

-
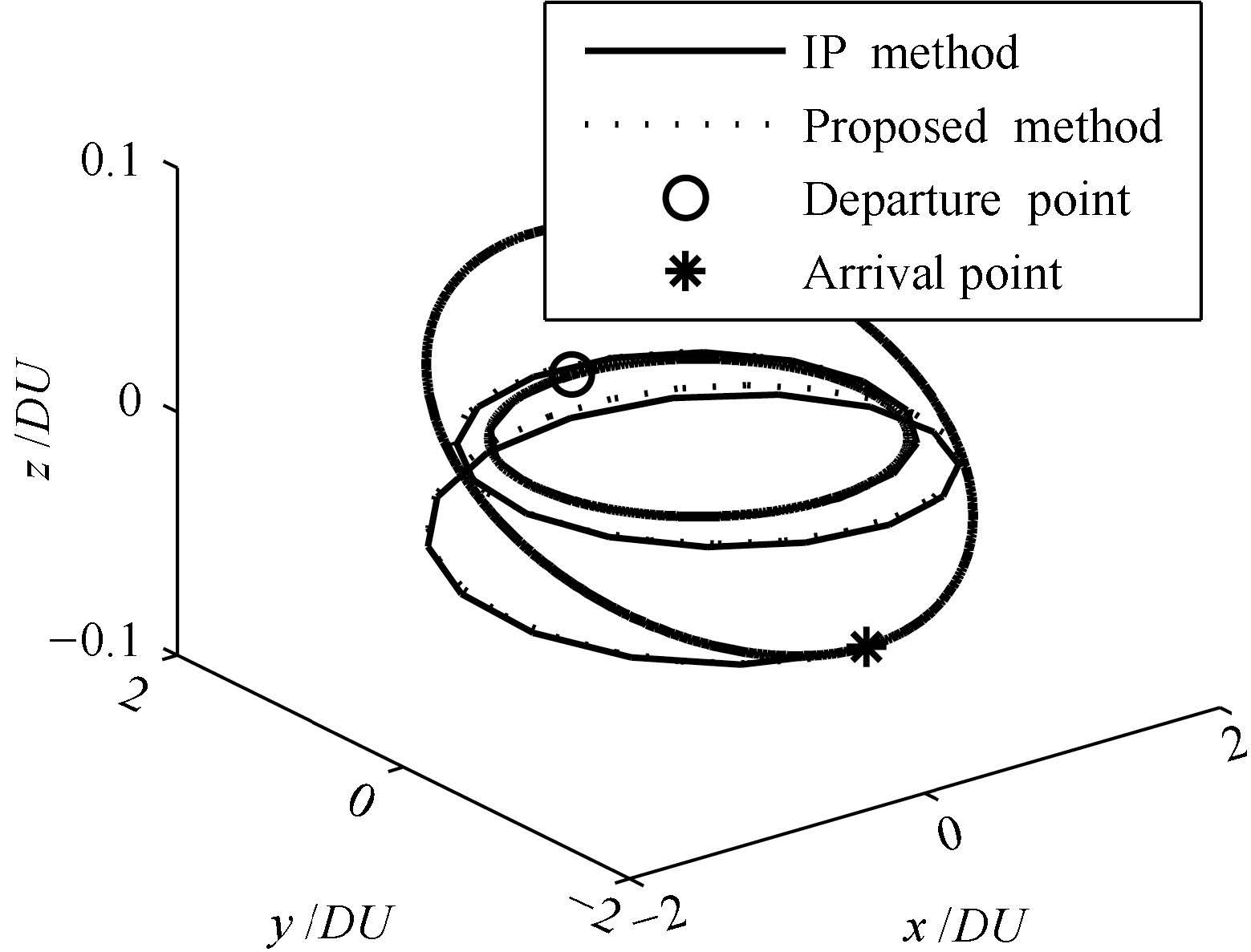
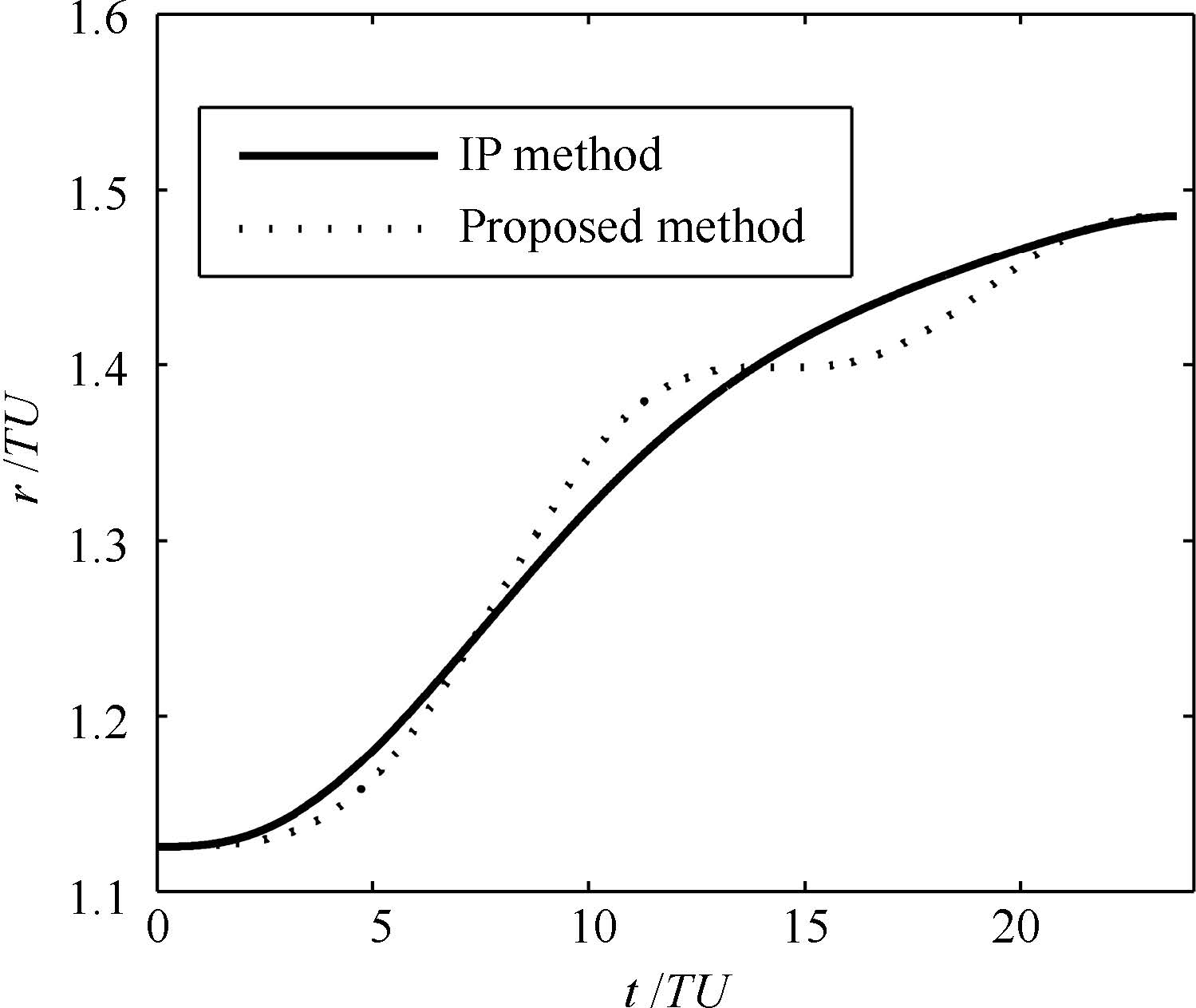
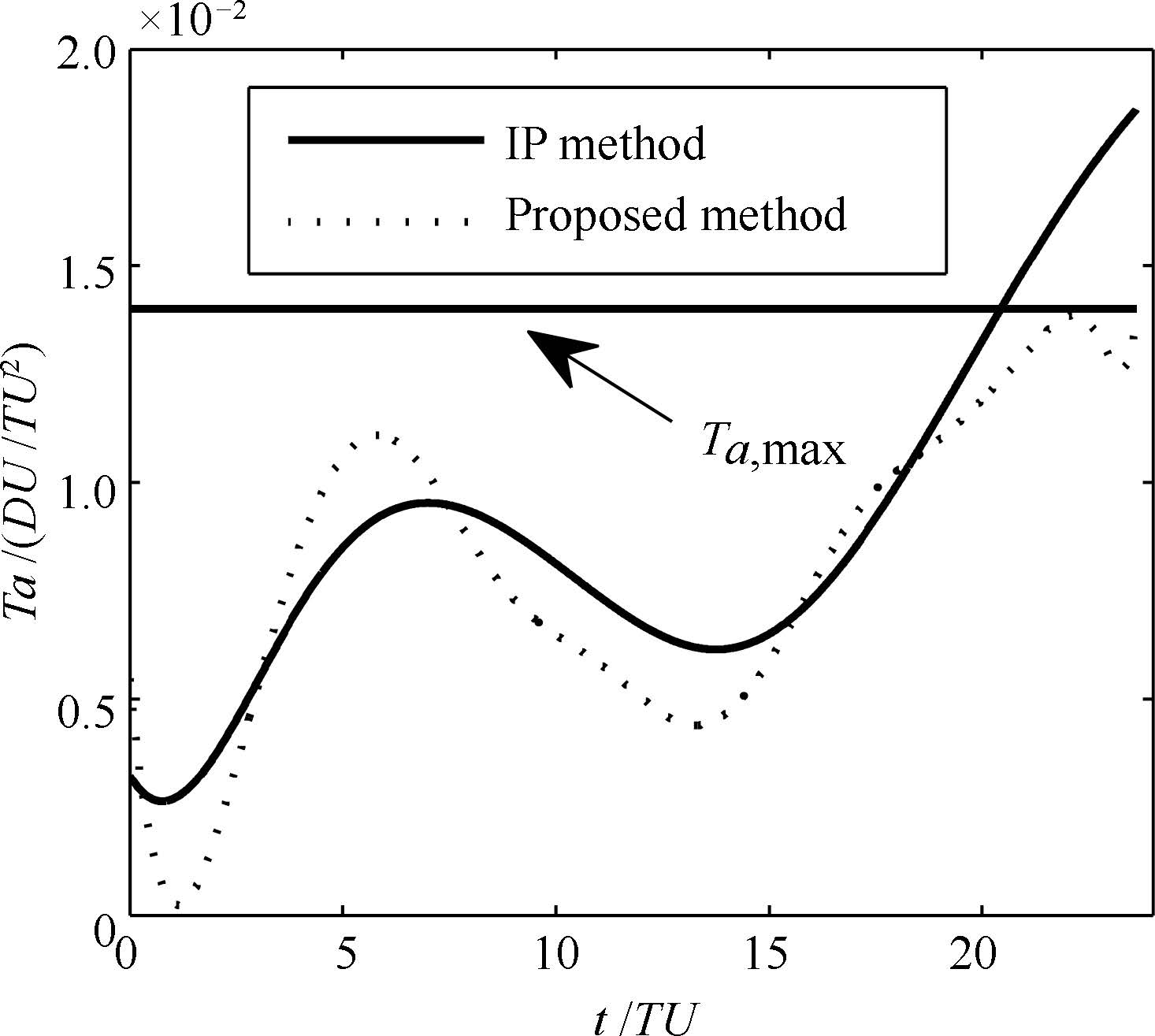
摘要: 为了满足小推力航天器交会轨迹的快速性设计需求,基于形状逼近理论,设计了一种三维轨迹模型.将轨迹设计问题转换为求解傅里叶级数的系数问题,避免了轨迹运动方程非线性强、难以求解的难题,极大地提高了计算效率.考虑到推力加速度的限制,建立了加速度约束方程,并结合轨迹的运动方程,给出了傅里叶级数的求解过程.同时根据边界条件和最大推力加速度值,定性地分析了傅里叶系数的存在条件.仿真验证了该方法的正确性和可行性,并从计算效率上与高斯伪谱法进行了对比,结果表明本文的方法计算耗时仅为高斯伪谱法的0.67%.Abstract: Trajectory design with low-thrust propulsion needs a method for quickly approximating the spacecraft's trajectory during the preliminary stage phase. To address this requirement, a 3D rendezvous trajectory design model is proposed based on the shape-based theory, by which the trajectory design problem is simplified into solving the coefficients of Fourier series. In the process of solving coefficients, thrust constraint is considered, and the existence conditions of the coefficients are qualitatively analyzed. Finally, the correctness and feasibility of this approach are verified through a numerical example. Results show that the proposed method can not only satisfy the boundary conditions and thrust constraint, but also has a good computational efficiency. Its computation time is only 0.67% of that of the Gauss pseudospectral method.
