2022年 第48卷 第8期
2022, 48(8): 1869-1889.
doi: 10.16383/j.aas.c210263
摘要:
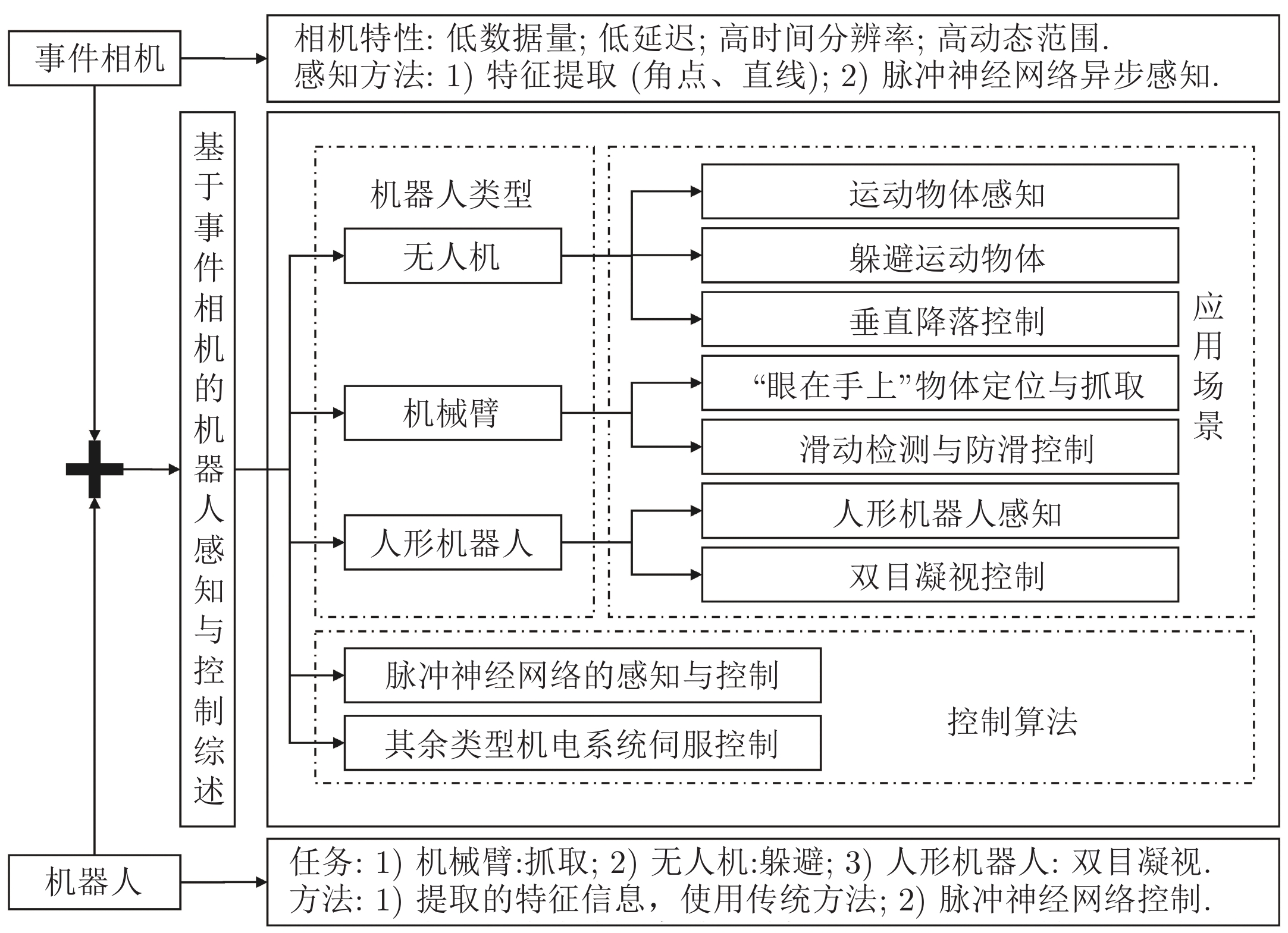
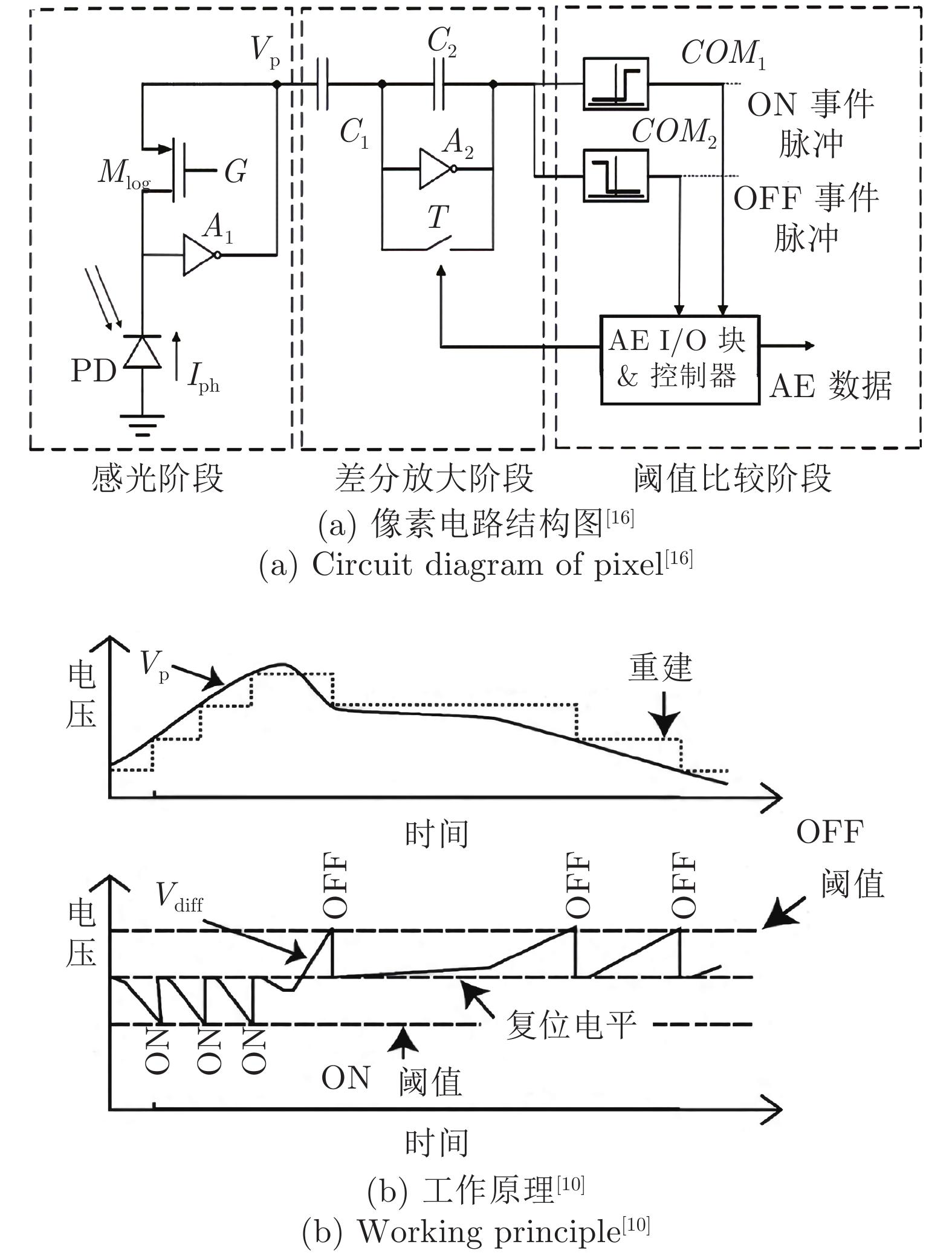
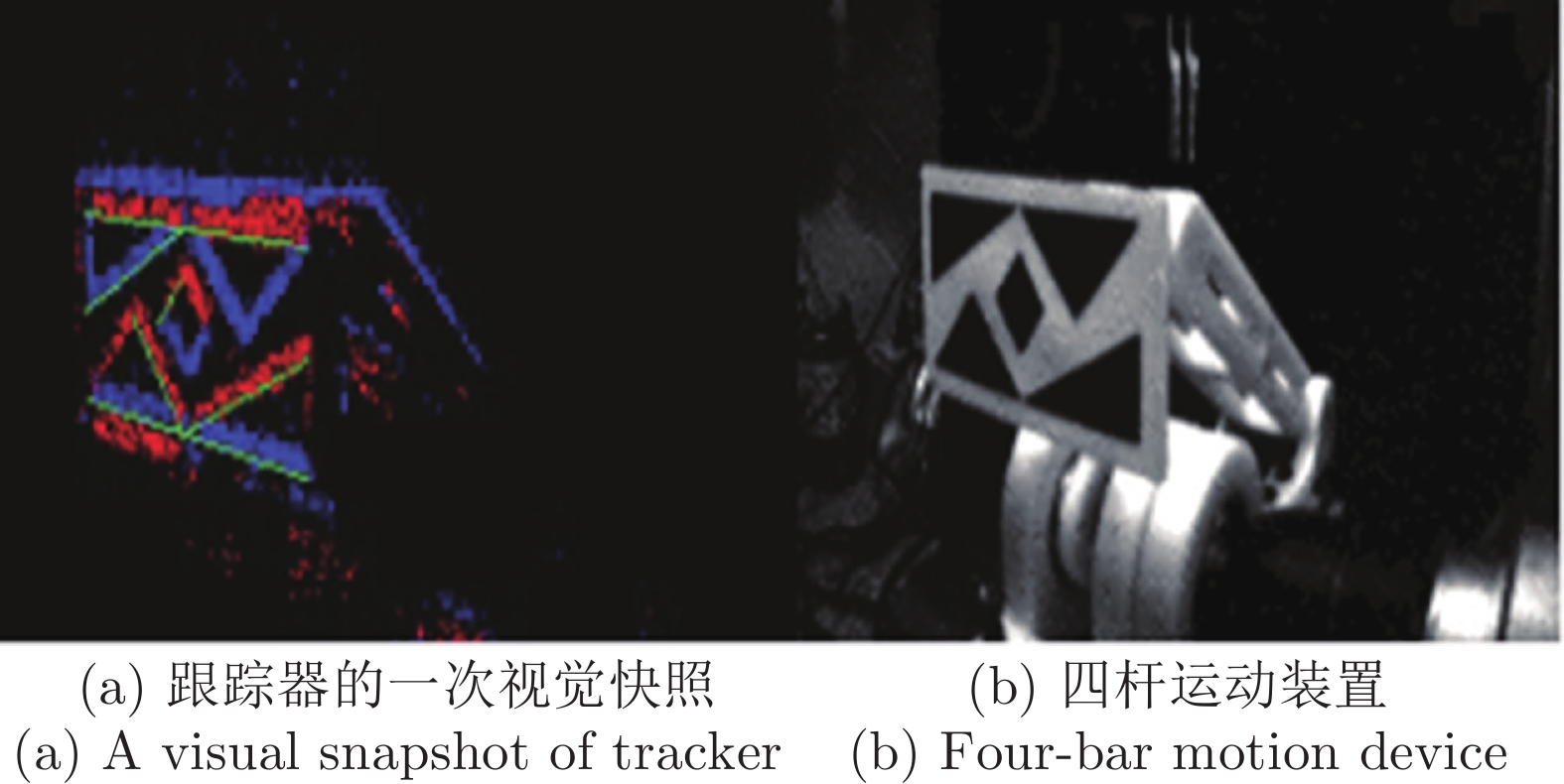
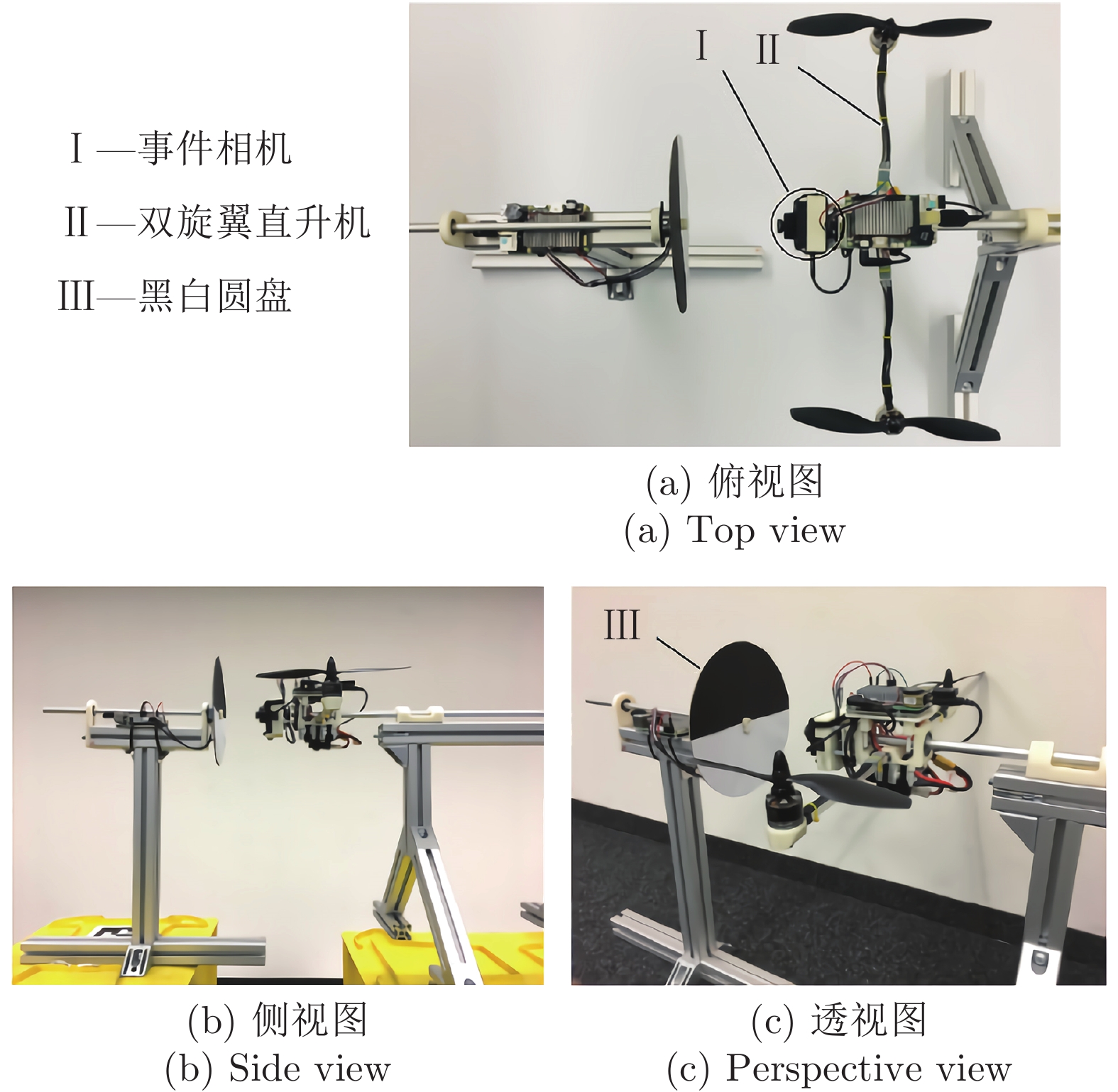
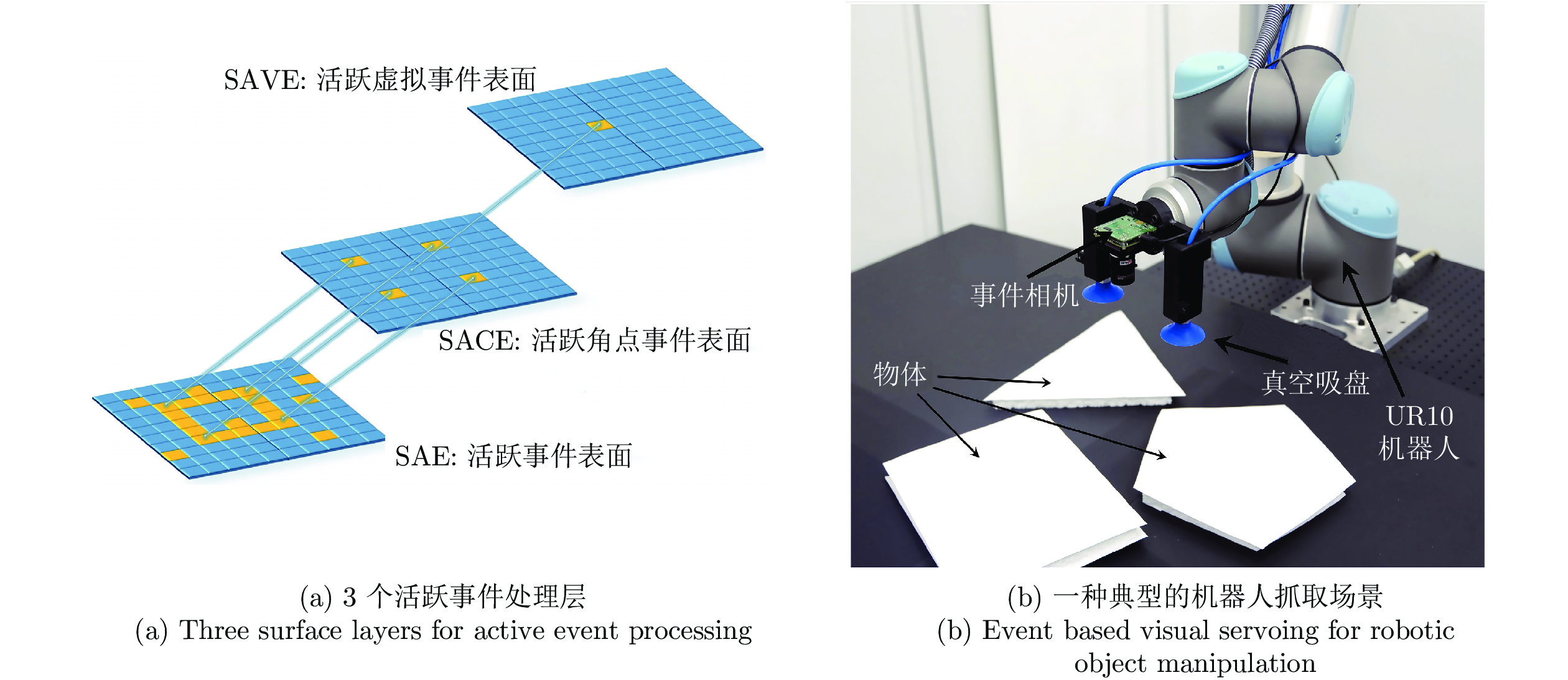
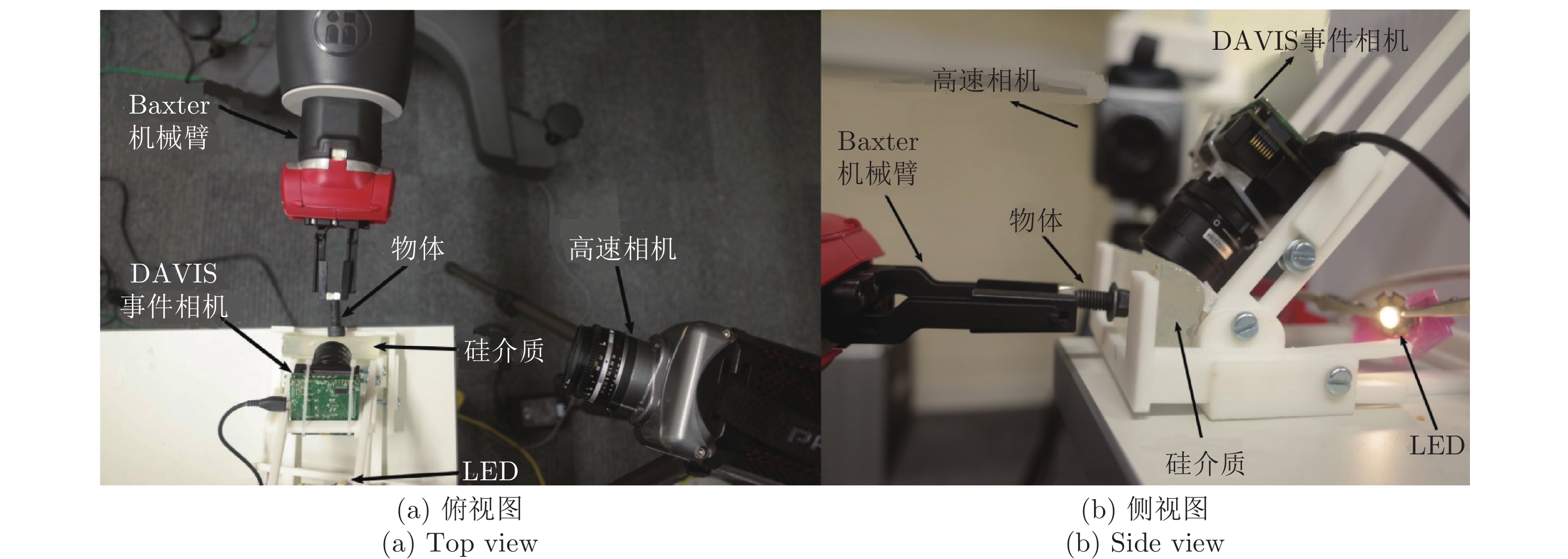
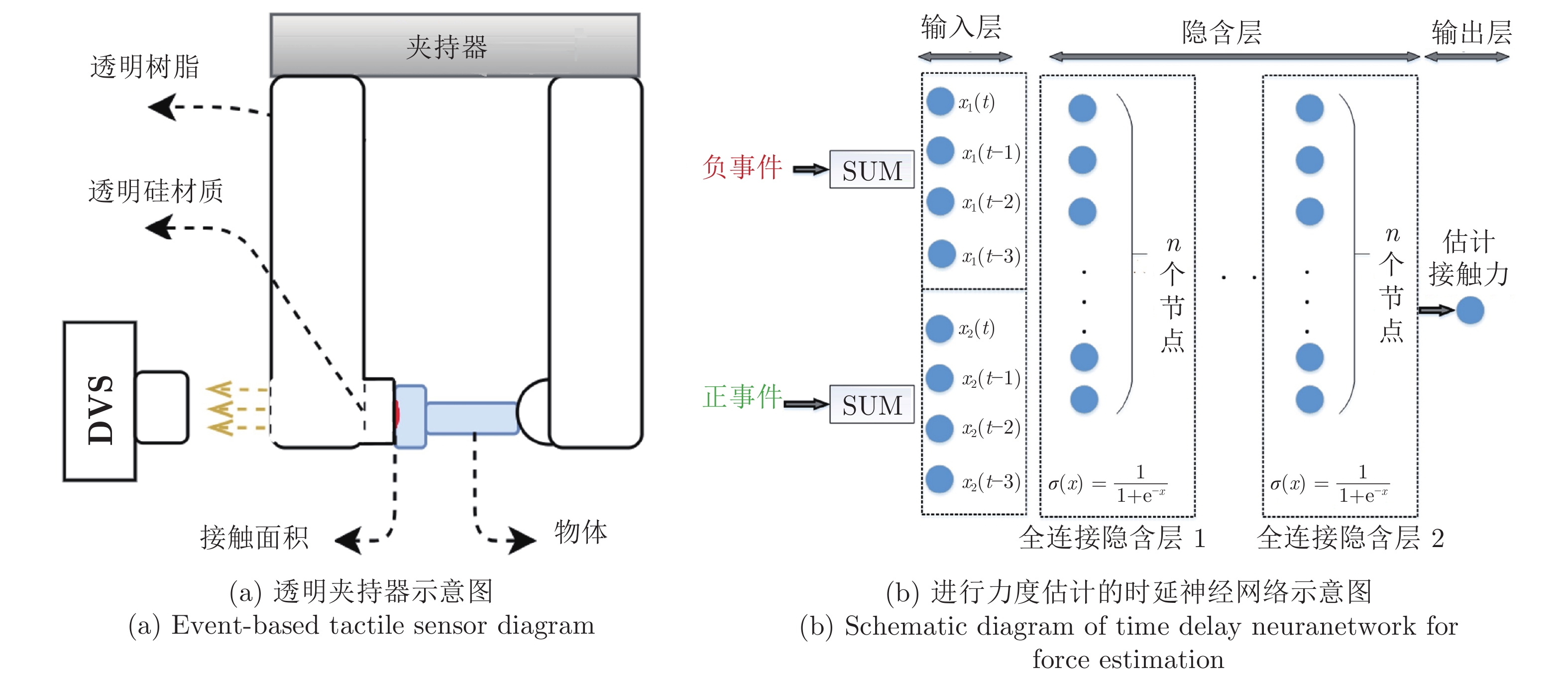
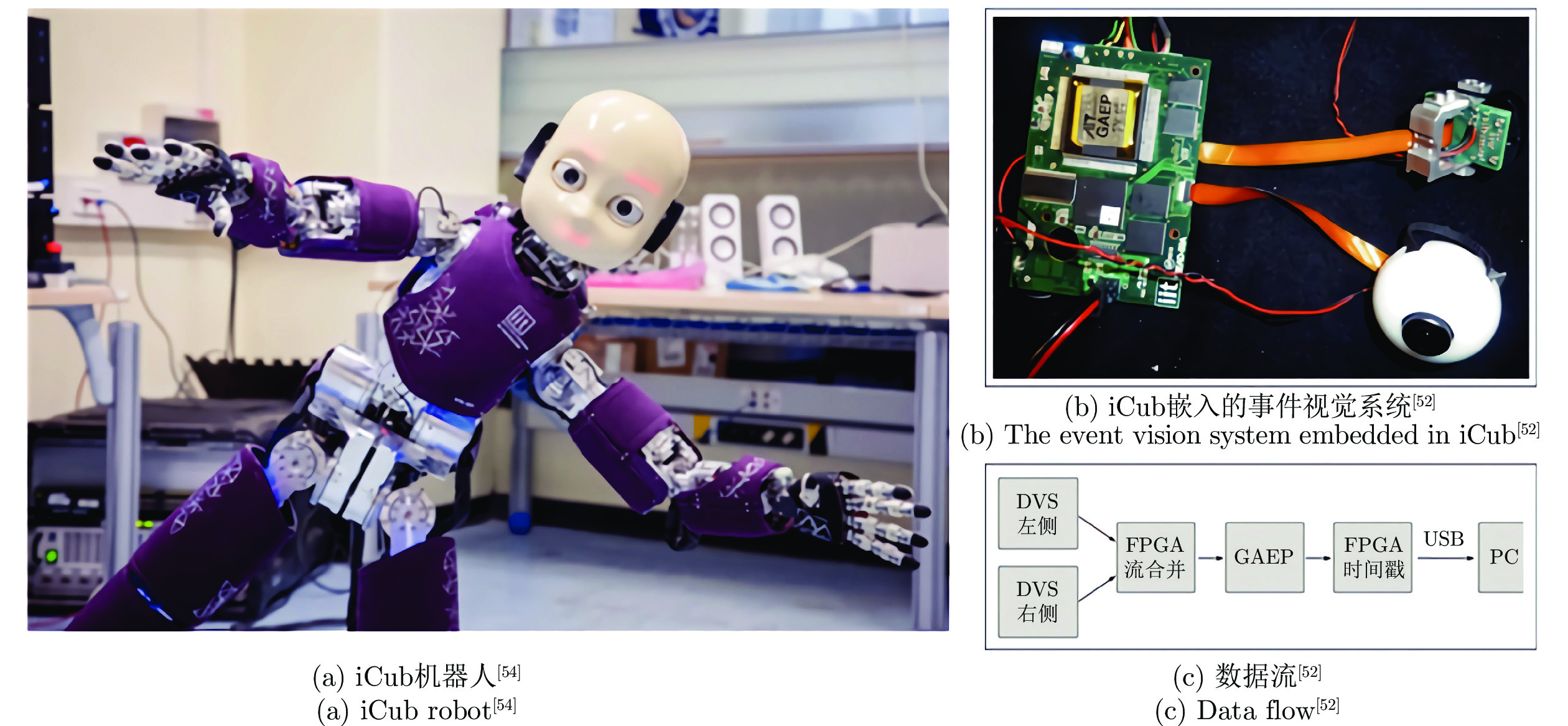
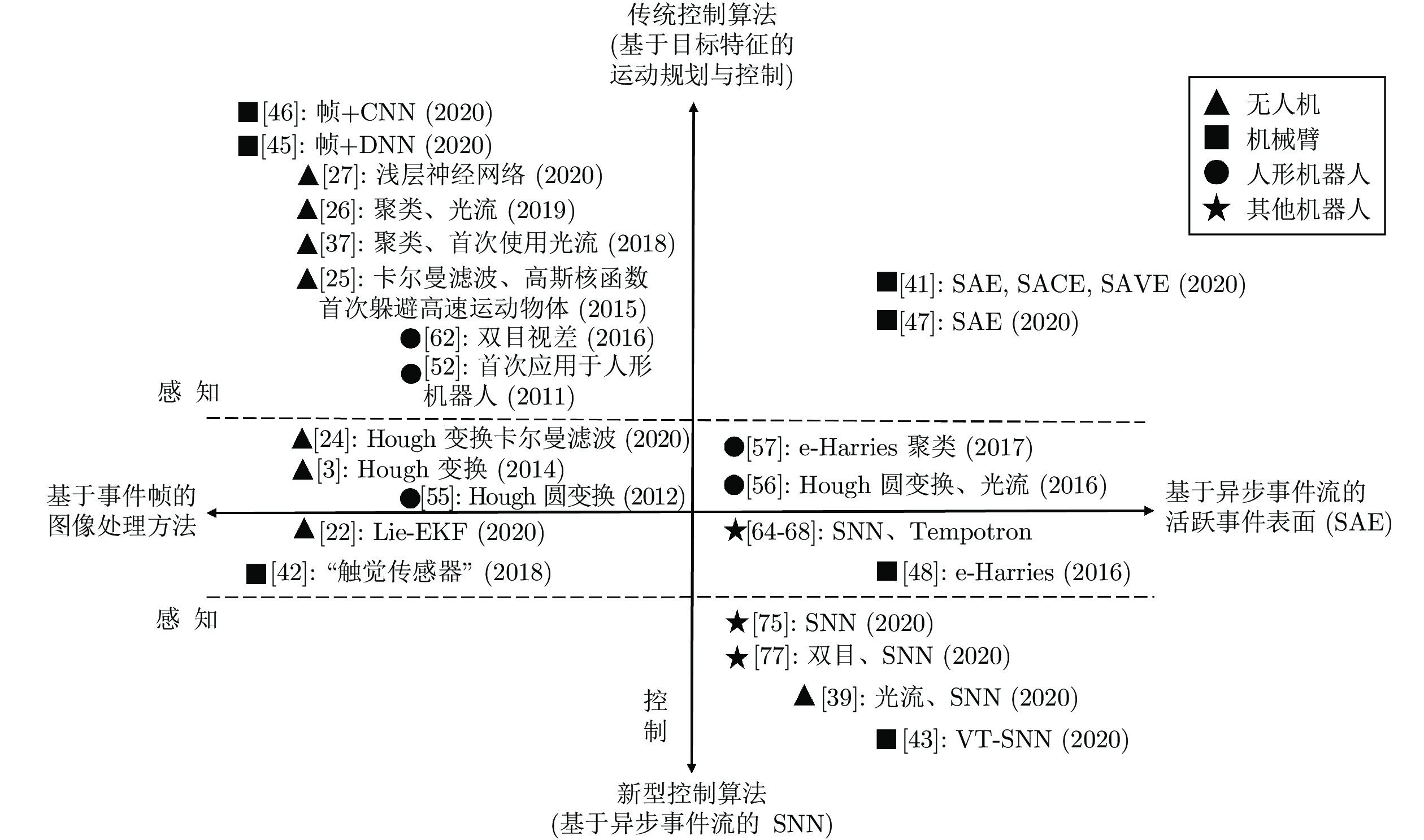
事件相机作为一种新型动态视觉传感器, 通过各个像素点独立检测光照强度变化并异步输出“事件流”信号, 具有数据量小、延迟低、动态范围高等优秀特性, 给机器人控制带来新的可能. 本文主要介绍了近年来涌现的一系列事件相机与无人机、机械臂和人形机器人等机器人感知与运动控制结合的研究成果, 同时聚焦基于事件相机的控制新方法、新原理以及控制效果, 并指出基于事件相机的机器人控制的应用前景和发展趋势.
事件相机作为一种新型动态视觉传感器, 通过各个像素点独立检测光照强度变化并异步输出“事件流”信号, 具有数据量小、延迟低、动态范围高等优秀特性, 给机器人控制带来新的可能. 本文主要介绍了近年来涌现的一系列事件相机与无人机、机械臂和人形机器人等机器人感知与运动控制结合的研究成果, 同时聚焦基于事件相机的控制新方法、新原理以及控制效果, 并指出基于事件相机的机器人控制的应用前景和发展趋势.





2022, 48(8): 1890-1920.
doi: 10.16383/j.aas.c200554
摘要:
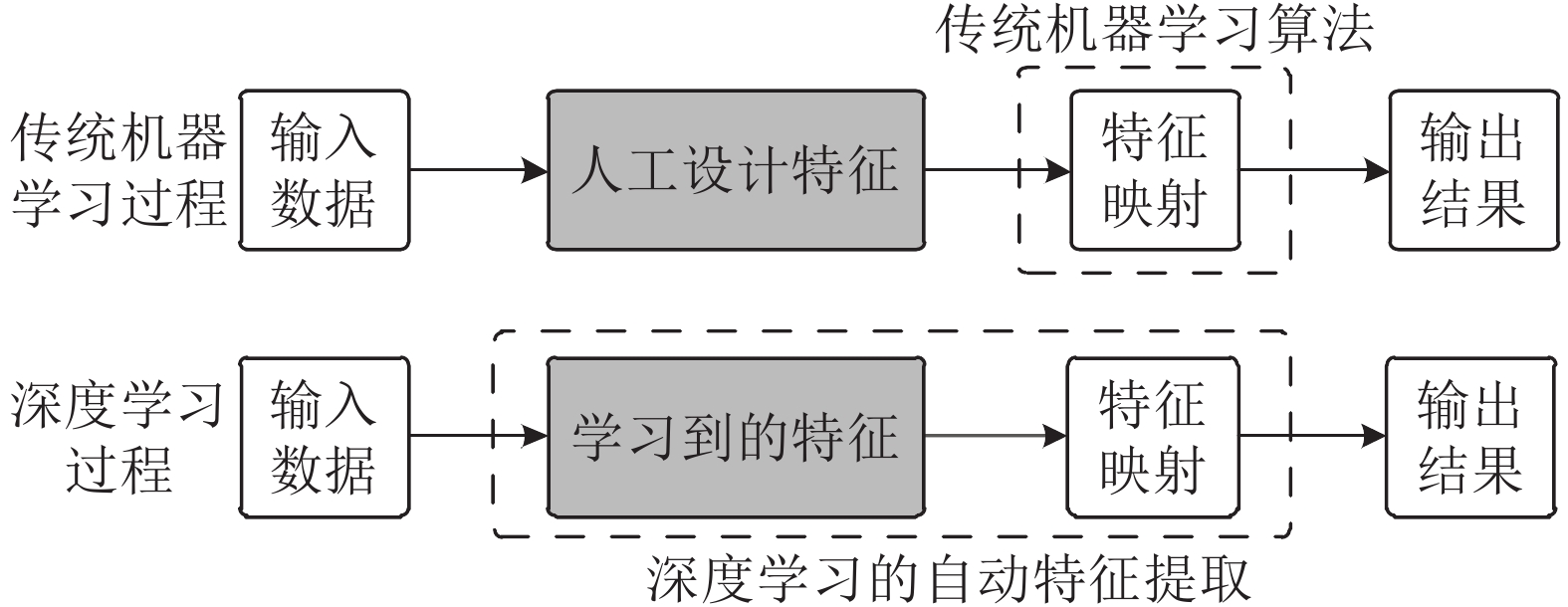
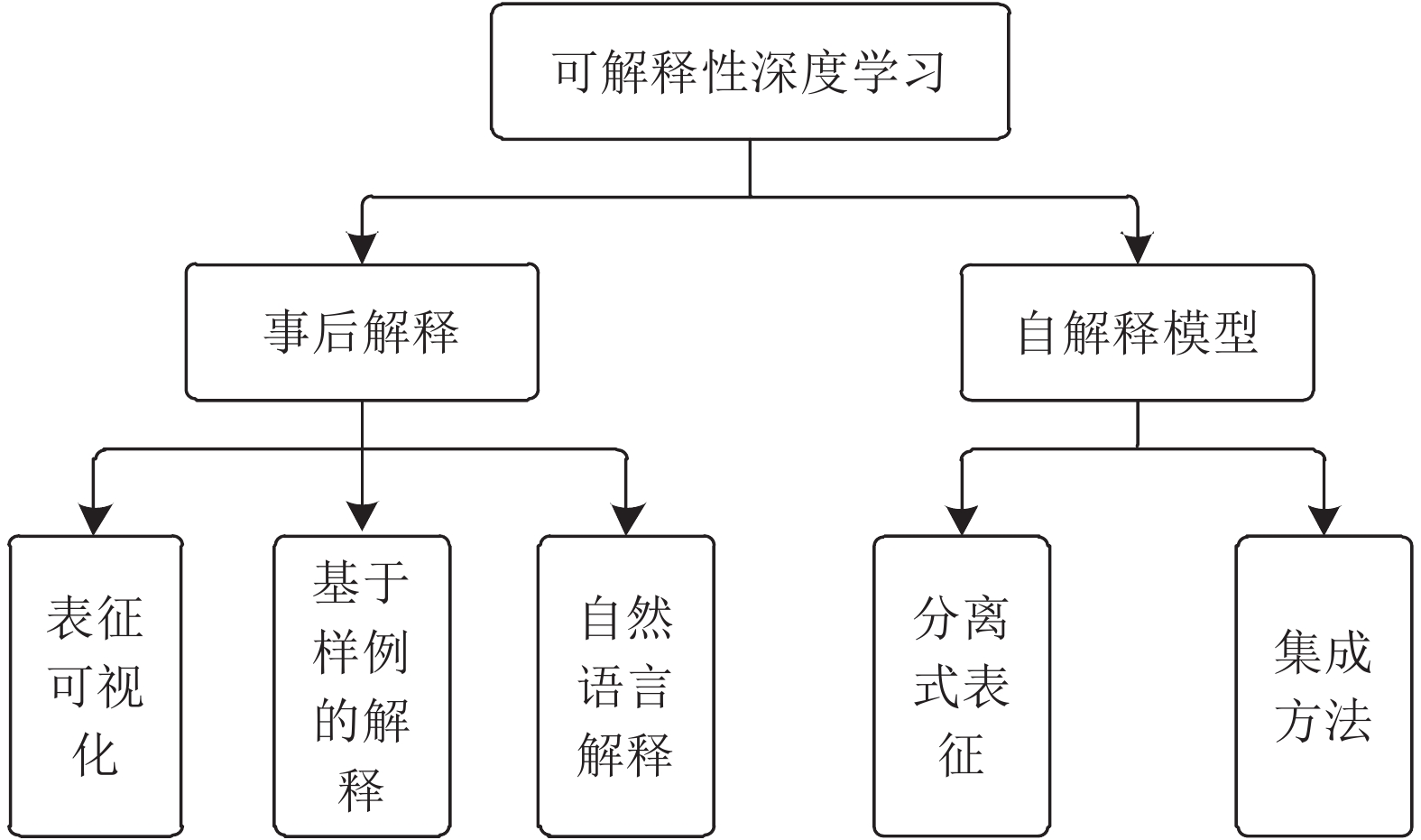
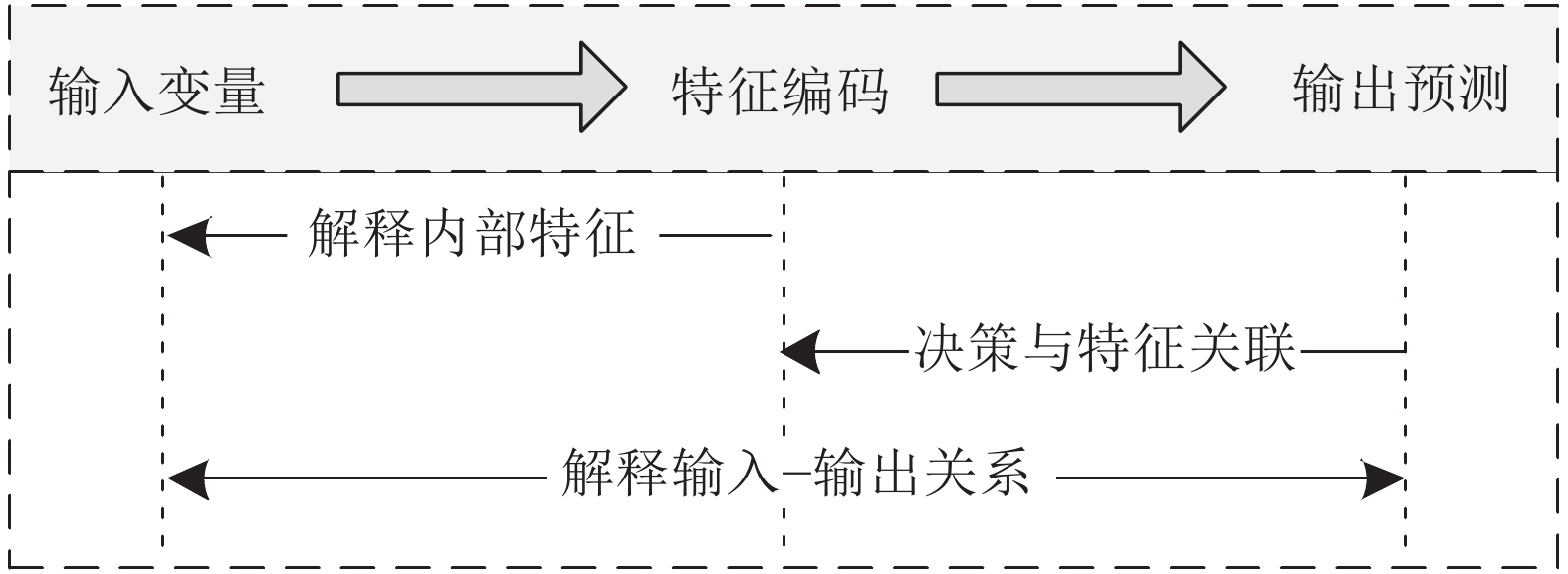
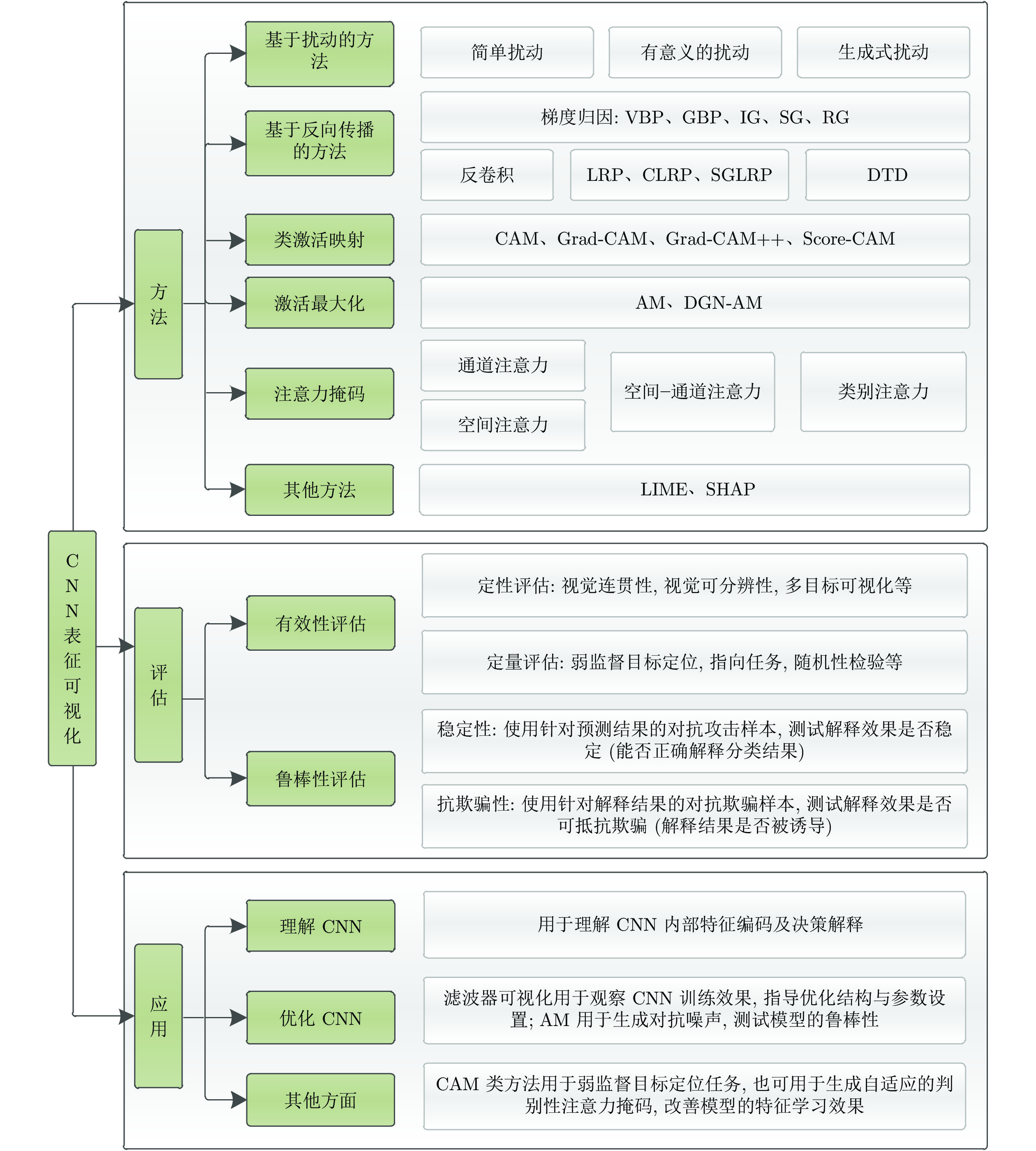
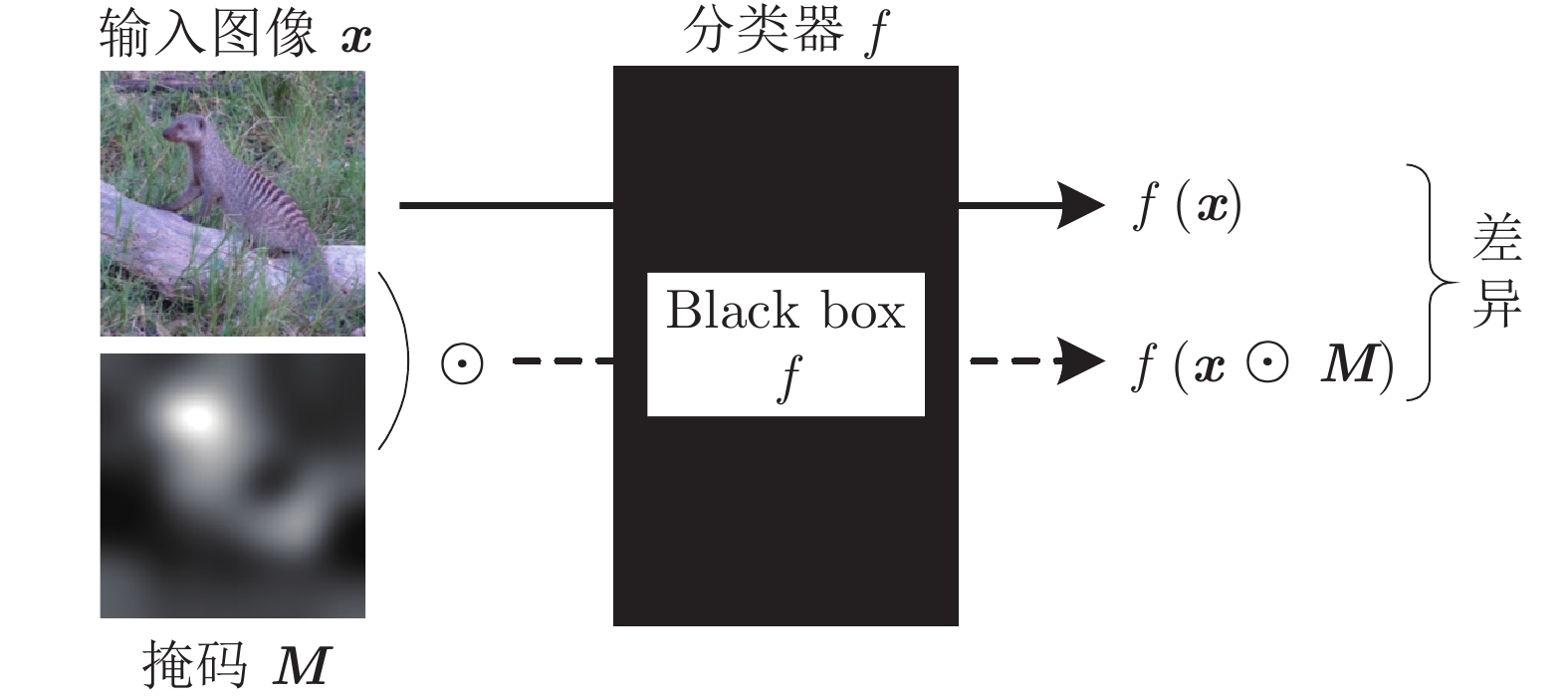
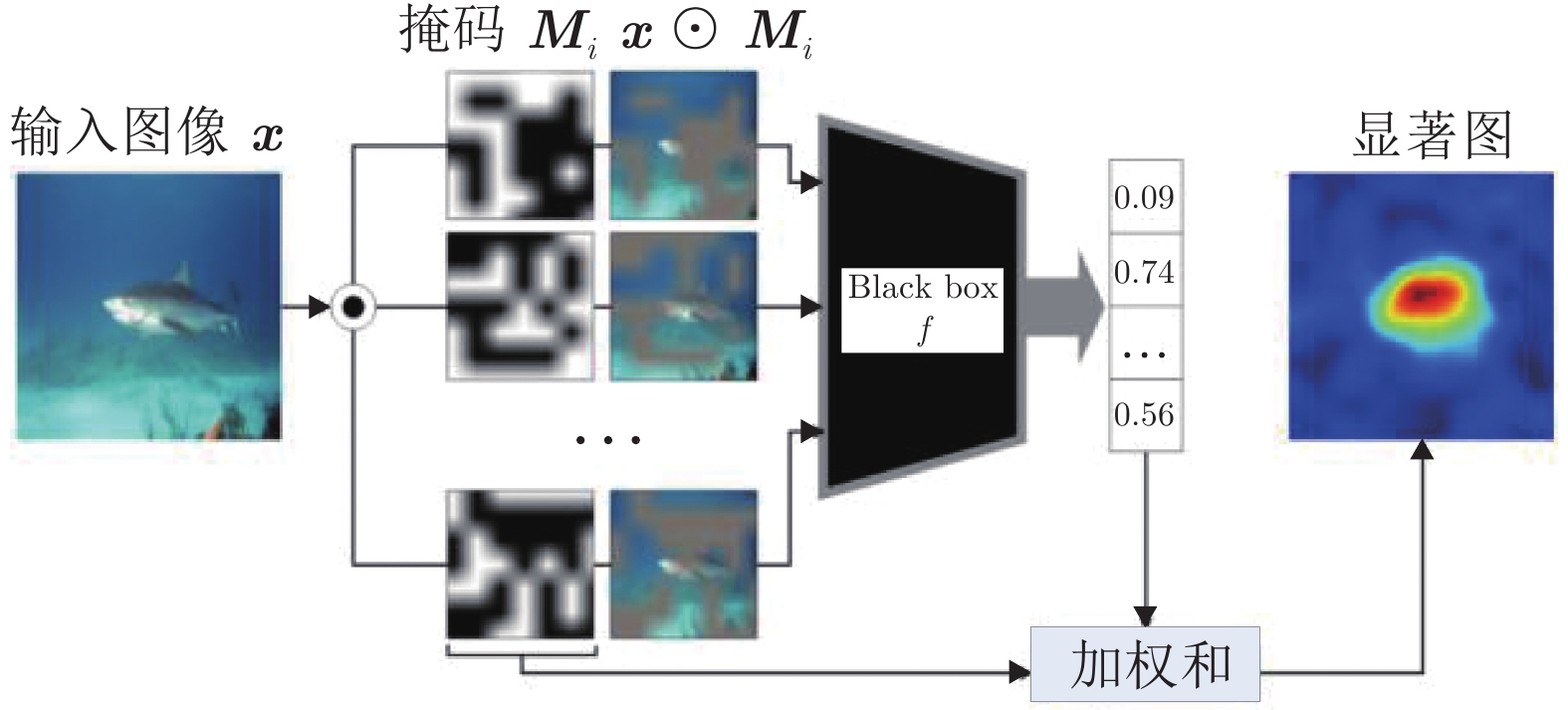
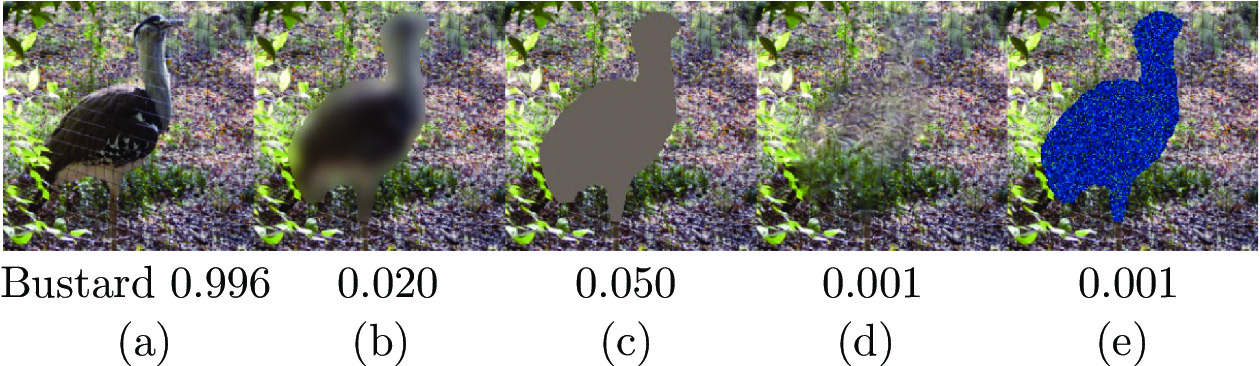
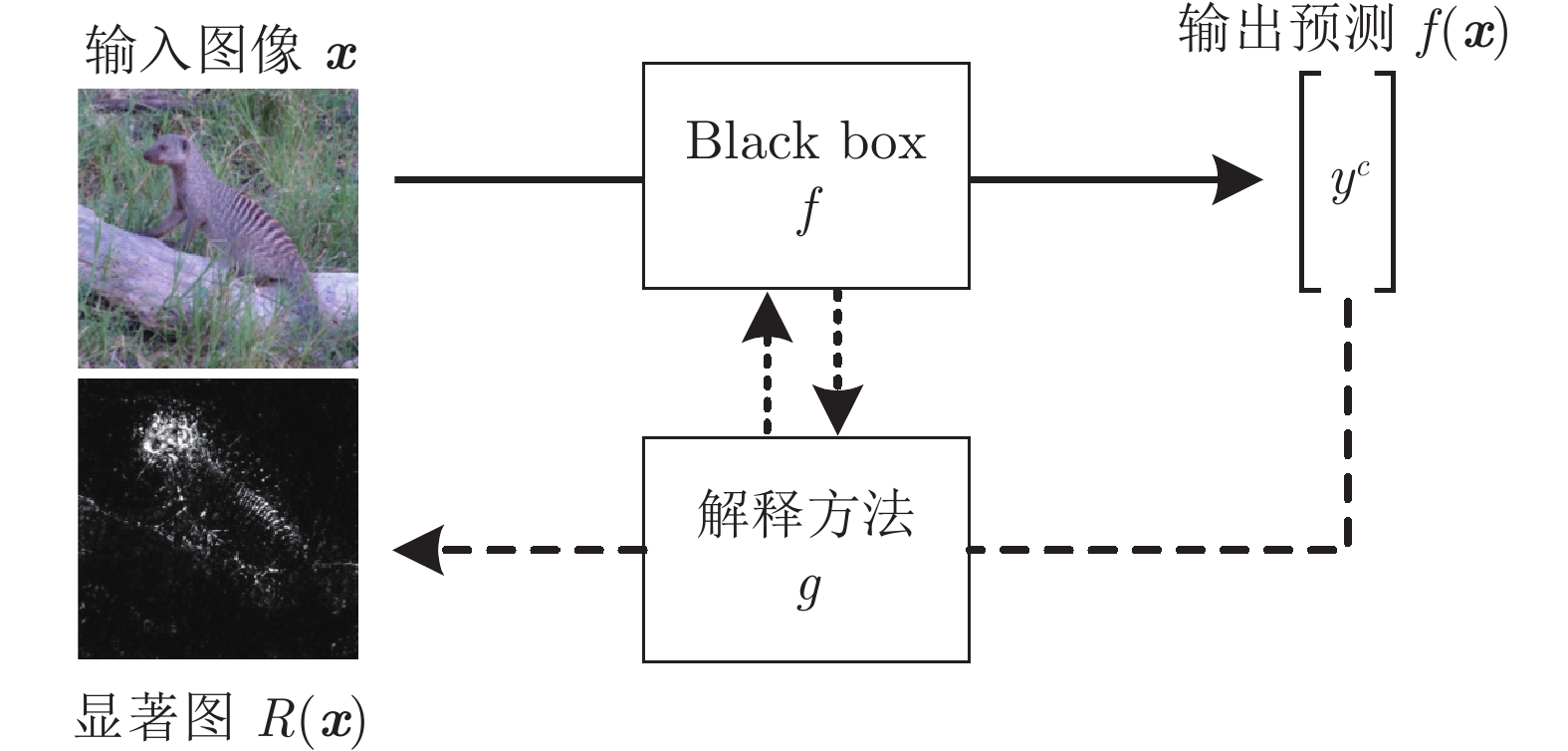
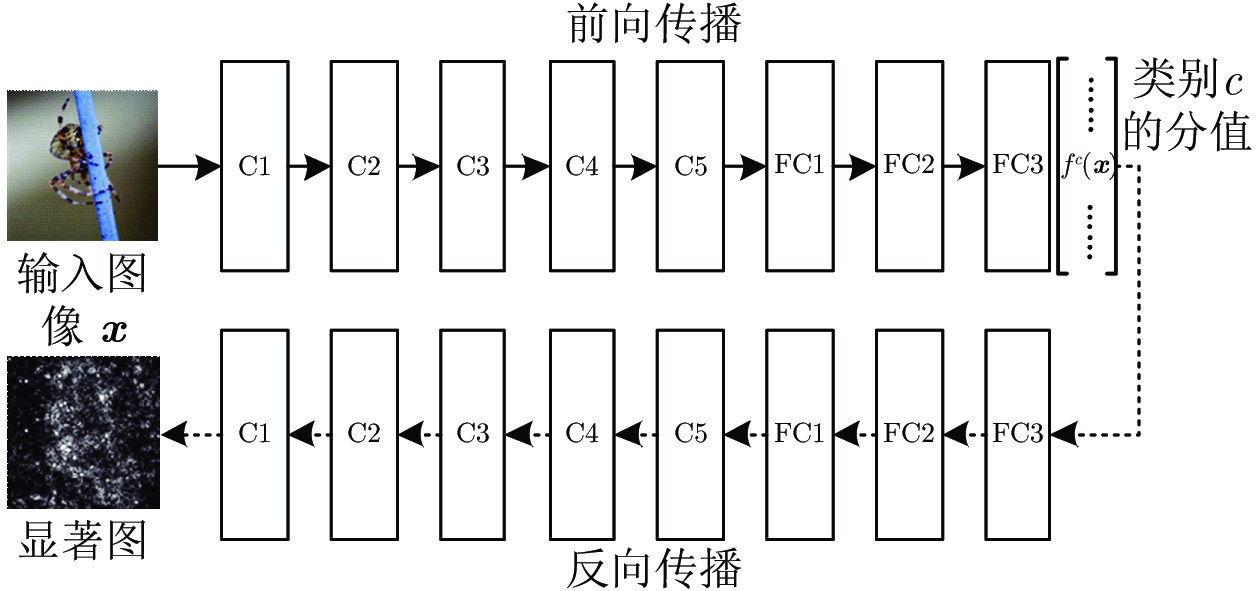
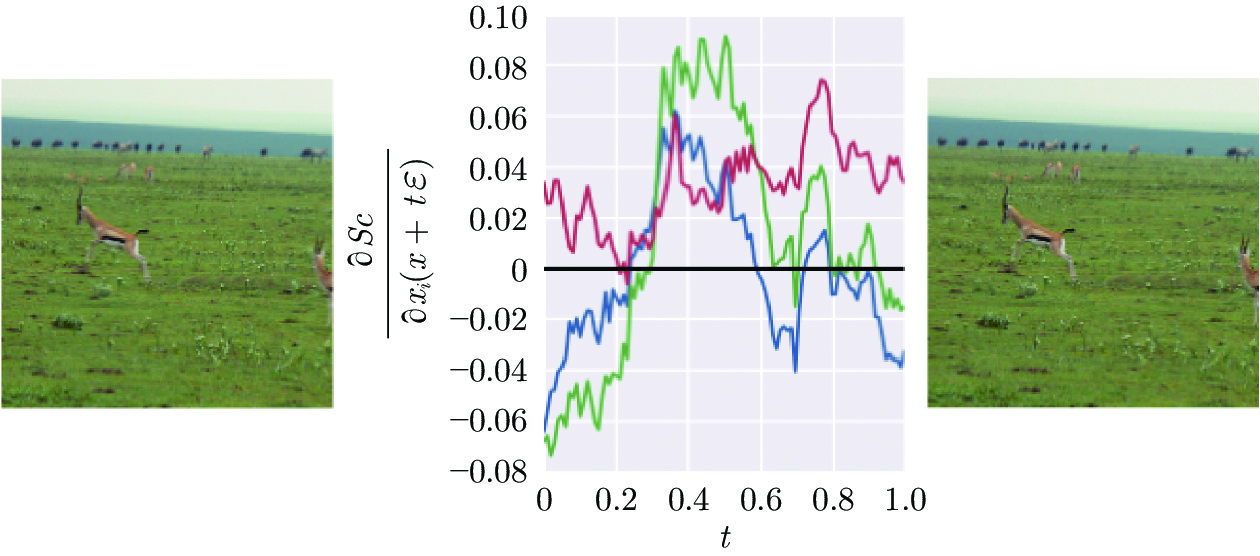
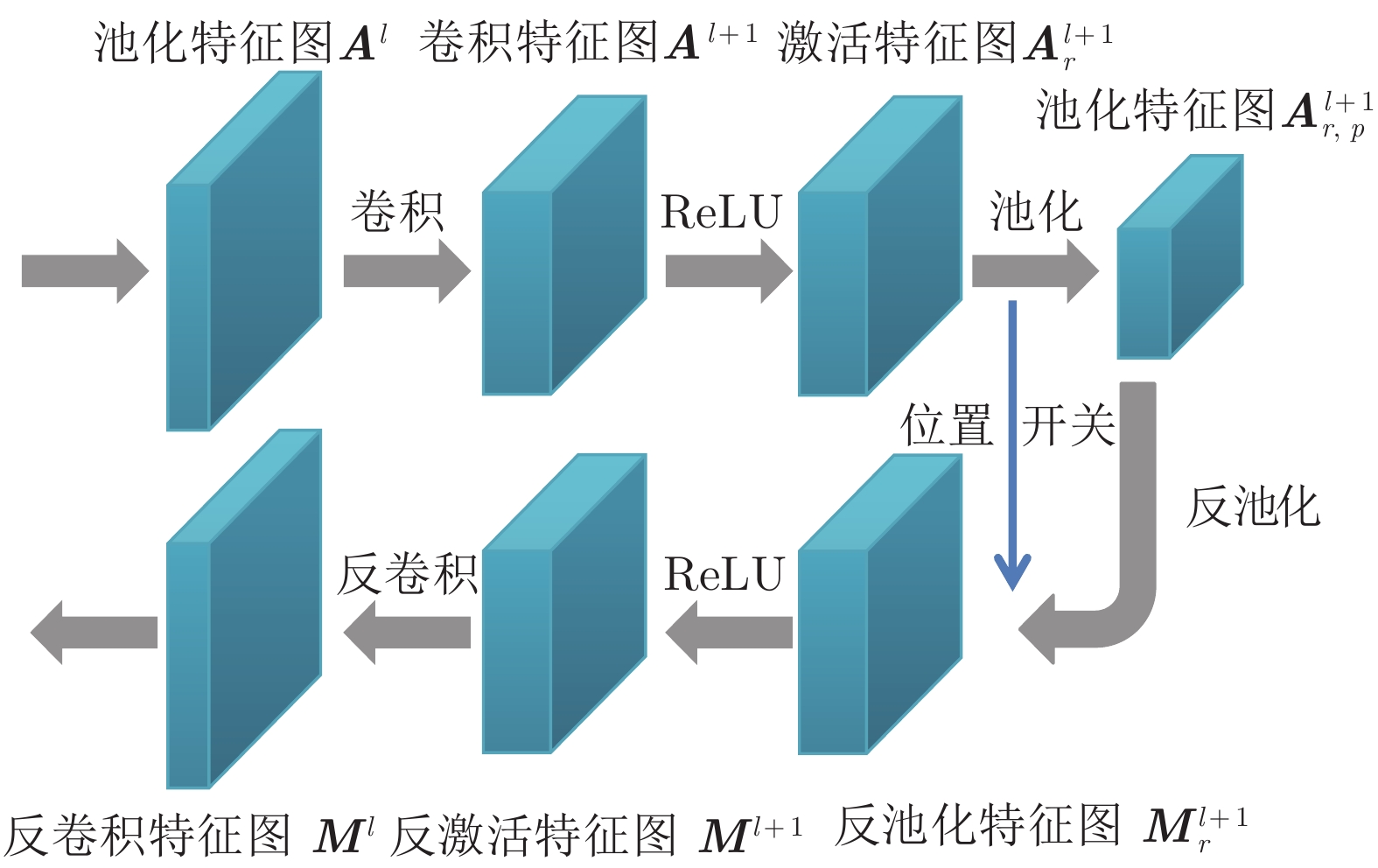
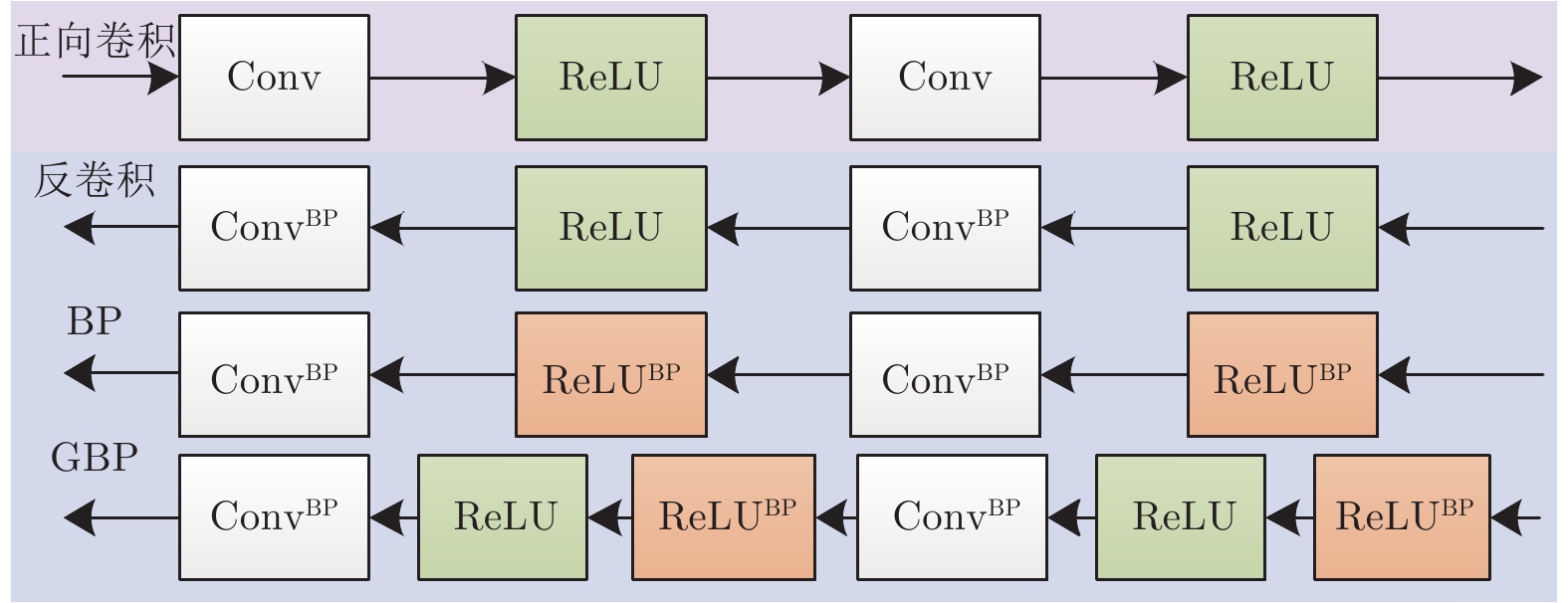
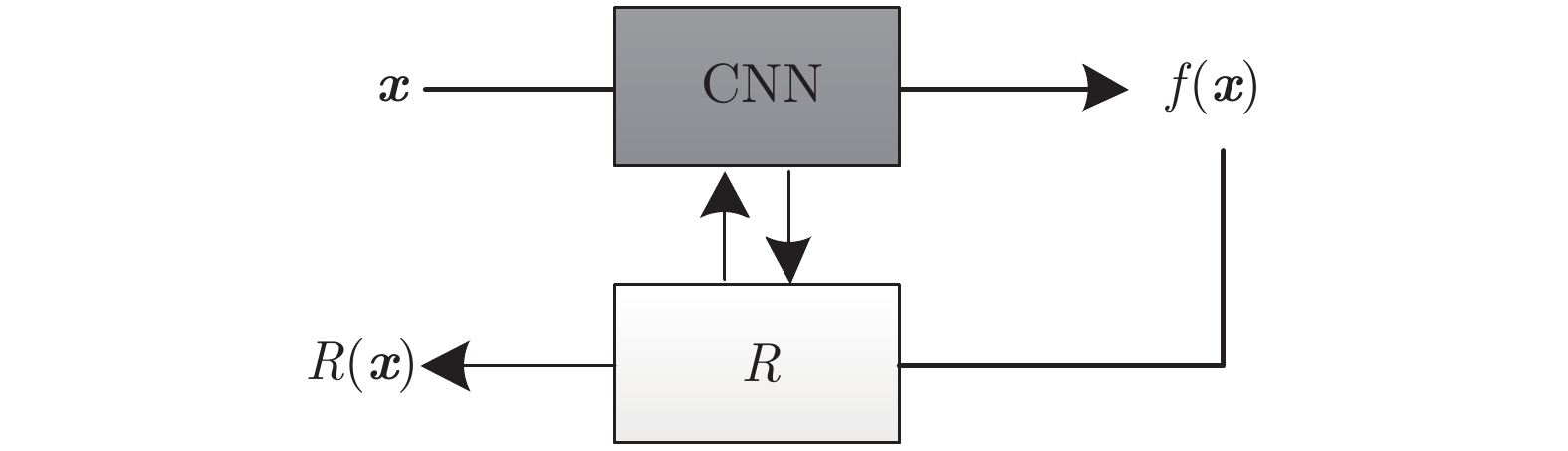
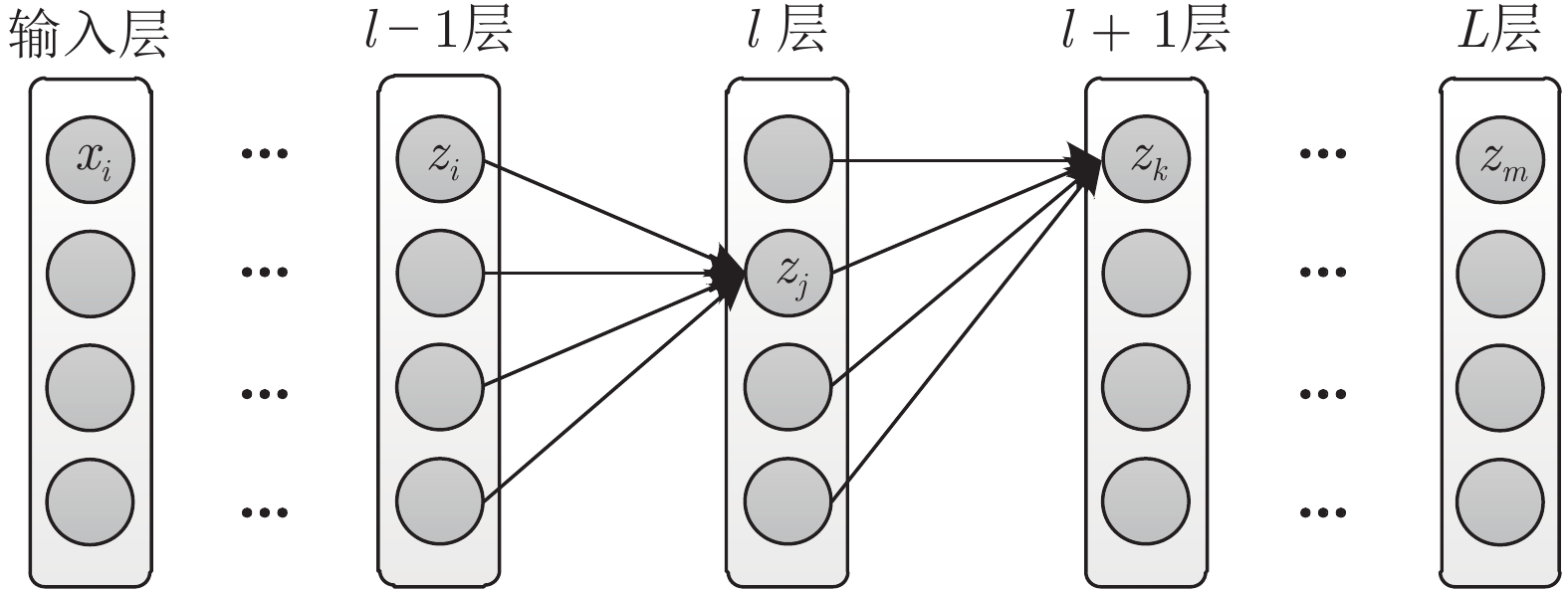
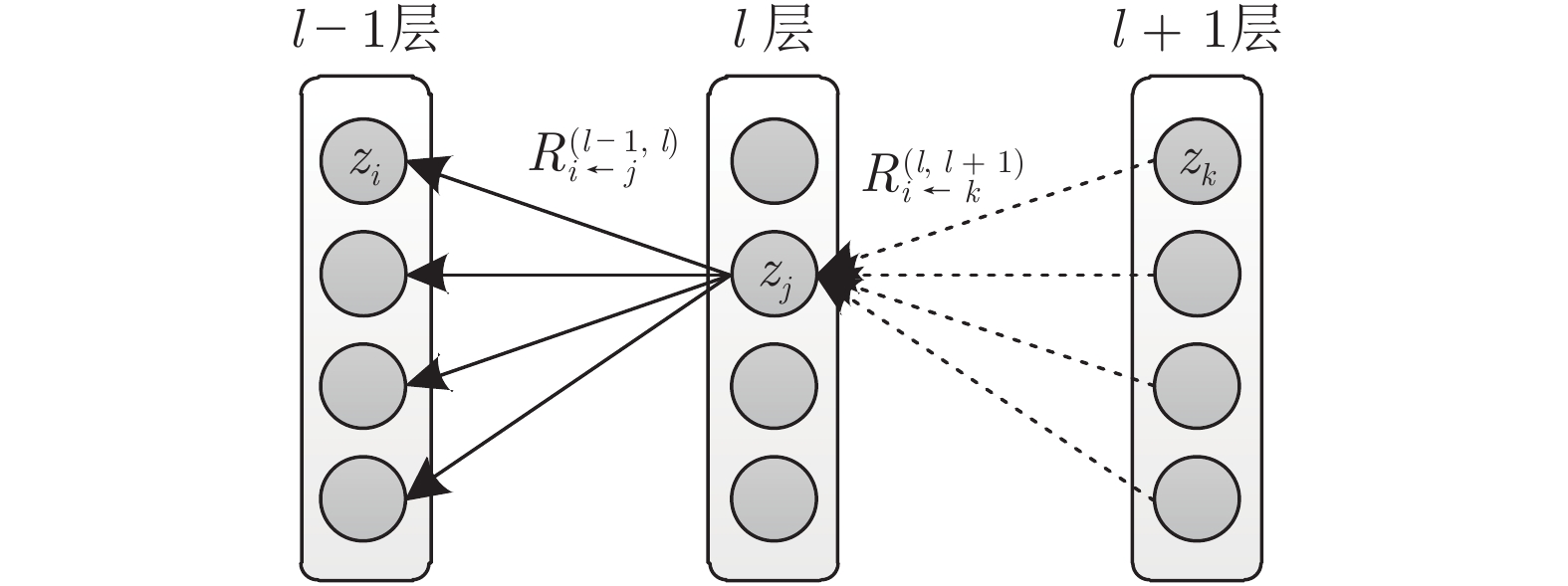
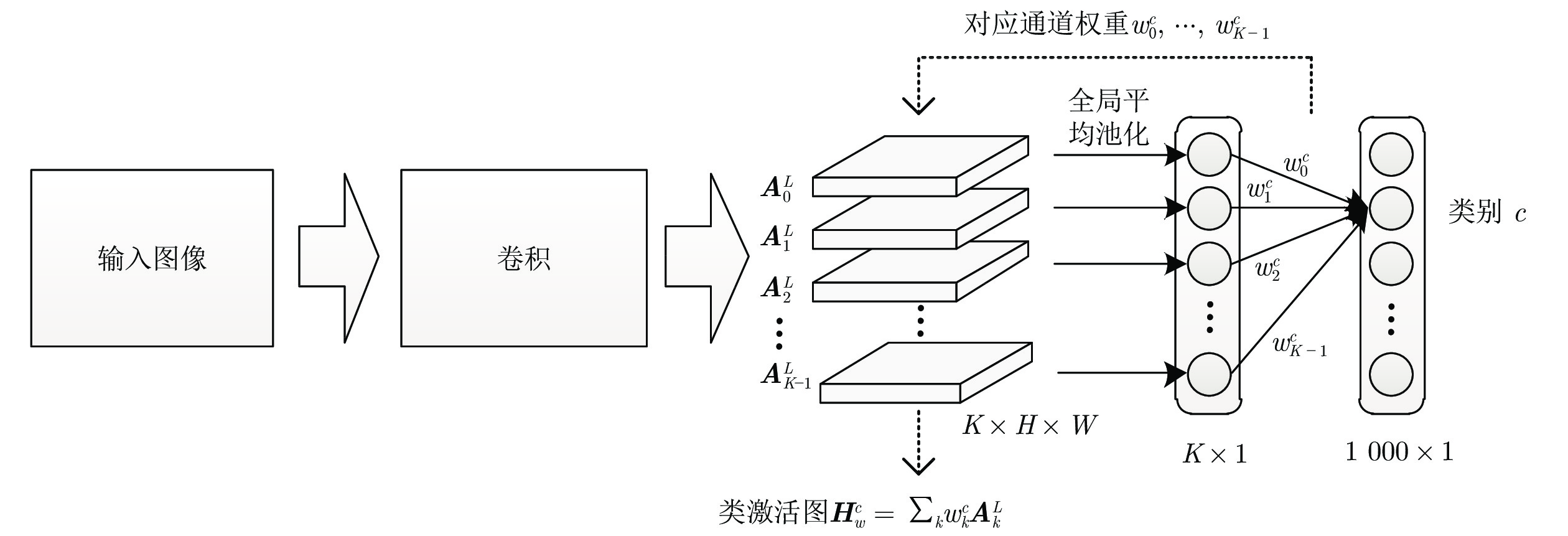
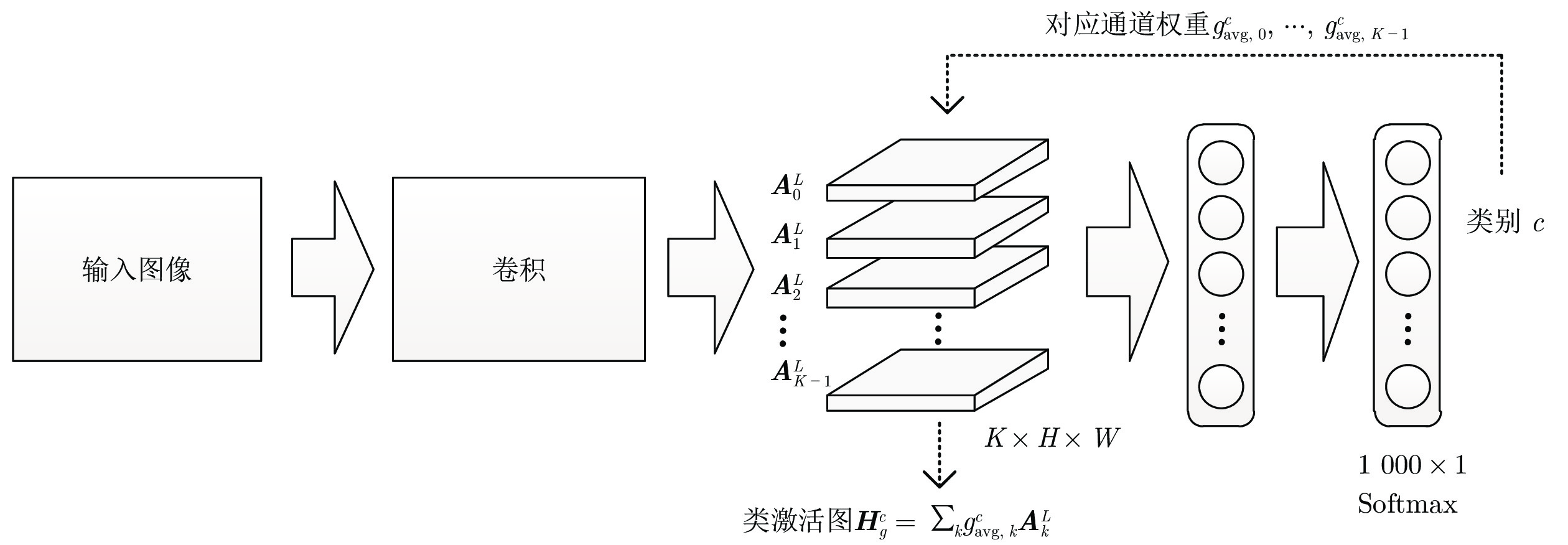
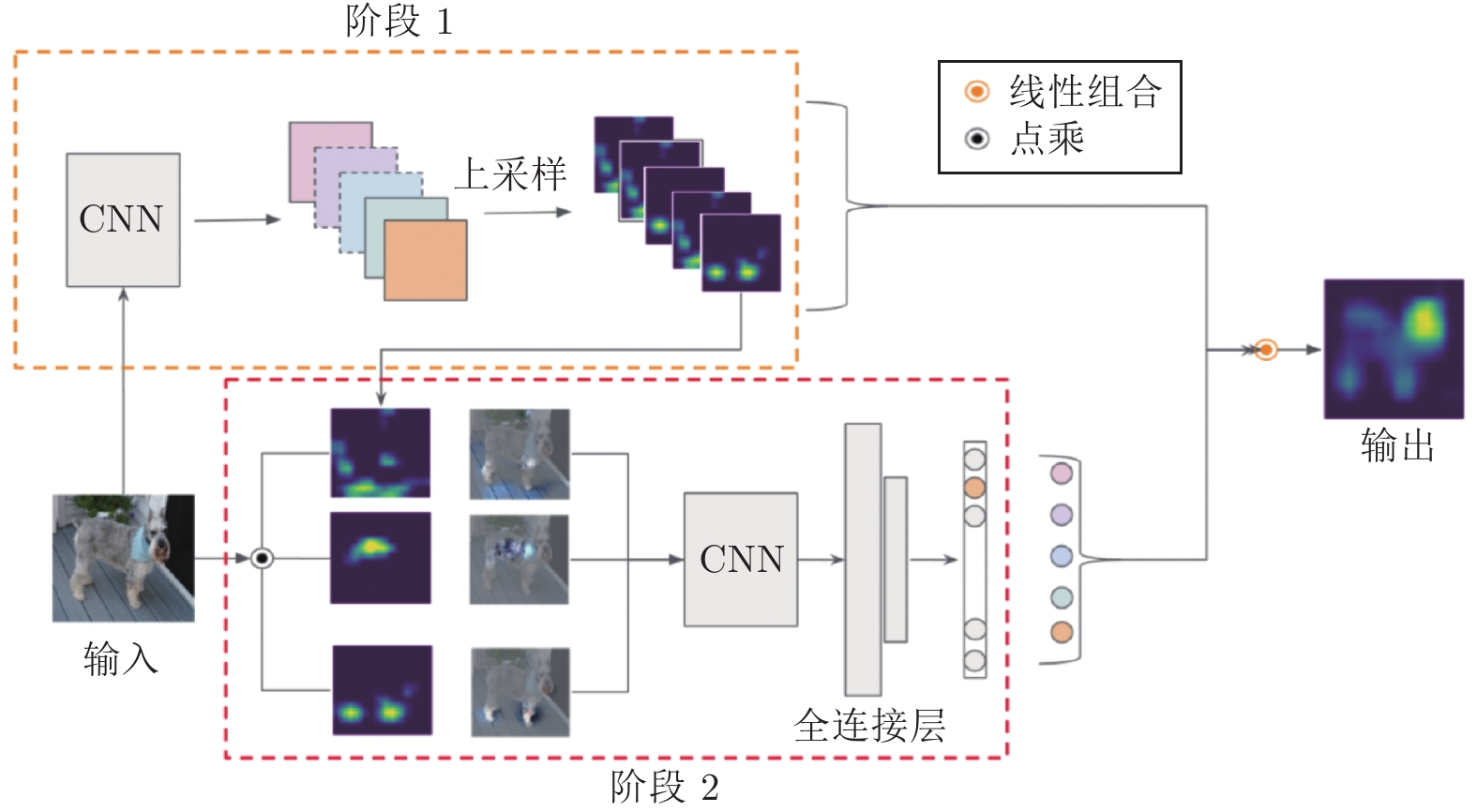
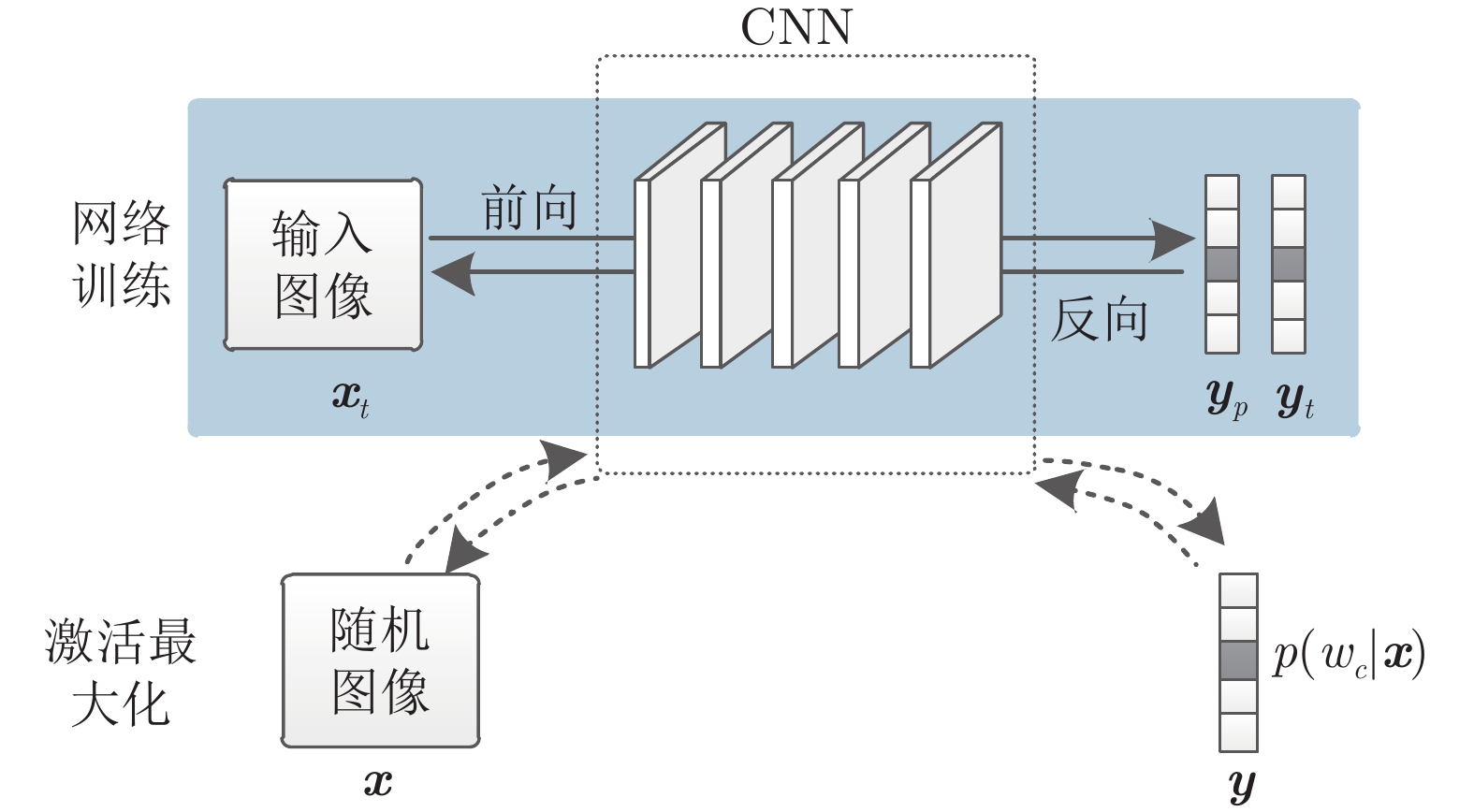
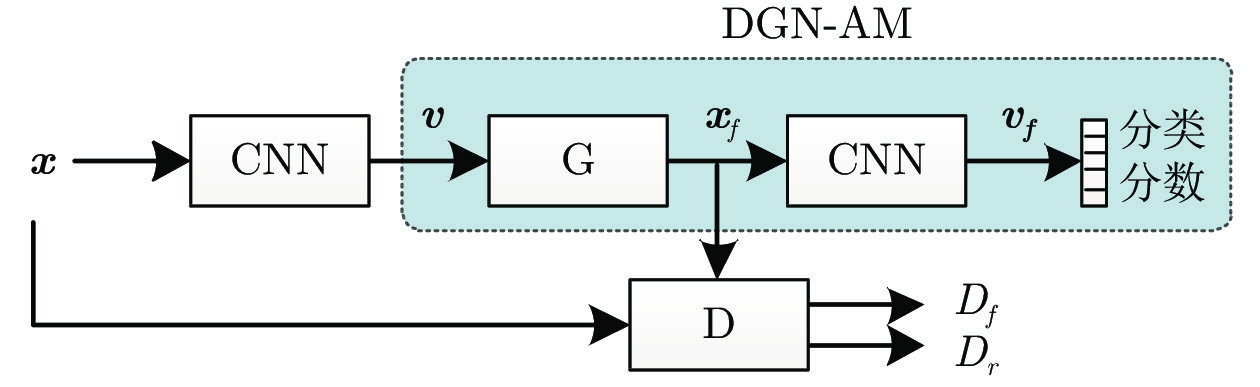
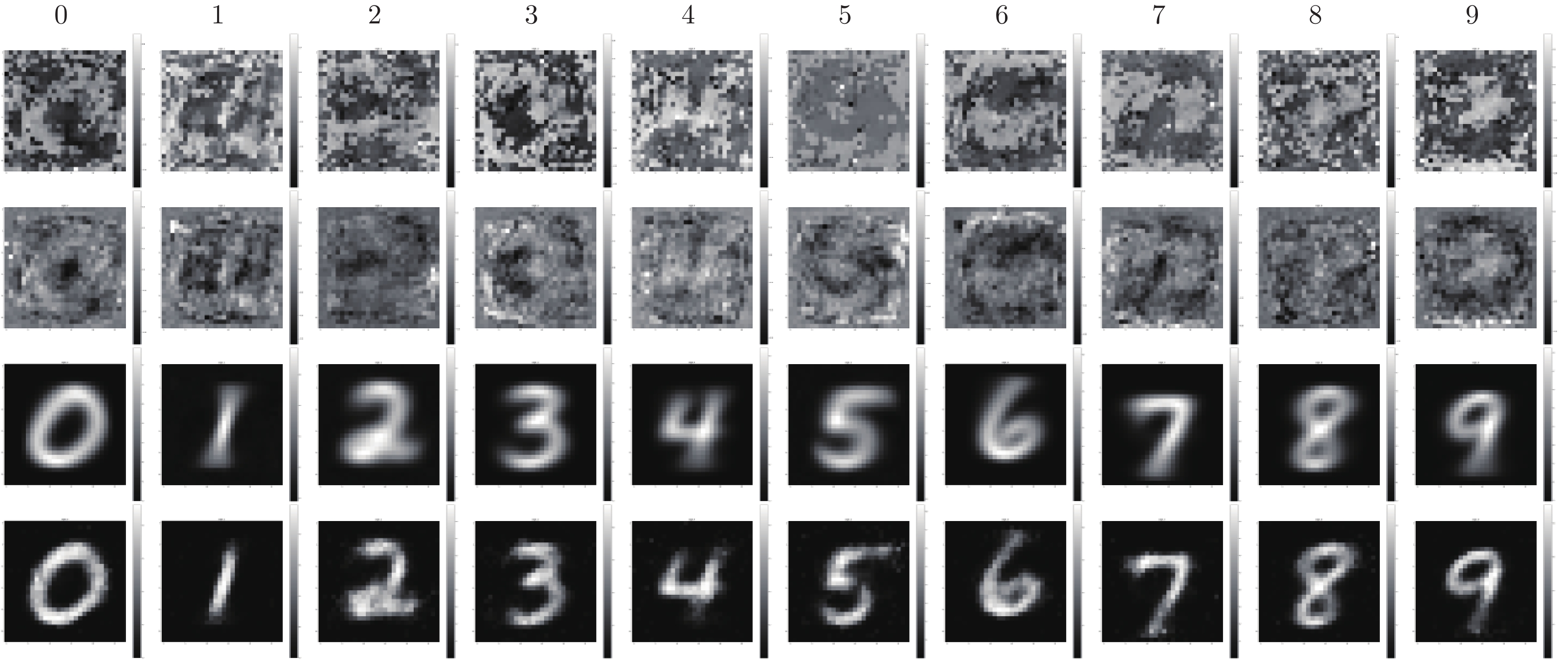
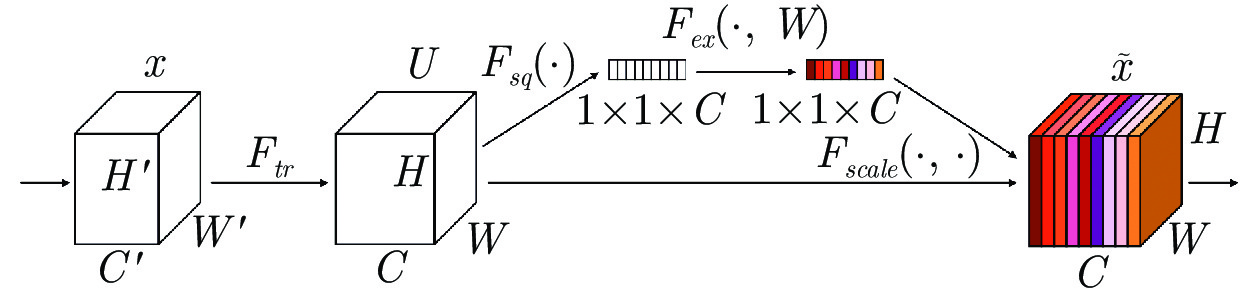
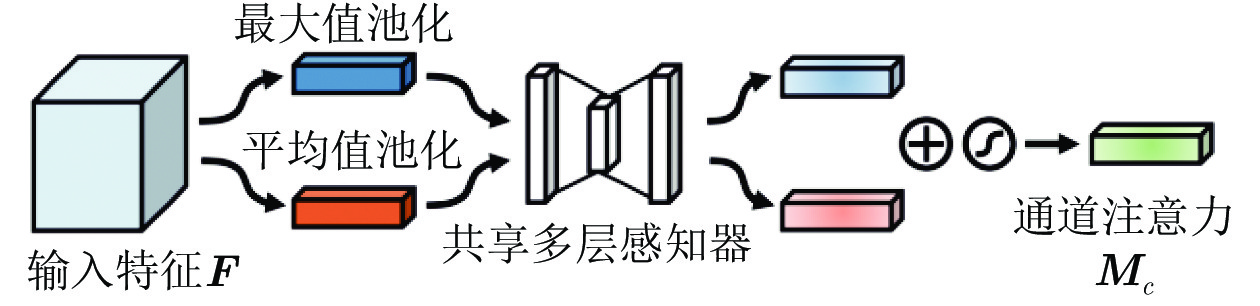
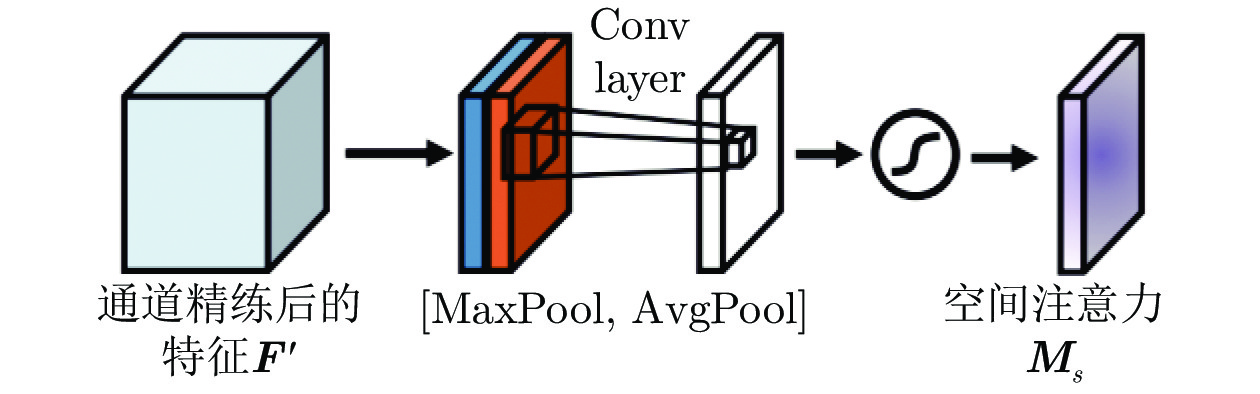
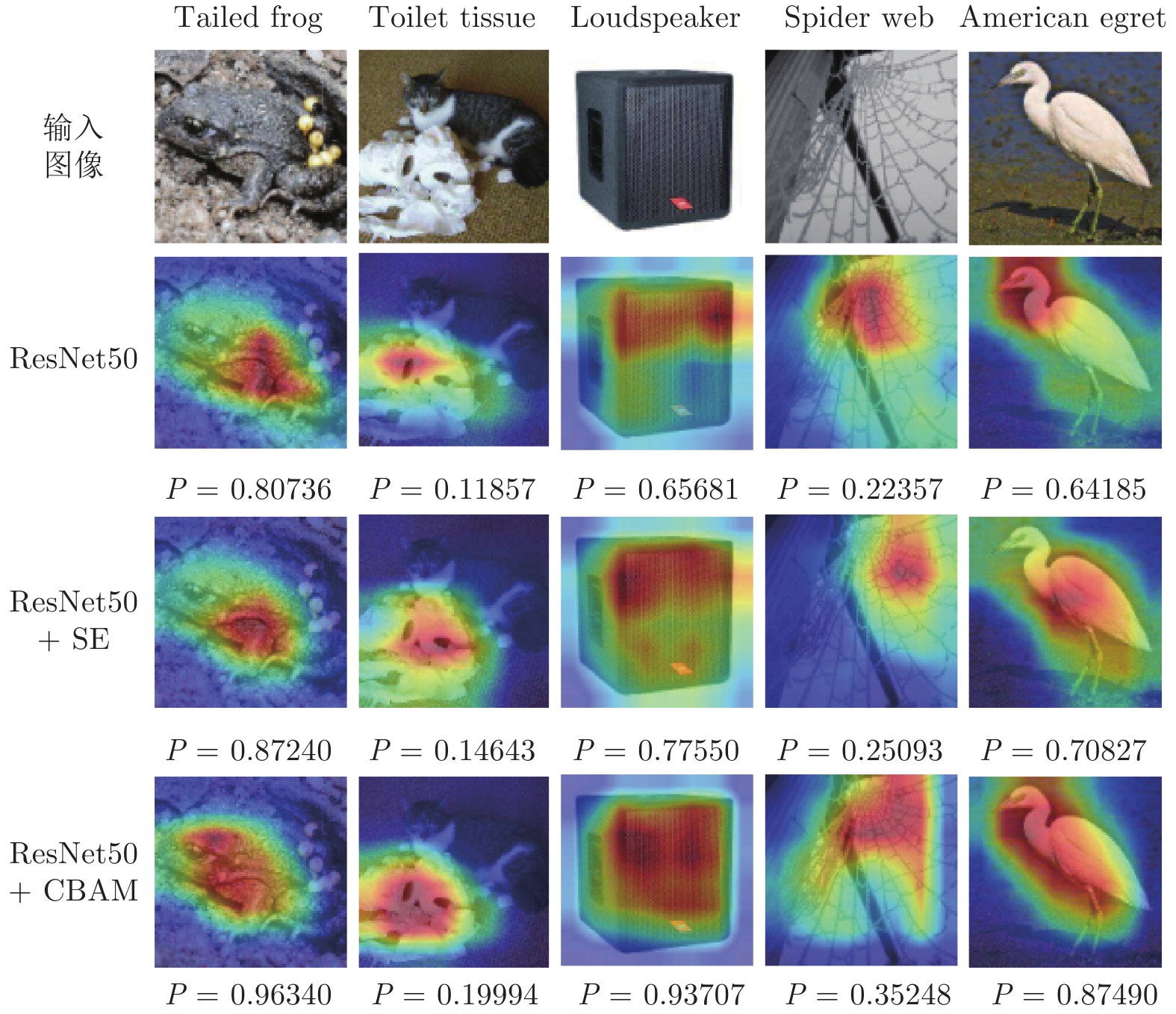
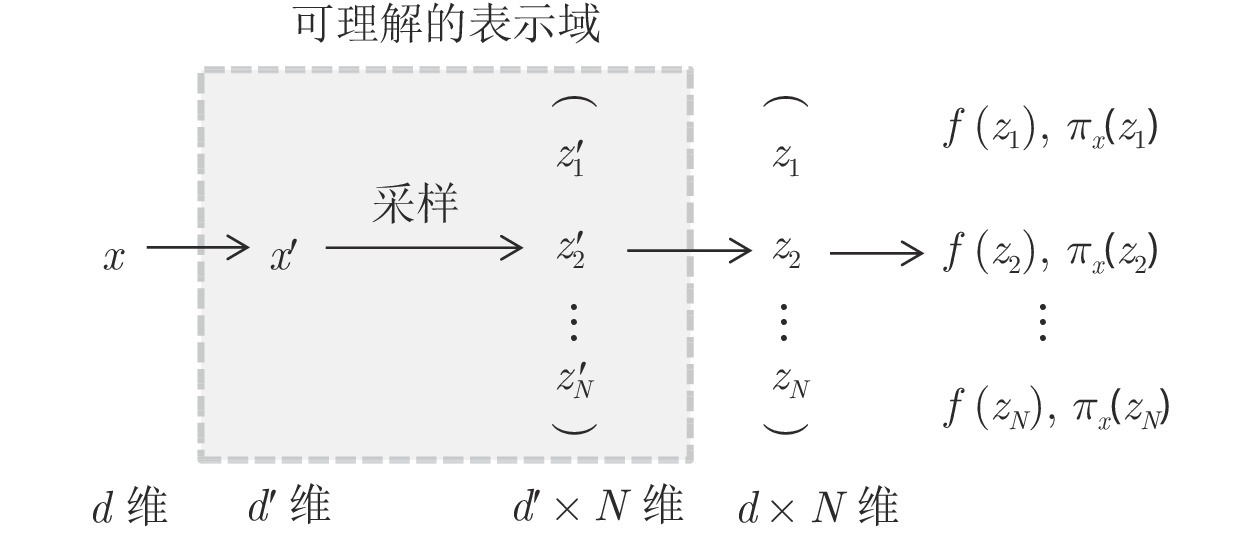
