

-
摘要: 从路权这个新的角度回顾了过去100年地面交通控制发展的几个关键转变点,并结合目前新兴的网联车和无人车技术,分析了今后50年地面交通控制的发展方向.Abstract: In this paper, we first review the past 100-year development of ground traffic control from the viewpoint of right of way. Then, based on the development of the recent connected and automated vehicle (CAV) technologies, we provide a perspective of its next 50-year development.1) 本文责任编委 魏庆来
-

图 1 1924年德国柏林坡茨坦广场的五边交通灯塔
Fig. 1 The famous five-sided traffic light tower installed at Berlin's Potsdamer Platz in 1924
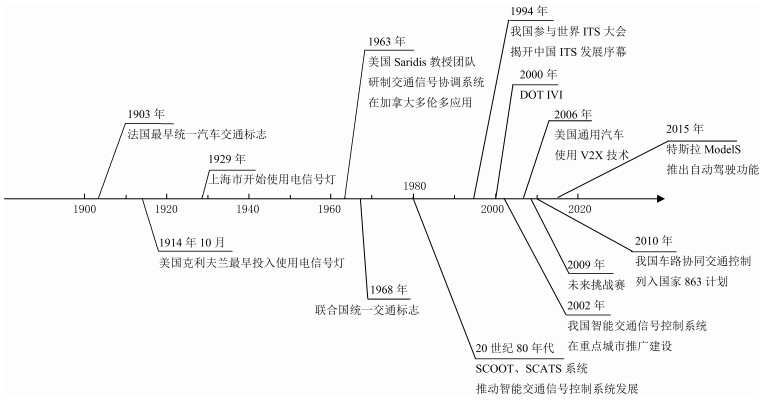
图 2 地面交通控制百年发展时间轴图
Fig. 2 Timeline for the past 100-year development of ground traffic control
-
[1] Lay M G. Ways of the World:A History of the World's Roads and the Vehicles that Used Them. New Brunswick:Rutgers University Press, 1992. [2] Weingroff R F. On the right side of the road[Online], available: https://www.fhwa.dot.gov/infrastructure/right.cfm, July 6, 2017. [3] Yin J T, Tang T, Yang L X, Xun J, Huang Y R, Gao Z Y. Research and development of automatic train operation for railway transportation systems:a survey. Transportation Research Part C:Emerging Technologies, 2017, 85:548-572 doi: 10.1016/j.trc.2017.09.009 [4] 李力, 王飞跃, 郑南宁, 张毅.驾驶行为智能分析的研究与发展.自动化学报, 2007, 33(10):1014-1022 http://www.aas.net.cn/CN/abstract/abstract17279.shtmlLi Li, Wang Fei-Yue, Zheng Nan-Ning, Zhang Yi. Research and developments of intelligent driving behavior analysis. Acta Automatica Sinica, 2007, 33(10):1014-1022 http://www.aas.net.cn/CN/abstract/abstract17279.shtml [5] Christopher P U, Ian J M, Dmitri A D, Zhu J J. Pedestrian Notifications, US Patent, US009196164B1, November 2015 [6] 100 years of Traffic Light[Online], available: https://www.siemens.com/press/en/feature/2014/infrastructure-cities/2014-08-trafficlights100.php, October 19, 2017. [7] Gazis D C. Optimum control of a system of oversaturated intersections. Operations Research, 1964, 12(6):815-831 doi: 10.1287/opre.12.6.815 [8] Green D H. Control of oversaturated intersections. Operations Research, 1967, 18(2):161-173 doi: 10.1057/jors.1967.27 [9] 李力, 姜锐, 贾斌, 赵晓梅.现代交通流理论与应用, 卷Ⅰ, 高速公路交通流.北京:清华大学出版社, 2010.Li Li, Jiang Rui, Jia Bin, Zhao Xiao-Mei. Modern Traffic Flow Theory and Applications, Vol. Ⅰ, Highway Traffic, Tsinghua University Press, Beijing, China, 2010, ISBN 978-7-302-23807-2. [10] Zhao L, Peng X S, Li L, Li Z J. A fast signal timing algorithm for individual oversaturated intersections. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1):280-283 doi: 10.1109/TITS.2010.2076808 [11] Li L, Yang K D, Li Z H, Zhang Z. The optimality condition of the multiple-cycle smoothed curve signal timing model.Transportation Research Part C:Emerging Technologies, 2013, 27:46-57 doi: 10.1016/j.trc.2012.12.004 [12] Yin Y F. Robust optimal traffic signal timing. Transportation Research Part B:Methodological, 2008, 42(10):911-924 doi: 10.1016/j.trb.2008.03.005 [13] Lee C S G, Saridis G N. Hierarchically intelligent control and management of traffic systems. IFAC Proceedings Volumes, 1981, 14(2):2395-2400 doi: 10.1016/S1474-6670(17)63826-6 [14] Hunt P B, Robertson D I, Bretherton R D, Winton R I. SCOOT——A Traffic Responsive Method of Coordinating Signals. Technical Report TRRL-LR-1014, Transport and Road Research Laboratory, Wokingham, Berkshire, UK, 1981. [15] Robertson D I, Bretherton R D. Optimizing networks of traffic signals in real time-the SCOOT method. IEEE Transactions on Vehicular Technology, 1991, 40(1):11-15 doi: 10.1109/25.69966 [16] Lowrie P R. The Sydney coordinated adaptive traffic system-principles, methodology, algorithms. In: Proceedings of 1982 International Conference on Road Traffic Signalling. London, UK: Institution of Electrical Engineers, 1982. 67-70 [17] Lowrie P R. SCATS——A Traffic Responsive Method of Controlling Urban Traffic, Roads and Traffic Authority. Sydney, New South Wales: Roads and Traffic Authority, 1990. [18] Wang F Y. ITS with complete traffic control. