2016年 第42卷 第10期
2016, 42(10): 1445-1465.
doi: 10.16383/j.aas.2016.c150682
摘要:
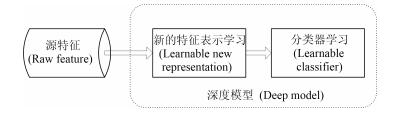
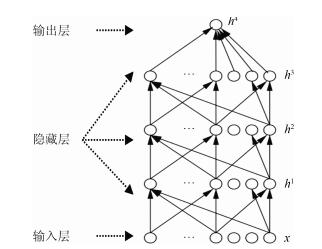
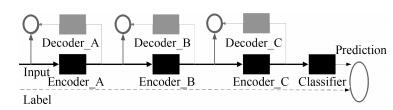
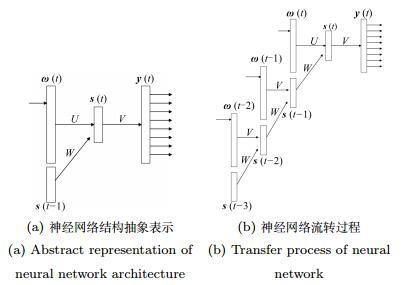
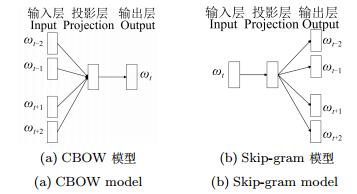
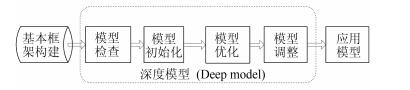
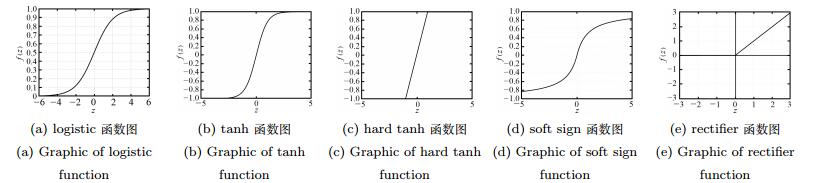
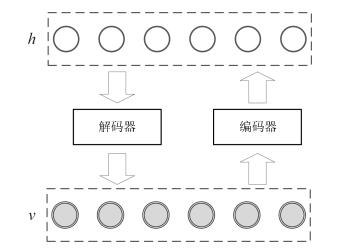
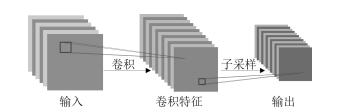
近年来,深度学习在图像和语音处理领域已经取得显著进展,但是在同属人类认知范畴的自然语言处理任务中,研究还未取得重大突破.本文首先从深度学习的应用动机、首要任务及基本框架等角度介绍了深度学习的基本概念;其次,围绕数据表示和学习模型两方面,重点分析讨论了当前面向自然语言处理的深度学习研究进展及其应用策略;并进一步介绍了已有的深度学习平台和工具;最后,对深度学习在自然语言处理领域的发展趋势和有待深入研究的难点进行了展望.
近年来,深度学习在图像和语音处理领域已经取得显著进展,但是在同属人类认知范畴的自然语言处理任务中,研究还未取得重大突破.本文首先从深度学习的应用动机、首要任务及基本框架等角度介绍了深度学习的基本概念;其次,围绕数据表示和学习模型两方面,重点分析讨论了当前面向自然语言处理的深度学习研究进展及其应用策略;并进一步介绍了已有的深度学习平台和工具;最后,对深度学习在自然语言处理领域的发展趋势和有待深入研究的难点进行了展望.


2016, 42(10): 1466-1489.
doi: 10.16383/j.aas.2016.c150823
摘要:
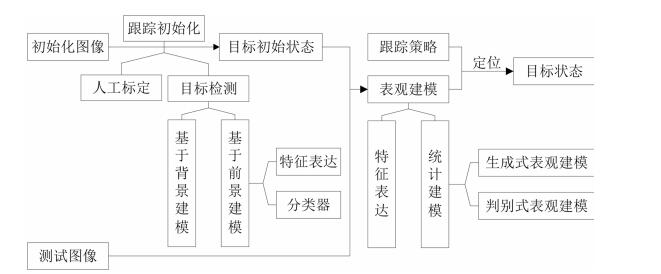
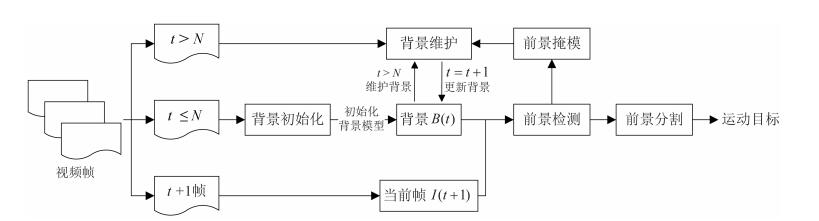
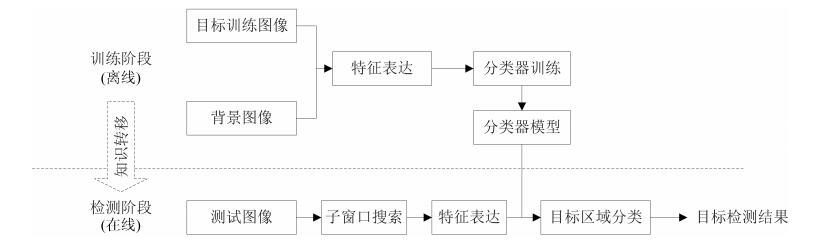
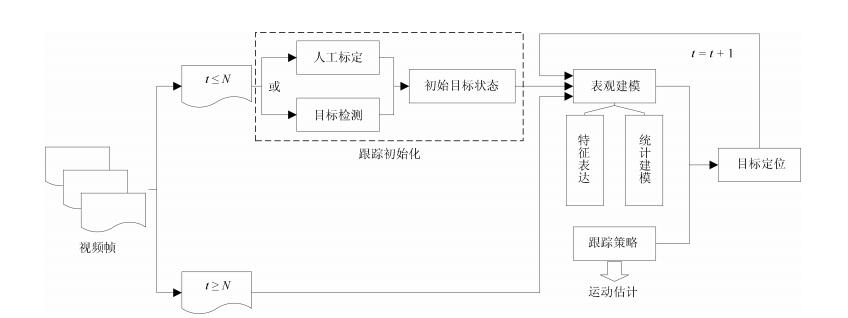
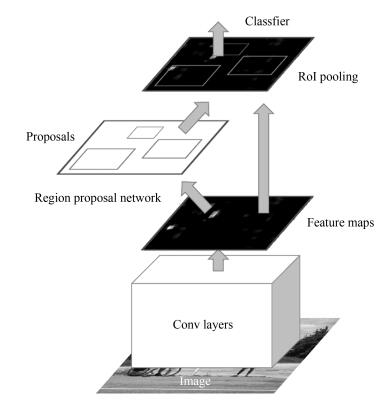
基于视觉的目标检测与跟踪是图像处理、计算机视觉、模式识别等众多学科的交叉研究课题,在视频监控、虚拟现实、人机交互、自主导航等领域,具有重要的理论研究意义和实际应用价值.本文对目标检测与跟踪的发展历史、研究现状以及典型方法给出了较为全面的梳理和总结.首先,根据所处理的数据对象的不同,将目标检测分为基于背景建模和基于前景建模的方法,并分别对背景建模与特征表达方法进行了归纳总结.其次,根据跟踪过程有无目标检测的参与,将跟踪方法分为生成式与判别式,对基于统计的表观建模方法进行了归纳总结.然后,对典型算法的优缺点进行了梳理与分析,并给出了其在标准数据集上的性能对比.最后,总结了该领域待解决的难点问题,对其未来的发展趋势进行了展望.
