2017年 第43卷 第8期
2017, 43(8): 1289-1305.
doi: 10.16383/j.aas.2017.c160822
摘要:
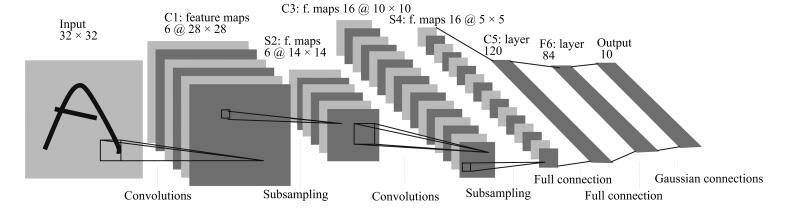
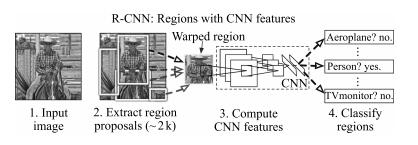
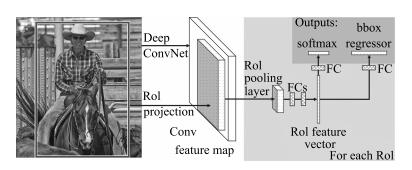
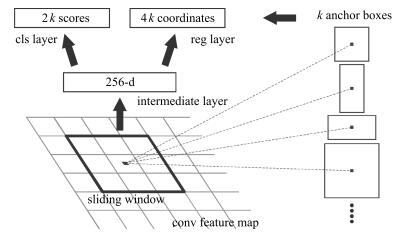
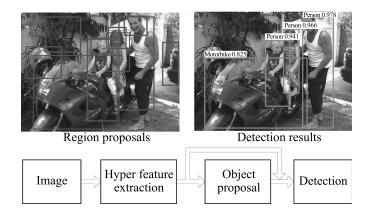
目标视觉检测是计算机视觉领域的一个重要问题,在视频监控、自主驾驶、人机交互等方面具有重要的研究意义和应用价值.近年来,深度学习在图像分类研究中取得了突破性进展,也带动着目标视觉检测取得突飞猛进的发展.本文综述了深度学习在目标视觉检测中的应用进展与展望.首先对目标视觉检测的基本流程进行总结,并介绍了目标视觉检测研究常用的公共数据集;然后重点介绍了目前发展迅猛的深度学习方法在目标视觉检测中的最新应用进展;最后讨论了深度学习方法应用于目标视觉检测时存在的困难和挑战,并对今后的发展趋势进行展望.
目标视觉检测是计算机视觉领域的一个重要问题,在视频监控、自主驾驶、人机交互等方面具有重要的研究意义和应用价值.近年来,深度学习在图像分类研究中取得了突破性进展,也带动着目标视觉检测取得突飞猛进的发展.本文综述了深度学习在目标视觉检测中的应用进展与展望.首先对目标视觉检测的基本流程进行总结,并介绍了目标视觉检测研究常用的公共数据集;然后重点介绍了目前发展迅猛的深度学习方法在目标视觉检测中的最新应用进展;最后讨论了深度学习方法应用于目标视觉检测时存在的困难和挑战,并对今后的发展趋势进行展望.




2017, 43(8): 1306-1318.
doi: 10.16383/j.aas.2017.c160425
摘要:
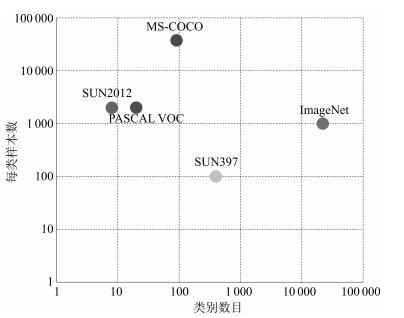
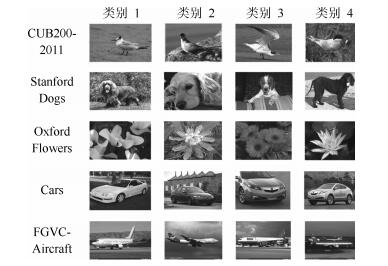
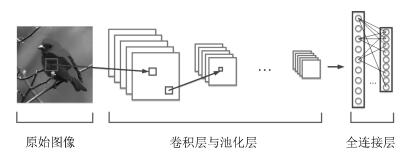
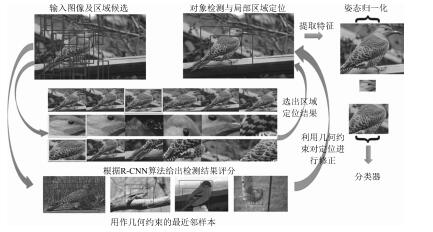
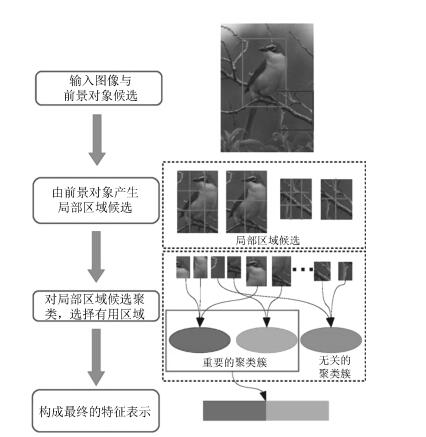
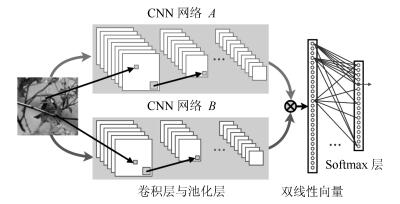
细粒度图像分类问题是计算机视觉领域一项极具挑战的研究课题,其目标是对子类进行识别,如区分不同种类的鸟.由于子类别间细微的类间差异和较大的类内差异,传统的分类算法不得不依赖于大量的人工标注信息.近年来,随着深度学习的发展,深度卷积神经网络为细粒度图像分类带来了新的机遇.大量基于深度卷积特征算法的提出,促进了该领域的快速发展.本文首先从该问题的定义以及研究意义出发,介绍了细粒度图像分类算法的发展现状.之后,从强监督与弱监督两个角度对比分析了不同算法之间的差异,并比较了这些算法在常用数据集上的性能表现.最后,我们对这些算法进行了总结,并讨论了该领域未来可能的研究方向及其面临的挑战.
细粒度图像分类问题是计算机视觉领域一项极具挑战的研究课题,其目标是对子类进行识别,如区分不同种类的鸟.由于子类别间细微的类间差异和较大的类内差异,传统的分类算法不得不依赖于大量的人工标注信息.近年来,随着深度学习的发展,深度卷积神经网络为细粒度图像分类带来了新的机遇.大量基于深度卷积特征算法的提出,促进了该领域的快速发展.本文首先从该问题的定义以及研究意义出发,介绍了细粒度图像分类算法的发展现状.之后,从强监督与弱监督两个角度对比分析了不同算法之间的差异,并比较了这些算法在常用数据集上的性能表现.最后,我们对这些算法进行了总结,并讨论了该领域未来可能的研究方向及其面临的挑战.


2017, 43(8): 1319-1328.
doi: 10.16383/j.aas.2017.c160337
摘要:
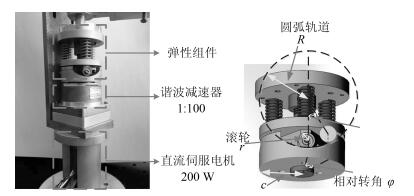
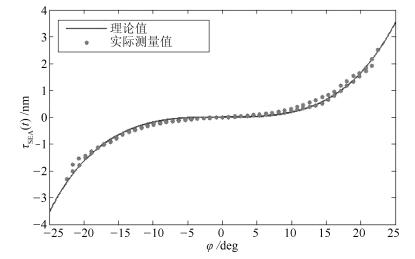
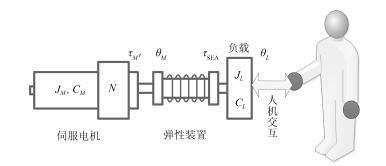
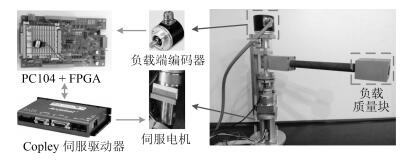
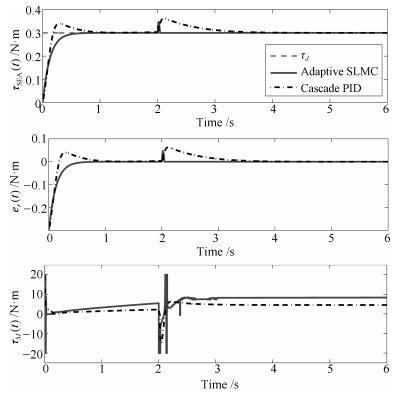
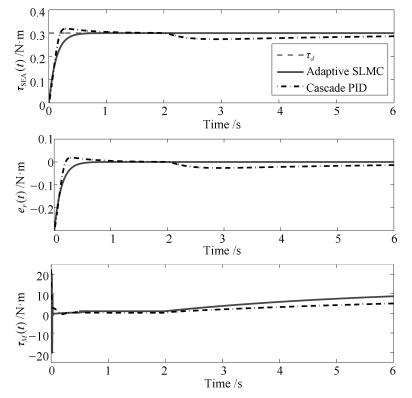
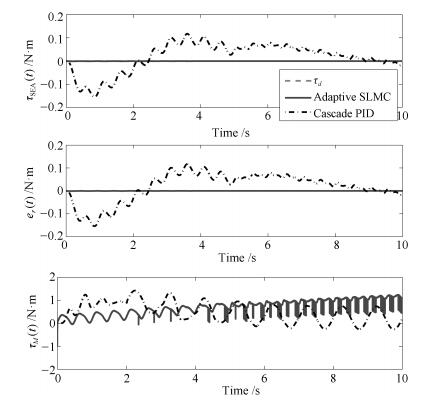
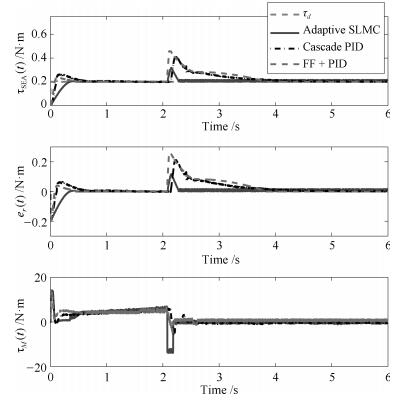
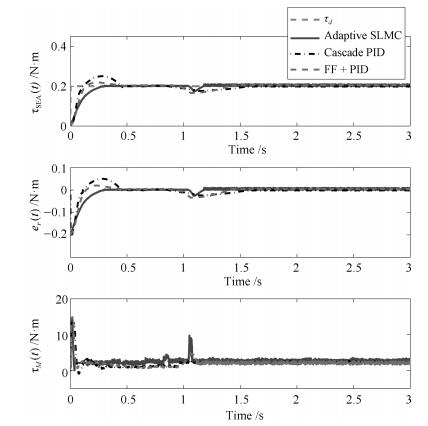
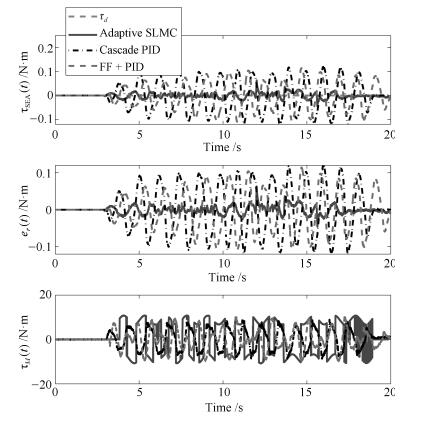
对于串联弹性驱动器(Series elastic actuator,SEA)而言,已有方法大都将其弹性组件视为线性弹簧.然而为了追求更高的能量密度,SEA的机械结构越来越复杂,使其控制问题更具挑战性;此外,现有方法均未考虑当SEA应用于交互系统中,其负载端动力学模型会产生剧烈变化的情况.针对这些问题,本文设计了一种面向交互应用的自适应滑模控制方法.具体而言,首先在考虑了非线性SEA输出特性及系统中可能存在的扰动的情况下,描述了SEA系统的动力学方程,并对其进行了分析和变换.在此基础上设计了负载运动观测器和自适应滑模控制器,使得本文方法能够在负载端动力学模型完全未知的情况下完成SEA的力矩控制.最后通过引入辅助系统,对输入饱和的情况进行了有效的处理.通过理论分析证明了闭环控制系统的稳定性及信号有界性,随后的仿真与实验结果也表明了这种自适应滑模控制器良好的控制性能和对不确定性因素的鲁棒性.
