2016年 第42卷 第12期
2016, 42(12): 1765-1779.
doi: 10.16383/j.aas.2016.y000006
摘要:
我国正面临日益严重的老龄化问题和数量庞大的残疾人群,康复机器人与智能辅助系统的研究开发和应用有望为解决养老、失能辅助和康复问题提供部分技术手段.康复机器人与智能辅助系统涉及医学、信息、机械、电子、材料、力学等多个学科领域,其研究与开发也面临诸多挑战和困难,本文从“康复机器人及多种康复训练模式”、“智能辅助系统与生机电技术”、“康复与辅助相关的多模态传感与控制方法”、“外骨骼和可穿戴系统、智能假肢与人机安全性”等方面介绍和讨论康复机器人和智能辅助系统的问题和研究进展,以期为未来康复机器人和智能辅助系统的研究与开发提供些许借鉴.
我国正面临日益严重的老龄化问题和数量庞大的残疾人群,康复机器人与智能辅助系统的研究开发和应用有望为解决养老、失能辅助和康复问题提供部分技术手段.康复机器人与智能辅助系统涉及医学、信息、机械、电子、材料、力学等多个学科领域,其研究与开发也面临诸多挑战和困难,本文从“康复机器人及多种康复训练模式”、“智能辅助系统与生机电技术”、“康复与辅助相关的多模态传感与控制方法”、“外骨骼和可穿戴系统、智能假肢与人机安全性”等方面介绍和讨论康复机器人和智能辅助系统的问题和研究进展,以期为未来康复机器人和智能辅助系统的研究与开发提供些许借鉴.
2016, 42(12): 1780-1793.
doi: 10.16383/j.aas.2016.y000007
摘要:
智能动力下肢假肢在残疾人生活中起着越来越重要的作用.解决人-智能假肢-环境融合中的关键科学问题是实现假肢穿戴者安全、流畅运动的必要条件.本文针对此问题,综述了面向人机融合的智能动力下肢假肢研究,包括智能动力下肢假肢的仿生结构和控制方法、人体运动意图识别、复杂环境下的人-智能假肢融合、以及用于下肢假肢的感知替代和反馈,深入探讨了智能动力下肢假肢人机融合研究中所面临的挑战和问题,最后,本文对该领域的未来发展方向进行了展望和总结.
智能动力下肢假肢在残疾人生活中起着越来越重要的作用.解决人-智能假肢-环境融合中的关键科学问题是实现假肢穿戴者安全、流畅运动的必要条件.本文针对此问题,综述了面向人机融合的智能动力下肢假肢研究,包括智能动力下肢假肢的仿生结构和控制方法、人体运动意图识别、复杂环境下的人-智能假肢融合、以及用于下肢假肢的感知替代和反馈,深入探讨了智能动力下肢假肢人机融合研究中所面临的挑战和问题,最后,本文对该领域的未来发展方向进行了展望和总结.


2016, 42(12): 1794-1807.
doi: 10.16383/j.aas.2016.c160144
摘要:
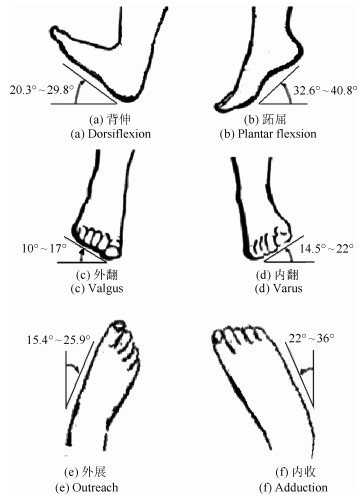
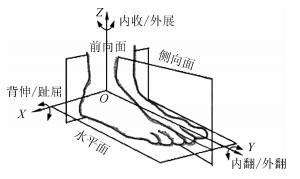
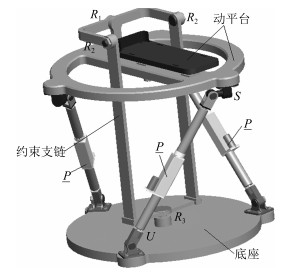
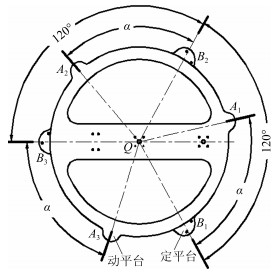
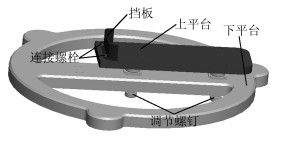
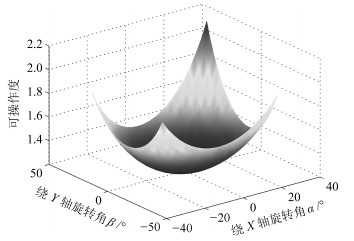
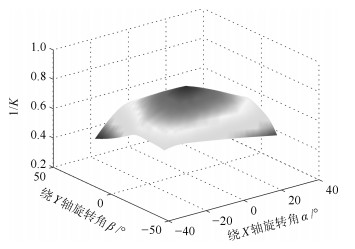
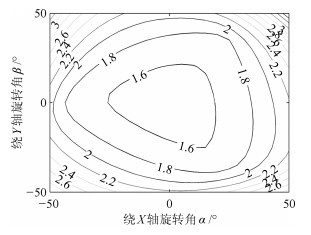
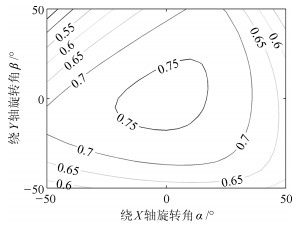
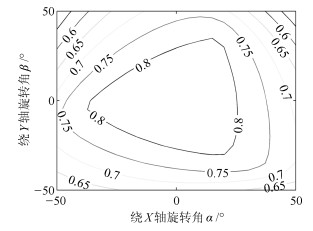
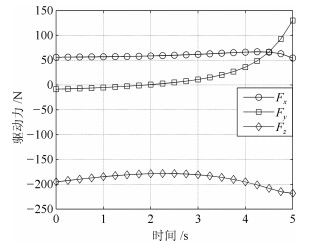
基于踝关节的生理解剖结构和运动特性分析,提出了一种适用于踝关节康复的3自由度3-UPS/RRR并联机构.该机构采用三个主动支链倾斜布置避开了机构的奇异位形,能满足踝关节康复运动需要,同时约束支链和动平台的设计使机构的转动中心与患者的踝关节转动中心重合.应用解析法得到了机构的位置反解,建立了速度雅可比矩阵和静力雅可比矩阵,求解了机构的工作空间.基于雅可比矩阵,仿真分析了机构的运动学性能和静力学性能.结果表明在规定的工作空间内机构具有良好的可操作性、运动灵活性、刚度特性和力矩传递性能.最后运用牛顿-欧拉法建立了机构的逆动力学方程,得到了驱动力、约束力与运动参数的关系,并给出了仿真实例.
基于踝关节的生理解剖结构和运动特性分析,提出了一种适用于踝关节康复的3自由度3-UPS/RRR并联机构.该机构采用三个主动支链倾斜布置避开了机构的奇异位形,能满足踝关节康复运动需要,同时约束支链和动平台的设计使机构的转动中心与患者的踝关节转动中心重合.应用解析法得到了机构的位置反解,建立了速度雅可比矩阵和静力雅可比矩阵,求解了机构的工作空间.基于雅可比矩阵,仿真分析了机构的运动学性能和静力学性能.结果表明在规定的工作空间内机构具有良好的可操作性、运动灵活性、刚度特性和力矩传递性能.最后运用牛顿-欧拉法建立了机构的逆动力学方程,得到了驱动力、约束力与运动参数的关系,并给出了仿真实例.











2016, 42(12): 1808-1818.
doi: 10.16383/j.aas.2016.c160171
摘要:
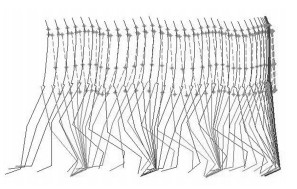
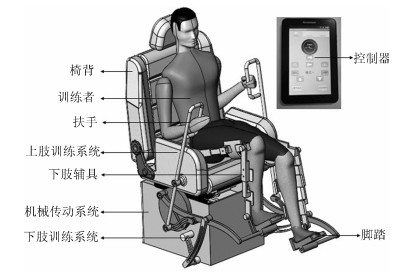
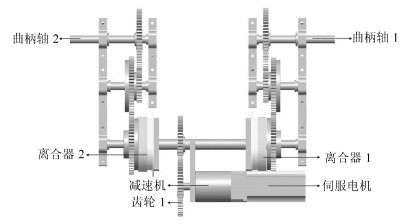
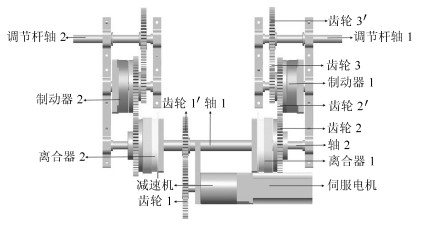
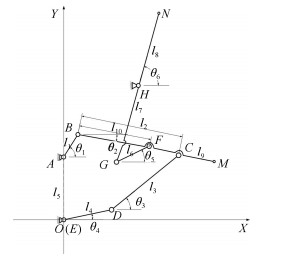
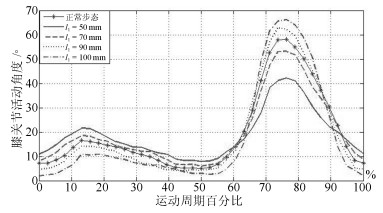
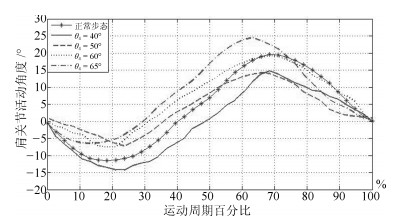
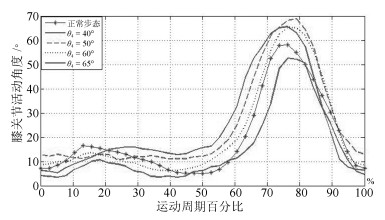
针对临床上缺少一种肢体协调运动康复训练设备的现状,研制了一款适用于偏瘫患者个性化训练的上下肢协调运动康复机器人.首先,在探究正常步态上下肢协调运动规律的基础上,选择以肩、膝关节角度协调变化规律作为机器人的设计目标;然后,基于五杆变胞机构设计了康复训练机构及主/辅传动链,并对训练机构进行了运动学分析;最后,在样机上进行了实验,结果表明该机器人能够满足设计目标.
