2019年 第45卷 第5期
2019, 45(5): 829-840.
doi: 10.16383/j.aas.c180436
cstr: 32138.14.j.aas.c180436
摘要:
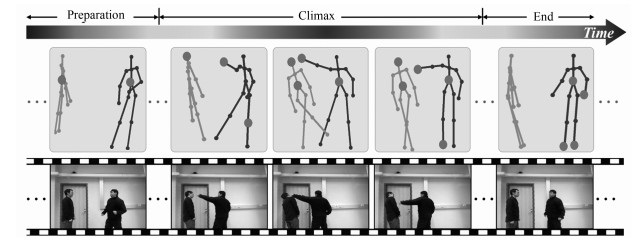
行为识别是计算机视觉领域很重要的一个研究问题,其在安全监控、机器人设计、无人驾驶和智能家庭设计等方面都有着非常重要的应用.基于传统RGB视频的行为识别方法由于容易受背景、光照等行为无关因素的影响,导致识别精度不高.廉价RGB-D摄像头出现之后,人们开始从一个新的途径解决行为识别问题.基于RGB-D摄像头的行为识别通过聚合RGB、深度和骨架三种模态的行为数据,可以融合不同模态的行为信息,从而可以克服传统RGB视频行为识别的缺陷,也因此成为近几年的一个研究热点.本文系统地综述了RGB-D行为识别领域的研究进展和展望.首先,对近年来RGB-D行为识别领域中常用的公共数据集进行简要的介绍;同时也系统地介绍了多模态RGB-D行为识别研究领域的典型模型和最新进展,其中包括卷积神经网络(Convolution neural network,CNN)和循环神经网络(Recurrent neural network,RNN)等深度学习技术在RGB-D行为识别的应用;最后,在三个公共RGB-D行为数据库上对现有方法的优缺点进行了比较和分析,并对未来的相关研究进行了展望.
行为识别是计算机视觉领域很重要的一个研究问题,其在安全监控、机器人设计、无人驾驶和智能家庭设计等方面都有着非常重要的应用.基于传统RGB视频的行为识别方法由于容易受背景、光照等行为无关因素的影响,导致识别精度不高.廉价RGB-D摄像头出现之后,人们开始从一个新的途径解决行为识别问题.基于RGB-D摄像头的行为识别通过聚合RGB、深度和骨架三种模态的行为数据,可以融合不同模态的行为信息,从而可以克服传统RGB视频行为识别的缺陷,也因此成为近几年的一个研究热点.本文系统地综述了RGB-D行为识别领域的研究进展和展望.首先,对近年来RGB-D行为识别领域中常用的公共数据集进行简要的介绍;同时也系统地介绍了多模态RGB-D行为识别研究领域的典型模型和最新进展,其中包括卷积神经网络(Convolution neural network,CNN)和循环神经网络(Recurrent neural network,RNN)等深度学习技术在RGB-D行为识别的应用;最后,在三个公共RGB-D行为数据库上对现有方法的优缺点进行了比较和分析,并对未来的相关研究进行了展望.




2019, 45(5): 841-852.
doi: 10.16383/j.aas.2018.c170559
cstr: 32138.14.j.aas.2018.c170559
摘要:
步态识别作为生物特征识别中的一种,具有远距离、非接触和难以模仿等优点.其中视角或行走方向的变化使提取的人体轮廓产生巨大差异,是影响步态识别系统性能的最主要因素之一.本文首先介绍了现有的多角度步态数据库,然后根据特征提取方式的不同,将当前已提出的方法分为三维模型法、视角不变性特征法、映射投影法和深度神经网络法四类,并详细阐述了每一类的原理、特点以及优缺点.最后,结合实际应用指出当前研究的局限性与发展趋势.
步态识别作为生物特征识别中的一种,具有远距离、非接触和难以模仿等优点.其中视角或行走方向的变化使提取的人体轮廓产生巨大差异,是影响步态识别系统性能的最主要因素之一.本文首先介绍了现有的多角度步态数据库,然后根据特征提取方式的不同,将当前已提出的方法分为三维模型法、视角不变性特征法、映射投影法和深度神经网络法四类,并详细阐述了每一类的原理、特点以及优缺点.最后,结合实际应用指出当前研究的局限性与发展趋势.

2019, 45(5): 853-865.
doi: 10.16383/j.aas.c180047
cstr: 32138.14.j.aas.c180047
摘要:
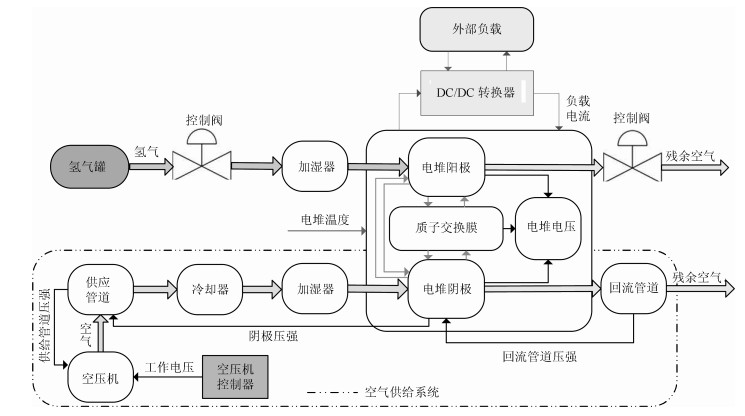
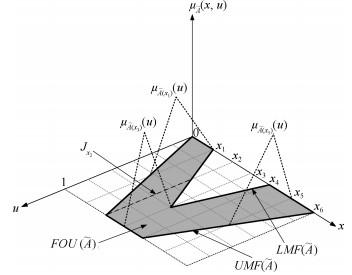
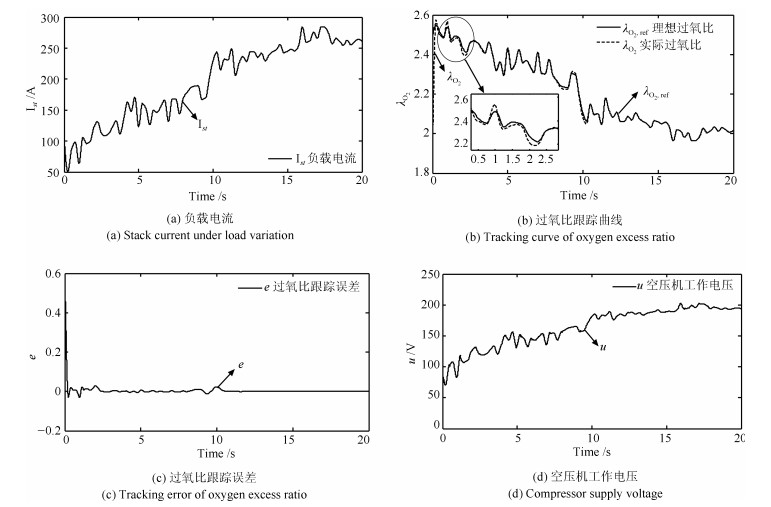
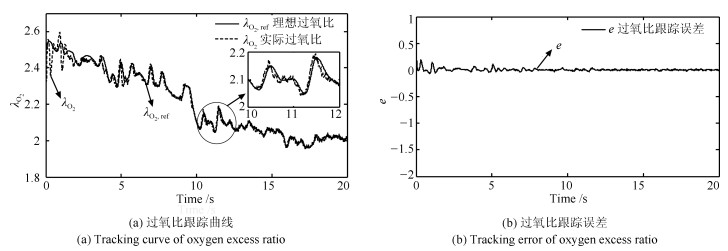
质子交换膜燃料电池(Proton exchange membrane fuel cell,PEMFC)空气供给系统存在外部扰动和参数不确定等动态特性,难以实现精准建模和控制.本文结合精确线性化和二型模糊逻辑系统,提出一种自适应控制器实现PEMFC空气供给系统的建模与过氧比控制.该控制器不需要PEMFC空气供给系统模型结构和参数完全已知的条件,而是通过二型模糊逻辑系统在线逼近PEMFC空气供给系统中的未建模动态并从Lyapunov函数中导出自适应参数,从而保证系统收敛性与稳定性.通过稳定性分析证明了该控制器作用下系统跟踪误差的有界性,仿真实验进一步验证了该控制器的有效性与实用性.
质子交换膜燃料电池(Proton exchange membrane fuel cell,PEMFC)空气供给系统存在外部扰动和参数不确定等动态特性,难以实现精准建模和控制.本文结合精确线性化和二型模糊逻辑系统,提出一种自适应控制器实现PEMFC空气供给系统的建模与过氧比控制.该控制器不需要PEMFC空气供给系统模型结构和参数完全已知的条件,而是通过二型模糊逻辑系统在线逼近PEMFC空气供给系统中的未建模动态并从Lyapunov函数中导出自适应参数,从而保证系统收敛性与稳定性.通过稳定性分析证明了该控制器作用下系统跟踪误差的有界性,仿真实验进一步验证了该控制器的有效性与实用性.