对于串联弹性驱动器(Series elastic actuator,SEA)而言,已有方法大都将其弹性组件视为线性弹簧.然而为了追求更高的能量密度,SEA的机械结构越来越复杂,使其控制问题更具挑战性;此外,现有方法均未考虑当SEA应用于交互系统中,其负载端动力学模型会产生剧烈变化的情况.针对这些问题,本文设计了一种面向交互应用的自适应滑模控制方法.具体而言,首先在考虑了非线性SEA输出特性及系统中可能存在的扰动的情况下,描述了SEA系统的动力学方程,并对其进行了分析和变换.在此基础上设计了负载运动观测器和自适应滑模控制器,使得本文方法能够在负载端动力学模型完全未知的情况下完成SEA的力矩控制.最后通过引入辅助系统,对输入饱和的情况进行了有效的处理.通过理论分析证明了闭环控制系统的稳定性及信号有界性,随后的仿真与实验结果也表明了这种自适应滑模控制器良好的控制性能和对不确定性因素的鲁棒性.
2017, 43(8): 1329-1338.
doi: 10.16383/j.aas.2017.c160768
摘要:
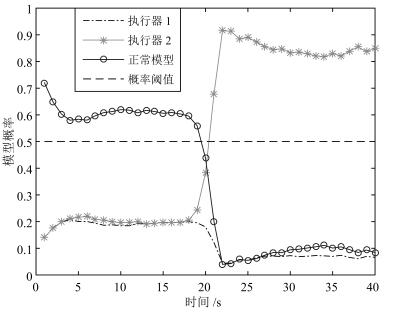
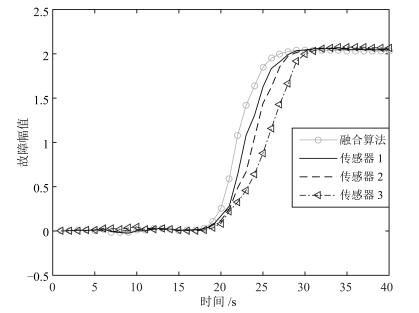
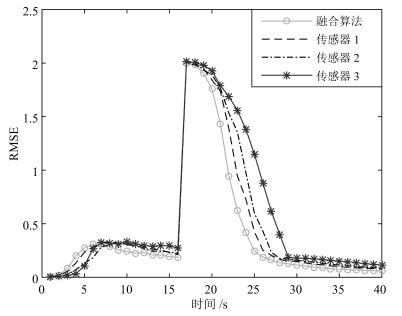
针对一类带随机丢包的异步多传感器网络化系统,提出了基于网络化异步交互式多模型(Interacting multiple model,IMM)融合滤波的故障诊断方法.考虑不同传感器通道具有不同丢包概率的情况,将未知的故障幅值看作扩维的系统状态,利用提出的网络化异步IMM融合滤波算法对由系统正常模型和各种可能的故障模型构成的模型集进行滤波,根据模型概率进行故障检测和定位,同时得到故障幅值和系统状态的联合估计.提出的方法避免了传统IMM故障诊断方法模型集设计中故障大小难以确定的问题,适用于具有任意采样速率和任意初始采样时刻的异步多传感器网络化系统,并且通过融合多个传感器的信息提高了故障诊断的准确性.仿真实例验证了所提出方法的可行性和有效性.
针对一类带随机丢包的异步多传感器网络化系统,提出了基于网络化异步交互式多模型(Interacting multiple model,IMM)融合滤波的故障诊断方法.考虑不同传感器通道具有不同丢包概率的情况,将未知的故障幅值看作扩维的系统状态,利用提出的网络化异步IMM融合滤波算法对由系统正常模型和各种可能的故障模型构成的模型集进行滤波,根据模型概率进行故障检测和定位,同时得到故障幅值和系统状态的联合估计.提出的方法避免了传统IMM故障诊断方法模型集设计中故障大小难以确定的问题,适用于具有任意采样速率和任意初始采样时刻的异步多传感器网络化系统,并且通过融合多个传感器的信息提高了故障诊断的准确性.仿真实例验证了所提出方法的可行性和有效性.


2017, 43(8): 1339-1349.
doi: 10.16383/j.aas.2017.c160389
摘要:
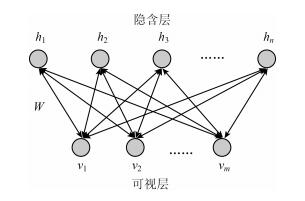
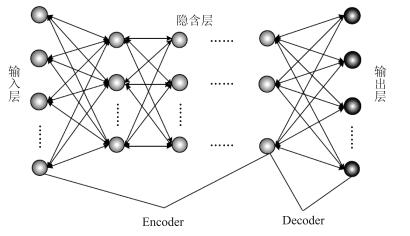
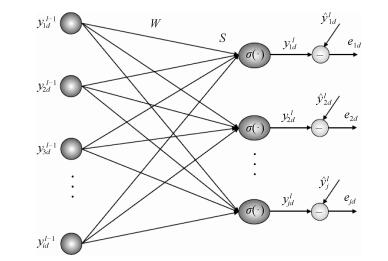
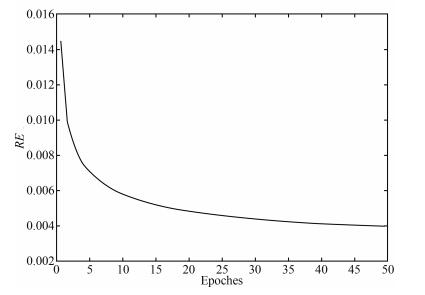
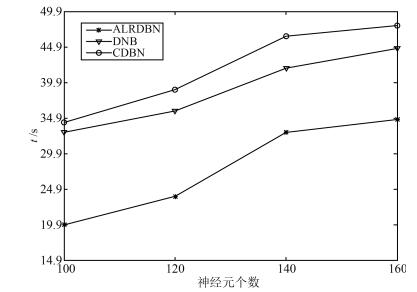
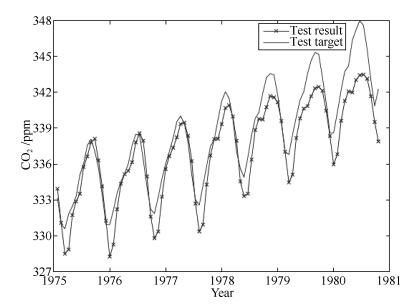
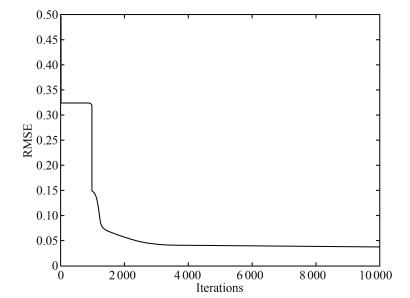
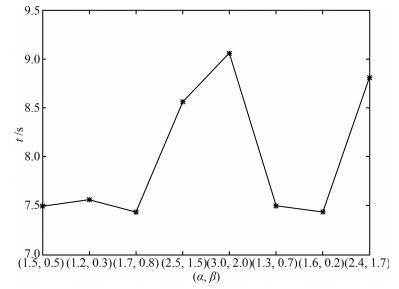
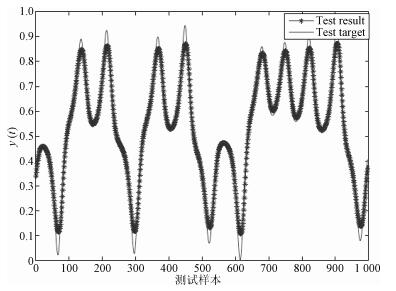
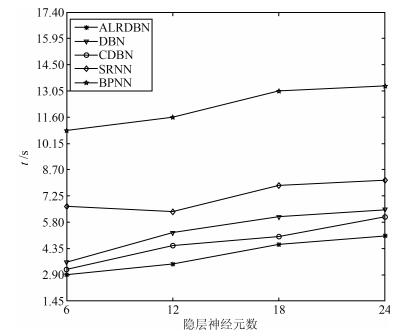
针对深度信念网(Deep belief network,DBN)预训练耗时长的问题,提出了一种基于自适应学习率的DBN(Adaptive learning rate DBN,ALRDBN).ALRDBN将自适应学习率引入到对比差度(Contrastive divergence,CD)算法中,通过自动调整学习步长来提高CD算法的收敛速度.然后设计基于自适应学习率的权值训练方法,通过网络性能分析给出学习率变化系数的范围.最后,通过一系列的实验对所设计的ALRDBN进行测试,仿真实验结果表明,ALRDBN的收敛速度得到了提高且预测精度也有所改善.