针对临床上缺少一种肢体协调运动康复训练设备的现状,研制了一款适用于偏瘫患者个性化训练的上下肢协调运动康复机器人.首先,在探究正常步态上下肢协调运动规律的基础上,选择以肩、膝关节角度协调变化规律作为机器人的设计目标;然后,基于五杆变胞机构设计了康复训练机构及主/辅传动链,并对训练机构进行了运动学分析;最后,在样机上进行了实验,结果表明该机器人能够满足设计目标.







2016, 42(12): 1819-1831.
doi: 10.16383/j.aas.2016.c160215
摘要:
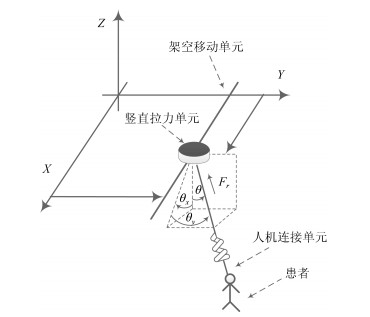
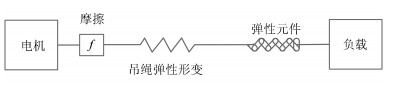
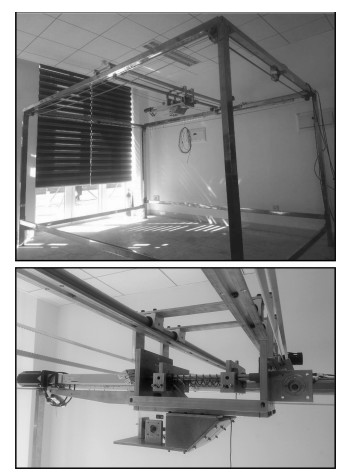
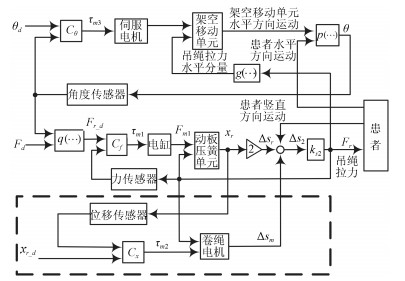
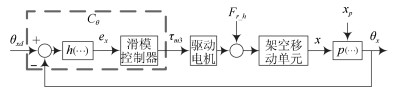
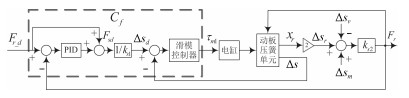
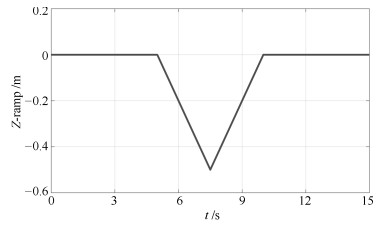
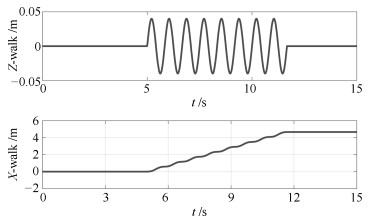
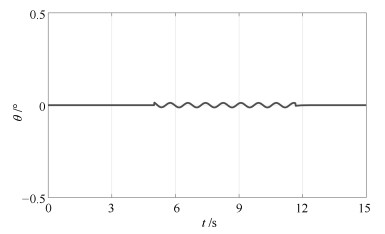
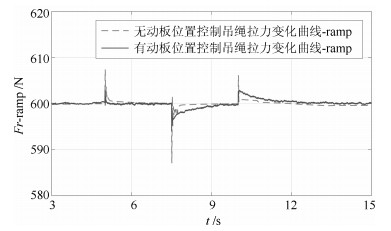
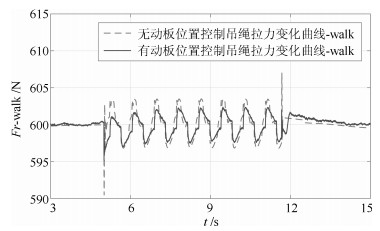
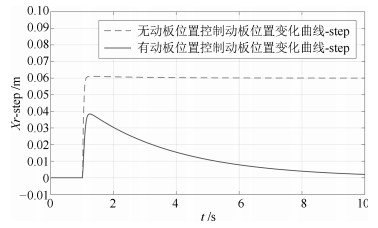
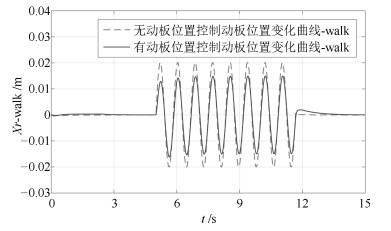
针对患者神经损伤后发生的下肢运动障碍,减重步行训练是一种重要的康复训练方式.对于中度和轻度患者,为其提供部分身体重力支撑(Body weight support,BWS)并激励其自主行走,可以提高患者的主动参与,并有助于改善其步态和平衡控制能力,从而有望取得更好的康复效果.现有的减重技术多存在运动空间小、减重力变化大、会对患者产生前后和侧向拉力等问题.为此,本文面向步态和平衡康复训练应用,采用单绳悬吊方式,设计电机驱动的竖直拉力单元,从而构建了一种主动减重系统.在水平方向,采用桥式吊架结构,通过伺服控制消除吊绳偏摆使其保持竖直,从而避免对患者产生前后和侧向的拉力干扰.在竖直方向,只有一个控制自由度却需要完成位置随动和减重力控制两个目标,是典型的欠驱动系统.为此,采用绳牵引串联弹性驱动方法,将位置和吊绳拉力耦合起来.针对系统中存在的非线性、摩擦等不利因素,采用滑模控制方法,分别设计了吊绳偏角控制器和吊绳拉力控制器.为保证系统安全运行,进一步针对竖直拉力单元中的弹簧连接动板设计了位置控制器.最后,通过仿真实验检验了本文提出的主动减重系统和控制方案效果.由此,可为下肢运动障碍患者提供一种方便高效的康复训练手段.
针对患者神经损伤后发生的下肢运动障碍,减重步行训练是一种重要的康复训练方式.对于中度和轻度患者,为其提供部分身体重力支撑(Body weight support,BWS)并激励其自主行走,可以提高患者的主动参与,并有助于改善其步态和平衡控制能力,从而有望取得更好的康复效果.现有的减重技术多存在运动空间小、减重力变化大、会对患者产生前后和侧向拉力等问题.为此,本文面向步态和平衡康复训练应用,采用单绳悬吊方式,设计电机驱动的竖直拉力单元,从而构建了一种主动减重系统.在水平方向,采用桥式吊架结构,通过伺服控制消除吊绳偏摆使其保持竖直,从而避免对患者产生前后和侧向的拉力干扰.在竖直方向,只有一个控制自由度却需要完成位置随动和减重力控制两个目标,是典型的欠驱动系统.为此,采用绳牵引串联弹性驱动方法,将位置和吊绳拉力耦合起来.针对系统中存在的非线性、摩擦等不利因素,采用滑模控制方法,分别设计了吊绳偏角控制器和吊绳拉力控制器.为保证系统安全运行,进一步针对竖直拉力单元中的弹簧连接动板设计了位置控制器.最后,通过仿真实验检验了本文提出的主动减重系统和控制方案效果.由此,可为下肢运动障碍患者提供一种方便高效的康复训练手段.




2016, 42(12): 1832-1838.
doi: 10.16383/j.aas.2016.c160173
摘要:
为探讨康复机器人辅助步行训练(Robot-assisted gait training,RAGT)对不完全性脊髓损伤(Incomplete spinal cord injury,ISCI)患者步行能力的影响,将16例ISCI患者随机分配至对照组(常规康复治疗+地面步行训练)及试验组(常规康复治疗+RAGT).治疗前及治疗4周、8周、12周后,分别进行下肢运动功能评分(Low extremity motor score,LEMS)及脊髓损伤步行指数II(Walking index for spinal cord injury II,WISCI II)评定.治疗后,两组患者LEMS均有提高(P < 0.05),但试验组LEMS与对照组比较差异无统计学意义(P>0.05).对照组治疗后各时间点WISCI II均较治疗前改善(P < 0.05),试验组在治疗8周及12周后WISCI II较治疗前改善(P < 0.05),但试验组WISCI II在训练12周后较对照组有明显提高(P < 0.05).RAGT与地面步行训练在提高肌力上比较无明显差异,但在改善步行能力上RAGT优于地面步行训练.
为探讨康复机器人辅助步行训练(Robot-assisted gait training,RAGT)对不完全性脊髓损伤(Incomplete spinal cord injury,ISCI)患者步行能力的影响,将16例ISCI患者随机分配至对照组(常规康复治疗+地面步行训练)及试验组(常规康复治疗+RAGT).治疗前及治疗4周、8周、12周后,分别进行下肢运动功能评分(Low extremity motor score,LEMS)及脊髓损伤步行指数II(Walking index for spinal cord injury II,WISCI II)评定.治疗后,两组患者LEMS均有提高(P < 0.05),但试验组LEMS与对照组比较差异无统计学意义(P>0.05).对照组治疗后各时间点WISCI II均较治疗前改善(P < 0.05),试验组在治疗8周及12周后WISCI II较治疗前改善(P < 0.05),但试验组WISCI II在训练12周后较对照组有明显提高(P < 0.05).RAGT与地面步行训练在提高肌力上比较无明显差异,但在改善步行能力上RAGT优于地面步行训练.
