2016年 第42卷 第11期
2016, 42(11): 1605-1619.
doi: 10.16383/j.aas.2016.c160303
cstr: 32138.14.j.aas.2016.c160303
摘要:
频域方法是控制理论与工程领域的一种基本研究手段,许多控制问题都可归结为有限频域性能指标的分析与综合问题.广义Kalman-Yakubovich-Popov(KYP)引理建立了频域方法(传递函数)与时域方法(状态空间)之间的一座桥梁,成为近年来系统与控制理论领域的研究热点之一.本文首先从信号和系统两个角度阐明有限频域分析与设计的背景和意义,并依次讨论三种主要研究方法(经典控制理论方法、频率加权法和广义性能指标法)各自的优缺点.然后简单介绍广义KYP引理的主体内容,并详细总结当前基于广义KYP引理的有限频域分析与设计的主要方向及研究进展.最后给出在使用广义KYP引理时很重要但容易忽视的几点注记,同时指明该领域目前存在并值得未来进一步研究的关键问题.
频域方法是控制理论与工程领域的一种基本研究手段,许多控制问题都可归结为有限频域性能指标的分析与综合问题.广义Kalman-Yakubovich-Popov(KYP)引理建立了频域方法(传递函数)与时域方法(状态空间)之间的一座桥梁,成为近年来系统与控制理论领域的研究热点之一.本文首先从信号和系统两个角度阐明有限频域分析与设计的背景和意义,并依次讨论三种主要研究方法(经典控制理论方法、频率加权法和广义性能指标法)各自的优缺点.然后简单介绍广义KYP引理的主体内容,并详细总结当前基于广义KYP引理的有限频域分析与设计的主要方向及研究进展.最后给出在使用广义KYP引理时很重要但容易忽视的几点注记,同时指明该领域目前存在并值得未来进一步研究的关键问题.
2016, 42(11): 1620-1629.
doi: 10.16383/j.aas.2016.c160323
cstr: 32138.14.j.aas.2016.c160323
摘要:
制导炮弹是由常规火炮发射,在飞行过程中进行搜索、导引和控制,能够对目标实施精确点打击的制导武器.制导炮弹转速的精确测量是实现精确制导和控制的基础.对制导炮弹转速测量技术进行了综述,首先,论述了制导炮弹的发展现状,接着分析了制导炮弹转速测量的必要性,并且阐述了制导炮弹转速测量的特点;然后,对现有旋转弹转速测量的方法和手段加以总结,并指出了适用于制导炮弹的转速测量及信息处理方法,包括利用磁阻传感器和高动态振动陀螺测量制导炮弹转速的原理以及关键技术;最后,指出了制导炮弹转速测量技术今后的研究方向和研究重点.
制导炮弹是由常规火炮发射,在飞行过程中进行搜索、导引和控制,能够对目标实施精确点打击的制导武器.制导炮弹转速的精确测量是实现精确制导和控制的基础.对制导炮弹转速测量技术进行了综述,首先,论述了制导炮弹的发展现状,接着分析了制导炮弹转速测量的必要性,并且阐述了制导炮弹转速测量的特点;然后,对现有旋转弹转速测量的方法和手段加以总结,并指出了适用于制导炮弹的转速测量及信息处理方法,包括利用磁阻传感器和高动态振动陀螺测量制导炮弹转速的原理以及关键技术;最后,指出了制导炮弹转速测量技术今后的研究方向和研究重点.

2016, 42(11): 1630-1640.
doi: 10.16383/j.aas.2016.c150880
cstr: 32138.14.j.aas.2016.c150880
摘要:
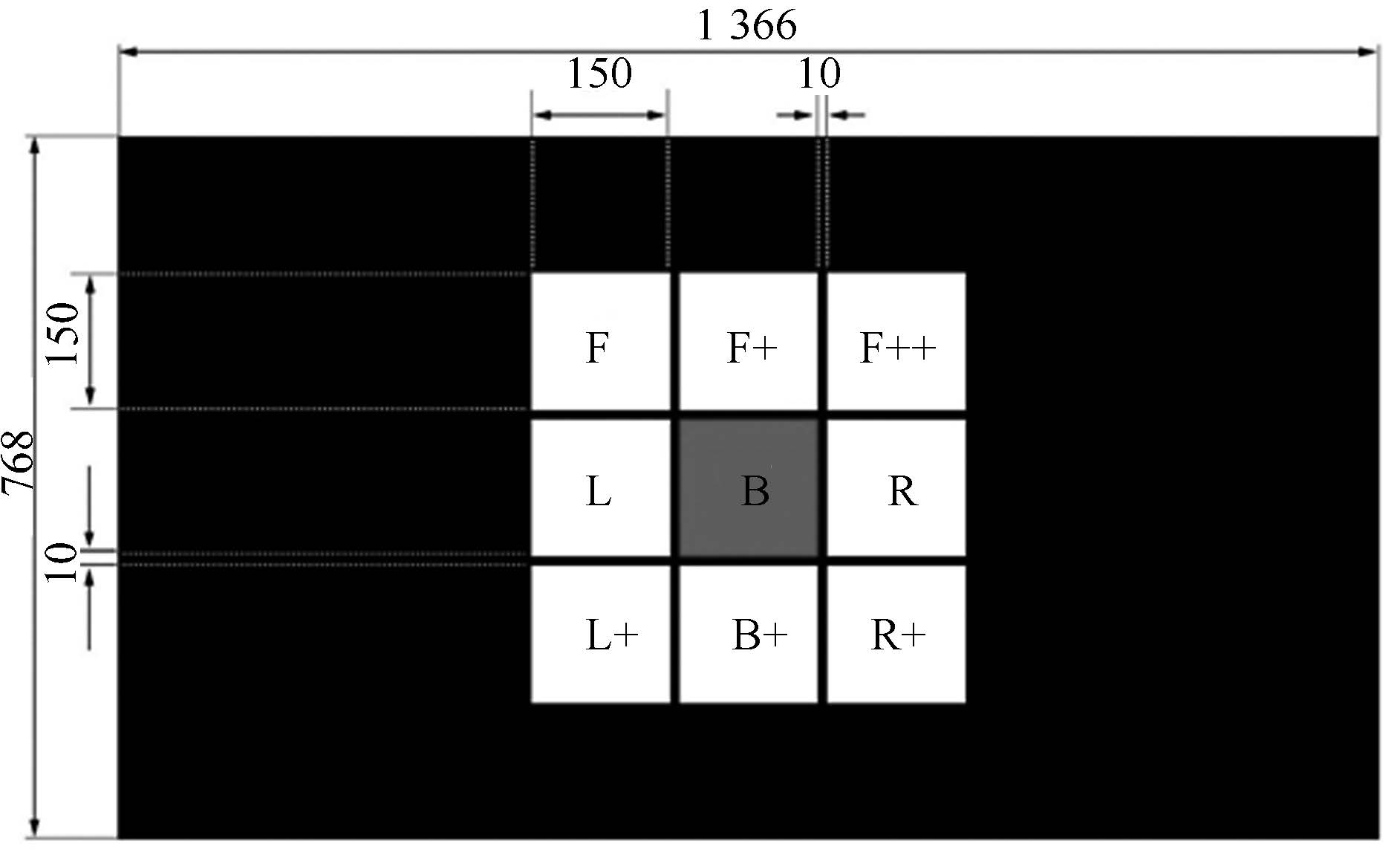
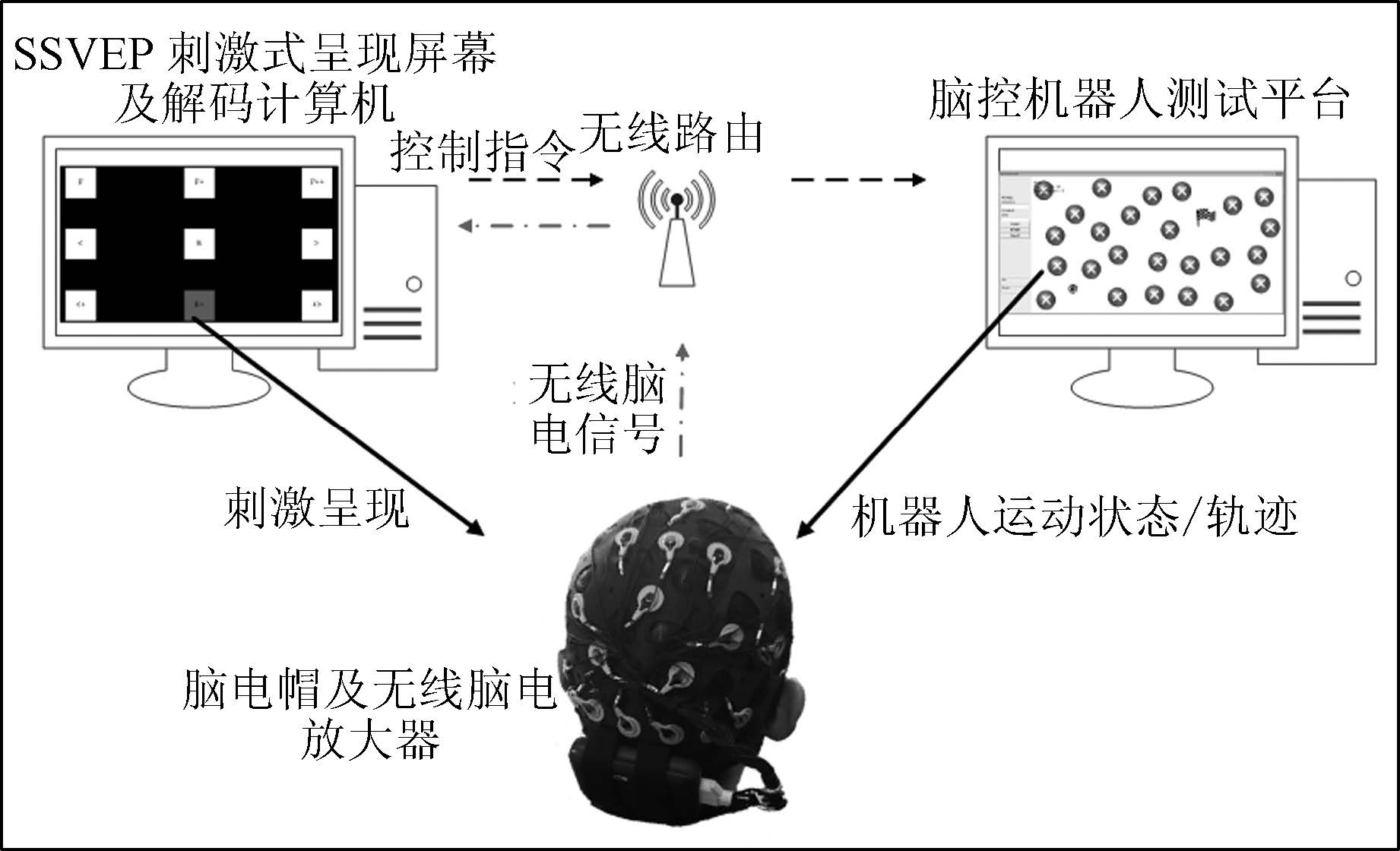
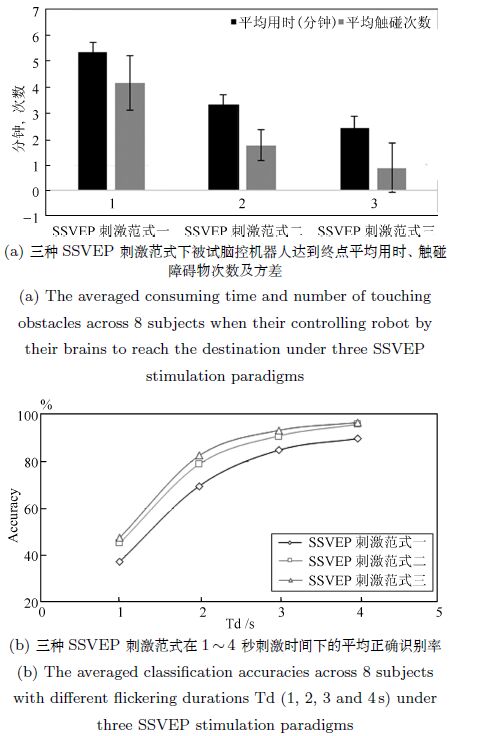
直接用思维意图来控制机器人而没有大脑外周神经和肌肉的参与是人类的一个梦想,目前这一研究已成为国际前沿热点和突破点.传统的脑控机器人(Brain-controlled robot,BCR)主要控制其方向,而本文旨在探讨能够同时脑控机器人方向和速度的有效方法.采用可分类目标数多、单次识别率高且训练时间短的稳态视觉诱发电位(Steady state visual evoked potentials,SSVEP)脑机交互(Brain-computer/machine interaction,BCI/BMI)方法,为脑控机器人运动规划了向左、向右、前进和后退4个方向,设计了低速、中速和高速3级运动速度并组合了9个脑控指令;进而比较并优化了SSVEP刺激目标布局间距以及刺激目标闪烁时间,采用典型相关分析(Canonical correlation analysis,CCA)进行识别.结果表明恰当设置SSVEP刺激目标数及其布局间距和刺激目标闪烁时间,可以有效提高被试/用户直接脑控机器人的性能;优化的SSVEP刺激范式三结合适应SSVEP解码的典型相关分析,8名被试脑控机器人到达终点平均用时为2分40秒,最少用时1分29秒;同时,在脑控机器人运动过程中触碰障碍平均次数为0.88,最少碰触次数为0.本研究显示基于SSVEP的脑机交互可以作为直接脑控机器人灵活运动的一种可选方法,能够实现对机器人多个运动方向和多级速度的控制;也证实了适当增加刺激目标间距可以有效提高SSVEP-BCI脑控指令识别的正确率,说明了该脑控方法的性能与刺激被试的范式有关;再次验证了CCA算法在基于SSVEP的脑机交互中具有优良的效果.最后,为克服单一SSVEP范式存在的局限,本研究也尝试把该范式与运动想象相结合的混合范式用于脑控机器人方向和速度,并进行了初步的研究,表明可以进一步改善控制速度和提高被试舒适度.本文可望为基于SSVEP或与运动想象混合的脑机交互应用于分级或精细控制机器人方向和速度提供思路,并为直接脑控机器人技术推向实际应用打下一定的基础.
