应的量测.若${{\mathit{\boldsymbol{z}}}^{\left( i \right)}}=\mathit{\boldsymbol{y}}$, 说明${{\mathit{\boldsymbol{z}}}^{\left( i \right)}}$是由$\mathit{\boldsymbol{x}}$产生的量测; 否则, $\mathit{\boldsymbol{z}}^{\left( i \right)}$不是由${\mathit{\boldsymbol{x}}}$产生的量测.则预测多目标密度
\begin{align} {\pi _{k|k - 1}} \!=&\! \left\{ {\!\left( {r_{P, k|k - 1}^{1, \left( i \right)}, p_{P, k|k - 1}^{1, \left( i \right)}} \right)} \!\right\}_{i = 1}^{M_{k - 1}^1} \cup \nonumber\\ &\left\{ {\!\left( {r_{P, k|k - 1}^{2, \left( i \right)}, p_{P, k|k - 1}^{2, \left( i \right)}} \right)} \!\right\}_{i = 1}^{M_{k - 1}^2} \!\cup\!\nonumber\\ &\left\{ {\!\left( {r_{\Gamma, k}^{\left( i \right)}, p_{\Gamma, k}^{\left( i \right)}} \right)} \!\right\}_{i = 1}^{{M_{\Gamma, k}}} \end{align}
(28) 可由如下公式得到:
\begin{align} &r_{P, k|k-1}^{\ell, \left( i \right)}={{p}_{s, k}}r_{k-1}^{\ell , \left( i \right)}, \quad \ell =\left\{ 1, 2 \right\} \end{align}
(29) \begin{align} &p_{P, k|k-1}^{1, \left( i \right)}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\nonumber\\ &\qquad\sum\limits_{j=1}^{J_{k-1}^{1, \left( i \right)}}\!\!{\omega _{k-1}^{1, \left( i, j \right)}\!{\rm N}\!\!\left(\! \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{P, k|k-1}^{1, \left( i, j \right)}, P_{P, k|k-1}^{1, \left( i, j \right)} \!\right)}\end{align}
(30) \begin{align} &p_{P, k|k-1}^{2, \left( i \right)}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\nonumber\\ &\qquad\sum\limits_{j=1}^{J_{k-1}^{2, \left( i \right)}}\!\!{\omega _{k-1}^{2, \left( i, j \right)}\!{\rm N}\!\!\left( \!\mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{P, k|k-1}^{2, \left( i, j \right)}, P_{P, k|k-1}^{2, \left( i, j \right)} \!\right)} \end{align}
(31) 其中
\begin{equation}\label{} \mathit{\boldsymbol{m}}_{P, k|k-1}^{1, \left( i, j \right)}\!=\!{{B}_{k}}\mathit{\boldsymbol{m}}_{k-1}^{1, \left( i, j \right)}, \mathit{\boldsymbol{m}}_{P, k|k-1}^{2, \left( i, j \right)}\!=\!{{B}_{k}}\!\left[\begin{matrix} \mathit{\boldsymbol{m}}_{k-1}^{2, \left( i, j \right)} \\ {{\mathit{\boldsymbol{z}}}^{\left( i \right)}} \\ \end{matrix} \right] \end{equation}
(32) \begin{equation}\label{} P_{P, k|k-1}^{1, \left( i, j \right)}={{\Sigma }_{k}}+{{B}_{k}}P_{k-1}^{1, \left( i, j \right)}B_{k}^{\rm{T}} \end{equation}
(33) \begin{equation}\label{} P_{P, k|k-1}^{2, \left( i, j \right)}={{\Sigma }_{k}}+\left[\begin{matrix} F_{k}^{1} \\ H_{k}^{1} \\ \end{matrix} \right]P_{k-1}^{2, \left( i, j \right)}\left[\begin{matrix} {{\left( F_{k}^{1} \right)}^{\rm{T}}}&{{\left( H_{k}^{1} \right)}^{\rm{T}}} \\ \end{matrix} \right] \end{equation}
(34) 新生目标模型已知, $p_{\Gamma, k}^{\left( i \right)}$见式(24).