2016, 42(12): 1839-1848.
doi: 10.16383/j.aas.2016.c160137
摘要:
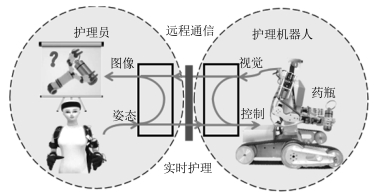
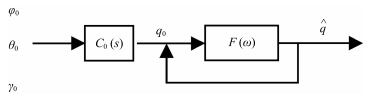
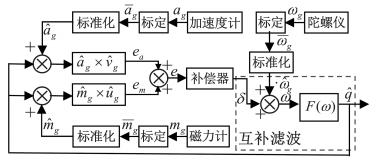
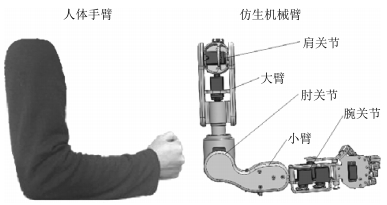
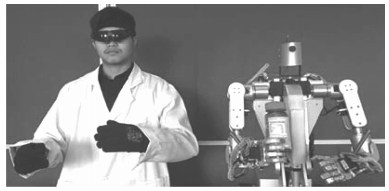
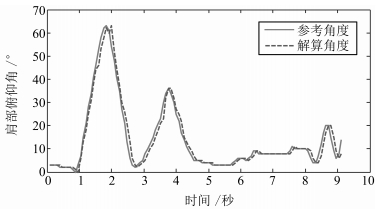
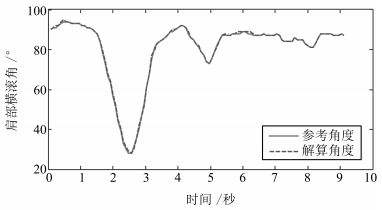
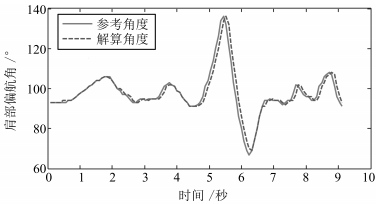
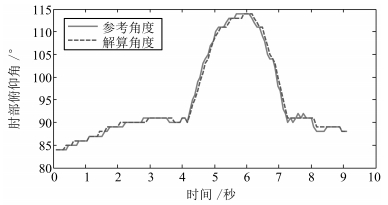
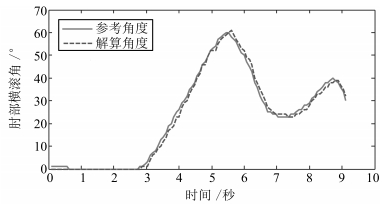
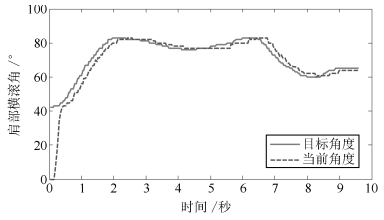
设计了一种遥操作护理机器人系统,为实现从端同构式机器人的随动运动控制,对主端操作者人体姿态解算方法进行了研究.首先,构建由惯性传感单元构成的动作捕捉系统,对用作从端机器人动作指令的操作者人体姿态信息进行采集,采用四元数法对人体运动原始数据进行初步求解.其次,将四元数法得到的姿态数据解算成依据仿人结构设计的护理机器人各关节运动的目标姿态角,实现人体姿态到机器人动作的同构性映射.最后,为验证本文所提姿态解算方法的性能,设计了操作者控制护理机器人完成递送和拿取药瓶动作的实验.结果表明,本文姿态解算方法的解算性能与参考系统基本相同;在操作者动作姿态快速变化的时间段,系统仍可获得较高精度的目标姿态数据,其误差在动态条件下依旧能保持在2%以下;护理机器人可较好地实时复现操作者的人体动作.本文方法能满足机器人进行一般护理作业时对人体姿态数据处理的快速性和准确性要求.
设计了一种遥操作护理机器人系统,为实现从端同构式机器人的随动运动控制,对主端操作者人体姿态解算方法进行了研究.首先,构建由惯性传感单元构成的动作捕捉系统,对用作从端机器人动作指令的操作者人体姿态信息进行采集,采用四元数法对人体运动原始数据进行初步求解.其次,将四元数法得到的姿态数据解算成依据仿人结构设计的护理机器人各关节运动的目标姿态角,实现人体姿态到机器人动作的同构性映射.最后,为验证本文所提姿态解算方法的性能,设计了操作者控制护理机器人完成递送和拿取药瓶动作的实验.结果表明,本文姿态解算方法的解算性能与参考系统基本相同;在操作者动作姿态快速变化的时间段,系统仍可获得较高精度的目标姿态数据,其误差在动态条件下依旧能保持在2%以下;护理机器人可较好地实时复现操作者的人体动作.本文方法能满足机器人进行一般护理作业时对人体姿态数据处理的快速性和准确性要求.





2016, 42(12): 1849-1858.
doi: 10.16383/j.aas.2016.c160211
摘要:
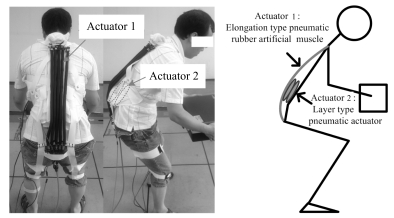
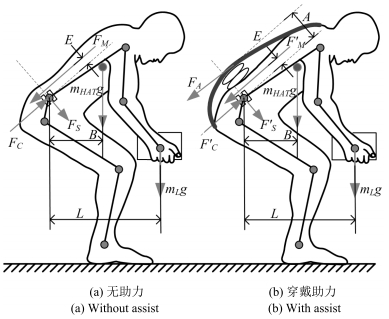
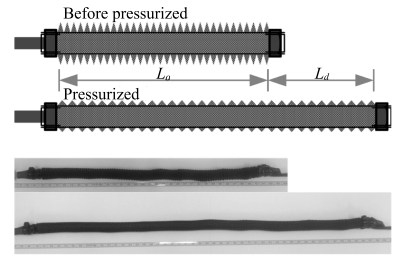
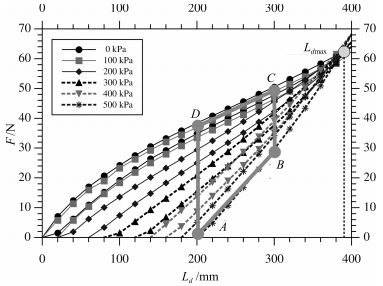
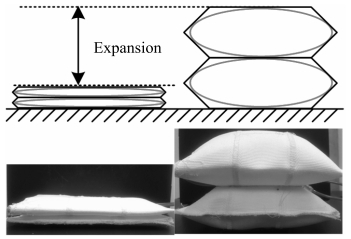
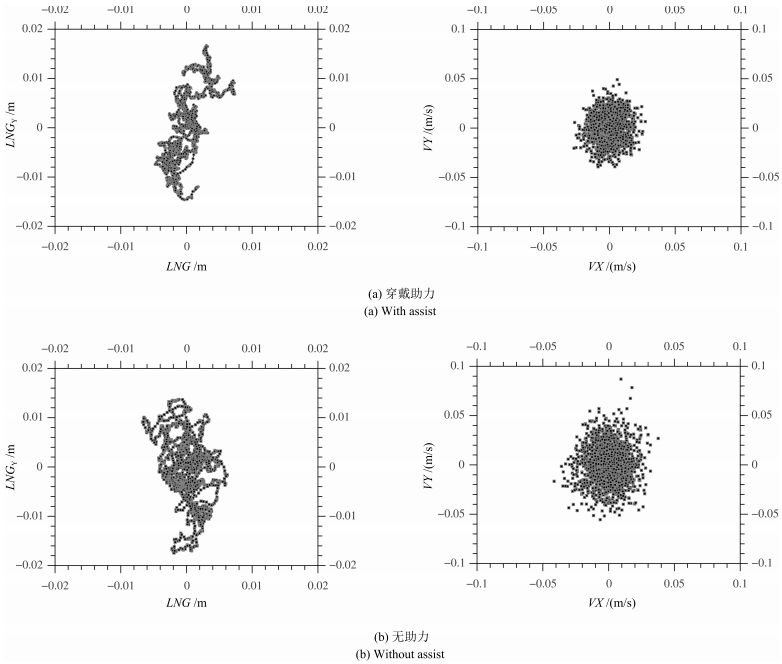
针对老龄化社会对于康复和看护助力搬运的需要,提出了用气压驱动器实现轻量、柔性助力、穿戴舒适的可穿戴式腰部助力机器人.机器人采用无外骨骼的结构设计,可以给护理人员在提升重物和静态保持作业时输出腰部所需助力,降低下腰痛(Low back pain,LBP)致病风险.通过对重物搬运作业中穿戴者竖脊肌表面肌电信号(Surface electromyography,sEMG)评估、基于测力平台最大搬举重量测试、静态弯腰负重作业下人体重心(Center of gravity,COG)移动轨迹等相关实验,验证了助力有效性.
针对老龄化社会对于康复和看护助力搬运的需要,提出了用气压驱动器实现轻量、柔性助力、穿戴舒适的可穿戴式腰部助力机器人.机器人采用无外骨骼的结构设计,可以给护理人员在提升重物和静态保持作业时输出腰部所需助力,降低下腰痛(Low back pain,LBP)致病风险.通过对重物搬运作业中穿戴者竖脊肌表面肌电信号(Surface electromyography,sEMG)评估、基于测力平台最大搬举重量测试、静态弯腰负重作业下人体重心(Center of gravity,COG)移动轨迹等相关实验,验证了助力有效性.






2016, 42(12): 1859-1873.
