

-
摘要: 考虑约束非线性系统,提出一种新的具有稳定性保证的经济模型预测控制(Economic model predictive control,EMPC)策略.由于经济性能指标的非凸性和非正定性,引入关于经济最优平衡点的正定辅助函数.利用辅助函数的最优值函数定义原始EMPC优化问题的稳定性约束.应用终端约束集、终端代价函数和局部控制器三要素,建立闭环系统关于经济最优平衡点的渐近稳定性和渐近平均性能.进一步,结合多目标理想点概念,将提出的控制策略用于多个经济性能指标的优化控制,得到稳定多目标EMPC策略.最后,以连续搅拌反应器为例,比较仿真结果验证本文策略的有效性.Abstract: This paper proposes a novelty economic model predictive control (EMPC) scheme with guaranteed stability for constrained nonlinear systems. Some auxiliary positive-definite functions at economy optimal equilibrium points are introduced for economic performance functions that are generally non-convex and non-positive-definite. The optimal value function of the auxiliary function is used to define an adjustable stability constraint which is imposed on the original EMPC optimization problem. By the triplet of terminal constrained sets, terminal penalty functions and local controllers, it is proved that the closed-loop system is asymptotically stable at the economically optimal equilibrium point and has an asymptotic average performance. Moreover, the proposed EMPC scheme is extended to optimization control of multiple economic performance functions, together with the concept of multi-objective utopia points. Then a stabilizing multi-objective EMPC scheme is presented. Finally, the effectiveness of the obtained results is illustrated by a simulation example of a continuously stirred tank reactor.
-
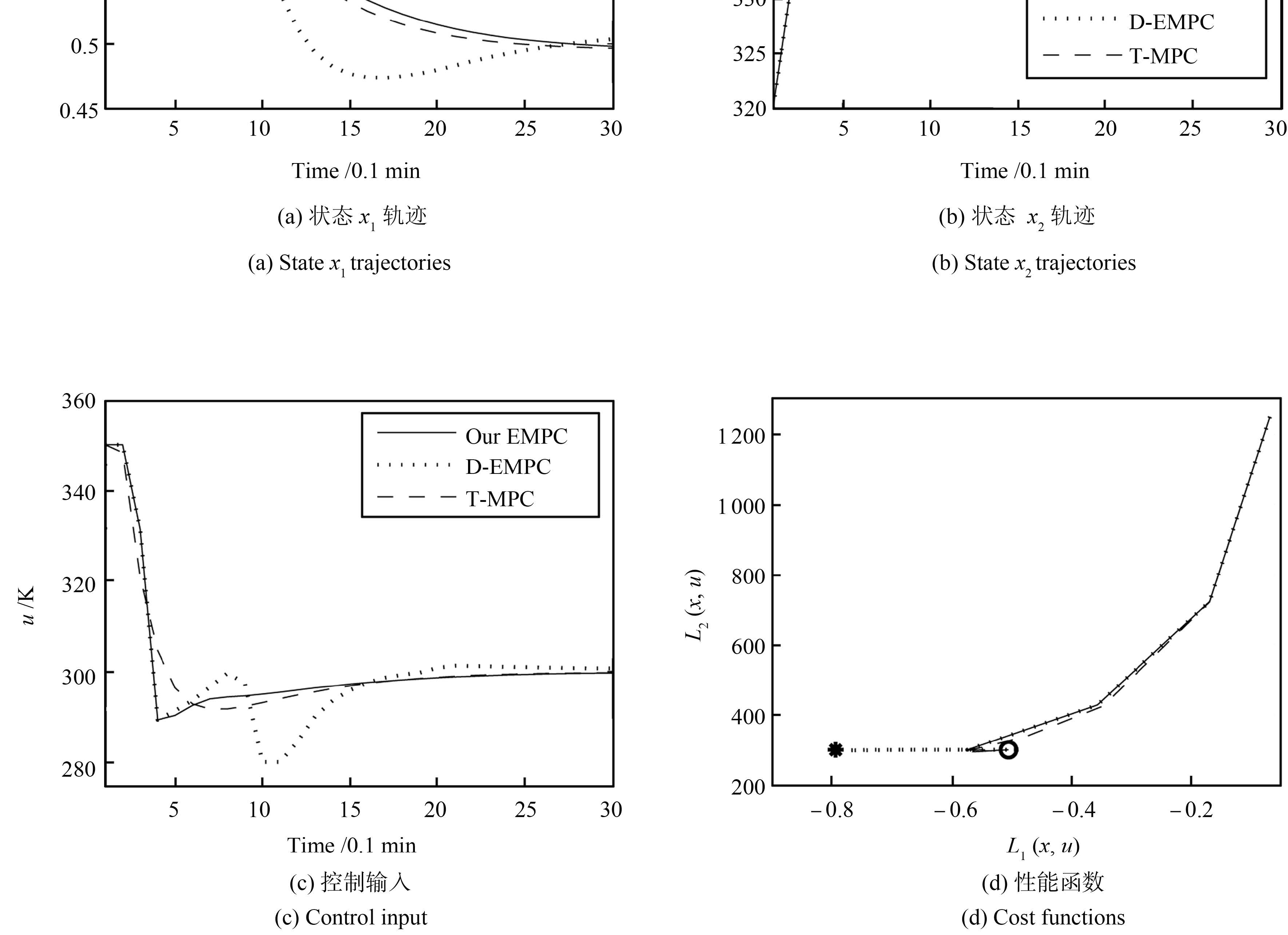
表 1 渐近平均性能
Table 1 Asymptotic average performance
Our EMPC D-EMPC T-MPC Av{L1} -0.502 2 -0.494 7 -0.503 1 Av{L2} 314.579 7 315.660 2 314.801 2  下载: 导出CSV
下载: 导出CSV
-
[1] Ellis M, Durand H, Christofides P D. A tutorial review of economic model predictive control methods. Journal of Process Control, 2014, 24(8): 1156-1178 doi: 10.1016/j.jprocont.2014.03.010 [2] Tran T, Ling K V, Maciejowski J M. Economic model predictive control—a review. In: Proceedings of the 31st International Symposium on Automation and Robotics in Construction. Sydney, Australia: IAARC, 2014. 35-42 http://cn.bing.com/academic/profile?id=63511440&encoded=0&v=paper_preview&mkt=zh-cn [3] Mayne D Q. Model predictive control: recent developments and future promise. Automatica, 2014, 50(12): 2967-2986 doi: 10.1016/j.automatica.2014.10.128 [4] Angeli D, Amrit R, Rawlings J B. On average performance and stability of economic model predictive control. IEEE Transactions on Automatic Control, 2012, 57(7): 1615-1626 doi: 10.1109/TAC.2011.2179349 [5] Diehl M, Amrit R, Rawlings J B. A Lyapunov function for economic optimizing model predictive control. IEEE Transactions on Automatic Control, 2011, 56(3): 703-707 doi: 10.1109/TAC.2010.2101291 [6] Amrit R, Rawlings J B, Angeli D. Economic optimization using model predictive control with a terminal cost. Annual Reviews in Control, 2011, 35(2): 178-186 doi: 10.1016/j.arcontrol.2011.10.011 [7] Fagiano L, Teel A R. Generalized terminal state constraint for model predictive