针对深度信念网(Deep belief network,DBN)预训练耗时长的问题,提出了一种基于自适应学习率的DBN(Adaptive learning rate DBN,ALRDBN).ALRDBN将自适应学习率引入到对比差度(Contrastive divergence,CD)算法中,通过自动调整学习步长来提高CD算法的收敛速度.然后设计基于自适应学习率的权值训练方法,通过网络性能分析给出学习率变化系数的范围.最后,通过一系列的实验对所设计的ALRDBN进行测试,仿真实验结果表明,ALRDBN的收敛速度得到了提高且预测精度也有所改善.










2017, 43(8): 1350-1357.
doi: 10.16383/j.aas.2017.c150876
摘要:
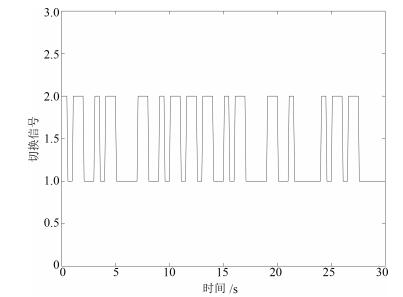
以网络控制系统为研究对象,讨论传感器发送功率对系统性能和通信能耗的影响.首先,针对无线通信系统中存在的丢包问题,根据发送功率的大小,建立系统切换模型,其中,发送功率越大,丢包率越低,系统性能越好.然后,利用平均驻留时间技术,得到系统指数均方稳定的充分条件以及发送功率的可调度条件.最后,根据以上结果,给出系统功率分配和控制器增益的协同设计算法,该算法不仅能保证系统具有理想的控制性能,同时能够使得通信能耗最优.
以网络控制系统为研究对象,讨论传感器发送功率对系统性能和通信能耗的影响.首先,针对无线通信系统中存在的丢包问题,根据发送功率的大小,建立系统切换模型,其中,发送功率越大,丢包率越低,系统性能越好.然后,利用平均驻留时间技术,得到系统指数均方稳定的充分条件以及发送功率的可调度条件.最后,根据以上结果,给出系统功率分配和控制器增益的协同设计算法,该算法不仅能保证系统具有理想的控制性能,同时能够使得通信能耗最优.

2017, 43(8): 1358-1369.
doi: 10.16383/j.aas.2017.c150752
摘要:
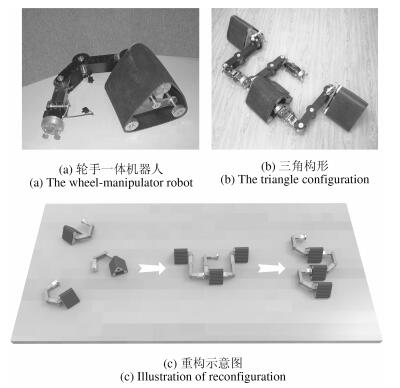
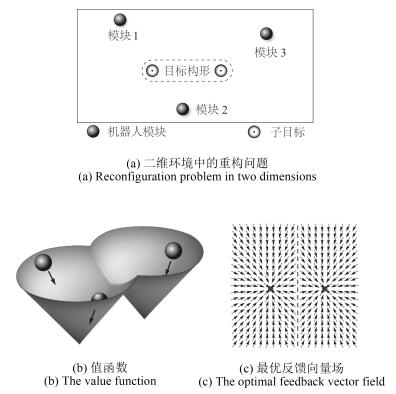
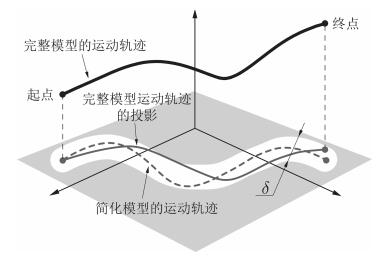
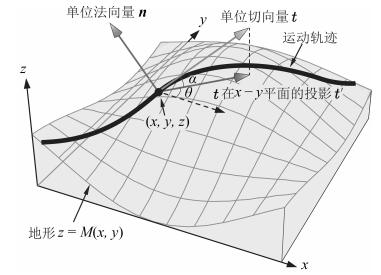
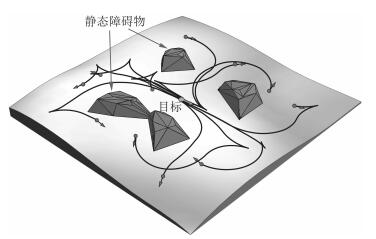
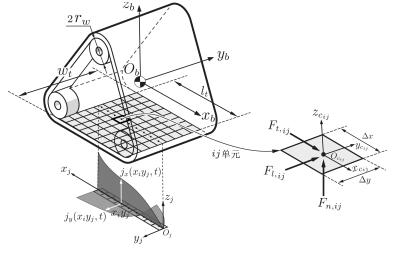
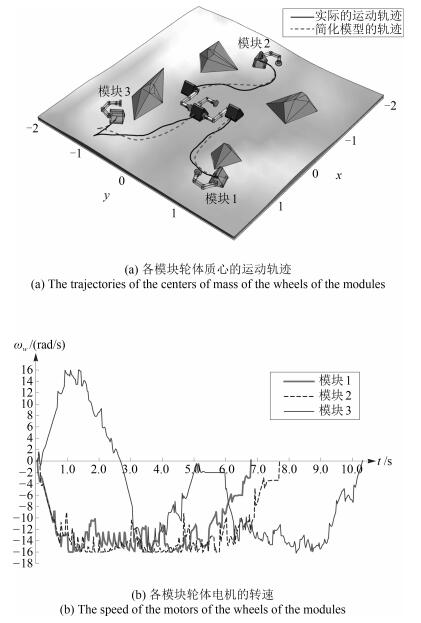
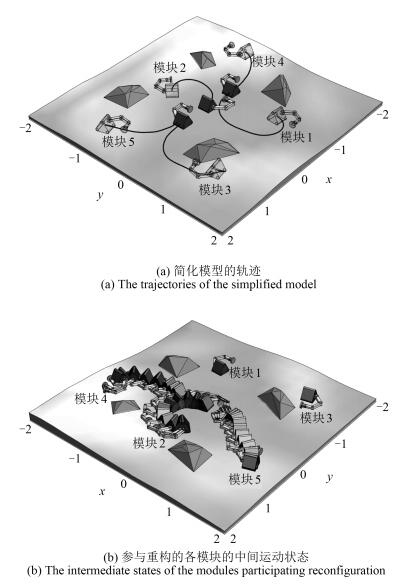
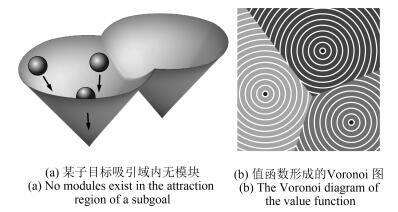
模块化机器人的重构规划中,由于各模块的目标分配与其轨迹规划之间的耦合关系导致组合爆炸问题.本文提出一种基于简化模型的能量次优规划方法,将重构规划问题转化为最优控制问题,实现目标分配与轨迹规划的解耦.通过求解由Hamilton-Jacobi-Bellman(HJB)方程描述的最优控制问题,得到简化模型的值函数和最优轨迹.各模块的运动目标由值函数的吸引域决定.通过在最优轨迹附近的次优区域内搜索得到实际运动轨迹,提高了搜索效率.仿真实验结果表明,该方法能够选择合适的模块组合,并能在障碍物环境中生成满足机器人动力学约束的运动轨迹.
模块化机器人的重构规划中,由于各模块的目标分配与其轨迹规划之间的耦合关系导致组合爆炸问题.本文提出一种基于简化模型的能量次优规划方法,将重构规划问题转化为最优控制问题,实现目标分配与轨迹规划的解耦.通过求解由Hamilton-Jacobi-Bellman(HJB)方程描述的最优控制问题,得到简化模型的值函数和最优轨迹.各模块的运动目标由值函数的吸引域决定.通过在最优轨迹附近的次优区域内搜索得到实际运动轨迹,提高了搜索效率.仿真实验结果表明,该方法能够选择合适的模块组合,并能在障碍物环境中生成满足机器人动力学约束的运动轨迹.
2017, 43(8): 1370-1382.