doi: 10.16383/j.aas.2016.c160163
摘要:
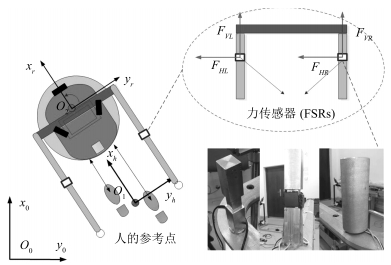
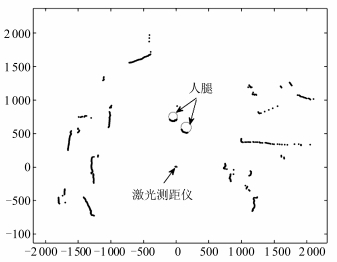
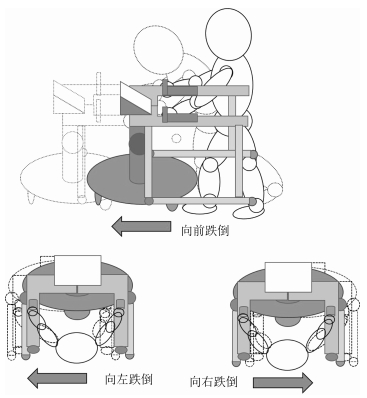
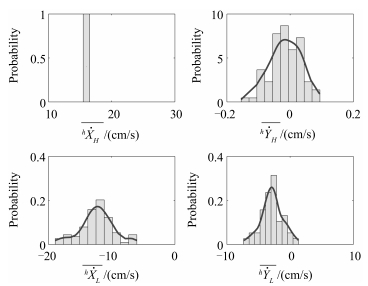
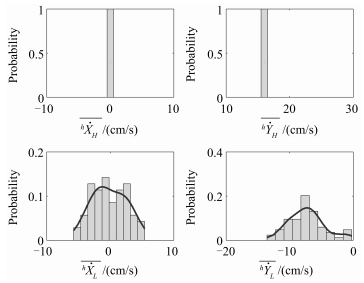
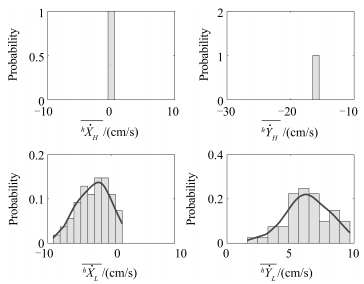
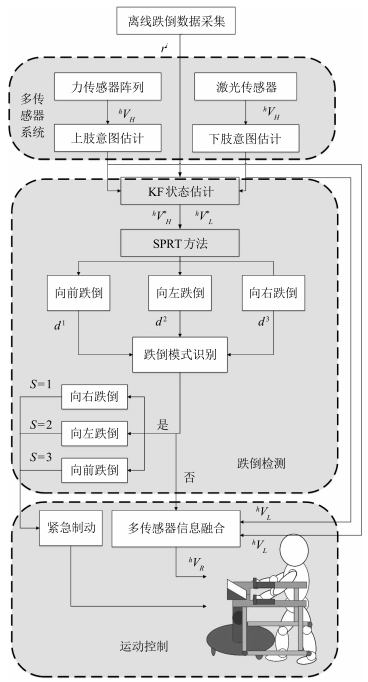
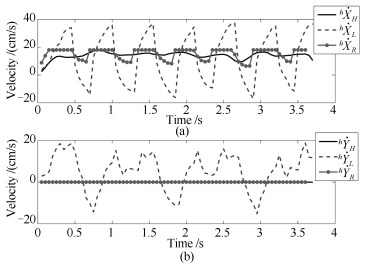
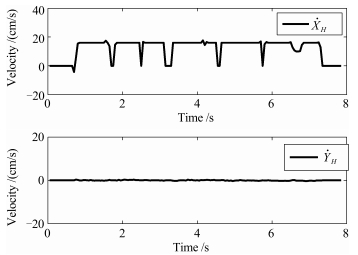
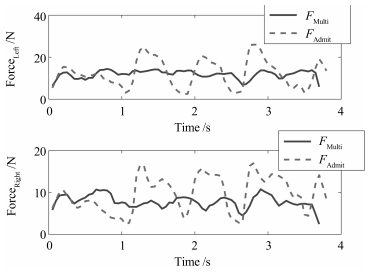
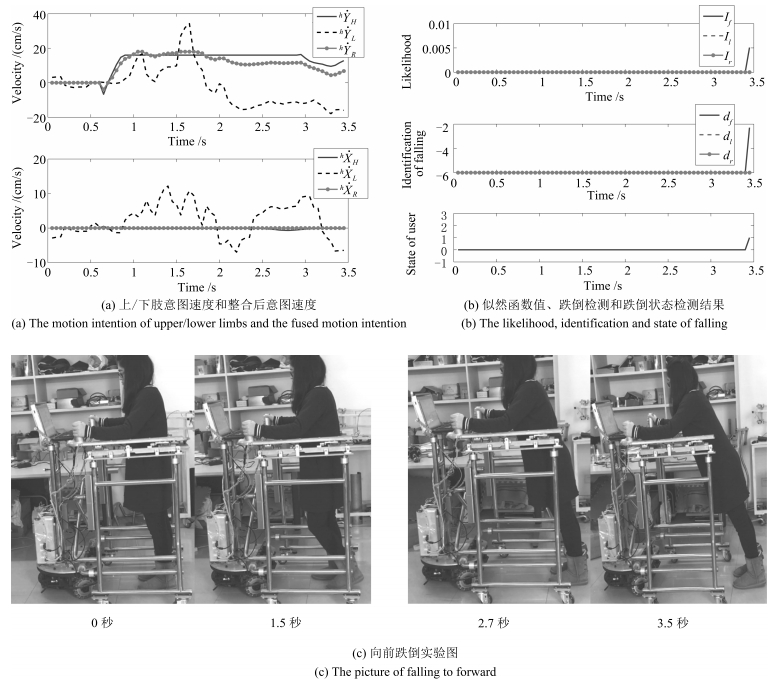
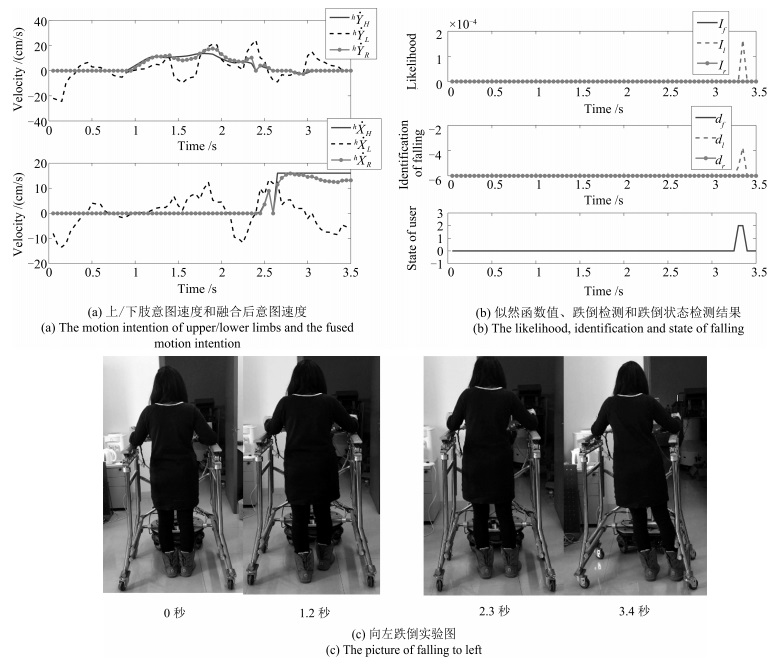
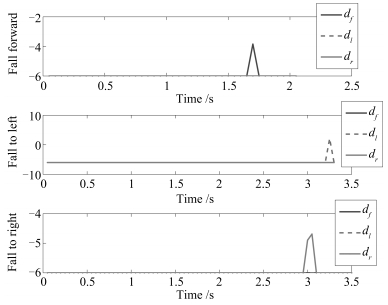
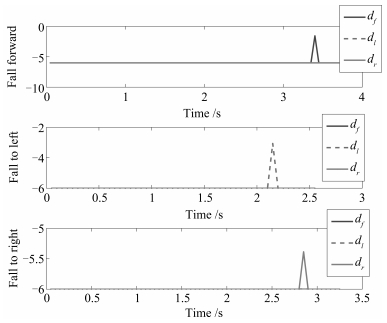
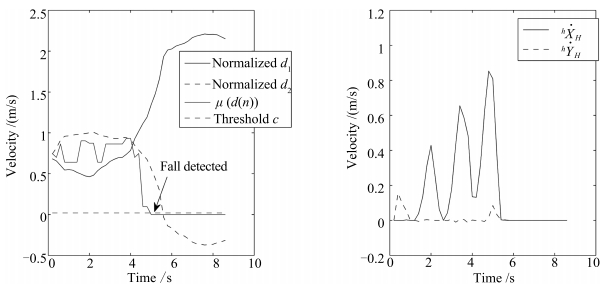
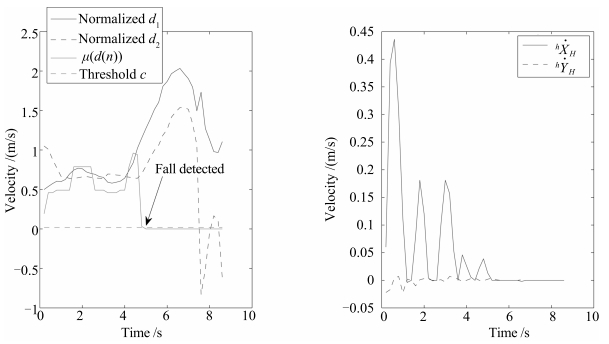
针对助行机器人的柔顺性和安全性问题,基于多传感器系统融合技术,本文提出了一种能够兼具柔顺与安全的助行机器人运动控制方法.首先介绍了助行机器人的机械结构、控制原理以及多传感器系统,然后根据机器人多传感器系统,设计出各传感器相对应的用户意图估计方法,提出了一种基于多传感器融合的助行机器人柔顺运动控制算法.分析用户可能发生的跌倒模式,使用基于卡尔曼滤波(Kalman filter,KF)的序贯概率比检验(Sequential probability ratio test,SPRT)方法和决策函数来判断用户是否会跌倒,并判断处于哪种跌倒模式.最后,通过助行机器人柔顺运动控制实验和用户跌倒检测实验验证了算法的有效性.
针对助行机器人的柔顺性和安全性问题,基于多传感器系统融合技术,本文提出了一种能够兼具柔顺与安全的助行机器人运动控制方法.首先介绍了助行机器人的机械结构、控制原理以及多传感器系统,然后根据机器人多传感器系统,设计出各传感器相对应的用户意图估计方法,提出了一种基于多传感器融合的助行机器人柔顺运动控制算法.分析用户可能发生的跌倒模式,使用基于卡尔曼滤波(Kalman filter,KF)的序贯概率比检验(Sequential probability ratio test,SPRT)方法和决策函数来判断用户是否会跌倒,并判断处于哪种跌倒模式.最后,通过助行机器人柔顺运动控制实验和用户跌倒检测实验验证了算法的有效性.






2016, 42(12): 1874-1885.