直接用思维意图来控制机器人而没有大脑外周神经和肌肉的参与是人类的一个梦想,目前这一研究已成为国际前沿热点和突破点.传统的脑控机器人(Brain-controlled robot,BCR)主要控制其方向,而本文旨在探讨能够同时脑控机器人方向和速度的有效方法.采用可分类目标数多、单次识别率高且训练时间短的稳态视觉诱发电位(Steady state visual evoked potentials,SSVEP)脑机交互(Brain-computer/machine interaction,BCI/BMI)方法,为脑控机器人运动规划了向左、向右、前进和后退4个方向,设计了低速、中速和高速3级运动速度并组合了9个脑控指令;进而比较并优化了SSVEP刺激目标布局间距以及刺激目标闪烁时间,采用典型相关分析(Canonical correlation analysis,CCA)进行识别.结果表明恰当设置SSVEP刺激目标数及其布局间距和刺激目标闪烁时间,可以有效提高被试/用户直接脑控机器人的性能;优化的SSVEP刺激范式三结合适应SSVEP解码的典型相关分析,8名被试脑控机器人到达终点平均用时为2分40秒,最少用时1分29秒;同时,在脑控机器人运动过程中触碰障碍平均次数为0.88,最少碰触次数为0.本研究显示基于SSVEP的脑机交互可以作为直接脑控机器人灵活运动的一种可选方法,能够实现对机器人多个运动方向和多级速度的控制;也证实了适当增加刺激目标间距可以有效提高SSVEP-BCI脑控指令识别的正确率,说明了该脑控方法的性能与刺激被试的范式有关;再次验证了CCA算法在基于SSVEP的脑机交互中具有优良的效果.最后,为克服单一SSVEP范式存在的局限,本研究也尝试把该范式与运动想象相结合的混合范式用于脑控机器人方向和速度,并进行了初步的研究,表明可以进一步改善控制速度和提高被试舒适度.本文可望为基于SSVEP或与运动想象混合的脑机交互应用于分级或精细控制机器人方向和速度提供思路,并为直接脑控机器人技术推向实际应用打下一定的基础.

2016, 42(11): 1641-1647.
doi: 10.16383/j.aas.2016.c150859
cstr: 32138.14.j.aas.2016.c150859
摘要:
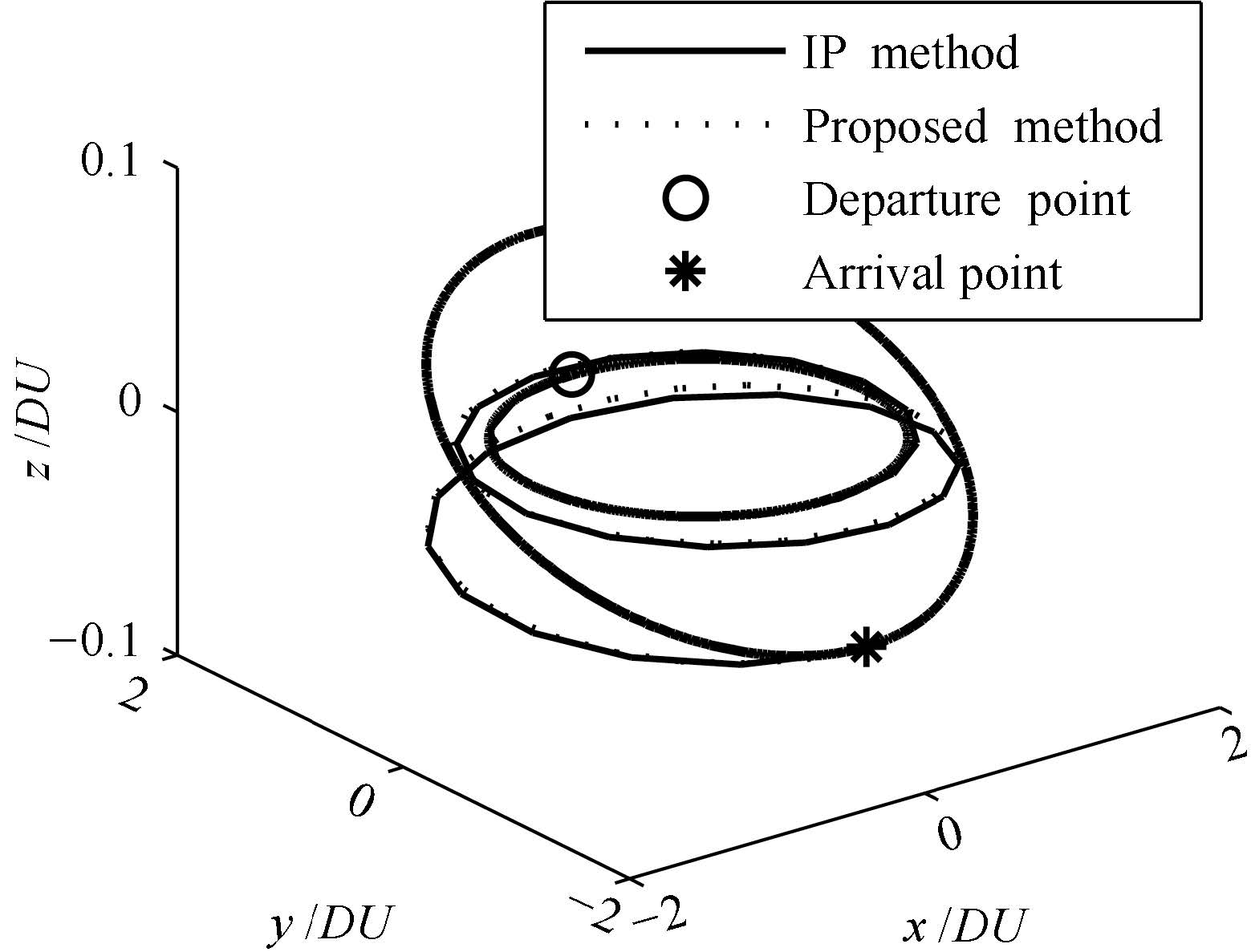
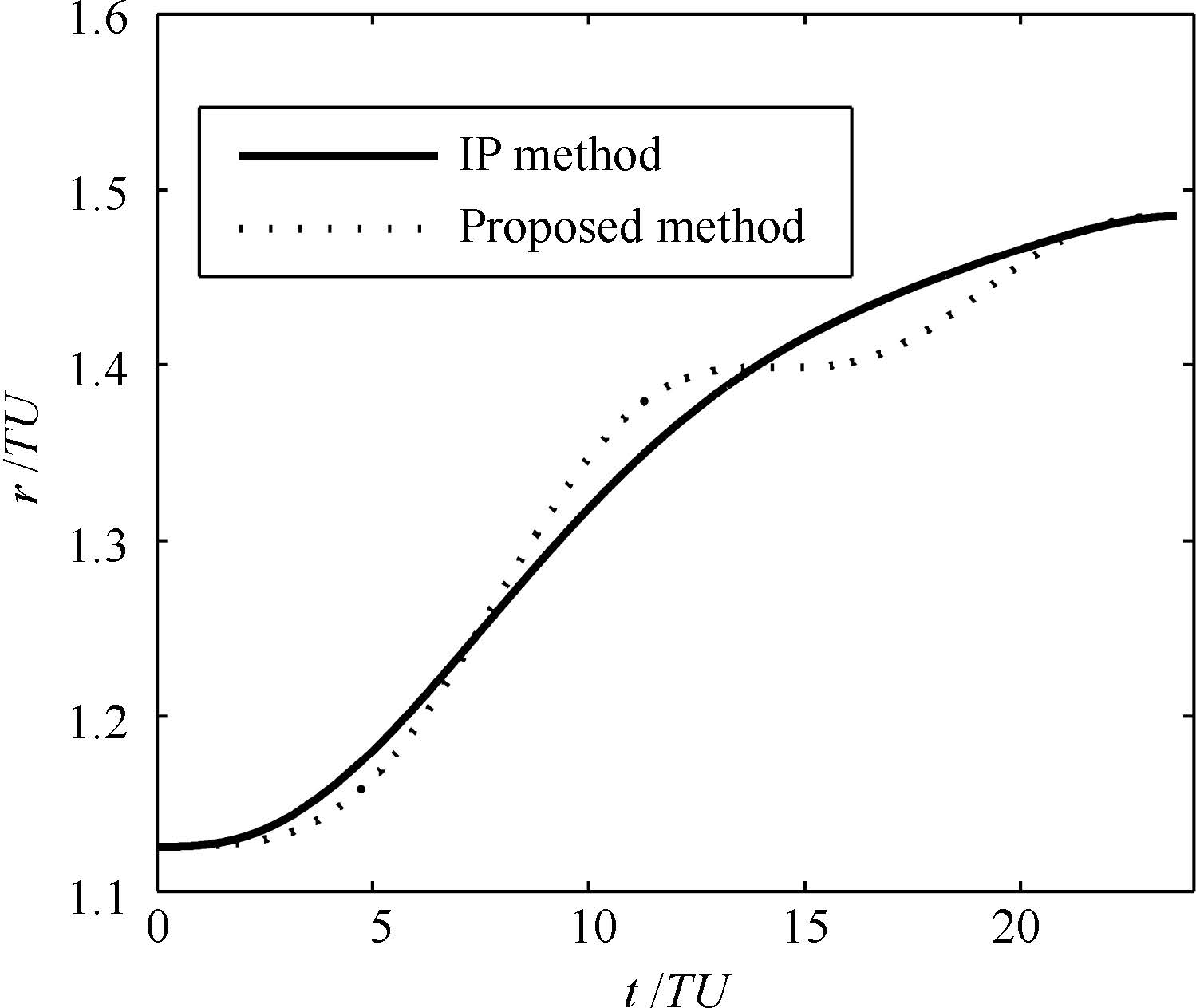
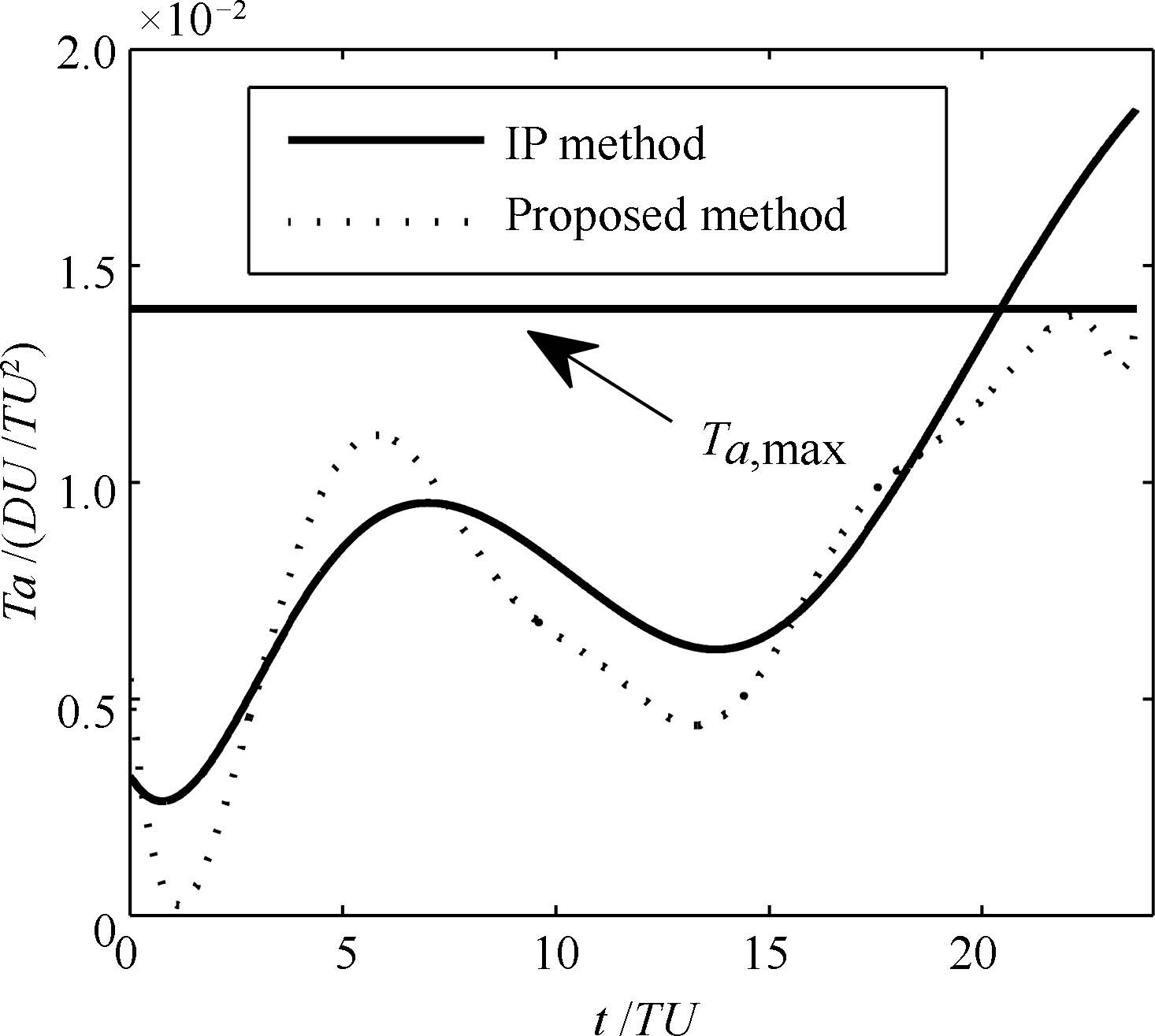
为了满足小推力航天器交会轨迹的快速性设计需求,基于形状逼近理论,设计了一种三维轨迹模型.将轨迹设计问题转换为求解傅里叶级数的系数问题,避免了轨迹运动方程非线性强、难以求解的难题,极大地提高了计算效率.考虑到推力加速度的限制,建立了加速度约束方程,并结合轨迹的运动方程,给出了傅里叶级数的求解过程.同时根据边界条件和最大推力加速度值,定性地分析了傅里叶系数的存在条件.仿真验证了该方法的正确性和可行性,并从计算效率上与高斯伪谱法进行了对比,结果表明本文的方法计算耗时仅为高斯伪谱法的0.67%.
为了满足小推力航天器交会轨迹的快速性设计需求,基于形状逼近理论,设计了一种三维轨迹模型.将轨迹设计问题转换为求解傅里叶级数的系数问题,避免了轨迹运动方程非线性强、难以求解的难题,极大地提高了计算效率.考虑到推力加速度的限制,建立了加速度约束方程,并结合轨迹的运动方程,给出了傅里叶级数的求解过程.同时根据边界条件和最大推力加速度值,定性地分析了傅里叶系数的存在条件.仿真验证了该方法的正确性和可行性,并从计算效率上与高斯伪谱法进行了对比,结果表明本文的方法计算耗时仅为高斯伪谱法的0.67%.

