

Soft Measurement of Key Effluent Parameters in Wastewater Treatment Process Using Brain-like Modular Neural Networks
-
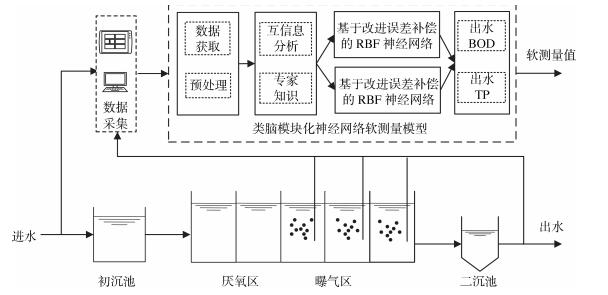
摘要: 针对城市污水处理过程关键出水参数难以实时检测的问题,文中提出了一种基于类脑模块化神经网络(Brain-like modular neural network,BLMNN)的关键出水参数软测量方法.首先,基于互信息和专家知识进行任务分解,分析关键出水参数的相关变量,获取各出水参数的辅助变量.其次,通过模拟大脑皮层模块化分区结构,构建软测量子模型对各水质参数进行同步测量,降低软测量模型复杂度的同时保证了其精度.最后,通过基于实际数据的仿真实验验证了所提出方法的准确性和有效性.Abstract: With the goal to realize the real-time measurement of key water quality parameters in wastewater treatment process, this paper constructs a novel soft-measurement model based on the brain-like modular neural network (BLMNN). First, based on the mutation information and expert knowledge, the easy-to-measure variables which have strong correlations to the effluent water quality parameters are chosen as the model inputs. Then, simulating the modular structure of brain cortex, the effluent water parameters are measured by different sub-models, improving both the modeling accuracy and modeling speed. The simulation results based on real data verify the accuracy and effectiveness of the proposed method.1) 本文责任编委 贺威
-
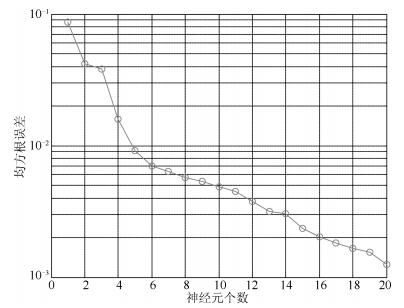