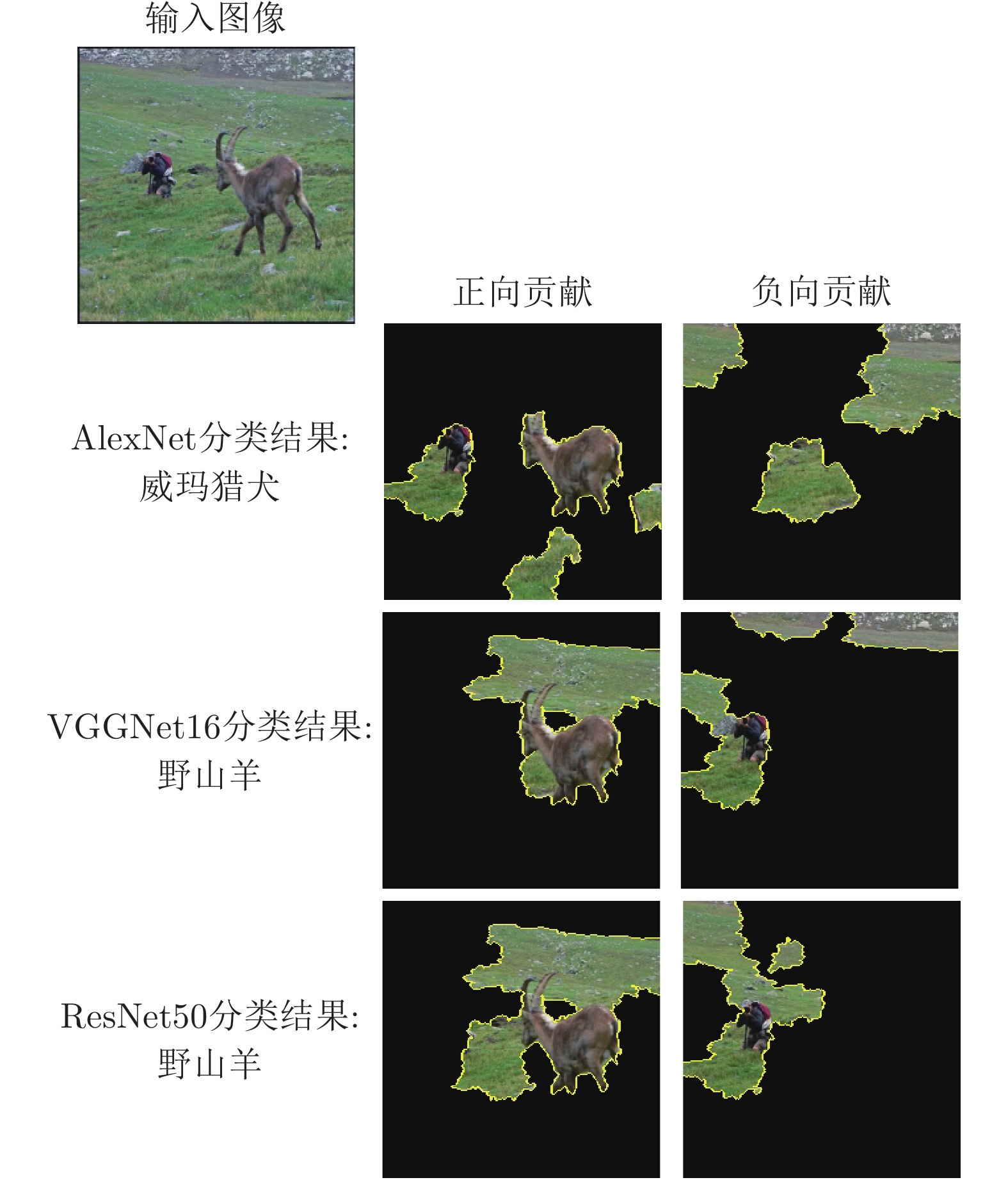
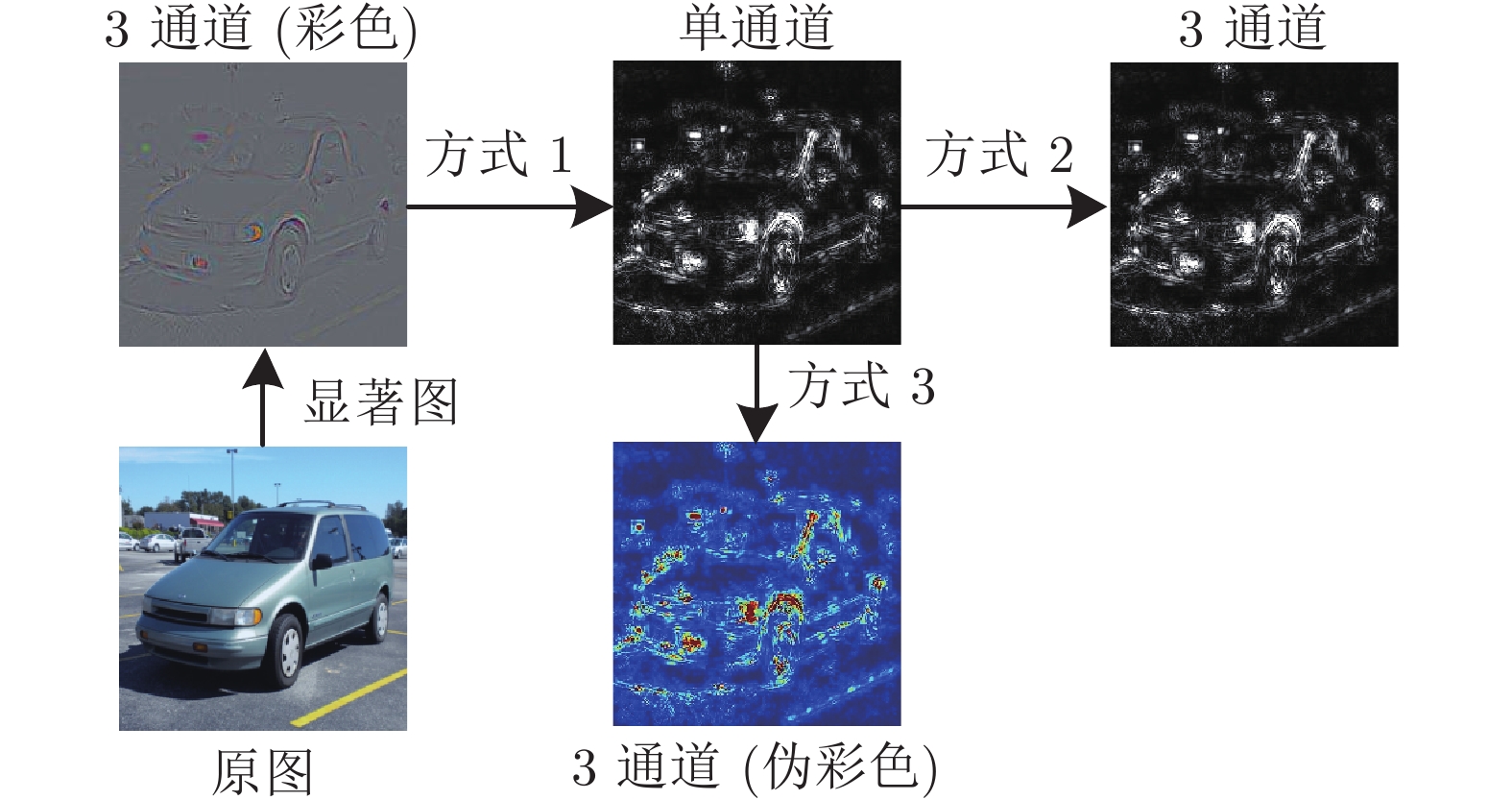
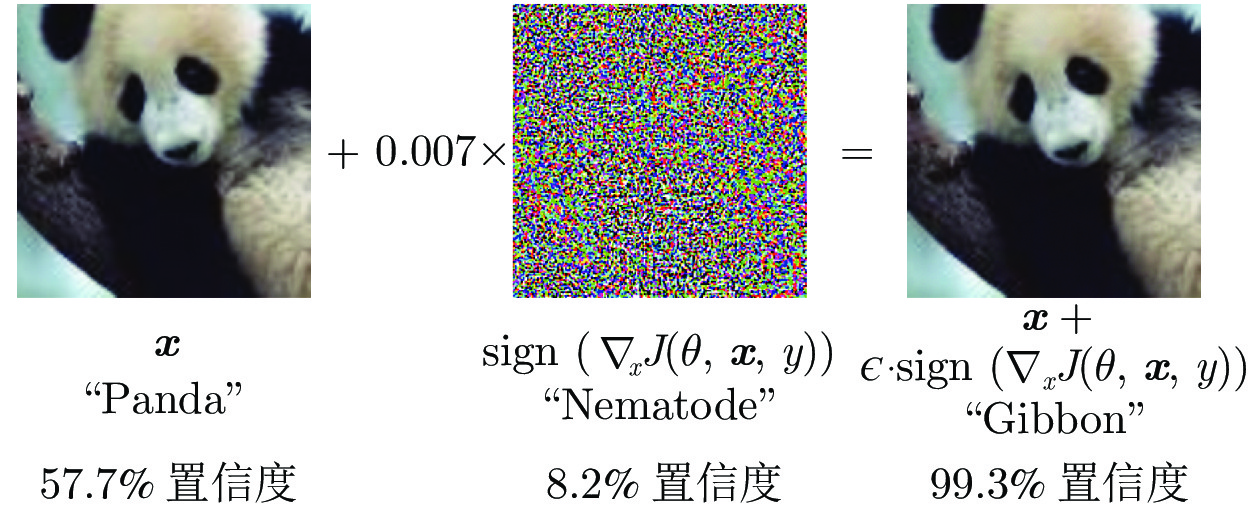
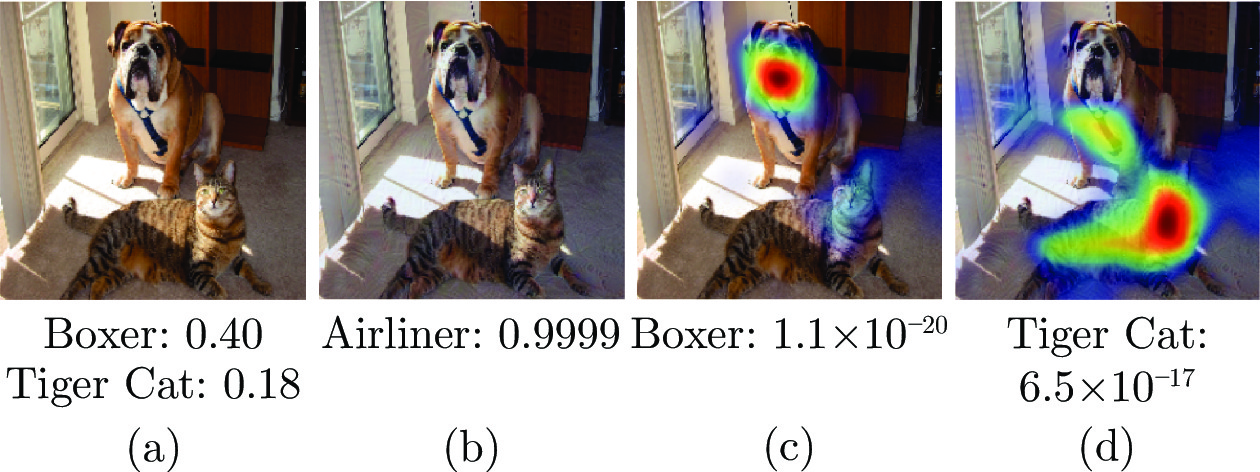
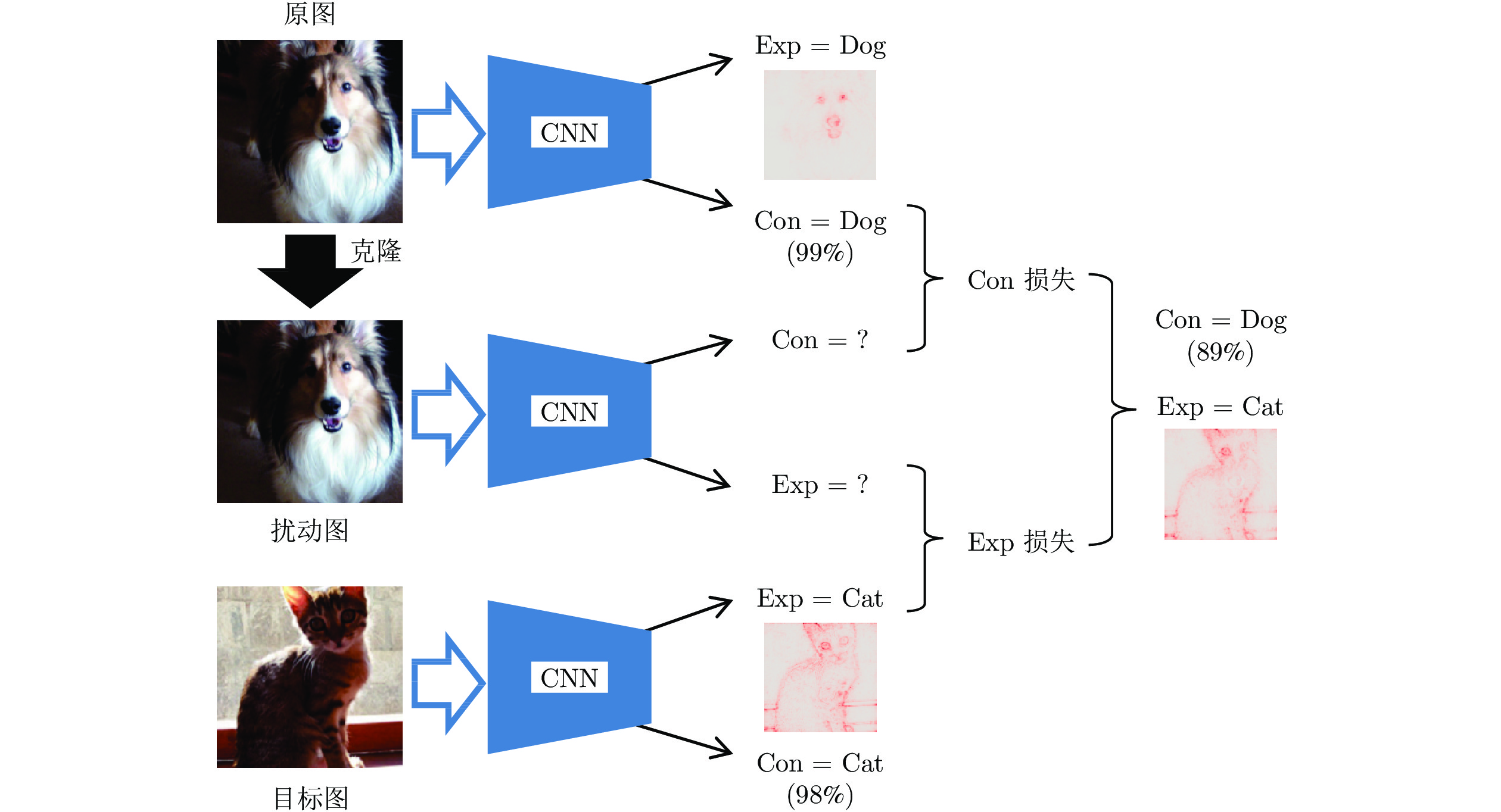
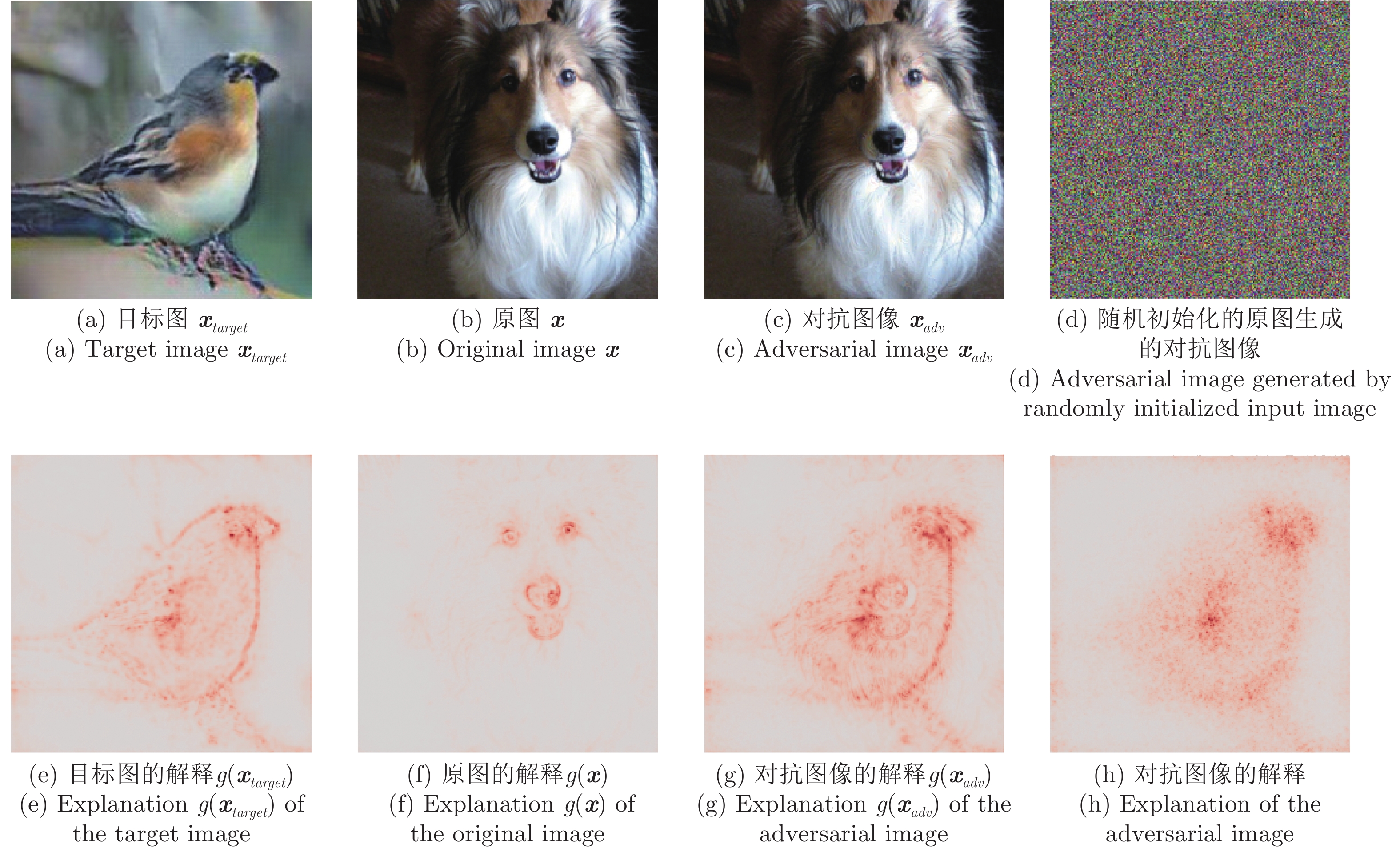
近年来, 深度学习在图像分类、目标检测及场景识别等任务上取得了突破性进展, 这些任务多以卷积神经网络为基础搭建识别模型, 训练后的模型拥有优异的自动特征提取和预测性能, 能够为用户提供“输入–输出”形式的端到端解决方案. 然而, 由于分布式的特征编码和越来越复杂的模型结构, 人们始终无法准确理解卷积神经网络模型内部知识表示, 以及促使其做出特定决策的潜在原因. 另一方面, 卷积神经网络模型在一些高风险领域的应用, 也要求对其决策原因进行充分了解, 方能获取用户信任. 因此, 卷积神经网络的可解释性问题逐渐受到关注. 研究人员针对性地提出了一系列用于理解和解释卷积神经网络的方法, 包括事后解释方法和构建自解释的模型等, 这些方法各有侧重和优势, 从多方面对卷积神经网络进行特征分析和决策解释. 表征可视化是其中一种重要的卷积神经网络可解释性方法, 能够对卷积神经网络所学特征及输入–输出之间的相关关系以视觉的方式呈现, 从而快速获取对卷积神经网络内部特征和决策的理解, 具有过程简单和效果直观的特点. 对近年来卷积神经网络表征可视化领域的相关文献进行了综合性回顾, 按照以下几个方面组织内容: 表征可视化研究的提起、相关概念及内容、可视化方法、可视化的效果评估及可视化的应用, 重点关注了表征可视化方法的分类及算法的具体过程. 最后是总结和对该领域仍存在的难点及未来研究趋势进行了展望.
近年来, 深度学习在图像分类、目标检测及场景识别等任务上取得了突破性进展, 这些任务多以卷积神经网络为基础搭建识别模型, 训练后的模型拥有优异的自动特征提取和预测性能, 能够为用户提供“输入–输出”形式的端到端解决方案. 然而, 由于分布式的特征编码和越来越复杂的模型结构, 人们始终无法准确理解卷积神经网络模型内部知识表示, 以及促使其做出特定决策的潜在原因. 另一方面, 卷积神经网络模型在一些高风险领域的应用, 也要求对其决策原因进行充分了解, 方能获取用户信任. 因此, 卷积神经网络的可解释性问题逐渐受到关注. 研究人员针对性地提出了一系列用于理解和解释卷积神经网络的方法, 包括事后解释方法和构建自解释的模型等, 这些方法各有侧重和优势, 从多方面对卷积神经网络进行特征分析和决策解释. 表征可视化是其中一种重要的卷积神经网络可解释性方法, 能够对卷积神经网络所学特征及输入–输出之间的相关关系以视觉的方式呈现, 从而快速获取对卷积神经网络内部特征和决策的理解, 具有过程简单和效果直观的特点. 对近年来卷积神经网络表征可视化领域的相关文献进行了综合性回顾, 按照以下几个方面组织内容: 表征可视化研究的提起、相关概念及内容、可视化方法、可视化的效果评估及可视化的应用, 重点关注了表征可视化方法的分类及算法的具体过程. 最后是总结和对该领域仍存在的难点及未来研究趋势进行了展望.


2022, 48(8): 1921-1930.
doi: 10.16383/j.aas.c190770
摘要:
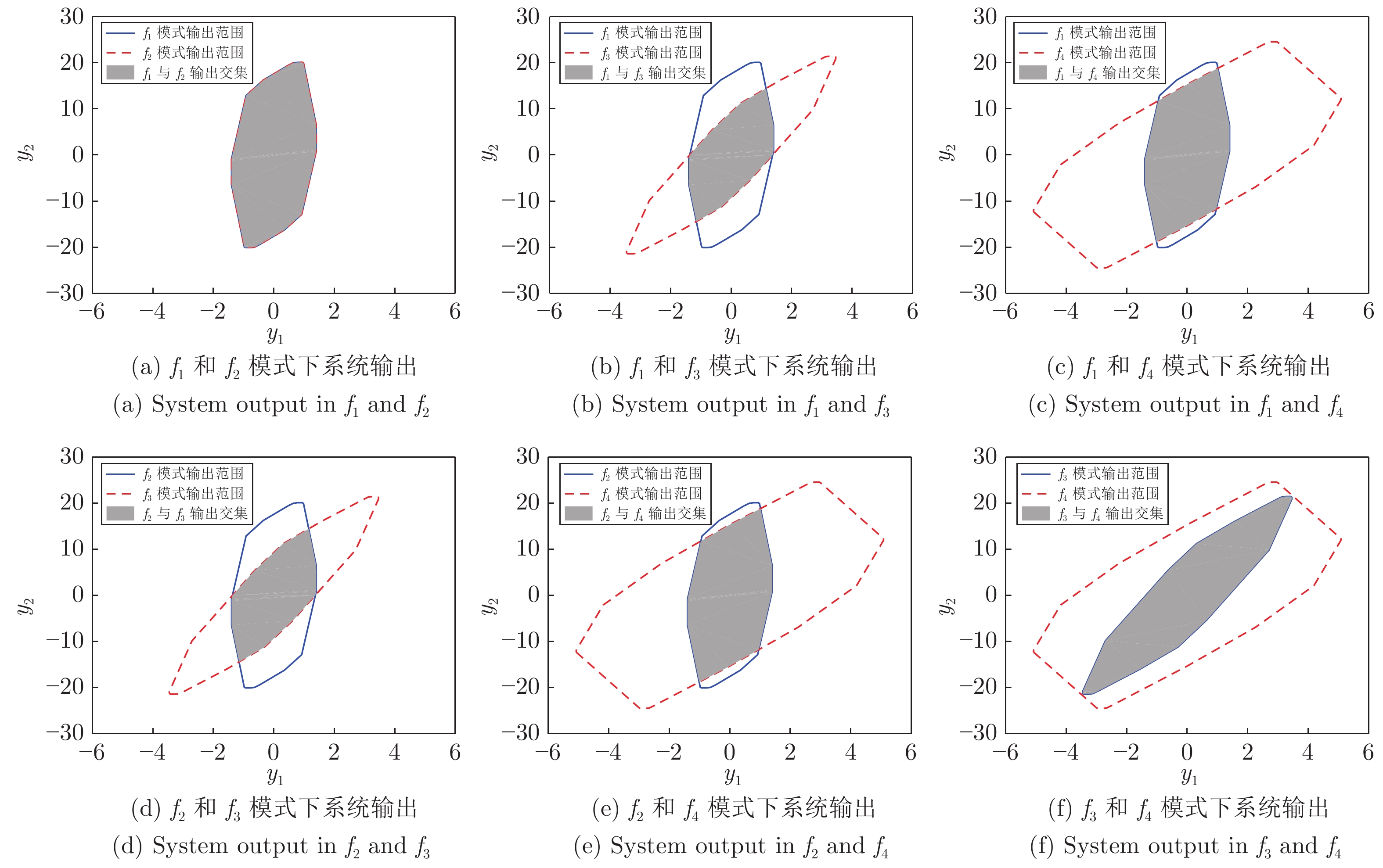
针对包含幅值有界而分布形式未知的故障及输入干扰项的线性离散系统, 提出了一种新的系统故障可分离性的量化评价方法. 故障可分离性是故障可诊断性中的重要部分, 针对现有方法中基于方向相似度的故障可分离性评价方法存在的不足加以补充, 提出了利用中心对称多胞体对故障可分离性进行分析, 将中心对称多胞体集合转化为多面体的表示形式, 以达到对故障可分离性量化评价的目的, 同时给出了具体评价原理和评价指标. 最后, 通过数值仿真算例, 验证了该方法的有效性和优越性.
针对包含幅值有界而分布形式未知的故障及输入干扰项的线性离散系统, 提出了一种新的系统故障可分离性的量化评价方法. 故障可分离性是故障可诊断性中的重要部分, 针对现有方法中基于方向相似度的故障可分离性评价方法存在的不足加以补充, 提出了利用中心对称多胞体对故障可分离性进行分析, 将中心对称多胞体集合转化为多面体的表示形式, 以达到对故障可分离性量化评价的目的, 同时给出了具体评价原理和评价指标. 最后, 通过数值仿真算例, 验证了该方法的有效性和优越性.
