

Fault Prognosis of Marine Diesel Engine With Working State Transition Based on EIIKF
-
摘要: 船舶柴油机作为大多数船舶的动力源泉,具有十分重要的地位,其健康状态直接影响了船舶的稳定运行.由于船舶柴油机具有工作环境复杂且工况多变的特点,不利于传统故障预测方法的应用.本文提出了一种增强型间歇性未知输入卡尔曼滤波器,可以有效降低建模的复杂度,应对具有不同的工作状态的参数预测.最后本文提出并使用改进的序贯概率比检验进行残差处理,减小故障误报.仿真结果表明,该方法可以较好地对船舶柴油机系统故障进行预测.Abstract: The marine diesel engine serves as the power source of most vessels, which has a very important position. Its health status directly affect the ship's stable operation. The traditional fault prognosis methods are difficult to apply to the marine diesel engine due to its different operating environments and work patterns. In this paper, we propose an enhanced intermittent unknown input Kalman filter which can effectively reduce the complexity of modeling and deal with the fault prognosis with different working modes. Also this paper uses the improved sequential probability ratio test for residual processing to reduce the probability of false alarm. According to the simulation results, the proposed method demonstrated superiority and feasibility in fault prognosis for the marine diesel engine.1) 本文责任编委 郭戈
-

图 1 三种算法对排气温度的预测结果比较
Fig. 1 The comparison of parameter prediction results for exhaust temperature of three algorithms
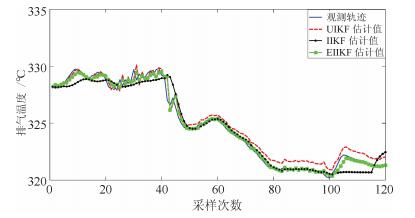
图 2 三种算法对具有工作状态转换的排气温度预测结果
Fig. 2 The prediction results of exhaust gas temperature with working state transition by three algorithms
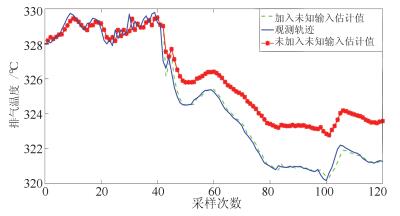
图 3 EIIKF对加入和未加入未知输入时的排气温度预测结果
Fig. 3 The prediction results of exhaust gas temperature with and without unknown input by EIIKF

