

-
摘要: 现代控制论与控制实际之间存在一些"鸿沟",根据PID(Proportional-integral-derivative)控制器具有良好抗扰性的事实,提出了一种基于PID的二阶内反馈控制器(Second order of internal feedback controller,SO-IFC).基于在新型"高效"滤波方法上的一些进展,将一种新型正弦跟踪滤波方法(New sinusoid tracking filter,NSTF)运用于SO-IFC控制回路的噪声干扰滤波.针对被控对象的准确数学模型难以获取的问题,将一种根据过程增益(Process gain,PG)和过程总滞后(Process all lag,PAL)的工程参数整定方法(Engineering parameter tuning method,EPTM)运用于SO-IFC参数的整定,降低了SO-IFC参数整定的难度.将SO-IFC运用于大滞后过程的控制,具有良好的控制性能包括良好的扰动抑制性能.数学分析、仿真实验和实际应用的结果验证了文中所提出观点和方法的正确性和有效性.Abstract: The modern cybernetics has some difficulty in practical application, as the proportional-integral-derivative (PID) has good anti-jamming performance, a second order of internal feedback controller which is based on PID is proposed (SO-IFC). Based on the advances high efficiency filtering method, a sinusoid tracking filter (STF) is applied to noise filtering of the SO-IFC control loop. Aiming at the question of controlled object which is difficult to obtain the accurate mathematical model, an engineering parameter tuning method (EPTM) which the based on the process gain (PG) and the process total lag (PAL) has been used to parameter setting of the SO-IFC that reduces the difficulty of tuning the SO-IFC parameters. The SO-IFC is applied to the control of higher-order controlled objects, good anti-jamming control performance has been obtained. The results of mathematical analysis, simulation experiments and practical applications verify the validity of the views and methods proposed in this paper.1) 本文责任编委 张卫东
-
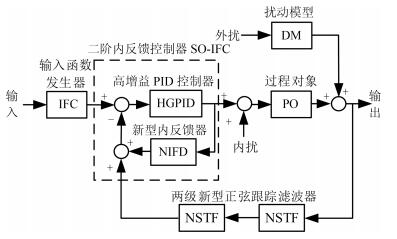
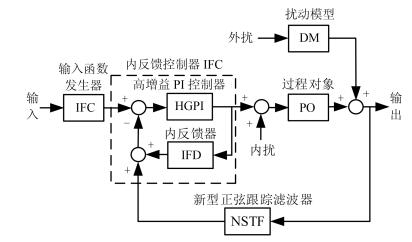
图 3 二阶内反馈控制系统结构示意图
Fig. 3 Structure diagram of second order of internal feedback control system

图 4 SO-IFCS开环系统频域相位稳定裕度
Fig. 4 Schematic diagram of frequency domain phase stability margin of open loop system of second order of internal feedback control system
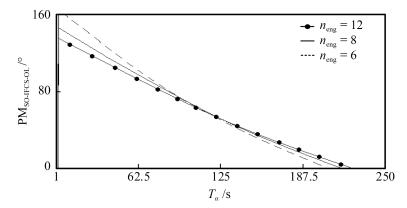
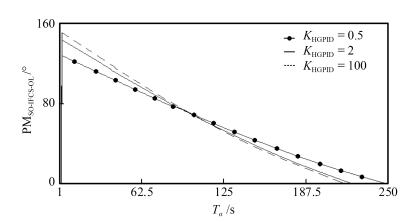
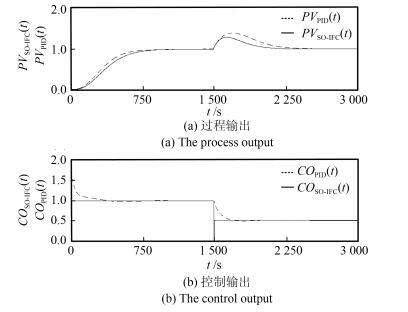
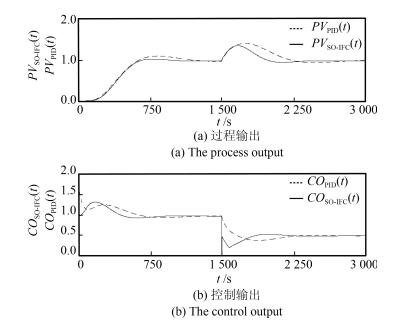
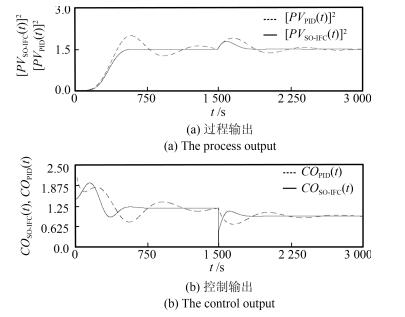


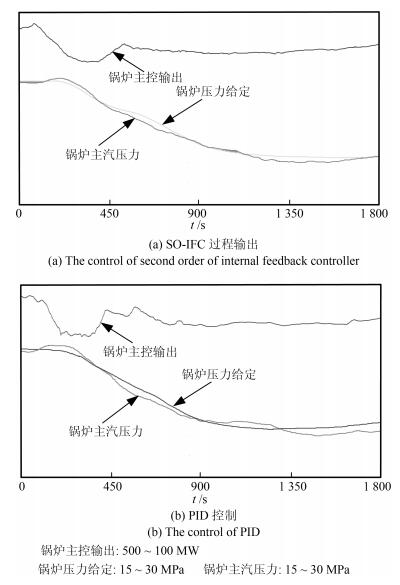
图 12 工程对象控制特性仿真实验结果
Fig. 12 The diagram of control characteristic simulation results of engineering object
表 1 SO-IFC工程参数
Table 1 Engineering parameter of second order of internal feedback controller
$\textit{n}_{\textrm{eng}}$ $\textit{T}_{\textrm{NIFD}}= \textit{T}_{\textrm{0.63}}/ n_{\textrm{eng}}$ $\textit{K}_{\textrm{NIFD}}=\textit{K}_{\alpha}$ $\textit{n}_{\textrm{eng}}$ = 6 $\textit{T}_{\textrm{NIFD}}$ = 103 s $\textit{K}_{\textrm{NIFD}}$ = 1 $\textit{n}_{\textrm{eng}}$ = 8 $\textit{T}_{\textrm{NIFD}}$ = 77 s $\textit{K}_{\textrm{NIFD}}$ = 1 $\textit{n}_{\textrm{eng}}$ = 12 $\textit{T}_{\textrm{NIFD}}$ = 39 s $\textit{K}_{\textrm{NIFD}}$ = 1  下载: 导出CSV