步骤2.更新步
在式(28)中, 由于组成预测多目标密度的三个部分形式相同, 令${{M}_{k|k-1}}=M_{k-1}^{1}+M_{k-1}^{2}+{{M}_{\Gamma, k}}$, 它们可以重写为
\begin{equation}\label{} {{\pi }_{k|k-1}}=\left\{ \left( r_{k|k-1}^{\left( i \right)}, p_{k|k-1}^{\left( i \right)} \right) \right\}_{i=1}^{{{M}_{k|k-1}}} \end{equation}
(35) \begin{equation}\label{} p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\!\sum\limits_{j=1}^{J_{k|k-1}^{\left( i \right)}}\!{\omega _{k|k-1}^{\left( i, j \right)}{\rm N}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{k|k-1}^{\left( i, j \right)}, P_{k|k-1}^{\left( i, j \right)} \right)} \end{equation}
(36) \begin{equation}\label{} \mathit{\boldsymbol{m}}_{k|k-1}^{\left( i, j \right)}\!=\!\left[\begin{matrix} \mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)} \\ \mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \\ \end{matrix} \right]\!, P_{k|k-1}^{\left( i, j \right)}\!=\!\left[\begin{matrix} P_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)} \!&\! P_{k|k-1}^{\mathit{\boldsymbol{xy}}, \left( i, j \right)} \\ P_{k|k-1}^{\mathit{\boldsymbol{yx}}, \left( i, j \right)} \!&\! P_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \\ \end{matrix} \right] \end{equation}
(37) 则更新多目标密度
\begin{align} {{\pi }_{k}}\!=&\!\left\{ \!\left( r_{L, k}^{\left( i \right)}, p_{L, k}^{\left( i \right)} \right) \!\right\}_{i=1}^{{{M}_{k|k-1}}}\!\bigcup\!\nonumber\\&{{\left\{ \!\left( {{r}_{U, k}}\!\left( \mathit{\boldsymbol{z}} \right)\!, {{p}_{U, k}}\!\left( \cdot ;\mathit{\boldsymbol{z}} \right) \right) \!\right\}}_{\mathit{\boldsymbol{z}}\in {{Z}_{k}}}} \end{align}
(38) 可由如下公式得到:
\begin{equation}\label{} r_{L, k}^{\left( i \right)}=r_{k|k-1}^{\left( i \right)}\frac{1-{{p}_{d, k}}}{1-r_{k|k-1}^{\left( i \right)}{{p}_{d, k}}} \end{equation}
(39) \begin{equation}\label{} p_{L, k}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)=p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right) \end{equation}
(40) \begin{equation}\label{} {{r}_{U, k}}\left( \mathit{\boldsymbol{z}} \right)=\frac{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\left( 1-r_{k|k-1}^{\left( i \right)} \right)\rho _{U, k}^{\left( i \right)}\left( \mathit{\boldsymbol{z}} \right)}{{{\left( 1-r_{k|k-1}^{\left( i \right)}{{p}_{d, k}} \right)}^{2}}}}}{{{\kappa }_{k}}\left( \mathit{\boldsymbol{z}} \right)+\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\rho _{U, k}^{\left( i \right)}\left( \mathit{\boldsymbol{z}} \right)}{1-r_{k|k-1}^{\left( i \right)}{{p}_{d, k}}}}} \end{equation}
(41) \begin{equation}\label{} {p_{U, k}}\!\left( \!{\mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{z}}} \!\right)\! =\! \frac{{\sum\limits_{i = 1}^{{M_{k|k - 1}}}\! {\sum\limits_{j = 1}^{J_{k|k - 1}^{\left( i \right)}} \!\!{\omega _{U, k}^{\left( {i, j} \right)}\!\!\left( \mathit{\boldsymbol{z}} \right)\!{\rm N}\!\!\left( \! {\mathit{\boldsymbol{x}};\mathit{\boldsymbol{m}}_{U, k}^{\left( {i, j} \right)}\!, P_{U, k}^{\left( {i, j} \right)}} \!\right)} } }}{{\sum\limits_{i = 1}^{{M_{k|k - 1}}} {\sum\limits_{j = 1}^{J_{k|k - 1}^{\left( i \right)}} {\omega _{U, k}^{\left( {i, j} \right)}\left( \mathit{\boldsymbol{z}} \right)} } }} \end{equation}
(42) 其中
\begin{equation}\label{} \rho _{U, k}^{\left( i \right)}\left( \mathit{\boldsymbol{z}} \right)={{p}_{d, k}}\sum\limits_{j=1}^{J_{k|k-1}^{\left( i \right)}}{\omega _{k|k-1}^{\left( i, j \right)}q_{k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)} \end{equation}
(43) \begin{equation}\label{} q_{k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)={\rm N}\left( \mathit{\boldsymbol{z}};\mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)}, P_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \right) \end{equation}
(44) \begin{equation}\label{} \omega _{U, k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)=\frac{r_{k|k-1}^{\left( i \right)}}{1-r_{k|k-1}^{\left( i \right)}}{{p}_{d, k}}\omega _{k|k-1}^{\left( i, j \right)}q_{k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right) \end{equation}
(45) \begin{equation}\label{} \mathit{\boldsymbol{m}}_{U, k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)=\mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)}+K_{U, k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}}-\mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \right) \end{equation}
(46) \begin{equation}\label{} P_{U, k}^{\left( i, j \right)}=P_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)}-K_{U, k}^{\left( i, j \right)}{{\left( P_{k|k-1}^{\mathit{\boldsymbol{xy}}, \left( i, j \right)} \right)}^{\rm{T}}} \end{equation}
(47) \begin{equation}\label{} K_{U, k}^{\left( i, j \right)}=P_{k|k-1}^{\mathit{\boldsymbol{xy}}, \left( i, j \right)}{{\left( P_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \right)}^{-1}} \end{equation}
(48) 在更新步中, 漏检部分的状态包括动力学状态和相应的量测, 协方差也是动力学状态和量测整体的协方差; 量测更新部分给出了动力学状态的求解, 式(46)中的$\mathit{\boldsymbol{z}}$表示该动力学状态对应的量测, 式(47)为目标动力学状态的协方差, 不包括量测以及量测与动力学状态的协方差.即算法中漏检部分和量测更新部分对应的多目标密度的表示形式不同, 故在$k-1$时刻将多目标密度假设为相应的两部分.