doi: 10.16383/j.aas.2017.c160435
摘要:
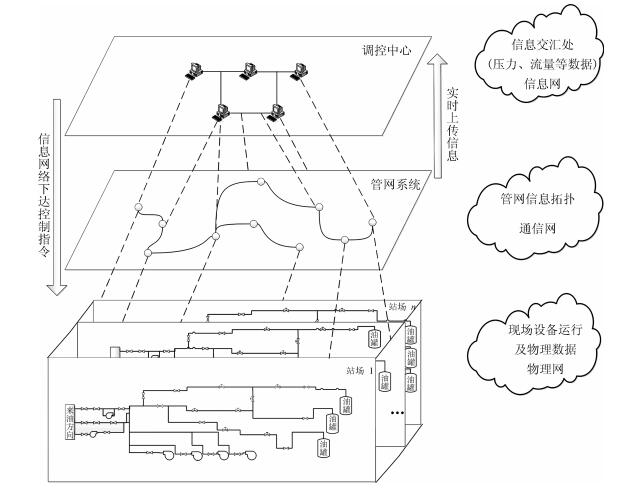
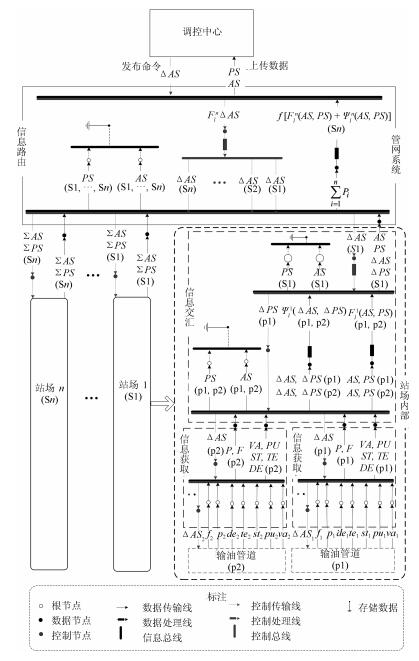
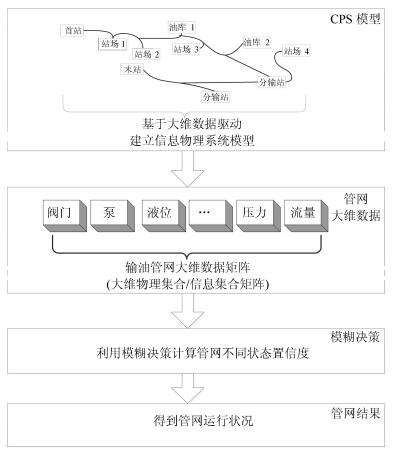
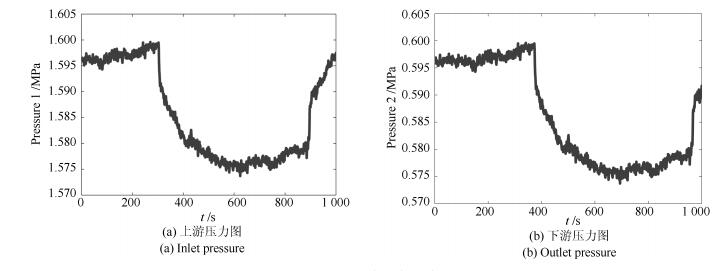
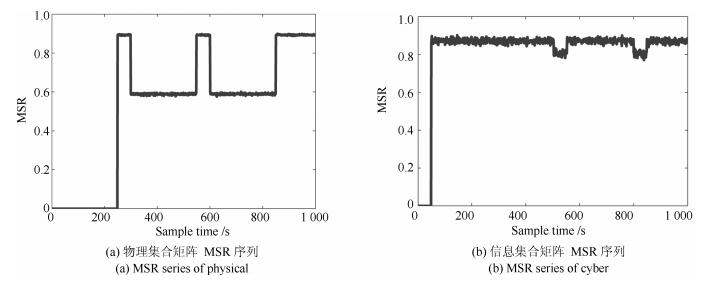
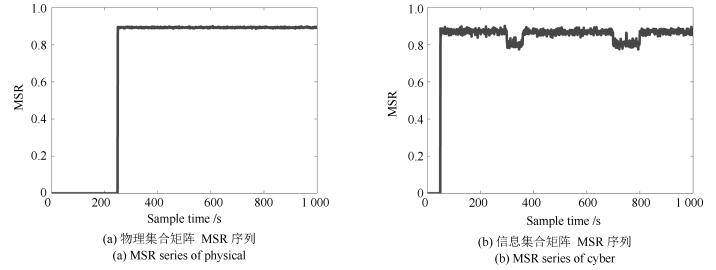
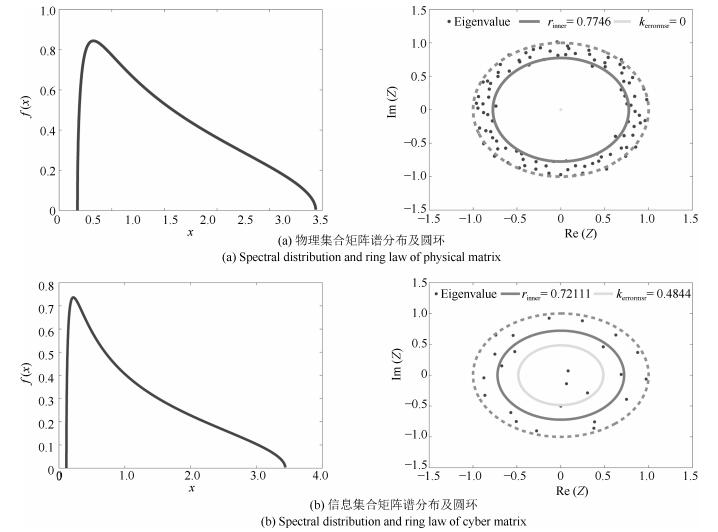
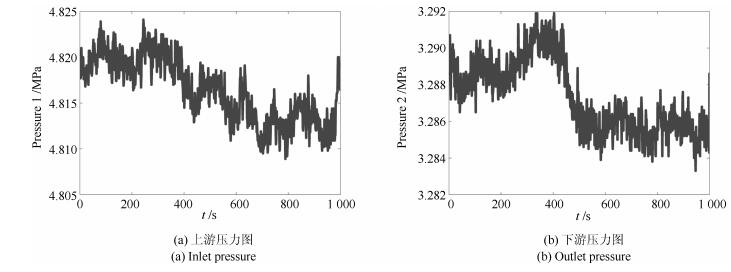
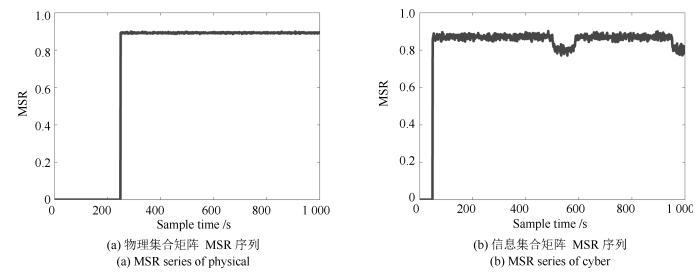
输油管网状态量多及工艺复杂,难以建立精确的管网数学模型,为了能够实时监控管网的安全运行情况,本文提出一种基于大维数据驱动的管网泄漏监控模糊决策方法.首先利用管网现有的数据信息,在不对数据进行降维处理的情况下,从信息物理系统的角度出发,将油气管网的拓扑结构、阀门开度等管道物理数据以及压力、流量等运行信息数据结合起来对复杂管网系统建立数据驱动模型.然后基于大维随机矩阵谱理论,将得到的信息物理数据协方差矩阵谱分布及圆环率作为模糊决策的条件对管网运行情况进行判断.当管网拓扑发生动态变化时,提出的方法可以有效地解决误报率高的问题.最后通过仿真及实例的分析,可以证明所提出方法的有效性.
输油管网状态量多及工艺复杂,难以建立精确的管网数学模型,为了能够实时监控管网的安全运行情况,本文提出一种基于大维数据驱动的管网泄漏监控模糊决策方法.首先利用管网现有的数据信息,在不对数据进行降维处理的情况下,从信息物理系统的角度出发,将油气管网的拓扑结构、阀门开度等管道物理数据以及压力、流量等运行信息数据结合起来对复杂管网系统建立数据驱动模型.然后基于大维随机矩阵谱理论,将得到的信息物理数据协方差矩阵谱分布及圆环率作为模糊决策的条件对管网运行情况进行判断.当管网拓扑发生动态变化时,提出的方法可以有效地解决误报率高的问题.最后通过仿真及实例的分析,可以证明所提出方法的有效性.




2017, 43(8): 1383-1392.
doi: 10.16383/j.aas.2017.c160372
摘要:
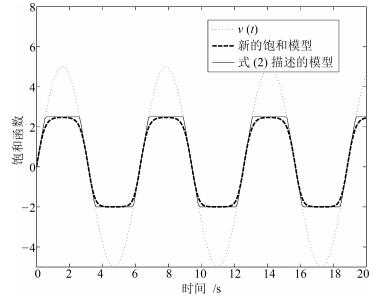
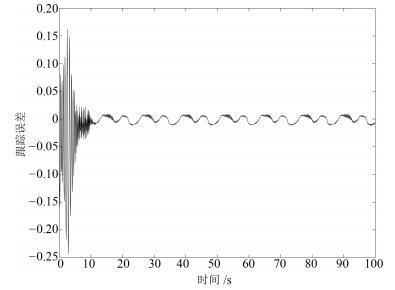
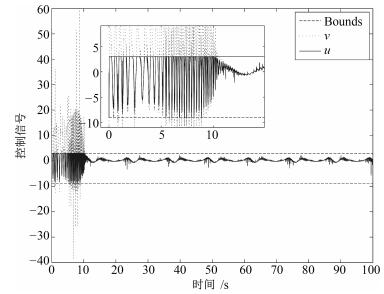
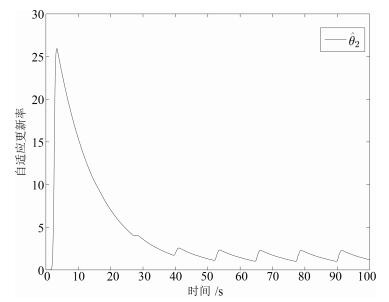
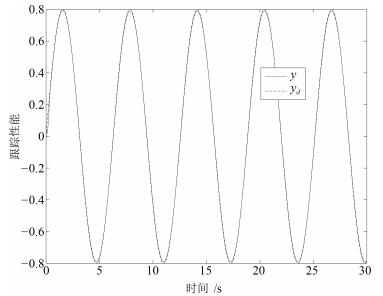
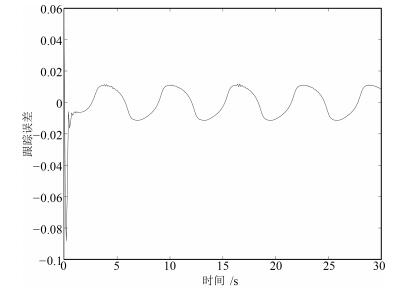
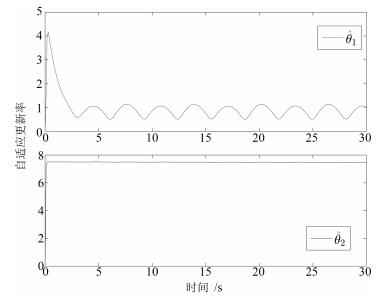
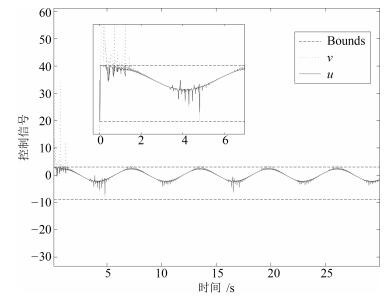
针对单输入单输出系统研究一种在任意切换下的跟踪控制问题,系统包含未知扰动和输入饱和特性.首先,利用高斯误差函数描述一个连续可导的非对称饱和模型.其次,利用径向基神经网络(Radial basis function neural network,RBF NN)逼近未知的系统动态.最后,基于公共的Lyapunov函数构造状态反馈控制器.设计的控制器避免过多参数调节从而减轻计算负荷.结果展示本文给出的状态反馈控制器可以保证闭环系统的所有信号是半全局一致有界的,并且跟踪误差可收敛到零值小的领域内.最后的仿真结果进一步验证提出方法的有效性.
