2022年 第48卷 第7期
2022, 48(7): 1625-1649.
doi: 10.16383/j.aas.c210089
摘要:
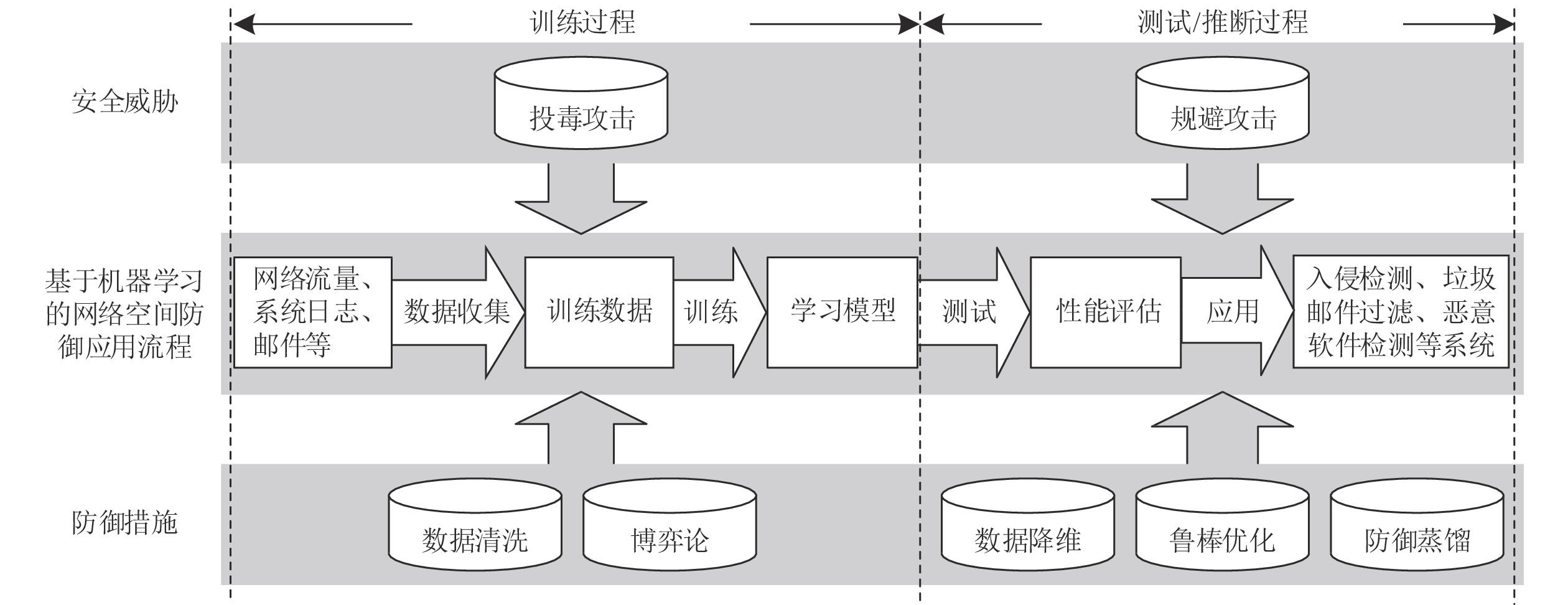
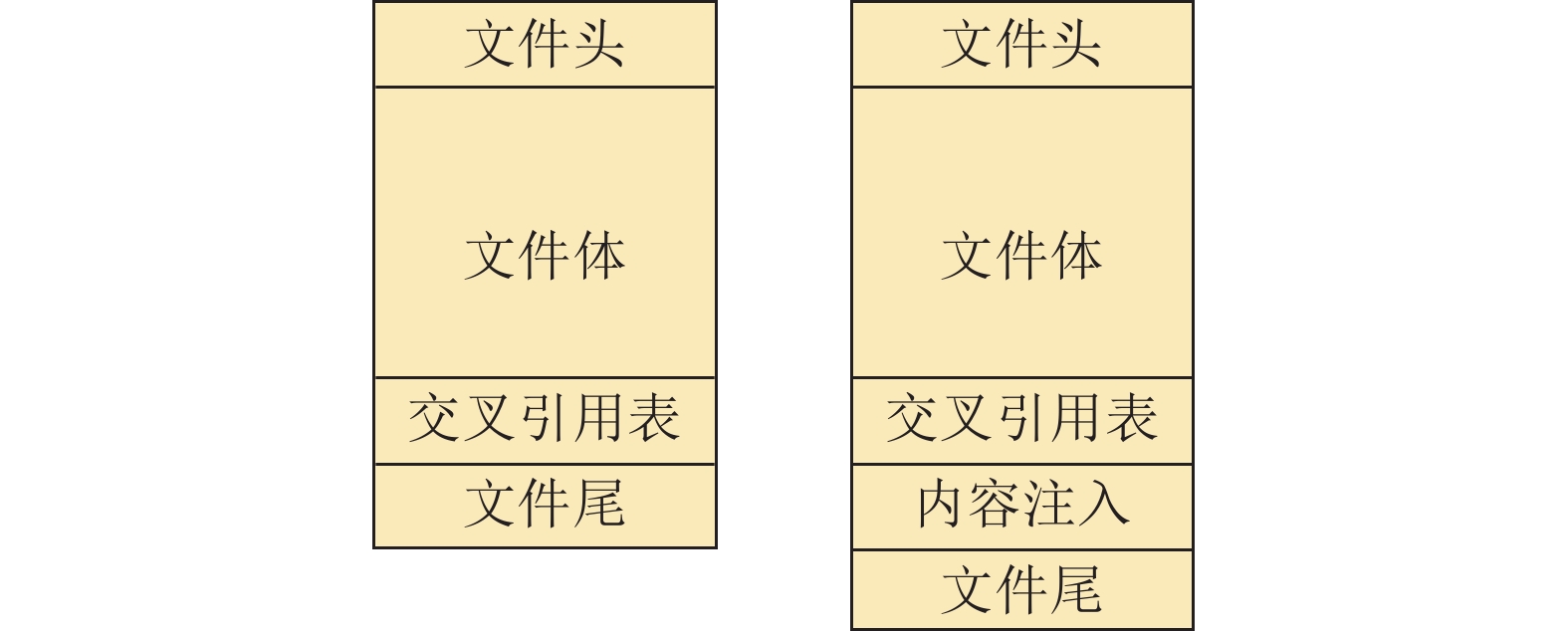
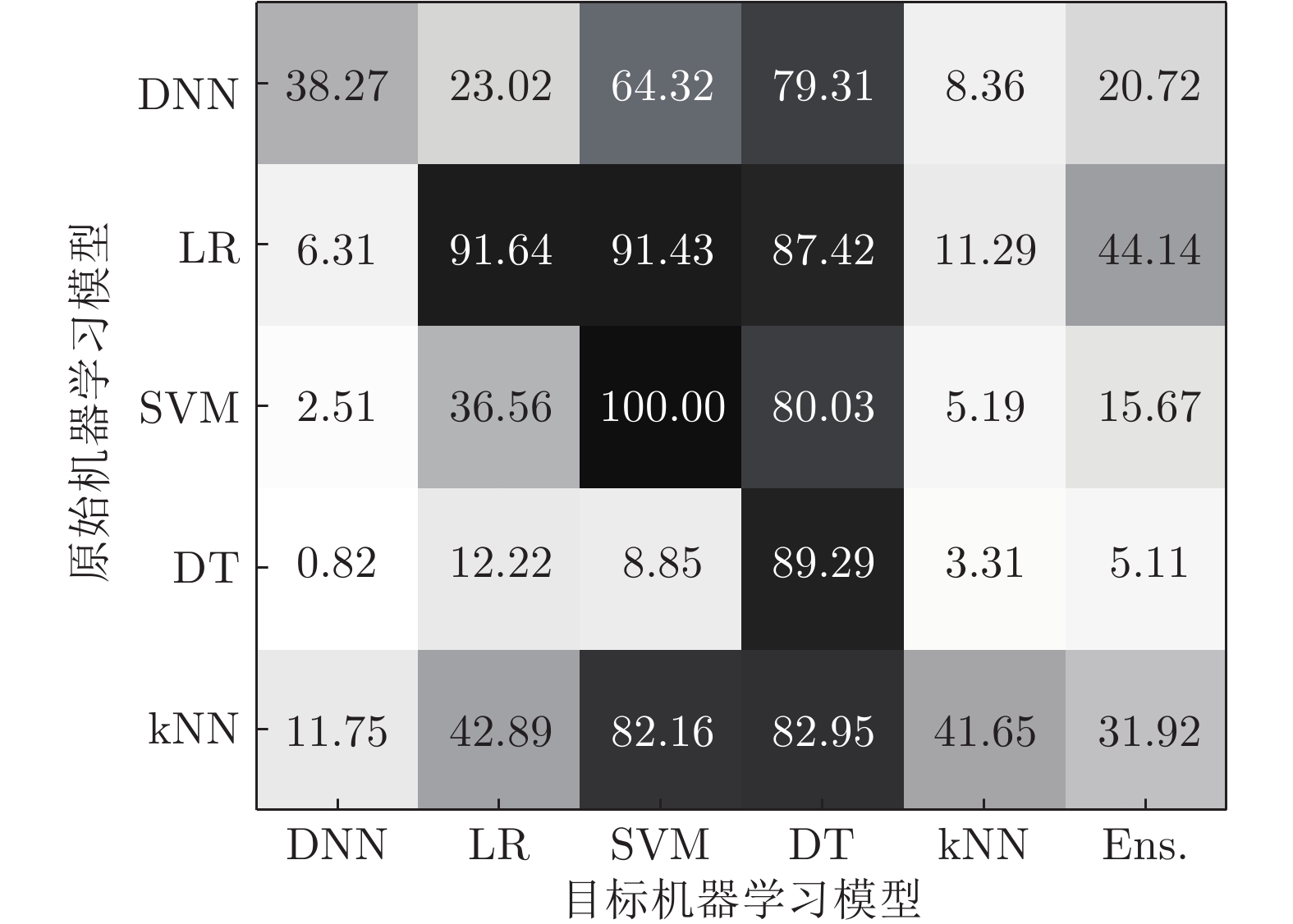
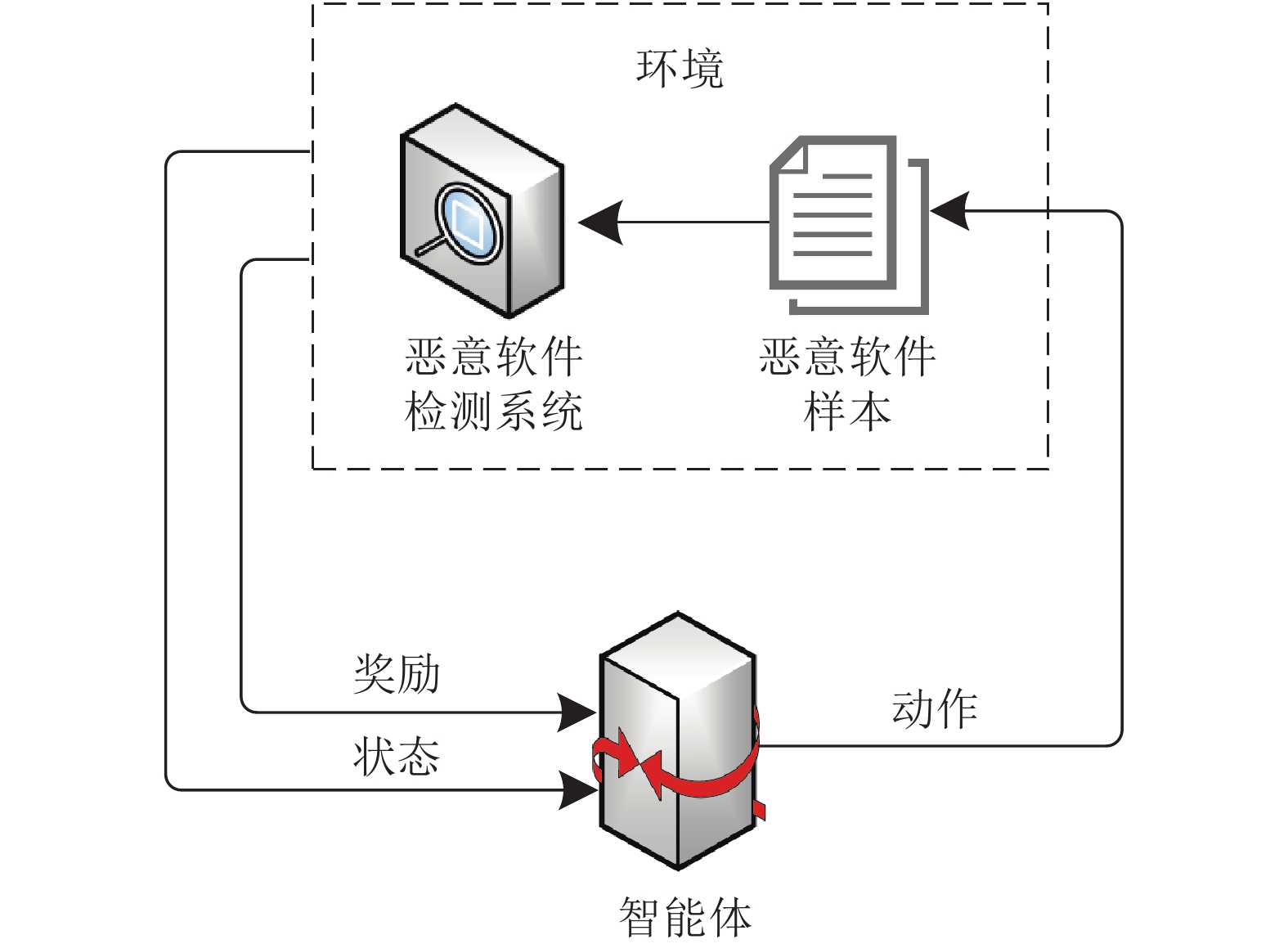
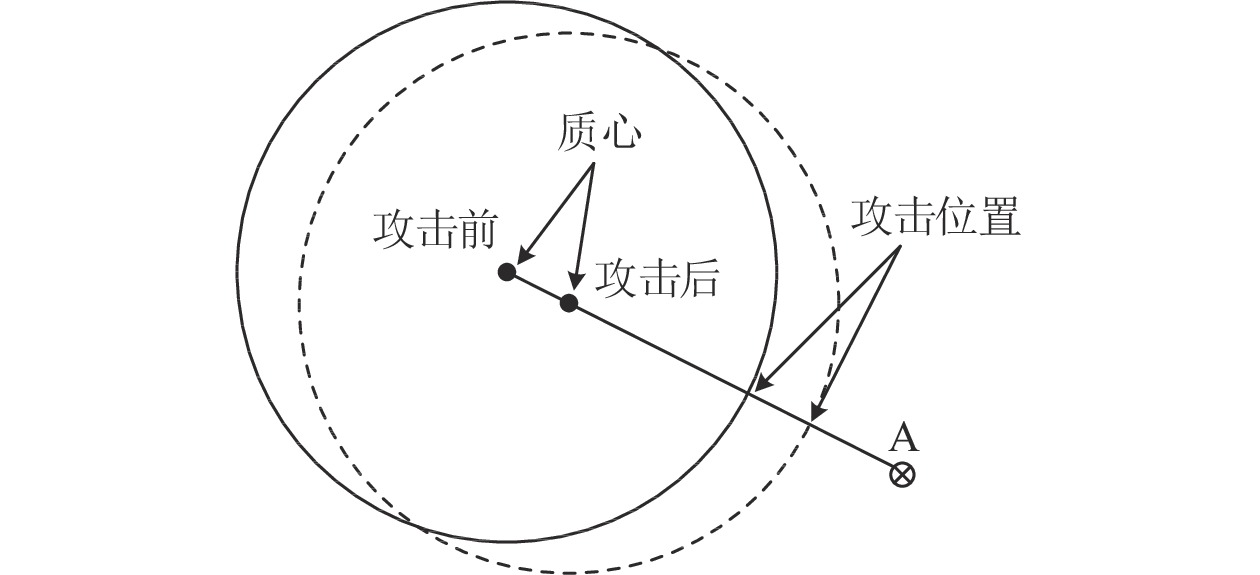
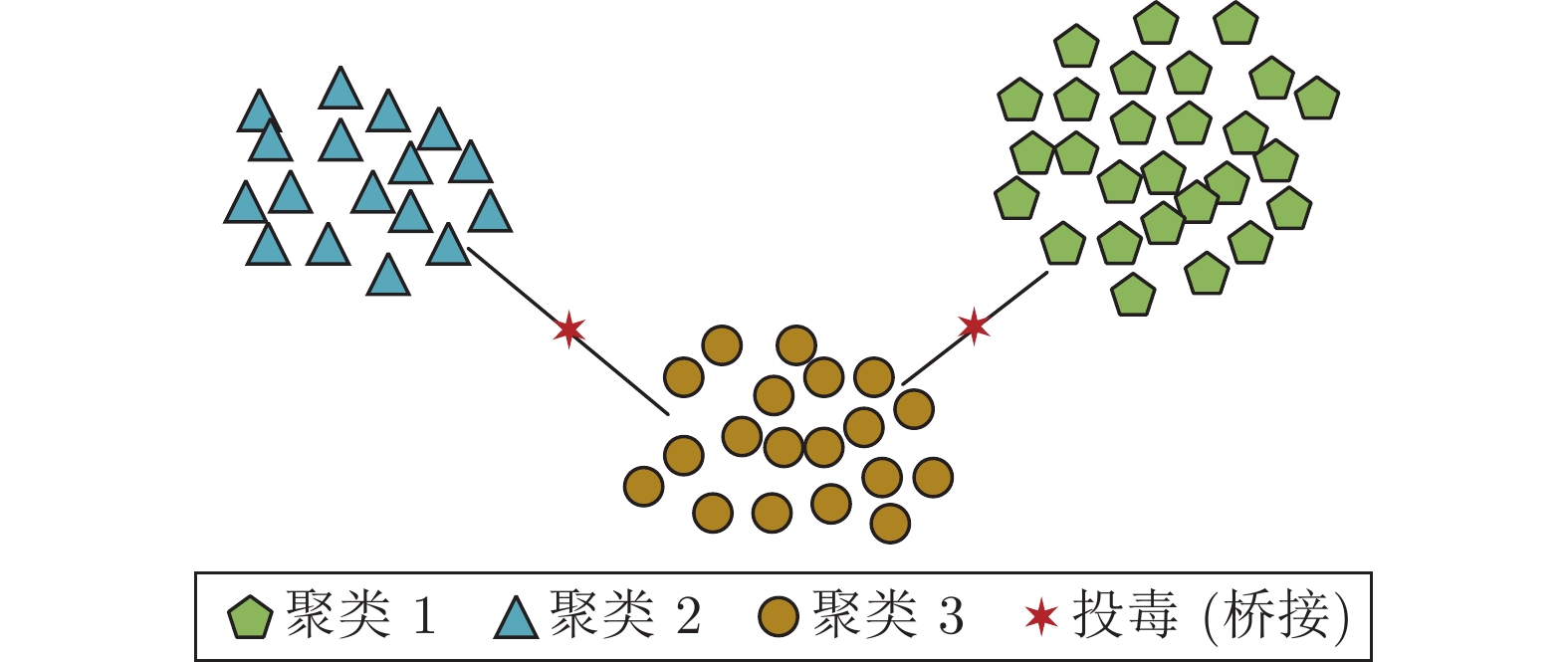
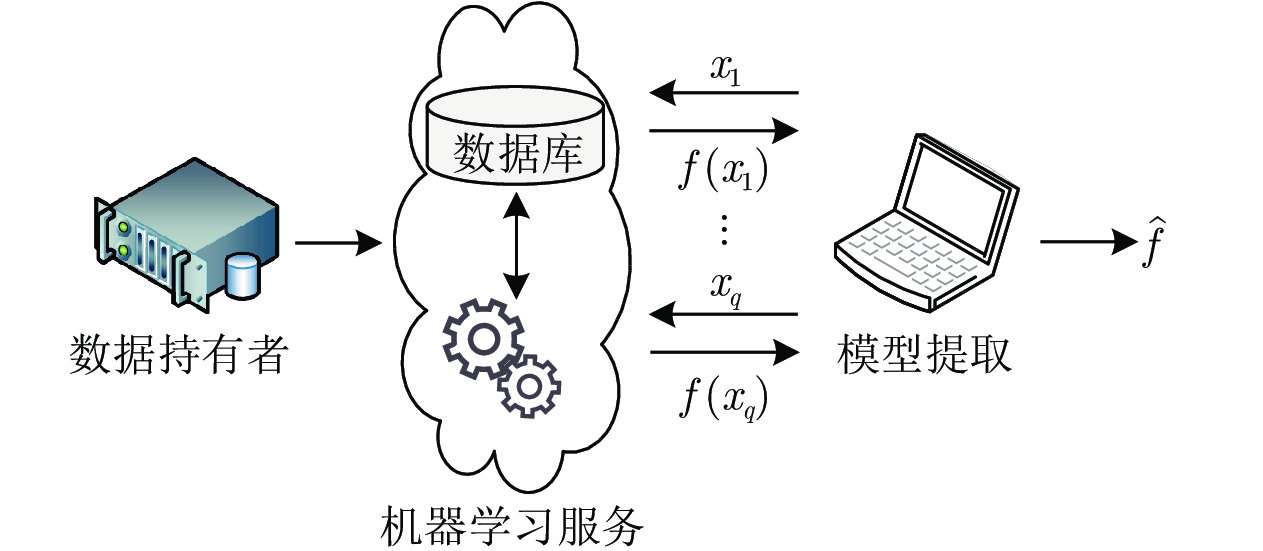
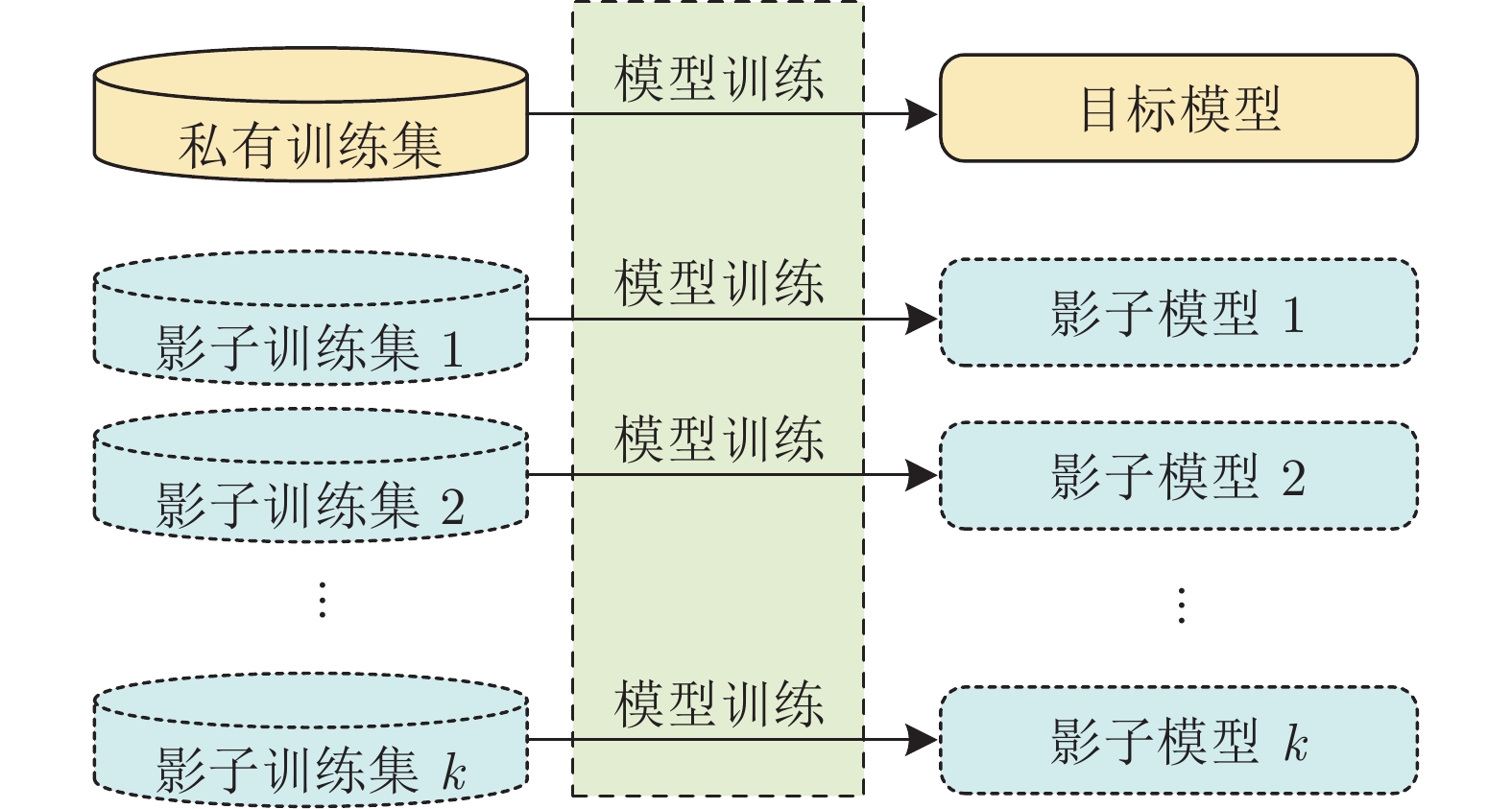
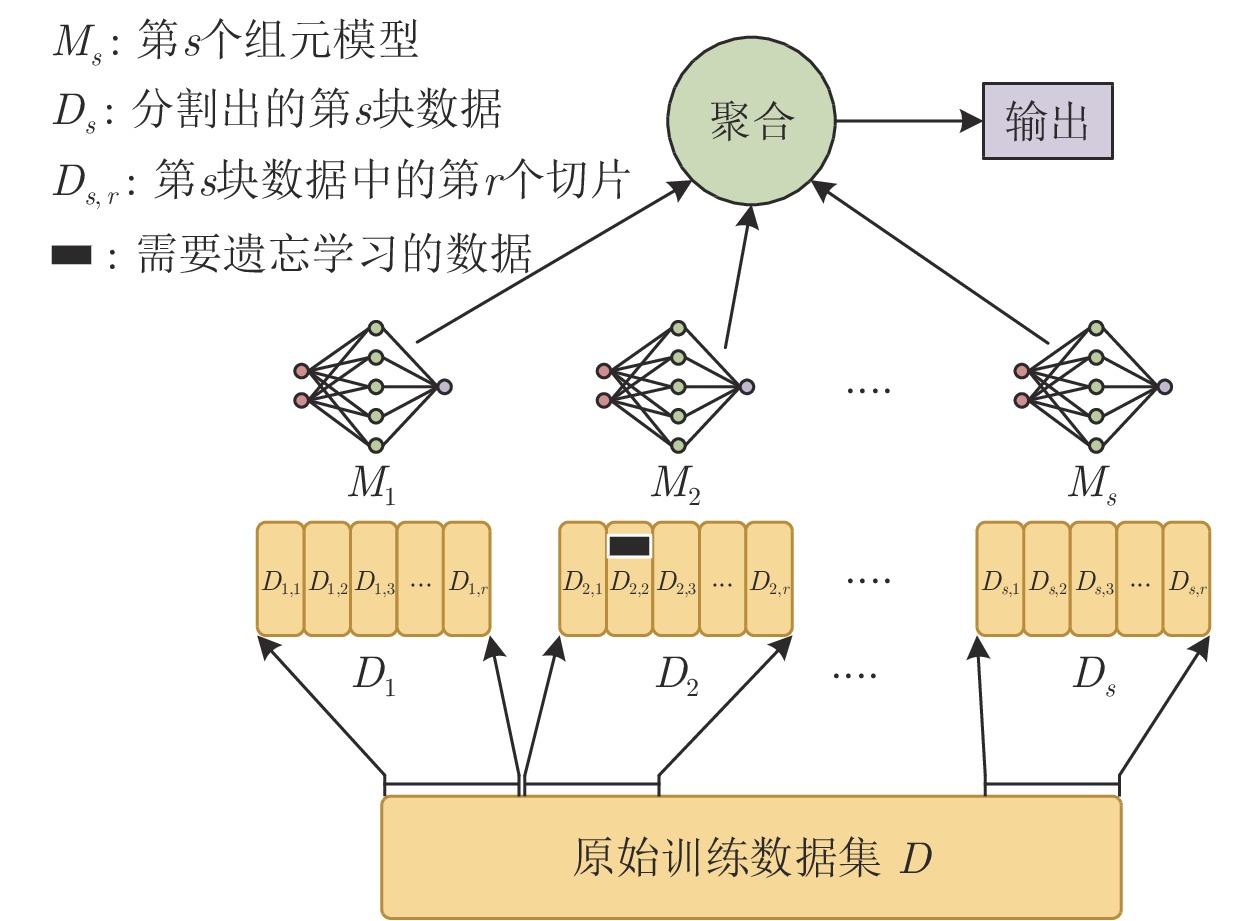
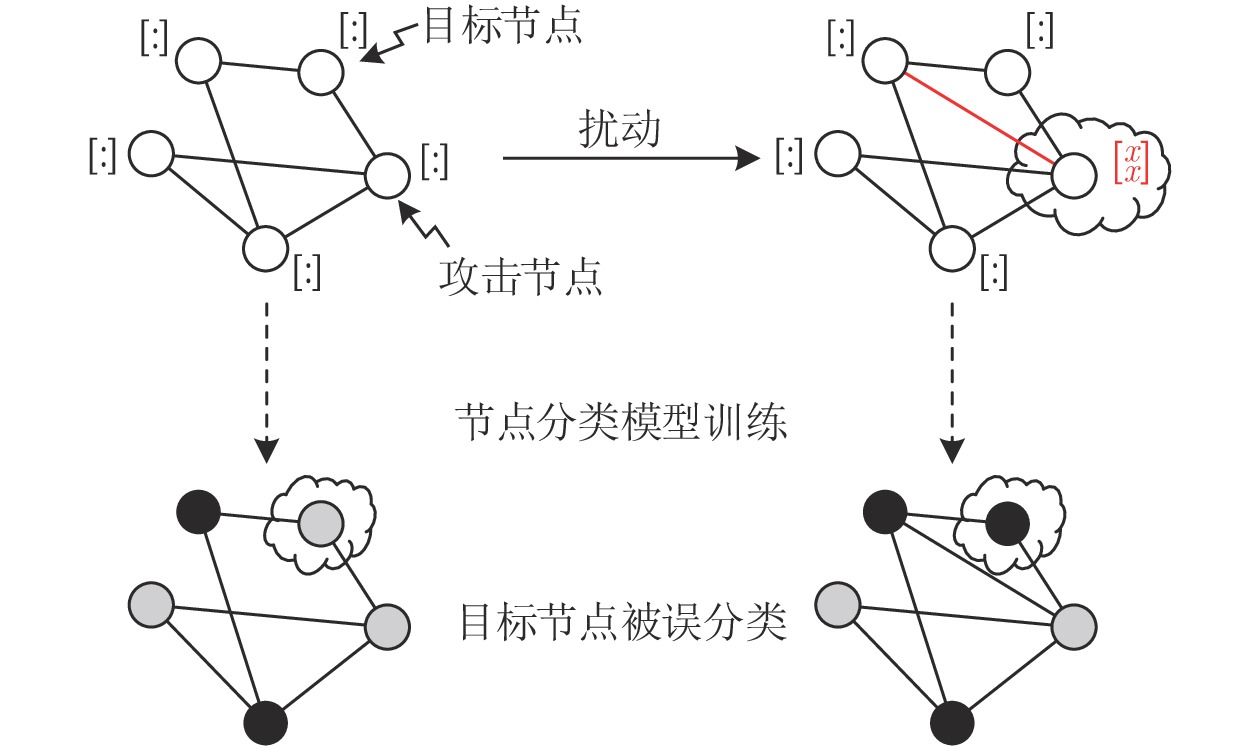
机器学习以强大的自适应性和自学习能力成为网络空间防御的研究热点和重要方向. 然而机器学习模型在网络空间环境下存在受到对抗攻击的潜在风险, 可能成为防御体系中最为薄弱的环节, 从而危害整个系统的安全. 为此科学分析安全问题场景, 从运行机理上探索算法可行性和安全性, 对运用机器学习模型构建网络空间防御系统大有裨益. 全面综述对抗机器学习这一跨学科研究领域在网络空间防御中取得的成果及以后的发展方向. 首先, 介绍了网络空间防御和对抗机器学习等背景知识; 其次, 针对机器学习在网络空间防御中可能遭受的攻击, 引入机器学习敌手模型概念, 目的是科学评估其在特定威胁场景下的安全属性; 然后, 针对网络空间防御的机器学习算法, 分别论述了在测试阶段发动规避攻击、在训练阶段发动投毒攻击、在机器学习全阶段发动隐私窃取的方法, 进而研究如何在网络空间对抗环境下, 强化机器学习模型的防御方法; 最后, 展望了网络空间防御中对抗机器学习研究的未来方向和有关挑战.
机器学习以强大的自适应性和自学习能力成为网络空间防御的研究热点和重要方向. 然而机器学习模型在网络空间环境下存在受到对抗攻击的潜在风险, 可能成为防御体系中最为薄弱的环节, 从而危害整个系统的安全. 为此科学分析安全问题场景, 从运行机理上探索算法可行性和安全性, 对运用机器学习模型构建网络空间防御系统大有裨益. 全面综述对抗机器学习这一跨学科研究领域在网络空间防御中取得的成果及以后的发展方向. 首先, 介绍了网络空间防御和对抗机器学习等背景知识; 其次, 针对机器学习在网络空间防御中可能遭受的攻击, 引入机器学习敌手模型概念, 目的是科学评估其在特定威胁场景下的安全属性; 然后, 针对网络空间防御的机器学习算法, 分别论述了在测试阶段发动规避攻击、在训练阶段发动投毒攻击、在机器学习全阶段发动隐私窃取的方法, 进而研究如何在网络空间对抗环境下, 强化机器学习模型的防御方法; 最后, 展望了网络空间防御中对抗机器学习研究的未来方向和有关挑战.

2022, 48(7): 1650-1663.
doi: 10.16383/j.aas.c200257
摘要:
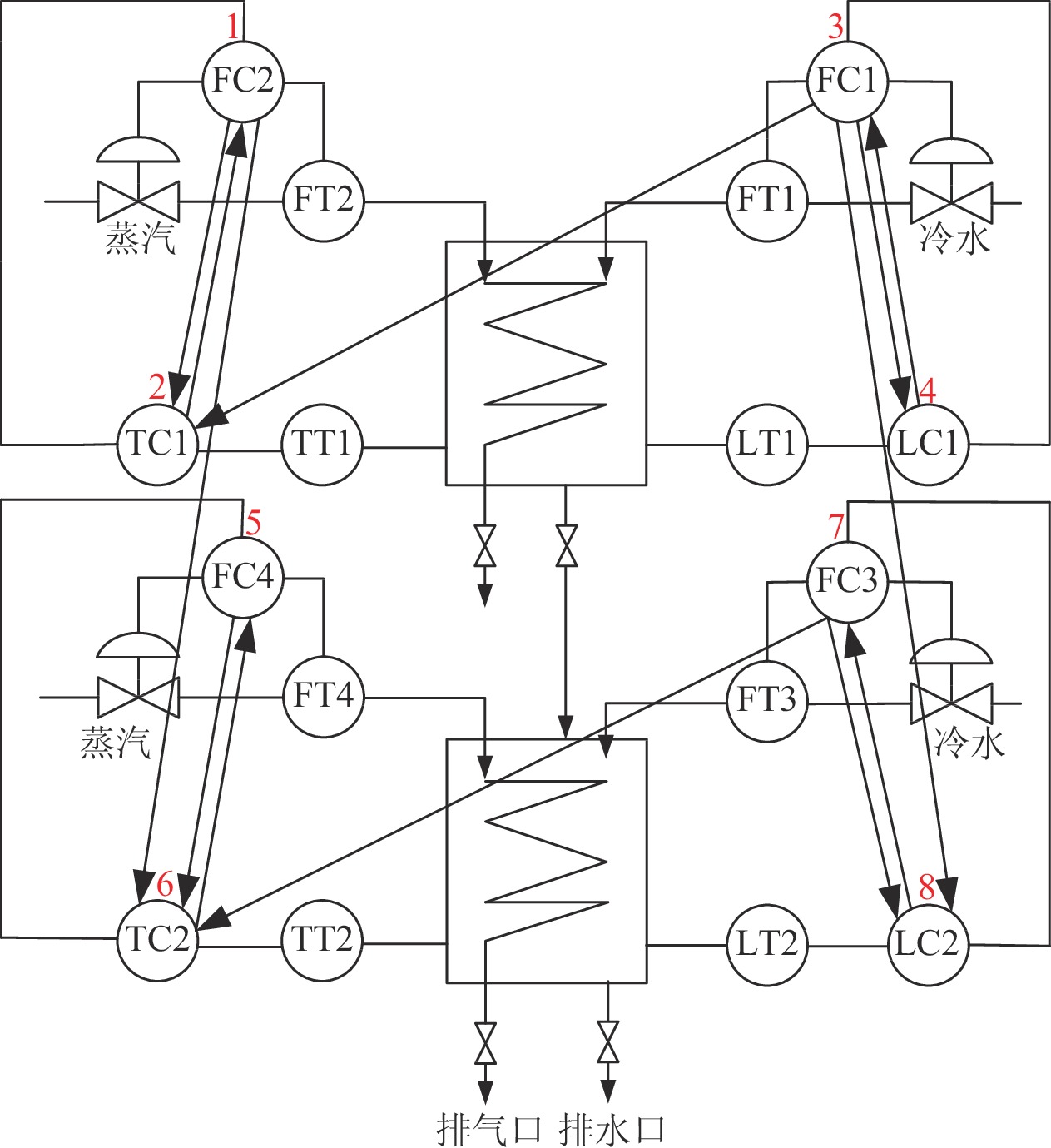
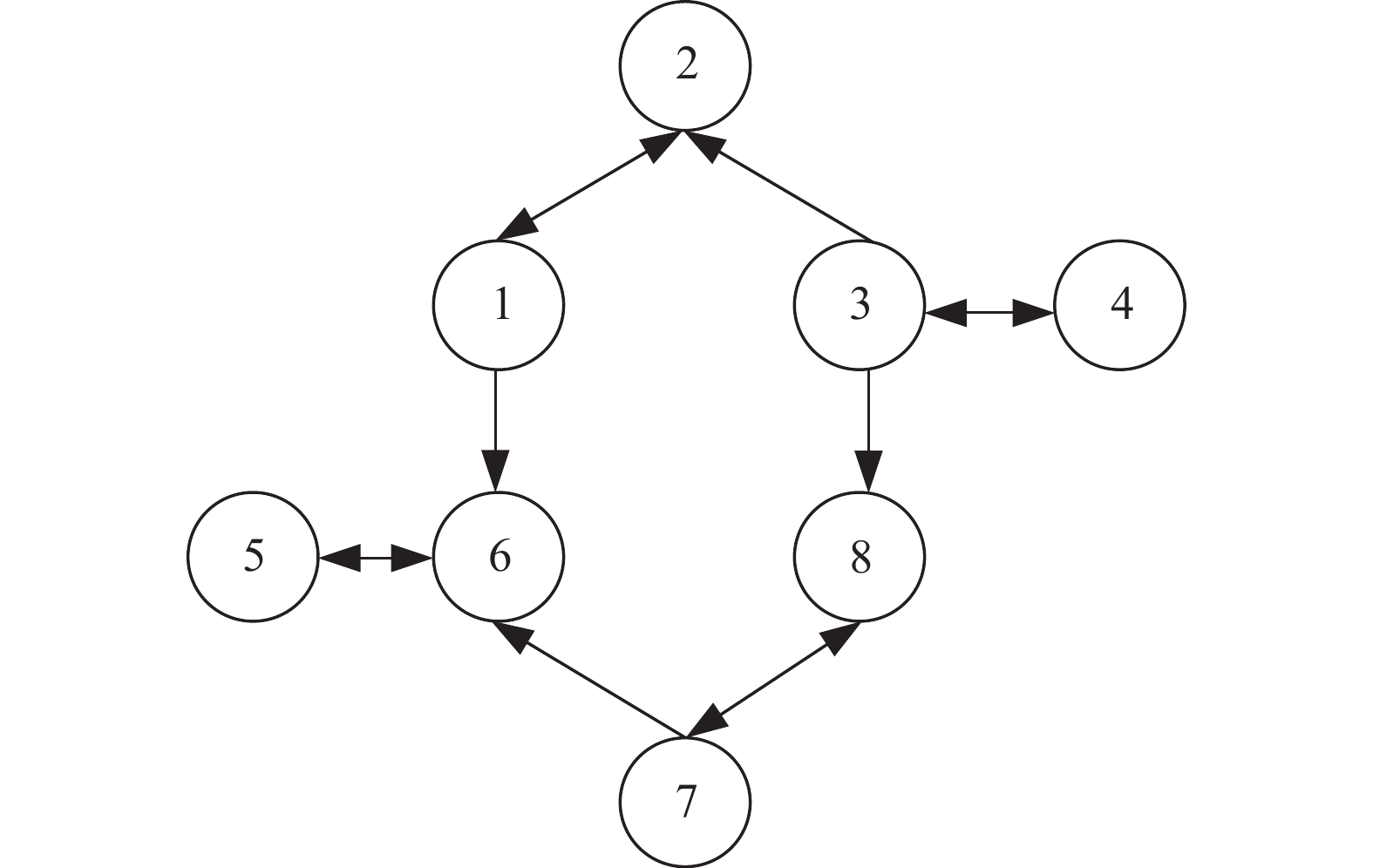
故障根源诊断与传播路径识别是故障诊断框架下的关键核心问题, 是保障工业过程安全生产及获得可靠产品质量的有效手段, 是当前过程控制领域的研究热点. 该技术的研究不仅丰富了故障诊断理论, 而且对故障诊断技术在工程中的推广与应用具有重要意义. 阐述了基于知识、数据及知识与数据联合驱动的故障根源诊断与传播路径识别方法的基本思想、适用条件和优劣特点, 分类概述了相关方法的研究现状. 探讨了该领域亟待解决的问题及未来的发展方向, 包括: 1)“三个维度”视角下的工业过程故障根源诊断与传播路径识别; 2)基于制造大数据分析与因果关系挖掘的工业过程质量精准追溯; 3)面向传播、耦合、多重并发特性的工业过程复合故障分布式诊断; 4)基于多源异构动态信息融合的工业过程异常工况时空追溯可视化.
故障根源诊断与传播路径识别是故障诊断框架下的关键核心问题, 是保障工业过程安全生产及获得可靠产品质量的有效手段, 是当前过程控制领域的研究热点. 该技术的研究不仅丰富了故障诊断理论, 而且对故障诊断技术在工程中的推广与应用具有重要意义. 阐述了基于知识、数据及知识与数据联合驱动的故障根源诊断与传播路径识别方法的基本思想、适用条件和优劣特点, 分类概述了相关方法的研究现状. 探讨了该领域亟待解决的问题及未来的发展方向, 包括: 1)“三个维度”视角下的工业过程故障根源诊断与传播路径识别; 2)基于制造大数据分析与因果关系挖掘的工业过程质量精准追溯; 3)面向传播、耦合、多重并发特性的工业过程复合故障分布式诊断; 4)基于多源异构动态信息融合的工业过程异常工况时空追溯可视化.



