2018年 第44卷 第4期
2018, 44(4): 577-583.
doi: 10.16383/j.aas.2018.c170616
cstr: 32138.14.j.aas.2018.c170616
摘要:
从路权这个新的角度回顾了过去100年地面交通控制发展的几个关键转变点,并结合目前新兴的网联车和无人车技术,分析了今后50年地面交通控制的发展方向.
从路权这个新的角度回顾了过去100年地面交通控制发展的几个关键转变点,并结合目前新兴的网联车和无人车技术,分析了今后50年地面交通控制的发展方向.



2018, 44(4): 584-607.
doi: 10.16383/j.aas.2018.c160452
cstr: 32138.14.j.aas.2018.c160452
摘要:
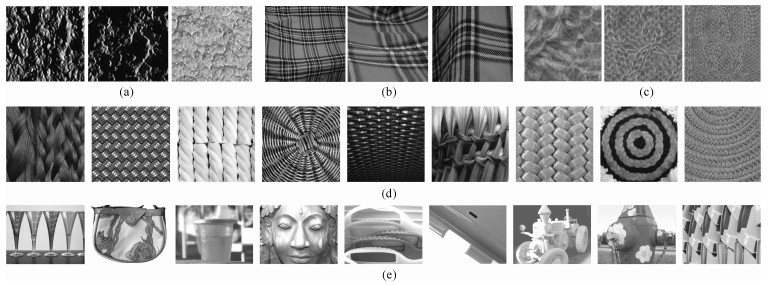
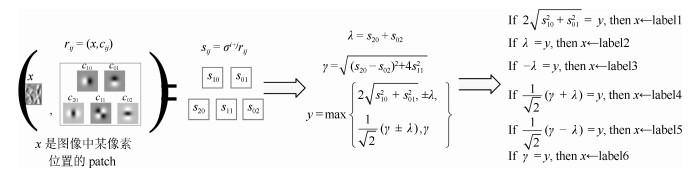
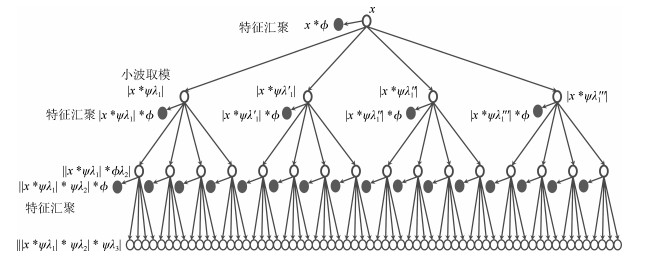
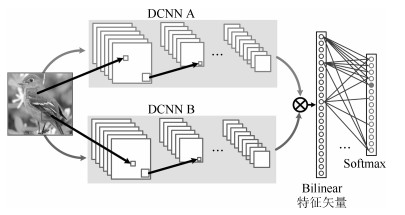
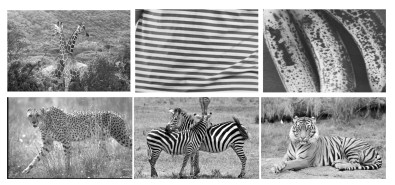
纹理分类是计算机视觉和模式识别领域的一个重要的基本问题,也是图像分割、物体识别、场景理解等其他视觉任务的基础.本文从纹理分类问题的基本定义出发,首先,对纹理分类研究中存在的困难与挑战进行阐述;接下来,对纹理分类方面的典型数据库进行全面梳理和总结;然后,对近期的纹理特征提取方法的发展和现状进行归类总结,并对主流纹理特征提取方法进行了详细的阐述和评述;最后,对纹理分类发展方向进行思考和讨论.
纹理分类是计算机视觉和模式识别领域的一个重要的基本问题,也是图像分割、物体识别、场景理解等其他视觉任务的基础.本文从纹理分类问题的基本定义出发,首先,对纹理分类研究中存在的困难与挑战进行阐述;接下来,对纹理分类方面的典型数据库进行全面梳理和总结;然后,对近期的纹理特征提取方法的发展和现状进行归类总结,并对主流纹理特征提取方法进行了详细的阐述和评述;最后,对纹理分类发展方向进行思考和讨论.








2018, 44(4): 608-618.
doi: 10.16383/j.aas.2017.c160575
cstr: 32138.14.j.aas.2017.c160575
摘要:
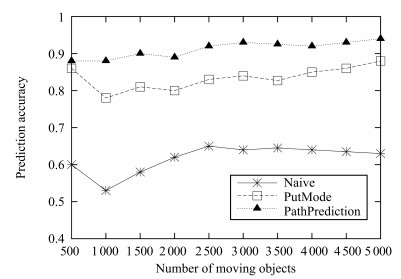
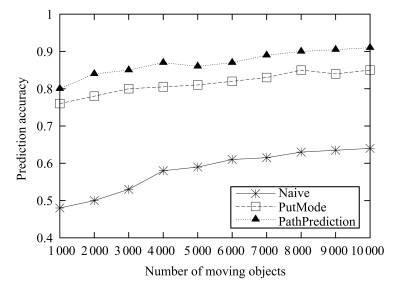
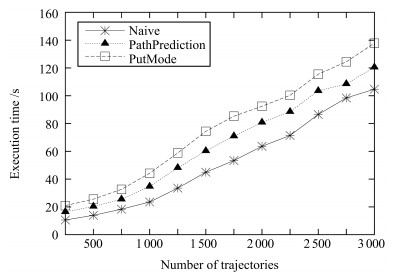
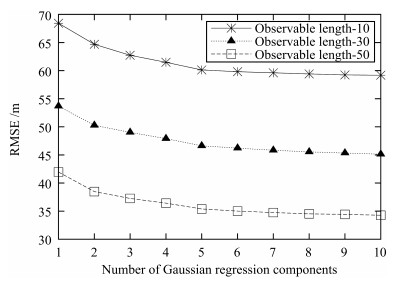
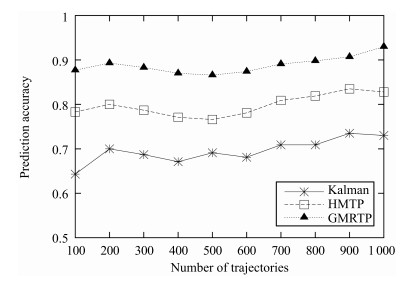
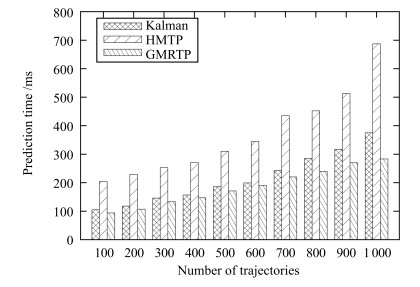
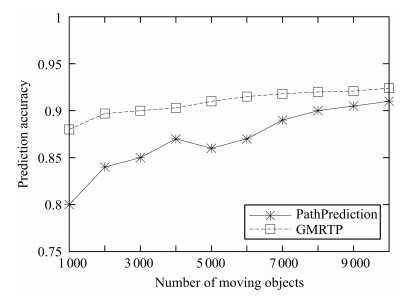
以移动设备、车辆、飞机、飓风等移动对象不确定性轨迹预测问题为背景,将大规模移动对象数据作为研究对象,以频繁轨迹模式挖掘、高斯混合回归技术为主要研究手段,提出多模式移动对象轨迹预测模型,关键技术包括:1)针对单一运动模式,提出一种基于频繁轨迹模式树FTP-tree的轨迹预测方法,利用基于密度的热点区域挖掘算法将轨迹点划分成不同的聚簇,构建轨迹频繁模式树,挖掘频繁轨迹模式预测移动对象连续运动位置.不同数据集上实验结果表明基于FTP-tree的轨迹预测算法在保证时间效率的前提下预测准确性明显优于已有预测算法.2)针对复杂多模式运动行为,利用高斯混合回归方法建模,计算不同运动模式的概率分布,将轨迹数据划分为不同分量,利用高斯过程回归预测移动对象最可能运动轨迹.实验证明,相比于基于隐马尔科夫模型和卡尔曼滤波的预测方法,所提方法具有较高的预测准确性和较低的时间代价.
以移动设备、车辆、飞机、飓风等移动对象不确定性轨迹预测问题为背景,将大规模移动对象数据作为研究对象,以频繁轨迹模式挖掘、高斯混合回归技术为主要研究手段,提出多模式移动对象轨迹预测模型,关键技术包括:1)针对单一运动模式,提出一种基于频繁轨迹模式树FTP-tree的轨迹预测方法,利用基于密度的热点区域挖掘算法将轨迹点划分成不同的聚簇,构建轨迹频繁模式树,挖掘频繁轨迹模式预测移动对象连续运动位置.不同数据集上实验结果表明基于FTP-tree的轨迹预测算法在保证时间效率的前提下预测准确性明显优于已有预测算法.2)针对复杂多模式运动行为,利用高斯混合回归方法建模,计算不同运动模式的概率分布,将轨迹数据划分为不同分量,利用高斯过程回归预测移动对象最可能运动轨迹.实验证明,相比于基于隐马尔科夫模型和卡尔曼滤波的预测方法,所提方法具有较高的预测准确性和较低的时间代价.



