

Study on Process Modelling and Optimizing Based on Interval Number for Gold Hydrometallurgy
-
摘要: 针对黄金湿法冶炼生产过程中某些关键变量不能准确在线测量,导致局部工序无法定量建模、难以基于定量模型实现过程优化控制的问题,提出一种基于区间数的过程分层优化方法.在对黄金湿法冶炼生产过程特点进行分析的基础上,提出了基于区间数的过程分层优化框架.基于专家知识和现场操作人员经验等信息,建立了调浆过程的模糊定性模型.结合氰化浸出和置换等工序的定量模型及调浆过程的定性模型,建立了以综合经济效益最大为优化目标的黄金湿法冶炼生产过程优化模型.针对模糊定性模型的每一输出模态,利用区间数代替无法检测关键变量,提出了基于区间优化和分层优化思想相结合的优化方法,实现了黄金湿法冶炼过程的优化.与传统全流程优化方法的仿真对比实验表明,所提方法在具有不确定性的流程工业生产过程优化中具有一定的应用价值.Abstract: Considering the difficulty of accurate online-measurement of some key variables in gold hydrometallurgy productive process, which results in that the quantitative models of some procedures are difficult to establish and the process optimization control based on the quantitative model is difficult to realize, a process hierarchical optimization method based on the interval number is proposed. Firstly, based on the analysis of the characteristics of gold hydrometallurgy production process, the frame of process hierarchical optimization based on the interval number is proposed. Secondly, based on the knowledge of experts and the experience of field operators, a fuzzy qualitative model of the mixing process is established. By combining the quantitative models of cyanidation leaching process and cementation process with the qualitative model of the mixing process, the optimization model of gold hydrometallurgy production process with the maximum economic benefit as the optimization goal is established. Thirdly, for each output mode of fuzzy qualitative model, the interval numbers are used to instead of the key variables that cannot be measured, and an optimization method based on interval optimization and hierarchical optimization is proposed to realize the gold hydrometallurgy process optimization. Compared with the traditional plant-wide optimization method, the experimental results show that the proposed method has certain application value in the process optimization of industrial production process with uncertainty.1) 本文责任编委 谢永芳
-
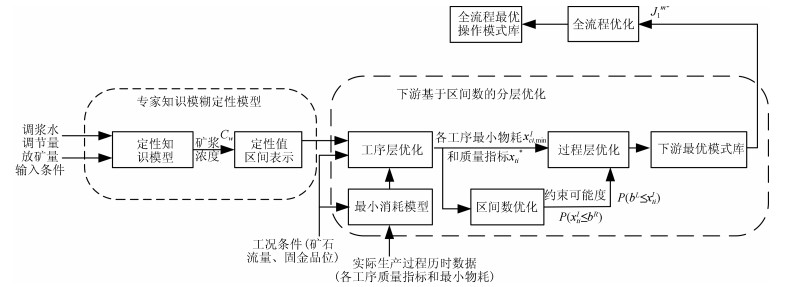
图 5 基于知识的湿法冶金过程优化框架
Fig. 5 Frame of process optimization based on knowledge for hydrometallurgy
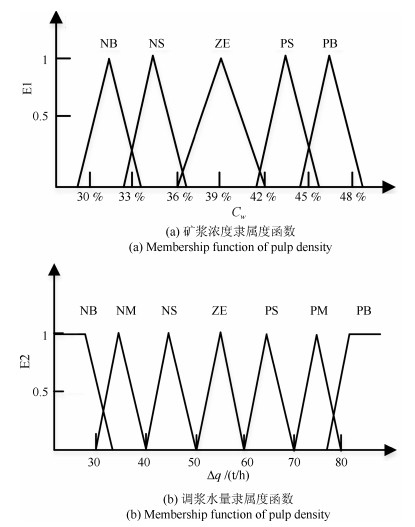
图 6 矿浆浓度E1与调浆水E2的隶属度函数
Fig. 6 Membership functions of pulp density E1 and mixing water E2