doi: 10.16383/j.aas.2016.c160185
摘要:
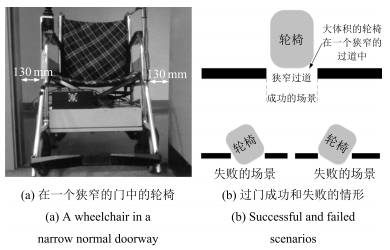
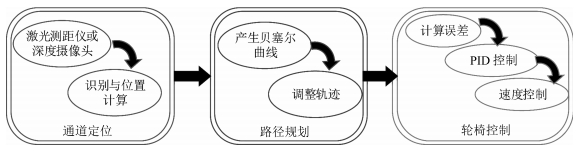
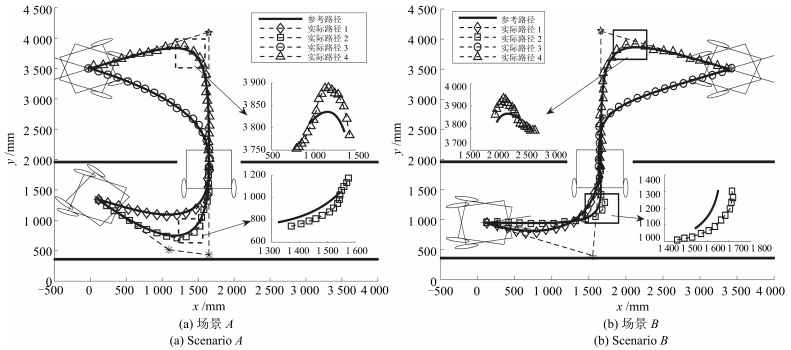
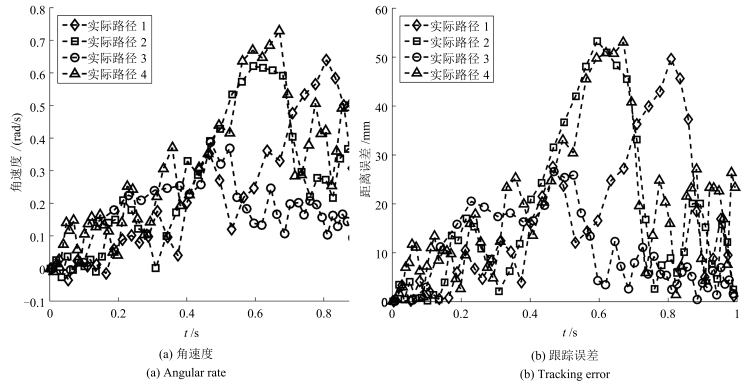
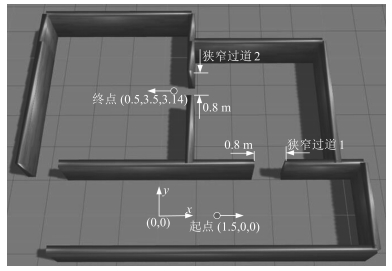
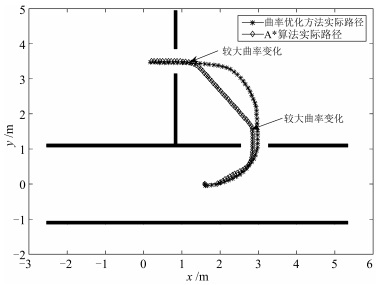
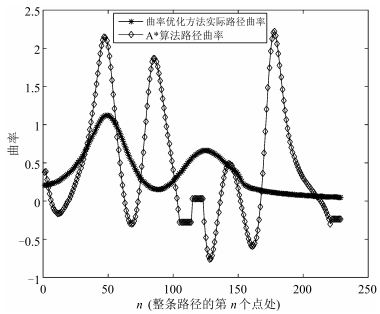
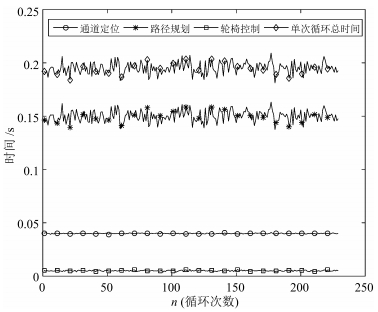
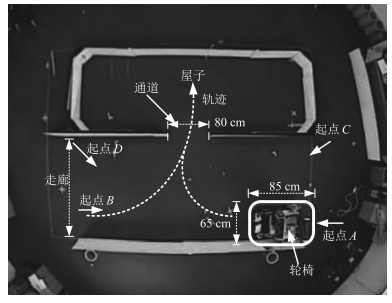
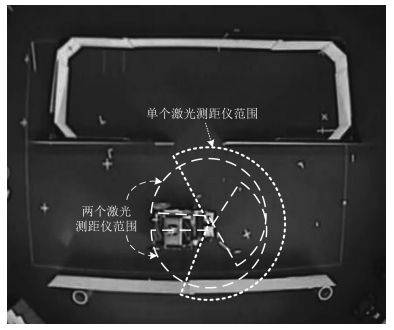
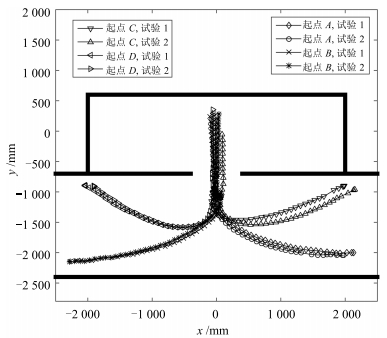
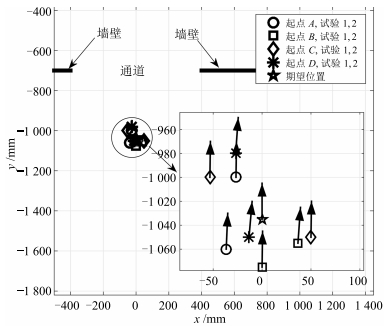
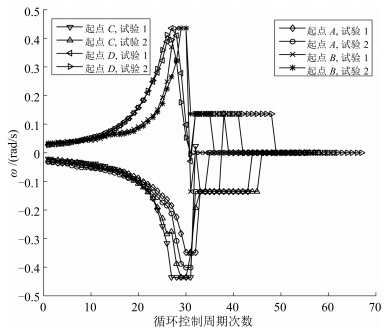
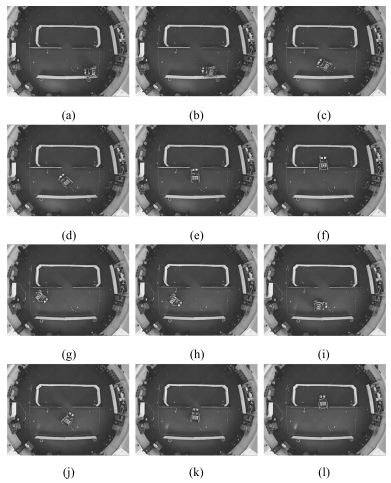
为了使用户更感舒适,智能轮椅应该能在具有复杂几何约束的室内环境下平滑地通过狭窄通道.本文提出一个基于路径曲率优化的算法以确保智能轮椅平滑地通过狭窄过道.考虑到路径平滑度取决于路径曲率及其变化率,在通过传感器数据计算出狭窄通道相对于轮椅的位置后,算法以贝塞尔曲线的曲率及其变化率最小为优化目标,以轮椅过通道时的方向及贝塞尔多边形应为凸多边形作为约束,规划出一条平滑的最优路径,然后控制轮椅实时跟踪这条路径.上述过程动态循环运行,实现了智能轮椅平滑通过狭窄通道.仿真中将本文算法同基于A*的路径规划导航算法进行了对比,结果表明本文提出的基于曲率优化的算法可以实现比A*算法路径曲率更小且更加平滑的过狭窄通道过程,并且即使在没有全局地图和定位信息情况下,算法也能控制轮椅平滑地通过狭窄过道.实验中详细阐述了算法的实现过程,实验结果也证实了算法的有效性.
为了使用户更感舒适,智能轮椅应该能在具有复杂几何约束的室内环境下平滑地通过狭窄通道.本文提出一个基于路径曲率优化的算法以确保智能轮椅平滑地通过狭窄过道.考虑到路径平滑度取决于路径曲率及其变化率,在通过传感器数据计算出狭窄通道相对于轮椅的位置后,算法以贝塞尔曲线的曲率及其变化率最小为优化目标,以轮椅过通道时的方向及贝塞尔多边形应为凸多边形作为约束,规划出一条平滑的最优路径,然后控制轮椅实时跟踪这条路径.上述过程动态循环运行,实现了智能轮椅平滑通过狭窄通道.仿真中将本文算法同基于A*的路径规划导航算法进行了对比,结果表明本文提出的基于曲率优化的算法可以实现比A*算法路径曲率更小且更加平滑的过狭窄通道过程,并且即使在没有全局地图和定位信息情况下,算法也能控制轮椅平滑地通过狭窄过道.实验中详细阐述了算法的实现过程,实验结果也证实了算法的有效性.




2016, 42(12): 1886-1898.
doi: 10.16383/j.aas.2016.c160109
摘要:
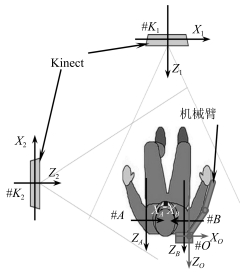
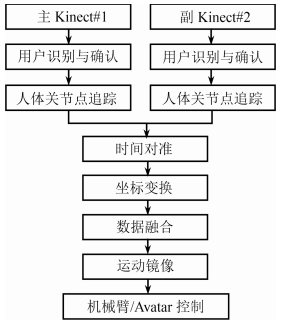
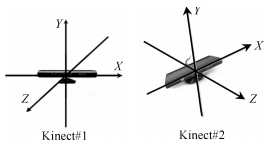
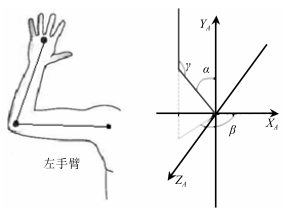
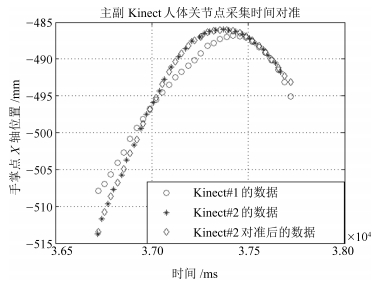
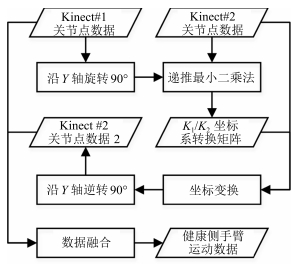
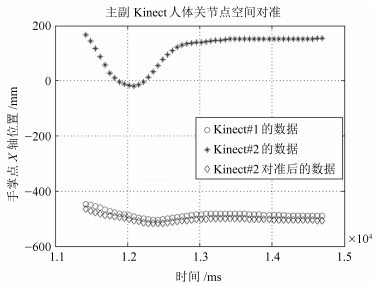
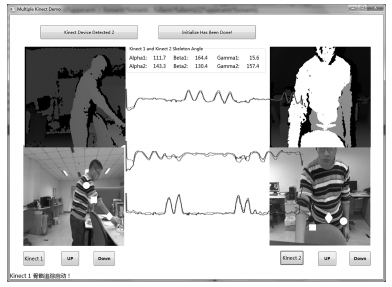
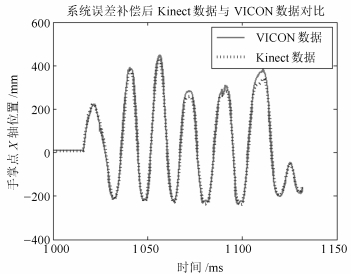
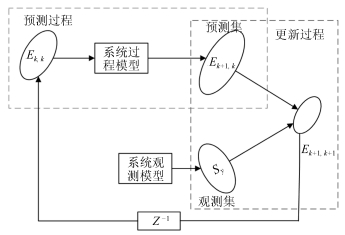
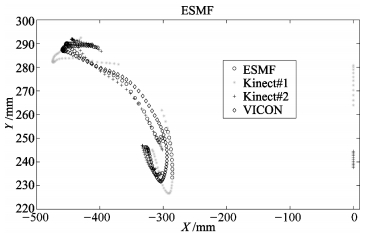
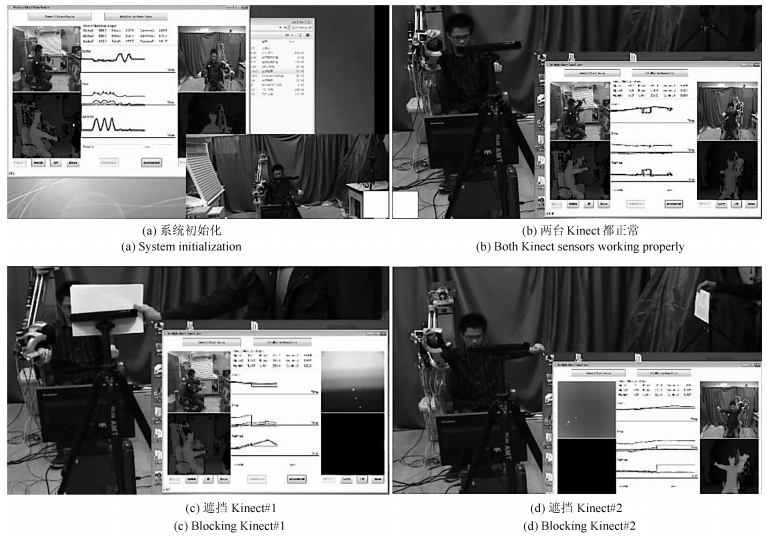
以Kinect为代表的深度图像传感器在肢体康复系统中得到广泛应用.单一深度图像传感器采集人体关节点数据时由于肢体遮挡、传感器数据错误和丢失等原因降低系统可靠性.本文研究了利用两台Kinect深度图像传感器进行数据融合从而达到消除遮挡、数据错误和丢失的目的,提高康复系统中数据的稳定性和可靠性.首先,利用两台Kinect采集患者健康侧手臂运动数据;其次,对两组数据做时间对准、Bursa线性模型下的坐标变换和基于集员滤波的数据融合;再次,将融合后的健康侧手臂运动数据经过“镜像运动”作为患侧手臂运动指令;最后,将患侧运动指令下发给可穿戴式镜像康复外骨骼带动患者患侧手臂完成三维动画提示的康复动作,达到患者主动可控康复的目的.本文通过Kinect与VICON系统联合实验以及7自由度机械臂控制实验验证了数据融合方法的有效性,以及两台Kinect可有效解决上述问题.