control. Automatica, 2013, 49(9): 2622-2631 doi: 10.1016/j.automatica.2013.05.019 [8] Ferramosca A, Limon D, Camacho E F. Economic MPC for a changing economic criterion for linear systems. IEEE Transactions on Automatic Control, 2014, 59(10): 2657-2667 doi: 10.1109/TAC.2014.2326013 [9] Huang R, Harinath E, Biegler L T. Lyapunov stability of economically oriented NMPC for cyclic processes. Journal of Process Control, 2011, 21(4): 501-509 doi: 10.1016/j.jprocont.2011.01.012 [10] Chu B, Duncan S, Papachristodoulou A, Hepburn C. Using economic model predictive control to design sustainable policies for mitigating climate change. In: Proceedings of the 51st IEEE Conference on Decision and Control. Maui, HI: IEEE, 2012. 406-411 http://www.baidu.com/link?url=Q9pZ5IqS_2eX5IwlAVHnaVkTRM8YtBqb4tx6drS7OfZAUUnxze3E6wQ9u43dvmfBG0BXpod-1-FN2Z7yYbNeJgrHAQmP8pc31IBf9ANLa_neOSbz3H8jcaLQf7h2A5EPWH1XCl-ULNKhWCYSM3gsyy6mPcgkEZ6AoTbF1phUBbWMadsfeB48JB4ZefgEXAxxPqKGjphq0brMDv81JYa0SK66mreculAtKZV9I7wQpUU0p-xceDjnORuG_yRPeE94kJhItStYlBXKIpfN_-tq-Bb__02iGXudTynpuX9YpvncsncQXMWbdzxE9IT3fDowvAOt8BDTvb8XwwMqdZdrAde6igKz5mwqxt0UPvxxhm88VIp8AkOS836Q8SuOMBsO&wd=&eqid=cd1ed0a50003632500000005583947c6 [11] Hovgaard T G, Larsen L F S, Jorgensen J B. Flexible and cost efficient power consumption using economic MPC a supermarket refrigeration benchmark. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, FL: IEEE, 2011. 848-854 http://cn.bing.com/academic/profile?id=2090988566&encoded=0&v=paper_preview&mkt=zh-cn [12] Ma W J, Gupta V. Desynchronization of thermally-coupled first-order systems using economic model predictive control. In: Proceedings of the 51st IEEE Conference on Decision and Control. Maui, HI: IEEE, 2012. 278-283 http://www.baidu.com/link?url=OuSh295l3gnD3knZWkVPbsxRsuefUw0CXnPC4bPQ7wZYrmrsZzvUJlqYEzycRcfLG6963ZBEBTlCEzQ77nO5cEv34o_P50wk4kdLV9CSX-3oQpDUI9V3laePf9gJYhiNUuoqQ79aWuDQAJLcdhQ7riBnYQ-9YclPLBnZLujiHrCtZrWmumLZ0SVGaw0IYDd8nn_VU3AwQFcuKGkGArdAaYZoTgJQxIqndH25H2dXveVl7V-YtVVBMVji7QcCEfJsvlg-GTud3WpLhnT94YsTBTd7drpChVDpOBlJXKUCiW1_Q_vbh89nIflJisMcmQ2M2ZuchFknN4rC4unbYhFhkUK4-hUHEkGT8YDMXkgY0_FgYx6-eLteLp0hlMBARNaL&wd=&eqid=cd1ed0a5000368cb00000005583947eb [13] Lao L F, Ellis M, Christofides P D. Economic model predictive control of parabolic PDE systems: addressing state estimation and computational efficiency. Journal of Process Control, 2014, 24(4): 448-462 doi: 10.1016/j.jprocont.2014.01.007 [14] Lao L F, Ellis M, Christofides P D. Smart manufacturing: handling preventive actuator maintenance and economics using model predictive control. AIChE Journal, 2014, 60(6): 2179-2196 doi: 10.1002/aic.14427 [15] Lao L F, Ellis M, Christofides P D. Economic model predictive control of transport-reaction processes. Industrial & Engineering Chemistry Research, 2014, 53(18): 7382-7396 http://cn.bing.com/academic/profile?id=2327846973&encoded=0&v=paper_preview&mkt=zh-cn [16] Müller MA, Angeli D, Allgöwer F, Amrit R, Rawlings J B. Convergence in economic model predictive control with average constraints. Automatica, 2014, 50(12): 3100-3111 doi: 10.1016/j.automatica.2014.10.059 [17] Rawlings J B, Angeli D, Bates C N. Fundamentals of economic model predictive control. In: Proceedings of the 51st IEEE Conference on Decision and Control. Maui, HI: IEEE, 2012. 