下载: 导出CSV
-
[1] 高志强.自抗扰控制思想探究.控制理论与应用, 2013, 30(12):1498-1510 doi: 10.7641/CTA.2013.31087Gao Zhi-Qiang. On the foundation of active disturbance rejection control. Control Theory & Applications, 2013, 30(12):1498-1510 doi: 10.7641/CTA.2013.31087 [2] 曹叙风, 王昕, 王振雷.基于切换机制的多模型自适应混合控制.自动化学报, 2017, 43(1):94-100 http://www.aas.net.cn/CN/abstract/abstract18991.shtmlCao Xu-Feng, Wang Xin, Wang Zhen-Lei. Multiple model adaptive mixing control based on switching. Acta Automatica Sinica, 2017, 43(1):94-100 http://www.aas.net.cn/CN/abstract/abstract18991.shtml [3] 朱宇轩, 李少远.双层模型预测控制系统的多包镇定域分析与系统设计.自动化学报, 2018, 44(2):262-269 http://www.aas.net.cn/CN/abstract/abstract19221.shtmlZhu Yu-Xuan, Li Shao-Yuan. Analysis and system design of multi-convex hull stabilization domain for double-layered model predictive control system. Acta Automatica Sinica, 2018, 44(2):262-269 http://www.aas.net.cn/CN/abstract/abstract19221.shtml [4] 张彦, 张涛, 王锐, 刘亚杰.基于模型预测控制的含多微电网的能源互联网分布式协同优化.自动化学报, 2017, 43(8):1443-1456 http://www.aas.net.cn/CN/abstract/abstract19119.shtmlZhang Yan, Zhang Tao, Wang Rui, Liu Ya-Jie. A model predictive control based distributed coordination of multi-microgrids in energy internet. Acta Automatica Sinica, 2017, 43(8):1443-1456 http://www.aas.net.cn/CN/abstract/abstract19119.shtml [5] 程换新, 伊飞.面向轻汽油醚化的BP神经网络的模型预测控制.石油化工自动化, 2012, 48(6):40-42 doi: 10.3969/j.issn.1007-7324.2012.06.014Cheng Huan-Xin, Yi Fei. Light gasoline etherification predictive control with BP neural network model. Automation in Petro-Chemical Industry, 2012, 48(6):40-42 doi: 10.3969/j.issn.1007-7324.2012.06.014 [6] 冯立.基于模型预测控制的反应再生工艺控制实现.石油化工应用, 2012, 31(1):47-50 doi: 10.3969/j.issn.1673-5285.2012.01.015Feng Li. The realization of process control in reactor-regenerator section based on model predictive control. Petrochemical Industry Application, 2012, 31(1):47-50 doi: 10.3969/j.issn.1673-5285.2012.01.015 [7] 胡品慧, 袁璞.状态反馈预测控制系统的鲁棒稳定性.控制与决策, 2001, 16(1):126-128 doi: 10.3321/j.issn:1001-0920.2001.01.034Hu Pin-Hui, Yuan Pu. Robustness of state feedback predictive control systems. Control and Decision, 2001, 16(1):126-128 doi: 10.3321/j.issn:1001-0920.2001.01.034 [8] 童一飞, 金晓明.基于广义预测控制的循环流化床锅炉燃烧过程多目标优化控制策略.中国电机工程学报, 2010, 30(11):38-43 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgdjgcxb201011007Tong Yi-Fei, Jin Xiao-Ming. Optimal control of multi-objective in circulating fluidized bed boiler combustion process based on generalized predictive control method. Proceedings of the CSEE, 2010, 30(11):38-43 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgdjgcxb201011007 [9] 李世卿, 丁宝苍.基于动态矩阵控制的双层结构预测控制的整体解决方案.