基于视觉的目标检测与跟踪是图像处理、计算机视觉、模式识别等众多学科的交叉研究课题,在视频监控、虚拟现实、人机交互、自主导航等领域,具有重要的理论研究意义和实际应用价值.本文对目标检测与跟踪的发展历史、研究现状以及典型方法给出了较为全面的梳理和总结.首先,根据所处理的数据对象的不同,将目标检测分为基于背景建模和基于前景建模的方法,并分别对背景建模与特征表达方法进行了归纳总结.其次,根据跟踪过程有无目标检测的参与,将跟踪方法分为生成式与判别式,对基于统计的表观建模方法进行了归纳总结.然后,对典型算法的优缺点进行了梳理与分析,并给出了其在标准数据集上的性能对比.最后,总结了该领域待解决的难点问题,对其未来的发展趋势进行了展望.

2016, 42(10): 1490-1500.
doi: 10.16383/j.aas.2016.c160604
摘要:
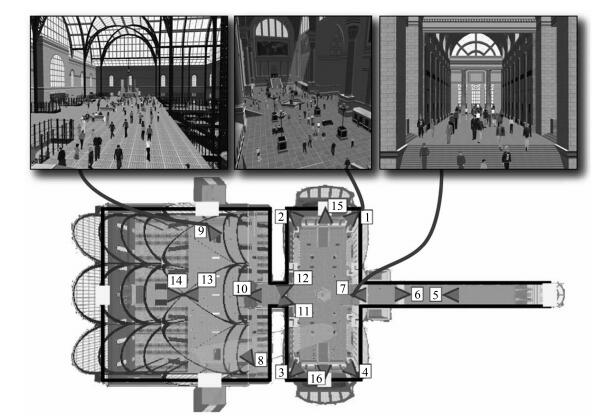
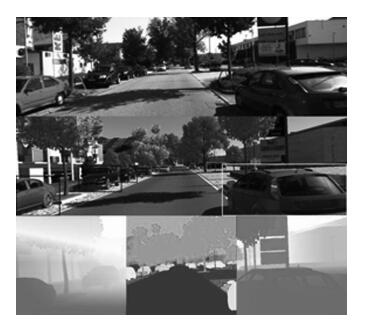
在视觉计算研究中,对复杂环境的适应能力通常决定了算法能否实际应用,已经成为该领域的研究焦点之一.由人工社会(Artificial societies)、计算实验(Computational experiments)、平行执行(Parallel execution)构成的ACP理论在复杂系统建模与调控中发挥着重要作用.本文将ACP理论引入智能视觉计算领域,提出平行视觉的基本框架与关键技术.平行视觉利用人工场景来模拟和表示复杂挑战的实际场景,通过计算实验进行各种视觉模型的训练与评估,最后借助平行执行来在线优化视觉系统,实现对复杂环境的智能感知与理解.这一虚实互动的视觉计算方法结合了计算机图形学、虚拟现实、机器学习、知识自动化等技术,是视觉系统走向应用的有效途径和自然选择.
在视觉计算研究中,对复杂环境的适应能力通常决定了算法能否实际应用,已经成为该领域的研究焦点之一.由人工社会(Artificial societies)、计算实验(Computational experiments)、平行执行(Parallel execution)构成的ACP理论在复杂系统建模与调控中发挥着重要作用.本文将ACP理论引入智能视觉计算领域,提出平行视觉的基本框架与关键技术.平行视觉利用人工场景来模拟和表示复杂挑战的实际场景,通过计算实验进行各种视觉模型的训练与评估,最后借助平行执行来在线优化视觉系统,实现对复杂环境的智能感知与理解.这一虚实互动的视觉计算方法结合了计算机图形学、虚拟现实、机器学习、知识自动化等技术,是视觉系统走向应用的有效途径和自然选择.




2016, 42(10): 1501-1511.
doi: 10.16383/j.aas.2016.c150556
摘要:
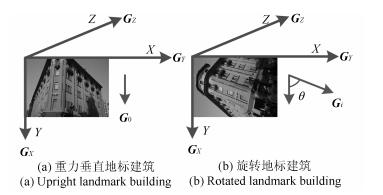
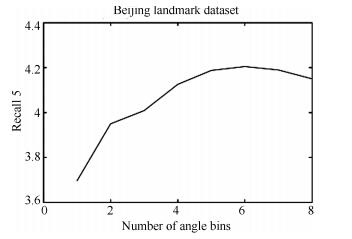
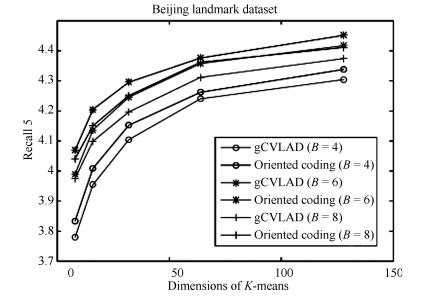
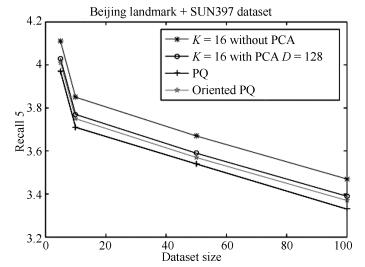
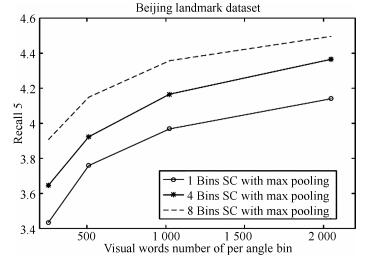
海量图像检索算法的核心问题是如何对特征进行有效的编码以及快速的检索.局部集聚向量描述(Vector of locally aggregated descriptors,VLAD)算法因其精确的编码方式以及较低的特征维度,取得了良好的检索性能.然而VLAD算法在编码过程中并没有考虑到局部特征的角度信息,VLAD编码向量维度依然较高,无法支持实时的海量图像检索.本文提出一种在VLAD编码框架中融合重力信息的角度编码方法以及适用于海量图像的角度乘积量化快速检索方法.在特征编码阶段,利用前端移动设备采集的重力信息实现融合特征角度的特征编码方法.在最近邻检索阶段将角度分区与乘积量化子分区相结合,采用改进的角度乘积量化进行快速近似最近邻检索.另外本文提出的基于角度编码的图像检索算法可适用于主流的词袋模型及其变种算法等框架.在GPS及重力信息标注的北京地标建筑(Beijing landmark)数据库、Holidays数据库以及SUN397数据库中进行测试,实验结果表明本文算法能够充分利用匹配特征在描述符以及几何空间的相似性,相比传统的VLAD以及协变局部集聚向量描述符(Covariant vector of locally aggregated descriptors,CVLAD)算法精度有明显提升.
海量图像检索算法的核心问题是如何对特征进行有效的编码以及快速的检索.局部集聚向量描述(Vector of locally aggregated descriptors,VLAD)算法因其精确的编码方式以及较低的特征维度,取得了良好的检索性能.然而VLAD算法在编码过程中并没有考虑到局部特征的角度信息,VLAD编码向量维度依然较高,无法支持实时的海量图像检索.本文提出一种在VLAD编码框架中融合重力信息的角度编码方法以及适用于海量图像的角度乘积量化快速检索方法.在特征编码阶段,利用前端移动设备采集的重力信息实现融合特征角度的特征编码方法.在最近邻检索阶段将角度分区与乘积量化子分区相结合,采用改进的角度乘积量化进行快速近似最近邻检索.另外本文提出的基于角度编码的图像检索算法可适用于主流的词袋模型及其变种算法等框架.在GPS及重力信息标注的北京地标建筑(Beijing landmark)数据库、Holidays数据库以及SUN397数据库中进行测试,实验结果表明本文算法能够充分利用匹配特征在描述符以及几何空间的相似性,相比传统的VLAD以及协变局部集聚向量描述符(Covariant vector of locally aggregated descriptors,CVLAD)算法精度有明显提升.