2022, 48(7): 1664-1677.
doi: 10.16383/j.aas.c190486
摘要:
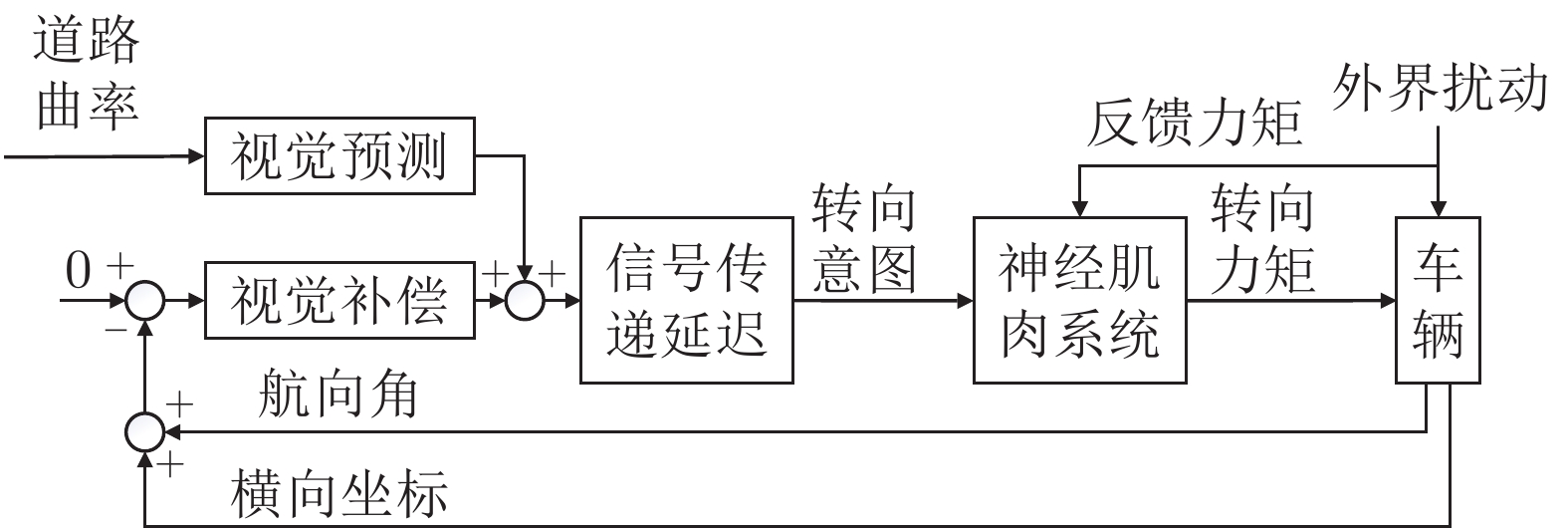
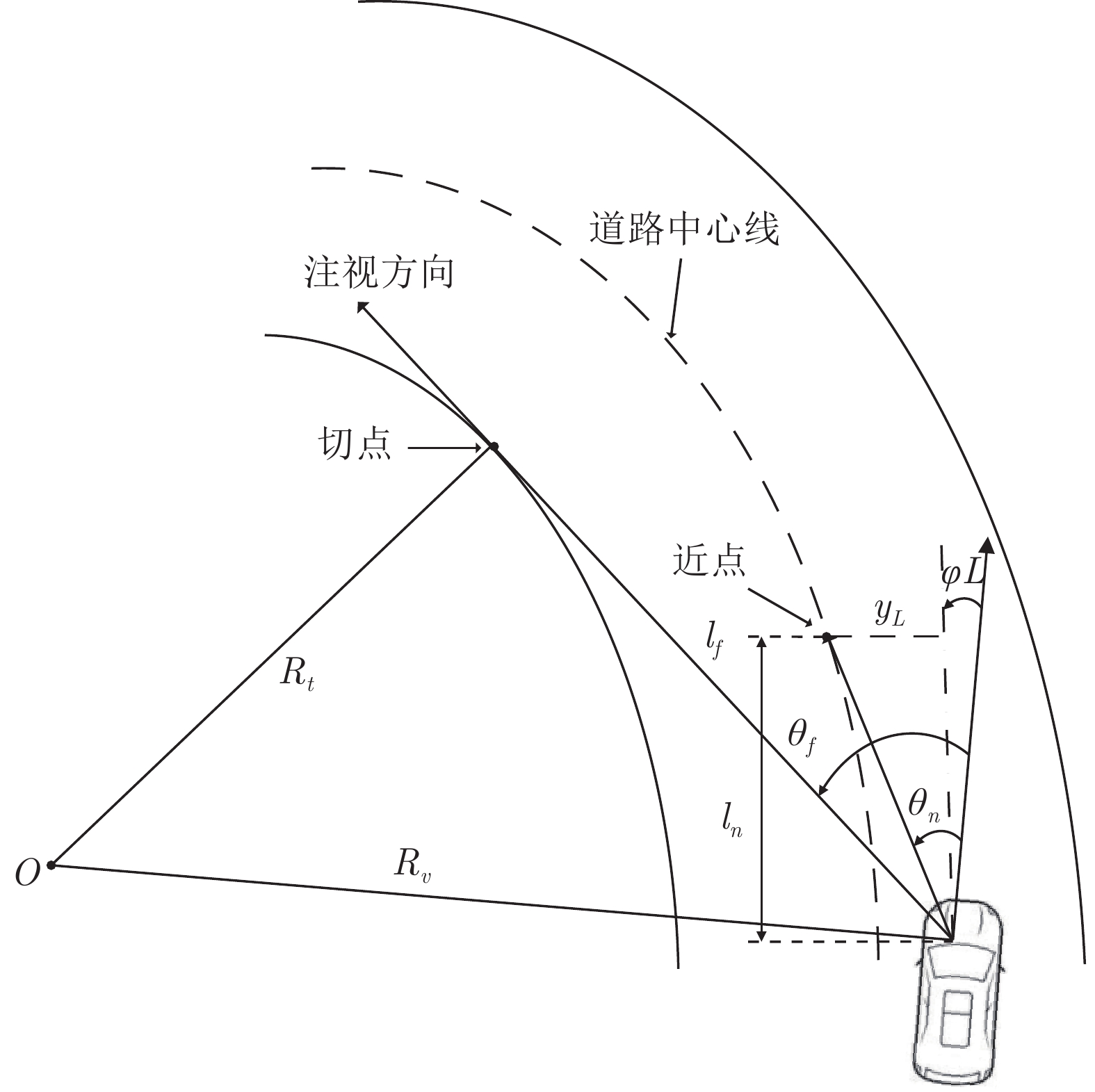
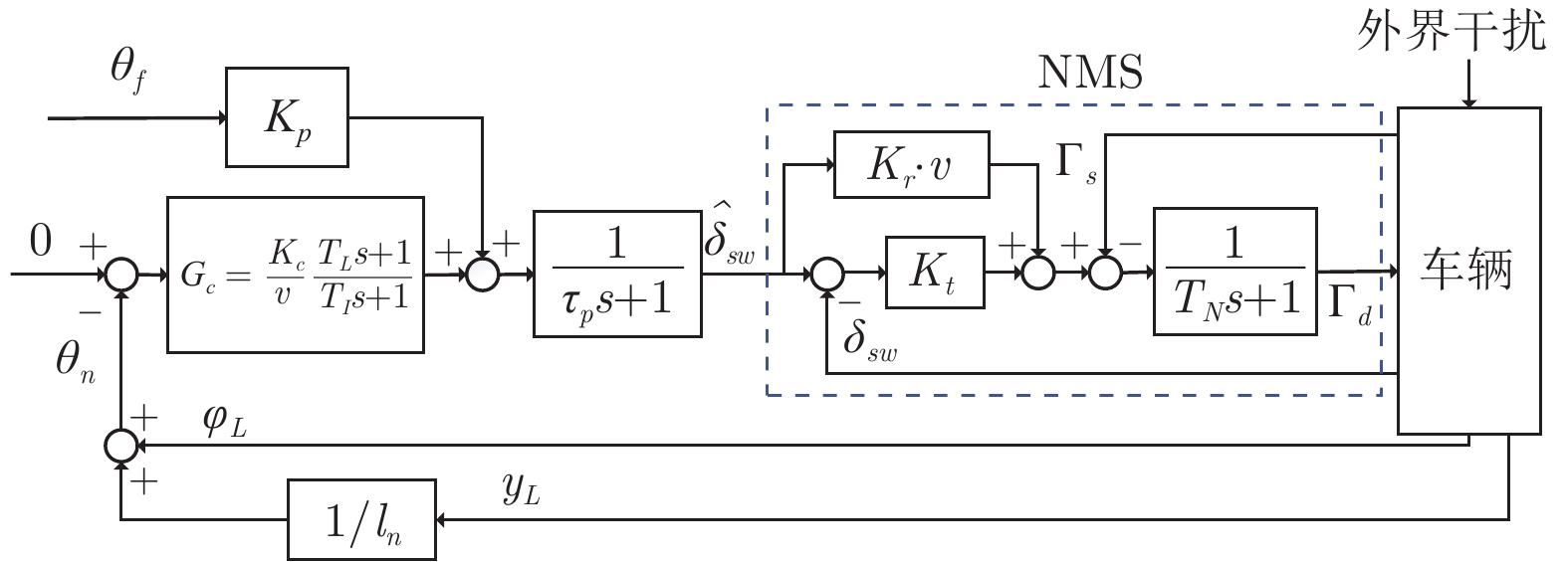
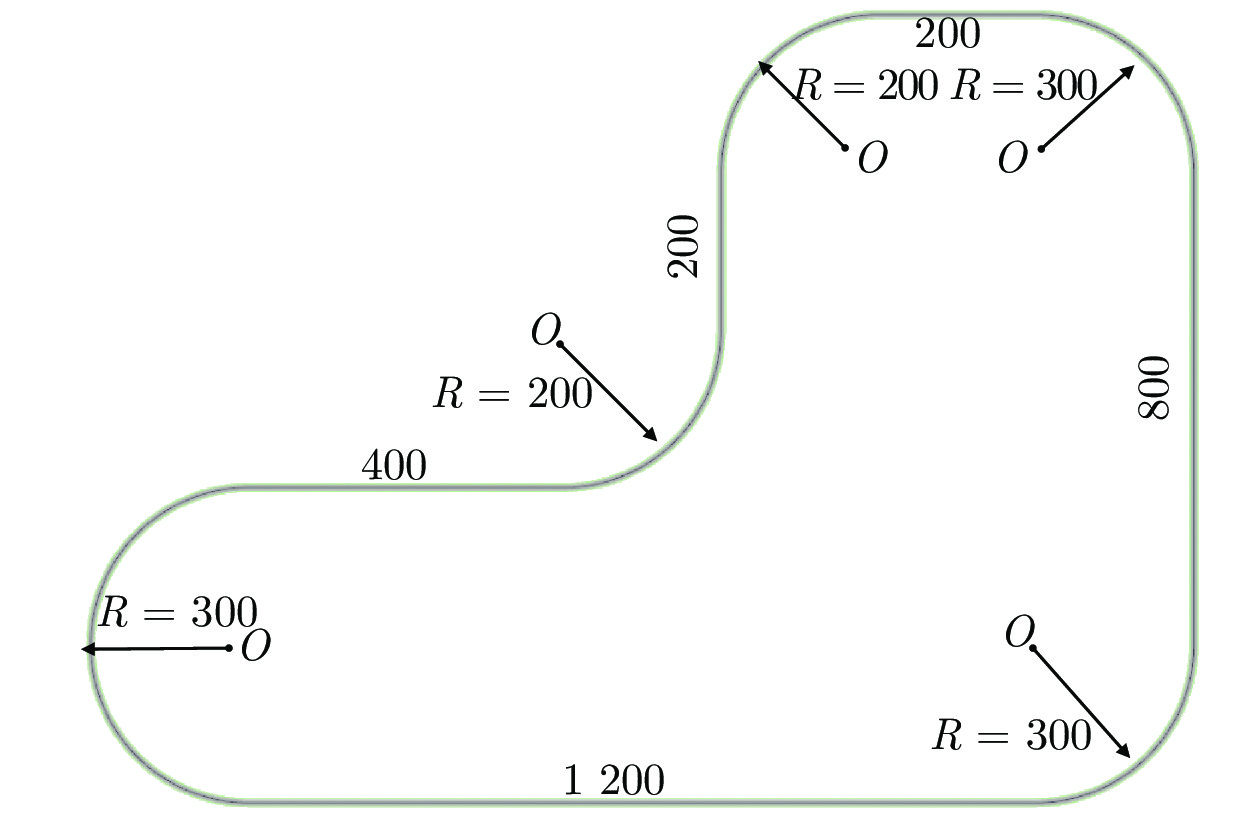
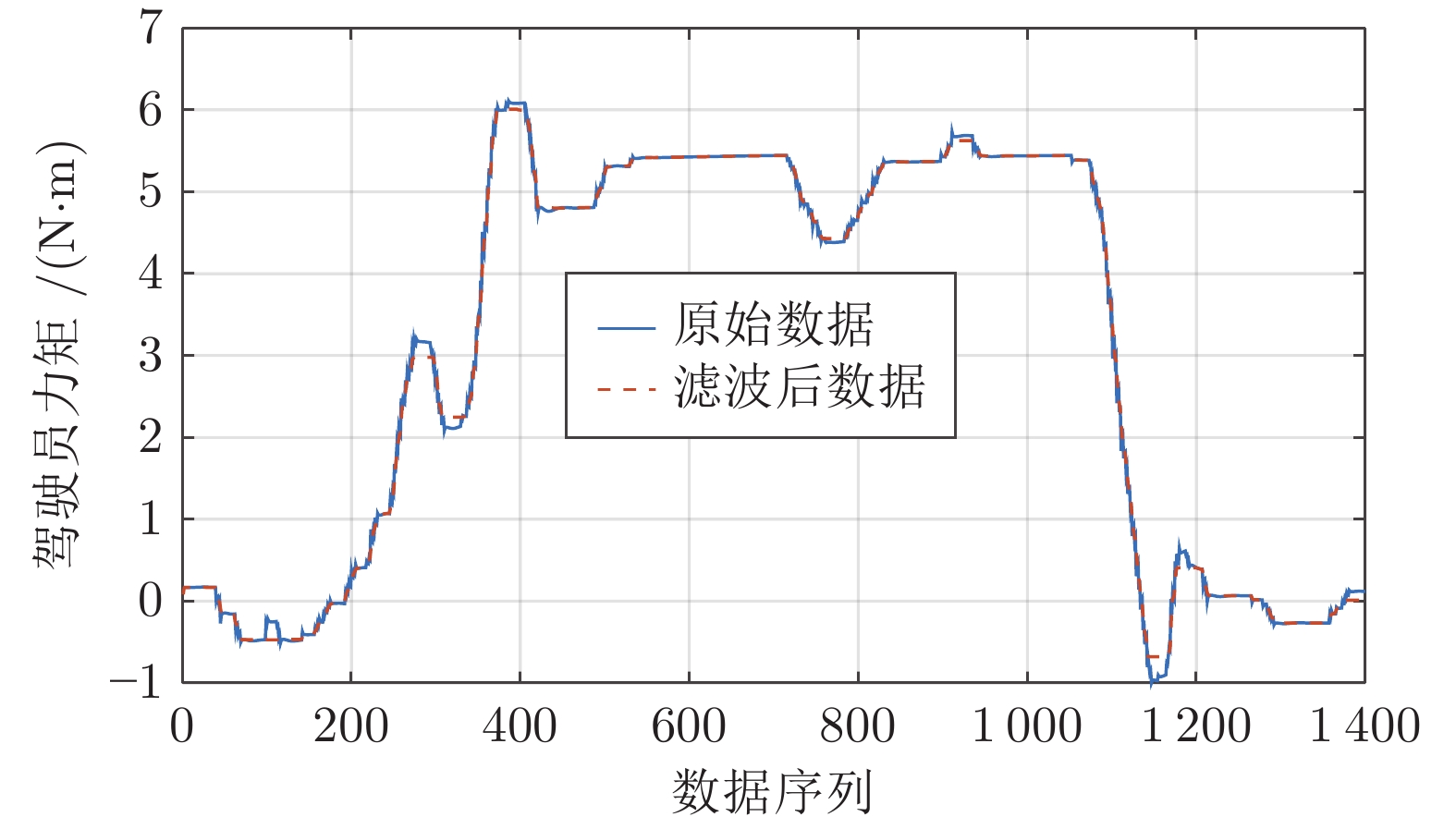
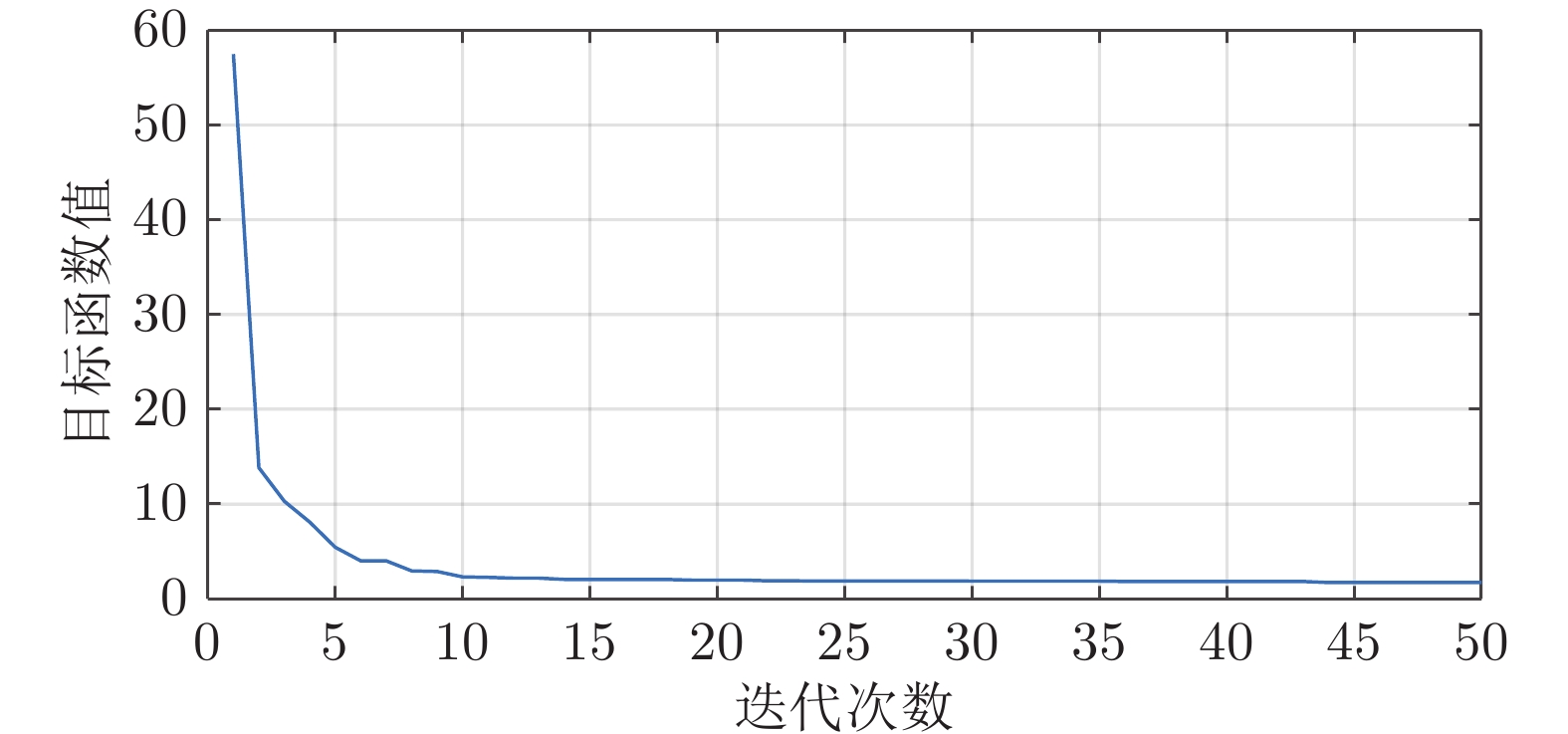
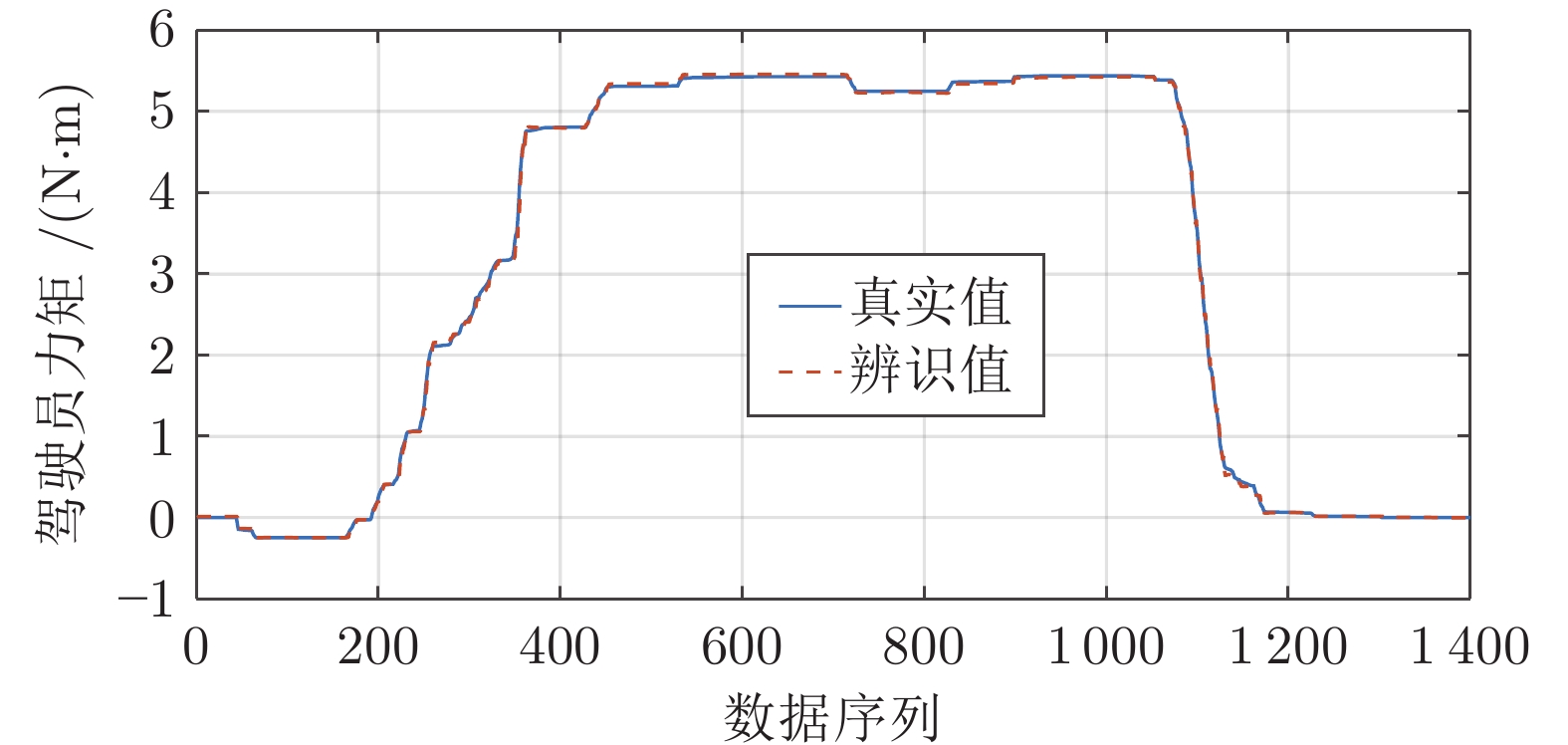
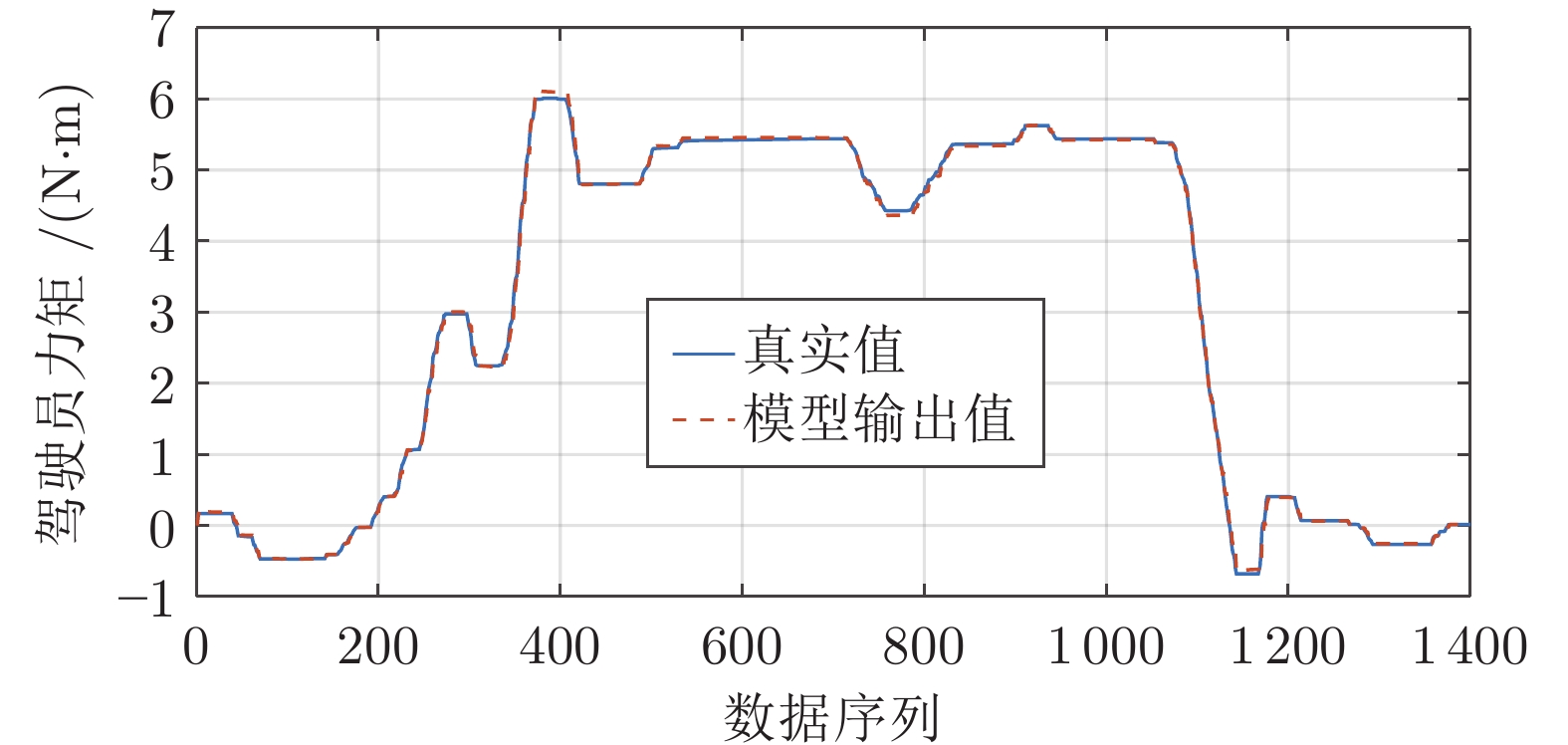
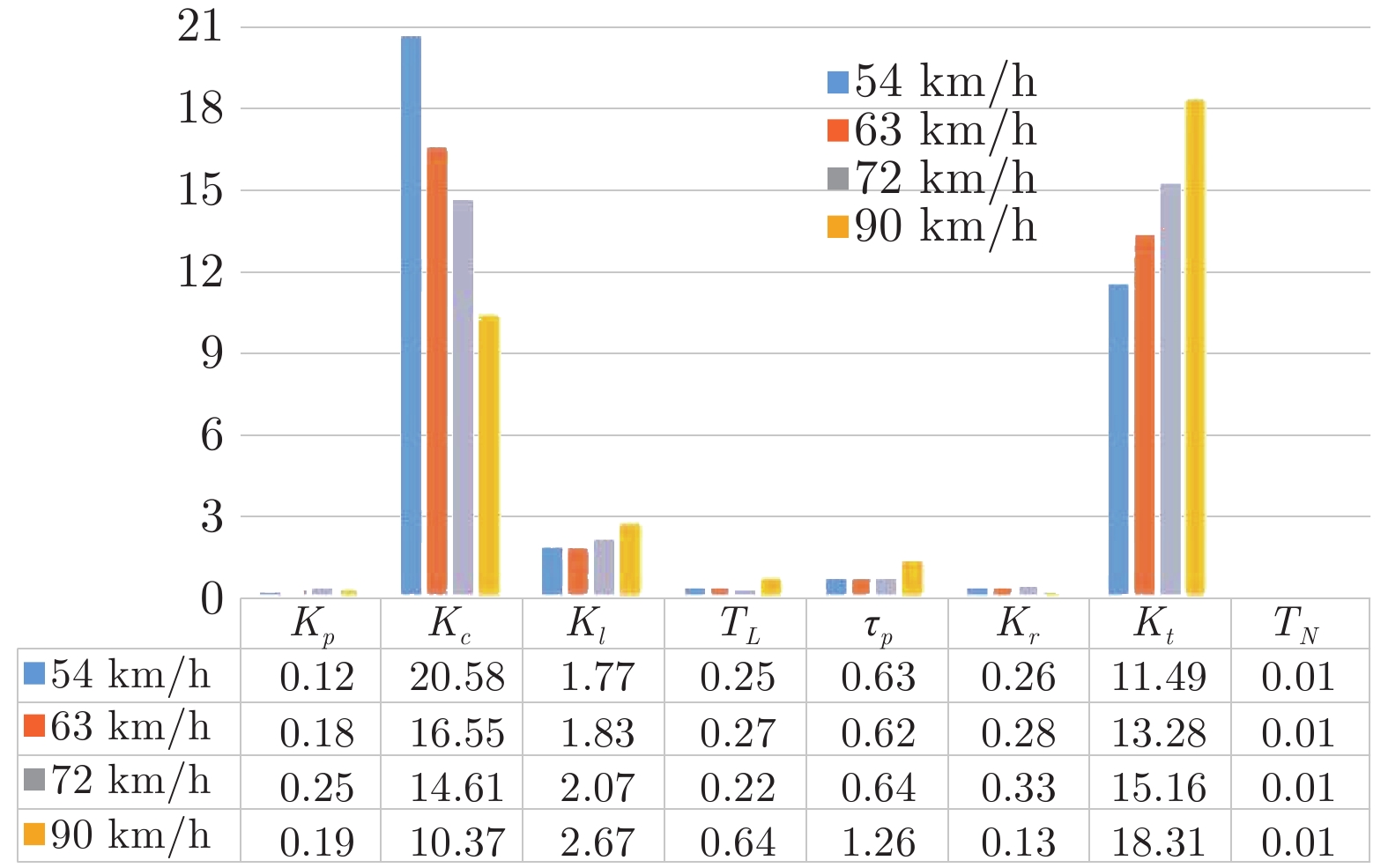
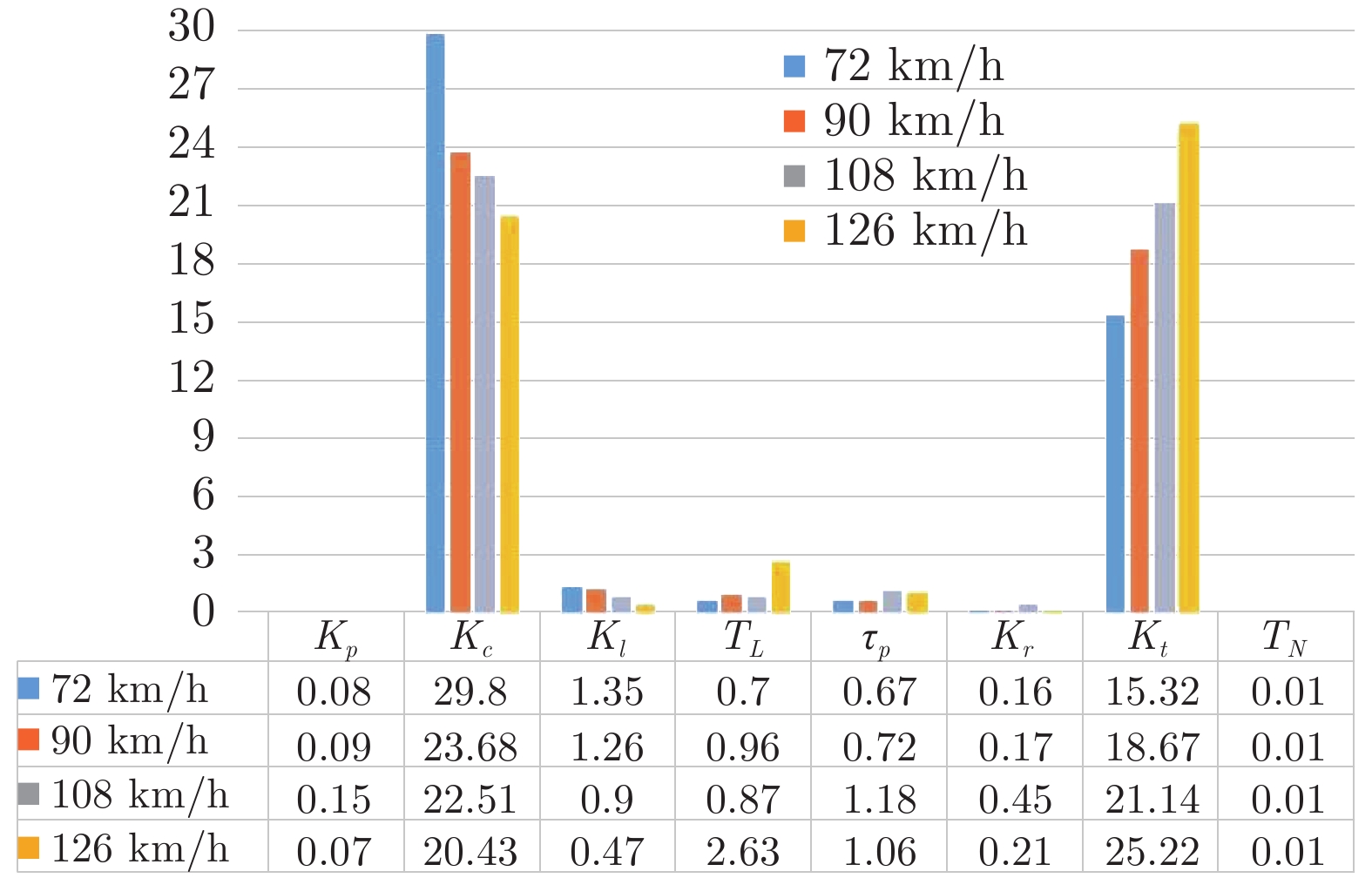
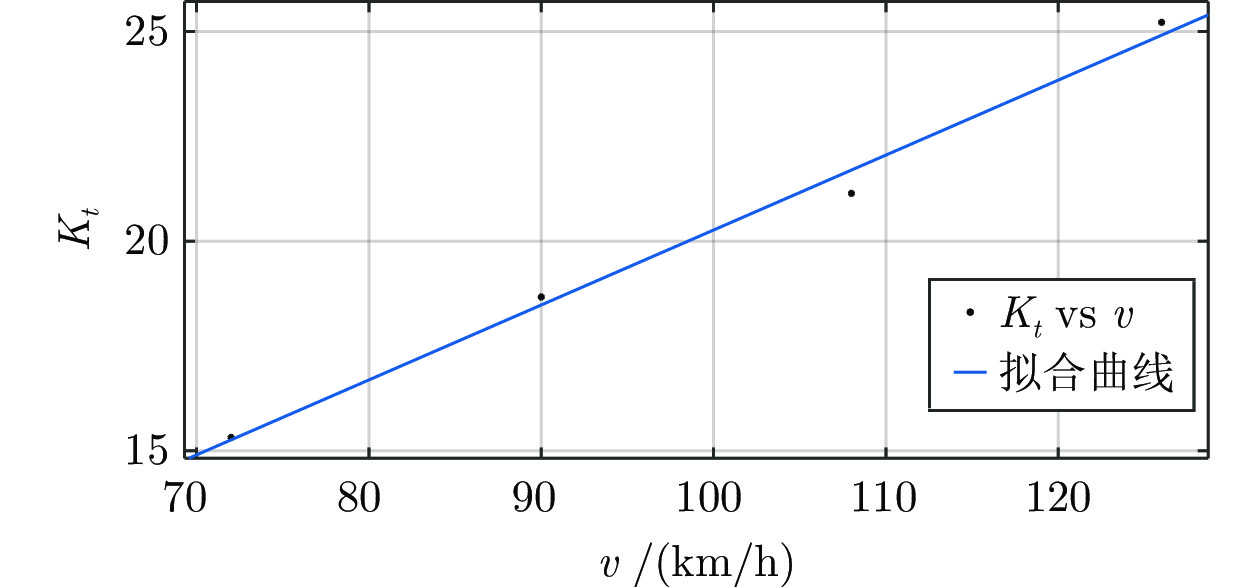
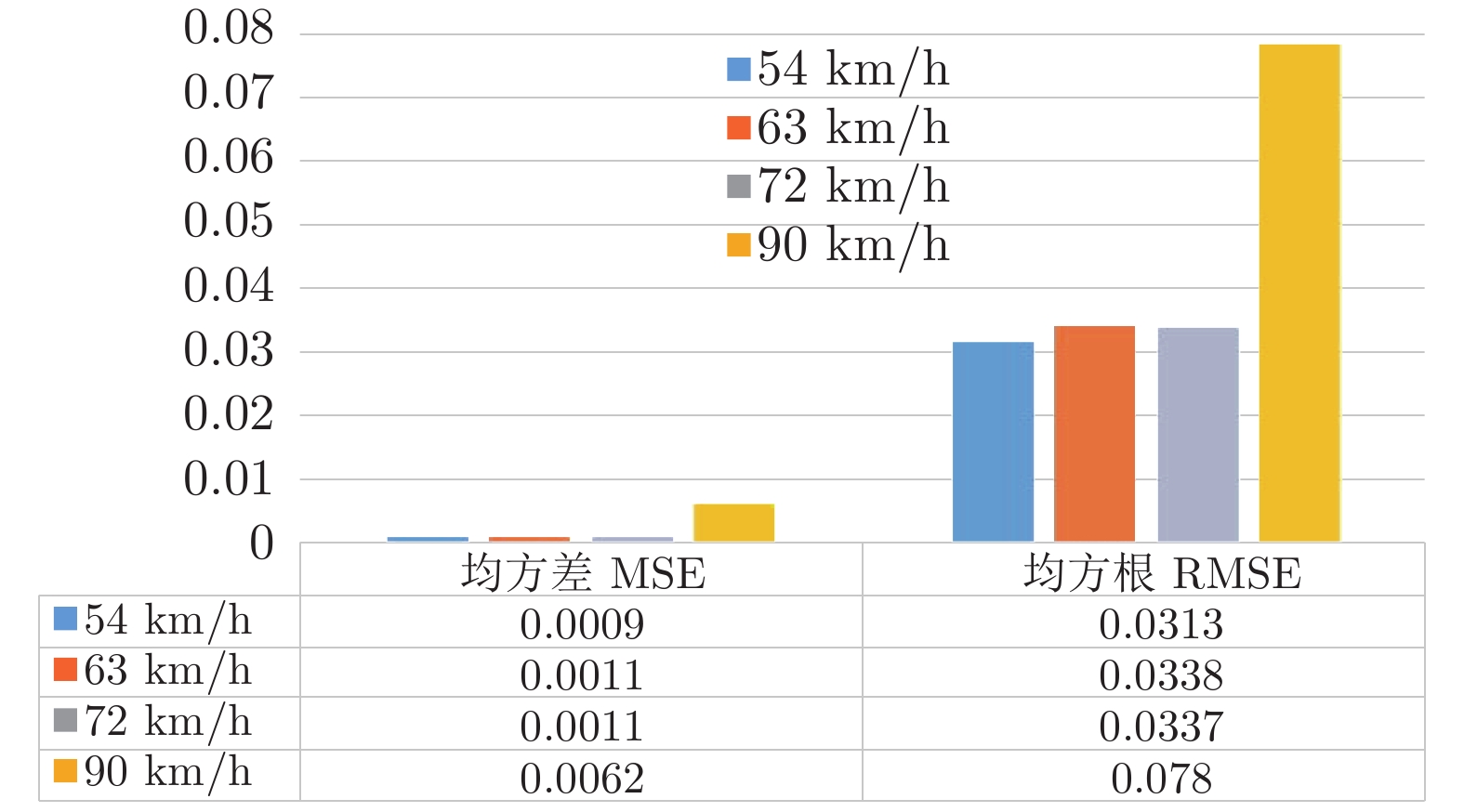
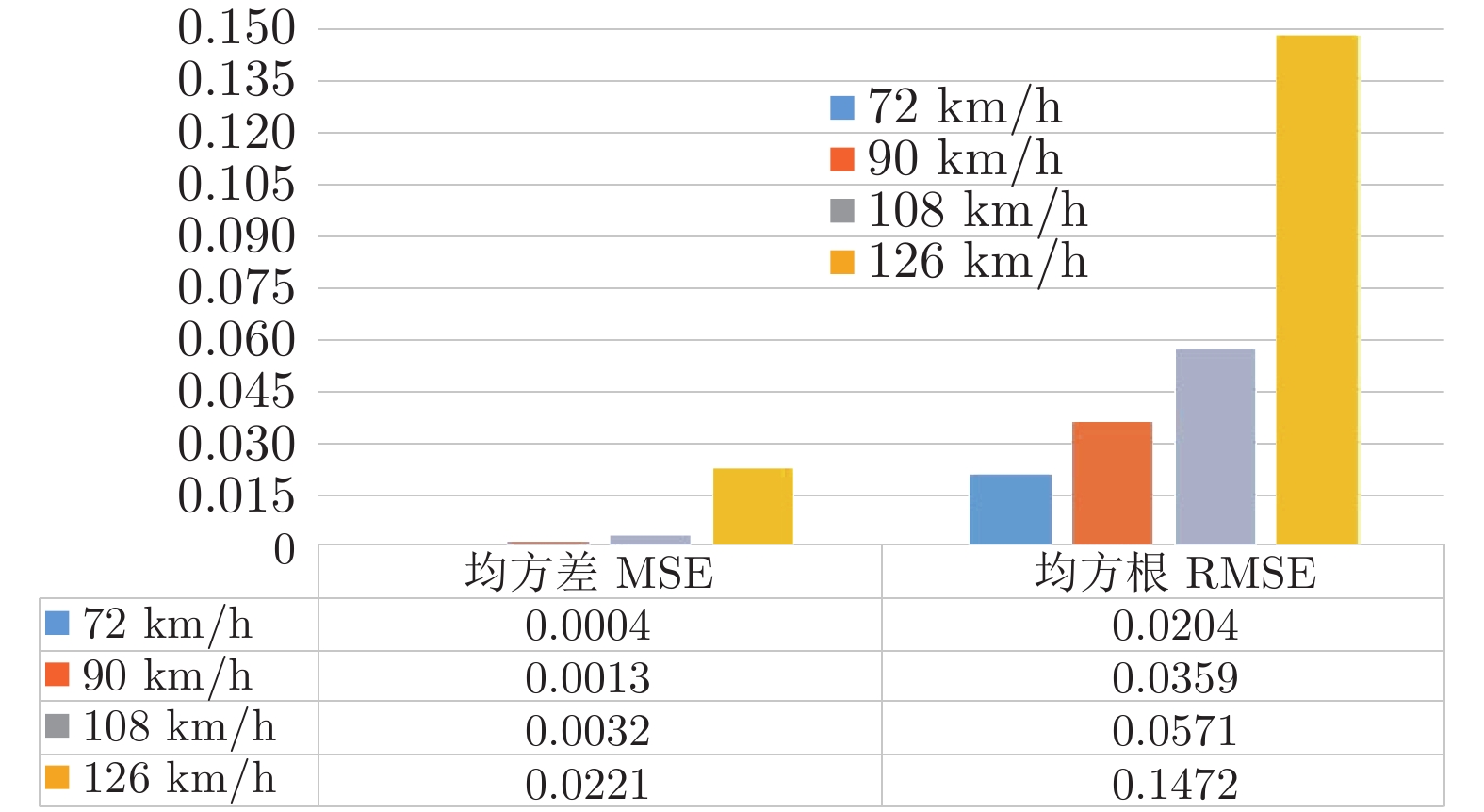
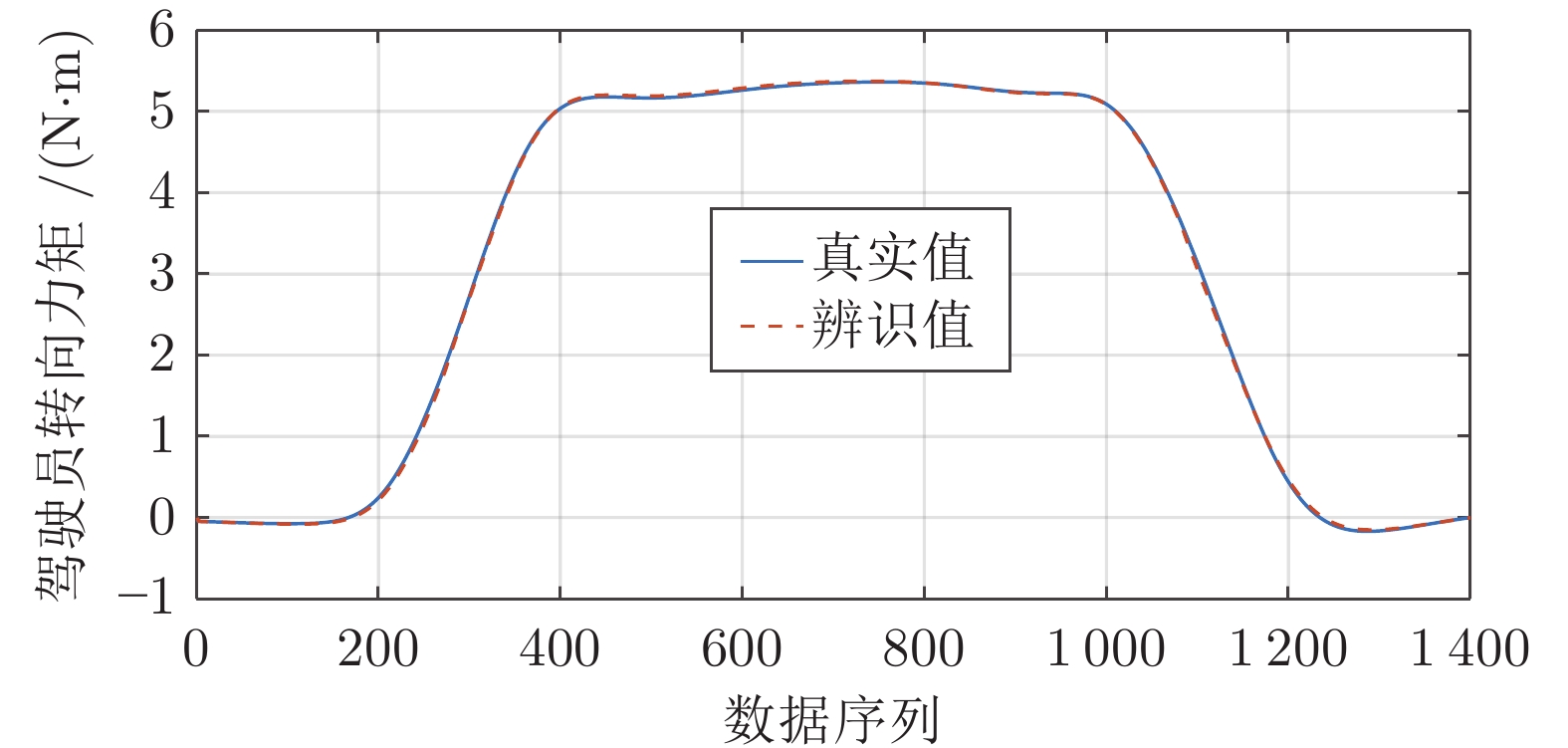
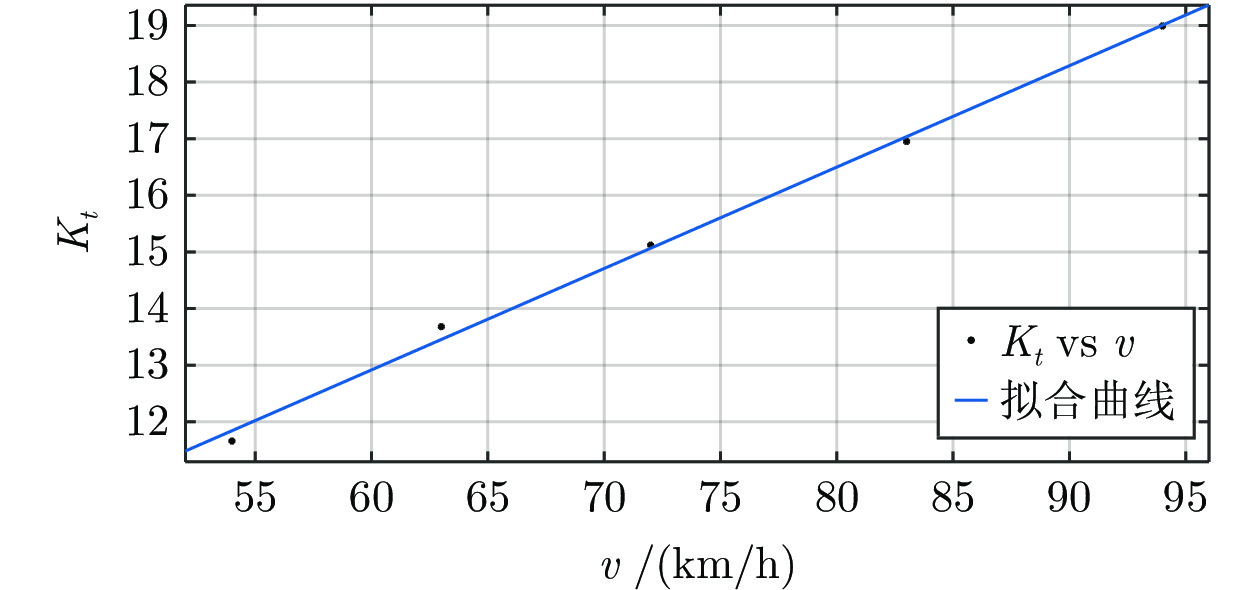
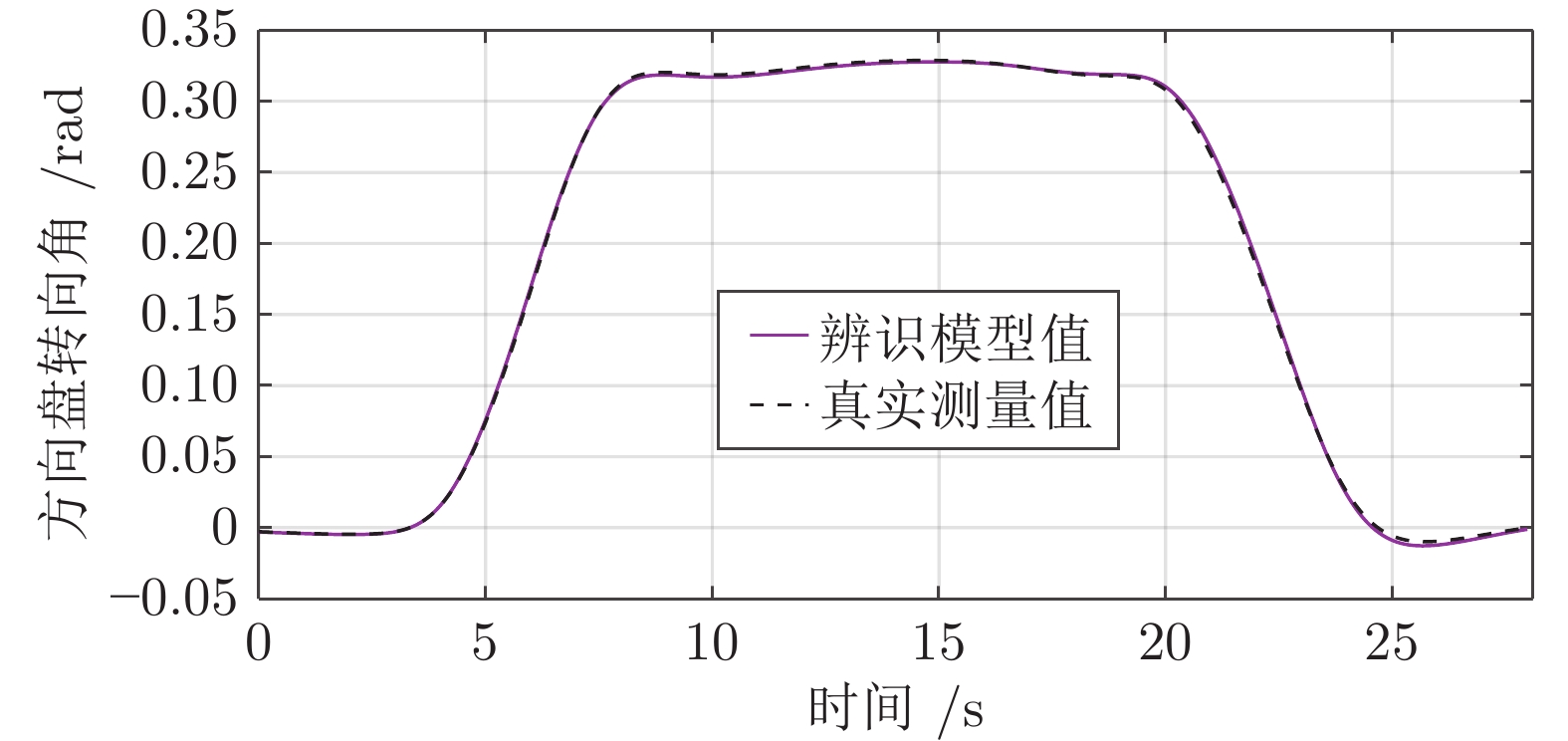
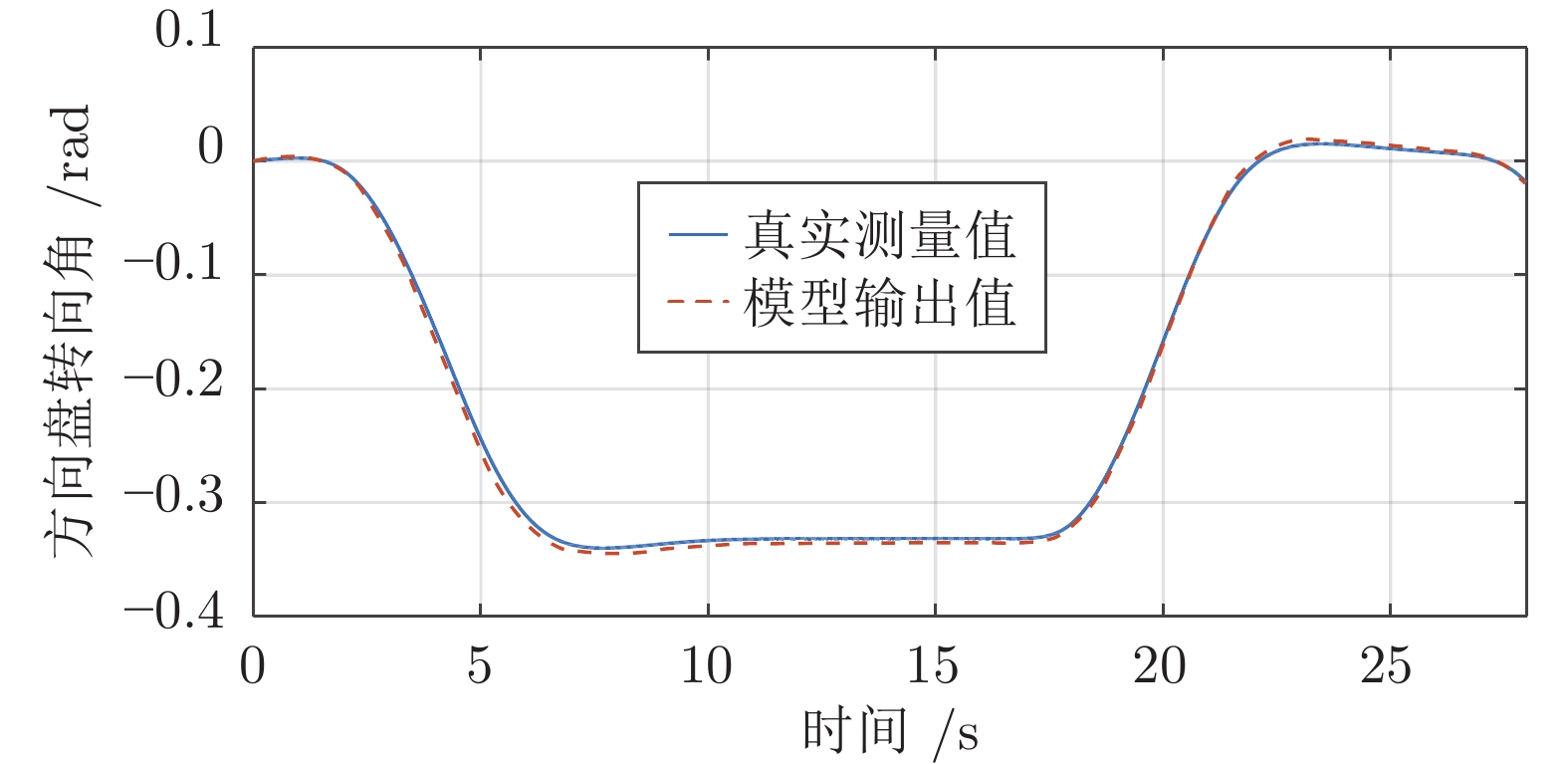
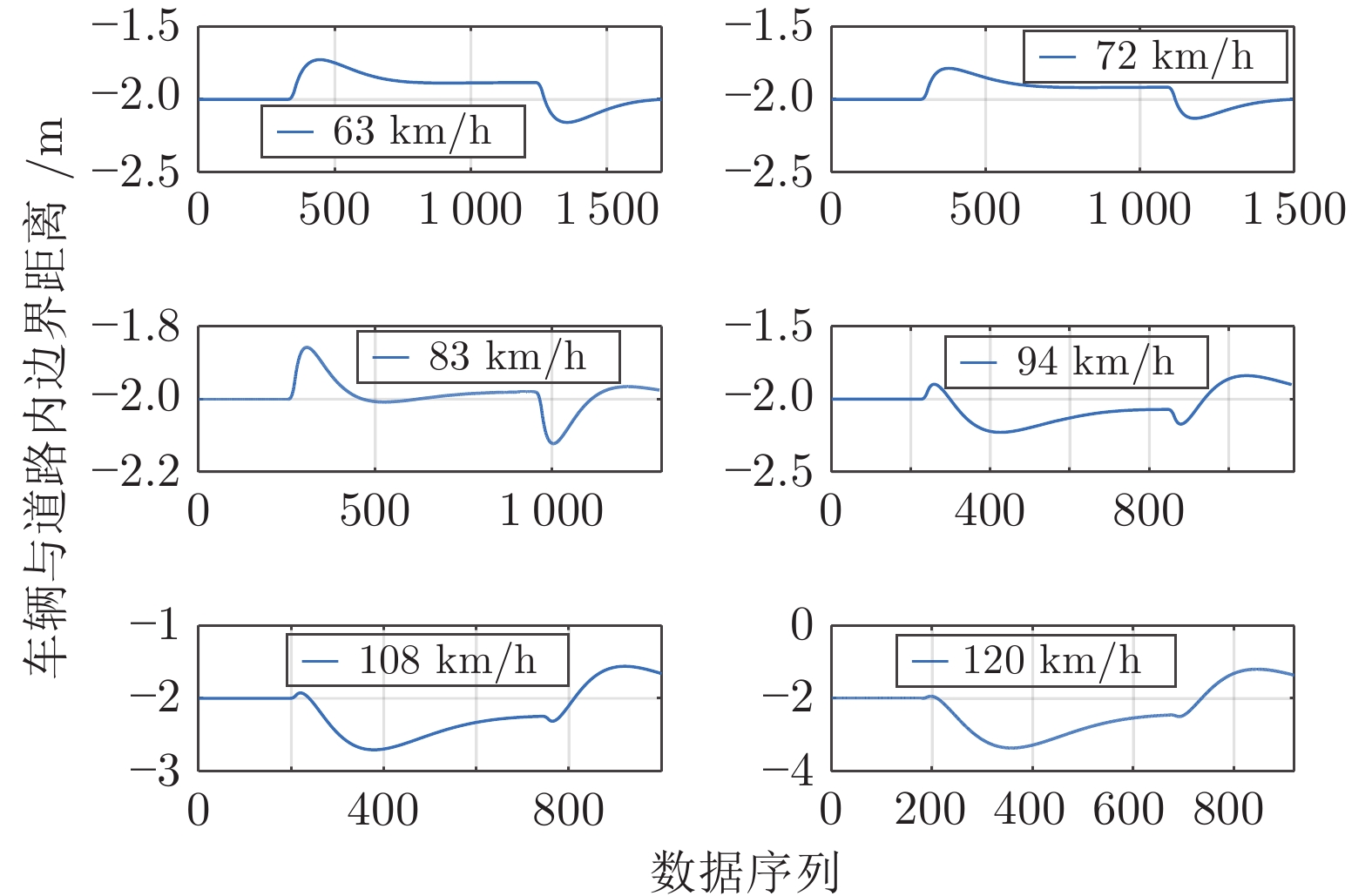
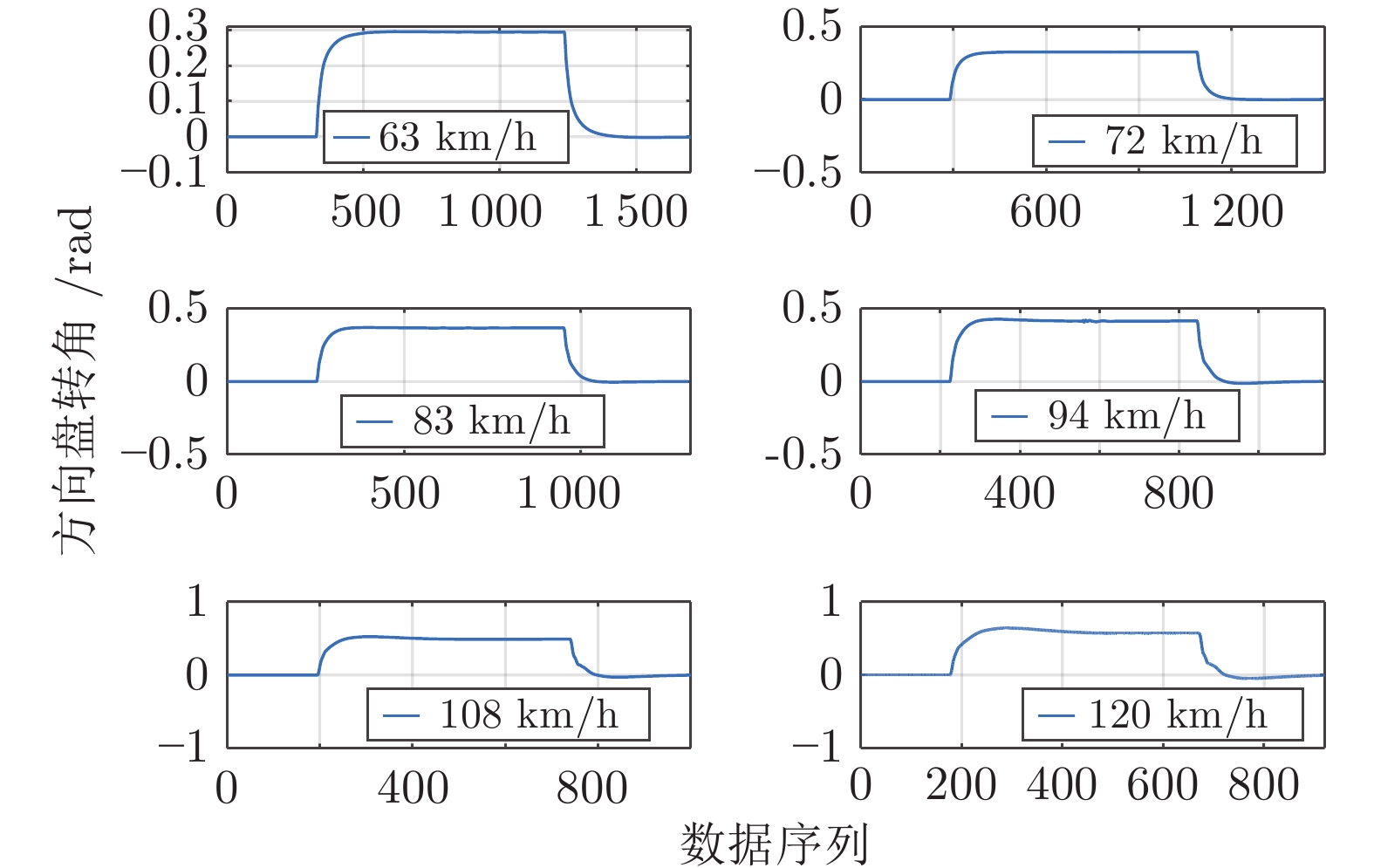
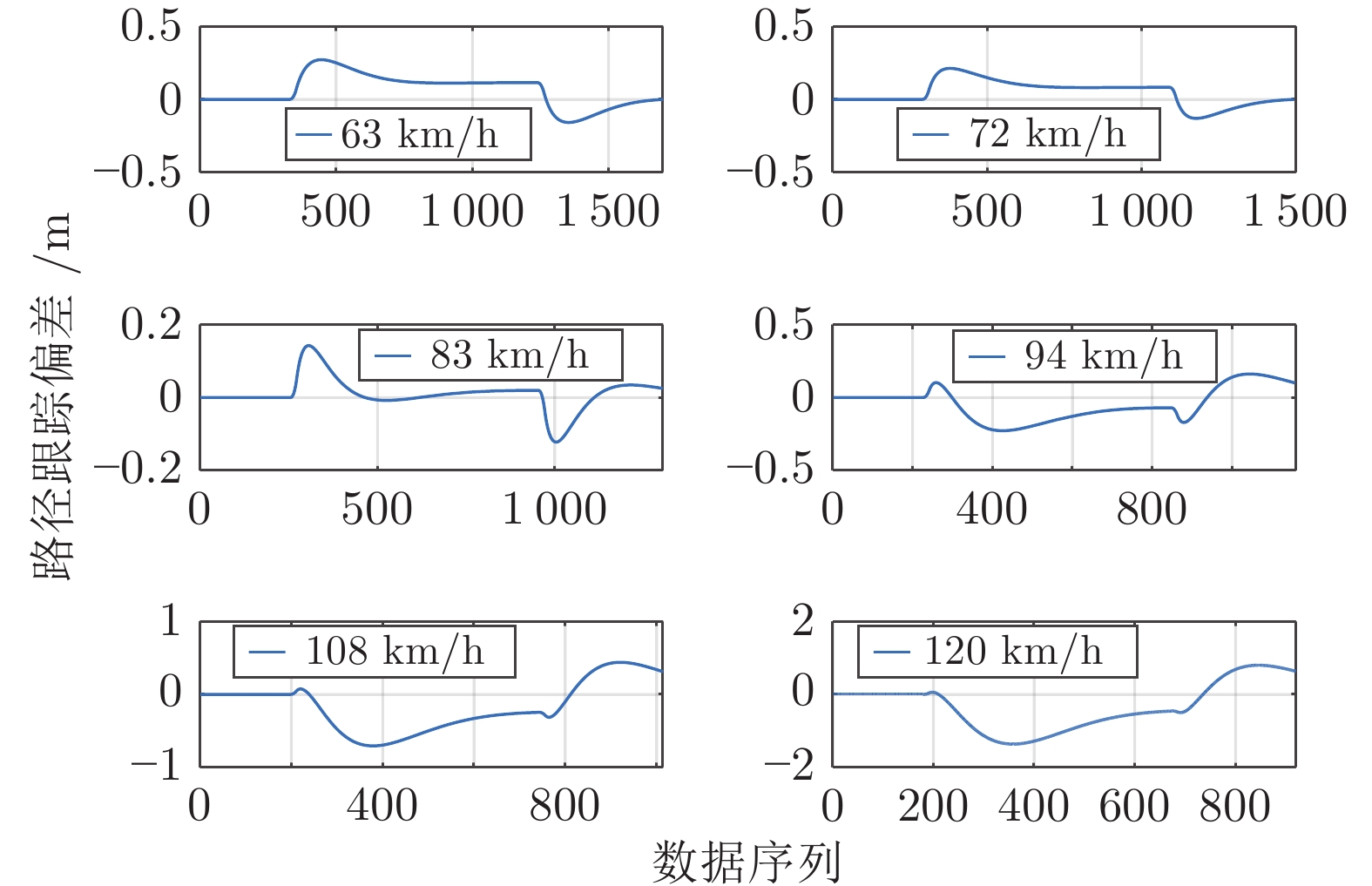
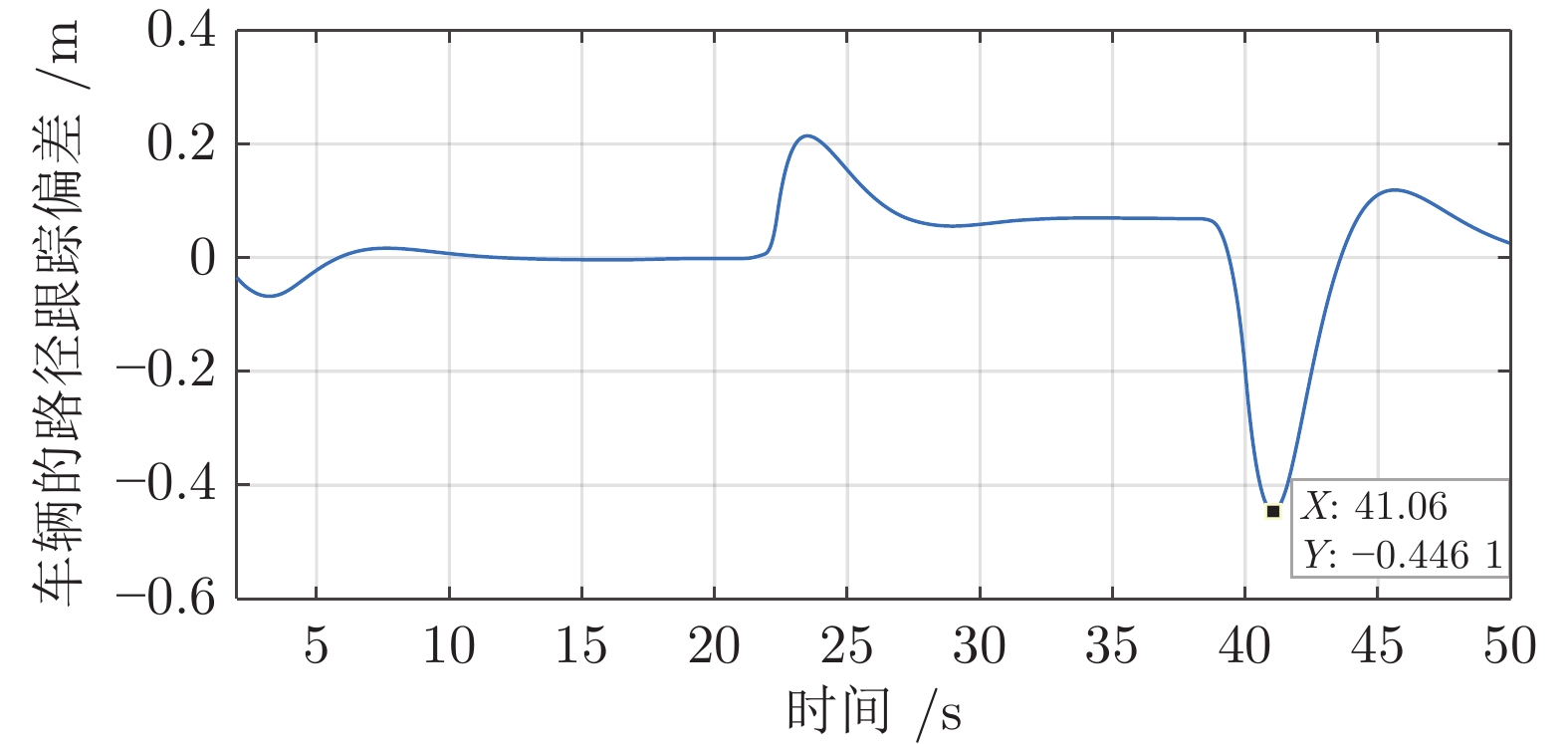
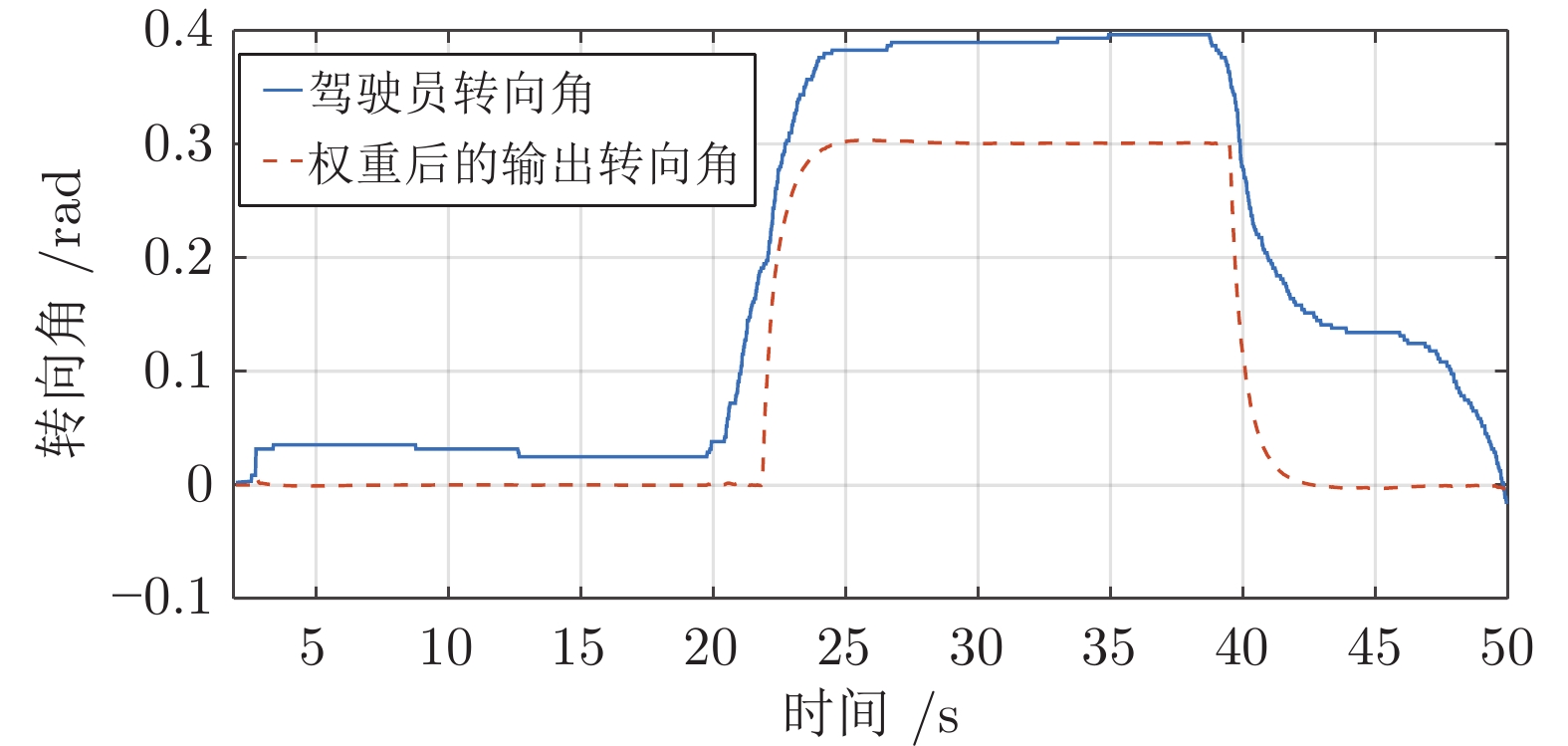
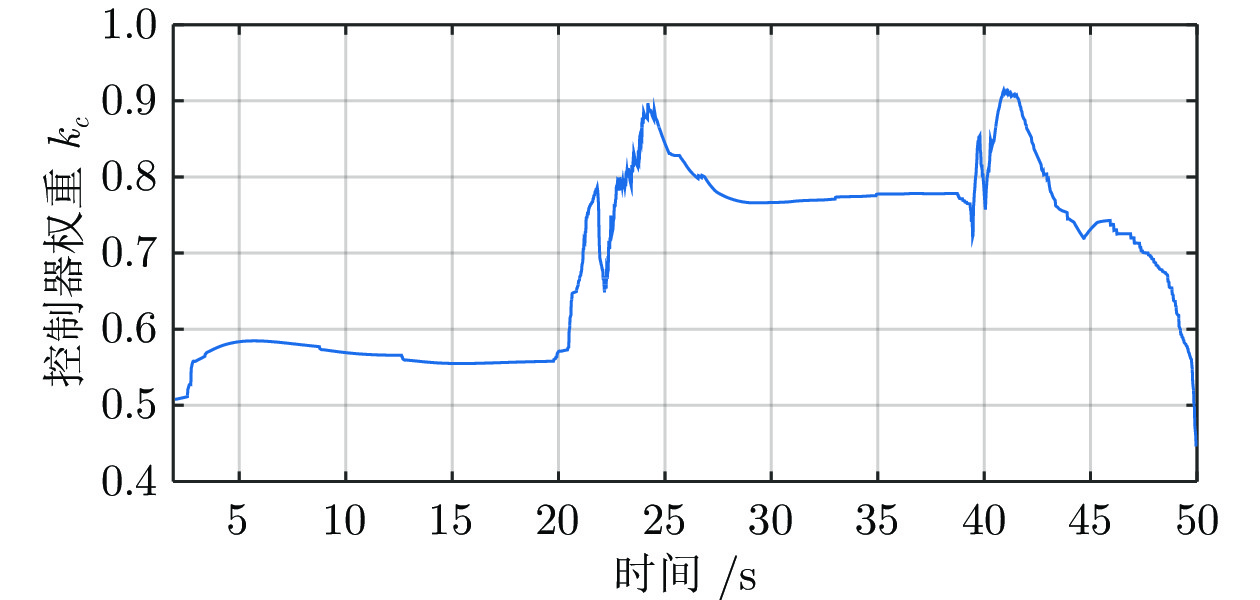
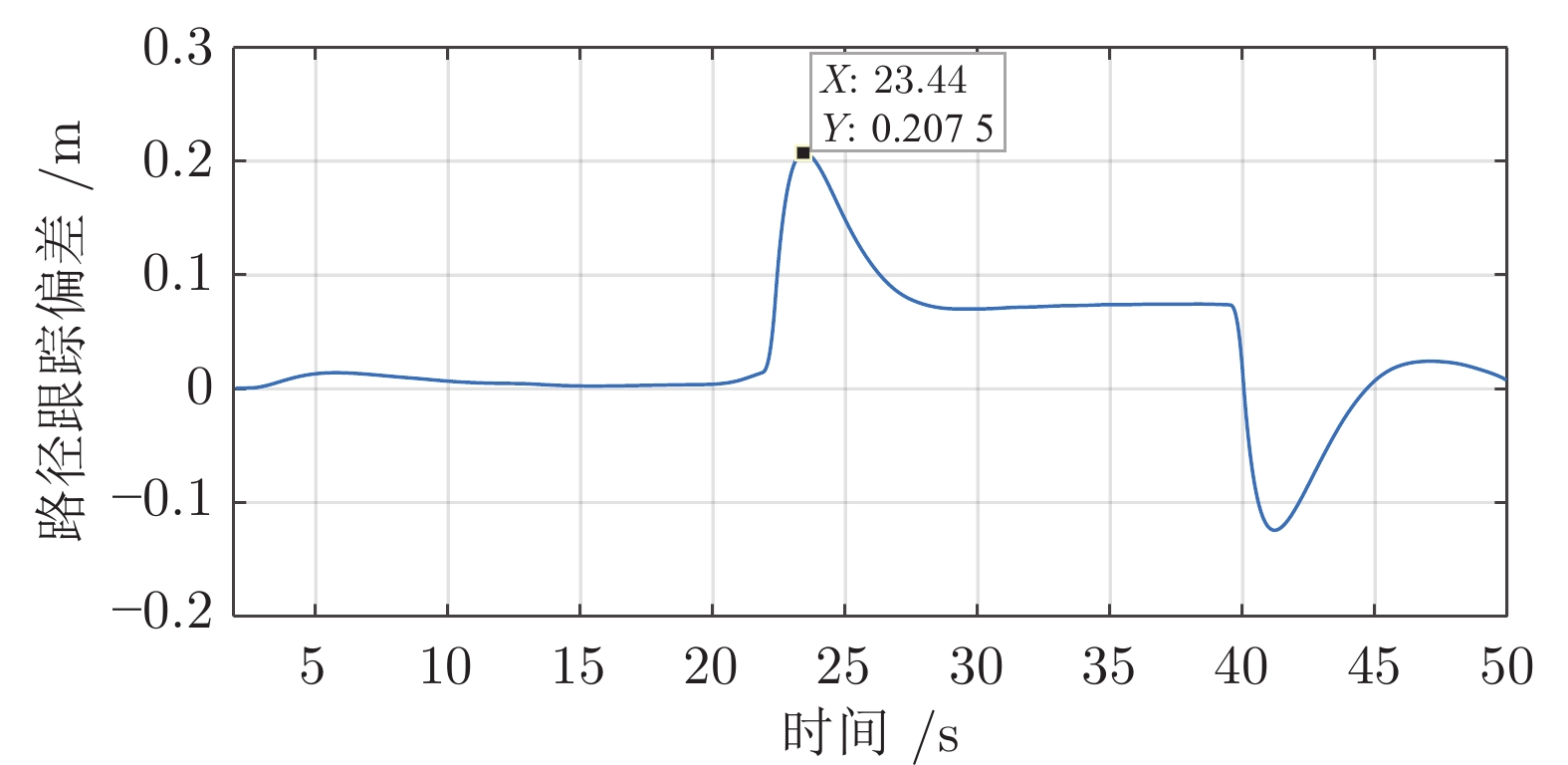
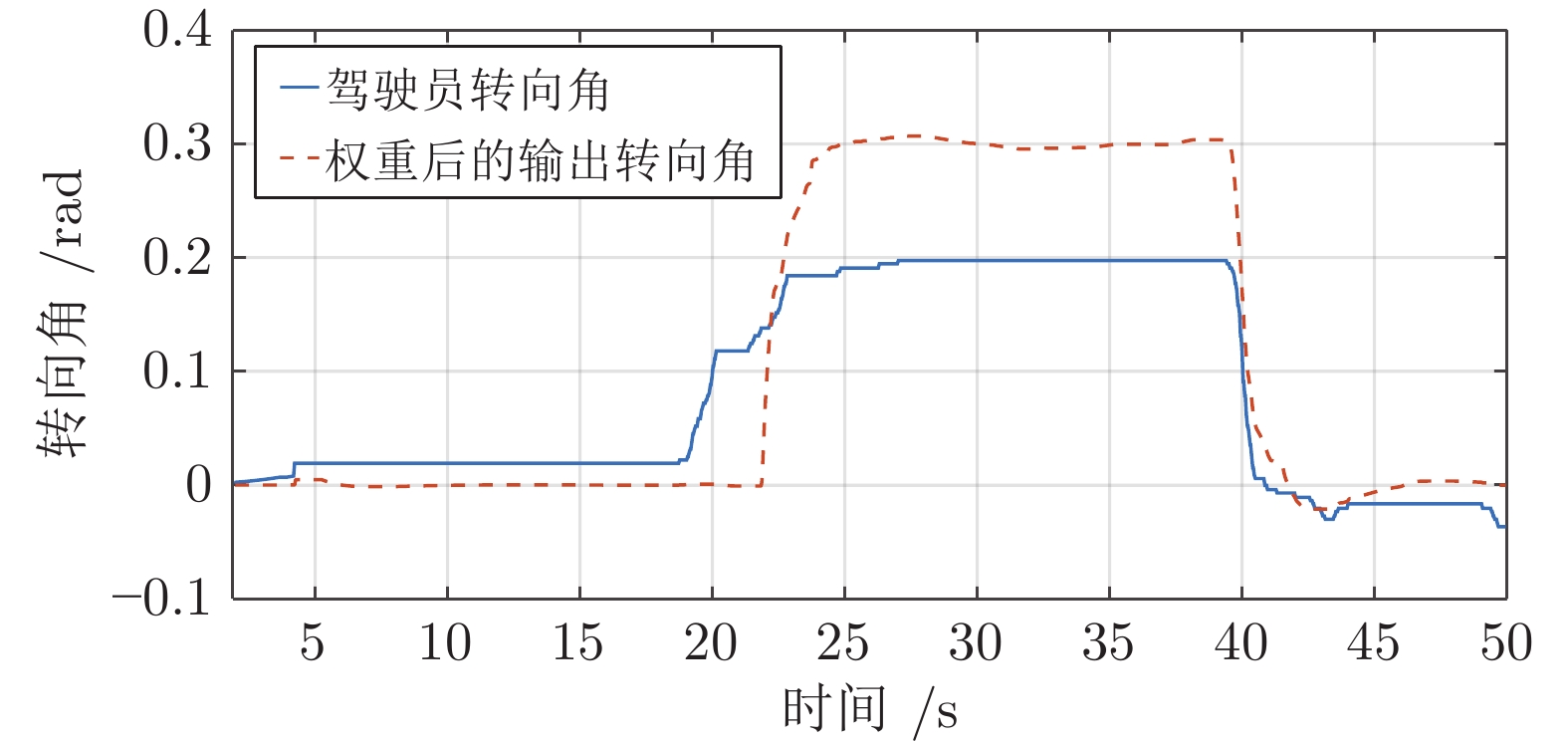
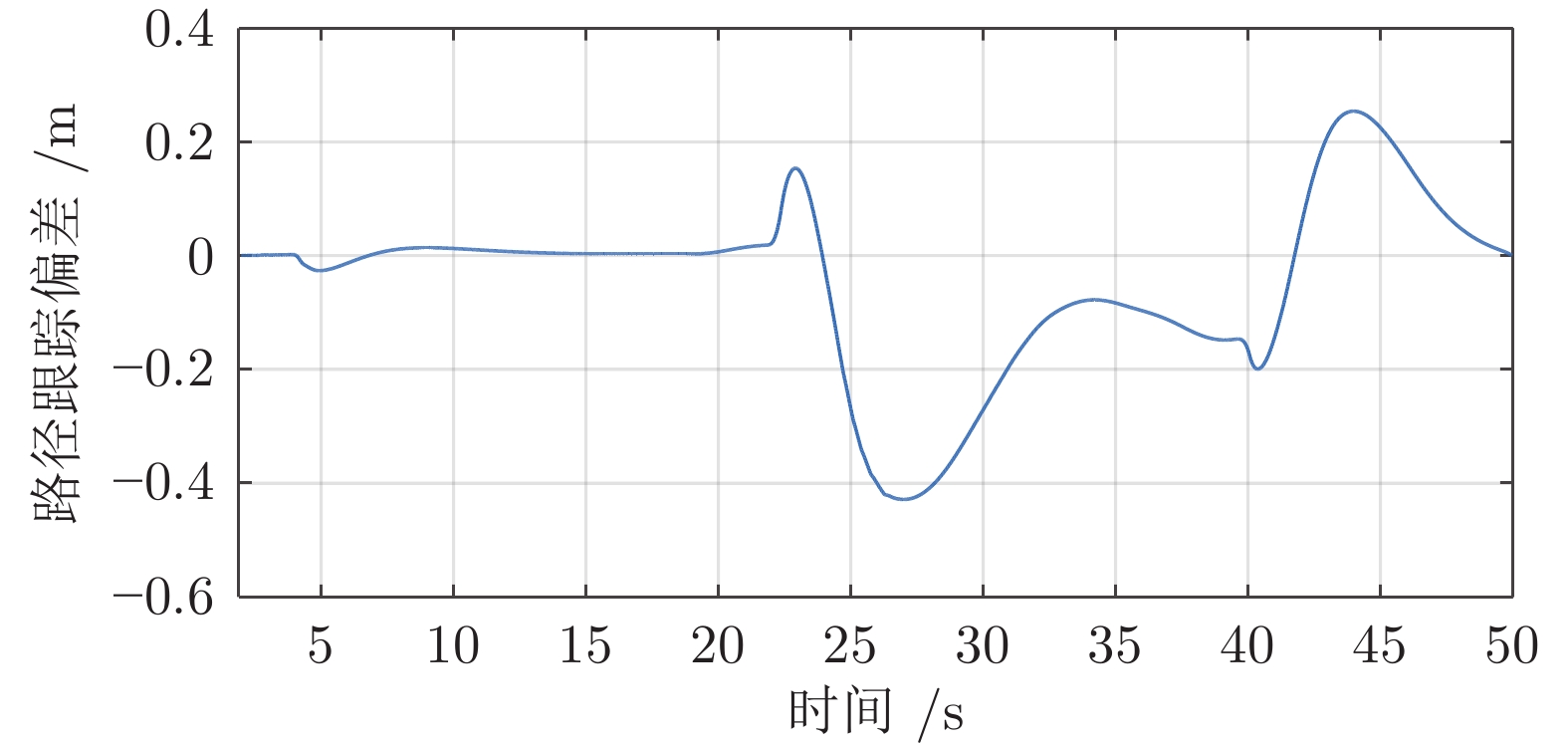
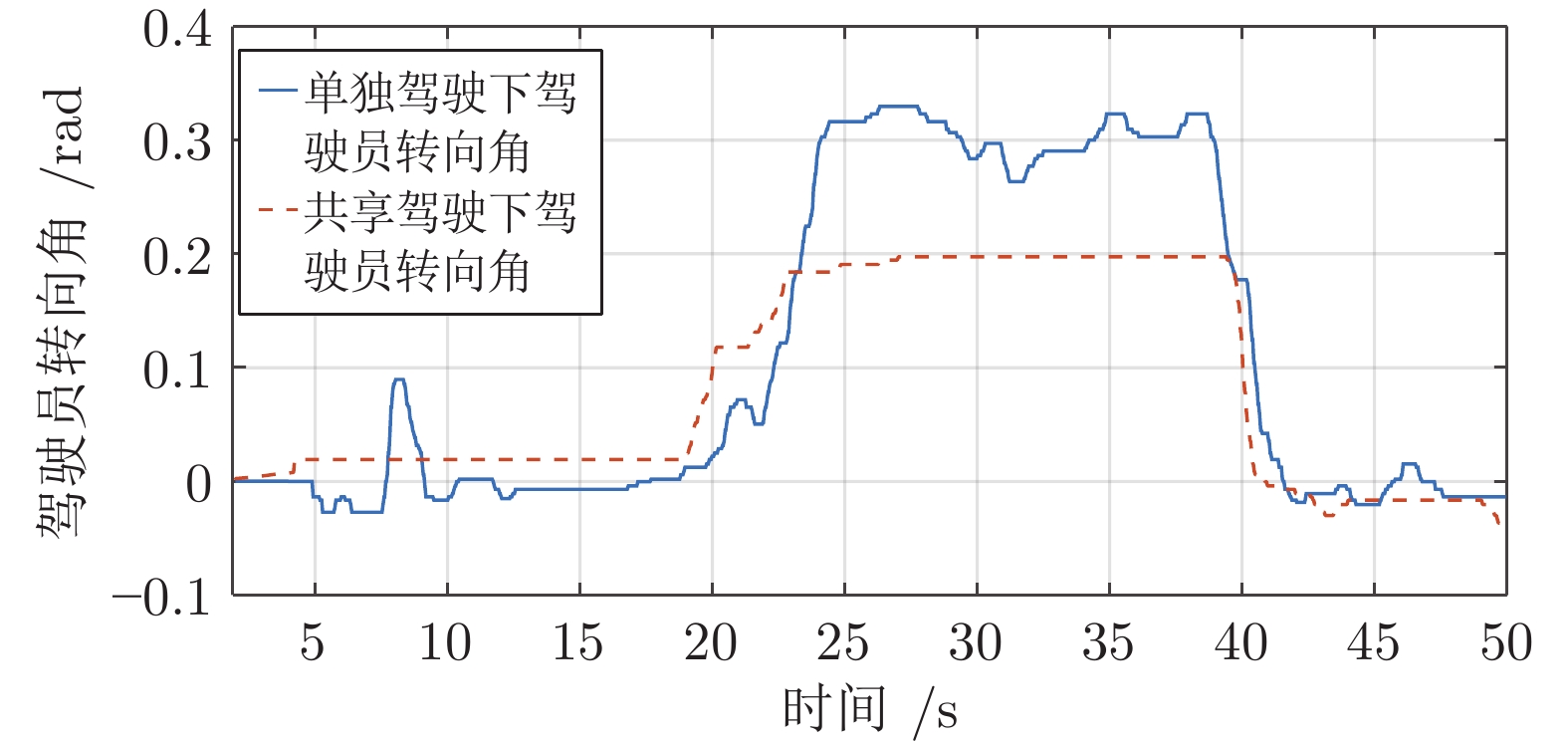
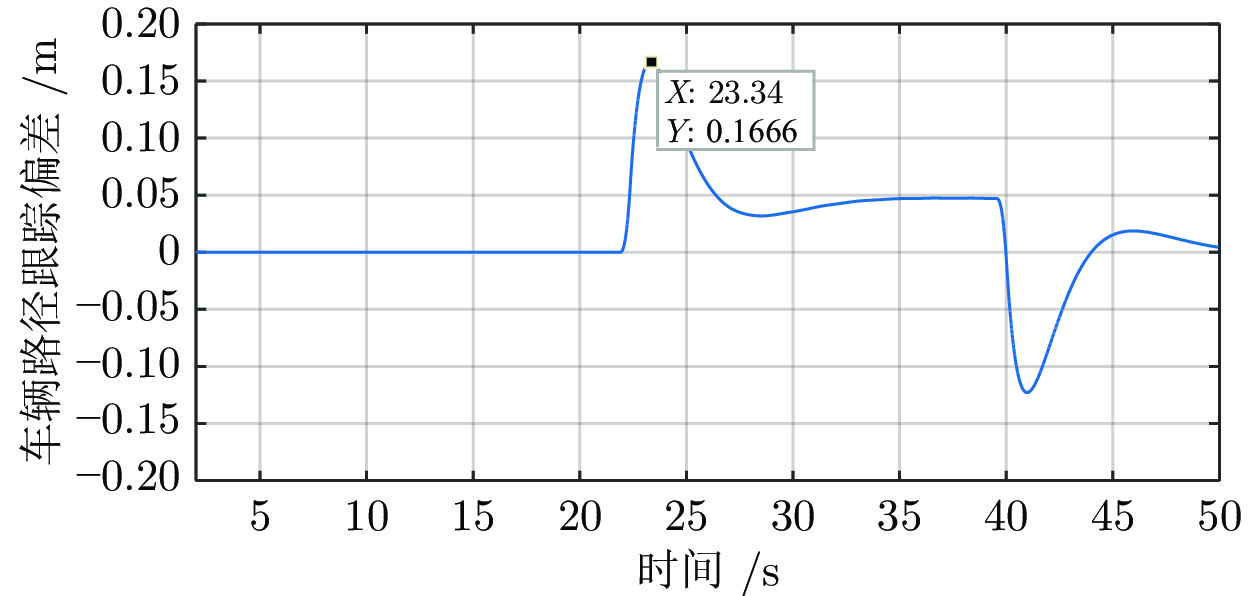
针对车辆驾驶对于共享控制系统实用性的需求, 提出了基于驾驶员转向模型的共享控制系统. 基于驾驶员的视觉预瞄特性与神经肌肉特性建立了驾驶员转向模型, 通过遗传算法辨识模型参数并分析其与车速和道路曲率之间的函数关系; 采用模糊权重分配策略合理分配驾驶权重; 本文利用基于所开发的CarMaker驾驶模拟实验平台, 对系统进行在线测试和验证, 结果表明该系统不仅能够更好地提升车辆的轨迹跟踪精度和安全性, 辅助驾驶员转向, 还能够极大地减轻驾驶员负荷.
针对车辆驾驶对于共享控制系统实用性的需求, 提出了基于驾驶员转向模型的共享控制系统. 基于驾驶员的视觉预瞄特性与神经肌肉特性建立了驾驶员转向模型, 通过遗传算法辨识模型参数并分析其与车速和道路曲率之间的函数关系; 采用模糊权重分配策略合理分配驾驶权重; 本文利用基于所开发的CarMaker驾驶模拟实验平台, 对系统进行在线测试和验证, 结果表明该系统不仅能够更好地提升车辆的轨迹跟踪精度和安全性, 辅助驾驶员转向, 还能够极大地减轻驾驶员负荷.