自动化学报, 2015, 41(11):1857-1866 http://www.aas.net.cn/CN/abstract/abstract18761.shtmlLi Shi-Qing, Ding Bao-Cang. An overall solution to double-layered model predictive control based on dynamic matrix control. Acta Automatica Sinica, 2015, 41(11):1857-1866 http://www.aas.net.cn/CN/abstract/abstract18761.shtml [10] 黄德先, 江永亨, 金以慧.炼油工业过程控制的研究现状、问题与展望.自动化学报, 2017, 43(6):902-916 http://www.aas.net.cn/CN/abstract/abstract19069.shtmlHuang De-Xian, Jiang Yong-Heng, Jin Yi-Hui. Present research situation, major bottlenecks, and prospect of refinery industry process control. Acta Automatica Sinica, 2017, 43(6):902-916 http://www.aas.net.cn/CN/abstract/abstract19069.shtml [11] 席裕庚, 李德伟, 林姝.模型预测控制——现状与挑战.自动化学报, 2013, 39(3):222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtmlXi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control——status and challenges. Acta Automatica Sinica, 2013, 39(3):222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtml [12] 钱积新.控制理论研究中的几个挑战性的问题.控制工程, 2005, 12(3):193-195 doi: 10.3969/j.issn.1671-7848.2005.03.001Qian Ji-Xin. Some challenging problems in research on control theory. Control Engineering of China, 2005, 12(3):193-195 doi: 10.3969/j.issn.1671-7848.2005.03.001 [13] 许颜贺, 周建中, 薛小明, 夏鑫, 裴翔羽, 李超顺.抽水蓄能机组空载工况分数阶PID调节控制.电力系统自动化, 2015, 39(18):43-48 doi: 10.7500/AEPS20140910005Xu Yan-He, Zhou Jian-Zhong, Xue Xiao-Ming, Xia Xin, Pei Xiang-Yu, Li Chao-Shun. Fractional order PID-based regulation and control of pumped storage units under no-load condition. Automation of Electric Power Systems, 2015, 39(18):43-48 doi: 10.7500/AEPS20140910005 [14] 梁新荣, 刘艳艳, 满国永, 徐建闽.基于小脑模型关节控制器与PID复合的高速公路交通流密度控制.控制理论与应用, 2013, 30(10):1281-1286 doi: 10.7641/CTA.2013.30016Liang Xin-Rong, Liu Yan-Yan, Man Guo-Yong, Xu Jian-Min. Density control for freeway traffic flow based on the composite of PID controller and cerebella model articulation controller. Control Theory & Applications, 2013, 30(10):1281-1286 doi: 10.7641/CTA.2013.30016 [15] 张冬丽, 唐英干, 关新平.用改进的人工蜂群算法设计AVR系统最优分数阶PID控制器.自动化学报, 2014, 40(5):973-979 http://www.aas.net.cn/CN/abstract/abstract18365.shtmlZhang Dong-Li, Tang Ying-Gan, Guan Xin-Ping. Optimum design of fractional order PID controller for an AVR system using an improved artificial bee colony algorithm. Acta Automatica Sinica, 2014, 40(5):973-979 http://www.aas.net.cn/CN/abstract/abstract18365.shtml [16] 王建宏.内模控制中的虚拟参考反馈校正设计.系统科学与数学, 2017, 37(2):355-369 http://d.old.wanfangdata.com.cn/Periodical/xtkxysx-zw201702005Wang Jian-Hong. Virtual reference feedback tuning design in internal model control. Journal of Systems Science and Mathematical Sciences, 2017, 37(2):355-369 http://d.old.wanfangdata.com.cn/Periodical/xtkxysx-zw201702005 [17] 邹涛, 王丁丁, 丁宝苍, 于海斌.积分过程预测控制的稳态分析及反馈校正.