2016, 42(11): 1648-1656.
doi: 10.16383/j.aas.2016.c160258
cstr: 32138.14.j.aas.2016.c160258
摘要:
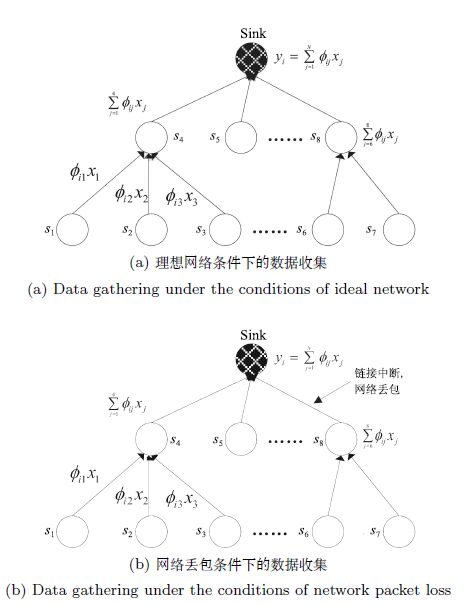
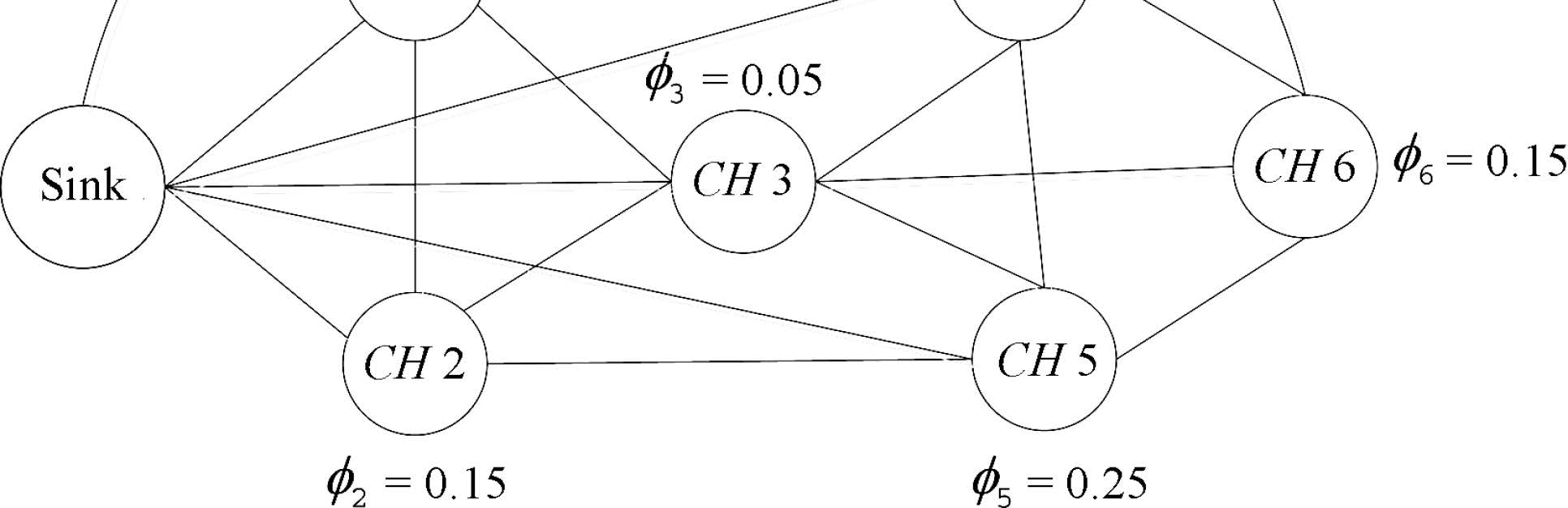
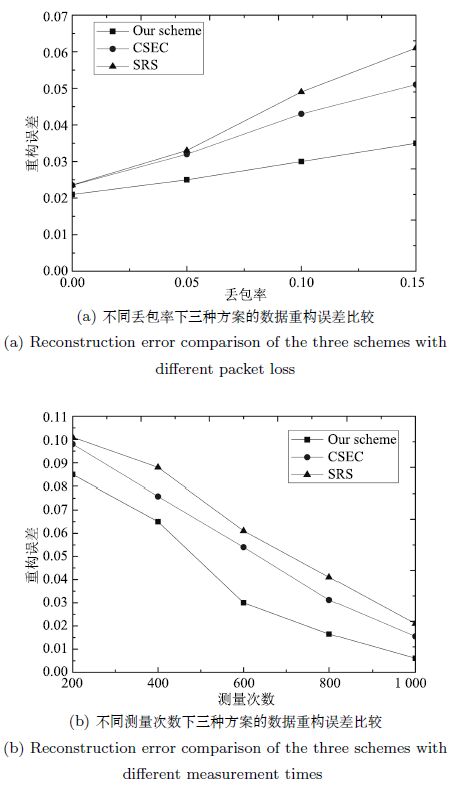
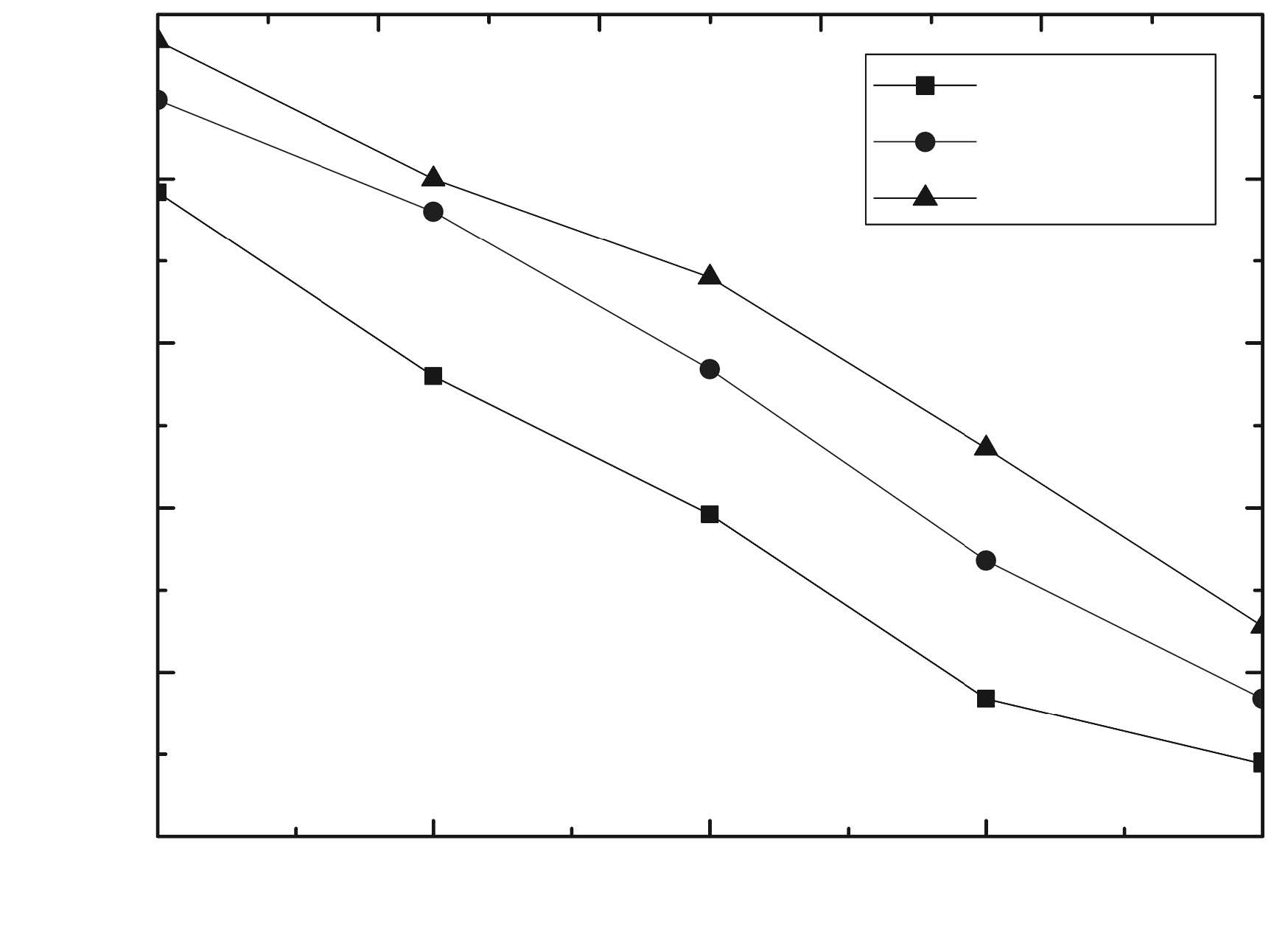
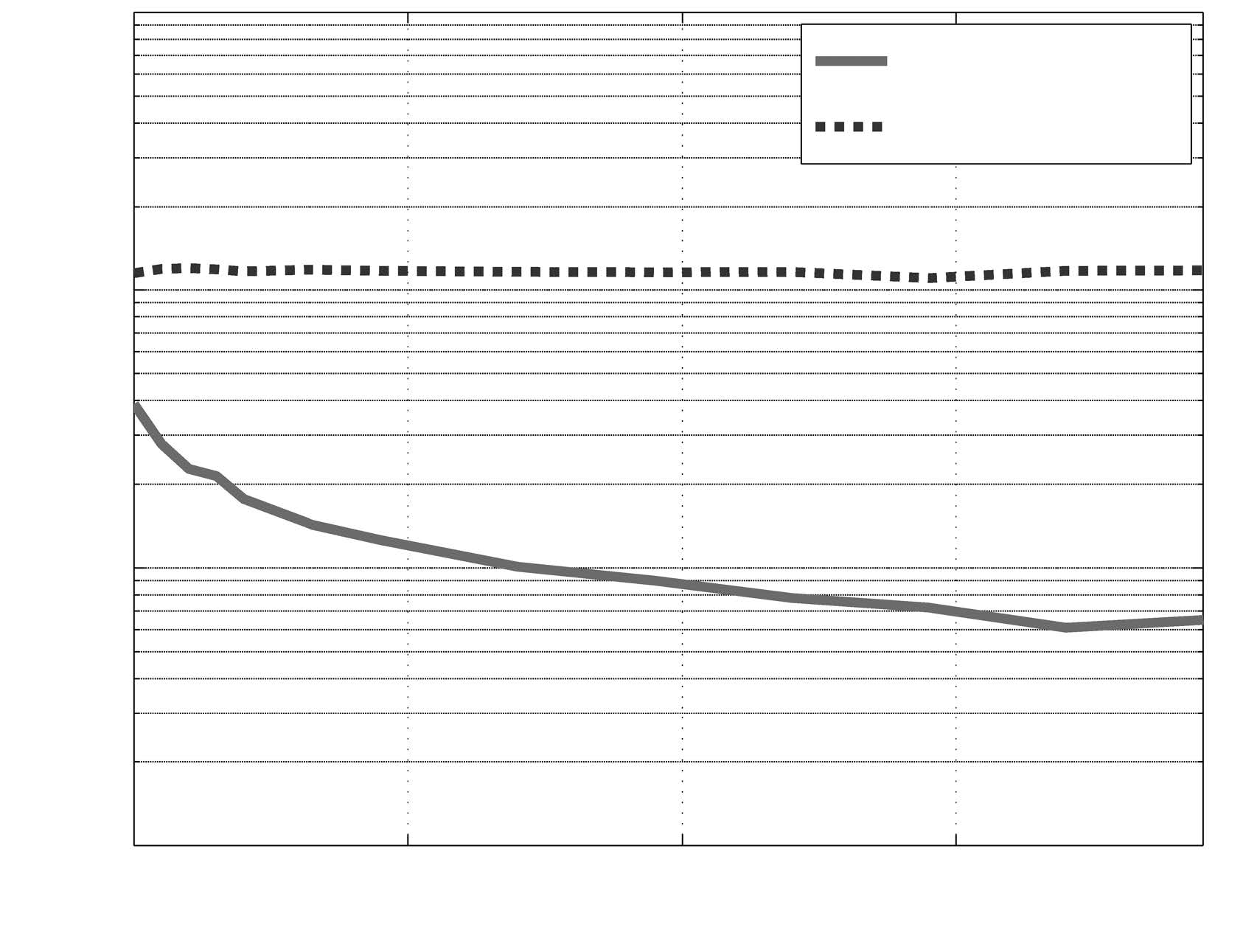
可靠高效的数据收集是无线传感器网络(Wireless sensor networks,WSN)应用中的关键问题.然而,由于无线通信链路的高失效率、节点资源受限以及环境恶劣等原因,网络容易发生丢包问题,使得现有的数据收集方法无法同时满足高精度和低能耗的要求.为此,本文提出了一种基于压缩感知的高能效数据收集方案.该方案主要分为节点上的数据处理和数据收集路径优化两个步骤.首先设计了基于指数核函数的稀疏矩阵来对感知数据进行稀疏化处理,然后综合考虑了数据的传输能耗和可靠性等因素,采用分块矩阵的思路,将单位矩阵和准循环低密度奇偶校验(Low density parity check,LDPC)码的校验矩阵相结合构造了测量矩阵,并证明了它与稀疏矩阵之间满足限制等距性质(Restricted isometry property,RIP).最后,将数据收集路径优化问题建模为哈密尔顿回路问题,并提出了基于树分解的路径优化算法进行求解.仿真结果表明,在网络存在丢包的情况下,本文方案仍然能够保证数据收集的高精确度,相比于其他数据收集方案而言,本文方案在数据重构误差和能耗方面的性能更优.
可靠高效的数据收集是无线传感器网络(Wireless sensor networks,WSN)应用中的关键问题.然而,由于无线通信链路的高失效率、节点资源受限以及环境恶劣等原因,网络容易发生丢包问题,使得现有的数据收集方法无法同时满足高精度和低能耗的要求.为此,本文提出了一种基于压缩感知的高能效数据收集方案.该方案主要分为节点上的数据处理和数据收集路径优化两个步骤.首先设计了基于指数核函数的稀疏矩阵来对感知数据进行稀疏化处理,然后综合考虑了数据的传输能耗和可靠性等因素,采用分块矩阵的思路,将单位矩阵和准循环低密度奇偶校验(Low density parity check,LDPC)码的校验矩阵相结合构造了测量矩阵,并证明了它与稀疏矩阵之间满足限制等距性质(Restricted isometry property,RIP).最后,将数据收集路径优化问题建模为哈密尔顿回路问题,并提出了基于树分解的路径优化算法进行求解.仿真结果表明,在网络存在丢包的情况下,本文方案仍然能够保证数据收集的高精确度,相比于其他数据收集方案而言,本文方案在数据重构误差和能耗方面的性能更优.

2016, 42(11): 1657-1663.
doi: 10.16383/j.aas.2016.c160050
cstr: 32138.14.j.aas.2016.c160050
摘要:
针对闭环控制系统提出一种基于新息估计和正交投影的闭环子空间模型辨识方法.首先采用最小二乘法对VARX模型(Vector autoregressive with exogenous inputs model)进行计算得到新息估计值,然后通过将由观测输入输出数据构造的Hankel矩阵正交投影到新息数据的正交补空间以消除噪声影响,从而在无噪声的输入输出数据奇偶空间中提取得到扩展可观测矩阵和下三角形Toeplitz矩阵.最后采用平移变换法得到系统矩阵.对该算法严格分析和证明了实现一致估计的条件.通过仿真实例验证了本文方法的有效性和优越性.
针对闭环控制系统提出一种基于新息估计和正交投影的闭环子空间模型辨识方法.首先采用最小二乘法对VARX模型(Vector autoregressive with exogenous inputs model)进行计算得到新息估计值,然后通过将由观测输入输出数据构造的Hankel矩阵正交投影到新息数据的正交补空间以消除噪声影响,从而在无噪声的输入输出数据奇偶空间中提取得到扩展可观测矩阵和下三角形Toeplitz矩阵.最后采用平移变换法得到系统矩阵.对该算法严格分析和证明了实现一致估计的条件.通过仿真实例验证了本文方法的有效性和优越性.



