

Fuzzy Uncertainty Observer Based Adaptive Dynamic Surface Control for Trajectory Tracking of a Quadrotor
-
摘要: 针对具有未知外界扰动和系统不确定性的四旋翼飞行器,提出了一种基于模糊不确定观测器(Fuzzy uncertainty observer,FUO)的自适应动态面轨迹跟踪控制方法.通过将四旋翼飞行器系统分解为位置、姿态角和角速率三个动态子系统,使得各子系统虚拟控制器能够充分考虑欠驱动约束;采用一阶低通滤波器重构虚拟控制信号及其一阶导数,实现四旋翼跟踪控制设计的迭代解耦;设计了一种模糊不确定观测器,用以估计和补偿未知外界扰动与系统不确定性,从而确保闭环系统的稳定性和跟踪误差与其他系统信号的一致有界性.仿真研究验证了所提出的控制方法的有效性和优越性.Abstract: In this paper, a dynamic surface trajectory tracking control scheme using a fuzzy uncertainty observer (FUO) is proposed for a quadrotor with unknown external disturbances and system uncertainties. The quadrotor system is divided into three subsystems, i.e., dynamics of positions, attitude angles, and angular velocities, and each subsystem has a virtual controller to tackle coresponding underactuated constraints. First-order filters are employed to reconstruct the designed virtual control signals together with their first derivatives required successively in the dynamic surface control, and thereby decoupling the iterative design of the quadrotor tracking control. Fuzzy uncertainty observers are designed to estimate and compensate the unknown nonlinearities including unknown external disturbances and uncertainties so as to contribute to the closed-loop system stability, uniformly ultimately bounded tracking errors and bounded states. Simulation studies demonstrate the effectiveness and superiority of the proposed trajectory tracking control scheme.1) 本文责任编委 孙富春
-
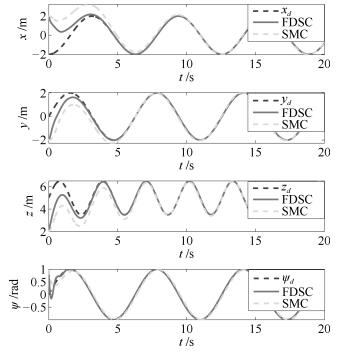
图 3 $x$, $y$, $z$和$\psi$给定和实际状态
Fig. 3 Desired and actual states $x$, $y$, $z$ and $\psi$
表 1 四旋翼飞行器主要参数
Table 1 The main parameters of the quadrotor
m 1.2 kg Jx 0.015 kg·m2 Jy 0.015 kg·m2 Jz 0.026 kg·m2 Dx 10-6 N(m/s)-2 Dy 10-6 N(m/s)-2 Dz 10-4 N(m/s)-2 g 9.81 m/s2  下载: 导出CSV
下载: 导出CSV
-
[1] Driessens S, Pounds P. The triangular quadrotor:a more efficient quadrotor configuration. IEEE Transactions on Robotics, 2015, 31(6):1517-1526 doi: 10.1109/TRO.2015.2479877 [2] 王飞, 崔金强, 陈本美, 李崇兴.一套完整的基于视觉光流和激光扫描测距的室内无人机导航系统.自动化学报, 2013, 39(11):1889-1900 http://www.aas.net.cn/CN/abstract/abstract18228.shtmlWang Fei, Cui Jin-Qiang, Chen Ben-Mei, Lee T H. A comprehensive UAV indoor navigation system based on vision optical flow and laser FastSLAM. Acta Automatica Sinica, 2013, 39(11):1889-1900 http://www.aas.net.cn/CN/abstract/abstract18228.shtml [3] Elfeky M, Elshafei M, Saif A W A, Al-Malki M F. Quadrotor with tiltable rotors for manned applications. In: Proceedings of the 11th International Multi-Conference on Systems, Signals & Devices. Barcelona, Spain: IEEE, 2014. 1-5 [4] Alexis K, Nikolakopoulos G, Tzes A. Model predictive quadrotor control:attitude, altitude and position experimental studies. IET Control Theory & Applications, 2012, 6(12):1812-1827 http://ltu.diva-portal.org/smash/record.jsf?pid=diva2%3A980101&dswid=-736 [5] Li H Y, Wang J H, Shi P. Output-feedback based sliding mode control for fuzzy systems with actuator saturation. IEEE Transactions on Fuzzy Systems, 2016, 24(6):1282-1293 doi: 10.1109/TFUZZ.2015.2513085 [6] Cabecinhas D, Naldi R, Silvestre C, Cunha R, Marconi L. Robust landing and sliding maneuver hybrid controller for a quadrotor vehicle. IEEE Transactions on Control Systems Technology, 2016, 24(2):400-412 doi: 10.1109/TCST.2015.2454445 [7] Zhu J C, Liu E D, Guo S, Xu C. A gradient optimization based PID tuning approach on quadrotor. In: Proceedings of the 27th Chinese Control and Decision Conference. Qingdao, China: IEEE, 2015. 1588-1593 [8] Yacef F, Bouhali O, Hamerlain M. Adaptive fuzzy backstepping control for trajectory tracking of unmanned aerial quadrotor. In: Proceedings of the 2014 International Conference on Unmanned Aircraft Systems. Orlando, FL, USA: IEEE, 2014. 920-927 [9] Basri M A M, Husain A R, Danapalasingam K A. Nonlinear control of an autonomous quadrotor unmanned aerial vehicle using backstepping controller optimized by particle swarm optimization. Journal of Engineering Science & Technology Review, 2015, 8(3):39-45 https://www.researchgate.net/publication/285220292_Nonlinear_Control_of_an_Autonomous_Quadrotor_Unmanned_Aerial_Vehicle_using_Backstepping_Controller_Optimized_by_Particle_Swarm_Optimization [10] Dolatabadi S H, Yazdanpanah M J. MIMO sliding mode and backstepping control for a quadrotor UAV. In: Proceedings of the 23rd Iranian Conference on Electrical Engineering. Tehran, Iran: IEEE, 2015. 