控制理论与应用, 2014, 31(2):165-174 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201402005Zou Tao, Wang Ding-Ding, Ding Bao-Cang, Yu Hai-Bin. Steady-state analysis and feedback correction of model predictive control for integrating process. Control Theory & Applications, 2014, 31(2):165-174 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201402005 [18] 韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术.北京:国防工业出版社, 2008.Han Jing-Qing. Active Disturbance Rejection Control:The Technique for Estimating and Compensating the Uncertainties. Beijing:National Denfence Industry Press, 2008. [19] 孙立, 董君伊, 李东海, 薛亚丽.基于扩张状态观测器的汽轮机功频电液串级控制.中国电机工程学报, 2015, 35(7):1697-1703 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201507018Sun Li, Dong Jun-Yi, Li Dong-Hai, Xue Ya-Li. Cascaded load-frequency digital electric-hydraulic regulation of turbine via extended state observer. Proceedings of the CSEE, 2015, 35(7):1697-1703 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201507018 [20] Zheng Q, Gao L Q, Gao Z Q. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. In: Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, LA: IEEE, 2007. 3501-3506 [21] 李军, 陈世和, 万文军, 王越超, 黄卫剑.一种内反馈控制器IFC的研究与应用.自动化学报, 2018, 44(9):1706-1716 http://www.aas.net.cn/CN/abstract/abstract19352.shtmlLi Jun, Chen Shi-He, Wan Wen-Jun, Wang Yue-Chao, Huang Wei-Jian. An internal feedback controller.Acta Automatica Sinica, 2018, 44(9):1706-1716 http://www.aas.net.cn/CN/abstract/abstract19352.shtml [22] 谢永斌, 罗忠, 冯祖仁, 胡保生.二阶惯性系统DMC预测控制的闭环分析.控制理论与应用, 1997, 14(3):398-402 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY199703017.htmXie Yong-Bin, Luo Zhong, Feng Zu-Ren, Hu Bao-Sheng. Research of closed-loop for DMC predictive control of second-order system. Control Theory & Applications, 1997, 14(3):398-402 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY199703017.htm [23] 张勇.时滞对一类单位负反馈二阶振荡系统的正面作用分析.物理学报, 2012, 61(23):6-12 http://d.old.wanfangdata.com.cn/Periodical/wlxb201223003Zhang Yong. Analysis on positive effect of time-delay on a class of second-order oscillatory systems with unit negative feedback. Acta Physica Sinica, 2012, 61(23):6-12 http://d.old.wanfangdata.com.cn/Periodical/wlxb201223003 [24] 朱波, 王新华, 蔡开元.双积分系统阶跃响应快速无超调控制:一种增益切换非线性PD控制.控制理论与应用, 2009, 26(10):1111-1117 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200910010Zhu Bo, Wang Xin-Hua, Cai Kai-Yuan. Fast and nonovershooting control for a double-integral system with step input:nonlinear PD control based on gain-switching. Control Theory & Applications, 2009, 26(10):1111-1117 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200910010 [25] 钟斌, 战仁军.基于广义高斯函数的二阶非线性系统滑模控制.计算机仿真, 2010, 27(4):371-374 doi: 10.3969/j.issn.1006-9348.2010.04.089Zhong Bin, Zhan Ren-Jun. Sliding-mode control for second order nonlinear system based on generalized Gauss function. Computer Simulation, 2010, 27(4):371-374 doi: 10.3969/j.issn.1006-9348.2010.04.089 [26] 段广仁.