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2):457-462 doi: 10.1109/TITS.2014.2311334 [19] Wang F Y. The T-ITS awards and future transportation. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(6):2353-2359 doi: 10.1109/TITS.2014.2368381 [20] Mirchandani P, Wang F Y. RHODES to intelligent transportation systems. IEEE Intelligent Systems, 2005, 20(1):10-15 doi: 10.1109/MIS.2005.15 [21] Wang F Y. Parallel control and management for intelligent transportation systems:concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3):630-638 doi: 10.1109/TITS.2010.2060218 [22] Guo W, Zhang Y, Li L. The integration of CPS, CPSS, and ITS:a focus on data. Tsinghua Science and Technology, 2015, 20(4):327-335 doi: 10.1109/TST.2015.7173449 [23] Liu C, Herman R, Gazis D C. A review of the yellow interval dilemma. Transportation Research Part A:Policy and Practice, 1996, 30(5):333-348 doi: 10.1016/0965-8564(96)00001-8 [24] Li L, Wen D, Zheng N N, Shen L C. Cognitive cars:a new frontier for ADAS research. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1):395-407 doi: 10.1109/TITS.2011.2159493 [25] 赵冬斌, 刘德荣, 易建强.基于自适应动态规划的城市交通信号优化控制方法综述.自动化学报, 2009, 35(6):676-681 http://www.aas.net.cn/CN/abstract/abstract13331.shtmlZhao Dong-Bin, Liu De-Rong, Yi Jian-Qiang. An overview on the adaptive dynamic programming based urban city traffic signal optimal control. Acta Automatica Sinica, 2009, 35(6):676-681 http://www.aas.net.cn/CN/abstract/abstract13331.shtml [26] Chi R H, Hou Z S. A model-free periodic adaptive control for freeway traffic density via ramp metering. Acta Automatica Sinica, 2010, 36(7):1029-1033 https://www.sciencedirect.com/science/article/pii/S187410290960046X [27] 刘小明, 唐少虎, 朱凤华, 陈兆盟.基于MFD的城市区域过饱和交通信号优化控制.自动化学报, 2017, 43(7):1220-1233 http://www.aas.net.cn/CN/abstract/abstract19095.shtmlLiu Xiao-Ming, Tang Shao-Hu, Zhu Feng-Hua, Chen Zhao-Meng. Urban area oversaturated traffic signal optimization control based on MFD. Acta Automatica Sinica, 2017, 43(7):1220-1233 http://www.aas.net.cn/CN/abstract/abstract19095.shtml [28] Li L, Song J Y, Wang F Y, Niehsen W, Zheng N N. IVS 05:new developments and research trends for intelligent vehicles. IEEE Intelligent Systems, 2005, 20(4):10-14 doi: 10.1109/MIS.2005.73 [29] Florin R, Olariu S. A survey of vehicular communications for traffic signal optimization. Vehicular Communications, 2015, 2(2):70-79 doi: 10.1016/j.vehcom.2015.03.002 [30] Younes M B, Boukerche A. Intelligent traffic light controlling algorithms using vehicular networks. IEEE Transactions on Vehicular Technology, 2016, 65(8):5887-5899 doi: 10.1109/TVT.2015.2472367 [31] Xu B, Ban X J, Bian Y G, Wang J Q, Li K Q. V2I based cooperation between traffic signal and approaching automated vehicles. In: Proceedings of 2017 IEEE Intelligent Vehicles Symposium (Ⅳ). Los Angeles, CA, USA: IEEE, 2017. 1658-1664 [32] Martinez F J, Toh C K, Cano J C, Calafate C T, Manzoni P. Emergency services in future intelligent transportation systems based on vehicular communication networks. IEEE Intelligent Transportation Systems Magazine, 2010, 2(2):6-20 doi: 10.1109/MITS.2010.938166 [33] Pau G. Quickly home please:how connected vehicles are revolutionizing road transportation. IEEE Internet Computing, 2013, 17(1):80-83 doi: 10.1109/MIC.2013.13 [34] Shladover S E. Connected and automated vehicle systems: introduction and overview. Journal of Intelligent Transportation Systems, to be published [35] Nobe S A, Wang F Y. An overview of recent developments in automated lateral and longitudinal vehicle controls. In: Proceedings of the 2001 IEEE International Conference on Systems, Man, and Cybernetics. Tucson, AZ, USA, USA: IEEE, 2001. 