2019, 45(5): 866-876.
doi: 10.16383/j.aas.2018.c170156
cstr: 32138.14.j.aas.2018.c170156
摘要:
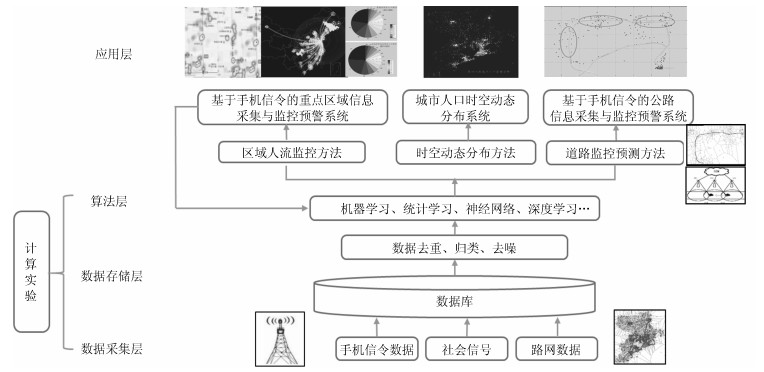
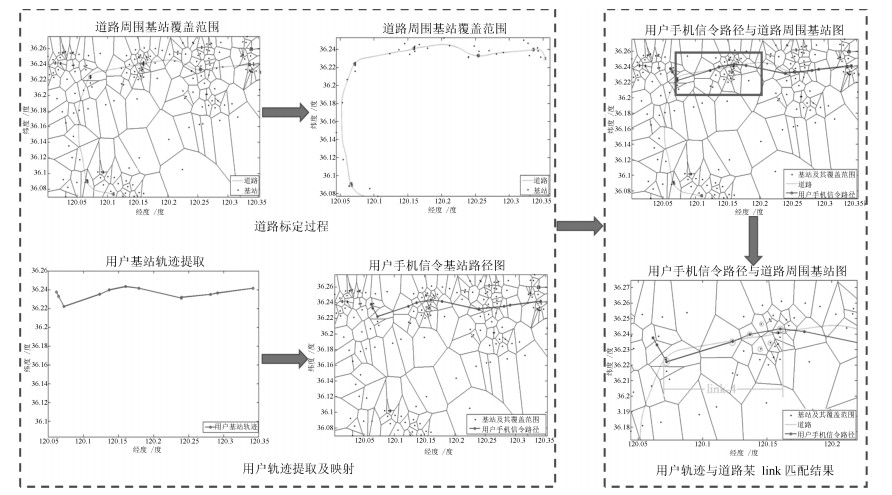
随着交通拥堵和公共安全问题的日趋严重,传统方案在道路监测和区域监测方面不仅成本高,准确性和可靠性也无法保证,因此无法给用户提供一整套综合全面的出行路线规划及旅游目的地选择等方面的相关指导.本文提出基于ACP方法的平行手机信令数据分析系统,将解决上述问题.本文主要基于ACP方法,包括人工社会、计算实验和平行执行,构建基于手机信令的人工监控场景和实际监控场景.实际监控场景和人工监控场景平行执行,人工监控场景用来模拟和实验复杂的实际监控场景,通过大量计算实验,进行各种模型的训练与评估,通过平行执行不断地更新和优化,实时指导实际监控场景;同时实际监控场景将结果反馈给人工监控场景,对人工监控场景模型进行修正.通过实际监控场景和人工监控场景之间的不断优化,可有效提高手机信令系统的实时性、准确性和可靠性,并最终满足不断增长的实时用户需求,保证用户出行的舒适性及安全性.
随着交通拥堵和公共安全问题的日趋严重,传统方案在道路监测和区域监测方面不仅成本高,准确性和可靠性也无法保证,因此无法给用户提供一整套综合全面的出行路线规划及旅游目的地选择等方面的相关指导.本文提出基于ACP方法的平行手机信令数据分析系统,将解决上述问题.本文主要基于ACP方法,包括人工社会、计算实验和平行执行,构建基于手机信令的人工监控场景和实际监控场景.实际监控场景和人工监控场景平行执行,人工监控场景用来模拟和实验复杂的实际监控场景,通过大量计算实验,进行各种模型的训练与评估,通过平行执行不断地更新和优化,实时指导实际监控场景;同时实际监控场景将结果反馈给人工监控场景,对人工监控场景模型进行修正.通过实际监控场景和人工监控场景之间的不断优化,可有效提高手机信令系统的实时性、准确性和可靠性,并最终满足不断增长的实时用户需求,保证用户出行的舒适性及安全性.





2019, 45(5): 877-887.
doi: 10.16383/j.aas.2018.c170607
cstr: 32138.14.j.aas.2018.c170607
摘要:
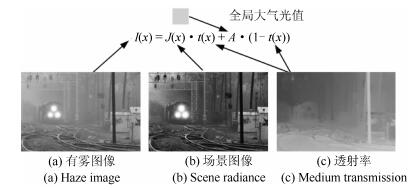
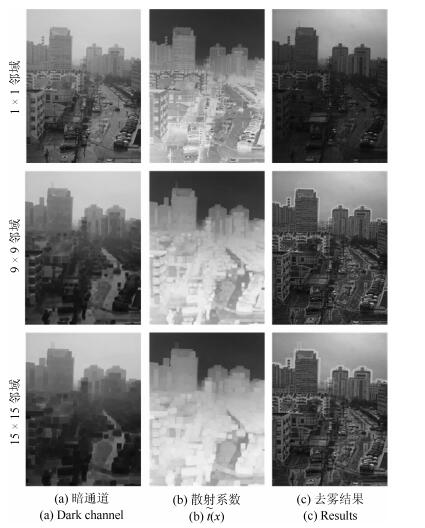
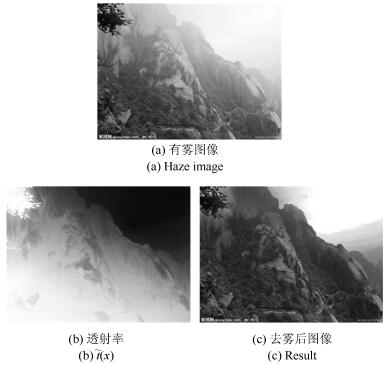
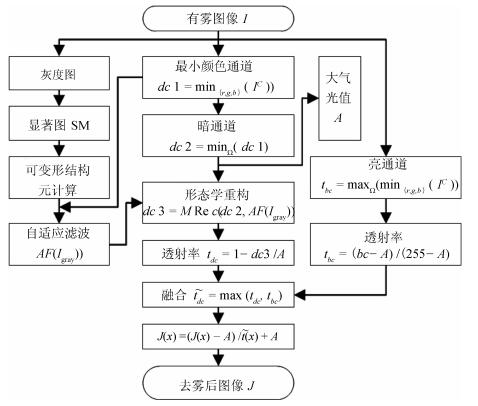
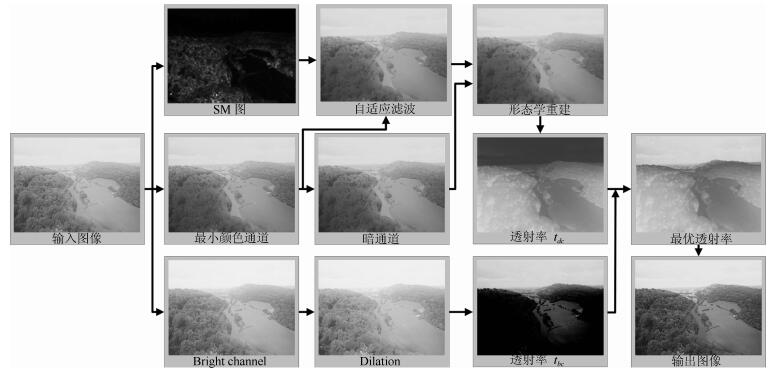
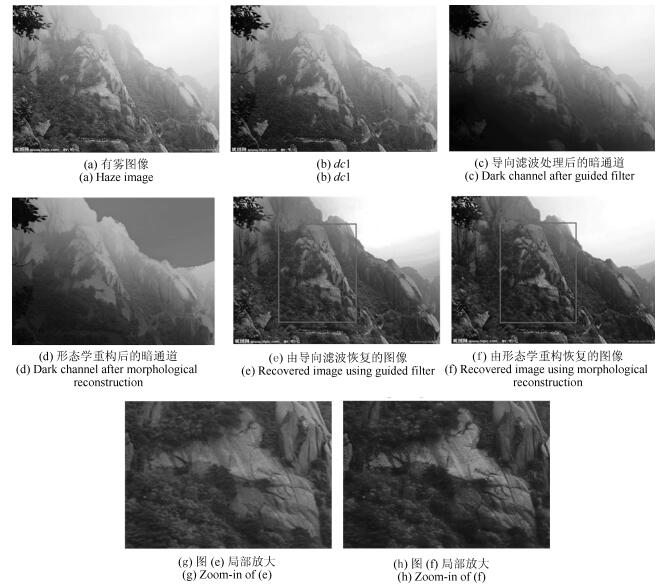
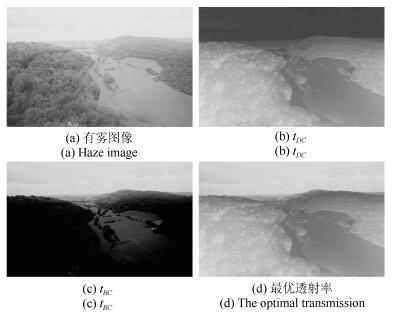
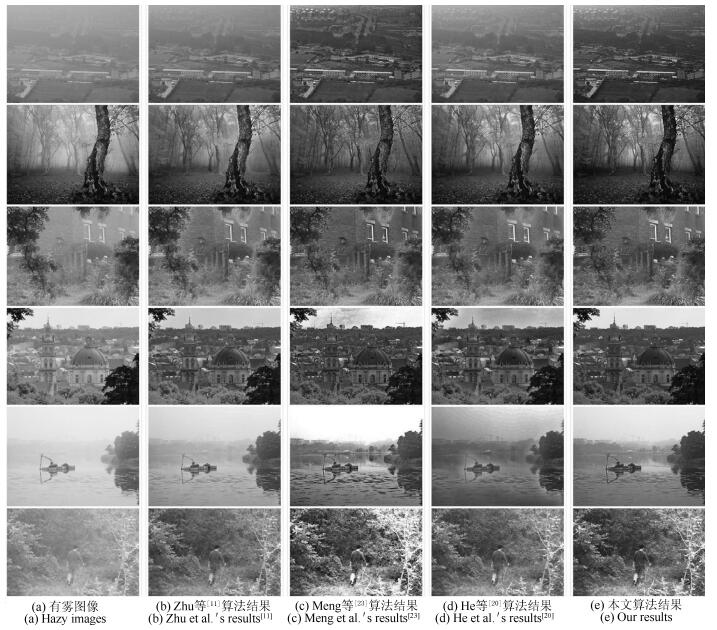
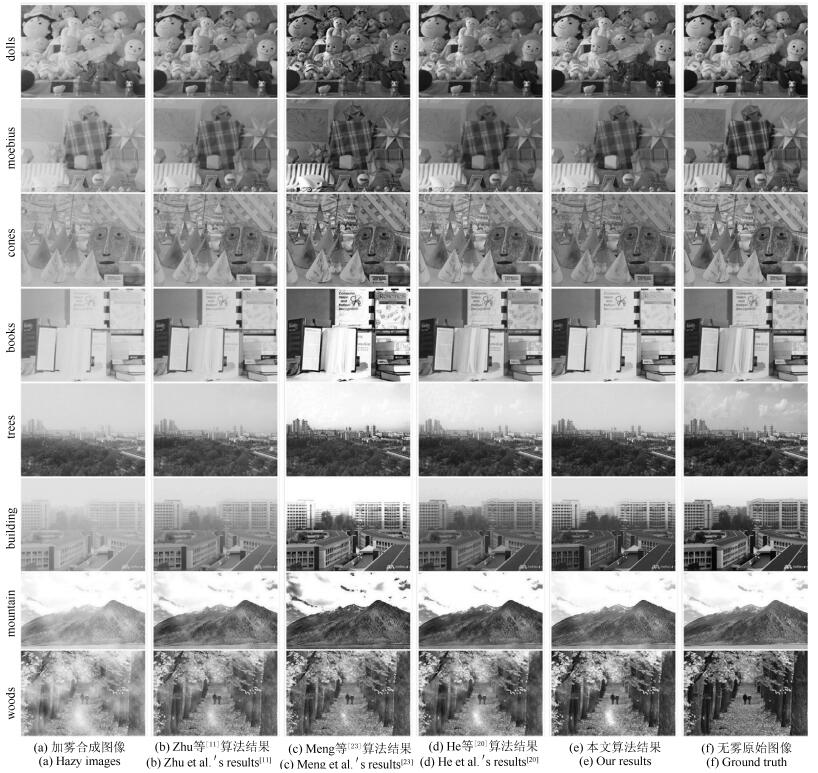
针对暗通道先验去雾中存在的光晕现象和天空区域颜色失真现象,提出了一种基于自适应可变形结构元(Adaptive deformable structuring element,ADSE)中值滤波结合灰度形态学重构精细化透射率的方法.该方法利用透射率与图像细纹理结构的无关性,由有雾图像的灰度图计算显著图(Salience map,SM),将SM作为导向图计算ADSE,用生成的ADSE对最小颜色通道图像进行自适应中值滤波运算;其次,以粗估计暗通道图像为标记图像,以自适应中值滤波后的图像作为模板图像进行灰度形态学重构运算,获得精细化暗通道图像,继而得到精细化透射率;最后,针对天空区域,引入最优化透射率方法,对天空和非天空区域做统一的运算得到最终透射率,完成图像去雾.本文算法对真实场景具有很好的去雾效果,同时,基于形态学的运算易于并行化和硬件实现.
针对暗通道先验去雾中存在的光晕现象和天空区域颜色失真现象,提出了一种基于自适应可变形结构元(Adaptive deformable structuring element,ADSE)中值滤波结合灰度形态学重构精细化透射率的方法.该方法利用透射率与图像细纹理结构的无关性,由有雾图像的灰度图计算显著图(Salience map,SM),将SM作为导向图计算ADSE,用生成的ADSE对最小颜色通道图像进行自适应中值滤波运算;其次,以粗估计暗通道图像为标记图像,以自适应中值滤波后的图像作为模板图像进行灰度形态学重构运算,获得精细化暗通道图像,继而得到精细化透射率;最后,针对天空区域,引入最优化透射率方法,对天空和非天空区域做统一的运算得到最终透射率,完成图像去雾.本文算法对真实场景具有很好的去雾效果,同时,基于形态学的运算易于并行化和硬件实现.