2022, 48(8): 1931-1939.
doi: 10.16383/j.aas.c190748
摘要:
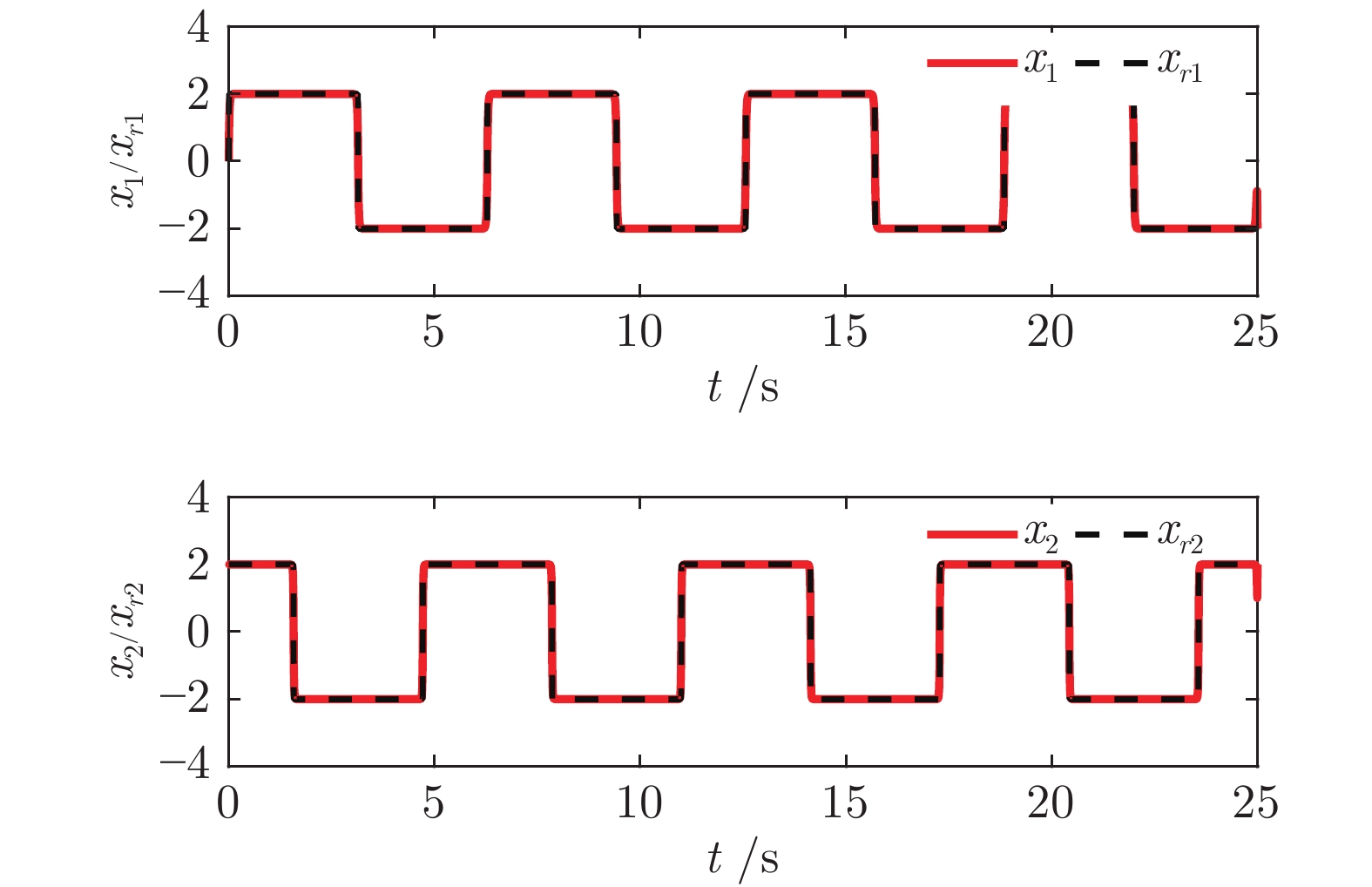
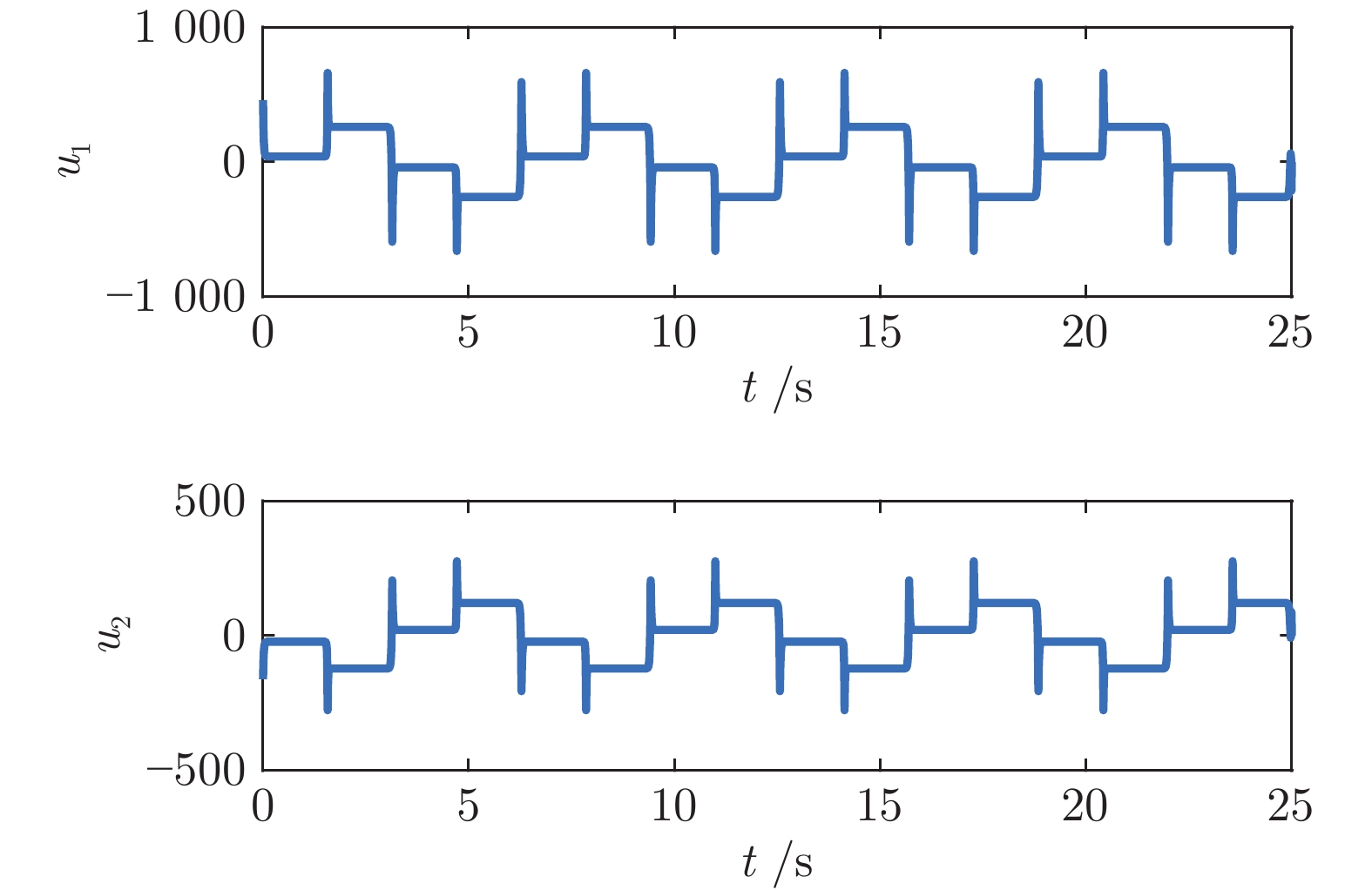
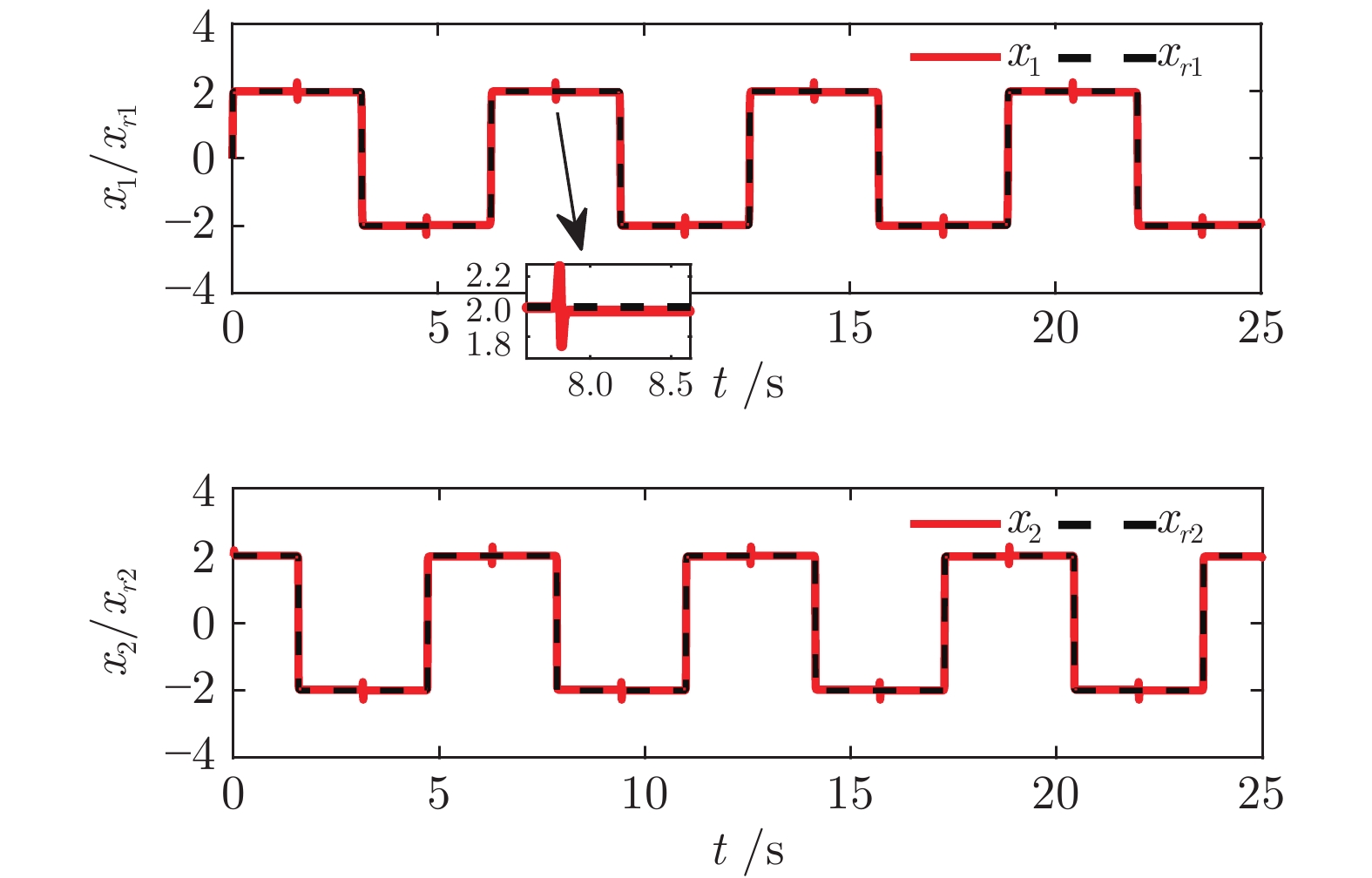
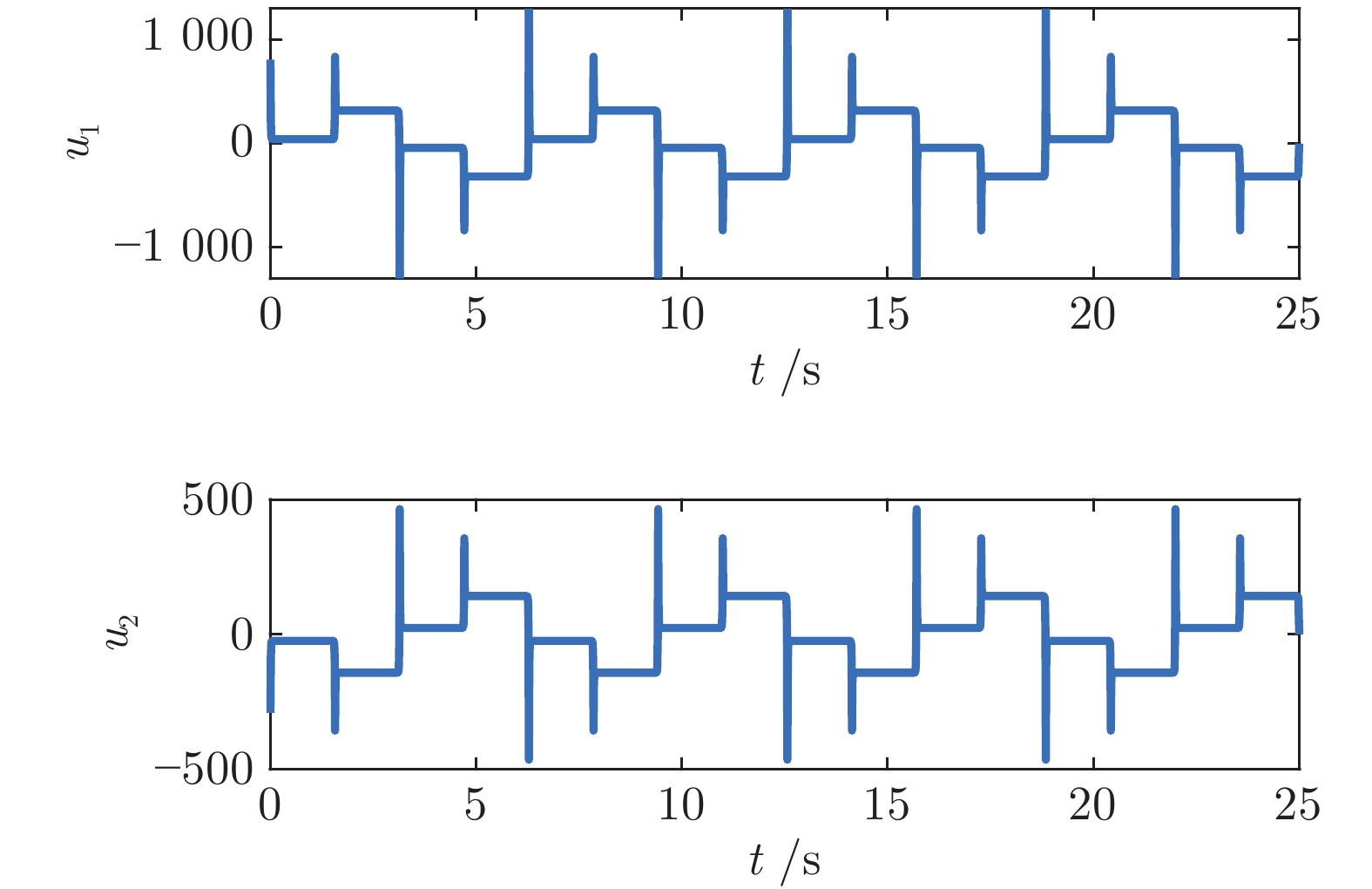
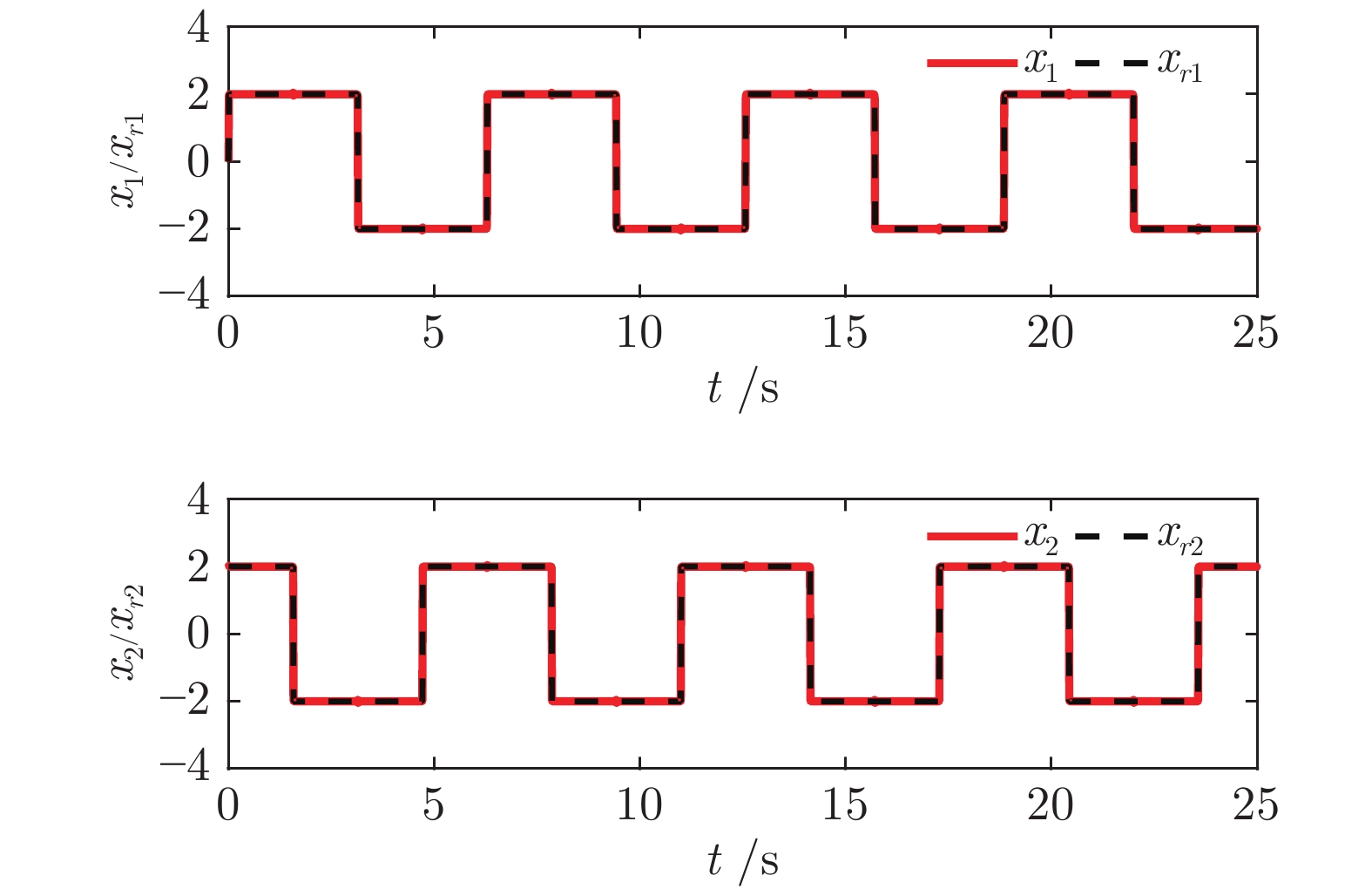
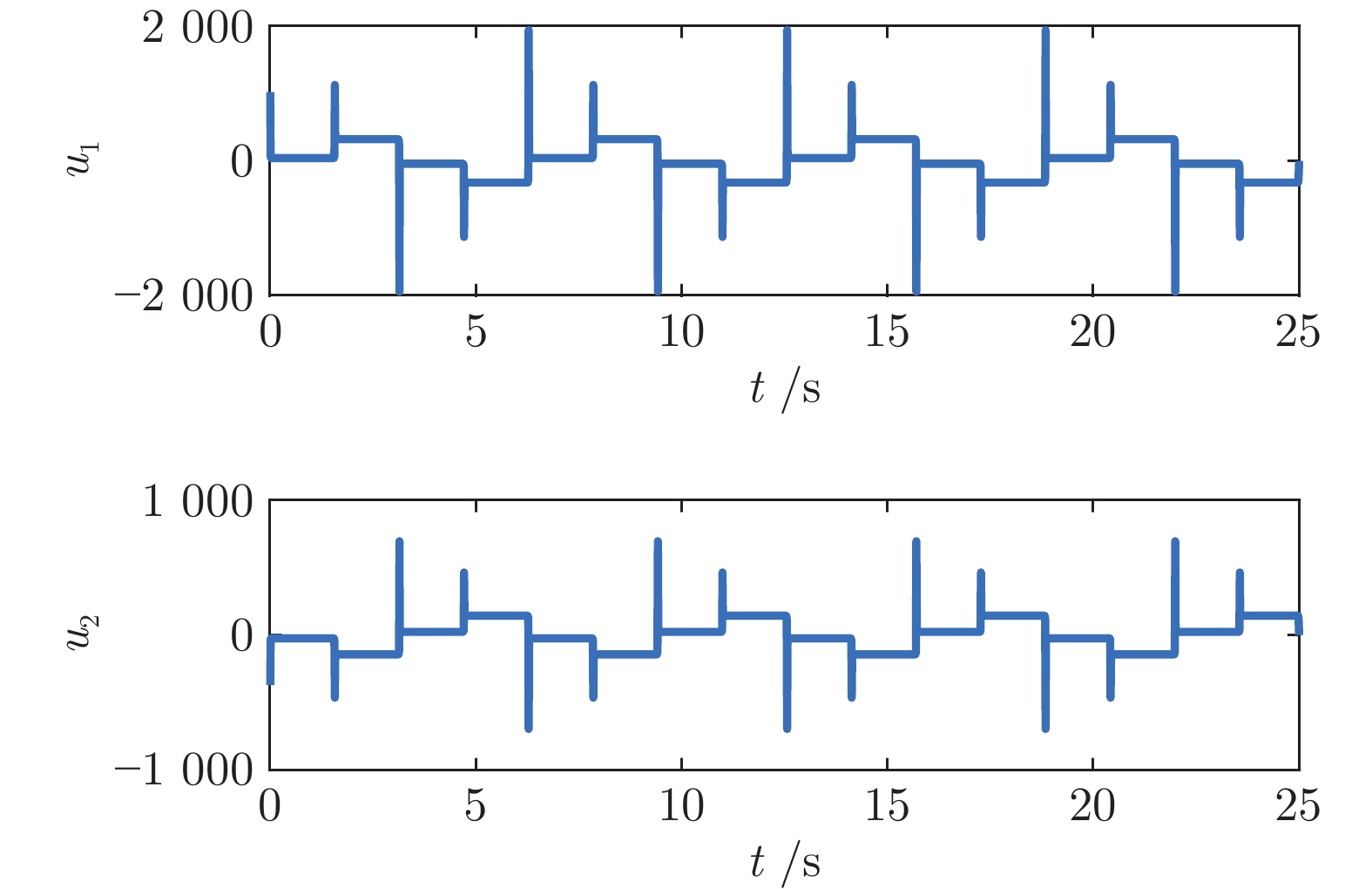
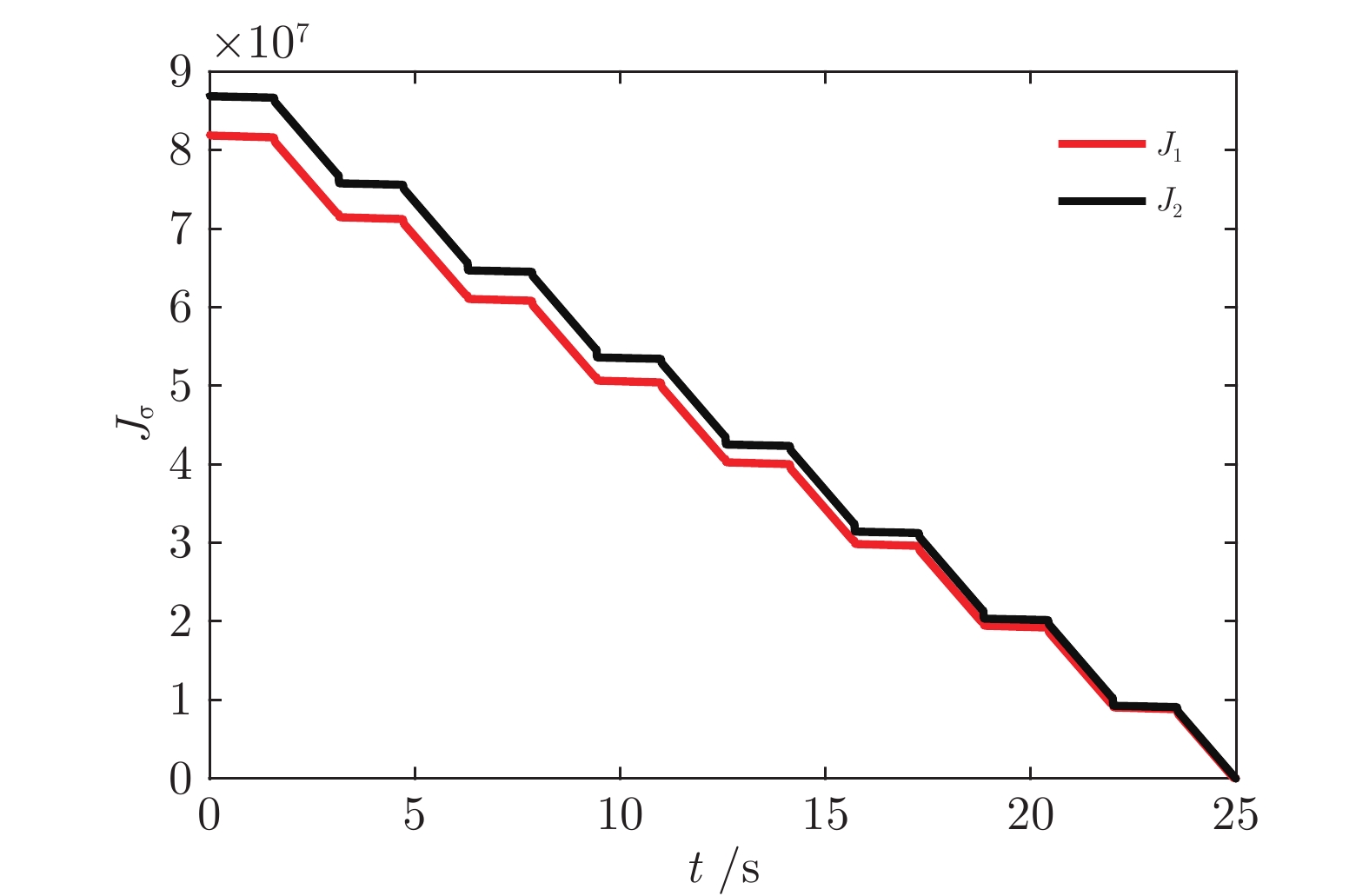
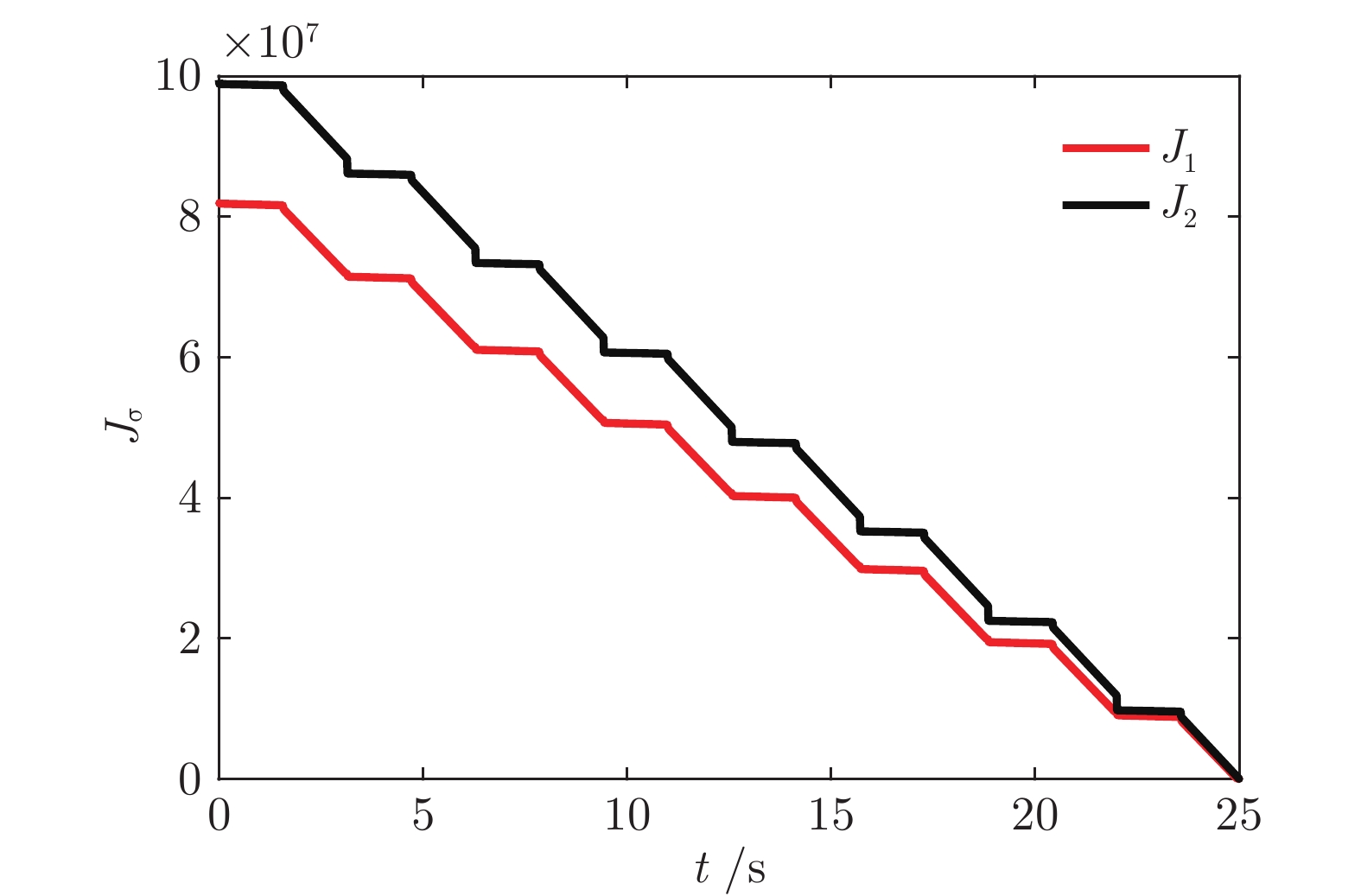
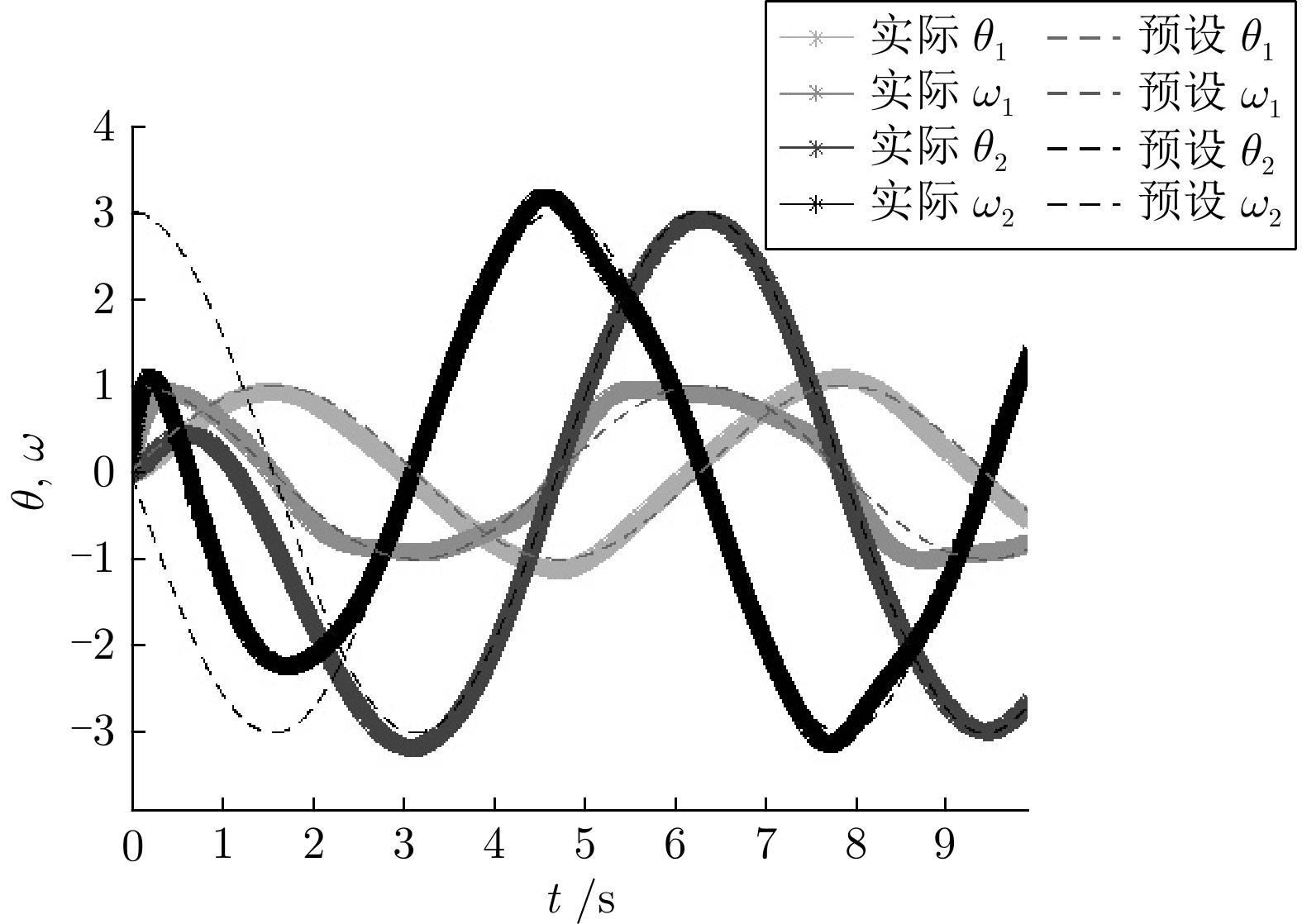
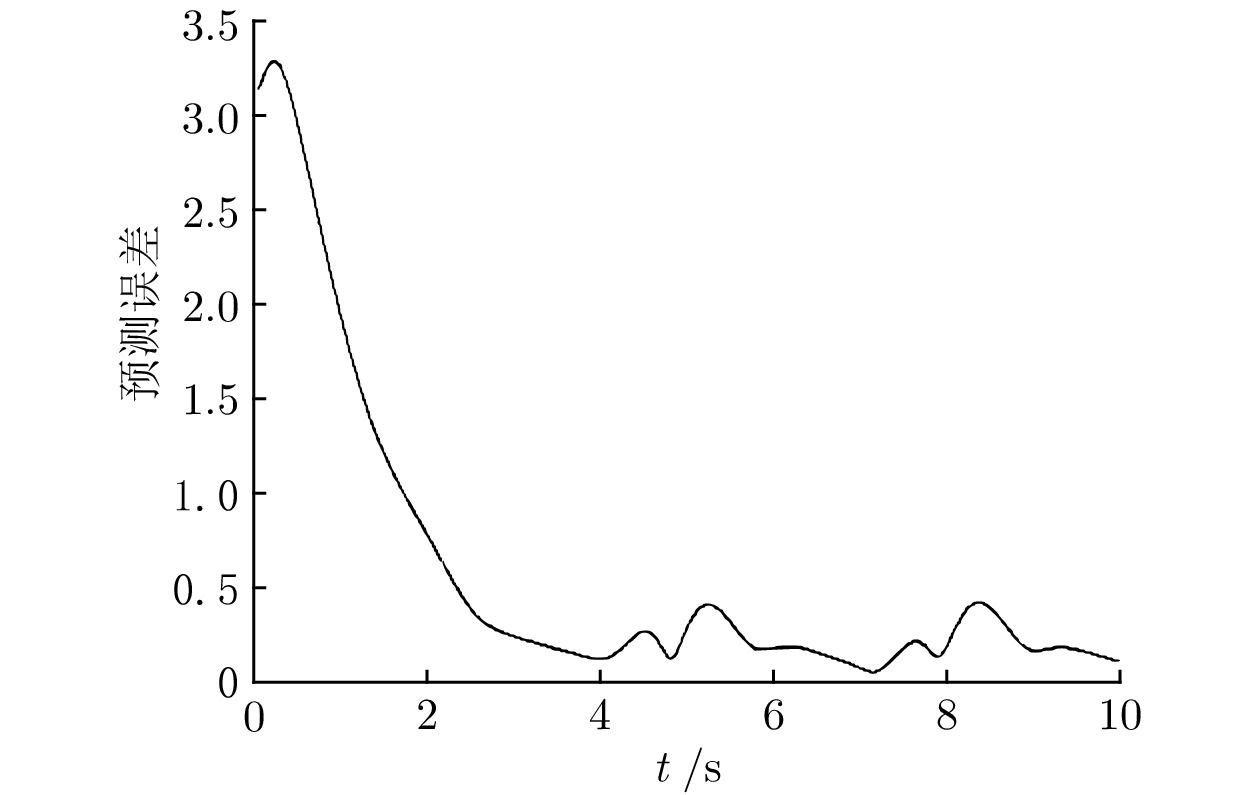
在传统线性二次跟踪控制方法的基础上, 针对一类具有强耦合特性的离散时间线性多变量系统, 提出了一种具有解耦性能的最优跟踪控制方法. 首先为实现解耦, 将耦合项作为可测干扰, 基于零和博弈思想提出了一种新的性能指标; 然后针对该性能指标, 利用极小值原理设计最优跟踪控制器, 通过适当加权矩阵的选择, 同步实现解耦和跟踪; 最后进行仿真实验, 仿真结果表明了该方法的有效性以及在最优性能等方面的优越性.
在传统线性二次跟踪控制方法的基础上, 针对一类具有强耦合特性的离散时间线性多变量系统, 提出了一种具有解耦性能的最优跟踪控制方法. 首先为实现解耦, 将耦合项作为可测干扰, 基于零和博弈思想提出了一种新的性能指标; 然后针对该性能指标, 利用极小值原理设计最优跟踪控制器, 通过适当加权矩阵的选择, 同步实现解耦和跟踪; 最后进行仿真实验, 仿真结果表明了该方法的有效性以及在最优性能等方面的优越性.
2022, 48(8): 1940-1949.
doi: 10.16383/j.aas.c190445
摘要:
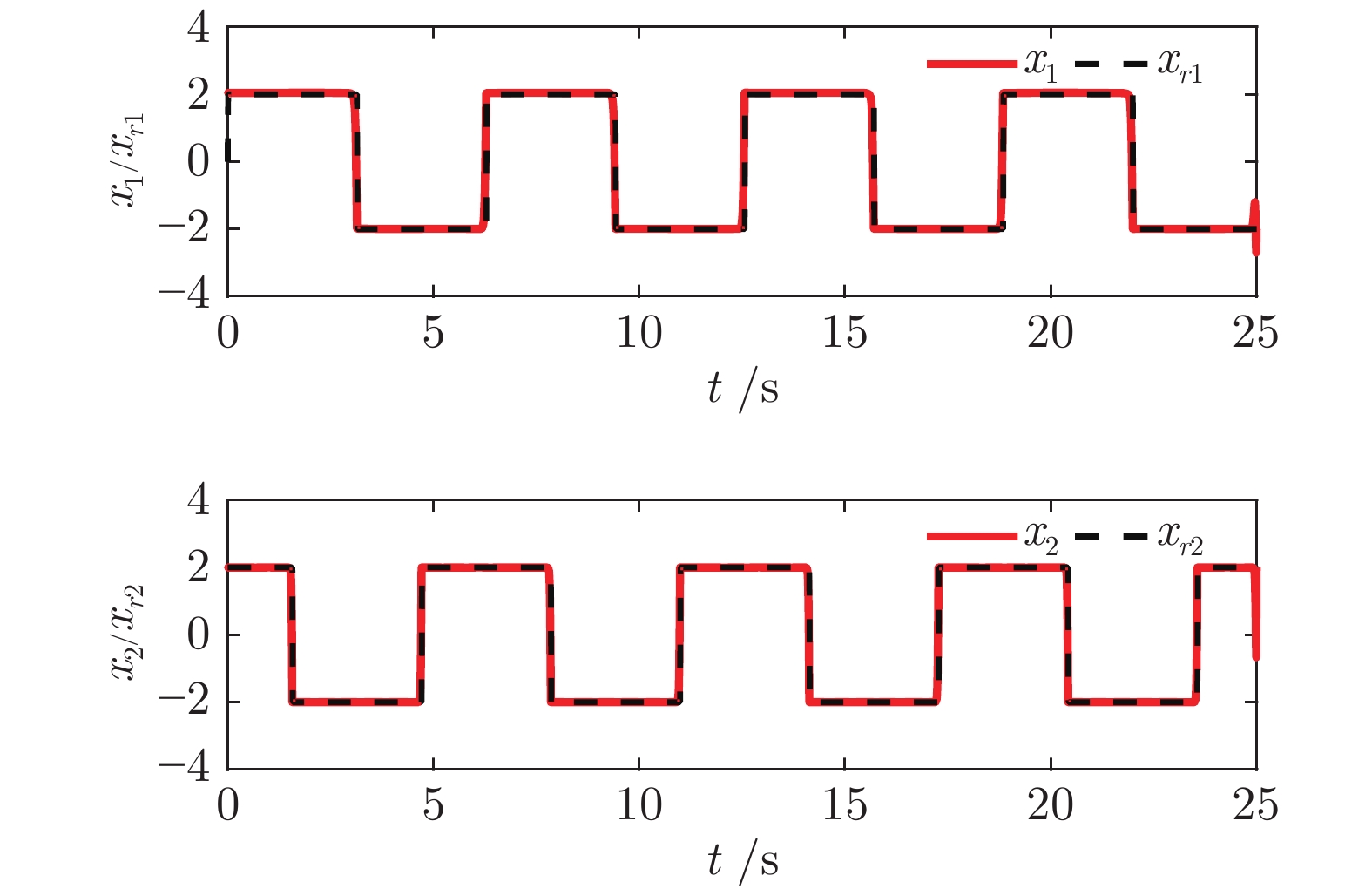
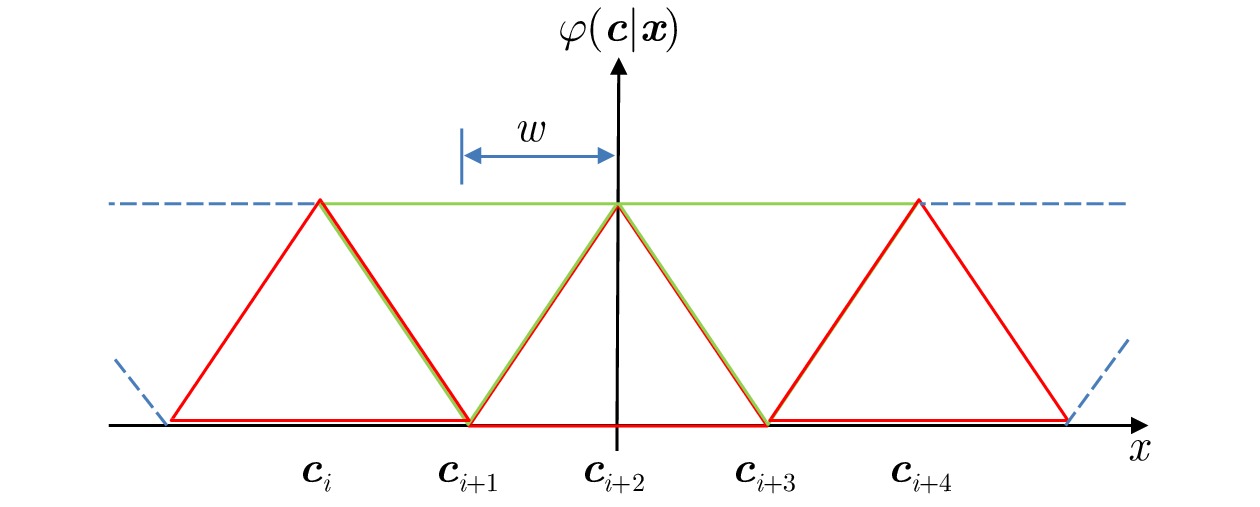
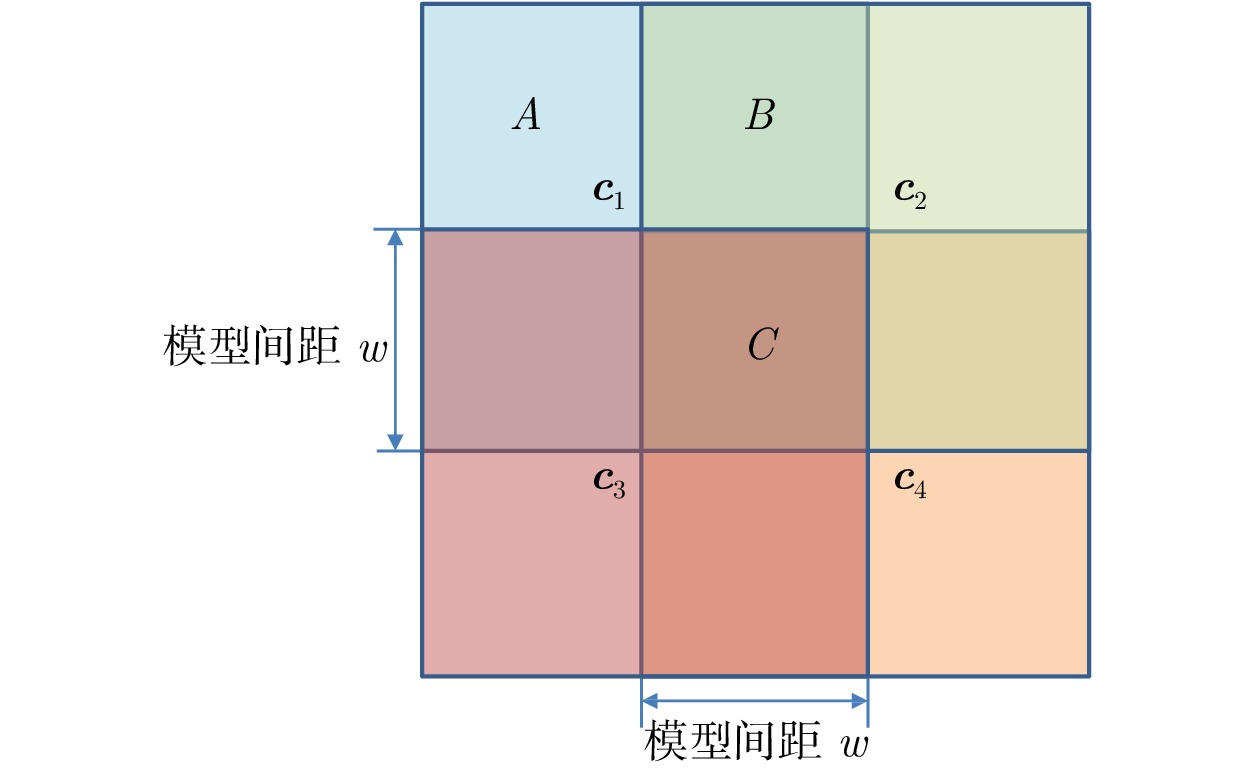
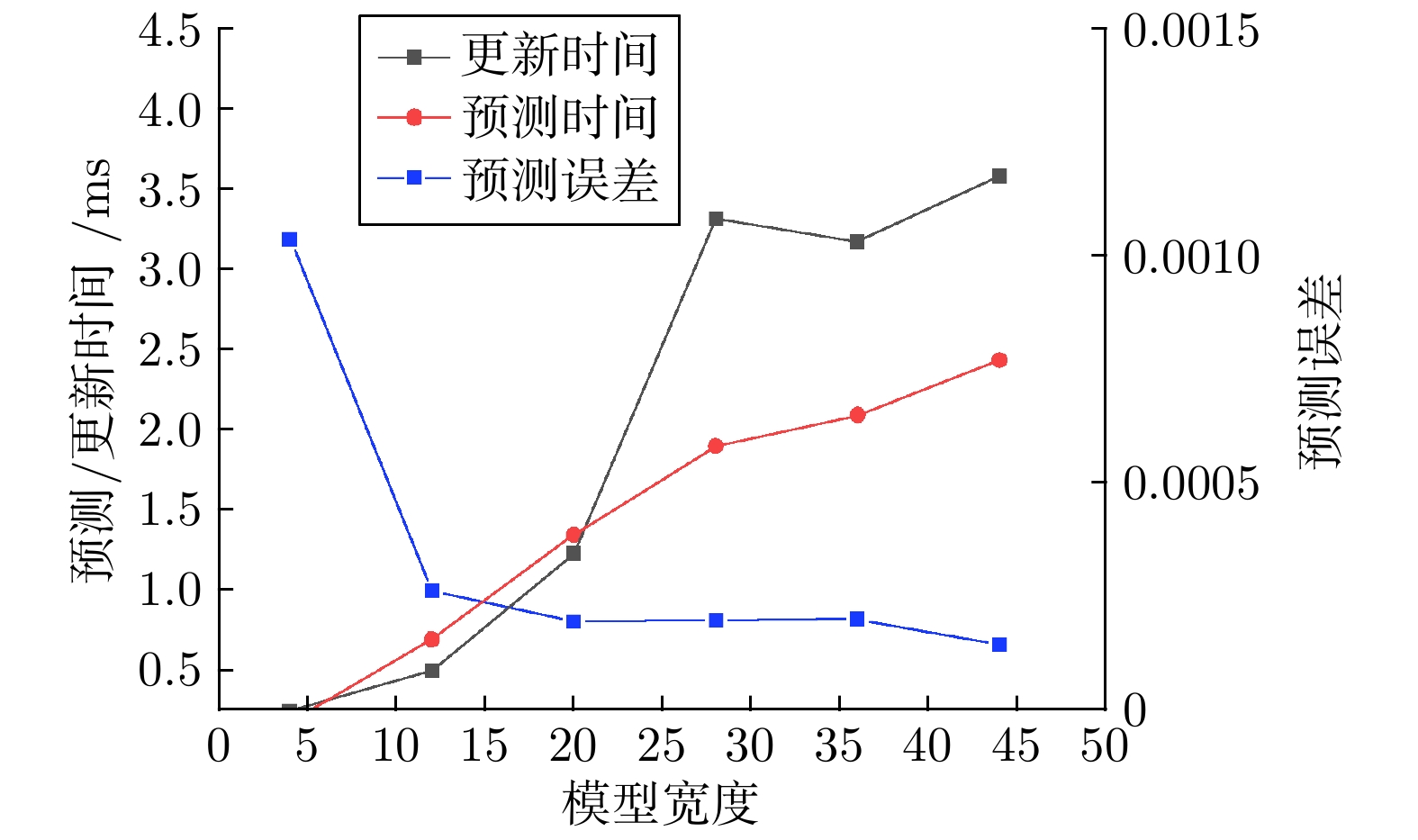
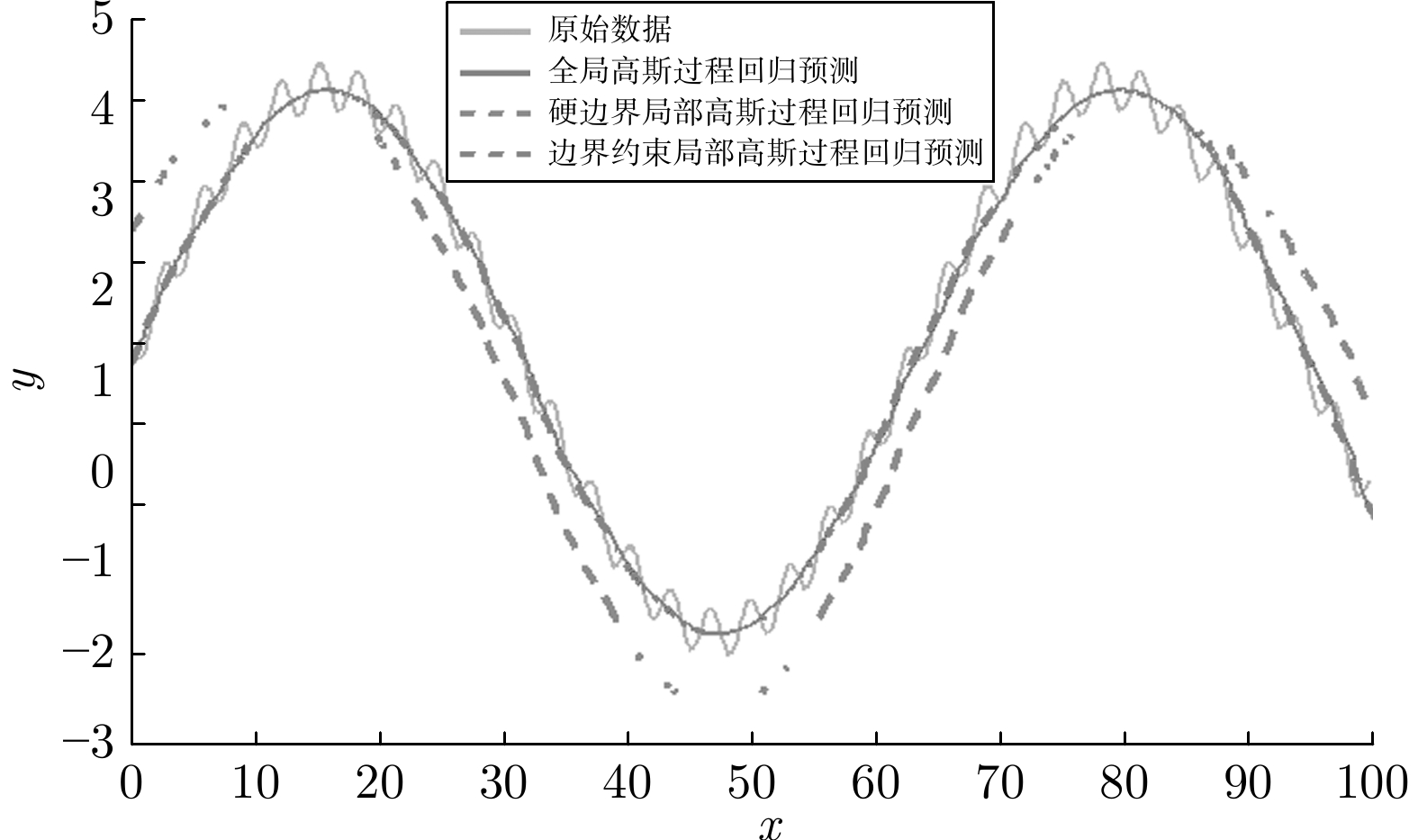
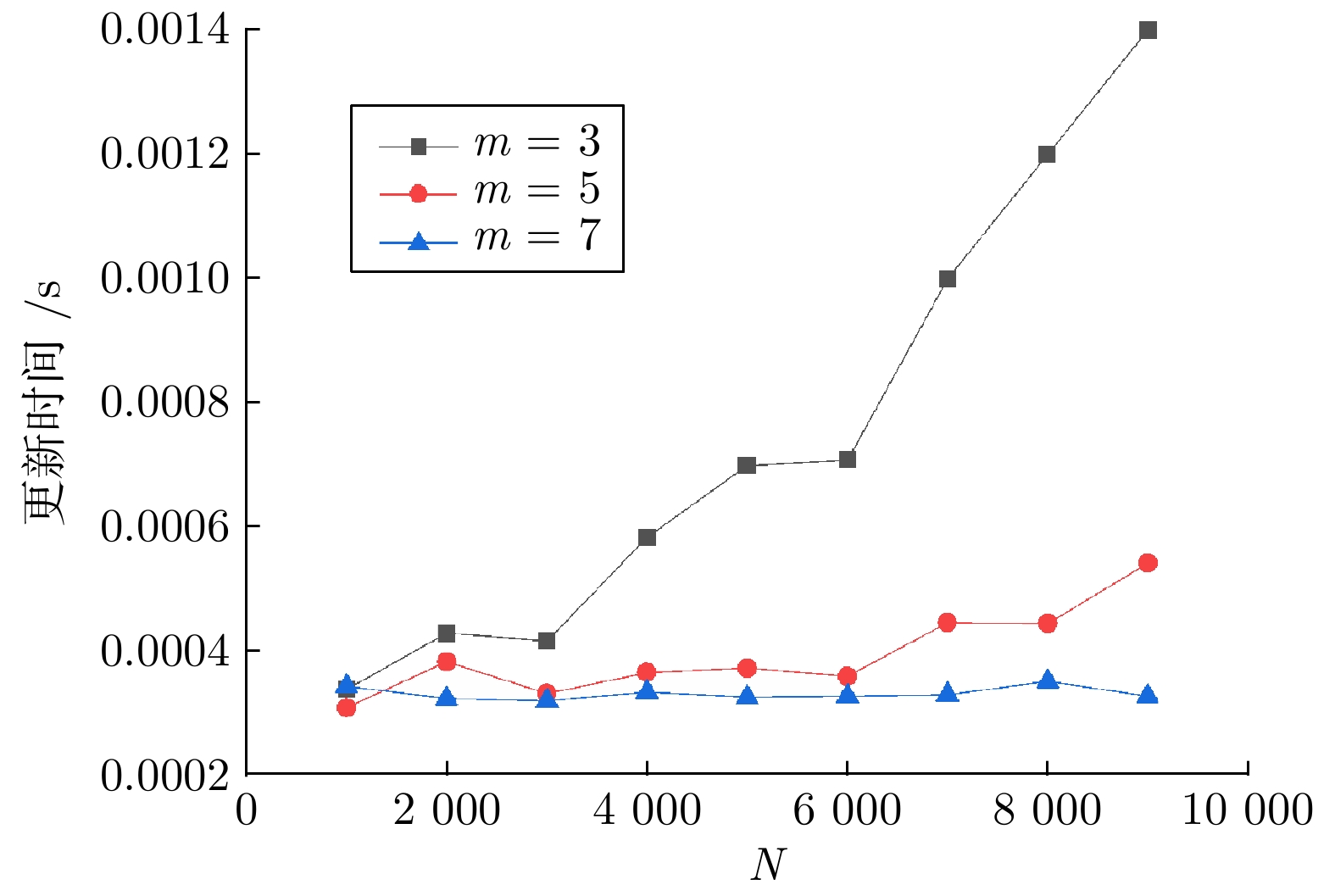
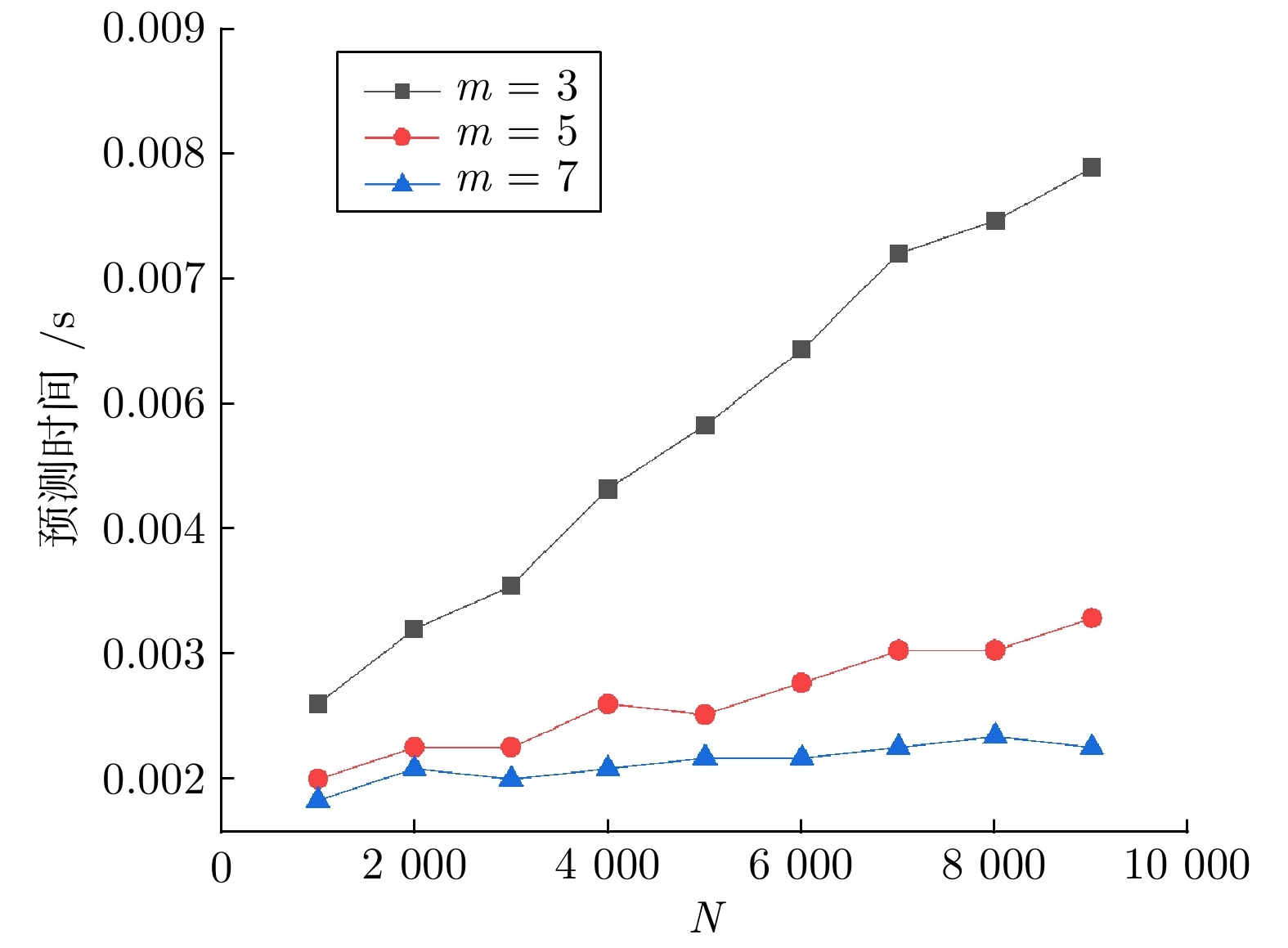
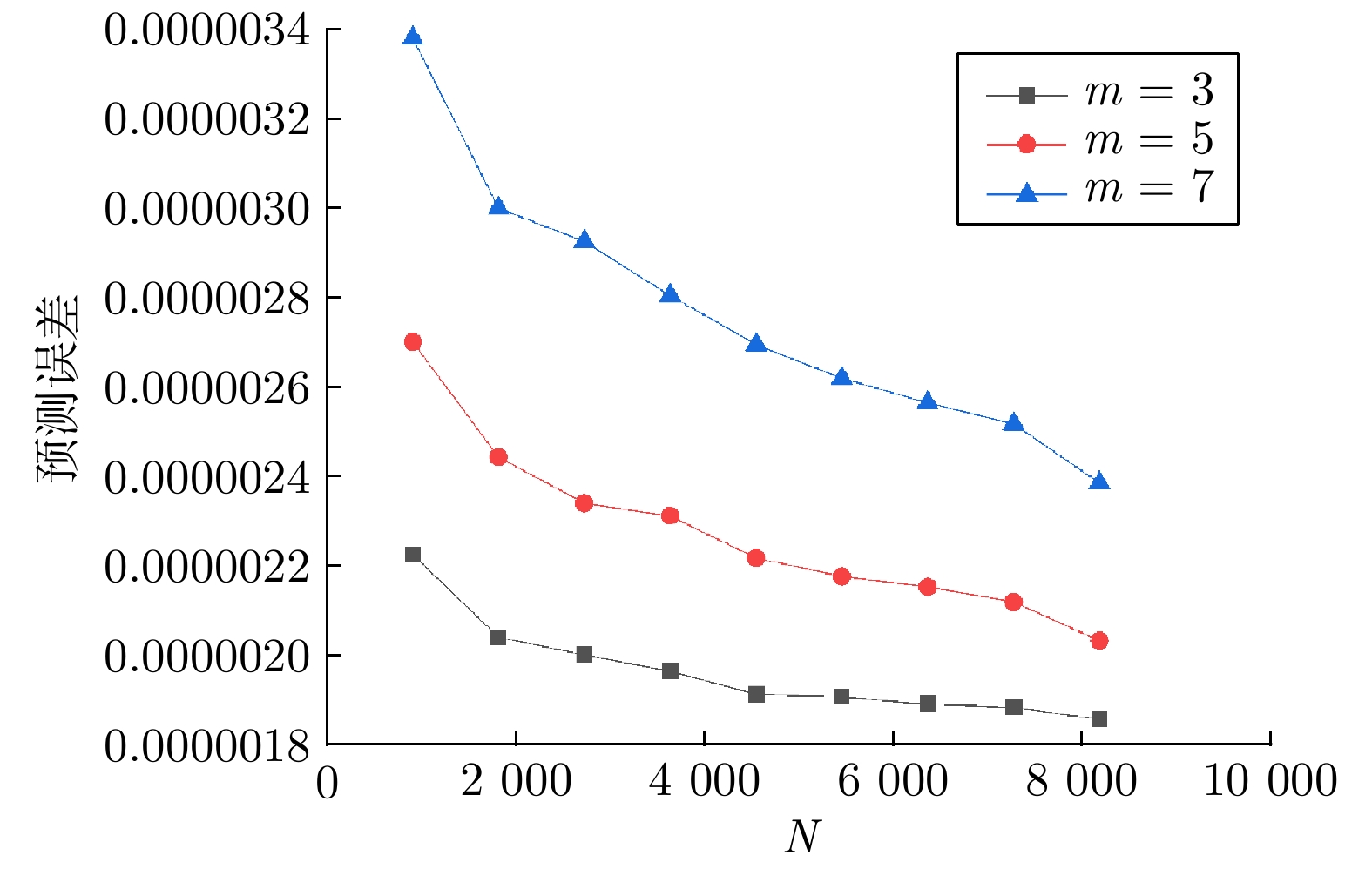
在针对控制和机器人的机器学习任务中, 高斯过程回归是一种常用方法, 具有无参数学习技术的优点. 然而, 它在面对大量训练数据时存在计算量大的缺点, 因此并不适用于实时更新模型的情况. 为了减少这种计算量, 使模型能够通过实时产生的大量数据不断更新, 本文提出了一种基于概率关联的局部高斯过程回归算法. 与其他局部回归模型相比, 该算法通过对多维局部空间模型边界的平滑处理, 使用紧凑支持的概率分布来划分局部模型中的数据, 得到了更好的预测精度. 另外, 还对更新预测矢量的计算方法进行了改进, 并使用k-d树最近邻搜索减少数据分配和预测的时间. 实验证明, 该算法在保持全局高斯过程回归预测精度的同时, 显著提升了计算效率, 并且预测精度远高于其他局部高斯过程回归模型. 该模型能够快速更新和预测, 满足工程中的在线学习的需求.
在针对控制和机器人的机器学习任务中, 高斯过程回归是一种常用方法, 具有无参数学习技术的优点. 然而, 它在面对大量训练数据时存在计算量大的缺点, 因此并不适用于实时更新模型的情况. 为了减少这种计算量, 使模型能够通过实时产生的大量数据不断更新, 本文提出了一种基于概率关联的局部高斯过程回归算法. 与其他局部回归模型相比, 该算法通过对多维局部空间模型边界的平滑处理, 使用紧凑支持的概率分布来划分局部模型中的数据, 得到了更好的预测精度. 另外, 还对更新预测矢量的计算方法进行了改进, 并使用k-d树最近邻搜索减少数据分配和预测的时间. 实验证明, 该算法在保持全局高斯过程回归预测精度的同时, 显著提升了计算效率, 并且预测精度远高于其他局部高斯过程回归模型. 该模型能够快速更新和预测, 满足工程中的在线学习的需求.