2016, 42(10): 1512-1519.
doi: 10.16383/j.aas.2016.c150801
摘要:
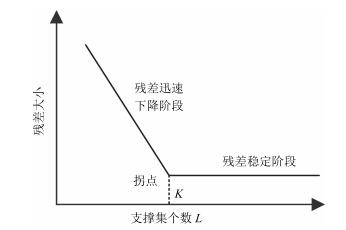
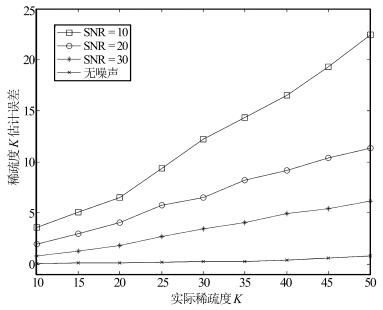
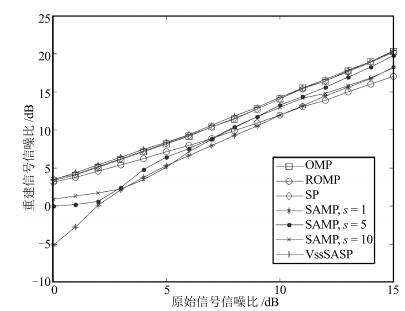
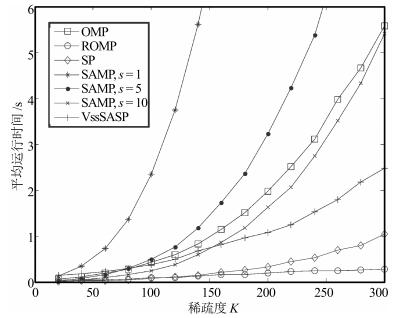
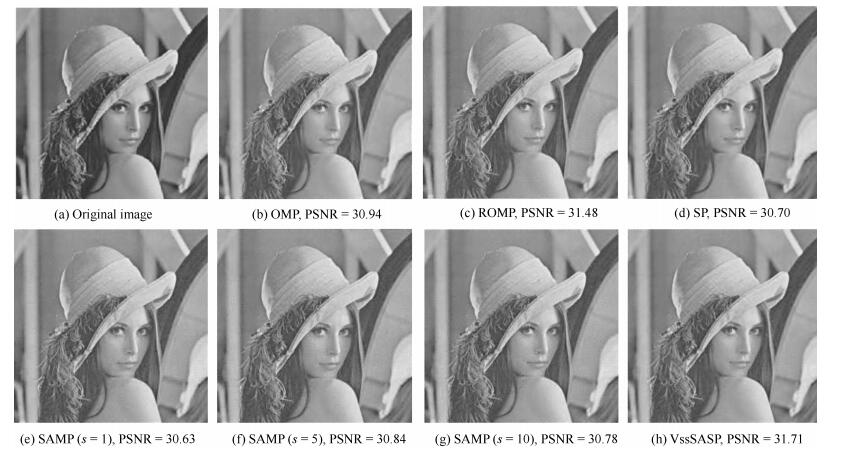
针对压缩感知(Compressive sensing,CS)中未知稀疏度信号的重建问题,本文提出一种变步长稀疏度自适应子空间追踪算法.首先,采用一种匹配测试的方法确定固定步长,然后以该固定步长与变步长方式相结合,通过不同支撑集原子个数下的重建残差变化确定信号稀疏度,算法采用子空间追踪方法确定相应支撑集原子,并完成原始信号准确重建.实验结果表明,与同类算法相比,该算法可以更准确重建原始信号,且信号稀疏度值较高时,运算量低于同类算法.
针对压缩感知(Compressive sensing,CS)中未知稀疏度信号的重建问题,本文提出一种变步长稀疏度自适应子空间追踪算法.首先,采用一种匹配测试的方法确定固定步长,然后以该固定步长与变步长方式相结合,通过不同支撑集原子个数下的重建残差变化确定信号稀疏度,算法采用子空间追踪方法确定相应支撑集原子,并完成原始信号准确重建.实验结果表明,与同类算法相比,该算法可以更准确重建原始信号,且信号稀疏度值较高时,运算量低于同类算法.

2016, 42(10): 1520-1531.
doi: 10.16383/j.aas.2016.c150261
摘要:
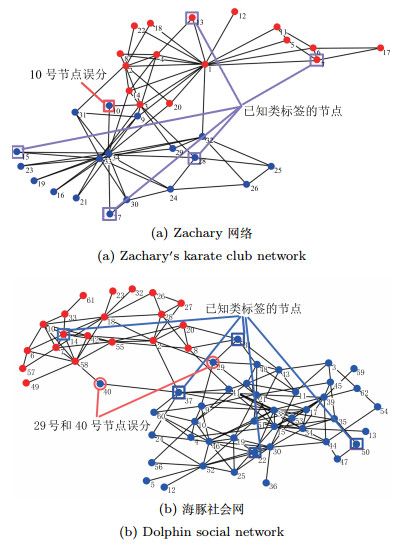
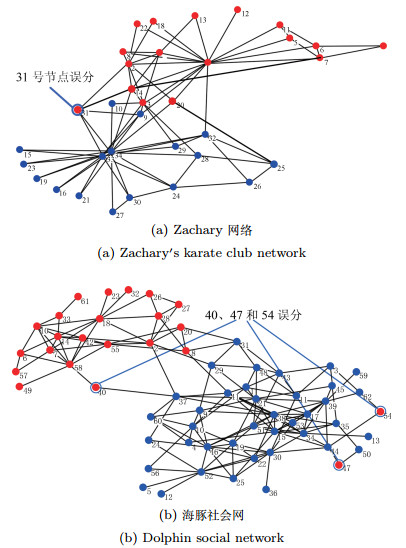
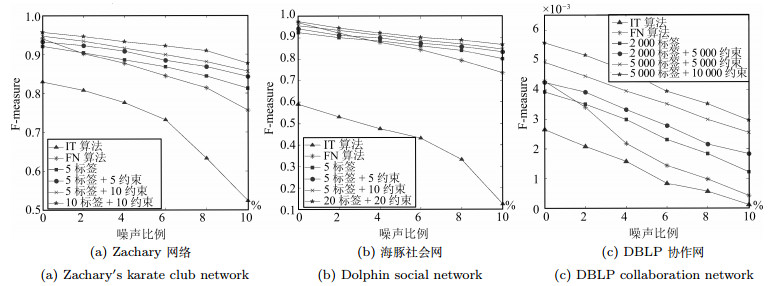
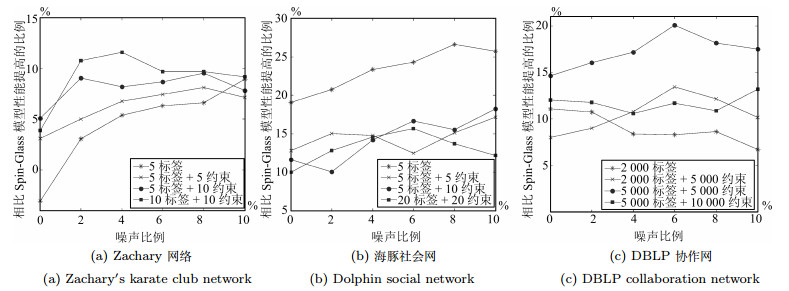
社区发现是社交网络分析中一个重要的研究方向.当前大部分的研究都聚焦在自动社区发现问题,但是在具有数据缺失或噪声的网络中,自动社区发现算法的性能会随着噪声数据的增加而迅速下降.通过在社区发现中融合先验信息,进行半监督的社区发现,有望为解决上述挑战提供一条可行的途径.本文基于因子图模型,通过融入先验信息到一个统一的概率框架中,提出了一种基于因子图模型的半监督社区发现方法,研究具有用户引导情况下的社交网络社区发现问题.在三个真实的社交网络数据(Zachary社会关系网、海豚社会网和DBLP协作网)上进行实验,证明通过融入先验信息可以有效地提高社区发现的精度,且将我们的方法与一种最新的半监督社区发现方法(半监督Spin-Glass模型)进行对比,在三个数据集中F-measure平均提升了6.34%、16.36%和12.13%.