2019, 45(5): 888-896.
doi: 10.16383/j.aas.c170442
cstr: 32138.14.j.aas.c170442
摘要:
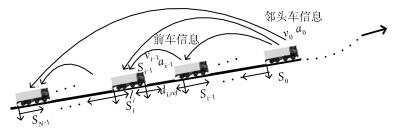
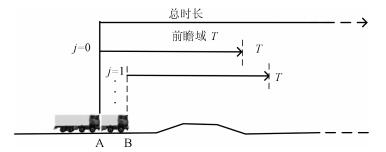
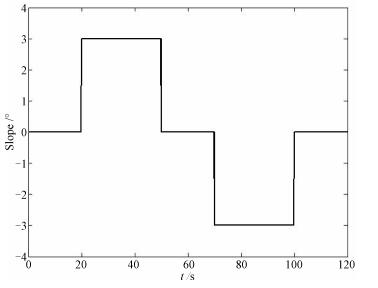
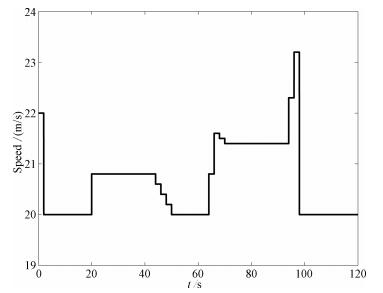
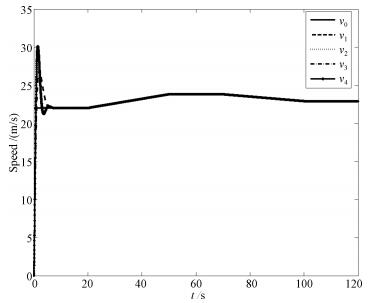
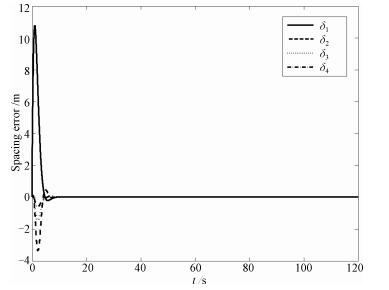
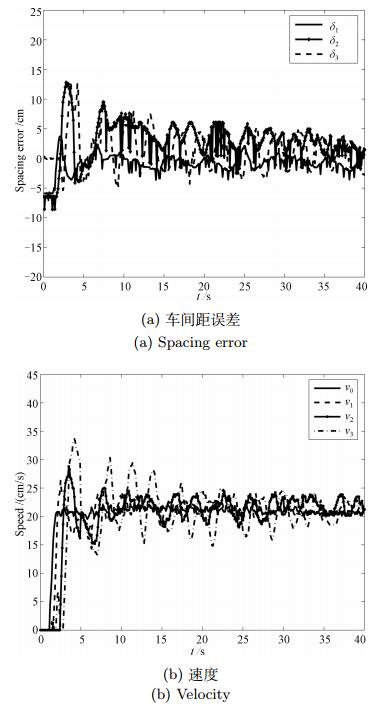
考虑自主车辆队列的节能安全问题,本文提出一种车辆队列协同控制方法,该方法可保证车队低能耗安全行驶.首先,充分考虑道路坡度以及车队异质性建立车队非线性模型,利用基于油耗模型的优化指标构建车队速度优化问题,提出一种滚动时域动态规划算法(Receding horizon dynamic programming,RHDP),获得车队的参考速度.然后,基于非线性车辆模型,运用反步法设计车辆跟踪控制器,并进行车队队列稳定性分析.这种协同控制方法的有效性已通过数值仿真和智能交通实验平台的验证.
考虑自主车辆队列的节能安全问题,本文提出一种车辆队列协同控制方法,该方法可保证车队低能耗安全行驶.首先,充分考虑道路坡度以及车队异质性建立车队非线性模型,利用基于油耗模型的优化指标构建车队速度优化问题,提出一种滚动时域动态规划算法(Receding horizon dynamic programming,RHDP),获得车队的参考速度.然后,基于非线性车辆模型,运用反步法设计车辆跟踪控制器,并进行车队队列稳定性分析.这种协同控制方法的有效性已通过数值仿真和智能交通实验平台的验证.




2019, 45(5): 897-905.
doi: 10.16383/j.aas.c180302
cstr: 32138.14.j.aas.c180302
摘要:
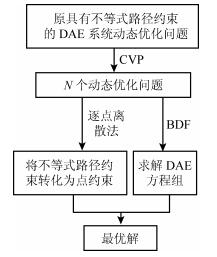
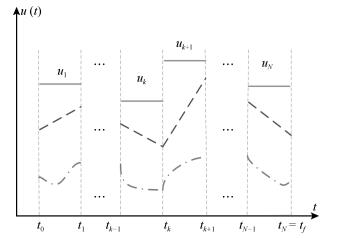
针对具有不等式路径约束的微分代数方程(Differential-algebraic equations,DAE)系统的动态优化问题,通常将DAE中的等式路径约束进行微分处理,或者将其转化为点约束或不等式约束进行求解.前者需要考虑初值条件的相容性或增加约束,在变量间耦合度较高的情况下这种转化求解方法是不可行的;后者将等式约束转化为其他类型的约束会增加约束条件,增加了求解难度.为了克服该缺点,本文提出了结合后向差分法对DAE直接处理来求解上述动态优化问题的方法.首先利用控制向量参数化方法将无限维的最优控制问题转化为有限维的最优控制问题,再利用分点离散法用有限个内点约束去代替原不等式路径约束,最后用序列二次规划(Sequential quadratic programming,SQP)法使得在有限步数的迭代下,得到满足用户指定的路径约束违反容忍度下的KKT(Karush Kuhn Tucker)最优点.理论上证明了该算法在有限步内收敛.最后将所提出的方法应用在具有不等式路径约束的微分代数方程系统中进行仿真,结果验证了该方法的有效性.
针对具有不等式路径约束的微分代数方程(Differential-algebraic equations,DAE)系统的动态优化问题,通常将DAE中的等式路径约束进行微分处理,或者将其转化为点约束或不等式约束进行求解.前者需要考虑初值条件的相容性或增加约束,在变量间耦合度较高的情况下这种转化求解方法是不可行的;后者将等式约束转化为其他类型的约束会增加约束条件,增加了求解难度.为了克服该缺点,本文提出了结合后向差分法对DAE直接处理来求解上述动态优化问题的方法.首先利用控制向量参数化方法将无限维的最优控制问题转化为有限维的最优控制问题,再利用分点离散法用有限个内点约束去代替原不等式路径约束,最后用序列二次规划(Sequential quadratic programming,SQP)法使得在有限步数的迭代下,得到满足用户指定的路径约束违反容忍度下的KKT(Karush Kuhn Tucker)最优点.理论上证明了该算法在有限步内收敛.最后将所提出的方法应用在具有不等式路径约束的微分代数方程系统中进行仿真,结果验证了该方法的有效性.