2018, 44(4): 619-634.
doi: 10.16383/j.aas.2017.c160707
cstr: 32138.14.j.aas.2017.c160707
摘要:
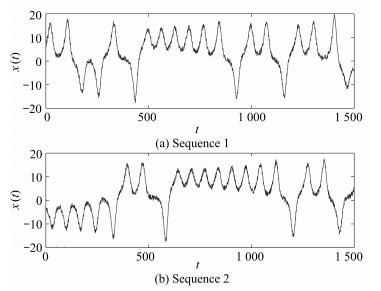
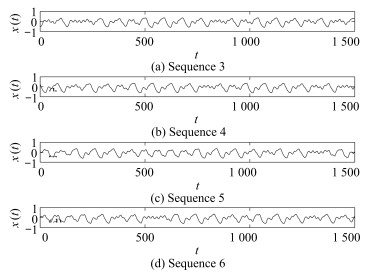
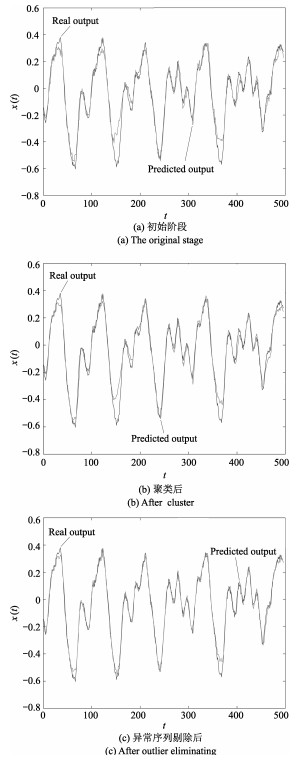
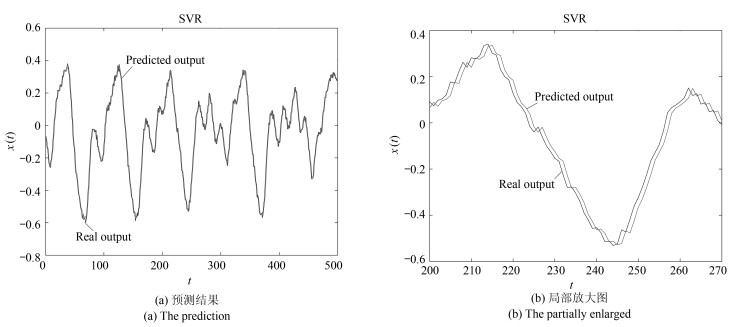
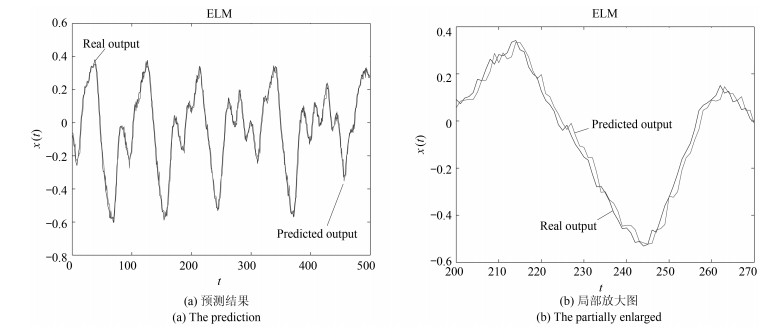
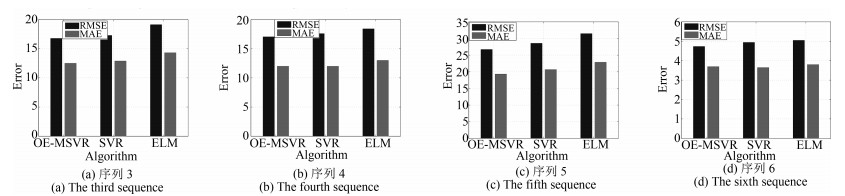
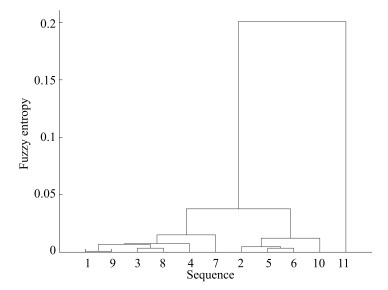
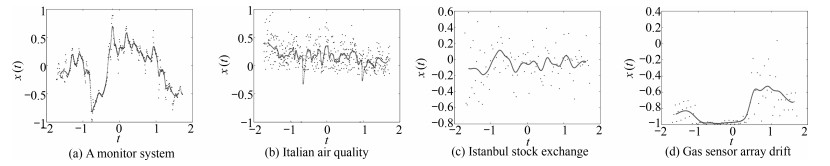
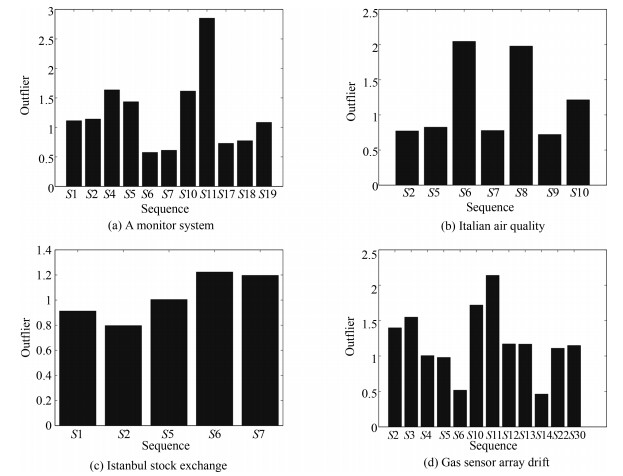
针对传统多变量时间序列预测方法未考虑变量间依赖关系从而影响预测效果的问题,提出了一种基于异常序列剔除的多变量时间序列预测算法.该算法旨在利用多维支持向量回归机(Multi-dimensional support vector regression,M-SVR)内在的结构化输出特性,对选取到具有相似性的多个变量序列进行联合预测.首先,对已知序列进行基于模糊熵的层次聚类,实现对相似序列的初步划分;其次,求出类中所有序列的主曲线,根据序列到主曲线的距离计算各个序列的异常因子,从而进一步剔除聚类结果中的异常序列;最后,将选取到的相似变量序列作为输入,利用M-SVR进行预测.通过理论分析,证明本文算法在理论上存在信息损失上界与可靠度下界,从而说明本文算法的合理性与可行性.采用混沌时间序列数据与多个实际数据集进行对比实验,结果表明,与现有多个代表性方法相比,本文算法可有效挖掘多变量时间序列的内在结构信息,预测精度更高,数值稳定性更好.
针对传统多变量时间序列预测方法未考虑变量间依赖关系从而影响预测效果的问题,提出了一种基于异常序列剔除的多变量时间序列预测算法.该算法旨在利用多维支持向量回归机(Multi-dimensional support vector regression,M-SVR)内在的结构化输出特性,对选取到具有相似性的多个变量序列进行联合预测.首先,对已知序列进行基于模糊熵的层次聚类,实现对相似序列的初步划分;其次,求出类中所有序列的主曲线,根据序列到主曲线的距离计算各个序列的异常因子,从而进一步剔除聚类结果中的异常序列;最后,将选取到的相似变量序列作为输入,利用M-SVR进行预测.通过理论分析,证明本文算法在理论上存在信息损失上界与可靠度下界,从而说明本文算法的合理性与可行性.采用混沌时间序列数据与多个实际数据集进行对比实验,结果表明,与现有多个代表性方法相比,本文算法可有效挖掘多变量时间序列的内在结构信息,预测精度更高,数值稳定性更好.









2018, 44(4): 635-645.
doi: 10.16383/j.aas.2017.c160739
cstr: 32138.14.j.aas.2017.c160739
摘要:
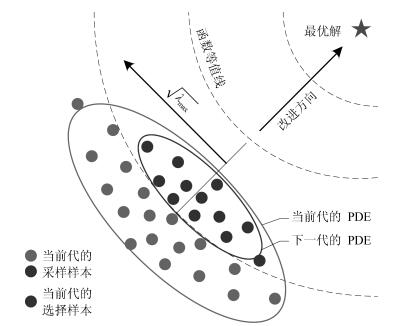
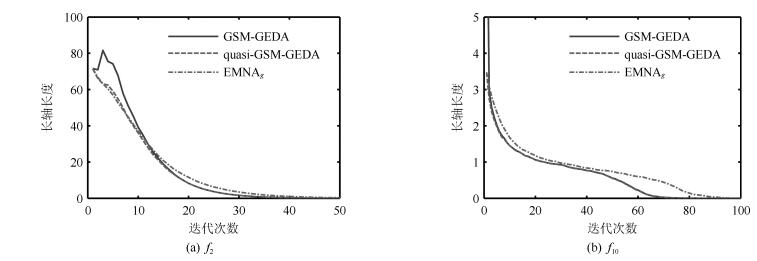
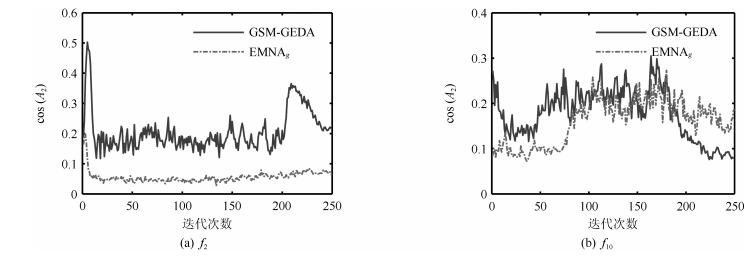
针对传统高斯分布估计算法(Gaussian estimation of distribution algorithms,GEDAs)中变量方差减小速度快、概率密度椭球体(Probability density ellipsoid,PDE)的长轴与目标函数的改进方向相垂直,从而导致算法搜索效率低、容易早熟收敛这一问题,提出一种基于一般二阶混合矩的高斯分布估计算法.该算法利用加权的优秀样本预估高斯均值,并根据沿目标函数的改进方向偏移后的均值来估计协方差矩阵.理论和数值分析表明,这一简单操作可以在不增大算法计算量的前提下自适应地调整概率密度椭球体的位置、大小和长轴方向,提高算法的搜索效率.在14个标准函数上对所提算法进行了测试,由统计出的Cohen's d效应量指标可知该算法的全局寻优能力强于传统高斯分布估计算法;与当前先进的粒子群算法、差分进化算法相比,所提算法可以在相同的函数评价次数内获得9个函数的显著优解.
针对传统高斯分布估计算法(Gaussian estimation of distribution algorithms,GEDAs)中变量方差减小速度快、概率密度椭球体(Probability density ellipsoid,PDE)的长轴与目标函数的改进方向相垂直,从而导致算法搜索效率低、容易早熟收敛这一问题,提出一种基于一般二阶混合矩的高斯分布估计算法.该算法利用加权的优秀样本预估高斯均值,并根据沿目标函数的改进方向偏移后的均值来估计协方差矩阵.理论和数值分析表明,这一简单操作可以在不增大算法计算量的前提下自适应地调整概率密度椭球体的位置、大小和长轴方向,提高算法的搜索效率.在14个标准函数上对所提算法进行了测试,由统计出的Cohen's d效应量指标可知该算法的全局寻优能力强于传统高斯分布估计算法;与当前先进的粒子群算法、差分进化算法相比,所提算法可以在相同的函数评价次数内获得9个函数的显著优解.