2022, 48(8): 1950-1960.
doi: 10.16383/j.aas.c200035
摘要:
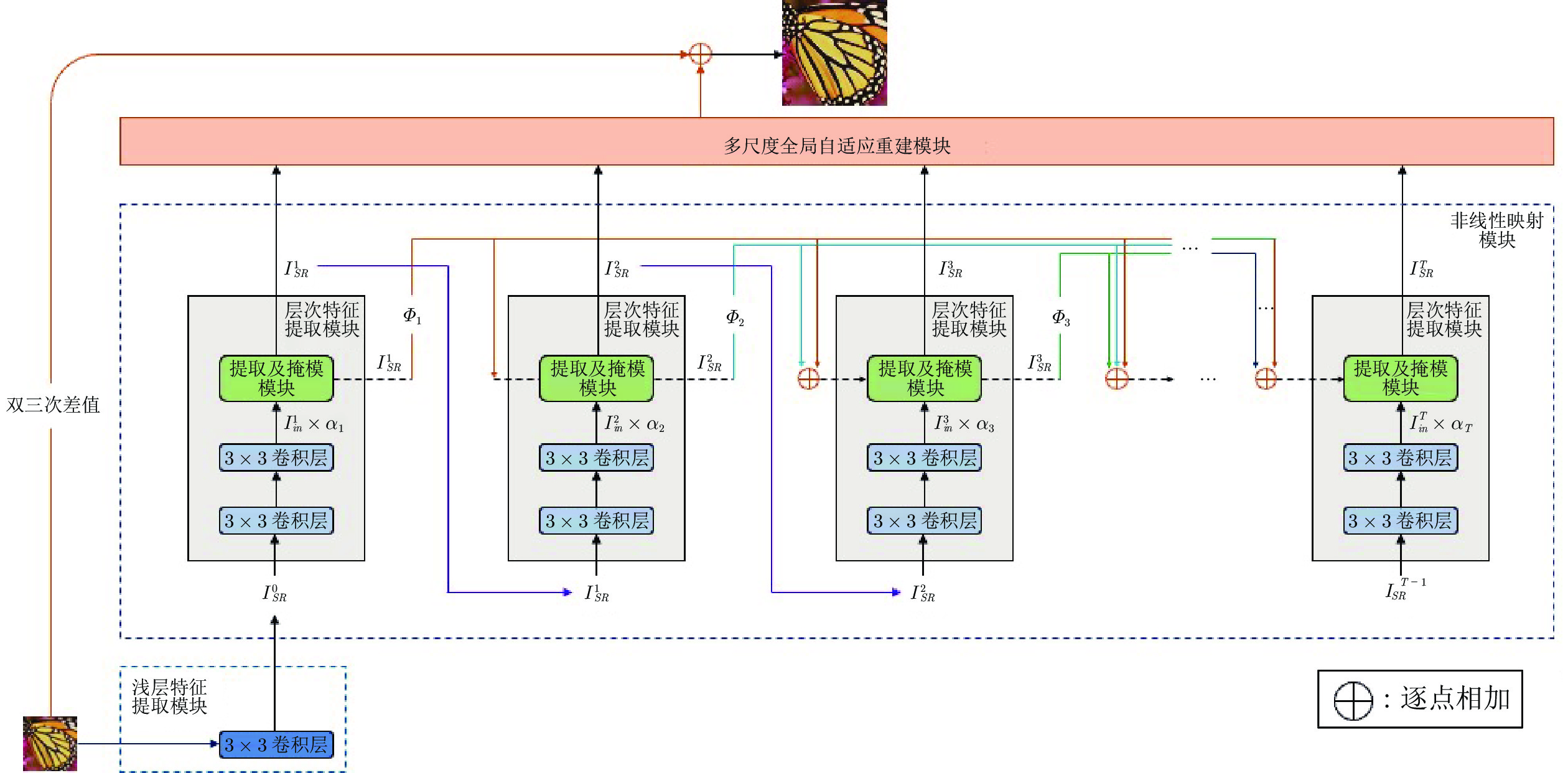
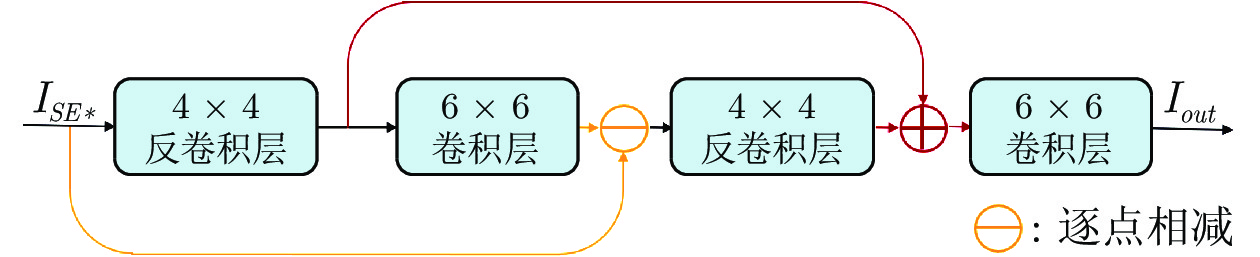
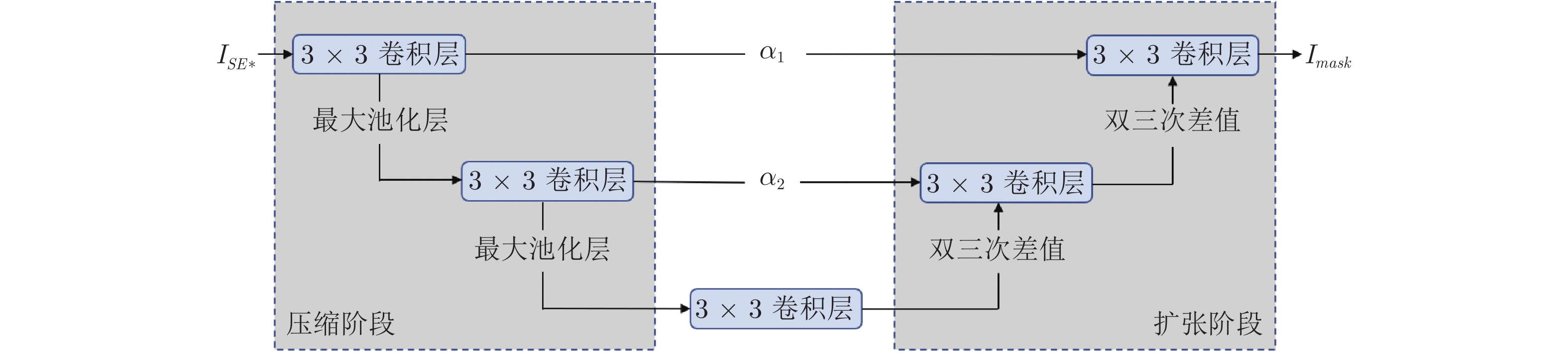
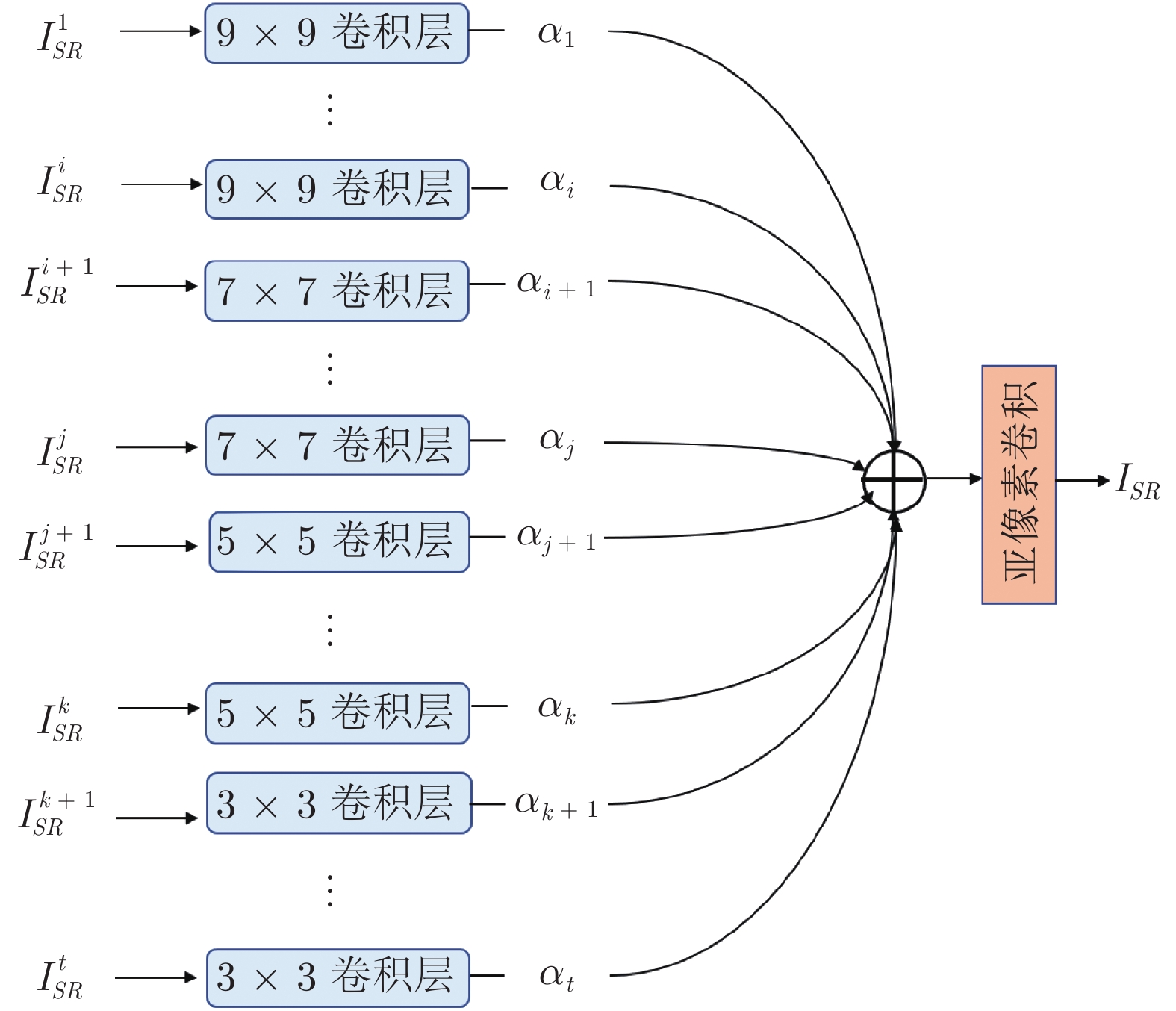
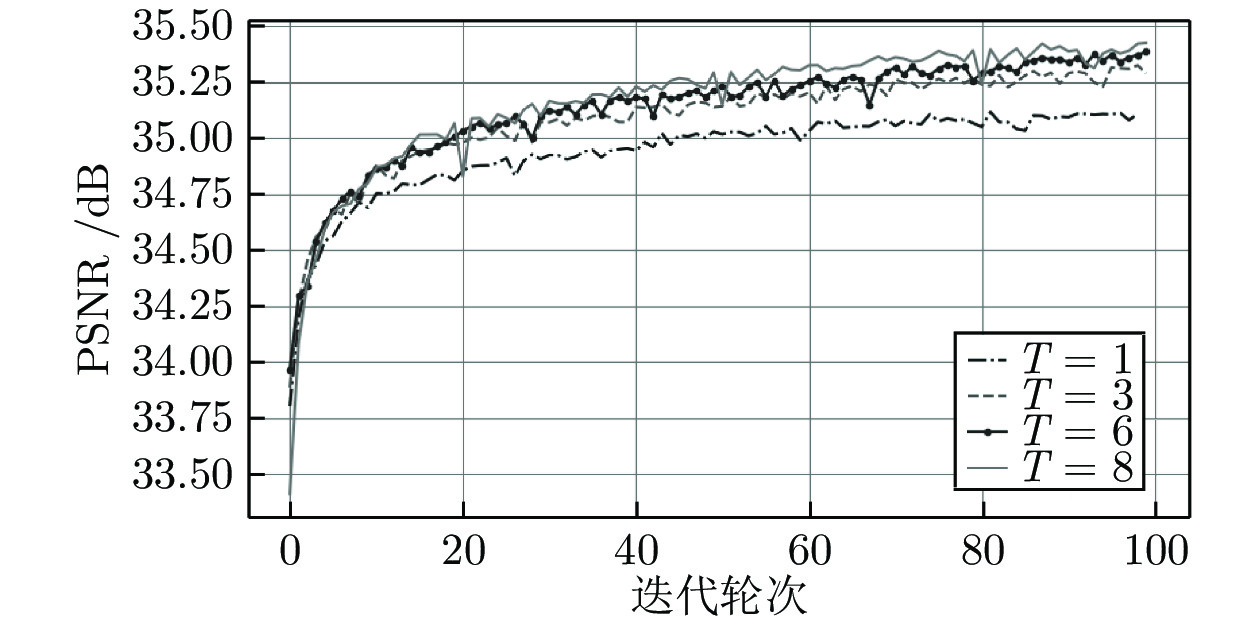
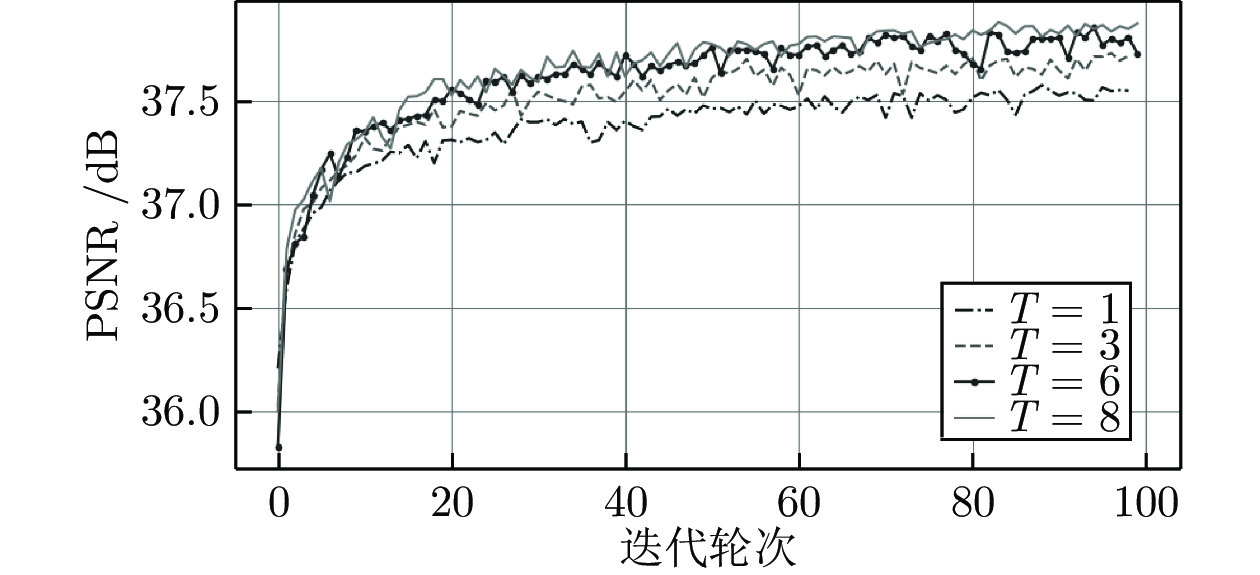
深度卷积神经网络显著提升了单图像超分辨率的性能. 通常, 网络越深, 性能越好. 然而加深网络往往会急剧增加参数量和计算负荷, 限制了在资源受限的移动设备上的应用. 提出一个基于轻量级自适应级联的注意力网络的单图像超分辨率方法. 特别地提出了局部像素级注意力模块, 给输入特征的每一个特征通道上的像素点都赋以不同的权值, 从而为重建高质量图像选取更精确的高频信息. 此外, 设计了自适应的级联残差连接, 可以自适应地结合网络产生的层次特征, 能够更好地进行特征重用. 最后, 为了充分利用网络产生的信息, 提出了多尺度全局自适应重建模块. 多尺度全局自适应重建模块使用不同大小的卷积核处理网络在不同深度处产生的信息, 提高了重建质量. 与当前最好的类似方法相比, 该方法的参数量更小, 客观和主观度量显著更好.
深度卷积神经网络显著提升了单图像超分辨率的性能. 通常, 网络越深, 性能越好. 然而加深网络往往会急剧增加参数量和计算负荷, 限制了在资源受限的移动设备上的应用. 提出一个基于轻量级自适应级联的注意力网络的单图像超分辨率方法. 特别地提出了局部像素级注意力模块, 给输入特征的每一个特征通道上的像素点都赋以不同的权值, 从而为重建高质量图像选取更精确的高频信息. 此外, 设计了自适应的级联残差连接, 可以自适应地结合网络产生的层次特征, 能够更好地进行特征重用. 最后, 为了充分利用网络产生的信息, 提出了多尺度全局自适应重建模块. 多尺度全局自适应重建模块使用不同大小的卷积核处理网络在不同深度处产生的信息, 提高了重建质量. 与当前最好的类似方法相比, 该方法的参数量更小, 客观和主观度量显著更好.



2022, 48(8): 1961-1971.
doi: 10.16383/j.aas.c201019
摘要:
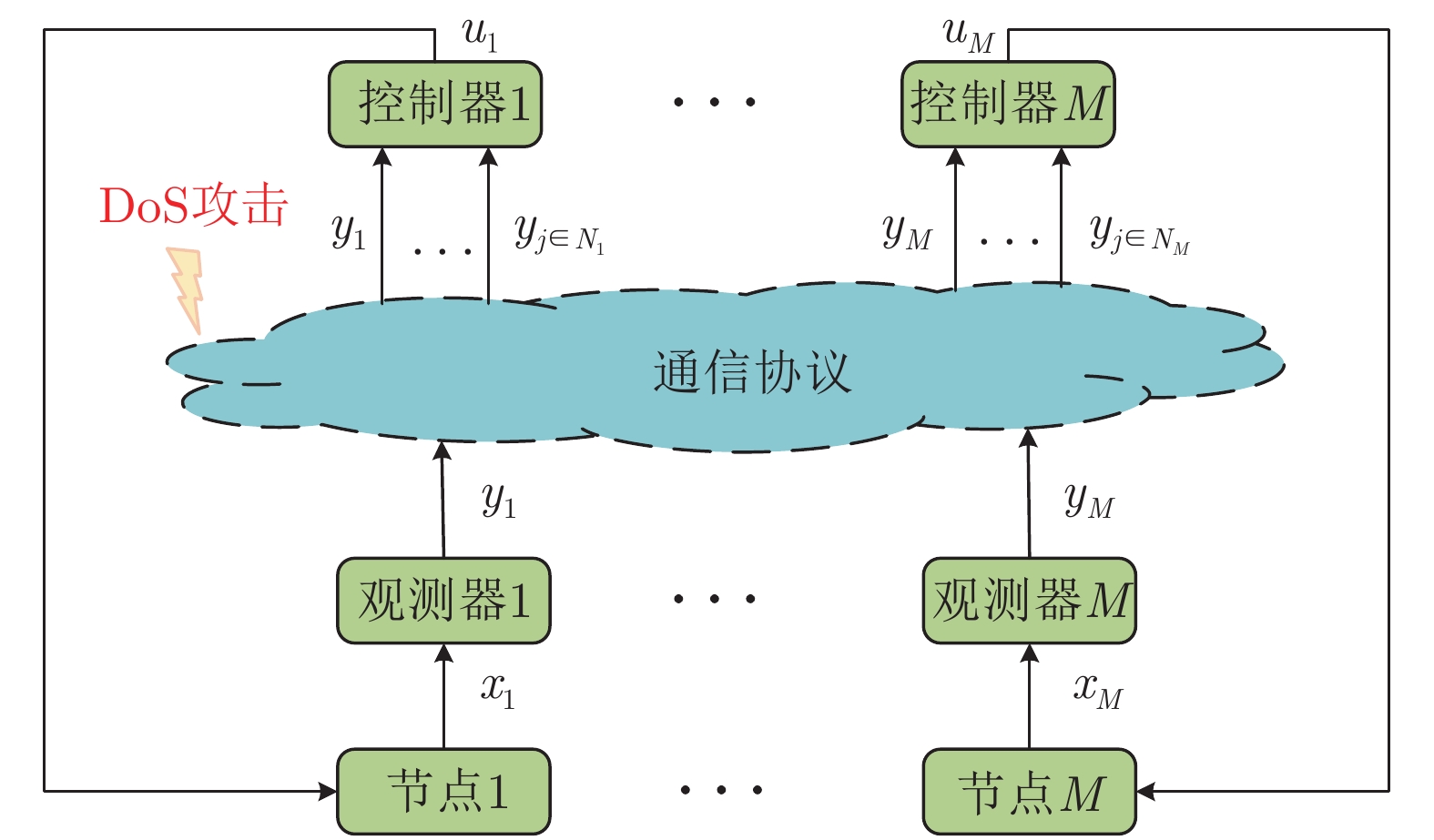
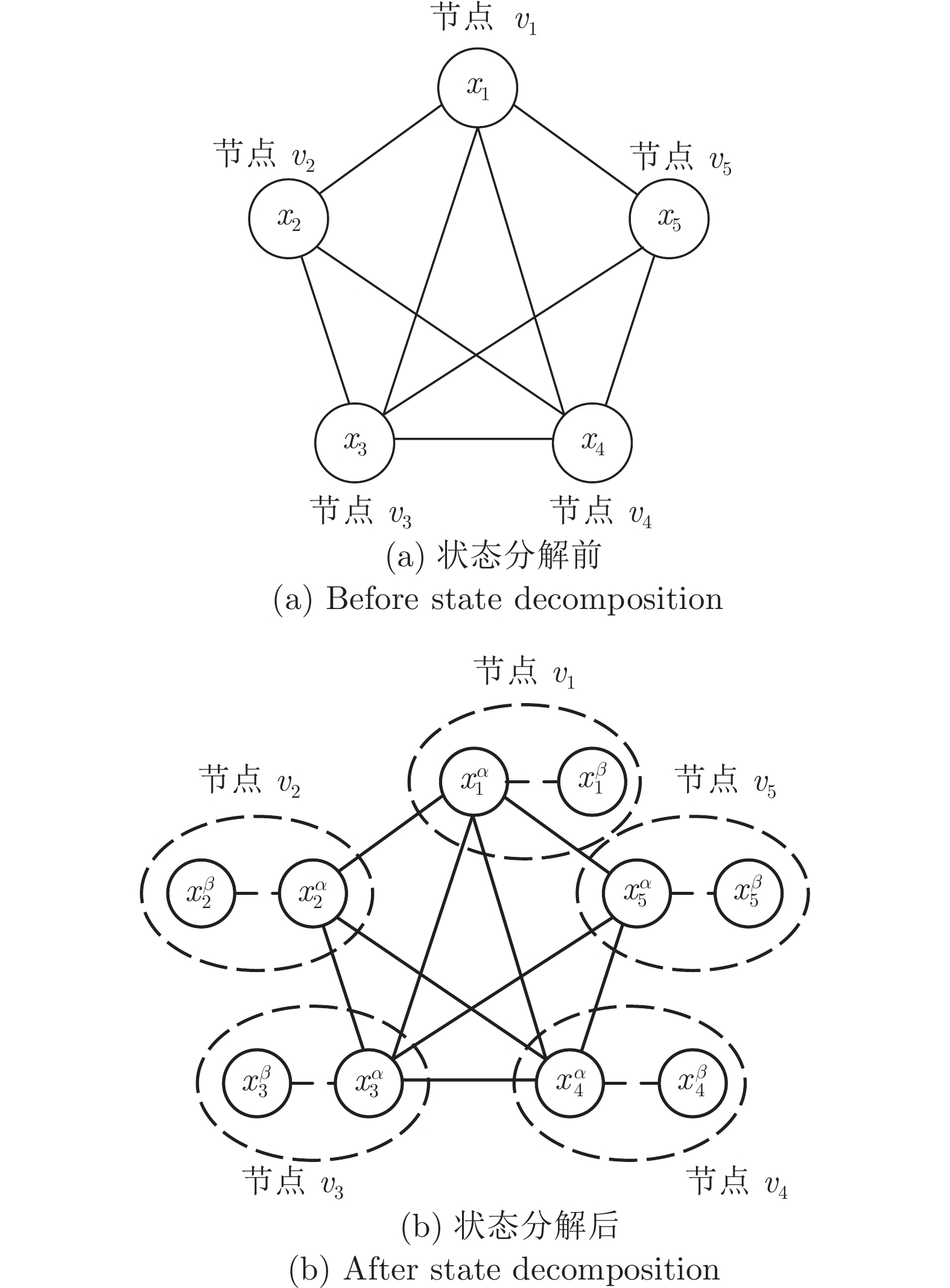
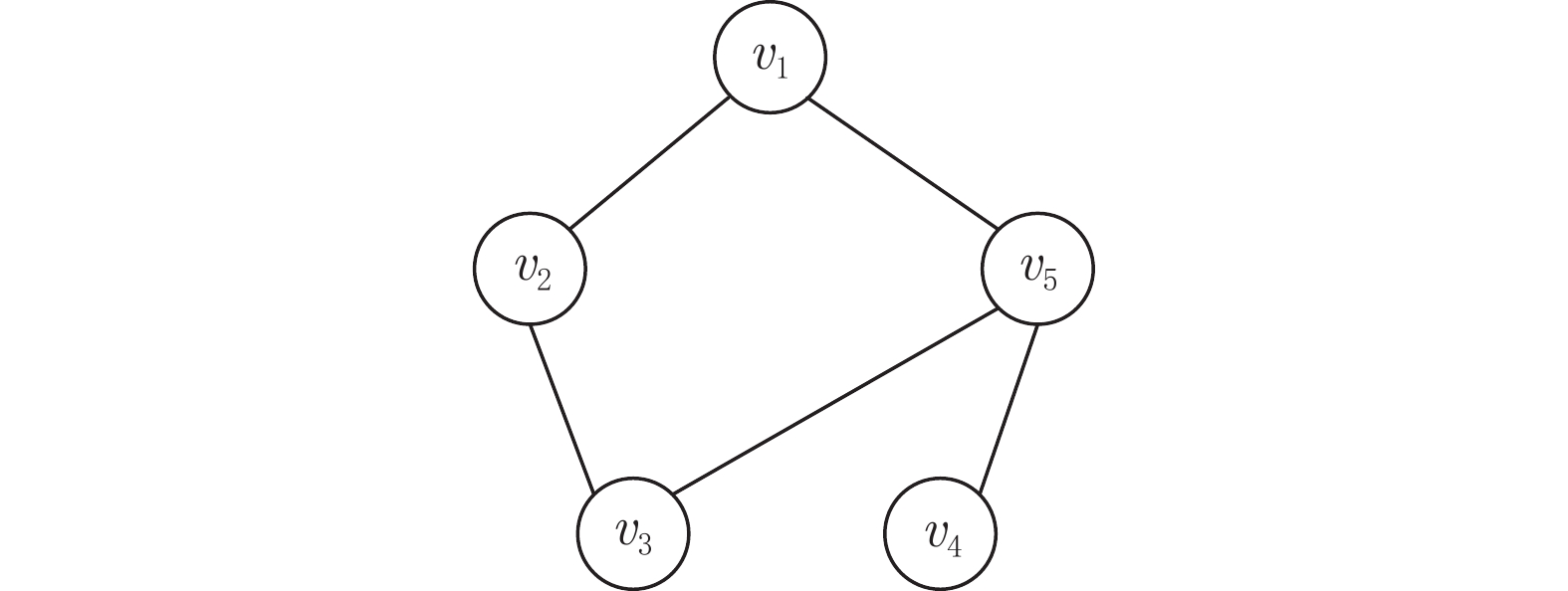
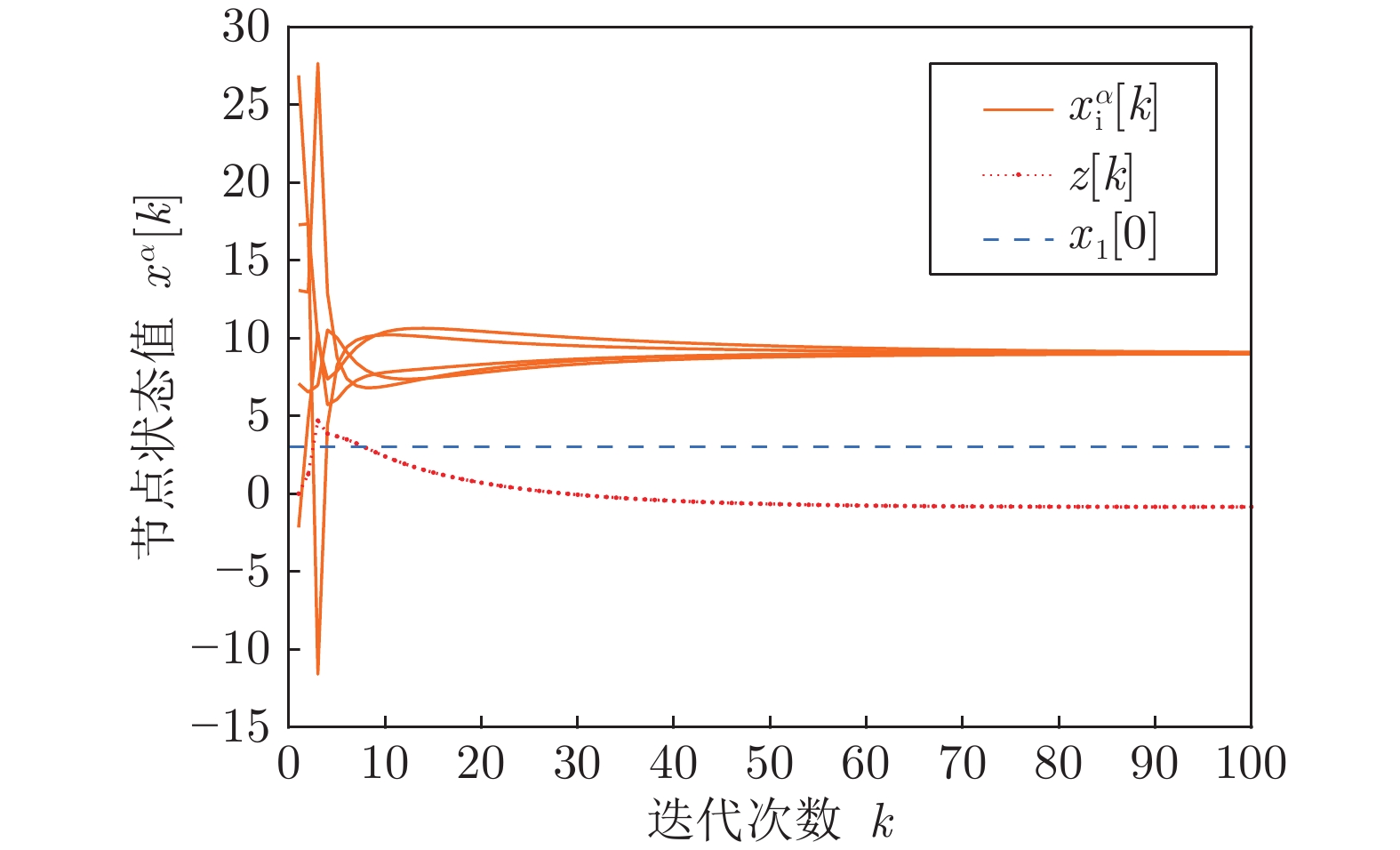
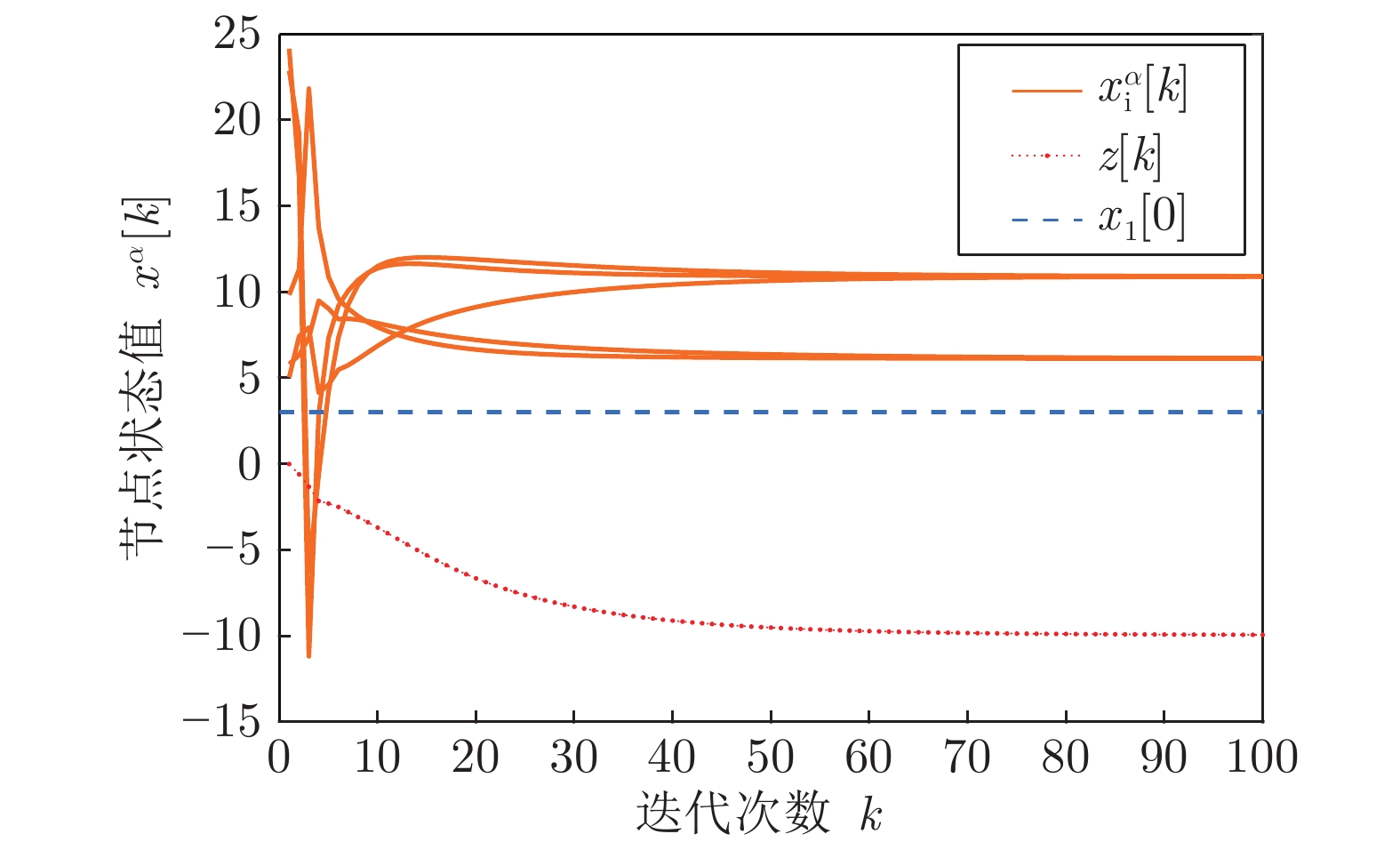
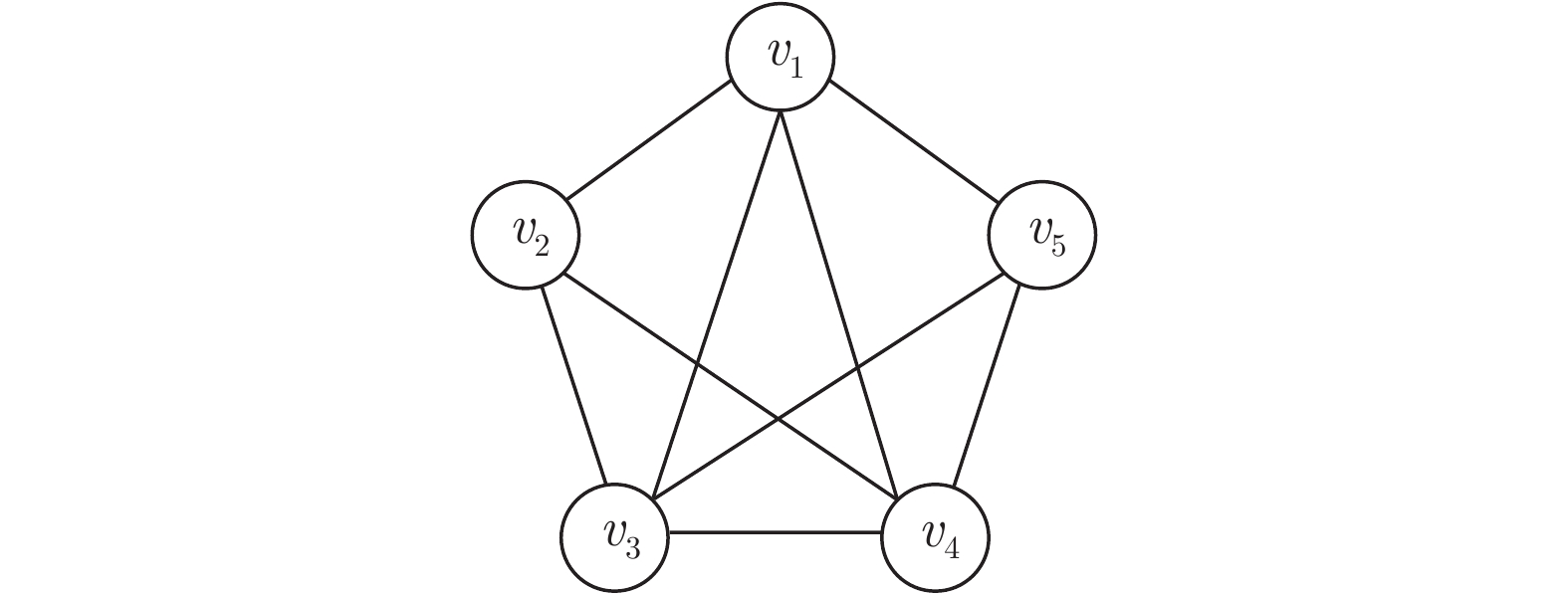
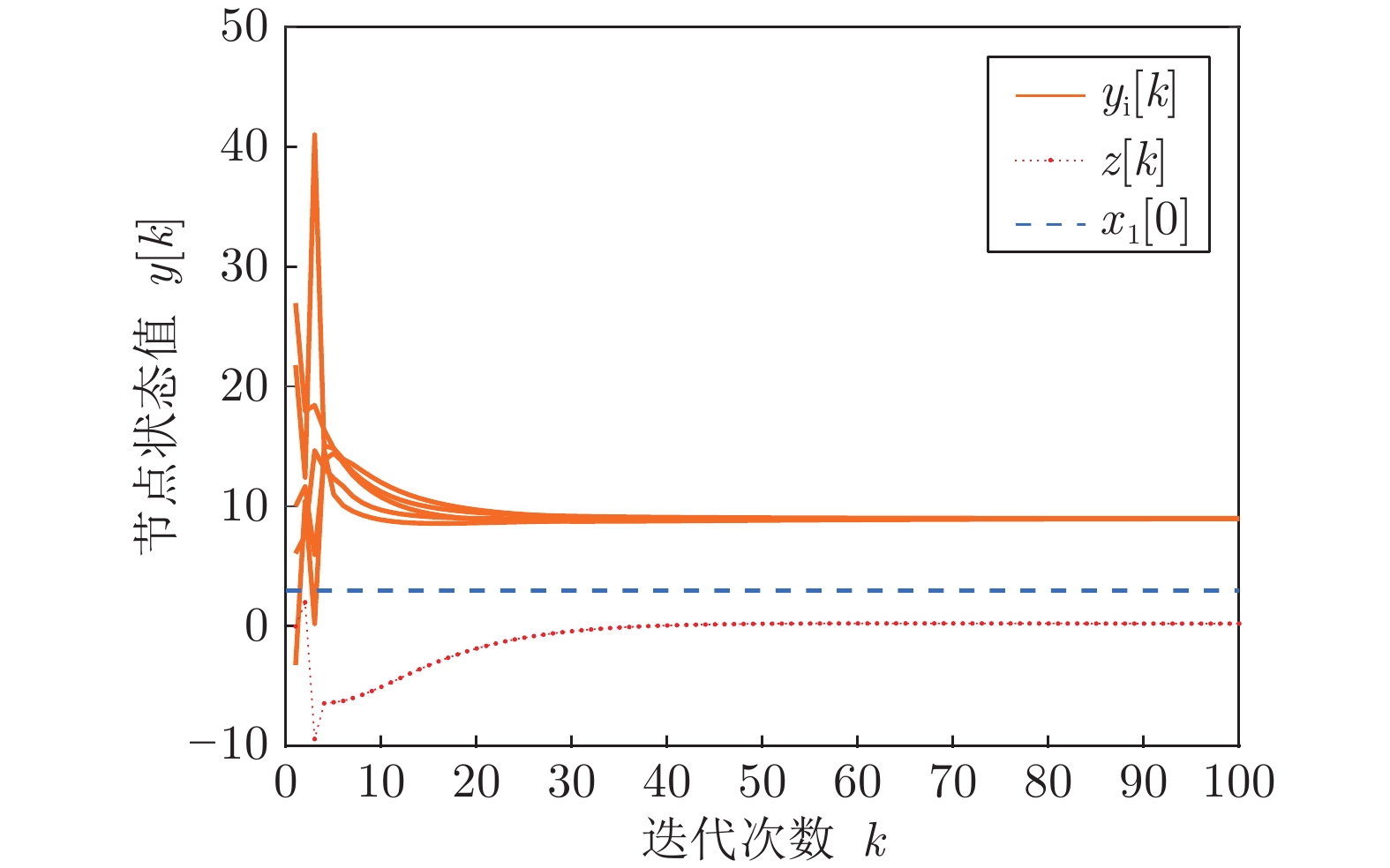
均值趋同是一种广泛应用于分布式计算和控制的算法, 旨在系统通过相邻节点间信息交互、更新, 最终促使系统中所有节点以它们初始值的均值达成一致. 研究拒绝服务(Denial-of-service, DoS)攻击下的分布式离散时间多智能体系统均值趋同问题. 首先, 给出一种基于状态分解思想的分布式网络节点状态信息处理机制, 可保证系统中所有节点输出值的隐私. 然后, 利用分解后的节点状态值及分析给出的网络通信拓扑条件, 提出一种适用于无向通信拓扑的多智能体系统均值趋同控制方法. 理论分析表明, 该方法能够有效抵御DoS攻击的影响, 且实现系统输出值均值趋同. 最后, 通过仿真实例验证了该方法的有效性.
均值趋同是一种广泛应用于分布式计算和控制的算法, 旨在系统通过相邻节点间信息交互、更新, 最终促使系统中所有节点以它们初始值的均值达成一致. 研究拒绝服务(Denial-of-service, DoS)攻击下的分布式离散时间多智能体系统均值趋同问题. 首先, 给出一种基于状态分解思想的分布式网络节点状态信息处理机制, 可保证系统中所有节点输出值的隐私. 然后, 利用分解后的节点状态值及分析给出的网络通信拓扑条件, 提出一种适用于无向通信拓扑的多智能体系统均值趋同控制方法. 理论分析表明, 该方法能够有效抵御DoS攻击的影响, 且实现系统输出值均值趋同. 最后, 通过仿真实例验证了该方法的有效性.
2022, 48(8): 1972-1983.
doi: 10.16383/j.aas.c200660
摘要:
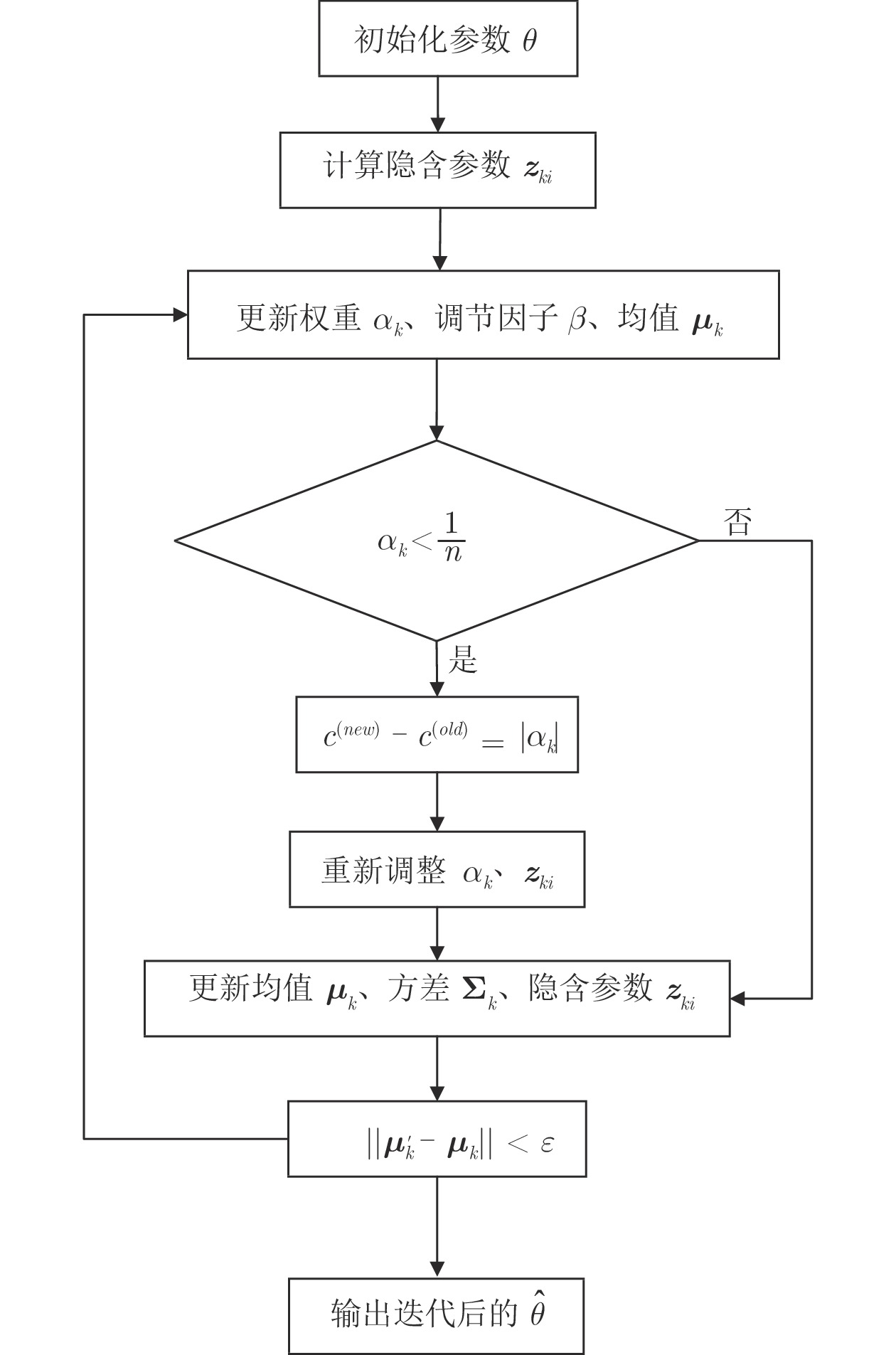
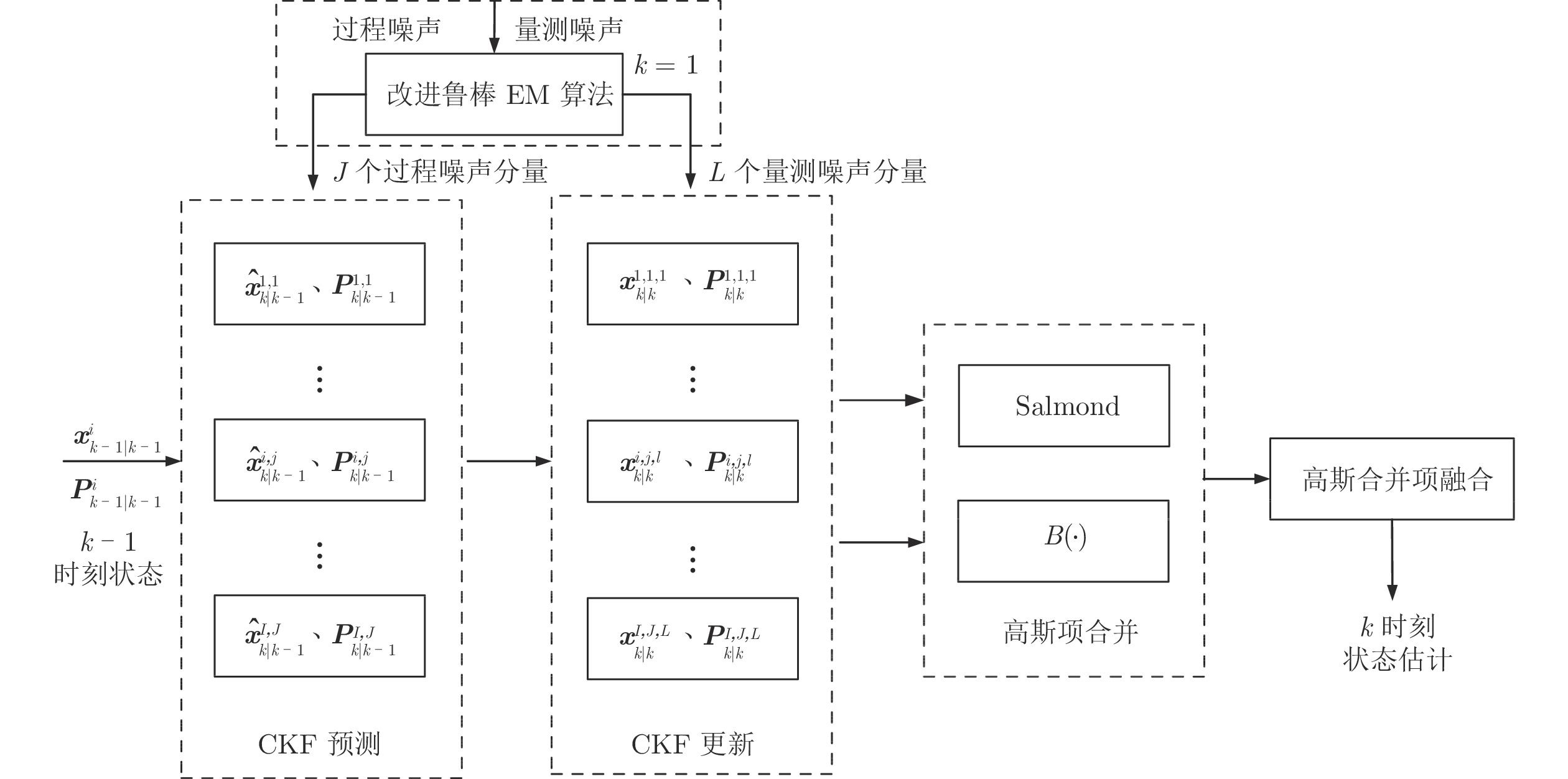
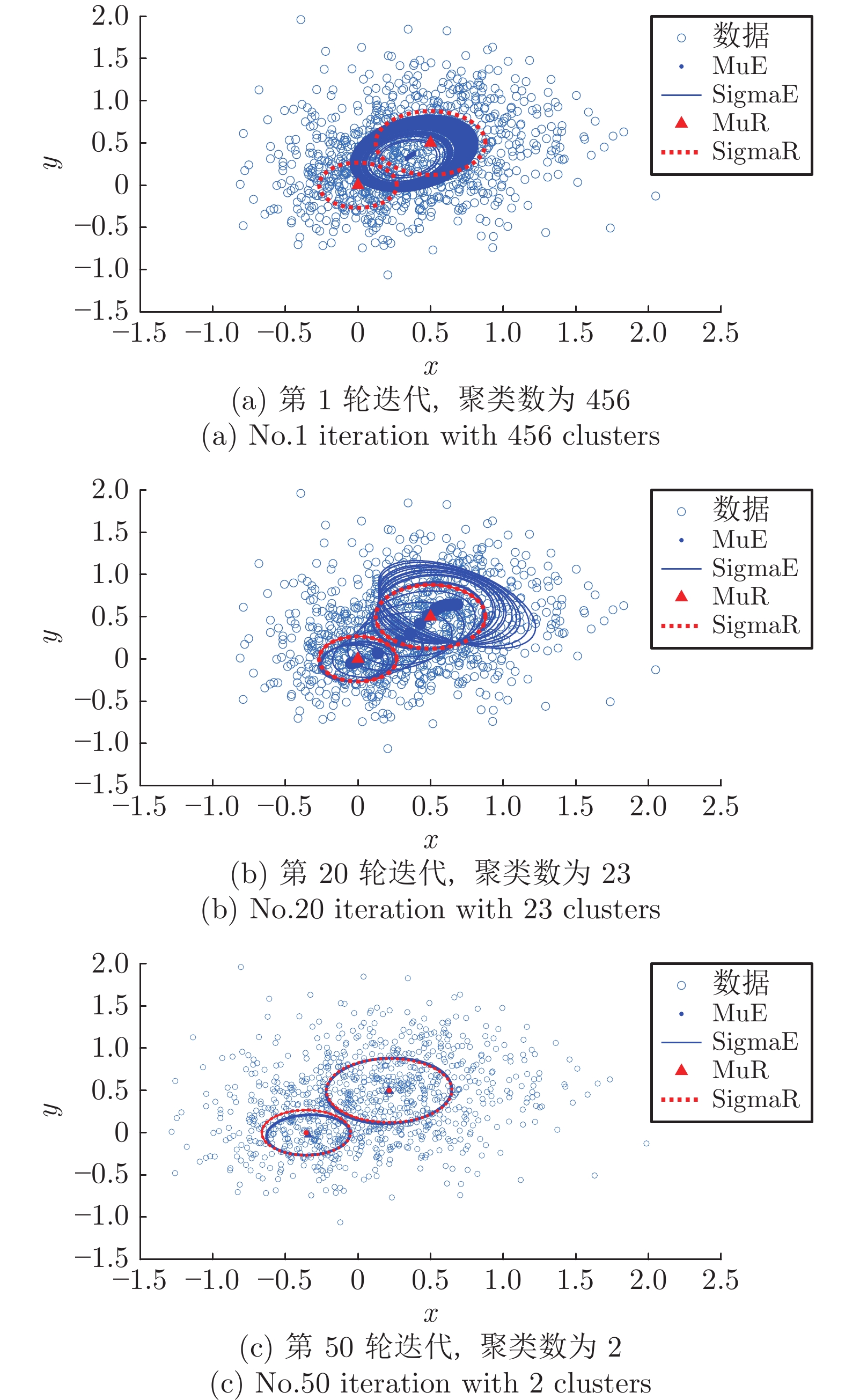
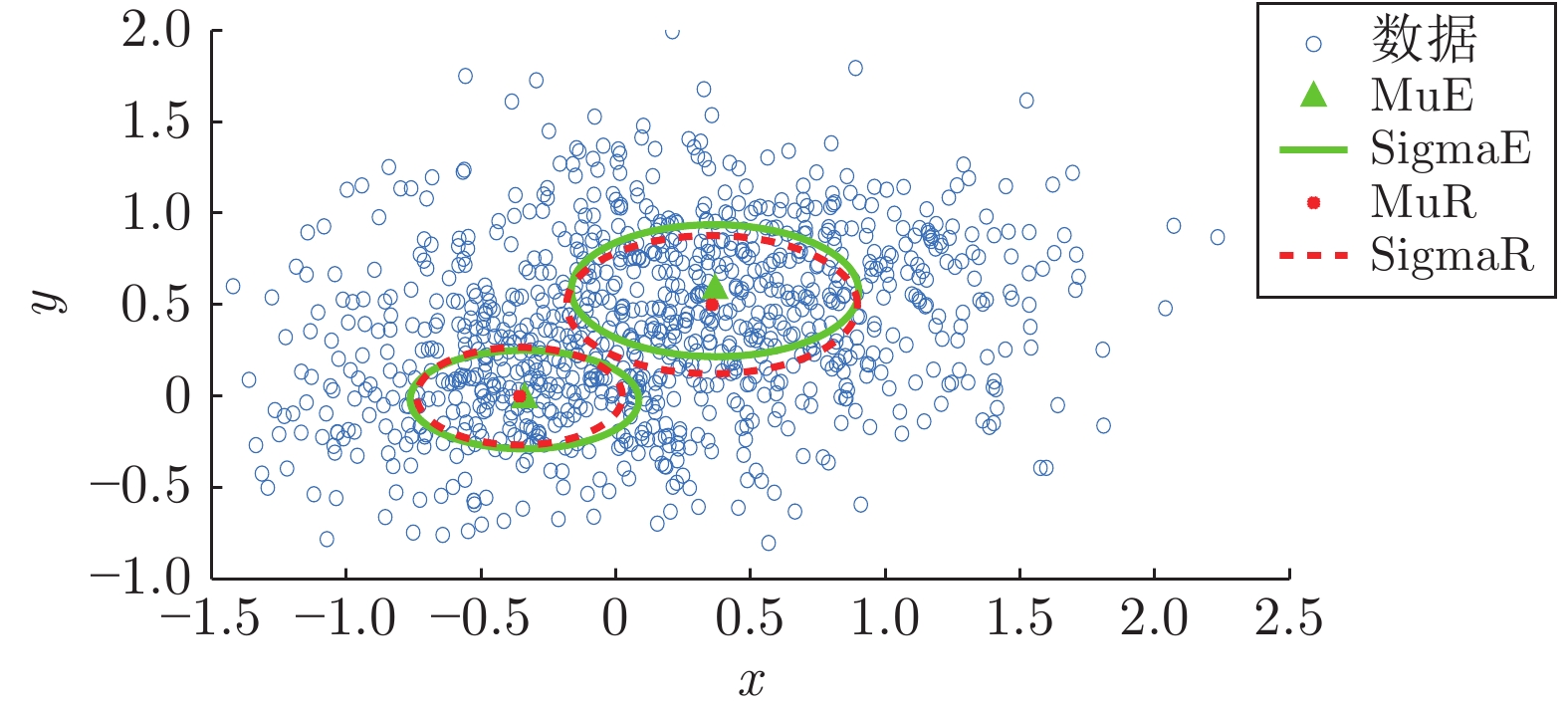
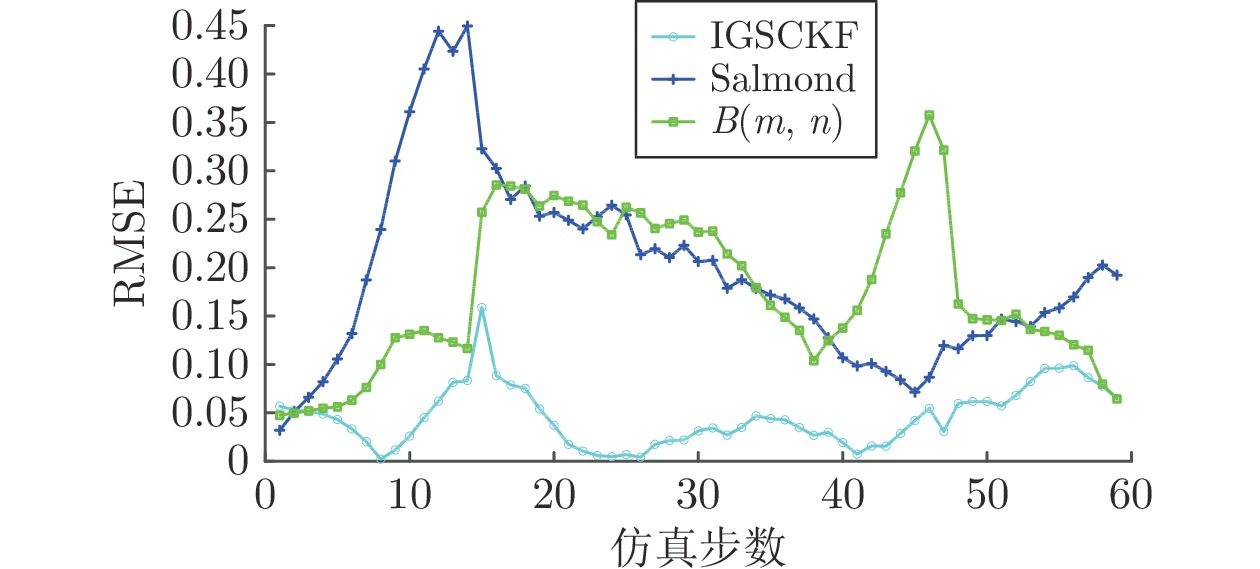
针对复杂环境下机器人运动状态估计的精度改善问题, 提出一种面向非线性非高斯系统的改进高斯和容积卡尔曼滤波估计方法. 首先, 引入加权信息量概念来改进期望最大化算法目标函数惩罚项, 使得在优化过程中能考虑更全面的参数信息, 以达到减少期望最大化算法的迭代次数和提高收敛速度的目的. 此外, 以基于马氏距离和Kullback-Leibler (KL)距离的高斯项合并方法为基础, 提出一种能有效联合两类高斯项合并方式的融合模式. 先单独使用马氏距离和KL距离进行高斯混合项合并, 再对获得的高斯混合项进行加权融合处理, 以改善高斯和滤波中多高斯项的合并性能和保真度. 最后, 应用非线性非高斯系统的高斯和容积卡尔曼滤波框架实现对复杂环境下机器人的运动状态估计. 理论分析与仿真结果表明, 该方法能实现对机器人运动更好的状态估计精度, 并具有更强的鲁棒性能.
针对复杂环境下机器人运动状态估计的精度改善问题, 提出一种面向非线性非高斯系统的改进高斯和容积卡尔曼滤波估计方法. 首先, 引入加权信息量概念来改进期望最大化算法目标函数惩罚项, 使得在优化过程中能考虑更全面的参数信息, 以达到减少期望最大化算法的迭代次数和提高收敛速度的目的. 此外, 以基于马氏距离和Kullback-Leibler (KL)距离的高斯项合并方法为基础, 提出一种能有效联合两类高斯项合并方式的融合模式. 先单独使用马氏距离和KL距离进行高斯混合项合并, 再对获得的高斯混合项进行加权融合处理, 以改善高斯和滤波中多高斯项的合并性能和保真度. 最后, 应用非线性非高斯系统的高斯和容积卡尔曼滤波框架实现对复杂环境下机器人的运动状态估计. 理论分析与仿真结果表明, 该方法能实现对机器人运动更好的状态估计精度, 并具有更强的鲁棒性能.




2022, 48(8): 1984-1993.
doi: 10.16383/j.aas.c190408
摘要:
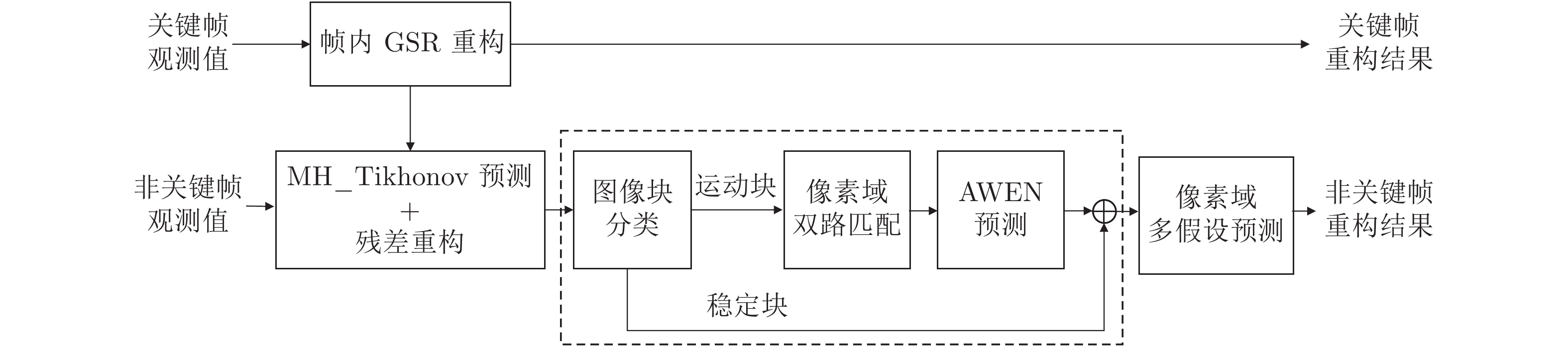
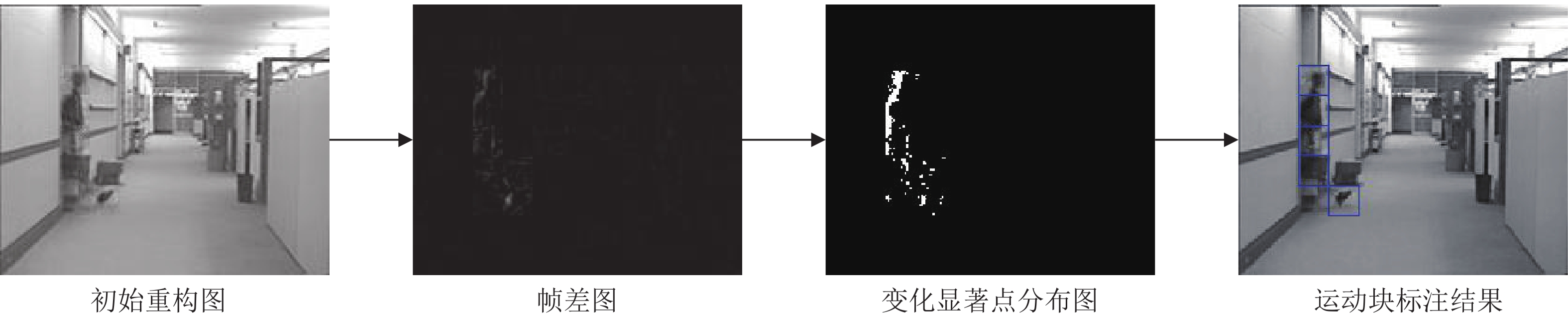
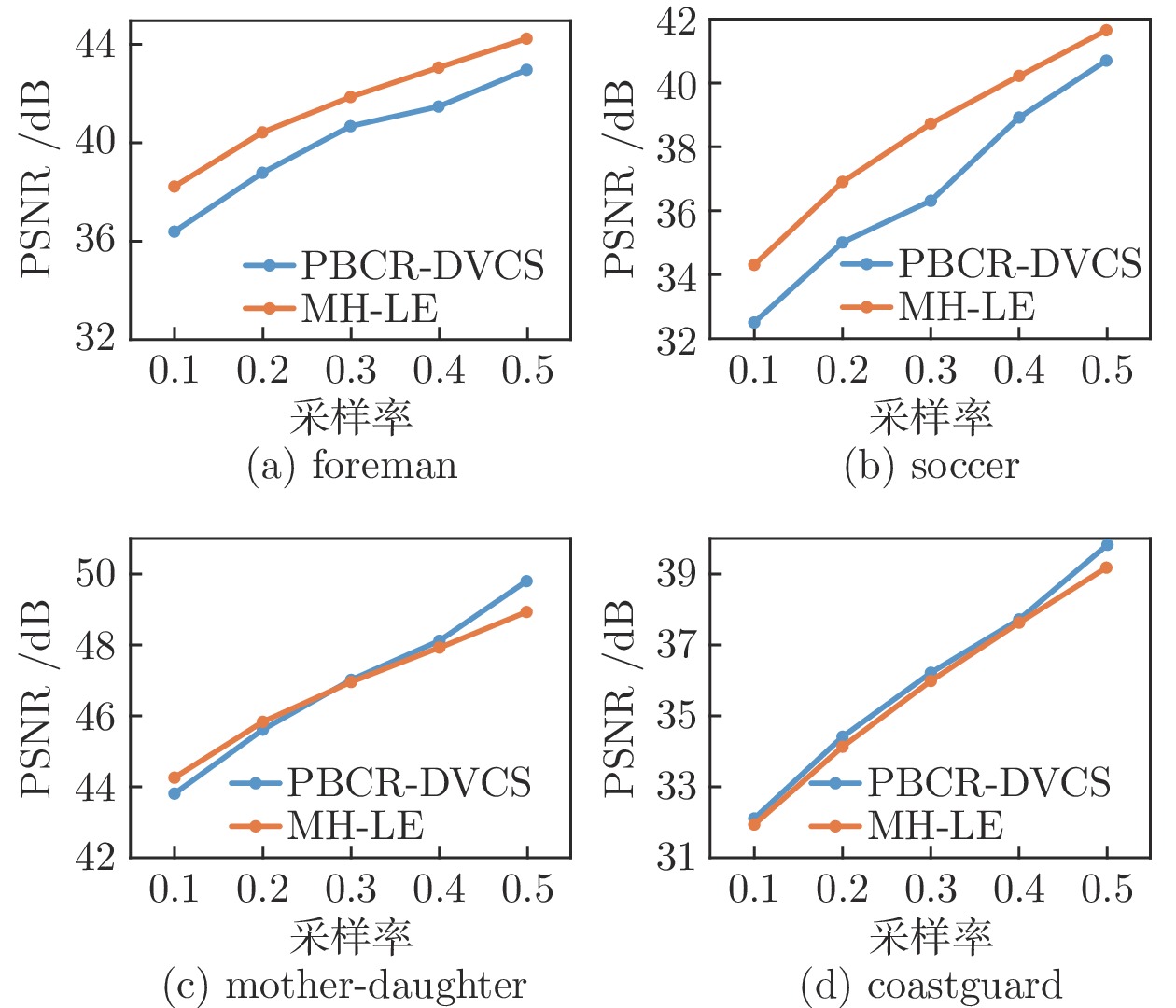
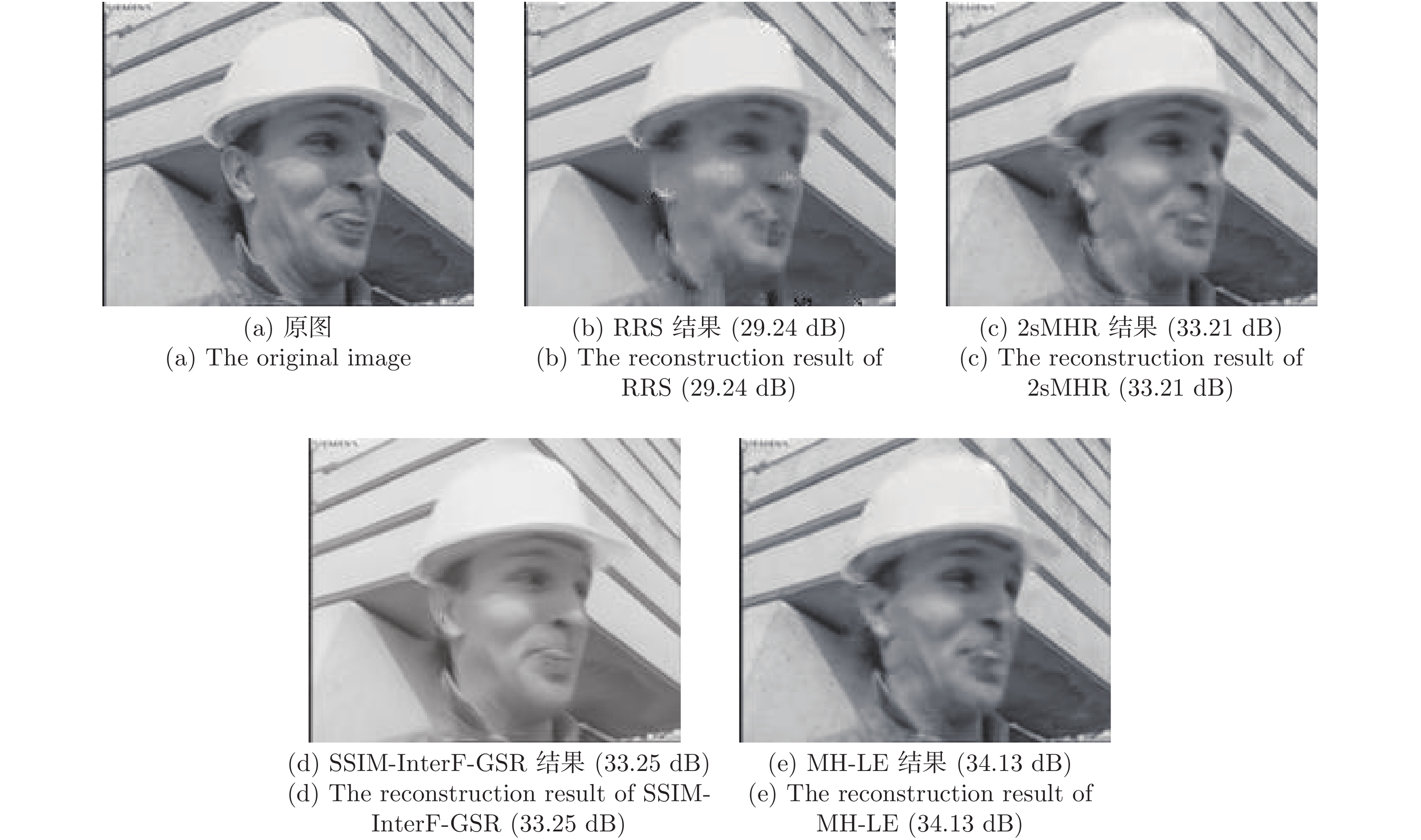
在基于多假设预测的视频压缩感知重构中, 不同图像块对应的假设集匹配程度差异较大, 因此重构难度差异明显. 本文提出多假设局部增强重构算法(Local enhancement reconstruction algorithm based on multi-hypothesis prediction, MH-LE), 利用帧间相关性对图像块进行分类后针对运动图像块提出像素域双路匹配策略, 通过强化图像块基本特征来提高相似块匹配效果, 获取更高质量的假设集; 同时将结构相似度评价标准引入假设块权值分配过程, 提高预测精度. 仿真结果表明, 所提算法的重构质量明显优于其他多假设预测重构算法. 和基于组稀疏的重构算法相比, 所提算法具有更快的重构速度, 在大部分的采样率条件下具有更高的重构质量.
在基于多假设预测的视频压缩感知重构中, 不同图像块对应的假设集匹配程度差异较大, 因此重构难度差异明显. 本文提出多假设局部增强重构算法(Local enhancement reconstruction algorithm based on multi-hypothesis prediction, MH-LE), 利用帧间相关性对图像块进行分类后针对运动图像块提出像素域双路匹配策略, 通过强化图像块基本特征来提高相似块匹配效果, 获取更高质量的假设集; 同时将结构相似度评价标准引入假设块权值分配过程, 提高预测精度. 仿真结果表明, 所提算法的重构质量明显优于其他多假设预测重构算法. 和基于组稀疏的重构算法相比, 所提算法具有更快的重构速度, 在大部分的采样率条件下具有更高的重构质量.