2016, 42(11): 1664-1679.
doi: 10.16383/j.aas.2016.c150819
cstr: 32138.14.j.aas.2016.c150819
摘要:
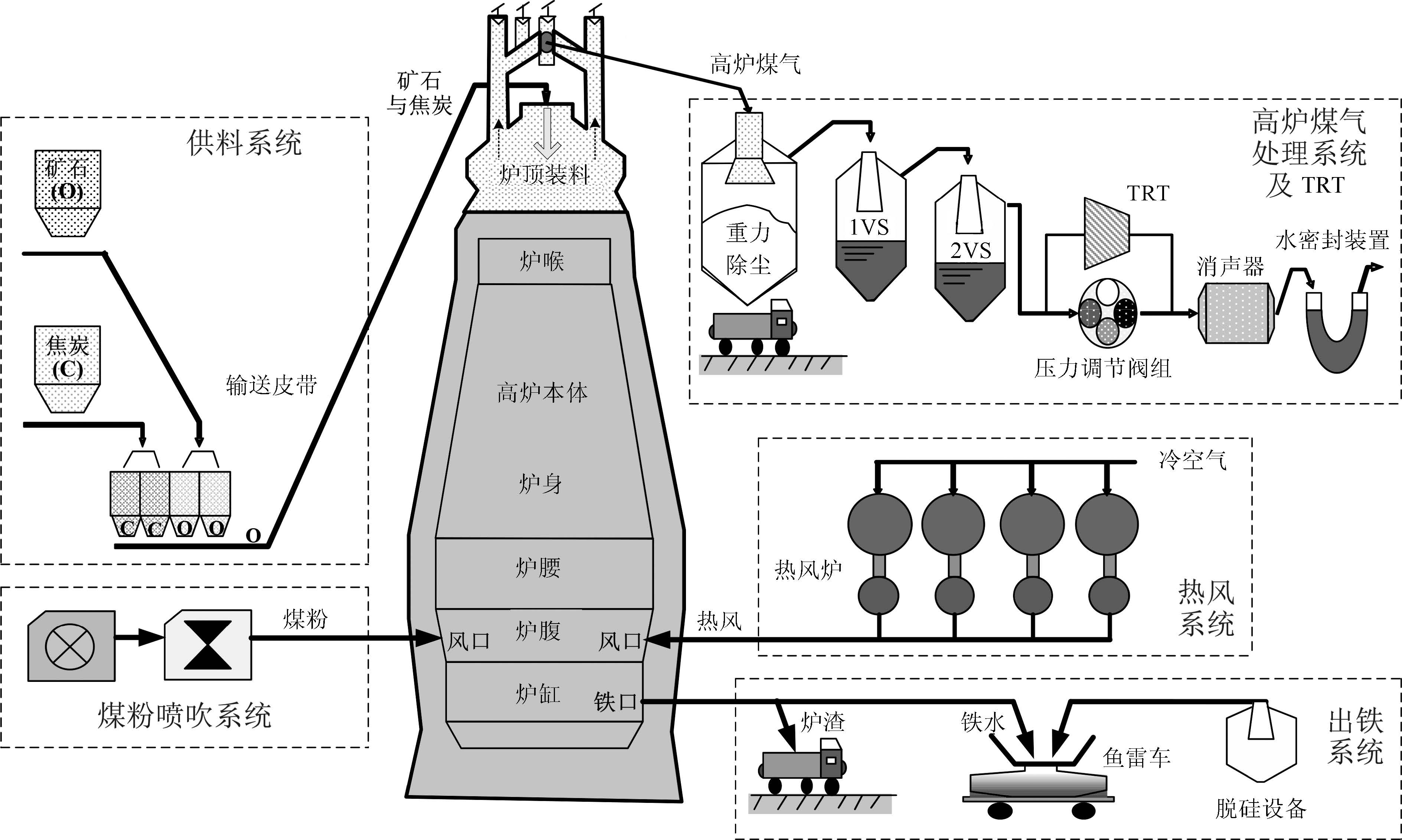
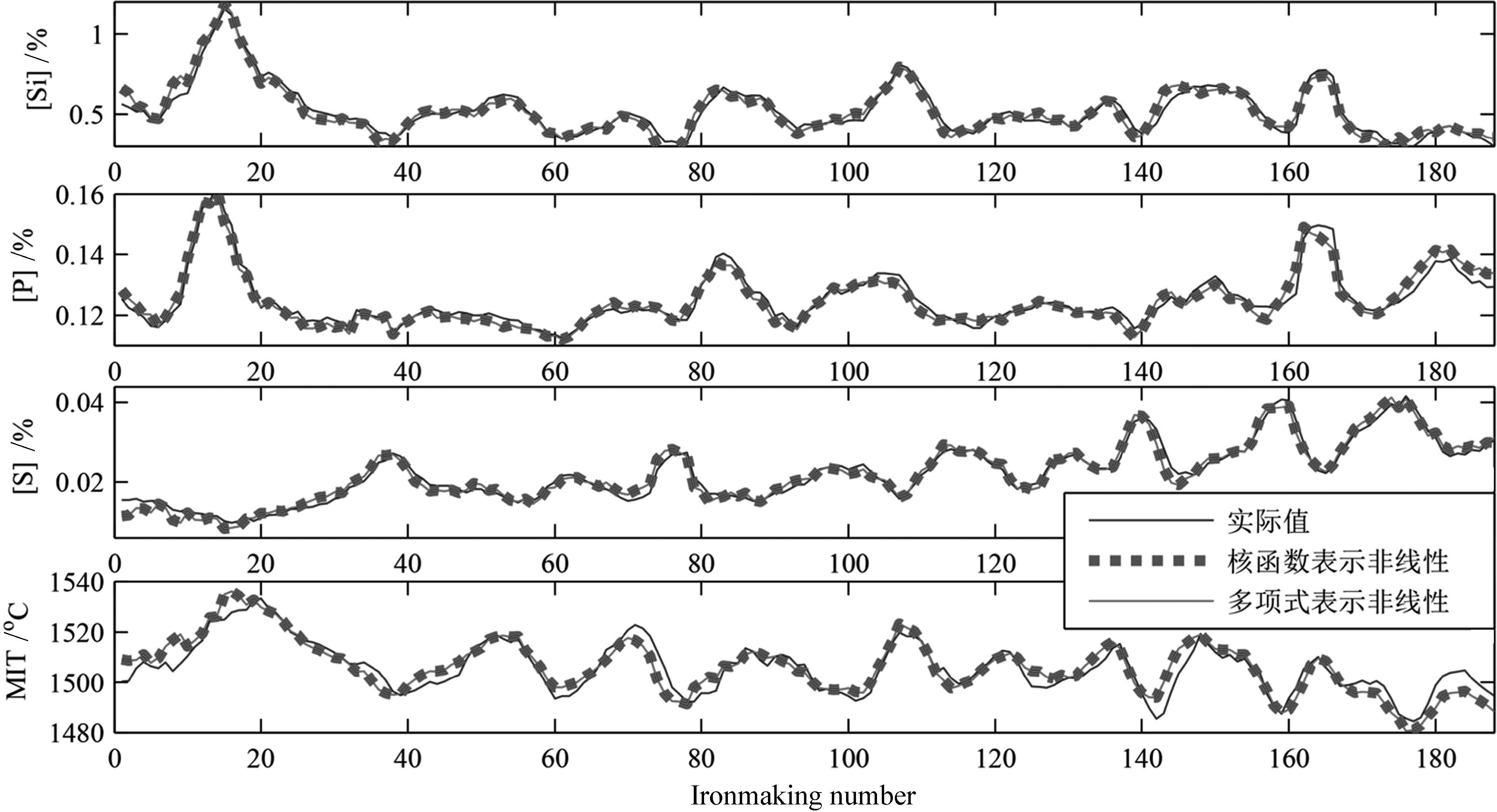
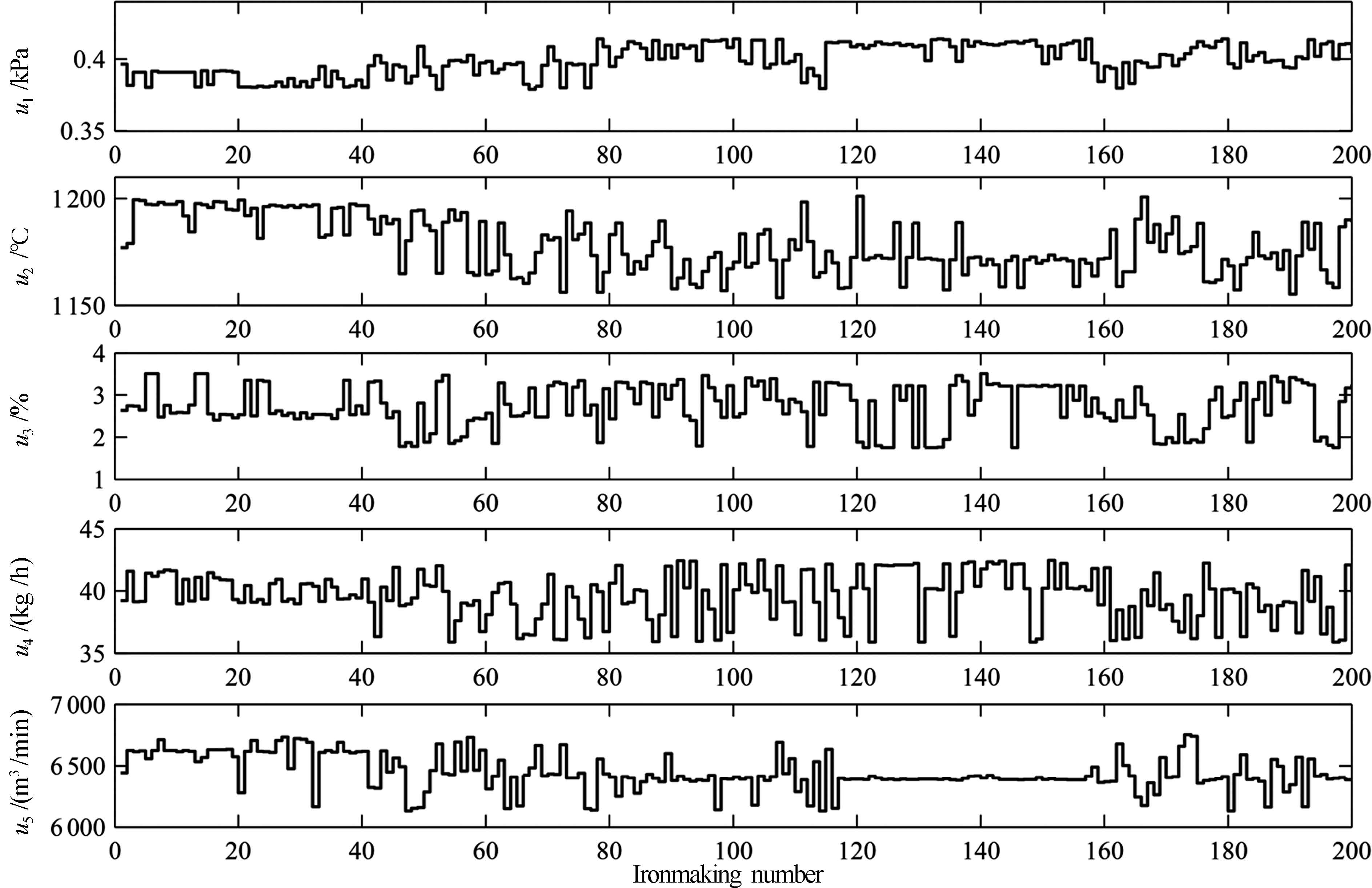
高炉炼铁是一个物理化学反应复杂、多相多场耦合的大滞后、非线性动态系统,其关键工艺指标——铁水质量参数的检测、建模和控制一直是冶金工程和自动控制领域的难题.本文提出一种面向控制的数据驱动高炉炼铁多元铁水质量非线性子空间建模方法.首先,为了提高建模效率和降低计算复杂度,采用数据驱动典型相关性分析与相关性分析相结合的方法提取与铁水质量相关性最强的关键可控变量作为建模的输入变量;同时,为了更好地反映高炉非线性动态特性,将相关输入输出变量的时序和时滞关系在建模过程进行考虑;最后,采用基于最小二乘支持向量机(Least square support vector machine,LS-SVM)的非线性Hammerstein系统子空间辨识方法建立数据驱动的多元铁水质量非线性状态空间模型.同时,将核函数表示的模型非线性特性用多项式函数拟合,在仅损失很小模型精度的前提下大大降低模型的计算复杂度.基于实际数据的工业试验验证了所提建模方法的准确性、有效性和先进性.
高炉炼铁是一个物理化学反应复杂、多相多场耦合的大滞后、非线性动态系统,其关键工艺指标——铁水质量参数的检测、建模和控制一直是冶金工程和自动控制领域的难题.本文提出一种面向控制的数据驱动高炉炼铁多元铁水质量非线性子空间建模方法.首先,为了提高建模效率和降低计算复杂度,采用数据驱动典型相关性分析与相关性分析相结合的方法提取与铁水质量相关性最强的关键可控变量作为建模的输入变量;同时,为了更好地反映高炉非线性动态特性,将相关输入输出变量的时序和时滞关系在建模过程进行考虑;最后,采用基于最小二乘支持向量机(Least square support vector machine,LS-SVM)的非线性Hammerstein系统子空间辨识方法建立数据驱动的多元铁水质量非线性状态空间模型.同时,将核函数表示的模型非线性特性用多项式函数拟合,在仅损失很小模型精度的前提下大大降低模型的计算复杂度.基于实际数据的工业试验验证了所提建模方法的准确性、有效性和先进性.