2019, 45(5): 906-919.
doi: 10.16383/j.aas.2018.c170497
cstr: 32138.14.j.aas.2018.c170497
摘要:
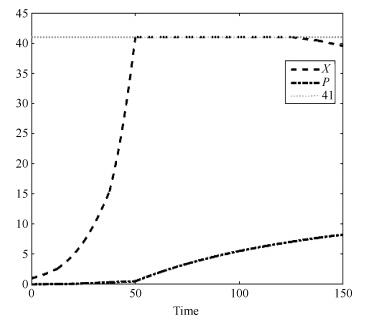
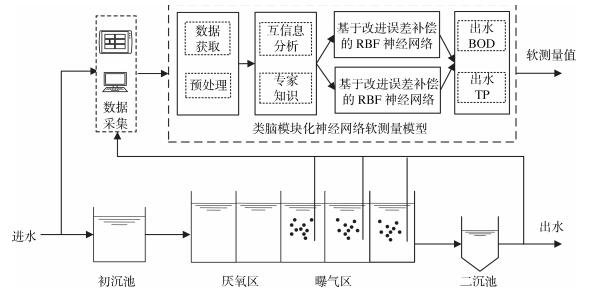
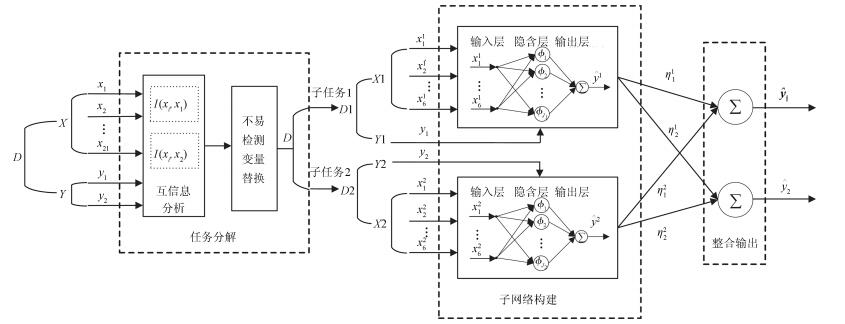
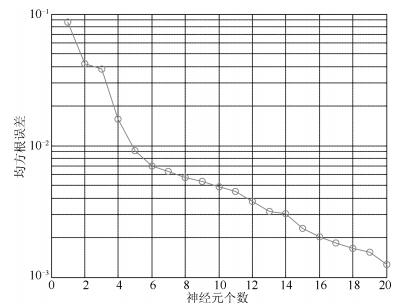
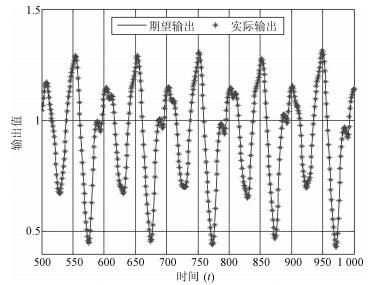
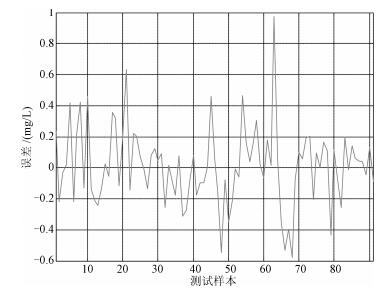
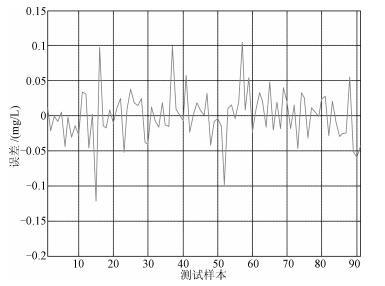
针对城市污水处理过程关键出水参数难以实时检测的问题,文中提出了一种基于类脑模块化神经网络(Brain-like modular neural network,BLMNN)的关键出水参数软测量方法.首先,基于互信息和专家知识进行任务分解,分析关键出水参数的相关变量,获取各出水参数的辅助变量.其次,通过模拟大脑皮层模块化分区结构,构建软测量子模型对各水质参数进行同步测量,降低软测量模型复杂度的同时保证了其精度.最后,通过基于实际数据的仿真实验验证了所提出方法的准确性和有效性.
针对城市污水处理过程关键出水参数难以实时检测的问题,文中提出了一种基于类脑模块化神经网络(Brain-like modular neural network,BLMNN)的关键出水参数软测量方法.首先,基于互信息和专家知识进行任务分解,分析关键出水参数的相关变量,获取各出水参数的辅助变量.其次,通过模拟大脑皮层模块化分区结构,构建软测量子模型对各水质参数进行同步测量,降低软测量模型复杂度的同时保证了其精度.最后,通过基于实际数据的仿真实验验证了所提出方法的准确性和有效性.






2019, 45(5): 920-926.
doi: 10.16383/j.aas.2018.c170457
cstr: 32138.14.j.aas.2018.c170457
摘要:
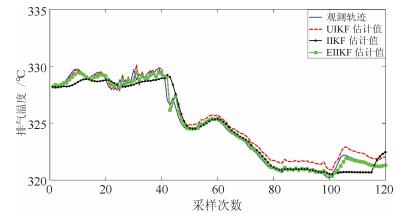
船舶柴油机作为大多数船舶的动力源泉,具有十分重要的地位,其健康状态直接影响了船舶的稳定运行.由于船舶柴油机具有工作环境复杂且工况多变的特点,不利于传统故障预测方法的应用.本文提出了一种增强型间歇性未知输入卡尔曼滤波器,可以有效降低建模的复杂度,应对具有不同的工作状态的参数预测.最后本文提出并使用改进的序贯概率比检验进行残差处理,减小故障误报.仿真结果表明,该方法可以较好地对船舶柴油机系统故障进行预测.
船舶柴油机作为大多数船舶的动力源泉,具有十分重要的地位,其健康状态直接影响了船舶的稳定运行.由于船舶柴油机具有工作环境复杂且工况多变的特点,不利于传统故障预测方法的应用.本文提出了一种增强型间歇性未知输入卡尔曼滤波器,可以有效降低建模的复杂度,应对具有不同的工作状态的参数预测.最后本文提出并使用改进的序贯概率比检验进行残差处理,减小故障误报.仿真结果表明,该方法可以较好地对船舶柴油机系统故障进行预测.