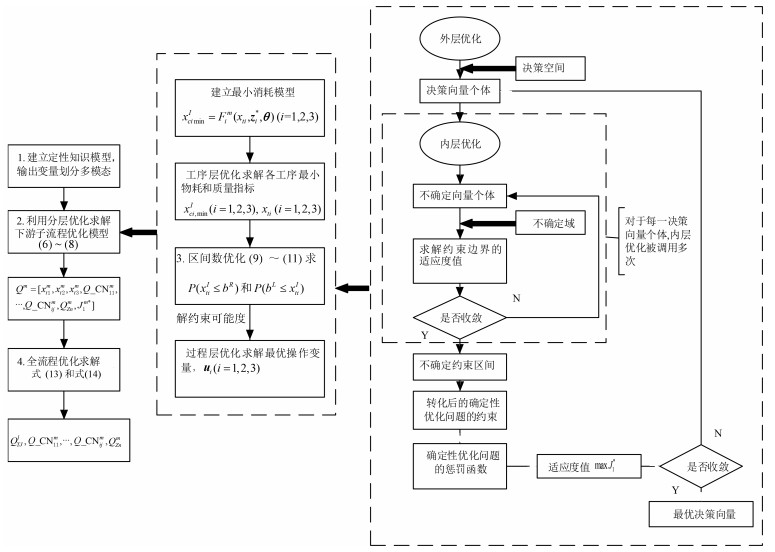
图 7 基于区间数的湿法冶金过程分层优化流程图
Fig. 7 Flow chart of the process hierarchical optimization method based on interval number for hydrometallurgy
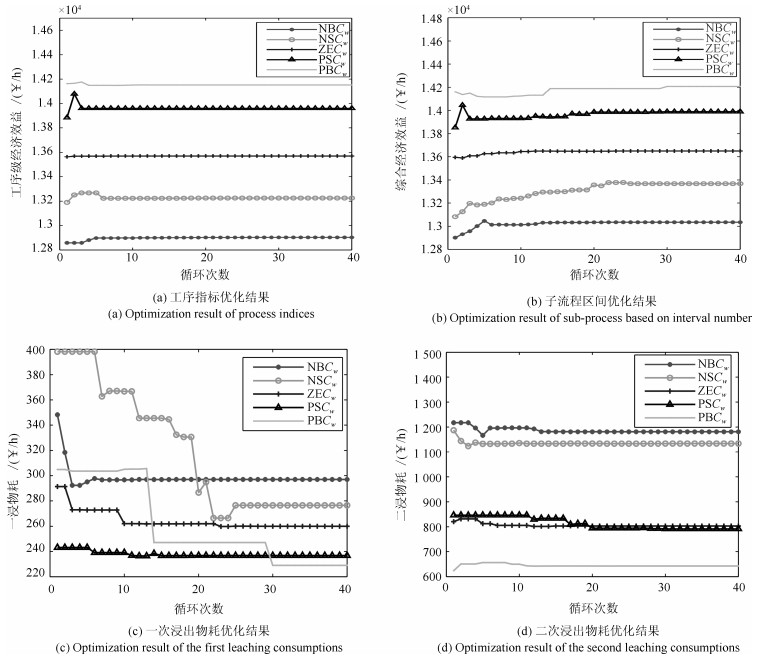
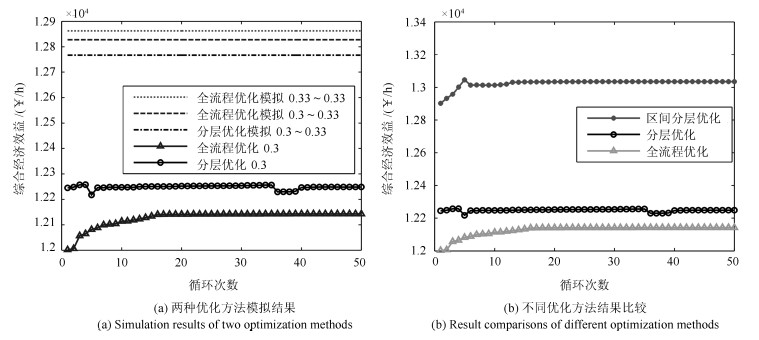
图 8 基于区间数的分层优化结果
Fig. 8 Results of the hierarchical optimization method based on interval number
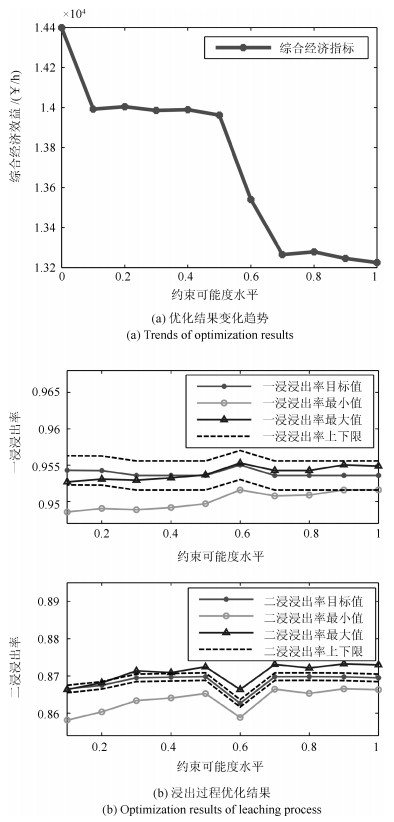
图 10 不同约束可能度水平下的优化结果
Fig. 10 Results of the different constraints possibility degree levels
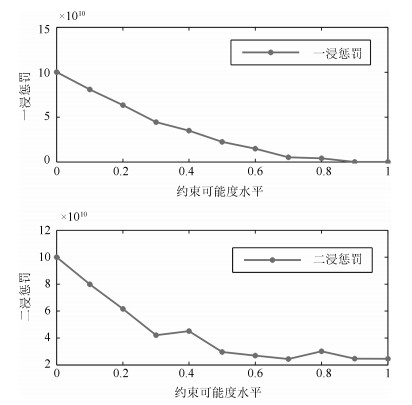
图 11 不同约束可能度水平下的惩罚结果
Fig. 11 Results of penalties under different constraints possibility degree levels
表 1 调浆过程矿浆浓度模糊规则
Table 1 The fuzzy rules for the pulp density of mixing process
ΔM Cw NB NS ZE PS PB NB ZE PS PB PB PB NM ZE ZE PS PB PB NS NS ZE ZE PB PB Δq ZE NB NS ZE PS PB PS NB NB ZE ZE PS PM NB NB NS ZE ZE PB NB NB NB NS ZE  下载: 导出CSV
下载: 导出CSV
表 2 全流程优化模式库
Table 2 Plant-wide optimization pattern base
放矿量 调浆水 矿浆浓度 氰化钠添加量 锌粉添加量 综合经济效益 PB ZE $Q_{{\rm cn}ij}^{\rm {ZE}}$ $Q_{\rm Zn}^{\rm {ZE}}$ $J_2^{\rm {PB, ZE}}=J_1^{\rm {ZE\ast}}-Q_{TJ}^{\rm {PB}}\cdot P_{TJ}$ PB PS PS $Q_{{\rm cn}ij}^{\rm {PS}}$ $Q_{\rm Zn}^{\rm {PS}}$ $J_2^{\rm {PB, PS}}=J_1^{\rm {PS\ast}}-Q_{TJ}^{\rm {PS}}\cdot P_{TJ}$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ NB PB $Q_{{\rm cn}ij}^{\rm {PB}}$ $Q_{\rm Zn}^{\rm {PB}}$ $J_2^{\rm {PB, PB}}=J_1^{\rm {PB}\ast}-Q_{TJ}^{\rm {NB}}\cdot P_{TJ}$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ PB NB $Q_{{\rm cn}ij}^{\rm {NB}}$ $Q_{\rm Zn}^{\rm {NB}}$ $J_2^{\rm {NB, NB}}=J_1^{\rm {NB}\ast}-Q_{TJ}^{\rm {PB}}\cdot P_{TJ}$ NB NS NS $Q_{{\rm cn}ij}^{\rm {NS}}$ $Q_{\rm Zn}^{\rm {NS}}$ $J_2^{\rm {NB, NS}}=J_1^{\rm {NS}\ast}-Q_{TJ}^{\rm {NS}}\cdot P_{TJ}$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ NB ZE $Q_{{\rm cn}ij}^{\rm {ZE}}$ $Q_{\rm Zn}^{\rm {ZE}}$ $J_2^{\rm {NB, ZE}}=J_1^{\rm {ZE}\ast}-Q_{TJ}^{\rm {NB}}\cdot P_{TJ}$
下载: 导出CSV
表 3 模型过程变量及相关参数取值
Table 3 Values of process variables in mechanistic model and relevant parameters