2022, 48(8): 1994-2006.
doi: 10.16383/j.aas.c200284
摘要:
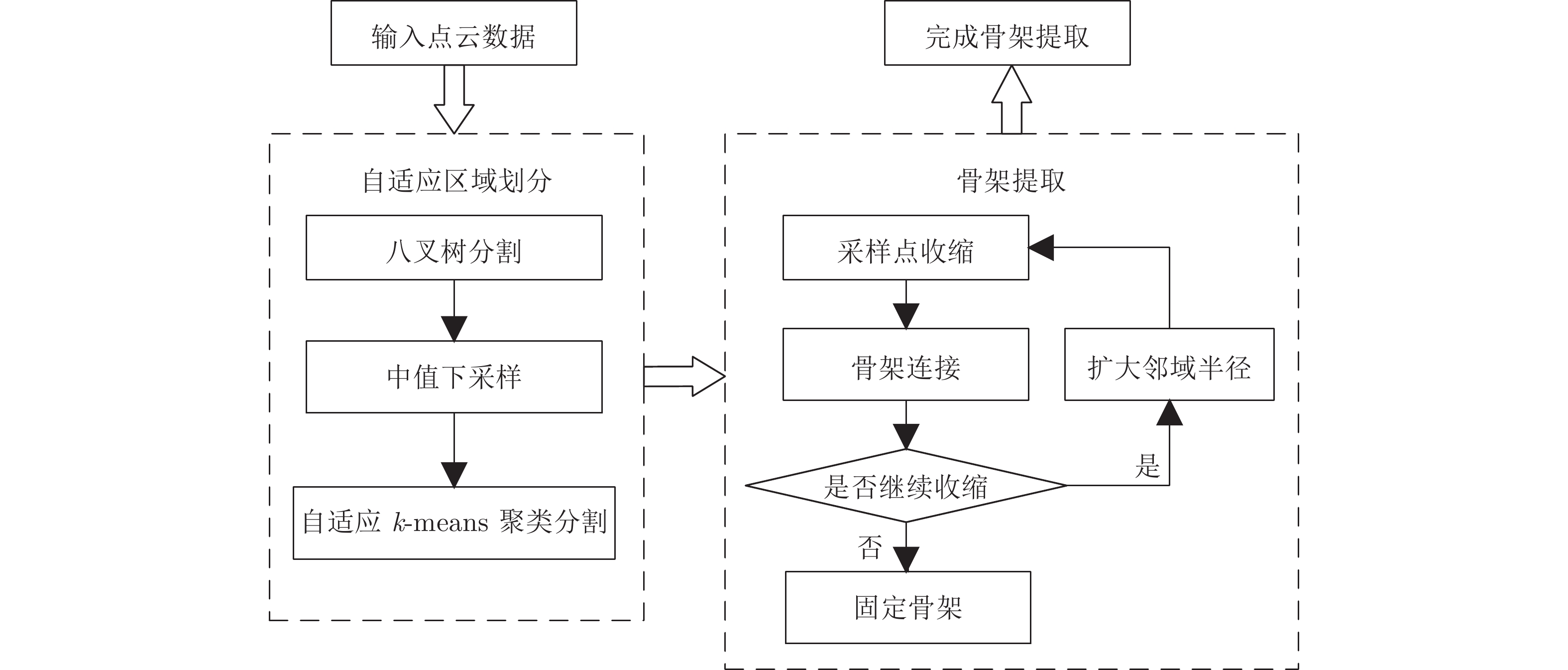
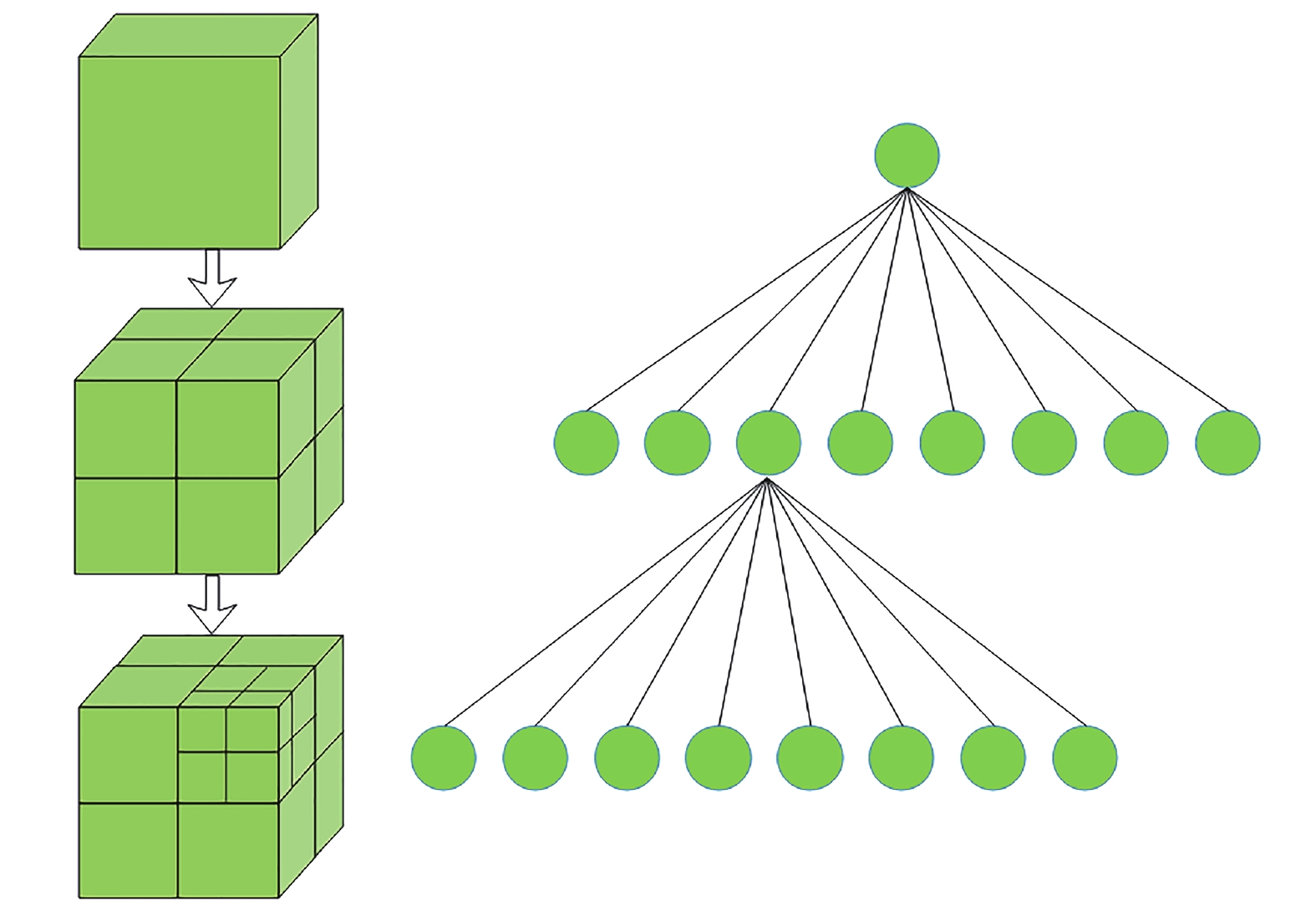
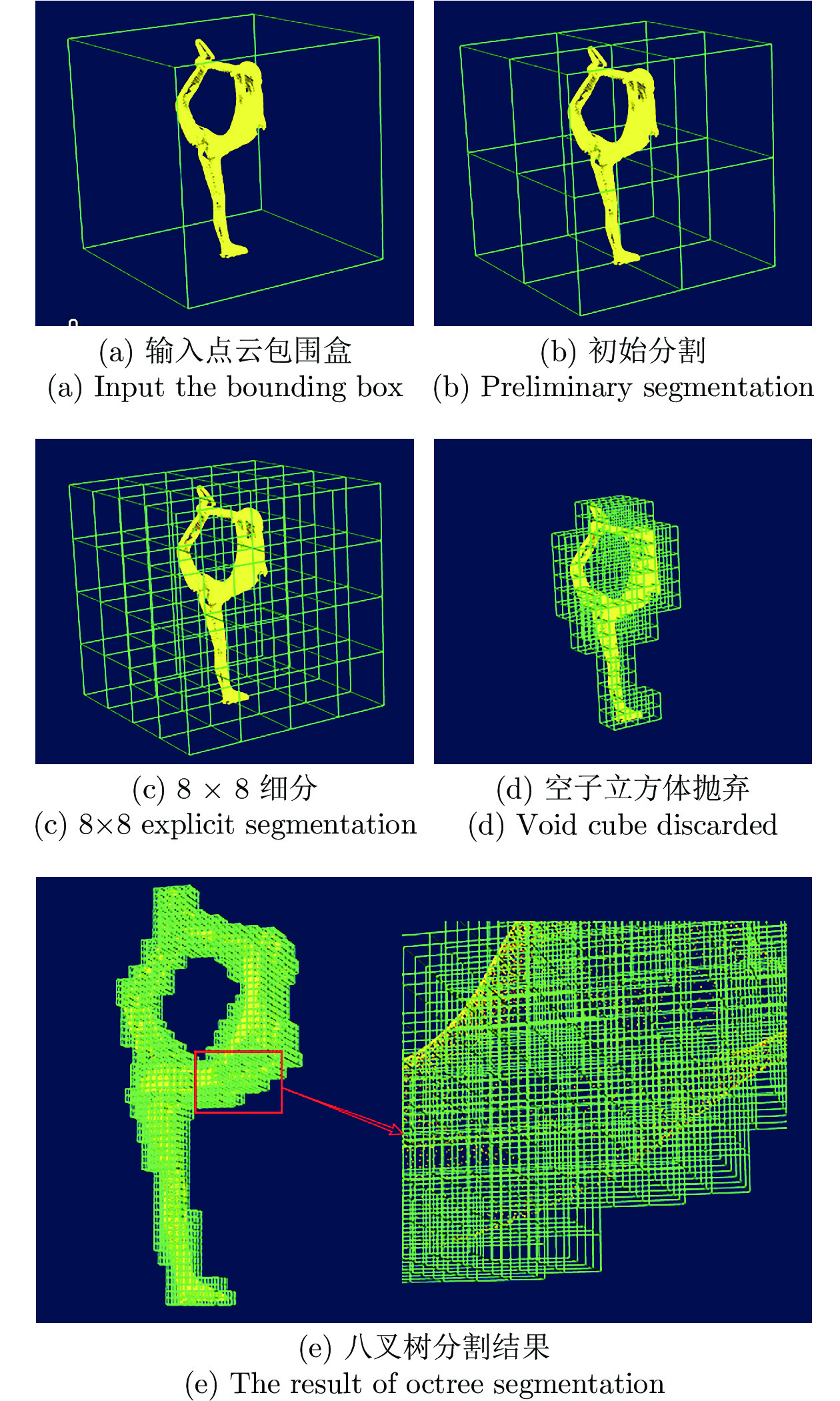
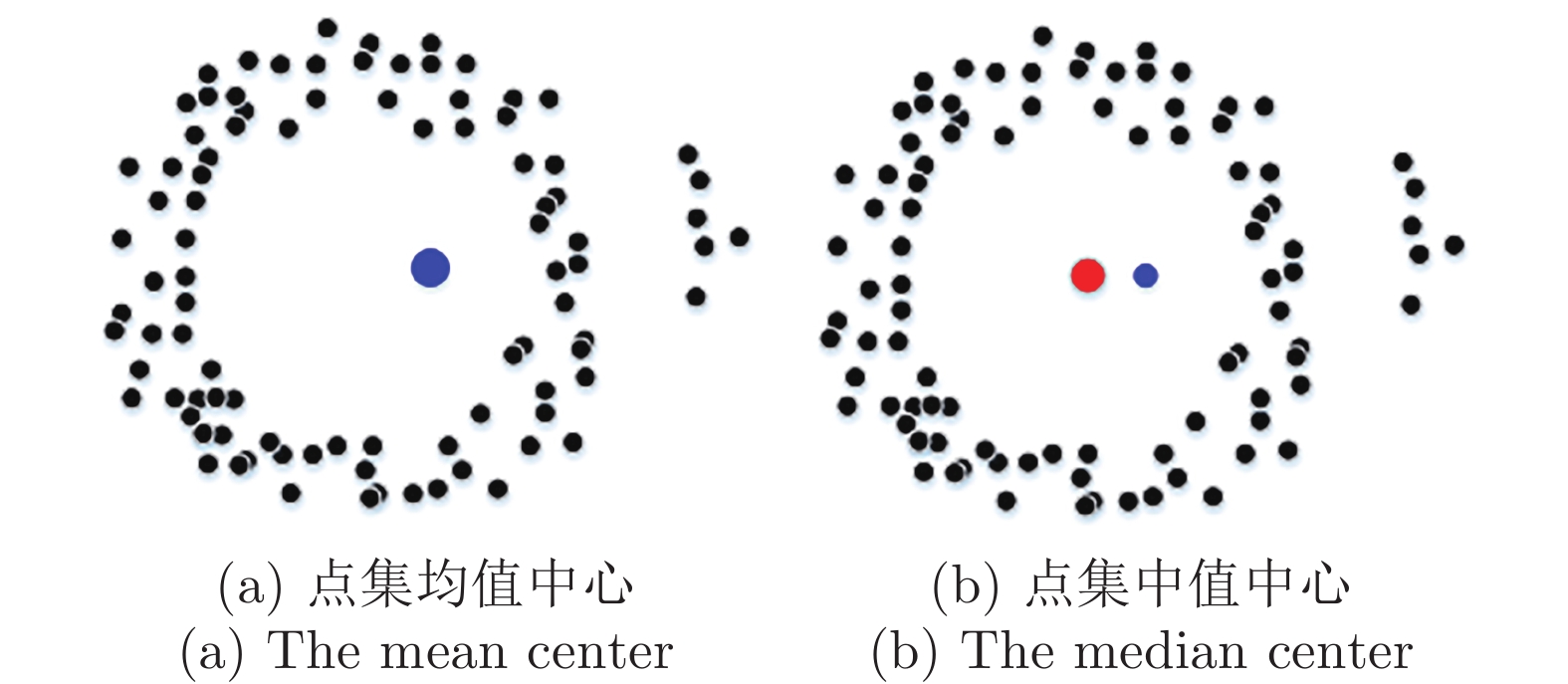
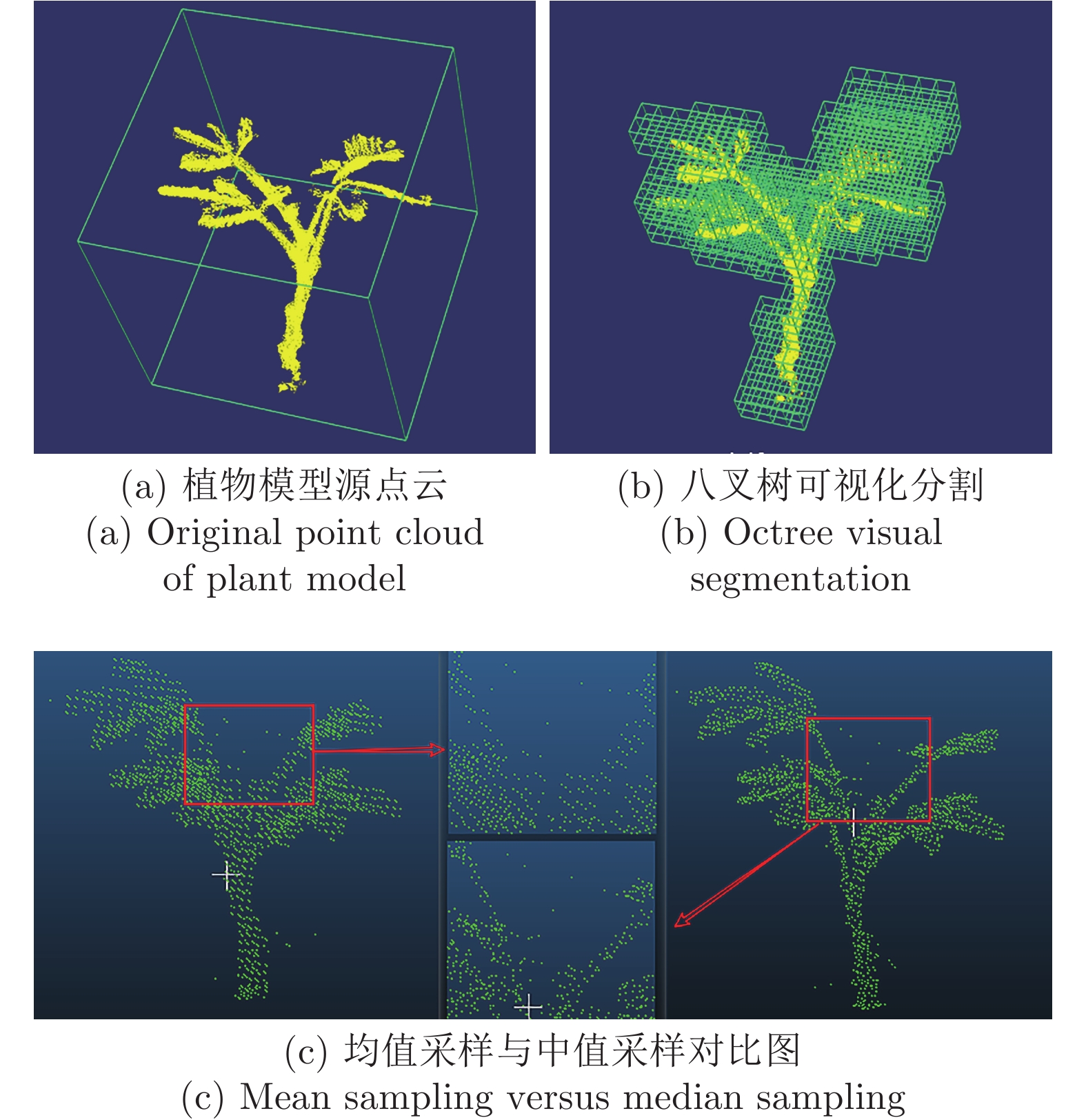
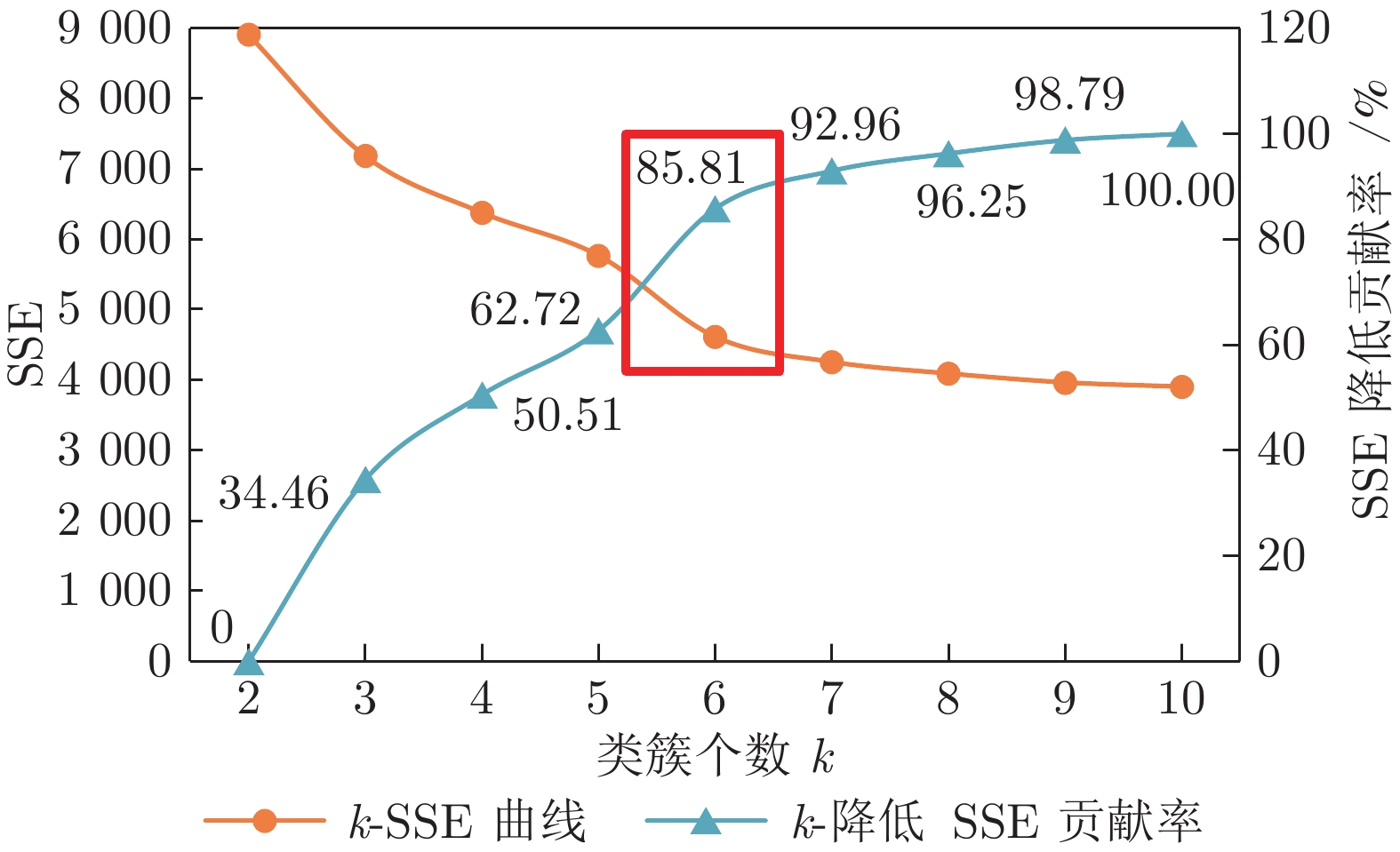
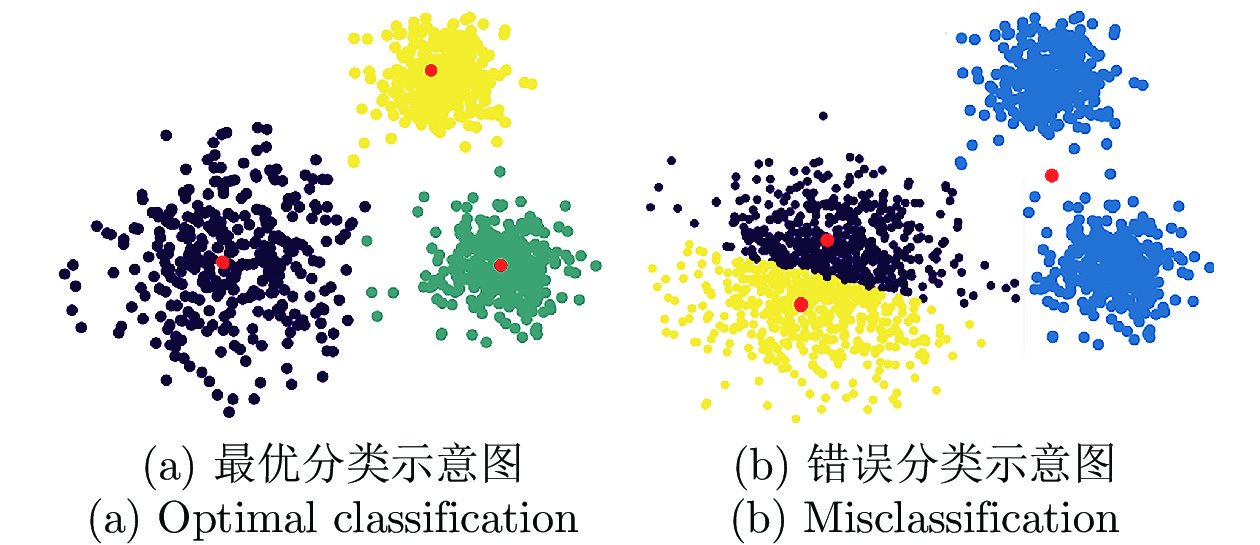
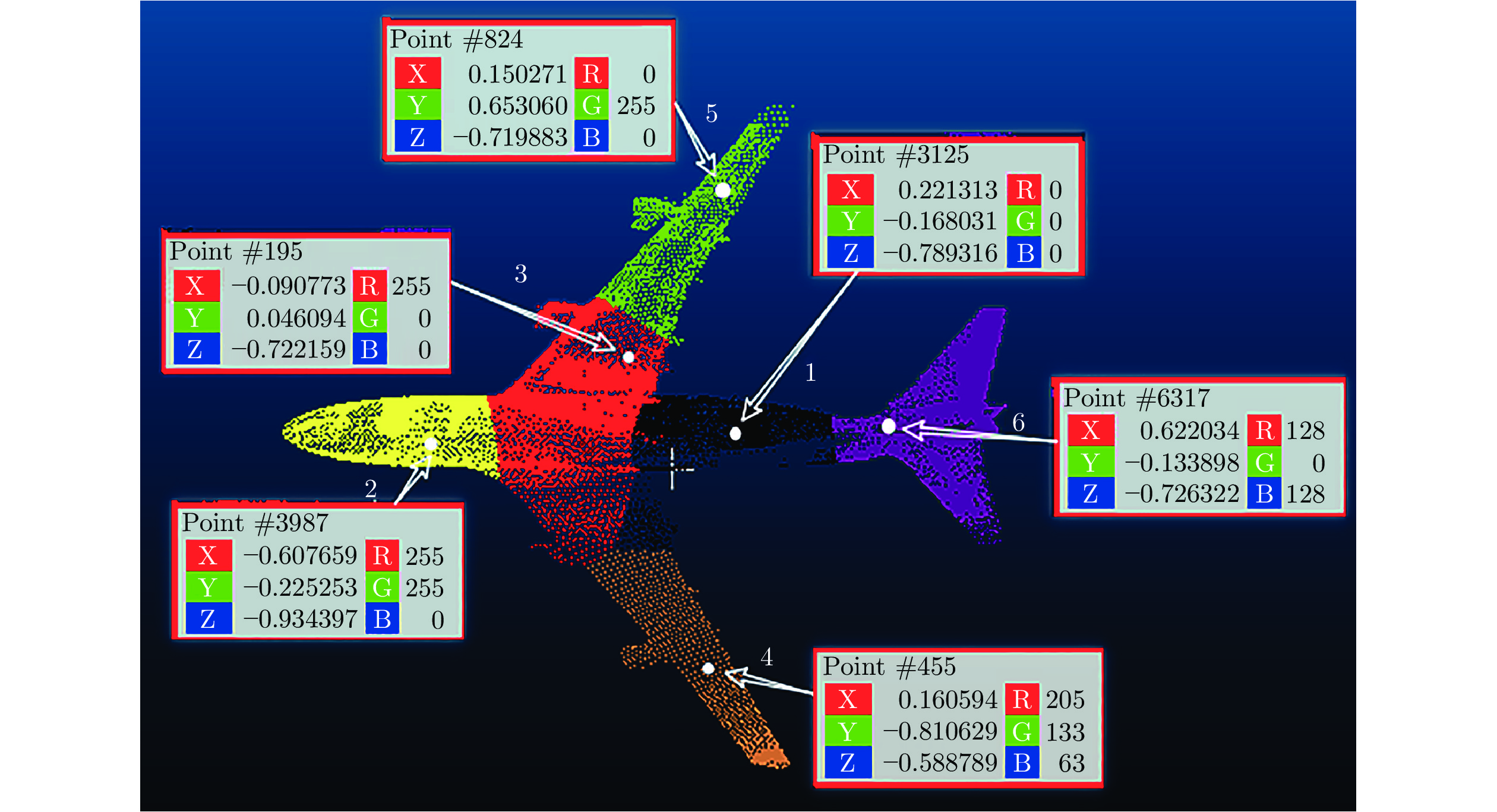
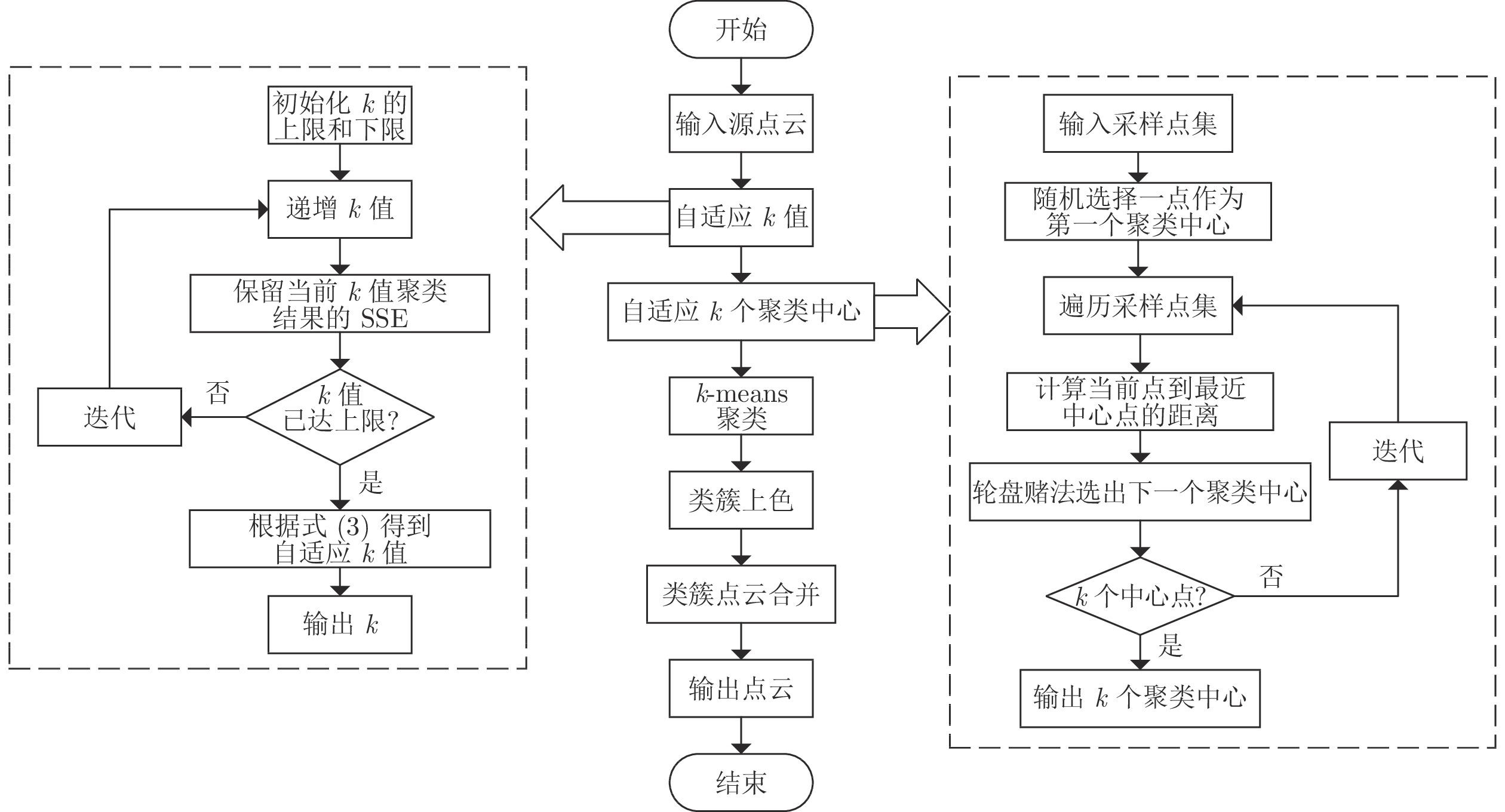
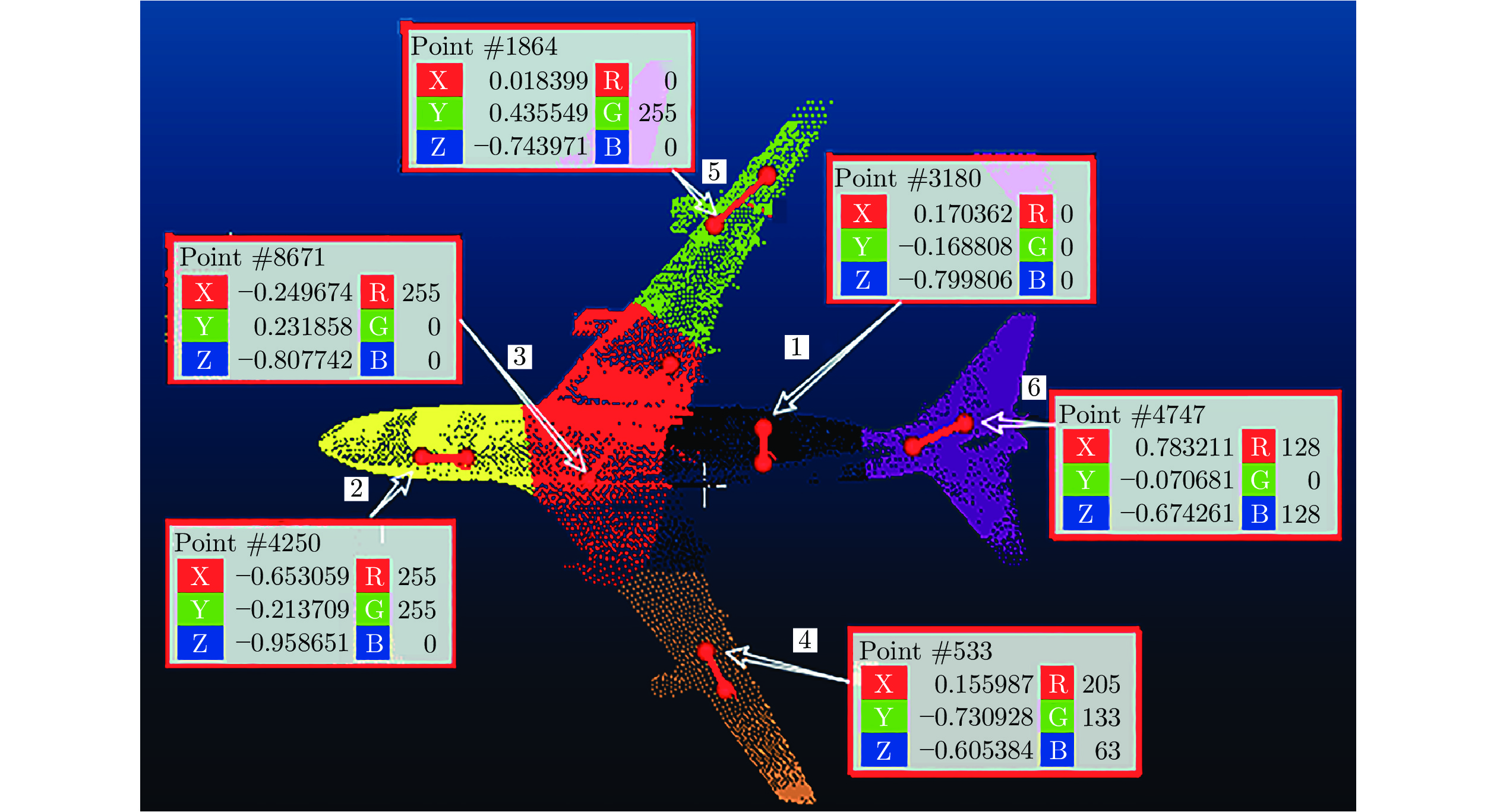
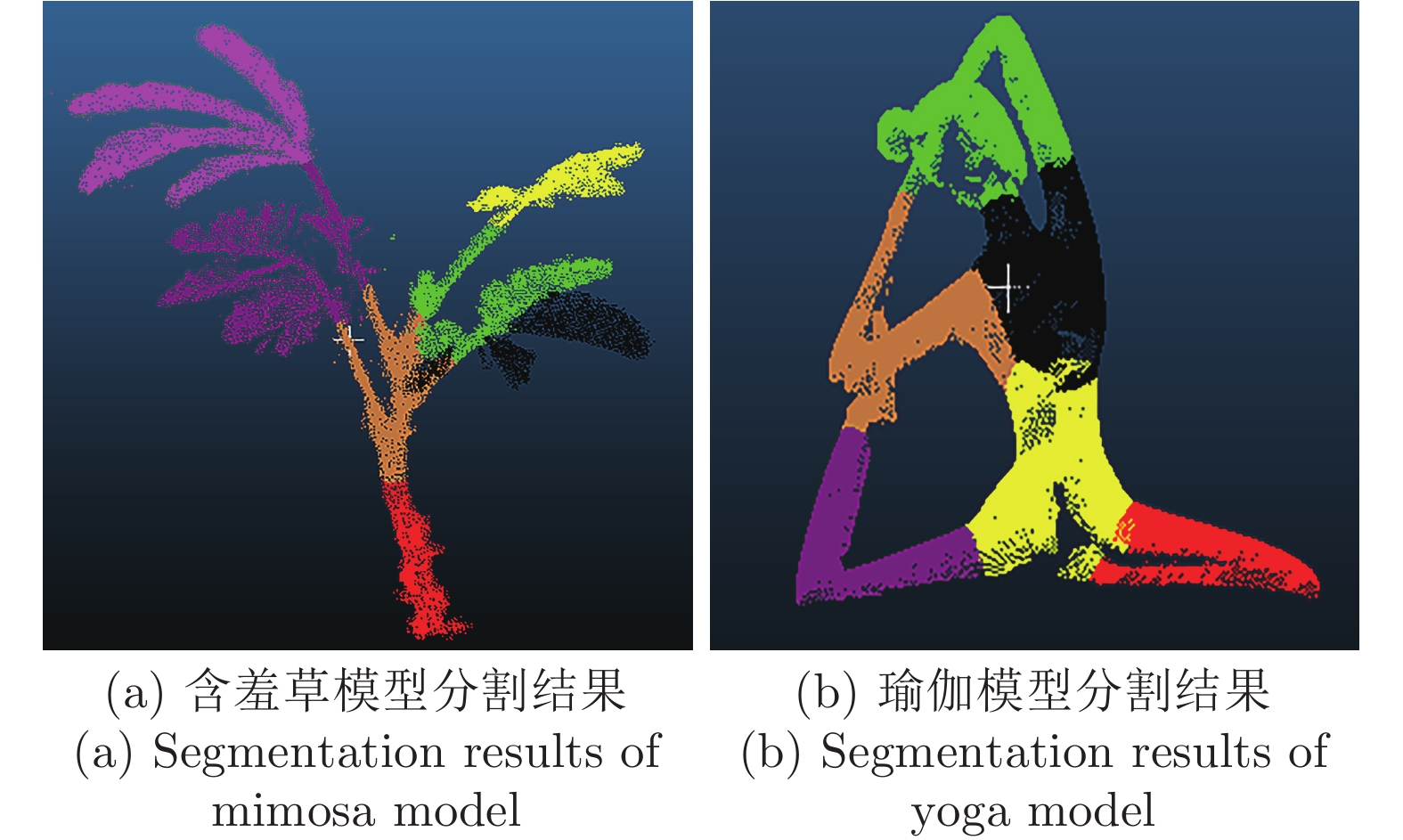
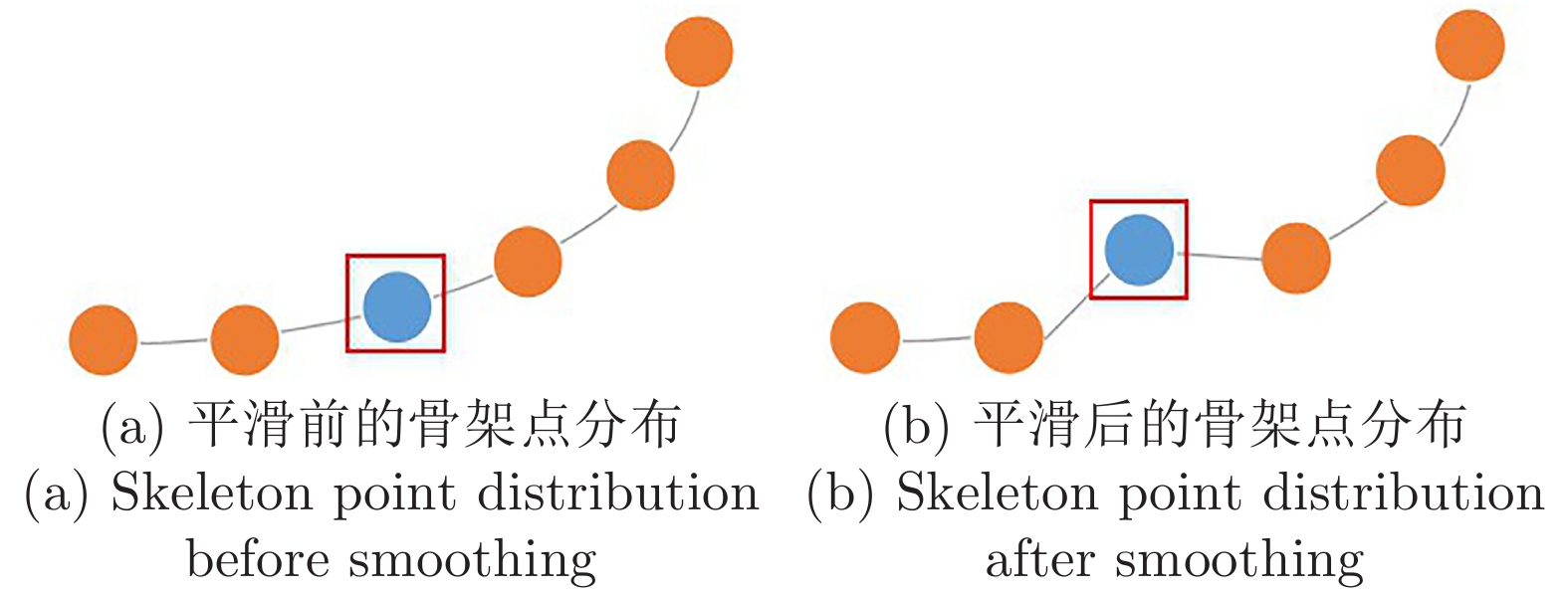
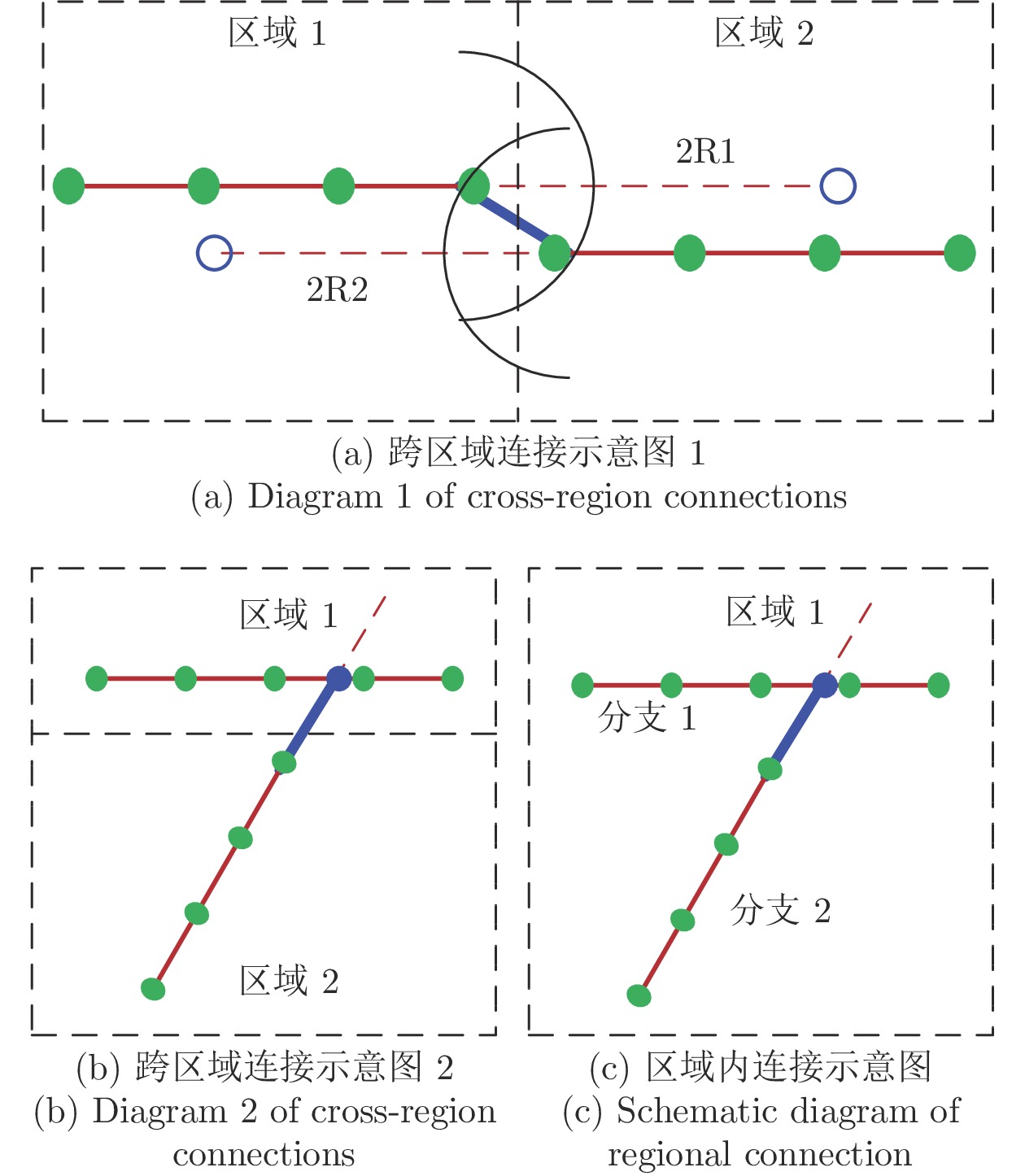
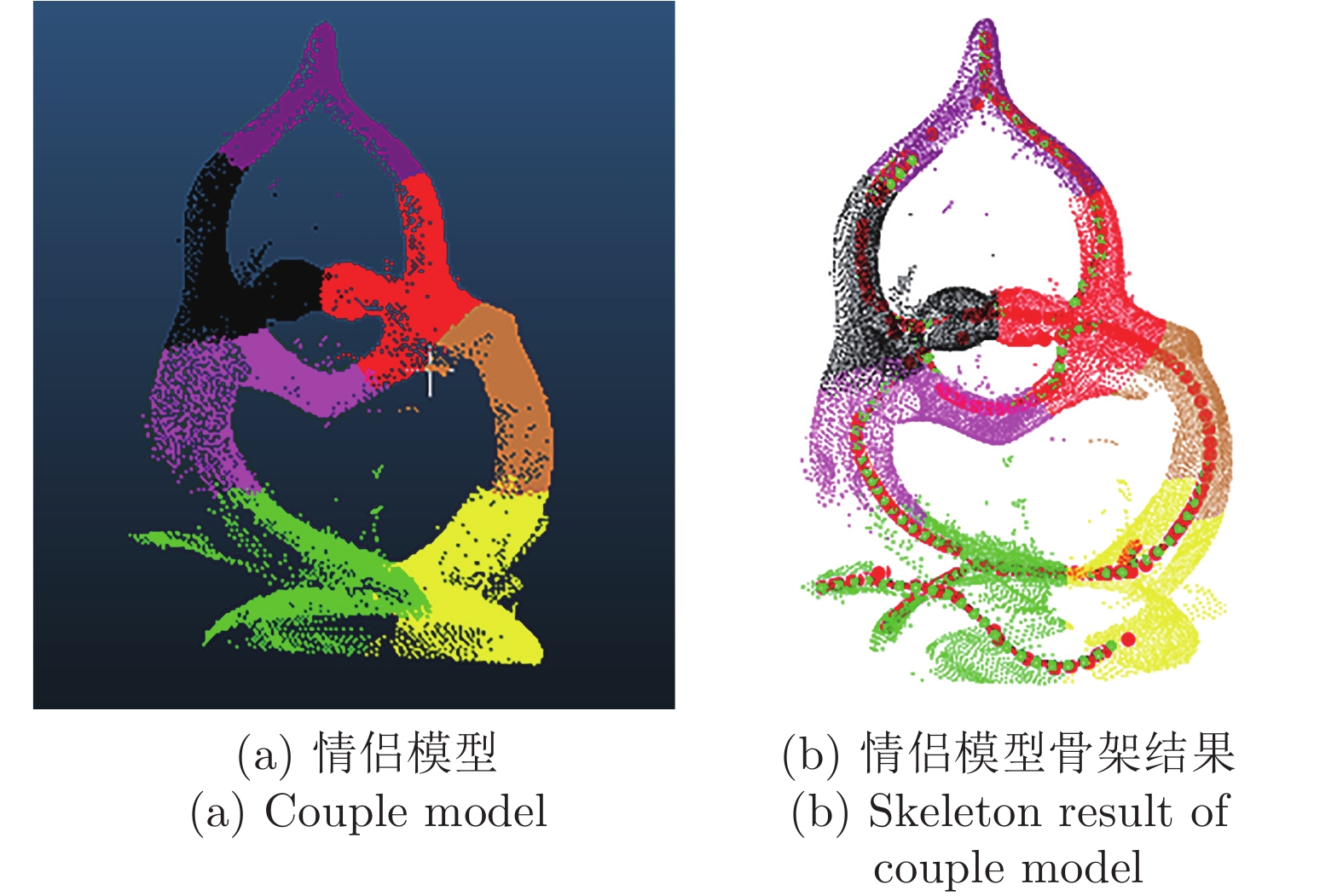
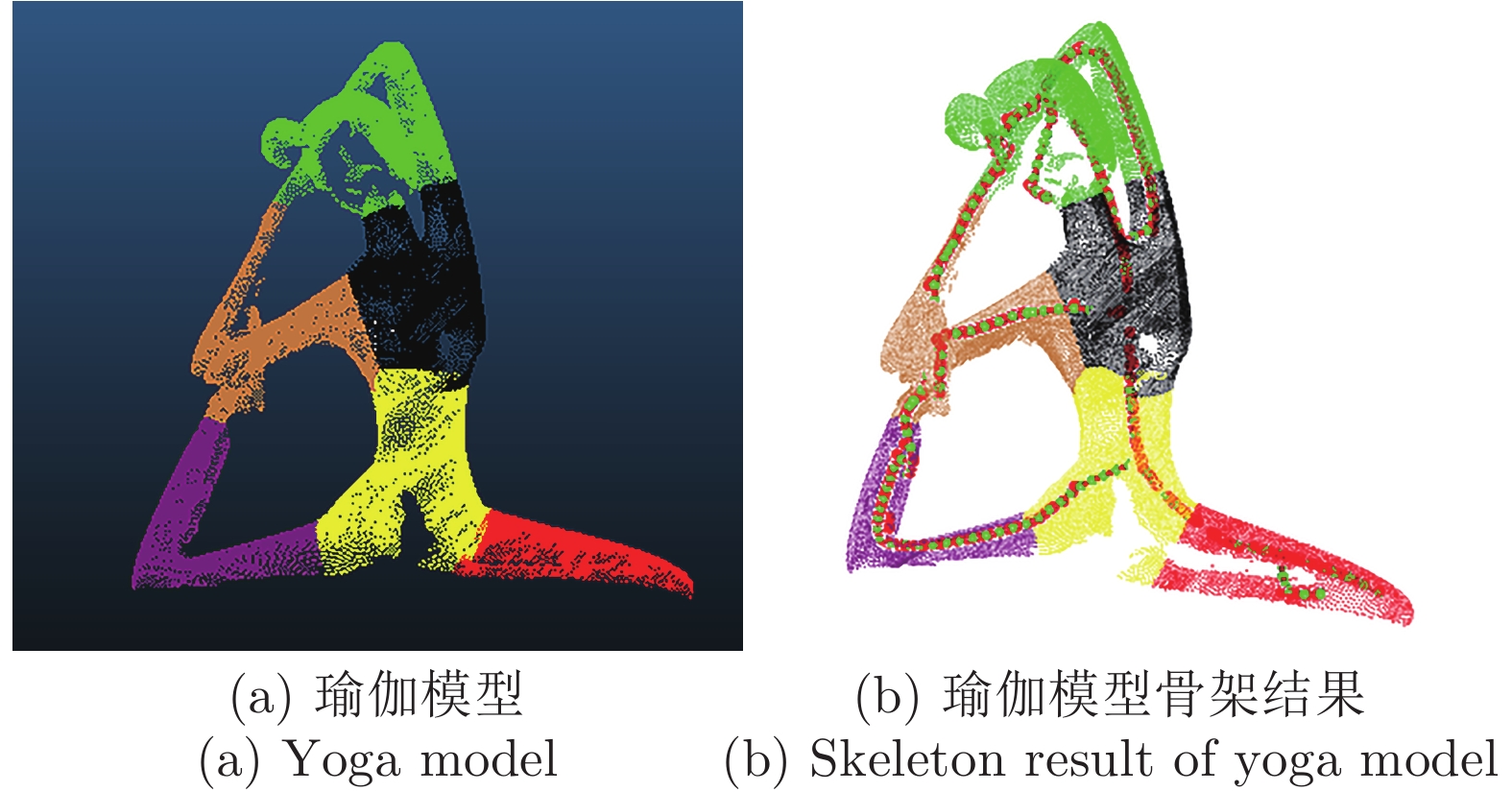
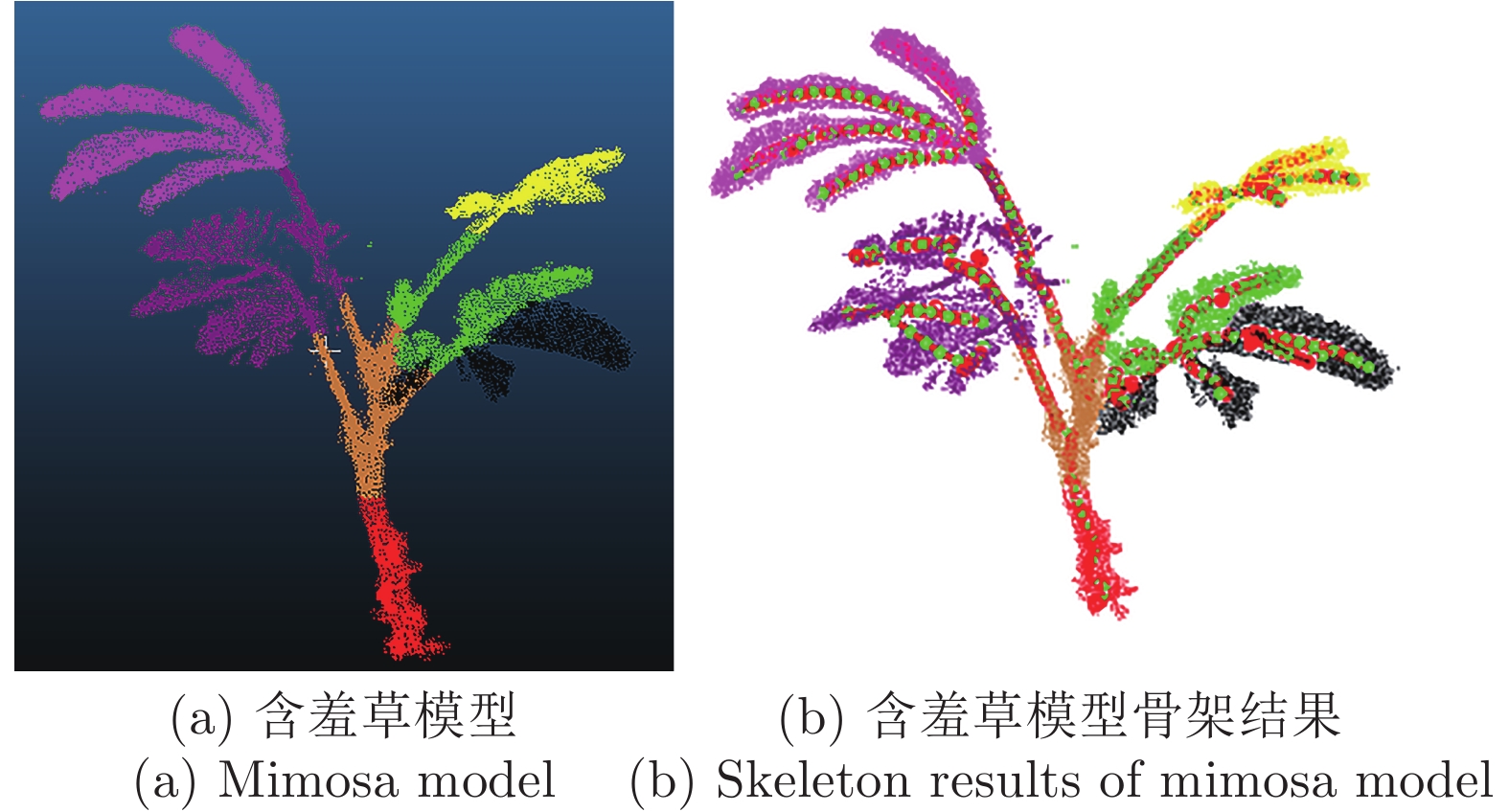
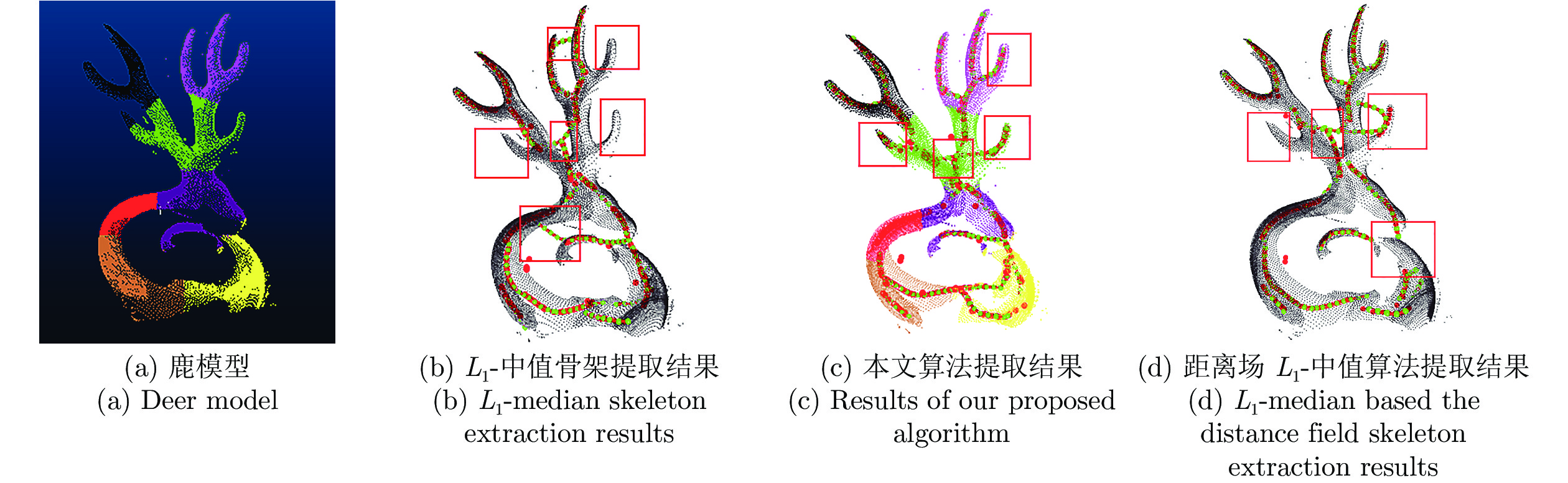
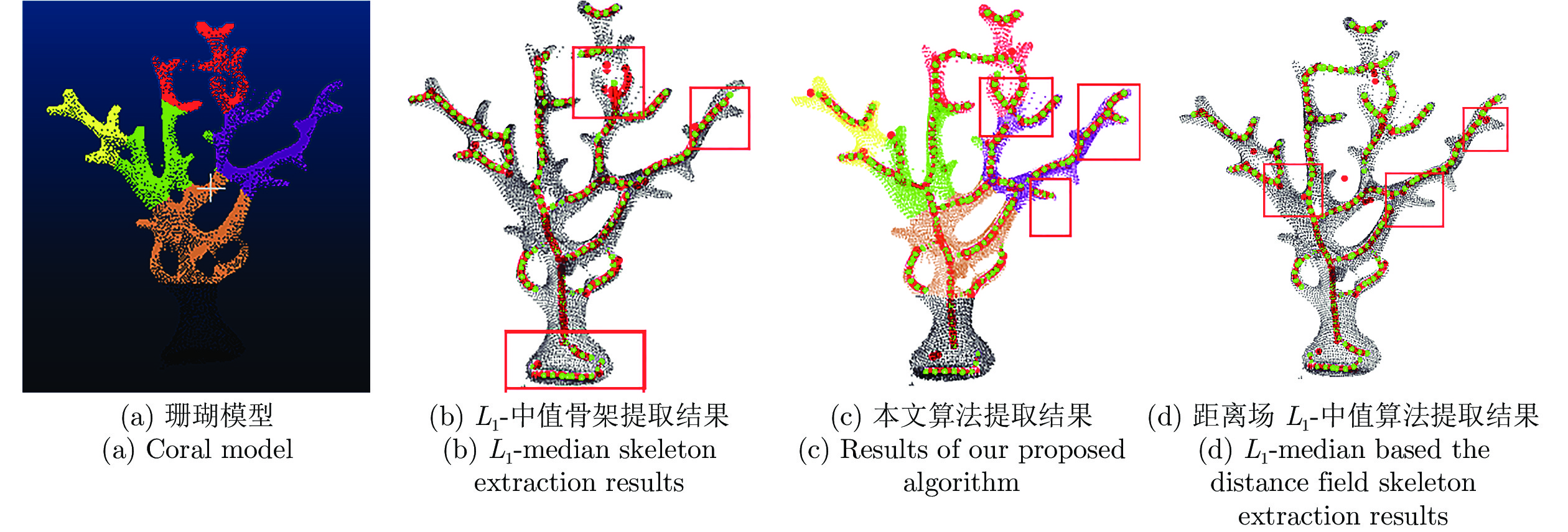
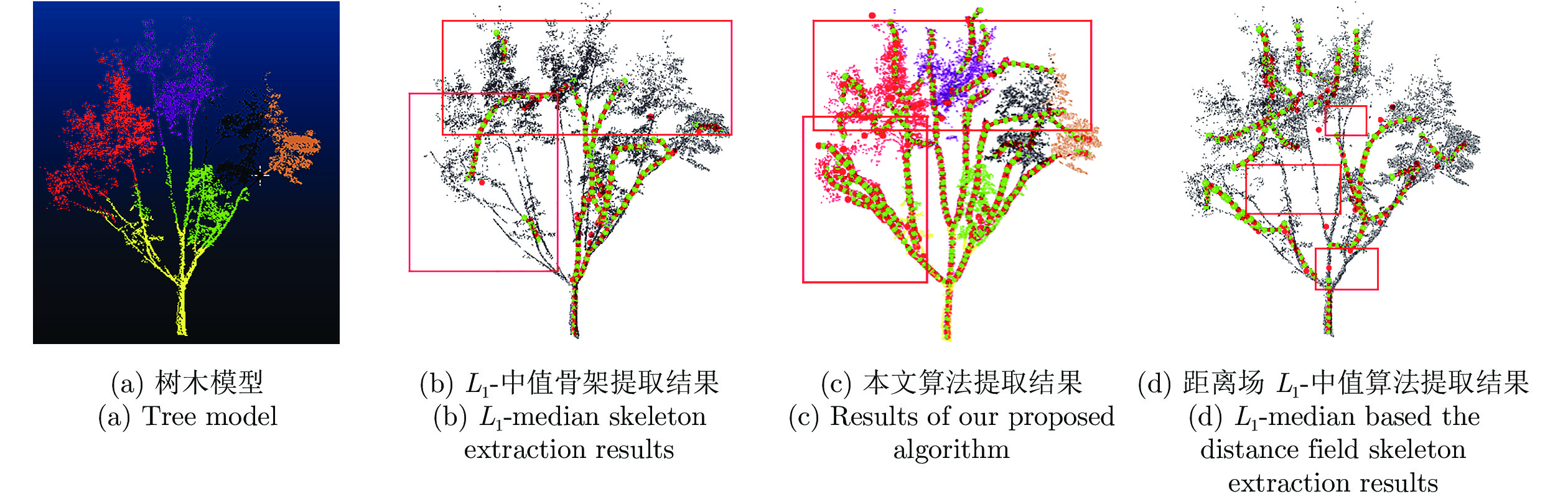
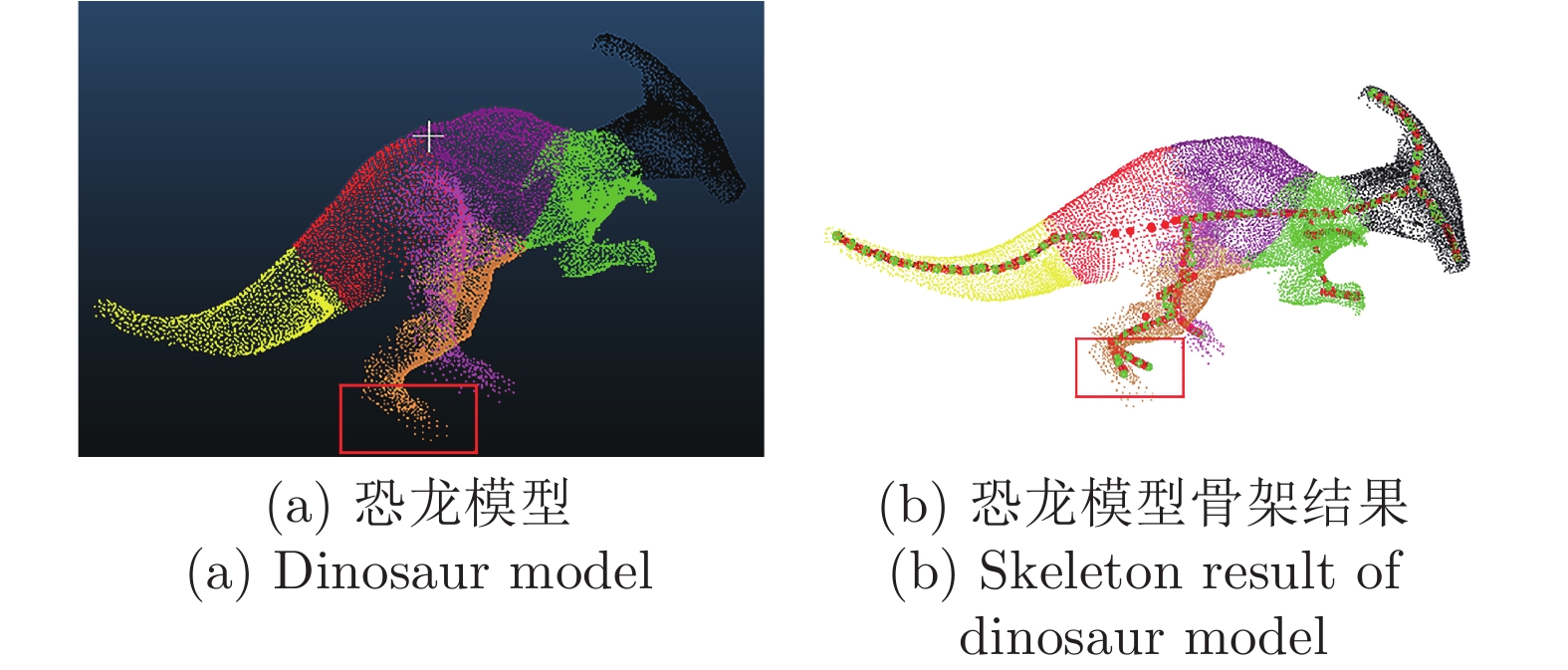
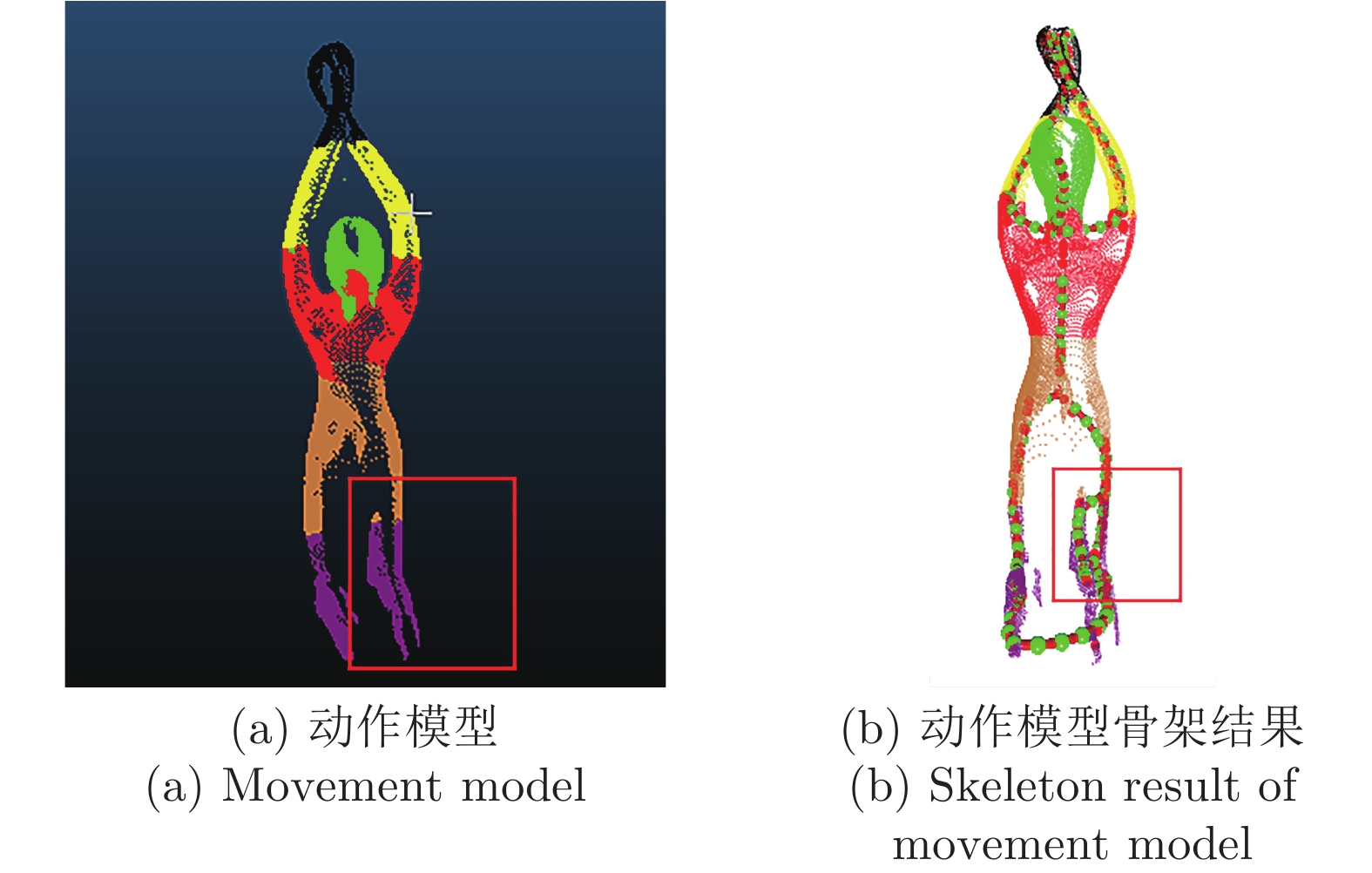
针对三维点云中心骨架提取问题, 提出一种基于改进的自适应k均值聚类预分割引导的点云骨架提取算法. 首先, 将输入点云体素化, 利用八叉树算法覆盖输入点云并下采样实现点云化简; 其次, 在采样点中自适应选取初始聚类中心对点云进行区域划分, 并颜色标记; 最后, 在区域分割的引导下应用L1-中值骨架提取算法实现点云骨架的提取. 该算法主要针对L1-中值算法可重复性差、易丢失细节等缺点进行了改进, 并且对输入点云的质量以及形状的几何或拓扑信息, 都没有严格的先验要求, 可以直接应用到未经任何预处理、含有噪声或离群点的初始扫描点云上. 展示了从多种不规则点云提取的骨架结果, 包括矮小植物、人体动作等. 与传统算法相比, 该算法具有高准确率、强鲁棒性、强学习扩展能力等优点.