图 4 EIIKF排气温度的预测结果及三倍标准差残差判断
Fig. 4 The prediction result of exhaust gas temperature use EIIKF and three-sigma range residual judgment
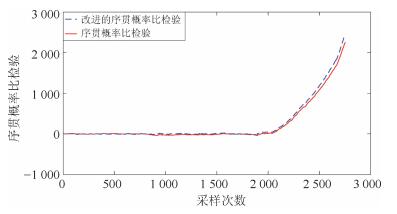
图 5 序贯概率比检验和改进序贯概率比检验结果对比
Fig. 5 The comparison of sequential probability ratio test results and improved sequential probability ratio test results
表 1 三种算法参数预测误差对比表
Table 1 The residual comparison of three algorithms for parameter prognosis
 下载: 导出CSV
下载: 导出CSV
表 2 几种方法残差处理对比表
Table 2 comparison of several methods for residual processing
故障 判断参数 三倍标准差 序贯概率比检验 支持向量机 改进序贯概率比检验 误判率 0.12 % 0.47 % 0.71 % 0.12 % 故障1 漏判率 53.43 % 32.27 % 40.77 % 23.86 % 精确度 79.67 % 87.47 % 84.1 % 90.88 % 误判率 5.44 % 9 % 7.44 % 0 故障2 漏判率 40.31 % 4.06 % 41.23 % 14.48 % 精确度 76.56 % 93.55 % 75.12 % 92.53 % 误判率 0.44 % 3 % 7.89 % 0 故障3 漏判率 54.17 % 36.56 % 42.49 % 38.33 % 精确度 71.83 % 79.68 % 74.35 % 80.22 %
下载: 导出CSV
表 3 IIKF和EIIKF故障预测对比表
Table 3 The comparison of IIKF and EIIKF for fault prognosis
IIKF EIIKF 预测情况 预判延误 预测情况 预判延误 故障1 正确 375 正确 252 故障2 错误 正确 248 故障3 正确 158 正确 79
下载: 导出CSV
-
[1] Cai C T, Weng X Y, Zhang C B. A novel approach for marine diesel engine fault diagnosis. Cluster Computing, 2017, 20(2): 1691-1702 doi: 10.1007/s10586-017-0748-0 [2] 周东华, 胡艳艳.动态系统的故障诊断技术.自动化学报, 2009, 35(6): 748-758 http://www.aas.net.cn/CN/abstract/abstract13336.shtmlZhou Dong-Hua, Hu Yan-Yan. Fault diagnosis techniques for dynamic systems. Acta Automatica Sinica, 2009, 35(6): 748-758 http://www.aas.net.cn/CN/abstract/abstract13336.shtml [3] Basurko O C, Uriondo Z. Condition-based maintenance for medium speed diesel engines used in vessels in operation. Applied Thermal Engineering, 2015, 80: 404-412 doi: 10.1016/j.applthermaleng.2015.01.075 [4] Nahim H M, Younes R, Shraim H, Ouladsine M. Oriented review to potential simulator for faults modeling in diesel engine. Journal of Marine Science and Technology, 2016, 21(3): 533-551 doi: 10.1007/s00773-015-0358-6 [5] 马洁, 李钢, 陈默.基于非线性故障重构的旋转机械故障预测方法.自动化学报, 2014, 40(9): 2045-2050 http://www.aas.net.cn/CN/abstract/abstract18477.shtmlMa Jie, Li Gang, Chen Mo. Nonlinear fault reconstruction based fault prognosis for rotating machinery. Acta Automatica Sinica, 2014, 40(9): 2045-2050 http://www.aas.net.cn/CN/abstract/abstract18477.shtml [6] Moosavian A, Najafi G, Ghobadian B, Mirsalim M, Jafari S M, Sharghi P. Piston scuffing fault and its identification in an IC engine by vibration analysis. Applied Acoustics, 2016, 102: 40-48 doi: 10.1016/j.apacoust.2015.09.002 [7] Yang Y S, Ming A B, Zhang Y Y, Zhu Y S. Discriminative non-negative matrix factorization (DNMF) and its application to the fault diagnosis of diesel engine. Mechanical Systems and Signal Processing, 2017, 95: 158-171 doi: 10.1016/j.ymssp.2017.03.026 [8] Morgan I, Liu H H, Tormos B, Sala A. Detection and diagnosis of incipient faults in heavy-duty diesel engines. IEEE Transactions on Industrial Electronics, 2010, 57(10): 3522-3532 doi: 10.1109/TIE.2009.2038337 [9] Porteiro J, Collazo J, Patiño D, Míguez J L. Diesel engine condition monitoring using a multi-net neural network system with nonintrusive sensors. Applied Thermal Engineering, 2011, 31(17-18): 4097-4105 doi: 10.1016/j.applthermaleng.2011.08.020 [10] Diez-Olivan A, Pagan J A, Khoa N L D, Sanz R, Sierra B. Kernel-based support vector machines for automated health status assessment in monitoring sensor data. The International Journal of Advanced Manufacturing Technology, 2018, 95(1-4): 327-340 doi: 10.1007/s00170-017-1204-2 [11] 胡昌华, 王兆强, 周志杰, 司小胜.一种RVM模糊模型辨识方法及在故障预报中的应用.