2019, 45(5): 927-940.
doi: 10.16383/j.aas.2018.c170401
cstr: 32138.14.j.aas.2018.c170401
摘要:
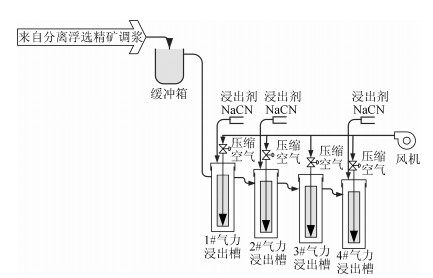
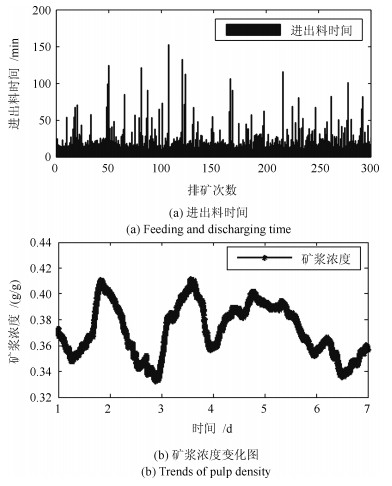
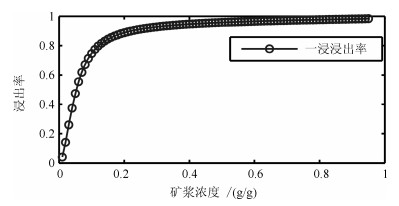
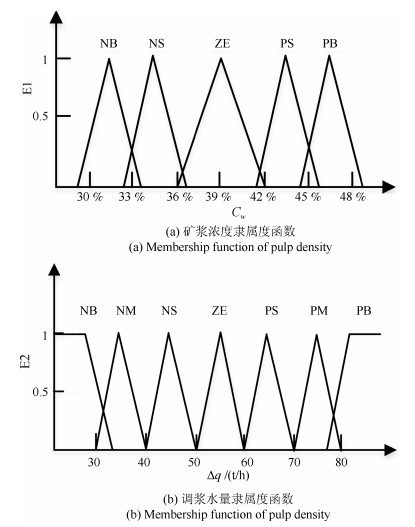
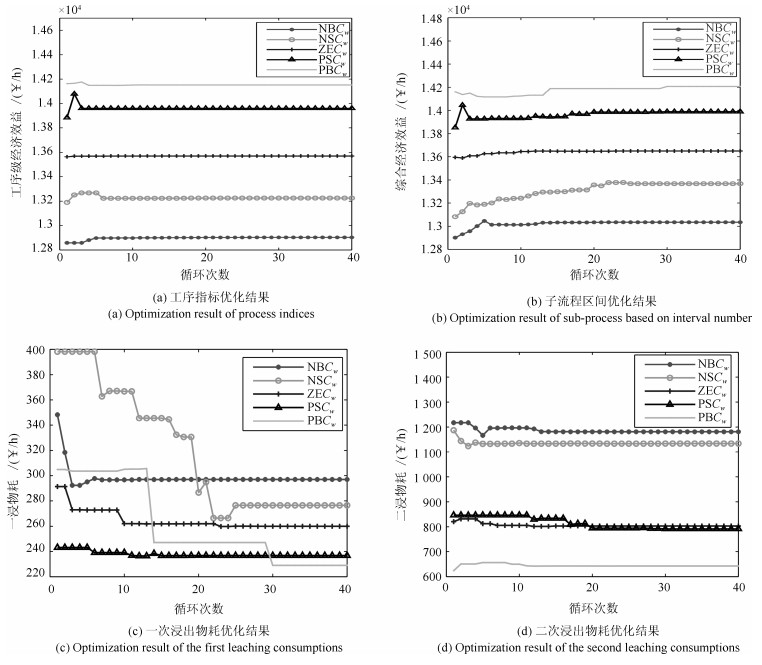
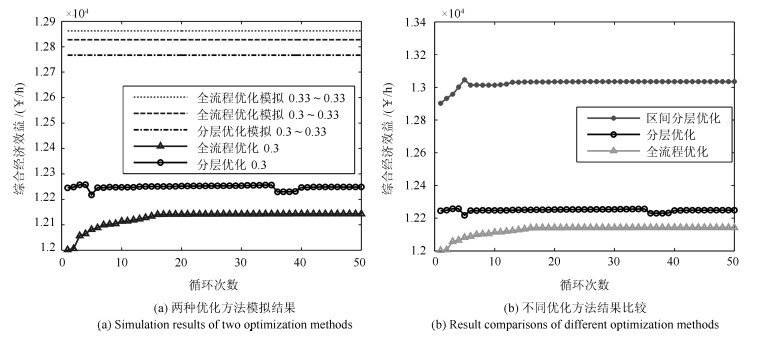
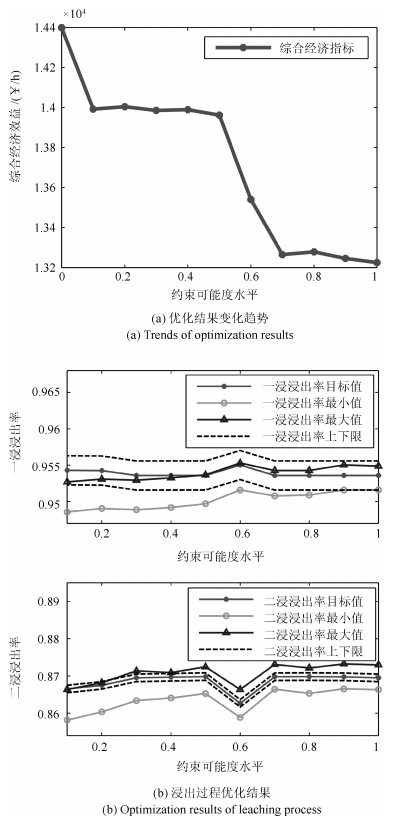
针对黄金湿法冶炼生产过程中某些关键变量不能准确在线测量,导致局部工序无法定量建模、难以基于定量模型实现过程优化控制的问题,提出一种基于区间数的过程分层优化方法.在对黄金湿法冶炼生产过程特点进行分析的基础上,提出了基于区间数的过程分层优化框架.基于专家知识和现场操作人员经验等信息,建立了调浆过程的模糊定性模型.结合氰化浸出和置换等工序的定量模型及调浆过程的定性模型,建立了以综合经济效益最大为优化目标的黄金湿法冶炼生产过程优化模型.针对模糊定性模型的每一输出模态,利用区间数代替无法检测关键变量,提出了基于区间优化和分层优化思想相结合的优化方法,实现了黄金湿法冶炼过程的优化.与传统全流程优化方法的仿真对比实验表明,所提方法在具有不确定性的流程工业生产过程优化中具有一定的应用价值.
针对黄金湿法冶炼生产过程中某些关键变量不能准确在线测量,导致局部工序无法定量建模、难以基于定量模型实现过程优化控制的问题,提出一种基于区间数的过程分层优化方法.在对黄金湿法冶炼生产过程特点进行分析的基础上,提出了基于区间数的过程分层优化框架.基于专家知识和现场操作人员经验等信息,建立了调浆过程的模糊定性模型.结合氰化浸出和置换等工序的定量模型及调浆过程的定性模型,建立了以综合经济效益最大为优化目标的黄金湿法冶炼生产过程优化模型.针对模糊定性模型的每一输出模态,利用区间数代替无法检测关键变量,提出了基于区间优化和分层优化思想相结合的优化方法,实现了黄金湿法冶炼过程的优化.与传统全流程优化方法的仿真对比实验表明,所提方法在具有不确定性的流程工业生产过程优化中具有一定的应用价值.



2019, 45(5): 941-952.
doi: 10.16383/j.aas.2018.c170027
cstr: 32138.14.j.aas.2018.c170027
摘要:
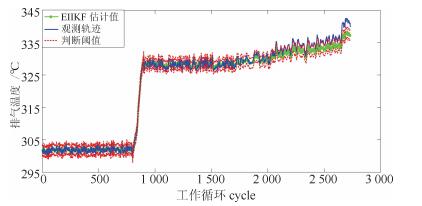
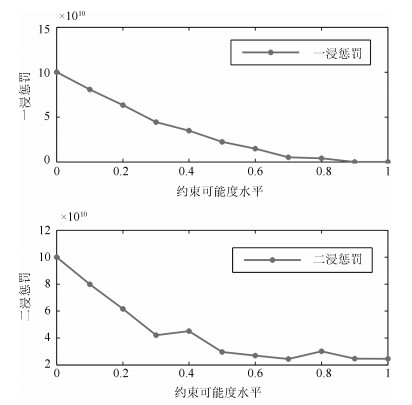
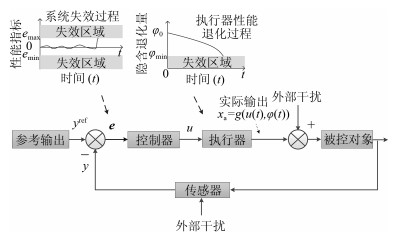
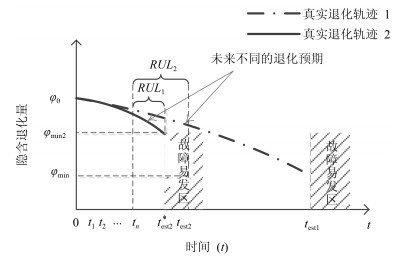
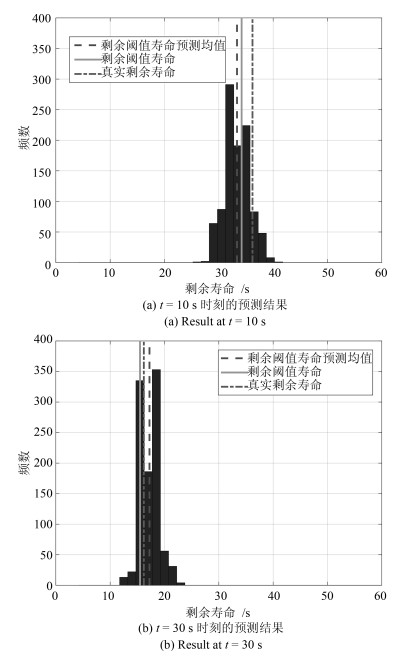
工程控制系统在运行过程中,由于内外部应力的综合作用以及外部环境等的影响,其部件性能将逐渐退化,最终会导致控制系统失效.然而,由于控制系统中闭环反馈的作用,系统的输出残差可能仍在较小范围内变动,使得早期性能退化这种微小故障难以被检测到,呈现隐含退化的特点.现有文献中,针对此类在闭环反馈控制作用下部件存在隐含退化过程的控制系统剩余寿命(Remaining useful lifetime,RUL)预测问题,鲜有研究.为此,本文针对一类仅考虑执行器性能退化的确定闭环控制系统,提出一种基于解析模型的剩余寿命预测方法.该方法首先基于权值优选粒子滤波算法,利用系统的监测数据在线估计出执行器的隐含退化量,然后在每一个预测时刻通过蒙特卡洛(Monte Carlo,MC)仿真计算得到合理的失效阈值,建立基于该失效阈值的系统失效判断准则,最后将隐含退化量的估计值代入退化模型中外推出剩余寿命分布.惯性平台稳定回路控制系统的仿真实验结果验证了该方法的可行性、有效性.
工程控制系统在运行过程中,由于内外部应力的综合作用以及外部环境等的影响,其部件性能将逐渐退化,最终会导致控制系统失效.然而,由于控制系统中闭环反馈的作用,系统的输出残差可能仍在较小范围内变动,使得早期性能退化这种微小故障难以被检测到,呈现隐含退化的特点.现有文献中,针对此类在闭环反馈控制作用下部件存在隐含退化过程的控制系统剩余寿命(Remaining useful lifetime,RUL)预测问题,鲜有研究.为此,本文针对一类仅考虑执行器性能退化的确定闭环控制系统,提出一种基于解析模型的剩余寿命预测方法.该方法首先基于权值优选粒子滤波算法,利用系统的监测数据在线估计出执行器的隐含退化量,然后在每一个预测时刻通过蒙特卡洛(Monte Carlo,MC)仿真计算得到合理的失效阈值,建立基于该失效阈值的系统失效判断准则,最后将隐含退化量的估计值代入退化模型中外推出剩余寿命分布.惯性平台稳定回路控制系统的仿真实验结果验证了该方法的可行性、有效性.