3851-3861 http://cn.bing.com/academic/profile?id=2069581154&encoded=0&v=paper_preview&mkt=zh-cn [18] Grüne L. Economic receding horizon control without terminal constraints. Automatica, 2013, 49(3): 725-734 doi: 10.1016/j.automatica.2012.12.003 [19] Heidarinejad M, Liu J F, Christofides P D. Economic model predictive control of nonlinear process systems using Lyapunov techniques. AIChE Journal, 2012, 58(3): 855-870 doi: 10.1002/aic.v58.3 [20] Ellis M, Christofides P D. On finite-time and infinite-time cost improvement of economic model predictive control for nonlinear systems. Automatica, 2014, 50(10): 2561-2569 doi: 10.1016/j.automatica.2014.08.011 [21] Maree J P, Imsland L. On multi-objective economic predictive control of cyclic process operation. Journal of Process Control, 2014, 24(8): 1328-1336 doi: 10.1016/j.jprocont.2014.05.011 [22] Vallerio M, van Impe J, Logist F. Tuning of NMPC controllers via multi-objective optimisation. Computers and Chemical Engineering, 2014, 61(11): 38-50 http://cn.bing.com/academic/profile?id=2093839143&encoded=0&v=paper_preview&mkt=zh-cn [23] 潘红光, 高海南, 孙耀, 张英, 丁宝苍. 基于多优先级稳态优化的双层结构预测控制算法及软件实现. 自动化学报, 2014, 40(3): 405-414 http://www.aas.net.cn/CN/abstract/abstract18305.shtmlPan Hong-Guang, Gao Hai-Nan, Sun Yao, Zhang Ying, Ding Bao-Cang. The algorithm and software implementation for double-layered model predictive control based on multi-priority rank steady-state optimization. Acta Automatica Sinica, 2014, 40(3): 405-414 http://www.aas.net.cn/CN/abstract/abstract18305.shtml [24] Bemporad A, de la Peña D M. Multiobjective model predictive control. Automatica, 2009, 45(12): 2823-2830 doi: 10.1016/j.automatica.2009.09.032 [25] 邹涛, 王昕, 李少远. 基于混合逻辑的非线性系统多模型预测控制. 自动化学报, 2007, 33(2): 188-192 doi: 10.1360/aas-007-0188Zou Tao, Wang Xi, Li Shao-Yuan. Multi-model predictive control for nonlinear systems based on mixed logic. Acta Automatica Sinica, 2007, 33(2): 188-192 doi: 10.1360/aas-007-0188 [26] Wang H Y, Huang D X, Jin Y H. A hybrid model predictive control for handling infeasibility and constraint prioritization. Chinese Journal of Chemical Engineering, 2005, 13(2): 211-217 [27] Tyler M L, Morari M. Propositional logic in control and monitoring problems. Automatica, 1999, 35(4): 565-582 doi: 10.1016/S0005-1098(98)00198-8 [28] 何德峰, 宋秀兰, 黄骅. 优先级多目标稳定化约束模型预测控制. 