以Kinect为代表的深度图像传感器在肢体康复系统中得到广泛应用.单一深度图像传感器采集人体关节点数据时由于肢体遮挡、传感器数据错误和丢失等原因降低系统可靠性.本文研究了利用两台Kinect深度图像传感器进行数据融合从而达到消除遮挡、数据错误和丢失的目的,提高康复系统中数据的稳定性和可靠性.首先,利用两台Kinect采集患者健康侧手臂运动数据;其次,对两组数据做时间对准、Bursa线性模型下的坐标变换和基于集员滤波的数据融合;再次,将融合后的健康侧手臂运动数据经过“镜像运动”作为患侧手臂运动指令;最后,将患侧运动指令下发给可穿戴式镜像康复外骨骼带动患者患侧手臂完成三维动画提示的康复动作,达到患者主动可控康复的目的.本文通过Kinect与VICON系统联合实验以及7自由度机械臂控制实验验证了数据融合方法的有效性,以及两台Kinect可有效解决上述问题.





2016, 42(12): 1899-1914.
doi: 10.16383/j.aas.2016.c160057
摘要:
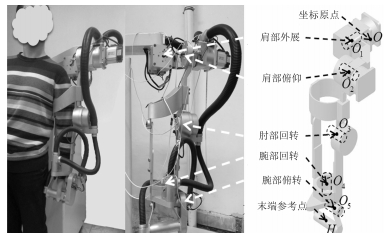
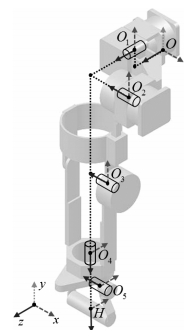
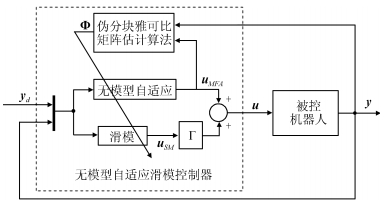
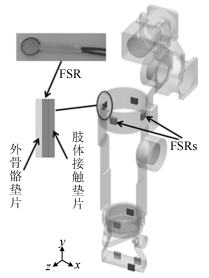
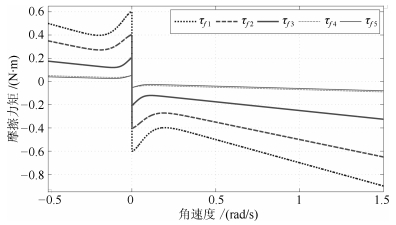
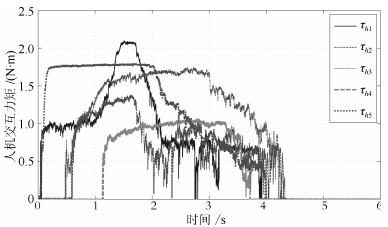
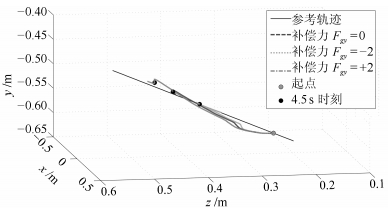
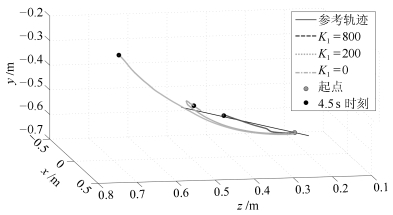
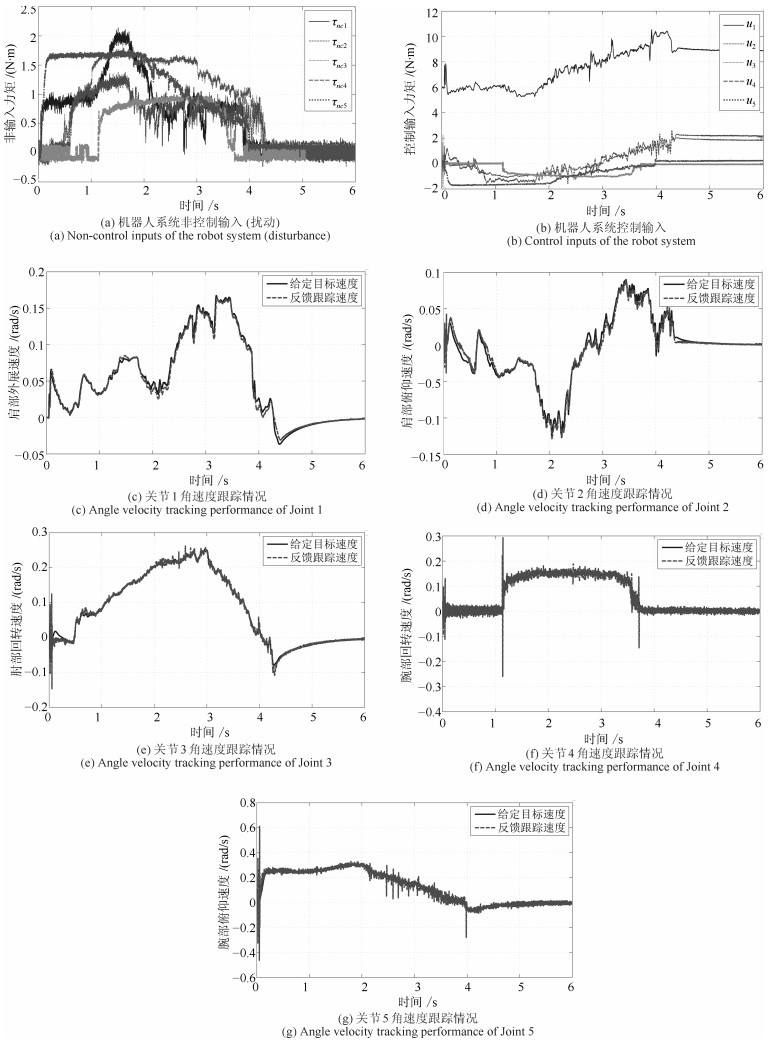
设计了一种基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.在机器人与人体上肢接触面安装力传感器采集人机交互力矩信息作为量化的主动运动意图,设计了一种无模型自适应滤波算法使交互力矩变得平滑而连贯;以人机交互力矩为输入,综合考虑机器人末端点与参考轨迹的相对位置和补偿力的信息,设计了人机交互阻抗控制器,用于调节各关节的给定目标速度;设计了将无模型自适应与离散滑模趋近律相结合的速度控制器完成机器人各关节对目标速度的跟踪.仿真结果表明,该控制方法可以实现外骨骼式上肢康复机器人辅助患者完成主动交互训练的功能.通过调节人机交互阻抗控制器的相应参数,机器人可以按照患者的运动意图完成不同的主动交互训练任务,并在运动出现偏差时予以矫正.控制器在设计实现过程中不要求复杂准确的动力学建模和参数识别,并有一定的抗干扰性和通用性.
设计了一种基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.在机器人与人体上肢接触面安装力传感器采集人机交互力矩信息作为量化的主动运动意图,设计了一种无模型自适应滤波算法使交互力矩变得平滑而连贯;以人机交互力矩为输入,综合考虑机器人末端点与参考轨迹的相对位置和补偿力的信息,设计了人机交互阻抗控制器,用于调节各关节的给定目标速度;设计了将无模型自适应与离散滑模趋近律相结合的速度控制器完成机器人各关节对目标速度的跟踪.仿真结果表明,该控制方法可以实现外骨骼式上肢康复机器人辅助患者完成主动交互训练的功能.通过调节人机交互阻抗控制器的相应参数,机器人可以按照患者的运动意图完成不同的主动交互训练任务,并在运动出现偏差时予以矫正.控制器在设计实现过程中不要求复杂准确的动力学建模和参数识别,并有一定的抗干扰性和通用性.





2016, 42(12): 1915-1922.
doi: 10.16383/j.aas.2016.c160122
摘要:
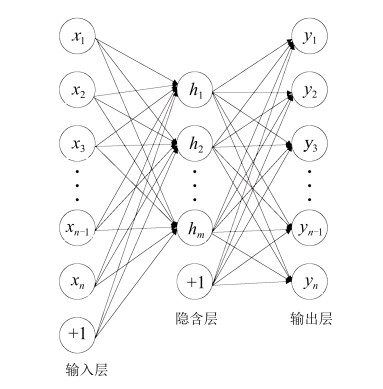
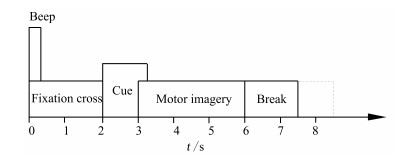
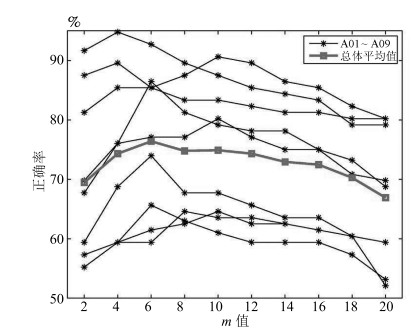
共同空间模式(Common spatial pattern,CSP)是运动想象脑机接口(Brain-computer interface,BCI)中常用的特征提取方法,但对多类任务的分类正确率却明显低于两类任务.通过引入堆叠降噪自动编码器(Stacked denoising autoencoders,SDA),提出了一种多类运动想象脑电信号(Electroencephalogram,EEG)的两级特征提取方法.首先利用一对多CSP(One versus rest CSP,OVR-CSP)将脑电信号变换到使信号方差区别最大的低维空间,然后通过SDA网络提取其中可以更好表达类别属性的高层抽象特征,最后使用Softmax分类器进行分类.在对BCI竞赛IV中Data-sets 2a的4类运动想象任务进行的分类实验中,平均Kappa系数达到0.69,表明了所提出的特征提取方法的有效性和鲁棒性.
