

Optimal Tracking Control Method for Discrete-time Linear Multivariable Systems With Decoupling Performance
-
摘要: 在传统线性二次跟踪控制方法的基础上, 针对一类具有强耦合特性的离散时间线性多变量系统, 提出了一种具有解耦性能的最优跟踪控制方法. 首先为实现解耦, 将耦合项作为可测干扰, 基于零和博弈思想提出了一种新的性能指标; 然后针对该性能指标, 利用极小值原理设计最优跟踪控制器, 通过适当加权矩阵的选择, 同步实现解耦和跟踪; 最后进行仿真实验, 仿真结果表明了该方法的有效性以及在最优性能等方面的优越性.Abstract: In this paper, for a class of discrete-time multivariable linear systems with strong coupling property, based on the traditional linear quadratic tracking control method, an optimal tracking controller with decoupling performance is proposed. First, in order to achieve decoupling, the coupling term is viewed as the measurable disturbance, and then a novel performance index which is inspired by the two-player Zero-Sum game problem is introduced. Based on the novel performance index, the optimal tracking controller is derived by using the minimum principle. Then, it is proved that by choosing appropriate weighting matrices, the proposed method can simultaneously decouple the closed-loop system in dynamic and make the tracking error converge asymptotically. Finally, simulations are conducted, whose results demonstrate the effectiveness of the proposed method and its superiority in optimal performance comparing with the traditional controller.
-
Key words:
- Decoupling /
- tracking control /
- discrete-time linear systems /
- multivariable systems
-
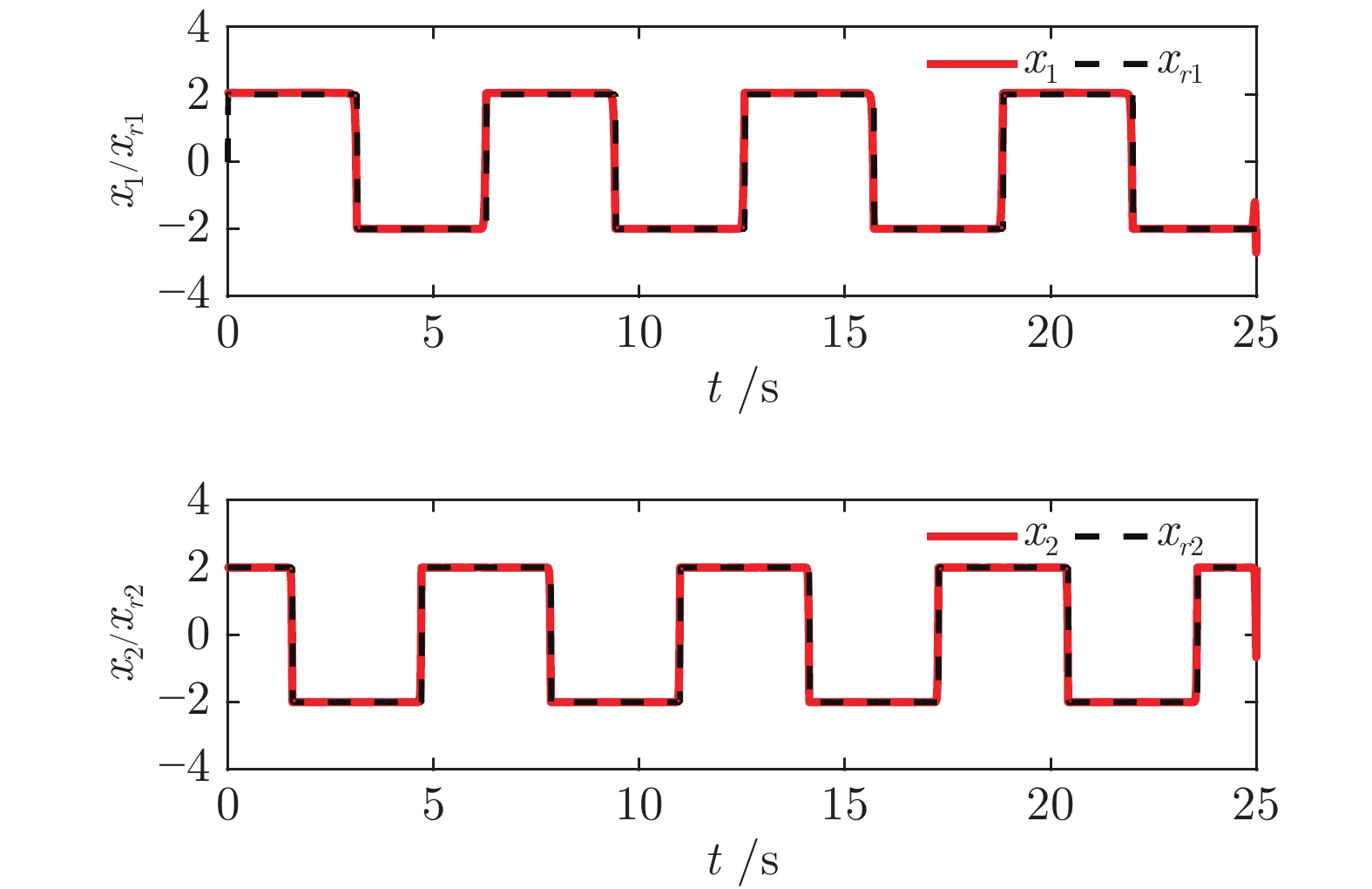
图 7 第1组参数下, 2种策略的最优性能比较
Fig. 7 Comparison of the performance under the first set of parameters
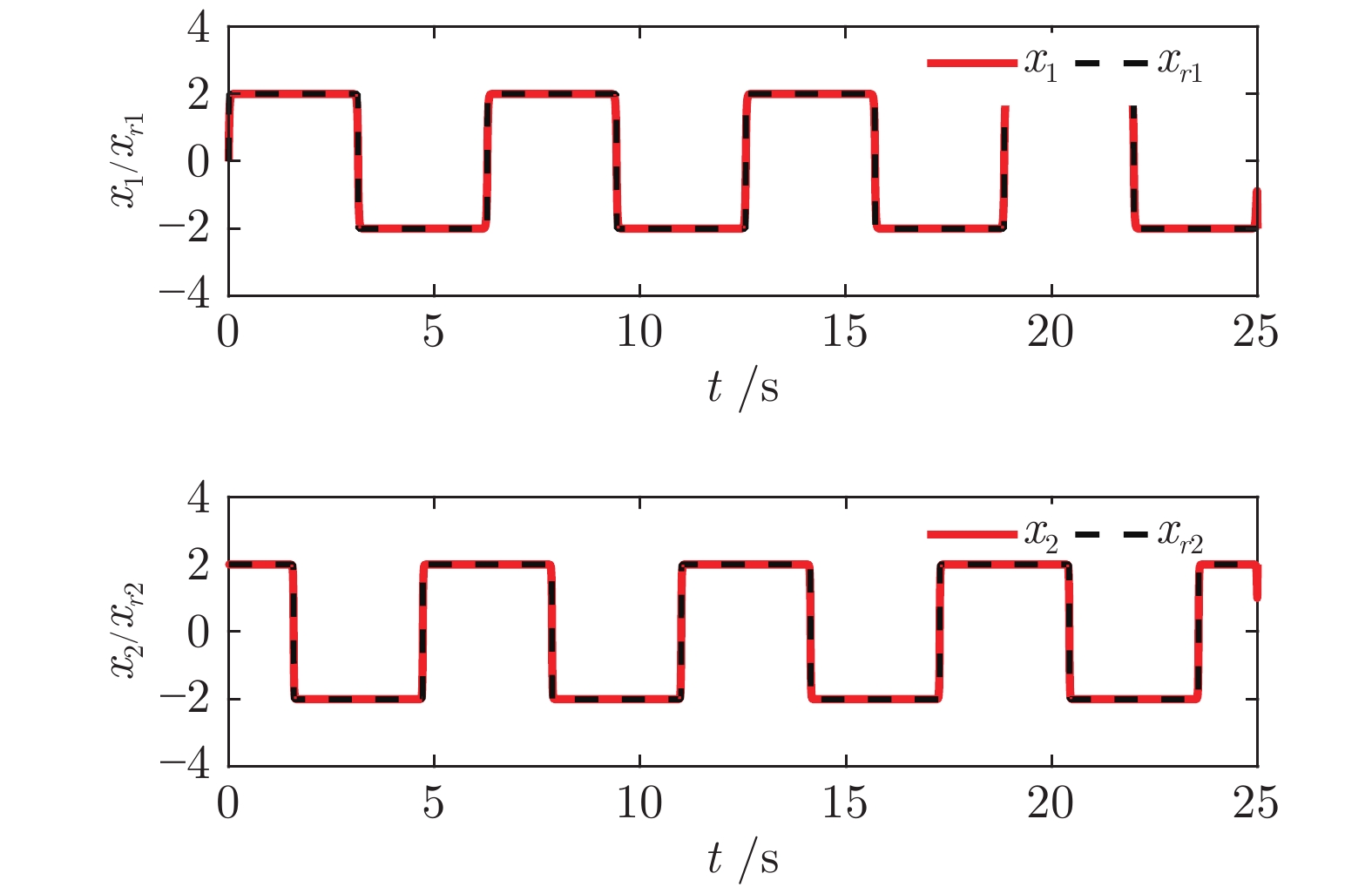
图 8 第2组参数下, 2种策略的最优性能比较