2019, 45(5): 953-964.
doi: 10.16383/j.aas.c170691
cstr: 32138.14.j.aas.c170691
摘要:
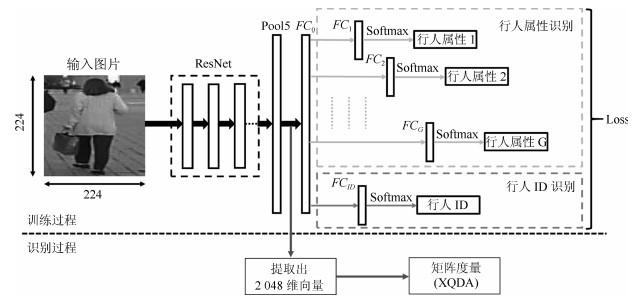
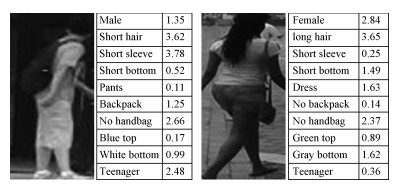
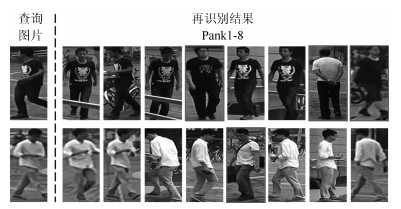
为了提高基于深度学习和属性学习的行人再识别的识别精度,提出一种联合识别行人属性和行人ID的神经网络模型.相对于已有的同类方法,该模型有三大优点:1)为了提高网络在微调后的判别能力,在网络中增加了一层保证模型迁移能力的全连接层;2)基于各属性样本的数量,在损失函数中对各属性的损失进行了归一化处理,避免数据集中属性类之间的数量不均衡对识别效果的影响;3)利用数据中各属性分布的先验知识,通过数量占比来调整各属性在损失层中的权重,避免数据集中各属性正负样本的数量不均衡对识别的影响.实验结果表明,本文提出的算法具有较高的识别率,其中在Market1501数据集上,首位匹配率达到了86.90%,在DukeMTMC数据集上,首位匹配率达到了72.83%,在PETA数据集上,首位匹配率达到了75.68%,且对光照变化、行人姿态变化、视角变化和遮挡都具有很好的鲁棒性.
为了提高基于深度学习和属性学习的行人再识别的识别精度,提出一种联合识别行人属性和行人ID的神经网络模型.相对于已有的同类方法,该模型有三大优点:1)为了提高网络在微调后的判别能力,在网络中增加了一层保证模型迁移能力的全连接层;2)基于各属性样本的数量,在损失函数中对各属性的损失进行了归一化处理,避免数据集中属性类之间的数量不均衡对识别效果的影响;3)利用数据中各属性分布的先验知识,通过数量占比来调整各属性在损失层中的权重,避免数据集中各属性正负样本的数量不均衡对识别的影响.实验结果表明,本文提出的算法具有较高的识别率,其中在Market1501数据集上,首位匹配率达到了86.90%,在DukeMTMC数据集上,首位匹配率达到了72.83%,在PETA数据集上,首位匹配率达到了75.68%,且对光照变化、行人姿态变化、视角变化和遮挡都具有很好的鲁棒性.


2019, 45(5): 965-974.
doi: 10.16383/j.aas.c180682
cstr: 32138.14.j.aas.c180682
摘要:
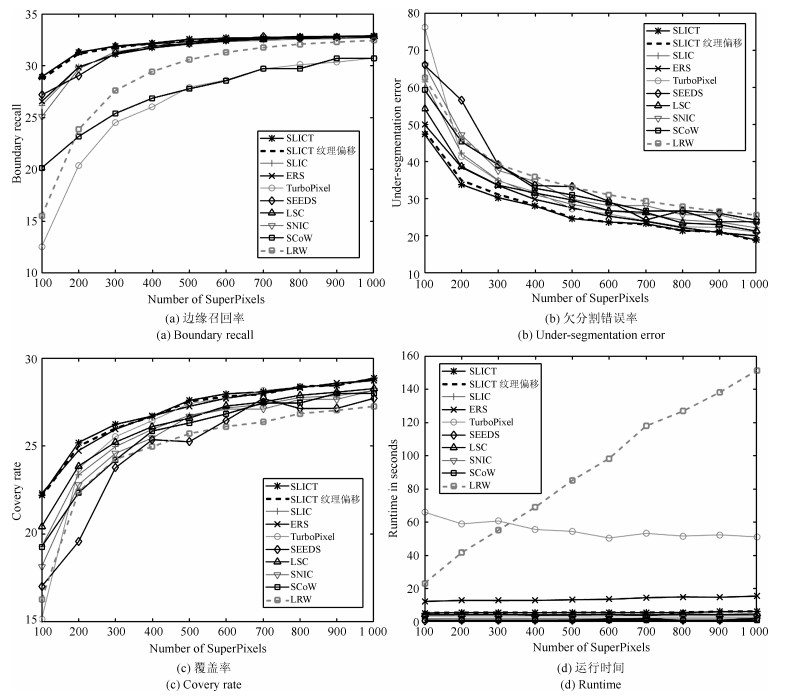
随着超像素算法的发展,SLIC(Simple linear iterative clustering)由于时间复杂度低及良好的分割结果而被广泛关注.但是由于传统的SLIC算法并没有考虑到图像的纹理信息,故而对于纹理较复杂的图像分割效果略有不足.LBP(Local binary pattern)对于纹理的识别有着优秀的表现而且时间复杂度低,但是对于噪声的鲁棒性较差,并且会产生纹理偏移.因此,本文首先针对传统的LBP中存在的问题进行改进;然后将改进后的算法与SLIC结合,提出一种融合纹理信息的超像素算法——SLICT(Simple linear iterative clustering based on texture).为验证分割效果,本文选取纹理较多的医学图像进行实验,采用心脏MRI数据库进行验证并与其他超像素算法进行对比.实验表明,SLICT在边缘召回率、欠分割错误率以及覆盖率上的综合表现优于其他算法.从分割结果上来看,SLICT不但能够更好地贴合图像边缘,而且对于连续区域的分割效果也较好,更适合纹理较复杂的图像.
随着超像素算法的发展,SLIC(Simple linear iterative clustering)由于时间复杂度低及良好的分割结果而被广泛关注.但是由于传统的SLIC算法并没有考虑到图像的纹理信息,故而对于纹理较复杂的图像分割效果略有不足.LBP(Local binary pattern)对于纹理的识别有着优秀的表现而且时间复杂度低,但是对于噪声的鲁棒性较差,并且会产生纹理偏移.因此,本文首先针对传统的LBP中存在的问题进行改进;然后将改进后的算法与SLIC结合,提出一种融合纹理信息的超像素算法——SLICT(Simple linear iterative clustering based on texture).为验证分割效果,本文选取纹理较多的医学图像进行实验,采用心脏MRI数据库进行验证并与其他超像素算法进行对比.实验表明,SLICT在边缘召回率、欠分割错误率以及覆盖率上的综合表现优于其他算法.从分割结果上来看,SLICT不但能够更好地贴合图像边缘,而且对于连续区域的分割效果也较好,更适合纹理较复杂的图像.