控制与决策, 2013, 28(12): 1831-1836 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201312012.htmHe De-Feng, Song Xiu-Lan, Huang Hua. Stabilizing constrained model predictive control with prioritized multi-objectives. Control and Decision, 2013, 28(12): 1831-1836 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201312012.htm [29] He D F, Wang L, Sun J. On stability of multiobjective NMPC with objective prioritization. Automatica, 2015, 57: 189-198 doi: 10.1016/j.automatica.2015.04.024 [30] Ocampo-Martinez C, Ingimundarson A, Puig V, Quevedo J. Objective prioritization using lexicographic minimizers for MPC of sewer networks. IEEE Transactions on Control Systems Technology, 2008, 16(1): 113-121 doi: 10.1109/TCST.2007.899741 [31] Zavala V M, Flores-Tlacuahuac A. Stability of multiobjective predictive control: a utopia-tracking approach. Automatica, 2012, 48(10): 2627-2632 doi: 10.1016/j.automatica.2012.06.066 [32] He D F, Wang L, Yu L. Multi-objective nonlinear predictive control of process systems: a dual-mode tracking control approach. Journal of Process Control, 2015, 25(3): 142-151 http://cn.bing.com/academic/profile?id=1984594511&encoded=0&v=paper_preview&mkt=zh-cn [33] Chen H, Allgöwer F. A quasi-infinite horizon nonlinear model predictive control scheme with guaranteed stability. Automatica, 1998, 34(10): 1205-1217 doi: 10.1016/S0005-1098(98)00073-9 [34] 于树友, 陈虹, 张鹏, 李学军. 一种基于LMI的非线性模型预测控制终端域优化方法. 自动化学报, 2008, 34(7): 798-804 http://www.aas.net.cn/CN/abstract/abstract17945.shtmlYu Shu-You, Chen Hong, Zhang Peng, Li Xue-Jun. An LMI optimization approach for enlarging the terminal region of MPC for nonlinear systems. Acta Automatica Sinica, 2008, 34(7): 798-804 http://www.aas.net.cn/CN/abstract/abstract17945.shtml [35] He D F, Yu L, Song X L. Optimized-based stabilization of constrained nonlinear systems: a receding horizon approach. Asian Journal of Control, 2014, 16(6): 1693-1701 doi: 10.1002/asjc.v16.6 [36] 席裕庚, 李德伟. 预测控制定性综合理论的基本思路和研究现状. 自动化学报, 2008, 34(10): 1225-1234 http://www.aas.net.cn/CN/abstract/abstract17992.shtmlXi Yu-Geng, Li De-Wei. Fundamental philosophy and status of qualitative synthesis of model predictive control. Acta Automatica Sinica, 2008, 34(10): 1225-1234 http://www.aas.net.cn/CN/abstract/abstract17992.shtml [37] 何德峰, 丁宝苍, 于树友. 非线性系统模型预测控制若干基本特点与主题回顾. 控制理论与应用, 2013, 30(3): 273-287 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201303002.htmHe De-Feng, Ding Bao-Cang, Yu Shu-You. Review of fundamental properties and topics of model predictive control for nonlinear systems. Control Theory and Applications, 2013, 30(3): 273-287 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201303002.htm [38] Mhaskar P, El-Farra N H, Christofides P D. Stabilization of nonlinear systems with state and control constraints using Lyapunov-based predictive control. System & Control Letters, 2006, 55(8): 650-659 http://cn.bing.com/academic/profile?id=2133289369&encoded=0&v=paper_preview&mkt=zh-cn [39] 徐玖平, 李军. 多目标决策的理论与方法. 北京: 清华大学出版社, 2005.Xu Jiu-Ping, Li Jun. Multiple Objective Decision Making Theory and Methods. Beijing: Tsinghua University Press, 2005. -

 下载:
下载:




图(4) / 表(1)
计量
- 文章访问数: 3142
- HTML全文浏览量: 549
- PDF下载量: 1172
- 被引次数: 0