根据GM-HMM-PHD滤波器得到的后验多目标强度的高斯项个数[5], 不难得到在不考虑衍生目标的情况下GM-HMM-CBMeMBer滤波器的后验多目标密度的高斯项个数为$\left(\! \sum\nolimits_{i=1}^{{{M}_{k-1}}}\!\!{J_{k-1}^{\left( i \right)}}\!+\!\sum\nolimits_{i=1}^{{{M}_{\Gamma, k}}}\!\!{J_{\Gamma , k}^{\left( i \right)}} \!\right)\!\left( \!1\!+\!\left| {{Z}_{k}} \right|\! \right)$, GM-PMM-CBMeMBer滤波器的后验多目标密度的高斯项个数为$\left( \! \sum\nolimits_{i=1}^{M_{k-1}^{1}}\!\!{J_{k-1}^{1, \left( i \right)}}\!+\!\sum\nolimits_{i=1}^{M_{k-1}^{2}}\!\!{J_{k-1}^{2, \left( i \right)}}\!+\!\sum\nolimits_{i=1}^{{{M}_{\Gamma , k}}}\!\!{J_{\Gamma, k}^{\left( i \right)}} \!\right)\!$ $(\! 1\!+\!| {{Z}_{k}} | \!)$.在相同场景下, GM-PMM-CBMeMBer滤波器和GM-HMM-CBMeMBer滤波器的计算复杂度为同一数量级.但由于GM-PMM-CBMeMBer滤波器状态维数的增加, 计算量会相应增大.
由于新生目标的出现和更新步中假设轨迹的平均化, 航迹个数和每条航迹对应的高斯项会逐渐增加, 需要采用剪切和合并技术[5]进行处理: 1)剪切.一是航迹的剪切, 去掉存在概率小于阈值为${{T}_{r}}$的航迹; 二是航迹对应的高斯项的剪切, 去掉权值小于阈值为${{T}_{\omega }}$的高斯项. 2)合并.在每条航迹中, 将距离小于阈值为U的高斯项进行合并.由于在后验多目标密度中漏检部分和量测更新部分对应的高斯项的形式不同, 在合并过程中需要加以区分.同时, 设定航迹数的最大值为${{M}_{\max }}$, 每条航迹对应的高斯项个数的最大值为${{J}_{\max }}$.最后, 对目标的状态进行提取.若航迹的存在概率大于给定阈值(如0.5), 则认为它是一个目标, 选择它对应的权值最大的高斯项作为目标的状态.
3. 仿真
3.1 一种满足HMM局部物理特性的PMM
文献[21]总结了过程噪声与量测噪声相关和量测噪声为有色噪声对应的PMM, 并提出一种满足HMM局部物理特性的PMM.为了与HMM框架下的CBMeMBer滤波器的性能进行比较, 本文采用上述满足HMM局部物理特性的PMM进行仿真实验.并将本文所提算法的跟踪性能与PHD滤波器[21]进行比较.下面首先给出该PMM的描述.
假设线性高斯HMM为
\begin{equation}\label{} p\left( {\mathit{\boldsymbol{x}}_{0}} \right)={\rm N}\left( {\mathit{\boldsymbol{x}}_{0}};{\mathit{\boldsymbol{m}}_{0}}, {{P}_{0}} \right) \end{equation}
(49) \begin{equation}\label{} {{f}_{k|k-1}}\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}} \right)={\rm N}\left( {\mathit{\boldsymbol{x}}_{k}};{{F}_{k}}{\mathit{\boldsymbol{x}}_{k-1}}, {{Q}_{k}} \right) \end{equation}
(50) \begin{equation}\label{} {{g}_{k}}\left( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}} \right)={\rm N}\left( {\mathit{\boldsymbol{y}}_{k}};{{H}_{k}}{\mathit{\boldsymbol{x}}_{k}}, {{R}_{k}} \right) \end{equation}
(51) 则满足$p\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}} \right)={{f}_{k|k-1}}\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}} \right)$, $p( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}})={{g}_{k}}\left( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}} \right)$, 且${{p}_{k|k-1}}=\left( {\mathit{\boldsymbol{x}}_{k}}, {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}}, {\mathit{\boldsymbol{y}}_{k-1}} \right)$不依赖于参数$\left( {\mathit{\boldsymbol{m}}_{0}}, {{P}_{0}} \right)$的线性高斯PMM为
\begin{equation}\label{} p\left( {\mathit{\boldsymbol{\varepsilon }}_{0}} \right)\!=\!{\rm N}\left( {\mathit{\boldsymbol{\varepsilon }}_{0}};\left[\begin{matrix} {\mathit{\boldsymbol{m}}_{0}} \\ {{H}_{0}}{\mathit{\boldsymbol{m}}_{0}} \\ \end{matrix} \right]\!, \left[\begin{matrix} {{P}_{0}} \!&\! {{\left( {{H}_{0}}{{P}_{0}} \right)}^{\rm{T}}} \\ {{H}_{0}}{{P}_{0}}\! &\! {{R}_{0}}\!+\!{{H}_{0}}{{P}_{0}}H_{0}^{\rm{T}} \\ \end{matrix} \right] \right) \end{equation}
(52) \begin{equation}\label{} {{p}_{k|k-1}}\left( {\mathit{\boldsymbol{\varepsilon }}_{k}}|{\mathit{\boldsymbol{\varepsilon }}_{k-1}} \right)={\rm N}\left( {\mathit{\boldsymbol{\varepsilon }}_{k}};{{B}_{k}}{\mathit{\boldsymbol{\varepsilon }}_{k-1}}, {{\Sigma }_{k}} \right) \end{equation}
(53) 其中
\begin{equation}\label{} {{B}_{k}}=\left[\begin{matrix} {{F}_{k}}-F_{k}^{2}{{H}_{k-1}}&F_{k}^{2} \\ {{H}_{k}}{{F}_{k}}-H_{k}^{2}{{H}_{k-1}}&H_{k}^{2} \\ \end{matrix} \right] \end{equation}
(54) \begin{equation}\label{} {{\Sigma }_{k}}=\left[\begin{matrix} \Sigma _{k}^{11}&\Sigma _{k}^{12} \\ \Sigma _{k}^{21}&\Sigma _{k}^{22} \\ \end{matrix} \right] \end{equation}
(55) \begin{equation}\label{} \Sigma _{k}^{11}={{Q}_{k}}-F_{k}^{2}{{R}_{k-1}}{{\left( F_{k}^{2} \right)}^{\rm{T}}} \end{equation}
(56) \begin{equation}\label{} \Sigma _{k}^{21}={{\left( \Sigma _{k}^{12} \right)}^{\rm{T}}}={{H}_{k}}{{Q}_{k}}-H_{k}^{2}{{R}_{k-1}}{{\left( F_{k}^{2} \right)}^{\rm{T}}} \end{equation}
(57) \begin{equation}\label{} \Sigma _{k}^{22}={{R}_{k}}-H_{k}^{2}{{R}_{k-1}}{{\left( H_{k}^{2} \right)}^{\rm{T}}}+{{H}_{k}}{{Q}_{k}}H_{k}^{\rm{T}} \end{equation}
(58) 在满足${{\Sigma }_{k}}$为正定矩阵的情况下, $F_{k}^{2}$和$H_{k}^{2}$可以任意选取.