3447-3452 [36] Zheng N N, Tang S M, Cheng H, Li Q, Lai G, Wang F W. Toward intelligent driver-assistance and safety warning system. IEEE Intelligent Systems, 2004, 19(2):8-11 doi: 10.1109/MIS.2004.1274904 [37] Li L, Wang F Y. Cooperative driving at blind crossings using intervehicle communication. IEEE Transactions on Vehicular Technology, 2006, 55(6):1712-1724 doi: 10.1109/TVT.2006.878730 [38] Dresner K, Stone P. A multiagent approach to autonomous intersection management. Journal of Artificial Intelligence Research, 2008, 31(1):591-656 http://dl.acm.org/citation.cfm?id=1622672&CFID=235189900&CFTOKEN=98015116 [39] Li L, Wen D, Yao D Y. A survey of traffic control with vehicular communications. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1):425-432 doi: 10.1109/TITS.2013.2277737 [40] Chen L, Englund C. Cooperative intersection management:a survey. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2):570-586 doi: 10.1109/TITS.2015.2471812 [41] Meng Y, Li L, Wang F Y, Li K Q, Li Z H. Analysis of cooperative driving strategies for non-signalized intersections. IEEE Transactions on Vehicular Technology, to be published [42] Li P F, Zhou X S. Recasting and optimizing intersection automation as a connected-and-automated-vehicle (CAV) scheduling problem:a sequential branch-and-bound search approach in phase-time-traffic hypernetwork. Transportation Research Part B:Methodological, 2017, 105:479-506 doi: 10.1016/j.trb.2017.09.020 [43] Cassandras C G. Automating mobility in smart cities. Annual Reviews in Control, 2017, 44:1-8 doi: 10.1016/j.arcontrol.2017.10.001 [44] Liu W, Li Z H, Li L, Wang F Y. Parking like a human:a direct trajectory planning solution. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(12):3388-3397 doi: 10.1109/TITS.2017.2687047 [45] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习——机器学习的一个新型理论框架.自动化学报, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtmlLi Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning——a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtml [46] Li L, Lin Y L, Zheng N N, Wang F Y. Parallel learning:a perspective and a framework. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3):389-395 doi: 10.1109/JAS.2017.7510493 [47] FAA. NextGen Implementation Plan. Federal Aviation Administration, Washington, DC, USA, 2016. [48] Yang H, Wang X L. Managing network mobility with tradable credits. Transportation Research Part B:Methodological, 2011, 45(3):580-594 doi: 10.1016/j.trb.2010.10.002 [49] Lin W H, Lo H K. Highway voting system:embracing a possible paradigm shift in traffic data acquisition. Transportation Research Part C:Emerging Technologies, 2015, 56:149-160 doi: 10.1016/j.trc.2015.03.025 [50] Nie Y. Why is license plate rationing not a good transport policy? Transportmetrica A:Transport Science, 2017, 13(1):1-23 doi: 10.1080/23249935.2016.1202354 [51] Daganzo C F, Cassidy M J. Effects of high occupancy vehicle lanes on freeway congestion. Transportation Research Part B:Methodological, 2008, 42(10):861-872 doi: 10.1016/j.trb.2008.03.002 [52] Li L, Huang W L, Liu Y H, Zheng N N, Wang F Y. Intelligence testing for autonomous vehicles:a new approach. IEEE Transactions on Intelligent Vehicles, 2016, 1(2):158-166 doi: 10.1109/TIV.2016.2608003 [53] Helbing D. Globally networked risks and how to respond. Nature, 2013, 497(7447):51-59 doi: 10.1038/nature12047 [54] Wang F Y. Toward a revolution in transportation operations:AI for complex systems. IEEE Intelligent Systems, 2008, 23(6):8-13 doi: 10.1109/MIS.2008.112 [55] 王飞跃. 智能车如何上路? CSIS/CAST报告, 北京, 2007. [56] Ran B, Jin P J, Boyce D, Qiu T Z, Cheng Y. Perspectives on future transportation research:impact of intelligent transportation system technologies on next-generation transportation modeling. Journal of Intelligent Transportation Systems, 2012, 16(4):226-242 doi: 10.1080/15472450.2012.710158 -

 下载:
下载:


图(3)
计量
- 文章访问数: 2408
- HTML全文浏览量: 591
- PDF下载量: 1628
- 被引次数: 0