Fig. 8 Comparison of the performance under the second set of parameters
-
[1] Tien L, Schaffer A. Robust adaptive tracking control based on state feedback controller with integrator terms for elastic joint robots with uncertain parameters. IEEE Transactions on Control Systems Technology, 2018, 26(6): 2259−2267 doi: 10.1109/TCST.2017.2749564 [2] Qiu B, Wang G, Fan Y, Mu D, Sun X. Robust adaptive trajectory linearization control for tracking control of surface vessels with modeling uncertainties under input saturation. IEEE Access, 2018, 7: 5057−5070 [3] Chai R, Savvaris A, Tsourdos A, Chai S, Xia Y. Optimal tracking guidance for aeroassisted spacecraft reconnaissance mission based on receding horizon control. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(4): 1575−1588 doi: 10.1109/TAES.2018.2798219 [4] Fujimoto H, Kawamura A. Perfect tracking digital motion control based on two-degree-of-freedom multi-rate feedforward control. In: Proceedings of the International Workshop on Advanced Motion Control. Coimbra, Portugal: IEEE, 1998. 322−327 [5] Fujimoto H, Hori Y, Kawamura A. Perfect tracking control based on multirate feedforward control with generalized sampling Periods. IEEE Transactions on Industrial Electronics, 2001, 48(3): 636−644 doi: 10.1109/41.925591 [6] Liu L, Huang J. Global robust output regulation of output feedback systems with unknown high-frequency gain sign. IEEE Transactions on Automatic Control, 2006, 51(4): 625−631 doi: 10.1109/TAC.2006.872752 [7] Li T, Wang D, Feng G, Tong S. A DSC approach to robust adaptive NN tracking control for strict−feedback nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics, 2010, 40(3): 915−927 doi: 10.1109/TSMCB.2009.2033563 [8] Liu Y, Wang W, Tong S, Liu Y. Robust adaptive tracking control for nonlinear systems based on bounds of fuzzy approximation parameters. IEEE Transactions on Systems, Man, and Cybernetics, 2010, 40(1): 170−184 doi: 10.1109/TSMCA.2009.2030164 [9] Wang N, Sun J, Er M. Tracking-error-based universal adaptive fuzzy control for output tracking of nonlinear systems with completely unknown dynamics. IEEE Transactions on Fuzzy Systems, 2018, 26(2): 869−883 doi: 10.1109/TFUZZ.2017.2697399 [10] Lewis F, Vrabie D, Syrmos V. Optimal Control, New Jersey: John Wiley & sons, Inc, 2012. 190−195 [11] Fu Y, Hong C, Li J. Optimal decoupling control method and its application to a ball mill coal−pulverizing system Acta Automatica Sinica, 2018, 5(6): 1035−1043 doi: 10.1109/JAS.2018.7511219 [12] Modares H, Lewis F. Linear quadratic tracking control of partially−unknown continuous−time systems using reinforcement learning. IEEE Transactions on Automatic Control, 2014, 59(11): 3051−3056 doi: 10.1109/TAC.2014.2317301 [13] Kiumarsi B, Lewis F, Bagher M, Sistani N, Karimpour A. Optimal tracking control of unknown discrete−time linear systems using input−output measured data. IEEE Transactions on Cybernetics, 2015, 45(12): 2770−2779 doi: 10.1109/TCYB.2014.2384016 [14] Park Y, Choi M, Lee K. An optimal tracking neuro controller for nonlinear dynamic systems. IEEE Transactions on Neural Networks, 1996, 7(5): 1099−1110 doi: 10.1109/72.536307 [15] Zhang H, Wei Q, Luo Y. A novel infinite−time optimal tracking control scheme for