3.2 仿真分析
为了与PHD滤波器的跟踪性能进行比较, 依据文献[21]对上述PMM的参数进行设置.
\begin{equation}\label{} {{F}_{k}}=\left[\begin{matrix} 1&t&0&0 \\ 0&1&0&0 \\ 0&0&1&t \\ 0&0&0&1 \\ \end{matrix} \right], \quad {{H}_{k}}=\left[\begin{matrix} 1&0&0&0 \\ 0&0&1&0 \\ \end{matrix} \right] \end{equation}
(59) \begin{equation}\label{} {{Q}_{k}}=\left[\begin{matrix} 100&1&0&0 \\ 1&10&0&0 \\ 0&0&100&1 \\ 0&0&1&10 \\ \end{matrix} \right], \quad {{R}_{k}}=\left[\begin{matrix} {{10}^{2}}&0 \\ 0&{{10}^{2}} \\ \end{matrix} \right] \end{equation}
(60) \begin{equation}\label{} F_{k}^{2}=\left[\begin{matrix} a&0 \\ 0&0 \\ 0&b \\ 0&0 \\ \end{matrix} \right], \quad H_{k}^{2}=\left[\begin{matrix} c&0 \\ 0&d \\ \end{matrix} \right] \end{equation}
(61) 令$t=1$, $a=b=0.7$, $c=d=0.1$.仿真硬件环境为Matlab R2013b, Windows 10 64bit, Intel Core i5-4570 CPU 3.20GHz, RAM 4.00GB.
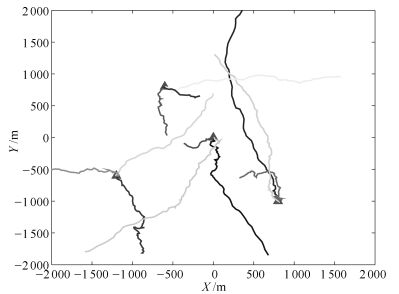
监控区域内有12个目标:目标1、2和3在$k=1$时出现, 4、5和6在$k=20$时出现, 7和8在$k=40$时出现, 9和10在$k=60$时出现, 11和12在$k=80$时出现, 而目标1和2在$k=70$时消失, 其他目标不消失.目标的状态为${\mathit{\boldsymbol{x}}_{k}}={{\left[ {{x}_{k}}, {{{\dot{x}}}_{k}}, {{y}_{k}}, {{{\dot{y}}}_{k}} \right]}^{\rm{T}}}$, ${{x}_{k}}$和${{y}_{k}}$表示二维笛卡尔坐标系下目标的位置, ${{\dot{x}}_{k}}$和${{\dot{y}}_{k}}$分别表示对应方向的速度.在监控区域$V=\left[-2000, ~2000 \right]\rm{m}\times \left[ -2000, ~2000 \right]m$中, 各采样时刻的杂波个数服从均值为20的泊松分布, 杂波量测在监控区域内均匀分布. 图 1是基于上述线性高斯PMM的目标运动轨迹, 红色三角形表示目标的初始位置.