针对三维点云中心骨架提取问题, 提出一种基于改进的自适应k均值聚类预分割引导的点云骨架提取算法. 首先, 将输入点云体素化, 利用八叉树算法覆盖输入点云并下采样实现点云化简; 其次, 在采样点中自适应选取初始聚类中心对点云进行区域划分, 并颜色标记; 最后, 在区域分割的引导下应用L1-中值骨架提取算法实现点云骨架的提取. 该算法主要针对L1-中值算法可重复性差、易丢失细节等缺点进行了改进, 并且对输入点云的质量以及形状的几何或拓扑信息, 都没有严格的先验要求, 可以直接应用到未经任何预处理、含有噪声或离群点的初始扫描点云上. 展示了从多种不规则点云提取的骨架结果, 包括矮小植物、人体动作等. 与传统算法相比, 该算法具有高准确率、强鲁棒性、强学习扩展能力等优点.
2022, 48(8): 2007-2017.
doi: 10.16383/j.aas.c190580
摘要:
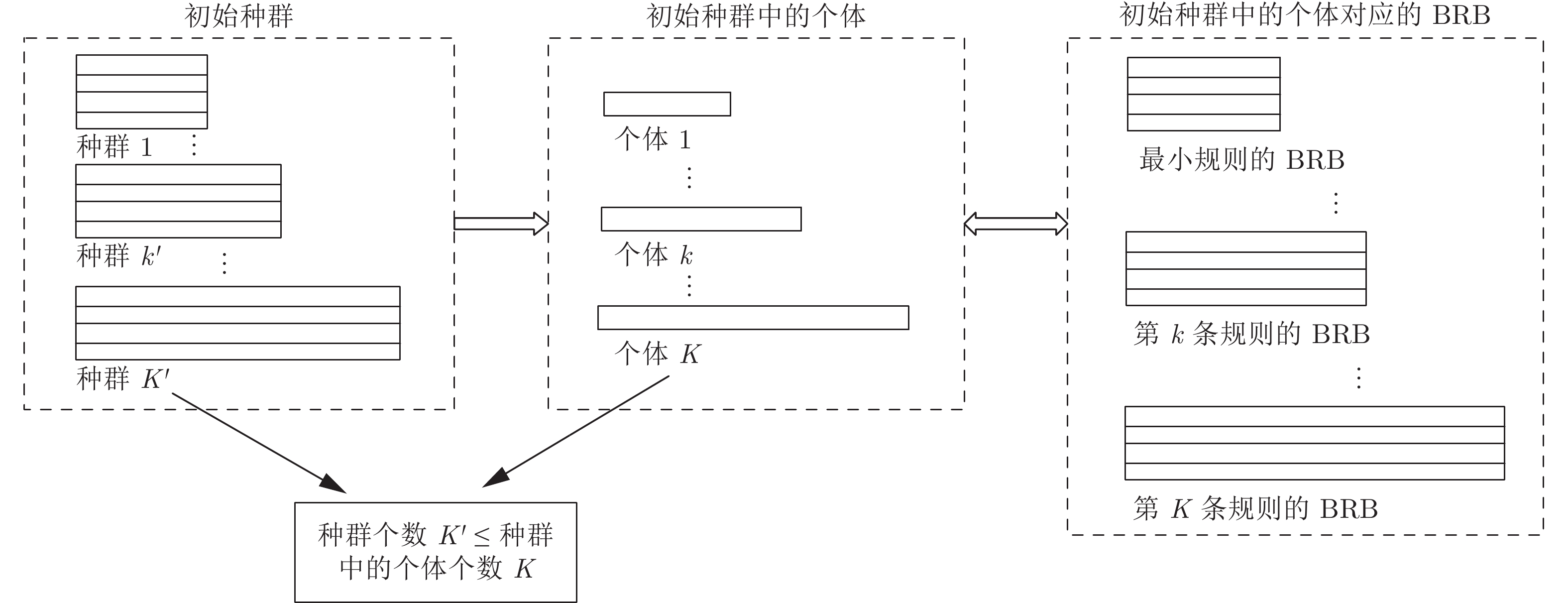
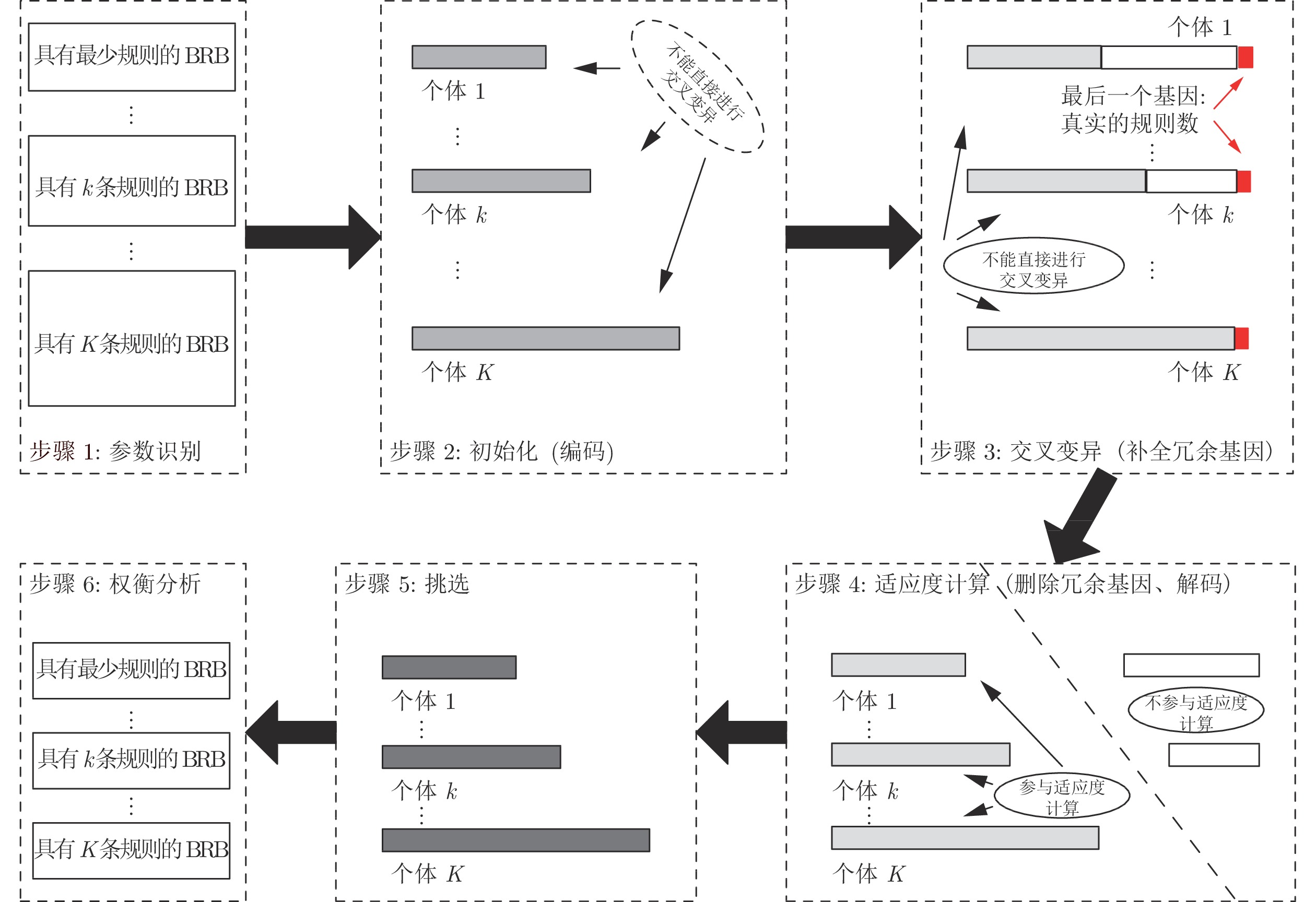
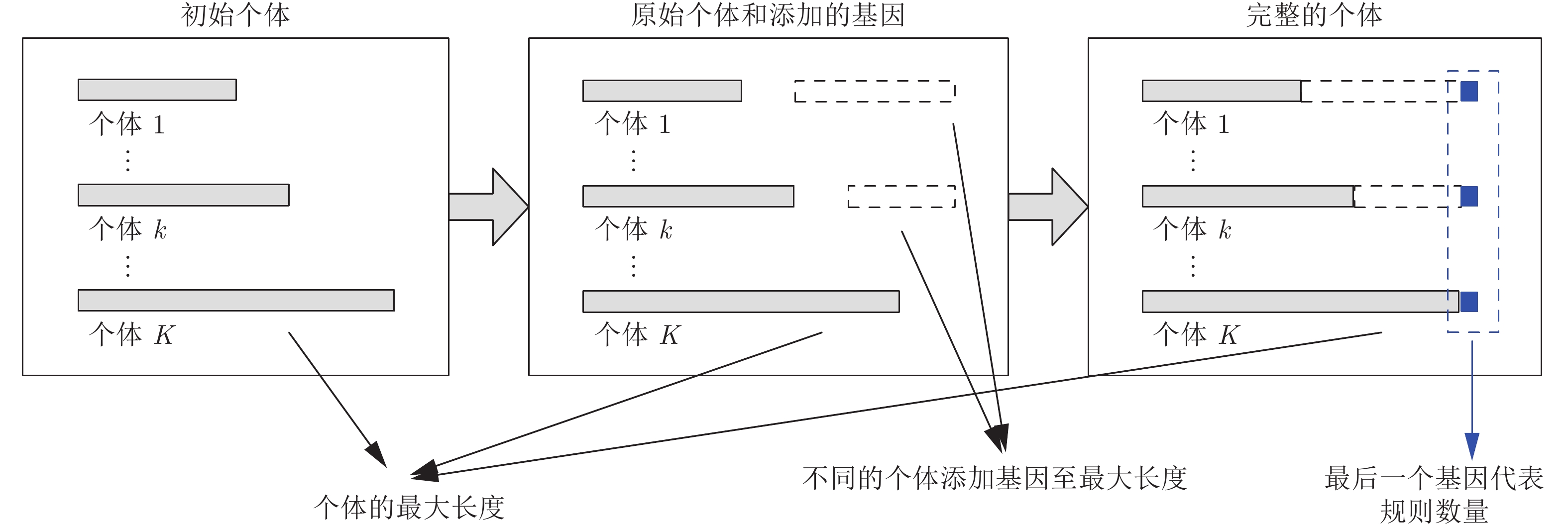
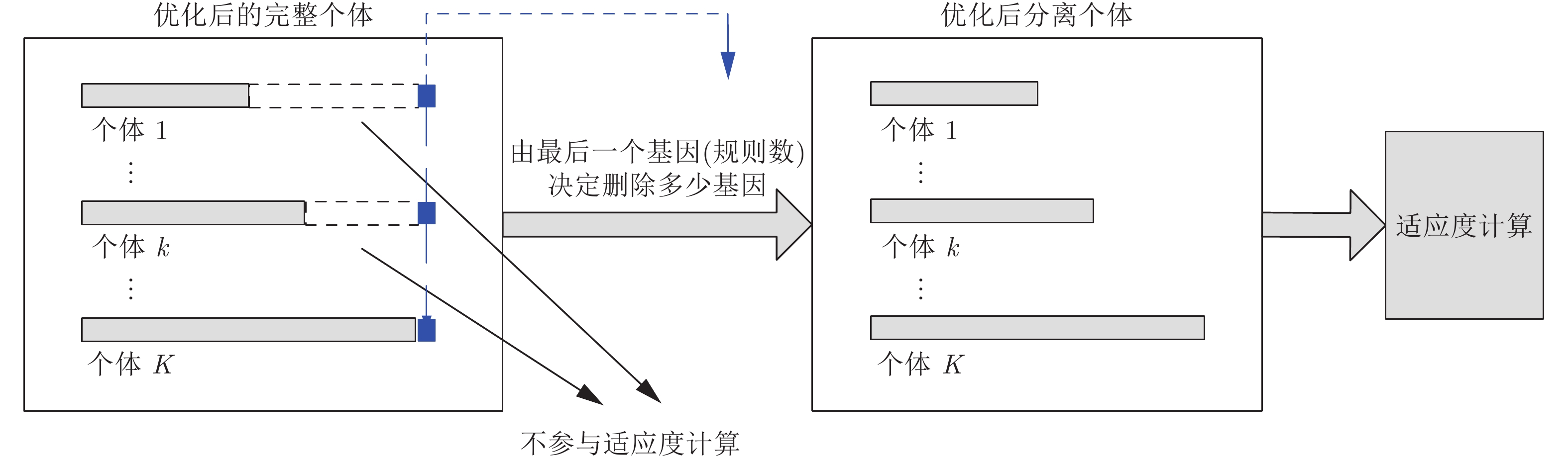
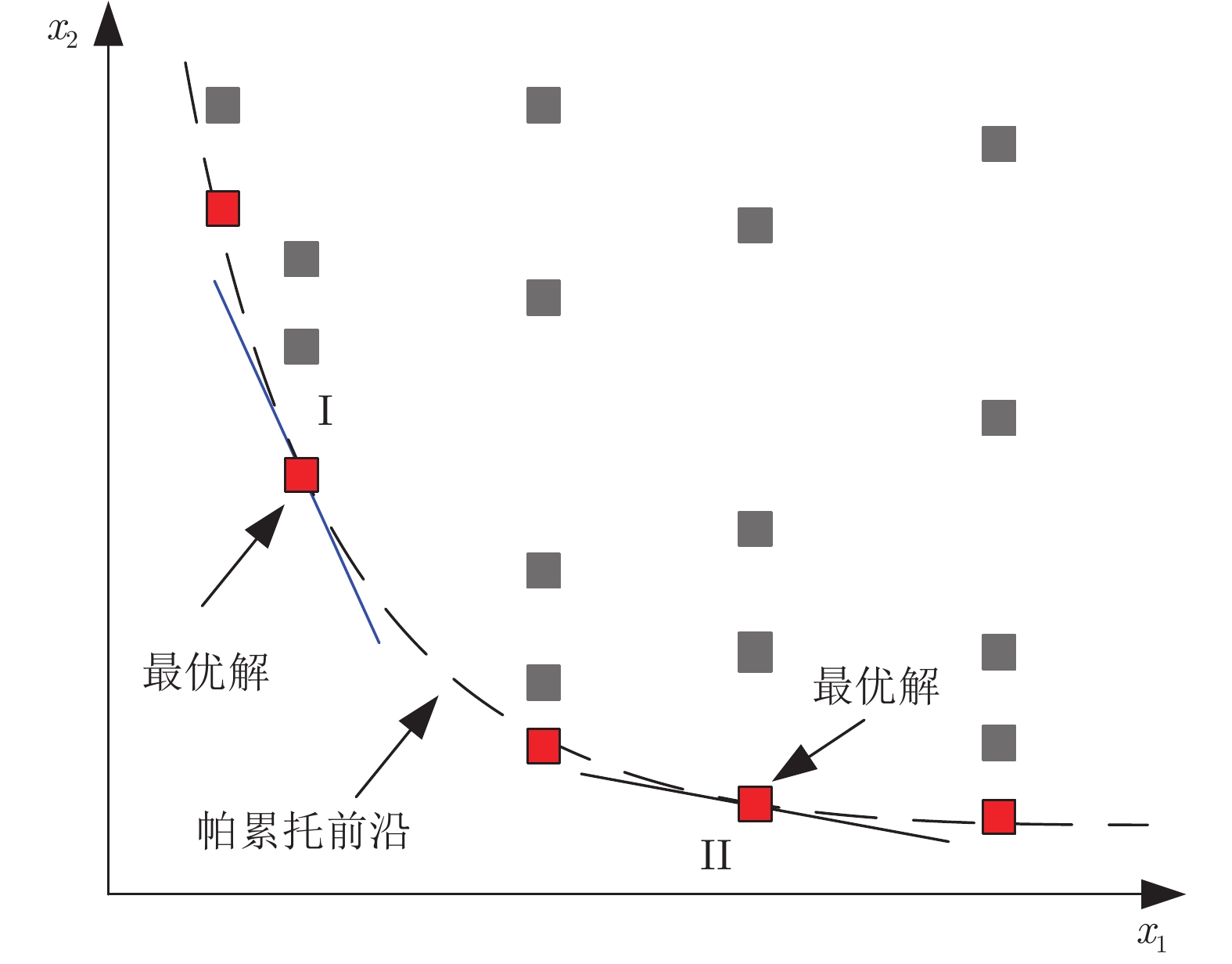
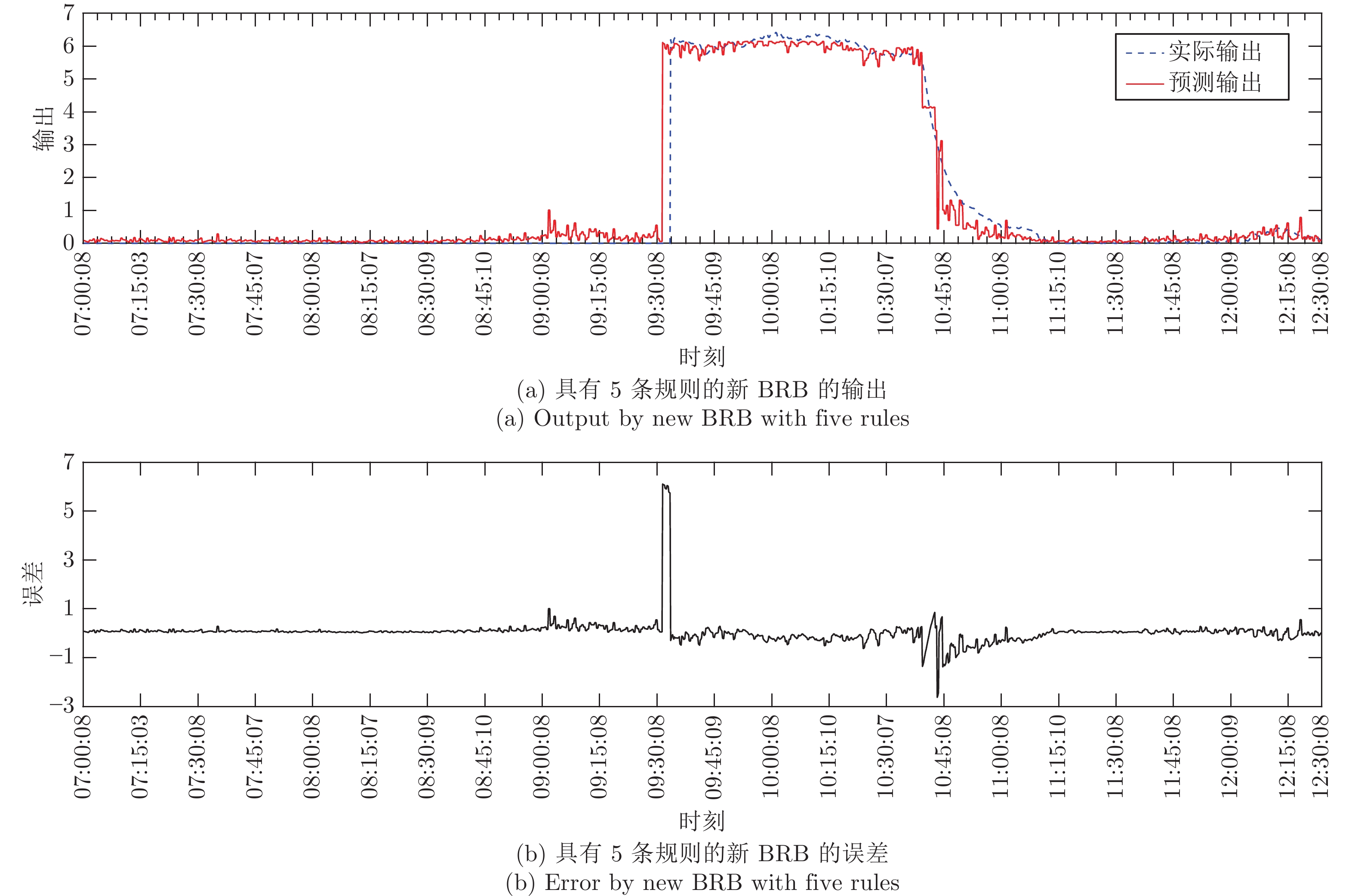
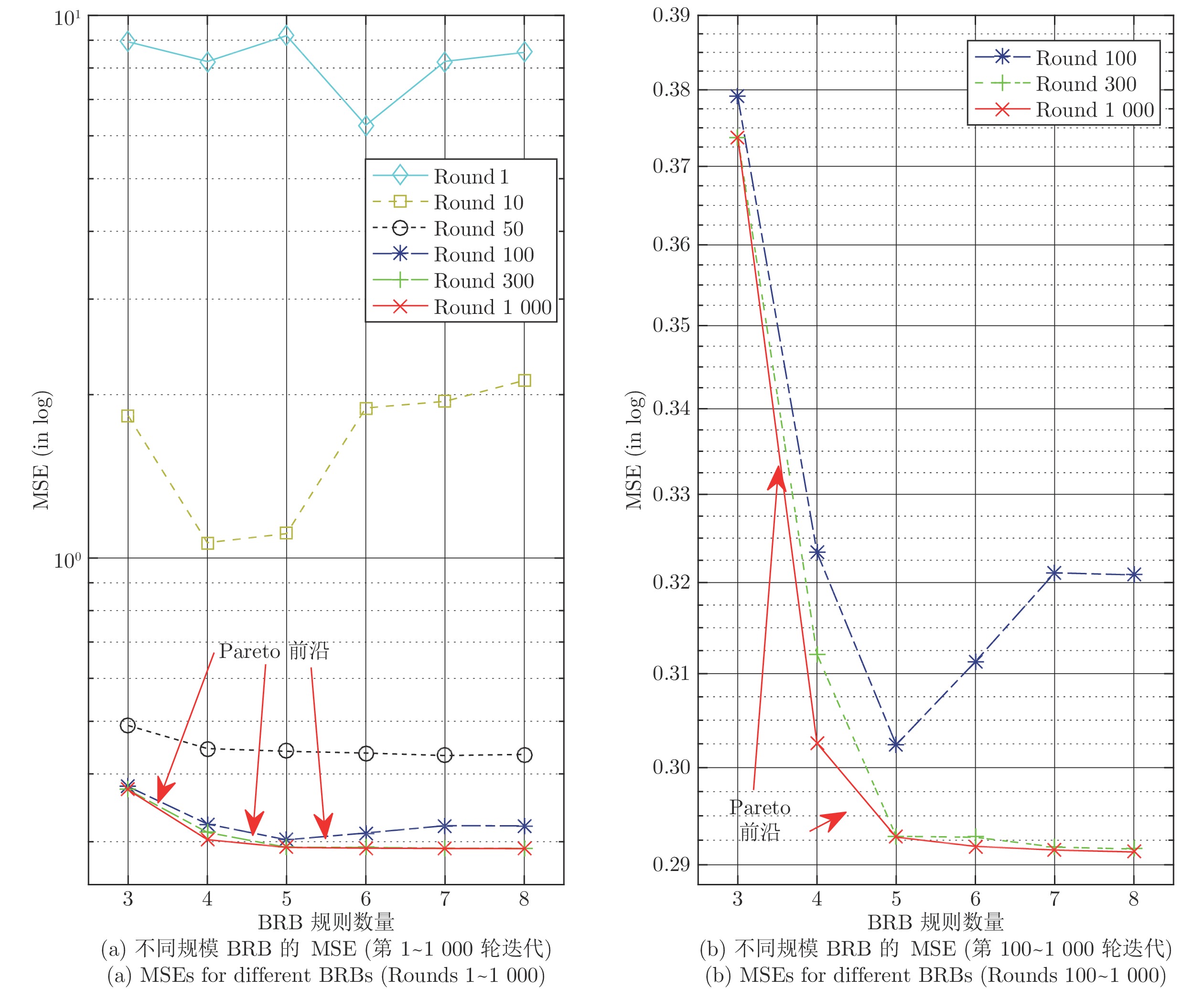
置信规则库(Belief rule base, BRB)的参数学习和结构学习共同影响着置信规则库的建模精度和复杂度. 为了提高BRB结构学习和参数学习的优化效率, 本文提出了一种基于平行多种群(Parallel multi-population)策略和冗余基因(Redundant genes)策略的置信规则库优化方法. 该方法采用平行多种群策略以实现对具有不同数量规则BRB同时进行优化的目的, 采用冗余基因策略以确保具有不同数量规则的BRB能够顺利进行(交叉, 变异等)相关优化操作. 最终自动生成具有不同数量规则BRB的最优解, 并得出帕累托前沿(Pareto frontier), 决策者可以根据自身偏好和实际问题需求, 综合权衡并在帕累托前沿中筛选最优解. 最后以某输油管道泄漏检测问题作为示例验证本文提出方法的有效性, 示例分析结果表明本文提出的方法可以一次生成具有多条规则BRB的最优解, 并且可以准确绘制出帕累托前沿, 为综合决策提供较强的决策支持.
置信规则库(Belief rule base, BRB)的参数学习和结构学习共同影响着置信规则库的建模精度和复杂度. 为了提高BRB结构学习和参数学习的优化效率, 本文提出了一种基于平行多种群(Parallel multi-population)策略和冗余基因(Redundant genes)策略的置信规则库优化方法. 该方法采用平行多种群策略以实现对具有不同数量规则BRB同时进行优化的目的, 采用冗余基因策略以确保具有不同数量规则的BRB能够顺利进行(交叉, 变异等)相关优化操作. 最终自动生成具有不同数量规则BRB的最优解, 并得出帕累托前沿(Pareto frontier), 决策者可以根据自身偏好和实际问题需求, 综合权衡并在帕累托前沿中筛选最优解. 最后以某输油管道泄漏检测问题作为示例验证本文提出方法的有效性, 示例分析结果表明本文提出的方法可以一次生成具有多条规则BRB的最优解, 并且可以准确绘制出帕累托前沿, 为综合决策提供较强的决策支持.
2022, 48(8): 2018-2027.
doi: 10.16383/j.aas.c200893
摘要:
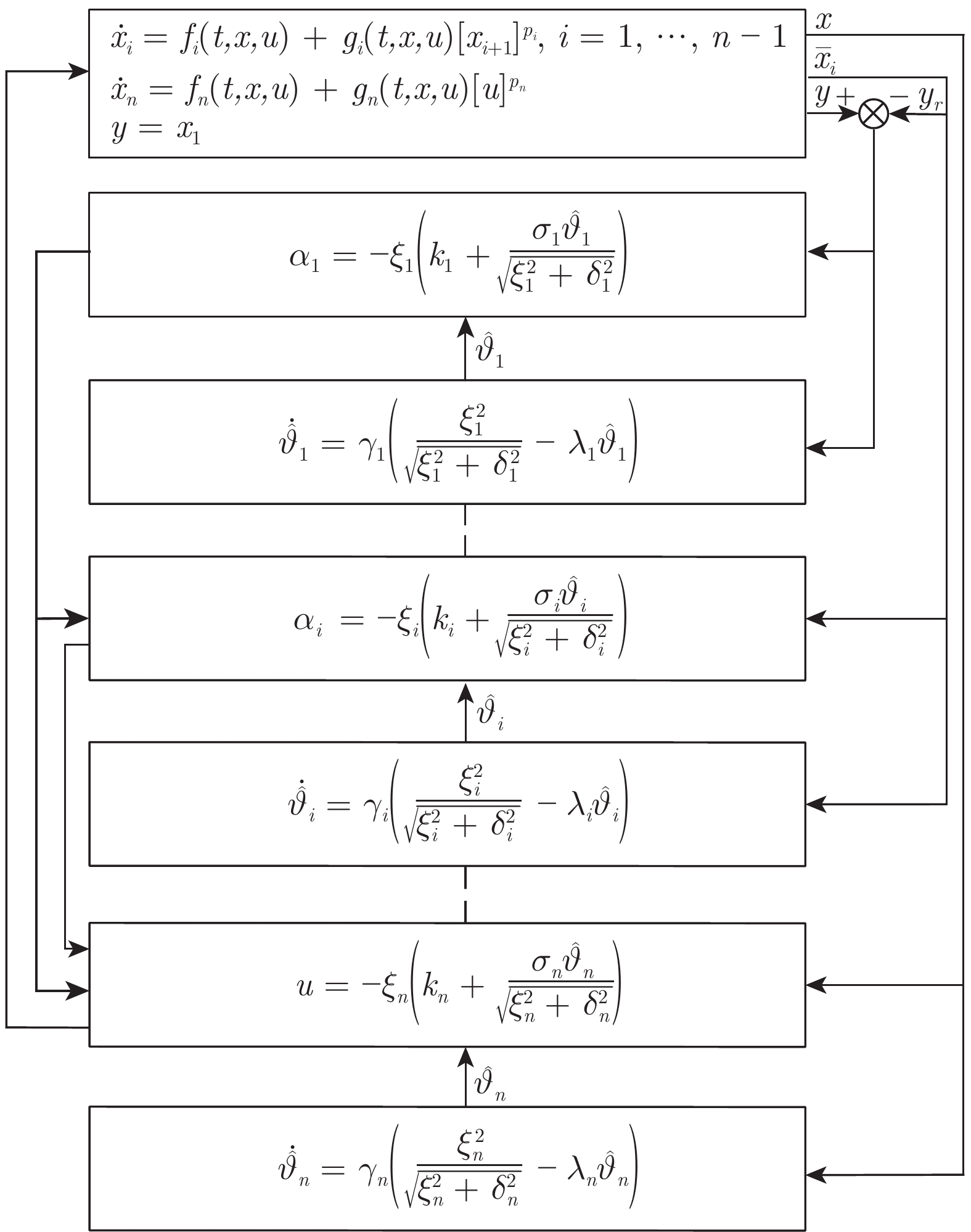
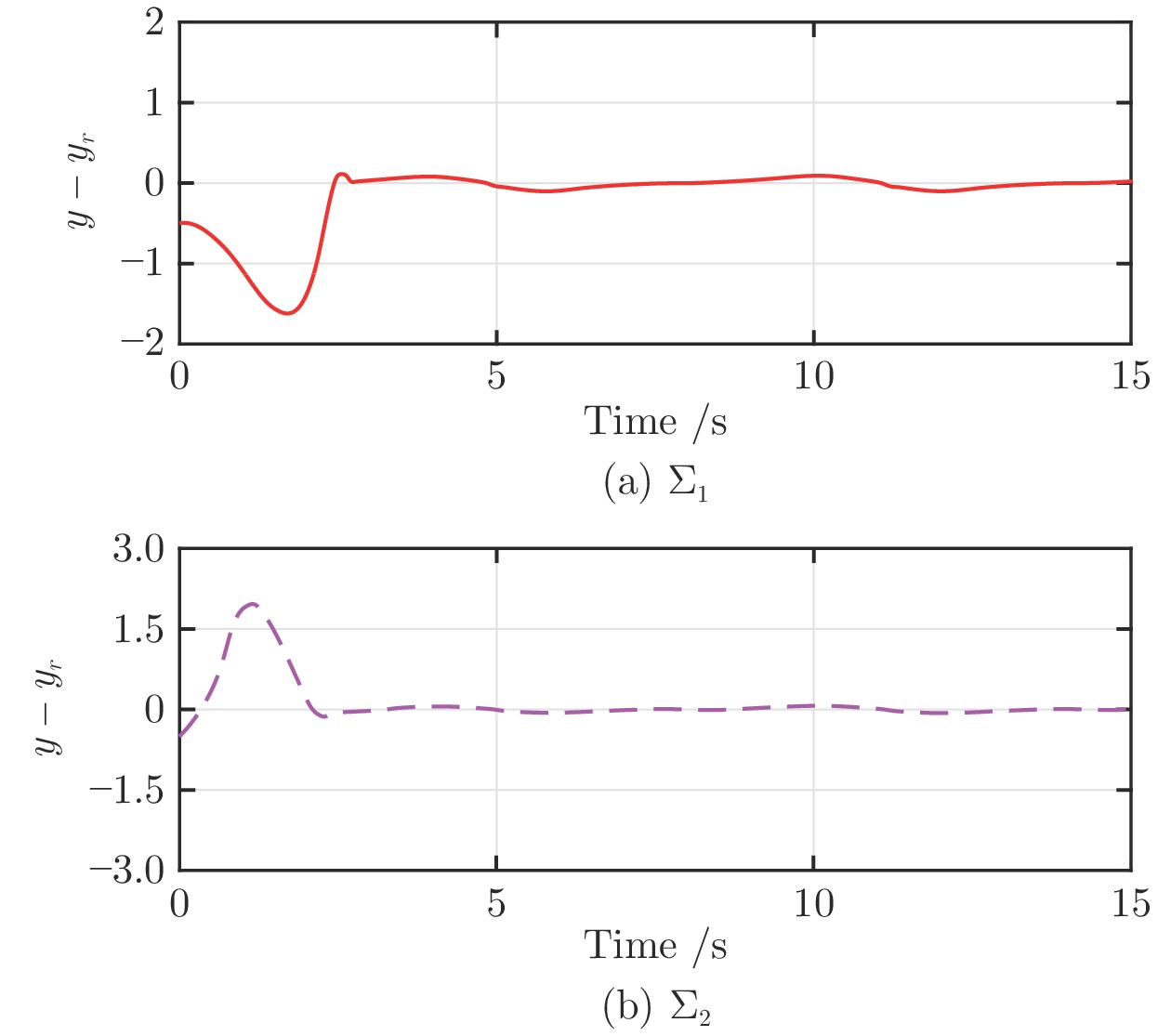
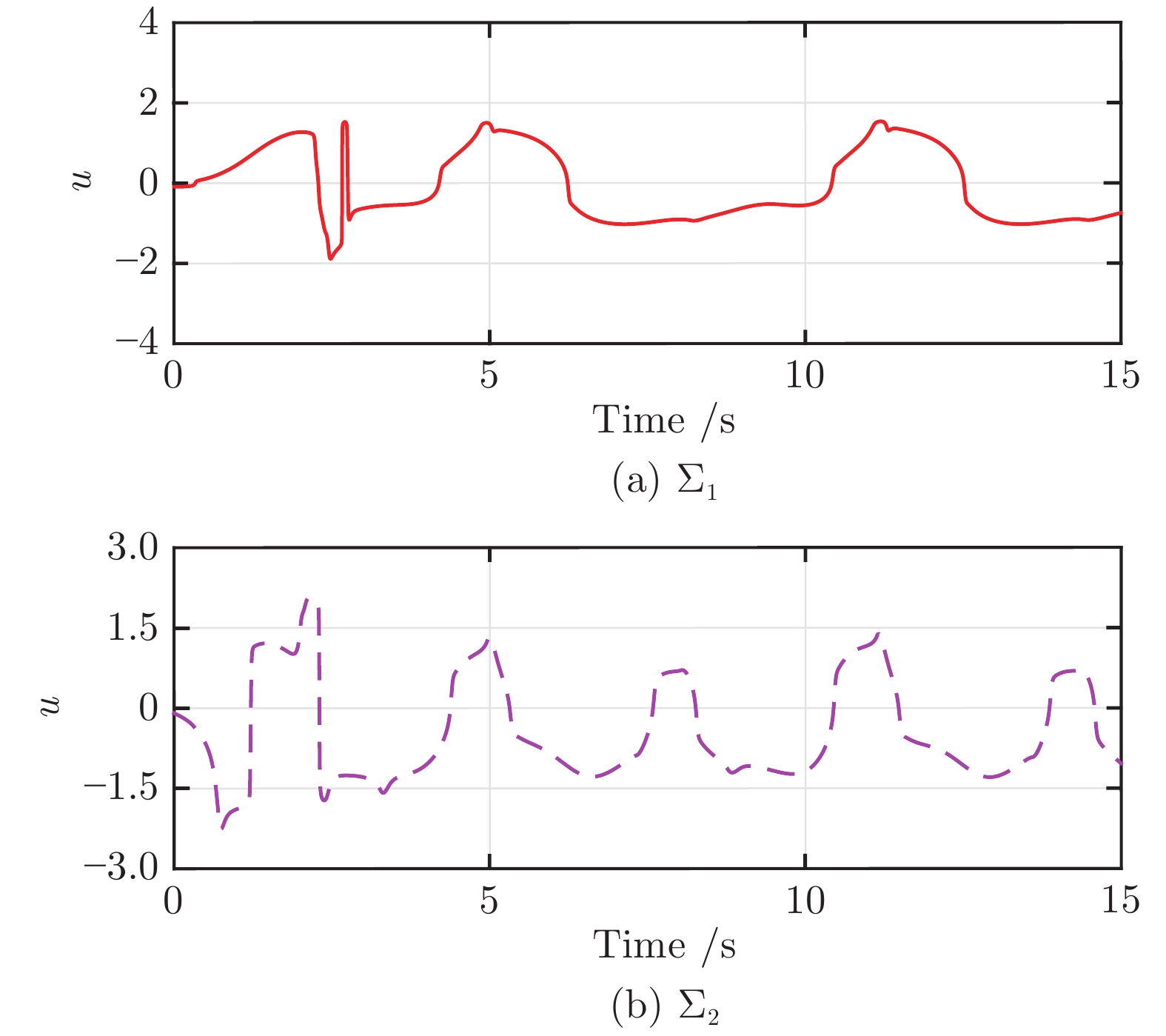
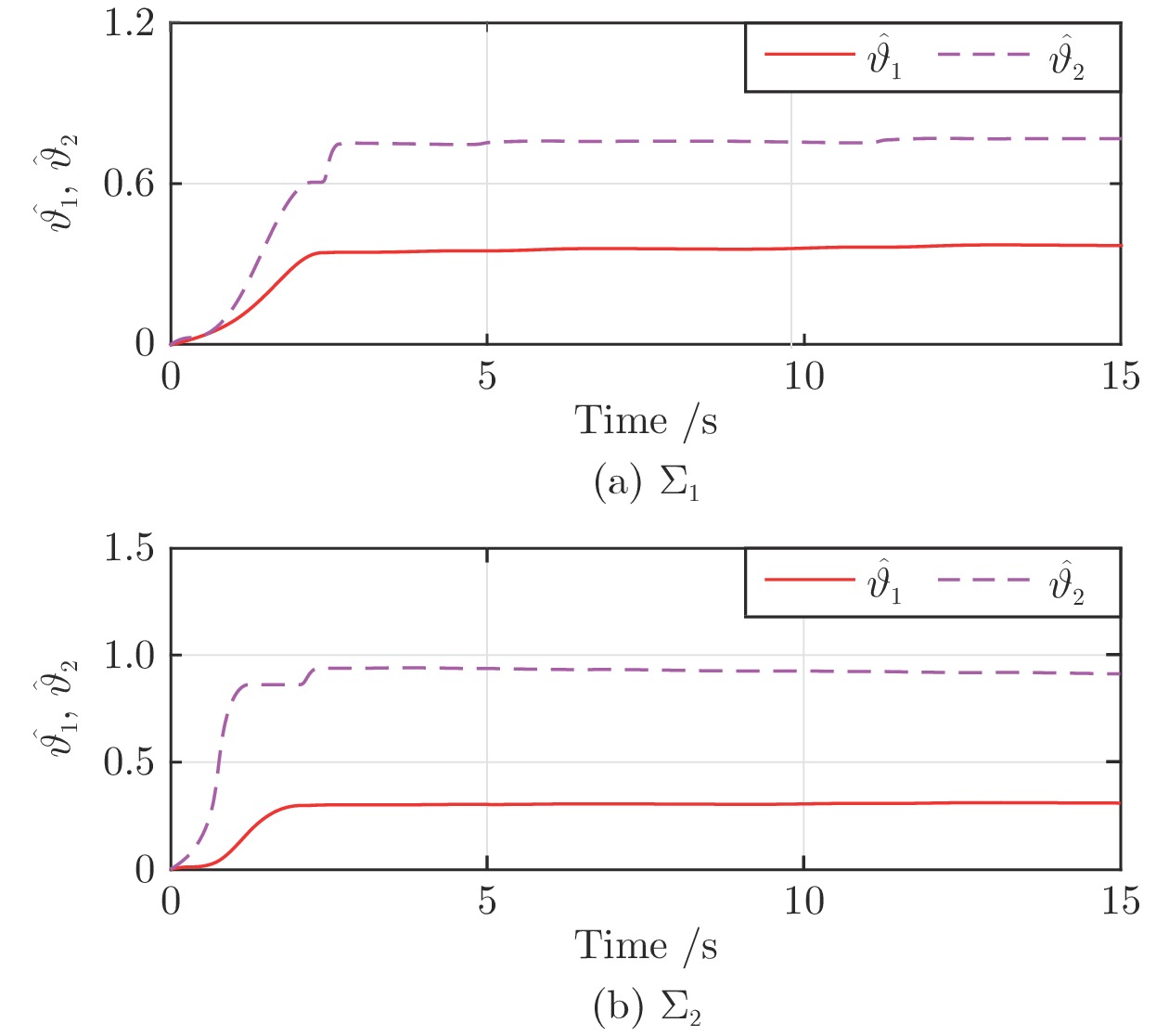
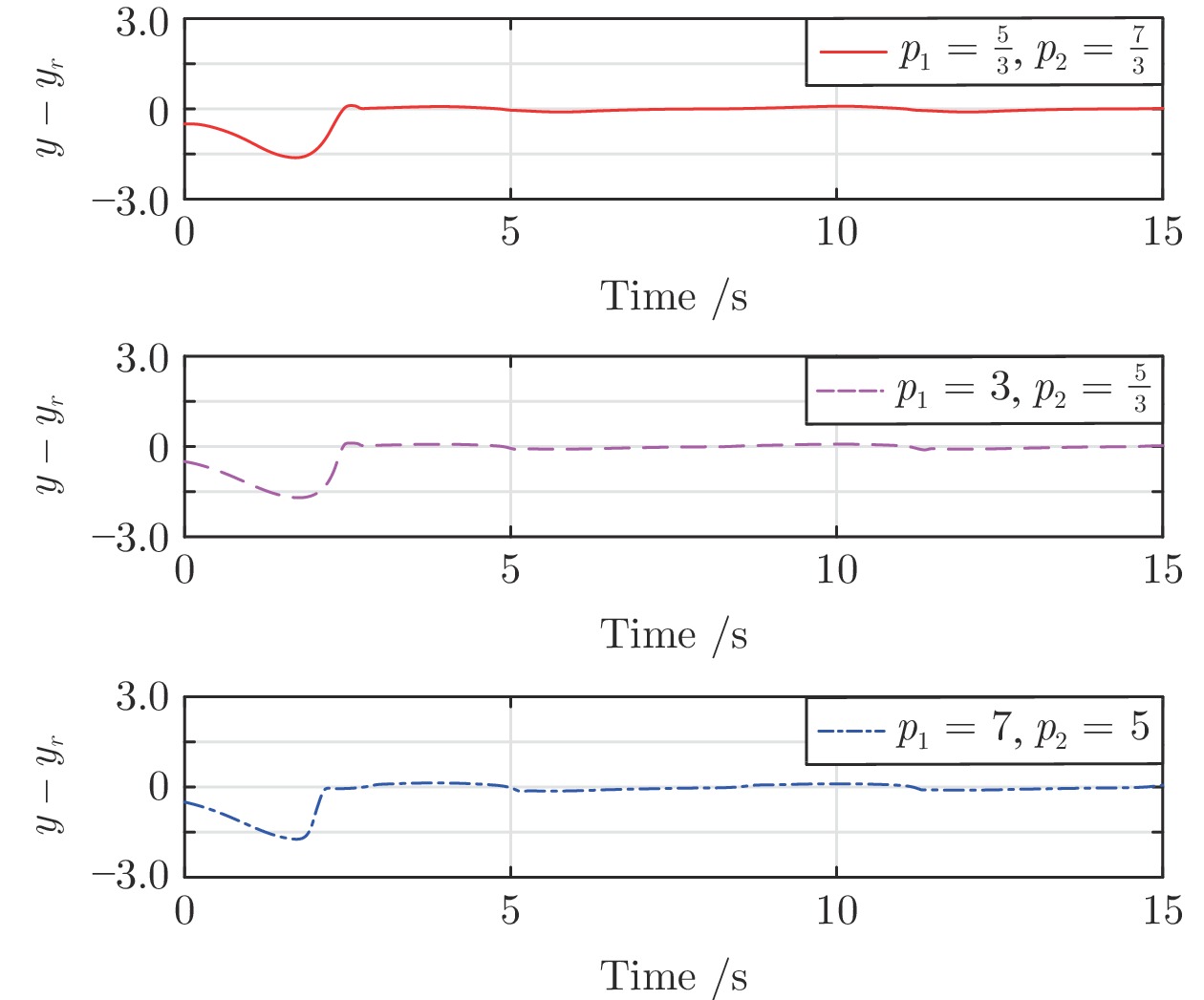
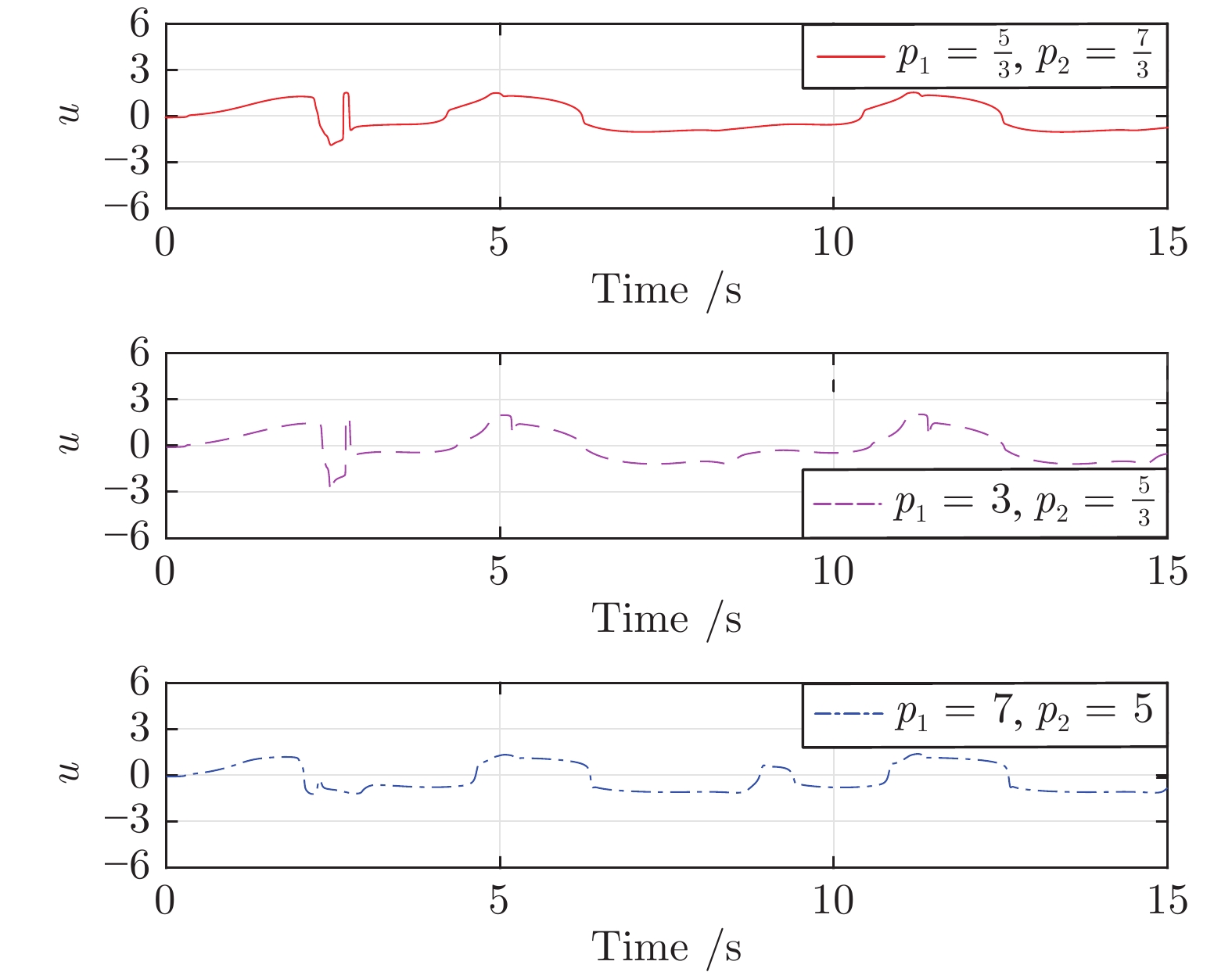
研究了一类具有未知幂次的高阶不确定非线性系统的自适应跟踪控制问题. 在无需系统函数先验知识的条件下, 采用积分反推技术和障碍李雅普诺夫函数, 提出了一种新颖的自适应跟踪控制算法. 该控制算法的显著特点是所设计的自适应控制器均与系统幂次无关, 并且能够保证闭环系统的所有信号皆有界. 仿真算例验证了该控制算法的有效性.
研究了一类具有未知幂次的高阶不确定非线性系统的自适应跟踪控制问题. 在无需系统函数先验知识的条件下, 采用积分反推技术和障碍李雅普诺夫函数, 提出了一种新颖的自适应跟踪控制算法. 该控制算法的显著特点是所设计的自适应控制器均与系统幂次无关, 并且能够保证闭环系统的所有信号皆有界. 仿真算例验证了该控制算法的有效性.
2022, 48(8): 2028-2038.
doi: 10.16383/j.aas.c190801
摘要:
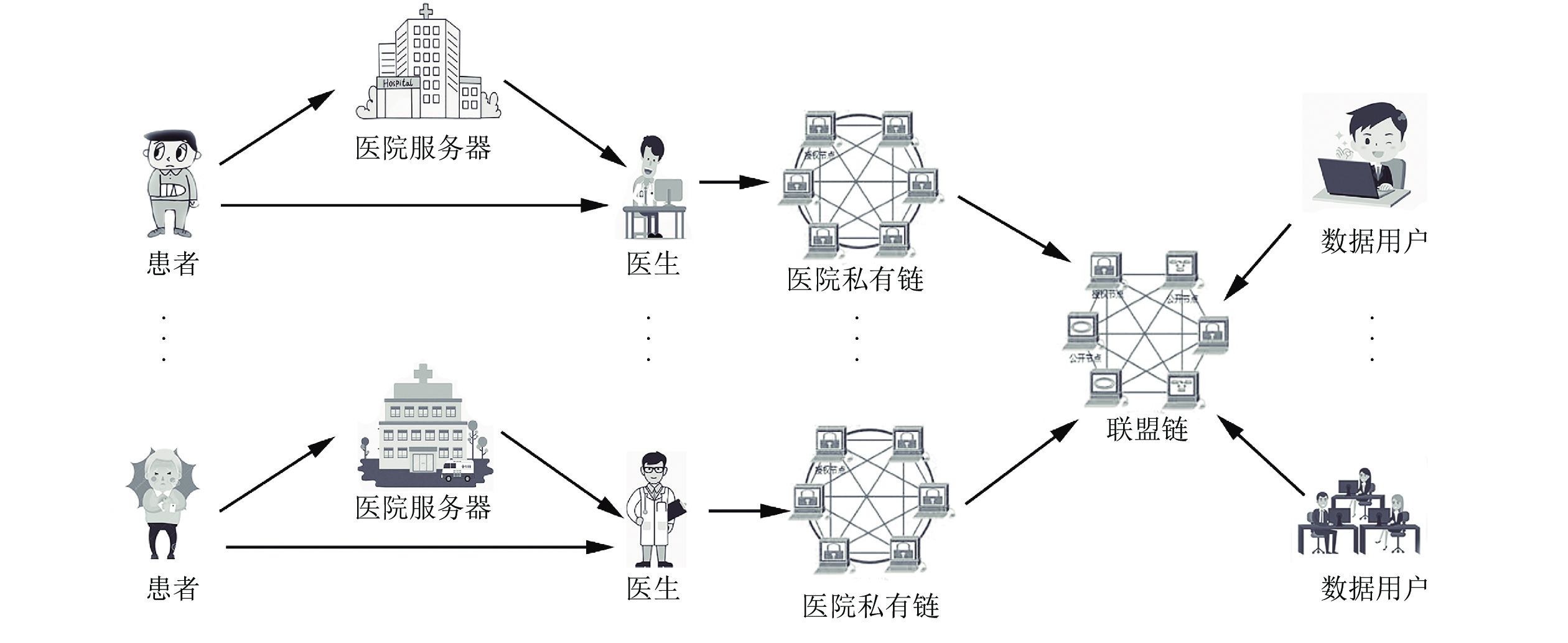
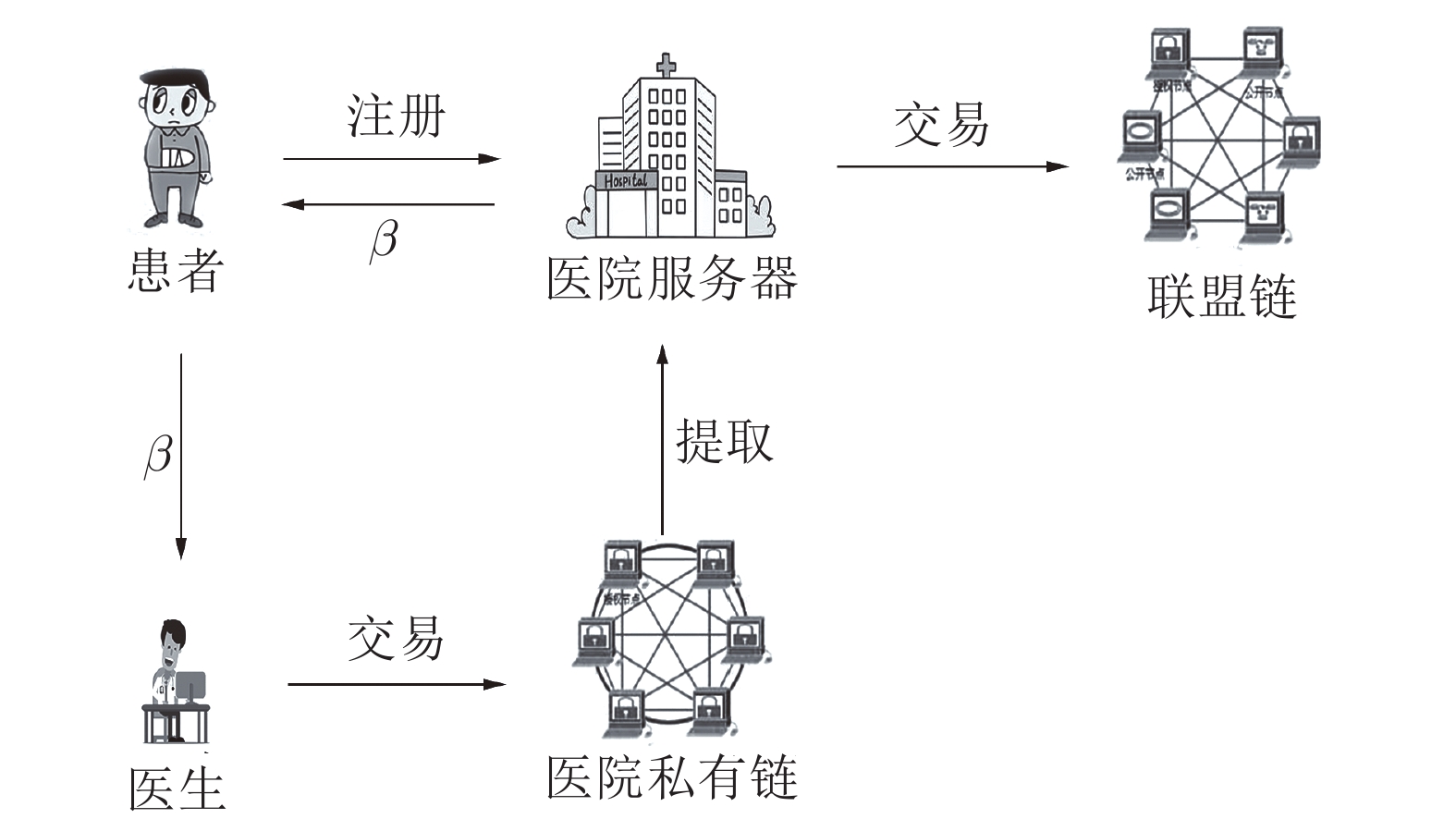
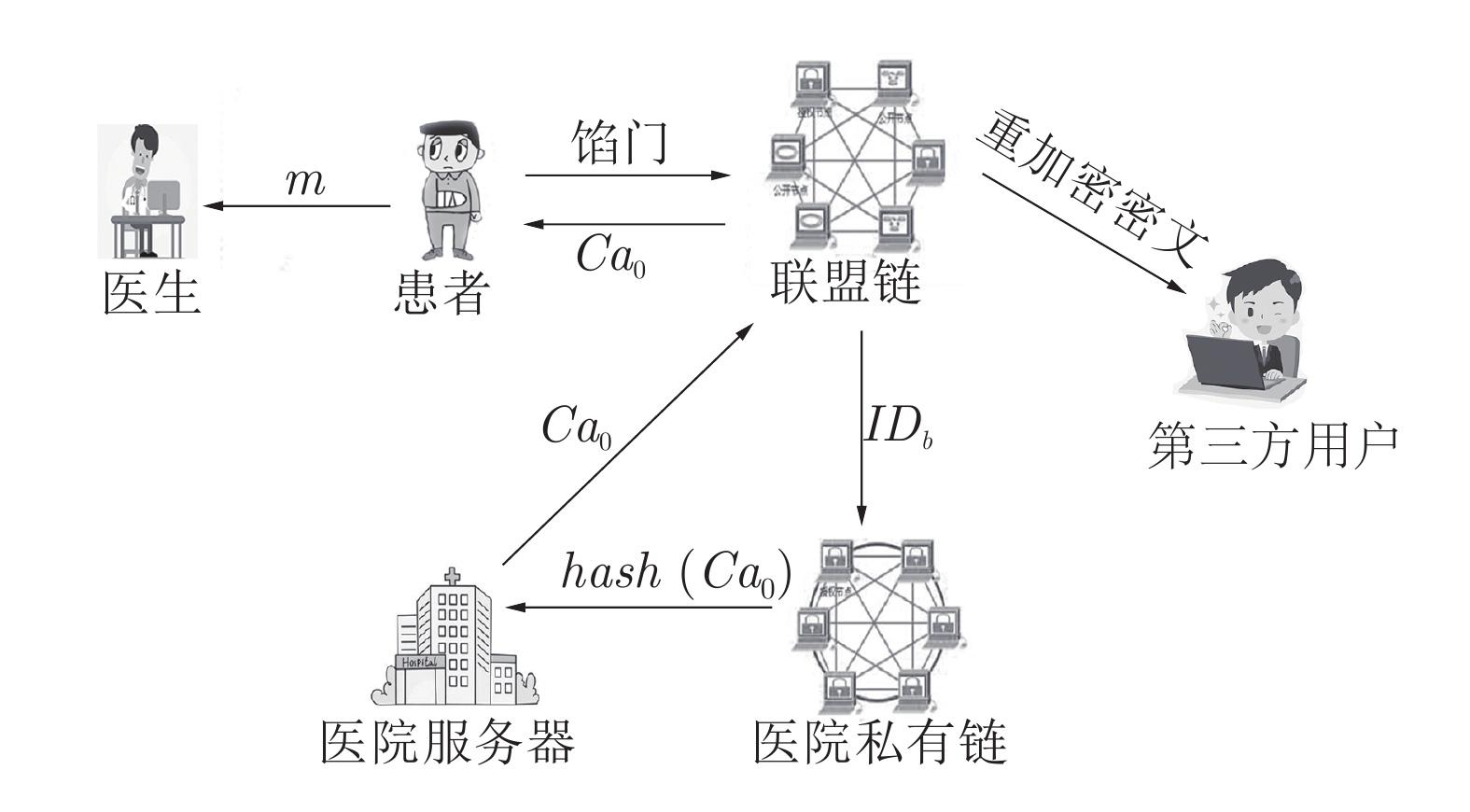
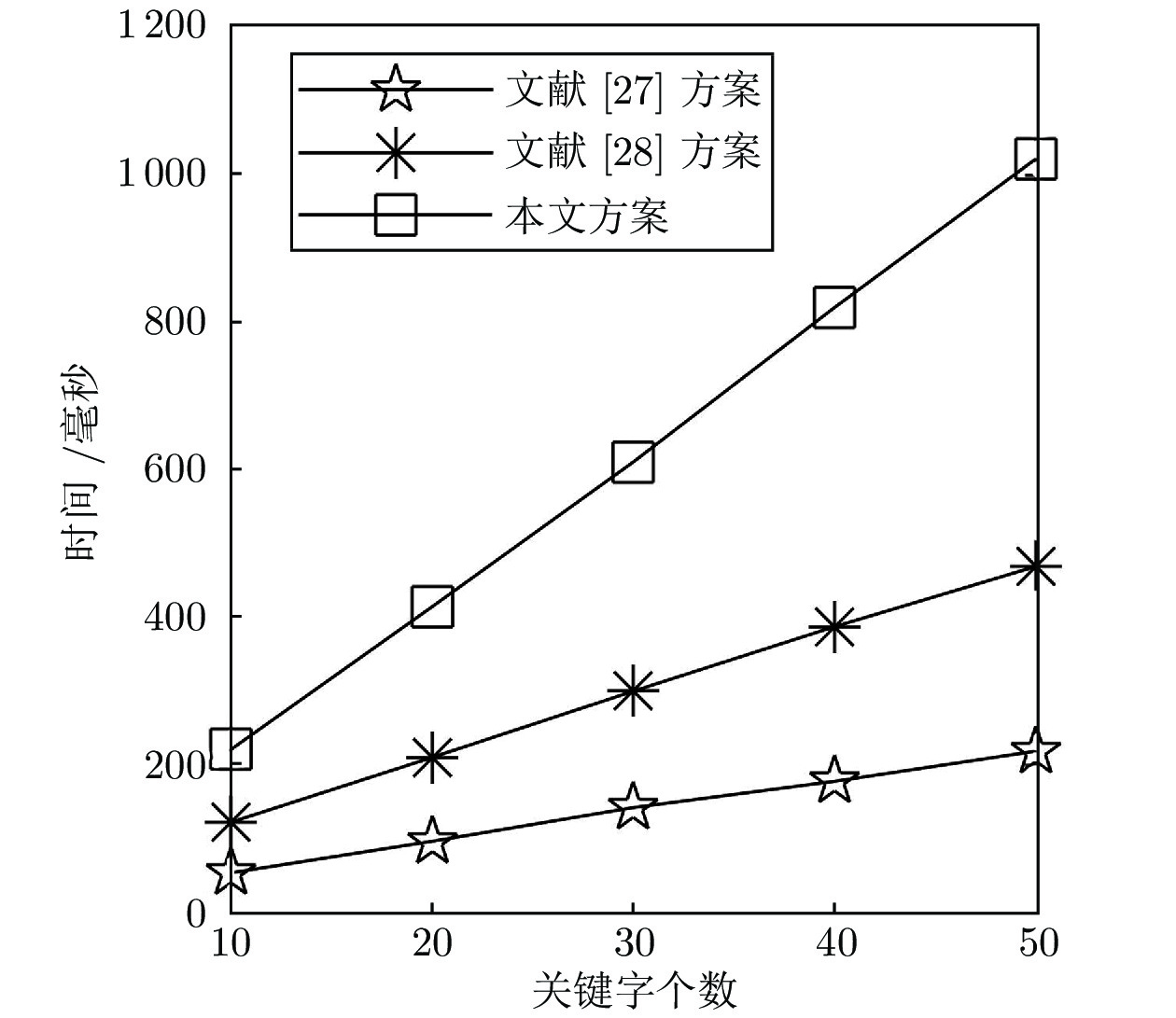
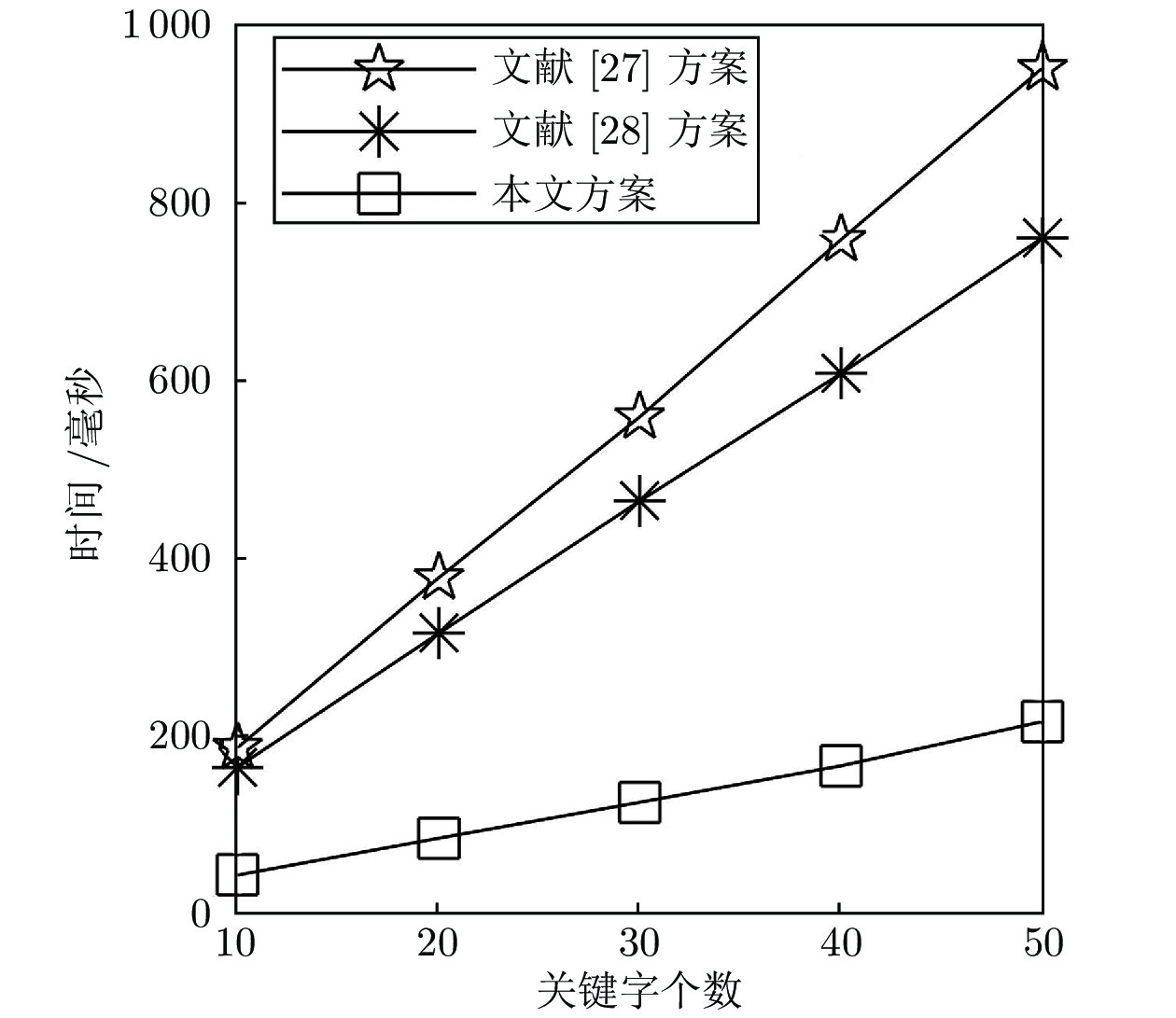
以区块链为数据存储平台的电子病历系统是当下研究的热点. 存储在区块链上的数据是不可变的, 这加强了数据的安全性. 提出了一个基于区块链的电子病历数据共享方案, 实现了患者和第三方数据用户在不侵犯患者隐私的前提下共享患者电子病历. 使用私有链与联盟链构造方案的系统模型, 医院服务器上存储患者的电子病历密文, 私有链上存储患者病历密文的哈希值和关键字索引, 联盟链上存储由关键字索引构成的安全索引. 同时利用可搜索加密技术实现了联盟链上对关键字的安全搜索, 运用代理重加密算法实现了第三方数据用户对患者电子病历的共享. 通过数值实验对方案进行了性能评估.