图 3 IErrCor RBF网络学习能力与结构的关系
Fig. 3 Relationship between the learning ability and structure of IErrCor RBF network
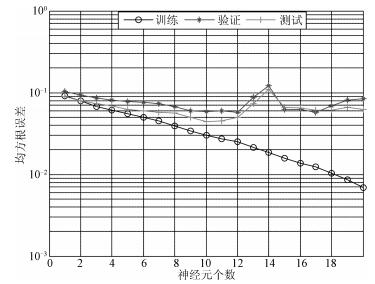
图 6 出水BOD软测量子模型性能与结构间的关系
Fig. 6 Relationship between structure and performance of the effluent BOD soft-measurement sub-model
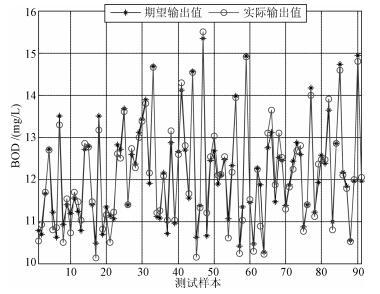
图 7 BLMNN模型出水BOD软测量测试结果
Fig. 7 Testing results of BLMNN soft-measurement model on the effluent BOD
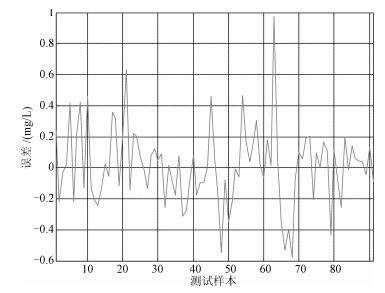
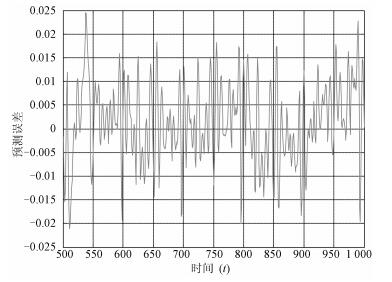
图 8 BLMNN模型出水BOD软测量测试误差
Fig. 8 Testing errors of BLMNN soft-measurement model on the effluent BOD
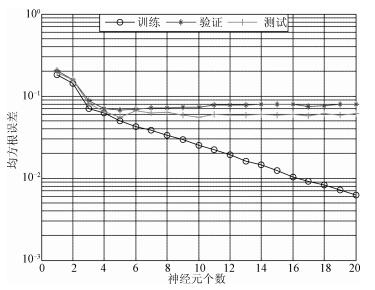
图 9 出水TP软测量子模型性能与结构间的关系
Fig. 9 Relationship between structure and performance of the effluent TP soft-measurement sub-model
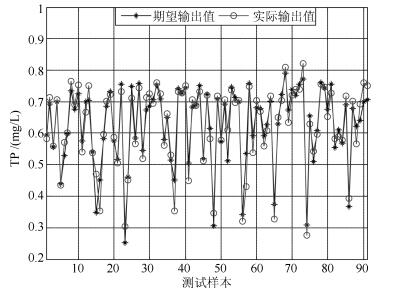
图 10 BLMNN模型出水TP软测量测试结果
Fig. 10 Testing results of BLMNN soft-measurement model on the effluent TP
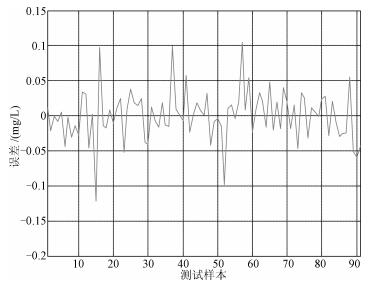
图 11 BLMNN模型出水TP软测量测试误差
Fig. 11 Testing errors of BLMNN soft-measurement model on the effluent TP
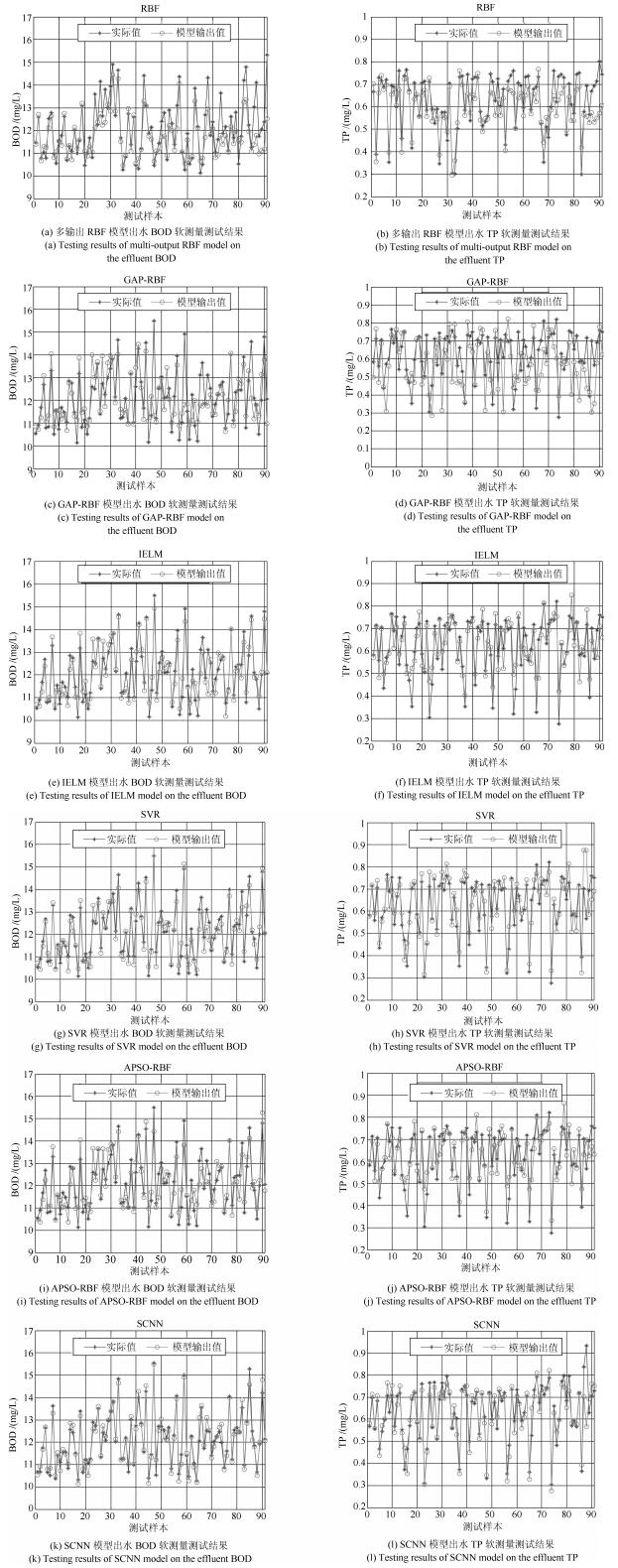
图 12 不同算法对出水TP和出水BOD软测量测试结果
Fig. 12 Testing results of different soft-measurement models on the effluent TP and effluent BOD