2016, 42(11): 1680-1690.
doi: 10.16383/j.aas.2016.c150234
cstr: 32138.14.j.aas.2016.c150234
摘要:
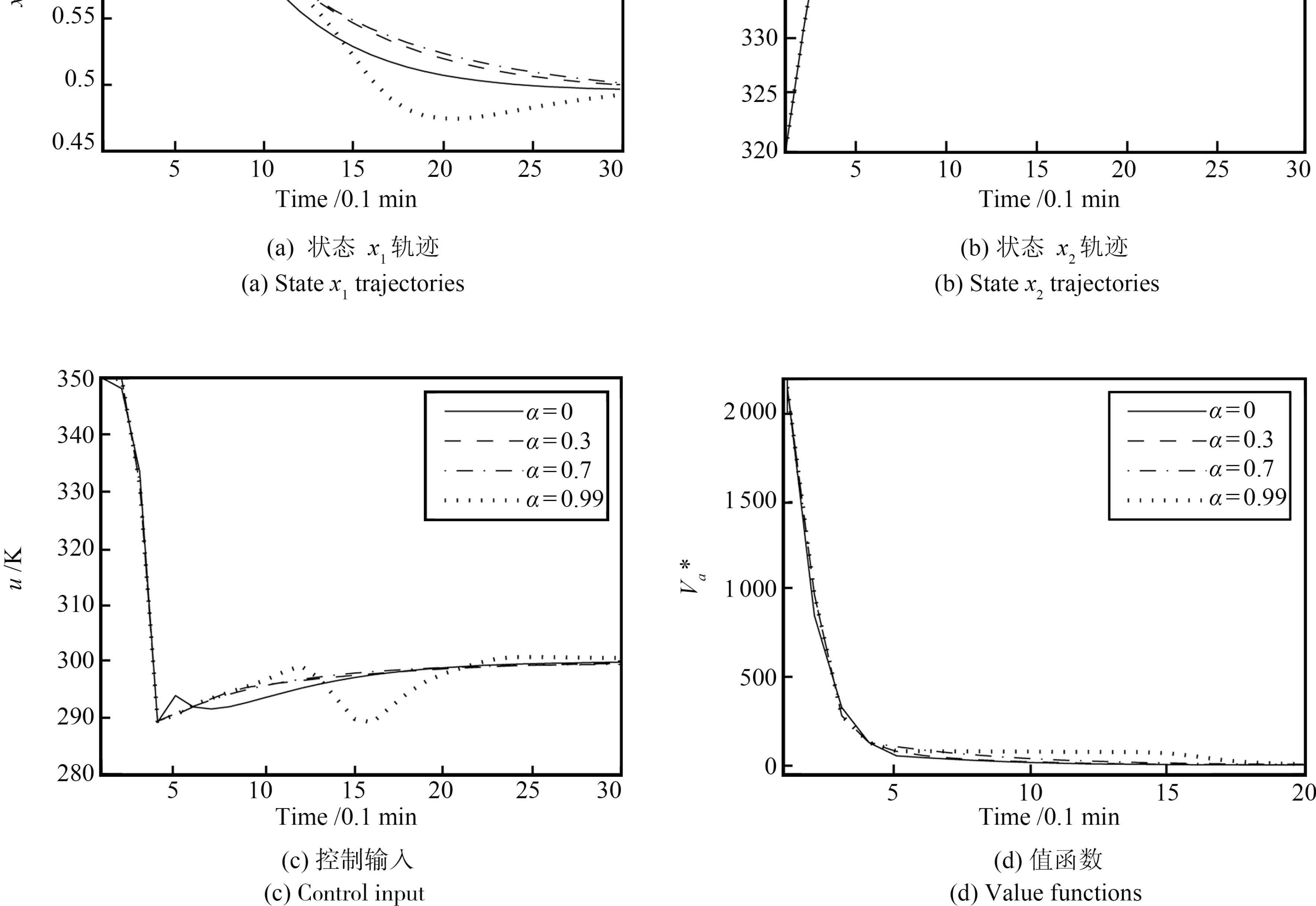
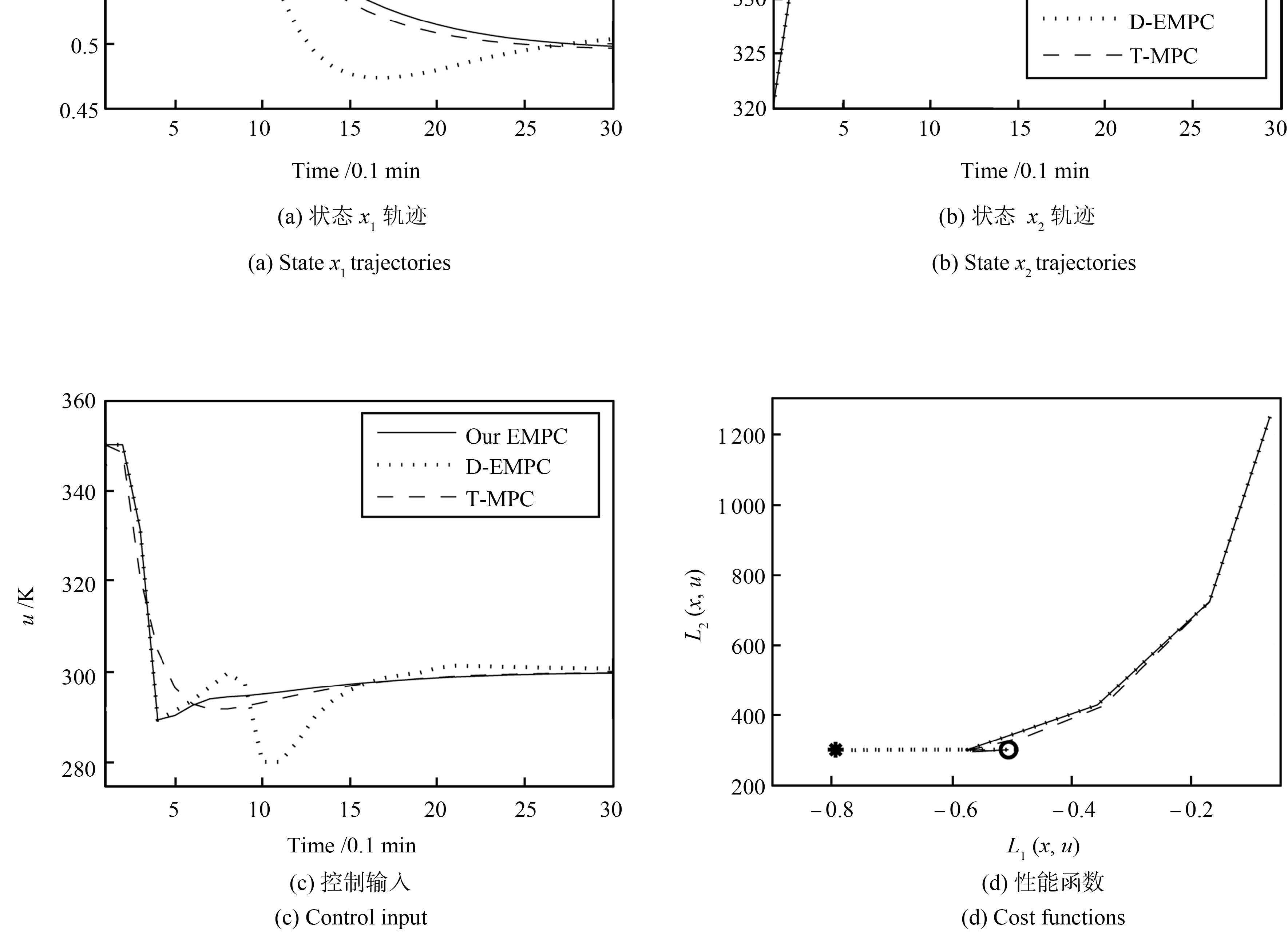
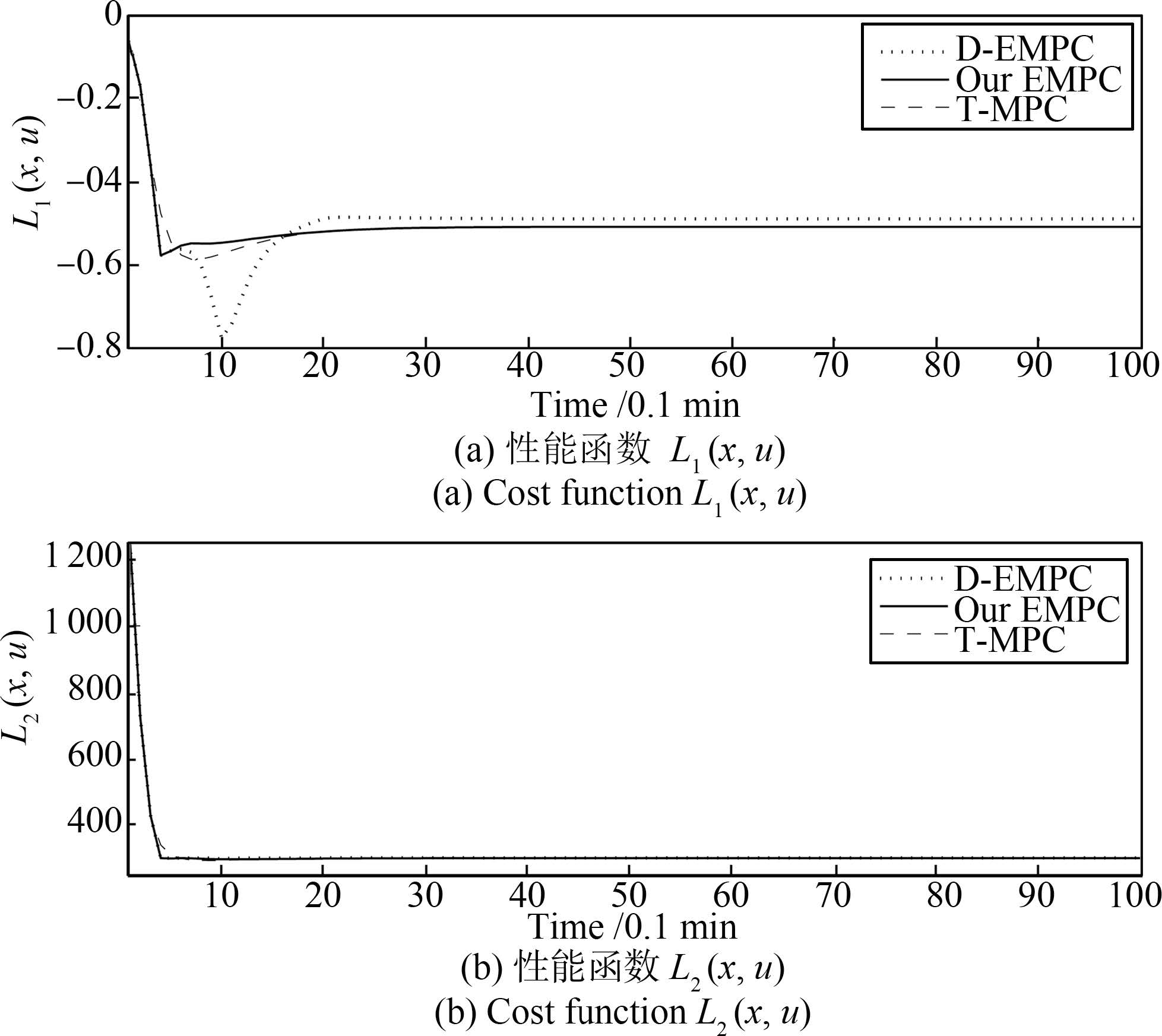
考虑约束非线性系统,提出一种新的具有稳定性保证的经济模型预测控制(Economic model predictive control,EMPC)策略.由于经济性能指标的非凸性和非正定性,引入关于经济最优平衡点的正定辅助函数.利用辅助函数的最优值函数定义原始EMPC优化问题的稳定性约束.应用终端约束集、终端代价函数和局部控制器三要素,建立闭环系统关于经济最优平衡点的渐近稳定性和渐近平均性能.进一步,结合多目标理想点概念,将提出的控制策略用于多个经济性能指标的优化控制,得到稳定多目标EMPC策略.最后,以连续搅拌反应器为例,比较仿真结果验证本文策略的有效性.
考虑约束非线性系统,提出一种新的具有稳定性保证的经济模型预测控制(Economic model predictive control,EMPC)策略.由于经济性能指标的非凸性和非正定性,引入关于经济最优平衡点的正定辅助函数.利用辅助函数的最优值函数定义原始EMPC优化问题的稳定性约束.应用终端约束集、终端代价函数和局部控制器三要素,建立闭环系统关于经济最优平衡点的渐近稳定性和渐近平均性能.进一步,结合多目标理想点概念,将提出的控制策略用于多个经济性能指标的优化控制,得到稳定多目标EMPC策略.最后,以连续搅拌反应器为例,比较仿真结果验证本文策略的有效性.

2016, 42(11): 1691-1701.
doi: 10.16383/j.aas.2016.c150885
cstr: 32138.14.j.aas.2016.c150885
摘要:
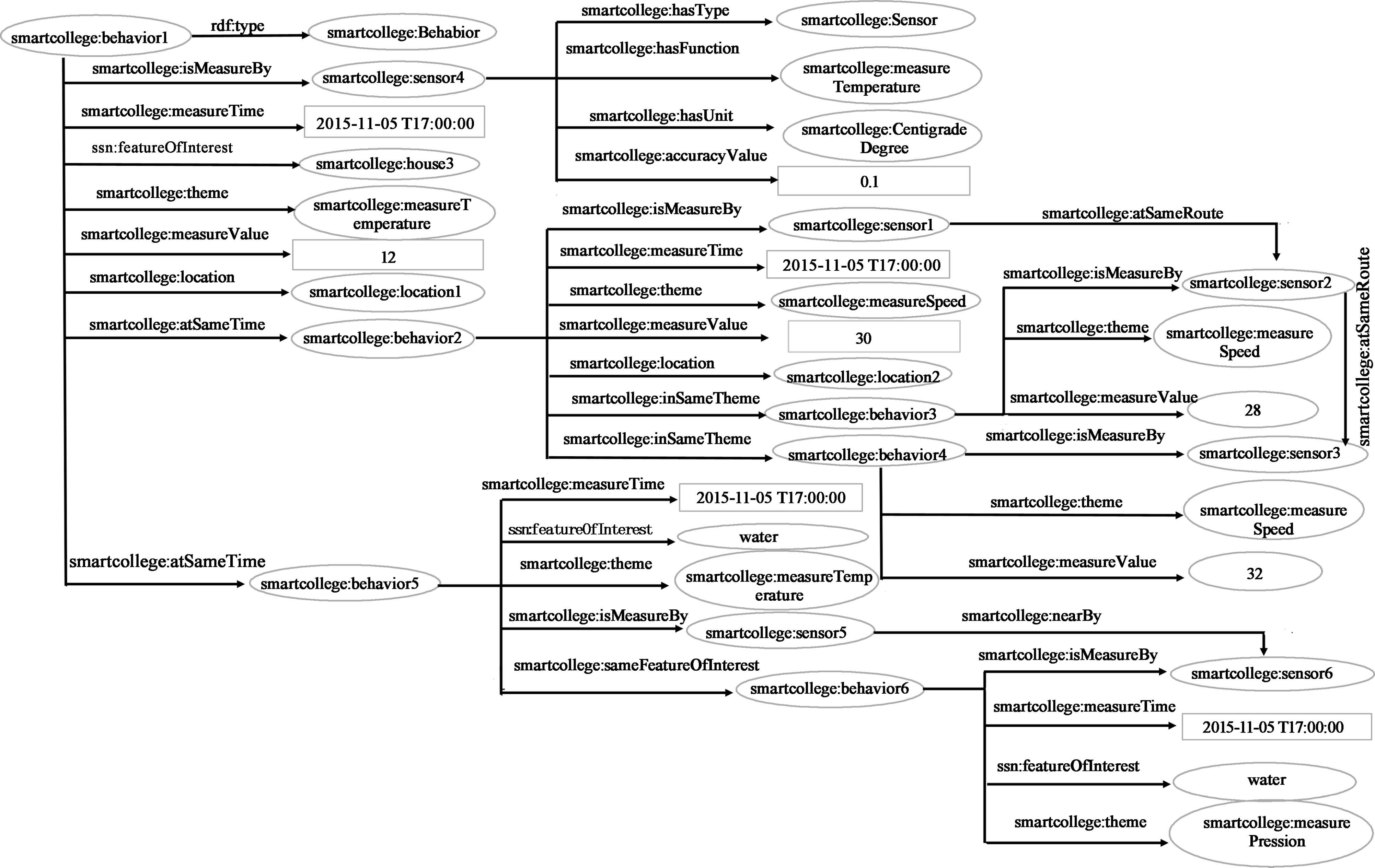
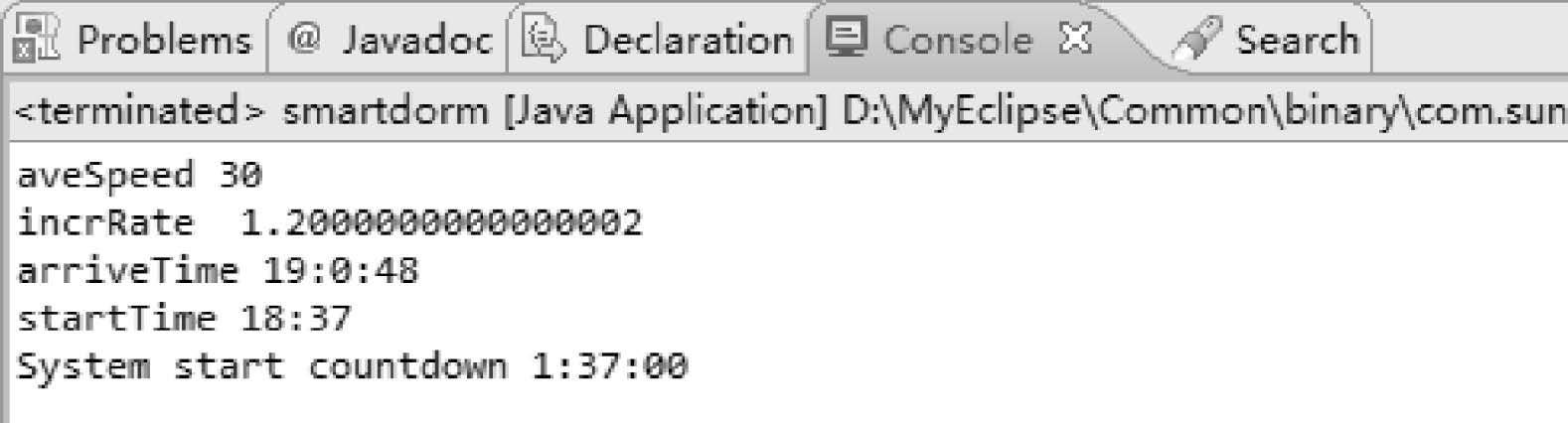
物联网系统包含大量的感知设备,产生大量孤立和异构的感知数据,形成数据孤岛.如何将不同感知设备产生的数据进行有效的语义关联、构建跨域的数据关联模型、屏蔽数据异构性、实现综合智能决策是物联网研究的关键问题.本文以物联网系统为研究对象,从语义入手,构建以环境—资源—行为为核心的物联网本体模型;基于关联数据方法构建以行为关联模型和资源关联模型为核心的物联网语义关联网络;提出一种基于事件的推理算法实现语义推理,从而更好地实现对物联网系统的智能决策;最后,通过两个智能家居系统的实例验证了本文方法的可行性,通过构建不同方法的查询实例验证了本文方法的优越性.