2018, 44(4): 646-655.
doi: 10.16383/j.aas.2018.c160847
cstr: 32138.14.j.aas.2018.c160847
摘要:
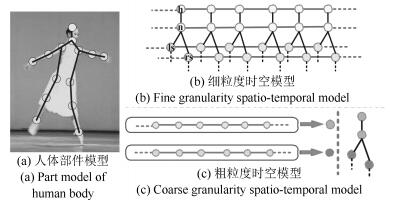
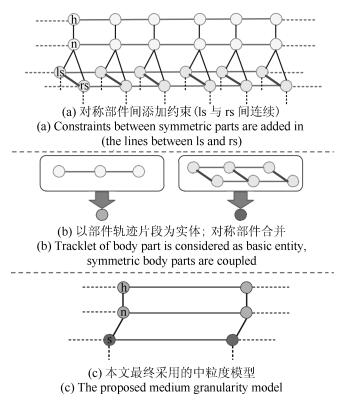
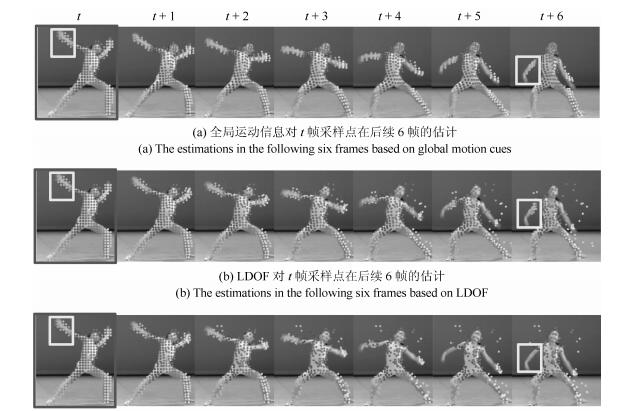
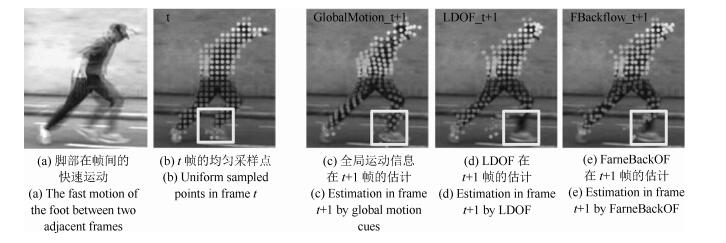
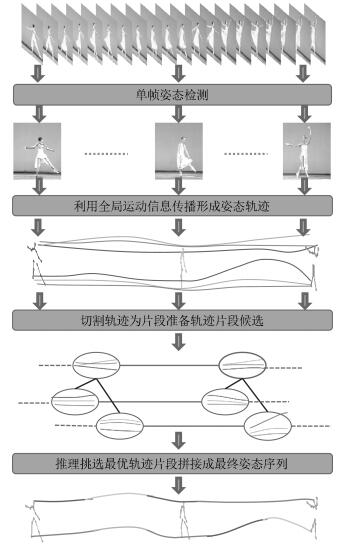
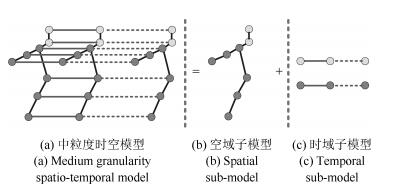
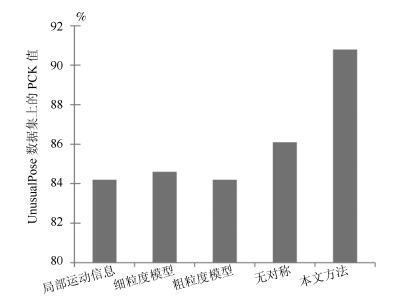
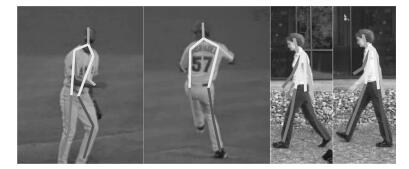
人体姿态估计是计算机视觉领域的一个研究热点,在行为识别、人机交互等领域均有广泛的应用.本文综合粗、细粒度模型的优点,以人体部件轨迹片段为实体构建中粒度时空模型,通过迭代的时域和空域交替解析,完成模型的近似推理,为每一人体部件选择最优的轨迹片段,拼接融合形成最终的人体姿态序列估计.为准备高质量的轨迹片段候选,本文引入全局运动信息将单帧图像中的最优姿态检测结果传播到整个视频形成轨迹,然后将轨迹切割成互相交叠的固定长度的轨迹片段.为解决对称部件易混淆的问题,从概念上将模型中的对称部件合并,在保留对称部件间约束的前提下,消除空域模型中的环路.在三个数据集上的对比实验表明本文方法较其他视频人体姿态估计方法达到了更高的估计精度.
人体姿态估计是计算机视觉领域的一个研究热点,在行为识别、人机交互等领域均有广泛的应用.本文综合粗、细粒度模型的优点,以人体部件轨迹片段为实体构建中粒度时空模型,通过迭代的时域和空域交替解析,完成模型的近似推理,为每一人体部件选择最优的轨迹片段,拼接融合形成最终的人体姿态序列估计.为准备高质量的轨迹片段候选,本文引入全局运动信息将单帧图像中的最优姿态检测结果传播到整个视频形成轨迹,然后将轨迹切割成互相交叠的固定长度的轨迹片段.为解决对称部件易混淆的问题,从概念上将模型中的对称部件合并,在保留对称部件间约束的前提下,消除空域模型中的环路.在三个数据集上的对比实验表明本文方法较其他视频人体姿态估计方法达到了更高的估计精度.


2018, 44(4): 656-666.
doi: 10.16383/j.aas.2017.c160537
cstr: 32138.14.j.aas.2017.c160537
摘要:
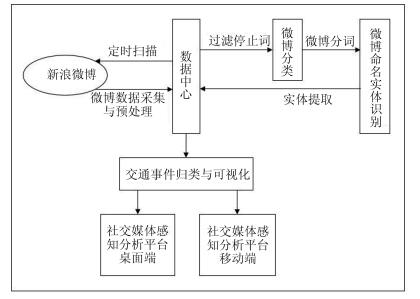
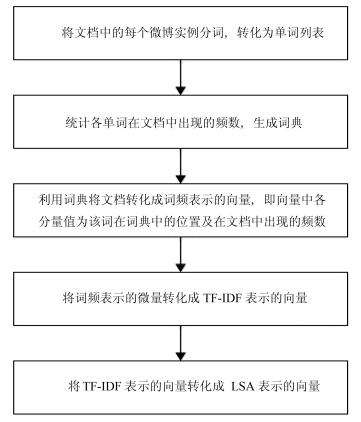
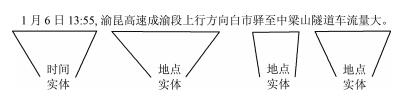
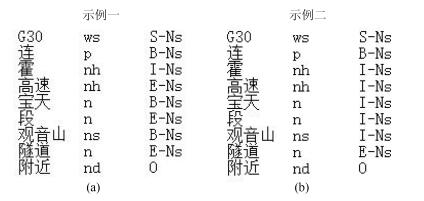
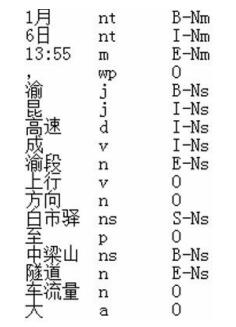
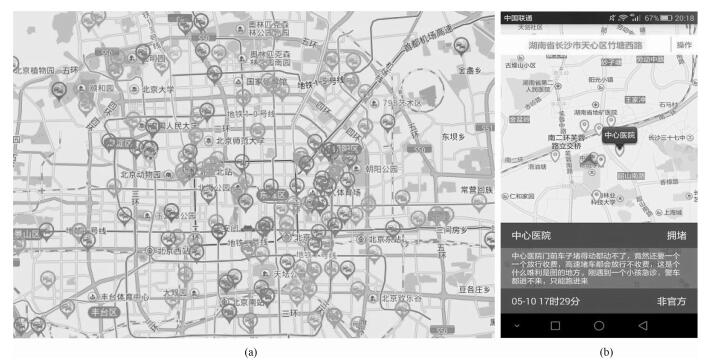
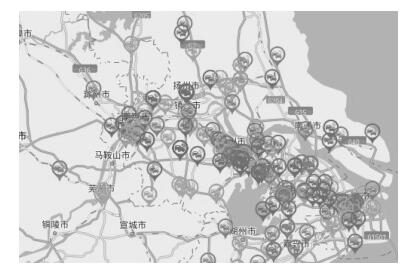
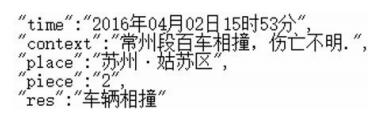
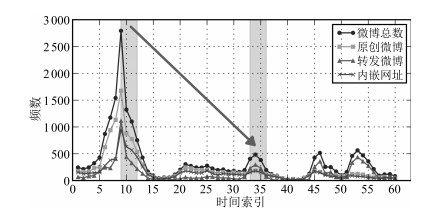
社交媒体数据中蕴含了丰富的交通状态信息,这些信息以人类语言为载体,包含了大量对交通状态的因果分析与多角度描述,可以为传统交通信息采集手段提供有力补充,近年来已成为交通状态感知的重要信息来源.本文以新浪微博为主要数据来源,分别利用支持向量机算法、条件随机场算法以及事件提取模型完成微博的分类、命名实体识别与交通事件提取,开发了基于社交媒体大数据的交通感知分析与可视化系统,可以为交通管理部门及时提供交通舆情及突发交通事件的态势、影响范围、起因等信息.在交通信息采集系统建设较为薄弱的地区,本文建立的系统可以为交通管理提供信息补充.
社交媒体数据中蕴含了丰富的交通状态信息,这些信息以人类语言为载体,包含了大量对交通状态的因果分析与多角度描述,可以为传统交通信息采集手段提供有力补充,近年来已成为交通状态感知的重要信息来源.本文以新浪微博为主要数据来源,分别利用支持向量机算法、条件随机场算法以及事件提取模型完成微博的分类、命名实体识别与交通事件提取,开发了基于社交媒体大数据的交通感知分析与可视化系统,可以为交通管理部门及时提供交通舆情及突发交通事件的态势、影响范围、起因等信息.在交通信息采集系统建设较为薄弱的地区,本文建立的系统可以为交通管理提供信息补充.
2018, 44(4): 667-675.
doi: 10.16383/j.aas.2017.c160181
cstr: 32138.14.j.aas.2017.c160181
摘要:
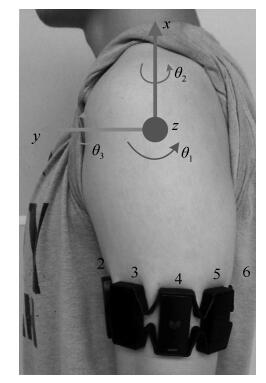
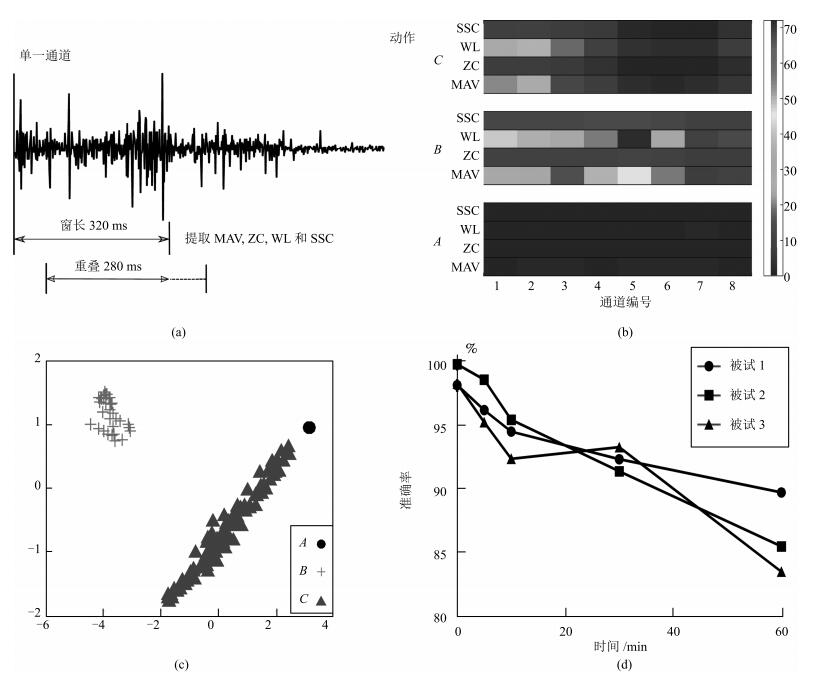
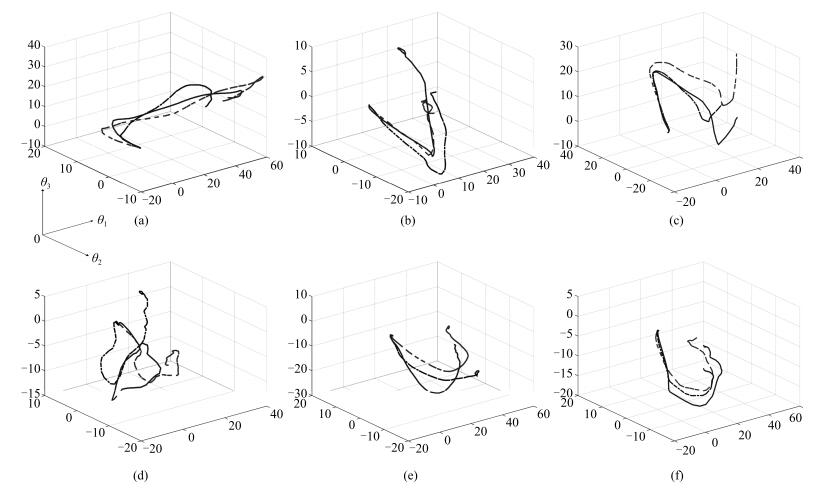
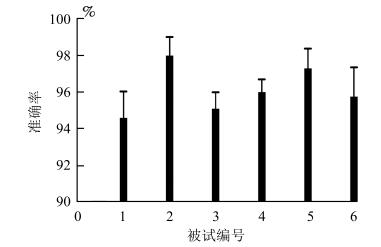
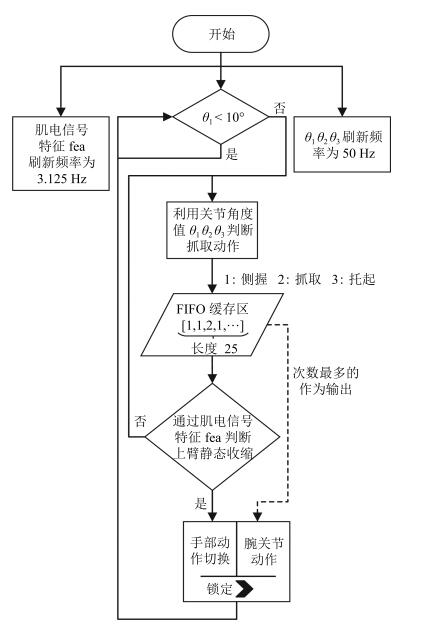
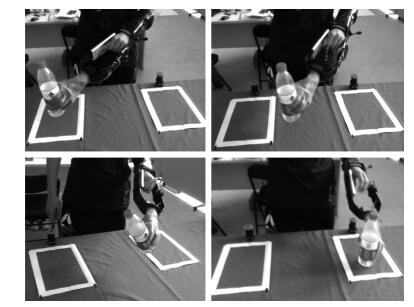
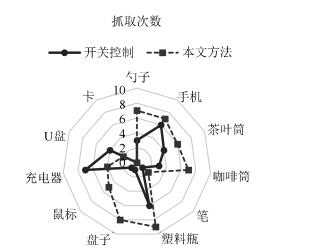
肌电信号的采集易受到空气湿度和皮肤表面汗液等多种随机因素的干扰,使采集到的肌电信号极不稳定.为了应对此问题,市售的肌电假肢普遍采用基于开关量的控制方法,但是开关量对多自由度假肢的控制依赖于顺序动作切换,这使得假肢的实际使用过程比较繁琐.利用肢体运动学信息的假肢控制方法常见于下肢假肢,这是因为上肢的运动受抓取物体的形状和位置等因素变化,其肢体运动的规律性较差.本文提出一种利用上臂关节角度和肌电信号的控制方法,利用人体在抓握时肩关节的运动模式区分使用者对不同形状物体的抓握,并将此方法应用在二自由度假肢的控制中.通过与开关量控制的假肢在日常物品抓握实验中的对比,表明本文所提出方法在稳定性和使用效率方面都优于开关量控制的方式.
肌电信号的采集易受到空气湿度和皮肤表面汗液等多种随机因素的干扰,使采集到的肌电信号极不稳定.为了应对此问题,市售的肌电假肢普遍采用基于开关量的控制方法,但是开关量对多自由度假肢的控制依赖于顺序动作切换,这使得假肢的实际使用过程比较繁琐.利用肢体运动学信息的假肢控制方法常见于下肢假肢,这是因为上肢的运动受抓取物体的形状和位置等因素变化,其肢体运动的规律性较差.本文提出一种利用上臂关节角度和肌电信号的控制方法,利用人体在抓握时肩关节的运动模式区分使用者对不同形状物体的抓握,并将此方法应用在二自由度假肢的控制中.通过与开关量控制的假肢在日常物品抓握实验中的对比,表明本文所提出方法在稳定性和使用效率方面都优于开关量控制的方式.