社区发现是社交网络分析中一个重要的研究方向.当前大部分的研究都聚焦在自动社区发现问题,但是在具有数据缺失或噪声的网络中,自动社区发现算法的性能会随着噪声数据的增加而迅速下降.通过在社区发现中融合先验信息,进行半监督的社区发现,有望为解决上述挑战提供一条可行的途径.本文基于因子图模型,通过融入先验信息到一个统一的概率框架中,提出了一种基于因子图模型的半监督社区发现方法,研究具有用户引导情况下的社交网络社区发现问题.在三个真实的社交网络数据(Zachary社会关系网、海豚社会网和DBLP协作网)上进行实验,证明通过融入先验信息可以有效地提高社区发现的精度,且将我们的方法与一种最新的半监督社区发现方法(半监督Spin-Glass模型)进行对比,在三个数据集中F-measure平均提升了6.34%、16.36%和12.13%.



2016, 42(10): 1532-1541.
doi: 10.16383/j.aas.2016.c150459
摘要:
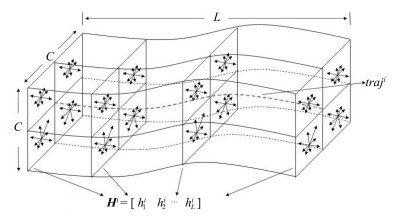
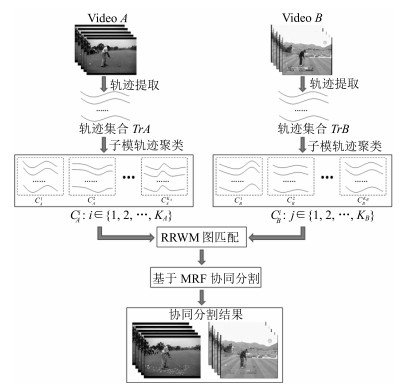
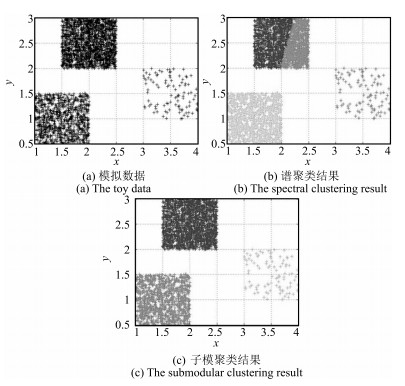
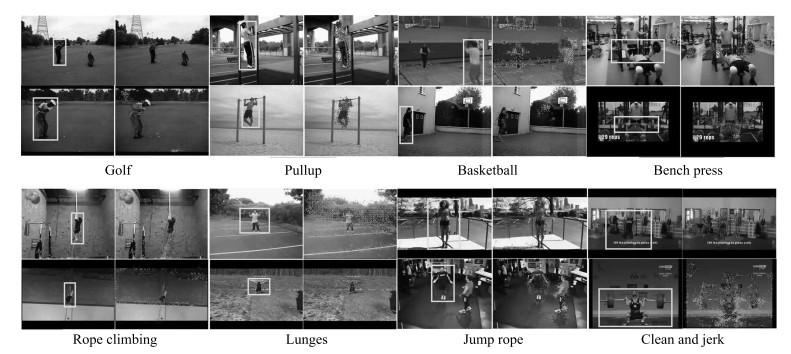
成对视频共同运动模式的协同分割指的是同时检测出两个相关视频中共有的行为模式,是计算机视觉研究的一个热点.本文提出了一种新的成对视频协同分割方法.首先,利用稠密轨迹方法对视频运动部分进行检测,并对运动轨迹进行特征表示;然后,引入子模优化方法对单视频内的运动轨迹进行聚类分析;接着采用基于重加权随机游走的图匹配方法对成对视频运动轨迹进行匹配,该方法对出格点、变形和噪声都具有很强的鲁棒性;同时根据图匹配结果实现运动轨迹的共显著性度量;最后,将所有轨迹分类成共同运动轨迹和异常运动轨迹的问题转化为基于图割的马尔科夫随机场的二值化标签问题.通过典型运动视频数据集的比较实验,其结果验证了本文方法的有效性.
成对视频共同运动模式的协同分割指的是同时检测出两个相关视频中共有的行为模式,是计算机视觉研究的一个热点.本文提出了一种新的成对视频协同分割方法.首先,利用稠密轨迹方法对视频运动部分进行检测,并对运动轨迹进行特征表示;然后,引入子模优化方法对单视频内的运动轨迹进行聚类分析;接着采用基于重加权随机游走的图匹配方法对成对视频运动轨迹进行匹配,该方法对出格点、变形和噪声都具有很强的鲁棒性;同时根据图匹配结果实现运动轨迹的共显著性度量;最后,将所有轨迹分类成共同运动轨迹和异常运动轨迹的问题转化为基于图割的马尔科夫随机场的二值化标签问题.通过典型运动视频数据集的比较实验,其结果验证了本文方法的有效性.


2016, 42(10): 1542-1551.
doi: 10.16383/j.aas.2016.c150808
摘要:
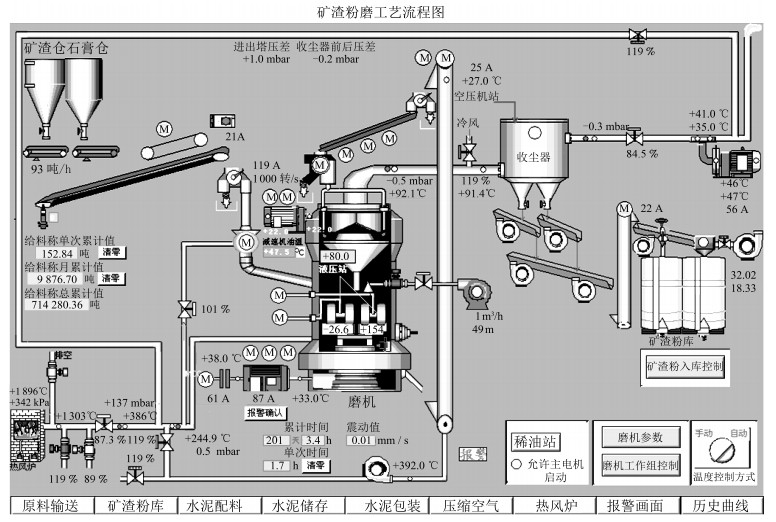
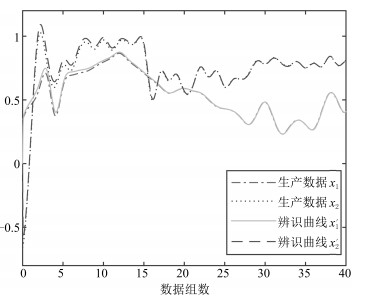
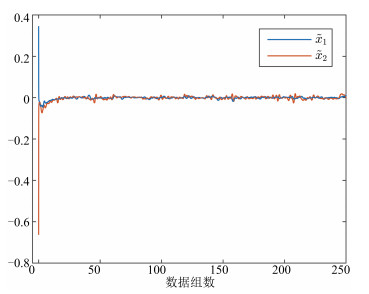
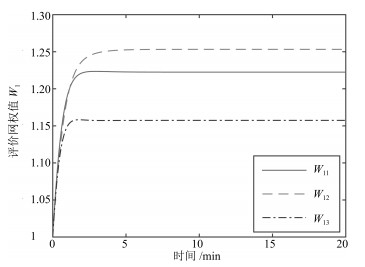
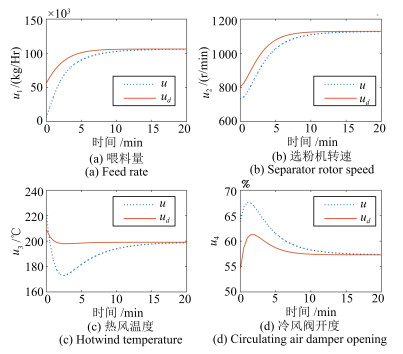
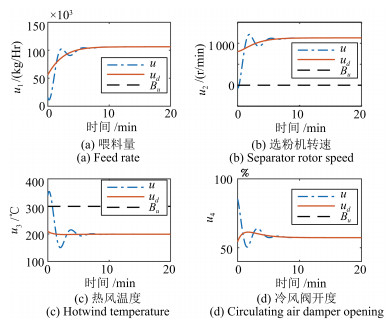
矿渣微粉是一种新型绿色环保型建材,可以大大提高水泥混凝土的力学性能.本文以矿渣微粉生产过程为研究对象,针对该过程难以通过机理建模进行辨识和控制的特点,利用数据驱动的思想,建立矿渣微粉生产过程的递归神经网络模型.在此基础上,利用自适应动态规划,设计具有控制约束的跟踪控制器,并将其应用到矿渣微粉生产过程中.仿真分析表明,建立的数据驱动模型能够有效地辨识矿渣微粉生产过程,同时,本文提出的控制方法能够实现输入受限的微粉比表面积及磨内压差的最优跟踪控制.