变量 描述 取值 单位 $Q_s$ 矿石流量 2540 $\rm{kg/h}$ $D_{0, r}$ 初始固金品位 666.5 $\rm{mg/kg}$ $D_{0, \rm{Au}}$ 初始液金品位 0.001 $\rm{mg/kg}$ $C_{0, \rm{cn}}$ 初始氰根离子浓度 200 $\rm{mg/kg}$ $P_{\rm {cn}}$ 氰化钠价格 12.8 $\rm{\yen/kg}$ $P_{\rm {Zn}}$ 锌粉价格 22 $\rm{\yen/kg}$ $\mu$ 返金比 0.63 -- $Q_{{\rm cn}, \min}$ 氰化钠添加量最小值 0 $\rm{kg/h}$ $Q_{{\rm cn}, \max}$ 氰化钠添加量最大值 1 000 $\rm{kg/h}$ $Q_{{\rm Zn}, \min}$ 锌粉添加量最小值 0 $\rm{kg/h}$ $Q_{{\rm Zn}, \max}$ 锌粉添加量最大值 10 $\rm{kg/h}$
下载: 导出CSV
表 4 优化结果最优模式库
Table 4 Results of the optimal-pattern base
$C_w$ NB NS ZE PS PB $x_{t1}(\%)$ [0.95340.9584] [0.96000.9617] [0.96070.9633] [0.96520.9682] [0.96520.9681] $x_{t2}(\%)$ [0.86900.8797] [0.87640.8810] [0.86850.8752] [0.86990.8789] [0.87090.8766] $x_{t3}(\%)$ 0.9995 0.9998 0.9996 0.9996 0.9997 $Q_{{\rm cn}11}(\rm{kg/h})$ 22.2048 9.6823 15.9344 15.4914 1.1638 $Q_{{\rm cn}12}(\rm{kg/h})$ 0.4992 11.9133 0.7235 2.5124 16.2312 $Q_{{\rm cn}13}(\rm{kg/h})$ 0.4997 0.0075 3.6585 0.5003 0.5001 $Q_{{\rm cn}21}(\rm{kg/h})$ 47.2695 35.3919 26.0632 23.9628 28.5547 $Q_{{\rm cn}22}(\rm{kg/h})$ 23.9289 40.7431 20.6049 18.5669 9.5077 $Q_{{\rm cn}23}(\rm{kg/h})$ 21.0326 12.4122 16.0905 19.3258 12.1461 $Q_{\rm Zn}(\rm{kg/h})$ 0.3141 0.3154 0.3144 0.3143 0.3148 $J_1^\ast(\rm{\yen/h})$ 13034.7729 13352.1095 13650.3817 13988.9083 14152.2650
下载: 导出CSV
表 5 全流程优化结果
Table 5 Results of plant-wide optimization
$\Delta M$ NB NS ZE PS PB $x_{t1}(\%)$ [0.95340.9584] [0.96000.9617] [0.96070.9633] [0.96520.9682] [0.96520.9681] $x_{t2}(\%)$ [0.86900.8797] [0.87640.8810] [0.86850.8752] [0.86990.8789] [0.87090.8766] $x_{t3}(\%)$ 0.9995 0.9998 0.9996 0.9996 0.9997 $Q_{TJ}^{l}(\rm{t/h})$ 65.3102 70.3546 80.4522 70.8512 75.2547 $Q_{{\rm cn}11}(\rm{kg/h})$ 22.2048 9.6823 15.9344 15.4914 1.1638 $Q_{{\rm cn}12}(\rm{kg/h})$ 0.4992 11.9133 0.7235 2.5124 16.2312 $Q_{{\rm cn}13}(\rm{kg/h})$ 0.4997 0.0075 3.6585 0.5003 0.5001 $Q_{{\rm cn}21}(\rm{kg/h})$ 47.2695 35.3919 26.0632 23.9628 28.5547 $Q_{{\rm cn}22}(\rm{kg/h})$ 23.9289 40.7431 20.6049 18.5669 9.5077 $Q_{{\rm cn}23}(\rm{kg/h})$ 21.0326 12.4122 16.0905 19.3258 12.1461 $Q_{\rm Zn}(\rm{kg/h})$ 0.3141 0.3154 0.3144 0.3143 0.3148 $J_2^\ast(\rm{\yen/h})$ 12806.1872 13105.8684 13368.799 13740.9291 13888.87355
下载: 导出CSV
-
