

-
摘要: 针对残臂较短或残臂上肌电信号测量点较少的残疾人使用多自由度假手的需求,提出一种基于脑电信号(Electroencephalogram,EEG)和表面肌电信号(Surface electromyogram signal,sEMG)协同处理的假手控制策略.该方法仅用1个肌电传感器和1个脑电传感器实现多自由度假手的控制.采用1个脑电传感器测量人体前额部位的EEG,从测量得到的EEG中提取出眨眼动作信息并将其用于假手动作的编码;采用1个肌电传感器测量手臂上的sEMG,并针对肌电信号存在个体差异和位置差异的问题,采用自适应方法实现手部动作强度的估计;采用振动触觉技术设计触觉编码用于将当前假手的控制指令反馈给佩戴者,从而实现EEG和sEMG对多自由度假手的协同控制.为验证该控制策略的有效性进行了实验研究,结果表明,提出的假手控制策略是有效的.Abstract: A control strategy based on electroencephalogram (EEG) and surface electromyogram signal (sEMG) is proposed to meet the demand of using multiple degrees of freedom (DOF) prosthetic hand for the upper limb amputee whose remnant arm is too short to place enough sEMG sensors. In this paper, one EEG sensor and one sEMG sensor are adopted to realize the control of the multiple DOF prosthetic hand. A portable EEG measurement instrument, MindWave, is employed to capture the EEG of the user's forehead. The blink information extracted from the EEG is used to code the actions of the prosthetic hand. An sEMG sensor is employed to capture the sEMG on the user's surface skin. The captured sEMG is used to estimate the severity of the action including grasp force, opening and closing speeds, rotational speed of the wrist. An adaptive method is also proposed to reduce the influence on the sEMG caused by the individual differences. A tactile feedback device is designed to realize the EEG and sEMG coordinating control of the prosthetic hand. Experiments are implemented to verify the validity of the proposed control strategy and the results show that the proposed control strategy is effective.
-
Key words:
- Prosthetic hand /
- motion coding /
- coordinated control /
- tactile feedback
1) 本文责任编委 程龙 -
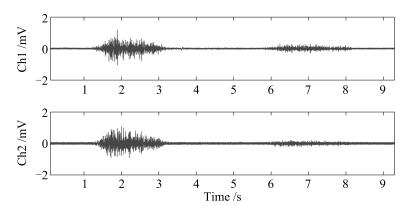
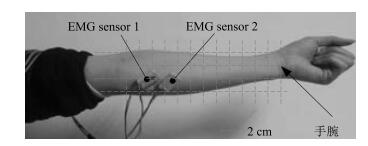
图 5 同一块肌肉不同位置测量得到的两路肌电信号
Fig. 5 Two channels of sEMG captured from different locations of the same muscle
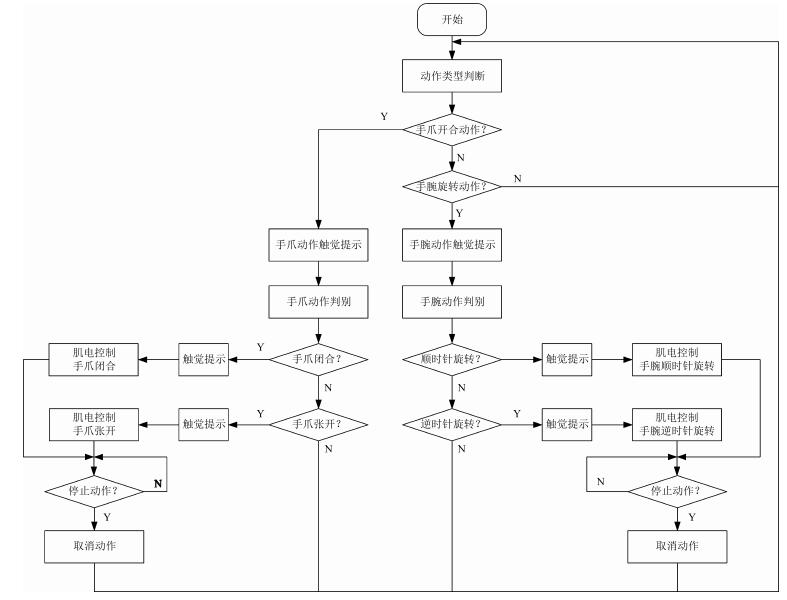
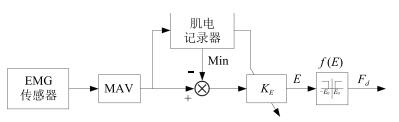
图 10 EEG和sEMG协同控制流程图
Fig. 10 Flow chart of the coordinated control based on EEG and sEMG
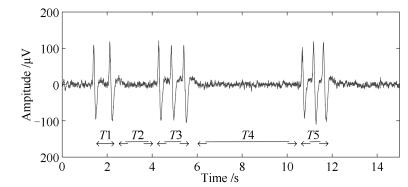
图 15 对手爪闭合动作进行眨眼编码时测量得到的EEG
Fig. 15 EEG captured in the process of blink coding of the hand closing
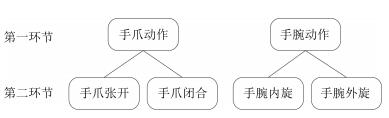
表 1 单位时间内眨眼次数与假手动作类型的关系
Table 1 The relationship between the blink times and the motion type of the prosthetic hand
第一环节眨眼次数 第二环节眨眼次数 动作类型 2 2 手爪张开 3 手爪闭合 3 2 手腕顺时针转动 3 手腕逆时针转动  下载: 导出CSV
下载: 导出CSV
表 2 手部动作识别结果
Table 2 Results of the hand motion recognition experiments
受试者编号 性别 动作编码正确率(%) 手爪张开 手爪闭合 顺时针旋转 逆时针旋转 平均正确率 1 女 96 100 100 96 98 2 女 96 92 96 92 94 3 女 92 96 96 96 95 4 女 96 92 92 96 94 5 女 92 100 96 100 97 6 男 96 96 92 100 96 7 男 92 96 96 96 95 8 男 92 92 96 96 94 9 男 96 100 92 92 95 10 男 92 88 92 96 92
下载: 导出CSV
表 3 触觉感知实验结果
Table 3 Results of the tactile perception experiments
受试者编号 性别 动作编码正确率(%) 手爪动作 手腕动作 手爪张开 手爪闭合 顺时针旋转 逆时针旋转 平均正确率 1 女 100 100 100 100 100 100 100 2 女 100 100 100 100 100 100 100 3 女 100 100 100 100 95 95 98.33 4 女 100 100 100 100 100 100 100 5 女 100 100 100 100 95 100 99.17 6 男 100 100 100 100 100 95 99.17 7 男 100 100 100 100 100 95 99.17 8 男 100 100 100 100 100 100 100 9 男 100 100 100 95 95 100 98.33 10 男 100 100 95 100 95 95 97.5
下载: 导出CSV
表 4 砝码抓取实验结果
Table 4 Results of the grasping weights
受试者编号 性别 成功率(%) 1 女 95 2 女 95 3 女 90 4 女 100 5 女 95 6 男 90 7 男 100 8 男 95 9 男 95 10 男 100
下载: 导出CSV
表 5 纸杯取实验结果