以区块链为数据存储平台的电子病历系统是当下研究的热点. 存储在区块链上的数据是不可变的, 这加强了数据的安全性. 提出了一个基于区块链的电子病历数据共享方案, 实现了患者和第三方数据用户在不侵犯患者隐私的前提下共享患者电子病历. 使用私有链与联盟链构造方案的系统模型, 医院服务器上存储患者的电子病历密文, 私有链上存储患者病历密文的哈希值和关键字索引, 联盟链上存储由关键字索引构成的安全索引. 同时利用可搜索加密技术实现了联盟链上对关键字的安全搜索, 运用代理重加密算法实现了第三方数据用户对患者电子病历的共享. 通过数值实验对方案进行了性能评估.
2022, 48(8): 2039-2049.
doi: 10.16383/j.aas.c190599
摘要:
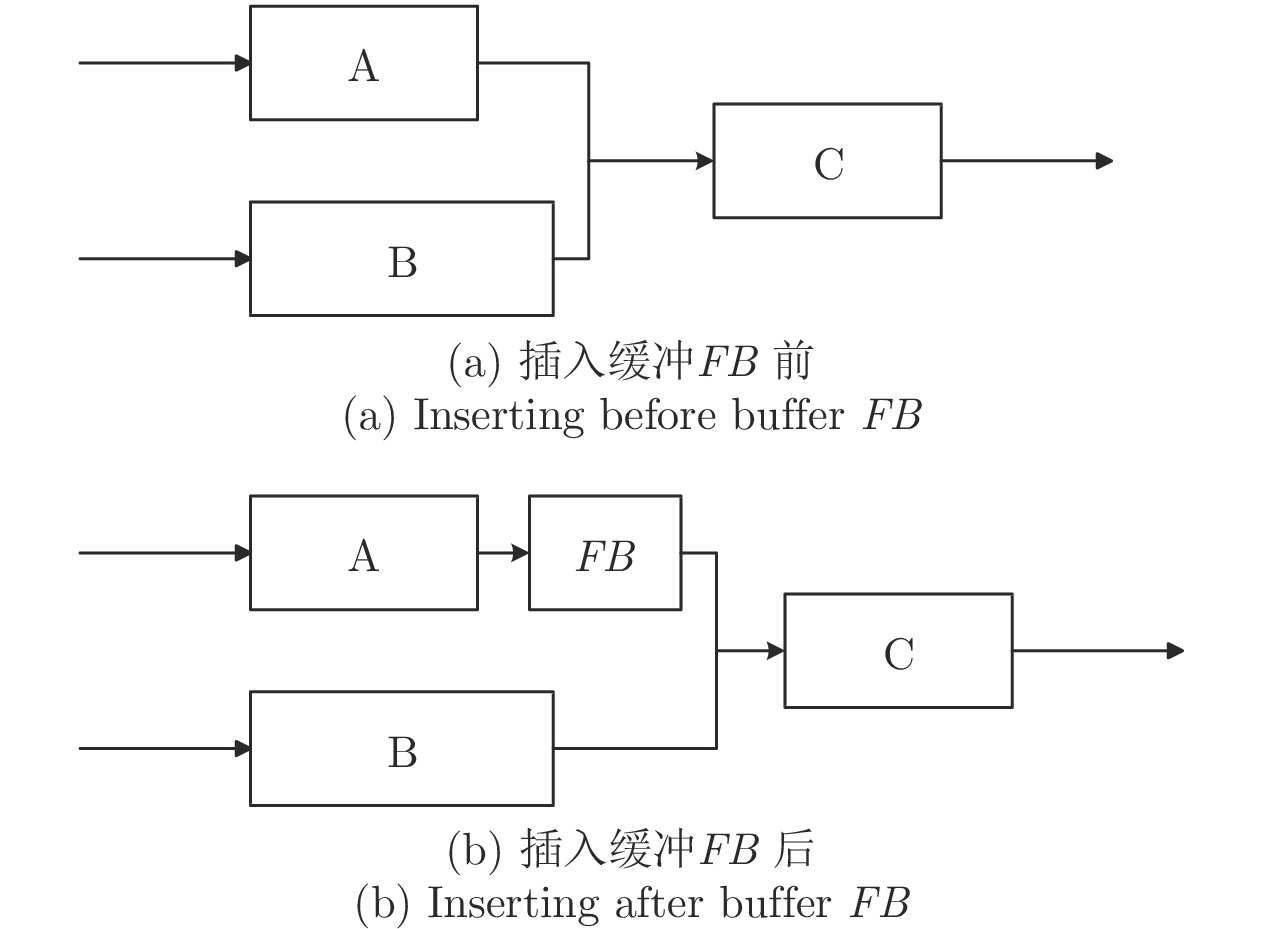
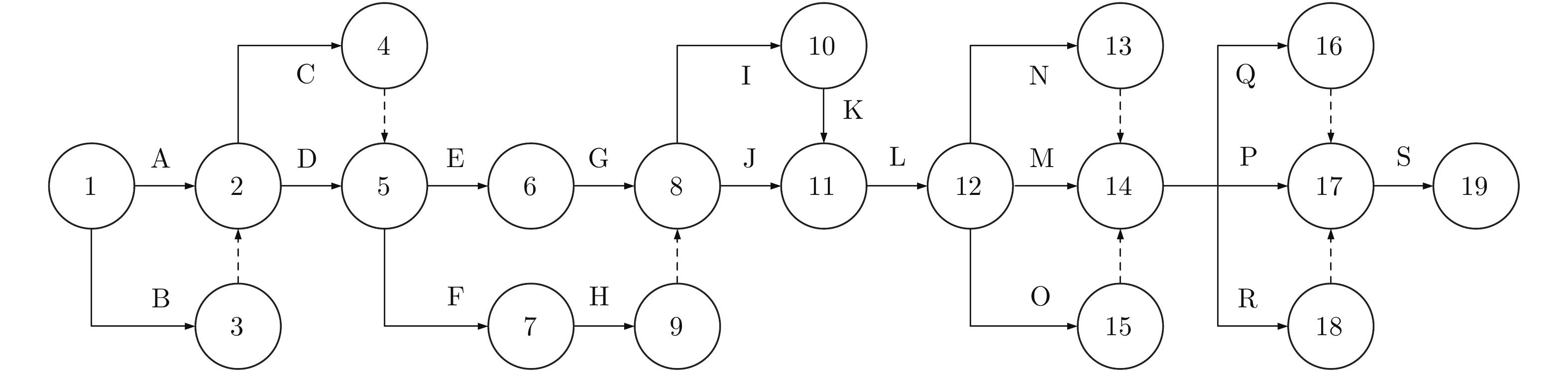
为解决缓冲区设置不合理带来的项目间工序松弛、工期延误等问题, 基于信息熵理论提出了一种关键链缓冲区设置方法. 首先, 提出了复杂熵、资源熵和人因熵的概念及其度量方法, 运用熵的概念量化诸多不确定因素对工序造成的影响; 其次, 提出了基于区间直觉梯形模糊数的人因熵度量步骤与方法; 最后, 给出了工序工期、项目缓冲和汇入缓冲的熵模型与修正模型, 充分考虑了人的行为因素对项目进度的影响, 并通过算例验证了模型的实用性.
为解决缓冲区设置不合理带来的项目间工序松弛、工期延误等问题, 基于信息熵理论提出了一种关键链缓冲区设置方法. 首先, 提出了复杂熵、资源熵和人因熵的概念及其度量方法, 运用熵的概念量化诸多不确定因素对工序造成的影响; 其次, 提出了基于区间直觉梯形模糊数的人因熵度量步骤与方法; 最后, 给出了工序工期、项目缓冲和汇入缓冲的熵模型与修正模型, 充分考虑了人的行为因素对项目进度的影响, 并通过算例验证了模型的实用性.

2022, 48(8): 2050-2061.
doi: 10.16383/j.aas.c190847
摘要:
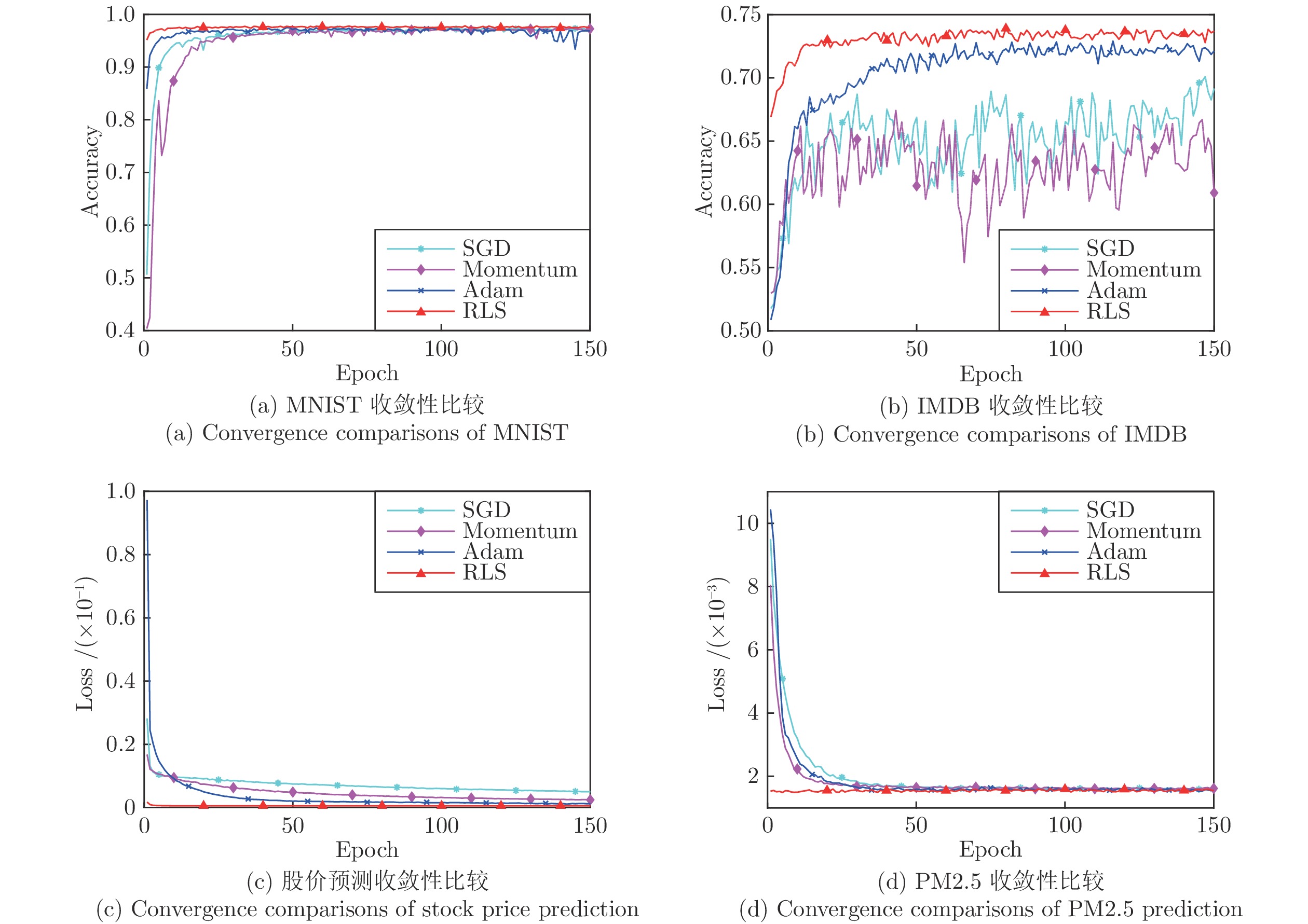
针对循环神经网络(Recurrent neural networks, RNNs)一阶优化算法学习效率不高和二阶优化算法时空开销过大, 提出一种新的迷你批递归最小二乘优化算法. 所提算法采用非激活线性输出误差替代传统的激活输出误差反向传播, 并结合加权线性最小二乘目标函数关于隐藏层线性输出的等效梯度, 逐层导出RNNs参数的迷你批递归最小二乘解. 相较随机梯度下降算法, 所提算法只在RNNs的隐藏层和输出层分别增加了一个协方差矩阵, 其时间复杂度和空间复杂度仅为随机梯度下降算法的3倍左右. 此外, 本文还就所提算法的遗忘因子自适应问题和过拟合问题分别给出一种解决办法. 仿真结果表明, 无论是对序列数据的分类问题还是预测问题, 所提算法的收敛速度要优于现有主流一阶优化算法, 而且在超参数的设置上具有较好的鲁棒性.
针对循环神经网络(Recurrent neural networks, RNNs)一阶优化算法学习效率不高和二阶优化算法时空开销过大, 提出一种新的迷你批递归最小二乘优化算法. 所提算法采用非激活线性输出误差替代传统的激活输出误差反向传播, 并结合加权线性最小二乘目标函数关于隐藏层线性输出的等效梯度, 逐层导出RNNs参数的迷你批递归最小二乘解. 相较随机梯度下降算法, 所提算法只在RNNs的隐藏层和输出层分别增加了一个协方差矩阵, 其时间复杂度和空间复杂度仅为随机梯度下降算法的3倍左右. 此外, 本文还就所提算法的遗忘因子自适应问题和过拟合问题分别给出一种解决办法. 仿真结果表明, 无论是对序列数据的分类问题还是预测问题, 所提算法的收敛速度要优于现有主流一阶优化算法, 而且在超参数的设置上具有较好的鲁棒性.

2022, 48(8): 2062-2074.
doi: 10.16383/j.aas.c200712
摘要:
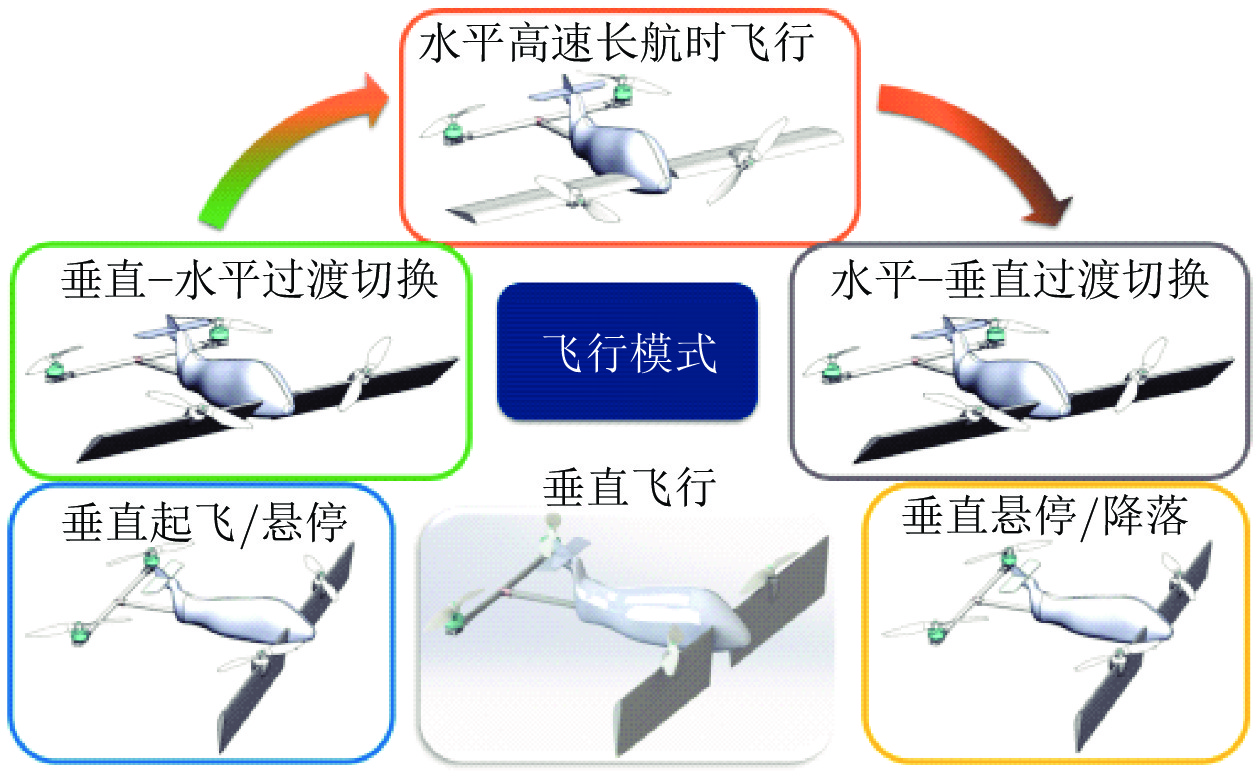
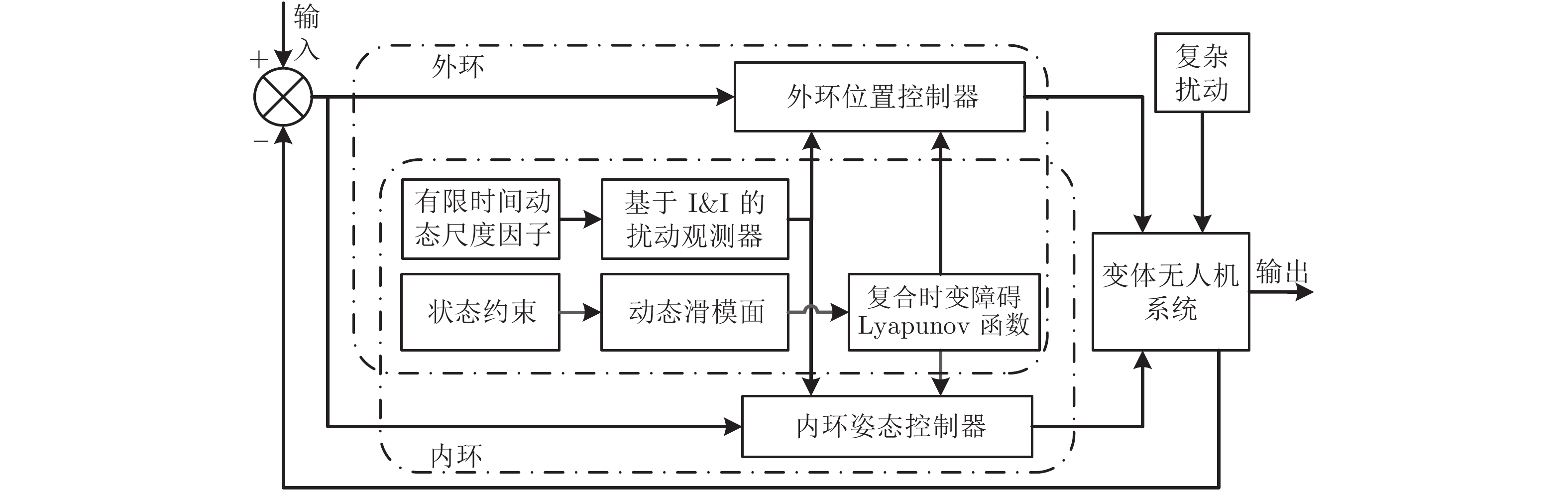
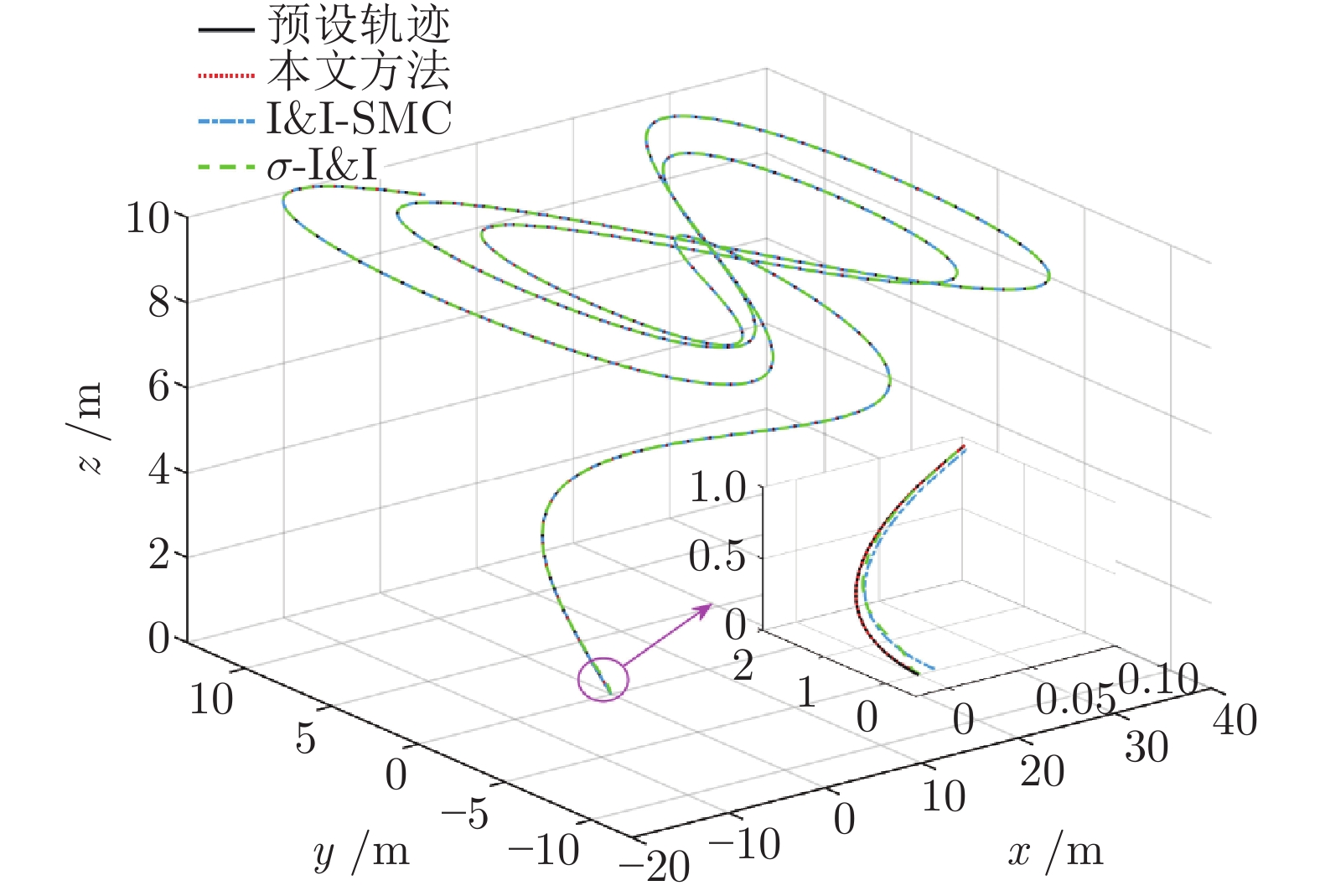
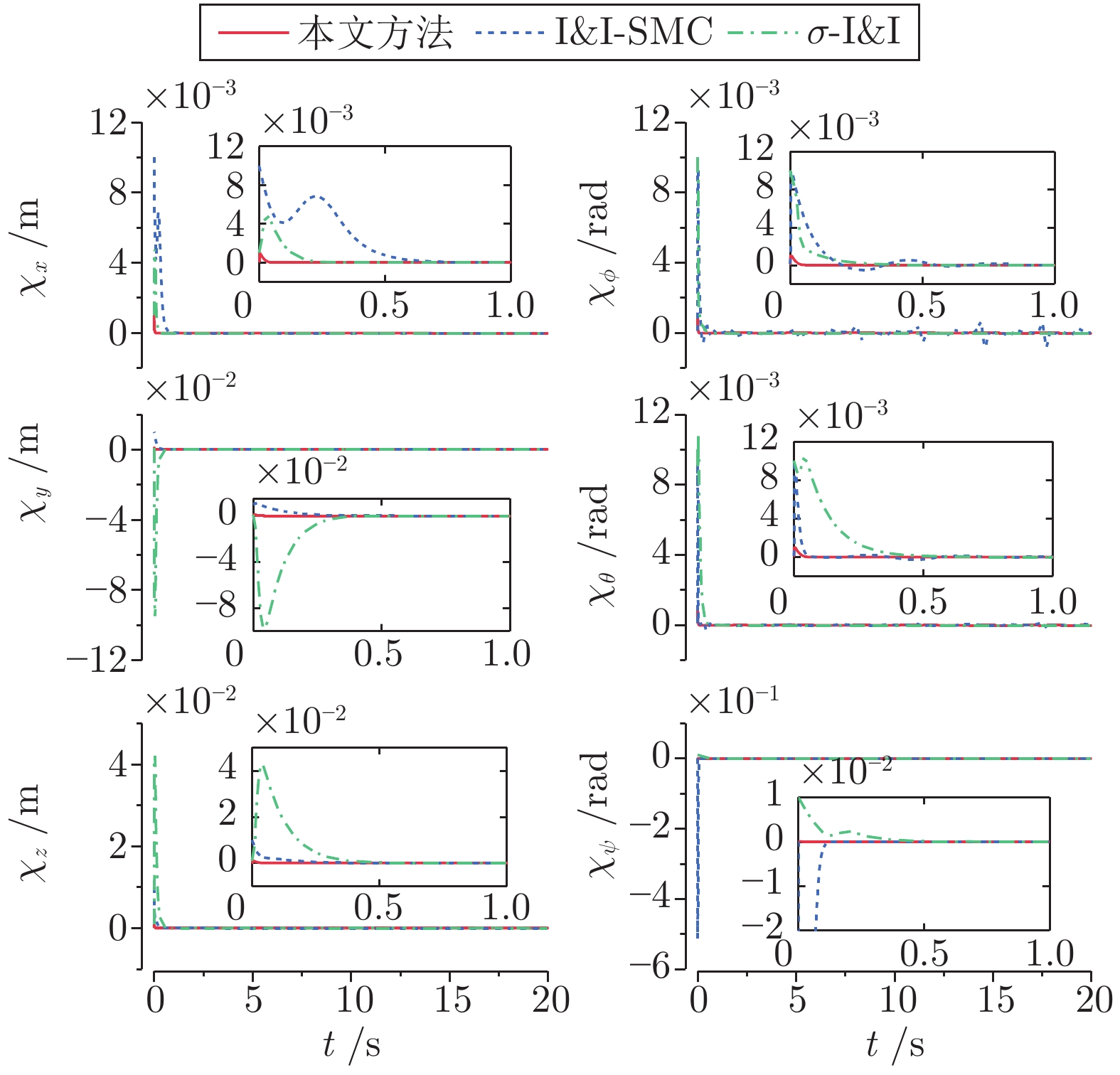
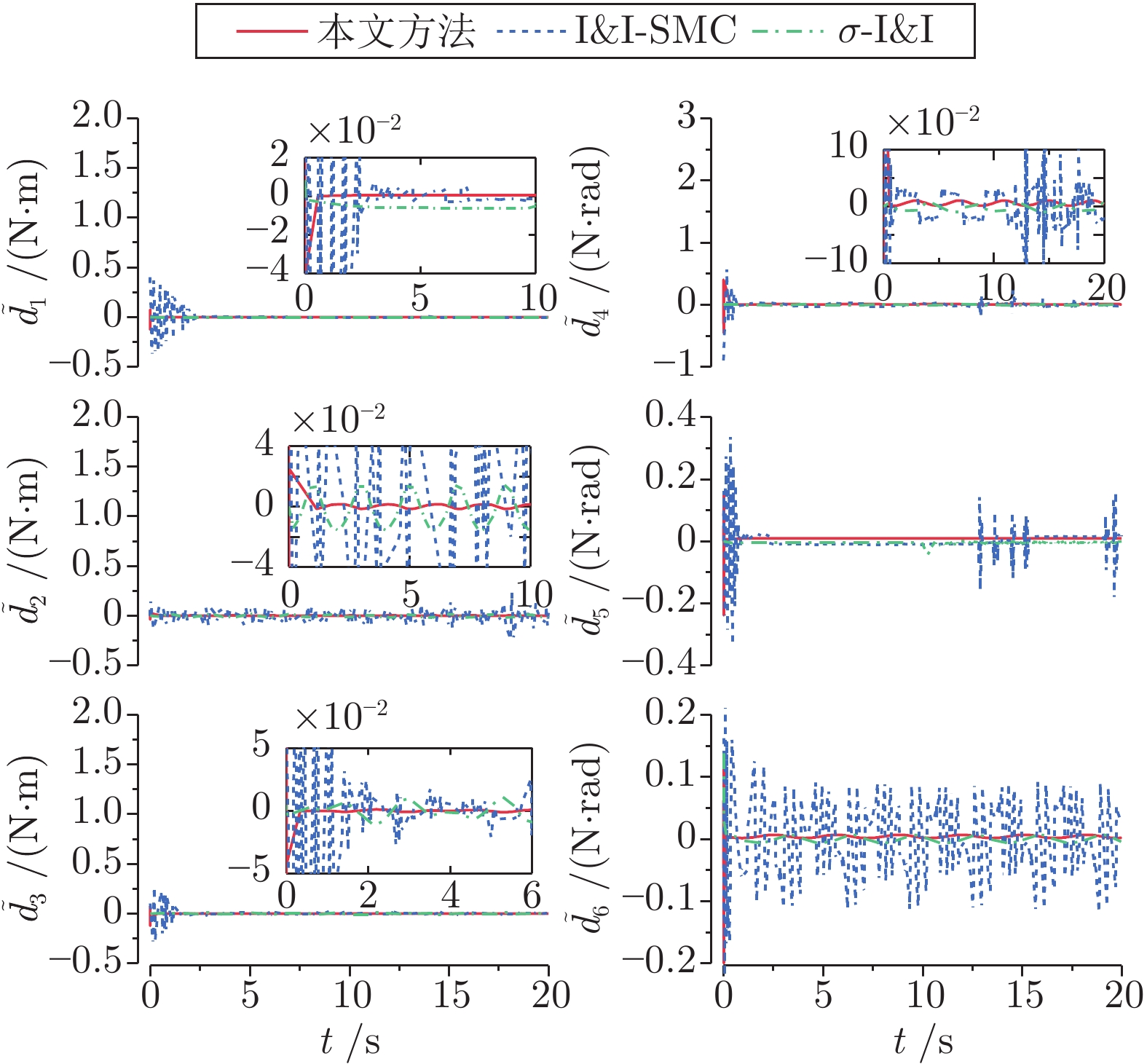
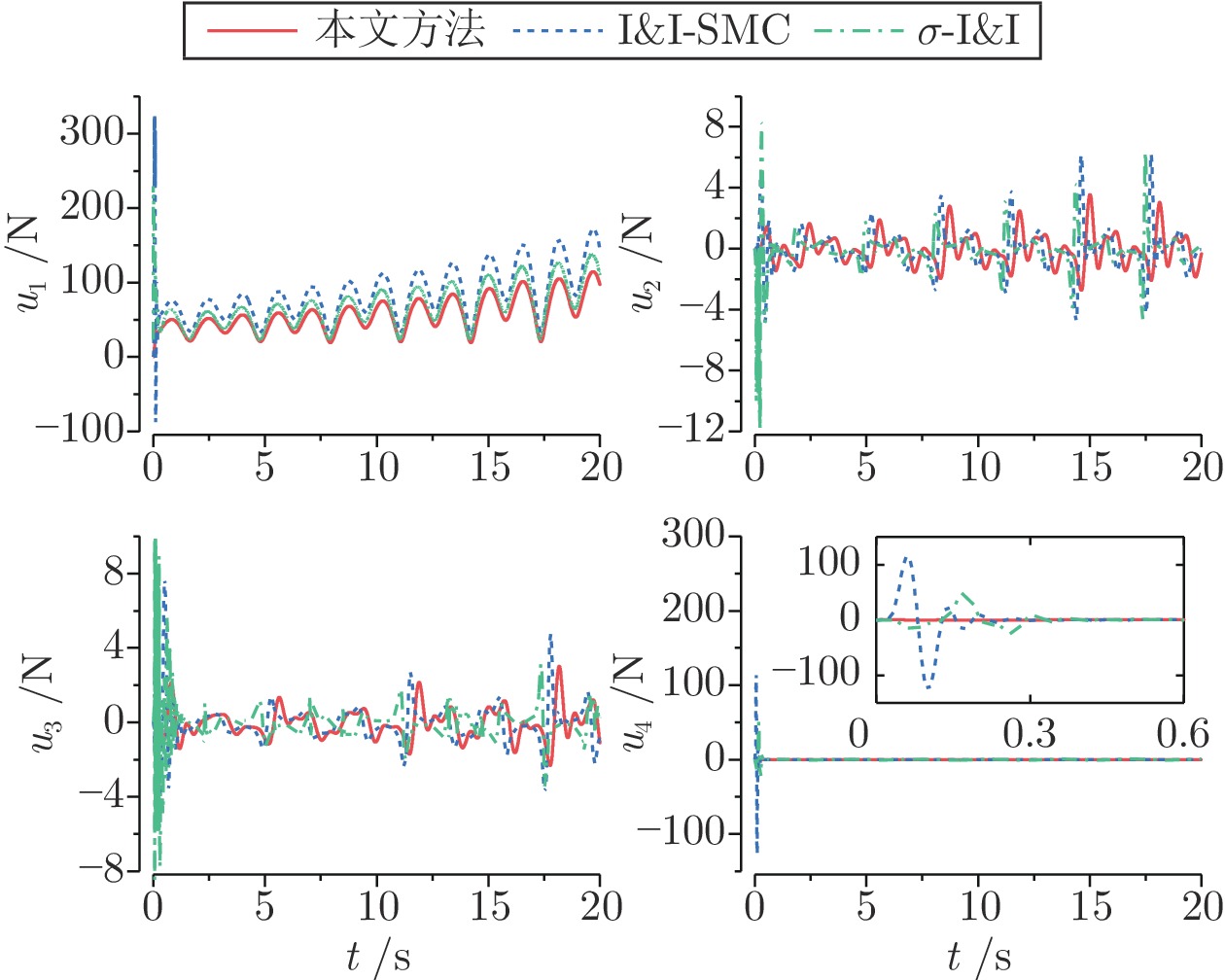
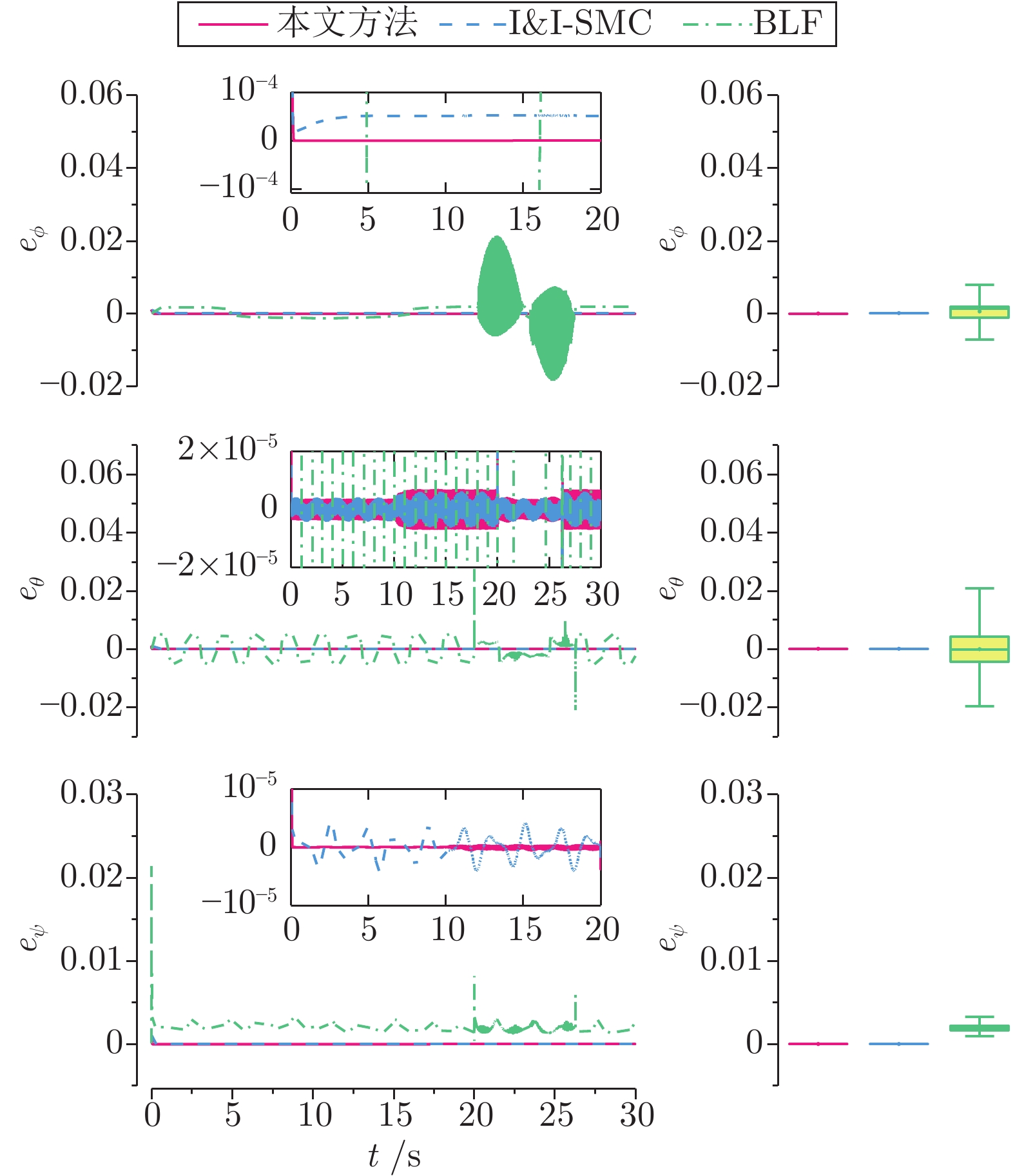
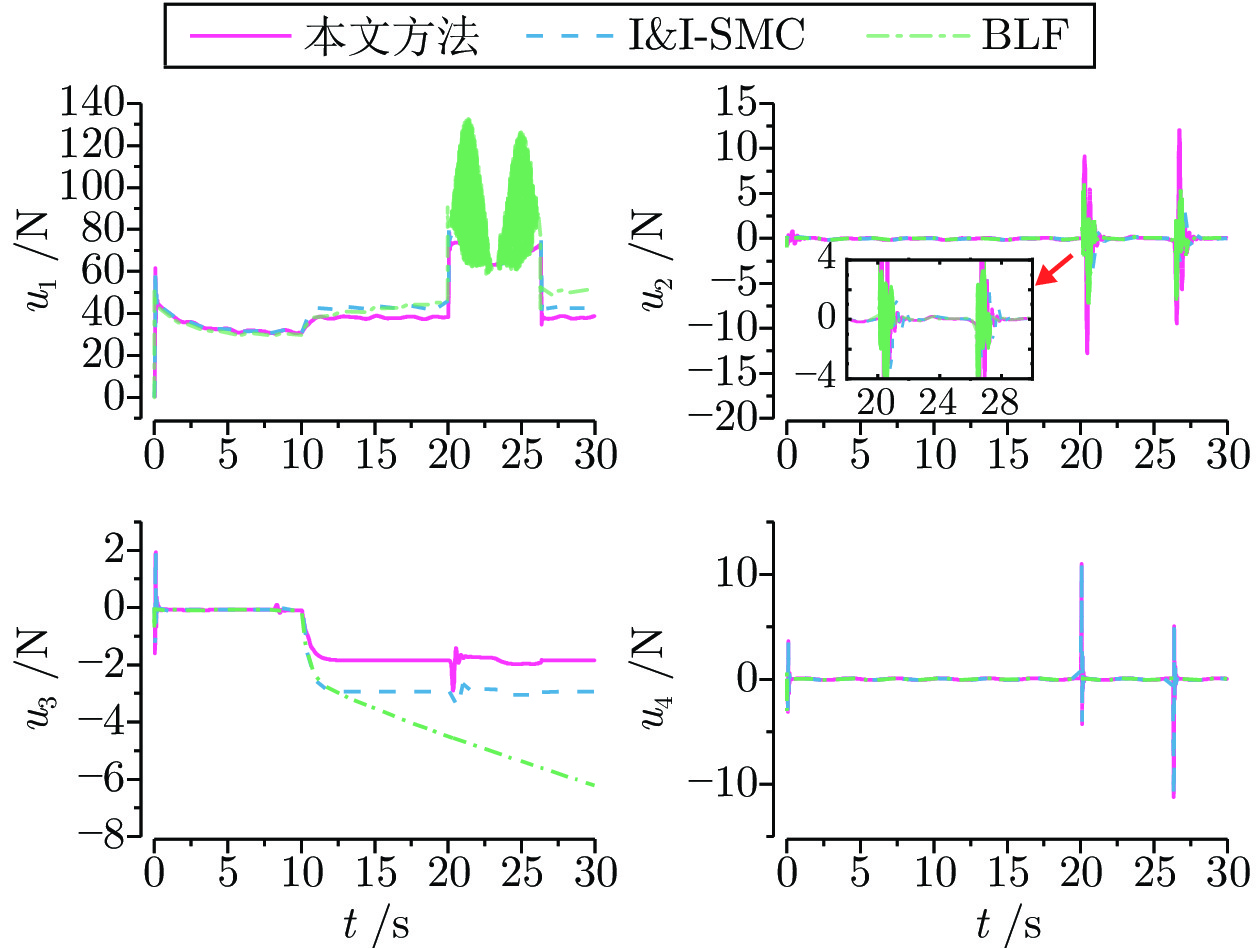
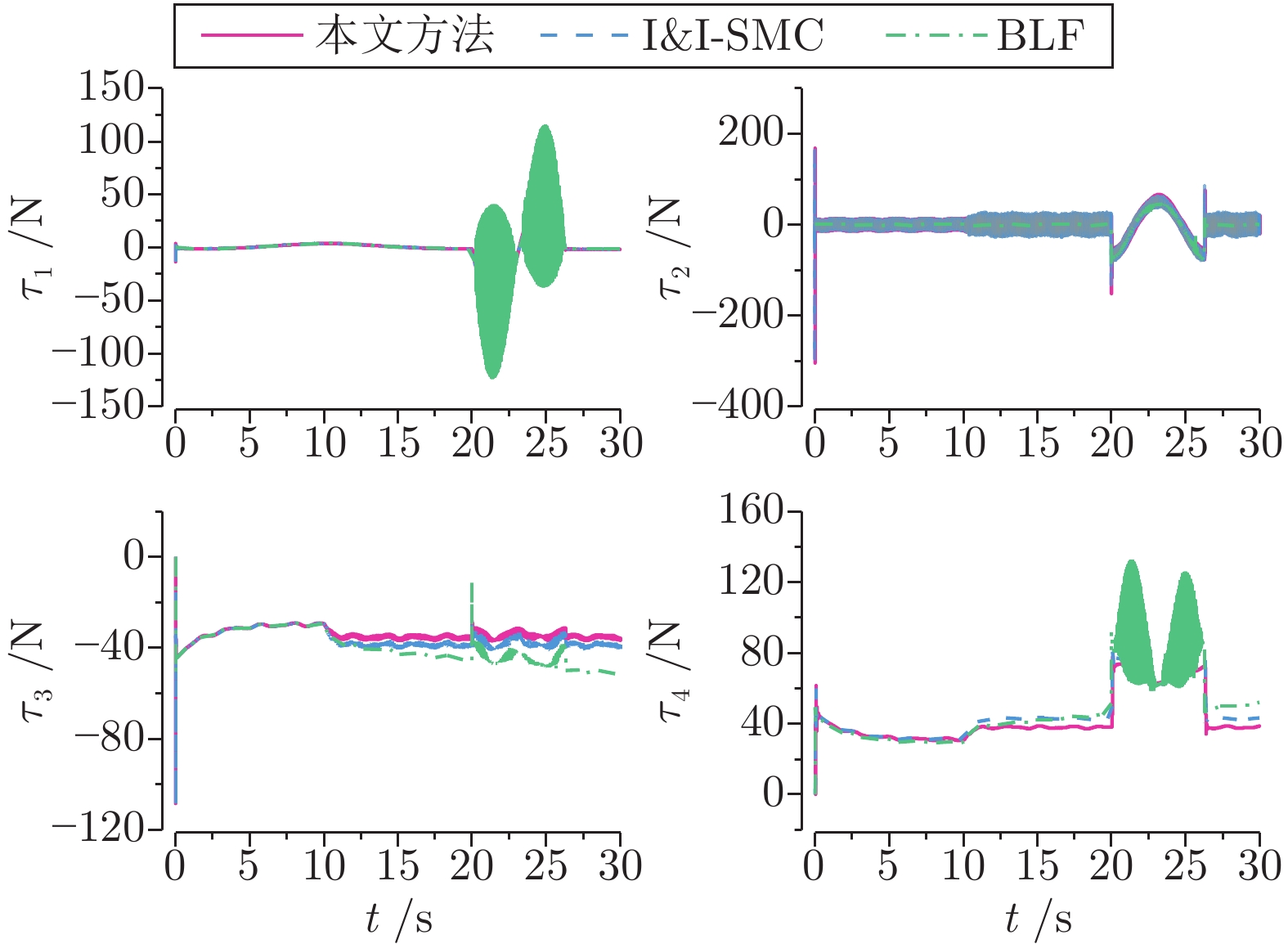
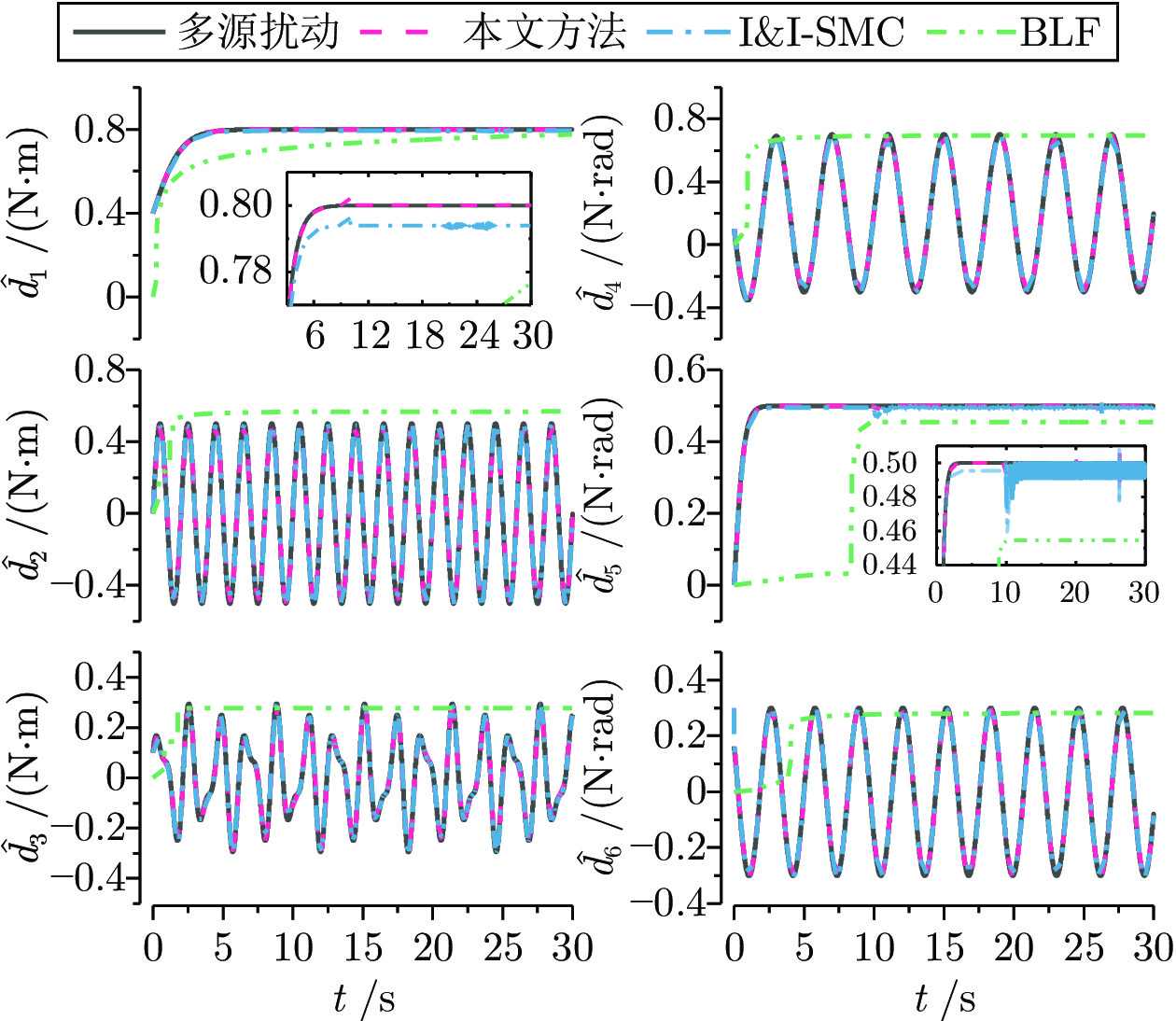
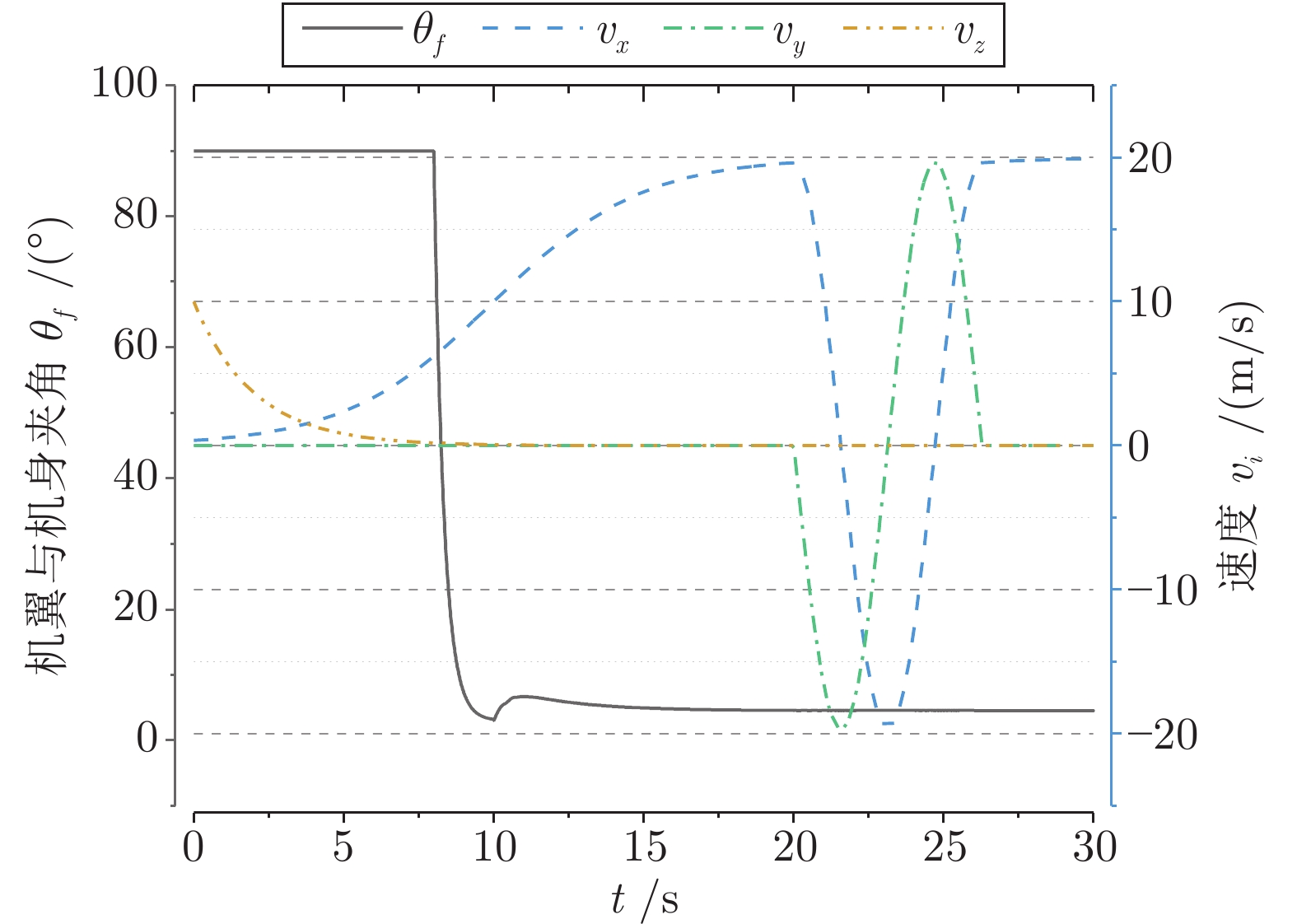
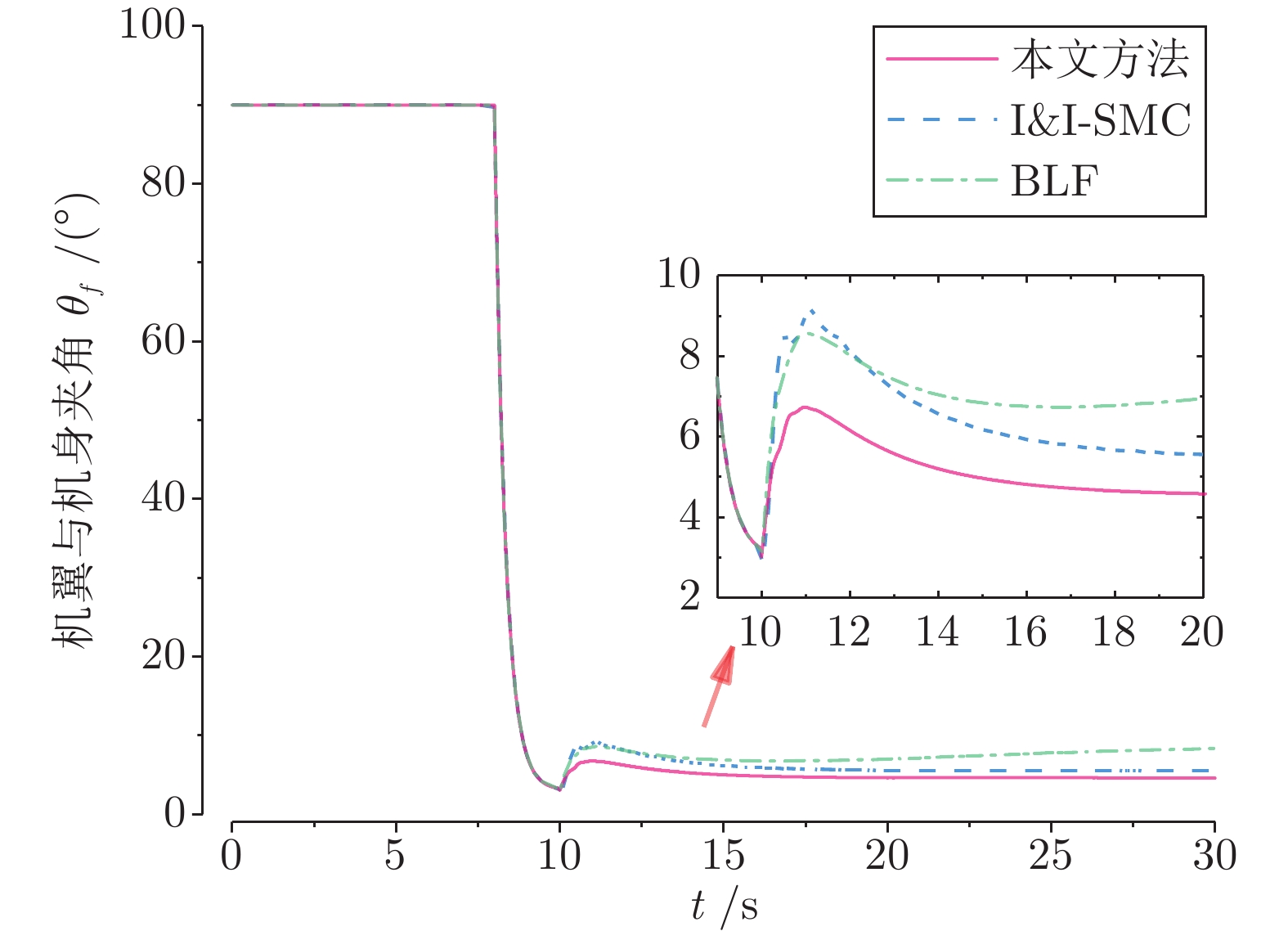
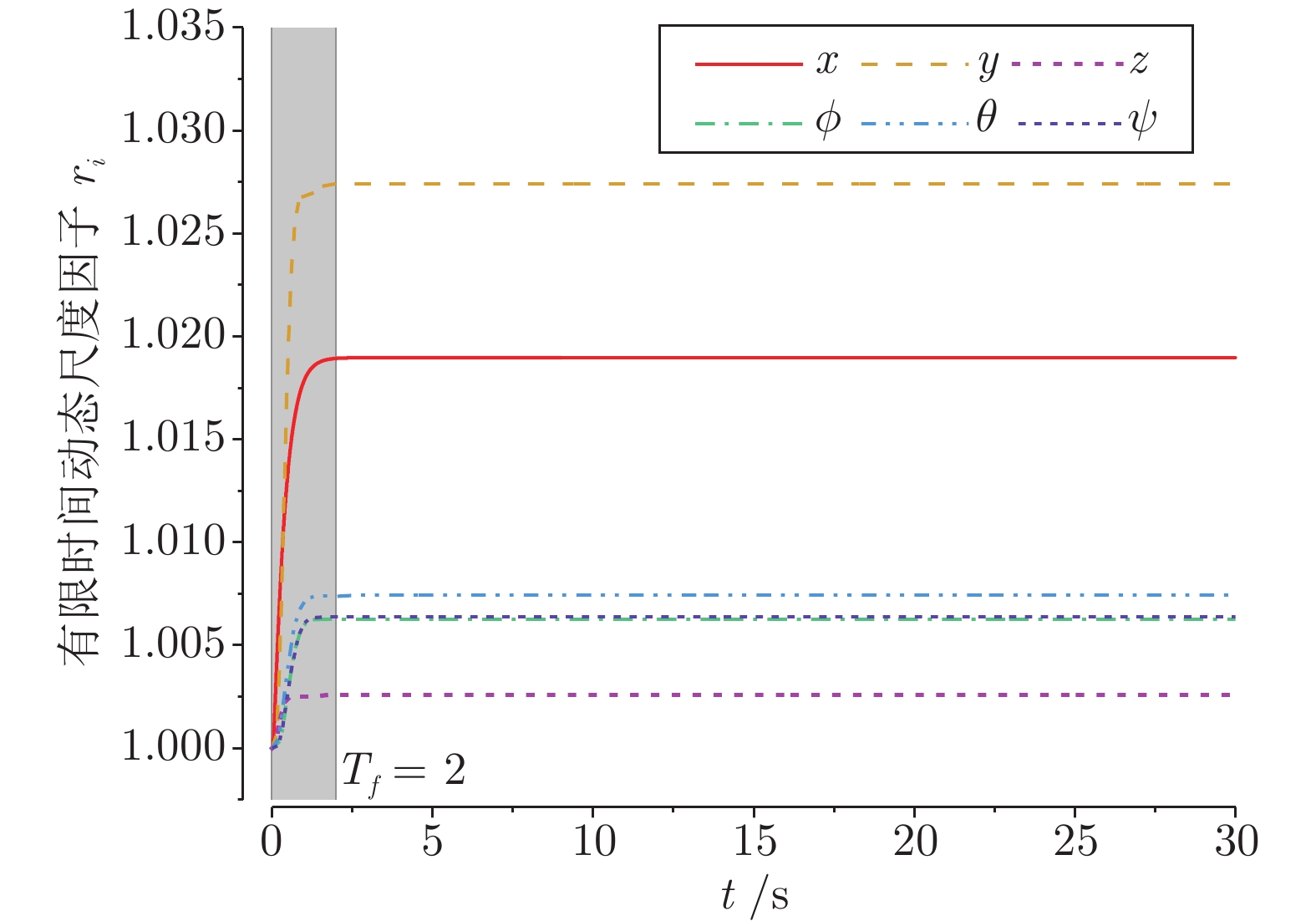
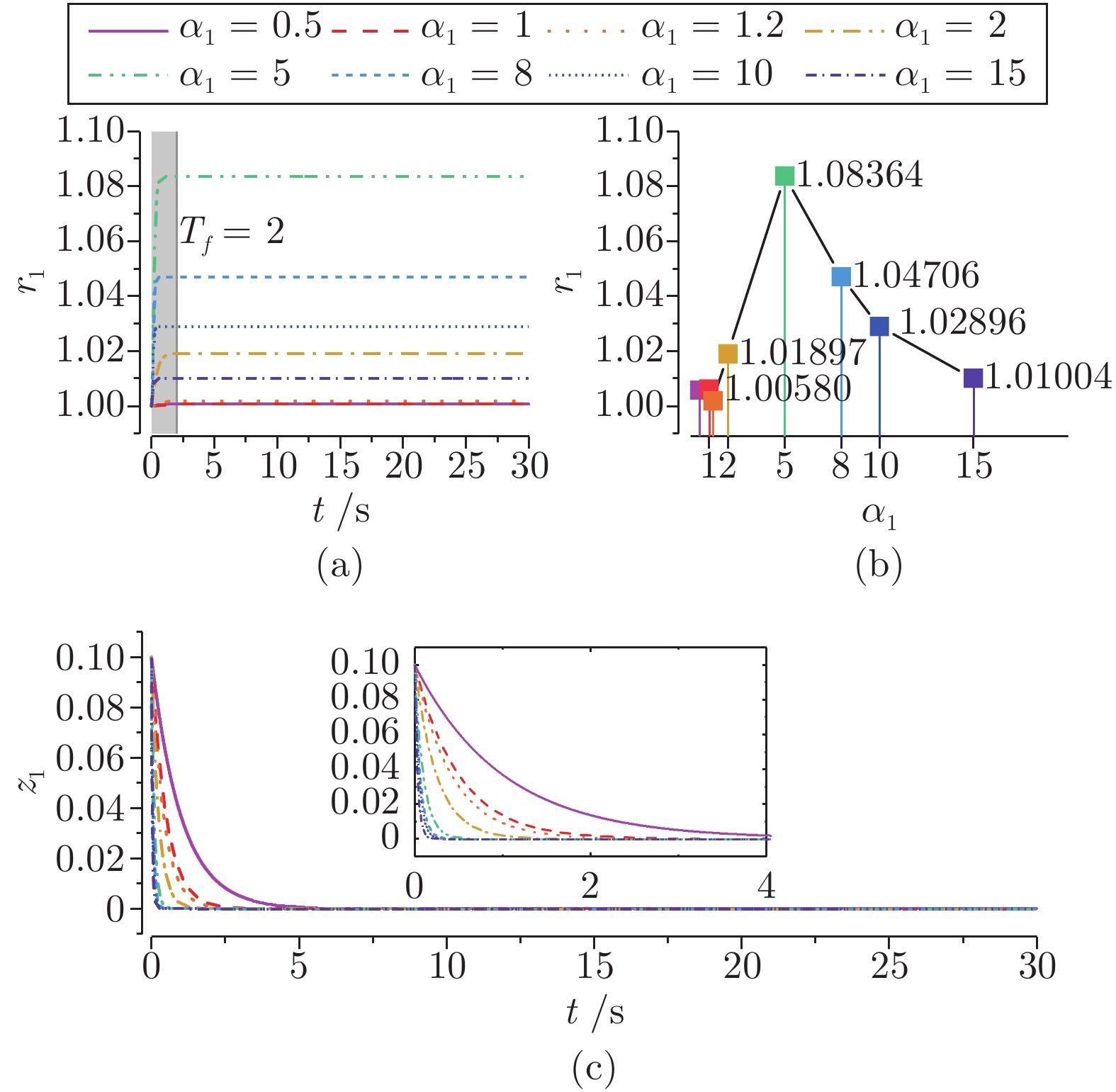
针对复杂扰动下可执行多种任务的复合式变体无人机, 提出了一种基于浸入与不变(Immersion and invariance, I&I)理论和隐含系统状态受限条件的复合时变障碍Lyapunov函数(Composite time-varying barrierLyapunov function, CTV-BLF)的控制方案. 设计了一种基于浸入与不变理论的扰动观测器, 构建了一种基于监督因子的有限时间动态尺度因子(Finite-time dynamic scaling factor, FT-DSF)调节器. 在此基础上, 设计了一种基于复合时变障碍Lyapunov函数和动态滑模面的控制器, 保证系统状态始终在约束条件之内. 通过衍生定理证明轨迹跟踪误差是有限时间稳定的. 最终仿真结果验证了所提方案的有效性.
针对复杂扰动下可执行多种任务的复合式变体无人机, 提出了一种基于浸入与不变(Immersion and invariance, I&I)理论和隐含系统状态受限条件的复合时变障碍Lyapunov函数(Composite time-varying barrierLyapunov function, CTV-BLF)的控制方案. 设计了一种基于浸入与不变理论的扰动观测器, 构建了一种基于监督因子的有限时间动态尺度因子(Finite-time dynamic scaling factor, FT-DSF)调节器. 在此基础上, 设计了一种基于复合时变障碍Lyapunov函数和动态滑模面的控制器, 保证系统状态始终在约束条件之内. 通过衍生定理证明轨迹跟踪误差是有限时间稳定的. 最终仿真结果验证了所提方案的有效性.