[1] 李康, 王福利, 何大阔, 贾润达.基于数据的湿法冶金全流程操作量优化设定补偿方法.自动化学报, 2017, 43(6):1047-1055 http://www.aas.net.cn/CN/abstract/abstract19080.shtmlLi Kang, Wang Fu-Li, He Da-Kuo, Jia Run-Da. A data-based compensation method for optimal setting of hydrometallurgical process. Acta Automatica Sinica, 2017, 43(6):1047-1055 http://www.aas.net.cn/CN/abstract/abstract19080.shtml [2] 贾润达.湿法冶金萃取过程组分浓度软测量方法的研究与应用[博士学位论文].东北大学, 中国, 2011 http://cdmd.cnki.com.cn/Article/CDMD-10145-1015562284.htmJia Run-Da. Research on soft sensor methods for component concentration in hydrometallurgy extraction process and its applications[Ph.D. dissertation], Northeastern University, China, 2011 http://cdmd.cnki.com.cn/Article/CDMD-10145-1015562284.htm [3] 马恩杰, 柴天佑, 金忠新.确定选矿合理月综合生产指标的智能优化方法.系统工程学报, 2009, 24(2):238-242 http://d.old.wanfangdata.com.cn/Periodical/xtgcxb200902017Ma En-Jie, Chai Tian-You, Jin Zhong-Xin. Intelligent optimization methods for determining rational monthly comprehensive production indices of ore-dressing. Journal of Systems Engineering, 2009, 24(2):238-242 http://d.old.wanfangdata.com.cn/Periodical/xtgcxb200902017 [4] Ding J L, Chai T Y, Wang H. Offline modeling for product quality prediction of mineral processing using modeling error PDF shaping and entropy minimization. IEEE Transactions on Neural Networks, 2011, 22(3):408-419 doi: 10.1109/TNN.2010.2102362 [5] Yu G, Chai T Y, Luo X C. Multiobjective production planning optimization using hybrid evolutionary algorithms for mineral processing. IEEE Transactions on Evolutionary Computation, 2011, 15(4):487-514 doi: 10.1109/TEVC.2010.2073472 [6] de Andrade Lima L R P, Hodouin D. Optimization of reactor volumes for gold cyanidation. Minerals Engineering, 2005, 18(17):671-679 http://www.sciencedirect.com/science/article/pii/S089268750500018X [7] Yuan Q Y, Wang F L, He D K, Jia R D, Wang C. Study on the plant-wide modeling of gold hydrometallurgical process. In: Proceedings of the 26th Chinese Control and Decision Conference. Changsha, China: IEEE, 2014. 4013-4018 http://en.cnki.com.cn/Article_en/CJFDTOTAL-DBDX201303003.htm [8] 白影春.一种求解大不确定性问题的区间优化方法及应用[硕士学位论文].湖南大学, 中国, 2010 http://cdmd.cnki.com.cn/Article/CDMD-10532-2010237842.htmBai Ying-Chun. An interval optimization method and application for solving problems under large uncertainty[Master dissertation], Hunan University, China, 2010 http://cdmd.cnki.com.cn/Article/CDMD-10532-2010237842.htm [9] Zhao C H, Gao F R, Yao Y, Wang F L. A robust calibration modeling strategy for analysis of