Table 5 Results of the grasping paper cups
受试者编号 性别 成功率(%) 1 女 95 2 女 95 3 女 90 4 女 100 5 女 95 6 男 90 7 男 100 8 男 95 9 男 95 10 男 100
下载: 导出CSV
-
[1] Maat B, Smit G, Plettenburg D, Breedveld P. Passive prosthetic hands and tools:a literature review. Prosthetics and Orthotics International, 2018, 42(1):66-74 doi: 10.1177/0309364617691622 [2] Clement R G E, Bugler K E, Oliver C W. Bionic prosthetic hands:a review of present technology and future aspirations. The Surgeon, 2011, 9(6):336-340 doi: 10.1016/j.surge.2011.06.001 [3] Brunelli D, Tadesse A M, Vodermayer B, Nowak M, Castellini C. Low-cost wearable multichannel surface EMG acquisition for prosthetic hand control. In: Proceedings of the 6th IEEE International Workshop on Advances in Sensors and Interfaces. Gallipoli, Turkey: IEEE, 2015. 94-99 [4] 佟丽娜, 侯增广, 彭亮, 王卫群, 陈翼雄, 谭民.基于多路sEMG时序分析的人体运动模式识别方法.自动化学报, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtmlTong Li-Na, Hou Zeng-Guang, Peng Liang, Wang Wei-Qun, Chen Yi-Xiong, Tan Min. Multi-channel sEMG time series analysis based human motion recognition method. Acta Automatica Sinica, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtml [5] Wu C, Song A, Ji P. A control strategy for prosthetic hand based on attention concentration and EMG. In: Proceedings of the 8th International Conference on Intelligent Robotics and Applications. Portsmouth, UK: Springer, 2015. 307-318 [6] Losier Y G. Shoulder Complex Motion Based Input Strategies for Prosthetic Limb Control[Ph. D. dissertation], University of New Brunswick, Canada, 2009. [7] Tamura H, Gotoh T, Okumura D, Tanaka H, Tanno K. A study on the S-EMG pattern recognition using neural network. International Journal of Innovative Computing, Information and Control, 2009, 5(12):4877-4884 https://ieeexplore.ieee.org/document/7440146/?reload=true&arnumber=7440146&filter%3DAND%28p_IS_Number%3A7440135%29 [8] Caesarendra W, Lekson S U, Mustaqim K A, Winoto A R, Widyotriatmo A. A classification method of hand EMG signals based on principal component analysis and artificial neural network. In: Proceedings of the 2016 International Conference on Instrumentation, Control, and Automation (ICA). Bandung, Indonesia: IEEE, 2016. 22-27 [9] Yang S X, Yang G Y. Emotion recognition of EMG based on improved L-M BP neural network and SVM. Journal of Software, 2011, 6(8):1529-1536 http://www.jsoftware.us/vol6/jsw0608-19.pdf [10] Elhariri E, El-Bendary N, Hassanien A E. A hybrid classification model for emg signals using grey wolf optimizer and SVMs. In: Proceedings of the 1st International Conference on Advanced Intelligent System and Informatics (AISI2015). Cham, Germany: Springer International Publishing, 2016. 297-307 [11] Alkan A, Günay M. Identification of EMG signals using discriminant analysis and SVM classifier. Expert Systems with Applications, 2012, 39(1):44-47 doi: 10.1016/j.eswa.2011.06.043 [12] Li N, Yang D P, Jiang L, Liu H, Cai H G. Combined use of FSR sensor array and SVM classifier for finger motion recognition based on pressure distribution map. Journal of Bionic Engineering, 2012, 9(1):39-47 doi: 10.1016/S1672-6529(11)60095-4 [13] Ziai A, Menon C. Comparison of regression models for estimation of isometric wrist joint torques using surface electromyography. Journal of Neuroengineering and Rehabilitation, 2011, 8:Article No.56 doi: 10.1186/1743-0003-8-56 [14] Nielsen J L G, Holmgaard S, Jiang N, Englehart K, Farina D, Parker P. Enhanced EMG signal processing for simultaneous and proportional myoelectric control. In: Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Minneapolis, MN, USA: IEEE, 2009. 