2018, 44(4): 676-684.
doi: 10.16383/j.aas.2017.c160218
cstr: 32138.14.j.aas.2017.c160218
摘要:
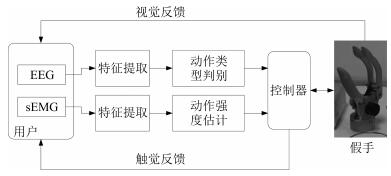
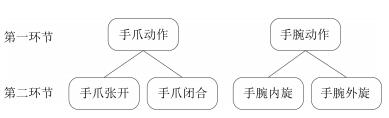
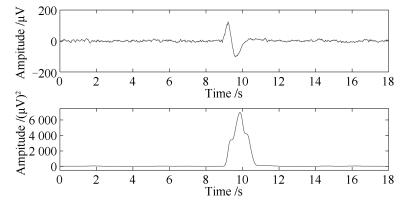
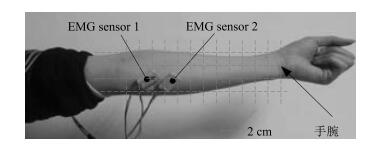
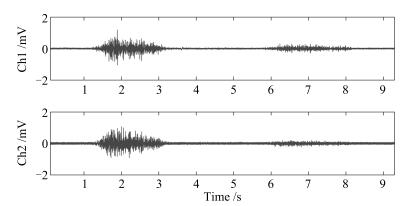
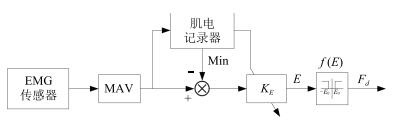
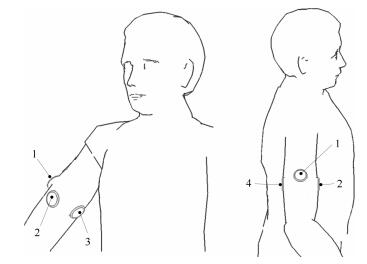
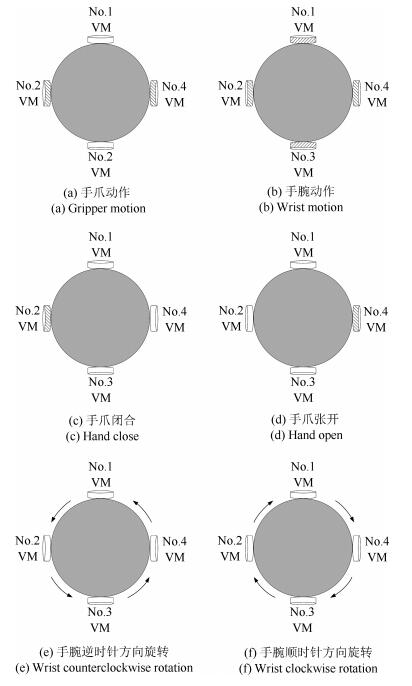
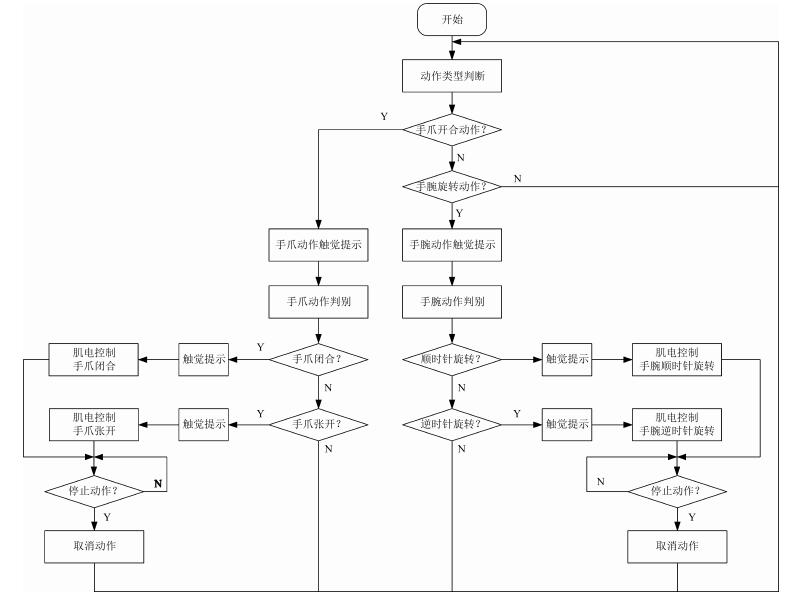
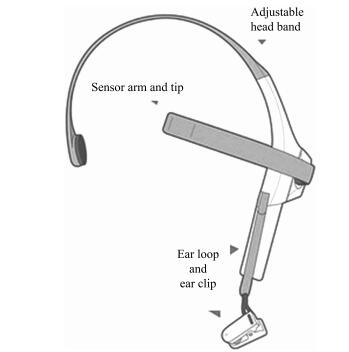
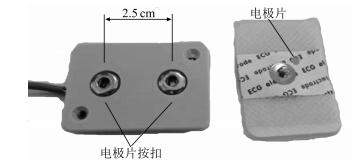
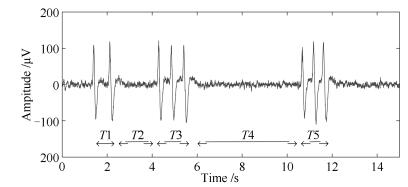
针对残臂较短或残臂上肌电信号测量点较少的残疾人使用多自由度假手的需求,提出一种基于脑电信号(Electroencephalogram,EEG)和表面肌电信号(Surface electromyogram signal,sEMG)协同处理的假手控制策略.该方法仅用1个肌电传感器和1个脑电传感器实现多自由度假手的控制.采用1个脑电传感器测量人体前额部位的EEG,从测量得到的EEG中提取出眨眼动作信息并将其用于假手动作的编码;采用1个肌电传感器测量手臂上的sEMG,并针对肌电信号存在个体差异和位置差异的问题,采用自适应方法实现手部动作强度的估计;采用振动触觉技术设计触觉编码用于将当前假手的控制指令反馈给佩戴者,从而实现EEG和sEMG对多自由度假手的协同控制.为验证该控制策略的有效性进行了实验研究,结果表明,提出的假手控制策略是有效的.
针对残臂较短或残臂上肌电信号测量点较少的残疾人使用多自由度假手的需求,提出一种基于脑电信号(Electroencephalogram,EEG)和表面肌电信号(Surface electromyogram signal,sEMG)协同处理的假手控制策略.该方法仅用1个肌电传感器和1个脑电传感器实现多自由度假手的控制.采用1个脑电传感器测量人体前额部位的EEG,从测量得到的EEG中提取出眨眼动作信息并将其用于假手动作的编码;采用1个肌电传感器测量手臂上的sEMG,并针对肌电信号存在个体差异和位置差异的问题,采用自适应方法实现手部动作强度的估计;采用振动触觉技术设计触觉编码用于将当前假手的控制指令反馈给佩戴者,从而实现EEG和sEMG对多自由度假手的协同控制.为验证该控制策略的有效性进行了实验研究,结果表明,提出的假手控制策略是有效的.