CBMeMBer滤波器中新生目标的模型参数${{\pi }_{\Gamma }}\!\!=\!\!\left\{ \left( {{r}_{\Gamma }}, p_{\Gamma }^{\left( i \right)} \right) \right\}_{i=1}^{4}$设置如下:在HMM中, ${{r}_{\Gamma }}\!\!=\!\!0.01$, $p_{\Gamma }^{\left( i \right)}\left( x \right) \!\!=\!\!{\rm N}\left( \mathit{\boldsymbol{x}};\mathit{\boldsymbol{m}}_{\Gamma }^{\left( i \right)}, {{P}_{\Gamma }} \right)$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 1 \right)}\!\!=\!\!{{\left[0, 0, 0, 0 \right]}^{\rm{T}}}$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 2 \right)}\!\!=\!\!{{\left[400, 0, -600, 0 \right]}^{\rm{T}}}$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 3 \right)}\!\!=\!\!{{\left[-800, 0, -200, 0 \right]}^{\rm{T}}}$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 4 \right)}\!\!=\!\!{{\left[-200, 0, 800, 0 \right]}^{\rm{T}}}$, ${{P}_{\Gamma }}\!\!=\!\!\rm{diag}\left\{\!1000, 400, 1000, 400 \right\}$; 在PMM中, ${{r}_{\Gamma }}=0.01$,
$p_\Gamma ^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right) = {\rm{N}}\left( {\mathit{\boldsymbol{\varepsilon }};\left[ {\begin{array}{*{20}{c}} {\mathit{\boldsymbol{m}}_\Gamma ^{\left( i \right)}}\\ {{H_k}\mathit{\boldsymbol{m}}_\Gamma ^{\left( i \right)}} \end{array}} \right],\left[ {\begin{array}{*{20}{c}} {{P_\Gamma }}&{{{\left( {{H_k}{P_\Gamma }} \right)}^{\rm{T}}}}\\ {{H_k}{P_\Gamma }}&{{R_k} + {H_k}{P_\Gamma }H_k^{\rm{T}}} \end{array}} \right]} \right)$
$i=\left\{ 1, \cdots, 4 \right\}$.目标的存活概率为${{p}_{s, k}}=0.98$, 传感器的检测概率为${{p}_{d, k}}=0.9$.在剪切和合并过程中, 设航迹存在概率的阈值为${{T}_{r}}={{10}^{-3}}$, 高斯项权值的阈值为${{T}_{\omega }}={{10}^{-5}}$, 合并阈值为$U=4\rm{m}$, 航迹的最大值为${{M}_{\max }}=100$, 每条航迹对应高斯项个数的最大值为${{J}_{\max }}=30$. PHD滤波器新生目标的模型参数见文献[21].
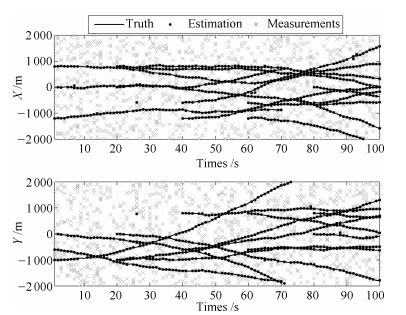
图 2给出了GM-PMM-CBMeMBer滤波器单次仿真的结果, 两个子图分别对应不同时刻X轴和Y轴的状态估计.整体来看, 所提算法可以比较准确地估计目标的状态.在某些时刻会出现虚假目标或目标跟踪丢失的情况, 但随着时间推移, 算法自身可以很快地进行修正.
本文采用OSPA (Optimal subpattern assignment)距离[24]评估算法的跟踪性能.设多目标真实状态的集合为$X=\left\{ {\mathit{\boldsymbol{x}}_{1}}, \cdots , {\mathit{\boldsymbol{x}}_{m}} \right\}$, 估计状态的集合为$\hat{X}=\left\{ {{{\hat{\mathit{\boldsymbol{x}}}}}_{1}}, \cdots, {{{\hat{\mathit{\boldsymbol{x}}}}}_{n}} \right\}$, 若$m\le n$, 则OSPA距离为
\begin{equation}\label{} \begin{array}{l} \bar d_p^{\left( c \right)}\left( {X, \hat X} \right) = \\ \quad {\left( {\frac{1}{n}\left( {\mathop {\min }\limits_{\pi \in {\Pi _n}} \sum\limits_{i = 1}^m {{d^{\left( c \right)}}{{\left( {{\mathit{\boldsymbol{x}}_i}, {{\hat {\mathit{\boldsymbol{x}}}}_{\pi \left( i \right)}}} \right)}^p} + {c^p}\left( {n - m} \right)} } \right)} \right)^{\frac{1}{p}}} \end{array} \end{equation}
(62) 其中, ${{d}^{\left( c \right)}}\left( {\mathit{\boldsymbol{x}}_{i}}, {{{\hat{\mathit{\boldsymbol{x}}}}}_{\pi \left( i \right)}} \right)=\min \left( c, \left\| \mathit{\boldsymbol{x}}-\hat{\mathit{\boldsymbol{x}}} \right\| \right)$, ${{\Pi }_{n}}$表示$\left\{ 1, \cdots, n \right\}$的所有排列集合.若$m>n$, 则$\bar d_p^{\left( c \right)}\left( {X, \hat X} \right) = \bar d_p^{\left( c \right)}\left( {\hat X, X} \right)$.令距离阶次$p=1$, 截断系数$c=20\rm {m}$.
本例做了500次蒙特卡洛(Monte carlo, MC)仿真实验, 分析结果如下:
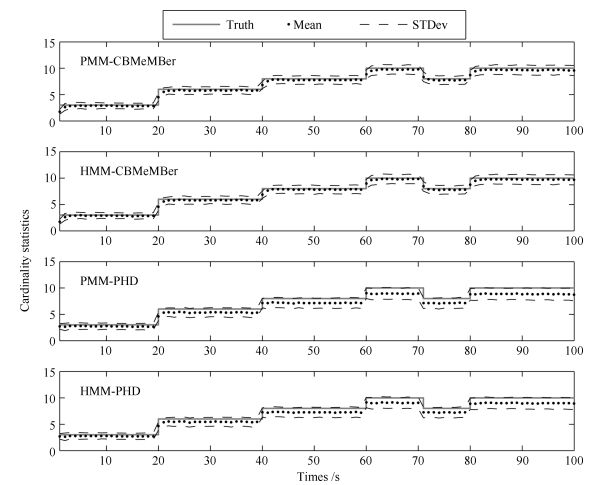
1) 图 3为不同算法对目标数估计的均值和标准差.可以看出, 在PMM或HMM框架下, CBMeMBer滤波器对目标数的估计是无偏的, PHD滤波器随着目标数的增加, 会出现欠估计的情况.说明本文所提算法对目标数的估计优于PHD滤波器[21].相比不同框架下的CBMeMBer滤波器和PHD滤波器, 它们对目标数估计的统计特性非常接近.