不确定二阶时变系统的稳定鲁棒性.系统科学与数学, 2014, 34(10):1192-1205 http://d.old.wanfangdata.com.cn/Periodical/xtkxysx-zw201410006Duan Guang-Ren. Robust stability of uncertain second-order time-varying linear systems. Journal of Systems Science and Mathematical Sciences, 2014, 34(10):1192-1205 http://d.old.wanfangdata.com.cn/Periodical/xtkxysx-zw201410006 [27] 袁东, 马晓军, 曾庆含, 邱晓波.二阶系统线性自抗扰控制器频带特性与参数配置研究.控制理论与应用, 2013, 30(12):1630-1640 doi: 10.7641/CTA.2013.30424Yuan Dong, Ma Xiao-Jun, Zeng Qing-Han, Qiu Xiao-Bo. Research on frequency-band characteristics and parameters configuration of linear active disturbance rejection control for second-order systems. Control Theory & Applications, 2013, 30(12):1630-1640 doi: 10.7641/CTA.2013.30424 [28] 徐传敬, 赵敏, 李天明.一种改进遗传算法的PID参数整定研究.计算机技术与发展, 2016, 26(9):12-15 http://d.old.wanfangdata.com.cn/Periodical/wjfz201609004Xu Chuan-Jing, Zhao Min, Li Tian-Ming. Research on PID parameter tuning based on an improved genetic algorithm. Computer Technology and Development, 2016, 26(9):12-15 http://d.old.wanfangdata.com.cn/Periodical/wjfz201609004 [29] 刘小斌.基于BP神经网络PID参数整定的空燃比控制策略研究.兰州工业学院学报, 2013, 20(6):7-11, 29 doi: 10.3969/j.issn.1009-2269.2013.06.002Liu Xiao-Bin. Study on the control strategy of air-fuel ratio of network PID parameter tuning based on BP neural. Journal of Lanzhou Institute of Technology, 2013, 20(6):7-11, 29 doi: 10.3969/j.issn.1009-2269.2013.06.002 [30] 杨智, 陈颖.改进粒子群算法及其在PID整定中的应用.控制工程, 2016, 23(2):161-166 http://d.old.wanfangdata.com.cn/Periodical/jczdh201602001Yang Zhi, Chen Ying. Improved particle swarm optimization and its application in PID tuning. Control Engineering of China, 2016, 23(2):161-166 http://d.old.wanfangdata.com.cn/Periodical/jczdh201602001 [31] 刘希, 孙秀霞, 郝震, 刘宇坤.最速跟踪微分器的一种新型离散形式.信息与控制, 2013, 42(6):729-734 http://d.old.wanfangdata.com.cn/Periodical/xxykz201306011Liu Xi, Sun Xiu-Xia, Hao Zhen, Liu Yu-Kun. A new discrete-time form of optimal tracking differentiator. Information and Control, 2013, 42(6):729-734 http://d.old.wanfangdata.com.cn/Periodical/xxykz201306011 [32] Guo B Z, Zhao Z L. On convergence of tracking differentiator. International Journal of Control, 2011, 84(4):693-701 doi: 10.1080/00207179.2011.569954 [33] 李向阳.基于有限时间跟踪微分器的迭代学习控制.自动化学报, 2014, 40(7):1366-1375 http://www.aas.net.cn/CN/abstract/abstract18408.shtmlLi Xiang-Yang. Iterative learning control based on finite time tracking differentiator. Acta Automatica Sinica, 2014, 40(7):1366-1375 http://www.aas.net.cn/CN/abstract/abstract18408.shtml [34] 李军, 万文军, 王越超.一种新型线性二阶滤波器的研究与应用.控制理论与应用, 2017, 34(3):312-320 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201703004Li Jun, Wan Wen-Jun, Wang Yue-Chao. Research and application of a new type of linear second-order filter. Control Theory & Applications, 2017, 34(3):312-320 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201703004 [35] 李军, 万文军, 胡康涛.