a class of discrete−time nonlinear systems via the greedy HDP iteration algorithm. IEEE Transactions on Systems, Man, and Cybernetics, 2008, 38(4): 937−942 doi: 10.1109/TSMCB.2008.920269 [16] Zhang H, Song R, Wei Q, Zhang T. Optimal tracking control for a class of nonlinear discrete−time systems with time delays based on heuristic dynamic programming. IEEE Transactions on Neural Networks, 2011, 22(12): 1851−1862 doi: 10.1109/TNN.2011.2172628 [17] Zhang H, Cui L, Zhang X, Luo Y. Data−driven robust approximate optimal tracking control for unknown general nonlinear systems using adaptive dynamic programming method. IEEE Transactions on Neural Networks, 2011, 22(12): 2226−2236 doi: 10.1109/TNN.2011.2168538 [18] 王康, 李晓理, 贾超, 宋桂芝. 基于自适应动态规划的矿渣微粉生产过程跟踪控制. 自动化学报, 2016, 42(10): 1542−1551Wang Kang, Li Xiao−Li, Jia Chao, Song Gui−Zhi. Optimal tracking vontrol for slag grinding process based on adaptive dynamic programming Acta Automatica Sinica, 2016, 42(10): 1542−1551 [19] 袁兆麟, 何润姿, 姚超, 李佳, 班晓娟, 李潇睿. 基于强化学习的浓密机底流浓度在线控制算法. 自动化学报, 2021, 47(7):1558-1571Yuan Zhao−Lin, He Run−Zi, Yao Chao, Li Jia, Ban Xiao−Juan, Li Xiao−Rui. An online concentration control algorithm for underflow of thickener based on reinforcement learning. Acta Automatica Sinica, 2021, 47(7):1558-1571 [20] 郭壁垒, 苏宏业, 柳向斌, 刘之涛. 带有非线性不确定奇异系统的积分滑模控制. 控制理论与应用, 2010, 27(7): 873−879GUO Bi−Lei, SU Hong−Ye, LIU Xiang−Bin, LIU Zhi−Tao. Integral sliding mode control for singular systems with nonlinear uncertainties. Control Theory & Applications, 27(7): 873−879 -

 下载:
下载:




图(9)
计量
- 文章访问数: 871
- HTML全文浏览量: 118
- PDF下载量: 292
- 被引次数: 0