2019, 45(5): 975-984.
doi: 10.16383/j.aas.c170669
cstr: 32138.14.j.aas.c170669
摘要:
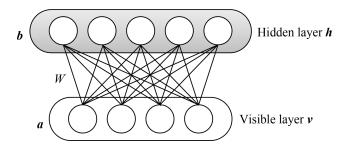
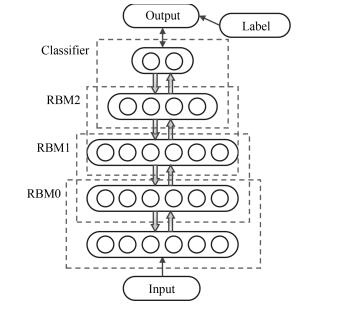
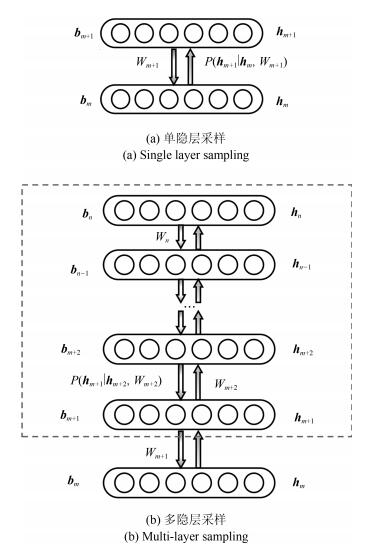
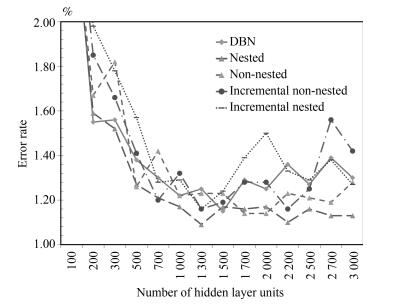
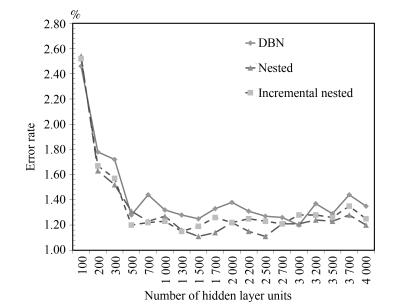
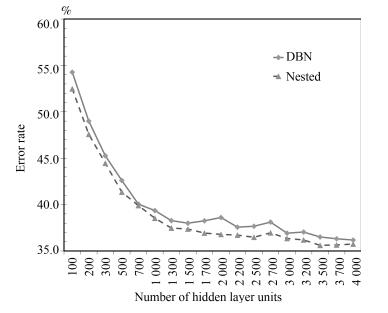
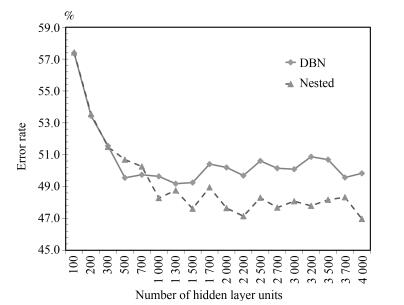
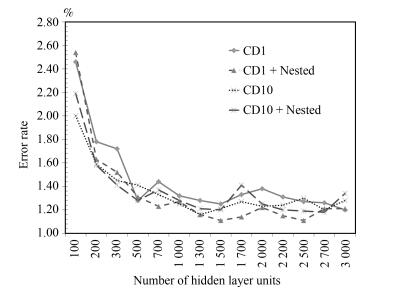
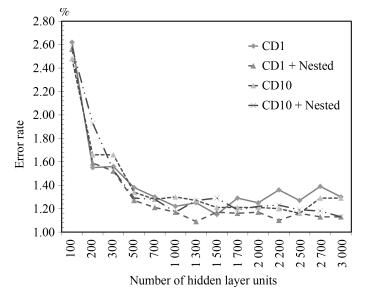
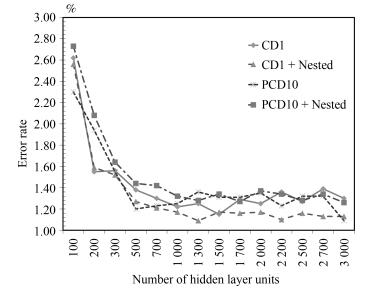
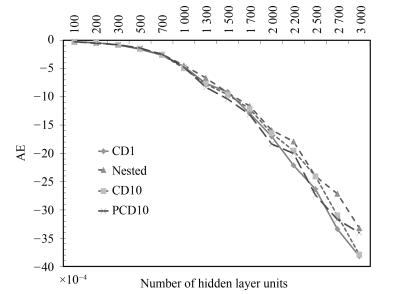
深度信念网络(Deep belief network,DBN)作为一类非常重要的概率生成模型,在多个领域都有着广泛的用途.现有深度信念网的训练分为两个阶段,首先是对受限玻尔兹曼机(Restricted Boltzmann machine,RBM)层自底向上逐层进行的贪婪预训练,使得每层的重构误差最小,这个阶段是无监督的;随后再对整体的权值使用有监督的反向传播方法进行精调.本文提出了一种新的DBN训练方法,通过多隐层的Gibbs采样,将局部RBM层组合,并在原有的逐层预训练和整体精调之间进行额外的预训练,有效地提高了DBN的精度.本文同时比较了多种隐层的组合方式,在MNIST和ShapeSet以及Cifar10数据集上的实验表明,使用两两嵌套组合方式比传统的方法错误率更低.新的训练方法可以在更少的神经元上获得比以往的训练方法更好的准确度,有着更高的算法效率.
深度信念网络(Deep belief network,DBN)作为一类非常重要的概率生成模型,在多个领域都有着广泛的用途.现有深度信念网的训练分为两个阶段,首先是对受限玻尔兹曼机(Restricted Boltzmann machine,RBM)层自底向上逐层进行的贪婪预训练,使得每层的重构误差最小,这个阶段是无监督的;随后再对整体的权值使用有监督的反向传播方法进行精调.本文提出了一种新的DBN训练方法,通过多隐层的Gibbs采样,将局部RBM层组合,并在原有的逐层预训练和整体精调之间进行额外的预训练,有效地提高了DBN的精度.本文同时比较了多种隐层的组合方式,在MNIST和ShapeSet以及Cifar10数据集上的实验表明,使用两两嵌套组合方式比传统的方法错误率更低.新的训练方法可以在更少的神经元上获得比以往的训练方法更好的准确度,有着更高的算法效率.

2019, 45(5): 985-992.
doi: 10.16383/j.aas.c170423
cstr: 32138.14.j.aas.c170423
摘要:
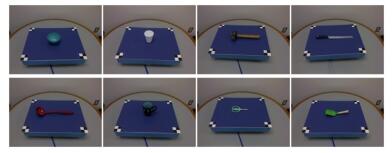
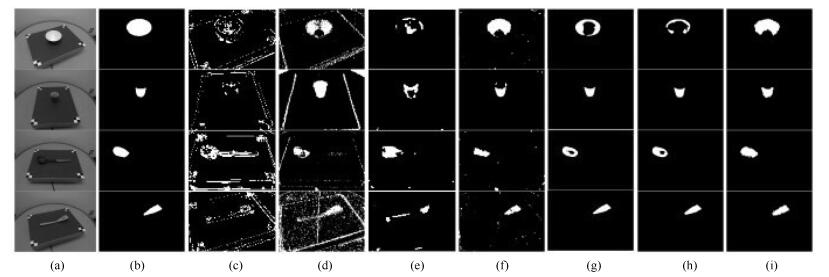
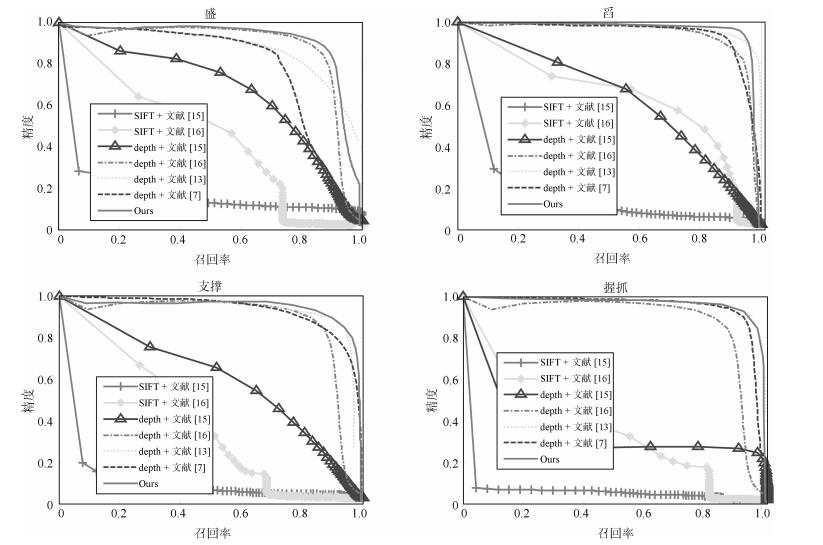
对工具及其功用性部件的认知是共融机器人智能提升的重要研究方向.本文针对家庭日常工具的功用性部件建模与检测问题展开研究,提出了一种基于条件随机场(Conditional random field,CRF)和稀疏编码联合学习的家庭日常工具功用性部件检测算法.首先,从工具深度图像提取表征工具功用性部件的几何特征;然后,分析CRF和稀疏编码之间的耦合关系并进行公式化表示,将特征稀疏化后作为潜变量构建初始条件随机场模型,并进行稀疏字典和CRF的协同优化:一方面,将特征的稀疏表示作为CRF的随机变量条件及权重参数选择器;另一方面,在CRF调控下对稀疏字典进行更新.随后使用自适应时刻估计(Adaptive moment estimation,Adam)方法实现模型解耦与求解.最后,给出了基于联合学习的工具功用性部件模型离线构建算法,以及基于该模型的在线检测方法.实验结果表明,相较于使用传统特征提取和模型构建方法,本文方法对功用性部件的检测精度和效率均得到提升,且能够满足普通配置机器人对工具功用性认知的需要.
对工具及其功用性部件的认知是共融机器人智能提升的重要研究方向.本文针对家庭日常工具的功用性部件建模与检测问题展开研究,提出了一种基于条件随机场(Conditional random field,CRF)和稀疏编码联合学习的家庭日常工具功用性部件检测算法.首先,从工具深度图像提取表征工具功用性部件的几何特征;然后,分析CRF和稀疏编码之间的耦合关系并进行公式化表示,将特征稀疏化后作为潜变量构建初始条件随机场模型,并进行稀疏字典和CRF的协同优化:一方面,将特征的稀疏表示作为CRF的随机变量条件及权重参数选择器;另一方面,在CRF调控下对稀疏字典进行更新.随后使用自适应时刻估计(Adaptive moment estimation,Adam)方法实现模型解耦与求解.最后,给出了基于联合学习的工具功用性部件模型离线构建算法,以及基于该模型的在线检测方法.实验结果表明,相较于使用传统特征提取和模型构建方法,本文方法对功用性部件的检测精度和效率均得到提升,且能够满足普通配置机器人对工具功用性认知的需要.