2018, 44(4): 685-695.
doi: 10.16383/j.aas.2017.c160481
cstr: 32138.14.j.aas.2017.c160481
摘要:
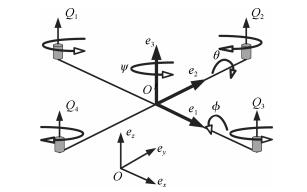
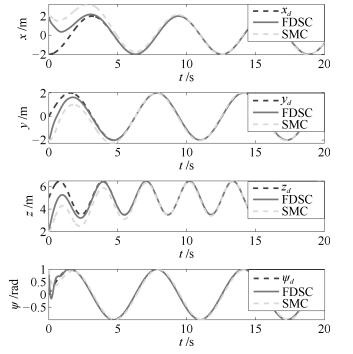
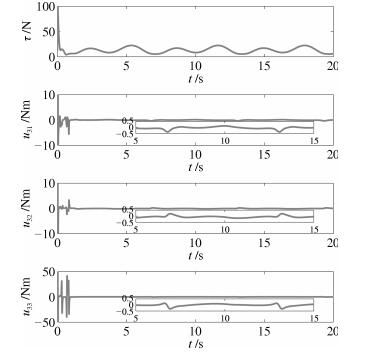
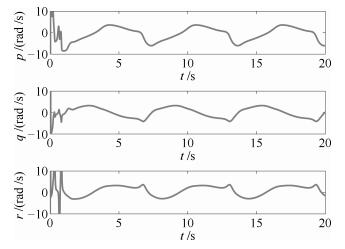
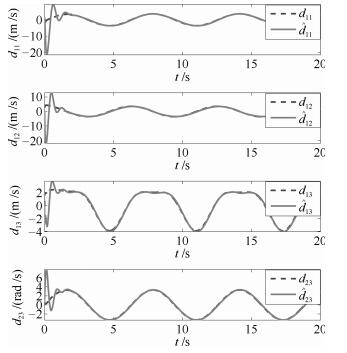
针对具有未知外界扰动和系统不确定性的四旋翼飞行器,提出了一种基于模糊不确定观测器(Fuzzy uncertainty observer,FUO)的自适应动态面轨迹跟踪控制方法.通过将四旋翼飞行器系统分解为位置、姿态角和角速率三个动态子系统,使得各子系统虚拟控制器能够充分考虑欠驱动约束;采用一阶低通滤波器重构虚拟控制信号及其一阶导数,实现四旋翼跟踪控制设计的迭代解耦;设计了一种模糊不确定观测器,用以估计和补偿未知外界扰动与系统不确定性,从而确保闭环系统的稳定性和跟踪误差与其他系统信号的一致有界性.仿真研究验证了所提出的控制方法的有效性和优越性.
针对具有未知外界扰动和系统不确定性的四旋翼飞行器,提出了一种基于模糊不确定观测器(Fuzzy uncertainty observer,FUO)的自适应动态面轨迹跟踪控制方法.通过将四旋翼飞行器系统分解为位置、姿态角和角速率三个动态子系统,使得各子系统虚拟控制器能够充分考虑欠驱动约束;采用一阶低通滤波器重构虚拟控制信号及其一阶导数,实现四旋翼跟踪控制设计的迭代解耦;设计了一种模糊不确定观测器,用以估计和补偿未知外界扰动与系统不确定性,从而确保闭环系统的稳定性和跟踪误差与其他系统信号的一致有界性.仿真研究验证了所提出的控制方法的有效性和优越性.



2018, 44(4): 696-706.
doi: 10.16383/j.aas.2017.c160439
cstr: 32138.14.j.aas.2017.c160439
摘要:
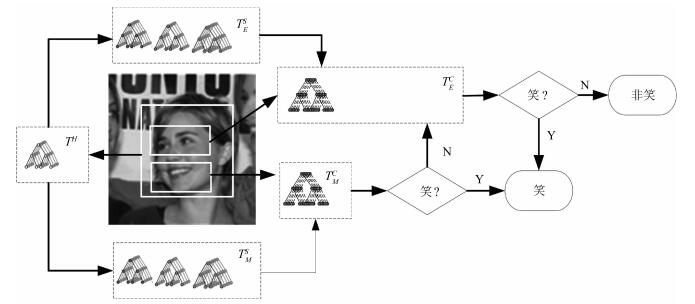
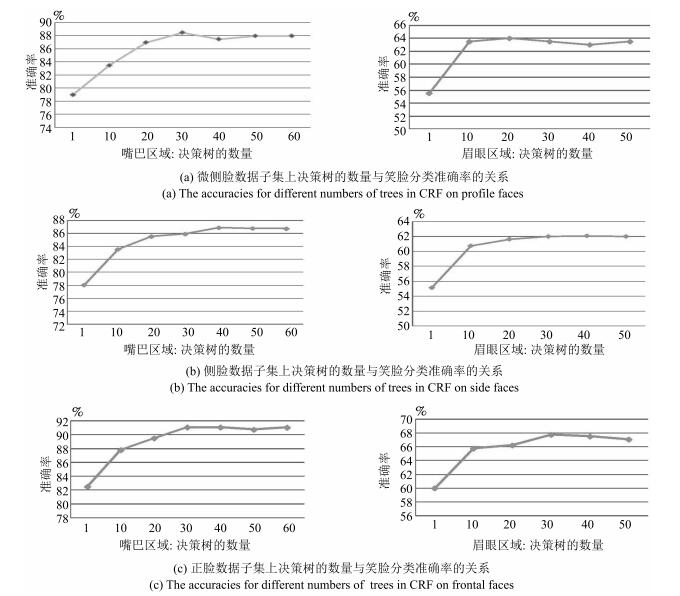
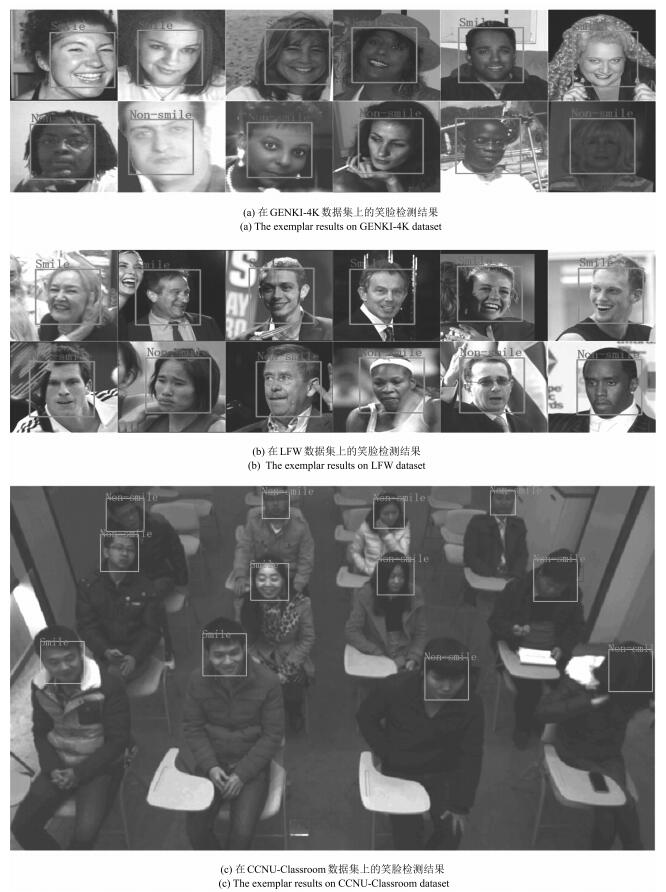
为减少非约束环境下头部姿态多样性对笑脸检测带来的不利影响,提出一种基于条件随机森林(Conditional random forests,CRF)的笑脸检测方法.首先,以头部姿态作为隐含条件划分数据空间,构建基于条件随机森林的笑脸分类器;其次,以K-Means聚类方法确定条件随机森林分类器的分类边界;最后,分别从嘴巴区域和眉眼区域采集图像子块训练两组条件随机森林构成层级式结构进行笑脸检测.本文的笑脸检测方法在GENKI-4K、LFW和自备课堂场景(CCNU-Classroom)数据集上分别取得了91.14%,90.73%和85.17%的正确率,优于现有基于支持向量机、AdaBoost和随机森林的笑脸检测方法.
为减少非约束环境下头部姿态多样性对笑脸检测带来的不利影响,提出一种基于条件随机森林(Conditional random forests,CRF)的笑脸检测方法.首先,以头部姿态作为隐含条件划分数据空间,构建基于条件随机森林的笑脸分类器;其次,以K-Means聚类方法确定条件随机森林分类器的分类边界;最后,分别从嘴巴区域和眉眼区域采集图像子块训练两组条件随机森林构成层级式结构进行笑脸检测.本文的笑脸检测方法在GENKI-4K、LFW和自备课堂场景(CCNU-Classroom)数据集上分别取得了91.14%,90.73%和85.17%的正确率,优于现有基于支持向量机、AdaBoost和随机森林的笑脸检测方法.