-
Key words:
- Quickly approximating /
- low-thrust /
- trajectory design /
- thrust constraint /
- Fourier serious /
- spacecraft
-
表 1 输入状态参数
Table 1 Input boundary parameters
参数 a e i $\omega $ $\Omega $ f 初始状态7 178.1km 0 0± 70± 20± 0± 末端状态9 378.1km 0.01 2± 90± 0± 180±  下载: 导出CSV
下载: 导出CSV
表 2 q取不同值时的仿真结果
Table 2 Results with different q
q ${{\vartriangle }_{v}}$(DU=TU) Tmax(DU=TU2) ${{\vartriangle }_{t}}$(s) 5 0.2453 0.0141 52.5338 7 0.2221 0.0140 4.8387 9 0.2016 0.0140 0.4418 13 0.1969 0.0138 0.4245 17 0.1862 0.0139 0.3718 21 0.2101 0.0140 13.2845 25 0.2269 0.0140 193.4338 27 0.2972 0.0141 239.1416
下载: 导出CSV
表 3 $DP$取不同值时的仿真结果
Table 3 Results with different $DP$
$DP\cdot 2\pi /{{\theta }_{f}}$ ${{\vartriangle }_{v}}$(DU=TU) Tmax(DU=TU2) ${{\vartriangle }_{t}}$(s) 6 0.2088 0.0140 19.6138 10 0.2011 0.0139 0.5181 20 0.2010 0.0140 3.1638 30 0.2012 0.0138 3.6007 40 0.2005 0.0140 10.7402 60 0.2003 0.0140 15.2663 80 0.2002 0.0140 36.1296 90 0.2002 0.0140 47.4839
下载: 导出CSV
表 4 ${n_r},{n_\theta }$取不同值时的仿真结果
Table 4 Results with different ${n_r}$ and ${n_\theta }$
nr=${{n}_{\theta }}$ ${{\vartriangle }_{v}}$(DU=TU) Tmax(DU=TU2) ${{\vartriangle }_{t}}$(s) 3 0.2773 0.0140 39.1008 4 1.9671 0.0140 3.6494 5 0.2117 0.0139 6.0813 6 0.2013 0.0136 3.8057 8 0.1974 0.0132 25.8237 10 0.1902 0.0132 45.5559
下载: 导出CSV
表 5 三种方法计算结果比较
Table 5 Comparison of the results using three methods
方法 ${{\vartriangle }_{v}}$(DU=TU) Tmax(DU=TU2) ${{\vartriangle }_{t}}$(s) 本文的方法 0.1894 0.0139 0.4130 逆多项式法 0.2093 0.0186 0.1341 高斯伪谱法 0.1849 0.0140 61.901
下载: 导出CSV
-
[1] Laipert F E,Longuski J M.Low-thrust trajectories for human missions to Ceres.Acta Astronautica,2014,95:124-132 doi: 10.1016/j.actaastro.2013.11.003 [2] Graham K F,Rao A V.Minimum-time trajectory optimization of multiple revolution low-thrust earth-orbit transfers.Journal of Spacecraft and Rockets,2015,52(3):711-727 doi: 10.2514/1.A33187 [3] Sun C,Yuan J P,Fang Q.Continuous low thrust trajectory optimization for preliminary design.Proceedings of the Institution of Mechanical Engineers.Part G:Journal of Aerospace Engineering,2016,230(5):921-933 [4] Topputo F,Zhang C.Survey of direct transcription for low-thrust space trajectory optimization with applications.Abstract and Applied Analysis,2014,2014:851720,DOI: 10.1155/2014/851720 [5] Petropoulos A E,Longuski J M,Vinh N X.Shape-based analytic representations of low-thrust trajectories for gravity-assist applications.In:Proceedings of the 2000 Advances in Astronautical Sciences.Girdwood,USA:AAS,2000.563-581 [6] Petropoulos A E,Longuski J M.Shape-based algorithm for the automated design of low-thrust,gravity assist trajectories.Journal of Spacecraft and Rockets,2004,41(5):787-796 doi: 10.2514/1.13095 [7] Izzo D.Lambert's problem for exponential sinusoids.Journal of Guidance,Control,and Dynamics,2006,29(5):1242-1245 doi: 10.2514/1.21796 [8] Wall B J,Conway B A.Shape-based approach to low-thrust rendezvous trajectory design.Journal of Guidance,Control,and Dynamics,2009,32(1):95-101 doi: 10.2514/1.36848 [9] Wall B J.Shape-based approximation method for low-thrust trajectory optimization.In:Proceedings of the 2008 AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Honolulu,Hawaii:AIAA,2008. [10] Taheri E,Abdelkhalik O.Shape based approximation of constrained low-thrust space trajectories using Fourier series.Journal of Spacecraft and Rockets,2012,49(3):535-546 http://cn.bing.com/academic/profile?id=2154522750&encoded=0&v=paper_preview&mkt=zh-cn [11] Taheri E,Abdelkhalik O.Initial three-dimensional low-thrust trajectory design.Advances in Space Research,2016,57(3):889-903 doi: 10.1016/j.asr.2015.11.034 [12] Gondelach D J,Noomen R.Hodographic-shaping method for low-thrust interplanetary trajectory design.Journal of Spacecraft and Rockets,2015,52(3):728-738 doi: 10.2514/1.A32991 -

 下载:
下载:



计量
- 文章访问数: 1723
- HTML全文浏览量: 237
- PDF下载量: 864
- 被引次数: 0