2022, 48(8): 2075-2087.
doi: 10.16383/j.aas.c200723
摘要:
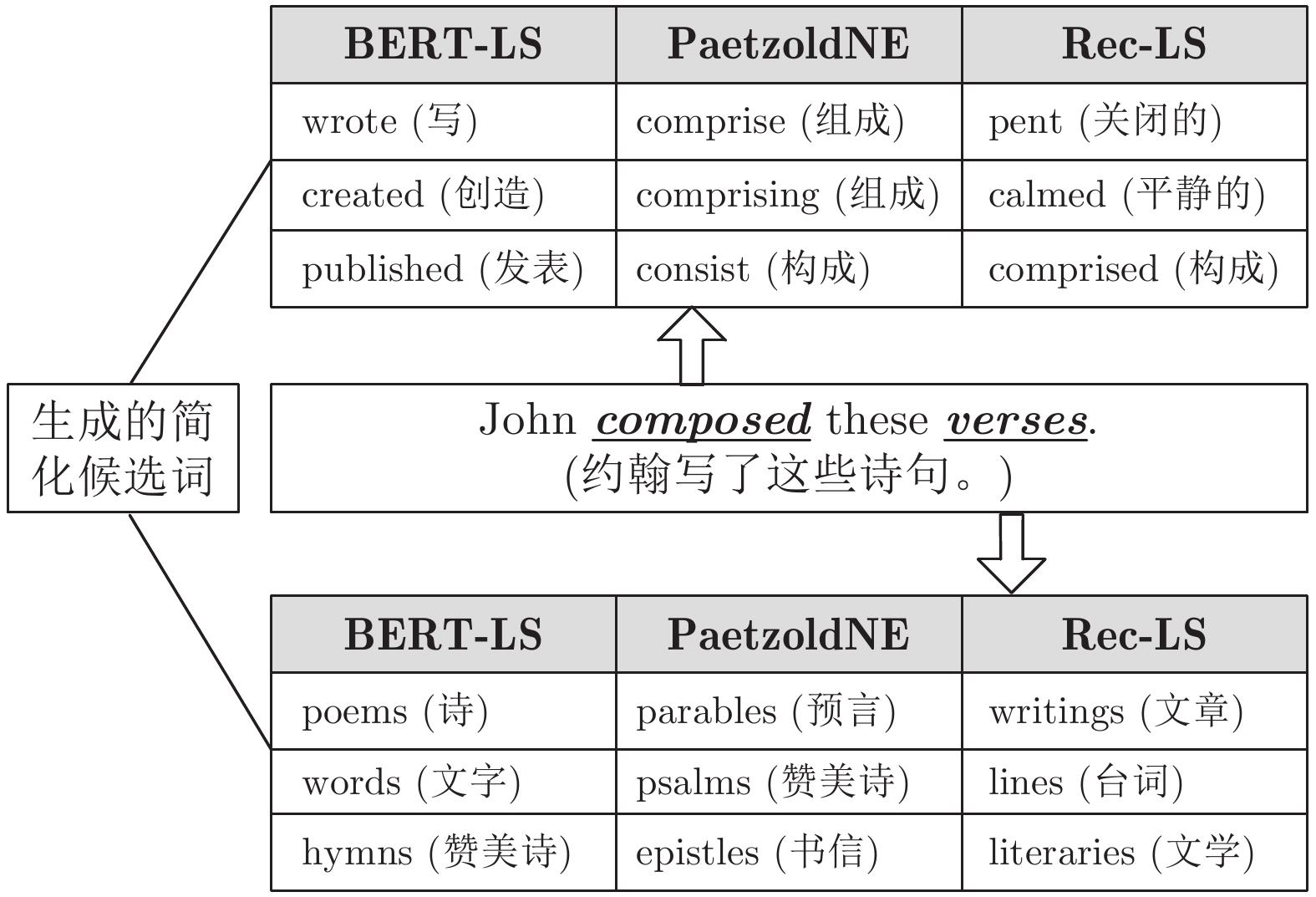
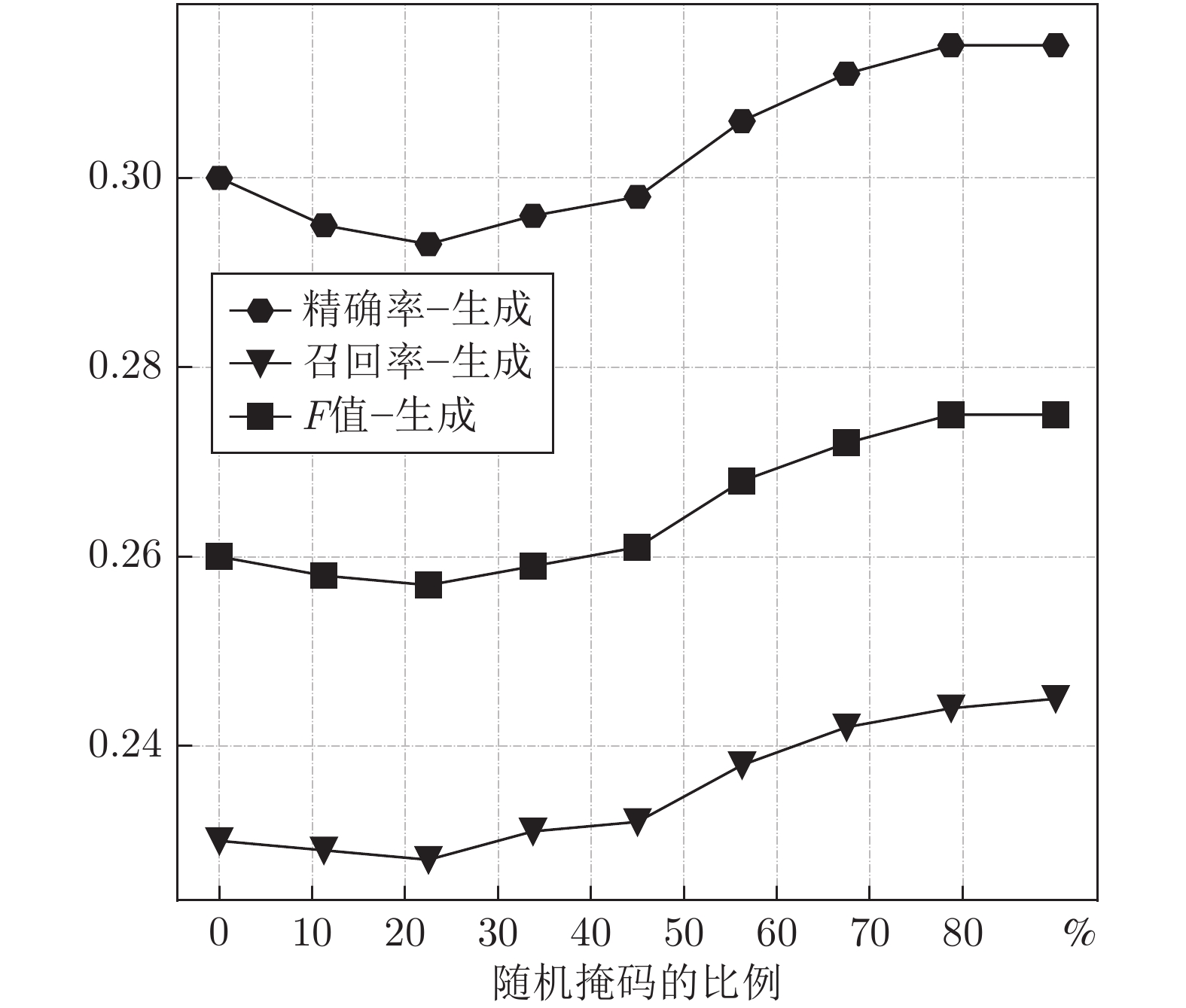
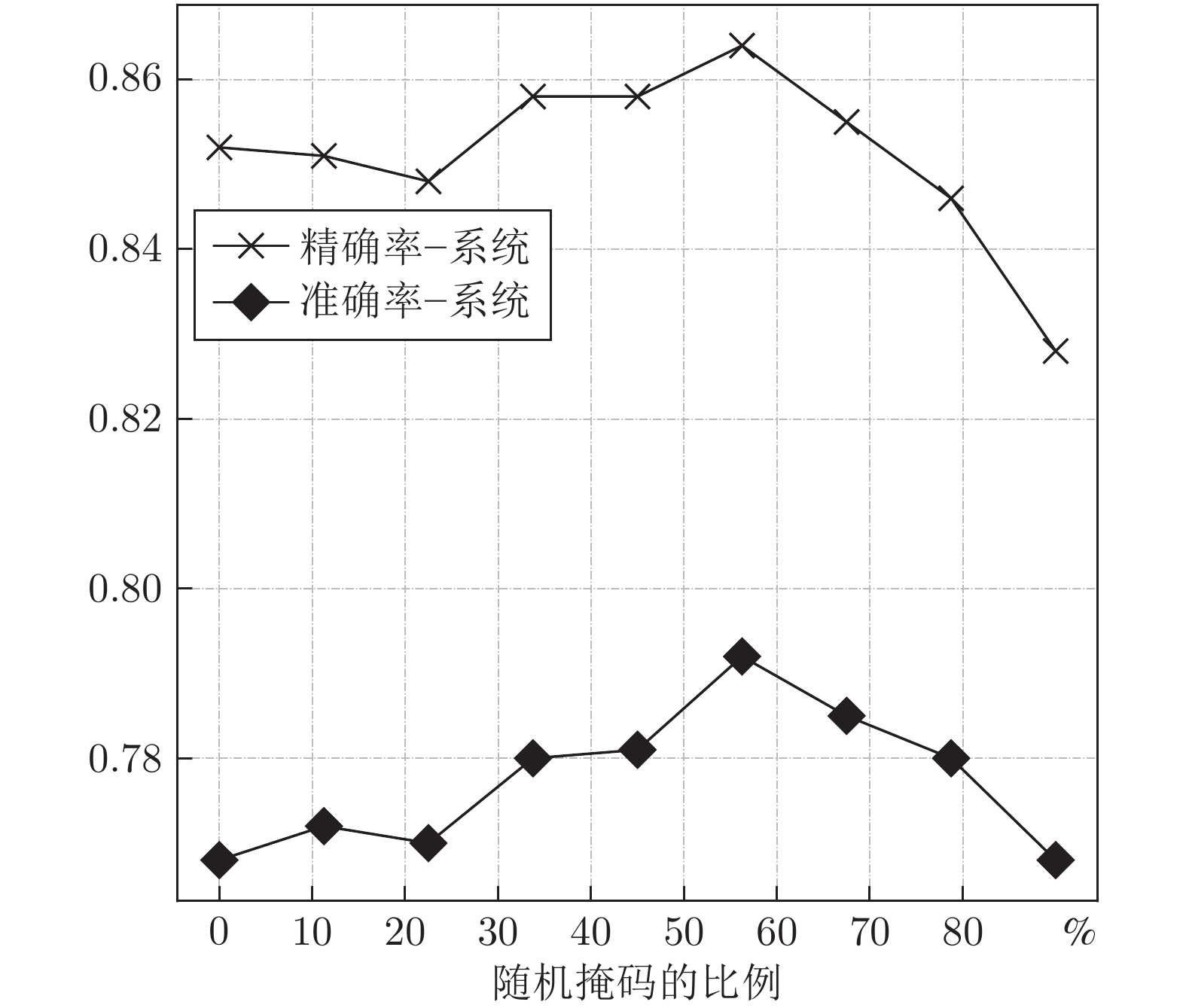
词语简化是将给定句子中的复杂词替换成意义相等的简单替代词,从而达到简化句子的目的. 已有的词语简化方法只依靠复杂词本身而不考虑其上下文信息来生成候选替换词, 这将不可避免地产生大量的虚假候选词. 为此, 提出了一种基于预语言训练表示模型的词语简化方法, 利用预训练语言表示模进行候选替换词的生成和排序. 基于预语言训练表示模型的词语简化方法在候选词生成过程中, 不仅不需要任何语义词典和平行语料, 而且能够充分考虑复杂词本身和上下文信息产生候选替代词. 在候选替代词排序过程中, 基于预语言训练表示模型的词语简化方法采用了5个高效的特征, 除了常用的词频和词语之间相似度特征之外, 还利用了预训练语言表示模的预测排名、基于基于预语言训练表示模型的上、下文产生概率和复述数据库PPDB三个新特征. 通过3个基准数据集进行验证, 基于预语言训练表示模型的词语简化方法取得了明显的进步, 整体性能平均比最先进的方法准确率高出29.8%.
词语简化是将给定句子中的复杂词替换成意义相等的简单替代词,从而达到简化句子的目的. 已有的词语简化方法只依靠复杂词本身而不考虑其上下文信息来生成候选替换词, 这将不可避免地产生大量的虚假候选词. 为此, 提出了一种基于预语言训练表示模型的词语简化方法, 利用预训练语言表示模进行候选替换词的生成和排序. 基于预语言训练表示模型的词语简化方法在候选词生成过程中, 不仅不需要任何语义词典和平行语料, 而且能够充分考虑复杂词本身和上下文信息产生候选替代词. 在候选替代词排序过程中, 基于预语言训练表示模型的词语简化方法采用了5个高效的特征, 除了常用的词频和词语之间相似度特征之外, 还利用了预训练语言表示模的预测排名、基于基于预语言训练表示模型的上、下文产生概率和复述数据库PPDB三个新特征. 通过3个基准数据集进行验证, 基于预语言训练表示模型的词语简化方法取得了明显的进步, 整体性能平均比最先进的方法准确率高出29.8%.


2022, 48(8): 2088-2096.
doi: 10.16383/j.aas.c190869
摘要:
为了提高半监督深层生成模型的分类性能, 提出一种基于梯形网络和改进三训练法的半监督分类模型. 该模型在梯形网络框架有噪编码器的最高层添加3个分类器, 结合改进的三训练法提高图像分类性能. 首先, 用基于类别抽样的方法将有标记数据分为3份, 模型以有标记数据的标签误差和未标记数据的重构误差相结合的方式调整参数, 训练得到3个Large-margin Softmax分类器; 接着, 用改进的三训练法对未标记数据添加伪标签, 并对新的标记数据分配不同权重, 扩充训练集; 最后, 利用扩充的训练集更新模型. 训练完成后, 对分类器进行加权投票, 得到分类结果. 模型得到的梯形网络的特征有更好的低维流形表示, 可以有效地避免因为样本数据分布不均而导致的分类误差, 增强泛化能力. 模型分别在MNIST数据库, SVHN数据库和CIFAR10数据库上进行实验, 并且与其他半监督深层生成模型进行了比较, 结果表明本文所提出的模型得到了更高的分类精度.
为了提高半监督深层生成模型的分类性能, 提出一种基于梯形网络和改进三训练法的半监督分类模型. 该模型在梯形网络框架有噪编码器的最高层添加3个分类器, 结合改进的三训练法提高图像分类性能. 首先, 用基于类别抽样的方法将有标记数据分为3份, 模型以有标记数据的标签误差和未标记数据的重构误差相结合的方式调整参数, 训练得到3个Large-margin Softmax分类器; 接着, 用改进的三训练法对未标记数据添加伪标签, 并对新的标记数据分配不同权重, 扩充训练集; 最后, 利用扩充的训练集更新模型. 训练完成后, 对分类器进行加权投票, 得到分类结果. 模型得到的梯形网络的特征有更好的低维流形表示, 可以有效地避免因为样本数据分布不均而导致的分类误差, 增强泛化能力. 模型分别在MNIST数据库, SVHN数据库和CIFAR10数据库上进行实验, 并且与其他半监督深层生成模型进行了比较, 结果表明本文所提出的模型得到了更高的分类精度.


2022, 48(8): 2097-2107.
doi: 10.16383/j.aas.c200908
摘要:
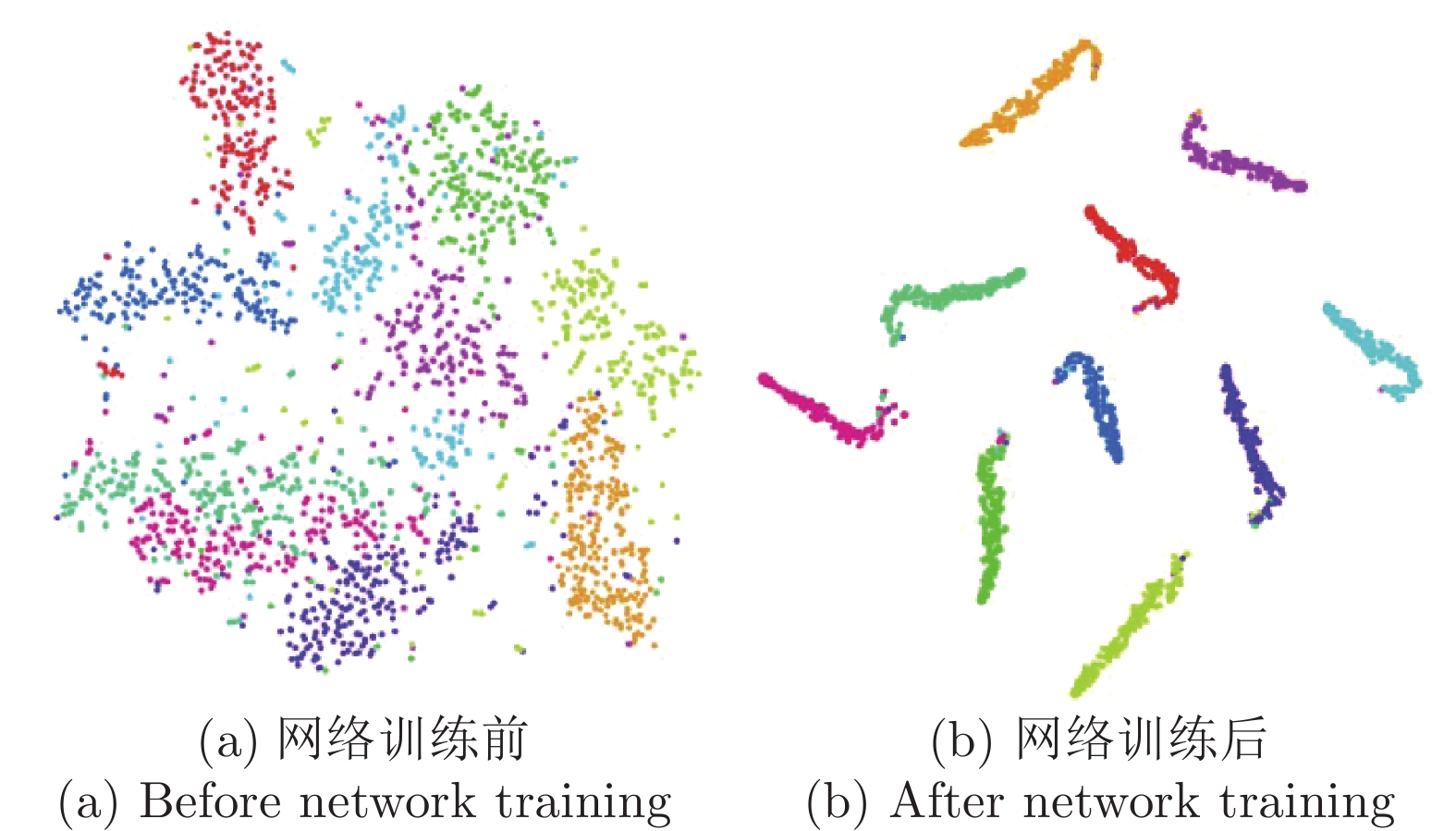
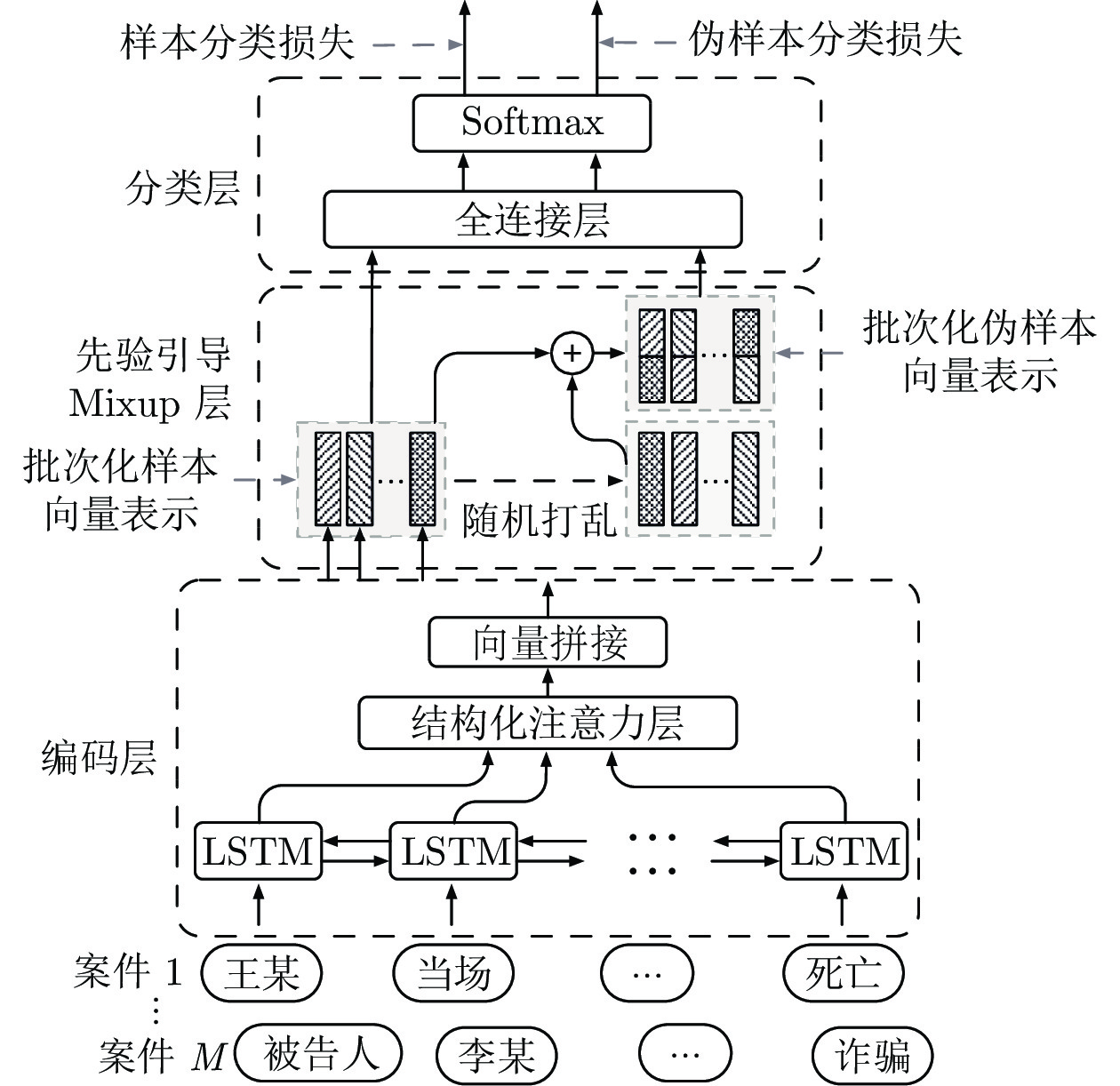
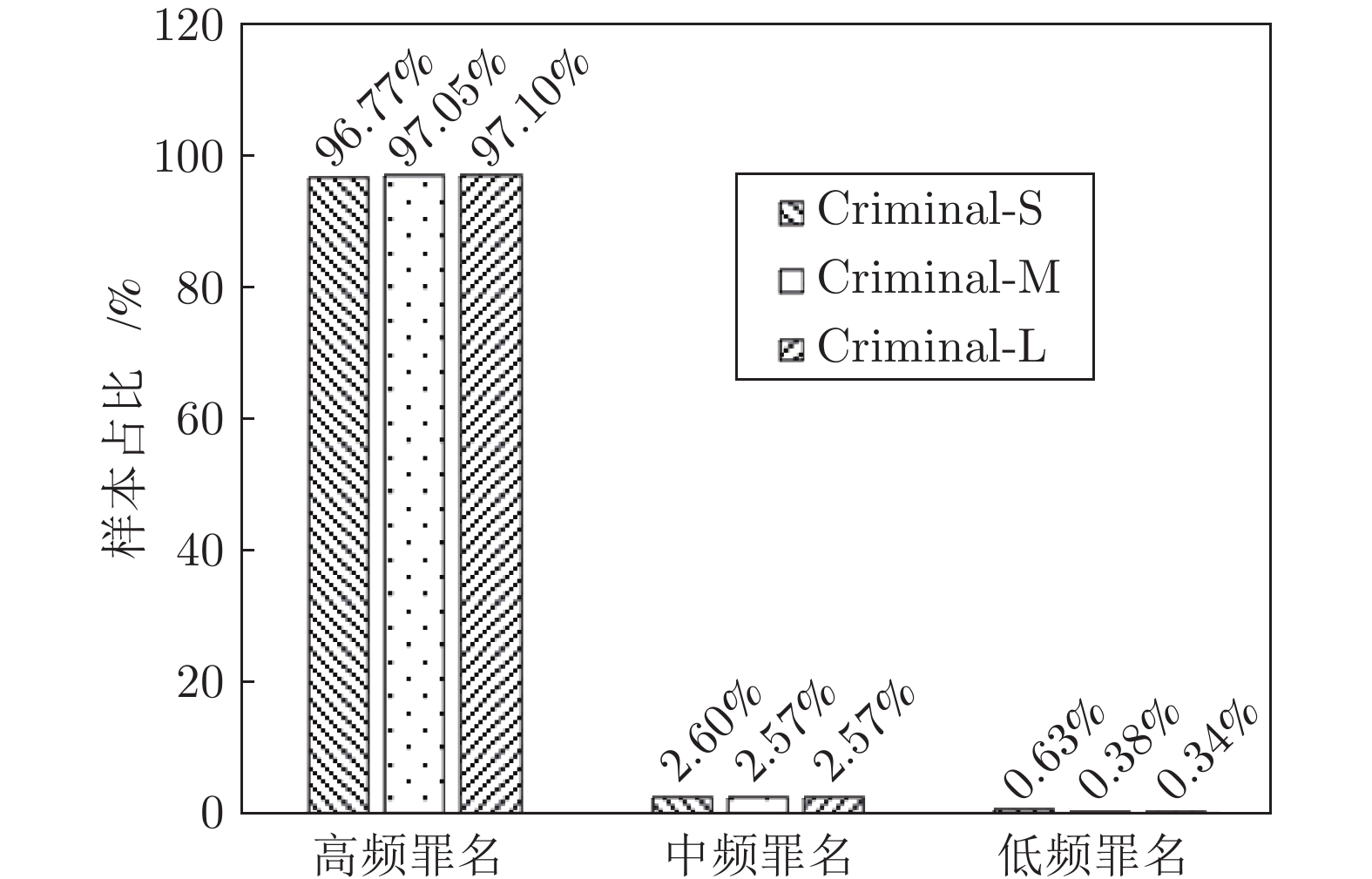
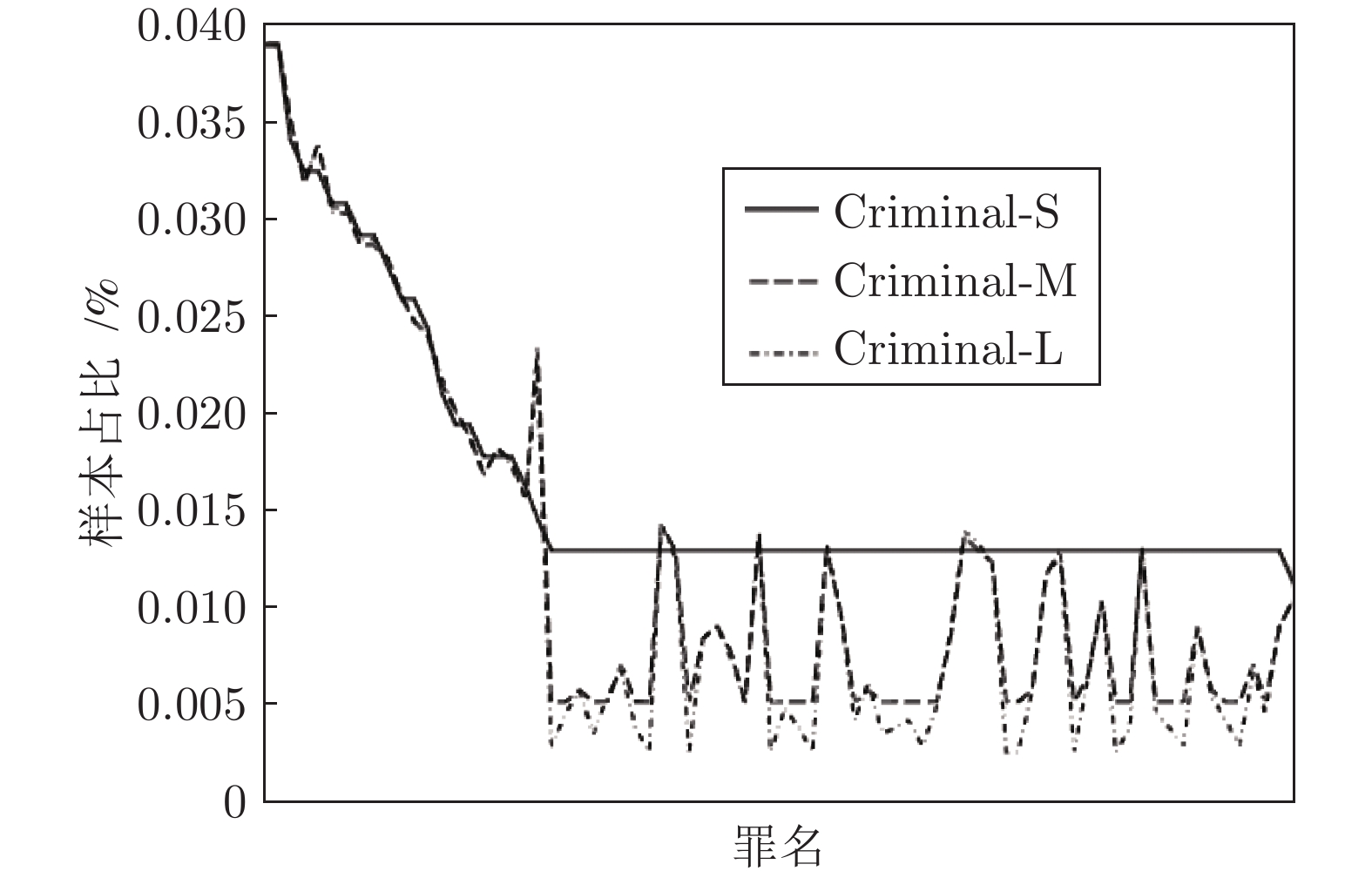
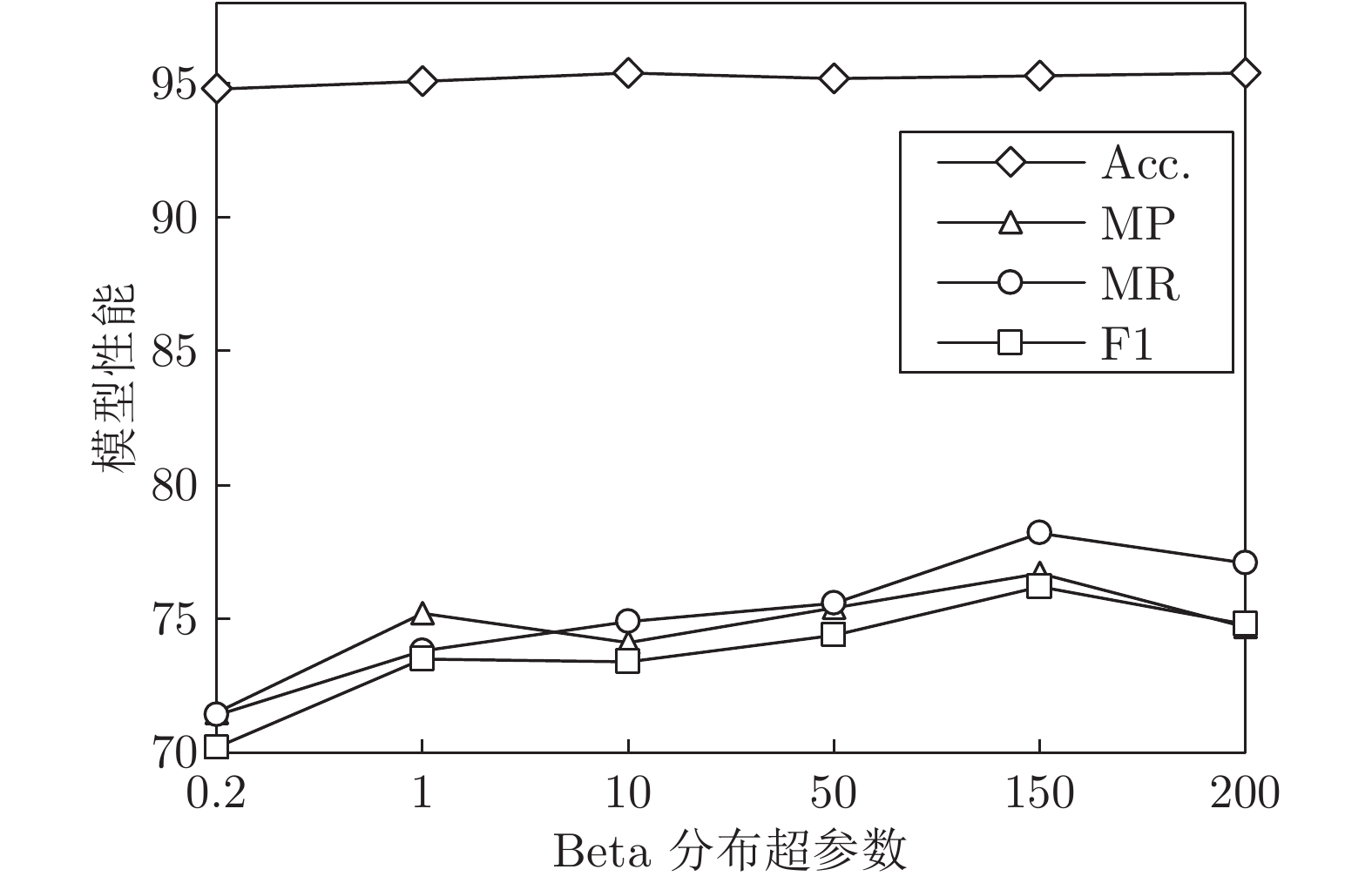
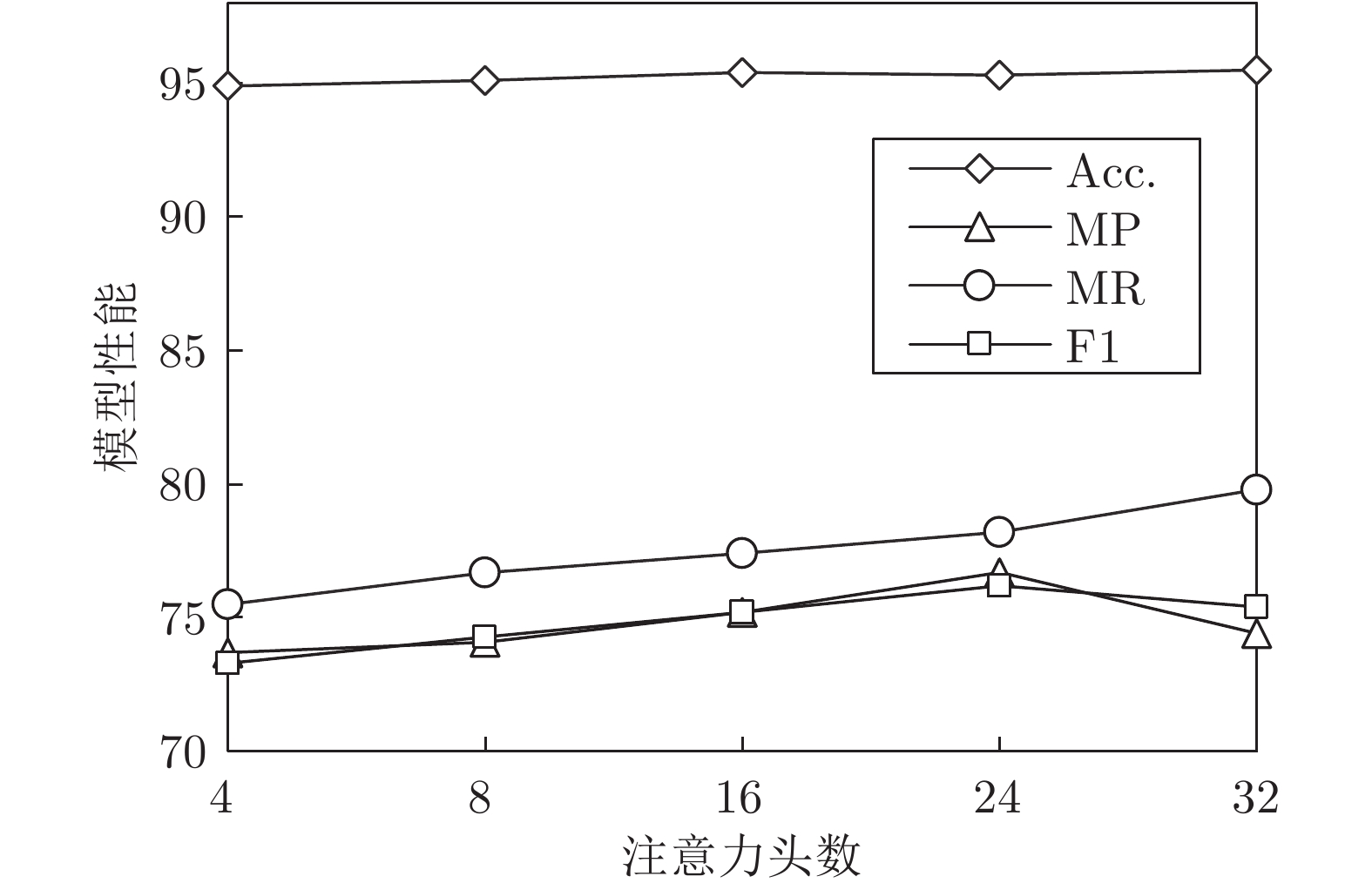
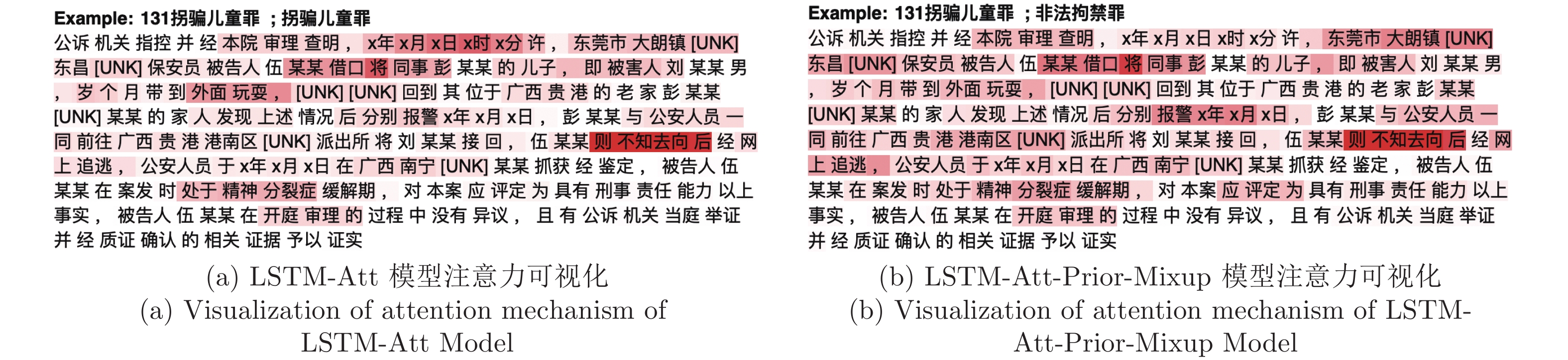
罪名预测是人工智能技术应用于司法领域的代表性任务. 该任务根据案情描述和事实预测被告人被判的罪名. 由于各类罪名样本数量高度不平衡, 分类模型训练时分类器易偏向高频罪名类别, 从而导致低频罪名预测性能不佳. 针对罪名预测类别不平衡问题, 提出融合类别先验Mixup数据增强策略的罪名预测模型, 改进低频罪名预测效果. 该模型利用双向长短期记忆网络与结构化自注意力机制学习文本向量表示, 在此基础上, 通过Mixup数据增强策略在向量表示空间中合成伪样本, 并利用类别先验使合成样本的标签偏向低频罪名类别, 以此来扩增低频罪名训练样本. 实验结果表明, 与现有方法相比, 该方法在准确率、宏精确率、宏召回率和宏F1值上都获得了大幅提升, 低频罪名预测的宏F1值提升达到13.5%.
罪名预测是人工智能技术应用于司法领域的代表性任务. 该任务根据案情描述和事实预测被告人被判的罪名. 由于各类罪名样本数量高度不平衡, 分类模型训练时分类器易偏向高频罪名类别, 从而导致低频罪名预测性能不佳. 针对罪名预测类别不平衡问题, 提出融合类别先验Mixup数据增强策略的罪名预测模型, 改进低频罪名预测效果. 该模型利用双向长短期记忆网络与结构化自注意力机制学习文本向量表示, 在此基础上, 通过Mixup数据增强策略在向量表示空间中合成伪样本, 并利用类别先验使合成样本的标签偏向低频罪名类别, 以此来扩增低频罪名训练样本. 实验结果表明, 与现有方法相比, 该方法在准确率、宏精确率、宏召回率和宏F1值上都获得了大幅提升, 低频罪名预测的宏F1值提升达到13.5%.

2022, 48(8): 2108-2118.
doi: 10.16383/j.aas.c190505
摘要:
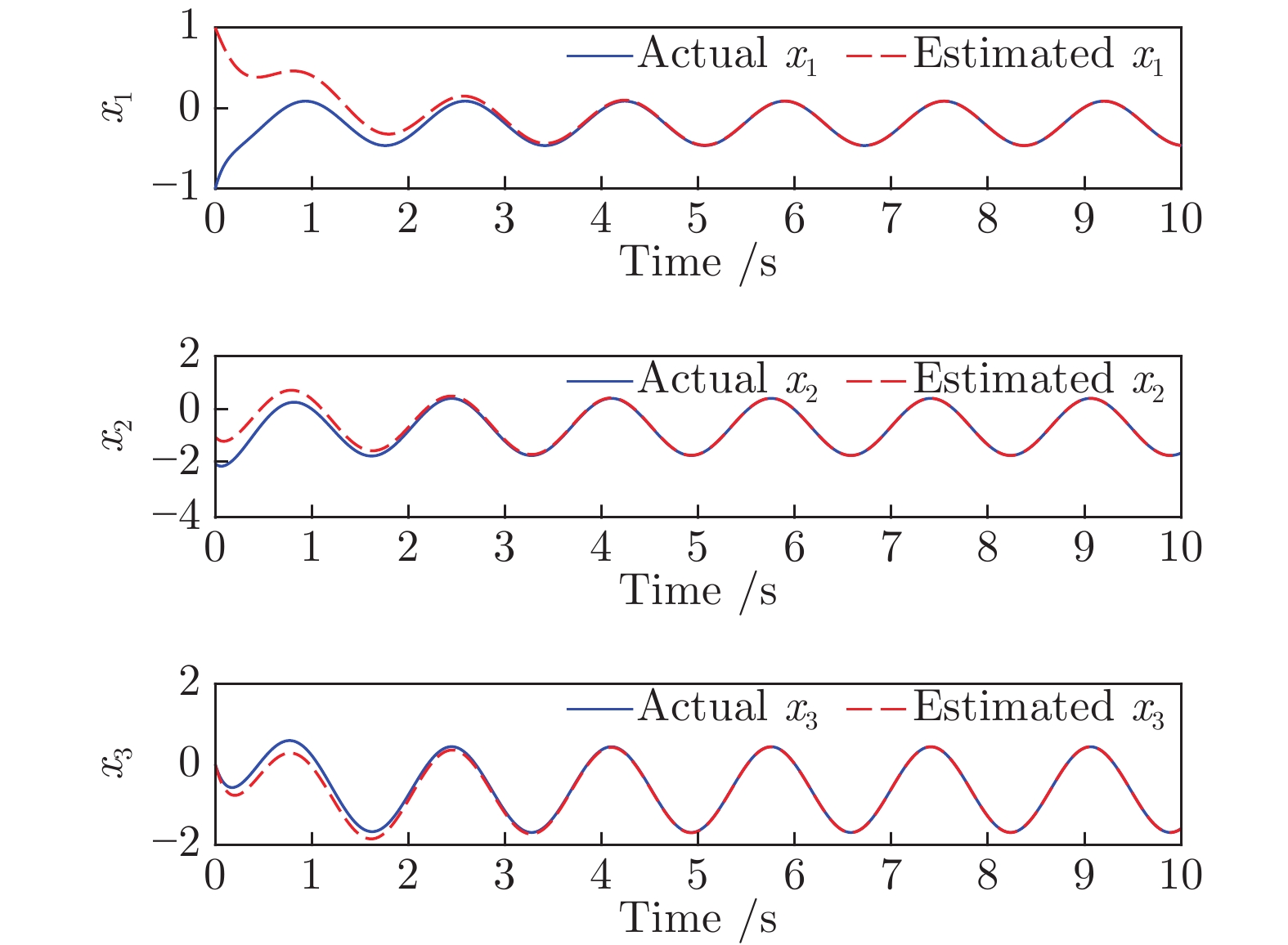
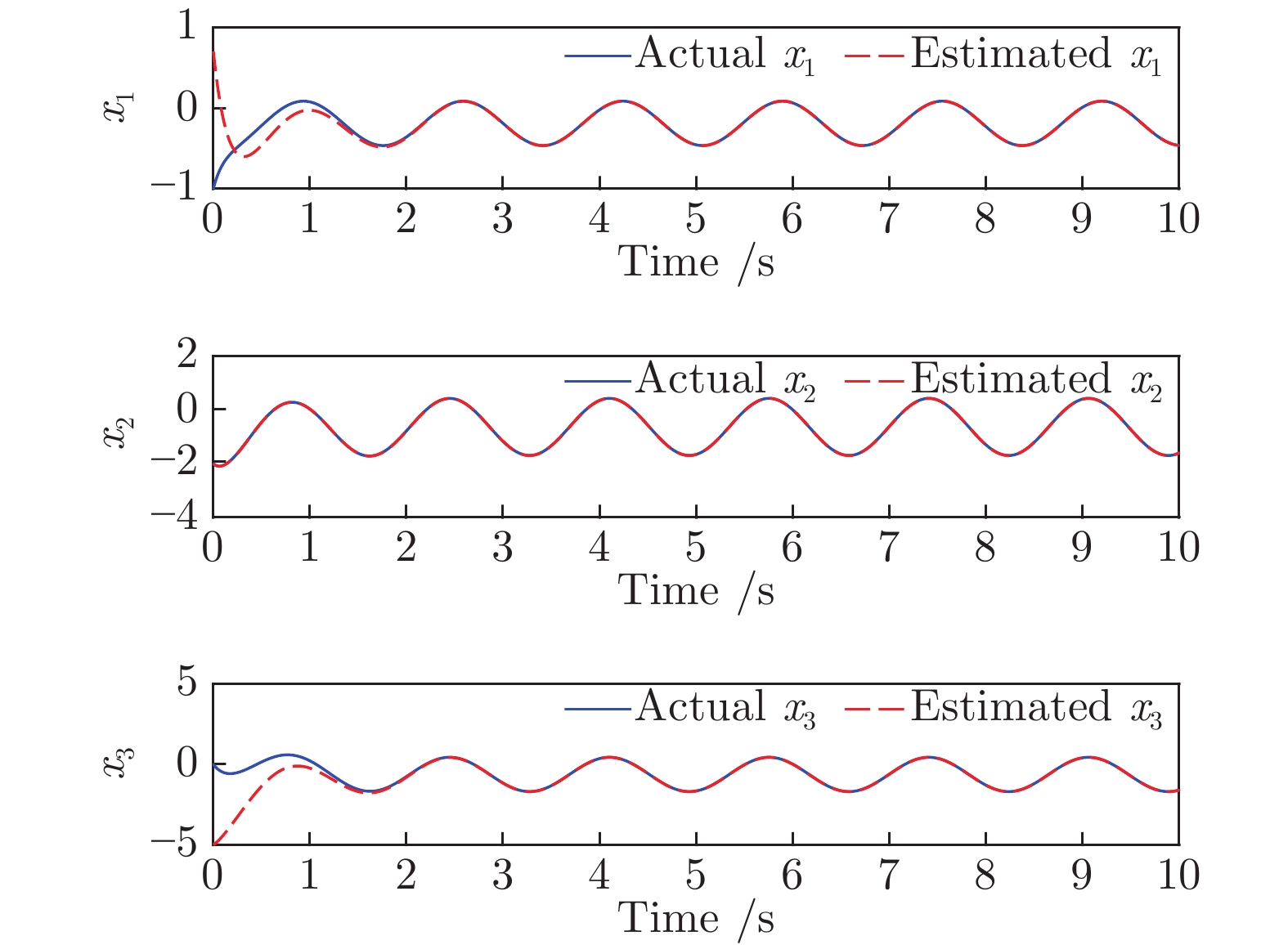
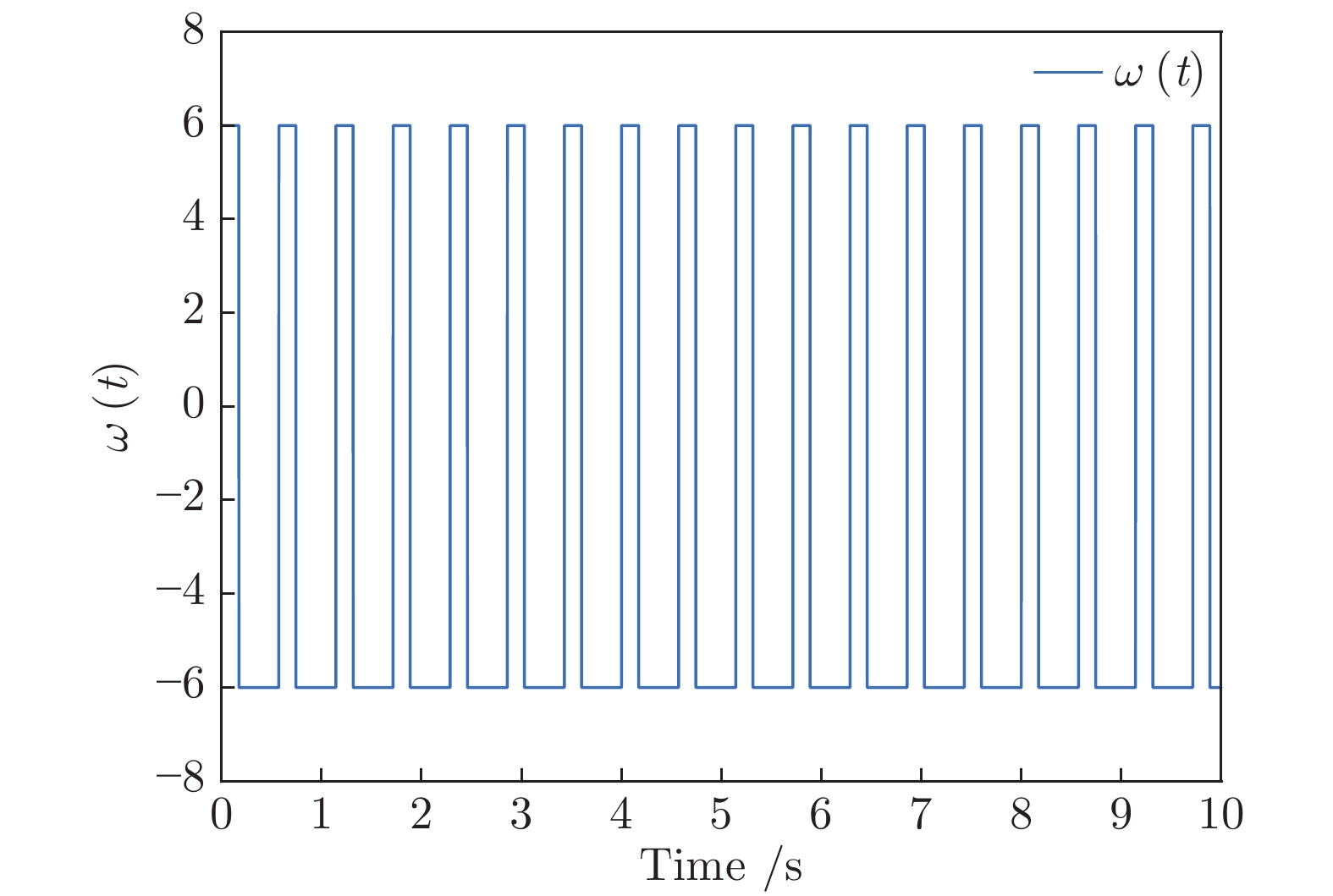
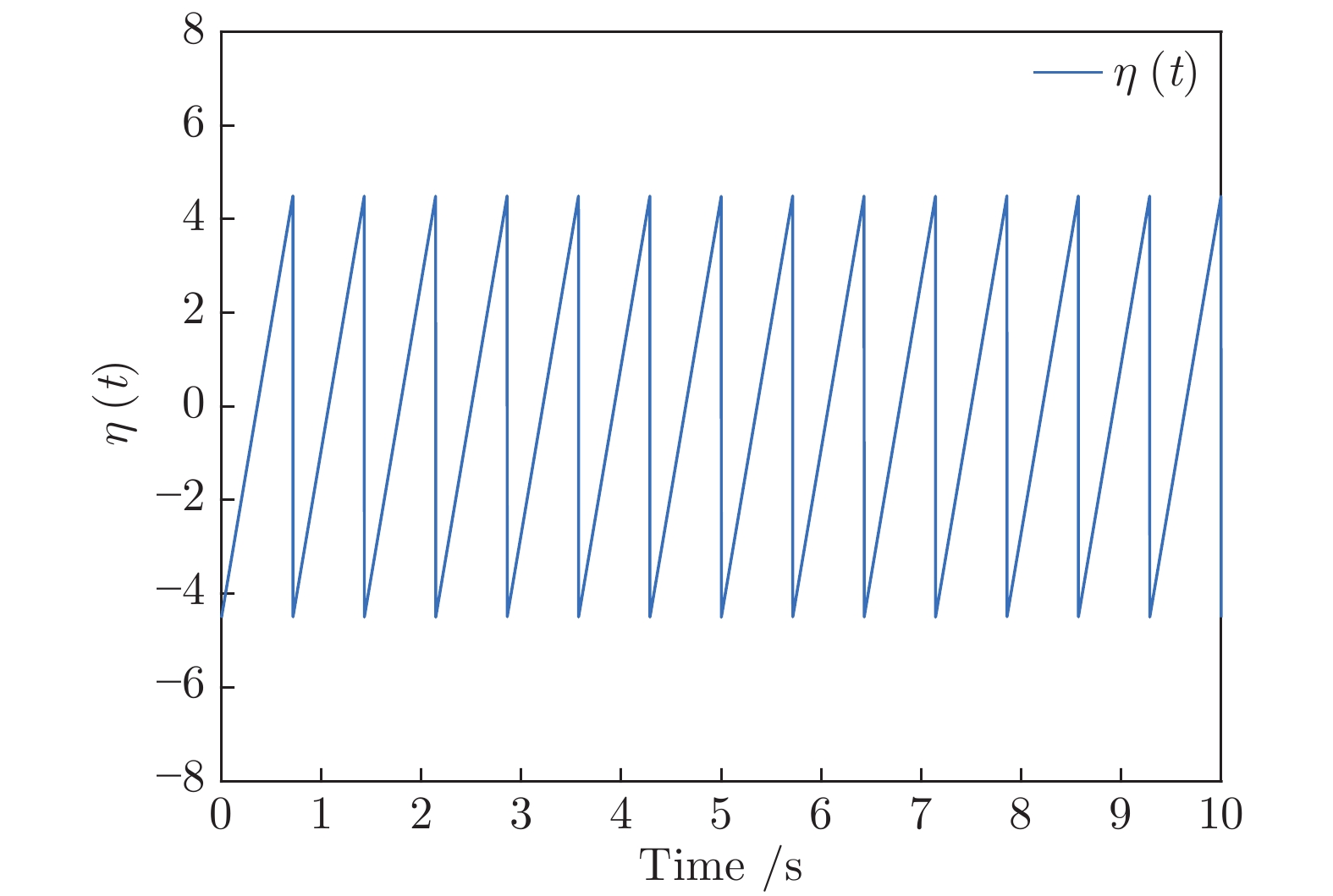
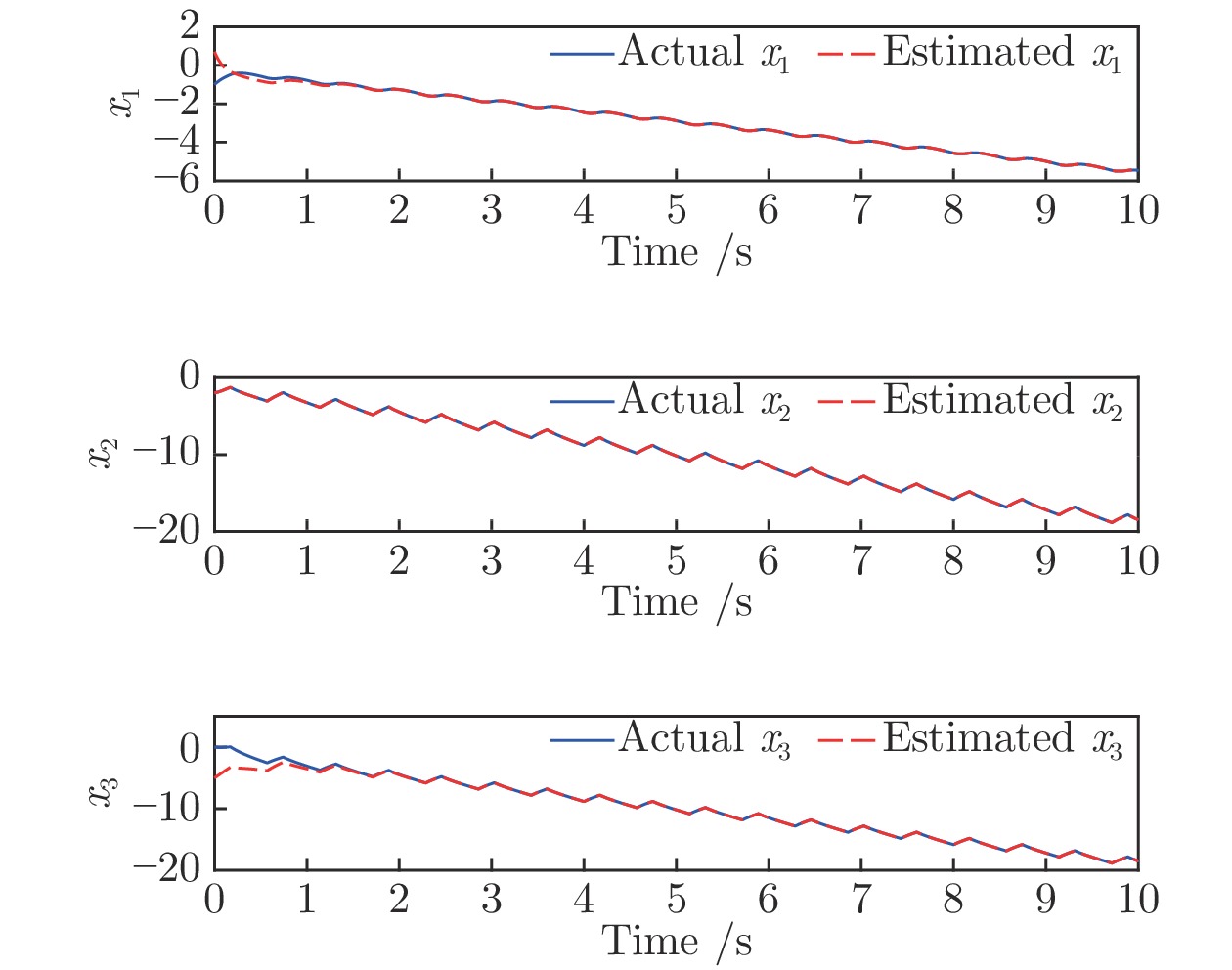
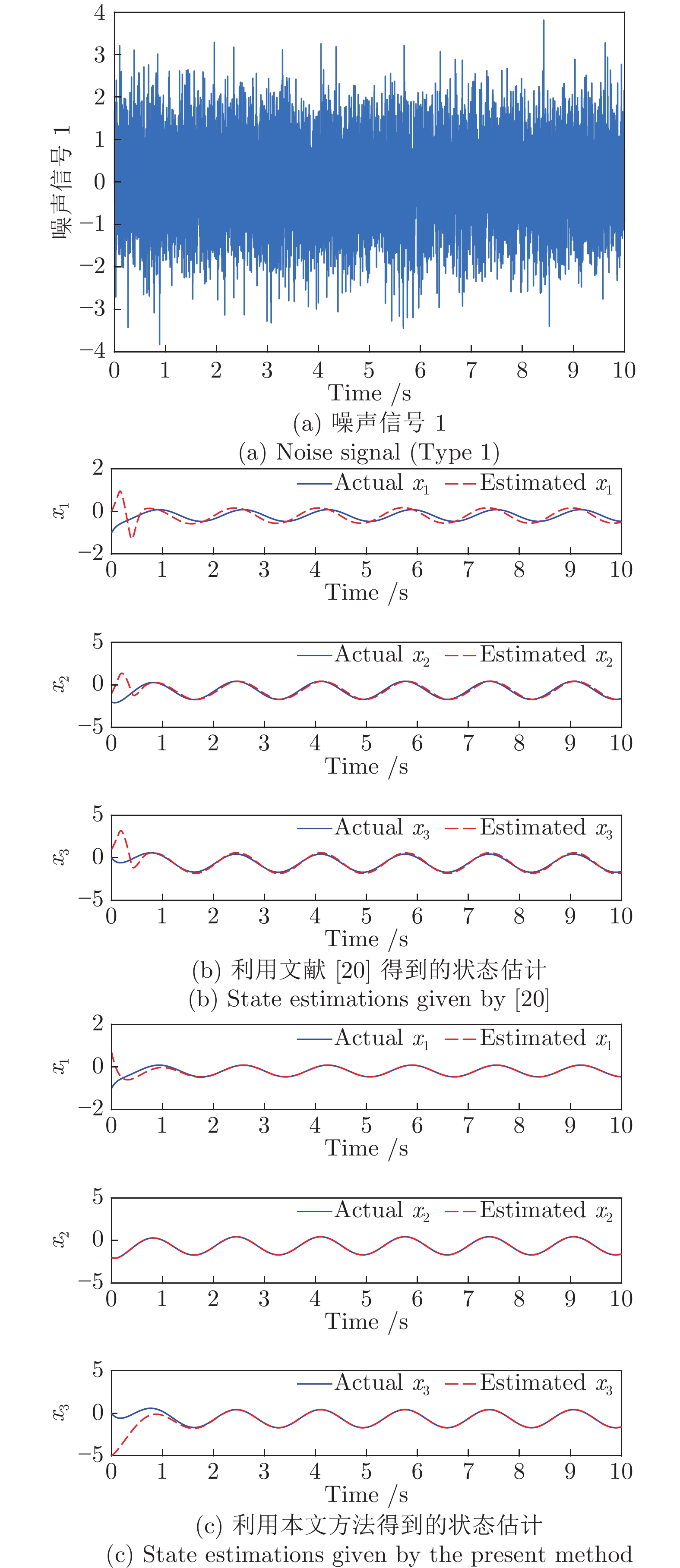
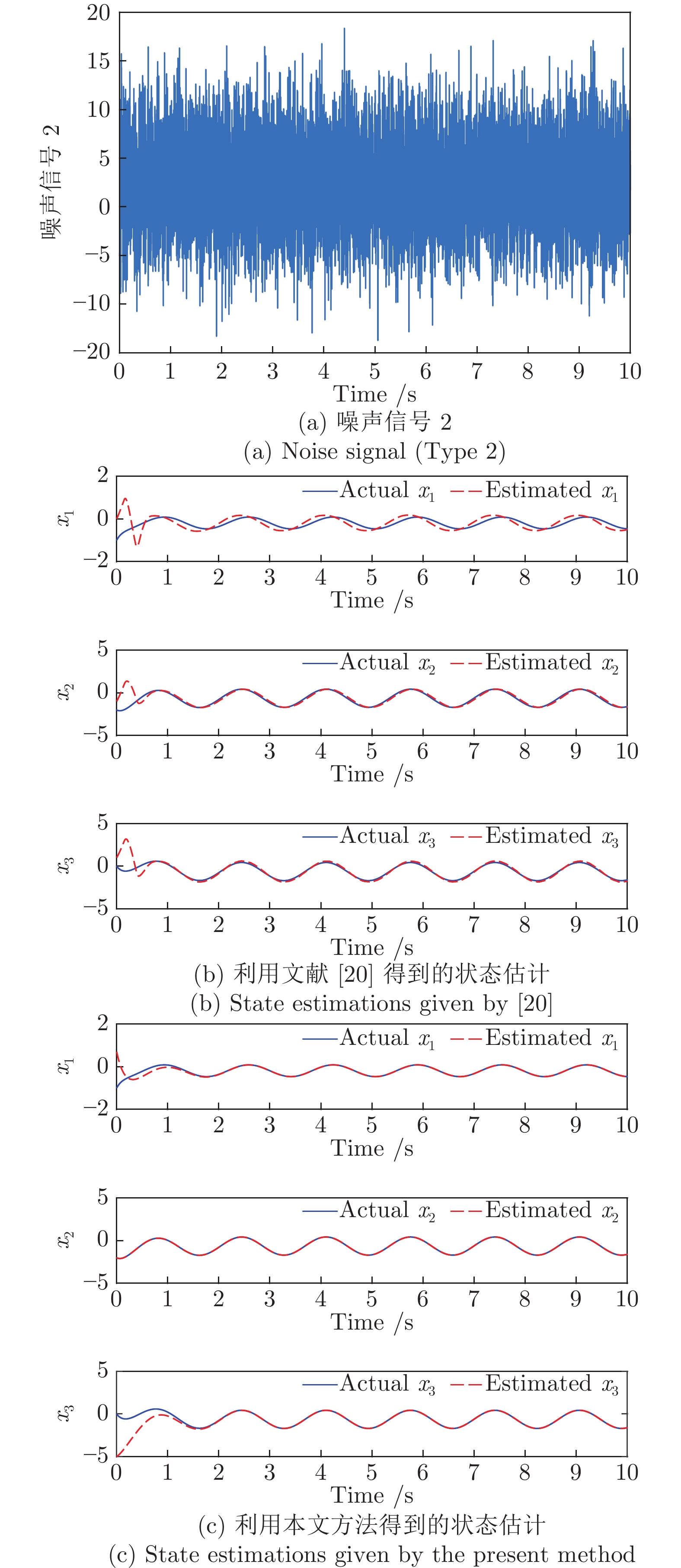
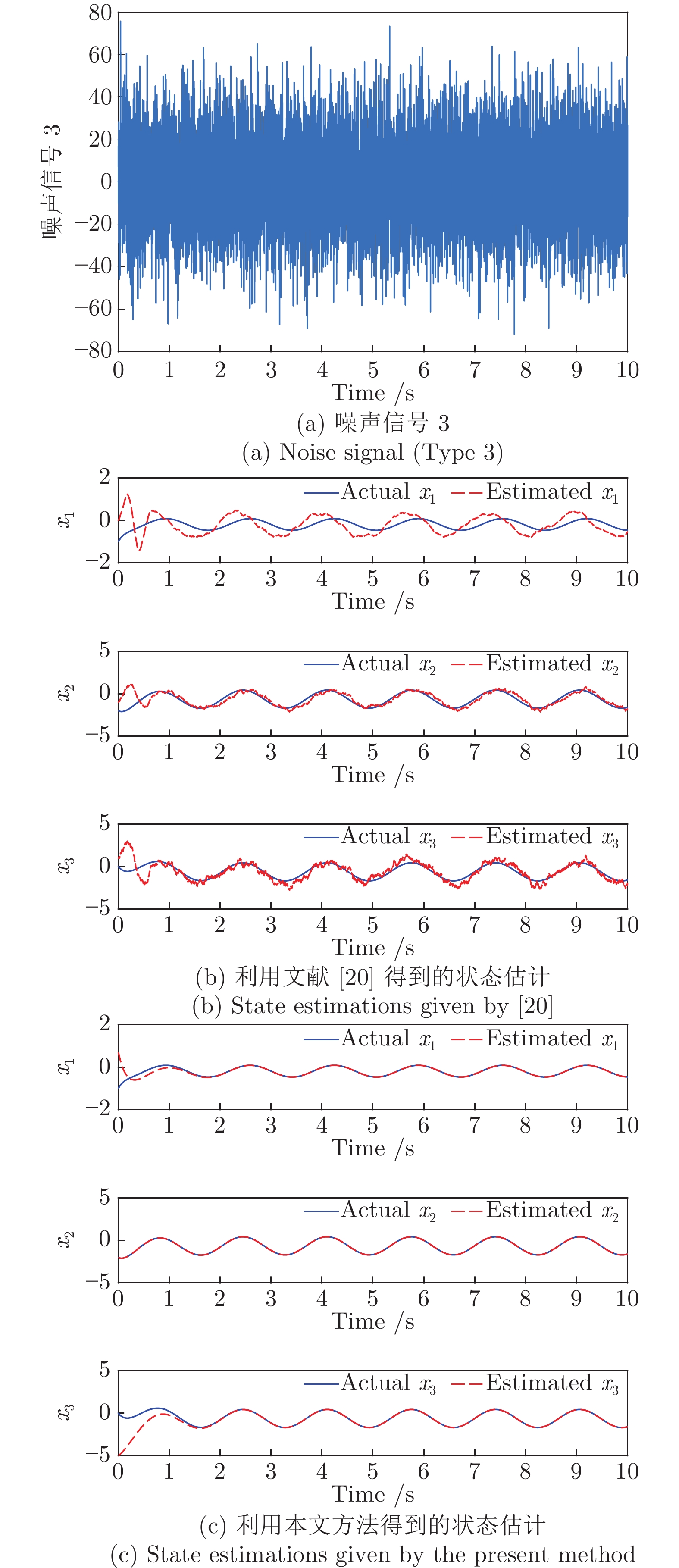
针对同时含有未知输入和测量干扰的不确定系统研究了全维和降维观测器设计问题. 首先, 利用待定系数法给出了全维观测器的结构和存在条件. 该条件完全由原系统的系统矩阵给出, 易于检验. 对于降维观测器, 为了消除测量干扰的影响, 提出了一种新的测量输出构造方法, 使得新构造的测量输出不再包含干扰信号. 此外, 证明了全维和降维观测器存在条件的内在统一性, 即全维观测器所需要满足的观测器匹配条件和强可检测条件在研究降维观测器所要讨论的新的系统中都可以得到保持. 因而, 在全维观测器存在条件下, 也可以设计一个相应的降维观测器. 最后, 给出了一个数值例子验证所提方法的有效性.
针对同时含有未知输入和测量干扰的不确定系统研究了全维和降维观测器设计问题. 首先, 利用待定系数法给出了全维观测器的结构和存在条件. 该条件完全由原系统的系统矩阵给出, 易于检验. 对于降维观测器, 为了消除测量干扰的影响, 提出了一种新的测量输出构造方法, 使得新构造的测量输出不再包含干扰信号. 此外, 证明了全维和降维观测器存在条件的内在统一性, 即全维观测器所需要满足的观测器匹配条件和强可检测条件在研究降维观测器所要讨论的新的系统中都可以得到保持. 因而, 在全维观测器存在条件下, 也可以设计一个相应的降维观测器. 最后, 给出了一个数值例子验证所提方法的有效性.