矿渣微粉是一种新型绿色环保型建材,可以大大提高水泥混凝土的力学性能.本文以矿渣微粉生产过程为研究对象,针对该过程难以通过机理建模进行辨识和控制的特点,利用数据驱动的思想,建立矿渣微粉生产过程的递归神经网络模型.在此基础上,利用自适应动态规划,设计具有控制约束的跟踪控制器,并将其应用到矿渣微粉生产过程中.仿真分析表明,建立的数据驱动模型能够有效地辨识矿渣微粉生产过程,同时,本文提出的控制方法能够实现输入受限的微粉比表面积及磨内压差的最优跟踪控制.




2016, 42(10): 1552-1561.
doi: 10.16383/j.aas.2016.c150774
摘要:
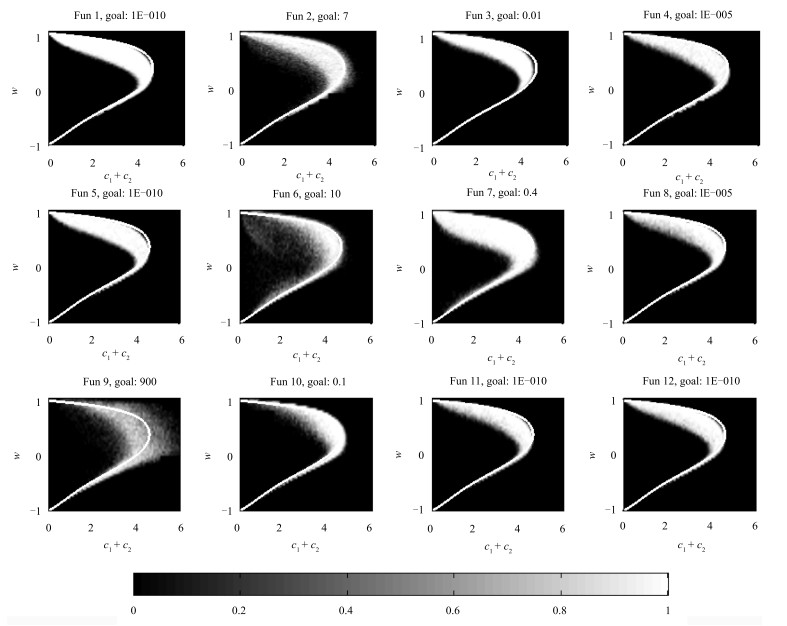
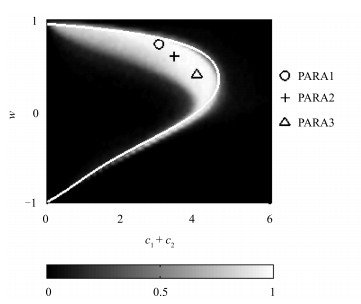
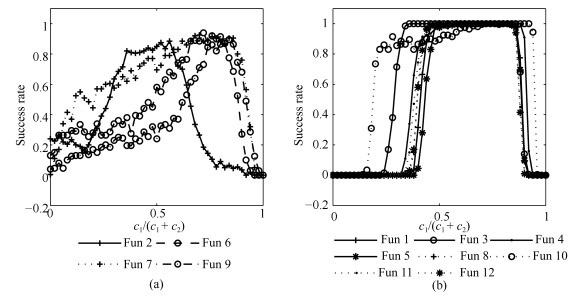
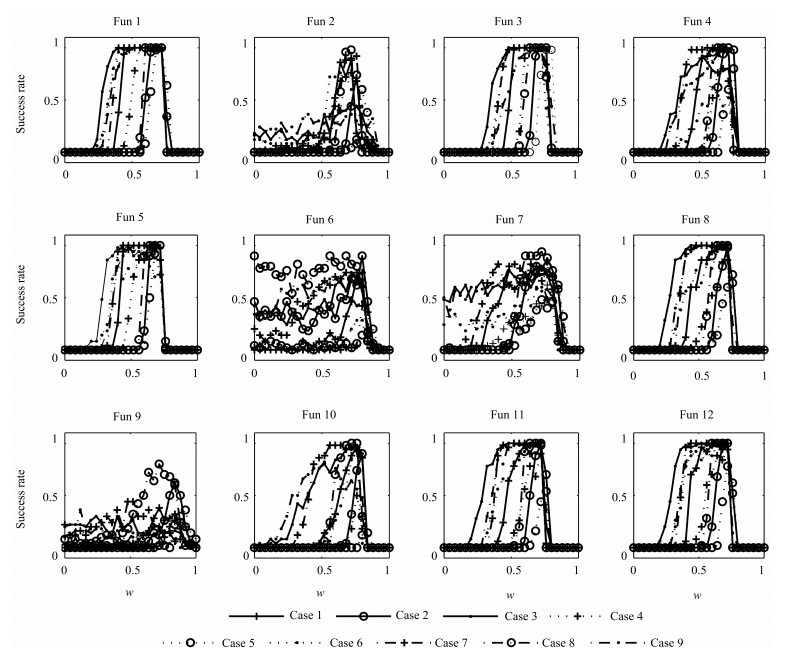
惯性权重和加速因子是影响粒子群算法优化性能的重要参数.基于常用的12个测试函数,本文通过实验研究了不同参数组合下粒子的探索能力和算法的优化性能,在此基础上推荐了一组固定的参数组合.通过惯性权重和加速因子的不同变化策略组合对算法性能影响的实验分析,推荐了一种变化的参数设置方法.基于CEC2015发布的15个基准函数进一步验证了本文推荐的参数选取方法的有效性.最后讨论了粒子群优化(Particle swarm optimization,PSO)算法在连续优化和离散优化方面的应用问题.
惯性权重和加速因子是影响粒子群算法优化性能的重要参数.基于常用的12个测试函数,本文通过实验研究了不同参数组合下粒子的探索能力和算法的优化性能,在此基础上推荐了一组固定的参数组合.通过惯性权重和加速因子的不同变化策略组合对算法性能影响的实验分析,推荐了一种变化的参数设置方法.基于CEC2015发布的15个基准函数进一步验证了本文推荐的参数选取方法的有效性.最后讨论了粒子群优化(Particle swarm optimization,PSO)算法在连续优化和离散优化方面的应用问题.