2022, 48(7): 1678-1689.
doi: 10.16383/j.aas.c190477
摘要:
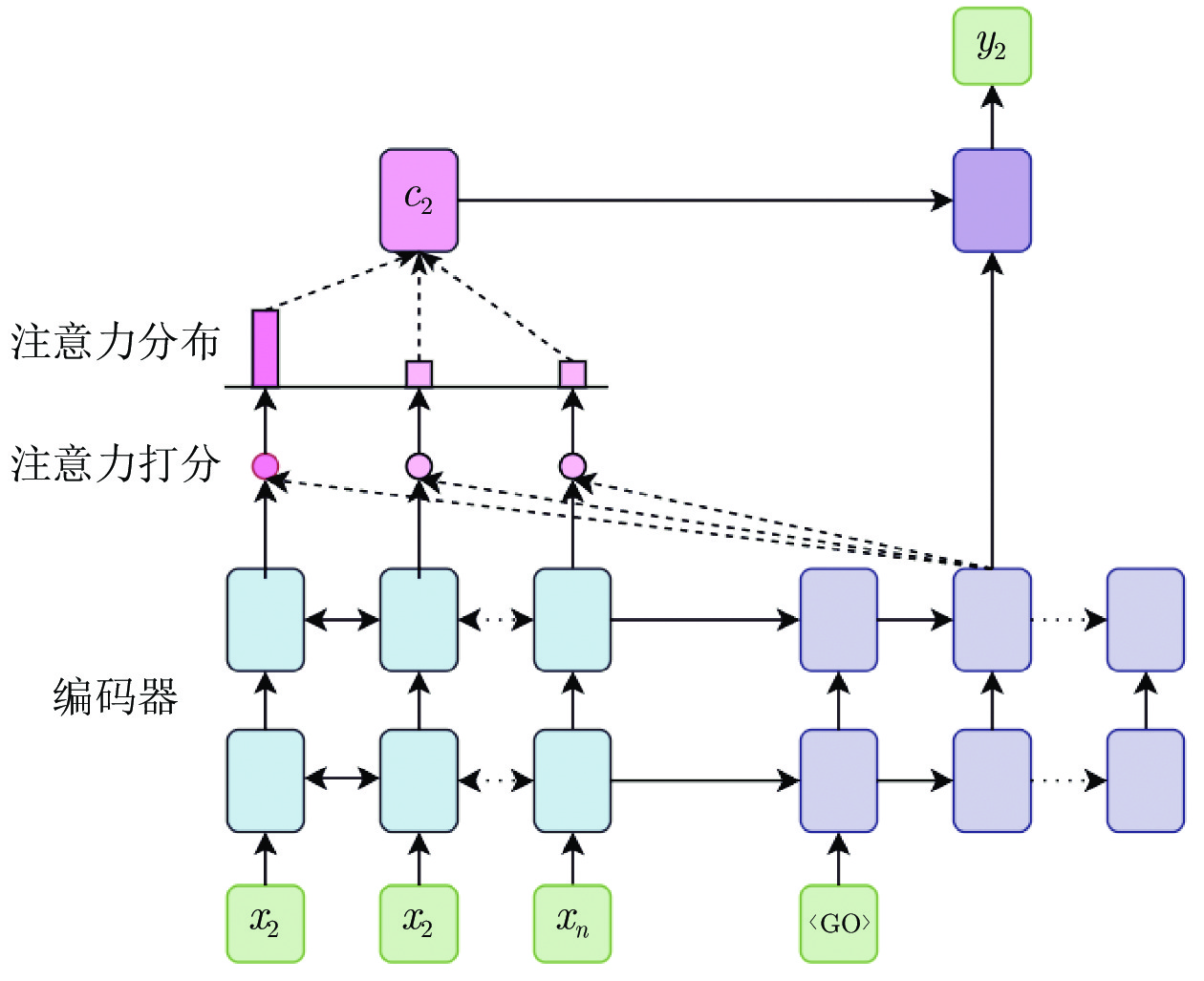
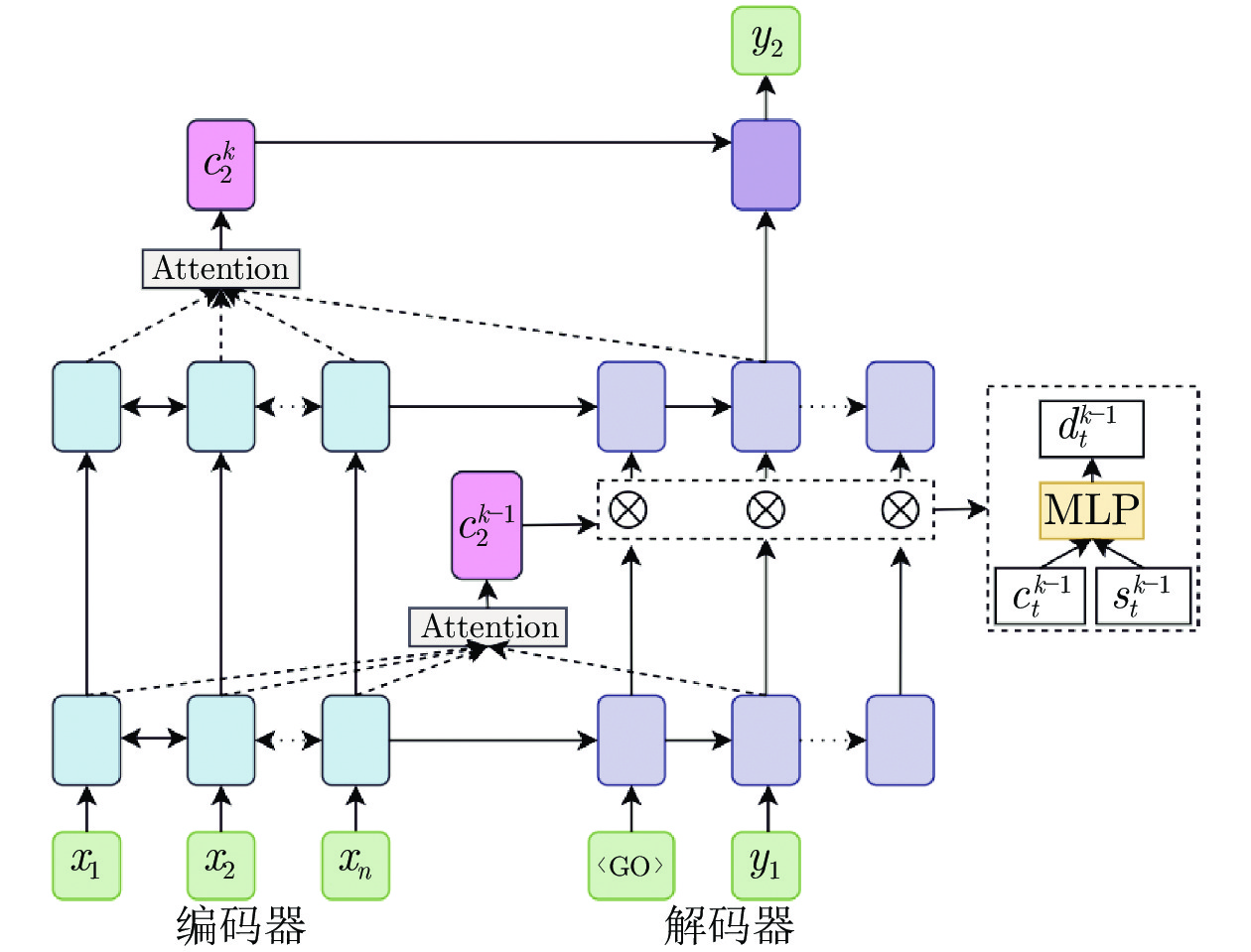
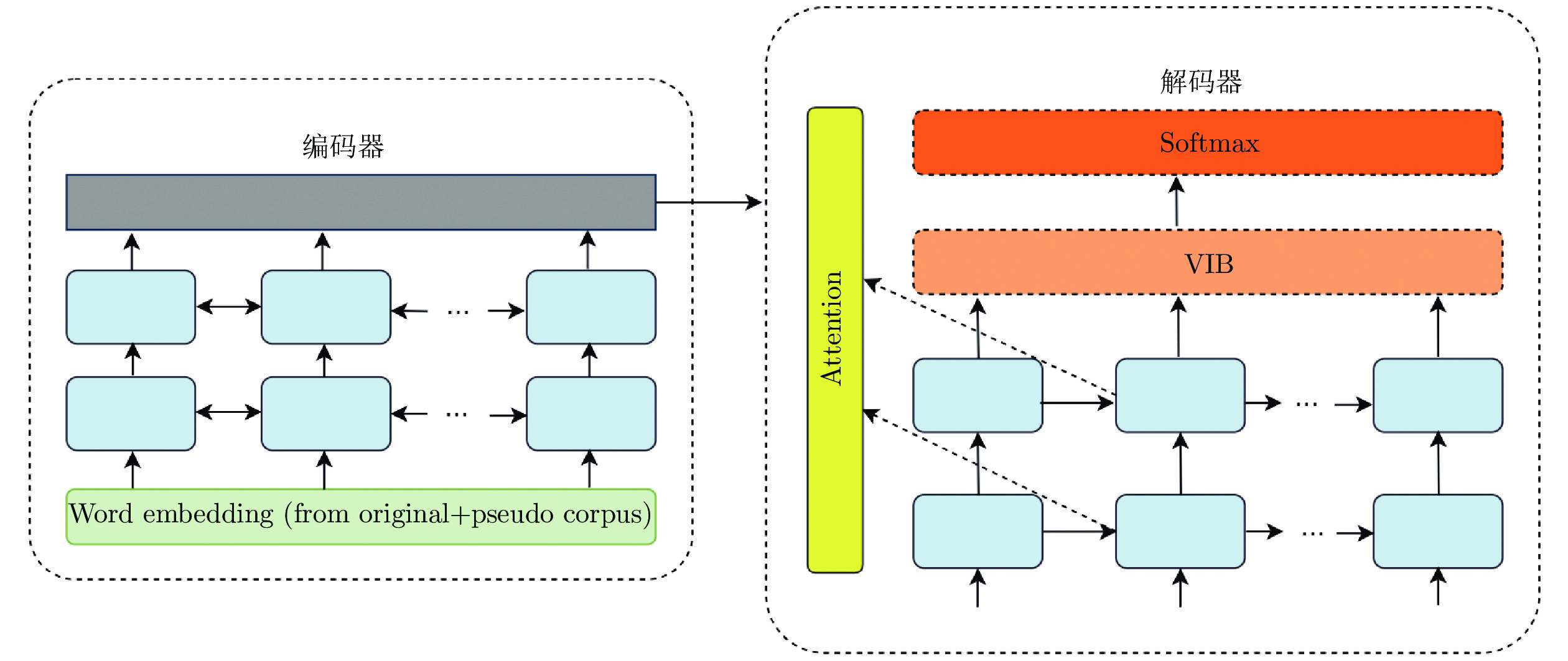
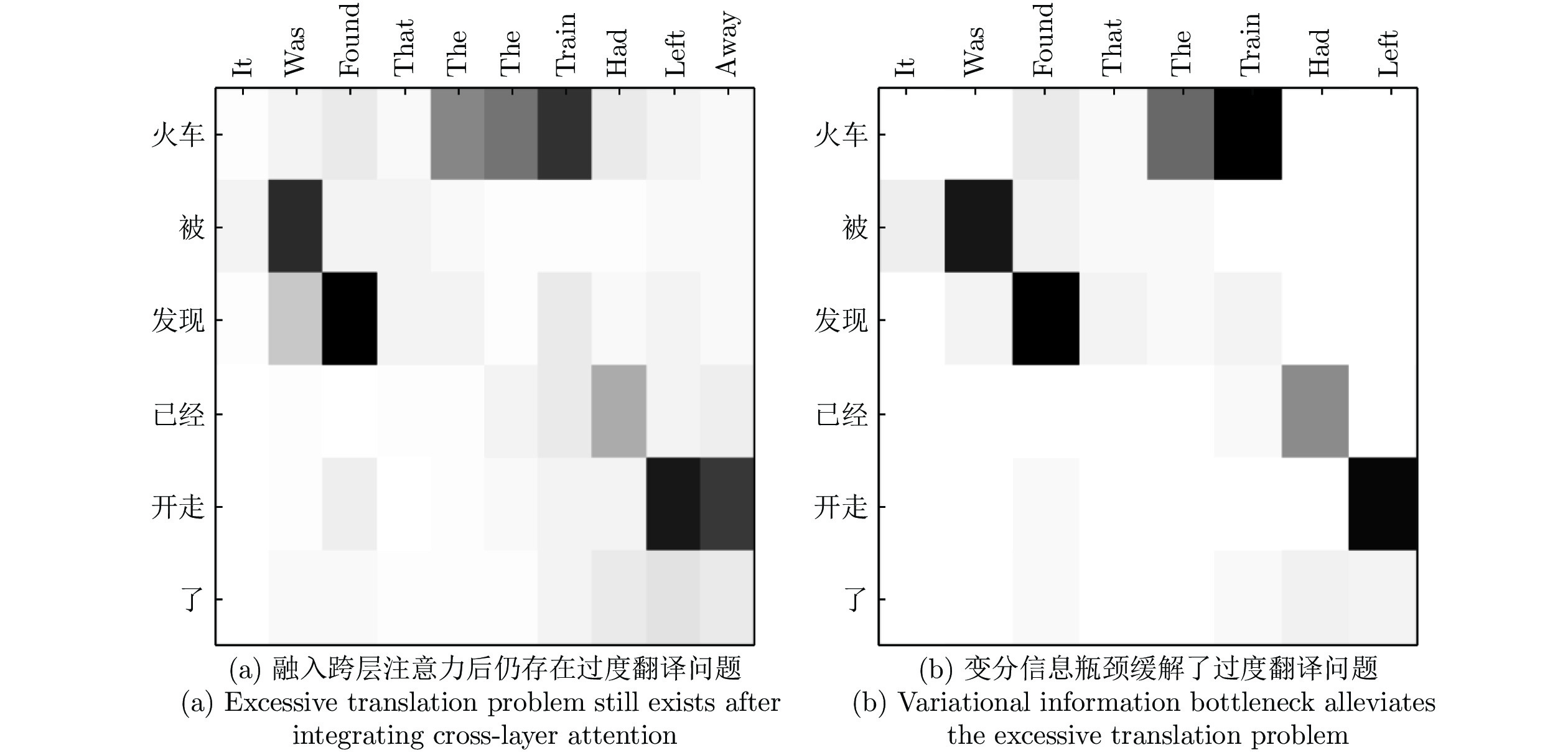
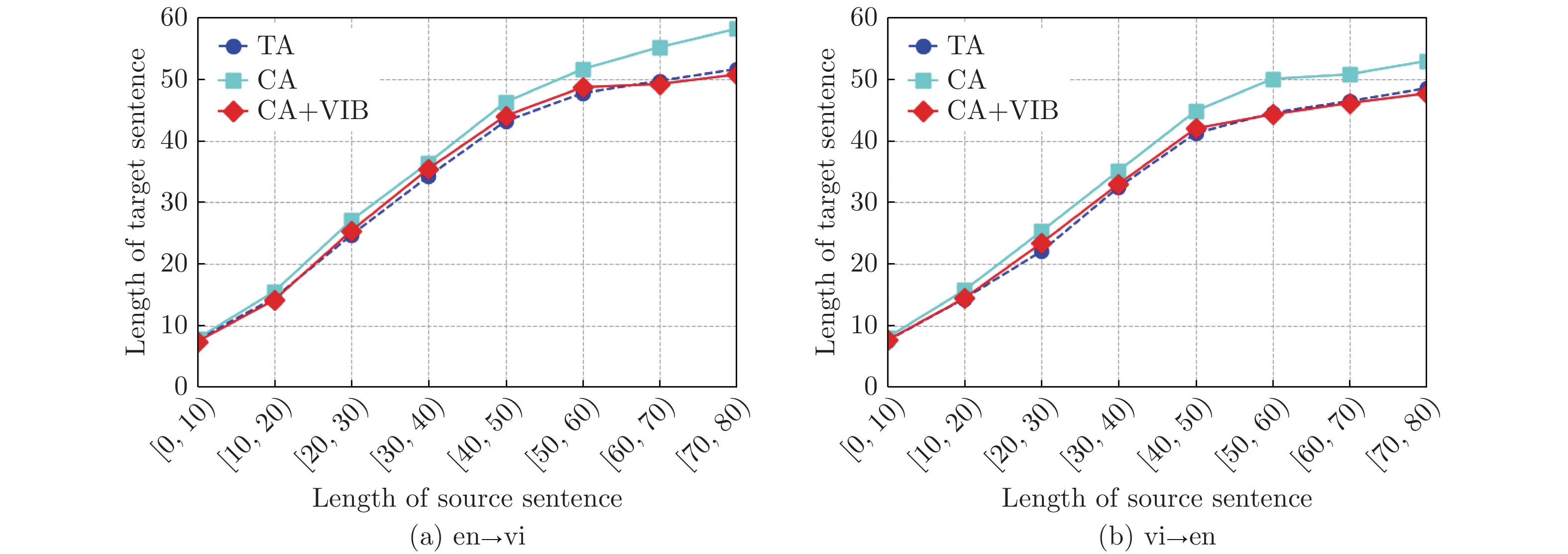
变分方法是机器翻译领域的有效方法, 其性能较依赖于数据量规模. 然而在低资源环境下, 平行语料资源匮乏, 不能满足变分方法对数据量的需求, 因此导致基于变分的模型翻译效果并不理想. 针对该问题, 本文提出基于变分信息瓶颈的半监督神经机器翻译方法, 所提方法的具体思路为: 首先在小规模平行语料的基础上, 通过引入跨层注意力机制充分利用神经网络各层特征信息, 训练得到基础翻译模型; 随后, 利用基础翻译模型, 使用回译方法从单语语料生成含噪声的大规模伪平行语料, 对两种平行语料进行合并形成组合语料, 使其在规模上能够满足变分方法对数据量的需求; 最后, 为了减少组合语料中的噪声, 利用变分信息瓶颈方法在源与目标之间添加中间表征, 通过训练使该表征具有放行重要信息、阻止非重要信息流过的能力, 从而达到去除噪声的效果. 多个数据集上的实验结果表明, 本文所提方法能够显著地提高译文质量, 是一种适用于低资源场景的半监督神经机器翻译方法.
变分方法是机器翻译领域的有效方法, 其性能较依赖于数据量规模. 然而在低资源环境下, 平行语料资源匮乏, 不能满足变分方法对数据量的需求, 因此导致基于变分的模型翻译效果并不理想. 针对该问题, 本文提出基于变分信息瓶颈的半监督神经机器翻译方法, 所提方法的具体思路为: 首先在小规模平行语料的基础上, 通过引入跨层注意力机制充分利用神经网络各层特征信息, 训练得到基础翻译模型; 随后, 利用基础翻译模型, 使用回译方法从单语语料生成含噪声的大规模伪平行语料, 对两种平行语料进行合并形成组合语料, 使其在规模上能够满足变分方法对数据量的需求; 最后, 为了减少组合语料中的噪声, 利用变分信息瓶颈方法在源与目标之间添加中间表征, 通过训练使该表征具有放行重要信息、阻止非重要信息流过的能力, 从而达到去除噪声的效果. 多个数据集上的实验结果表明, 本文所提方法能够显著地提高译文质量, 是一种适用于低资源场景的半监督神经机器翻译方法.


2022, 48(7): 1690-1703.
doi: 10.16383/j.aas.c210852
摘要:
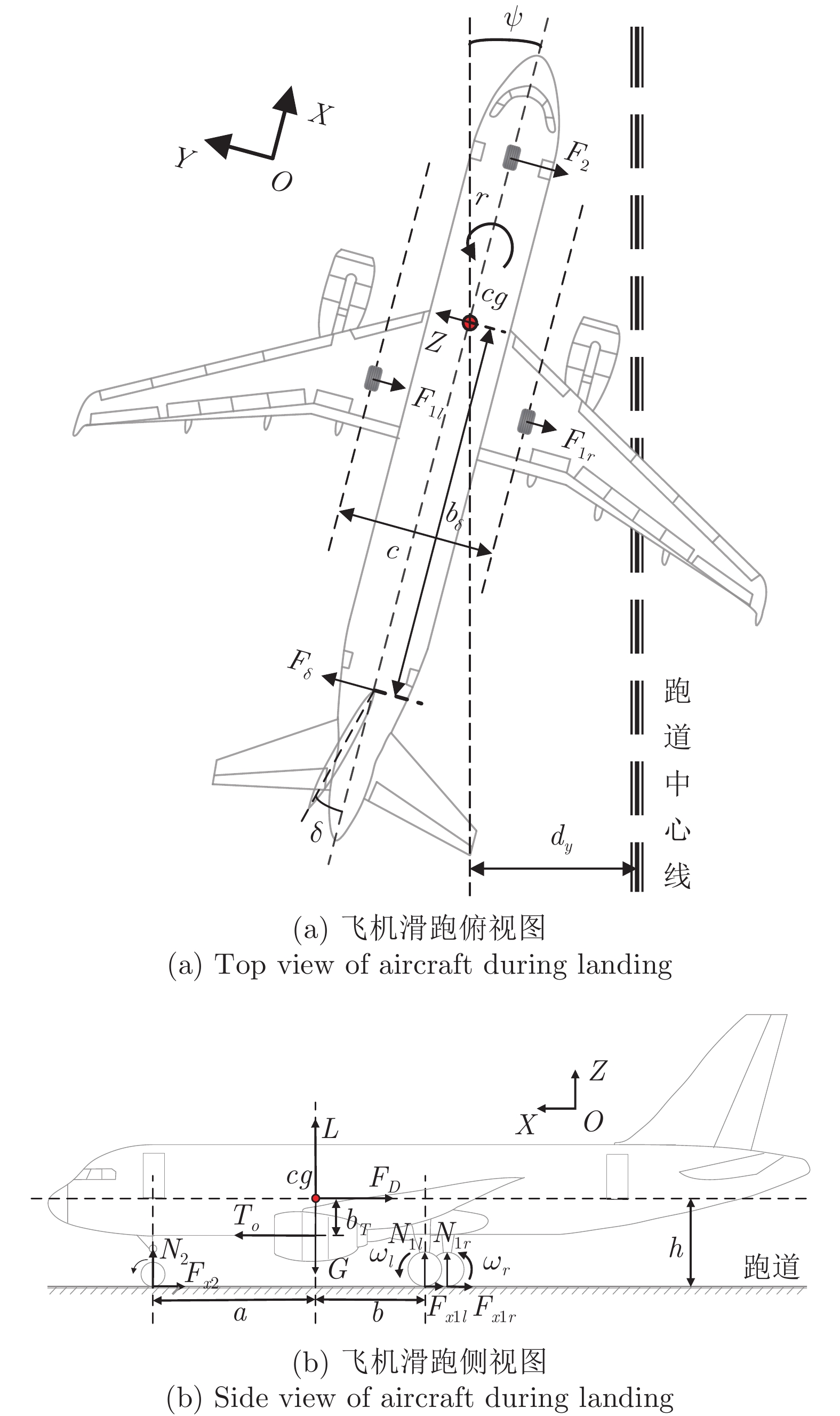
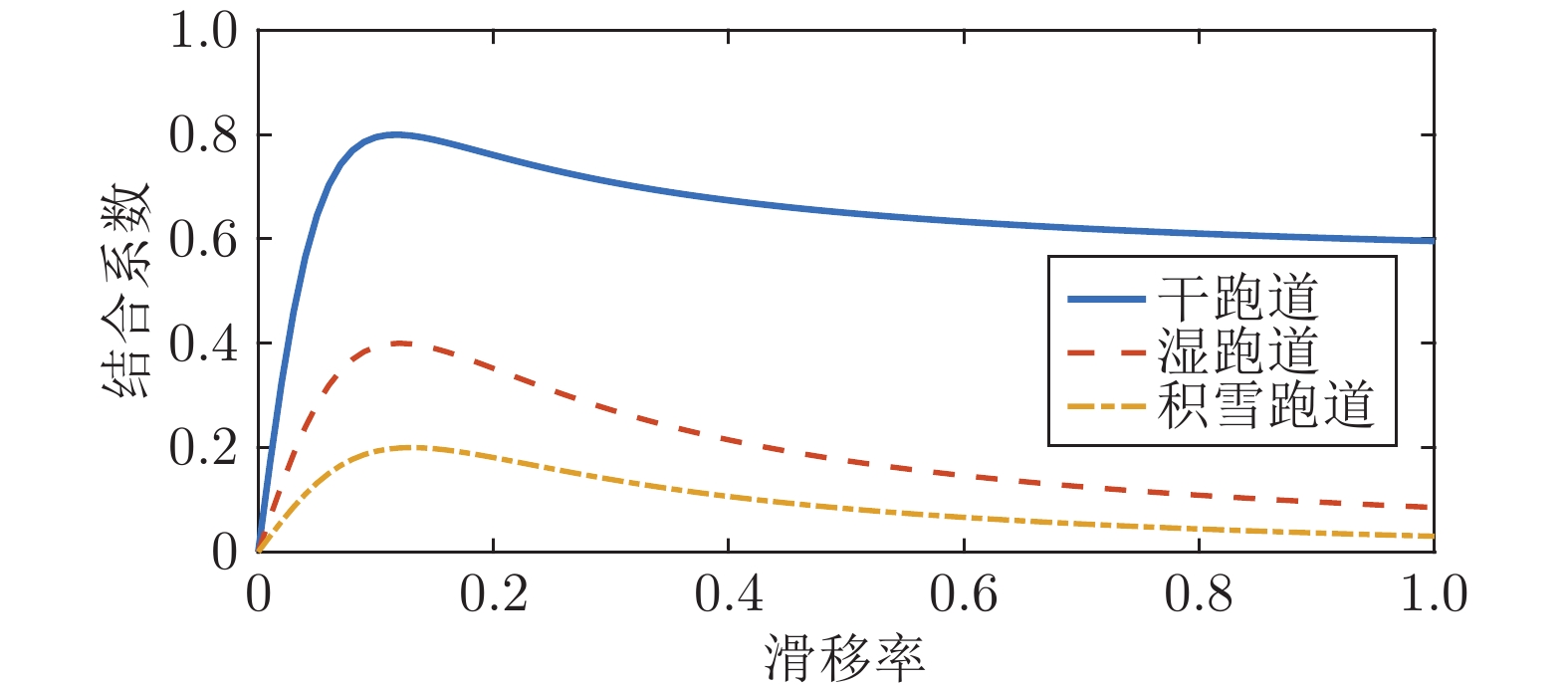
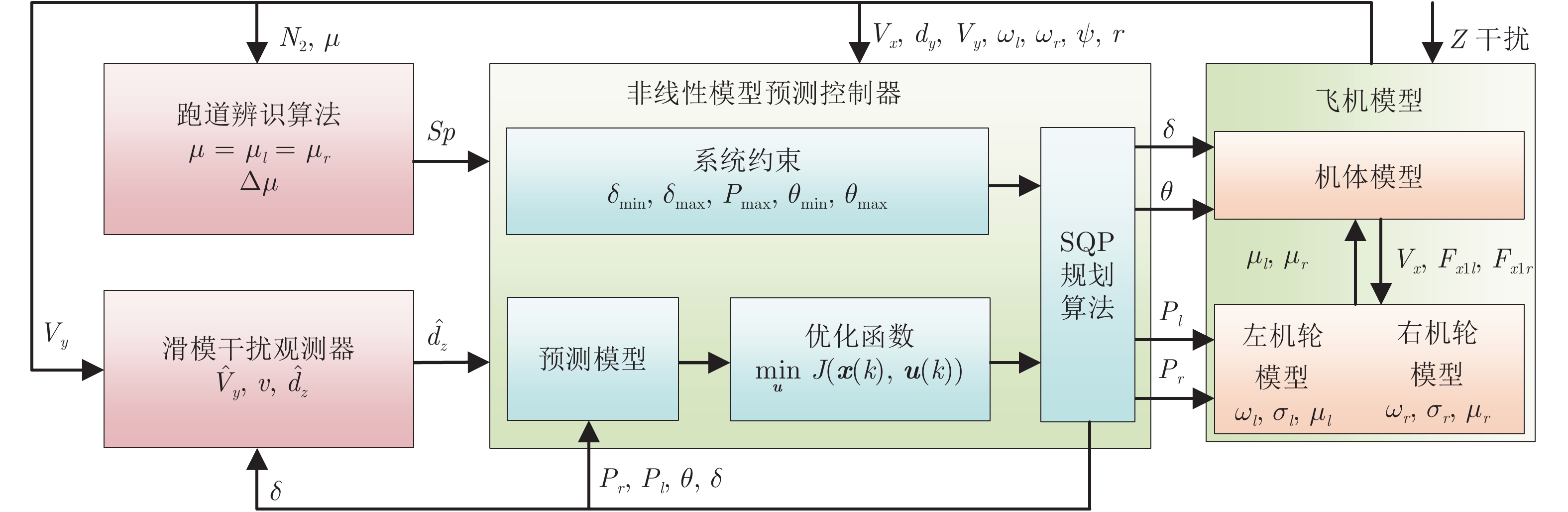
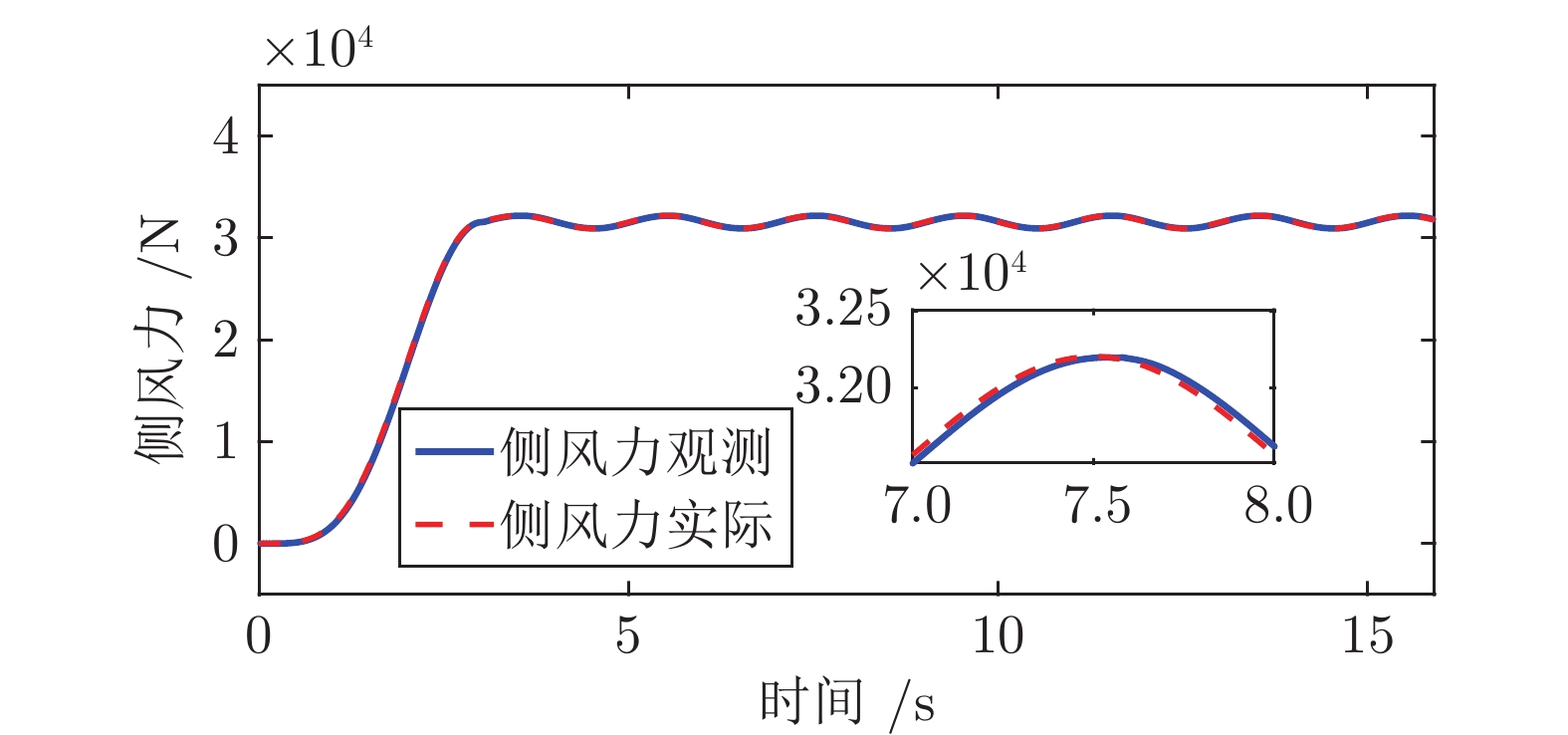
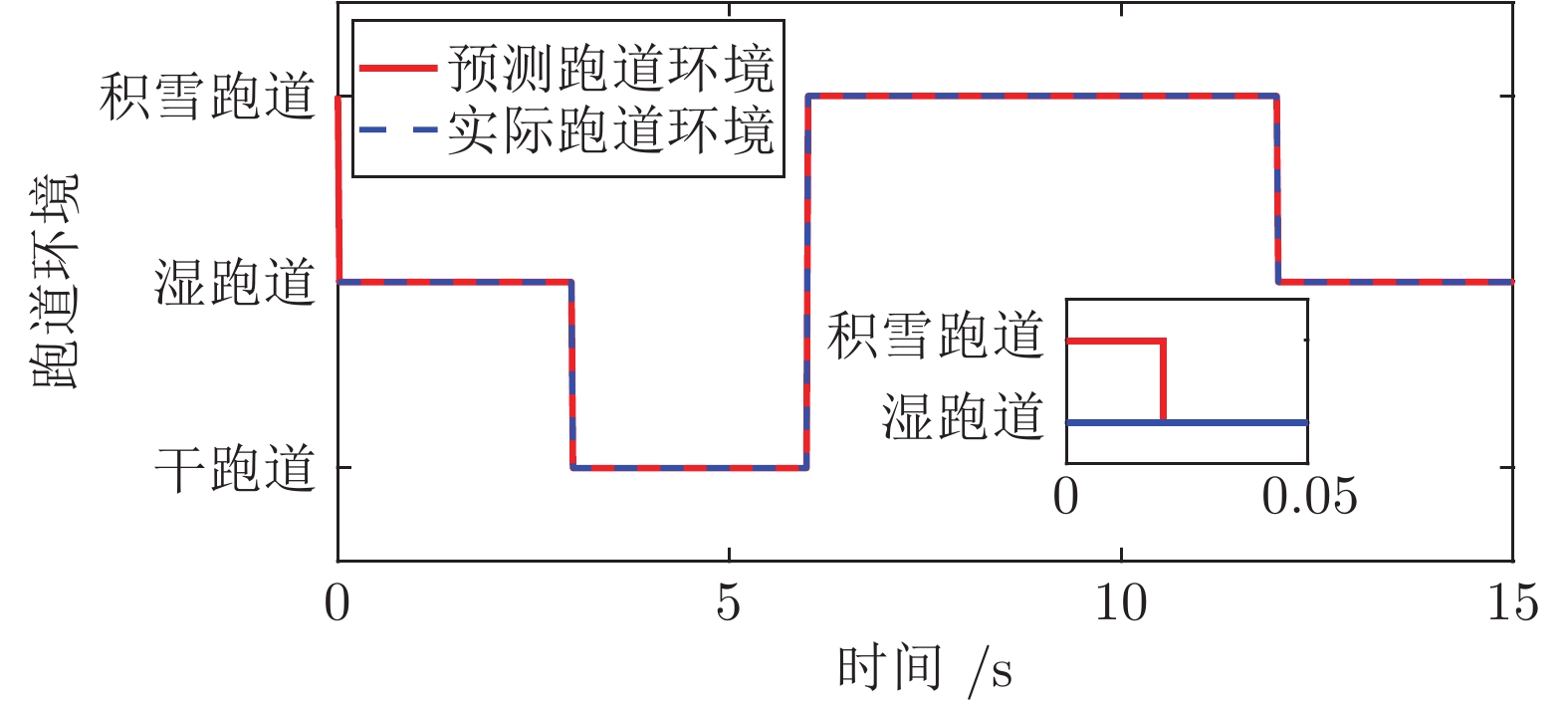
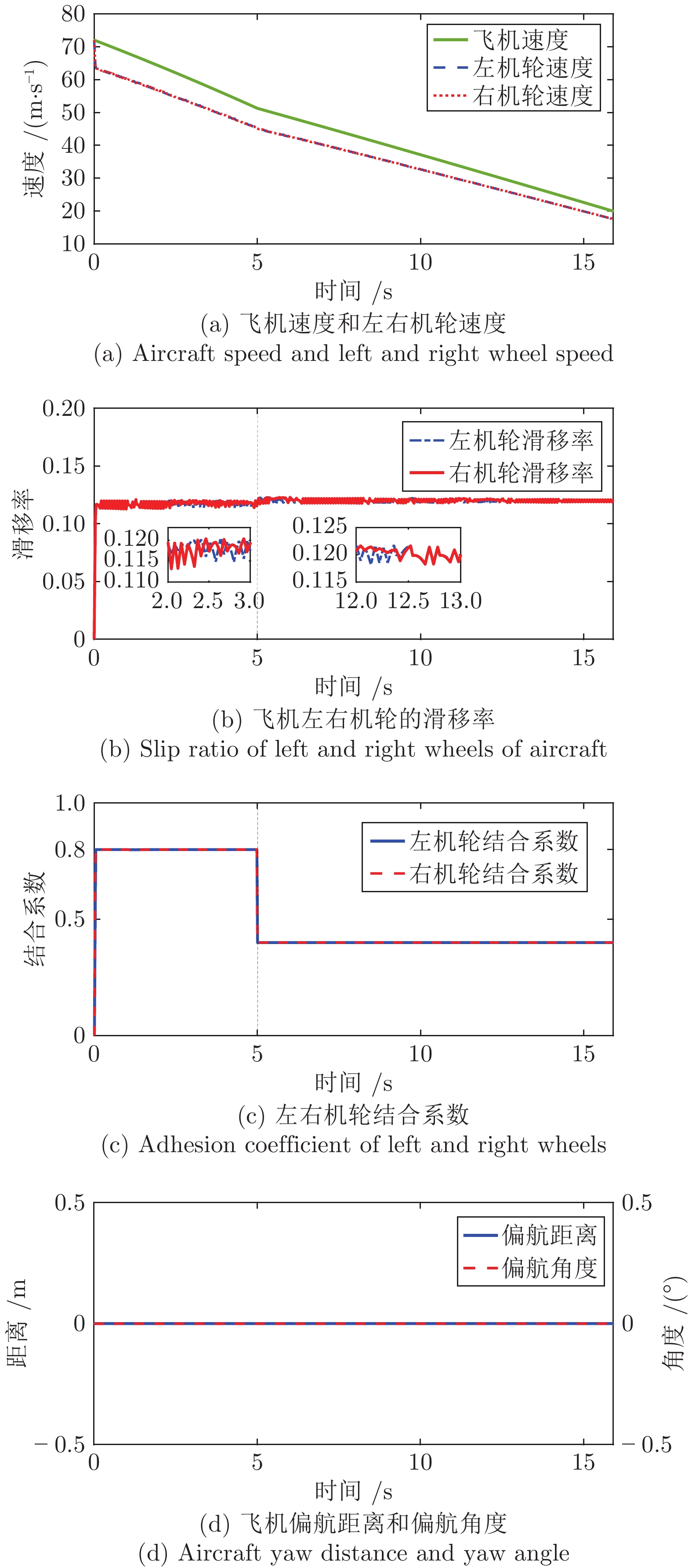
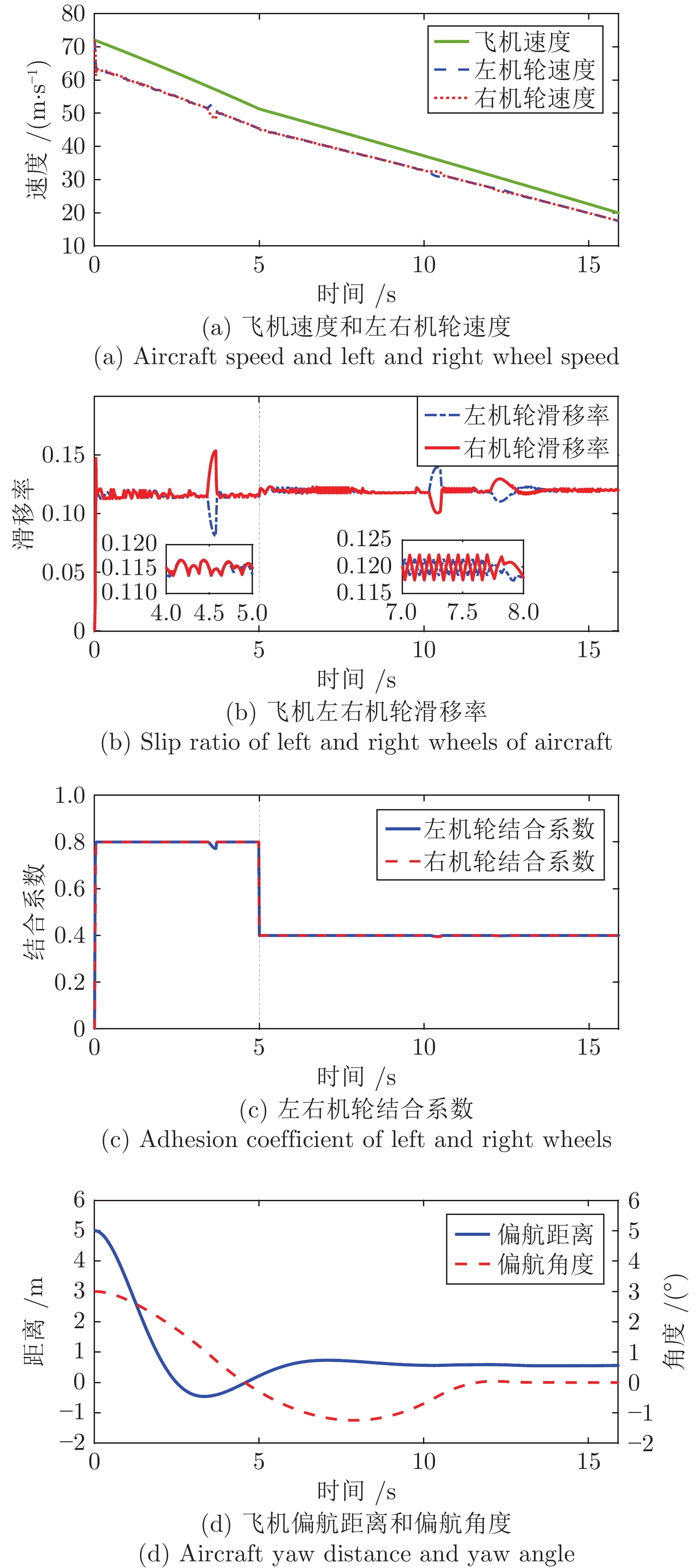
针对飞机在非对称运动下的双侧机轮协调控制问题, 提出一种基于滑模干扰估计的模型预测控制方法. 首先, 通过对飞机制动过程横纵方向力矩机理分析并分别考虑左右机轮对刹车性能的影响, 建立全面刻画系统动态的地面滑跑动力学模型. 在此基础上, 设计滑模观测器对侧风干扰进行实时估计, 利用补偿机制实现对侧风扰动的有效抑制. 此外, 提出基于前轮荷载状态门限特征和结合系数阈值范围特征的分析方法, 解决切换跑道环境辨识问题. 设计非线性模型预测算法, 实现飞机纵向防滑刹车和横向跑道纠偏的协调控制. 最后, 在侧风干扰、跑道切换以及不对称着陆等情况下进行仿真实验, 验证了所提出的控制策略能够有效提升刹车系统的防滑效率及纠偏性能.
针对飞机在非对称运动下的双侧机轮协调控制问题, 提出一种基于滑模干扰估计的模型预测控制方法. 首先, 通过对飞机制动过程横纵方向力矩机理分析并分别考虑左右机轮对刹车性能的影响, 建立全面刻画系统动态的地面滑跑动力学模型. 在此基础上, 设计滑模观测器对侧风干扰进行实时估计, 利用补偿机制实现对侧风扰动的有效抑制. 此外, 提出基于前轮荷载状态门限特征和结合系数阈值范围特征的分析方法, 解决切换跑道环境辨识问题. 设计非线性模型预测算法, 实现飞机纵向防滑刹车和横向跑道纠偏的协调控制. 最后, 在侧风干扰、跑道切换以及不对称着陆等情况下进行仿真实验, 验证了所提出的控制策略能够有效提升刹车系统的防滑效率及纠偏性能.



