

-
摘要: 肌电信号的采集易受到空气湿度和皮肤表面汗液等多种随机因素的干扰,使采集到的肌电信号极不稳定.为了应对此问题,市售的肌电假肢普遍采用基于开关量的控制方法,但是开关量对多自由度假肢的控制依赖于顺序动作切换,这使得假肢的实际使用过程比较繁琐.利用肢体运动学信息的假肢控制方法常见于下肢假肢,这是因为上肢的运动受抓取物体的形状和位置等因素变化,其肢体运动的规律性较差.本文提出一种利用上臂关节角度和肌电信号的控制方法,利用人体在抓握时肩关节的运动模式区分使用者对不同形状物体的抓握,并将此方法应用在二自由度假肢的控制中.通过与开关量控制的假肢在日常物品抓握实验中的对比,表明本文所提出方法在稳定性和使用效率方面都优于开关量控制的方式.Abstract: The EMG signal is affected by air humidity, sweat, and many other factors, therefore, it is not stable for long time usage. To cope with this shortage, EMG based prosthetic hands available in the market are usually controlled by the on/off strategy. However, this strategy is not sophisticated for controlling prosthetic hands with multi-DOFs. Kinematics information is frequently used in controlling lower limb prostheses instead of upper limb ones because of the object-oriented feature of the motion of the upper limb. In this paper, we propose a control strategy which identifies the fetching motion of the user from his/her shoulder joint. An experiment is conducted to show the stability and easy-use of the proposed strategy in comparison with the on/off strategy.
-
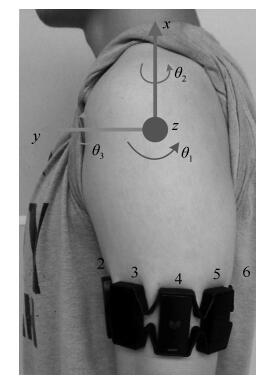
图 1 MYO的佩戴方式以及肩关节角度的定义
Fig. 1 Definition of shoulder joint angles and the position of MYO