自动化学报, 2011, 37(4): 503-512 http://www.aas.net.cn/CN/abstract/abstract17472.shtmlHu Chang-Hua, Wang Zhao-Qiang, Zhou Zhi-Jie, Si Xiao-Sheng. An RVM fuzzy model identification method and its application to fault prediction. Acta Automatica Sinica, 2011, 37(4): 503-512 http://www.aas.net.cn/CN/abstract/abstract17472.shtml [12] 郑太雄, 张瑜, 李永福.汽车发动机失火故障诊断方法研究综述.自动化学报, 2017, 43(4): 509-527 http://www.aas.net.cn/CN/abstract/abstract19030.shtmlZheng Tai-Xiong, Zhang Yu, Li Yong-Fu. Misfire fault diagnosis of automobile engine: a review. Acta Automatica Sinica, 2017, 43(4): 509-527 http://www.aas.net.cn/CN/abstract/abstract19030.shtml [13] 郑建飞, 胡昌华, 司小胜, 张正新, 张鑫.考虑不确定测量和个体差异的非线性随机退化系统剩余寿命估计.自动化学报, 2017, 43(2): 259-270 http://www.aas.net.cn/CN/abstract/abstract19004.shtmlZheng Jian-Fei, Hu Chang-Hua, Si Xiao-Sheng, Zhang Zheng-Xin, Zhang Xin. Remaining useful life estimation for nonlinear stochastic degrading systems with uncertain measurement and unit-to-unit variability. Acta Automatica Sinica, 2017, 43(2): 259-270 http://www.aas.net.cn/CN/abstract/abstract19004.shtml [14] Jin X H, Sun Y, Que Z J, Wang Y, Chow T W S. Anomaly detection and fault prognosis for bearings. IEEE Transactions on Instrumentation and Measurement, 2016, 65(9): 2046-2054 doi: 10.1109/TIM.2016.2570398 [15] 杜占龙, 李小民.基于多渐消因子强跟踪UKF和约束AR模型的故障估计与预测.控制与决策, 2014, 29(9): 1667-1672 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201409023Du Zhan-Long, Li Xiao-Min. Fault estimation and prediction based on multiple fading factors strong tracking UKF and constrained AR model. Control and Decision, 2014, 29(9): 1667-1672 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201409023 [16] Gillijns S, De Moor B. Unbiased minimum-variance input and state estimation for linear discrete-time systems. Automatica, 2007, 43(1): 111-116 doi: 10.1016/j.automatica.2006.08.002 [17] Ghahremani E, Kamwa I. Dynamic state estimation in power system by applying the extended Kalman filter with unknown inputs to phasor measurements. IEEE Transactions on Power Systems, 2011, 26(4): 2556-2566 doi: 10.1109/TPWRS.2011.2145396 [18] Keller J Y, Sauter D D J. Kalman filter for discrete-time stochastic linear systems subject to intermittent unknown inputs. IEEE Transactions on Automatic Control, 2013, 58(7): 1882-1887 doi: 10.1109/TAC.2013.2264739 [19] Al-Dahidi S, Baraldi P, Di Maio F, Zio E. A novel fault detection system taking into account uncertainties in the reconstructed signals. Annals of Nuclear Energy, 2014, 73: 131-144 doi: 10.1016/j.anucene.2014.06.036 [20] 杜党波, 张伟, 胡昌华, 周志杰, 司小胜, 张建勋.含缺失数据的小波—卡尔曼滤波故障预测方法.自动化学报, 2014, 40(10): 2115-2125 http://www.aas.net.cn/CN/abstract/abstract18486.shtmlDu Dang-Bo, Zhang Wei, Hu Chang-Hua, Zhou Zhi-Jie, Si Xiao-Sheng, Zhang Jian-Xun. A failure prognosis method based on Wavelet-Kalman filtering with missing data. Acta Automatica Sinica, 2014, 40(10): 2115-2125 http://www.aas.net.cn/CN/abstract/abstract18486.shtml [21] Lv S G, Yang L, Yang Q. Research on the applications of infrared technique in the diagnosis and prediction of diesel engine exhaust fault. Journal of Thermal Science, 2011, 20(2): 189-194 doi: 10.1007/s11630-011-0456-7 [22] Gillijns S, De Moor B. Unbiased minimum-variance input and state estimation for linear discrete-time systems with direct feedthrough. Automatica, 2007, 43(5): 934-937 doi: 10.1016/j.automatica.2006.11.016 [23] Sun B, Luh P B, Jia Q S, O'Neill Z, Song F T. Building energy doctors: an SPC and Kalman filter-based method for system-level fault detection in HVAC systems. IEEE Transactions on Automation Science and Engineering, 2014, 11(1): 215-229 doi: 10.1109/TASE.2012.2226155 -

 下载:
下载:

计量
- 文章访问数: 2084
- HTML全文浏览量: 391
- PDF下载量: 520
- 被引次数: 0