2022, 48(7): 1704-1717.
doi: 10.16383/j.aas.c210949
摘要:
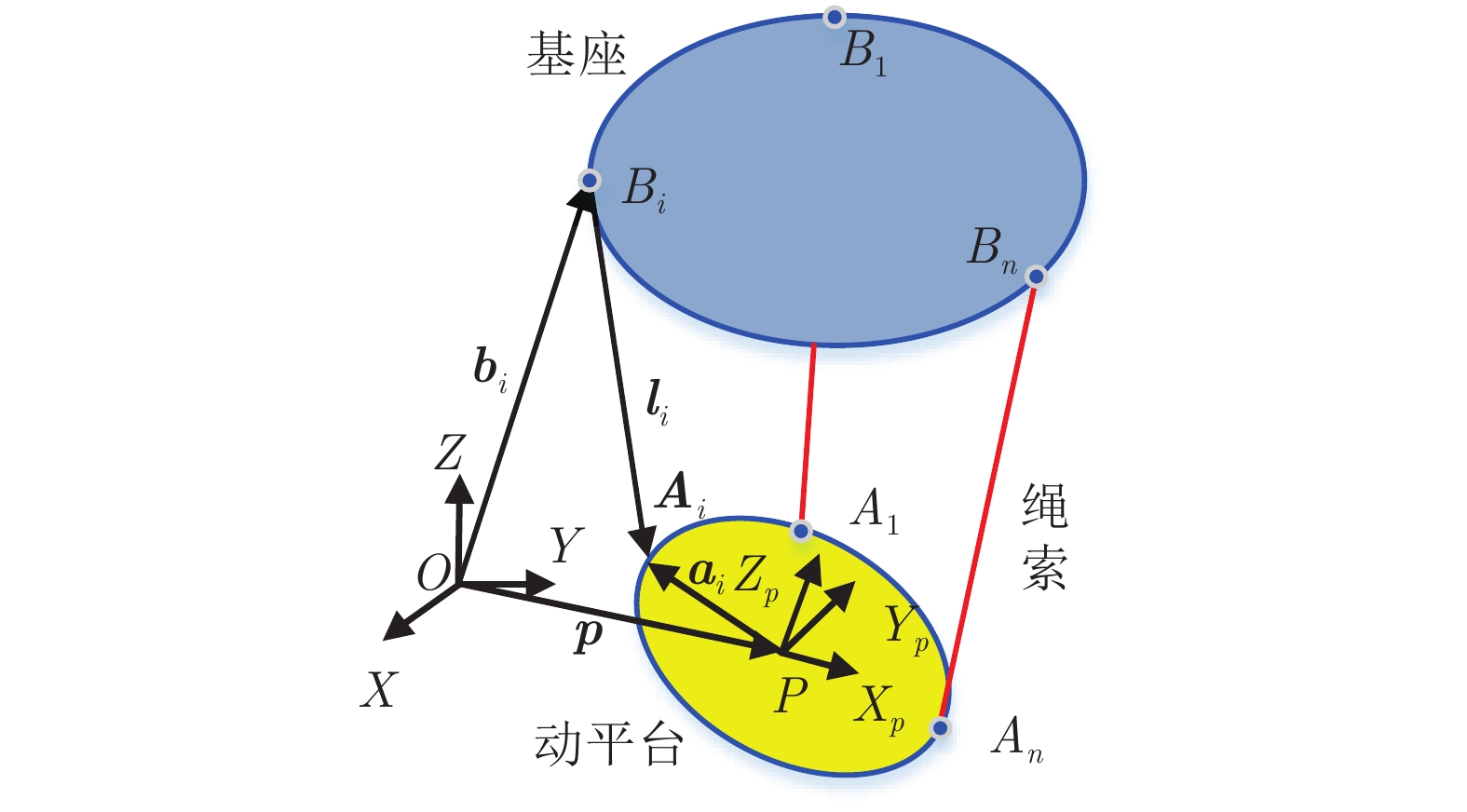
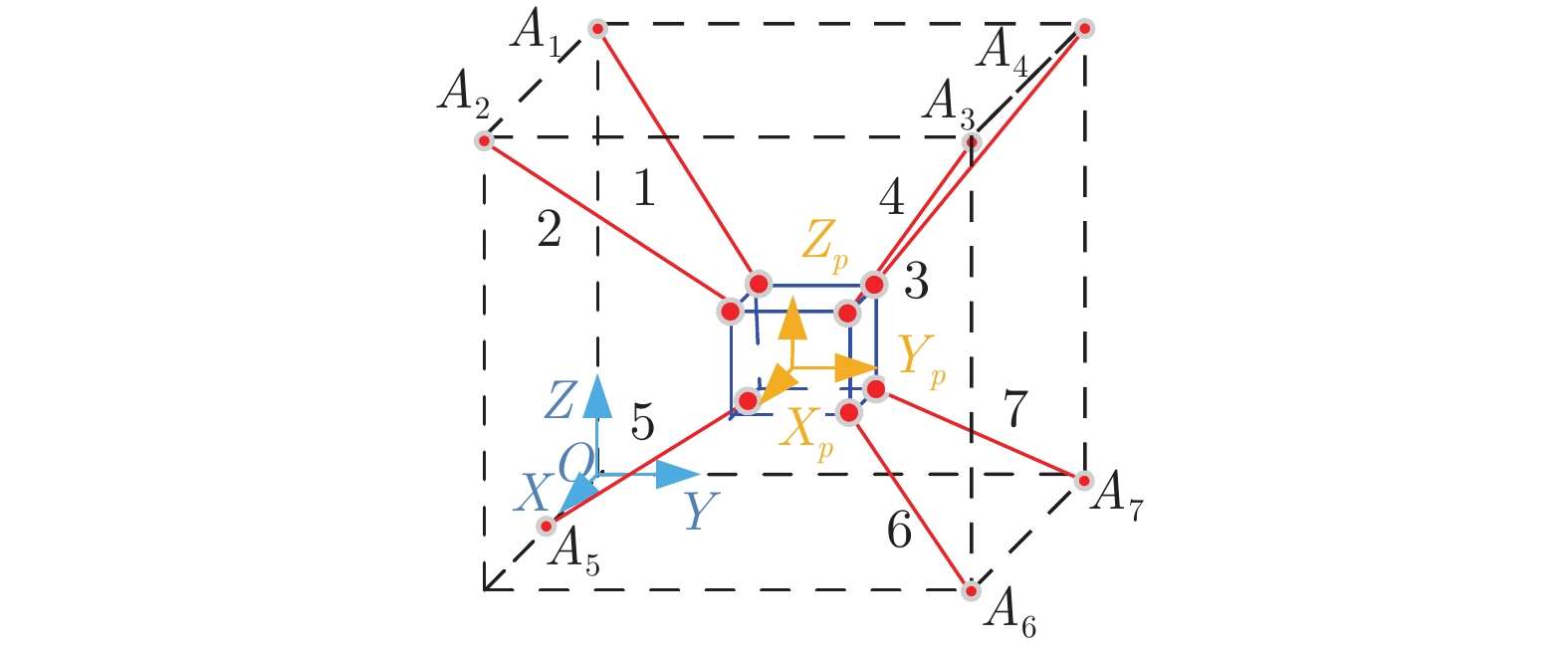
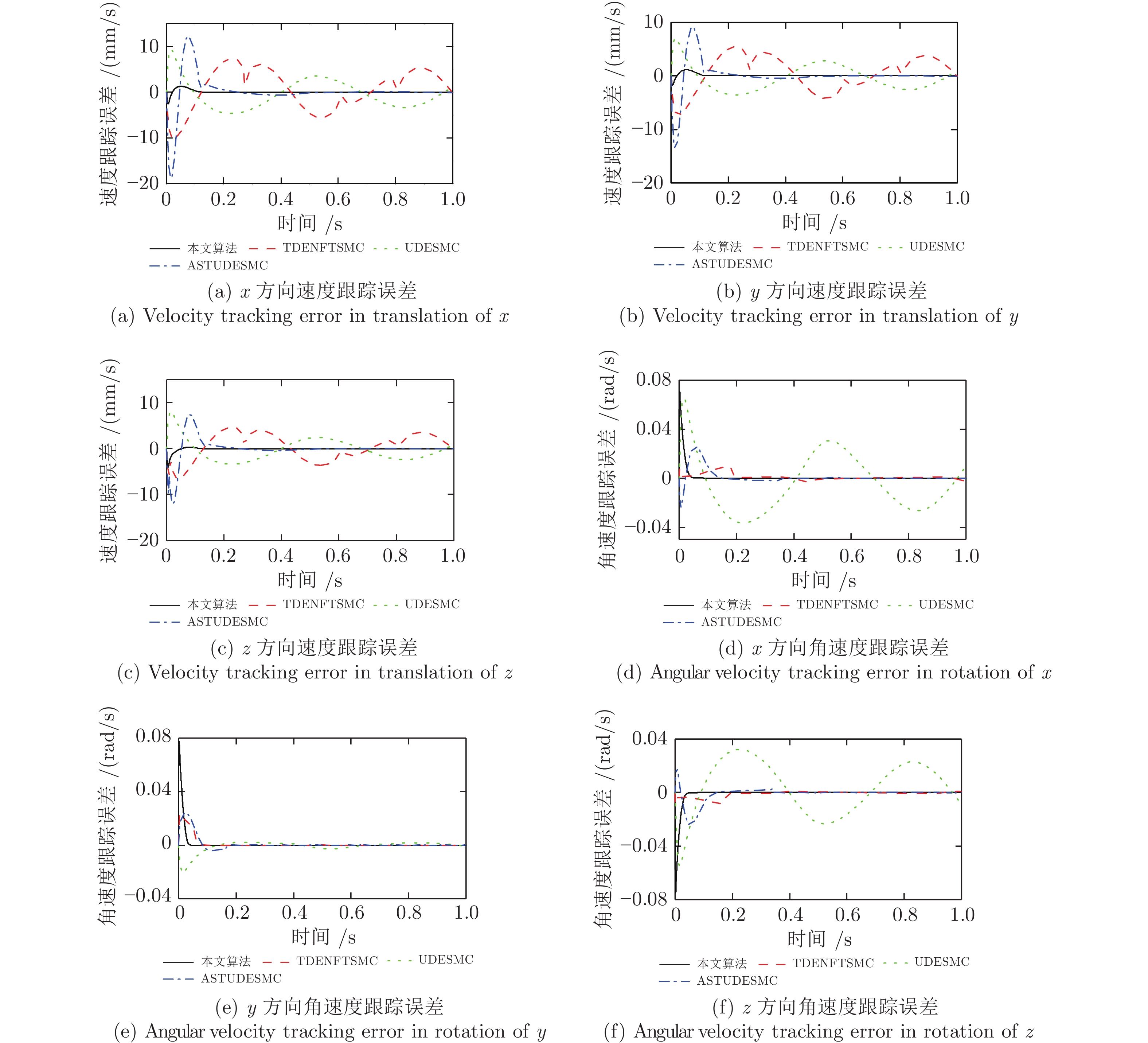
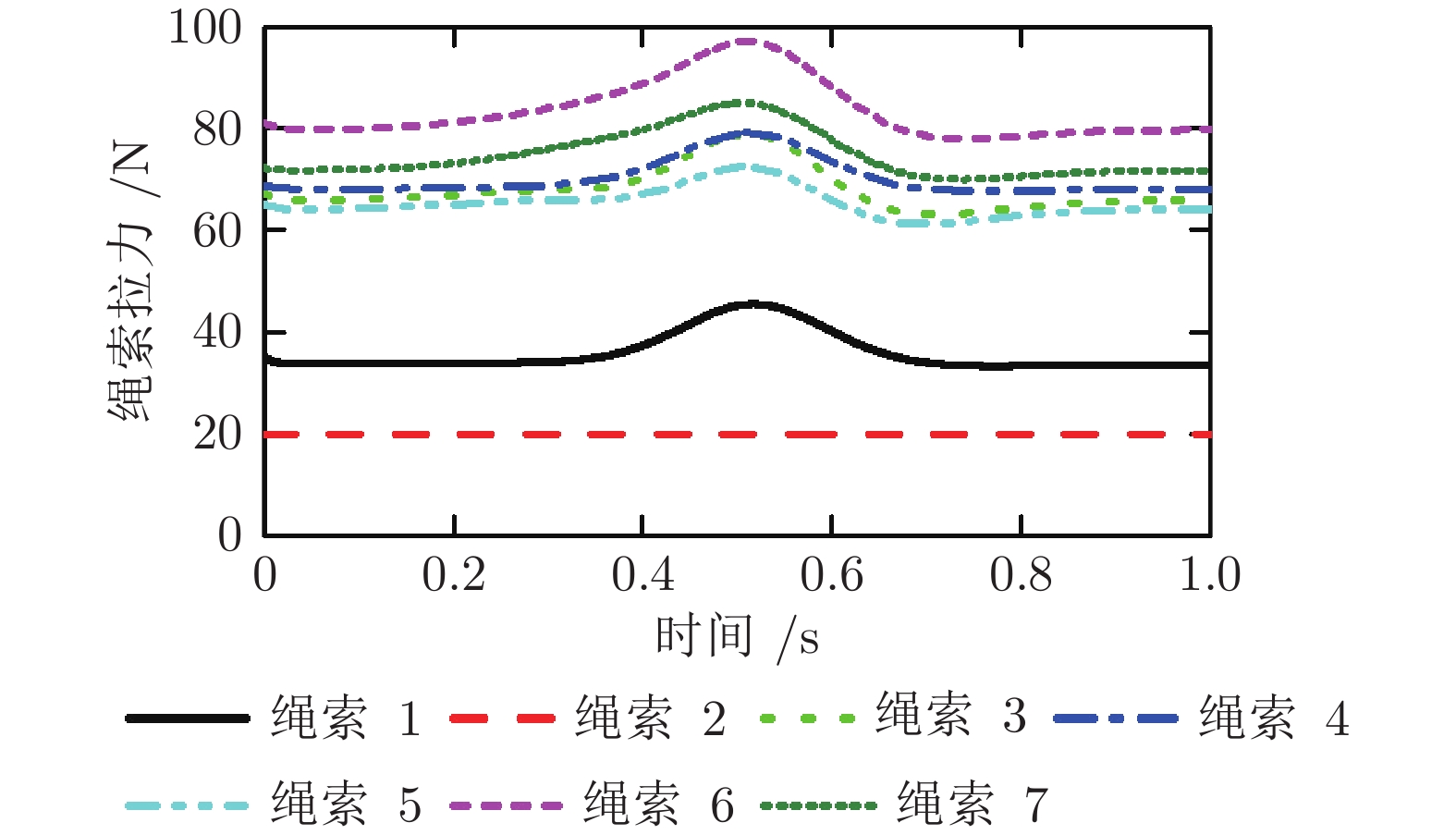
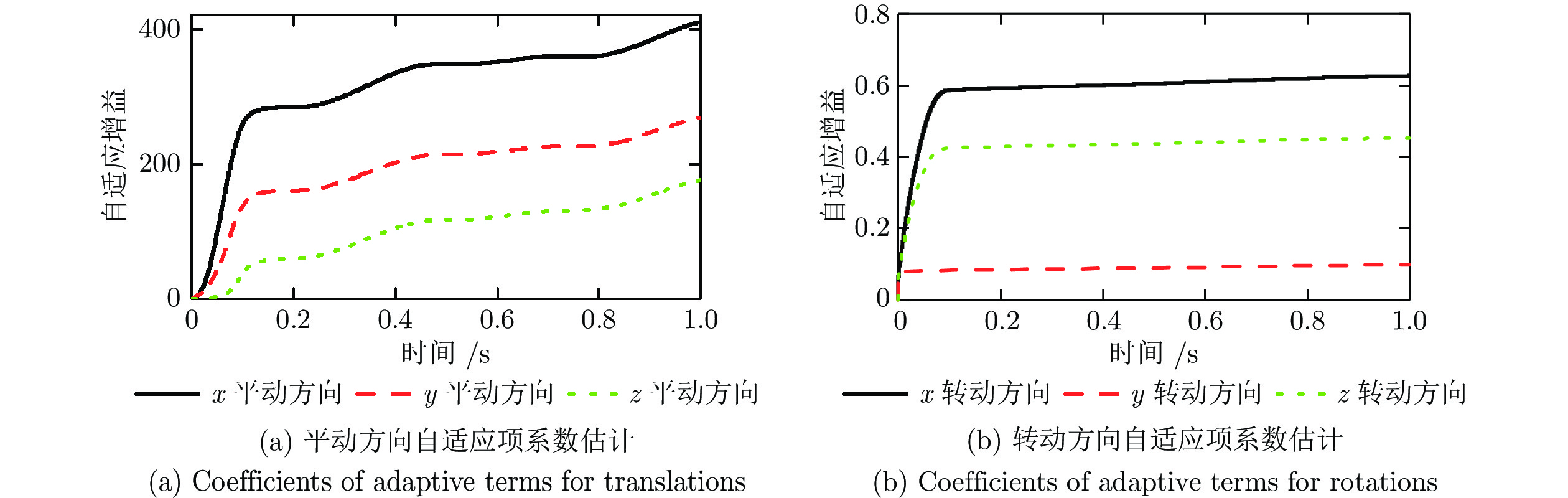
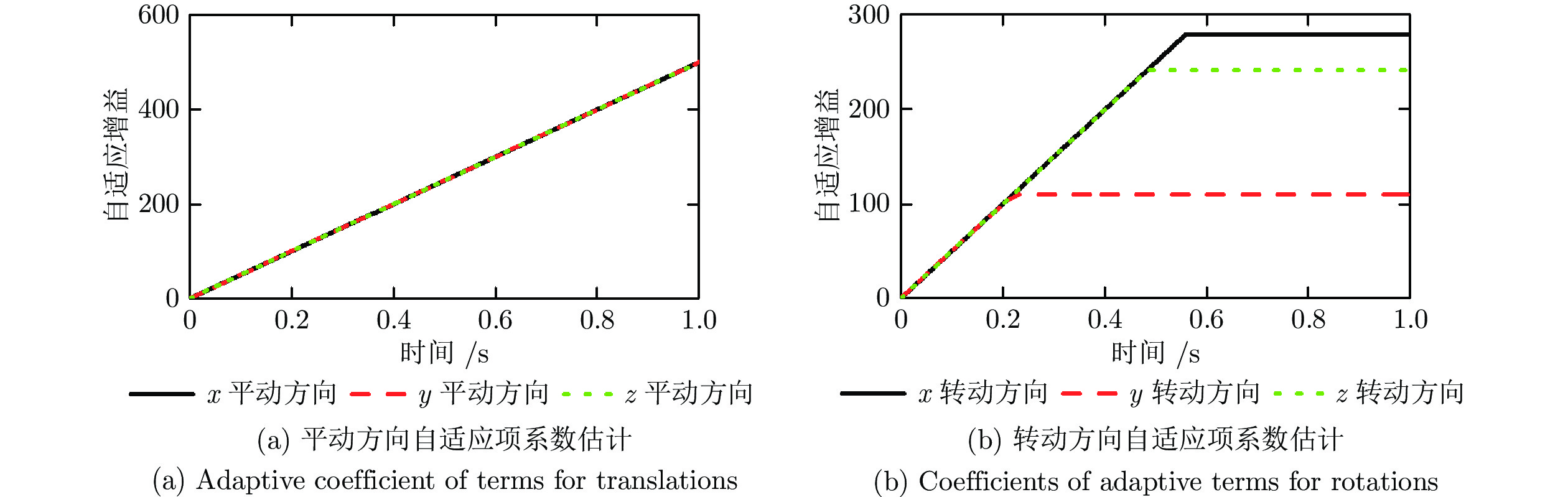
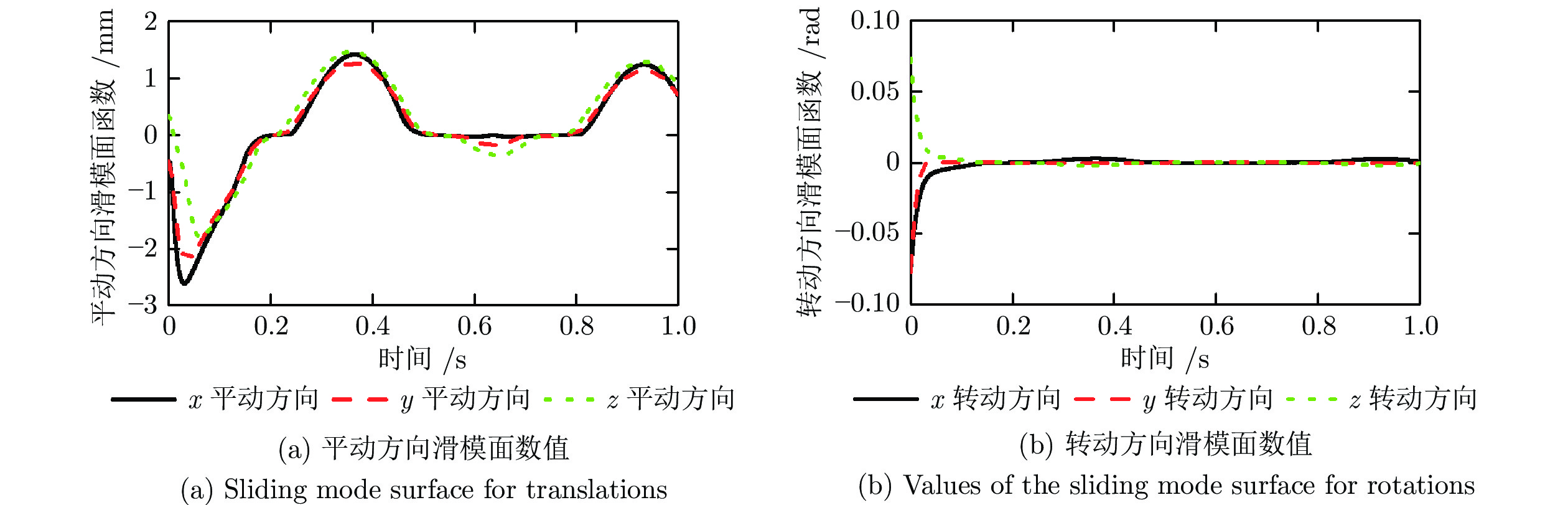
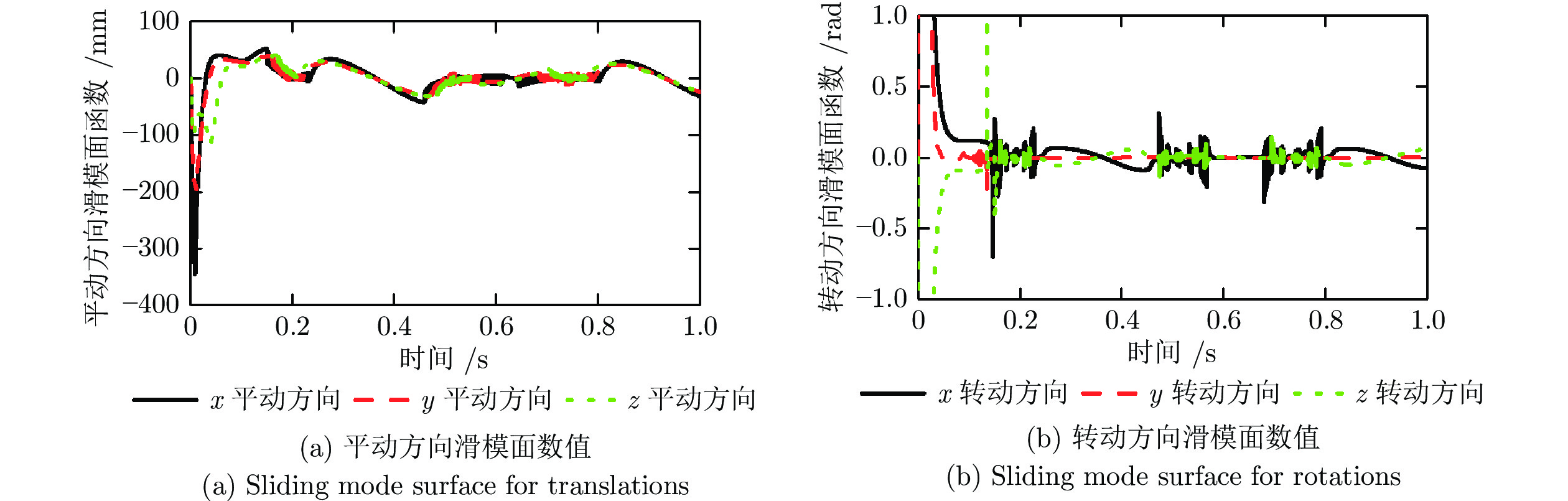
提出一种考虑输出约束的冗余驱动绳索并联机器人(Redundantly-actuated cable driving parallel robots, RCDPRs)预设性能有限时间控制算法. 首先, 采用Newton-Euler方程推导系统动力学模型, 并建立绳索拉力优化模型保证系统正常工作; 其次, 将输出约束问题转化为位置跟踪误差的坐标变换问题, 设计给定时间衰减函数与非对称变换函数, 将约束形式的跟踪误差转化为无约束变量, 实现给定时间的输出约束; 然后, 针对滑模控制的抖振问题, 在预设性能控制中采用模型不确定与扰动估计器进行扰动估计, 并通过自适应方法对扰动估计误差进行补偿; 以此为基础, 提出一种基于精度驱动且在分段点处三阶连续的终端滑模面进行控制算法设计; 最后, 采用Lyapunov函数证明算法的有限时间收敛特性, 并以7自由度冗余驱动绳索并联机器人为控制对象进行仿真研究, 对算法进行验证.
提出一种考虑输出约束的冗余驱动绳索并联机器人(Redundantly-actuated cable driving parallel robots, RCDPRs)预设性能有限时间控制算法. 首先, 采用Newton-Euler方程推导系统动力学模型, 并建立绳索拉力优化模型保证系统正常工作; 其次, 将输出约束问题转化为位置跟踪误差的坐标变换问题, 设计给定时间衰减函数与非对称变换函数, 将约束形式的跟踪误差转化为无约束变量, 实现给定时间的输出约束; 然后, 针对滑模控制的抖振问题, 在预设性能控制中采用模型不确定与扰动估计器进行扰动估计, 并通过自适应方法对扰动估计误差进行补偿; 以此为基础, 提出一种基于精度驱动且在分段点处三阶连续的终端滑模面进行控制算法设计; 最后, 采用Lyapunov函数证明算法的有限时间收敛特性, 并以7自由度冗余驱动绳索并联机器人为控制对象进行仿真研究, 对算法进行验证.


2022, 48(7): 1718-1736.
doi: 10.16383/j.aas.c200168
摘要:
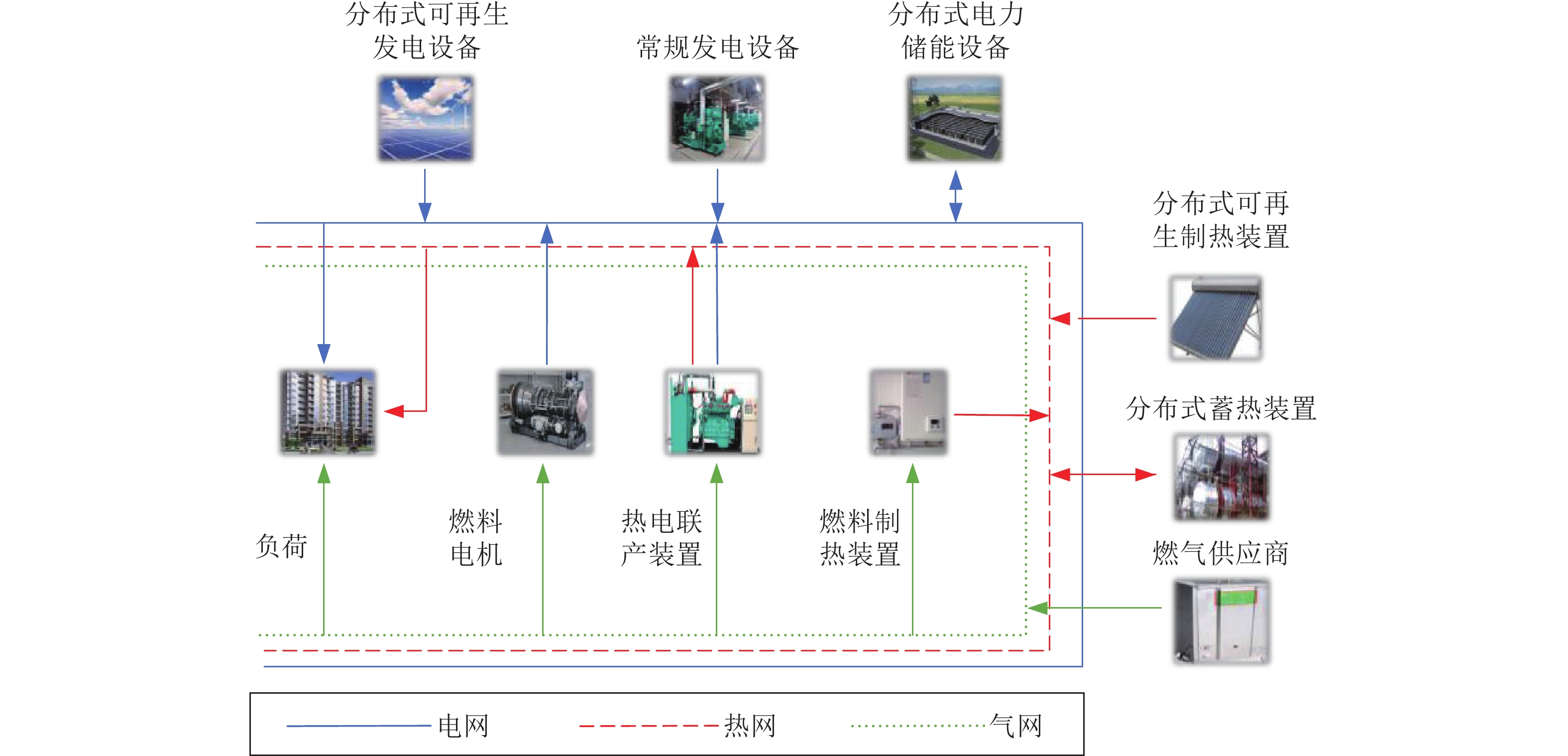
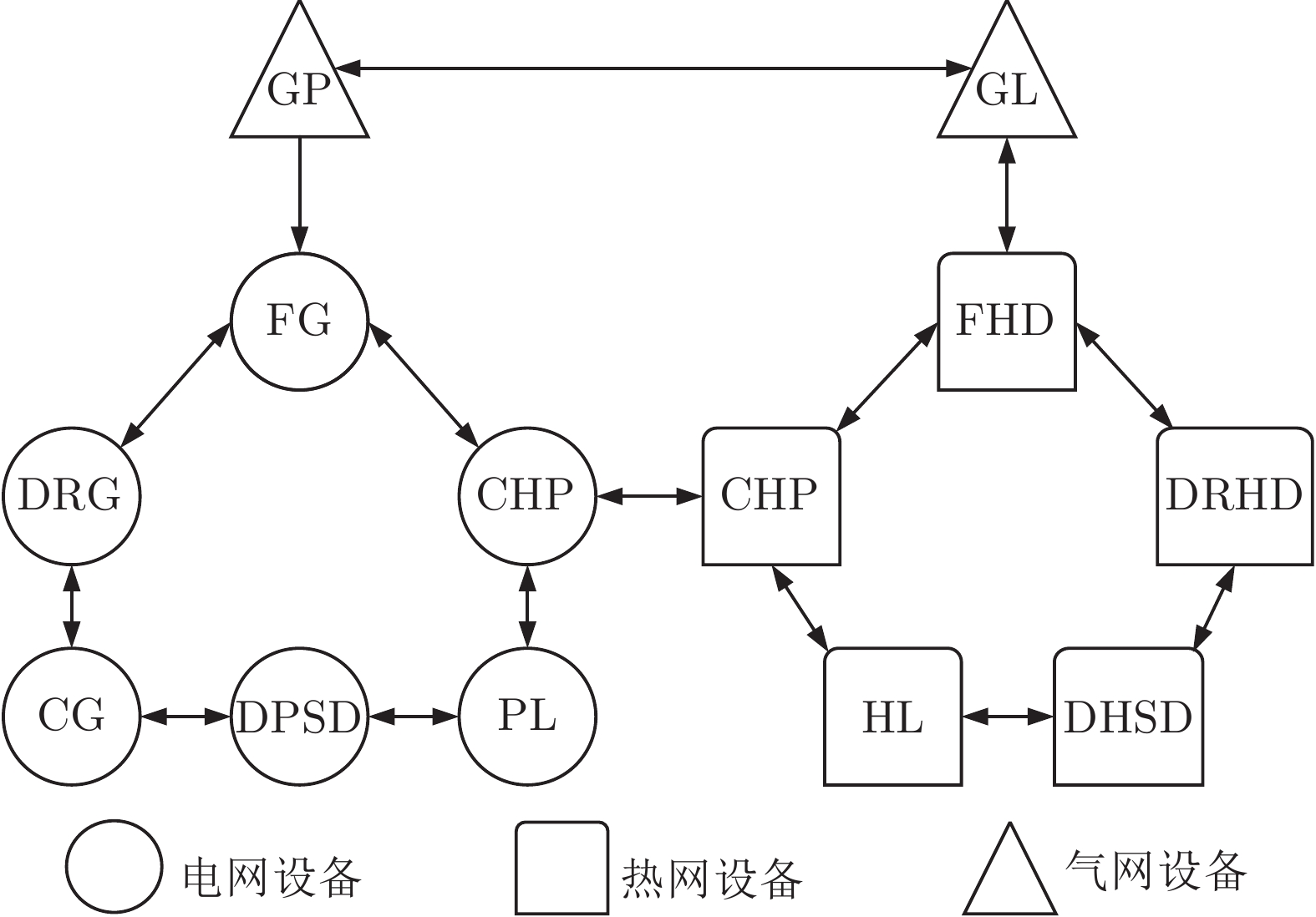
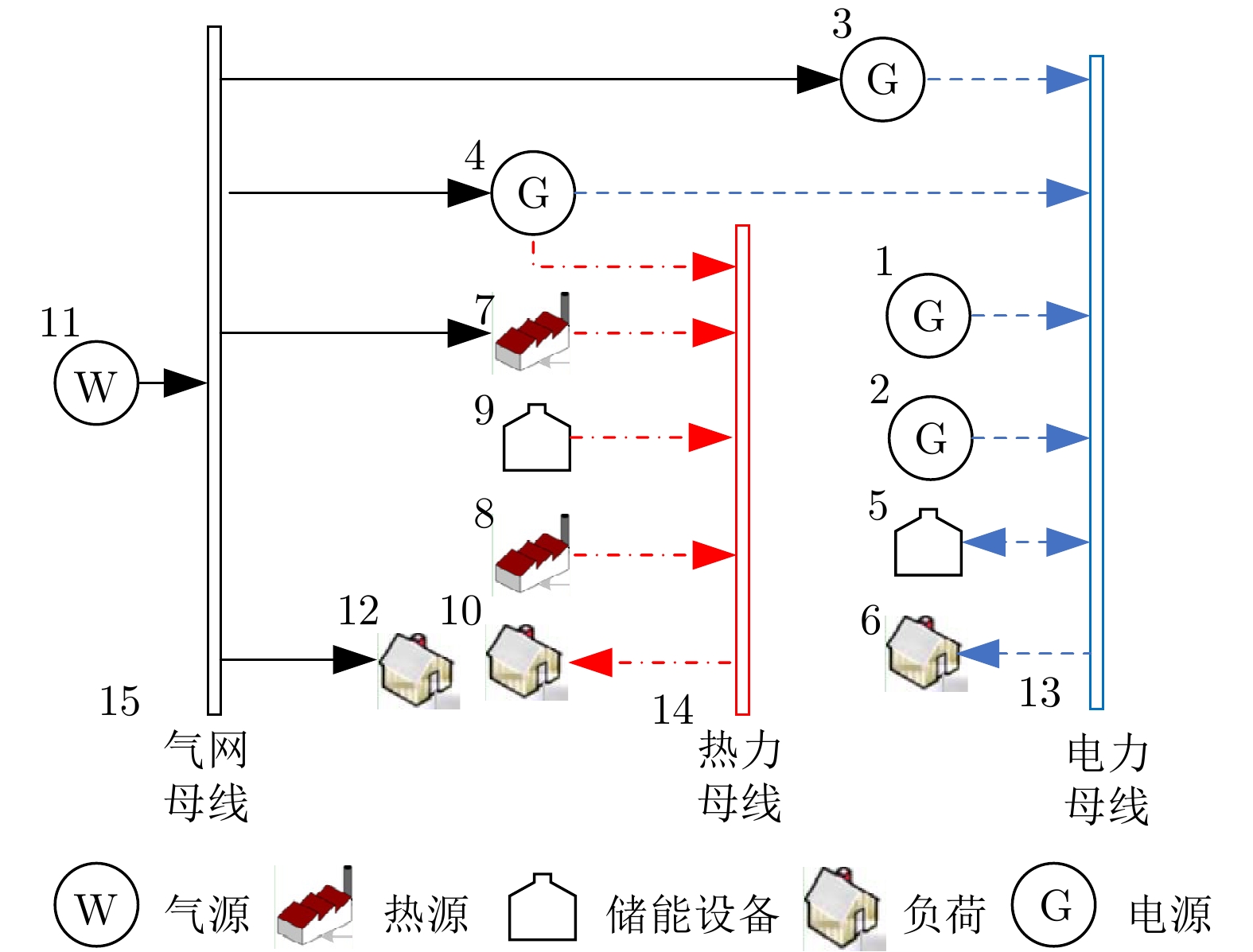
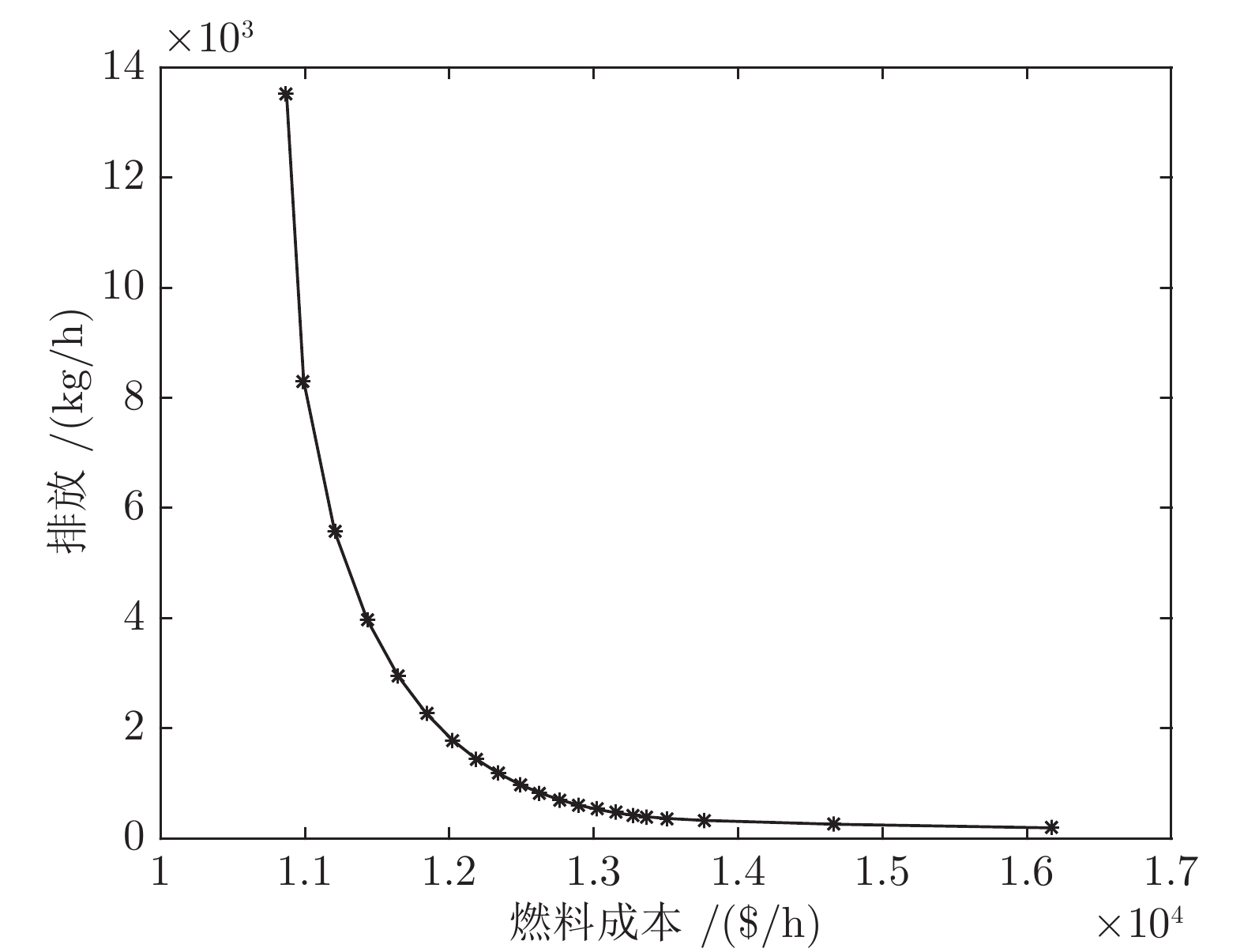
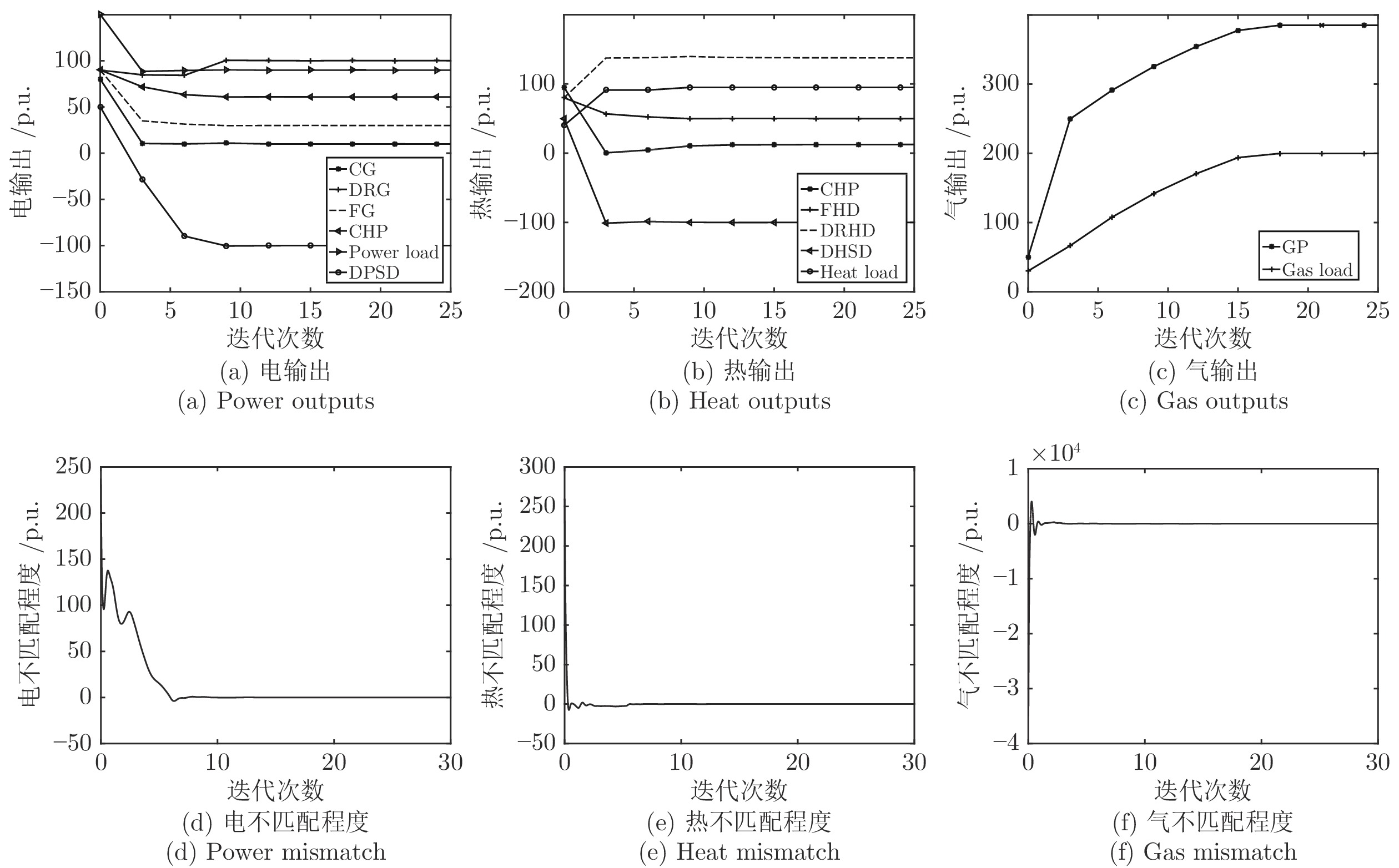
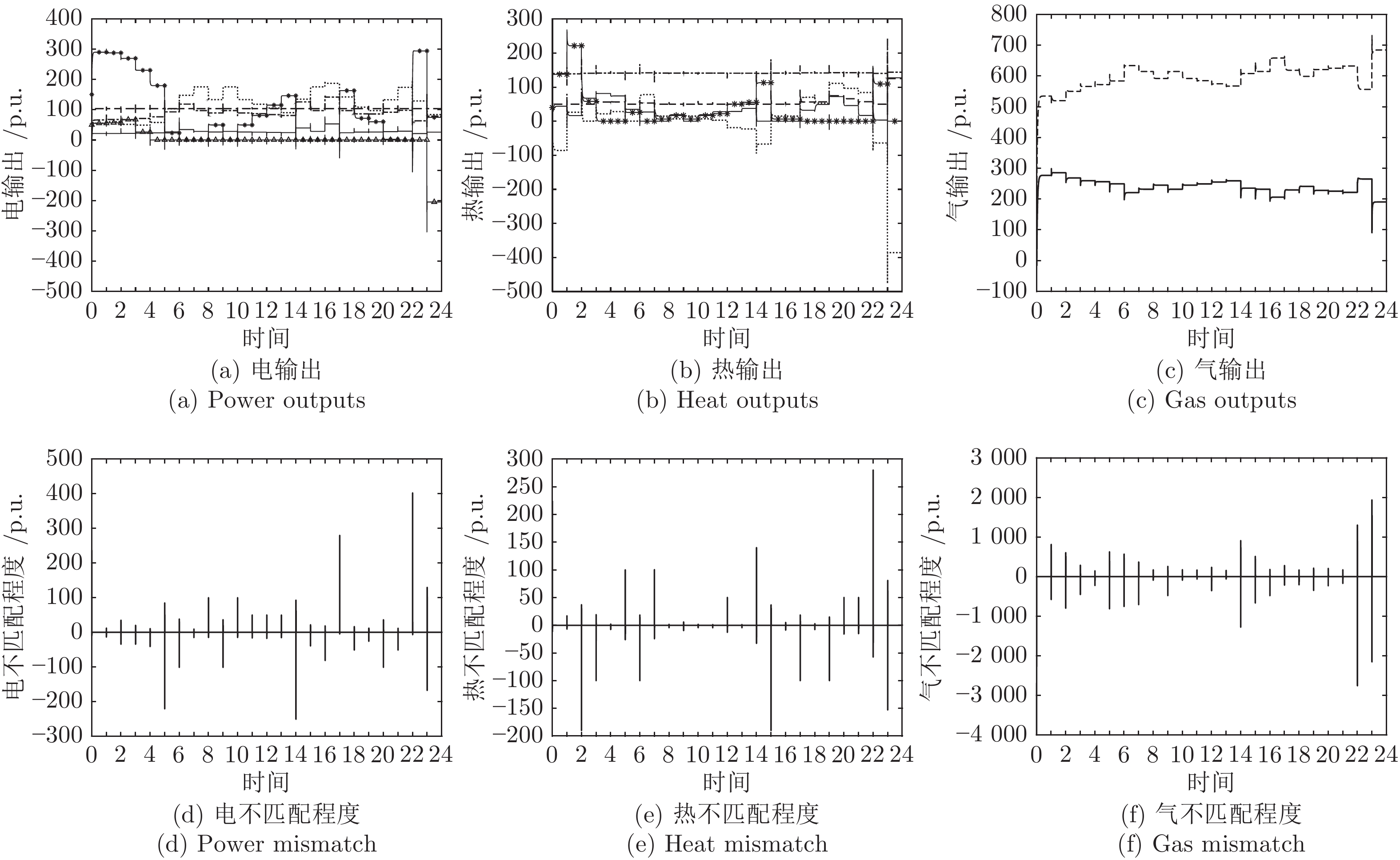
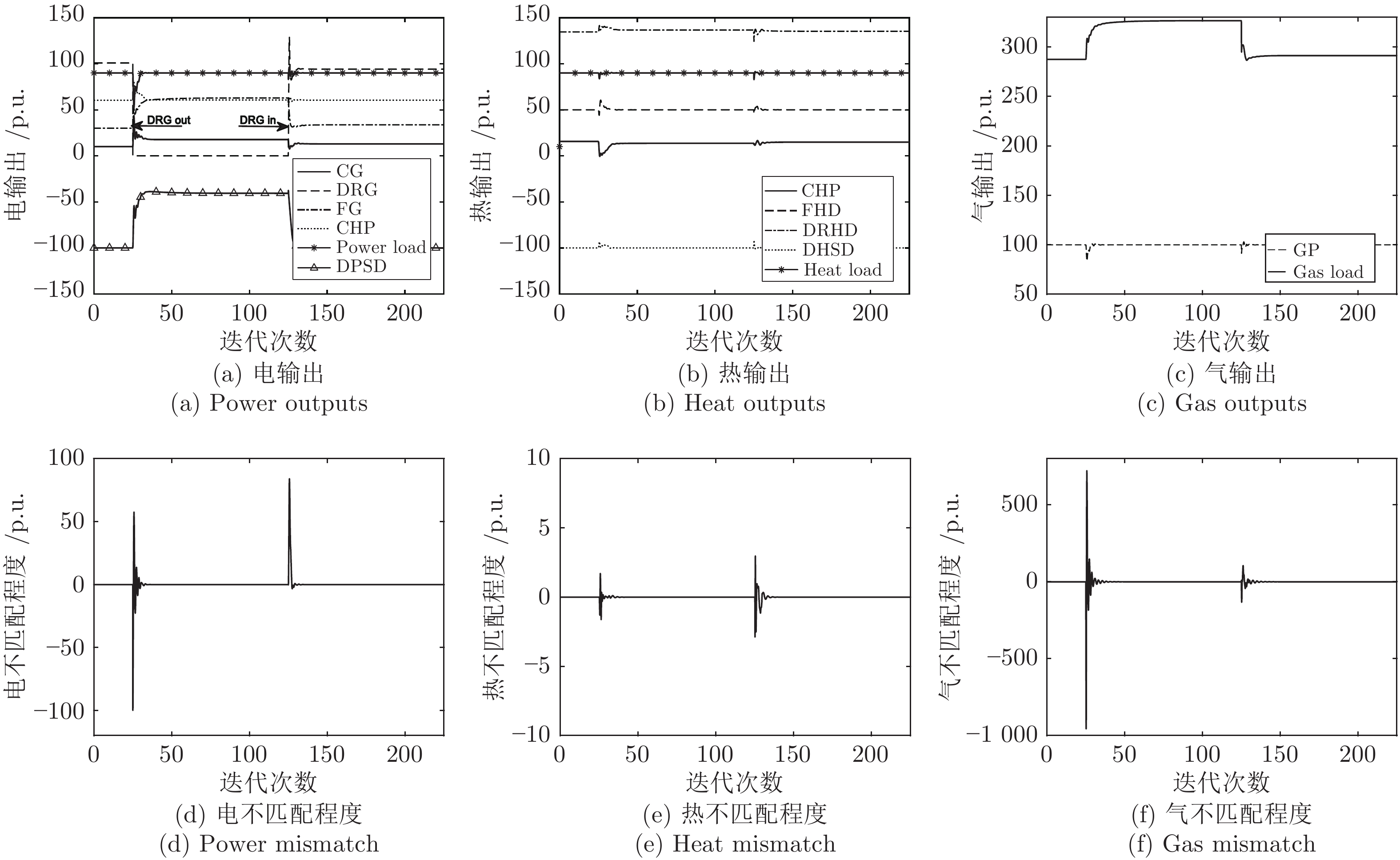
研究了基于神经动态优化的综合能源系统(Integrated energy systems, IES)分布式多目标优化调度问题. 首先, 将IES元件单元(包含负荷)作为独立的决策主体, 联合考量其运行成本和排放成本, 并计及多能源设备间的传输损耗, 提出了IES多目标优化调度模型, 该模型可描述为一类非凸多目标优化问题. 其次, 针对此类问题的求解, 提出了一种基于神经动力学系统的分布式多目标优化算法, 该算法基于动态权重的神经网络模型, 可以解决不可分离的不等式约束问题. 该算法计算负担小, 收敛速度快, 并且易于硬件实现. 仿真结果表明, 所提算法能同时协调综合能源系统的经济性和环境性这两个冲突的目标, 且获得了整个帕累托前沿, 有效降低了综合能源系统的污染物排放量和综合运行成本.
研究了基于神经动态优化的综合能源系统(Integrated energy systems, IES)分布式多目标优化调度问题. 首先, 将IES元件单元(包含负荷)作为独立的决策主体, 联合考量其运行成本和排放成本, 并计及多能源设备间的传输损耗, 提出了IES多目标优化调度模型, 该模型可描述为一类非凸多目标优化问题. 其次, 针对此类问题的求解, 提出了一种基于神经动力学系统的分布式多目标优化算法, 该算法基于动态权重的神经网络模型, 可以解决不可分离的不等式约束问题. 该算法计算负担小, 收敛速度快, 并且易于硬件实现. 仿真结果表明, 所提算法能同时协调综合能源系统的经济性和环境性这两个冲突的目标, 且获得了整个帕累托前沿, 有效降低了综合能源系统的污染物排放量和综合运行成本.


2022, 48(7): 1737-1746.
doi: 10.16383/j.aas.c190902
摘要:
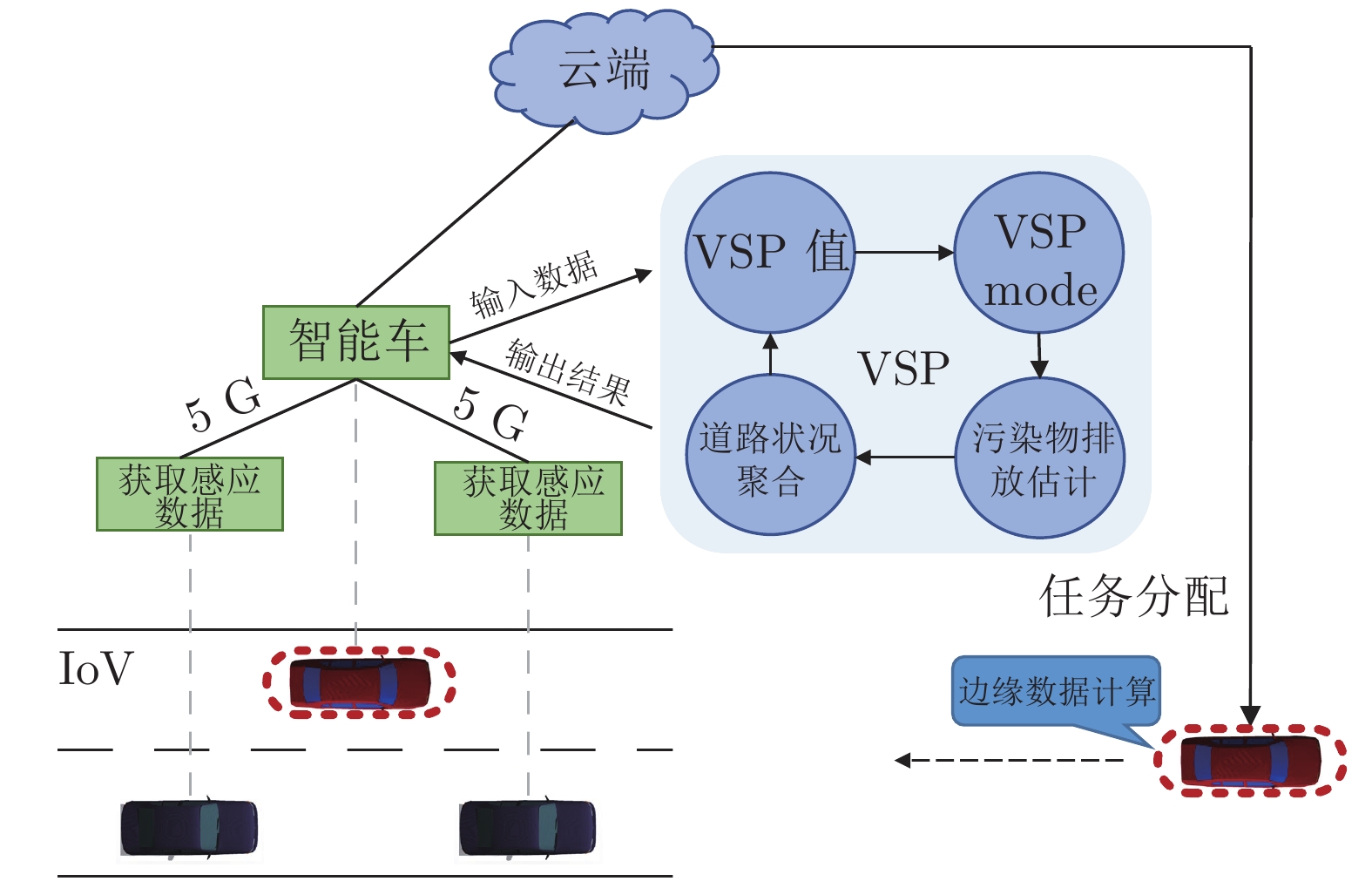
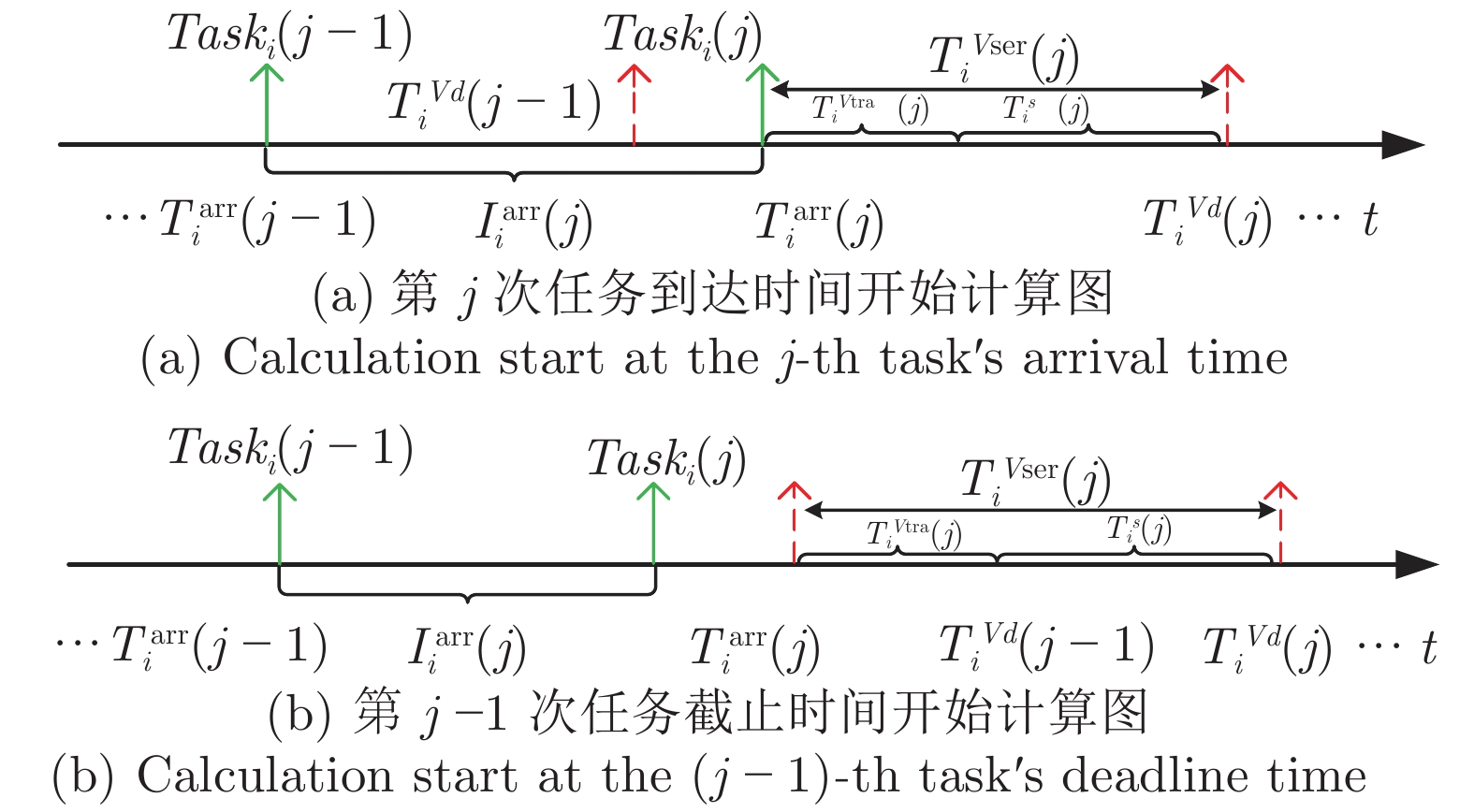
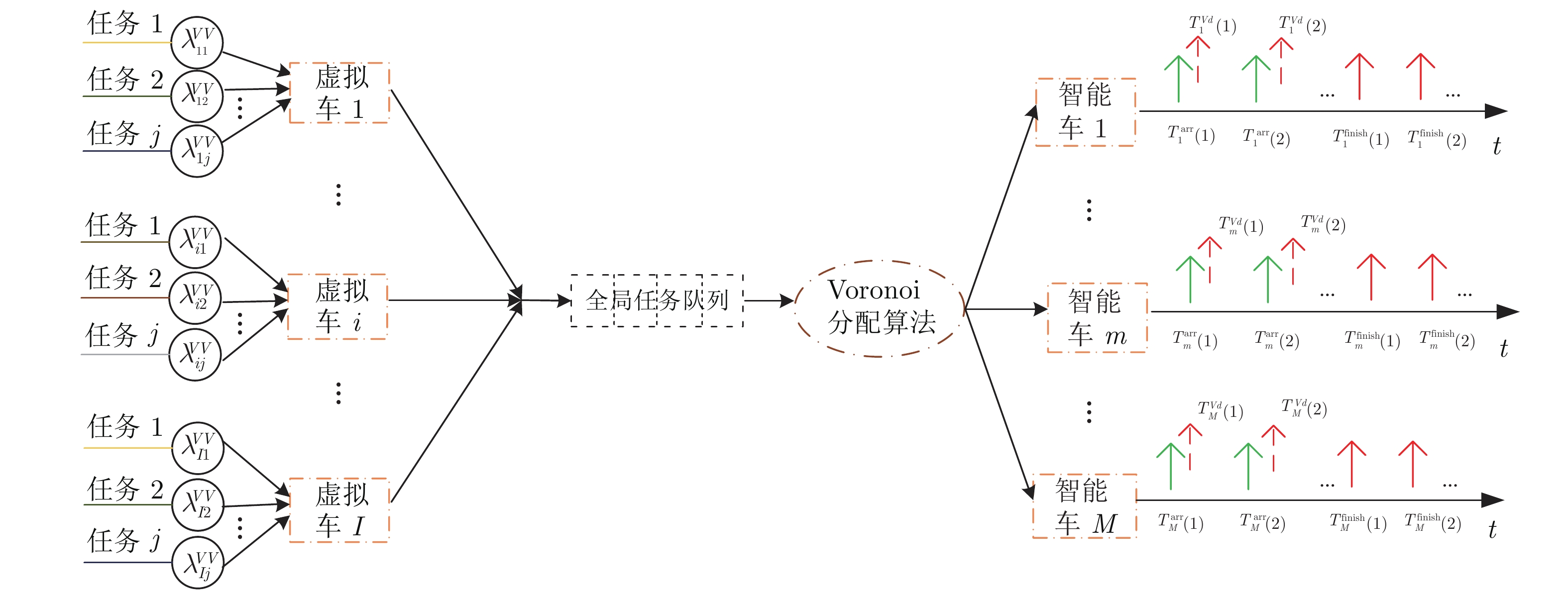
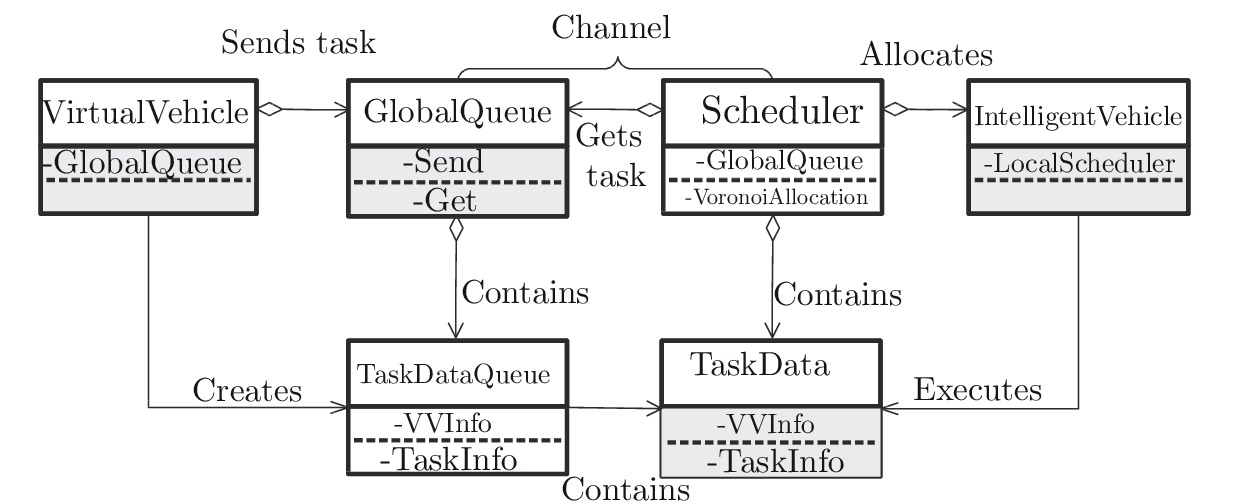
针对车联网环境下路侧边缘计算节点部署不均衡、服务密度小、实时调度计算压力大等问题, 提出一种基于智能车移动边缘计算(Mobile edge computing, MEC)的任务排队建模与调度算法, 提供弹性计算服务, 将具备感知、计算、控制功能的智能车作为移动边缘计算服务器, 设计了车联网环境下的MEC体系架构. 首先基于虚拟化技术对智能车进行虚拟化抽象, 利用排队论对虚拟车任务构建了GI/GI/1排队模型. 然后基于云平台Voronoi分配算法对虚拟车任务进行分配绑定, 进而实现了智能车的优化调度与分布式弹性服务, 解决了边缘计算任务分配不均衡等问题. 最后通过城市交通路网中的车辆污染排放的实时计算实验, 验证了该方法的有效性.
针对车联网环境下路侧边缘计算节点部署不均衡、服务密度小、实时调度计算压力大等问题, 提出一种基于智能车移动边缘计算(Mobile edge computing, MEC)的任务排队建模与调度算法, 提供弹性计算服务, 将具备感知、计算、控制功能的智能车作为移动边缘计算服务器, 设计了车联网环境下的MEC体系架构. 首先基于虚拟化技术对智能车进行虚拟化抽象, 利用排队论对虚拟车任务构建了GI/GI/1排队模型. 然后基于云平台Voronoi分配算法对虚拟车任务进行分配绑定, 进而实现了智能车的优化调度与分布式弹性服务, 解决了边缘计算任务分配不均衡等问题. 最后通过城市交通路网中的车辆污染排放的实时计算实验, 验证了该方法的有效性.