2016, 42(10): 1562-1569.
doi: 10.16383/j.aas.2016.c150828
摘要:
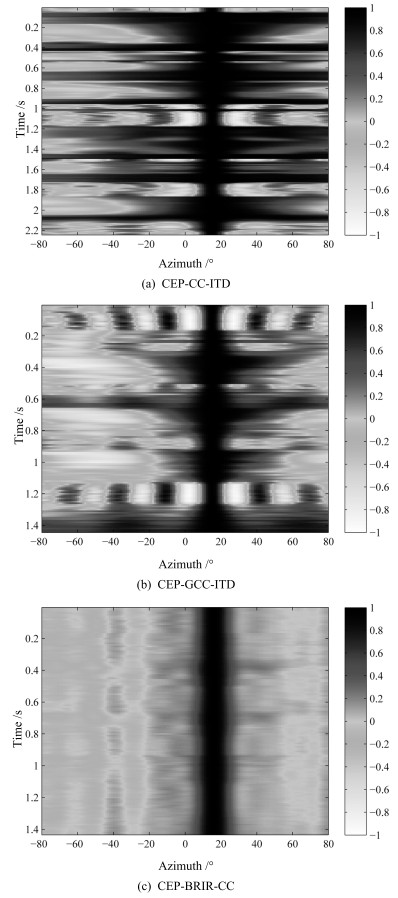
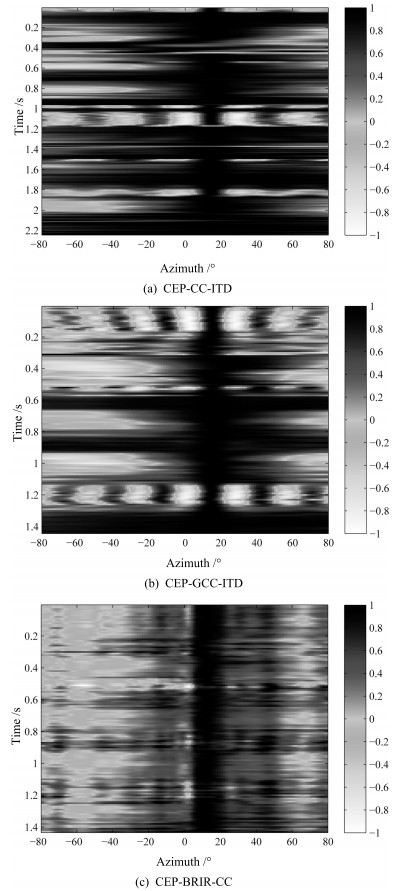
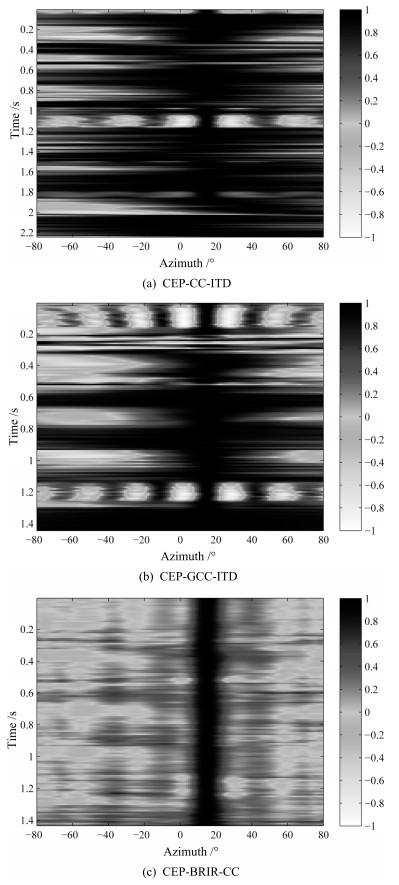
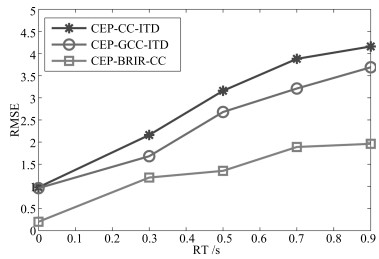
在实际封闭环境中,针对存在混响而导致声源定位性能下降的问题,提出一种基于倒谱双耳房间脉冲响应(Binaural room impulse response,BRIR)的双耳互相关声源定位方法.该方法通过从倒谱BRIR中减去混响分量,然后反变换到时域得到估计的脉冲响应,再与数据库中的头部脉冲响应(Head related impulse response,HRIR)进行互相关运算,最大互相关值相对应的位置就是所估计的声源位置.仿真实验结果表明,提出的算法能减少混响环境中带来的定位误差,提高声源定位的精度.
在实际封闭环境中,针对存在混响而导致声源定位性能下降的问题,提出一种基于倒谱双耳房间脉冲响应(Binaural room impulse response,BRIR)的双耳互相关声源定位方法.该方法通过从倒谱BRIR中减去混响分量,然后反变换到时域得到估计的脉冲响应,再与数据库中的头部脉冲响应(Head related impulse response,HRIR)进行互相关运算,最大互相关值相对应的位置就是所估计的声源位置.仿真实验结果表明,提出的算法能减少混响环境中带来的定位误差,提高声源定位的精度.



2016, 42(10): 1570-1584.
doi: 10.16383/j.aas.2016.c150702
摘要:
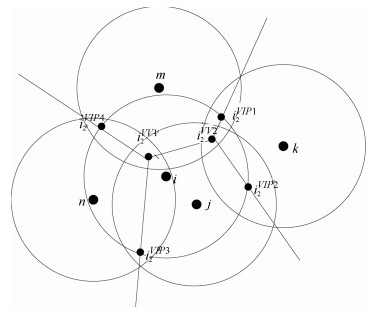
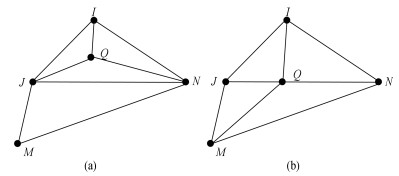
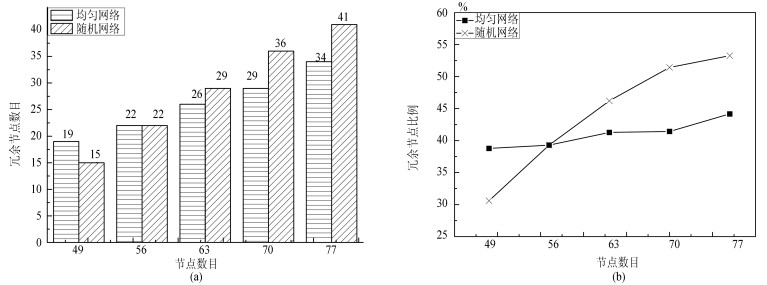
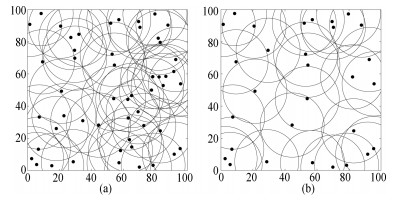
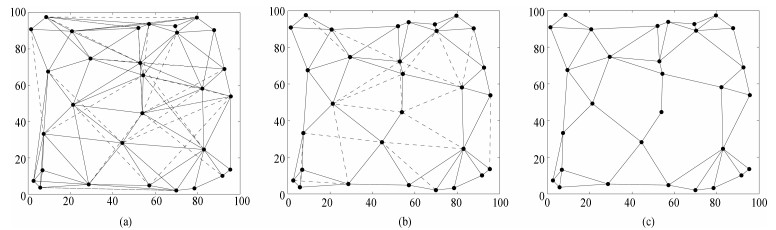
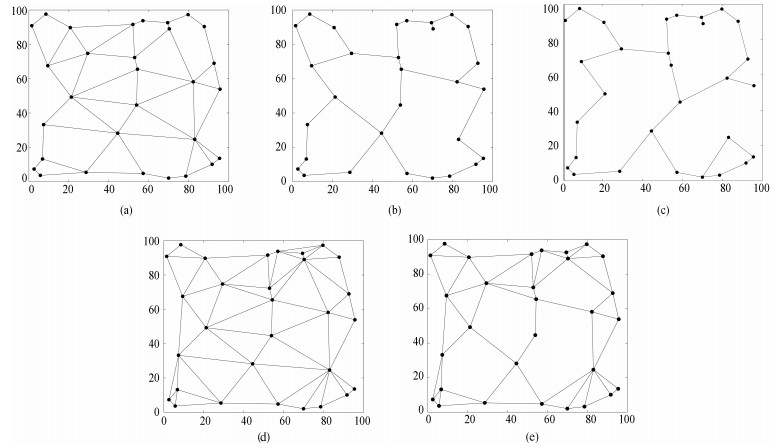
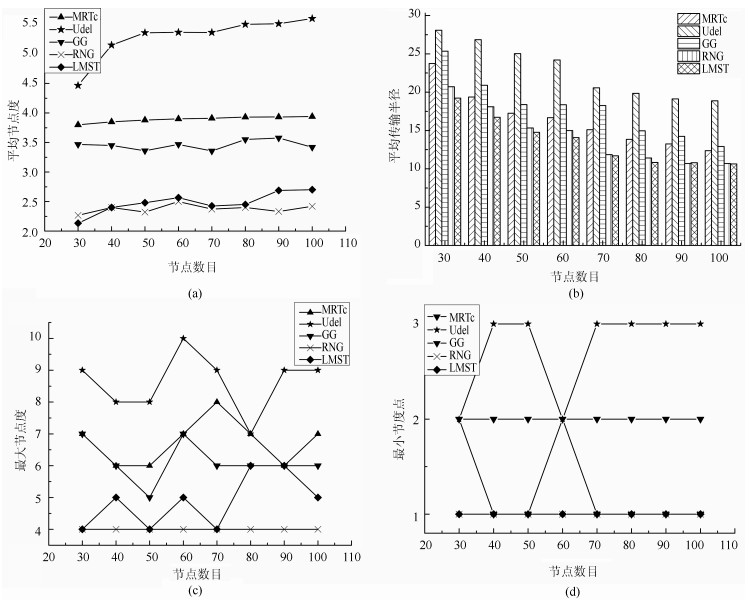
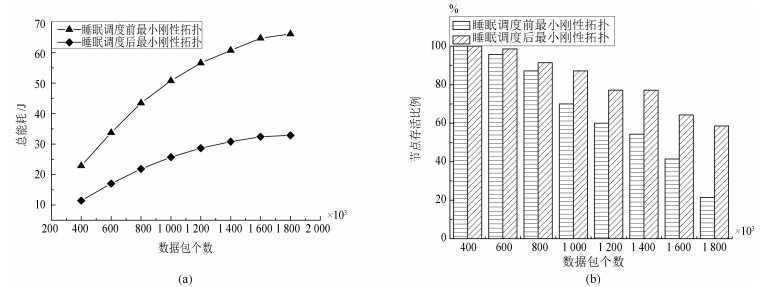
为同时满足覆盖与节能应用需求,本文提出了无线传感器网络中一种最小刚性拓扑控制算法MRTc(Minimal rigid topology control algorithm based on Voronoi coverage and Delaunay triangulation).该算法基于Voronoi覆盖机制,准确控制节点工作状态,实现活动节点对目标区域的完全覆盖.在此基础上,MRTc利用Delaunay三角剖分图的特点,构建出适用于无线传感器网络的最小刚性拓扑结构.该结构有效约束了网络平均节点度,且同时具有容错性、覆盖性和稀疏性.此外,MRTc引入节点功率控制策略,在维持网络完全覆盖的基础上最小化节点能耗.仿真结果进一步验证了本文提出的MRTc算法的有效性.