994-999 [11] Runcharoon K, Srichatrapimuk V. Sliding mode control of quadrotor. In: Proceedings of the 2013 International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE). Konya, Turkey: IEEE, 2013. 552-557 [12] Li S, Li B K, Geng Q B. Adaptive sliding mode control for quadrotor helicopters. In: Proceedings of the 33rd Chinese Control Conference. Nanjing, China: IEEE, 2014. 71-76 [13] Chen F Y, Jiang R Q, Zhang K K, Jiang B, Tao G. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV. IEEE Transactions on Industrial Electronics, 2016, 63(8):5044-5056 https://ieeexplore.ieee.org/abstract/document/7448915/ [14] Gao H W, Liu C Y, Guo D L, Liu J G. Fuzzy adaptive PD control for quadrotor helicopter. In: Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER). Shenyang, China: IEEE, 2015. 281-286 [15] Mao X, Zhang H B, Han D F. T-S fuzzy control for a quad-rotor UAV. In: Proceedings of the 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015. 3617-3622 [16] Benavidez P, Lambert J, Jaimes A, Jamshidi M. Landing of an Ardrone 2. 0 quadcopter on a mobile base using fuzzy logic. In: Proceedings of the 2014 World Automation Congress (WAC). Waikoloa, HI, Qatar: IEEE, 2014. 803-812 [17] 王宁, 王永, 余明裕.四旋翼飞行器自适应动态面轨迹跟踪控制.控制与决策, 2017, 34(9):1185-1194 https://image.hanspub.org/xml/14697.xmlWang Ning, Wang Yong, Er Meng Joo, Adaptive dynamic surface trajectory tracking control of a quadrotor unmanned aerial vehicle.Control and Decision, 2017, 34(9):1185-1194 https://image.hanspub.org/xml/14697.xml [18] Zhou W D, Zhu P X, Wang C L, Chu M. Position and attitude tracking control for a quadrotor UAV based on terminal sliding mode control. In: Proceedings of the 34th Chinese Control Conference. Hangzhou, China: IEEE, 2015. 3398-3404 [19] Modirrousta A, Khodabandeh M. Adaptive robust sliding mode controller design for full control of quadrotor with external disturbances. In: Proceedings of the 2nd RSI/ISM International Conference on Robotics and Mechatronics (ICRoM). Tehran, Iran: IEEE, 2014. 870-877 [20] Zhang X, Xian B, Zhao B, Zhang Y. Autonomous flight control of a nano quadrotor helicopter in a GPS-denied environment using on-board vision. IEEE Transactions on Industrial Electronics, 2015, 62(10):6392-6403 doi: 10.1109/TIE.2015.2420036 [21] Besnard L, Shtessel Y B, Landrum B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer. Journal of the Franklin Institute, 2011, 349(2):658-684 https://www.sciencedirect.com/science/article/pii/S0016003211001839 [22] Rashad R, Aboudonia A, El-Badawy A. Backstepping trajectory tracking control of a quadrotor with disturbance rejection. In: Proceedings of the 25th International Conference on Information, Communication and Automation Technologies (ICAT). Sarajevo, Yugoslavia: IEEE, 2015. 1-7 [23] Yang Y, Wu Q X, Chen M. Robust trajectory tracking control for a quadrotor unmanned aerial vehicle using disturbance observer. In: Proceedings of the 12th World Congress on Intelligent Control and Automation (WCICA). Guilin, China: IEEE, 2016. 697-702 [24] Wang J, Du J K, Chen F Y, Jiang B, Tao G. Direct adaptive control scheme for a quadrotor helicopter with actuator failures via quantum logic. Journal of Aerospace Engineering, 2016, 29(5):Article No.04016026 https://trid.trb.org/view.aspx?id=1401461 [25] Gharib M R, Moavenian M. Full dynamics and control of a quadrotor using quantitative feedback theory. International Journal of Numerical Modelling-Electronic Networks, Devices and Fields, 2016, 29(3):501-519 doi: 10.1002/jnm.v29.3 [26] Sun H B, Hou L L, Li Y K. Disturbance observer based dynamic surface tracking control for a class of uncertain nonlinear systems with mismatched disturbances. In: Proceedings of the 12th World Congress on Intelligent Control and Automation (WCICA). Guilin, China: IEEE, 2016. 605-610 -

 下载:
下载:



图(8) / 表(1)
计量
- 文章访问数: 2901
- HTML全文浏览量: 453
- PDF下载量: 1220
- 被引次数: 0