共同空间模式(Common spatial pattern,CSP)是运动想象脑机接口(Brain-computer interface,BCI)中常用的特征提取方法,但对多类任务的分类正确率却明显低于两类任务.通过引入堆叠降噪自动编码器(Stacked denoising autoencoders,SDA),提出了一种多类运动想象脑电信号(Electroencephalogram,EEG)的两级特征提取方法.首先利用一对多CSP(One versus rest CSP,OVR-CSP)将脑电信号变换到使信号方差区别最大的低维空间,然后通过SDA网络提取其中可以更好表达类别属性的高层抽象特征,最后使用Softmax分类器进行分类.在对BCI竞赛IV中Data-sets 2a的4类运动想象任务进行的分类实验中,平均Kappa系数达到0.69,表明了所提出的特征提取方法的有效性和鲁棒性.



2016, 42(12): 1923-1932.
doi: 10.16383/j.aas.2016.c160217
摘要:
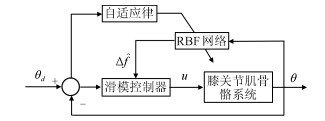
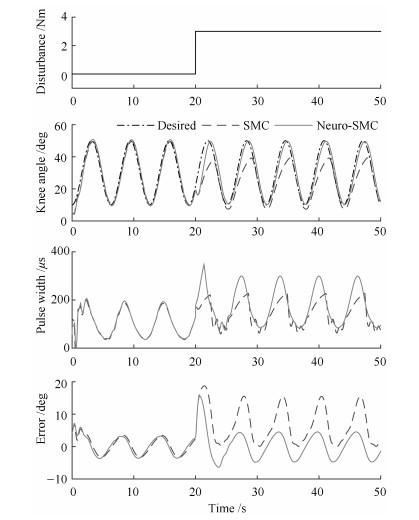
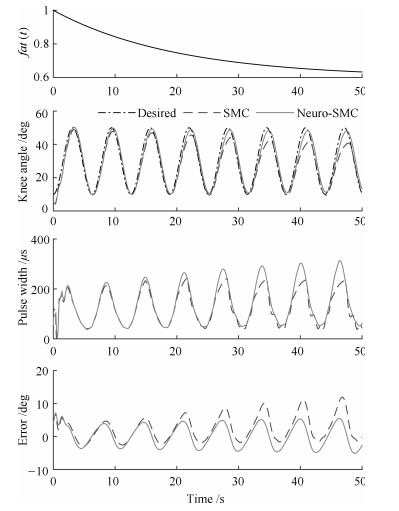
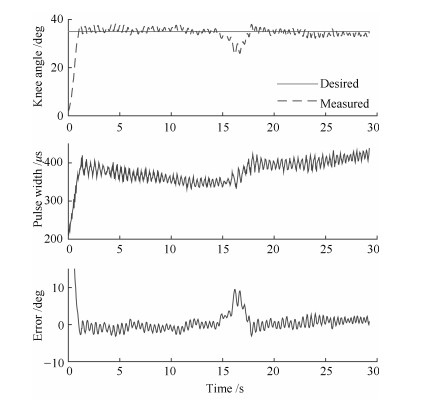
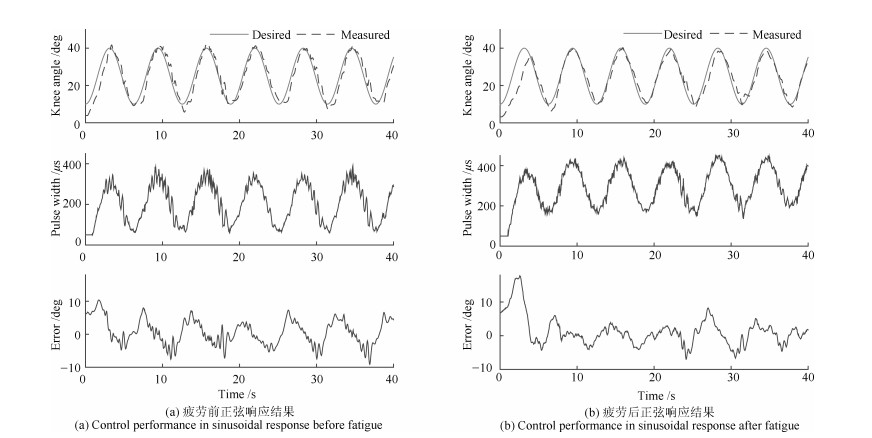
针对功能性电刺激(Functional electrical stimulation,FES)下外部干扰和肌肉疲劳对关节运动的影响,提出了一种神经网络自适应滑模控制方法以获得更加精确的关节运动.本文建立了电刺激下的关节运动模型,在此模型的基础上设计了滑模控制律,利用径向基神经网络在线逼近系统不确定特性,并通过Lyapunov方法设计了径向基神经网络的自适应律,以电刺激所产生的膝关节运动控制为例,通过仿真和实验研究验证了该神经网络滑模控制方法相对于传统的滑模控制来说,不仅可以准确地控制电刺激而获得期望的关节运动,而且当关节运动受到外部干扰和肌肉疲劳的影响时,还可自适应地对此进行补偿,有效地调节电刺激强度以获得准确的关节运动.
针对功能性电刺激(Functional electrical stimulation,FES)下外部干扰和肌肉疲劳对关节运动的影响,提出了一种神经网络自适应滑模控制方法以获得更加精确的关节运动.本文建立了电刺激下的关节运动模型,在此模型的基础上设计了滑模控制律,利用径向基神经网络在线逼近系统不确定特性,并通过Lyapunov方法设计了径向基神经网络的自适应律,以电刺激所产生的膝关节运动控制为例,通过仿真和实验研究验证了该神经网络滑模控制方法相对于传统的滑模控制来说,不仅可以准确地控制电刺激而获得期望的关节运动,而且当关节运动受到外部干扰和肌肉疲劳的影响时,还可自适应地对此进行补偿,有效地调节电刺激强度以获得准确的关节运动.






2016, 42(12): 1933-1942.
doi: 10.16383/j.aas.2016.c160180
摘要:
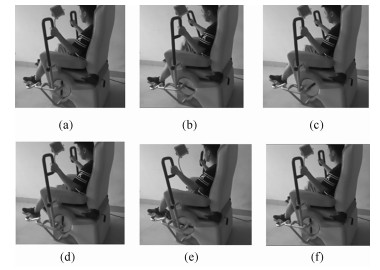
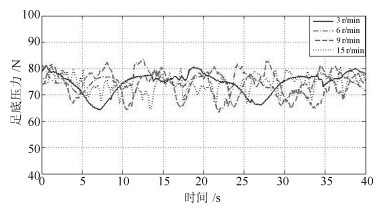
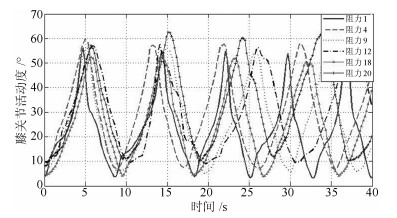
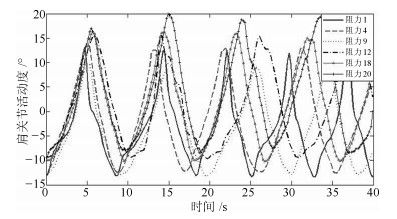
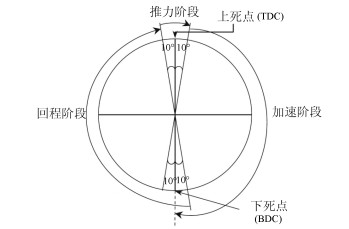
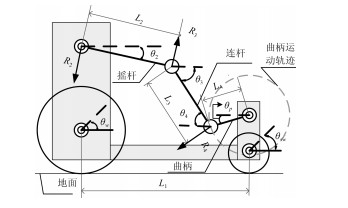
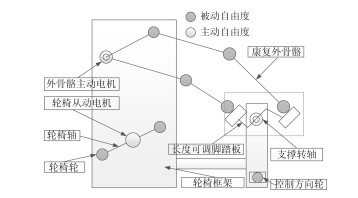
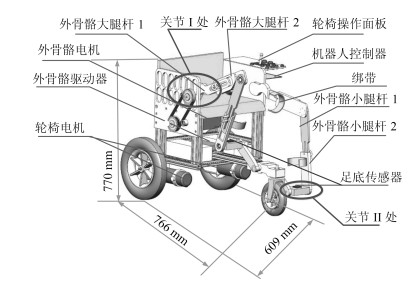
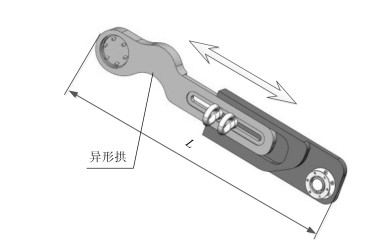
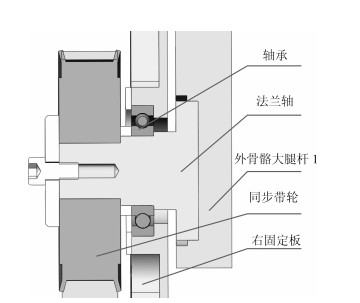
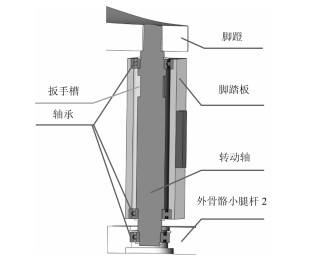
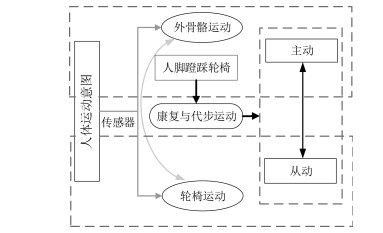
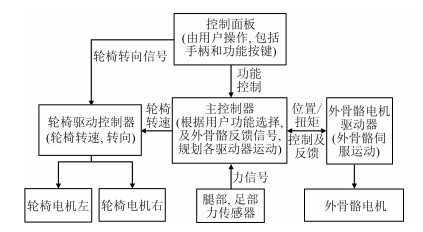
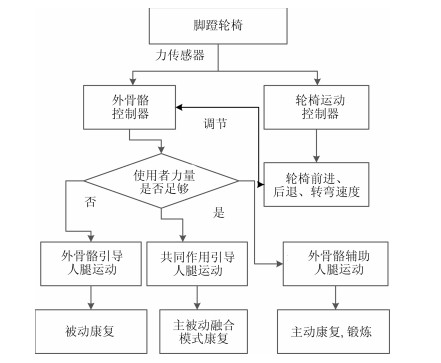
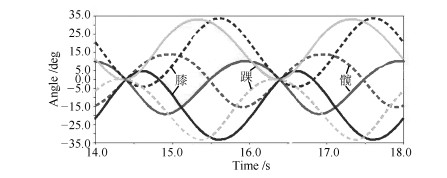
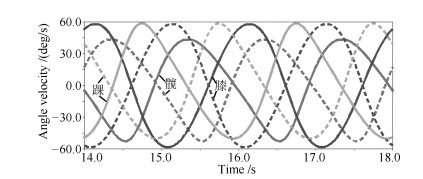
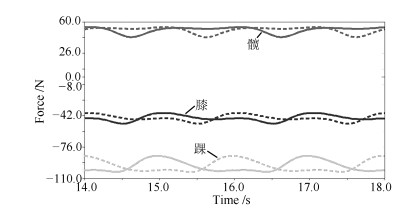
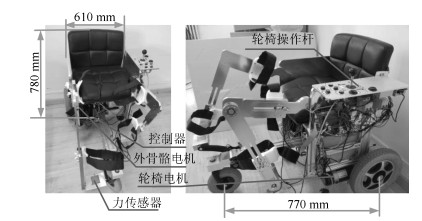
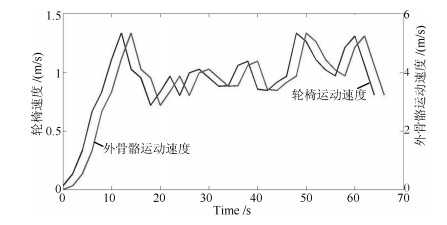
针对老年人及下肢障碍者康复训练与代步问题,本文提出一种新的康复与代步外骨骼机器人.本文首先详细介绍了机器人各部分组成及机构设计方案,通过下肢外骨骼与轮椅的有机结合,有效保持或恢复老年人、脑卒中患者下肢运动能力的同时,为患者提供一种方便的代步工具;运用脚蹬车运动制订康复训练策略,可保持下肢康复训练轨迹固定,保证患者安全;提出主从式操作方法及多模态康复训练控制流程提高使用者参与感.最后通过仿真与实验验证了所提康复系统的可行性与设计的正确性.