针对单输入单输出系统研究一种在任意切换下的跟踪控制问题,系统包含未知扰动和输入饱和特性.首先,利用高斯误差函数描述一个连续可导的非对称饱和模型.其次,利用径向基神经网络(Radial basis function neural network,RBF NN)逼近未知的系统动态.最后,基于公共的Lyapunov函数构造状态反馈控制器.设计的控制器避免过多参数调节从而减轻计算负荷.结果展示本文给出的状态反馈控制器可以保证闭环系统的所有信号是半全局一致有界的,并且跟踪误差可收敛到零值小的领域内.最后的仿真结果进一步验证提出方法的有效性.



2017, 43(8): 1393-1401.
doi: 10.16383/j.aas.2017.c150777
摘要:
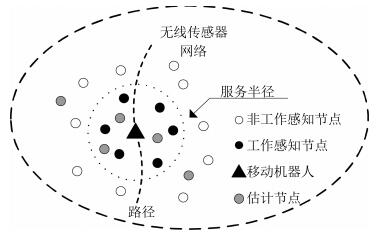
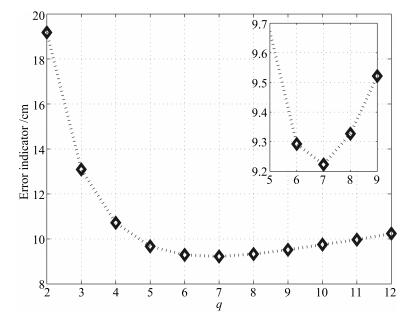
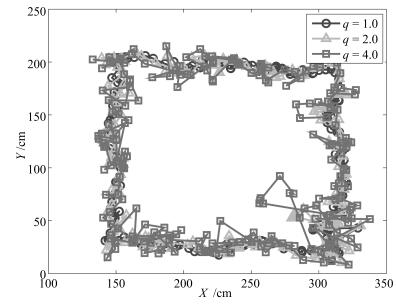
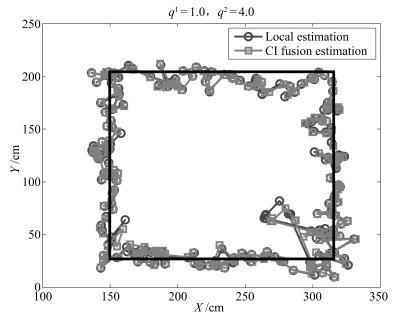
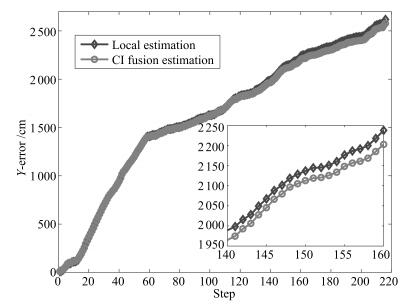
研究了一类基于RSSI(Received signal strength indication)测距的分布式移动目标跟踪问题,提出了一种适用于事件触发无线传感器网络(Wireless sensor networks,WSNs)的分布式随机目标跟踪方法.首先考虑移动机器人模型的不确定性,引入了带有随机参数的过程噪声协方差,应用改进平方根容积卡尔曼滤波(Square root cubature Kalman filter,SRCKF)得到局部估计;然后采用无模型CI(Covariance intersection)融合估计方法以降低随机过程噪声协方差带来的不利影响.该方法充分利用有模型和无模型方法的优势,实现系统模型和量测不理想情况下的分布式目标跟踪.基于E-puck机器人的目标跟踪实验表明,事件触发的工作模式可有效地减少能量消耗,带随机参数的滤波方法更适合于随机目标的跟踪.
研究了一类基于RSSI(Received signal strength indication)测距的分布式移动目标跟踪问题,提出了一种适用于事件触发无线传感器网络(Wireless sensor networks,WSNs)的分布式随机目标跟踪方法.首先考虑移动机器人模型的不确定性,引入了带有随机参数的过程噪声协方差,应用改进平方根容积卡尔曼滤波(Square root cubature Kalman filter,SRCKF)得到局部估计;然后采用无模型CI(Covariance intersection)融合估计方法以降低随机过程噪声协方差带来的不利影响.该方法充分利用有模型和无模型方法的优势,实现系统模型和量测不理想情况下的分布式目标跟踪.基于E-puck机器人的目标跟踪实验表明,事件触发的工作模式可有效地减少能量消耗,带随机参数的滤波方法更适合于随机目标的跟踪.


2017, 43(8): 1402-1411.
doi: 10.16383/j.aas.2017.c160043
摘要:
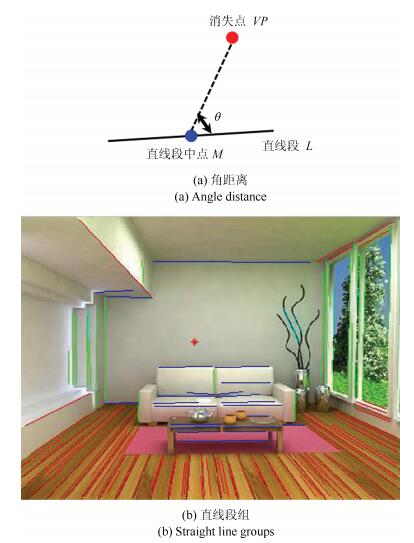
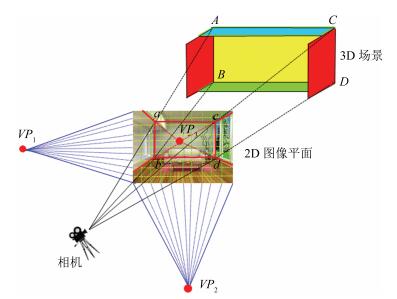
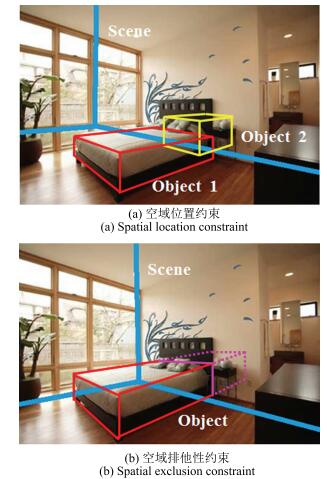
对结构化室内场景的空域布局结构进行估计是计算机视觉领域的研究热点之一.然而,对于内部堆放了众多杂乱物体的室内场景,现有的大多数方法容易受到各种物体遮挡的影响而无法对这一类场景的布局结构进行准确推理.为此,本文方法充分考虑了房间和物体之间的几何和语义关联性,参数化地对房间和内部物体的三维体积分别进行描述,并且提出利用多种高层图像语义来获取物体的先验信息.此外,还在此基础上加入了空域排他性和空域位置等多种空域约束,进而在改进室内场景空域布局估计的同时为物体的识别和定位提供关键信息.本文方法不仅具有较低的求解复杂度,而且通过试验表明相比于现有的经典方法在杂乱的室内场景中能够取得更为鲁棒的空域布局推理结果.
对结构化室内场景的空域布局结构进行估计是计算机视觉领域的研究热点之一.然而,对于内部堆放了众多杂乱物体的室内场景,现有的大多数方法容易受到各种物体遮挡的影响而无法对这一类场景的布局结构进行准确推理.为此,本文方法充分考虑了房间和物体之间的几何和语义关联性,参数化地对房间和内部物体的三维体积分别进行描述,并且提出利用多种高层图像语义来获取物体的先验信息.此外,还在此基础上加入了空域排他性和空域位置等多种空域约束,进而在改进室内场景空域布局估计的同时为物体的识别和定位提供关键信息.本文方法不仅具有较低的求解复杂度,而且通过试验表明相比于现有的经典方法在杂乱的室内场景中能够取得更为鲁棒的空域布局推理结果.






2017, 43(8): 1412-1417.
doi: 10.16383/j.aas.2017.e160020
摘要:
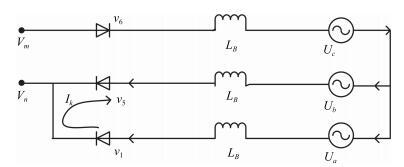
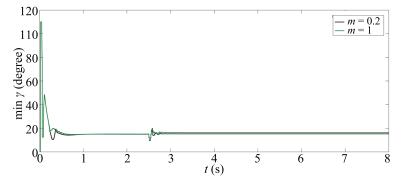
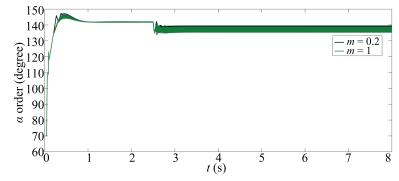
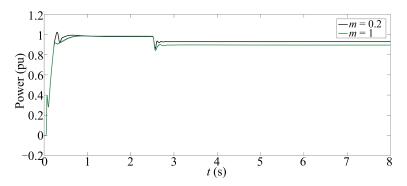
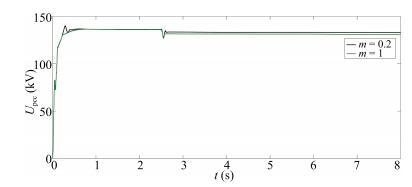
Possibility of serious harmonic distortion (SHD) increases as multi-infeed direct current (MIDC) transmission develops rapidly in recent years. In this paper, the mechanism of high voltage direct current (HVDC) controller working against SHD is proposed for theoretical derivation of phase locked loop (PLL) output and valve commutation process. To reduce static error of constant extinction angle (CEA) controller and enhance active power transmission, the insertion of current error (CE) controller into CEA is minified. A calculation of inverter operating point is proposed in the end. The correctness of mechanism and algorithm is verified through power systems computer aided design (PSCAD) simulation.
Possibility of serious harmonic distortion (SHD) increases as multi-infeed direct current (MIDC) transmission develops rapidly in recent years. In this paper, the mechanism of high voltage direct current (HVDC) controller working against SHD is proposed for theoretical derivation of phase locked loop (PLL) output and valve commutation process. To reduce static error of constant extinction angle (CEA) controller and enhance active power transmission, the insertion of current error (CE) controller into CEA is minified. A calculation of inverter operating point is proposed in the end. The correctness of mechanism and algorithm is verified through power systems computer aided design (PSCAD) simulation.