2022, 48(7): 1747-1759.
doi: 10.16383/j.aas.c190514
摘要:
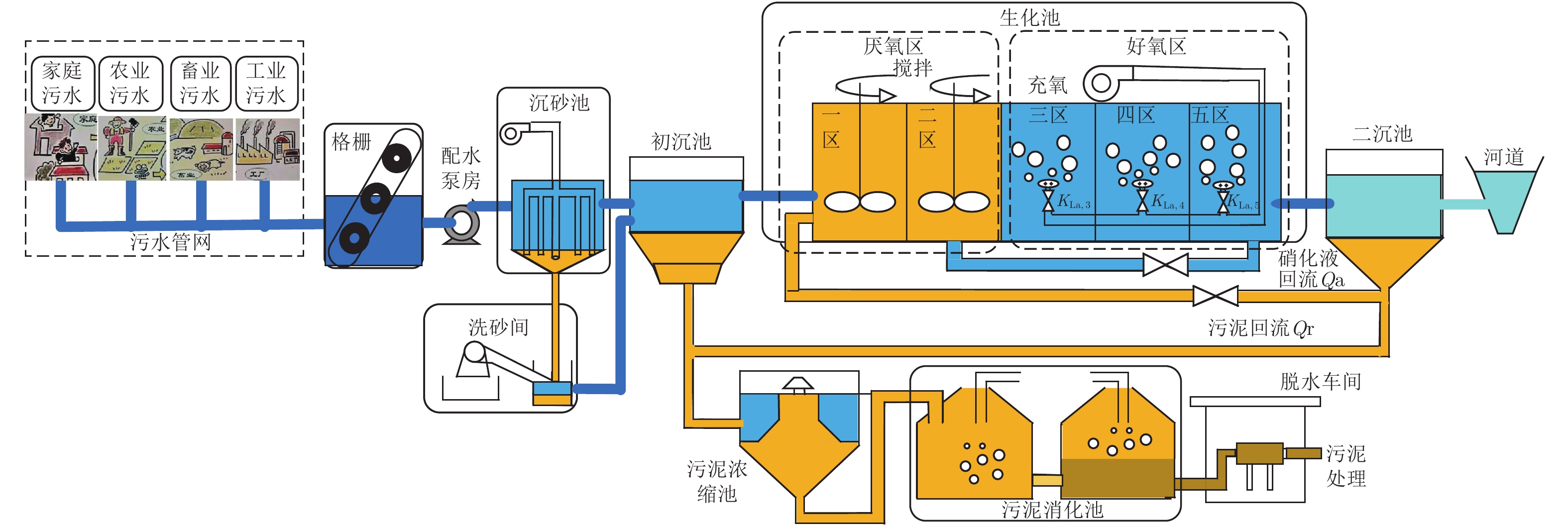
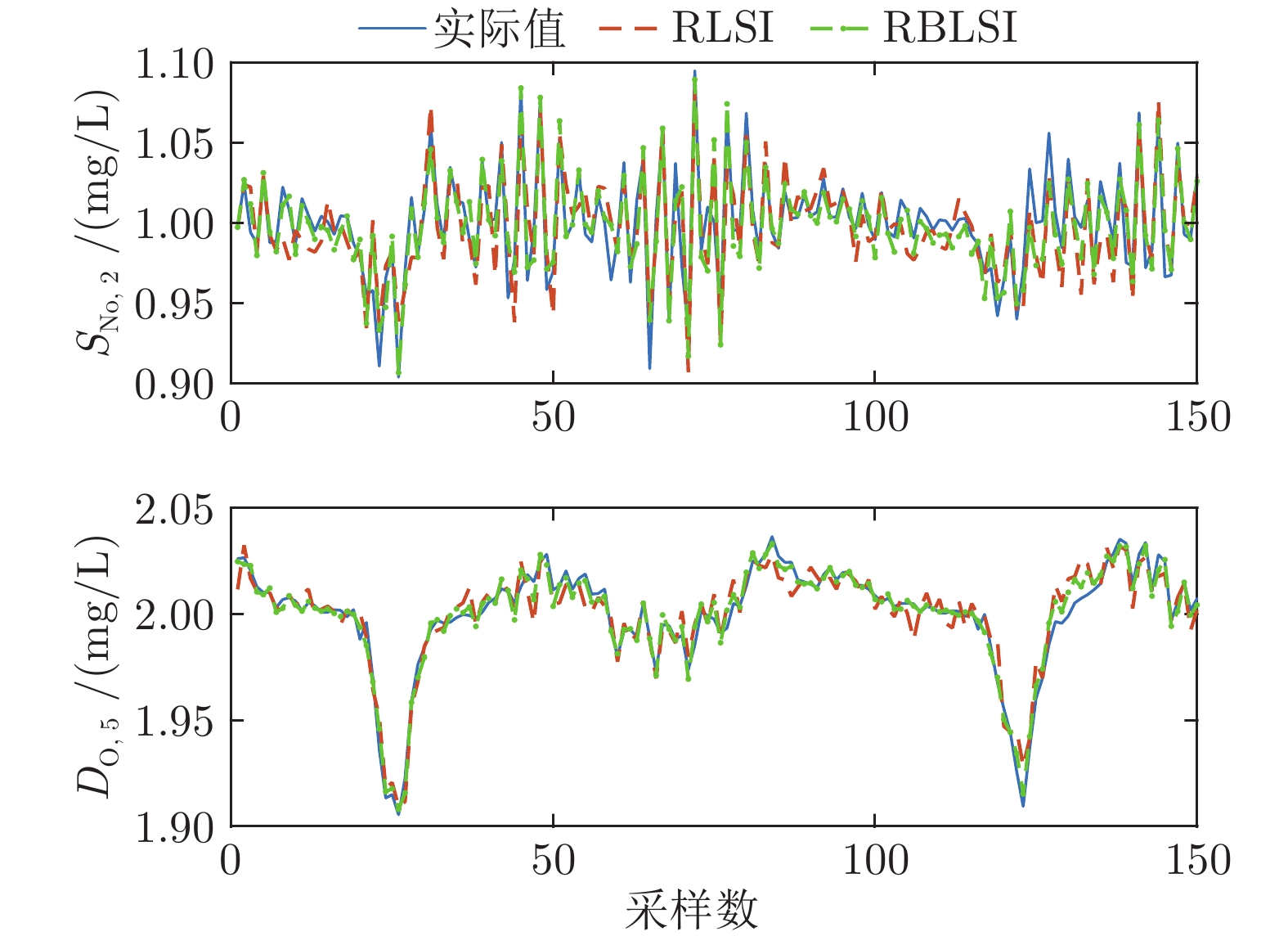
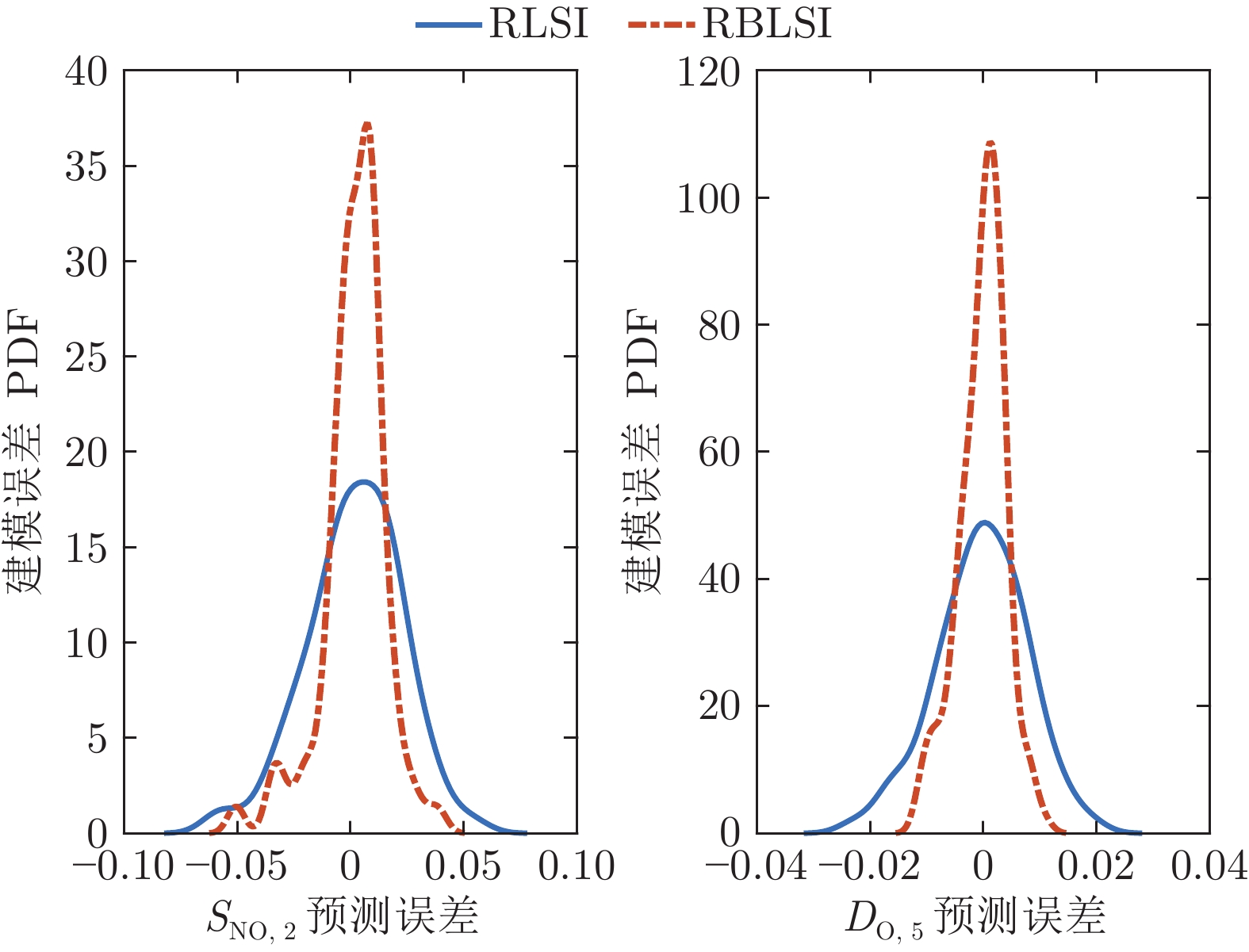
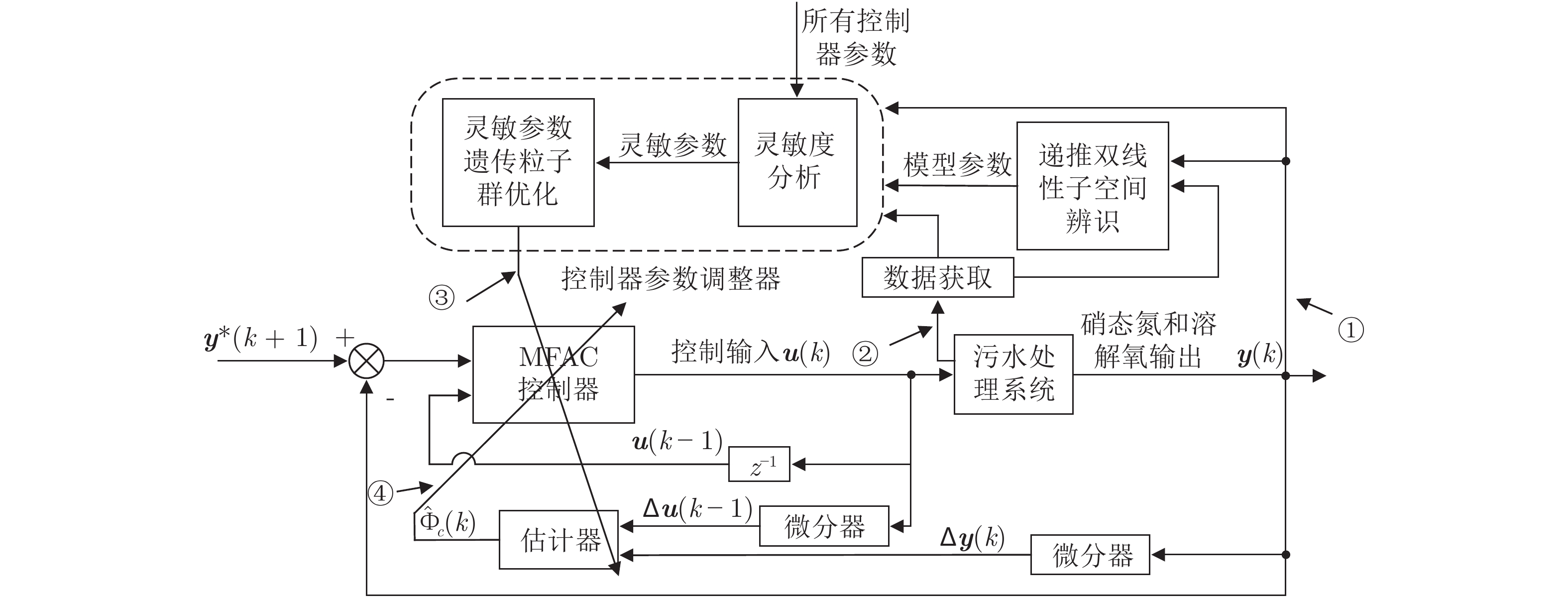
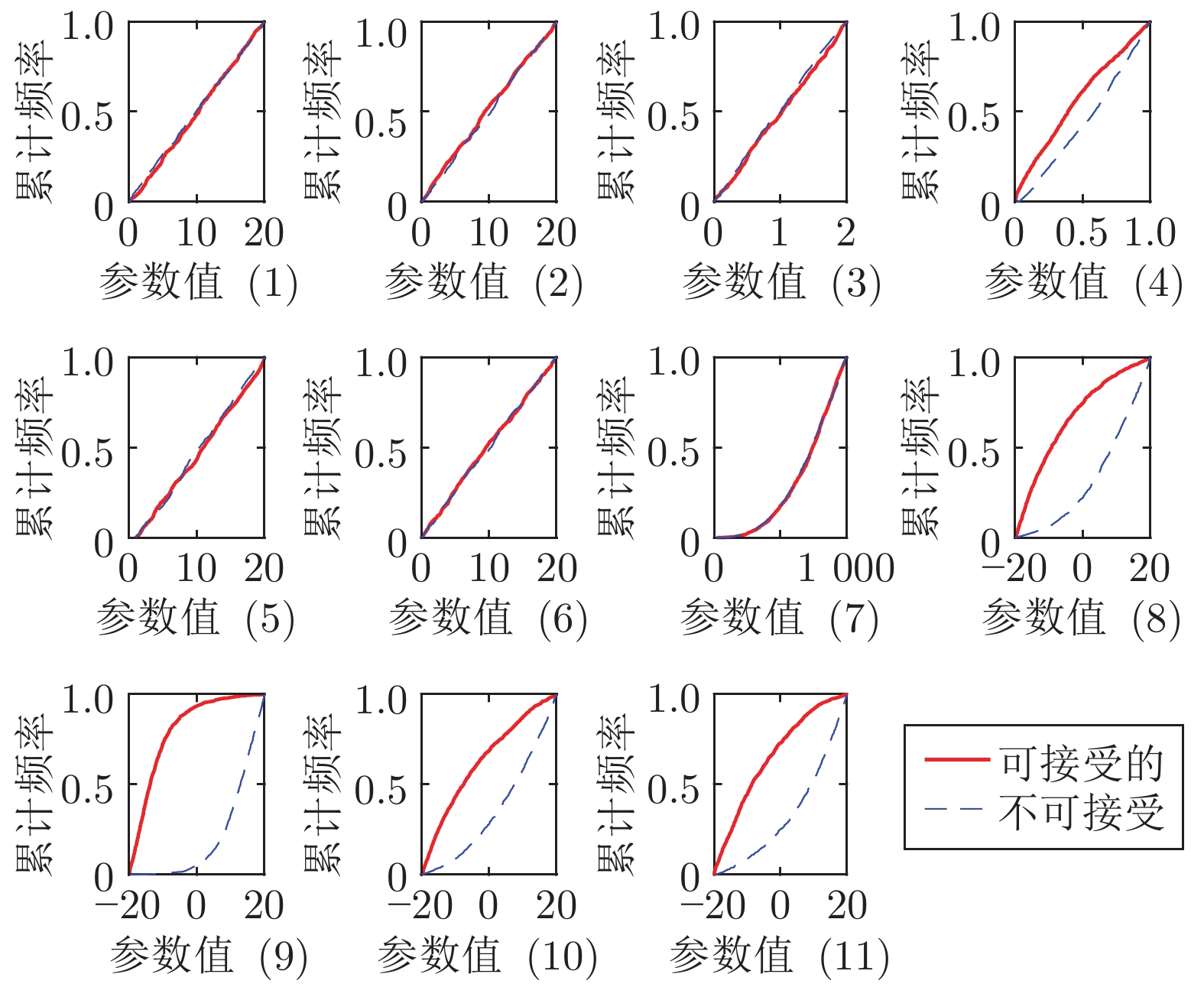
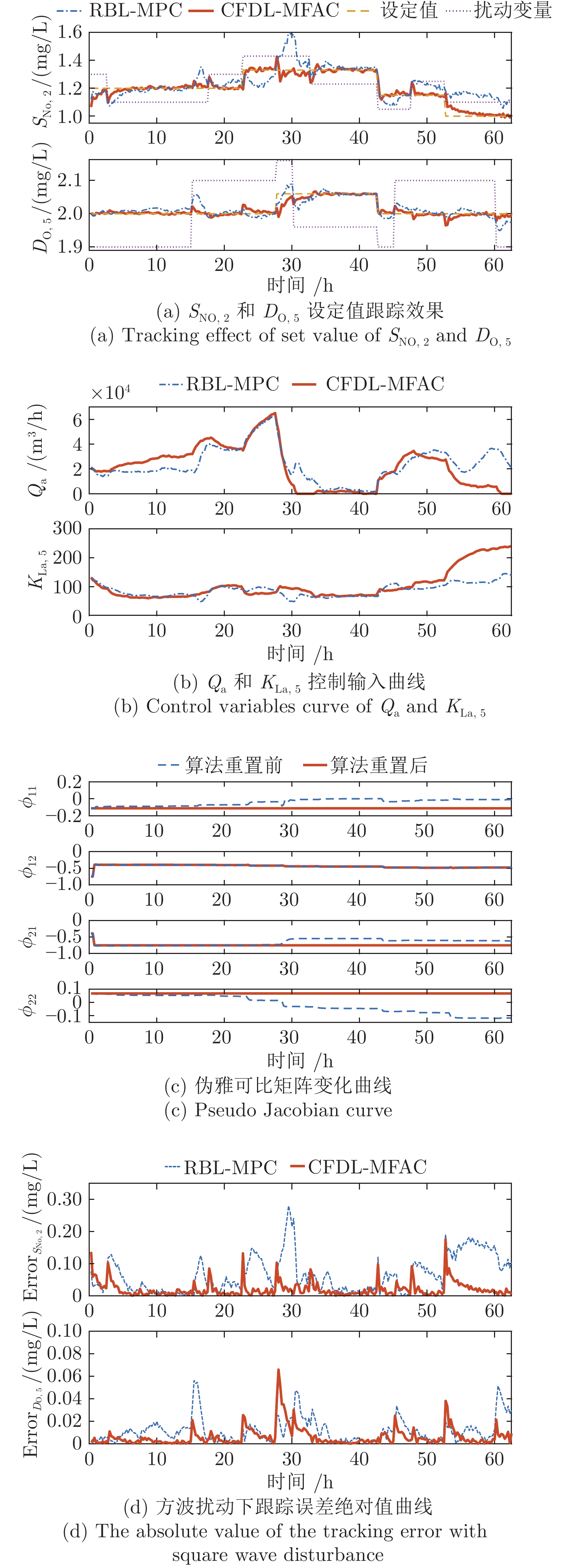
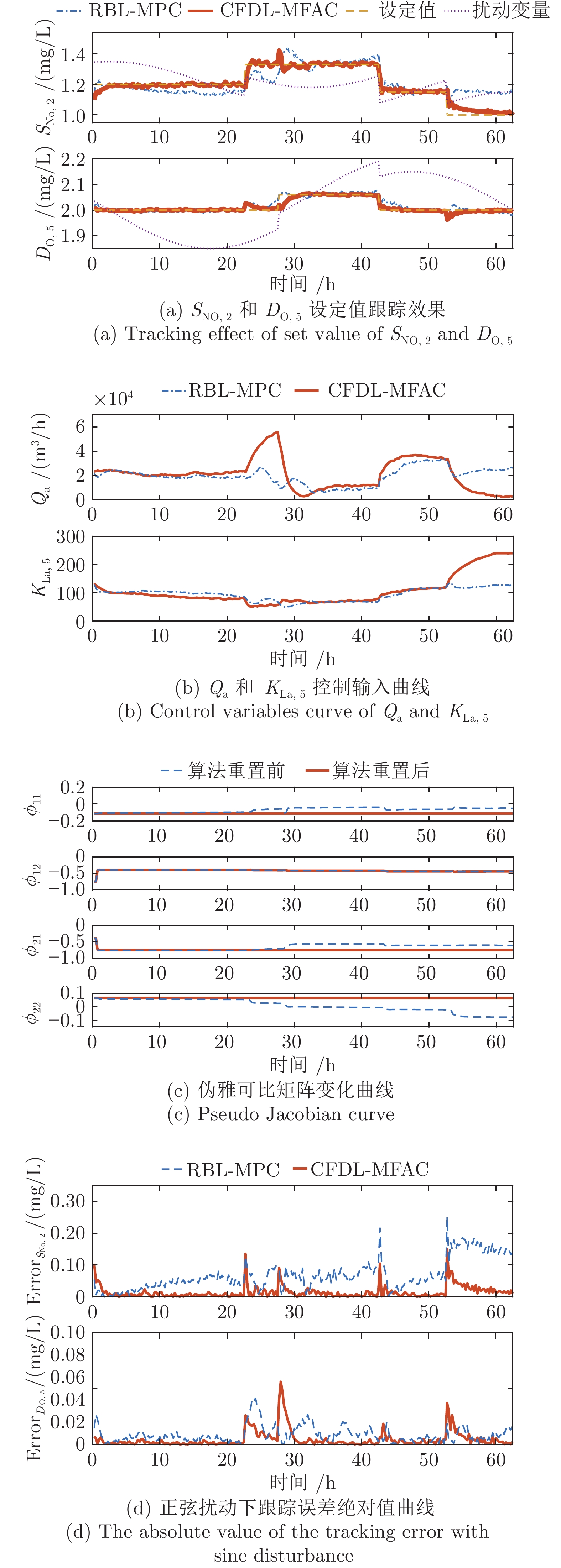
污水处理过程中, 生化反应硝态氮浓度和溶解氧浓度是决定出水水质好坏的两个最关键变量, 难以采用常规基于模型的方法进行有效控制. 本文基于数据驱动建模与控制技术, 提出一种污水处理过程递推双线性子空间辨识(Recursive bilinear subspace identification, RBLSI)建模和无模型自适应控制方法. 首先, 针对污水处理过程的非线性时变动态特性, 采用最小二乘递推双线性子空间辨识方法建立污水处理生化反应过程具有参数自适应能力的递推双线性模型; 其次, 基于建立的数据驱动模型, 采用基于多参数灵敏度分析(Multi-parameter sensitivity analysis, MPSA)和遗传粒子群优化(Genetic algorithm-particle swarm optimization, GA-PSO)算法的无模型自适应控制(Model-free adaptive control, MFAC)方法对硝态氮和溶解氧浓度进行直接数据驱动控制; 最后, 数据实验及其比较分析表明了所提方法的有效性和优越性.
污水处理过程中, 生化反应硝态氮浓度和溶解氧浓度是决定出水水质好坏的两个最关键变量, 难以采用常规基于模型的方法进行有效控制. 本文基于数据驱动建模与控制技术, 提出一种污水处理过程递推双线性子空间辨识(Recursive bilinear subspace identification, RBLSI)建模和无模型自适应控制方法. 首先, 针对污水处理过程的非线性时变动态特性, 采用最小二乘递推双线性子空间辨识方法建立污水处理生化反应过程具有参数自适应能力的递推双线性模型; 其次, 基于建立的数据驱动模型, 采用基于多参数灵敏度分析(Multi-parameter sensitivity analysis, MPSA)和遗传粒子群优化(Genetic algorithm-particle swarm optimization, GA-PSO)算法的无模型自适应控制(Model-free adaptive control, MFAC)方法对硝态氮和溶解氧浓度进行直接数据驱动控制; 最后, 数据实验及其比较分析表明了所提方法的有效性和优越性.

2022, 48(7): 1760-1770.
doi: 10.16383/j.aas.c190350
摘要:
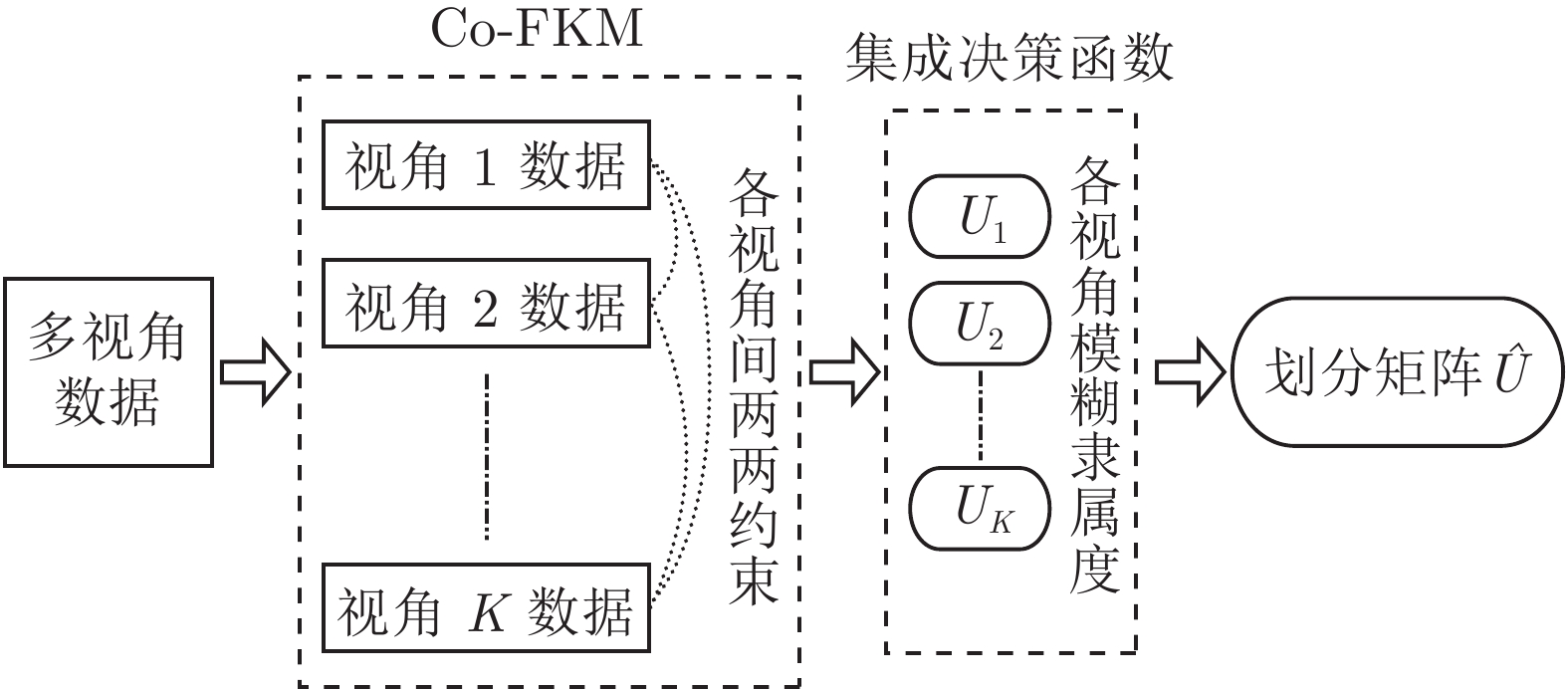
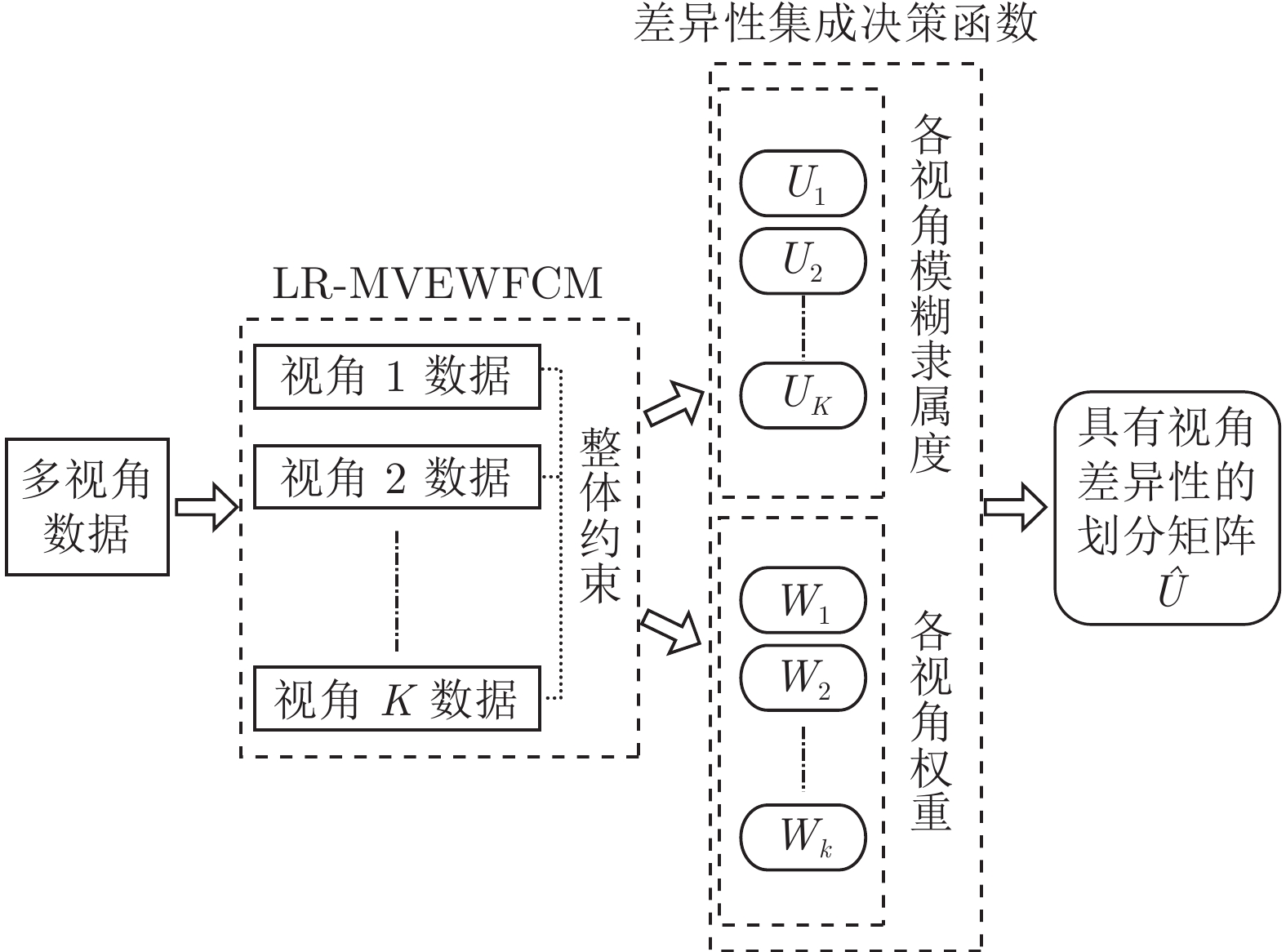
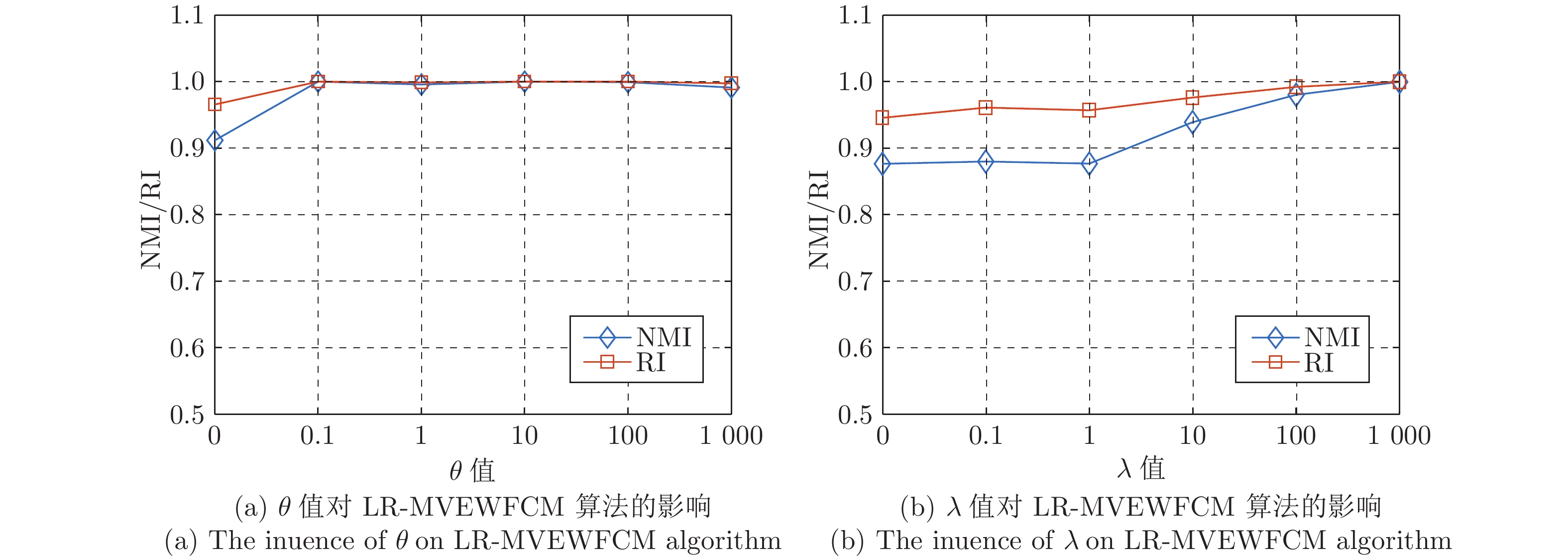
如何有效挖掘多视角数据内部的一致性以及差异性是构建多视角模糊聚类算法的两个重要问题. 本文在Co-FKM算法框架上, 提出了基于低秩约束的熵加权多视角模糊聚类算法(Entropy-weighting multi-view fuzzy C-means with low rank constraint, LR-MVEWFCM). 一方面, 从视角之间的一致性出发, 引入核范数对多个视角之间的模糊隶属度矩阵进行低秩约束; 另一方面, 基于香农熵理论引入视角权重自适应调整策略, 使算法根据各视角的重要程度来处理视角间的差异性. 本文使用交替方向乘子法(Alternating direction method of multipliers, ADMM)进行目标函数的优化. 最后, 人工模拟数据集和UCI (University of California Irvine)数据集上进行的实验结果验证了该方法的有效性.
如何有效挖掘多视角数据内部的一致性以及差异性是构建多视角模糊聚类算法的两个重要问题. 本文在Co-FKM算法框架上, 提出了基于低秩约束的熵加权多视角模糊聚类算法(Entropy-weighting multi-view fuzzy C-means with low rank constraint, LR-MVEWFCM). 一方面, 从视角之间的一致性出发, 引入核范数对多个视角之间的模糊隶属度矩阵进行低秩约束; 另一方面, 基于香农熵理论引入视角权重自适应调整策略, 使算法根据各视角的重要程度来处理视角间的差异性. 本文使用交替方向乘子法(Alternating direction method of multipliers, ADMM)进行目标函数的优化. 最后, 人工模拟数据集和UCI (University of California Irvine)数据集上进行的实验结果验证了该方法的有效性.