物联网系统包含大量的感知设备,产生大量孤立和异构的感知数据,形成数据孤岛.如何将不同感知设备产生的数据进行有效的语义关联、构建跨域的数据关联模型、屏蔽数据异构性、实现综合智能决策是物联网研究的关键问题.本文以物联网系统为研究对象,从语义入手,构建以环境—资源—行为为核心的物联网本体模型;基于关联数据方法构建以行为关联模型和资源关联模型为核心的物联网语义关联网络;提出一种基于事件的推理算法实现语义推理,从而更好地实现对物联网系统的智能决策;最后,通过两个智能家居系统的实例验证了本文方法的可行性,通过构建不同方法的查询实例验证了本文方法的优越性.

2016, 42(11): 1702-1710.
doi: 10.16383/j.aas.2016.c160005
cstr: 32138.14.j.aas.2016.c160005
摘要:
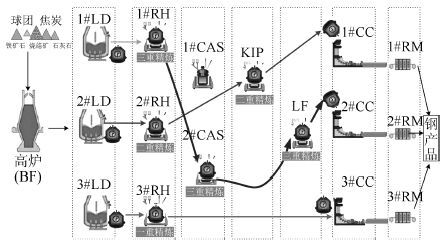
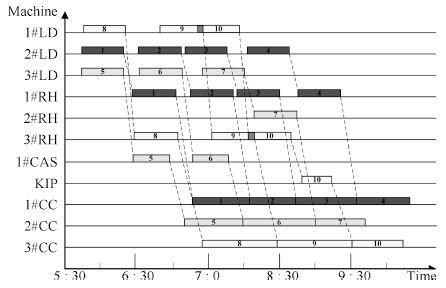
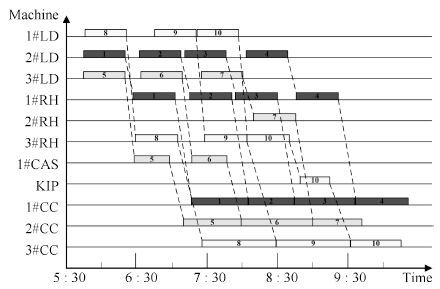
以某钢厂多台转炉及多台精炼炉对多台连铸机的复杂生产线为研究对象,针对其调度过程涉及多设备、多目标、多约束等调度要素,且离散和连续变量混杂,采用常规建模方法难以满足现场对调度的精度及排产速度的需求问题,提出一种新型的两阶段优化建模方法.首先,证明了炉次从炼钢到连铸总等待时间最小的调度目标与该炉次在转炉开始作业时间最大是等价的事实,并以离散型的设备变量为决策变量,以转炉开始作业时间最大为动态规划最优指标,建立设备指派多阶段动态规划基本方程和设备指派优化模型;然后,以炉次在设备开始作业时间的连续型变量为决策变量,并将准时开浇的非线性调度指标转化成与之等价的线性优化目标,以在同一台连铸机上浇铸的炉次之间断浇的时间间隔最小、钢包在设备之间的冗余等待时间最小、提前与滞后理想开浇时间的时间间隔最小为目标,建立线性规划冲突解消模型.工业实验表明所提出两阶段优化建模方法在求解速度与求解精度均满足现场要求.
以某钢厂多台转炉及多台精炼炉对多台连铸机的复杂生产线为研究对象,针对其调度过程涉及多设备、多目标、多约束等调度要素,且离散和连续变量混杂,采用常规建模方法难以满足现场对调度的精度及排产速度的需求问题,提出一种新型的两阶段优化建模方法.首先,证明了炉次从炼钢到连铸总等待时间最小的调度目标与该炉次在转炉开始作业时间最大是等价的事实,并以离散型的设备变量为决策变量,以转炉开始作业时间最大为动态规划最优指标,建立设备指派多阶段动态规划基本方程和设备指派优化模型;然后,以炉次在设备开始作业时间的连续型变量为决策变量,并将准时开浇的非线性调度指标转化成与之等价的线性优化目标,以在同一台连铸机上浇铸的炉次之间断浇的时间间隔最小、钢包在设备之间的冗余等待时间最小、提前与滞后理想开浇时间的时间间隔最小为目标,建立线性规划冲突解消模型.工业实验表明所提出两阶段优化建模方法在求解速度与求解精度均满足现场要求.
2016, 42(11): 1711-1717.
doi: 10.16383/j.aas.2016.c150268
cstr: 32138.14.j.aas.2016.c150268
摘要:
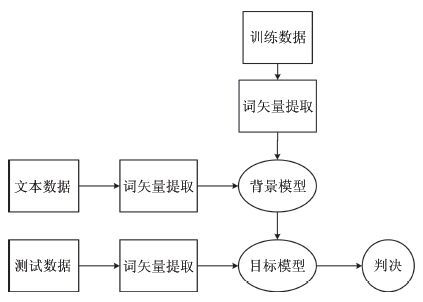
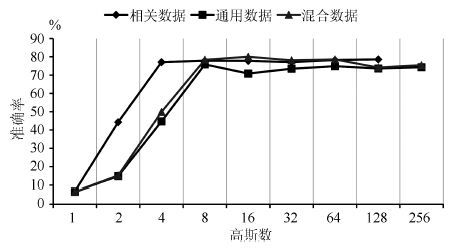
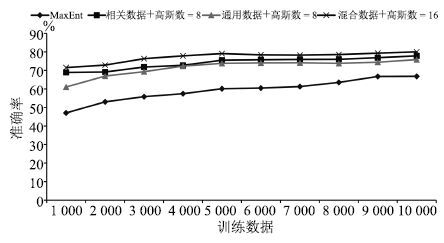
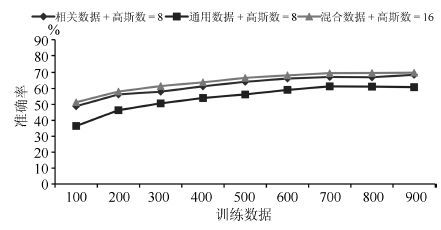
在短文本分类中,面对特征稀疏的短文本,如何充分利用文本中的每一个词语成为关键.本文提出概率语义分布模型的思想,首先通过查询词矢量词典,将文本转换为词矢量数据;其次,在概率语义分布模型的假设下利用混合高斯模型对无标注的文本数据进行通用背景语义模型训练;利用训练数据对通用模型进行自适应得到各个领域的目标领域语义分布模型;最后,在测试过程中,计算短文本属于领域模型的概率,得到最终的分类结果.实验结果表明,本文提出的方法能够从一定程度上利用短文本所提供的信息,有效降低了对训练数据的依赖性,相比于支持向量机(Support vector machine,SVM)和最大熵分类方法性能相对提高了17.7%.
在短文本分类中,面对特征稀疏的短文本,如何充分利用文本中的每一个词语成为关键.本文提出概率语义分布模型的思想,首先通过查询词矢量词典,将文本转换为词矢量数据;其次,在概率语义分布模型的假设下利用混合高斯模型对无标注的文本数据进行通用背景语义模型训练;利用训练数据对通用模型进行自适应得到各个领域的目标领域语义分布模型;最后,在测试过程中,计算短文本属于领域模型的概率,得到最终的分类结果.实验结果表明,本文提出的方法能够从一定程度上利用短文本所提供的信息,有效降低了对训练数据的依赖性,相比于支持向量机(Support vector machine,SVM)和最大熵分类方法性能相对提高了17.7%.
2016, 42(11): 1718-1731.
doi: 10.16383/j.aas.2016.c150309
cstr: 32138.14.j.aas.2016.c150309
摘要:
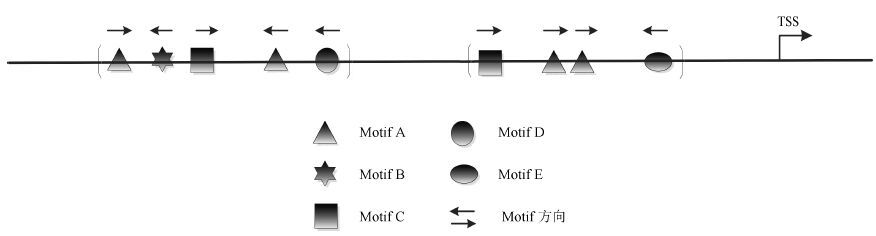
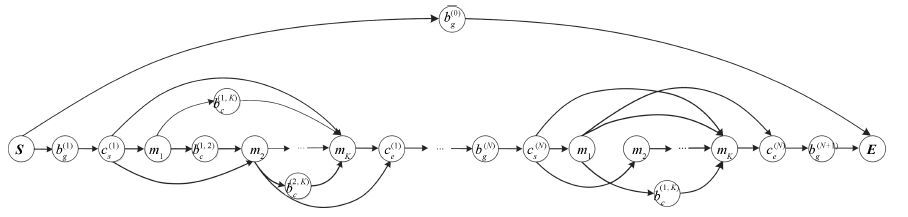
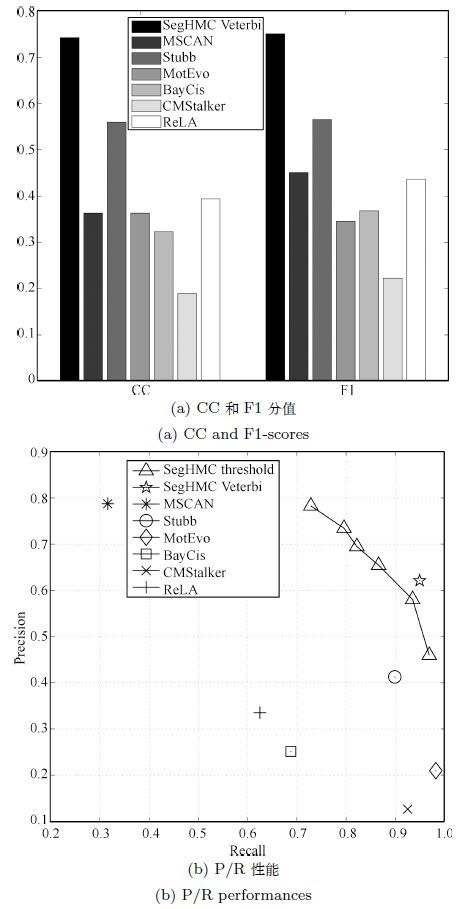
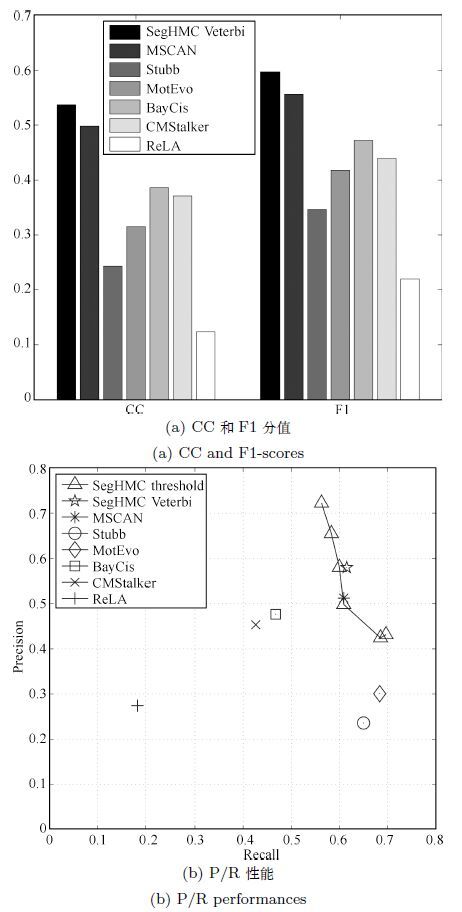
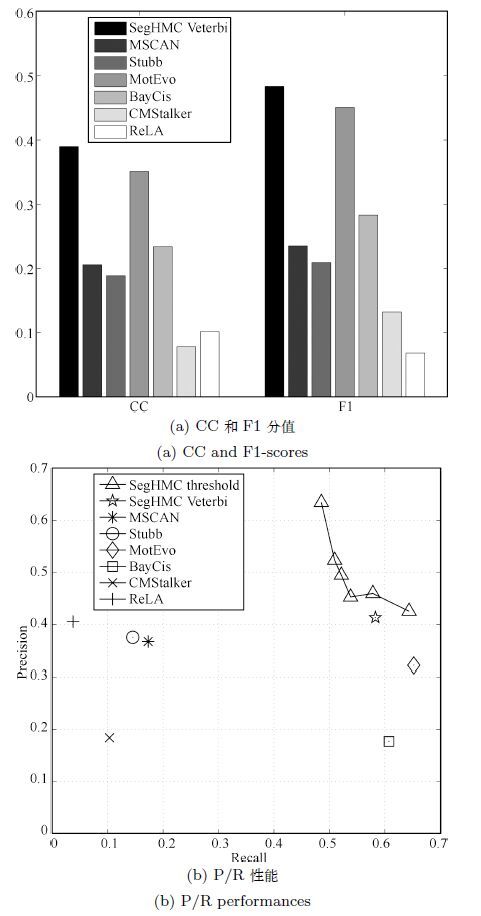
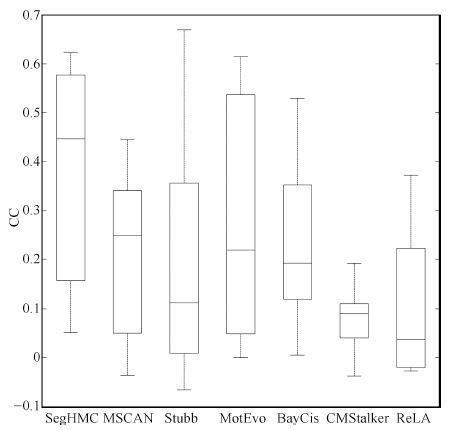
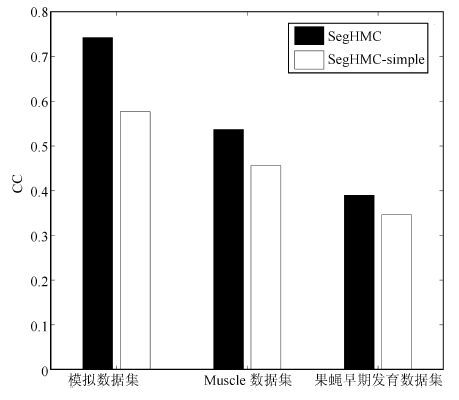
顺式调控模块(Cis-regulatory module,CRM)在真核生物基因的转录调控中起着重要作用,识别顺式调控模块是当前计算生物学的一个重要课题.虽然当前有许多计算方法用于识别顺式调控模块,但识别准确率仍有待进一步提高.将顺式调控模块的多种特征信息结合在一起,有助于提高识别顺式调控模块的准确率.基于此,本文提出了一种识别顺式调控模块的算法SegHMC(Segmental HMM model for discovery of cis-regulatory module).该算法建立了一种关于顺式调控模块识别问题的Segmental HMM模型,进一步扩展了顺式调控模块调控结构(或调控语法)的表示,不仅将顺式调控模块表示为模体(Motif)的组合,还进一步将模体共同出现的频率、模体顺序偏好以及顺式调控模块中相邻模体间的距离分布等特征引入到顺式调控模块的调控语法中.在模拟数据集和真实生物数据集上的实验结果表明,本文方法识别顺式调控模块的准确率显著优于当前的主要方法.