表 1 软测量模型候选变量
Table 1 Candidate variables of the soft-measurement model
变量名 单位 变量名 单位 进水PH — 曝气池DO mg/L 出水PH — 进水NH$_{4} $-N mg/L 进水SS mg/L 出水NH$_{4} $-N mg/L 出水SS mg/L 进水色度 (稀释)倍数 进水BOD mg/L 出水色度 (稀释)倍数 出水BOD mg/L 进水总氮 mg/L 进水COD mg/L 出水总氮 mg/L 出水COD mg/L 进水TP mg/L 进水石油类 mg/L 出水TP mg/L 出水石油类 mg/L 进水水温 ℃ 曝气池SV mg/L 出水水温 ℃ 曝气池MLSS mg/L 注:固体悬浮物浓度(Suspended solids, SS); 污泥沉降比(Settling velocity, SV); 混合悬浮固体浓度(Mixed liquid suspended solid, MLSS); 溶解氧(Dissolved oxygen, DO).  下载: 导出CSV
下载: 导出CSV
表 2 软测量模型变量相关性分析
Table 2 Correlation analysis between variables
变量名 与出水BOD相关性 变量名 与出水TP相关性 进水TP 0.5419 出水NH$_{4} $-N 0.4461 出水NH$_{4} $-N 0.4484 出水温度 0.4272 进水BOD(曝气池SV) 0.3806 (0.2492) 进水TP 0.3308 出水石油类 0.3703 DO 0.2516 曝气池MLSS 0.2737 出水油类 0.1890 进水油类 0.2644 进水油类 0.1558
下载: 导出CSV
表 3 Mackey-Glass时间序列预测结果对比
Table 3 Performance comparison of different algorithms on Mackey-Glass prediction
算法 训练时间(s) 训练RMSE 测试RMSE 隐含层神经元数 GDFNN 87.12* / 0.0118* 11* GPFNN 56.14* / 0.0107* 9* SVR 0.169 0.0610 0.0638 17 IELM 0.233 0.0390 0.0365 500 PSO-RBF 859.6* / 0.0208* 12* APSO-RBF 832.7* / 0.0135* 11* IErrCor-RBF 5.683 0.0084 0.0084 5 注: *表示参考原文给出的结果; /表示原文未给出结果.