2022, 48(7): 1771-1781.
doi: 10.16383/j.aas.c200341
摘要:
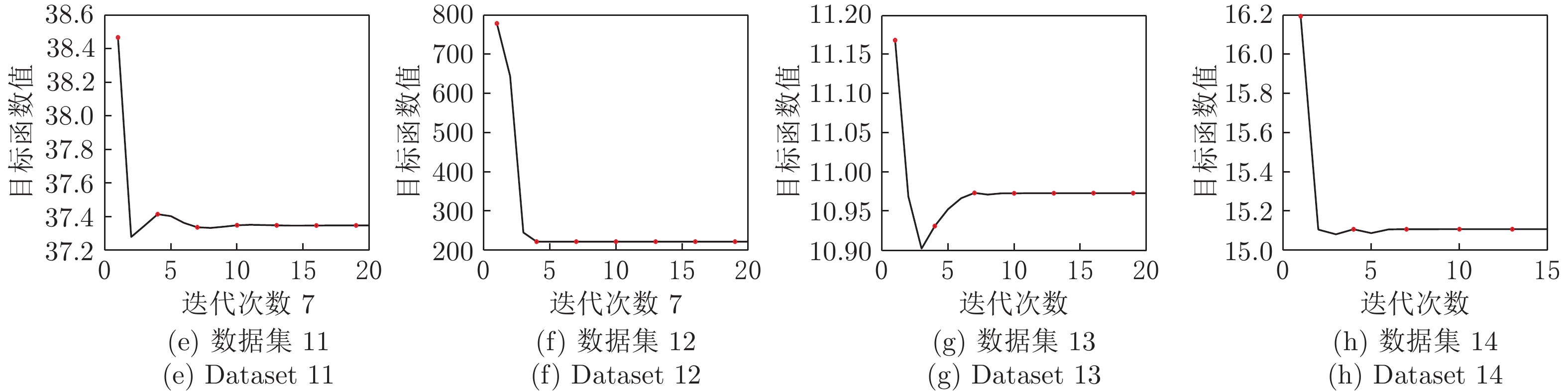
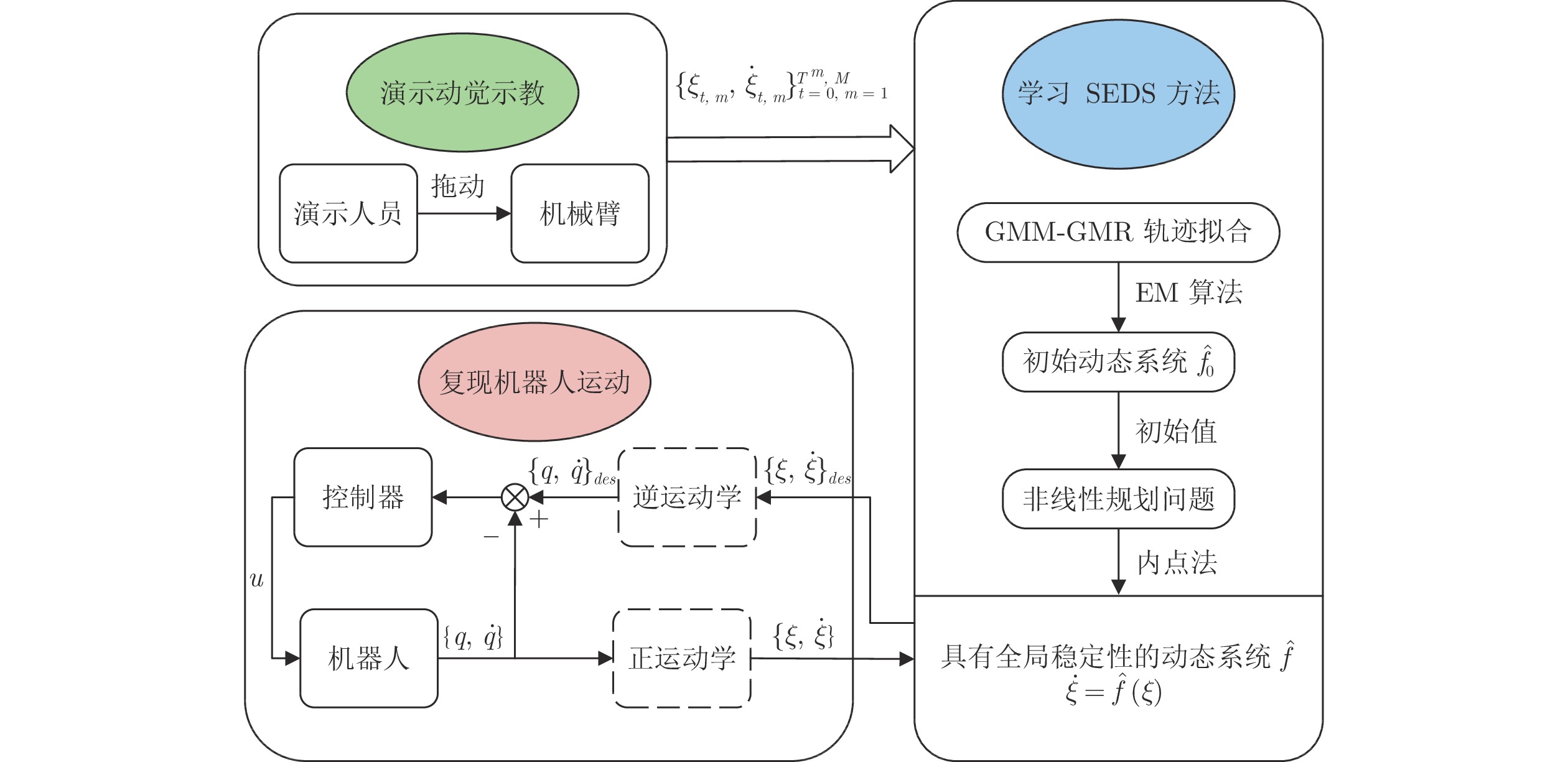
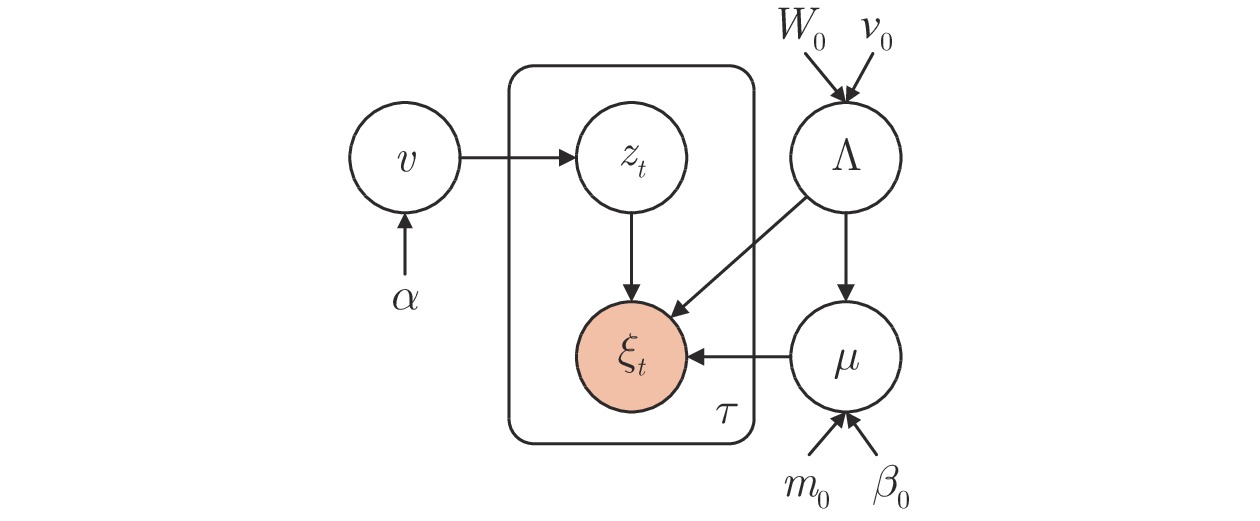
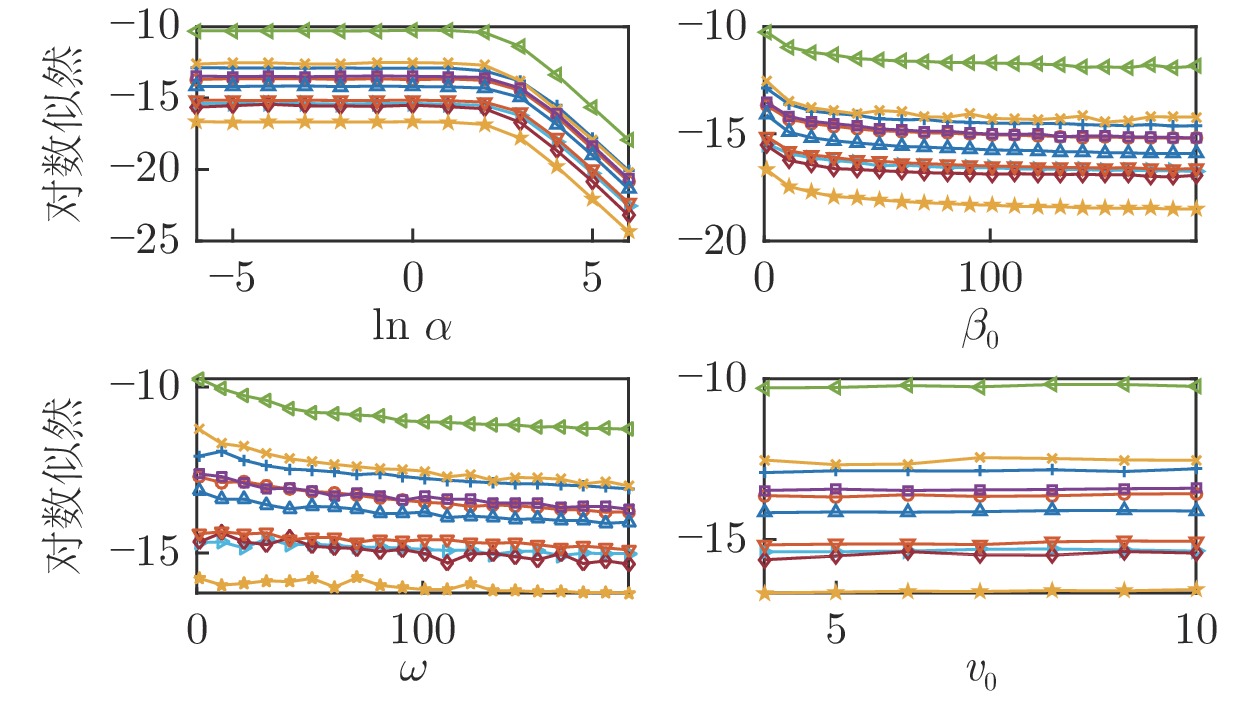
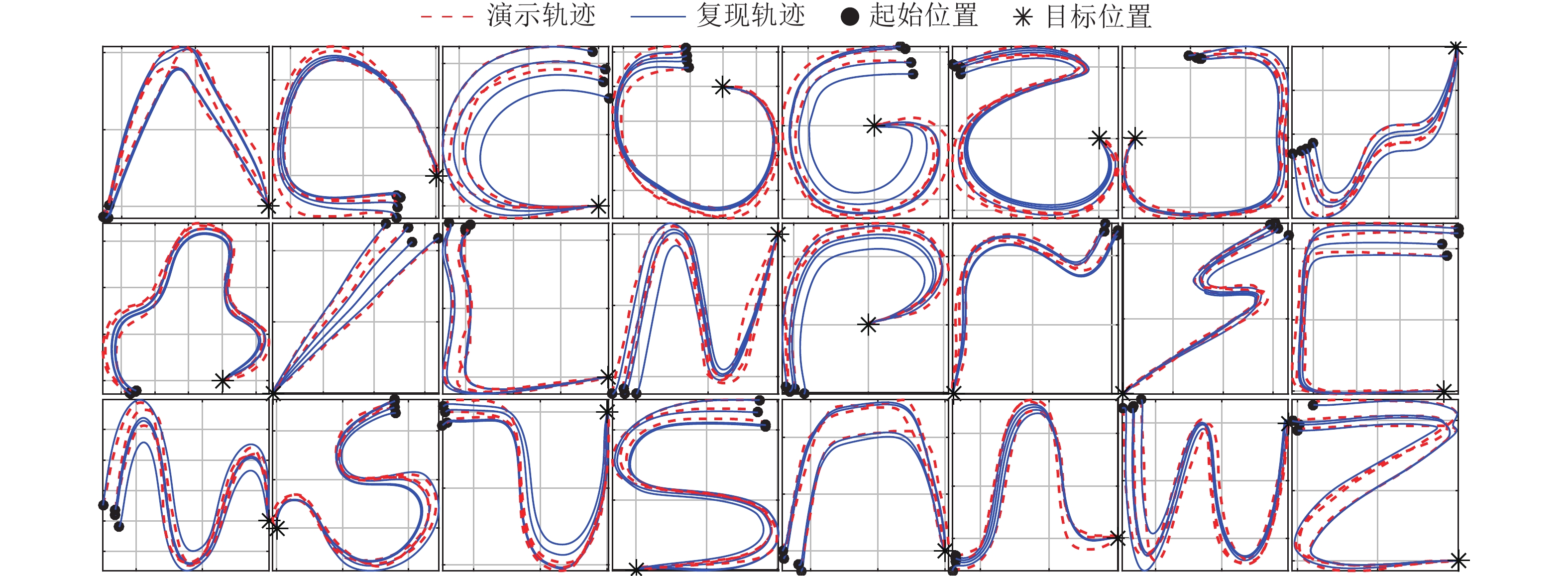
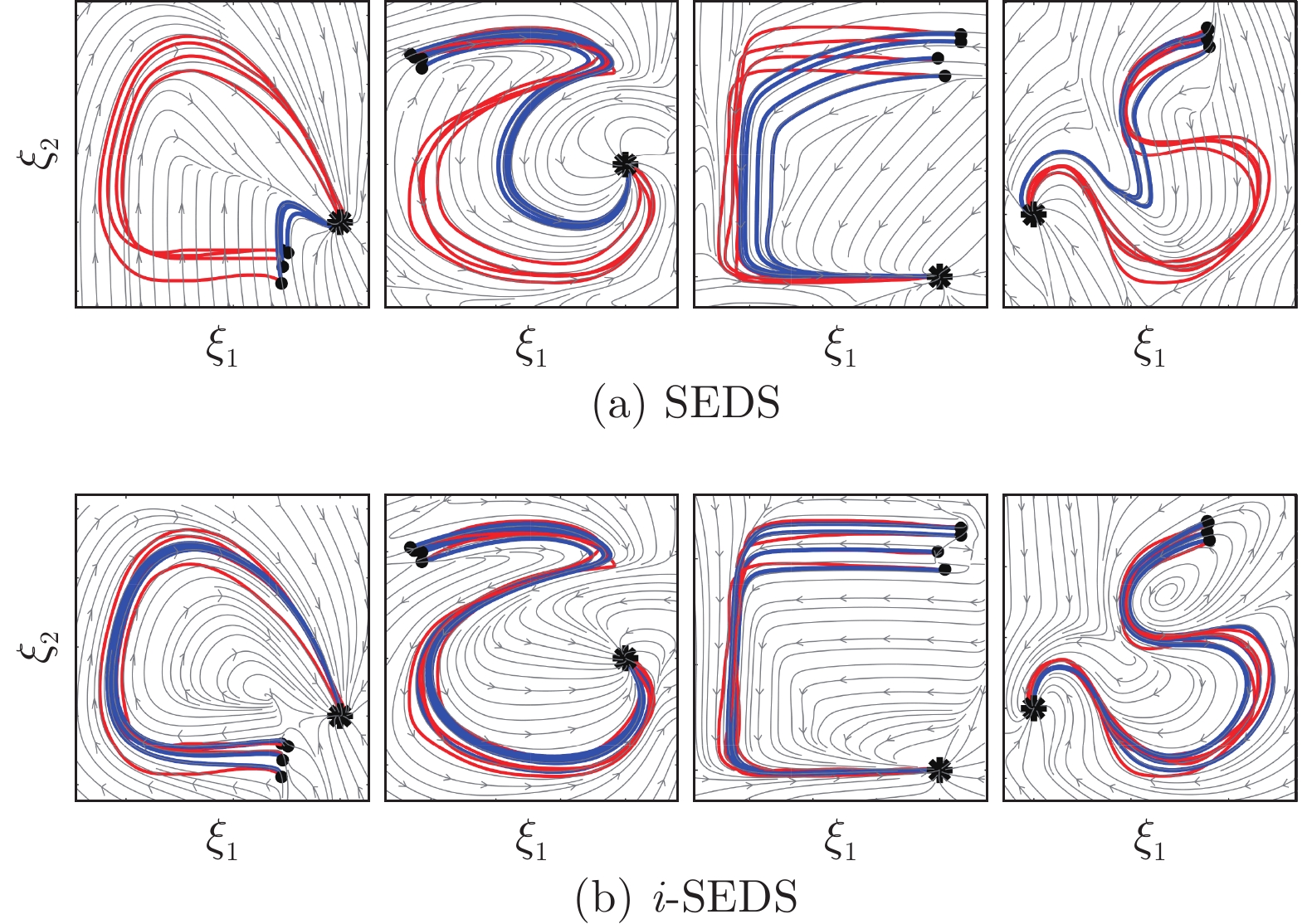
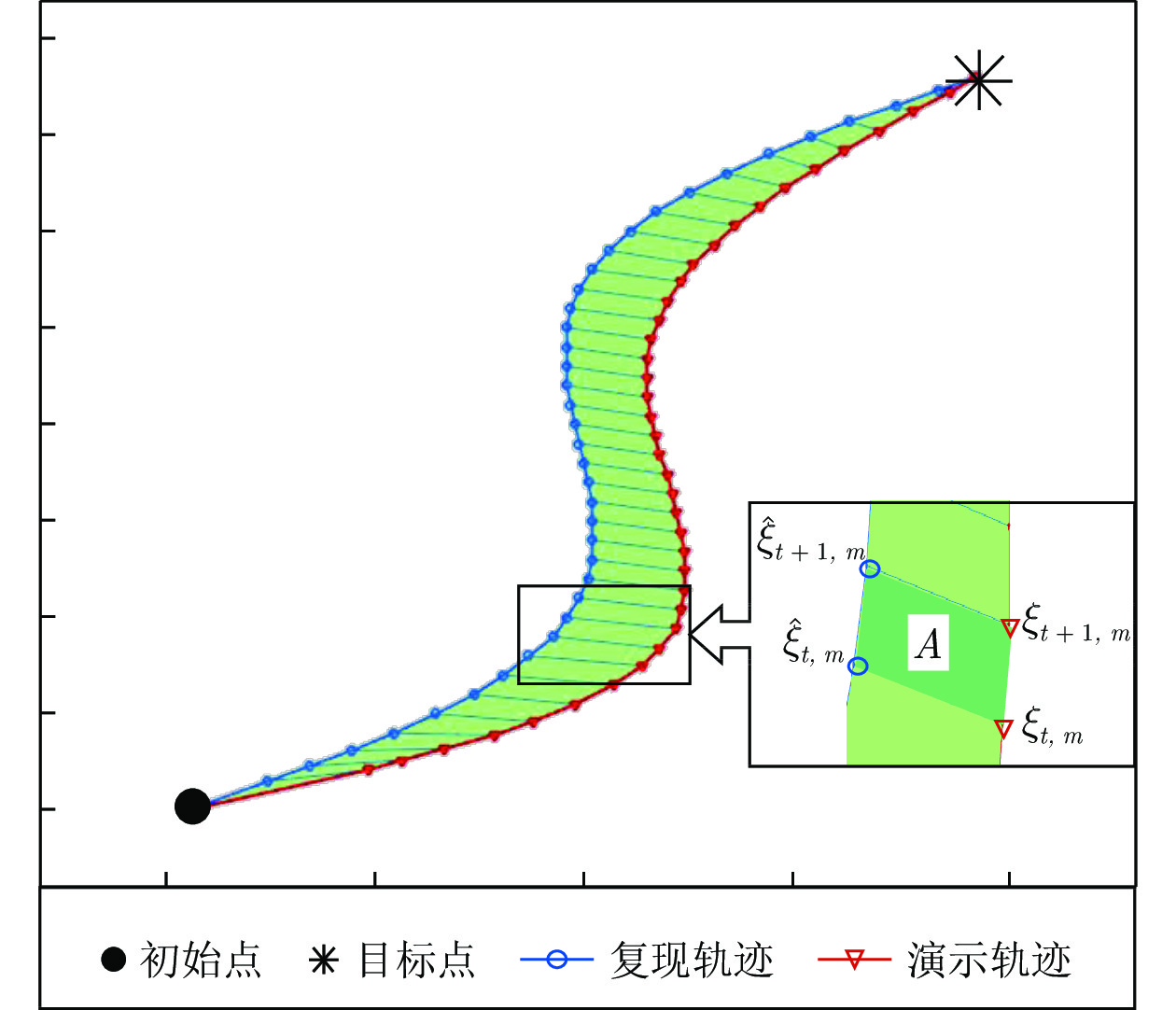
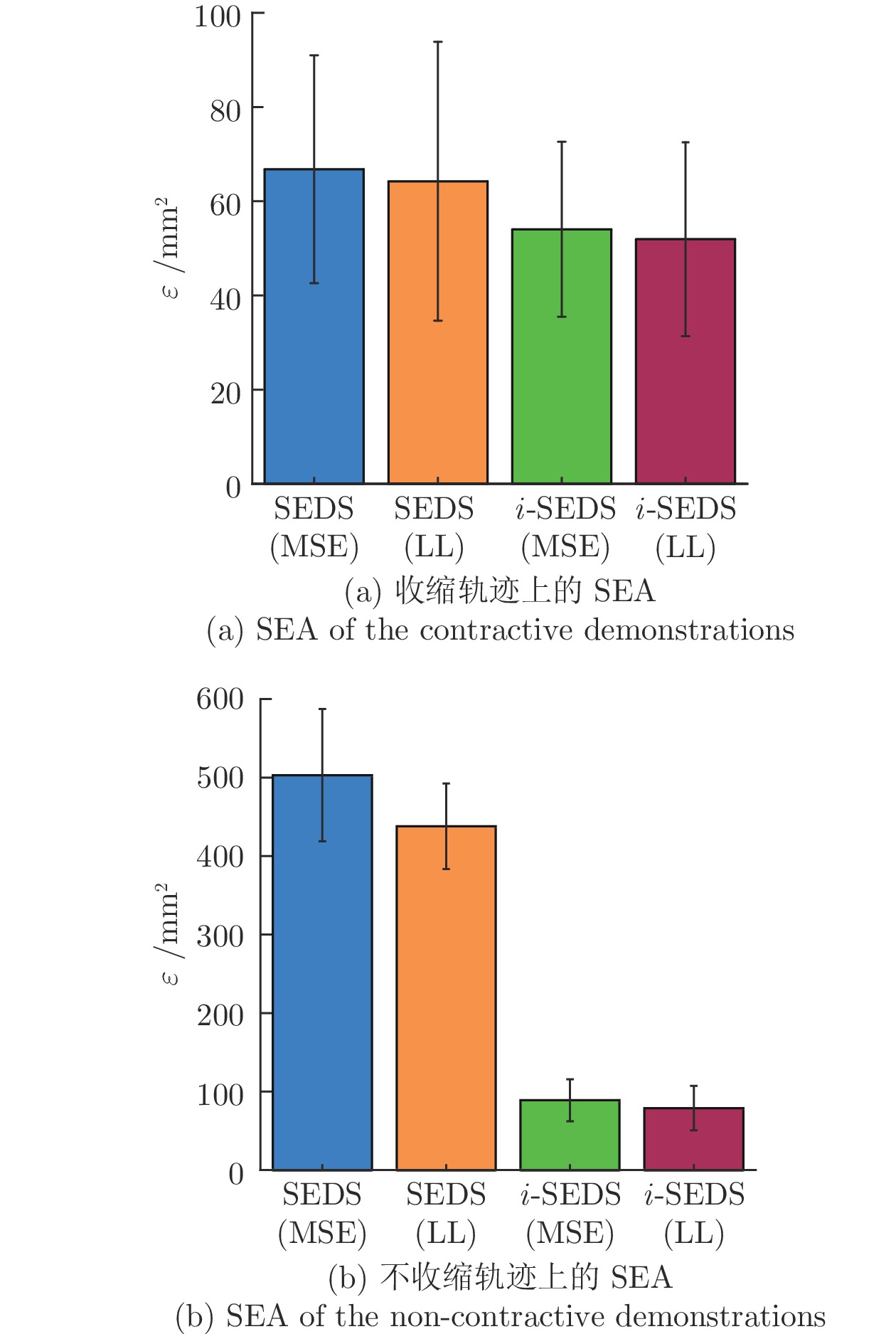
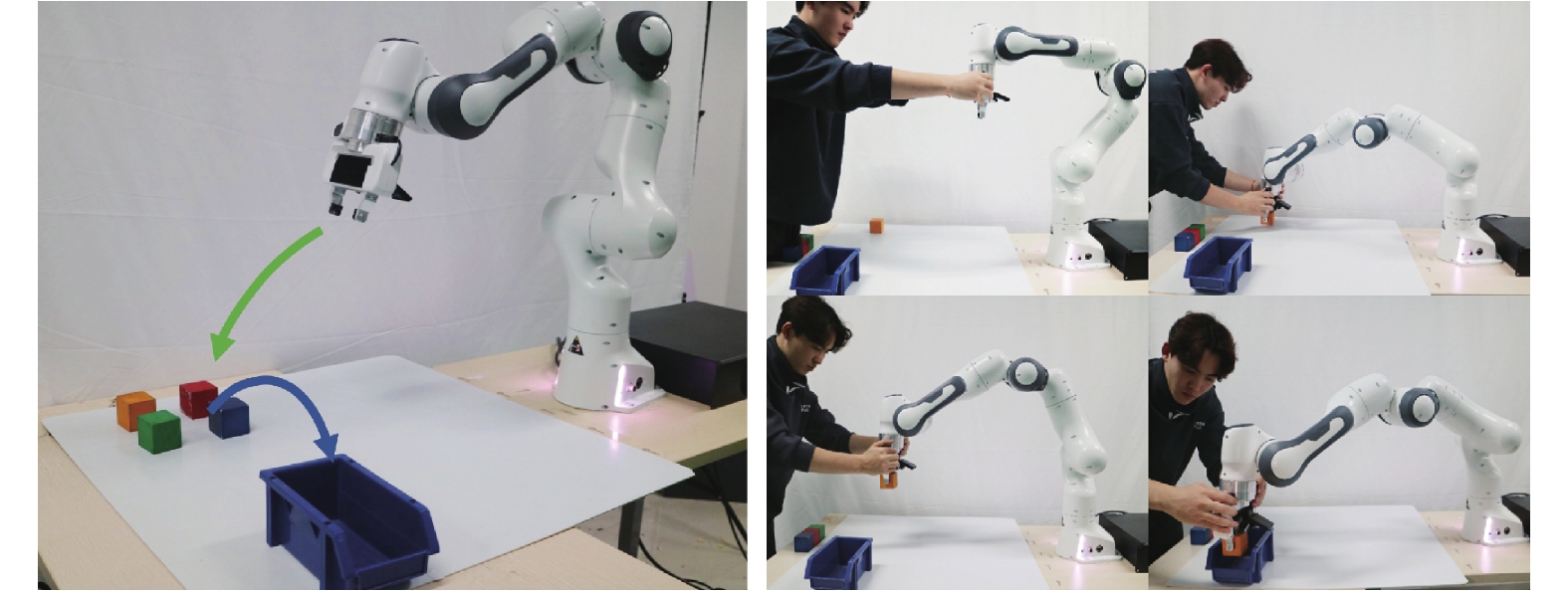
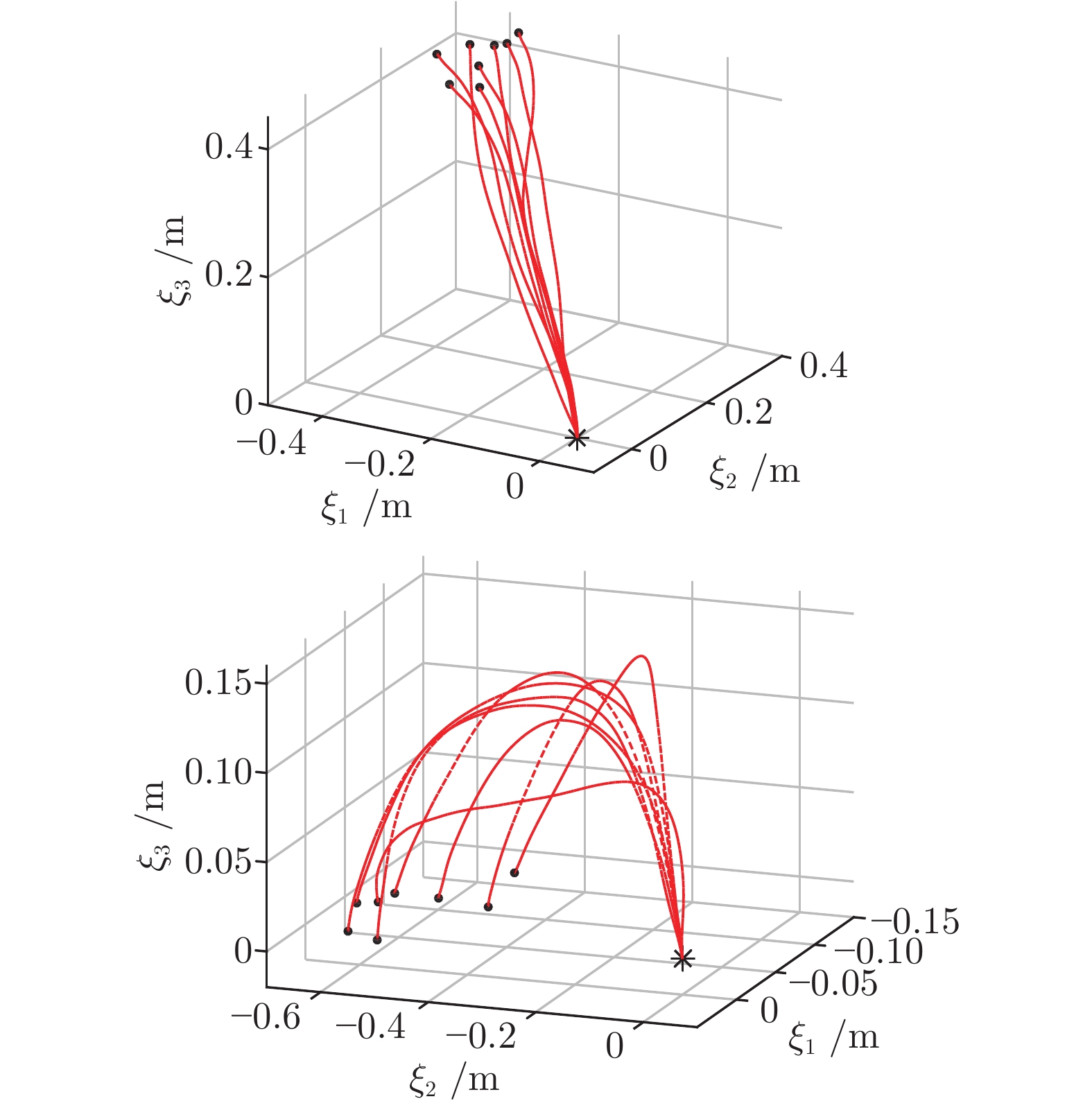
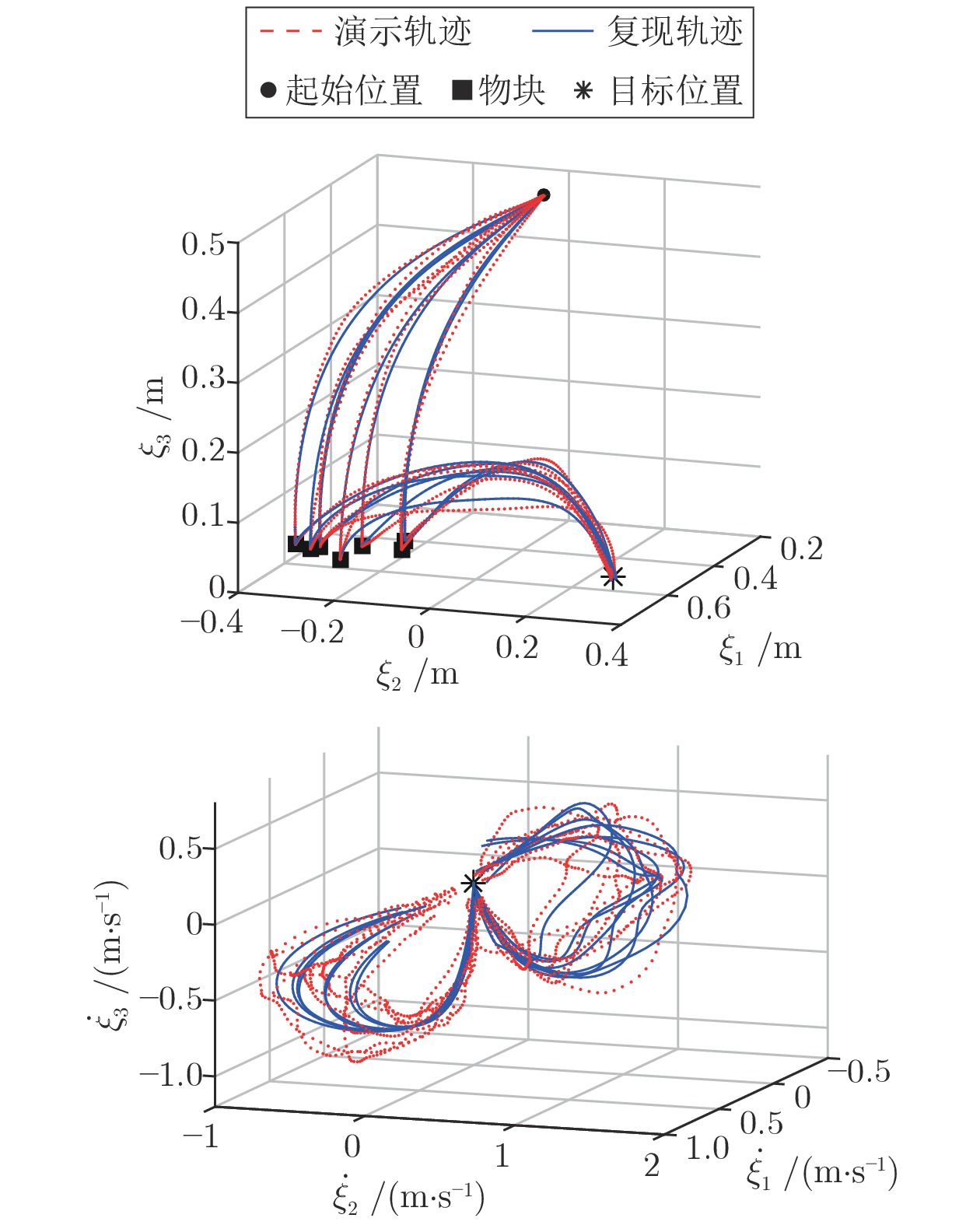
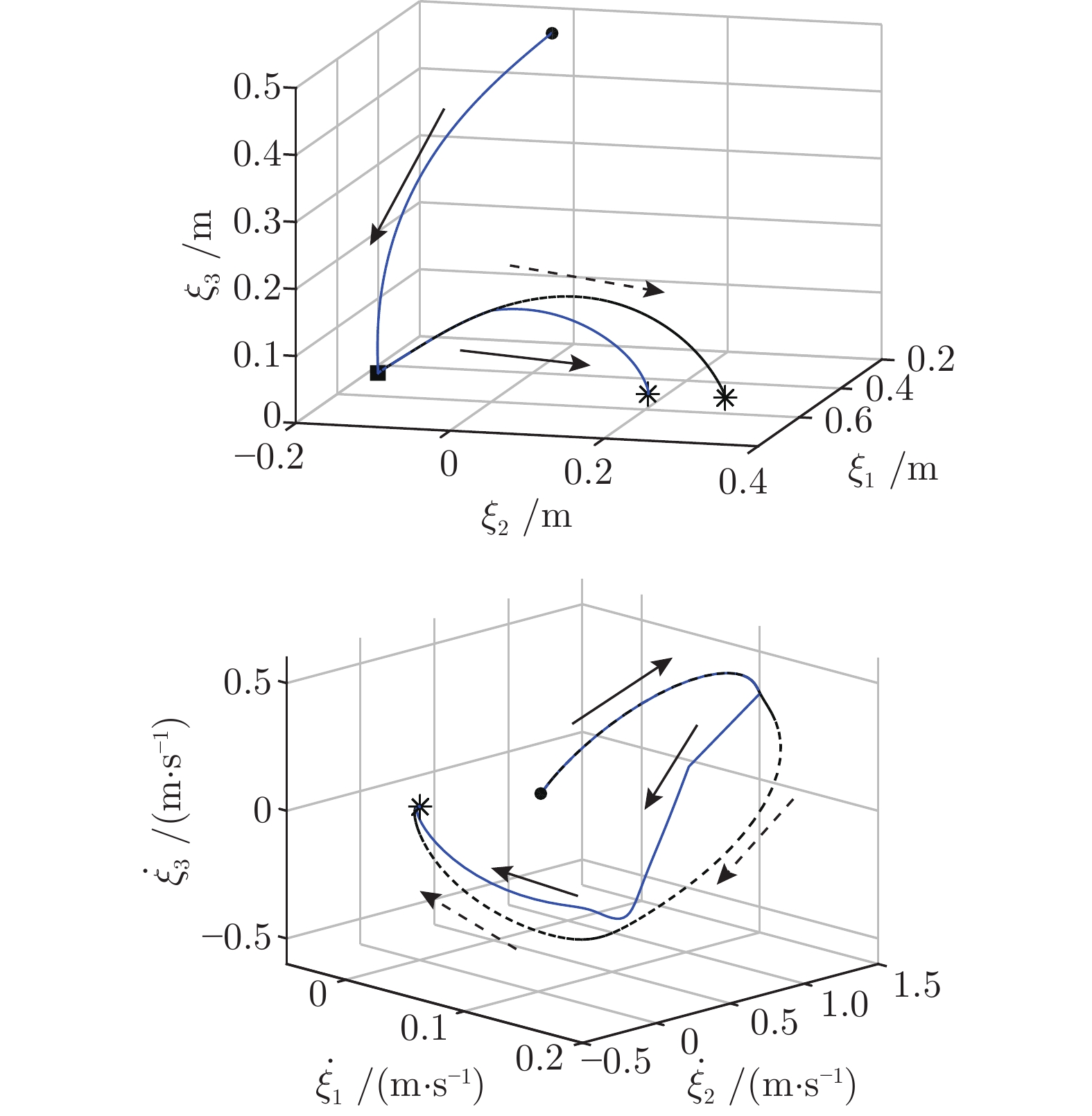
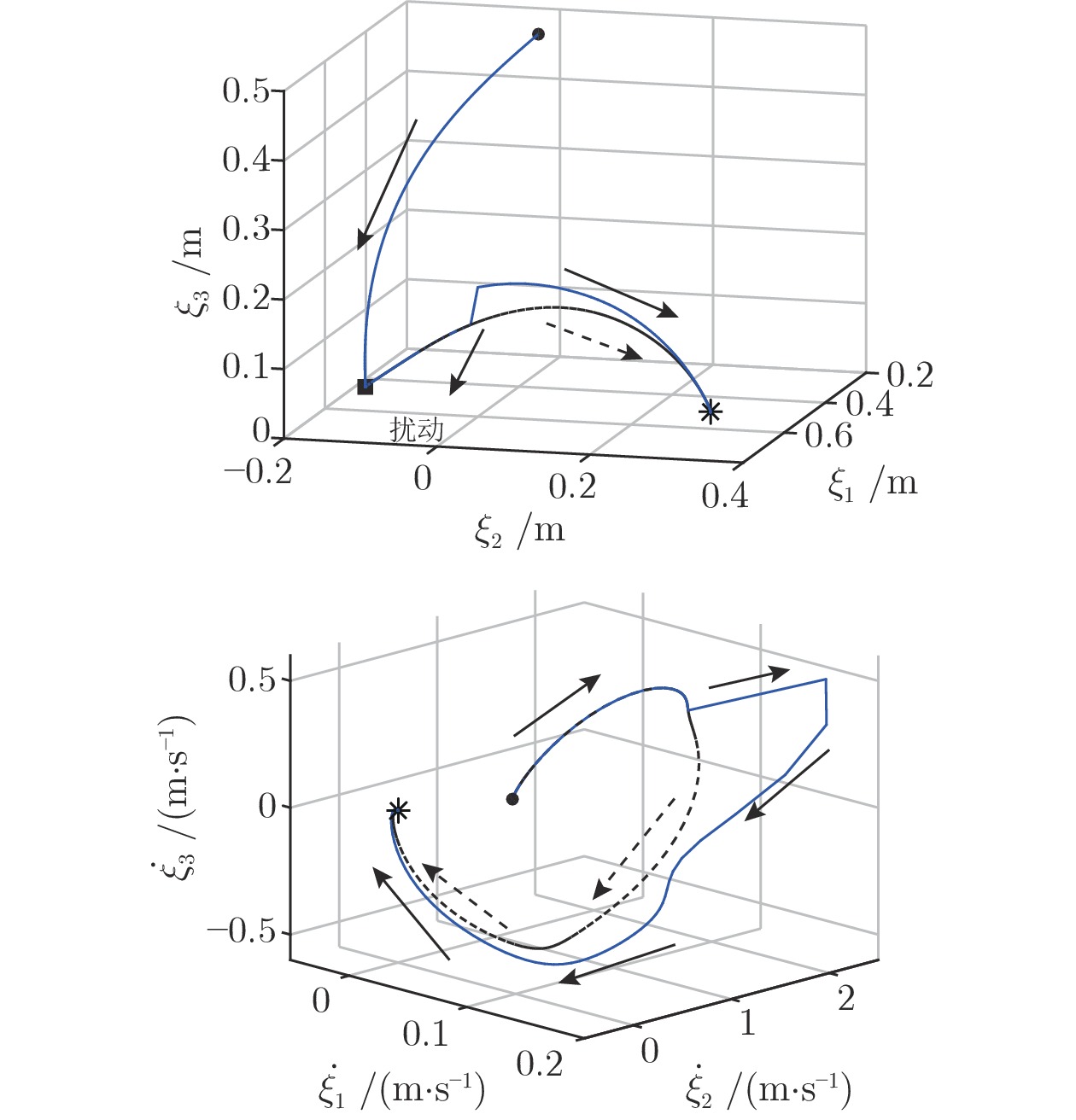
提出一种基于改进动态系统稳定估计器的机器人技能学习方法. 现有的动态系统稳定估计器方法可以通过非线性优化来确保学习系统的全局稳定性, 但是存在确定高斯混合分量个数困难以及稳定性和精度无法兼顾的问题. 因此, 根据贝叶斯非参数模型可以自动确定合适分量个数的特性, 采用狄利克雷过程高斯混合模型对演示进行初始拟合. 随后利用参数化二次李雅普诺夫函数重新推导新的稳定性约束, 有效地解决了动态系统稳定估计器方法中稳定性和精度难以兼顾的问题. 最后, 在LASA数据库和Franka-panda机器人上的实验验证了新方法的有效性和优越性.
提出一种基于改进动态系统稳定估计器的机器人技能学习方法. 现有的动态系统稳定估计器方法可以通过非线性优化来确保学习系统的全局稳定性, 但是存在确定高斯混合分量个数困难以及稳定性和精度无法兼顾的问题. 因此, 根据贝叶斯非参数模型可以自动确定合适分量个数的特性, 采用狄利克雷过程高斯混合模型对演示进行初始拟合. 随后利用参数化二次李雅普诺夫函数重新推导新的稳定性约束, 有效地解决了动态系统稳定估计器方法中稳定性和精度难以兼顾的问题. 最后, 在LASA数据库和Franka-panda机器人上的实验验证了新方法的有效性和优越性.
2022, 48(7): 1782-1793.
doi: 10.16383/j.aas.c200666
摘要:
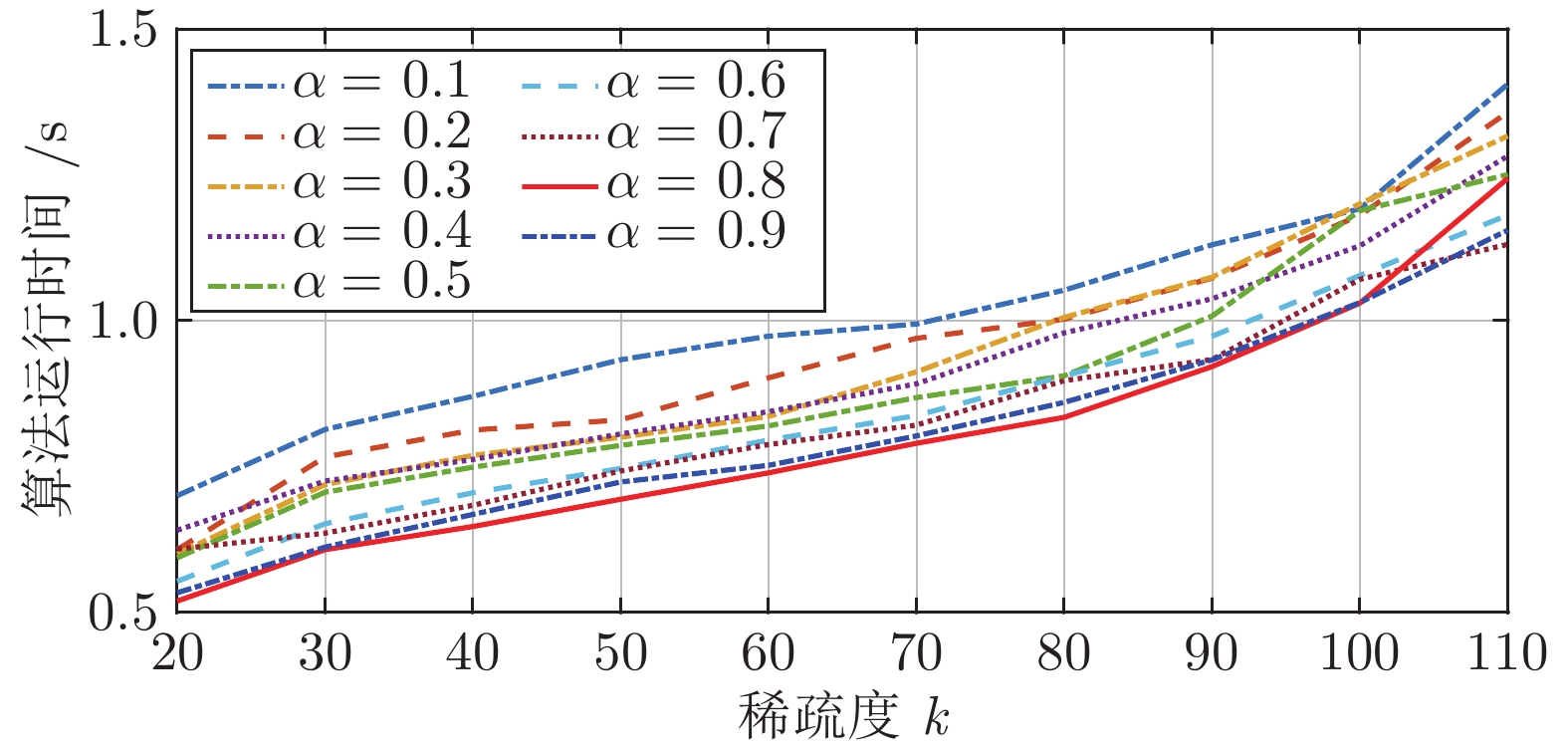
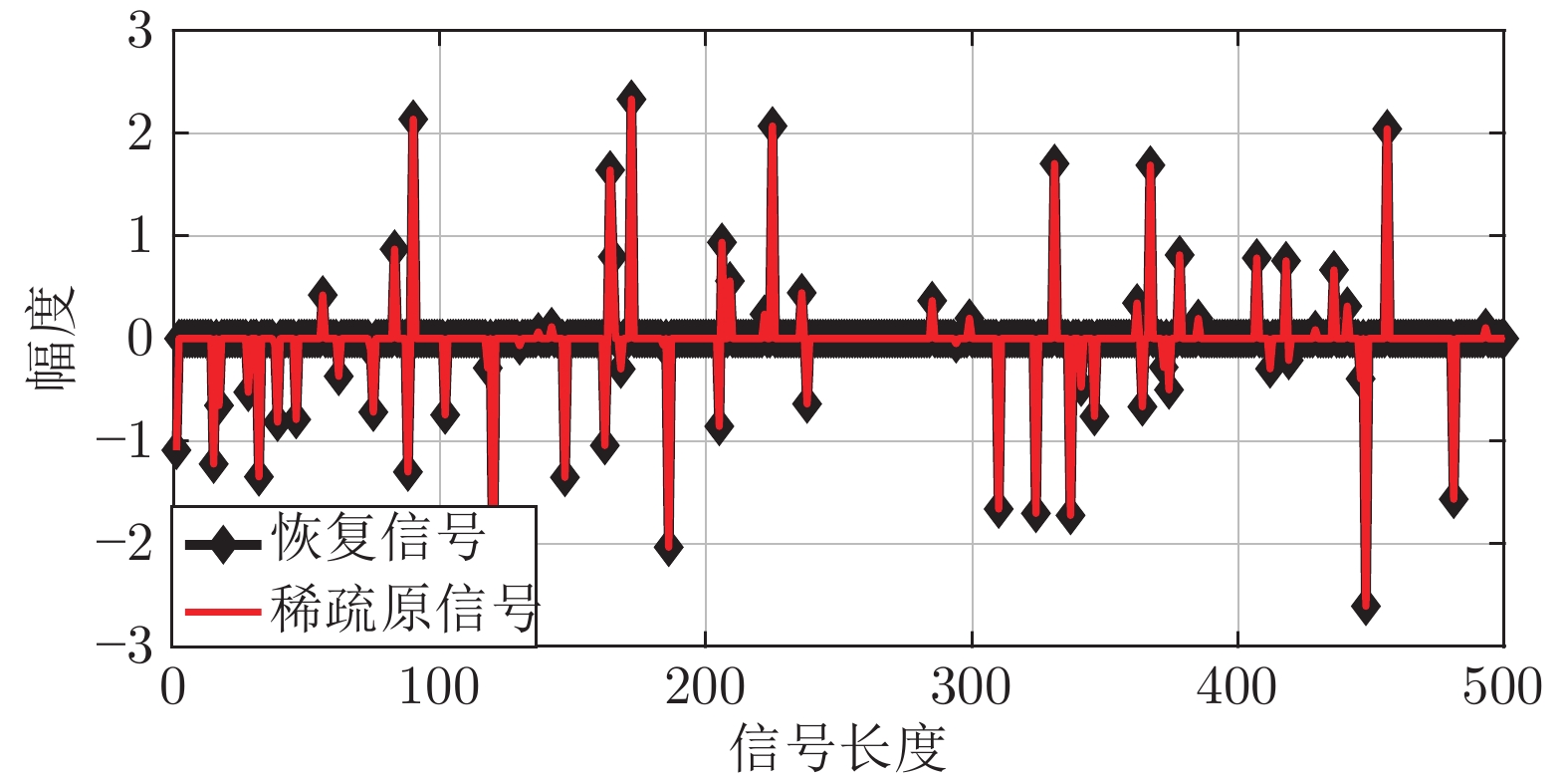
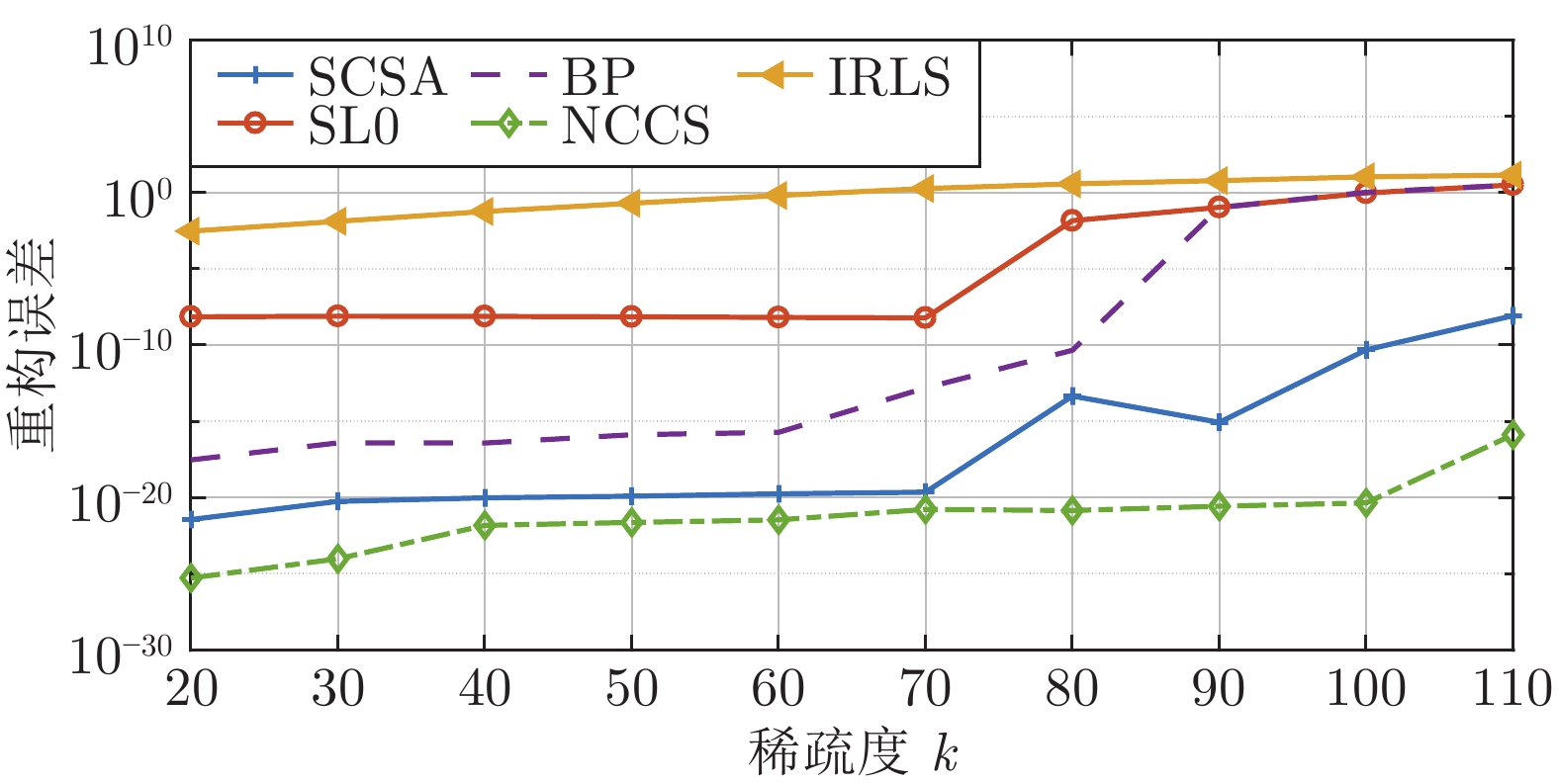
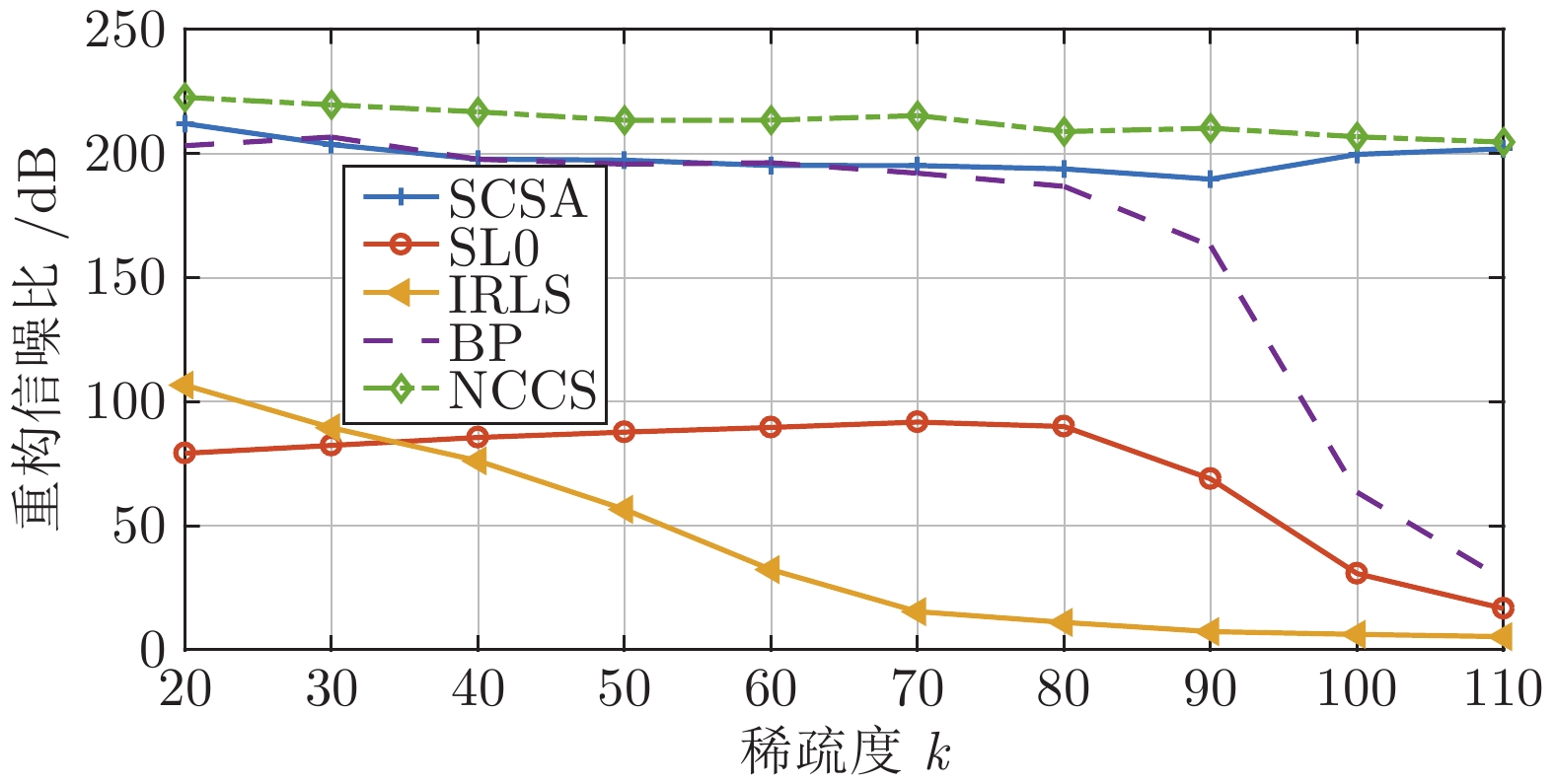
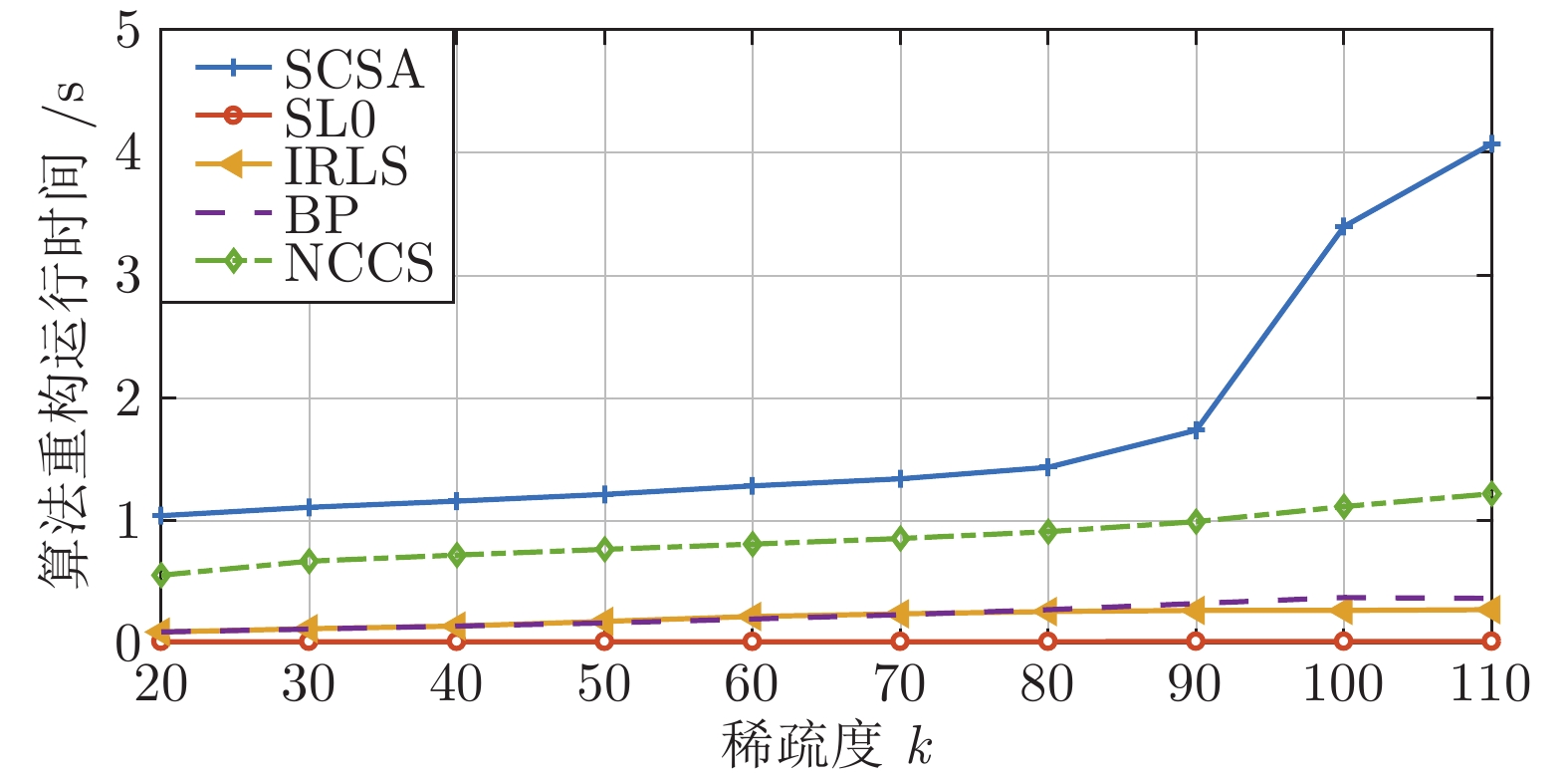
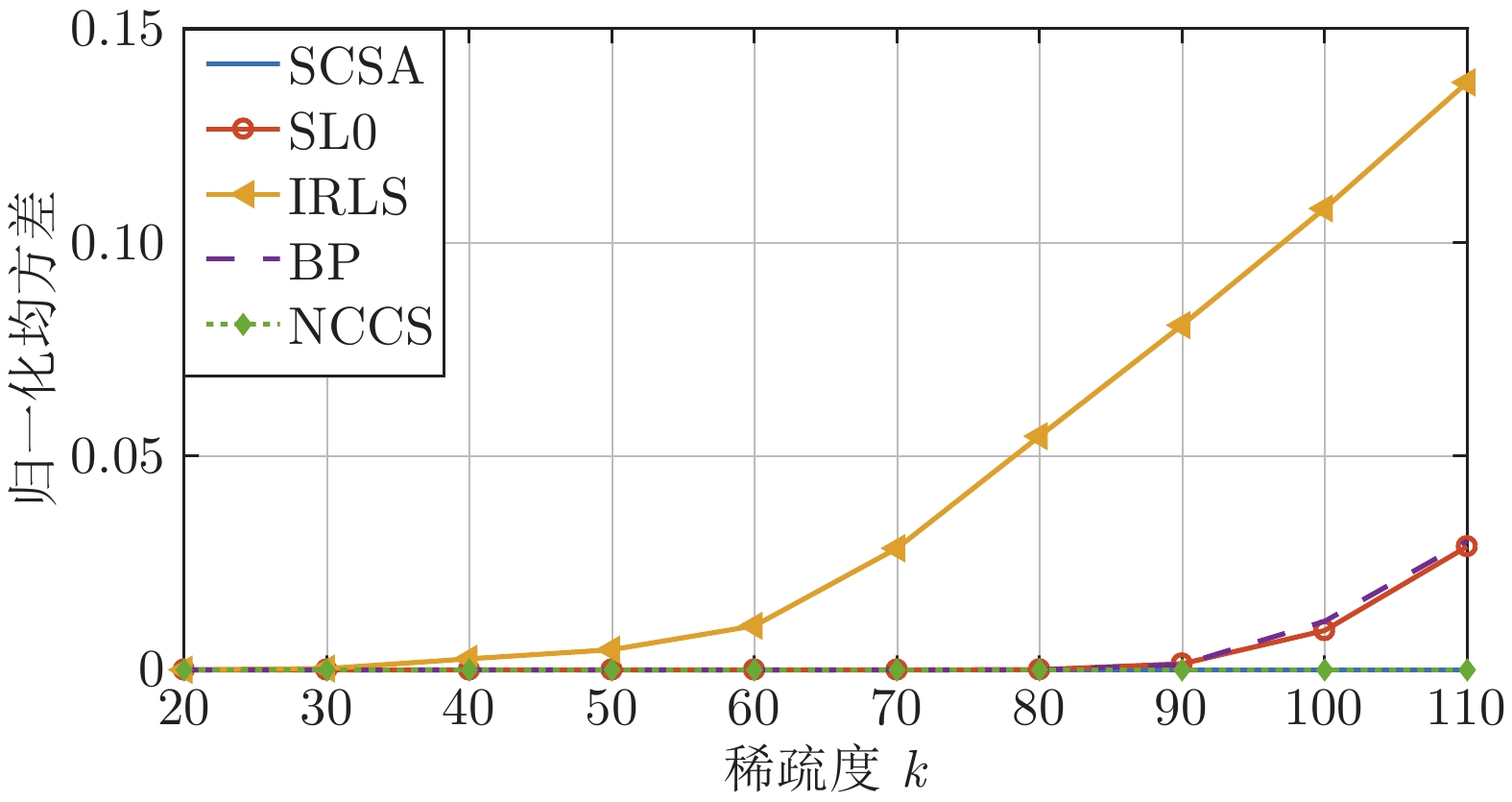
基于泛函深度作用的思想, 通过将两种非凸稀疏泛函进行复合, 构造了一种新的稀疏信号重构模型, 实现了对0范数的深度逼近. 综合运用MM (Majorize minimization)技术、外点罚函数法和共轭梯度法, 提出一种求解该模型的算法, 称为NCCS (Non-convex composite sparse)算法. 为降低重构信号陷入局部极值的可能性, 提出在算法的每步迭代中以BP (Basis pursuit)模型的解作为初始迭代值. 为验证所建模型和所提算法的有效性, 进行了多项数值实验. 实验结果表明, 相较于SL0 (Smoothed\begin{document}$L_0$\end{document} ![]()
![]()
基于泛函深度作用的思想, 通过将两种非凸稀疏泛函进行复合, 构造了一种新的稀疏信号重构模型, 实现了对0范数的深度逼近. 综合运用MM (Majorize minimization)技术、外点罚函数法和共轭梯度法, 提出一种求解该模型的算法, 称为NCCS (Non-convex composite sparse)算法. 为降低重构信号陷入局部极值的可能性, 提出在算法的每步迭代中以BP (Basis pursuit)模型的解作为初始迭代值. 为验证所建模型和所提算法的有效性, 进行了多项数值实验. 实验结果表明, 相较于SL0 (Smoothed

2022, 48(7): 1794-1804.
doi: 10.16383/j.aas.c190670
摘要:
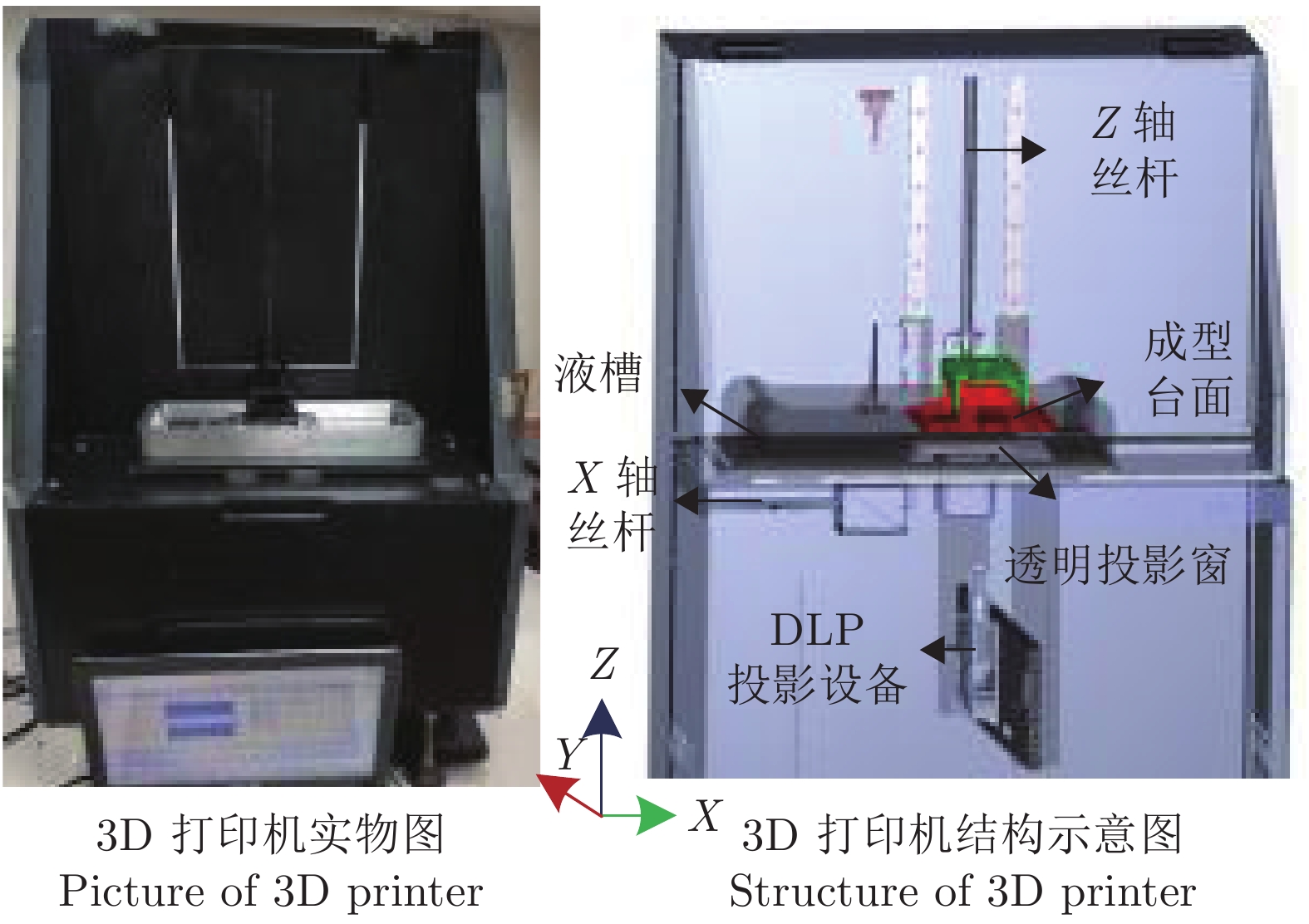
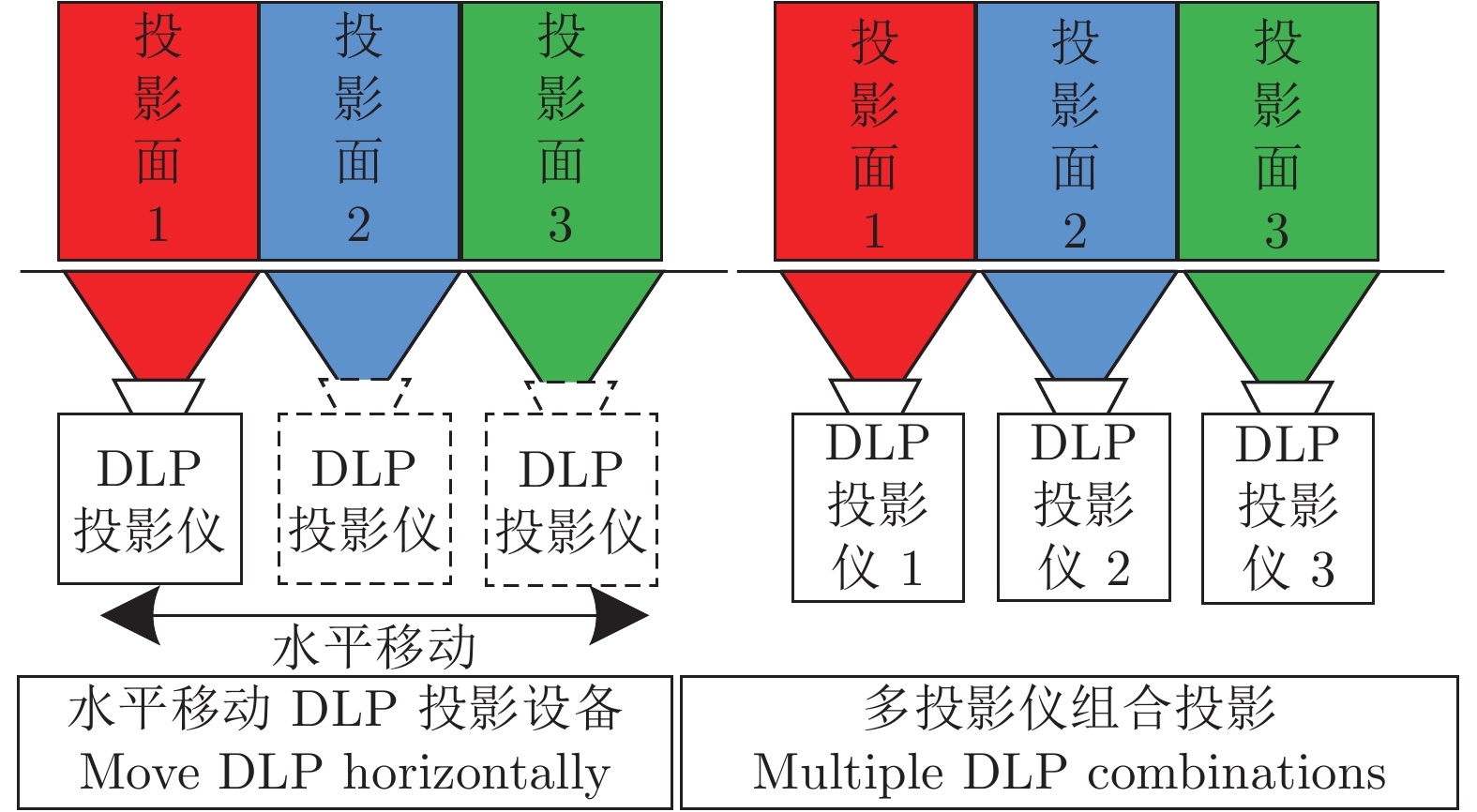
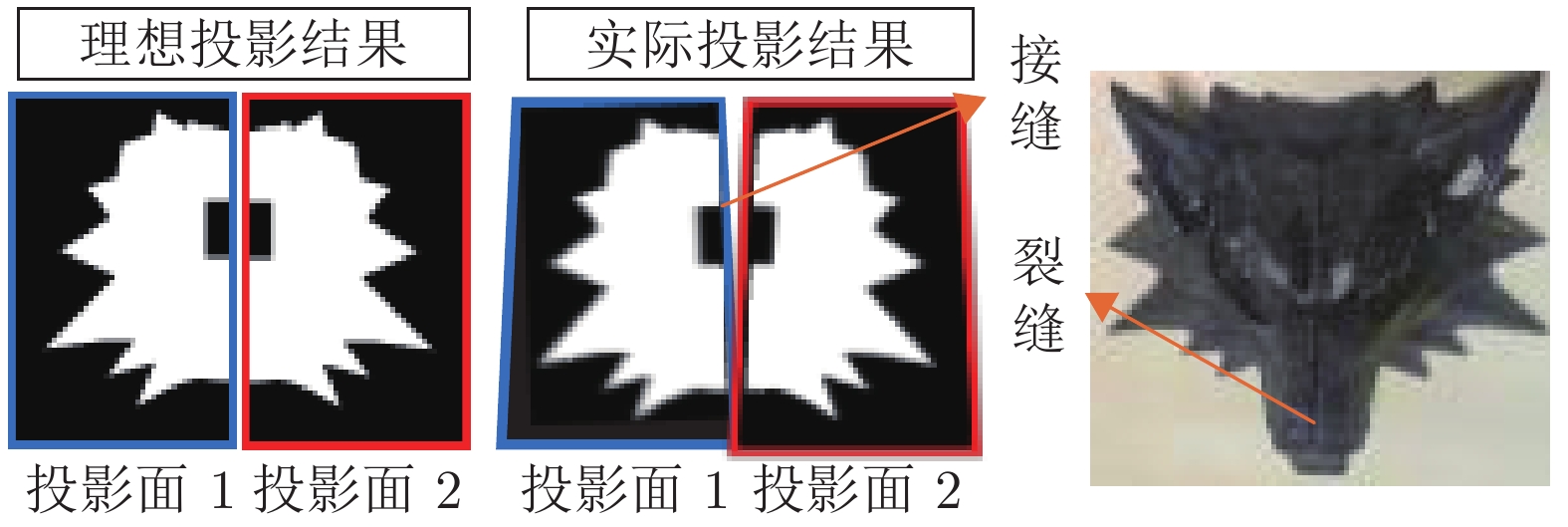
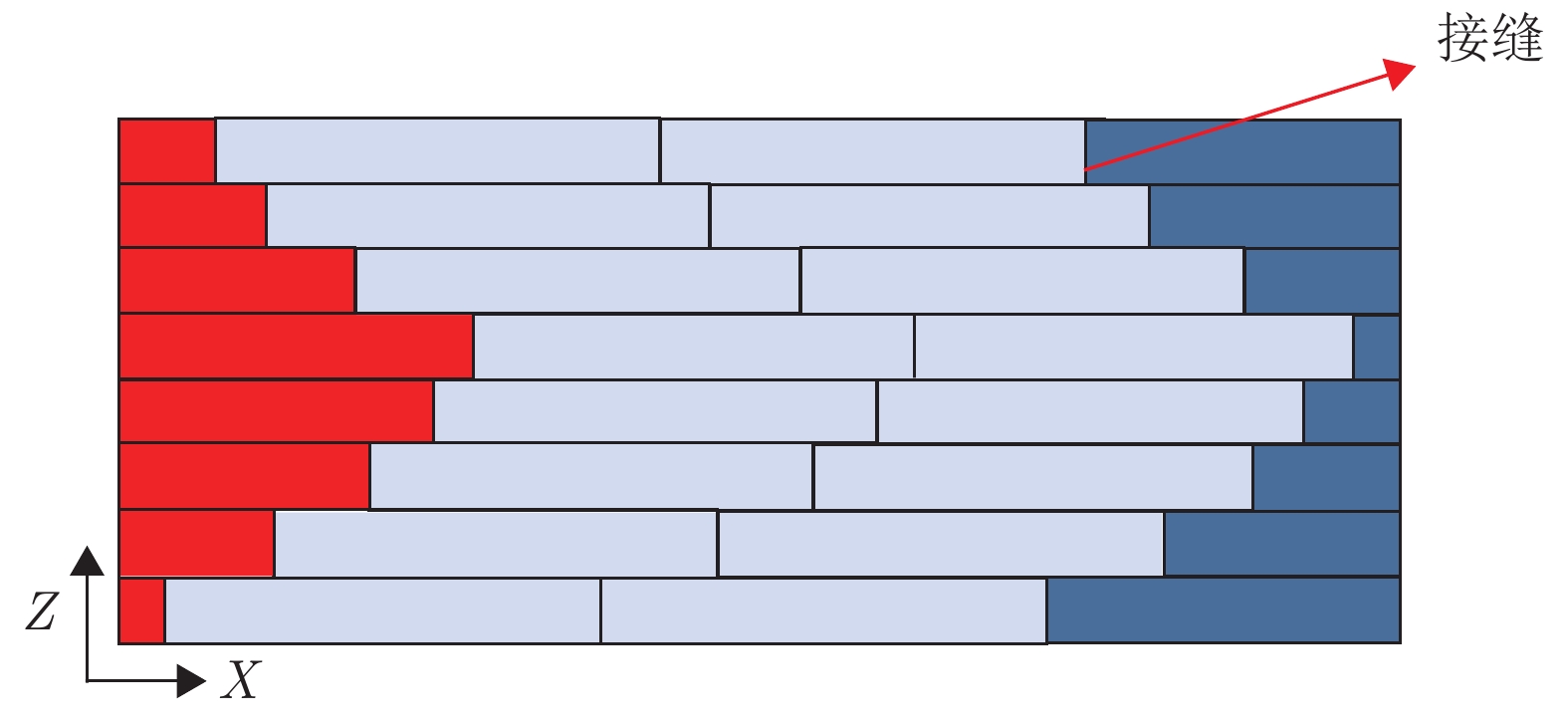
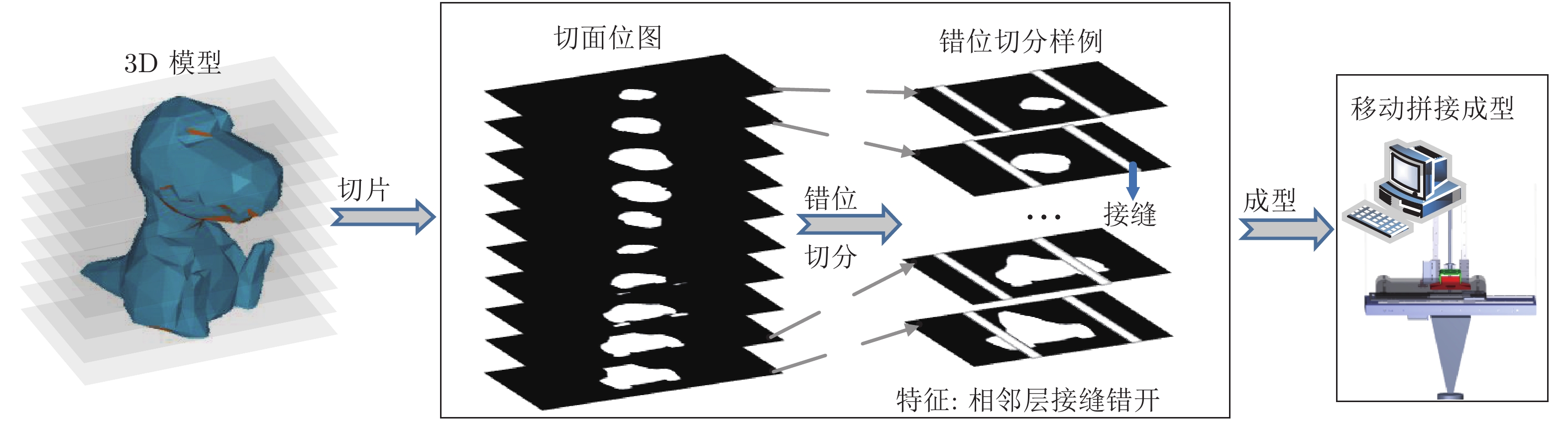
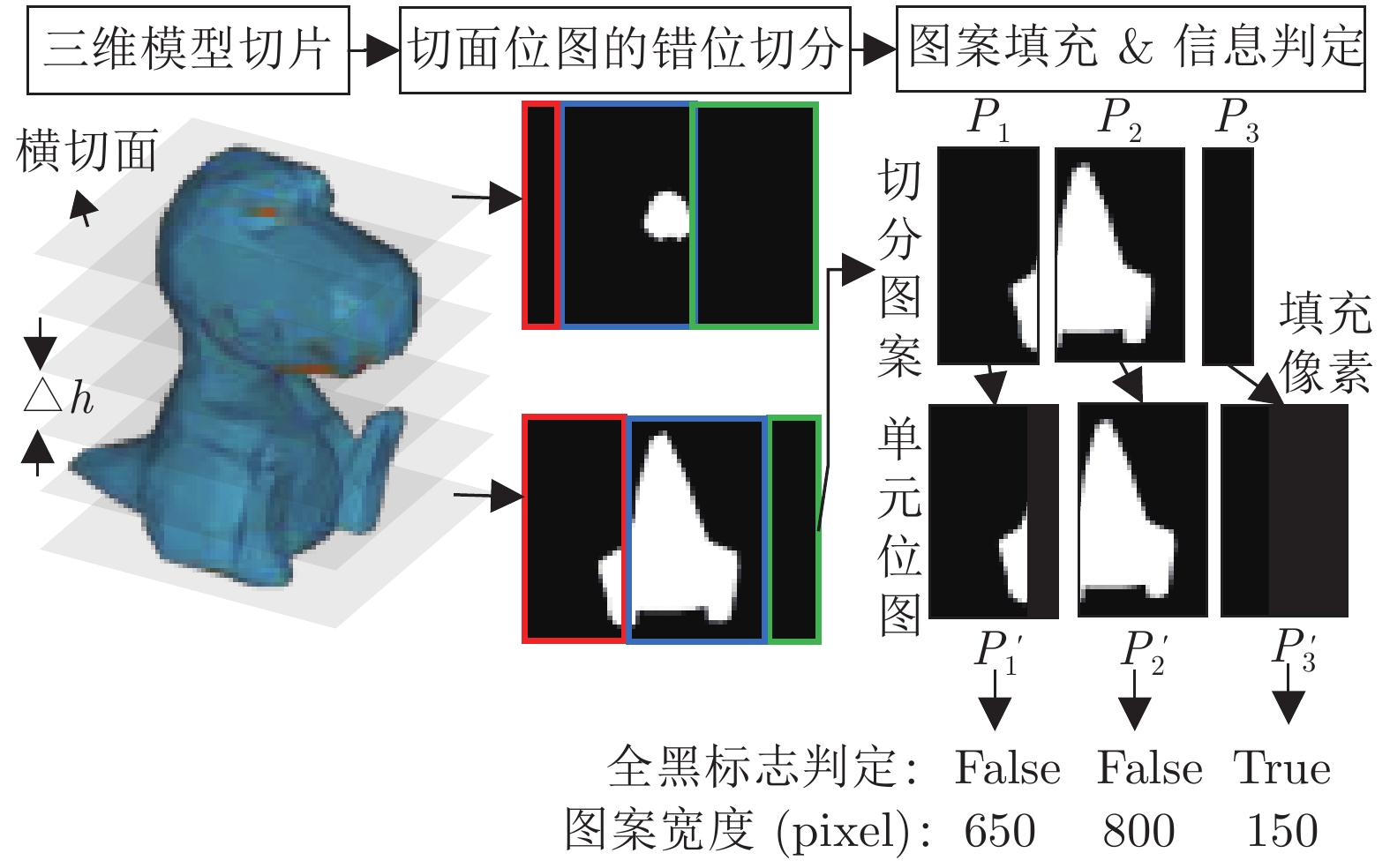
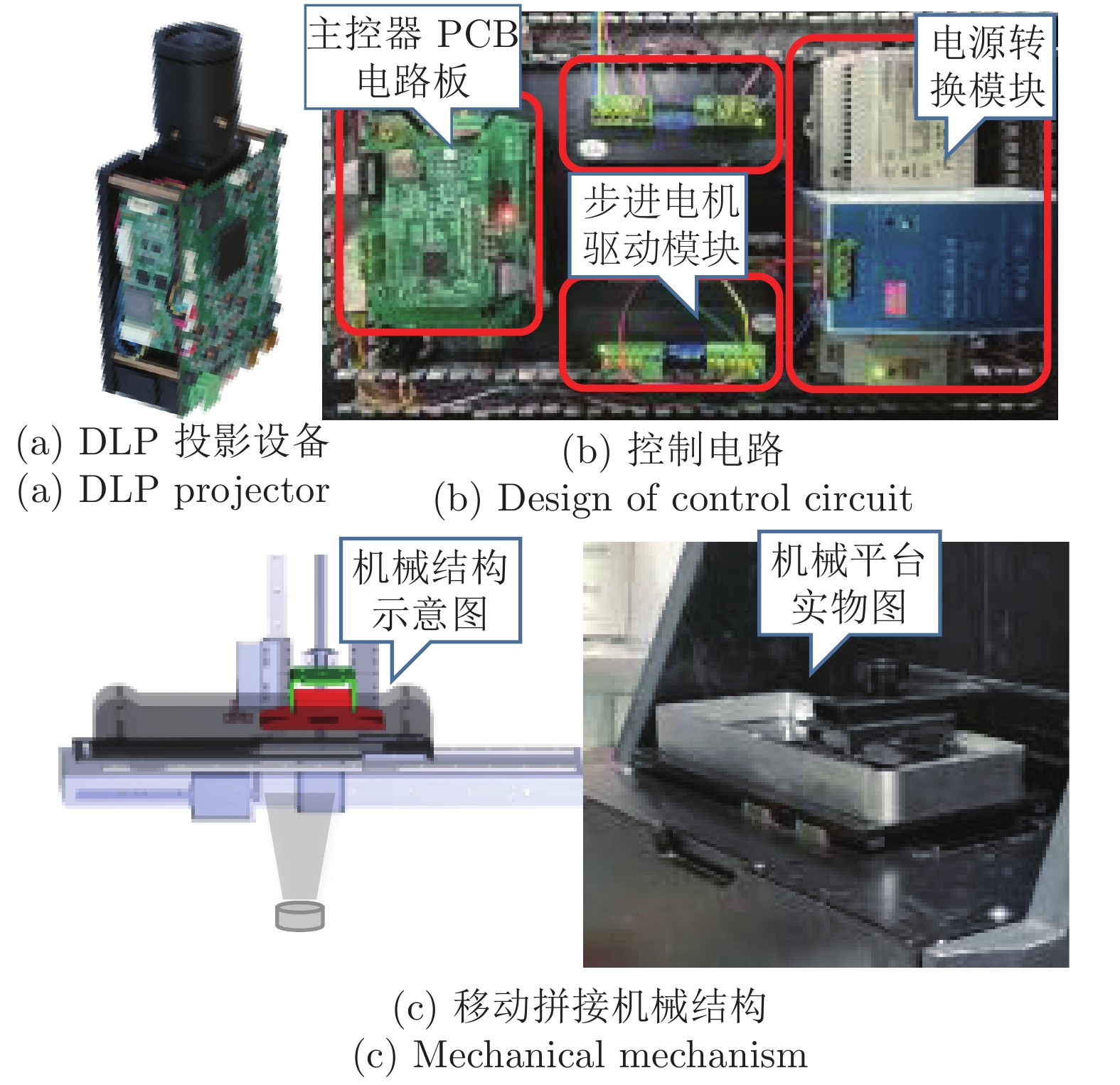
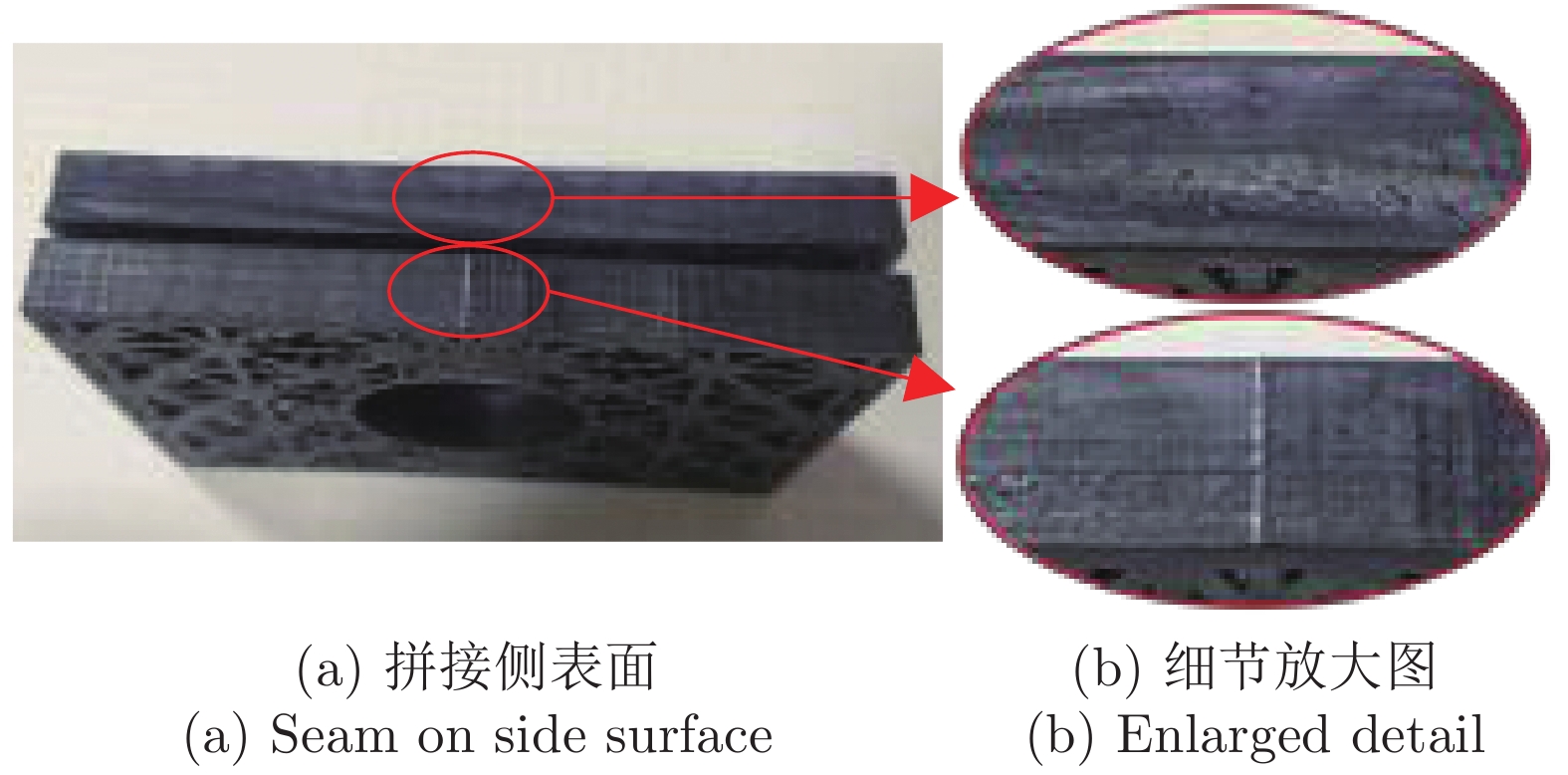
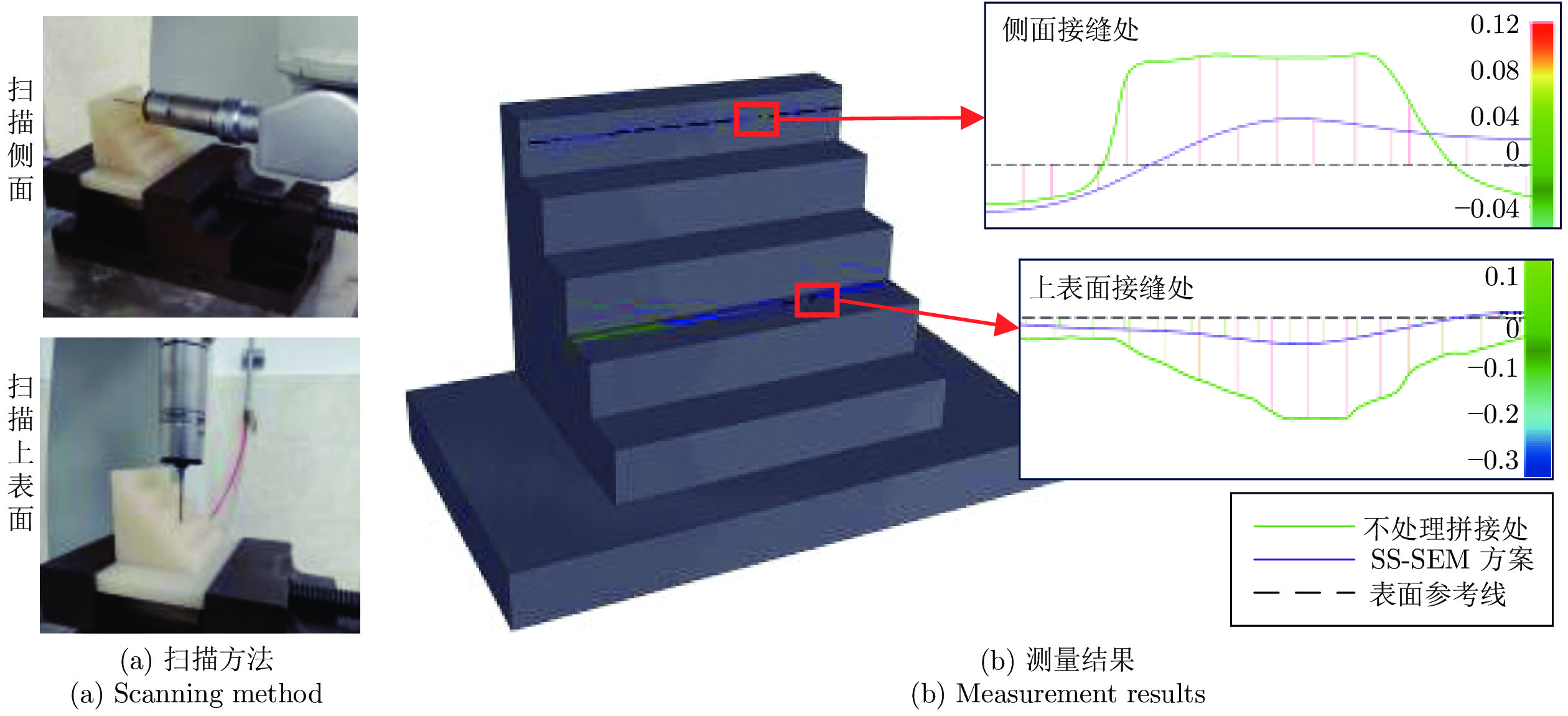
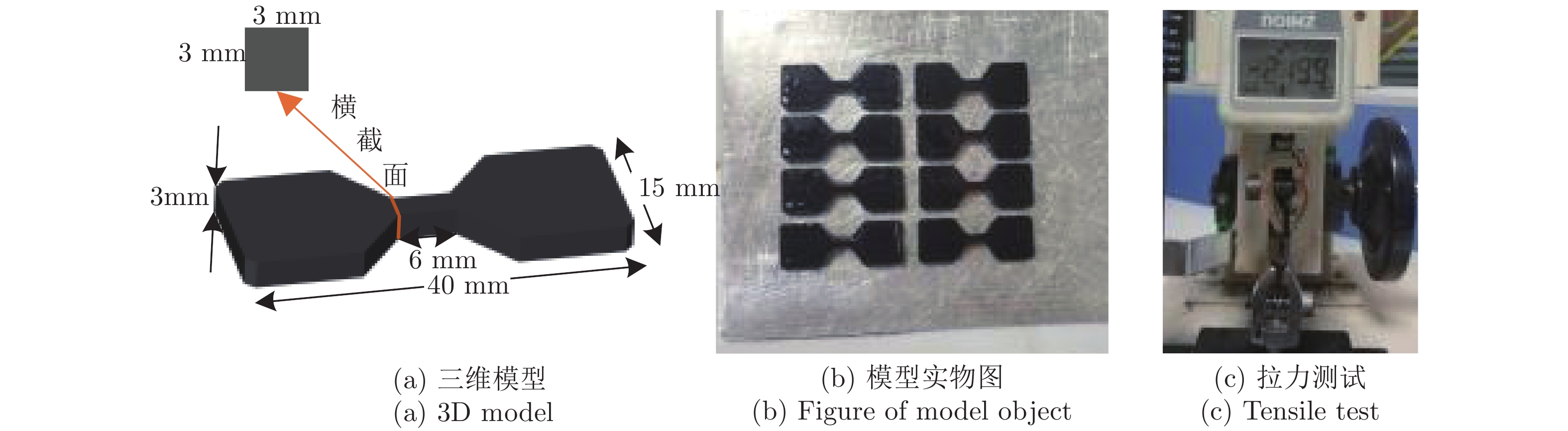
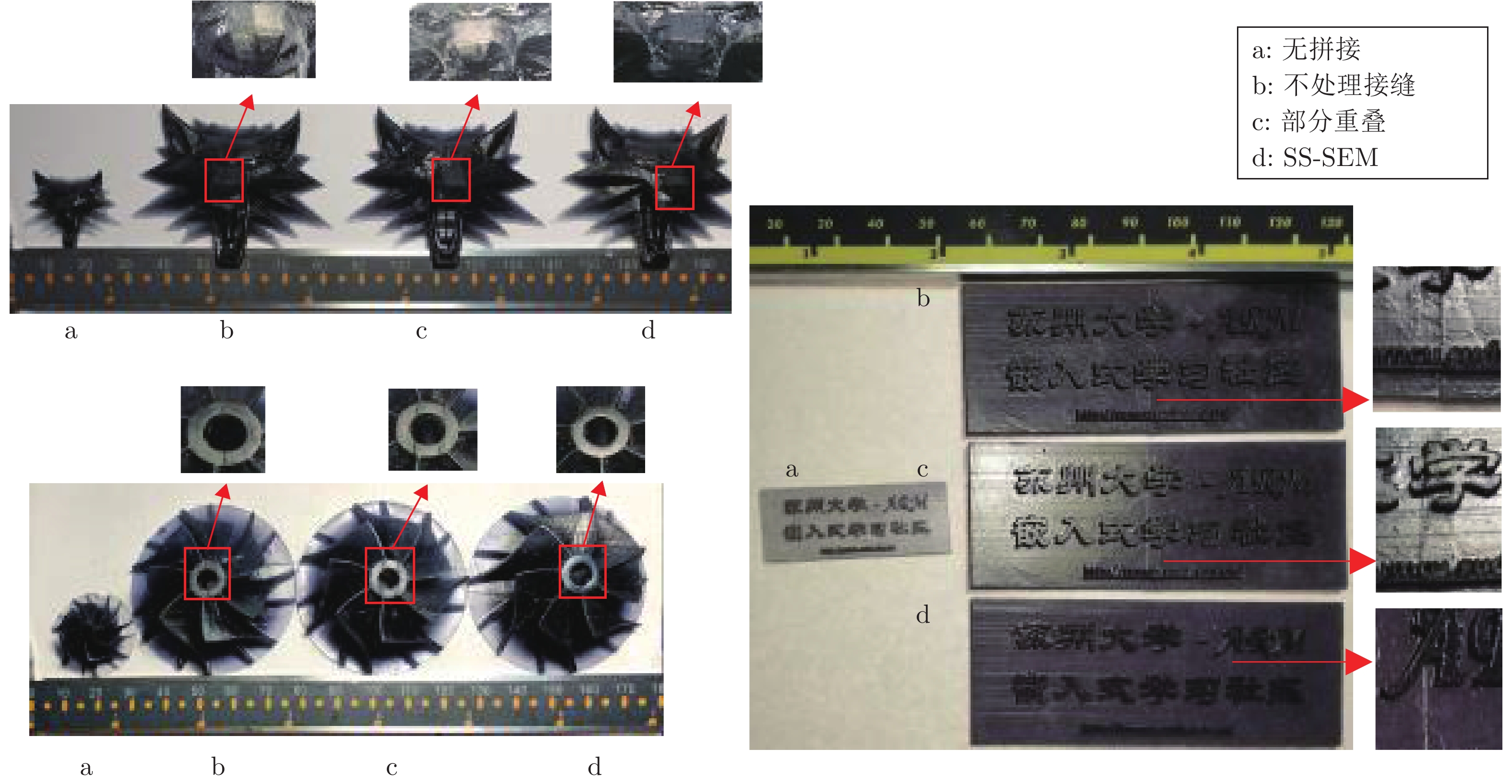
针对面曝光模式的数字光处理(Digital light processing, DLP)型3D打印机成型幅面较小问题, 提出一种移动拼接与错位均摊消除接缝痕迹相结合的大幅面技术方案. 该方案首先对三维模型进行均匀切片形成N层切面, 再对切面位图进行错位切分, 使得相邻层的拼接位置错开, 每张切面位图形成M张单元位图, 构成3D打印的数据源; 其次根据错位参数沿着X轴移动投影仪到达对应曝光位, 每层成型M张单元位图, 拼接构成一层切面薄片, 切面薄片的拼接位置逐层错开, 叠加生成三维模型实体. 实际打印结果表明, 该方案能够以较小的附加成本扩大成型尺寸, 提高模型整体质量.
针对面曝光模式的数字光处理(Digital light processing, DLP)型3D打印机成型幅面较小问题, 提出一种移动拼接与错位均摊消除接缝痕迹相结合的大幅面技术方案. 该方案首先对三维模型进行均匀切片形成N层切面, 再对切面位图进行错位切分, 使得相邻层的拼接位置错开, 每张切面位图形成M张单元位图, 构成3D打印的数据源; 其次根据错位参数沿着X轴移动投影仪到达对应曝光位, 每层成型M张单元位图, 拼接构成一层切面薄片, 切面薄片的拼接位置逐层错开, 叠加生成三维模型实体. 实际打印结果表明, 该方案能够以较小的附加成本扩大成型尺寸, 提高模型整体质量.