2018, 44(4): 707-718.
doi: 10.16383/j.aas.2017.c160468
cstr: 32138.14.j.aas.2017.c160468
摘要:
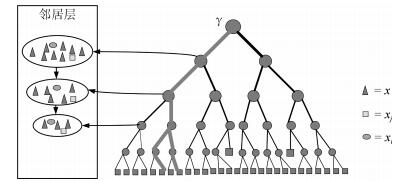
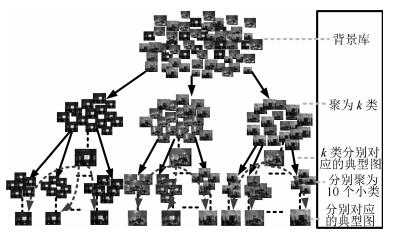
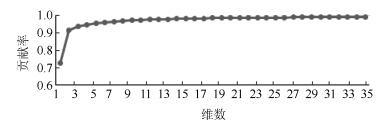
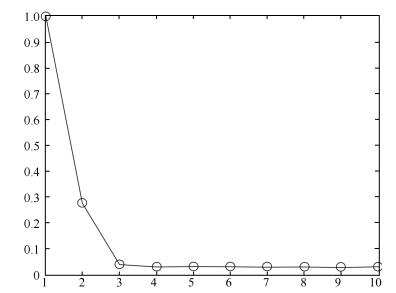
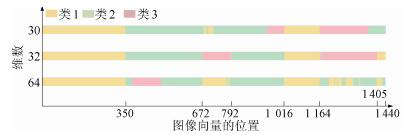
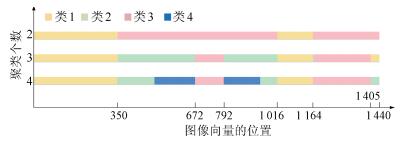
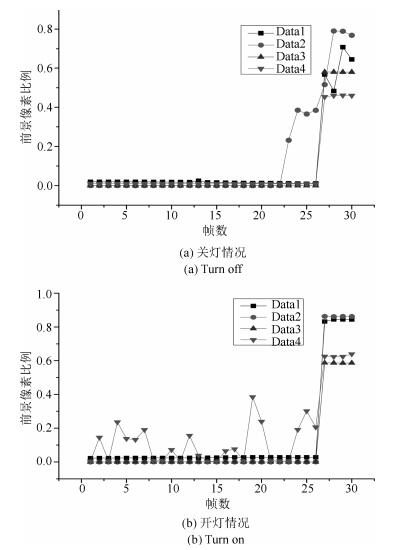
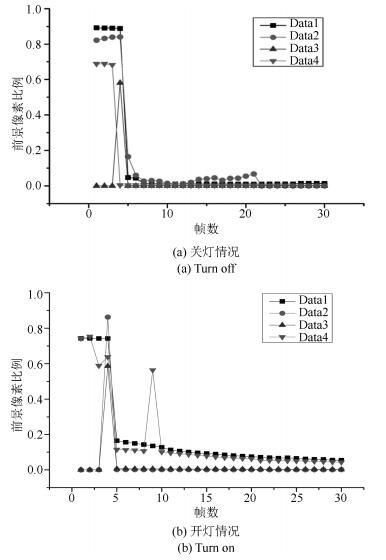
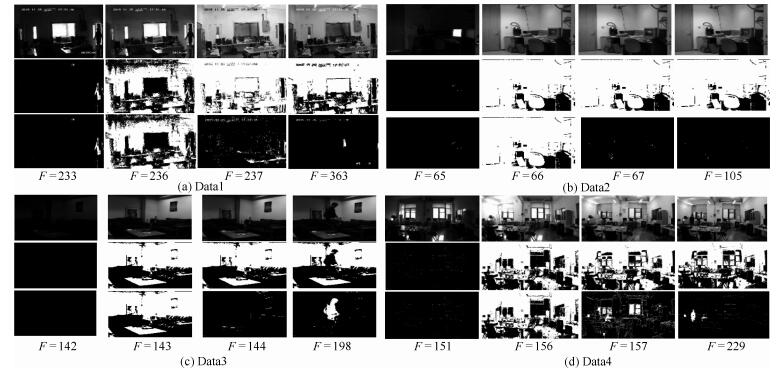
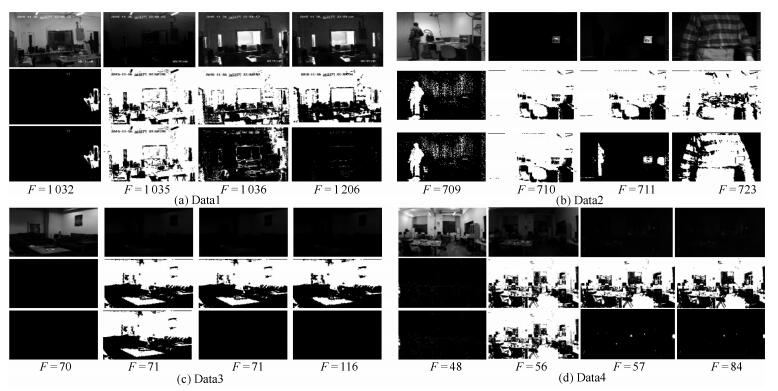
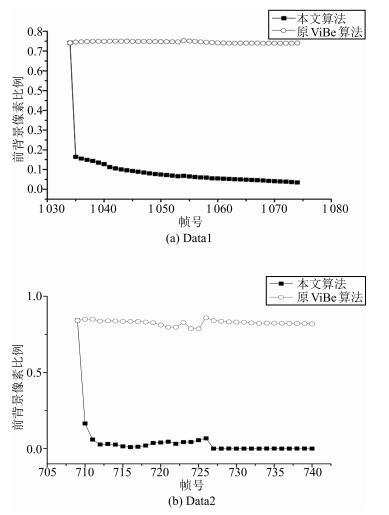
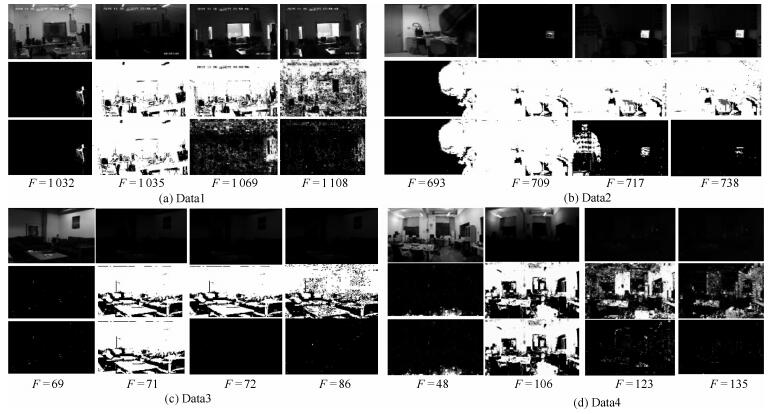
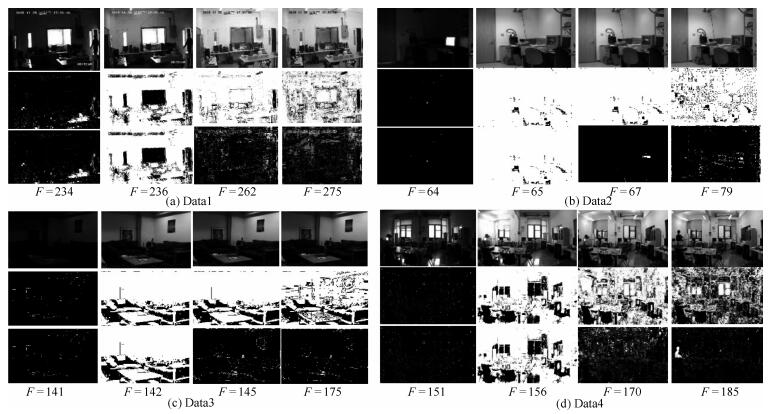
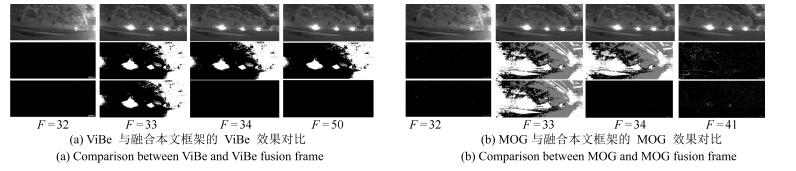
针对现有背景建模算法难以处理场景非平稳变化的问题,提出一种基于长时间视频序列的背景建模方法.该方法包括训练、检索、更新三个主要步骤.在训练部分,首先将长时间视频分段剪辑并计算对应的背景图,然后通过图像降采样和降维找到背景描述子,并利用聚类算法对背景描述子进行分类,生成背景记忆字典.在检索部分,利用前景像素比例设计非平稳状态判断机制,如果发生非平稳变换,则计算原图描述子与背景字典中描述子之间的距离,距离最近的背景描述子对应的背景图片即为此时背景.在更新部分,利用前景像素比例设计更新判断机制,如果前景比例始终过大,则生成新背景,并更新背景字典以及背景图库.当出现非平稳变化时(如光线突变),本算法能够将背景模型恢复问题转化为背景检索问题,确保背景模型的稳定获得.将该框架与短时空域信息背景模型(以ViBe、MOG为例)融合,重点测试非平稳变化场景下的背景估计和运动目标检测结果.在多个视频序列上的测试结果表明,该框架可有效处理非平稳变化,有效改善目标检测效果,显著降低误检率.
针对现有背景建模算法难以处理场景非平稳变化的问题,提出一种基于长时间视频序列的背景建模方法.该方法包括训练、检索、更新三个主要步骤.在训练部分,首先将长时间视频分段剪辑并计算对应的背景图,然后通过图像降采样和降维找到背景描述子,并利用聚类算法对背景描述子进行分类,生成背景记忆字典.在检索部分,利用前景像素比例设计非平稳状态判断机制,如果发生非平稳变换,则计算原图描述子与背景字典中描述子之间的距离,距离最近的背景描述子对应的背景图片即为此时背景.在更新部分,利用前景像素比例设计更新判断机制,如果前景比例始终过大,则生成新背景,并更新背景字典以及背景图库.当出现非平稳变化时(如光线突变),本算法能够将背景模型恢复问题转化为背景检索问题,确保背景模型的稳定获得.将该框架与短时空域信息背景模型(以ViBe、MOG为例)融合,重点测试非平稳变化场景下的背景估计和运动目标检测结果.在多个视频序列上的测试结果表明,该框架可有效处理非平稳变化,有效改善目标检测效果,显著降低误检率.



2018, 44(4): 719-729.
doi: 10.16383/j.aas.2017.c160534
cstr: 32138.14.j.aas.2017.c160534
摘要:
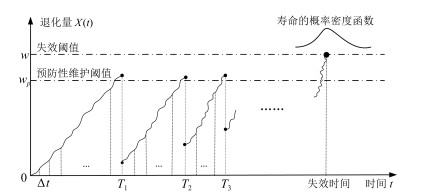
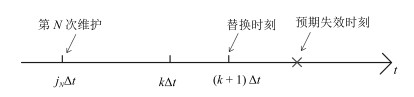
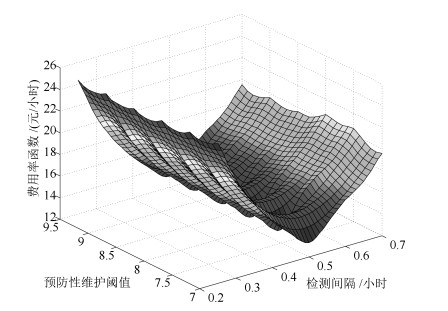
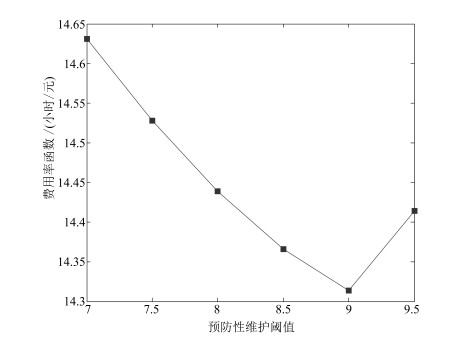
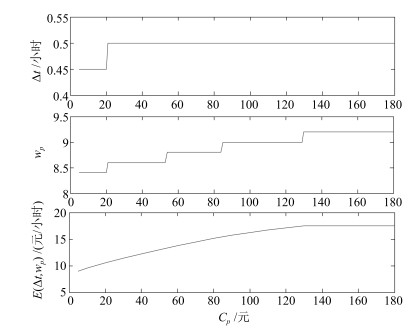
基于剩余寿命预测信息进行设备维护决策的研究中,现有方法通常仅考虑不完美维护对退化量或退化率的单一影响,忽略了不完美维护对两者的双重影响.鉴于此,针对随机退化设备,提出一种考虑不完美维护影响的性能退化模型与维护决策模型,融合了维护活动对设备退化量和退化率的双重影响.首先基于Wiener过程分阶段构建存在不完美维护干预的随机退化模型,在首达时间的意义下推导出剩余寿命的解析概率分布;然后基于剩余寿命的预测结果,以检测间隔和预防性维护阈值为决策变量建立维护决策模型;最后数值仿真实验验证了本文模型的有效性,并对费用参数进行了敏感性分析.实验结果表明本文模型具有潜在的工程应用价值.
基于剩余寿命预测信息进行设备维护决策的研究中,现有方法通常仅考虑不完美维护对退化量或退化率的单一影响,忽略了不完美维护对两者的双重影响.鉴于此,针对随机退化设备,提出一种考虑不完美维护影响的性能退化模型与维护决策模型,融合了维护活动对设备退化量和退化率的双重影响.首先基于Wiener过程分阶段构建存在不完美维护干预的随机退化模型,在首达时间的意义下推导出剩余寿命的解析概率分布;然后基于剩余寿命的预测结果,以检测间隔和预防性维护阈值为决策变量建立维护决策模型;最后数值仿真实验验证了本文模型的有效性,并对费用参数进行了敏感性分析.实验结果表明本文模型具有潜在的工程应用价值.