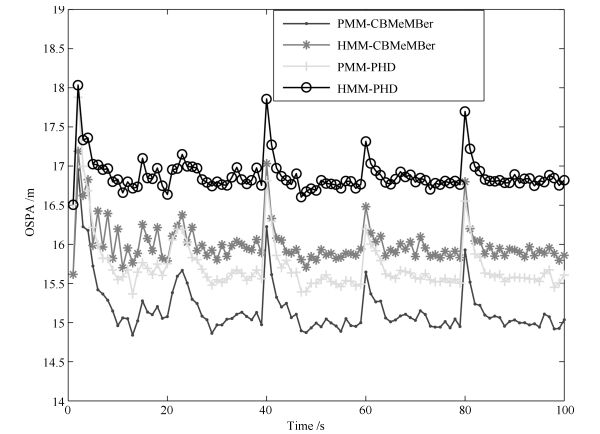
2) 图 4为不同算法对应的OSPA距离.可以看出, CBMeMBer滤波器在PMM和HMM框架下的OSPA距离评价指标均优于PHD滤波器. CBMeMBer滤波器和PHD滤波器在PMM框架下的OSPA距离评价指标优于HMM框架下相应的OSPA距离评价指标.
3) 表 1为不同杂波环境下4种算法的性能比较.不同杂波环境下, CBMeMBer滤波器和PHD滤波器在PMM框架下的OSPA距离评价指标优于HMM框架下的OSPA距离评价指标, 但单步运行时间的均值会变大.由于GM-CBMeMBer滤波器是将每个目标的密度分别用GM表示, 而GM-PHD滤波器是将多目标密度的强度整体用GM表示.因此, 它们的高斯项个数不同, 比较运行时间也就没有意义.但从表 1可以看出, 相比GM-PMM-PHD滤波器, GM-PMM-CBMeMBer滤波器以更小的时间代价可以得到更优的OSPA距离评价指标.
表 1 不同杂波环境下的性能比较Table 1 Tracking performance verses clutter's number$\lambda $ 0 5 10 20 PMM-CBMeMBer OSPA(m) 15.173 15.196 15.202 15.390 时间(s) 0.0203 0.0221 0.0237 0.0244 HMM-CBMeMBer OSPA(m) 16.010 16.065 16.086 16.234 时间(s) 0.0179 0.0194 0.0211 0.0228 PMM-PHD OSPA(m) 15.631 15.654 15.698 15.739 时间(s) 0.0203 0.0280 0.0350 0.0476 HMM-PHD OSPA(m) 16.806 16.817 16.855 16.889 时间(s) 0.0084 0.0118 0.0132 0.0191 4. 结论
本文提出一种在PMM框架下的CBMeMBer滤波器, 并给出了它在线性高斯PMM条件下的GM实现.该算法放宽了HMM隐含的马尔科夫假设和独立性假设限制.在仿真实验中, 采用一种满足HMM局部物理特性的PMM, 将本文所提算法与文献[21]所提的GM-PMM-PHD滤波器进行比较, 仿真结果表明本文所提算法的跟踪性能优于GM-PMM-PHD滤波器.本文考虑的是PMM在线性高斯条件下的多目标跟踪问题, 而非线性条件下的多目标跟踪问题有待进一步研究.