interference-subject spectral data. AIChE Journal, 2010, 56(1):196-206 http://www.mendeley.com/research/robust-calibration-modeling-strategy-analysis-interference-subject-spectral-data/ [10] Zhao C H. A quality-relevant sequential phase partition approach for regression modeling and quality prediction analysis in manufacturing processes. IEEE Transactions on Automation Science and Engineering, 2014, 11(4):983-991 doi: 10.1109/TASE.2013.2287347 [11] Zhang J, Mao Z Z, Jia R D, He D K. Real time optimization based on a serial hybrid model for gold cyanidation leaching process. Minerals Engineering, 2015, 70:250-263 doi: 10.1016/j.mineng.2014.09.021 [12] Pishvaee B, Munn A, Payne G S. A novel structural model for regulation of clathrin function. The EMBO Journal, 1997, 16(9):2227-2239 doi: 10.1093/emboj/16.9.2227 [13] Wang X J, Yang H F, Qiu Z P. Interval analysis method for damage identification of structures. AIAA Journal, 2010, 48(6):1108-1116 doi: 10.2514/1.45325 [14] Ma Y H, Liang Z C, Chen M, Hong J. Interval analysis of rotor dynamic response with uncertain parameters. Journal of Sound and Vibration, 2013, 332(16):3869-3880 doi: 10.1016/j.jsv.2013.03.001 [15] He D K, Yuan Q Y, Wang F L, Zhao L P, Liu T, Jia R D. Plant-wide hierarchical optimization based on a minimum consumption model. The Canadian Journal of Chemical Engineering, 2016, 94(6):1158-1166 doi: 10.1002/cjce.v94.6 [16] Zhang J, Mao Z Z, Jia R D. Real-time optimization based on SCFO for gold cyanidation leaching process. Chemical Engineering Science, 2015, 134:467-476 doi: 10.1016/j.ces.2015.05.020 [17] Hu G H, Mao Z Z, He D K, Yang F. Hybrid modeling for the prediction of leaching rate in leaching process based on negative correlation learning bagging ensemble algorithm. Computers and Chemical Engineering, 2011, 35(12):2611-2617 doi: 10.1016/j.compchemeng.2011.02.012 [18] Precup R E, Hellendoorn H. A survey on industrial applications of fuzzy control. Computers in Industry, 2011, 62(3):213-226 doi: 10.1016/j.compind.2010.10.001 [19] Zheng J M, Zhao S D, Wei S G. Application of self-tuning fuzzy PID controller for a SRM direct drive volume control hydraulic press. Control Engineering Practice, 2009, 17(12):1398-1404 doi: 10.1016/j.conengprac.2009.07.001 [20] 姜潮.