下载: 导出CSV
表 4 不同算法对出水BOD和出水TP软测量统计结果对比
Table 4 Testing results of different soft measurement models on the effluent TP and effluent BOD
待测变量 算法 平均训练时间(s) 平均测试时间(s) 测试RMSE 测试APE 平均模型结构 最大值 最小值 平均值 最大值 最小值 平均值 出水BOD RBF 12.1913 0.0111 1.3273 0.3587 0.7340 0.0894 0.0216 0.0441 106 GAP-RBF 0.6087 0.0327 0.9266 0.8163 0.8741 0.0502 0.0474 0.0486 17 IELM 0.0673 0.0334 0.5746 0.4319 0.4831 0.0376 0.0298 0.0337 400 SVR 0.0103 0.0019 0.4773 0.2124 0.2826 0.0557 0.0251 0.0348 41 APSO-RBF 211.6412 0.0046 0.5196 0.4270 0.4598 0.0327 0.0291 0.0312 13 SCNN 0.2361 0.0012 0.3576 0.2384 0.2845 0.0234 0.0149 0.0176 57 BLMNN 6.6194 0.0013 0.2992 0.2286 0.2367 0.0179 0.0145 0.0163 10 出水TP RBF 12.1913 0.0111 0.1417 0.0430 0.0697 0.2240 0.0541 0.0969 106 GAP-RBF 1.0027 0.0555 0.1951 0.1076 0.1482 0.2331 0.1413 0.1843 34 IELM 0.0868 0.0653 0.0945 0.0654 0.0783 0.129 0.0967 0.1105 400 SVR 0.0125 0.0034 0.1422 0.0580 0.0950 0.2254 0.0851 0.1430 55 APSO-RBF 222.6349 0.00519 0.0822 0.0556 0.0711 0.1168 0.0759 0.1038 20 SCNN 0.2150 0.0023 0.0993 0.0694 0.0822 0.1084 0.0808 0.0964 42 BLMNN 2.7032 0.0008 0.0426 0.0354 0.0394 0.0565 0.0488 0.0524 5
下载: 导出CSV
-
[1] Shannon M A, Bohn P W, Elimelech M, Georgiadis J G, Mariñas B J, Mayes A M. Science and technology for water purification in the coming decades. Nature, 2008, 452(7185): 301-310 doi: 10.1038/nature06599 [2] van Loosdrecht M C M, Brdjanovic D. Anticipating the next century of wastewater treatment. Science, 2014, 344(6191): 1452-1453 doi: 10.1126/science.1255183 [3] 赵立杰, 袁德成, 柴天佑.基于多分类概率极限学习机的污水处理过程操作工况识别.化工学报, 2012, 63(10): 3173-3182 doi: 10.3969/j.issn.0438-1157.2012.10.024Zhao Li-Jie, Yuan De-Cheng, Chai Tian-You. Identification of wastewater operational conditions based on multi-classification probabilistic extreme learning machine. CIESC Journal, 2012, 63(10): 3173-3182 doi: 10.3969/j.issn.0438-1157.2012.10.024 [4] Jin L Y, Zhang G M, Tian H F. Current state of sewage treatment in China. Water Research, 2014, 66: 85-98 doi: 10.1016/j.watres.2014.08.014 [5] Chon K, Lee Y, Traber J, von Gunten U. Quantification and characterization of dissolved organic nitrogen in wastewater effluents by electrodialysis treatment followed by size-exclusion chromatography with nitrogen detection. Water research, 2013, 47(14): 5381-5391 doi: 10.1016/j.watres.2013.06.019 [6] Huang M Z, Ma Y W, Wan J Q, Chen X H. A sensor-software based on a genetic algorithm-based neural fuzzy system for modeling and simulating a wastewater treatment process. Applied Soft Computing, 2015, 27: 1-10 doi: 10.1016/j.asoc.2014.10.034 [7] Qin X S, Gao F R, Chen G H. Wastewater quality monitoring system using sensor fusion and machine learning techniques. Water Research, 2012, 46(4): 1133-1144 doi: 10.1016/j.watres.2011.12.005 [8] Haimi H, Mulas M, Corona F, Vahala R. Data-derived soft-sensors for biological wastewater treatment plants: an overview. Environmental Modelling & Software, 2013, 47: 88-107 http://cn.bing.com/academic/profile?id=6a74b3b89ff298e1559db44505ff982b&encoded=0&v=paper_preview&mkt=zh-cn [9] Qiu Y, Liu Y Q, Huang D P. Date-driven soft-sensor design for biological wastewater treatment using deep neural networks and genetic algorithms. Journal of Chemical Engineering of Japan, 2016, 49(10): 925-936 doi: 10.1252/jcej.16we016 [10] 余伟, 罗飞, 杨红, 许玉格.