2017, 43(8): 1418-1424.
doi: 10.16383/j.aas.2017.e150291
摘要:
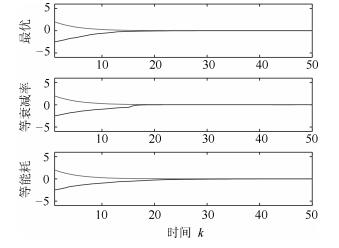
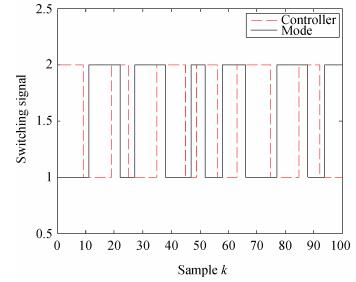
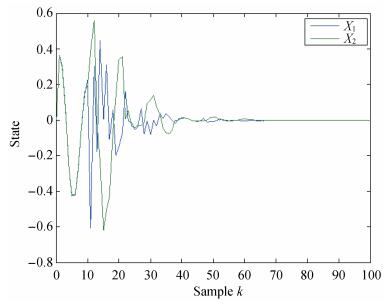
For a class of switched linear systems, we propose a dwell time strategy depending on the state of systems. This switching strategy not only makes the asynchronous H∞ state-feedback switched systems stable but also shortens the active time. A new result on stability and l2-gain analysis for switched systems is given where the Lyapunov functions are allowed to be increasing during the running time of subsystems, at the same time, the Lyapunov functions do not contain the limit of μ. By using the dwell time strategy depending on the state of systems, sufficient conditions for the desired H∞ controller of switched linear systems are derived. Then the result is expanded to nonlinear switched systems. A numerical example is provided to demonstrate the effectiveness of the proposed design approach.
For a class of switched linear systems, we propose a dwell time strategy depending on the state of systems. This switching strategy not only makes the asynchronous H∞ state-feedback switched systems stable but also shortens the active time. A new result on stability and l2-gain analysis for switched systems is given where the Lyapunov functions are allowed to be increasing during the running time of subsystems, at the same time, the Lyapunov functions do not contain the limit of μ. By using the dwell time strategy depending on the state of systems, sufficient conditions for the desired H∞ controller of switched linear systems are derived. Then the result is expanded to nonlinear switched systems. A numerical example is provided to demonstrate the effectiveness of the proposed design approach.
2017, 43(8): 1425-1433.
doi: 10.16383/j.aas.2017.e150348
摘要:
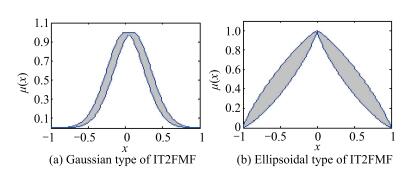
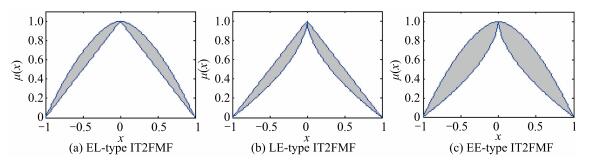
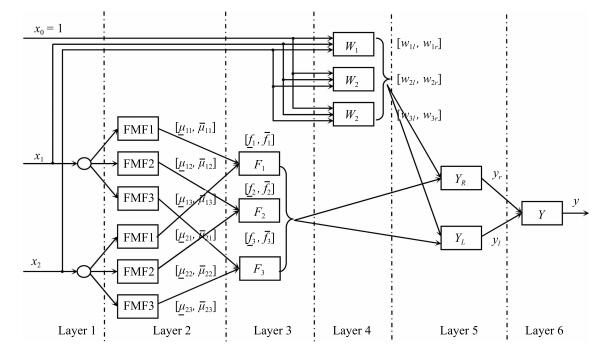
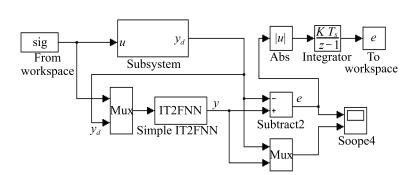
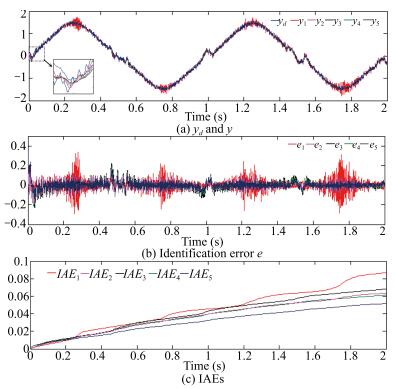
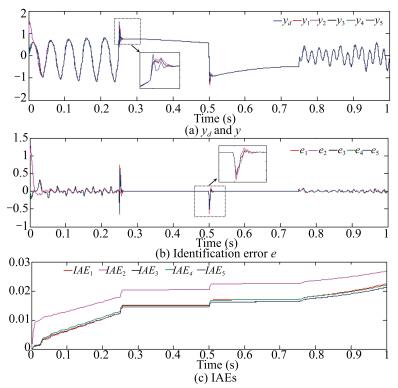
A new type of fuzzy membership function (FMF) is proposed for interval type-2 fuzzy neural network (IT2FNN) in this paper. Three types of interval type-2 FMF (IT2FMF) can be derived from the proposed type of FMF. And each type of IT2FMF has different shape of footprint of uncertainty (FOU). The derived IT2FMFs are applied to a simplified T2FNN to identify two nonlinear systems. The identification performance of the derived IT2FMFs are compared with Gaussian and ellipsoidal type of IT2FMFs through simulation. Simulation results certify that the derived IT2FMFs can achieve better identification performance than Gaussian and ellipsoidal type of IT2FMFs with elaborately tuning of the parameters for the simplified IT2FNN.
A new type of fuzzy membership function (FMF) is proposed for interval type-2 fuzzy neural network (IT2FNN) in this paper. Three types of interval type-2 FMF (IT2FMF) can be derived from the proposed type of FMF. And each type of IT2FMF has different shape of footprint of uncertainty (FOU). The derived IT2FMFs are applied to a simplified T2FNN to identify two nonlinear systems. The identification performance of the derived IT2FMFs are compared with Gaussian and ellipsoidal type of IT2FMFs through simulation. Simulation results certify that the derived IT2FMFs can achieve better identification performance than Gaussian and ellipsoidal type of IT2FMFs with elaborately tuning of the parameters for the simplified IT2FNN.


2017, 43(8): 1434-1442.
doi: 10.16383/j.aas.2017.e150252
摘要:
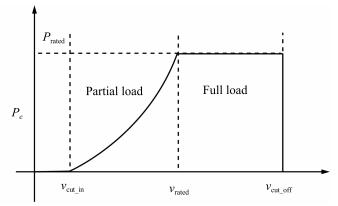
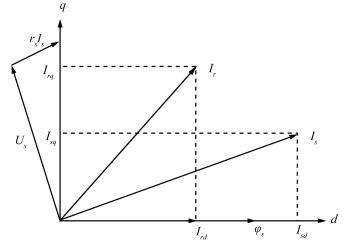
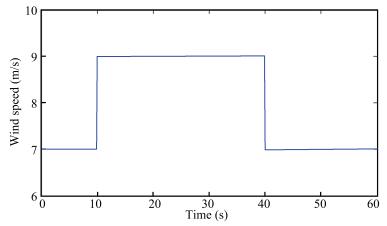
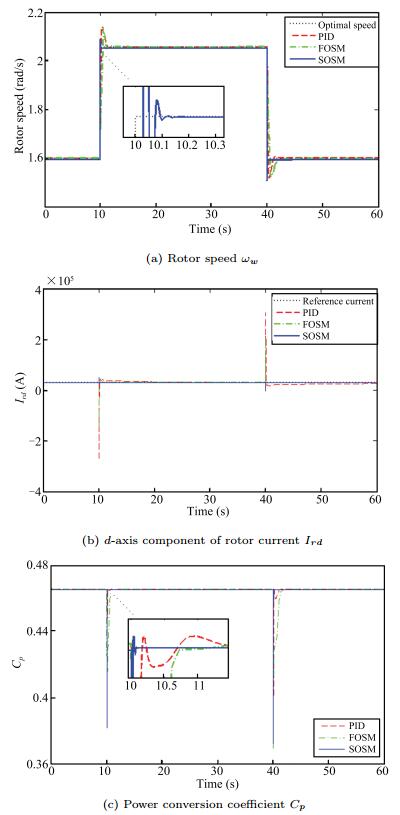
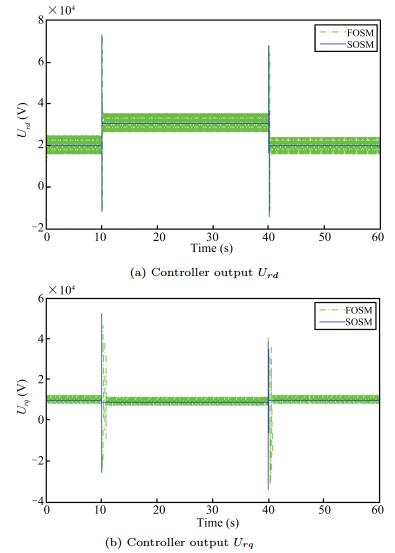
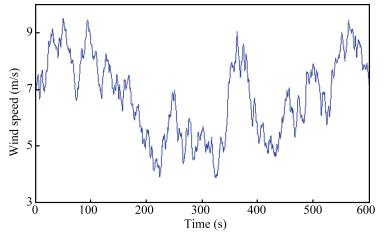
This paper proposes a super-twisting second order sliding mode control scheme to maximize the wind energy capture of a doubly fed induction generator based variable speed wind turbine (VSWT) system, and minimize the reactive power simultaneously. Two second order sliding mode controllers are designed to achieve the control objectives, reduce mechanical stress and improve control accuracy. By regulating the generator rotor voltage, one controller makes the wind turbine rotor speed track the optimal speed, which can maximize power generation. The other maintains the rotor current at rated value to minimize the reactive power. A quadratic form Lyapunov function is adopted to determine the range of controller parameters and guarantee the finite time stability. Simulation results on a 1.5MW doubly fed induction generator (DFIG)-based variable speed wind turbine demonstrate the validity of the proposed control strategy.
This paper proposes a super-twisting second order sliding mode control scheme to maximize the wind energy capture of a doubly fed induction generator based variable speed wind turbine (VSWT) system, and minimize the reactive power simultaneously. Two second order sliding mode controllers are designed to achieve the control objectives, reduce mechanical stress and improve control accuracy. By regulating the generator rotor voltage, one controller makes the wind turbine rotor speed track the optimal speed, which can maximize power generation. The other maintains the rotor current at rated value to minimize the reactive power. A quadratic form Lyapunov function is adopted to determine the range of controller parameters and guarantee the finite time stability. Simulation results on a 1.5MW doubly fed induction generator (DFIG)-based variable speed wind turbine demonstrate the validity of the proposed control strategy.