-
表 1 分支-定价算法与CPLEX求解小规模算例的计算结果比较
Table 1 Comparison of computational results obtained by branch-and-price and CPLEX for small scale instances
问题规模 分支-定价 CPLEX 轧批数 时间槽数 LMP OPT GAP (%) CPU (s) LIP UB GAP (%) CPU (s) 20 5 2 479.77 2 483.8 0.16 0.11 2278.50 2 483.8 9.01 1.17 25 6 2 991.97 3 011.7 0.66 0.17 2782.05 3 011.7 8.25 2.76 30 7 3 693.91 3 726.4 0.88 0.43 3501.45 3 726.4 6.42 216.72 35 8 4 026.08 4 047.0 0.52 0.79 3842.80 4 047.0 5.31 501.53 40 10 4 622.63 4 634.8 0.26 1.18 4473.60 4 779.6 6.84 3 600.00  下载: 导出CSV
下载: 导出CSV
表 2 分支-定价算法求解中规模算例的计算结果
Table 2 Computational results of branch-and-price for solving medium scale instances
问题规模 GAP (%) Nodes CPU (s) 轧批数 时间槽数 平均 最大 平均 最大 平均 最大 50 12 1.49 2.91 21 57 2.12 7.15 50 15 1.06 1.50 13 33 1.19 5.73 50 18 0.77 1.02 10 23 0.89 3.25 50 20 1.22 3.27 11 25 0.25 0.98 60 12 0.74 2.47 26 45 12.02 81.53 60 15 1.26 3.24 27 59 8.03 46.81 60 18 1.10 2.65 21 40 4.68 22.55 60 20 1.12 3.81 19 48 3.51 10.06 80 12 1.00 2.57 24 80 196.55 497.12 80 15 0.86 1.91 31 58 119.58 254.81 80 18 1.30 2.74 18 37 40.23 150.28 80 20 0.71 1.72 11 29 10.61 76.11 100 12 0.46 1.86 66 113 233.75 714.88 100 15 0.66 2.50 24 67 185.42 325.91 100 18 0.81 3.13 40 79 100.21 255.13 100 20 1.01 3.05 22 62 51.14 190.11
下载: 导出CSV
表 3 主问题和子问题改进策略的性能分析
Table 3 Performance analysis of improvement strategies for master problem and subproblem
问题规模 M1 (s) M2 (s) M3 (s) M4 (s) 轧批数 时间槽数 平均 最大 平均 最大 平均 最大 平均 最大 50 12 4.69 17.12 3.7 14.29 2.33 7.94 2.12 7.15 50 15 3.65 12.85 2.98 10.93 1.25 7.16 1.19 5.73 50 18 2.04 8.64 1.77 7.57 1.01 4.05 0.89 3.25 50 20 0.87 2.84 0.67 2.03 0.29 1.22 0.25 0.98 60 12 48.25 191.13 36.77 149.03 14.84 100.93 12.02 81.53 60 15 29.45 114.49 24.14 85.5 10.12 60.32 8.03 46.81 60 18 12.47 64.05 10.36 56.81 5.82 28.13 4.68 22.55 60 20 10.82 36.24 8.7 32.5 4.33 11.71 3.51 10.06 80 12 1 086.38 - 969.15 - 217.68 641.45 196.55 497.12 80 15 690 2 063.25 503.93 1 733.78 124.16 315.08 119.58 254.81 80 18 322.21 1 067.64 257.22 938.52 42.79 175.27 40.23 150.28 80 20 86.17 737.05 62.47 610.48 12.48 90.52 10.61 76.11 100 12 3 400.82 - 2 444.17 - 265.16 801.17 233.75 714.88 100 15 2 619.11 - 2 006.37 - 207.73 380.22 185.42 325.91 100 18 1 514.30 - 1 227.72 - 111.29 319.95 100.21 255.13 100 20 702.27 2 960.12 525.75 2 452.29 62.02 223.47 51.14 190.11 注:表中"-"表示算法在2小时内未完成分支搜索过程.
下载: 导出CSV
表 4 分支-定价算法与手工计划的结果比较
Table 4 Comparison results between branch-and-price and the manual planning method
问题规模 目标值 能耗费用 机架切换时间 轧批数 时间槽数 手工排产 分支-定价 手工排产 分支-定价 手工排产 分支-定价 51 12 1.0915 1.0000 1.0886 1.0000 1.3074 1.0000 56 12 1.0864 1.0000 1.0842 1.0000 1.2239 1.0000 55 13 1.0944 1.0000 1.0941 1.0000 1.1181 1.0000 56 13 1.0756 1.0000 1.0744 1.0000 1.1601 1.0000 58 14 1.0947 1.0000 1.0949 1.0000 1.0836 1.0000 平均 1.0885 1.0000 1.0872 1.0000 1.1786 1.0000
下载: 导出CSV
-
[1] Lopez L, Carter M W, Gendreau M. The hot strip mill production scheduling problem:a tabu search approach. European Journal of Operational Research, 1998, 106 (2-3):317-335 doi: 10.1016/S0377-2217(97)00277-4 [2] 吕志民, 徐金梧.一种适用于热送热装生产计划优化的方法.北京科技大学学报, 2002, 24 (6):675-678 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200206023.htmLv Zhi-Min, Xu Jin-Wu. Optimization method for hot charge rolling manufacture plan. Journal of University of Science and Technology Beijing, 2002, 24 (6):675-678 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200206023.htm [3] Cowling P. A flexible decision support system for steel hot rolling mill scheduling. Computers and Industrial Engineering, 2003, 45(2):307-321 doi: 10.1016/S0360-8352(03)00038-X [4] Zhao J, Wang W, Liu Q L, Wang Z G, Shi P. A two-stage scheduling method for hot rolling and its application. Control Engineering Practice, 2009, 17 (6):629-641 doi: 10.1016/j.conengprac.2008.10.014 [5] Pan C C, Yang G K. A method of solving a large-scale rolling batch scheduling problem in steel production using a variant of column generation. Computers and Industrial Engineering, 2009, 56 (1):165-178 doi: 10.1016/j.cie.2008.05.001 [6] Lee H S, Murthy S S, Haider S W, Morse D V. Primary production scheduling at steelmaking industries. IBM Journal of Research and Development, 1996, 40 (2):231-252 doi: 10.1147/rd.402.0231 [7] Cowling P, Rezi W. Integration of continuous caster and hot strip mill planning for steel production. Journal of Scheduling, 2000, 3 (4):185-208 doi: 10.1002/(ISSN)1099-1425 [8] Tang L X, Liu J Y, Rong A Y, Yang Z H. A review of planning and scheduling systems and methods for integrated steel production. European Journal of Operational Research, 2001, 133 (1):1-20 doi: 10.1016/S0377-2217(00)00240-X [9] 吕志民, 牟文恒, 许剑桦, 唐荻, 徐金梧.