基于多神经网络的污水氨氮预测模型.华南理工大学学报(自然科学版), 2010, 38(12): 79-83 doi: 10.3969/j.issn.1000-565X.2010.12.015Yu Wei, Luo Fei, Yang Hong, Xu Yu-Ge. Multiple neural network-based model to predict ammonia nitrogen content in wastewater. Journal of South China University of Technology (Natural Science Edition), 2010, 38(12): 79-83 doi: 10.3969/j.issn.1000-565X.2010.12.015 [11] 蒋朝辉, 董梦林, 桂卫华, 阳春华, 谢永芳.基于Bootstrap的高炉铁水硅含量二维预报.自动化学报, 2016, 42(5): 715-723 http://www.aas.net.cn/CN/abstract/abstract18861.shtmlJiang Zhao-Hui, Dong Meng-Lin, Gui Wei-Hua, Yang Chun-Hua, Xie Yong-Fang. Two-dimensional prediction for silicon content of hot metal of blast furnace based on Bootstrap. Acta Automatica Sinica, 2016, 42(5): 715-723 http://www.aas.net.cn/CN/abstract/abstract18861.shtml [12] Cecati C, Kolbusz J, Różycki P, Siano P, Wilamowski B M. A novel RBF training algorithm for short-term electric load forecasting and comparative studies. IEEE Transactions on industrial Electronics, 2015, 62(10): 6519-6529 doi: 10.1109/TIE.2015.2424399 [13] He S L, Li J. Modeling nonlinear elastic behavior of reinforced soil using artificial neural networks. Applied Soft Computing, 2009, 9(3): 954-961 doi: 10.1016/j.asoc.2008.11.013 [14] Ráduly B, Gernaey K V, Capodaglio A G, Mikkelsen P S, Henze M. Artificial neural networks for rapid WWTP performance evaluation: methodology and case study. Environmental Modelling & Software, 2007, 22(8): 1208-1216 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ023506643/ [15] Bagheri M, Mirbagheri S A, Ehteshami M, Bagheri Z. Modeling of a sequencing batch reactor treating municipal wastewater using multi-layer perceptron and radial basis function artificial neural networks. Process Safety and Environmental Protection, 2015, 93: 111-123 doi: 10.1016/j.psep.2014.04.006 [16] 韩红桂, 乔俊飞, 薄迎春.基于信息强度的RBF神经网络结构设计研究.自动化学报, 2012, 38(7): 1083-1090 http://www.aas.net.cn/CN/abstract/abstract13727.shtmlHan Hong-Gui, Qiao Jun-Fei, Bo Ying-Chun. On structure design for RBF neural network based on information strength. Acta Automatica Sinica, 2012, 38(7): 1083-1090 http://www.aas.net.cn/CN/abstract/abstract13727.shtml [17] Wan J Q, Huang M Z, Ma Y W, Gao W J, Wang Y, Zhang H P, et al. Prediction of effluent quality of a paper mill wastewater treatment using an adaptive network-based fuzzy inference system. Applied Soft Computing, 2011, 11(3): 3238-3246 doi: 10.1016/j.asoc.2010.12.026 [18] Li F J, Qiao J F, Han H G, Yang C L. A self-organizing cascade neural network with random weights for nonlinear system modeling. Applied Soft Computing, 2016, 42: 184-193 doi: 10.1016/j.asoc.2016.01.028 [19] Han H G, Lu W, Hou Y, Qiao J F. An Adaptive-PSO-based self-organizing RBF neural network. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(1): 104-117 doi: 10.1109/TNNLS.2016.2616413 [20] 曾毅, 刘成林, 谭铁牛.类脑智能研究的回顾与展望.计算机学报, 2016, 39(1): 212-222 http://d.old.wanfangdata.com.cn/Periodical/jsjxb201601015Zeng Yi, Liu Cheng-Lin, Tan Tie-Niu. Retrospect and outlook of brain-inspired intelligence research. Chinese Journal of Computers, 2016, 39(1): 212-222 http://d.old.wanfangdata.com.cn/Periodical/jsjxb201601015 [21] Park H J, Friston K. Structural and functional brain networks: from connections to cognition. Science, 2013, 342(6158): 1238411 doi: 10.1126/science.1238411 [22] Meng X, Rozycki P, Qiao J F, Wilamowski B M. Nonlinear system modeling using RBF networks for industrial application. IEEE Transactions on Industrial Informatics, 2018, 14(3): 931-940 doi: 10.1109/TII.2017.2734686 [23] Fernandez de Canete J, del Saz-Orozco P, Baratti R, Mulas M, Ruano A, Garcia-Cerezo A. Soft-sensing estimation of plant effluent concentrations in a biological wastewater treatment plant using an optimal neural network. Expert Systems with Applications, 2016, 63: 8-19 doi: 10.1016/j.eswa.2016.06.028 [24] 汤健, 柴天佑, 刘卓, 余文, 周晓杰.基于更新样本智能识别算法的自适应集成建模.自动化学报, 2016, 42(7): 1040-1052 http://www.aas.net.cn/CN/abstract/abstract18895.shtmlTang Jian, Chai Tian-You, Liu Zhuo, Yu Wen, Zhou Xiao-Jie. Adaptive ensemble modelling approach based on updating sample intelligent identification. Acta Automatica Sinica, 2016, 42(7): 1040-1052 http://www.aas.net.cn/CN/abstract/abstract18895.shtml [25] Xie T T, Yu H, Hewlett J, Rozycki P, Wilamowski B. Fast and efficient second-order method for training radial basis function networks. IEEE Transactions on Neural Networks and Learning Systems, 2012, 23(4): 609-619 doi: 10.1109/TNNLS.2012.2185059 [26] Wu S Q, Er M J, Gao Y. A fast approach for automatic generation of fuzzy rules by generalized dynamic fuzzy neural networks. IEEE Transactions on Fuzzy Systems, 2001, 9(4): 578-594 doi: 10.1109/91.940970 [27] Han H G, Qiao J F. A self-organizing fuzzy neural network based on a growing-and-pruning algorithm. IEEE Transactions on Fuzzy Systems, 2010, 18(6): 1129-1143 doi: 10.1109/TFUZZ.2010.2070841 [28] Cortes C, Vapnik V. Support-vector networks. Machine Learning, 1995, 20(3): 273-297 http://d.old.wanfangdata.com.cn/Periodical/hwyhmb200803006 [29] Huang G B, Chen L, Siew C K. Universal approximation using incremental constructive feedforward networks with random hidden nodes. IEEE Transactions on Neural Networks, 2006, 17(4): 879-892 doi: 10.1109/TNN.2006.875977 [30] Feng H M. Self-generation RBFNs using evolutional PSO learning. Neurocomputing, 2006, 70(1-3): 241-251 doi: 10.1016/j.neucom.2006.03.007 [31] Huang G B, Saratchandran P, Sundararajan N. An efficient sequential learning algorithm for growing and pruning RBF (GAP-RBF) networks. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2004, 34(6): 2284-2292 doi: 10.1109/TSMCB.2004.834428 -

 下载:
下载:



计量
- 文章访问数: 3135
- HTML全文浏览量: 459
- PDF下载量: 639
- 被引次数: 0