2017, 43(8): 1443-1456.
doi: 10.16383/j.aas.2017.e150300
摘要:
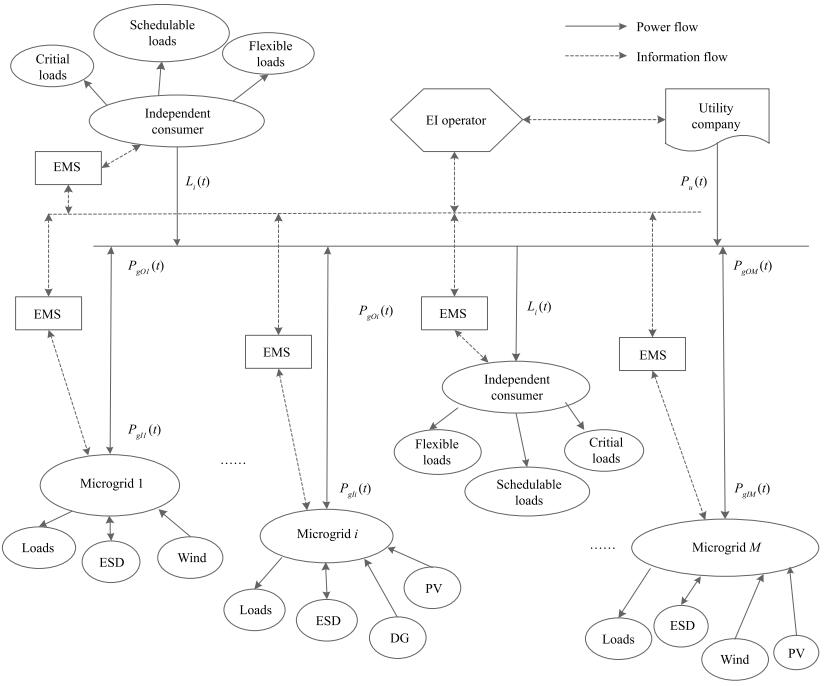
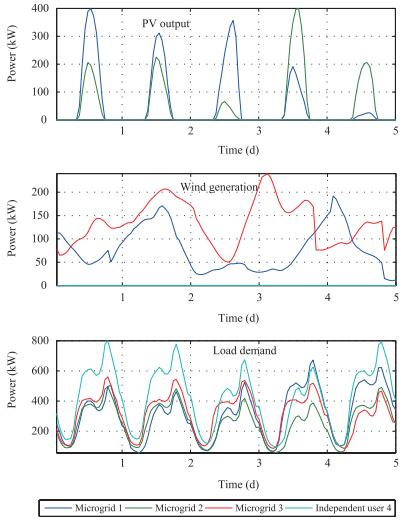
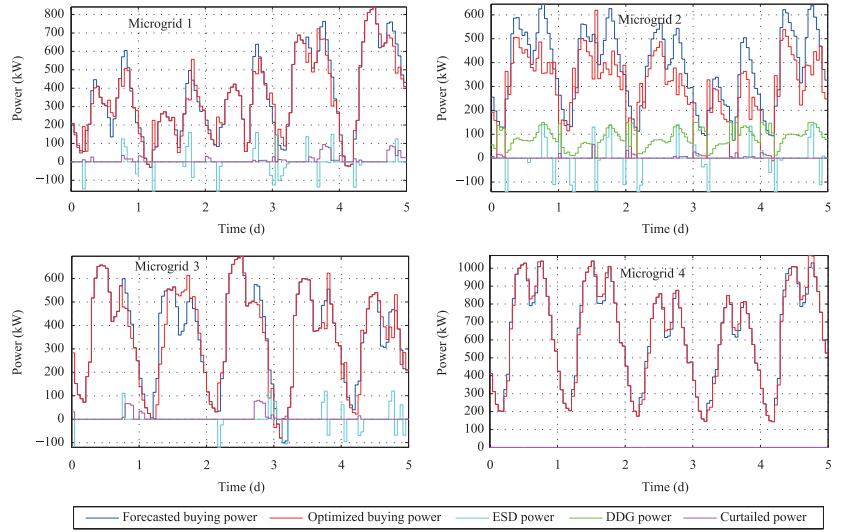
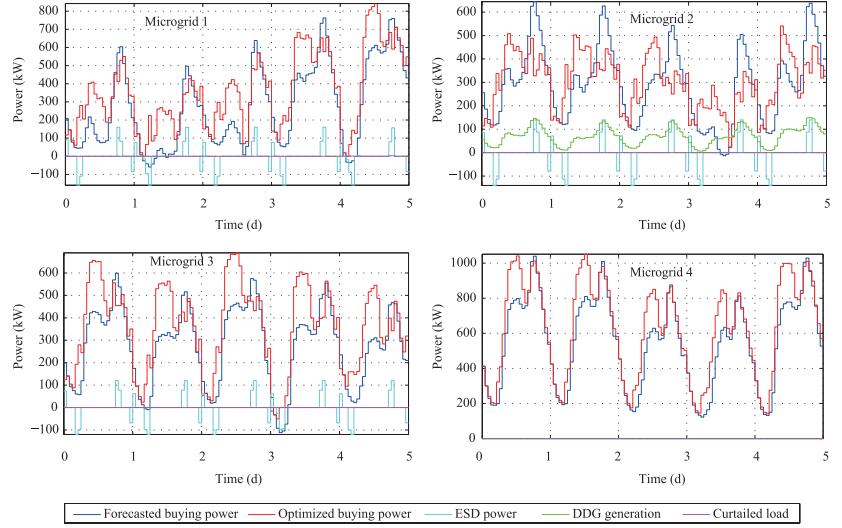
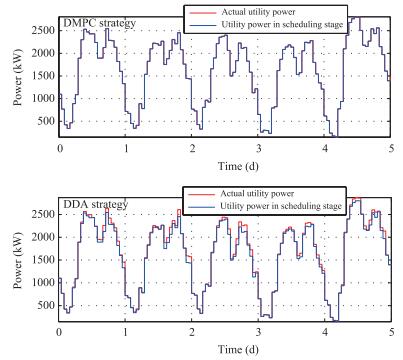
This paper focuses on the development of optimization-based distributed scheduling strategies for the coordination of an energy internet (EI) with multi-microgrids with consideration of forecast uncertainties. All microgrids have flexible loads, schedulable loads and critical loads; some microgrids have distributed generators, such as micro-turbines, wind turbines, photovoltaic panels; besides, a few microgrids have energy storage devices, such as battery storage. Each microgrid is considered as an individual entity and has its individual objective, these objective functions of microgrids are formulated by mixed integer programming (MIP) models. A game theory based parallel distributed optimization algorithm is proposed to coordinate the competitive objectives of the microgrids with only a little information interaction. A model predictive control (MPC) framework which integrates the distributed optimization algorithm is developed to reduce the negative impacts introduced by the uncertainties of the EI. Simulation results show that our method is flexible and efficient.
This paper focuses on the development of optimization-based distributed scheduling strategies for the coordination of an energy internet (EI) with multi-microgrids with consideration of forecast uncertainties. All microgrids have flexible loads, schedulable loads and critical loads; some microgrids have distributed generators, such as micro-turbines, wind turbines, photovoltaic panels; besides, a few microgrids have energy storage devices, such as battery storage. Each microgrid is considered as an individual entity and has its individual objective, these objective functions of microgrids are formulated by mixed integer programming (MIP) models. A game theory based parallel distributed optimization algorithm is proposed to coordinate the competitive objectives of the microgrids with only a little information interaction. A model predictive control (MPC) framework which integrates the distributed optimization algorithm is developed to reduce the negative impacts introduced by the uncertainties of the EI. Simulation results show that our method is flexible and efficient.
2017, 43(8): 1457-1464.