2022, 48(7): 1805-1815.
doi: 10.16383/j.aas.c200778
摘要:
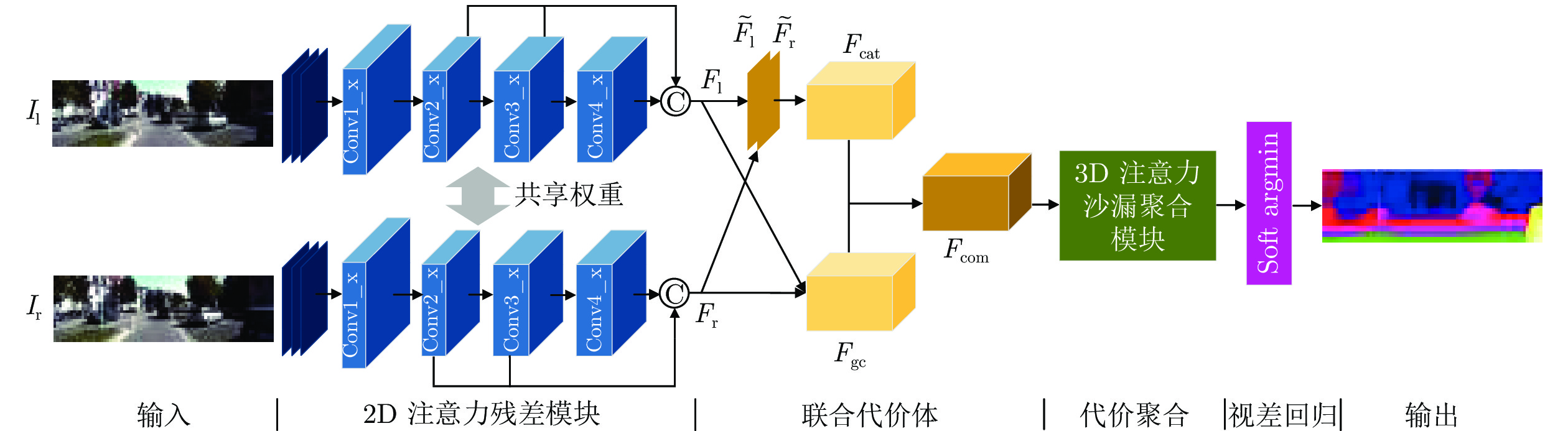
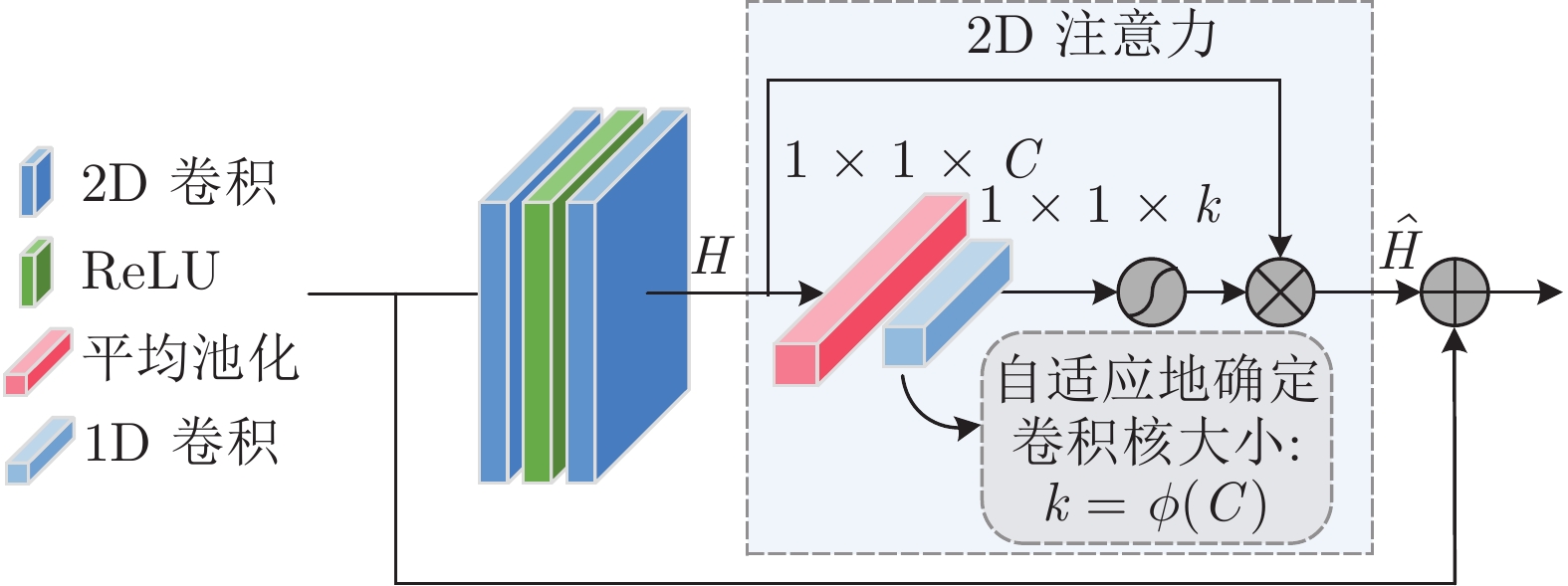
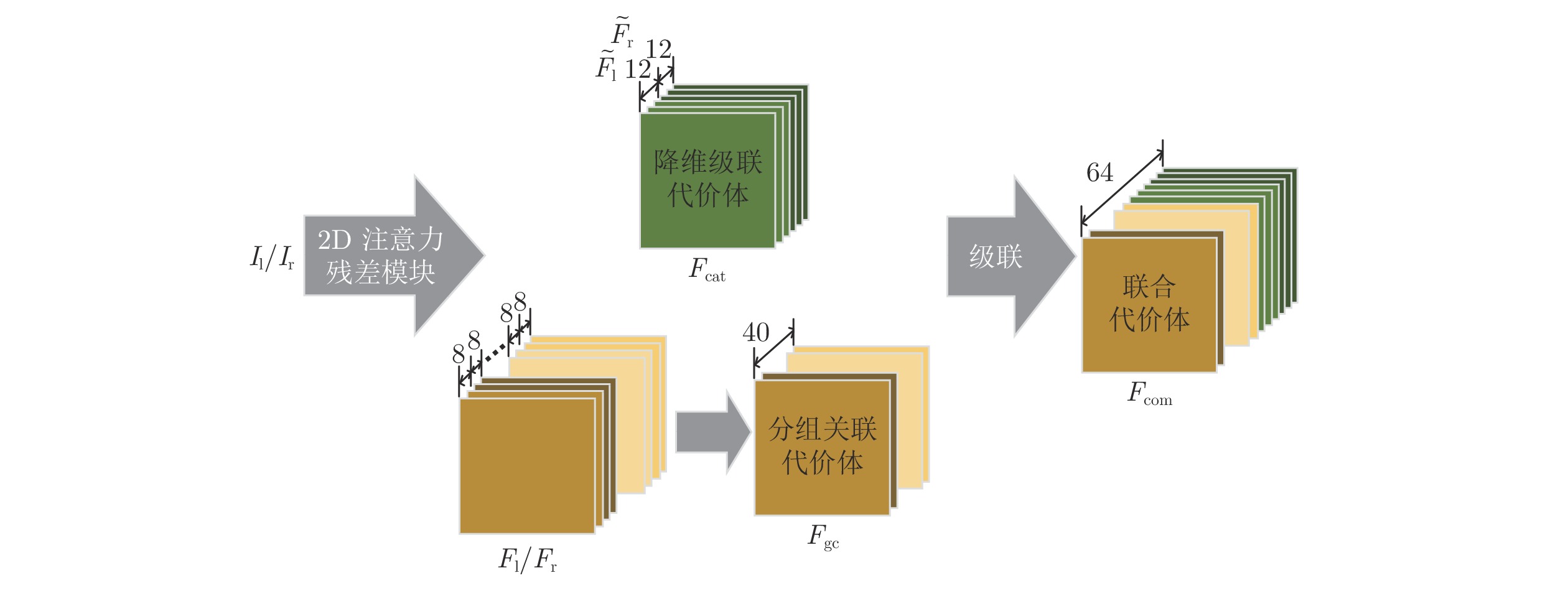
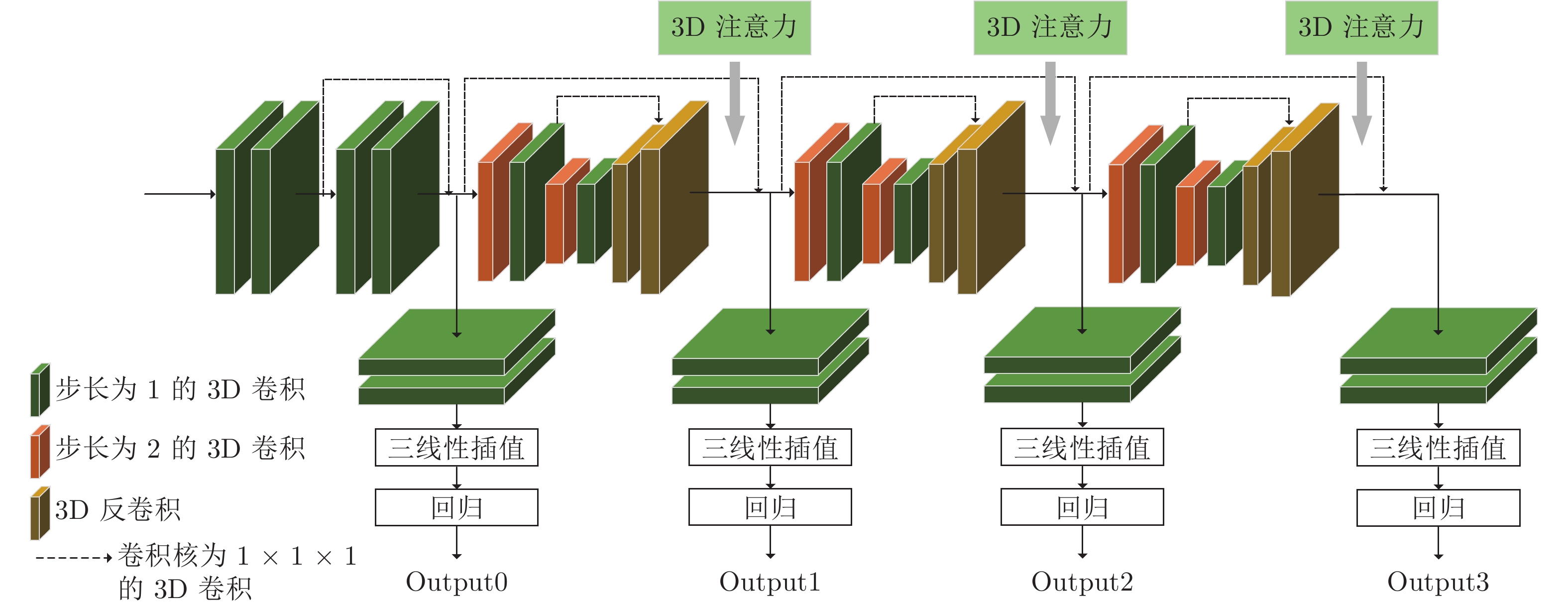
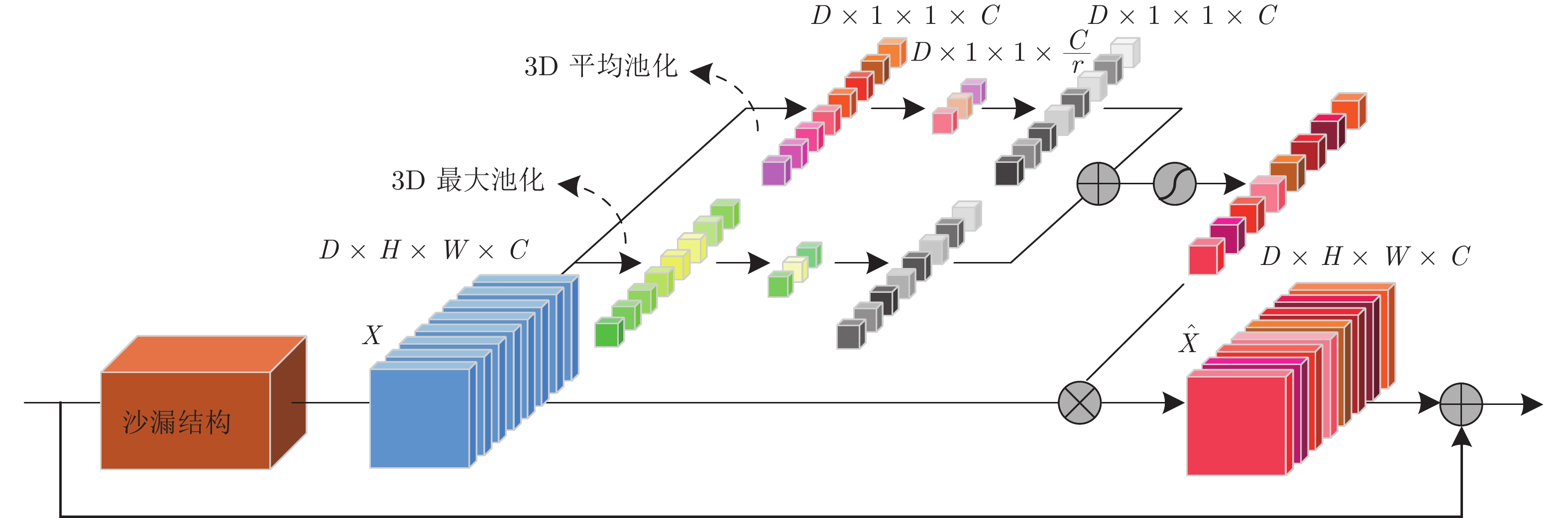
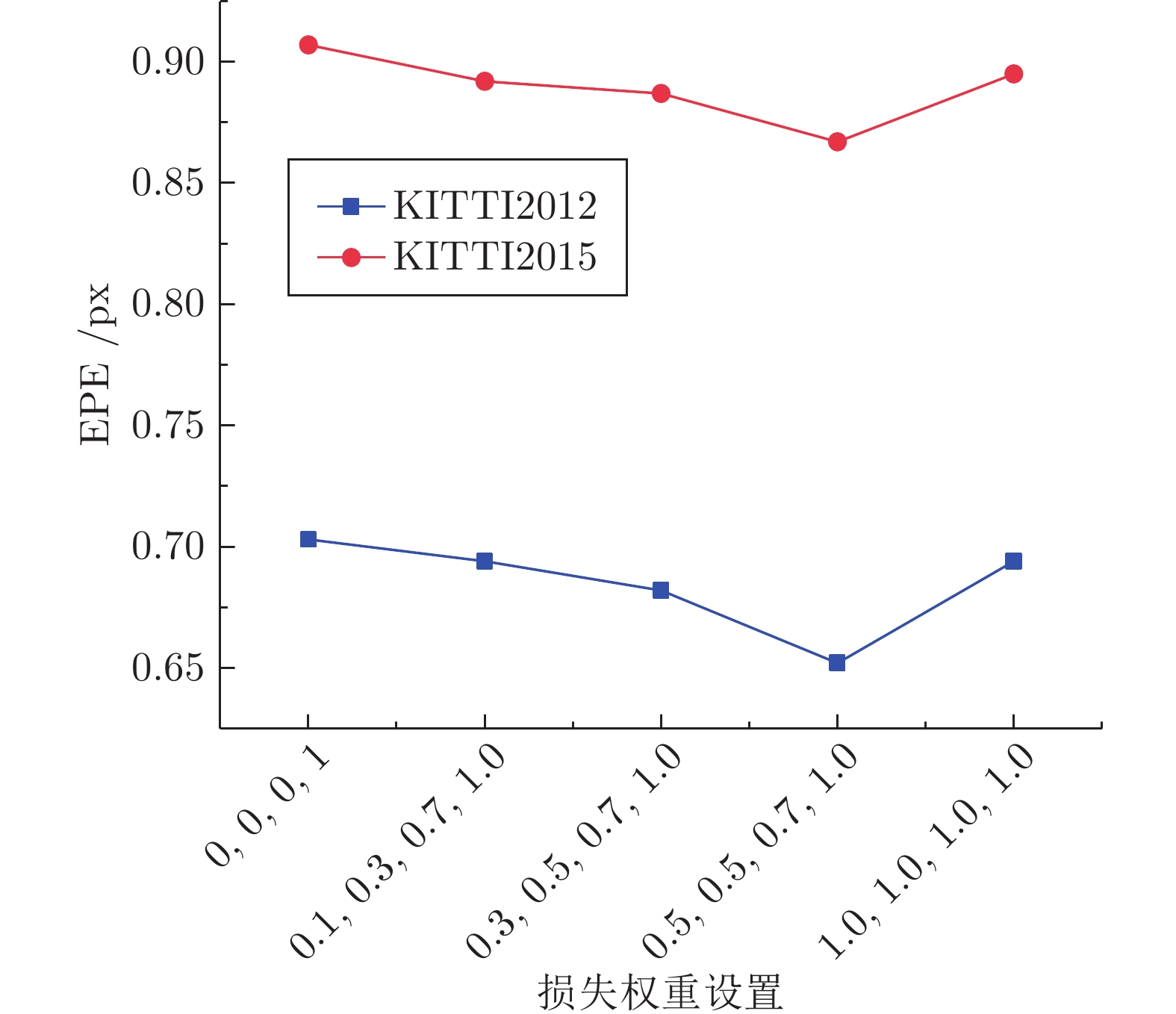
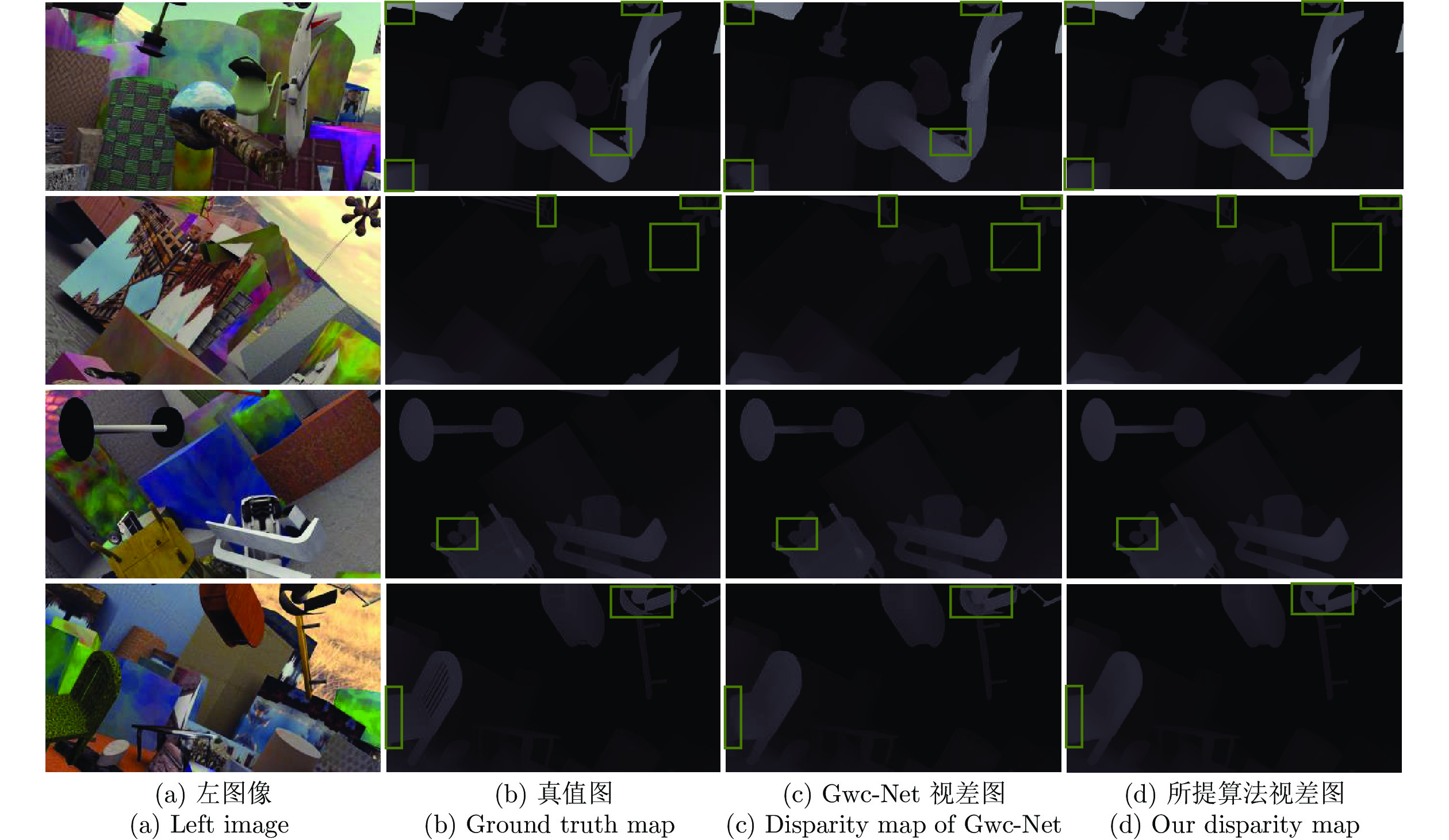
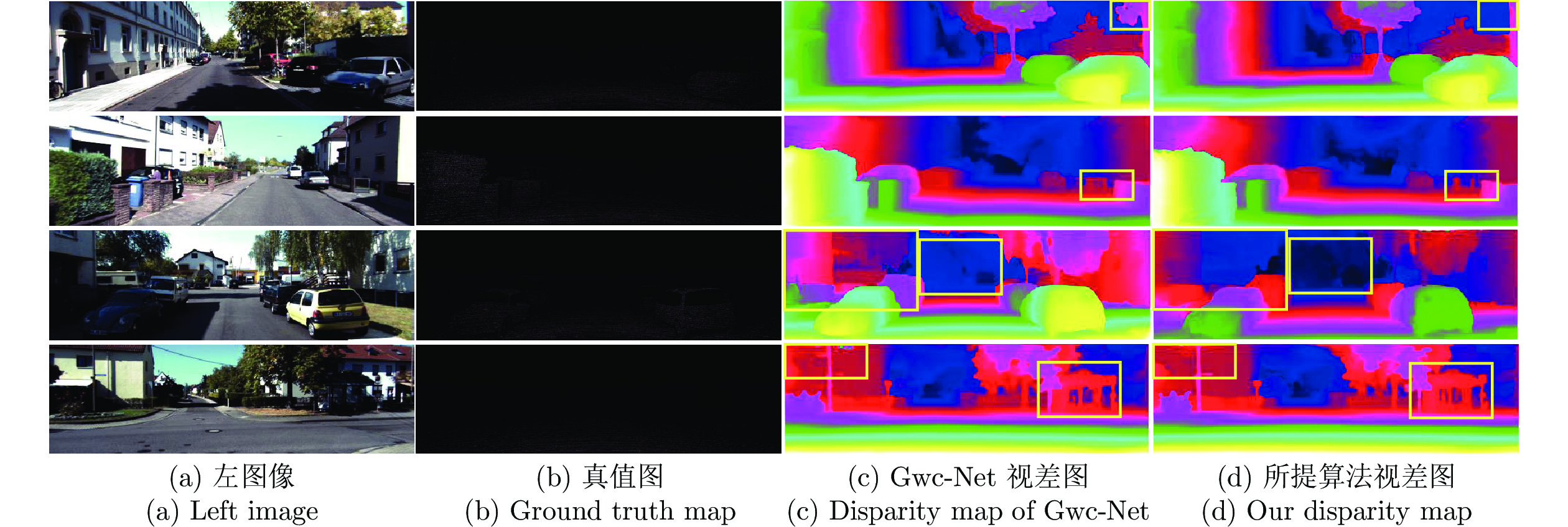
现有基于深度学习的立体匹配算法在学习推理过程中缺乏有效信息交互, 而特征提取和代价聚合两个子模块的特征维度存在差异, 导致注意力方法在立体匹配网络中应用较少、方式单一. 针对上述问题, 本文提出了一种多维注意力特征聚合立体匹配算法. 设计2D注意力残差模块, 通过在原始残差网络中引入无降维自适应2D注意力残差单元, 局部跨通道交互并提取显著信息, 为匹配代价计算提供丰富有效的特征. 构建3D注意力沙漏聚合模块, 以堆叠沙漏结构为骨干设计3D注意力沙漏单元, 捕获多尺度几何上下文信息, 进一步扩展多维注意力机制, 自适应聚合和重新校准来自不同网络深度的代价体. 在三大标准数据集上进行评估, 并与相关算法对比, 实验结果表明所提算法具有更高的预测视差精度, 且在无遮挡的显著对象上效果更佳.
现有基于深度学习的立体匹配算法在学习推理过程中缺乏有效信息交互, 而特征提取和代价聚合两个子模块的特征维度存在差异, 导致注意力方法在立体匹配网络中应用较少、方式单一. 针对上述问题, 本文提出了一种多维注意力特征聚合立体匹配算法. 设计2D注意力残差模块, 通过在原始残差网络中引入无降维自适应2D注意力残差单元, 局部跨通道交互并提取显著信息, 为匹配代价计算提供丰富有效的特征. 构建3D注意力沙漏聚合模块, 以堆叠沙漏结构为骨干设计3D注意力沙漏单元, 捕获多尺度几何上下文信息, 进一步扩展多维注意力机制, 自适应聚合和重新校准来自不同网络深度的代价体. 在三大标准数据集上进行评估, 并与相关算法对比, 实验结果表明所提算法具有更高的预测视差精度, 且在无遮挡的显著对象上效果更佳.

2022, 48(7): 1816-1823.
doi: 10.16383/j.aas.c190406
摘要:
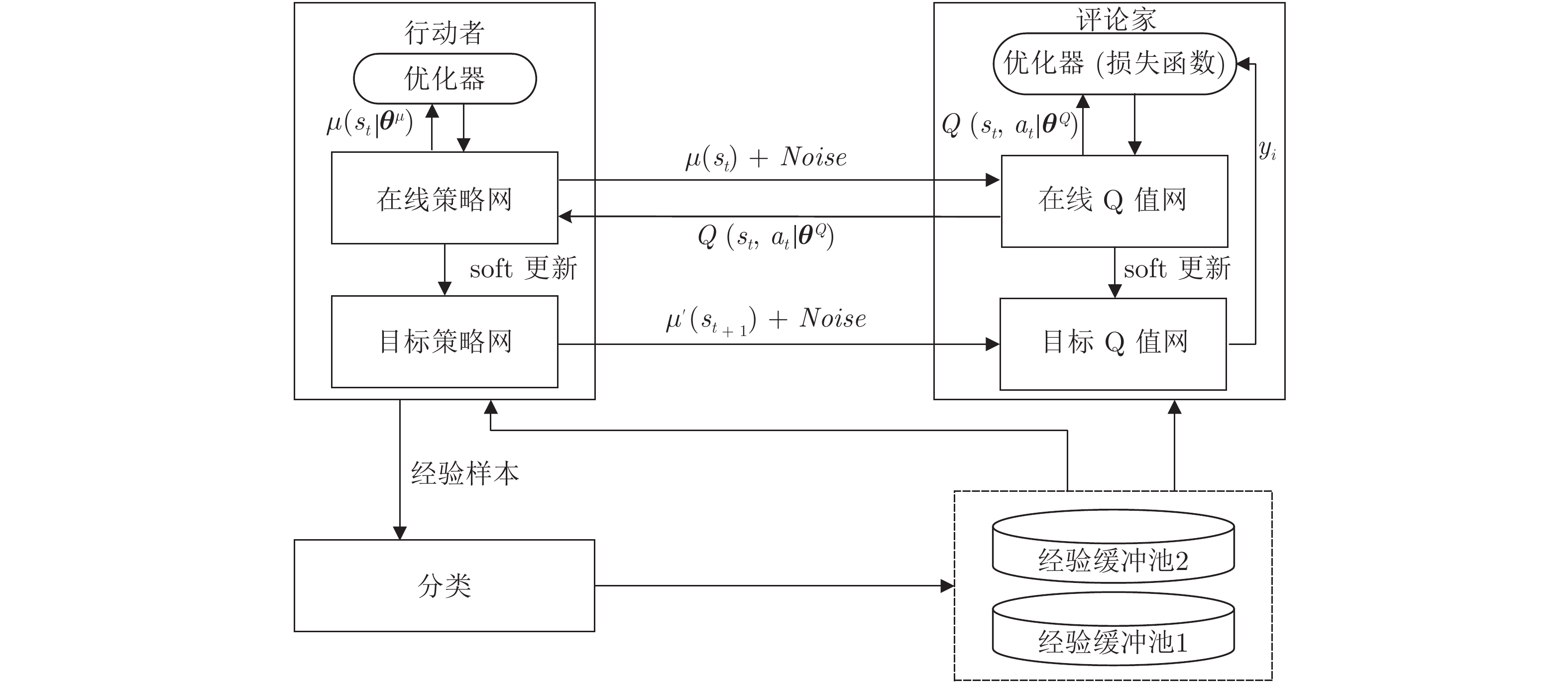
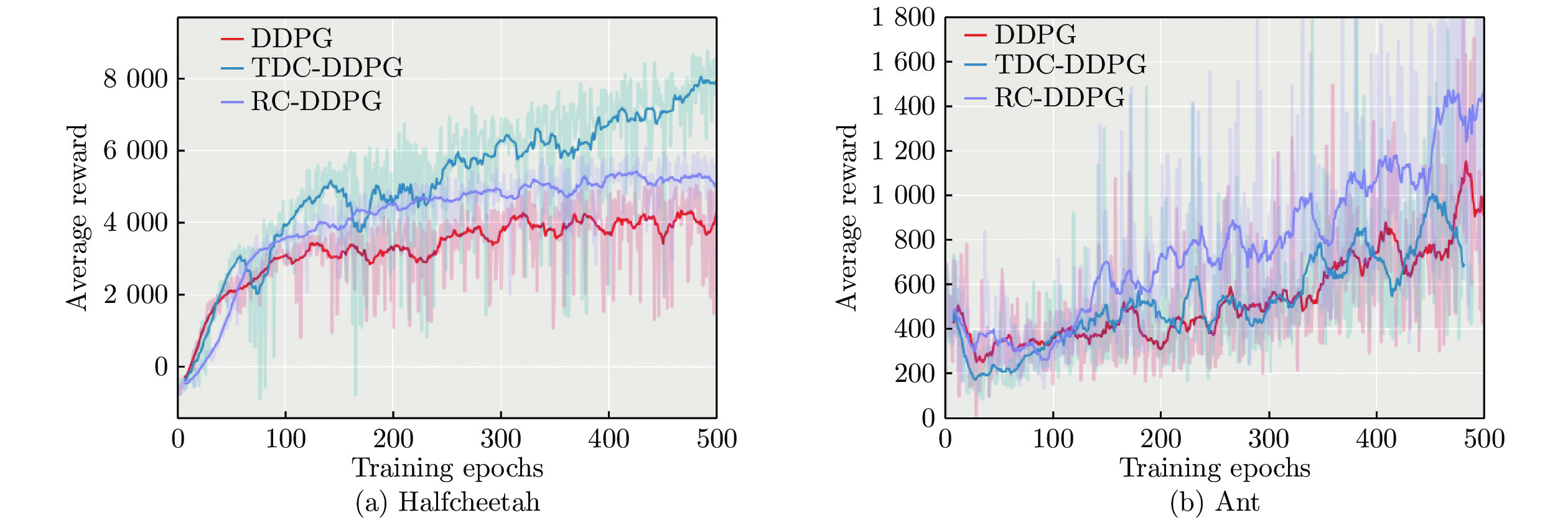
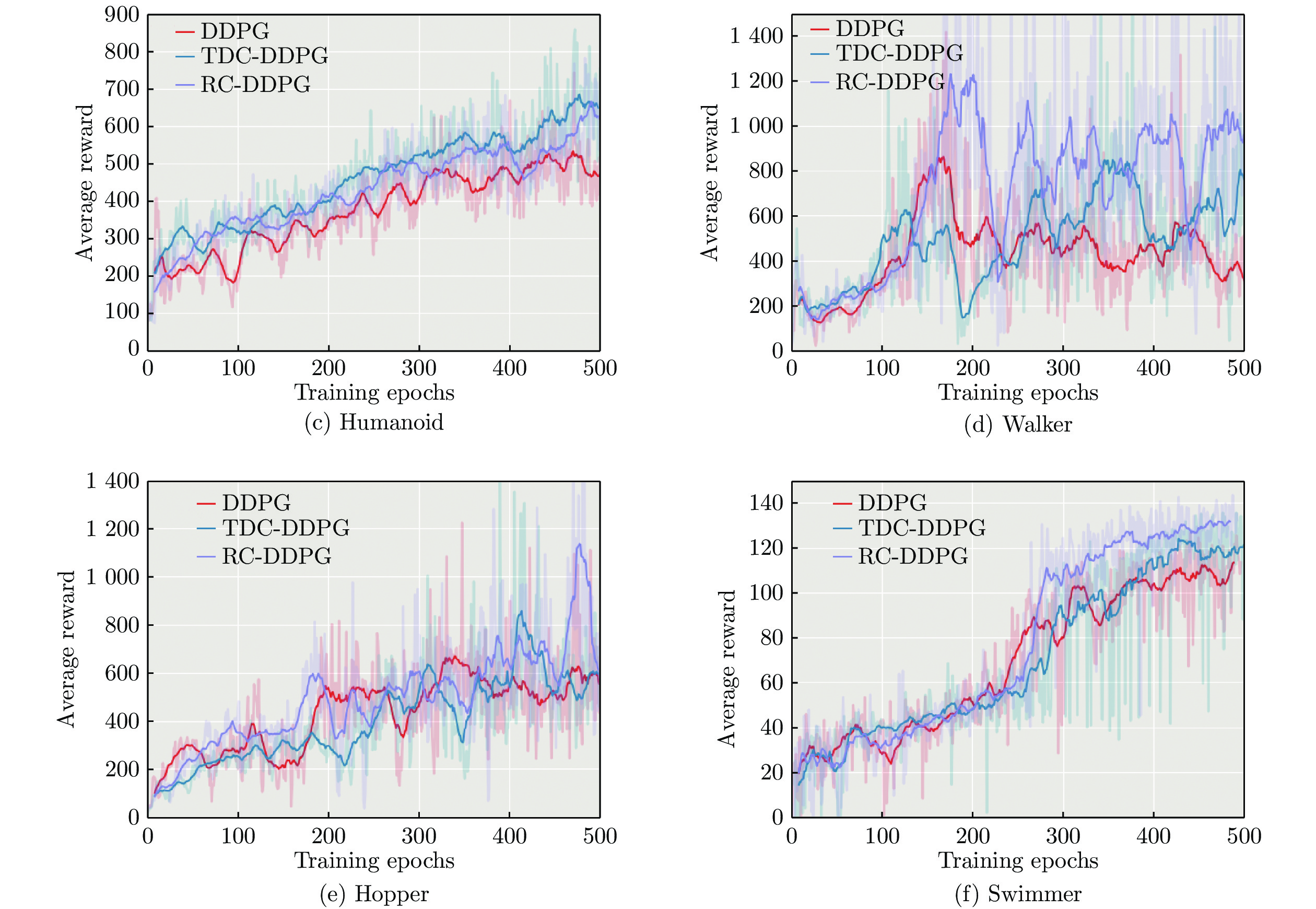
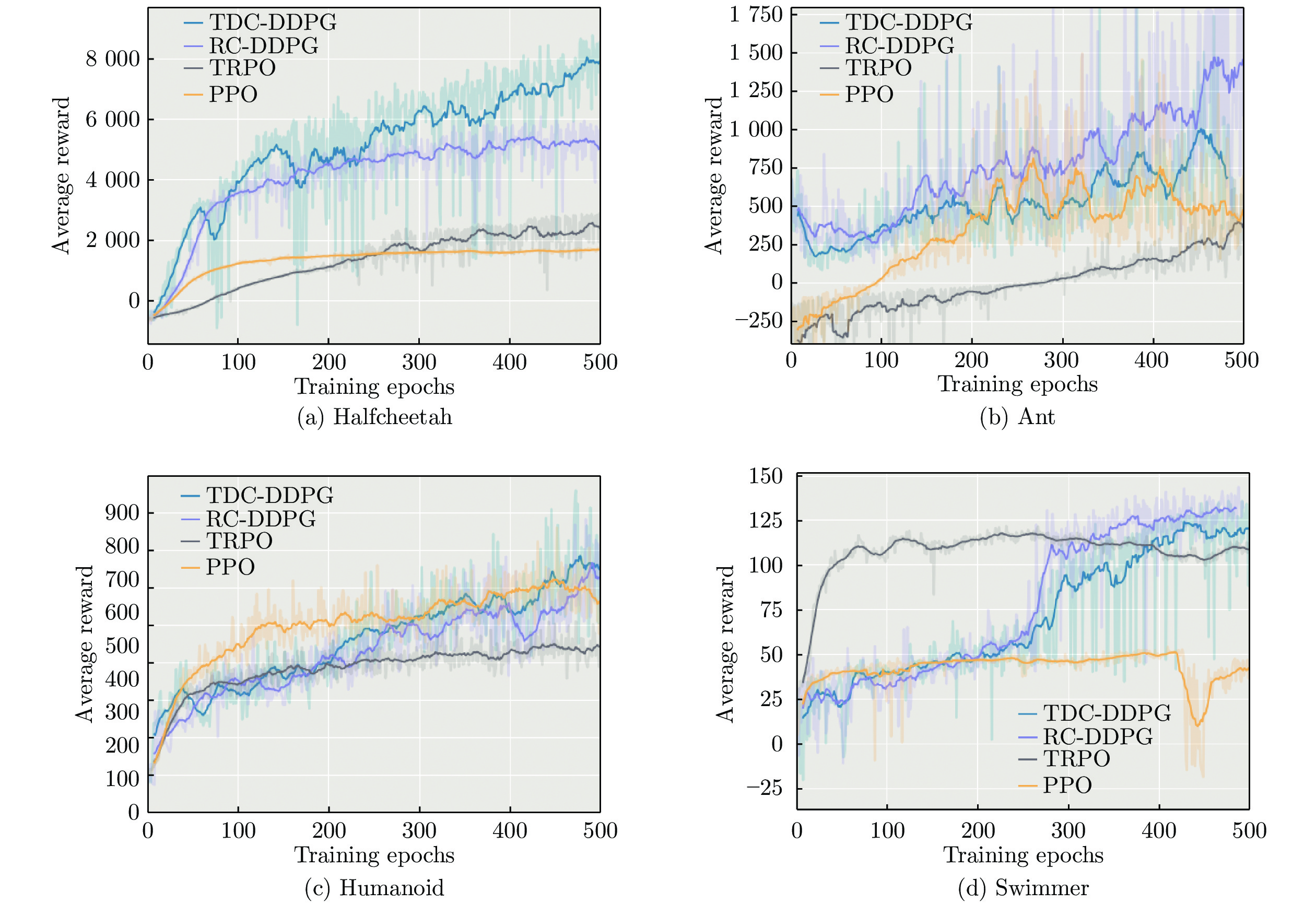
深度确定性策略梯度(Deep deterministic policy gradient, DDPG)方法在连续控制任务中取得了良好的性能表现. 为进一步提高深度确定性策略梯度方法中经验回放机制的效率, 提出分类经验回放方法, 并采用两种方式对经验样本分类: 基于时序差分误差样本分类的深度确定性策略梯度方法(DDPG with temporal difference-error classification, TDC-DDPG)和基于立即奖赏样本分类的深度确定性策略梯度方法(DDPG with reward classification, RC-DDPG).在TDC-DDPG和RC-DDPG方法中, 分别使用两个经验缓冲池, 对产生的经验样本按照重要性程度分类存储, 网络模型训练时通过选取较多重要性程度高的样本加快模型学习. 在连续控制任务中对分类经验回放方法进行测试, 实验结果表明, 与随机选取经验样本的深度确定性策略梯度方法相比, TDC-DDPG和RC-DDPG方法具有更好的性能.
深度确定性策略梯度(Deep deterministic policy gradient, DDPG)方法在连续控制任务中取得了良好的性能表现. 为进一步提高深度确定性策略梯度方法中经验回放机制的效率, 提出分类经验回放方法, 并采用两种方式对经验样本分类: 基于时序差分误差样本分类的深度确定性策略梯度方法(DDPG with temporal difference-error classification, TDC-DDPG)和基于立即奖赏样本分类的深度确定性策略梯度方法(DDPG with reward classification, RC-DDPG).在TDC-DDPG和RC-DDPG方法中, 分别使用两个经验缓冲池, 对产生的经验样本按照重要性程度分类存储, 网络模型训练时通过选取较多重要性程度高的样本加快模型学习. 在连续控制任务中对分类经验回放方法进行测试, 实验结果表明, 与随机选取经验样本的深度确定性策略梯度方法相比, TDC-DDPG和RC-DDPG方法具有更好的性能.
2022, 48(7): 1824-1833.
doi: 10.16383/j.aas.c190733
摘要:
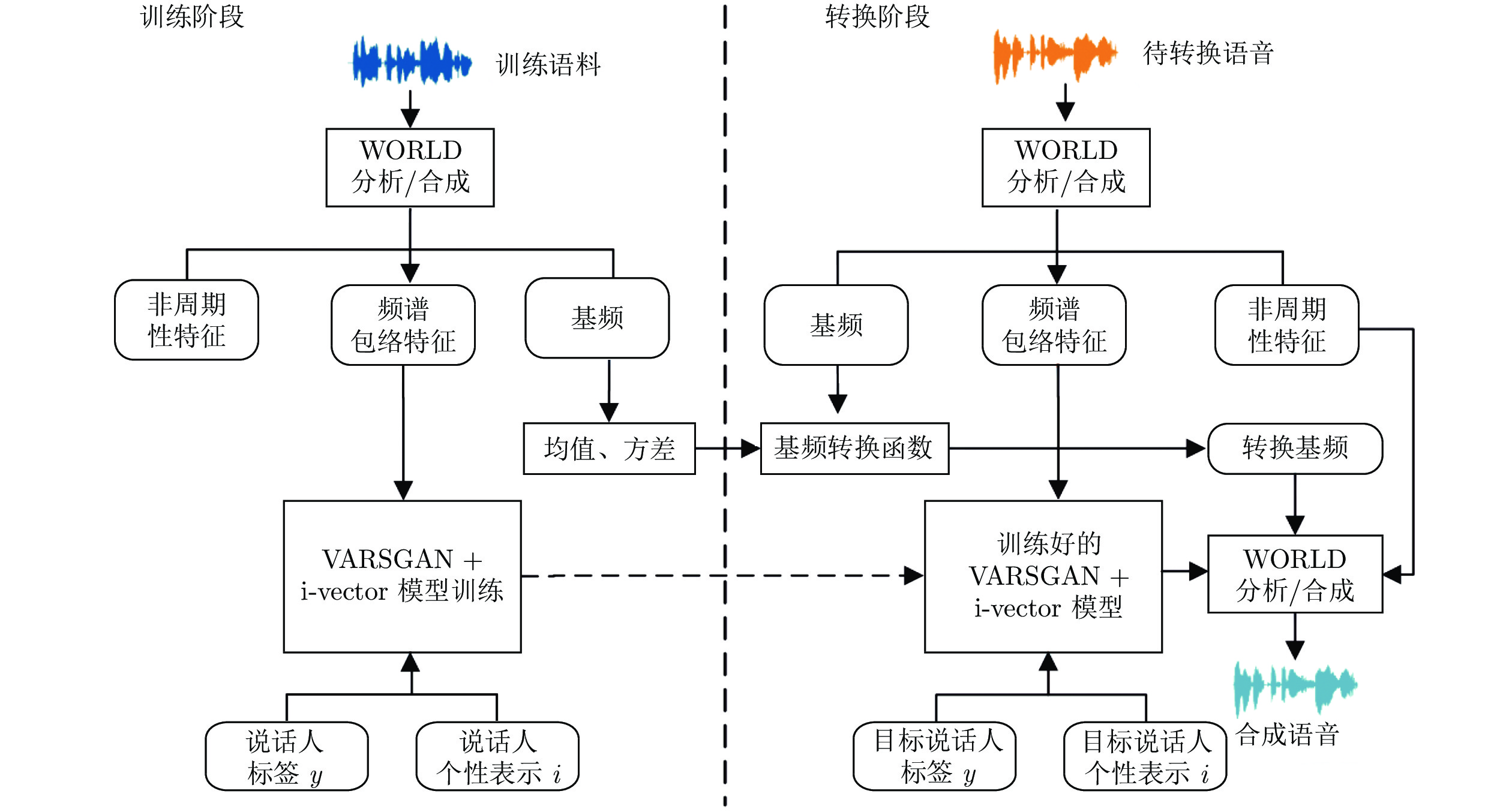
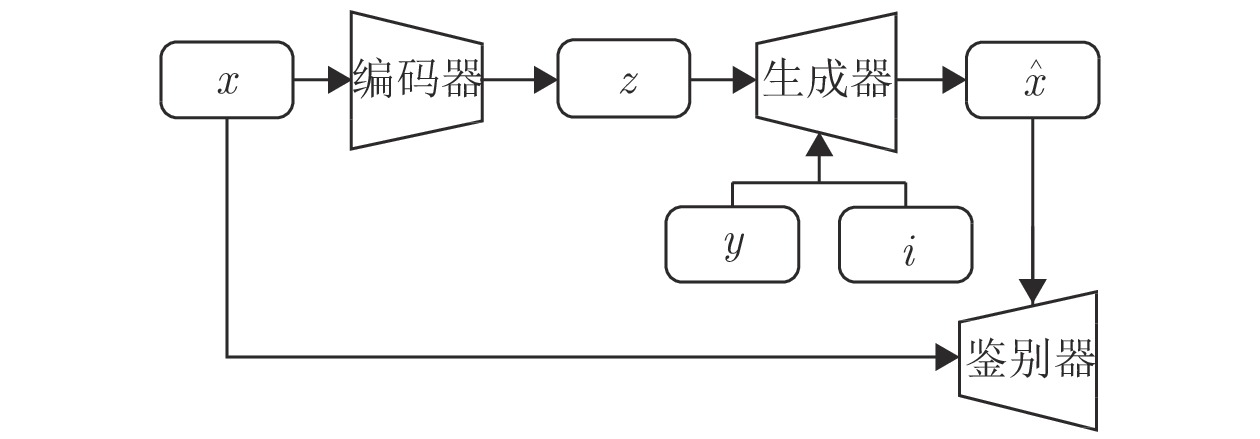
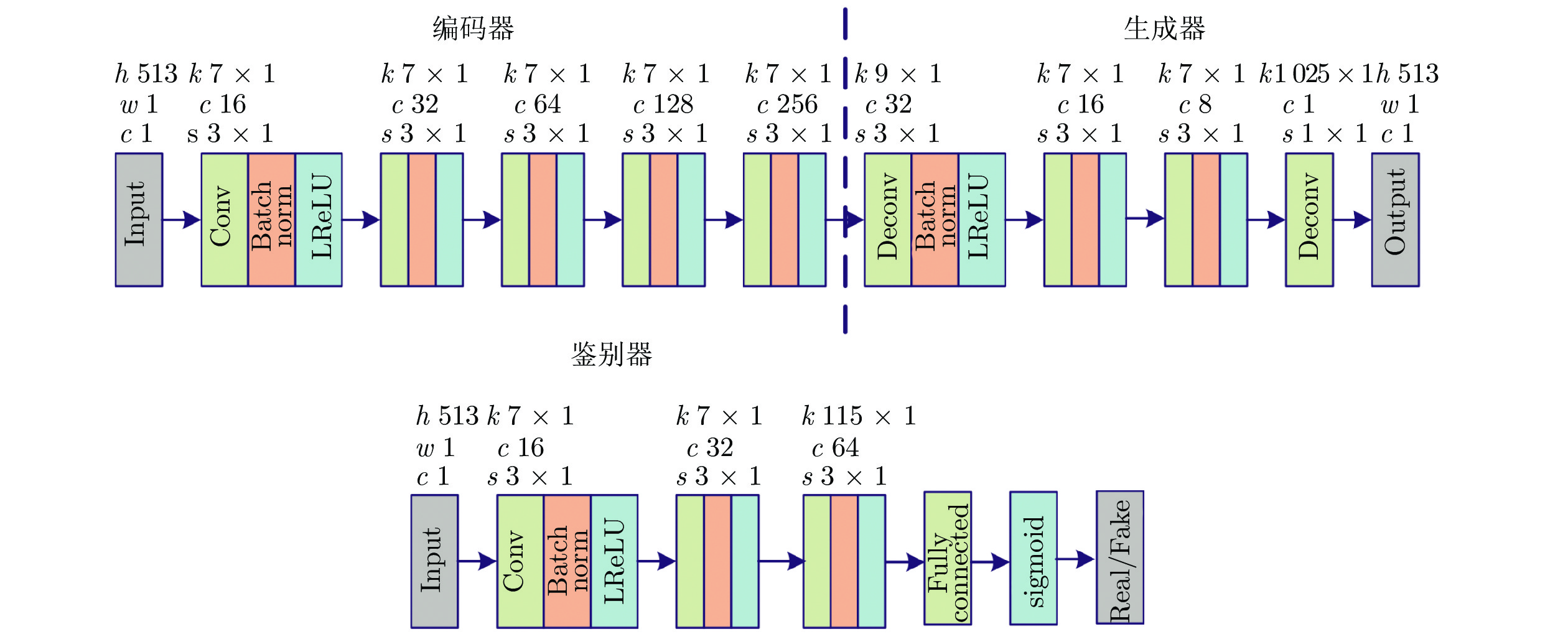
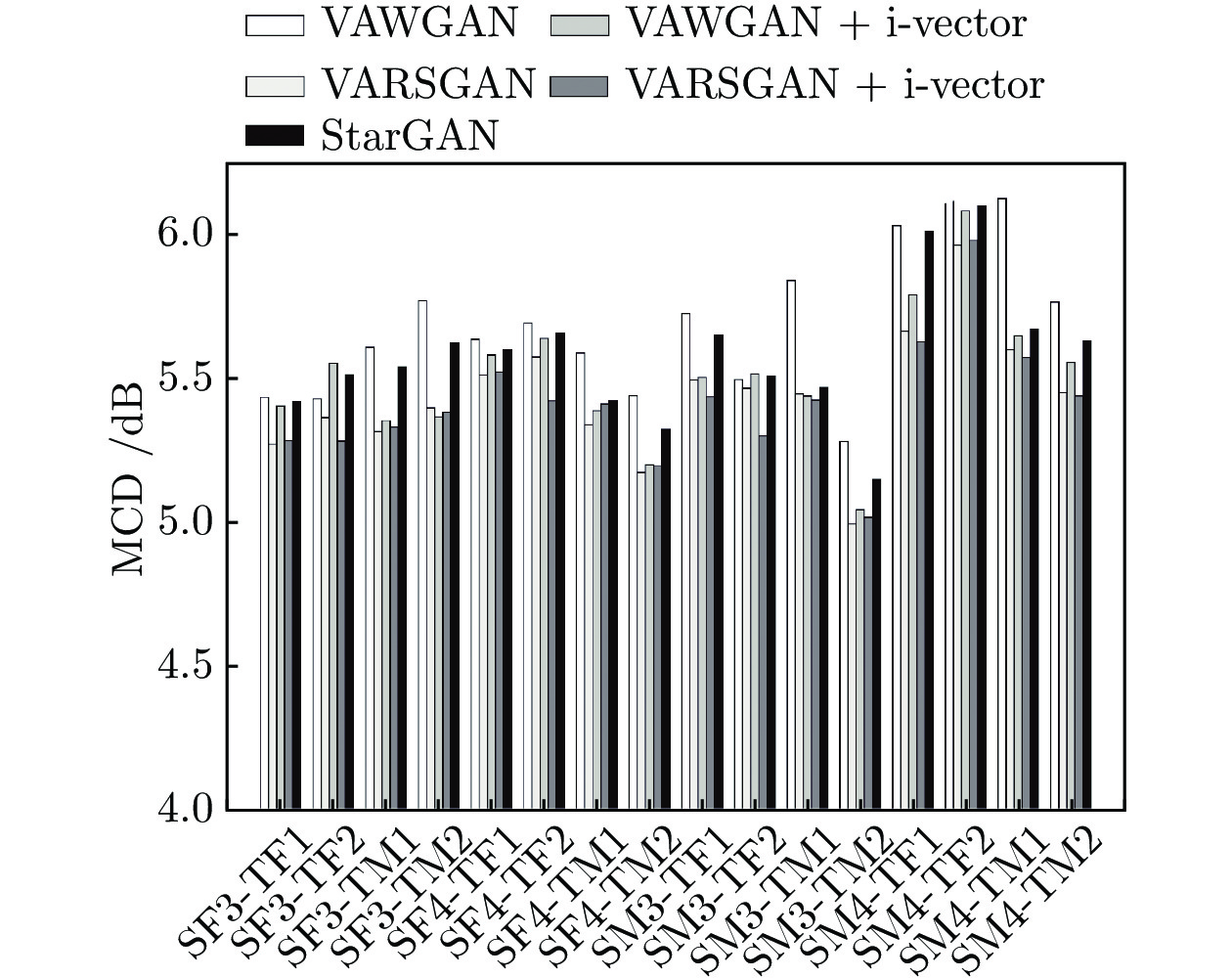
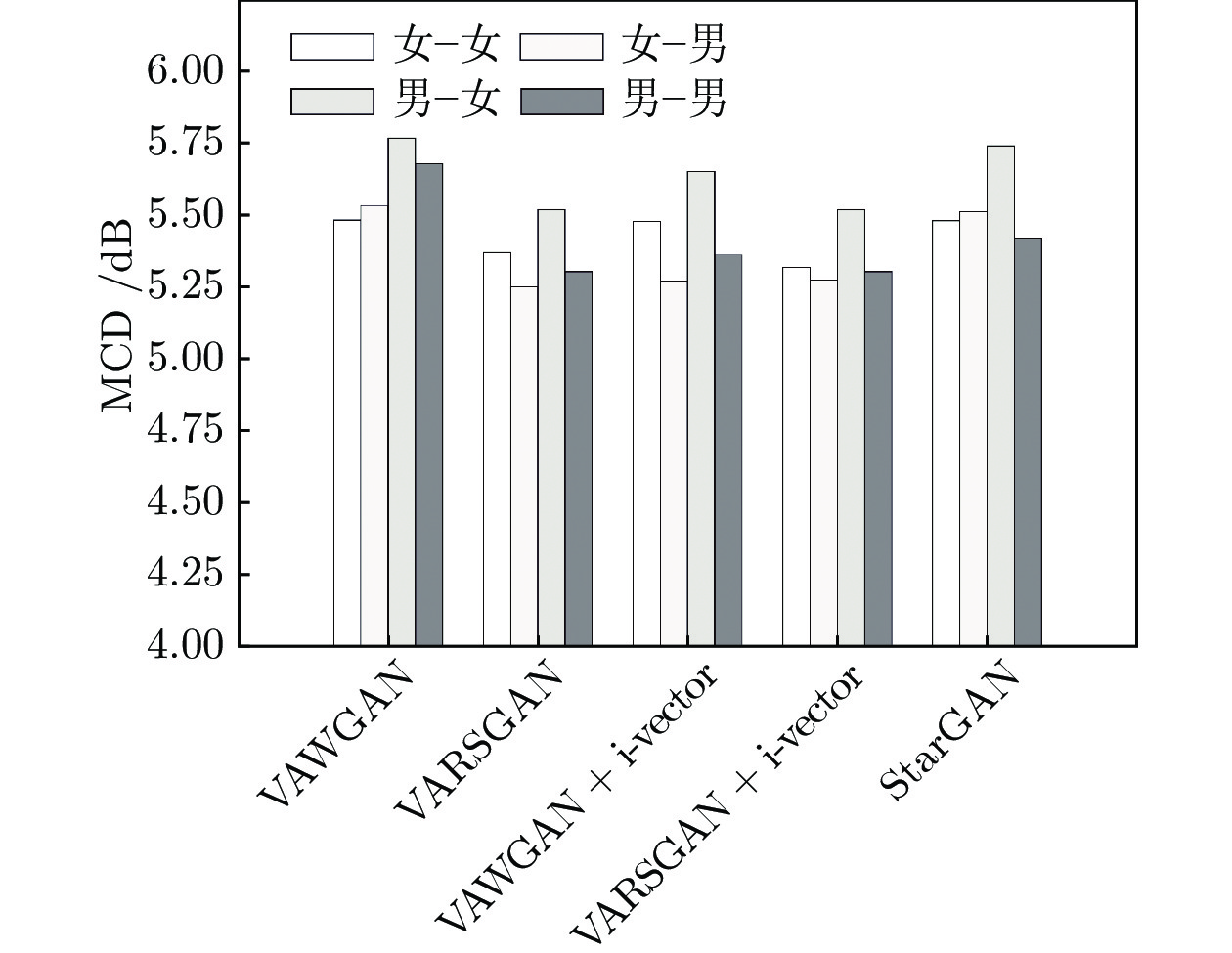
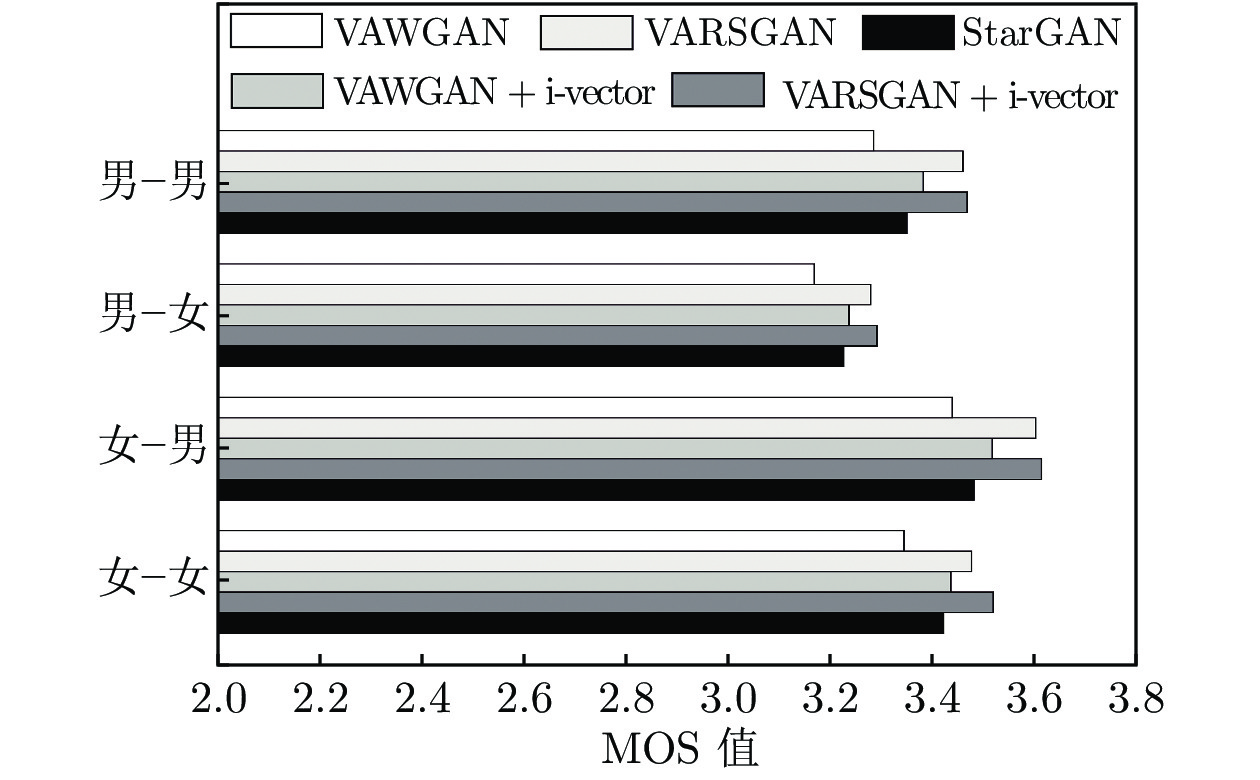
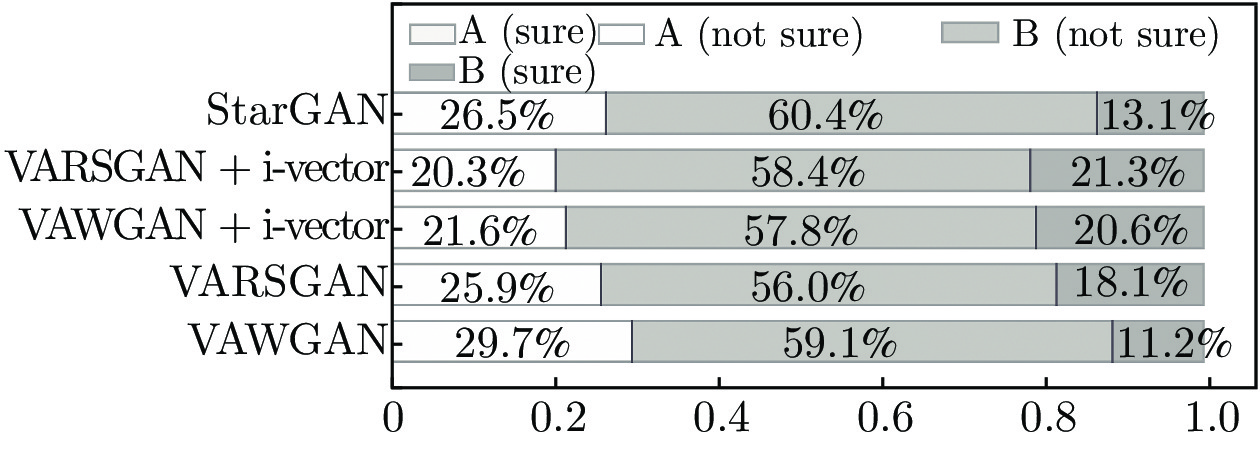
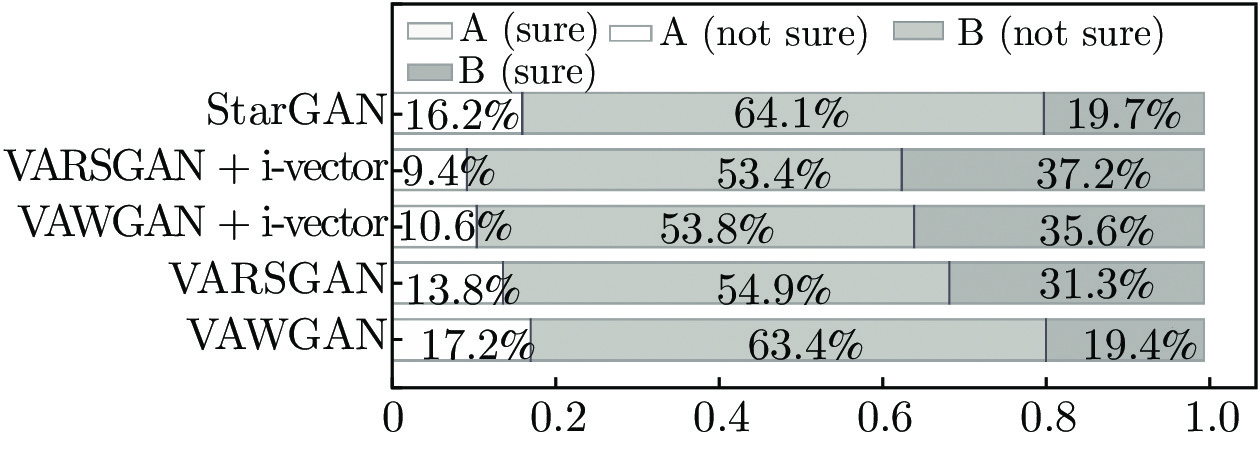
提出一种基于i向量和变分自编码相对生成对抗网络的语音转换方法, 实现了非平行文本条件下高质量的多对多语音转换. 性能良好的语音转换系统, 既要保持重构语音的自然度, 又要兼顾转换语音的说话人个性特征是否准确. 首先为了改善合成语音自然度, 利用生成性能更好的相对生成对抗网络代替基于变分自编码生成对抗网络模型中的Wasserstein生成对抗网络, 通过构造相对鉴别器的方式, 使得鉴别器的输出依赖于真实样本和生成样本间的相对值, 克服了Wasserstein生成对抗网络性能不稳定和收敛速度较慢等问题. 进一步为了提升转换语音的说话人个性相似度, 在解码阶段, 引入含有丰富个性信息的i向量, 以充分学习说话人的个性化特征. 客观和主观实验表明, 转换后的语音平均梅尔倒谱失真距离值较基准模型降低4.80%, 平均意见得分值提升5.12%, ABX 值提升8.60%, 验证了该方法在语音自然度和个性相似度两个方面均有显著的提高, 实现了高质量的语音转换.
提出一种基于i向量和变分自编码相对生成对抗网络的语音转换方法, 实现了非平行文本条件下高质量的多对多语音转换. 性能良好的语音转换系统, 既要保持重构语音的自然度, 又要兼顾转换语音的说话人个性特征是否准确. 首先为了改善合成语音自然度, 利用生成性能更好的相对生成对抗网络代替基于变分自编码生成对抗网络模型中的Wasserstein生成对抗网络, 通过构造相对鉴别器的方式, 使得鉴别器的输出依赖于真实样本和生成样本间的相对值, 克服了Wasserstein生成对抗网络性能不稳定和收敛速度较慢等问题. 进一步为了提升转换语音的说话人个性相似度, 在解码阶段, 引入含有丰富个性信息的i向量, 以充分学习说话人的个性化特征. 客观和主观实验表明, 转换后的语音平均梅尔倒谱失真距离值较基准模型降低4.80%, 平均意见得分值提升5.12%, ABX 值提升8.60%, 验证了该方法在语音自然度和个性相似度两个方面均有显著的提高, 实现了高质量的语音转换.
2022, 48(7): 1834-1846.
doi: 10.16383/j.aas.c190372
摘要:
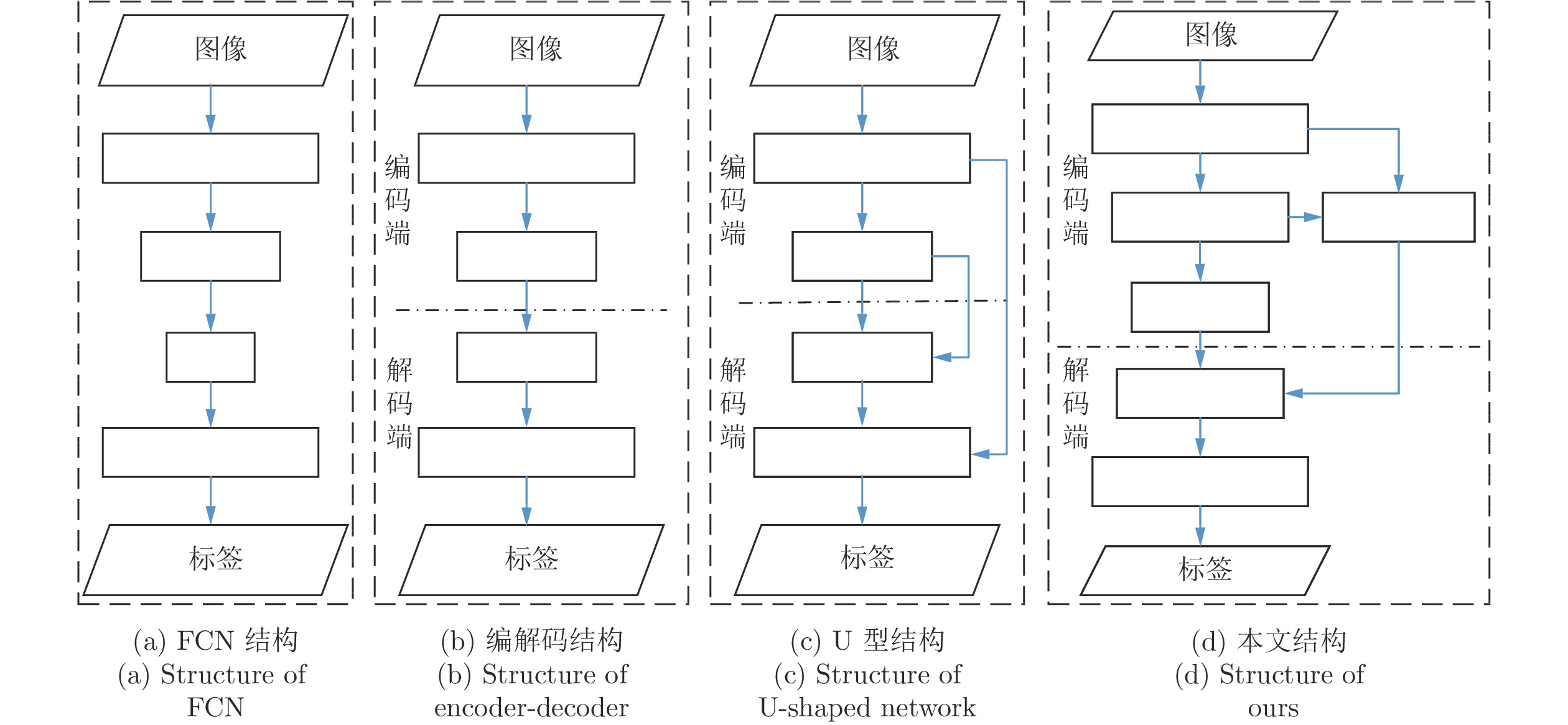
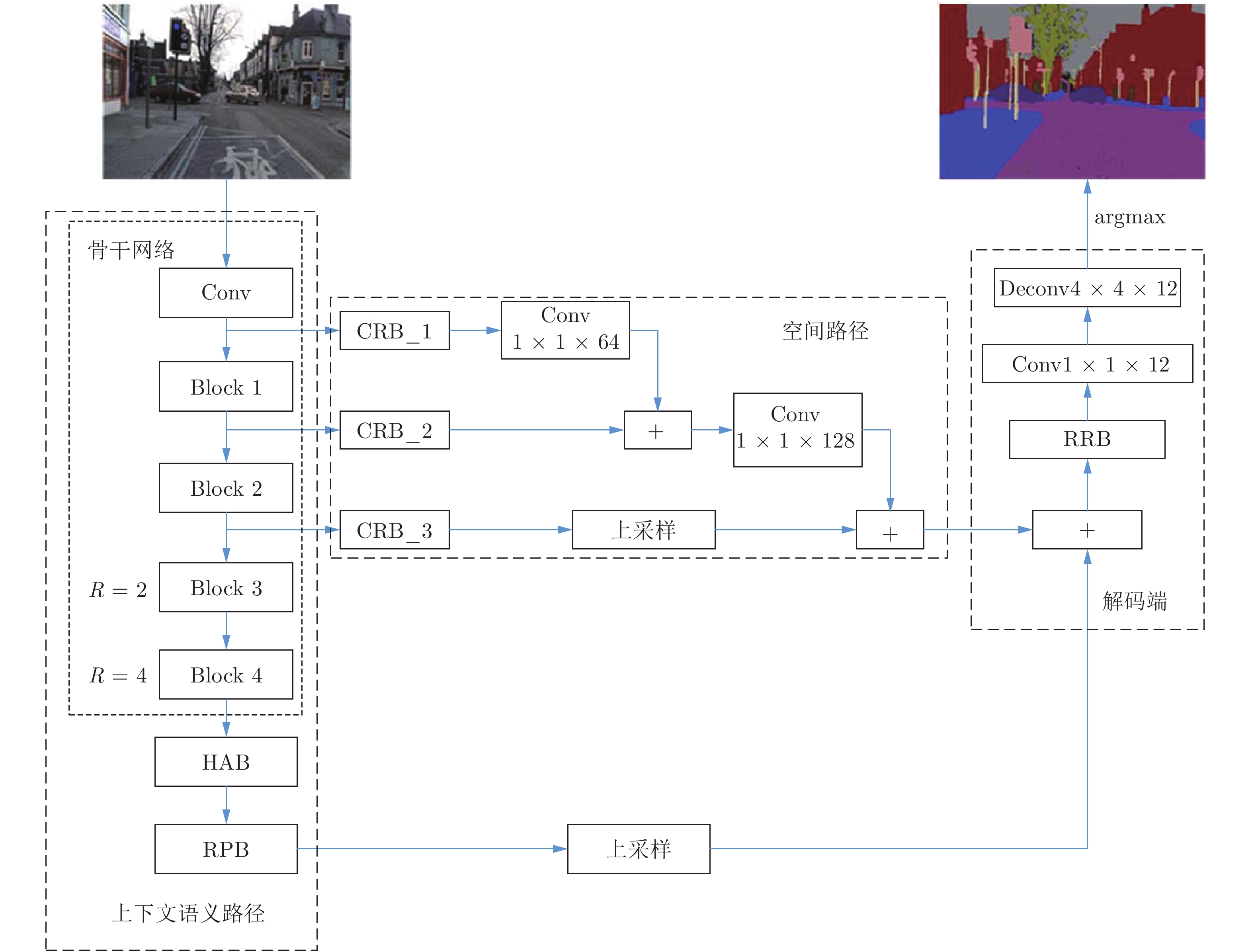
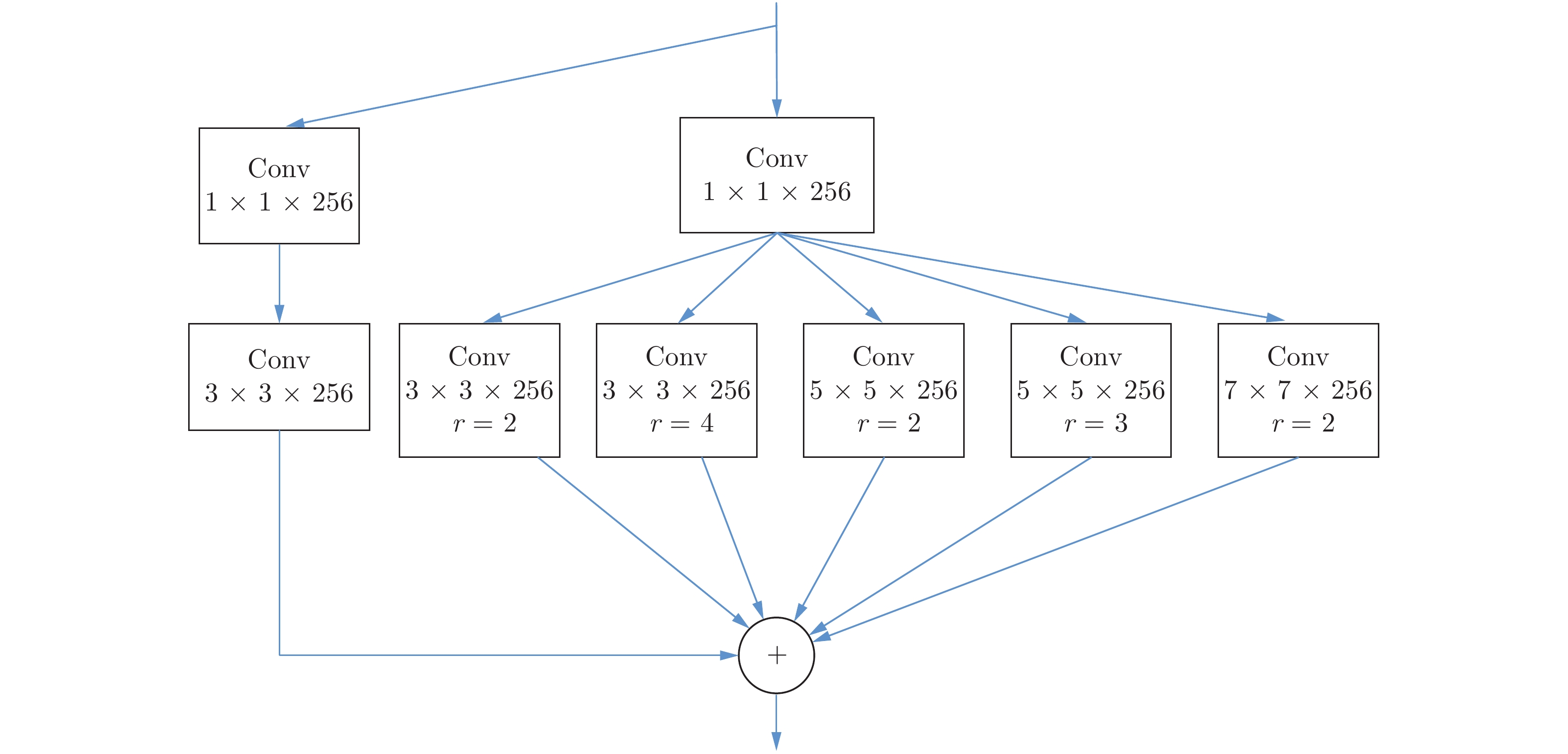
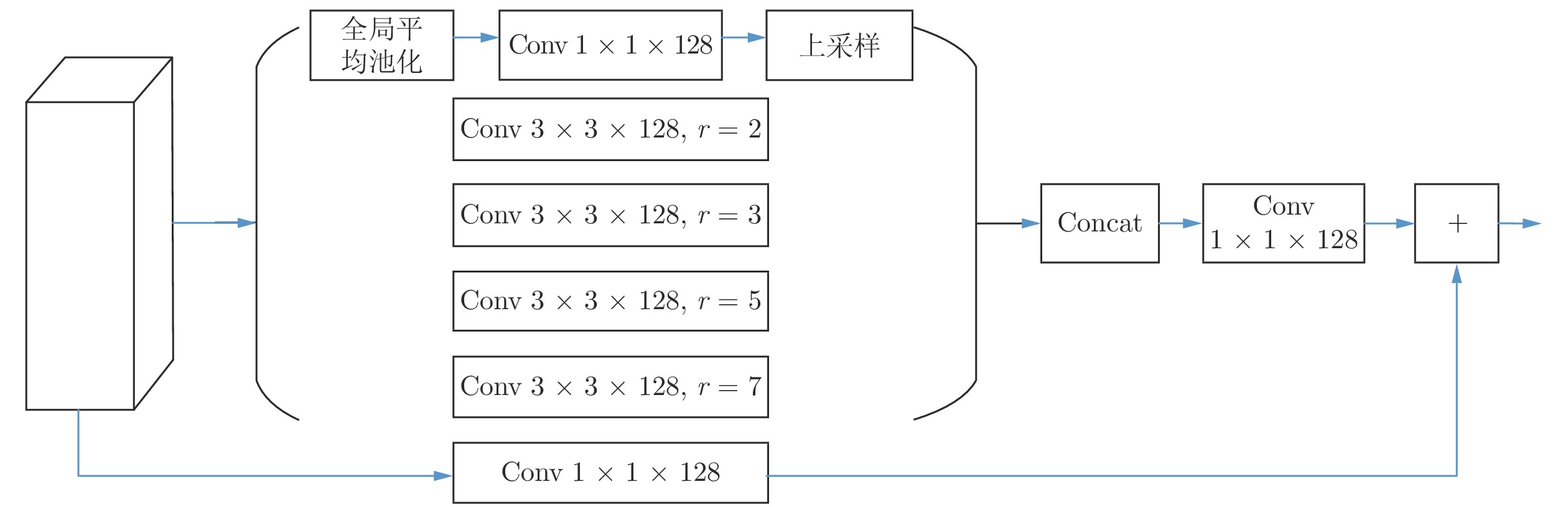
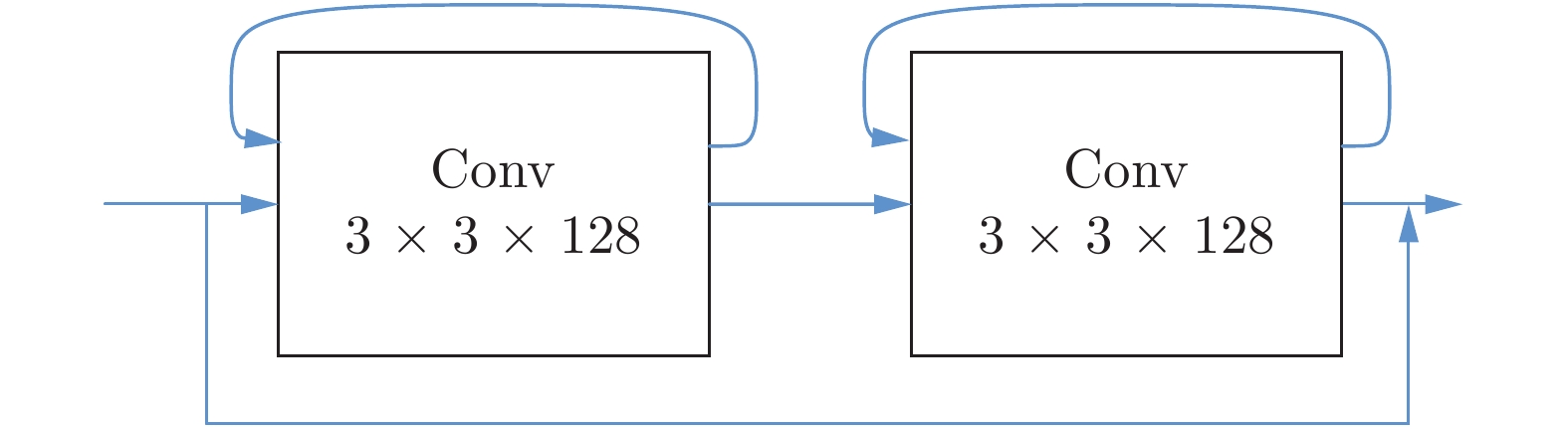
当前图像语义分割研究基本围绕如何提取有效的语义上下文信息和还原空间细节信息两个因素来设计更有效算法. 现有的语义分割模型, 有的采用全卷积网络结构以获取有效的语义上下文信息, 而忽视了网络浅层的空间细节信息; 有的采用U型结构, 通过复杂的网络连接利用编码端的空间细节信息, 但没有获取高质量的语义上下文特征. 针对此问题, 本文提出了一种新的基于上下文和浅层空间编解码网络的语义分割解决方案. 在编码端, 采用二分支策略, 其中上下文分支设计了一个新的语义上下文模块来获取高质量的语义上下文信息, 而空间分支设计成反U型结构, 并结合链式反置残差模块, 在保留空间细节信息的同时提升语义信息. 在解码端, 本文设计了优化模块对融合后的上下文信息与空间信息进一步优化. 所提出的方法在3个基准数据集CamVid、SUN RGB-D和Cityscapes上取得了有竞争力的结果.
当前图像语义分割研究基本围绕如何提取有效的语义上下文信息和还原空间细节信息两个因素来设计更有效算法. 现有的语义分割模型, 有的采用全卷积网络结构以获取有效的语义上下文信息, 而忽视了网络浅层的空间细节信息; 有的采用U型结构, 通过复杂的网络连接利用编码端的空间细节信息, 但没有获取高质量的语义上下文特征. 针对此问题, 本文提出了一种新的基于上下文和浅层空间编解码网络的语义分割解决方案. 在编码端, 采用二分支策略, 其中上下文分支设计了一个新的语义上下文模块来获取高质量的语义上下文信息, 而空间分支设计成反U型结构, 并结合链式反置残差模块, 在保留空间细节信息的同时提升语义信息. 在解码端, 本文设计了优化模块对融合后的上下文信息与空间信息进一步优化. 所提出的方法在3个基准数据集CamVid、SUN RGB-D和Cityscapes上取得了有竞争力的结果.