一种基于点频滤波器的微分信号提取方法.自动化学报, 2017, 43(3):478-486 http://www.aas.net.cn/CN/abstract/abstract19026.shtmlLi Jun, Wan Wen-Jun, Hu Kang-Tao. A new method for extraction of process differential signal based on single-frequency-pass filter. Acta Automatica Sinica, 2017, 43(3):478-486 http://www.aas.net.cn/CN/abstract/abstract19026.shtml [36] 侯杰, 刘涛.基于新息估计和正交投影的闭环子空间模型辨识.自动化学报, 2016, 42(11):1657-1663 http://www.aas.net.cn/CN/abstract/abstract18955.shtmlHou Jie, Liu Tao. Closed-loop subspace model identification using innovation estimation and orthogonal projection. Acta Automatica Sinica, 2016, 42(11):1657-1663 http://www.aas.net.cn/CN/abstract/abstract18955.shtml [37] 尤明, 宗群, 曾凡琳, 陶阳, 徐锐.基于平衡截断方法的高超声速飞行器模型降阶.控制理论与应用, 2014, 31(6):795-800 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201406016You Ming, Zong Qun, Zeng Fan-Lin, Tao Yang, Xu Rui. Model order reduction for hypersonic vehicle based on balanced truncate method. Control Theory & Applications, 2014, 31(6):795-800 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201406016 [38] 岑翼刚, 尉宇, 孙德宝.小波阈值神经网络在信号去噪及预测中的应用.控制理论与应用, 2008, 25(3):485-491 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200803017Cen Yi-Gang, Wei Yu, Sun De-Bao. The application of wavelet threshold neural network in the de-noising and prediction. Control Theory & Applications, 2008, 25(3):485-491 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200803017 [39] 李军, 万文军, 刘志刚, 陈世和, 张曦.一种基于时域响应的控制系统频率特性分析方法.中国电机工程学报, 2012, 32(29):116-122 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201229017Li Jun, Wan Wen-Jun, Liu Zhi-Gang, Chen Shi-He, Zhang Xi. A method of frequency domain analysis for control systems based on process response in time domain. Proceedings of the CSEE, 2012, 32(29):116-122 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201229017 [40] 李军, 万文军.一种基于序列零初相位调制的新型正弦信号频率测量方法.自动化学报, 2016, 42(10):1585-1594 http://www.aas.net.cn/CN/abstract/abstract18945.shtmlLi Jun, Wan Wen-Jun. A novel sinusoidal frequency measurement method based on modulation of sequence with zero initial phase. Acta Automatica Sinica, 2016, 42(10):1585-1594 http://www.aas.net.cn/CN/abstract/abstract18945.shtml [41] 叶智, 李晓博, 康毅, 马乐, 杨新民, 高海东. FCS165现场总线控制系统实际微分PID控制器的设计.热力发电, 2011, 40(8):38-40 doi: 10.3969/j.issn.1002-3364.2011.08.038Ye Zhi, Li Xiao-Bo, Kang Yi, Ma Le, Yang Xin-Min, Gao Hai-Dong. Design of actual differential PID controller used in FCS 165 field bus control system. Thermal Power Generation, 2011, 40(8):38-40 doi: 10.3969/j.issn.1002-3364.2011.08.038 -

 下载:
下载:


计量
- 文章访问数: 2519
- HTML全文浏览量: 379
- PDF下载量: 513
- 被引次数: 0