图 5 6名被试者抓握动作在肩关节空间的分布
Fig. 5 Curves of the grasping of 6 subjects in the space of joint angles
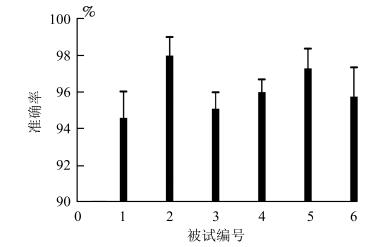
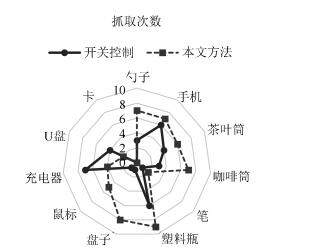
图 6 6名被试三类动作分类准确率和标准差
Fig. 6 Classification accuracy and standard deviation of the three movements for 6 subjects
-
[1] 侯增广, 赵新刚, 程龙, 王启宁, 王卫群.康复机器人与智能辅助系统的研究进展.自动化学报, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtmlHou Zeng-Guang, Zhao Xin-Gang, Cheng Long, Wang Qi-Ning, Wang Wei-Qun. Recent advances in rehabilitation robots and intelligent assistance systems. Acta Automatica Sinica, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtml [2] 张良清, 苏沂峰, 杨万章, 李光林.多功能上肢假肢的研究进展.国际生物医学工程杂志, 2013, 36(5):311-316 http://med.wanfangdata.com.cn/Paper/Detail/PeriodicalPaper_gwyx-swyxgc201305014Zhang Liang-Qing, Su Yi-Feng, Yang Wan-Zhang, Li Guang-Lin. Research progress of multifunctional upper-limb prosthesis systems. International Journal of Biomedical Engineering, 2013, 36(5):311-316 http://med.wanfangdata.com.cn/Paper/Detail/PeriodicalPaper_gwyx-swyxgc201305014 [3] 佟丽娜, 侯增广, 彭亮, 王卫群, 陈翼雄, 谭民.基于多路sEMG时序分析的人体运动模式识别方法.自动化学报, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtmlTong Li-Na, Hou Zeng-Guang, Peng Liang, Wang Wei-Qun, Chen Yi-Xiong, Tan Min. Multi-channel sEMG time series analysis based human motion recognition method. Acta Automatica Sinica, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtml [4] Kamavuako E N, Scheme E J, Englehart K B. Determination of optimum threshold values for EMG time domain features; a multi-dataset investigation. Journal of Neural Engineering, 2016, 13(4):Article No. 046011 https://www.researchgate.net/publication/303751573_Determination_of_optimum_threshold_values_for_EMG_time_domain_features_A_multi-dataset_investigation [5] Liu J. Feature dimensionality reduction for myoelectric pattern recognition:a comparison study of feature selection and feature projection methods. Medical Engineering and Physics, 2014, 36(12):1716-1720 doi: 10.1016/j.medengphy.2014.09.011 [6] Politti F, Casellato C, Kalytczak M M, Garcia M B S, Biasotto-Gonzalez D A. Characteristics of EMG frequency bands in temporomandibullar disorders patients. Journal of Electromyography and Kinesiology, 2016, 31:119-125 doi: 10.1016/j.jelekin.2016.10.006 [7] 李阳, 田彦涛, 陈万忠.基于FFT盲辨识的肌电信号建模及模式识别.自动化学报, 2012, 38(1):128-134 http://www.aas.net.cn/CN/abstract/abstract17663.shtmlLi Yang, Tian Yan-Tao, Chen Wan-Zhong. Modeling and classifying of sEMG based on FFT blind identification. Acta Automatica Sinica, 2012, 38(1):128-134 http://www.aas.net.cn/CN/abstract/abstract17663.shtml [8] Ortiz-Catalan M, Håkansson B, Brånemark R. Real-time and simultaneous control of artificial limbs based on pattern recognition algorithms. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(4):756-764 doi: 10.1109/TNSRE.2014.2305097 [9] Jiang N, Rehbaum H, Vujaklija I, Graimann B, Farina D. Intuitive, online, simultaneous, and proportional myoelectric control over two degrees-of-freedom in upper limb amputees. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(3):501-510 doi: 10.1109/TNSRE.2013.2278411 [10] Ciancio A L, Cordella F, Barone R, Romeo R A, Bellingegni A D, Sacchetti R, Davalli A, Di Pino G, Ranieri F, Di Lazzaro V, Guglielmelli E, Zollo L. Control of prosthetic hands via the peripheral nervous system. Frontiers in Neuroscience, 2016, 10:Article No. 116 [11] Li Q X, Chan P P K, Zhou D L, Fang Y F, Liu H H, Yeung D S. Improving robustness against electrode shift of sEMG based hand gesture recognition using online semi-supervised learning. In: Proceedings of the 2016 International Conference on Machine Learning and Cybernetics. Jeju, South Korea: IEEE, 2016. 344-349 [12] Cipriani C, Sassu R, Controzzi M, Carrozza M C. Influence of the weight actions of the hand prosthesis on the performance of pattern recognition based myoelectric control: preliminary study. In: Proceedings of the 2011 Annual International Conference on Engineering in Medicine and Biology Society. Boston, USA: IEEE, 2011. 1620-1623 [13] Staudenmann D, Roeleveld K, Stegeman D F, van Dieën J H. Methodological aspects of SEMG recordings for force estimation-a tutorial and review. Journal of Electromyography and Kinesiology, 2010, 20(3):375-387 doi: 10.1016/j.jelekin.2009.08.005 [14] Young A J, Smith L H, Rouse E J, Hargrove L J. A comparison of the real-time controllability of pattern recognition to conventional myoelectric control for discrete and simultaneous movements. Journal of Neuroengineering and Rehabilitation, 2014, 11:Article No. 5 doi: 10.1186/1743-0003-11-5 [15] Clement R G, Bugler K E, Oliver C W. Bionic prosthetic hands:a review of present technology and future aspirations. The Surgeon, 2011, 9(6):336-340 doi: 10.1016/j.surge.2011.06.001 [16] Tabandeh S, Melek W, Biglarbegian M, Won S H P, Clark C. A memetic algorithm approach for solving the task-based configuration optimization problem in serial modular and reconfigurable robots. Robotica, 2016, 34(9):1979-2008 doi: 10.1017/S0263574714002690 [17] Montagnani F, Controzzi M, Cipriani C. Exploiting arm posture synergies in activities of daily living to control the wrist rotation in upper limb prostheses: a feasibility study. In: Proceedings of the 37th Annual International Conference of Engineering and Medicine and Biology Society. Milan, Italy: IEEE, 2015. 2462-2465 [18] Vandenberghe A, Levin O, Schutter J D, Swinnen S, Jonkers I. Three-dimensional reaching tasks:effect of reaching height and width on upper limb kinematics and muscle activity. Gait and Posture, 2010, 32(4):500-507 doi: 10.1016/j.gaitpost.2010.07.009 [19] 丁其川, 熊安斌, 赵新刚, 韩建达.基于表面肌电的运动意图识别方法研究及应用综述.自动化学报, 2016, 42(1):13-25 http://www.aas.net.cn/CN/abstract/abstract18792.shtmlDing Qi-Chuan, Xiong An-Bin, Zhao Xin-Gang, Han Jian-Da. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 2016, 42(1):13-25 http://www.aas.net.cn/CN/abstract/abstract18792.shtml [20] Papaleo E, Zollo L, Garcia-Aracil N, Badesa F J, Morales R, Mazzoleni S, Sterzi S, Guglielmelli E. Upper-limb kinematic reconstruction during stroke robot-aided therapy. Medical and Biological Engineering and Computing, 2015, 53(9):815-828 doi: 10.1007/s11517-015-1276-9 -

 下载:
下载:






图(11)
计量
- 文章访问数: 2277
- HTML全文浏览量: 588
- PDF下载量: 772
- 被引次数: 0