顺式调控模块(Cis-regulatory module,CRM)在真核生物基因的转录调控中起着重要作用,识别顺式调控模块是当前计算生物学的一个重要课题.虽然当前有许多计算方法用于识别顺式调控模块,但识别准确率仍有待进一步提高.将顺式调控模块的多种特征信息结合在一起,有助于提高识别顺式调控模块的准确率.基于此,本文提出了一种识别顺式调控模块的算法SegHMC(Segmental HMM model for discovery of cis-regulatory module).该算法建立了一种关于顺式调控模块识别问题的Segmental HMM模型,进一步扩展了顺式调控模块调控结构(或调控语法)的表示,不仅将顺式调控模块表示为模体(Motif)的组合,还进一步将模体共同出现的频率、模体顺序偏好以及顺式调控模块中相邻模体间的距离分布等特征引入到顺式调控模块的调控语法中.在模拟数据集和真实生物数据集上的实验结果表明,本文方法识别顺式调控模块的准确率显著优于当前的主要方法.
2016, 42(11): 1732-1743.
doi: 10.16383/j.aas.2016.c150618
cstr: 32138.14.j.aas.2016.c150618
摘要:
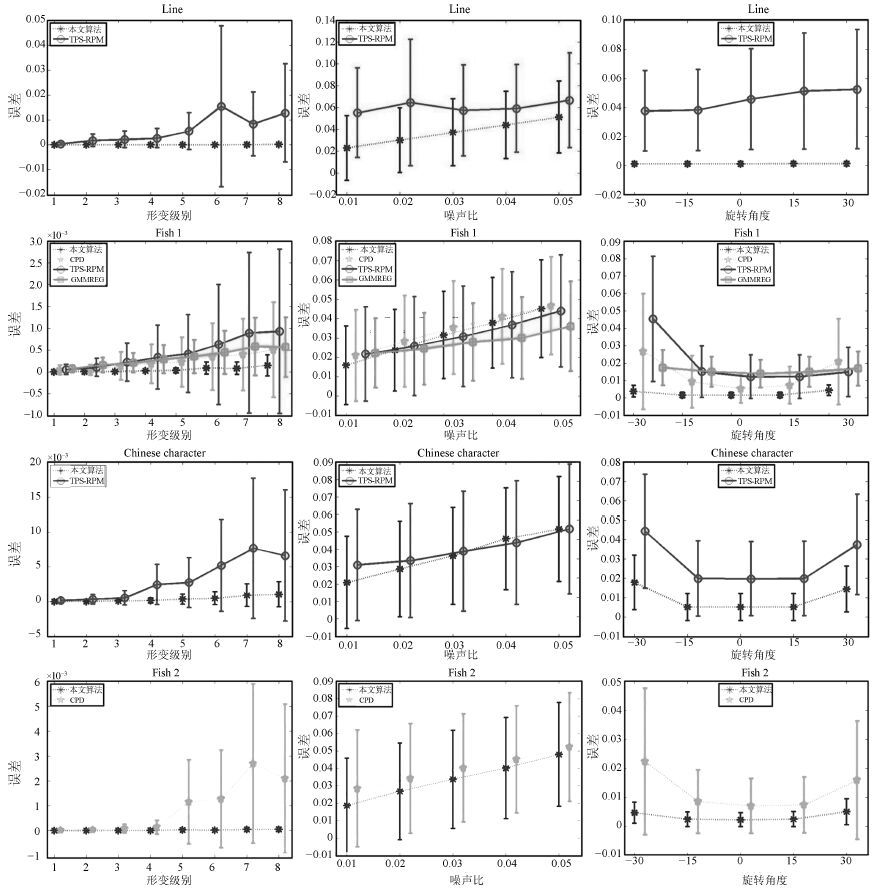
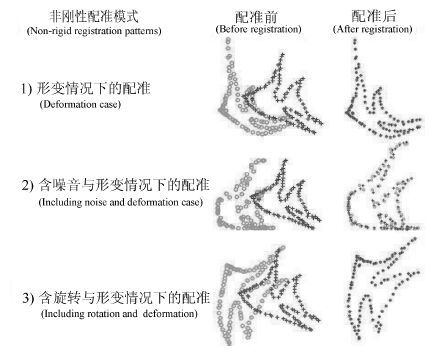
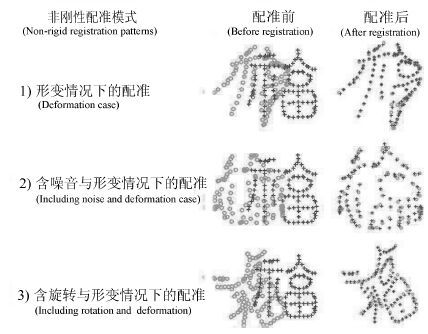
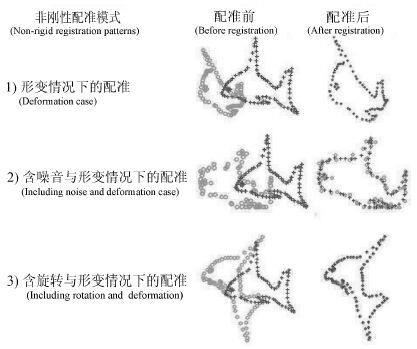
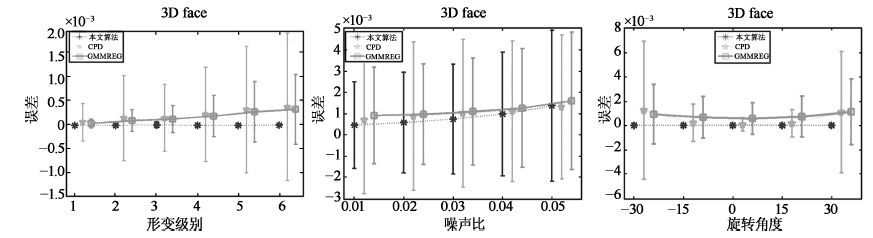
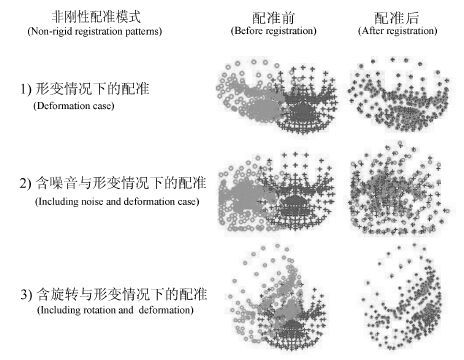
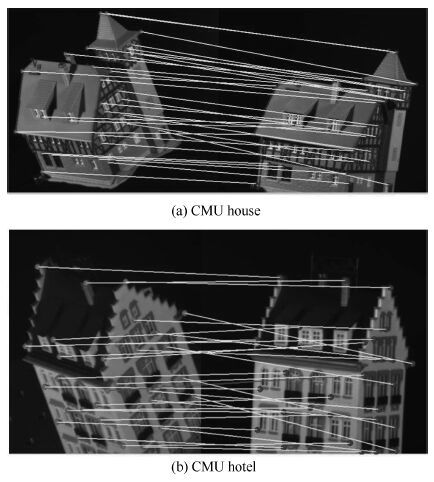
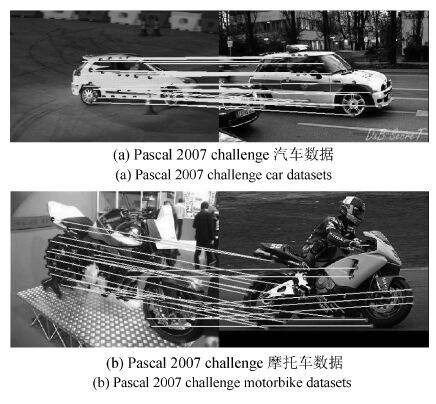
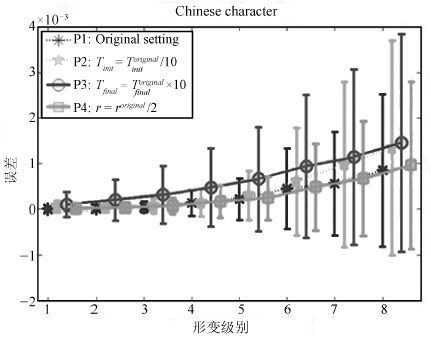
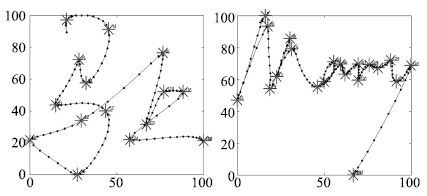
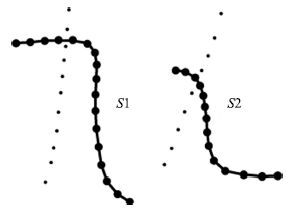
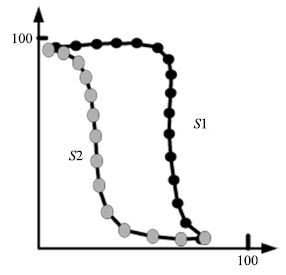
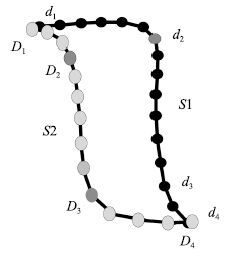
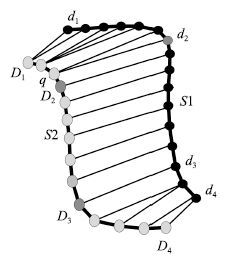
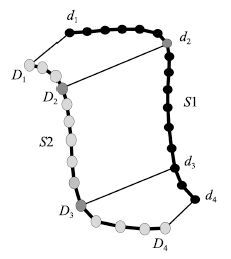
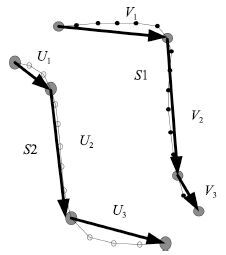
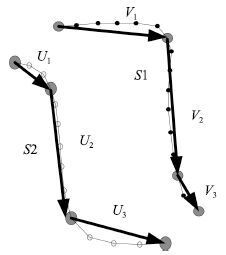
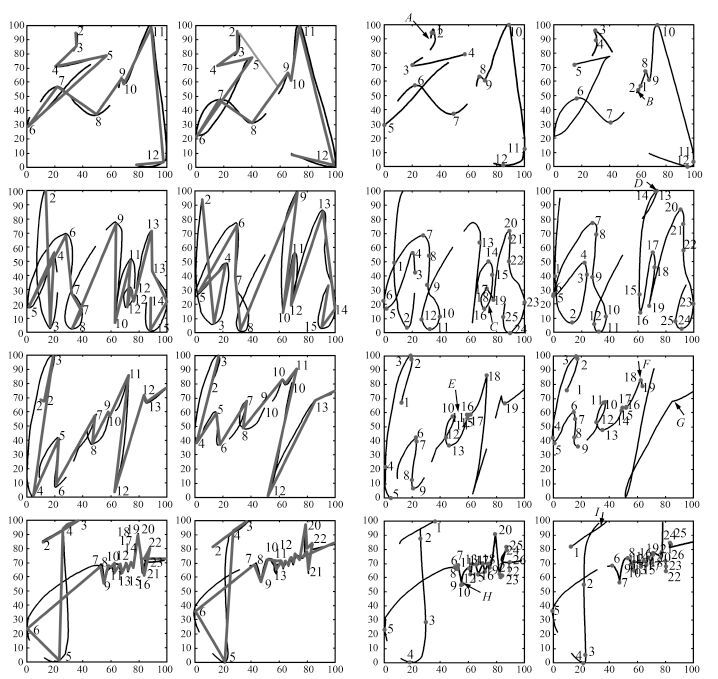
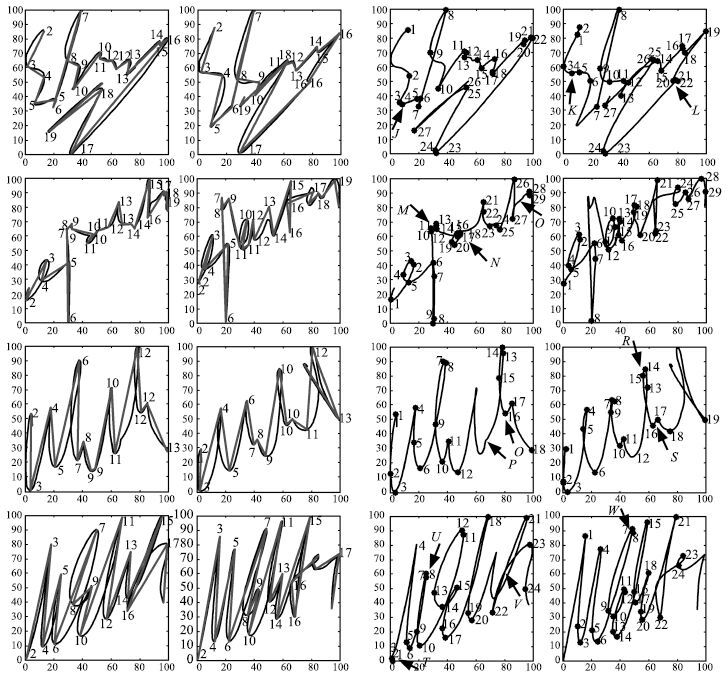
提出一种基于混合特征的非刚性点阵配准算法.该算法包含了对应关系评估与空间变换更新两个相互交替的步骤.首先定义了两个特征描述法用于描述两个点阵之间的全局和局部几何结构特征差异,随后合并这两个特征描述法建立一个基于混合特征的能量优化方程.该能量优化方程可以利用线性分配技术进行求解,同时可以灵活地选择使用最小化全局结构特征差异或最小化局部结构特征差异来评估两个点阵之间的对应关系.为了增强前述两个步骤之间的协调性,我们利用能量权重调节在整个配准过程中控制能量优化从最小化局部结构特征差异逐步转变为最小化全局结构特征差异,同时控制用于空间变换的薄板样条函数(Thin plate spline)的更新从刚性变换逐步转变为非刚性变换.我们在二维轮廓配准、三维轮廓配准、序列图像配准和图像特征点配准下对本文算法进行了各项性能测试,同时也与当前8种流行算法进行了性能比较.本文算法展现了卓越的非刚性配准性能,并在大部分实验中超越了当前的相关算法.