4335-4338 [15] Nielsen J L G, Holmgaard S, Jiang N, Englehart K B, Farina D, Parker P A. Simultaneous and proportional force estimation for multifunction myoelectric prostheses using mirrored bilateral training. IEEE Transactions on Biomedical Engineering, 2011, 58(3):681-688 doi: 10.1109/TBME.2010.2068298 [16] Fougner A, Kyberd P J, Stavdahl Ø. EMG feature selection for simultaneous proportional control of multifunctional upper-limb prostheses. In: Proceedings of the 13th World Congress of the International Society for Prosthetics and Orthotics (ISPO). Leipzig, Germany: ISPO, 2010. [17] Pulliam C L, Lambrecht J M, Kirsch R F. Continuous and simultaneous EMG-based neural network control of transradial prostheses. In: Proceedings of the 2011 MEC'11 conference. Fredericton, Canada: University of New Brunswick, 2011. [18] Muceli S, Farina D. Simultaneous and proportional estimation of hand kinematics from EMG during mirrored movements at multiple degrees-of-freedom. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2012, 20(3):371-378 doi: 10.1109/TNSRE.2011.2178039 [19] Jiang N, Englehart K B, Parker P A. Extracting simultaneous and proportional neural control information for multiple-DOF prostheses from the surface electromyographic signal. IEEE Transactions on Biomedical Engineering, 2009, 56(4):1070-1080 doi: 10.1109/TBME.2008.2007967 [20] Fougner A L. Proportional Myoelectric Control of a Multifunction Upper-Limb Prosthesis[Master dissertation], Institutt for Teknisk Kybernetikk, Norway, 2007. [21] Kyranou I, Krasoulis A, Erden M S, Nazarpour K, Vijayakumar S. Real-time classification of multi-modal sensory data for prosthetic hand control. In: Proceedings of the 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob). Singapore, Singapore: IEEE, 2016. 536-541 [22] Geethanjali P. A mechatronics platform to study prosthetic hand control using EMG signals. Australasian Physical and Engineering Sciences in Medicine, 2016, 39(3):765-771 doi: 10.1007/s13246-016-0458-6 [23] Wu C C, Song A G, Ling Y, Wang N, Tian L. A control strategy with tactile perception feedback for emg prosthetic hand. Journal of Sensors, 2015, 2015:Article No.869175. https://www.hindawi.com/journals/js/2015/869175/ [24] 吴常铖, 宋爱国, 章华涛.一种肌电假手的自适应模糊控制方法.仪器仪表学报, 2013, 34(6):1339-1345 http://d.wanfangdata.com.cn/Periodical_yqyb201306020.aspxWu Chang-Cheng, Song Ai-Guo, Zhang Hua-Tao. Adaptive fuzzy control method for EMG prosthetic hand. Chinese Journal of Scientific Instrument, 2013, 34(6):1339-1345 http://d.wanfangdata.com.cn/Periodical_yqyb201306020.aspx [25] 吴常铖, 宋爱国, 章华涛, 冯超.基于刚度模糊观测的假手反演控制策略.机器人, 2013, 35(6):686-691 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_jqr201306007Wu Chang-Cheng, Song Ai-Guo, Zhang Hua-Tao, Feng Chao. A backstepping control strategy for prosthetic hand based on fuzzy observation of stiffness. Robot, 2013, 35(6):686-691 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_jqr201306007 [26] Sherrick C E. A scale for rate of tactual vibration. Journal of the Acoustical Society of America, 1985, 78:78-83 doi: 10.1121/1.392457 -

 下载:
下载:







计量
- 文章访问数: 2450
- HTML全文浏览量: 536
- PDF下载量: 762
- 被引次数: 0