为同时满足覆盖与节能应用需求,本文提出了无线传感器网络中一种最小刚性拓扑控制算法MRTc(Minimal rigid topology control algorithm based on Voronoi coverage and Delaunay triangulation).该算法基于Voronoi覆盖机制,准确控制节点工作状态,实现活动节点对目标区域的完全覆盖.在此基础上,MRTc利用Delaunay三角剖分图的特点,构建出适用于无线传感器网络的最小刚性拓扑结构.该结构有效约束了网络平均节点度,且同时具有容错性、覆盖性和稀疏性.此外,MRTc引入节点功率控制策略,在维持网络完全覆盖的基础上最小化节点能耗.仿真结果进一步验证了本文提出的MRTc算法的有效性.




2016, 42(10): 1585-1594.
doi: 10.16383/j.aas.2016.c150891
摘要:
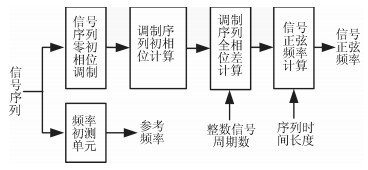
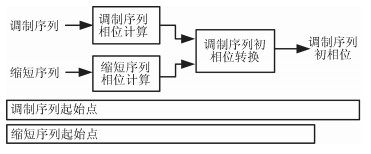
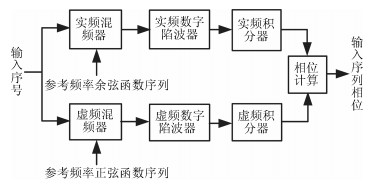
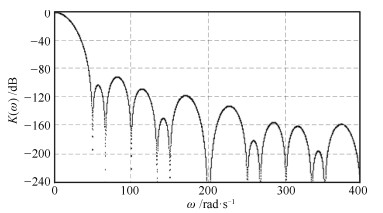
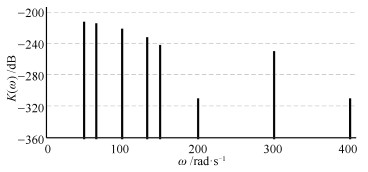
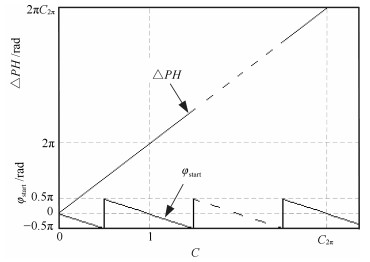
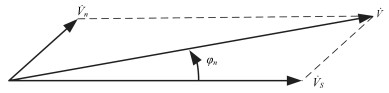
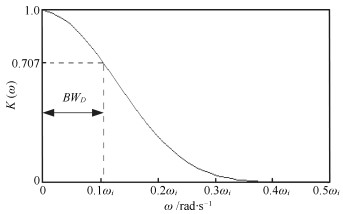
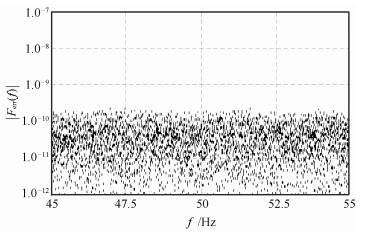
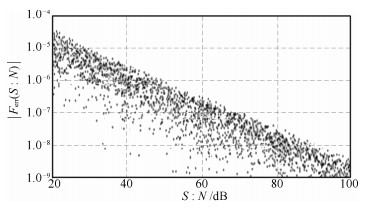
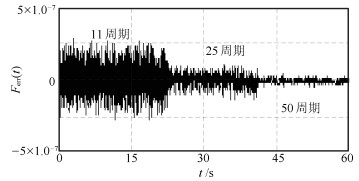
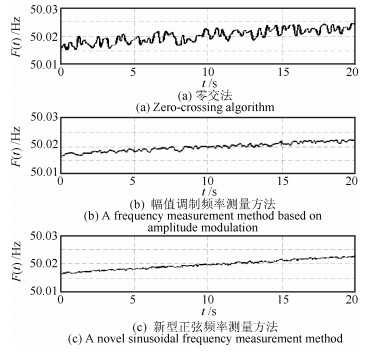
高准确度的正弦信号频率测量技术有广泛的应用,如应用于系统信号的同步处理,系统的谐波和系统的阻抗测量.但在低频正弦信号频率测量方面,现有的频率测量方法普遍存在准确度不高和抗谐波噪声干扰性不强等问题.文中提出了一种主要由序列零初相位调制等方法构成的新型正弦信号频率测量方法,分析了序列零初相位调制的原理.新方法避开了输入序列任意初相位的影响,同时调制序列携带了数值较大的信号序列全相位差信息,可实现准确度较高的低频正弦信号频率测量,此外新方法还具有较强的抗谐波噪声干扰特性,将新方法具体应用于电力系统正弦频率的测量,显示出明显的优越性.通过数学计算、仿真实验及物理实验结果验证了新型正弦信号频率测量方法的正确性和可靠性.