提出一种基于混合特征的非刚性点阵配准算法.该算法包含了对应关系评估与空间变换更新两个相互交替的步骤.首先定义了两个特征描述法用于描述两个点阵之间的全局和局部几何结构特征差异,随后合并这两个特征描述法建立一个基于混合特征的能量优化方程.该能量优化方程可以利用线性分配技术进行求解,同时可以灵活地选择使用最小化全局结构特征差异或最小化局部结构特征差异来评估两个点阵之间的对应关系.为了增强前述两个步骤之间的协调性,我们利用能量权重调节在整个配准过程中控制能量优化从最小化局部结构特征差异逐步转变为最小化全局结构特征差异,同时控制用于空间变换的薄板样条函数(Thin plate spline)的更新从刚性变换逐步转变为非刚性变换.我们在二维轮廓配准、三维轮廓配准、序列图像配准和图像特征点配准下对本文算法进行了各项性能测试,同时也与当前8种流行算法进行了性能比较.本文算法展现了卓越的非刚性配准性能,并在大部分实验中超越了当前的相关算法.

2016, 42(11): 1744-1757.
doi: 10.16383/j.aas.2016.c150563
cstr: 32138.14.j.aas.2016.c150563
摘要:
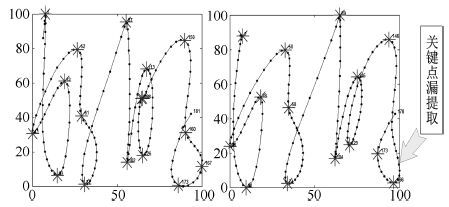
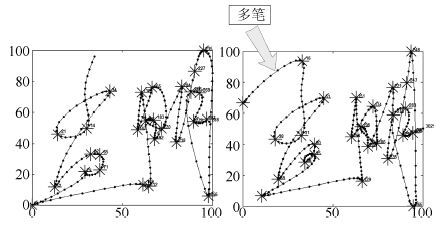
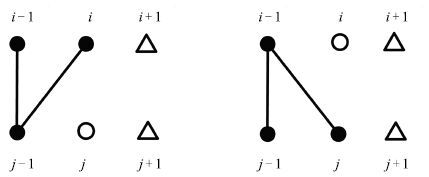
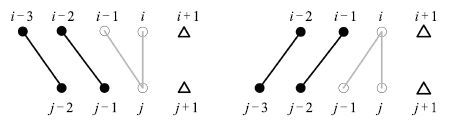
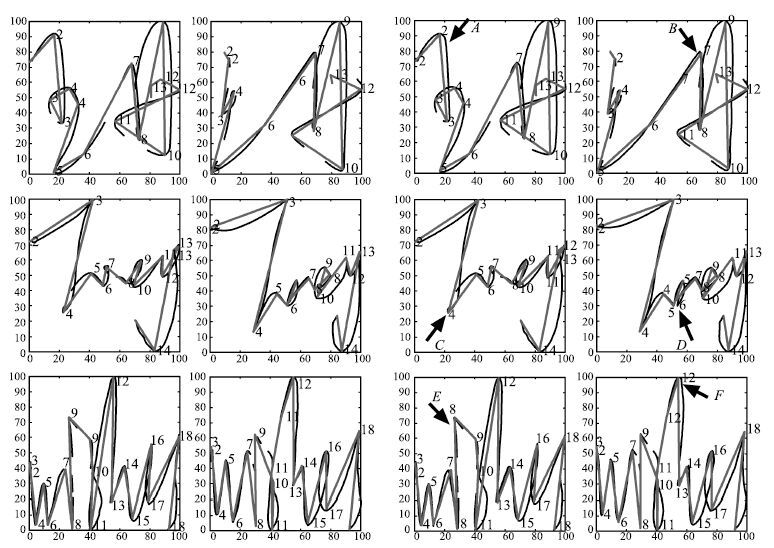
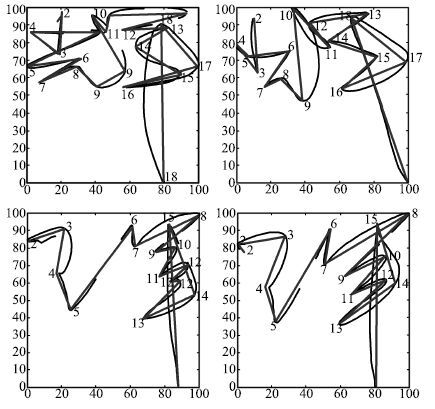
针对现有在线笔迹匹配算法鲁棒性不强的问题,本文提出将合并规则和跳跃规则引入到动态规划的迭代过程,以跳跃规则应对书写中的多、漏笔现象,以合并规则应对因多种书写不一致造成的分割点多提取、漏提取现象.在累计差异矩阵计算中,提出以笔画特征,特别是笔画形状信息来度量笔画间的差异.在SVC2004和SUSIG签名数据库上与现有主要在线笔迹匹配算法进行比较.实验结果表明,本文方法能较好应对多种局部书写和分割的不一致,从而获得更准确、鲁棒的笔画对应关系.
针对现有在线笔迹匹配算法鲁棒性不强的问题,本文提出将合并规则和跳跃规则引入到动态规划的迭代过程,以跳跃规则应对书写中的多、漏笔现象,以合并规则应对因多种书写不一致造成的分割点多提取、漏提取现象.在累计差异矩阵计算中,提出以笔画特征,特别是笔画形状信息来度量笔画间的差异.在SVC2004和SUSIG签名数据库上与现有主要在线笔迹匹配算法进行比较.实验结果表明,本文方法能较好应对多种局部书写和分割的不一致,从而获得更准确、鲁棒的笔画对应关系.
2016, 42(11): 1758-1764.
doi: 10.16383/j.aas.2016.c150707
cstr: 32138.14.j.aas.2016.c150707
摘要:
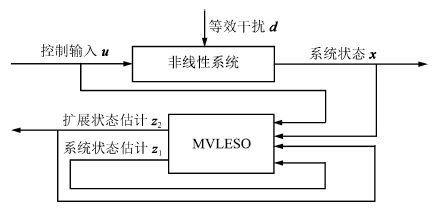
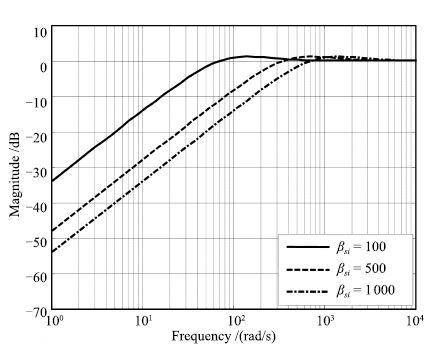
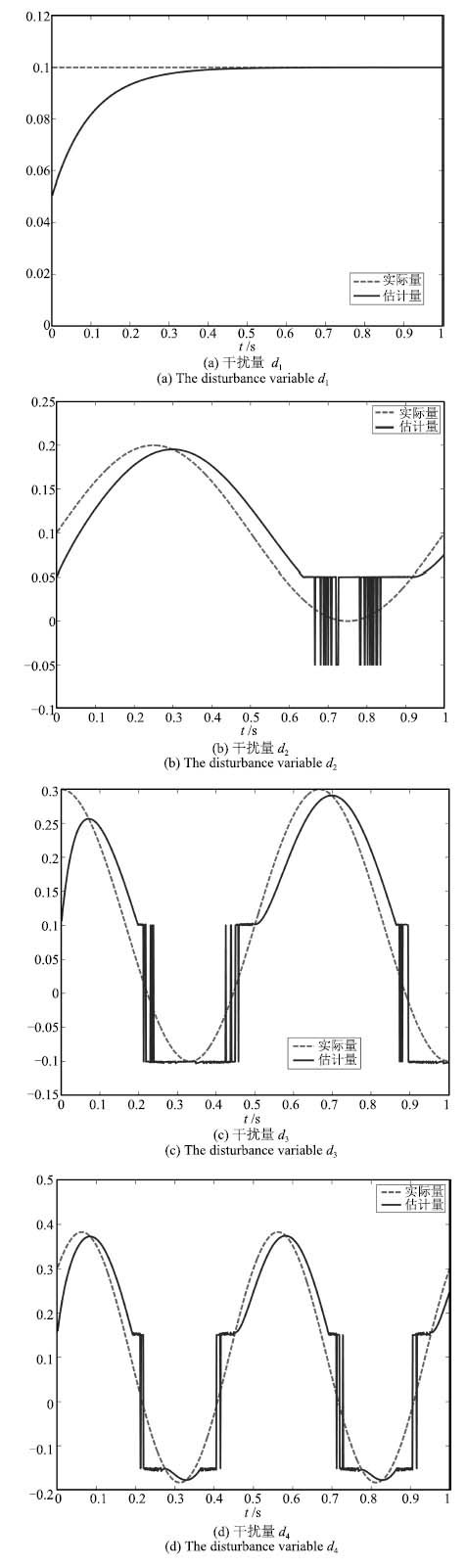
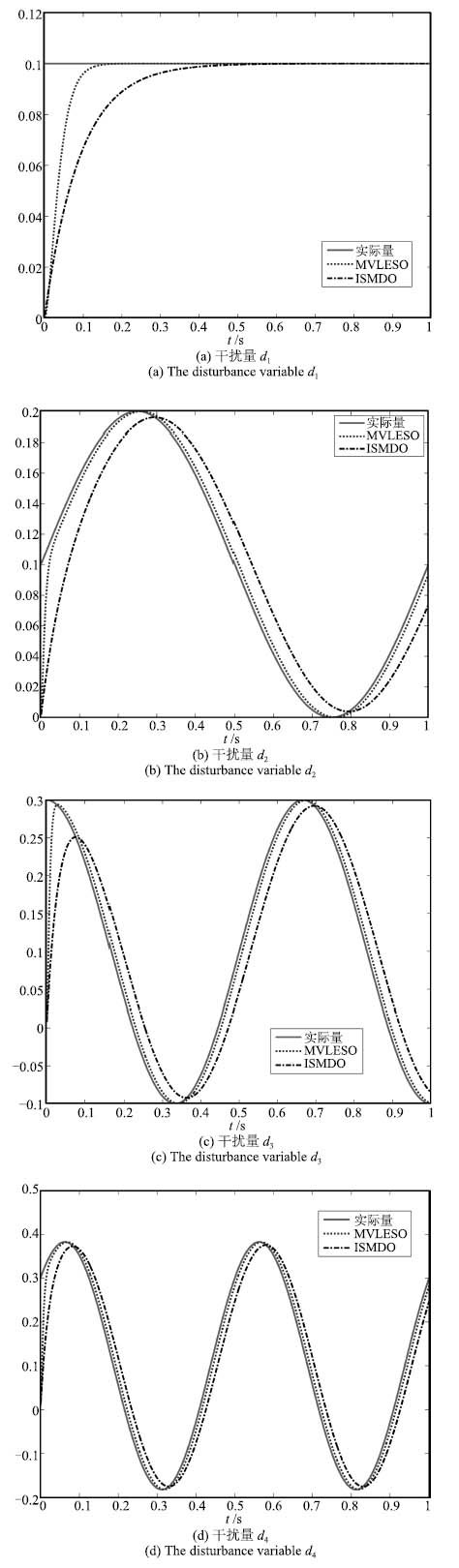
针对一类非线性不确定系统,构造了一种多变量线性扩张状态观测器(Multi-variable linear extended state observer,MVLESO),用于实时估计非线性系统的不确定动态.采用频域分析方法,剖析了所构造的MVLESO在非线性系统不确定动态估计方面的收敛性,并推导出不确定动态的频域估计误差模型.仿真结果表明,所设计的MVLESO可以较为精准地估计出非线性系统当前的不确定动态,该特性为基于MVLESO鲁棒控制方案的有效实施奠定了基础.
针对一类非线性不确定系统,构造了一种多变量线性扩张状态观测器(Multi-variable linear extended state observer,MVLESO),用于实时估计非线性系统的不确定动态.采用频域分析方法,剖析了所构造的MVLESO在非线性系统不确定动态估计方面的收敛性,并推导出不确定动态的频域估计误差模型.仿真结果表明,所设计的MVLESO可以较为精准地估计出非线性系统当前的不确定动态,该特性为基于MVLESO鲁棒控制方案的有效实施奠定了基础.