针对老年人及下肢障碍者康复训练与代步问题,本文提出一种新的康复与代步外骨骼机器人.本文首先详细介绍了机器人各部分组成及机构设计方案,通过下肢外骨骼与轮椅的有机结合,有效保持或恢复老年人、脑卒中患者下肢运动能力的同时,为患者提供一种方便的代步工具;运用脚蹬车运动制订康复训练策略,可保持下肢康复训练轨迹固定,保证患者安全;提出主从式操作方法及多模态康复训练控制流程提高使用者参与感.最后通过仿真与实验验证了所提康复系统的可行性与设计的正确性.



2016, 42(12): 1943-1950.
doi: 10.16383/j.aas.2016.c160080
摘要:
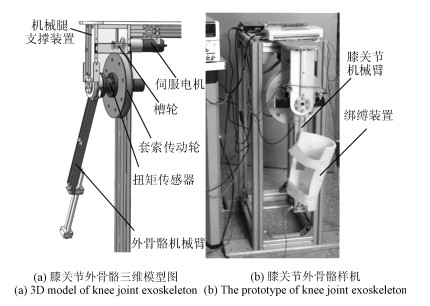
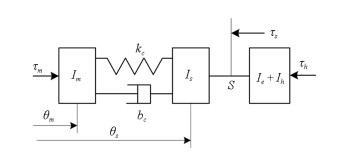
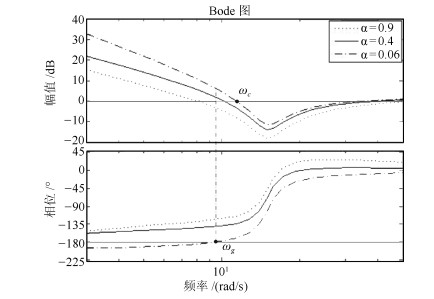
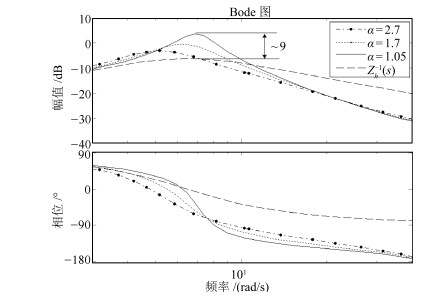
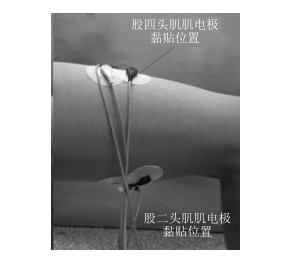
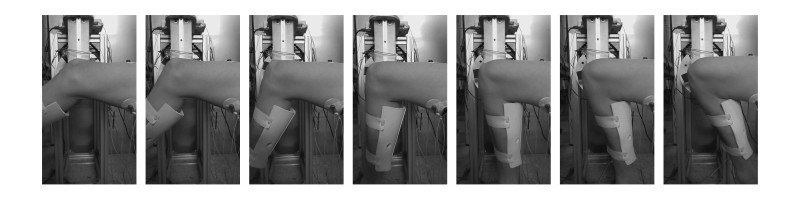
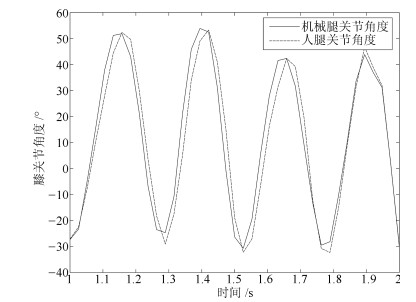
针对膝关节外骨骼机械腿运动过程中对操作者的运动跟随问题,提出了一种基于导纳原理的等效惯量补偿控制方法.设计导纳控制器将外骨骼与操作者间的交互力矩转化为期望的运动轨迹;通过低通滤波加速度与惯量增益的乘积形成的闭环反馈实现等效惯量补偿;结合腿部肌肉表面肌电信号进行人体摆腿运动换向的预判,实施膝关节外骨骼机械腿的摆动控制,实验结果表明,膝关节外骨骼与受试者之间的关节角度相对误差为±12%,膝关节外骨骼机械腿对受试者的摆腿运动能实现较好的运动跟随.
针对膝关节外骨骼机械腿运动过程中对操作者的运动跟随问题,提出了一种基于导纳原理的等效惯量补偿控制方法.设计导纳控制器将外骨骼与操作者间的交互力矩转化为期望的运动轨迹;通过低通滤波加速度与惯量增益的乘积形成的闭环反馈实现等效惯量补偿;结合腿部肌肉表面肌电信号进行人体摆腿运动换向的预判,实施膝关节外骨骼机械腿的摆动控制,实验结果表明,膝关节外骨骼与受试者之间的关节角度相对误差为±12%,膝关节外骨骼机械腿对受试者的摆腿运动能实现较好的运动跟随.


2016, 42(12): 1951-1959.
doi: 10.16383/j.aas.2016.c160205
摘要:
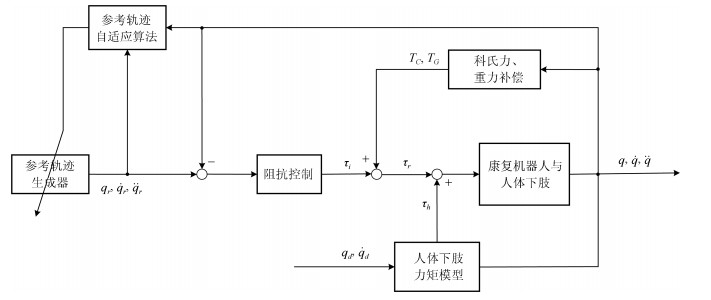
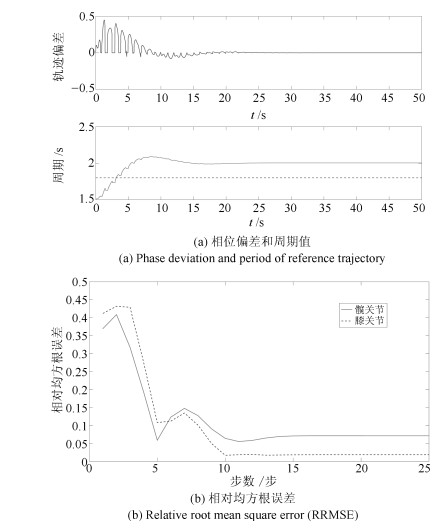
步态训练轨迹是影响康复训练效果的一项重要因素,而自适应性对于下肢康复机器人的临床应用具有重要的意义.振荡器可通过在线调节参数而输出不同波形的周期信号,常用于康复机器人步态轨迹的生成.本文在高斯核函数非线性振荡器的基础上提出了一种下肢康复机器人步态轨迹自适应算法.该算法通过轨迹偏差实现对参考轨迹波形的调节,并且用相位偏差曲线面积实现参考轨迹周期的自适应.本文首先介绍了用于生成步态参考轨迹的非线性振荡器的数学模型;其次,详细描述了基于该模型的参考轨迹波形和周期自适应算法;最后,以悬挂减重式下肢康复机器人为研究对象,建立机器人与人体下肢仿真模型,对所提出的步态参考轨迹自适应算法进行仿真实验,并验证了该算法的可行性.
步态训练轨迹是影响康复训练效果的一项重要因素,而自适应性对于下肢康复机器人的临床应用具有重要的意义.振荡器可通过在线调节参数而输出不同波形的周期信号,常用于康复机器人步态轨迹的生成.本文在高斯核函数非线性振荡器的基础上提出了一种下肢康复机器人步态轨迹自适应算法.该算法通过轨迹偏差实现对参考轨迹波形的调节,并且用相位偏差曲线面积实现参考轨迹周期的自适应.本文首先介绍了用于生成步态参考轨迹的非线性振荡器的数学模型;其次,详细描述了基于该模型的参考轨迹波形和周期自适应算法;最后,以悬挂减重式下肢康复机器人为研究对象,建立机器人与人体下肢仿真模型,对所提出的步态参考轨迹自适应算法进行仿真实验,并验证了该算法的可行性.