基于区间的不确定性优化理论与算法[博士学位论文].湖南大学, 中国, 2008 http://cdmd.cnki.com.cn/Article/CDMD-10532-2009084284.htmJiang Chao. Theories and Algorithms of Uncertain Optimization Based on Interval[Ph.D. dissertation], Hunan University, China, 2008 http://cdmd.cnki.com.cn/Article/CDMD-10532-2009084284.htm [21] 龚纯, 王正林.精通MATLAB最优化计算.北京:电子工业出版社, 2009. 296-299Gong Chun, Wang Zheng-Lin. To Be Proficient in Matlab Optimization Calculation. Beijing:Publishing House of Electronics Industry, 2009. 296-299 [22] Venkatarayalu N V, Ray T. Optimum design of Yagi-Uda antennas using computational intelligence. IEEE Transactions on Antennas and Propagation, 2004, 52(7):1811-1818 doi: 10.1109/TAP.2004.831338 [23] Liang J J, Suganthan P N. Dynamic multi-swarm particle swarm optimizer. In: Proceedings of the 2005 IEEE International Swarm Intelligence Symposium. Pasadena, CA, USA: IEEE, 2005. 124-129 [24] 邢立宁, 陈英武.基于知识的智能优化引导方法研究进展.自动化学报, 2011, 37(11):1285-1289 http://www.aas.net.cn/CN/abstract/abstract17618.shtmlXing Li-Ning, Chen Ying-Wu. Research progress on intelligent optimization guidance approaches using knowledge. Acta Automatica Sinica, 2011, 37(11):1285-1289 http://www.aas.net.cn/CN/abstract/abstract17618.shtml [25] 李宝磊, 施心陵, 苟常兴, 吕丹桔, 安镇宙, 张榆锋.多元优化算法及其收敛性分析.自动化学报, 2015, 41(5):949-959 http://www.aas.net.cn/CN/abstract/abstract18669.shtmlLi Bao-Lei, Shi Xin-Ling, Gou Chang-Xing, Lv Dan-Ju, An Zhen-Zhou, Zhang Yu-Feng. Multivariant optimization algorithm and its convergence analysis. Acta Automatica Sinica, 2015, 41(5):949-959 http://www.aas.net.cn/CN/abstract/abstract18669.shtml [26] 潘峰, 陈杰, 辛斌, 张娟.粒子群优化方法若干特性分析.自动化学报, 2009, 35(7):1010-1016 doi: 10.1016-j.immuni.2010.12.003/Pan Feng, Chen Jie, Xin Bin, Zhang Juan. Several characteristics analysis of particle swarm optimizer. Acta Automatica Sinica, 2009, 35(7):1010-1016 doi: 10.1016-j.immuni.2010.12.003/ [27] 张丽平, 俞欢军, 陈德钊, 胡上序.粒子群优化算法的分析与改进.信息与控制, 2004, 33(5):513-517 doi: 10.3969/j.issn.1002-0411.2004.05.001Zhang Li-Ping, Yu Huan-Jun, Chen De-Zhao, Hu Shang-Xu. Analysis and improvement of particle swarm optimization algorithm. Information and Control, 2004, 33(5):513-517 doi: 10.3969/j.issn.1002-0411.2004.05.001 -

 下载:
下载:

计量
- 文章访问数: 4203
- HTML全文浏览量: 396
- PDF下载量: 522
- 被引次数: 0