2018, 44(4): 730-742.
doi: 10.16383/j.aas.2017.c160564
cstr: 32138.14.j.aas.2017.c160564
摘要:
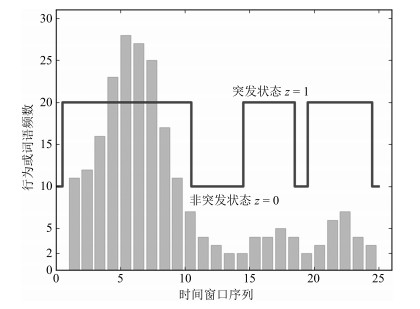
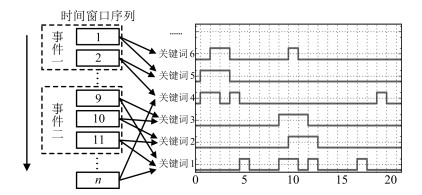
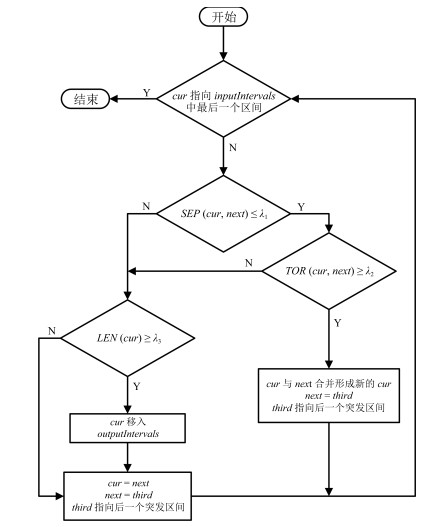
社交网络与人们的生活息息相关,其上的用户行为可用于检测社交网络中的事件突发性,进而准确定位事件的发生区间.但用户行为易受主观及外部因素的影响,有时会出现隐式事件突发性,给事件突发性检测带来困难.本文针对社交网络中的隐式事件突发性问题,在以社交行为特征进行事件突发性检测的基础上,引入关键词特征,动态调整各个时间窗口的候选关键词,将不同事件与不同的关键词特征绑定,避免事件之间及噪音带来的干扰,实现对隐式事件突发性的准确识别.相关实验表明,本文提出的算法可有效改善现有社交网络中事件突发性检测任务的效果.
社交网络与人们的生活息息相关,其上的用户行为可用于检测社交网络中的事件突发性,进而准确定位事件的发生区间.但用户行为易受主观及外部因素的影响,有时会出现隐式事件突发性,给事件突发性检测带来困难.本文针对社交网络中的隐式事件突发性问题,在以社交行为特征进行事件突发性检测的基础上,引入关键词特征,动态调整各个时间窗口的候选关键词,将不同事件与不同的关键词特征绑定,避免事件之间及噪音带来的干扰,实现对隐式事件突发性的准确识别.相关实验表明,本文提出的算法可有效改善现有社交网络中事件突发性检测任务的效果.


2018, 44(4): 743-750.
doi: 10.16383/j.aas.2017.c160128
cstr: 32138.14.j.aas.2017.c160128
摘要:
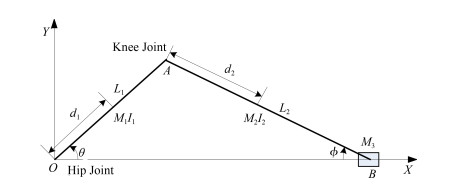
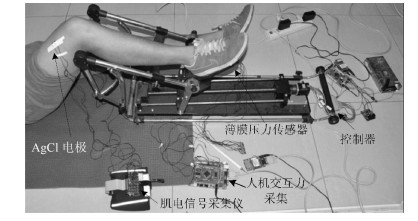
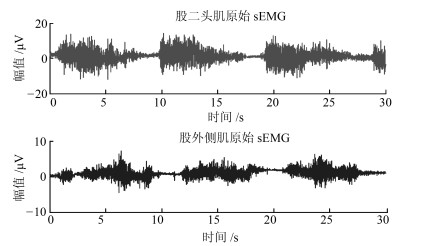
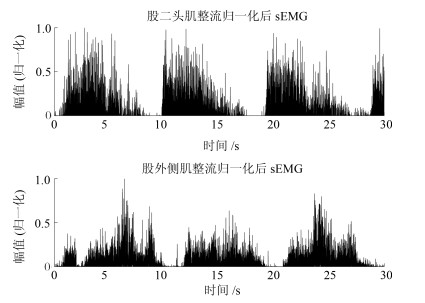
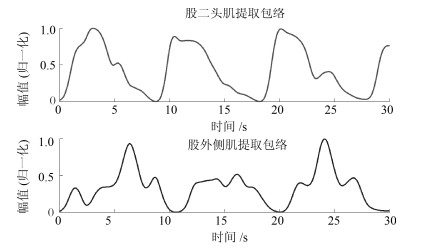
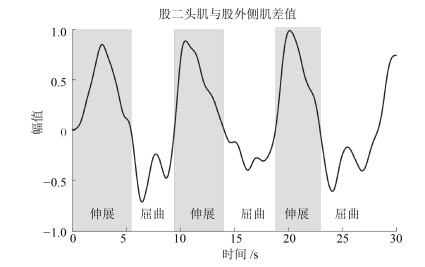
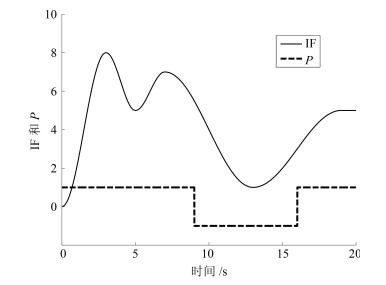
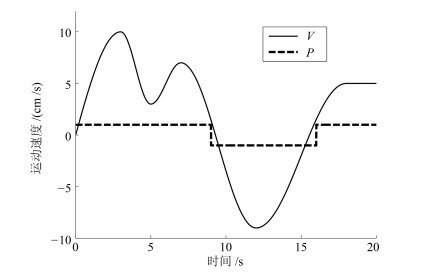
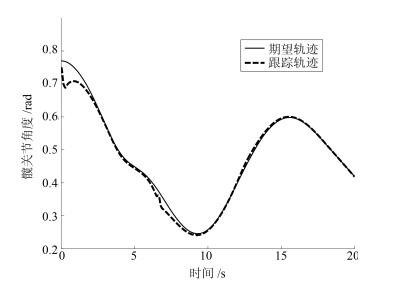
针对康复机器人运动过程中的人机交互性问题,提出一种下肢康复机器人自适应人机交互控制策略.提取伸屈运动中下肢表面肌电信号(Surface electromyography,sEMG)和足底压力特征,分别用于表征下肢运动意图和人机交互力(Interaction force,IF)信息,建立基于sEMG-IF的人机交互信息融合模型,实现下肢康复机器人运动轨迹的在线规划;考虑主动康复运动过程中的人机交互作用,建立具有时变动态特性的人机系统动力学模型,设计间接模糊自适应控制器对期望轨迹进行跟踪控制,实现下肢康复机器人自适应人机交互控制.通过对5名被试者进行下肢康复机器人运动控制实验研究,验证所提方法的可行性和有效性.
针对康复机器人运动过程中的人机交互性问题,提出一种下肢康复机器人自适应人机交互控制策略.提取伸屈运动中下肢表面肌电信号(Surface electromyography,sEMG)和足底压力特征,分别用于表征下肢运动意图和人机交互力(Interaction force,IF)信息,建立基于sEMG-IF的人机交互信息融合模型,实现下肢康复机器人运动轨迹的在线规划;考虑主动康复运动过程中的人机交互作用,建立具有时变动态特性的人机系统动力学模型,设计间接模糊自适应控制器对期望轨迹进行跟踪控制,实现下肢康复机器人自适应人机交互控制.通过对5名被试者进行下肢康复机器人运动控制实验研究,验证所提方法的可行性和有效性.