doi: 10.16383/j.aas.2017.e150129
摘要:
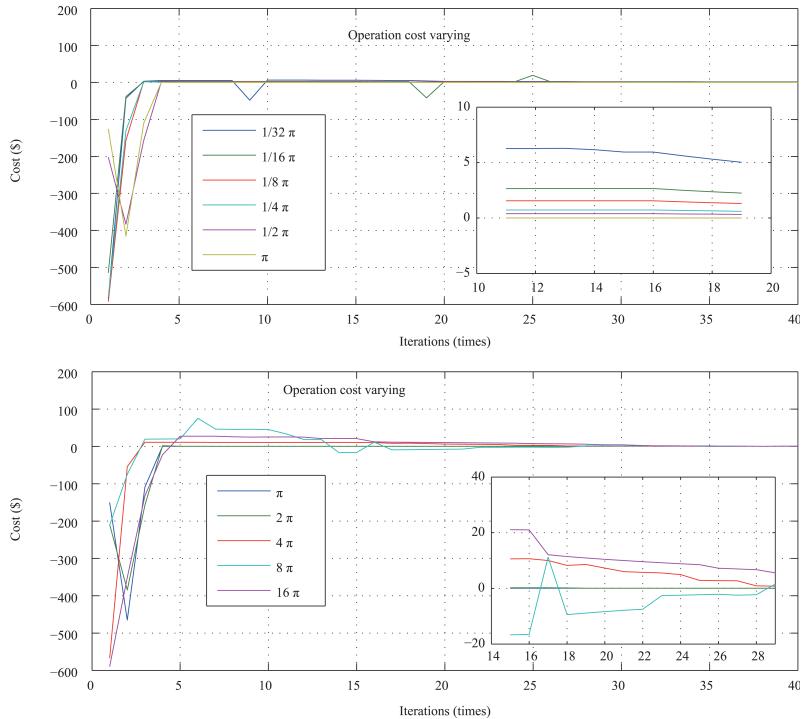
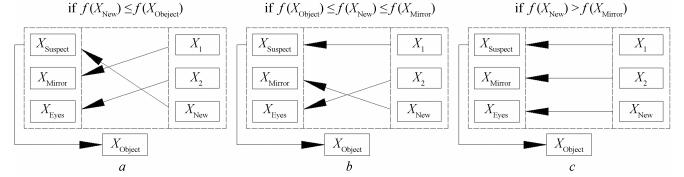
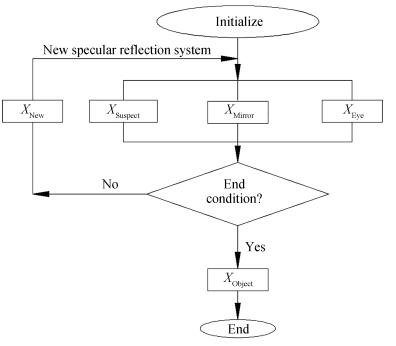
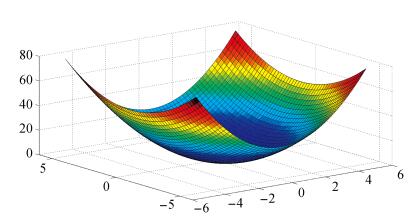
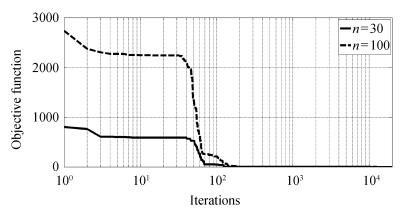
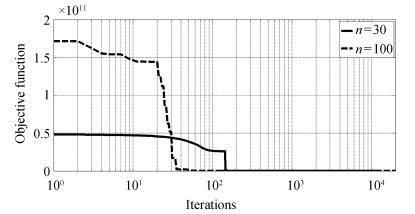
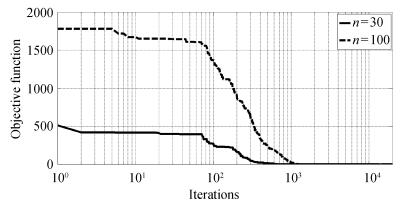
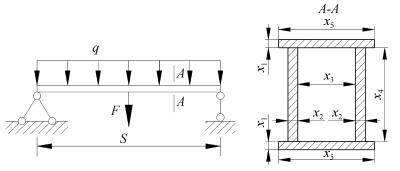
In this paper, a novel global optimization method-specular reflection algorithm (SRA) is proposed, which simulates the unique optical property of mirror-reflection function. Combining the computing features of the SRA with traditional mathematical theories, the global convergence ability of the SRA is verified. The reasonable value of the SRA's control parameter is analysed, so that the best control parameter which is suitable for current optimization problems can be acquired. Four numerical examples are researched using the SRA and other 4 classical intelligent optimization methods, such as particle swarm optimization, Kalman swarm optimization, etc. Simulation results of numerical examples demonstrated the effectiveness and superiority of the SRA, especially its suitability for solving high dimensional, multi-peak complex functions. Finally the structure of general bridge crane is investigated and designed by SRA for robust reliability optimization design. The results illustrate that the SRA is reasonable, accurate and can be treated as an effective analysis technique in reliability-based robust optimization design. It can be predicted that the SRA can be widely used in engineering for creating more value.
In this paper, a novel global optimization method-specular reflection algorithm (SRA) is proposed, which simulates the unique optical property of mirror-reflection function. Combining the computing features of the SRA with traditional mathematical theories, the global convergence ability of the SRA is verified. The reasonable value of the SRA's control parameter is analysed, so that the best control parameter which is suitable for current optimization problems can be acquired. Four numerical examples are researched using the SRA and other 4 classical intelligent optimization methods, such as particle swarm optimization, Kalman swarm optimization, etc. Simulation results of numerical examples demonstrated the effectiveness and superiority of the SRA, especially its suitability for solving high dimensional, multi-peak complex functions. Finally the structure of general bridge crane is investigated and designed by SRA for robust reliability optimization design. The results illustrate that the SRA is reasonable, accurate and can be treated as an effective analysis technique in reliability-based robust optimization design. It can be predicted that the SRA can be widely used in engineering for creating more value.

2017, 43(8): 1465-1469.
doi: 10.16383/j.aas.2017.e150066
摘要:
In this paper, we formulate and investigate a memristive neural networks with time-varying delays and synchronous switching. Conditions are derived which ensure the existence of an equilibrium point and uniform stability for state trajectories of the memristive neural network. The analysis in the paper employs results from the theory of Lyapunov function. Moreover, the proposed stability conditions are straightforward and convenient which can reflect the impact of time-varying delays on the stability. The simulation results demonstrate the effectiveness of the theoretical results.
In this paper, we formulate and investigate a memristive neural networks with time-varying delays and synchronous switching. Conditions are derived which ensure the existence of an equilibrium point and uniform stability for state trajectories of the memristive neural network. The analysis in the paper employs results from the theory of Lyapunov function. Moreover, the proposed stability conditions are straightforward and convenient which can reflect the impact of time-varying delays on the stability. The simulation results demonstrate the effectiveness of the theoretical results.
2017, 43(8): 1470-1477.
doi: 10.16383/j.aas.2017.c160292
摘要:
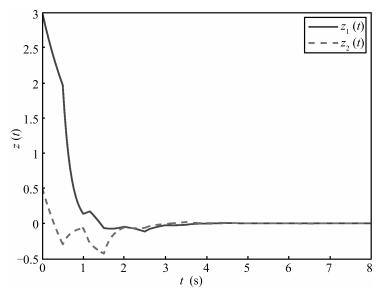
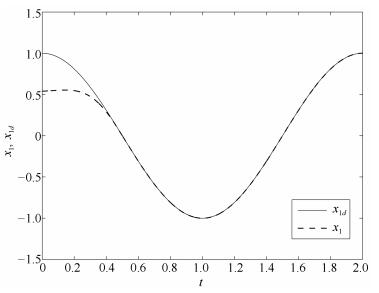
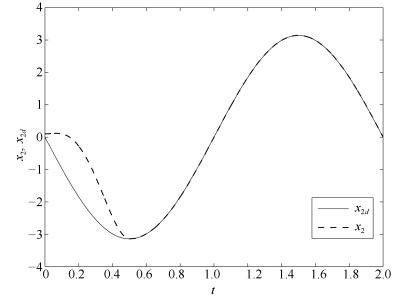
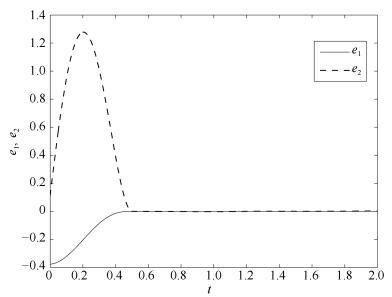
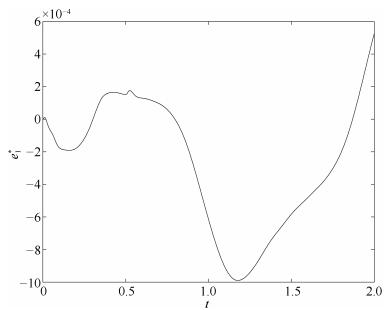
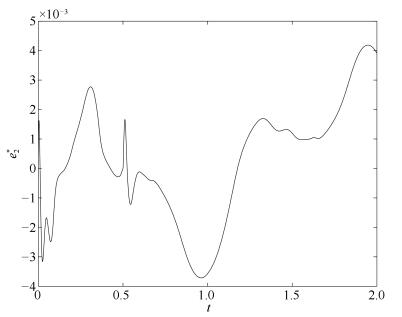
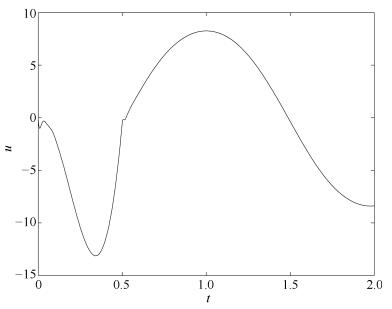
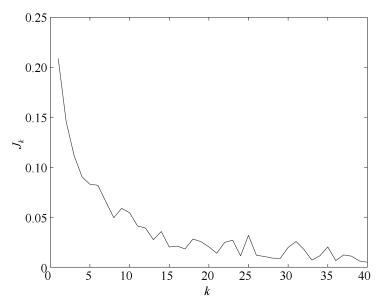
针对一类非参数不确定系统,提出状态受限迭代学习控制的参考信号初始修正方法,以解决任意初态下的状态受限轨迹跟踪问题.通过构造修正参考信号,利用一种新型的障碍Lyapunov函数设计迭代学习控制系统,采用鲁棒方法与学习方法相结合的策略处理非参数不确定性,经过足够多次迭代后,可实现系统状态在整个作业区间上对修正参考信号的零误差跟踪,以及在预设作业区间上对参考信号的零误差跟踪.同时,将滤波误差约束于预设的界内,并由此实现对系统状态在各次迭代运行过程中的约束.仿真结果表明了本文所提控制方法的有效性.
针对一类非参数不确定系统,提出状态受限迭代学习控制的参考信号初始修正方法,以解决任意初态下的状态受限轨迹跟踪问题.通过构造修正参考信号,利用一种新型的障碍Lyapunov函数设计迭代学习控制系统,采用鲁棒方法与学习方法相结合的策略处理非参数不确定性,经过足够多次迭代后,可实现系统状态在整个作业区间上对修正参考信号的零误差跟踪,以及在预设作业区间上对参考信号的零误差跟踪.同时,将滤波误差约束于预设的界内,并由此实现对系统状态在各次迭代运行过程中的约束.仿真结果表明了本文所提控制方法的有效性.

2017, 43(8): 1478-1484.
doi: 10.16383/j.aas.2017.c160401
摘要:
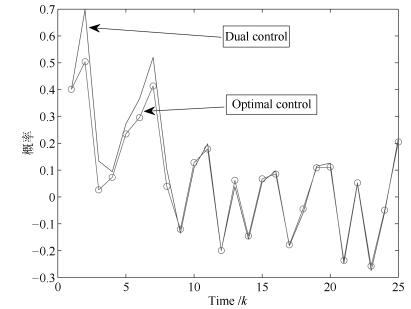
对于具有未知参数的LQG(Linear quadratic Gaussian)问题,提出了一种次优对偶控制方法,用Kalman滤波处理过程噪声和测量噪声,用前一时刻的后验概率对Cost-to-go进行线性近似,然后,用动态规划获得了次优控制律.最后,用一个例子说明了本文设计的控制器的实施过程.结果表明,该控制律具有良好的对偶性质,并能在学习和控制之间实现较好平衡.
对于具有未知参数的LQG(Linear quadratic Gaussian)问题,提出了一种次优对偶控制方法,用Kalman滤波处理过程噪声和测量噪声,用前一时刻的后验概率对Cost-to-go进行线性近似,然后,用动态规划获得了次优控制律.最后,用一个例子说明了本文设计的控制器的实施过程.结果表明,该控制律具有良好的对偶性质,并能在学习和控制之间实现较好平衡.