2019, 45(5): 993-1003.
doi: 10.16383/j.aas.c170740
cstr: 32138.14.j.aas.c170740
摘要:
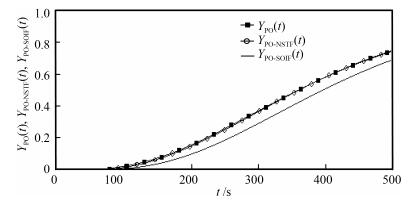
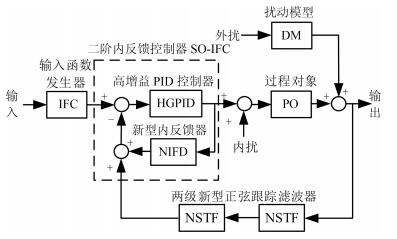
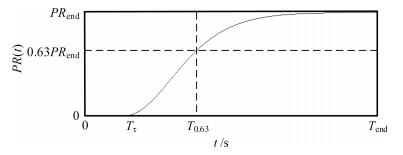
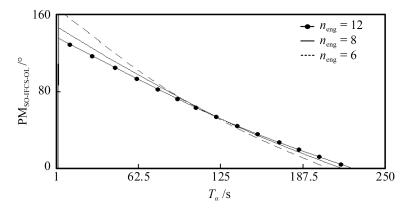
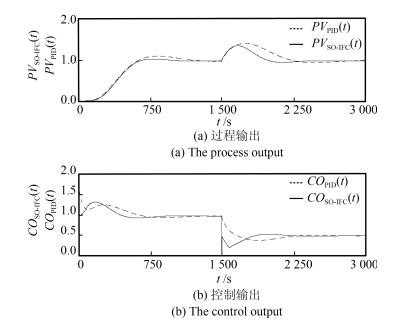
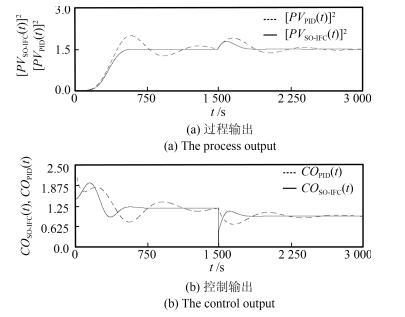
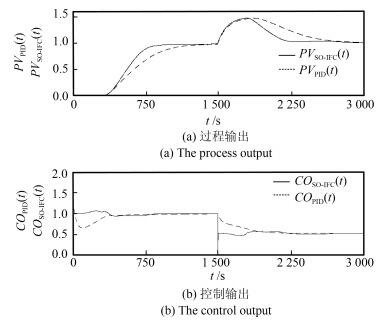
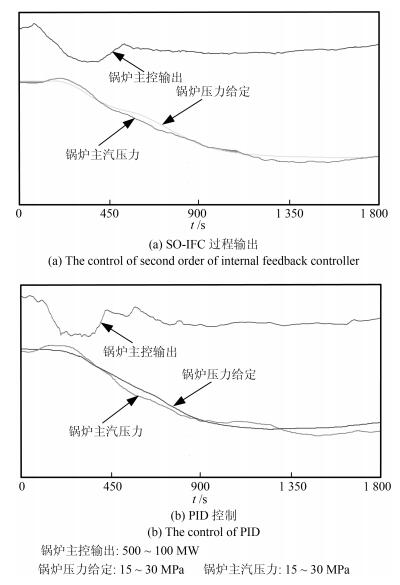
现代控制论与控制实际之间存在一些"鸿沟",根据PID(Proportional-integral-derivative)控制器具有良好抗扰性的事实,提出了一种基于PID的二阶内反馈控制器(Second order of internal feedback controller,SO-IFC).基于在新型"高效"滤波方法上的一些进展,将一种新型正弦跟踪滤波方法(New sinusoid tracking filter,NSTF)运用于SO-IFC控制回路的噪声干扰滤波.针对被控对象的准确数学模型难以获取的问题,将一种根据过程增益(Process gain,PG)和过程总滞后(Process all lag,PAL)的工程参数整定方法(Engineering parameter tuning method,EPTM)运用于SO-IFC参数的整定,降低了SO-IFC参数整定的难度.将SO-IFC运用于大滞后过程的控制,具有良好的控制性能包括良好的扰动抑制性能.数学分析、仿真实验和实际应用的结果验证了文中所提出观点和方法的正确性和有效性.
现代控制论与控制实际之间存在一些"鸿沟",根据PID(Proportional-integral-derivative)控制器具有良好抗扰性的事实,提出了一种基于PID的二阶内反馈控制器(Second order of internal feedback controller,SO-IFC).基于在新型"高效"滤波方法上的一些进展,将一种新型正弦跟踪滤波方法(New sinusoid tracking filter,NSTF)运用于SO-IFC控制回路的噪声干扰滤波.针对被控对象的准确数学模型难以获取的问题,将一种根据过程增益(Process gain,PG)和过程总滞后(Process all lag,PAL)的工程参数整定方法(Engineering parameter tuning method,EPTM)运用于SO-IFC参数的整定,降低了SO-IFC参数整定的难度.将SO-IFC运用于大滞后过程的控制,具有良好的控制性能包括良好的扰动抑制性能.数学分析、仿真实验和实际应用的结果验证了文中所提出观点和方法的正确性和有效性.






2019, 45(5): 1004-1014.
doi: 10.16383/j.aas.c170520
cstr: 32138.14.j.aas.c170520
摘要:
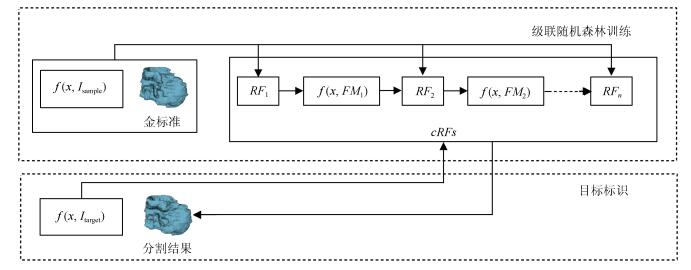
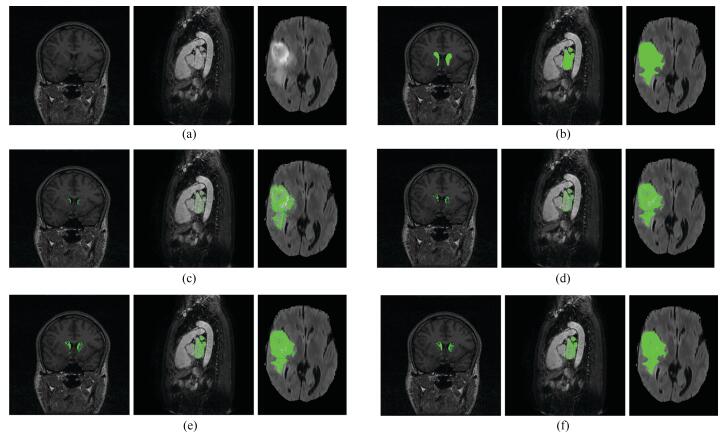
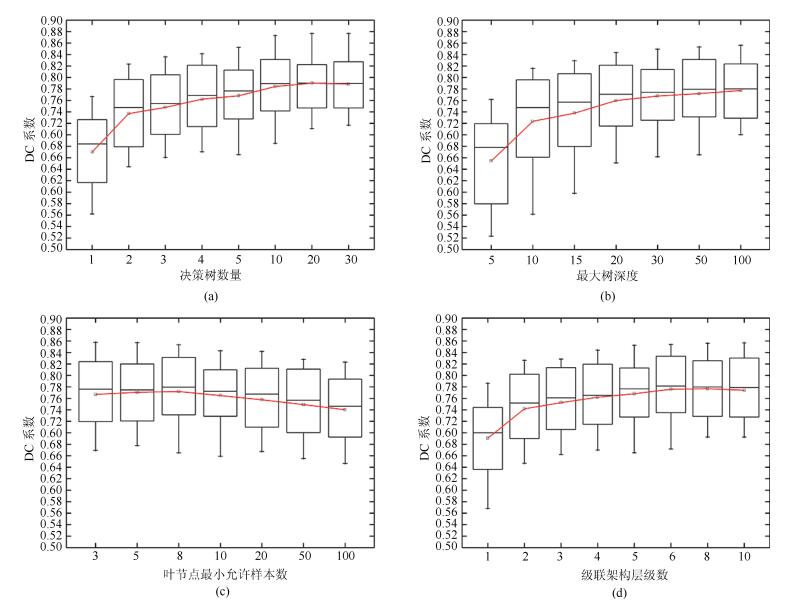
针对医学磁共振(Magnetic resonance,MR)图像三维分割中随机森林(Random forest,RF)方法难以获得具有几何约束的结果以及活动轮廓模型(Active contour model,ACM)不能自动分割发生信号混叠的组织结构的问题,提出了一种整合了级联随机森林与活动轮廓模型的磁共振图像三维分割方法.该方法首先从多模态磁共振体数据中提取图像多尺度局部鲁棒统计信息,以此驱动级联随机森林对磁共振图像进行迭代的体素分类,从而获得对组织结构的初步分割结果,进一步将此结果作为初始轮廓与形状先验,整合进一个尺度可调的活动轮廓模型中,将独立的体素分类转化为轮廓曲线演化,最终得到具有几何约束的精确分割结果.在公开数据集上的实验结果表明,本文的自动化分割方法在分割精度和鲁棒性等方面,相比其他同类方法具有较大的性能提升.
针对医学磁共振(Magnetic resonance,MR)图像三维分割中随机森林(Random forest,RF)方法难以获得具有几何约束的结果以及活动轮廓模型(Active contour model,ACM)不能自动分割发生信号混叠的组织结构的问题,提出了一种整合了级联随机森林与活动轮廓模型的磁共振图像三维分割方法.该方法首先从多模态磁共振体数据中提取图像多尺度局部鲁棒统计信息,以此驱动级联随机森林对磁共振图像进行迭代的体素分类,从而获得对组织结构的初步分割结果,进一步将此结果作为初始轮廓与形状先验,整合进一个尺度可调的活动轮廓模型中,将独立的体素分类转化为轮廓曲线演化,最终得到具有几何约束的精确分割结果.在公开数据集上的实验结果表明,本文的自动化分割方法在分割精度和鲁棒性等方面,相比其他同类方法具有较大的性能提升.