高准确度的正弦信号频率测量技术有广泛的应用,如应用于系统信号的同步处理,系统的谐波和系统的阻抗测量.但在低频正弦信号频率测量方面,现有的频率测量方法普遍存在准确度不高和抗谐波噪声干扰性不强等问题.文中提出了一种主要由序列零初相位调制等方法构成的新型正弦信号频率测量方法,分析了序列零初相位调制的原理.新方法避开了输入序列任意初相位的影响,同时调制序列携带了数值较大的信号序列全相位差信息,可实现准确度较高的低频正弦信号频率测量,此外新方法还具有较强的抗谐波噪声干扰特性,将新方法具体应用于电力系统正弦频率的测量,显示出明显的优越性.通过数学计算、仿真实验及物理实验结果验证了新型正弦信号频率测量方法的正确性和可靠性.

2016, 42(10): 1595-1604.
doi: 10.16383/j.aas.2016.e110097
摘要:
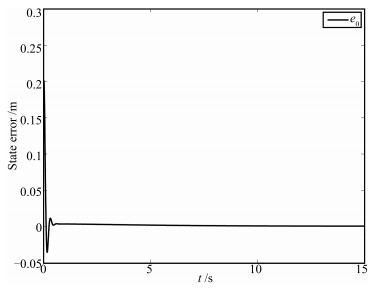
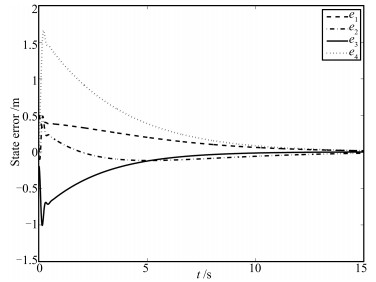
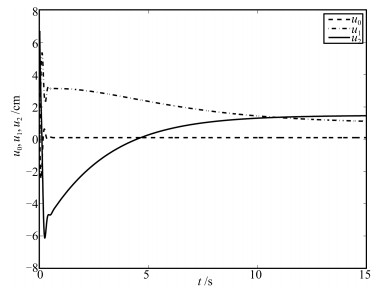
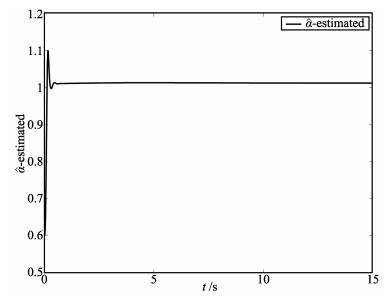
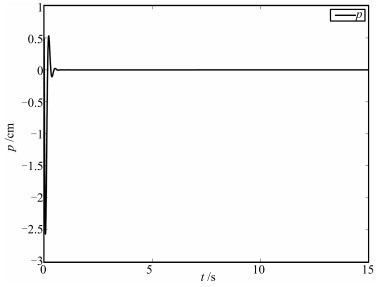
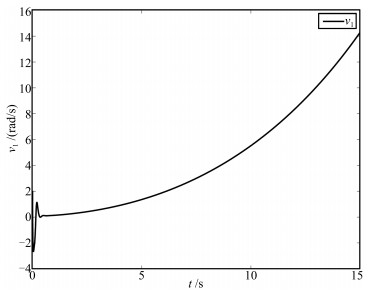
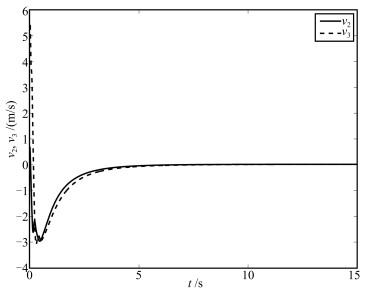
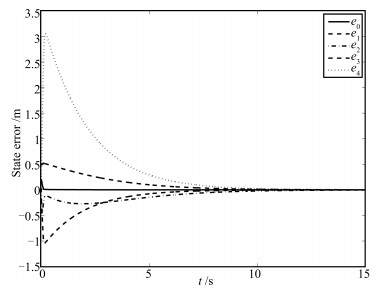
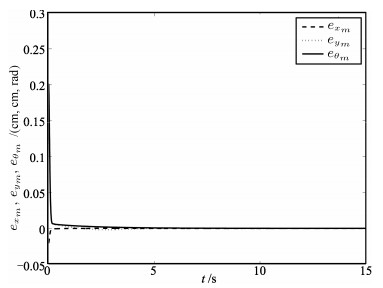
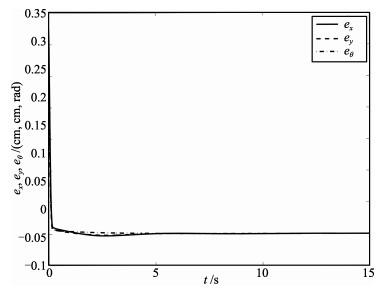
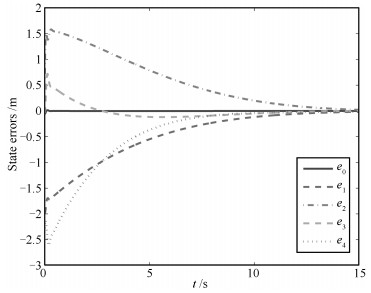
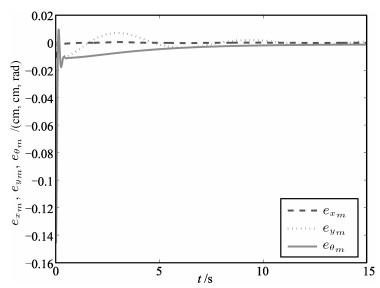
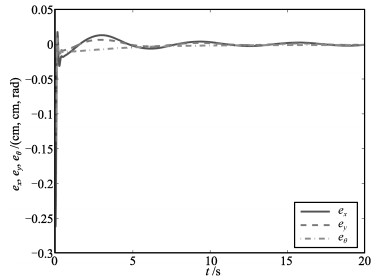
The tracking problem of nonholonomic mobile robots with uncertainties is investigated in this paper.An uncertain model of the nonholonomic kinematic system is presented based on the visual feedback and the state and input transformations for a kind of mobile robots in chained form with uncertainties.Two transformations are exploited based on the idea of backstepping and the structure of tracking error system.Then, both an adaptive control law and a dynamic feedback robust controller are designed to track the desired trajectory by using Lyapunov direct method and the extended Barbalat Lemma.The asymptotic convergence of a closed-loop error system is proved rigorously.Finally, simulation results demonstrate the effectiveness of the proposed strategies.
The tracking problem of nonholonomic mobile robots with uncertainties is investigated in this paper.An uncertain model of the nonholonomic kinematic system is presented based on the visual feedback and the state and input transformations for a kind of mobile robots in chained form with uncertainties.Two transformations are exploited based on the idea of backstepping and the structure of tracking error system.Then, both an adaptive control law and a dynamic feedback robust controller are designed to track the desired trajectory by using Lyapunov direct method and the extended Barbalat Lemma.The asymptotic convergence of a closed-loop error system is proved rigorously.Finally, simulation results demonstrate the effectiveness of the proposed strategies.