两流方式下薄板坯连铸连轧生产组织方法及仿真.北京科技大学学报, 2005, 27 (3):356-359 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200503025.htmLv Zhi-Min, Mu Wen-Heng, Xu Jian-Hua, Tang Di, Xu Jin-Wu. Production organization method and simulation of dual-line thin slab continuous casting and hot rolling. Journal of University of Science and Technology Beijing, 2005, 27 (3):356-359 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200503025.htm [10] 于港, 田乃媛, 徐安军, 贺东风.炼钢——热轧生产计划的优化与协调.冶金能源, 2009, 28 (4):6-9 http://www.cnki.com.cn/Article/CJFDTOTAL-YJLY200904003.htmYu Gang, Tian Nai-Yuan, Xu An-Jun, He Dong-Feng. Optimization and coordination of steelmaking-hot rolling production plan. Energy for Metallurgical Industry, 2009, 28 (4):6-9 http://www.cnki.com.cn/Article/CJFDTOTAL-YJLY200904003.htm [11] 汪恭书, 唐立新.连铸——轧制生产中带有批决策的排序问题的建模与优化方法.自动化学报, 2012, 38 (10):1713-1720 http://www.aas.net.cn/CN/abstract/abstract17727.shtmlWang Gong-Shu, Tang Li-Xin. Modelling and optimization methods for the sequencing problem with batching decision in the continuous-casting and rolling production. Acta Automatica Sinica, 2012, 38 (10):1713-1720 http://www.aas.net.cn/CN/abstract/abstract17727.shtml [12] Chen Z L, Powell W B. Exact algorithms for scheduling multiple families of jobs on parallel machines. Naval Research Logistics, 2003, 50 (7):823-840 doi: 10.1002/(ISSN)1520-6750 [13] Tang L X, Wang G S, Liu J Y. A branch-and-price algorithm to solve the molten iron allocation problem in iron and steel industry. Computers and Operations Research, 2007, 34 (10):3001-3015 doi: 10.1016/j.cor.2005.11.010 [14] Dantzig G B, Wolfe P. Decomposition principle for linear programs. Operations Research, 1960, 8 (1):101-111 doi: 10.1287/opre.8.1.101 [15] Gilmore P C, Gomory R E. A linear programming approach to the cutting stock problem. Operations Research, 1961, 9 (6):849-859 doi: 10.1287/opre.9.6.849 [16] Desrochers M, Desrosiers J, Solomon M. A new optimization algorithm for the vehicle routing problem with time windows. Operations Research, 1992, 40 (2):342-354 doi: 10.1287/opre.40.2.342 [17] Moukrim A, Quilliot A, Toussaint H. An effective branch-and-price algorithm for the preemptive resource constrained project scheduling problem based on minimal interval order enumeration. European Journal of Operational Research, 2015, 244 (2):360-368 doi: 10.1016/j.ejor.2014.12.037 [18] Restrepo M I, Gendron B, Rousseau L M. Branch-and-price for personalized multiactivity tour scheduling. INFORMS Journal on Computing, 2016, 28 (2):334-350 doi: 10.1287/ijoc.2015.0683 [19] Fragkos I, Degraeve Z, De Reyck B. A horizon decomposition approach for the capacitated lot-sizing problem with setup times. INFORMS Journal on Computing, 2016, 28 (3):465-482 doi: 10.1287/ijoc.2016.0691 [20] Tang L X, Wang G S, Chen Z L. Integrated charge batching and casting width selection at baosteel. Operations Research, 2014, 62 (4):772-787 doi: 10.1287/opre.2014.1278 [21] Battarra M, Erdoǧan G, Vigo D. Exact algorithms for the clustered vehicle routing problem. Operations Research, 2014, 62 (1):58-71 doi: 10.1287/opre.2013.1227 [22] Baldacci R, Mingozzi A, Roberti R, Wolfler Calvo R. An exact algorithm for the two-echelon capacitated vehicle routing problem. Operations Research, 2013, 61 (2):298-314 doi: 10.1287/opre.1120.1153 [23] Fleszar K. An exact algorithm for the two-dimensional stage-unrestricted guillotine cutting/packing decision problem. INFORMS Journal on Computing, 2016, 28 (4):703-720 doi: 10.1287/ijoc.2016.0708 [24] Gschwind T, Irnich S. Dual inequalities for stabilized column generation revisited. INFORMS Journal on Computing, 2016, 28 (1):175-194 doi: 10.1287/ijoc.2015.0670 [25] Vanderbeck F. On Dantzig-Wolfe decomposition in integer programming and ways to perform branching in a branch-and-price algorithm. Operations Research, 2000, 48 (1):111-128 doi: 10.1287/opre.48.1.111.12453 期刊类型引用(3)
1. 王国良,宋歌. 基于观测器的离散马氏跳变系统的故障估计. 南京信息工程大学学报(自然科学版). 2021(05): 517-525 .  百度学术
百度学术2. 刘江义,王春平,王暐. 基于双马尔可夫链的SMC-CBMeMBer滤波. 系统工程与电子技术. 2019(08): 1686-1691 . 百度学术3. 郎波,樊一娜. 基于深度神经网络的个性化学习行为评价方法. 计算机技术与发展. 2019(07): 6-10 . 百度学术其他类型引用(7)
-

 下载:
下载:
计量
- 文章访问数: 2362
- HTML全文浏览量: 243
- PDF下载量: 1006
- 被引次数: 10