2018, 44(4): 751-759.
doi: 10.16383/j.aas.2018.c170001
cstr: 32138.14.j.aas.2018.c170001
摘要:
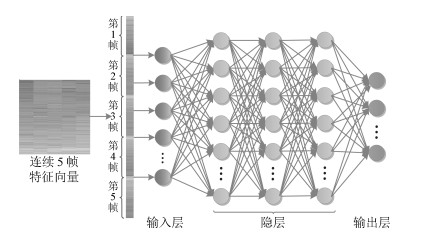
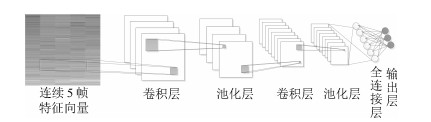
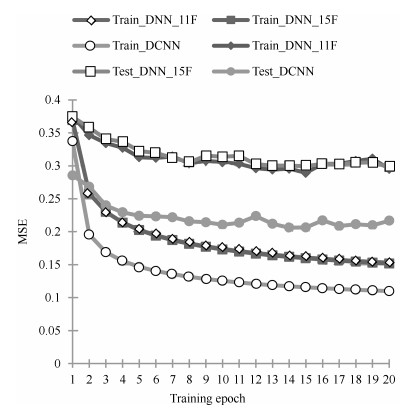
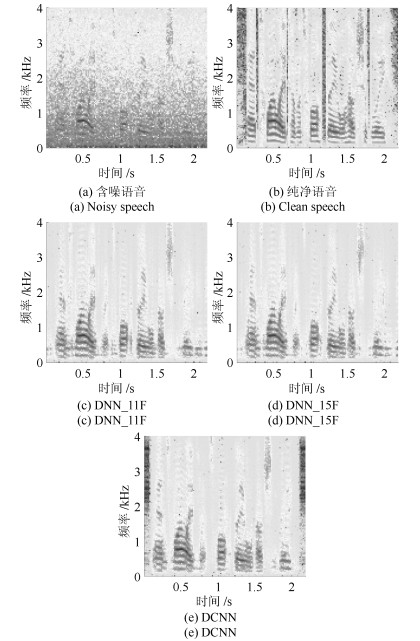
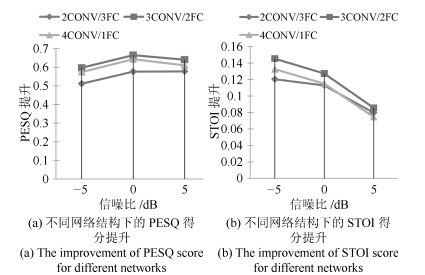
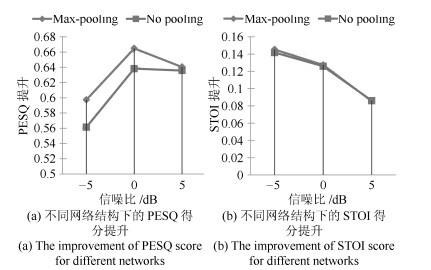
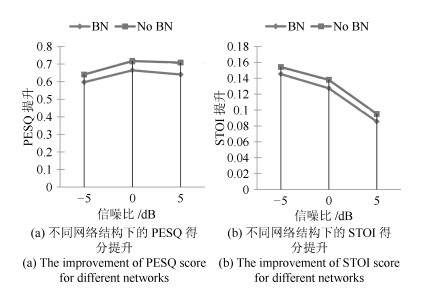
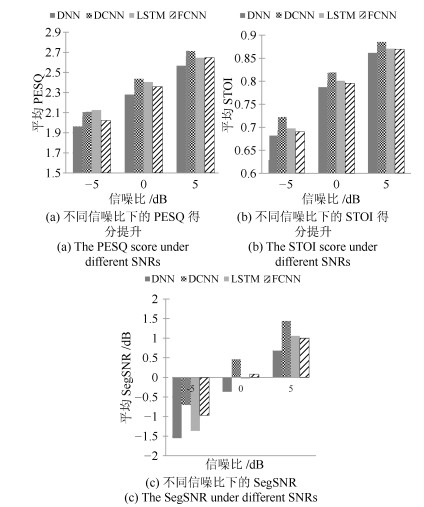
为了进一步提高基于深度学习的语音增强方法在未知噪声下的性能,本文从神经网络的结构出发展开研究.基于在时间与频率两个维度上,语音和噪声信号的局部特征都具有强相关性的特点,采用深度卷积神经网络(Deep convolutional neural network,DCNN)建模来表示含噪语音和纯净语音之间的复杂非线性关系.通过设计有效的训练特征和训练目标,并建立合理的网络结构,提出了基于深度卷积神经网络的语音增强方法.实验结果表明,在未知噪声条件下,本文方法相比基于深度神经网络(Deep neural network,DNN)的方法在语音质量和可懂度两种指标上都有明显提高.
为了进一步提高基于深度学习的语音增强方法在未知噪声下的性能,本文从神经网络的结构出发展开研究.基于在时间与频率两个维度上,语音和噪声信号的局部特征都具有强相关性的特点,采用深度卷积神经网络(Deep convolutional neural network,DCNN)建模来表示含噪语音和纯净语音之间的复杂非线性关系.通过设计有效的训练特征和训练目标,并建立合理的网络结构,提出了基于深度卷积神经网络的语音增强方法.实验结果表明,在未知噪声条件下,本文方法相比基于深度神经网络(Deep neural network,DNN)的方法在语音质量和可懂度两种指标上都有明显提高.



2018, 44(4): 760-768.
doi: 10.16383/j.aas.2017.c170056
cstr: 32138.14.j.aas.2017.c170056
摘要:
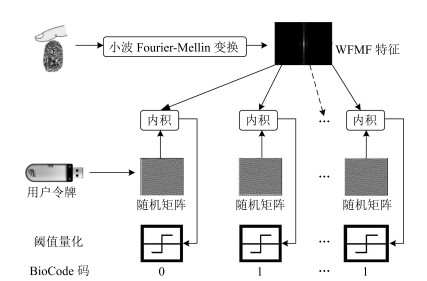
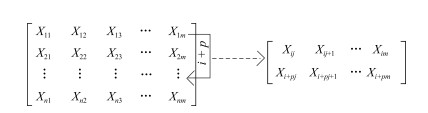
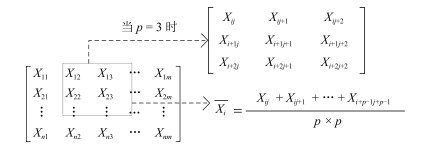
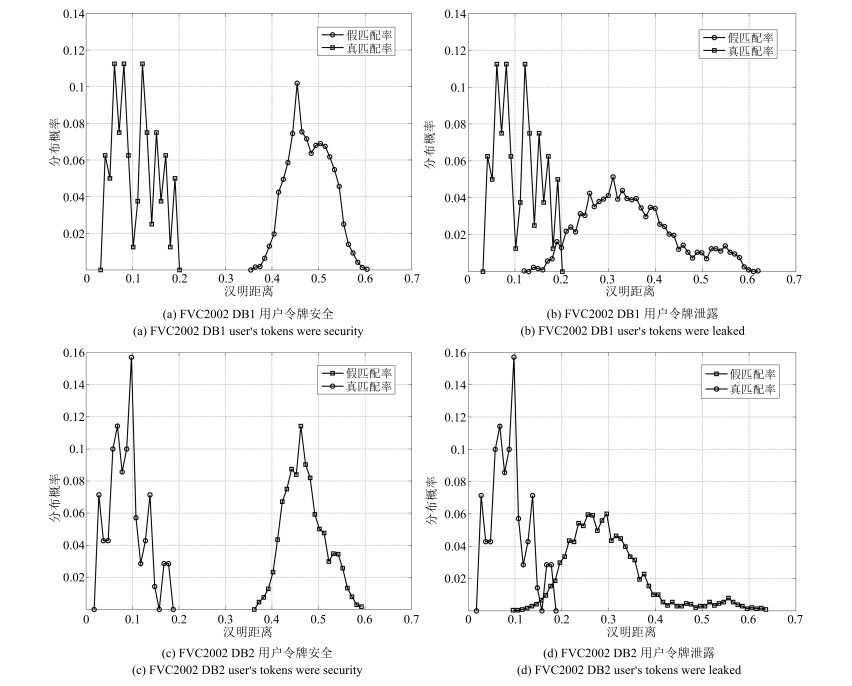
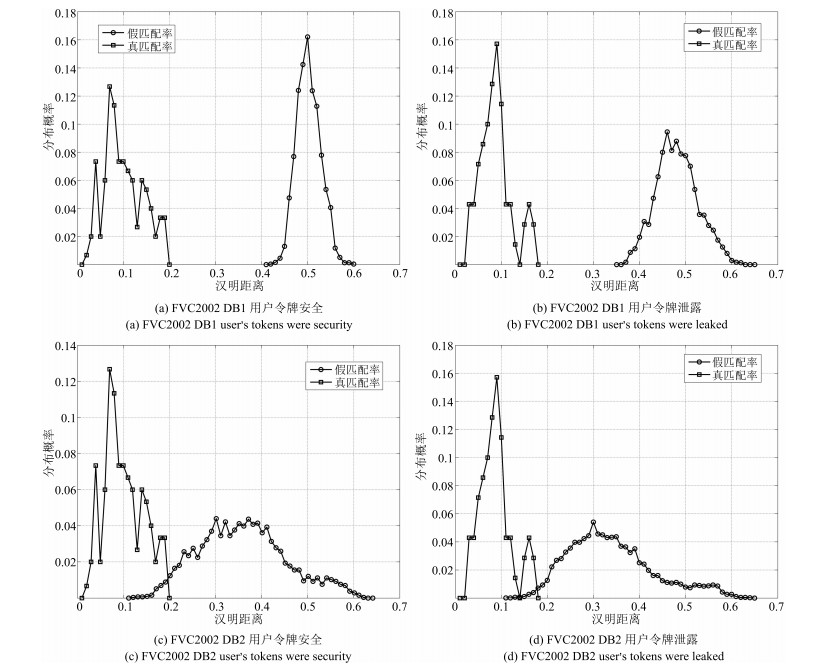
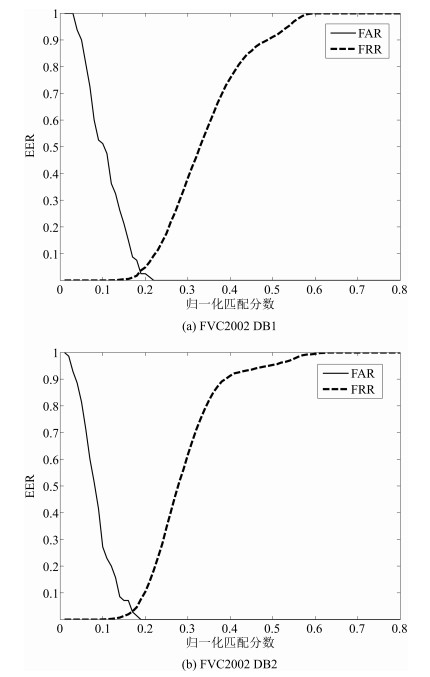
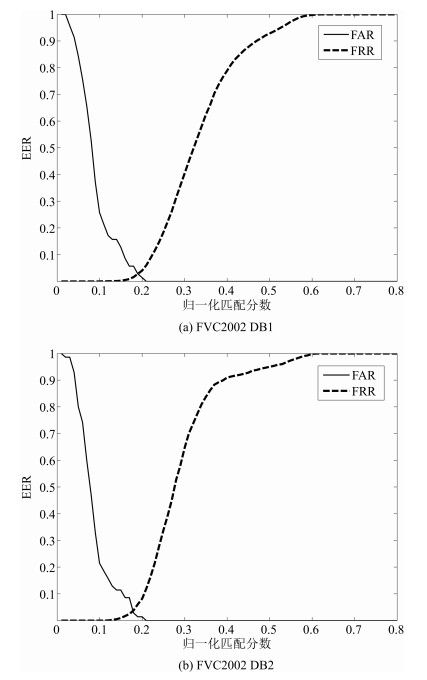
针对Biohashing指纹模板保护算法存在用户令牌泄露时识别性能严重退化的问题,提出了两种改进的Biohashing指纹模板保护算法.该算法在指纹数据预处理的基础上,采用可变的步长参数和滑动窗口产生固定大小的二值特征矩阵,减少了指纹数据特征值之间的关联性,离散化的非线性处理过程能够获得更大的密钥空间,有效提高了算法的安全性.理论分析和实验结果表明,改进算法具有更好的安全和识别性能.
针对Biohashing指纹模板保护算法存在用户令牌泄露时识别性能严重退化的问题,提出了两种改进的Biohashing指纹模板保护算法.该算法在指纹数据预处理的基础上,采用可变的步长参数和滑动窗口产生固定大小的二值特征矩阵,减少了指纹数据特征值之间的关联性,离散化的非线性处理过程能够获得更大的密钥空间,有效提高了算法的安全性.理论分析和实验结果表明,改进算法具有更好的安全和识别性能.