2022, 48(7): 1847-1860.
doi: 10.16383/j.aas.c200106
摘要:
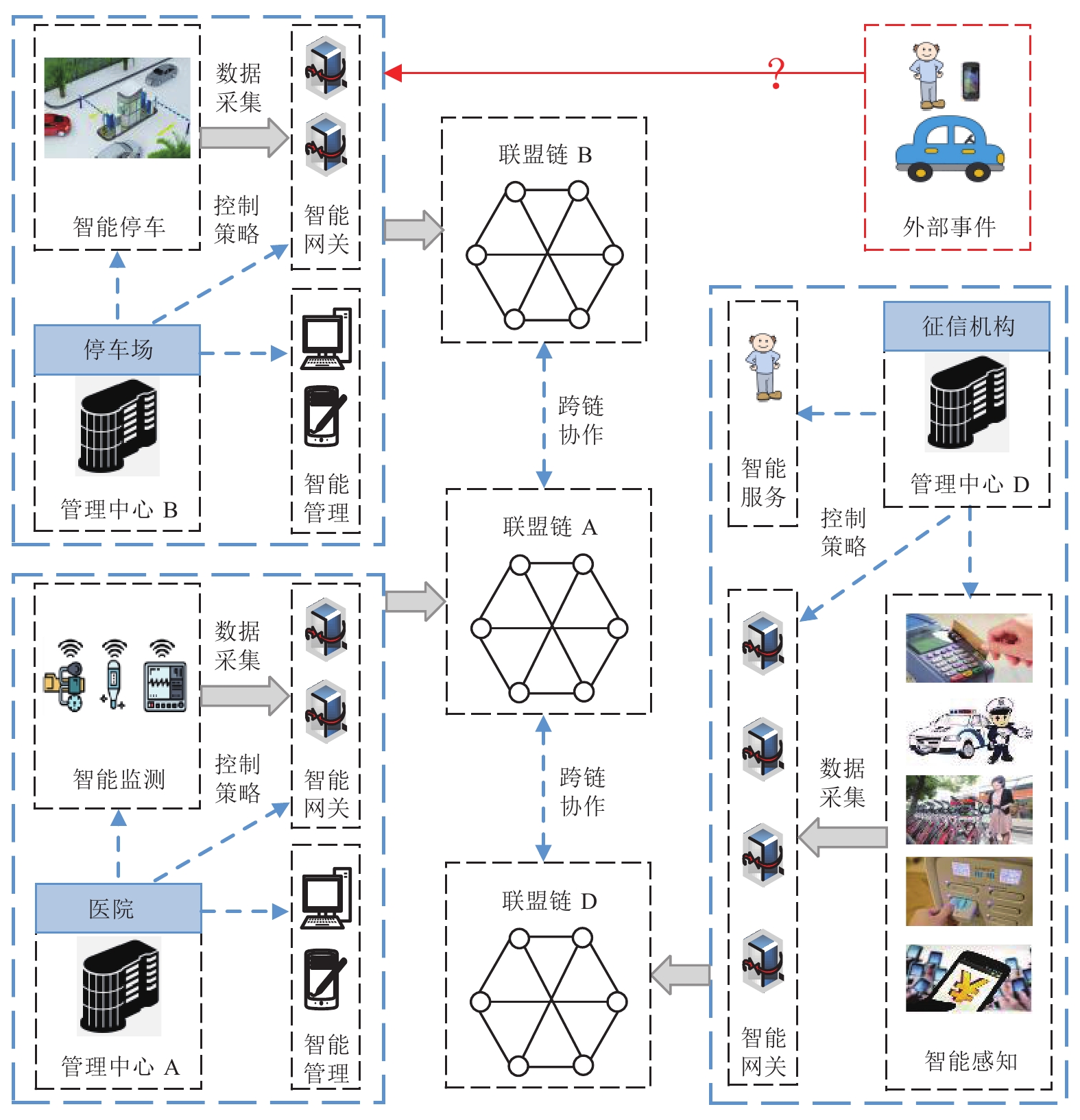
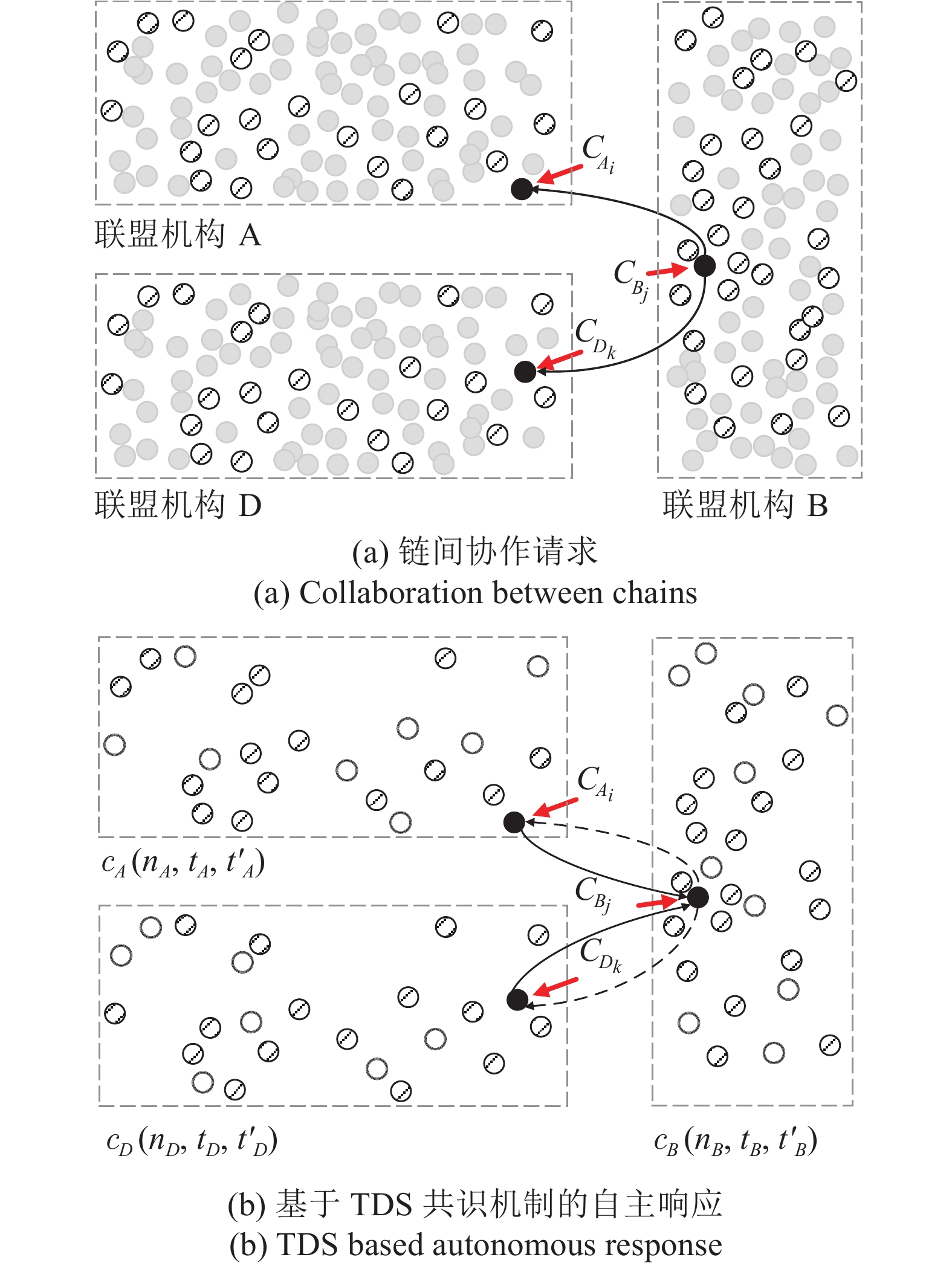
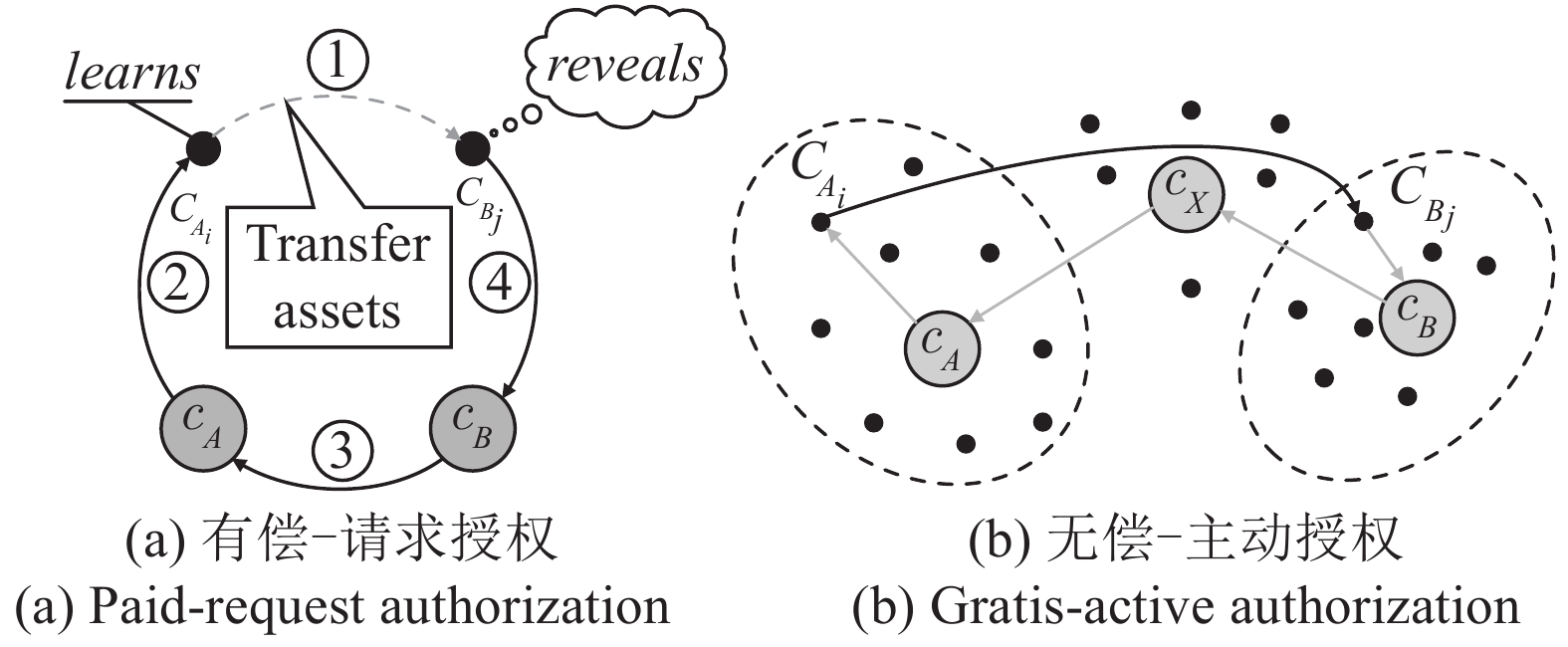
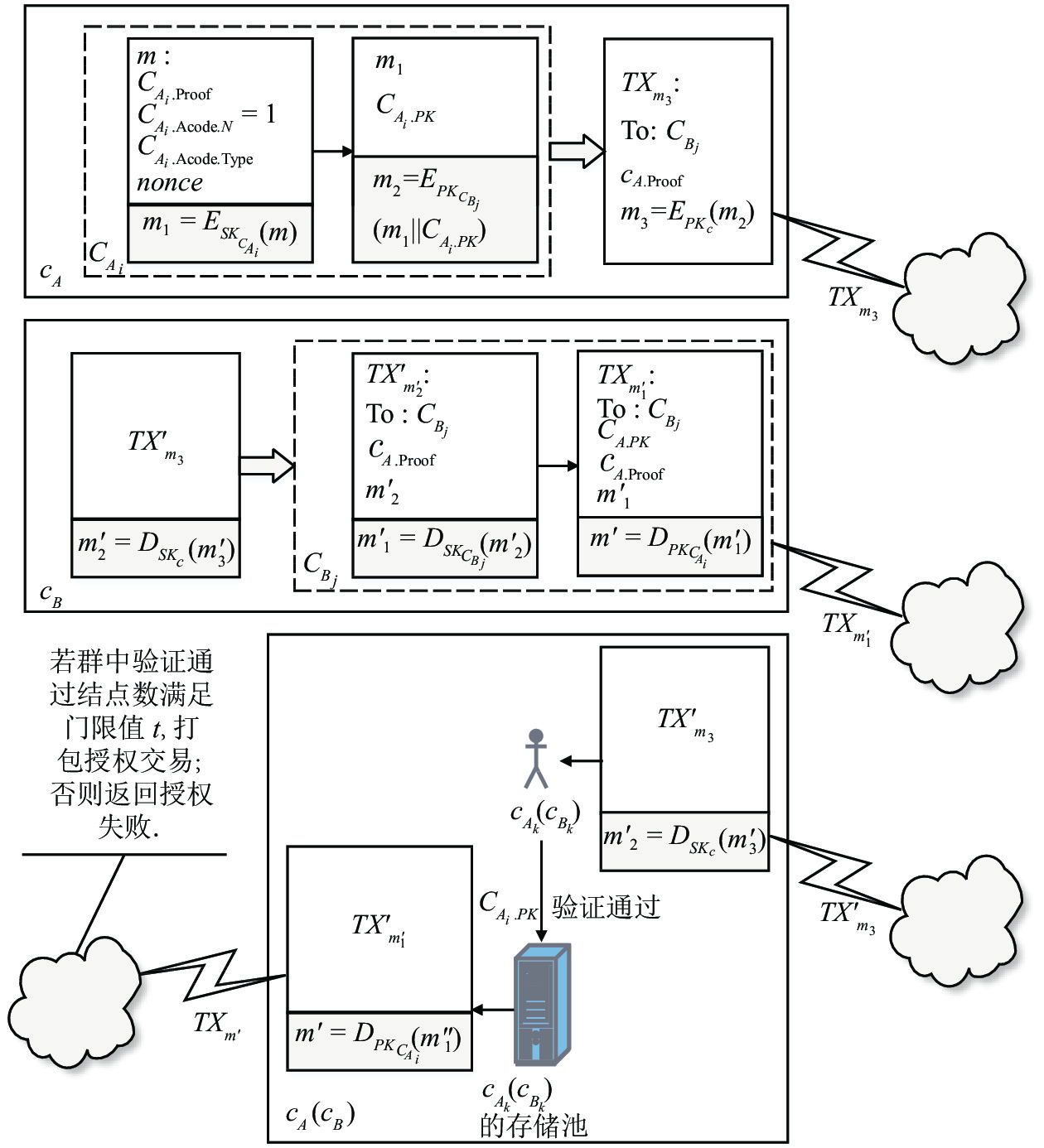
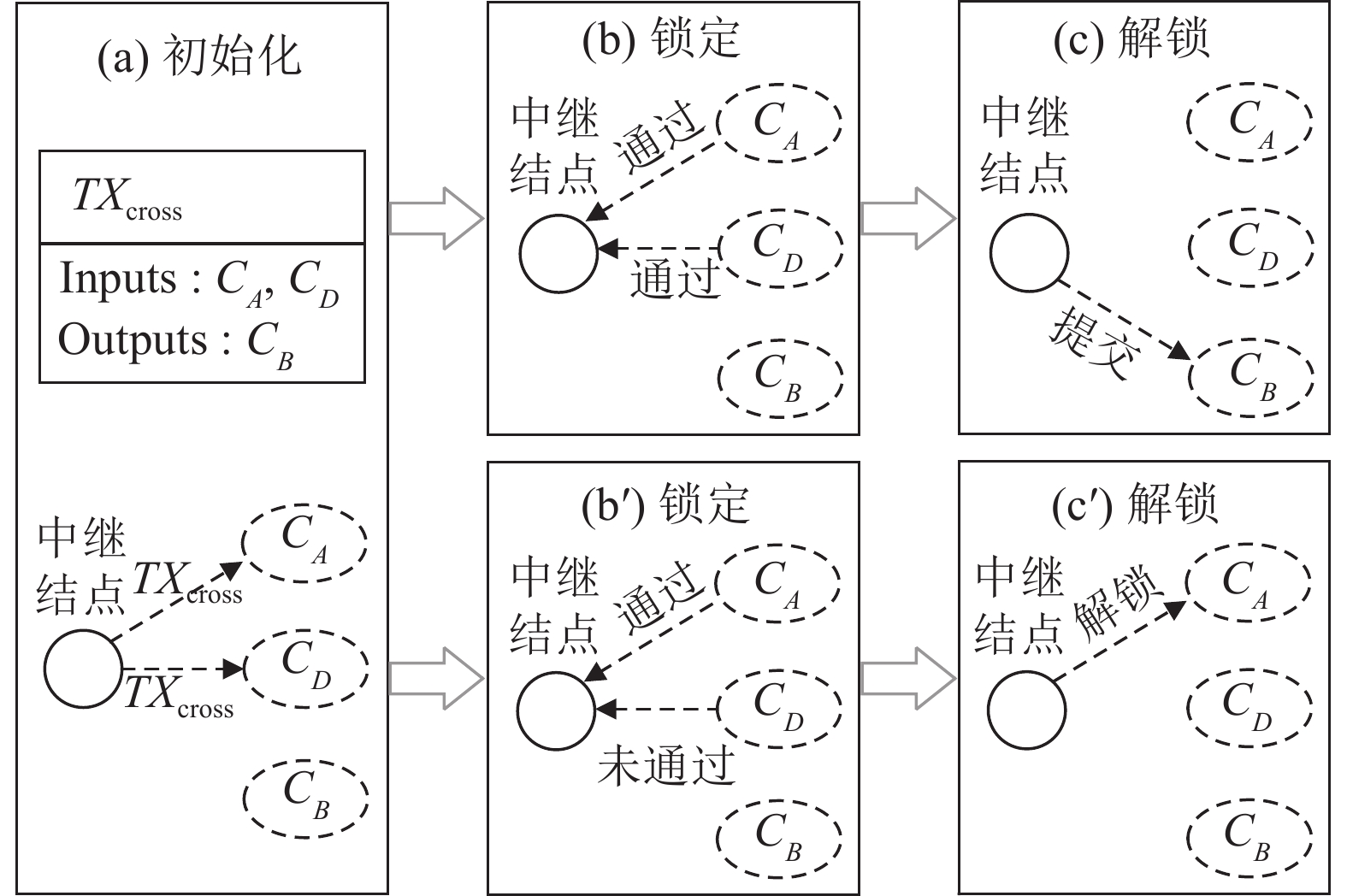
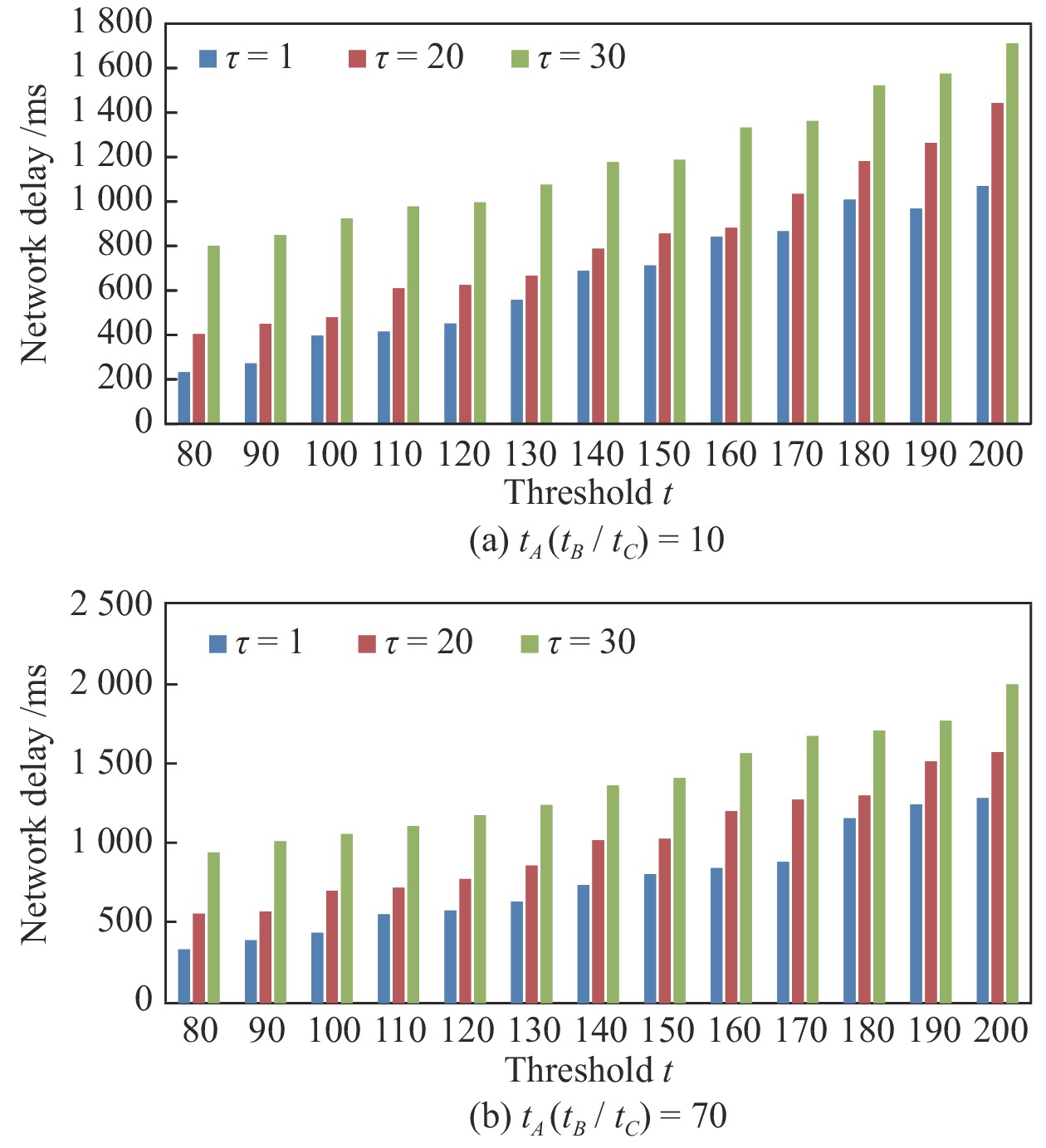
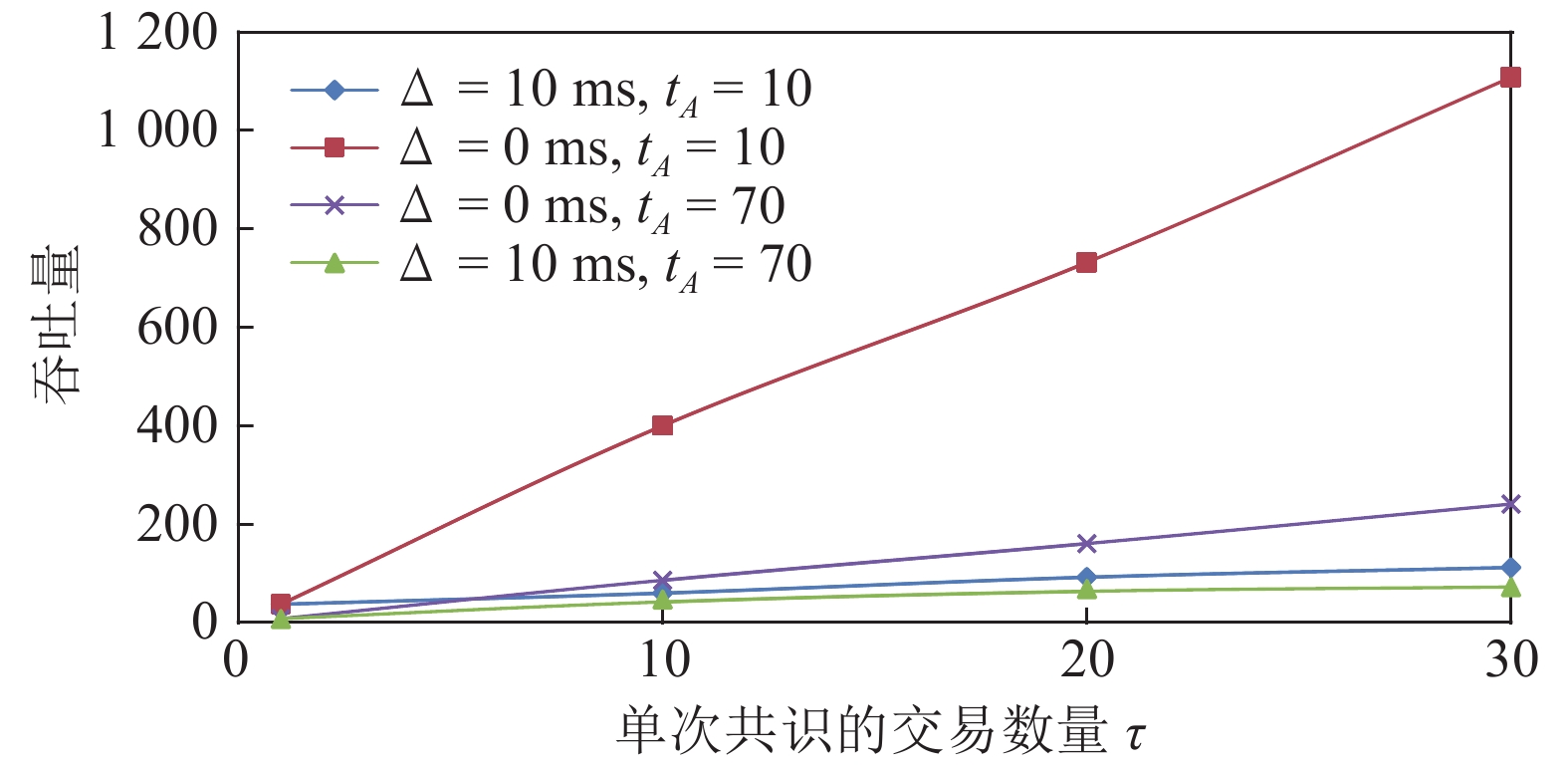
联盟链具有公有链固有的安全性, 其许可准入机制允许对网络结点及规模进行控制, 恰好迎合了物联网(Internet of things, IoT)向规模化、智能化发展的需要, 成为物联网学术界研究的热点. 然而, 联盟链在一定程度上违背了区块链去中心化价值和信任体系, 产生了多中心化的复杂区块链生态体系, 为使物联网数字资产在不同联盟链间安全、自主、动态流转, 迫切需要对涉及多个联盟链的复杂系统通信机制进行研究. 基于存在多个特权子群的门限数字签名机制建立多联盟链链间合作共识, 利用授权码构造身份证明, 实现链间实体自主授权过程; 构建跨联盟链交易原子提交协议, 确保异步授权状态同步; 提出多级混合可选信任—验证交易共识机制. 实验表明, 上述机制能够在优化系统性能的同时确保系统的安全性.
联盟链具有公有链固有的安全性, 其许可准入机制允许对网络结点及规模进行控制, 恰好迎合了物联网(Internet of things, IoT)向规模化、智能化发展的需要, 成为物联网学术界研究的热点. 然而, 联盟链在一定程度上违背了区块链去中心化价值和信任体系, 产生了多中心化的复杂区块链生态体系, 为使物联网数字资产在不同联盟链间安全、自主、动态流转, 迫切需要对涉及多个联盟链的复杂系统通信机制进行研究. 基于存在多个特权子群的门限数字签名机制建立多联盟链链间合作共识, 利用授权码构造身份证明, 实现链间实体自主授权过程; 构建跨联盟链交易原子提交协议, 确保异步授权状态同步; 提出多级混合可选信任—验证交易共识机制. 实验表明, 上述机制能够在优化系统性能的同时确保系统的安全性.





2022, 48(7): 1861-1868.
doi: 10.16383/j.aas.c190141
摘要:
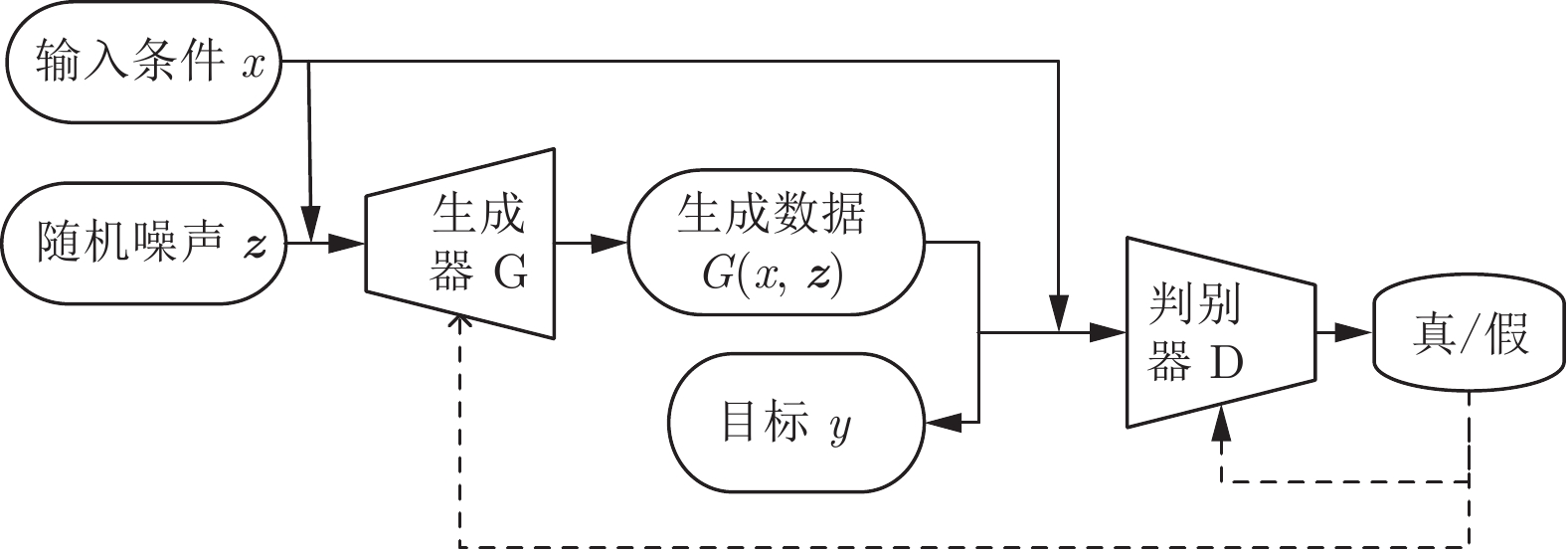
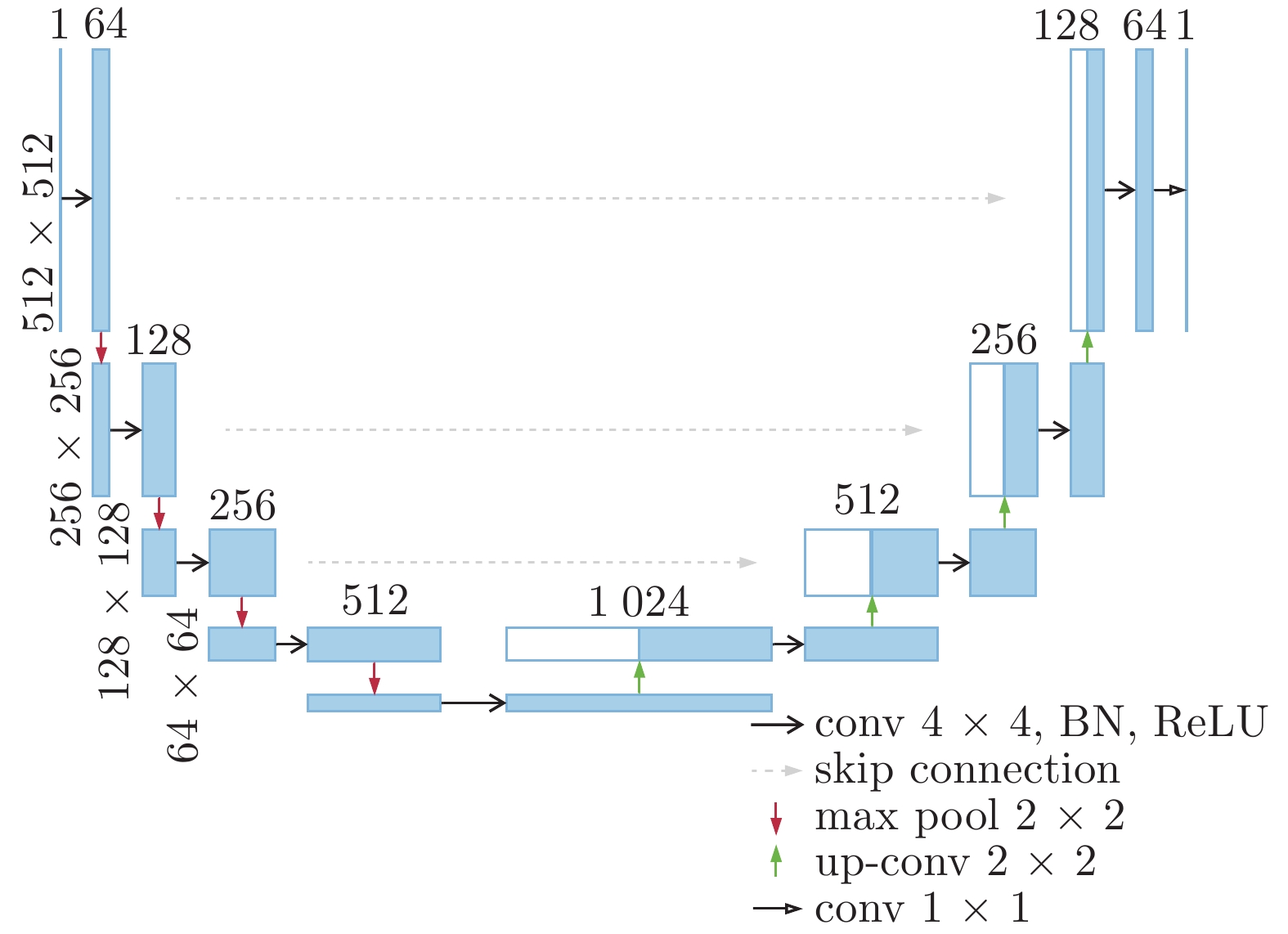
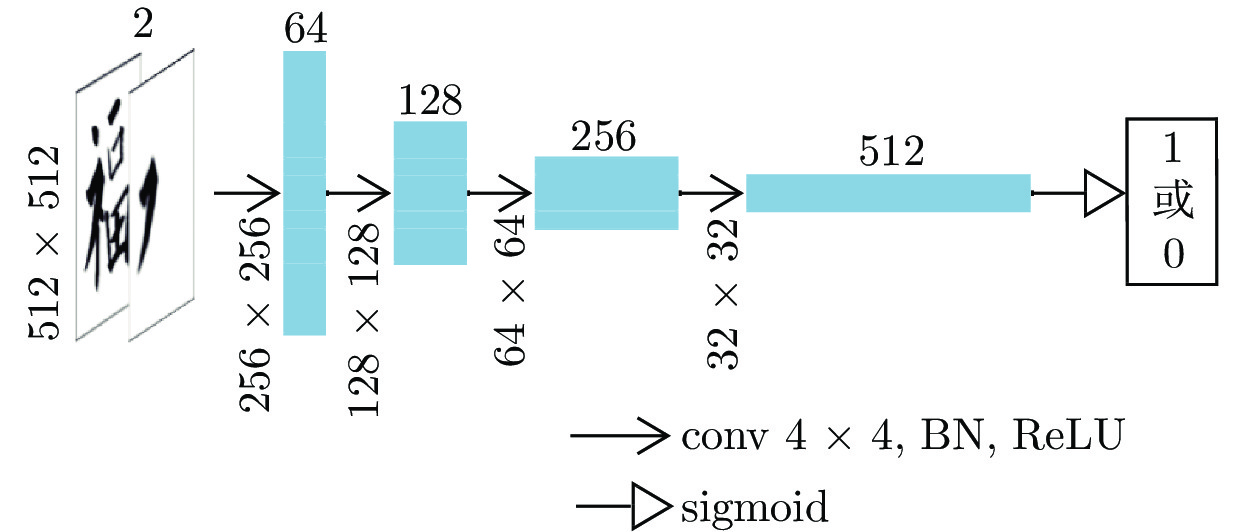
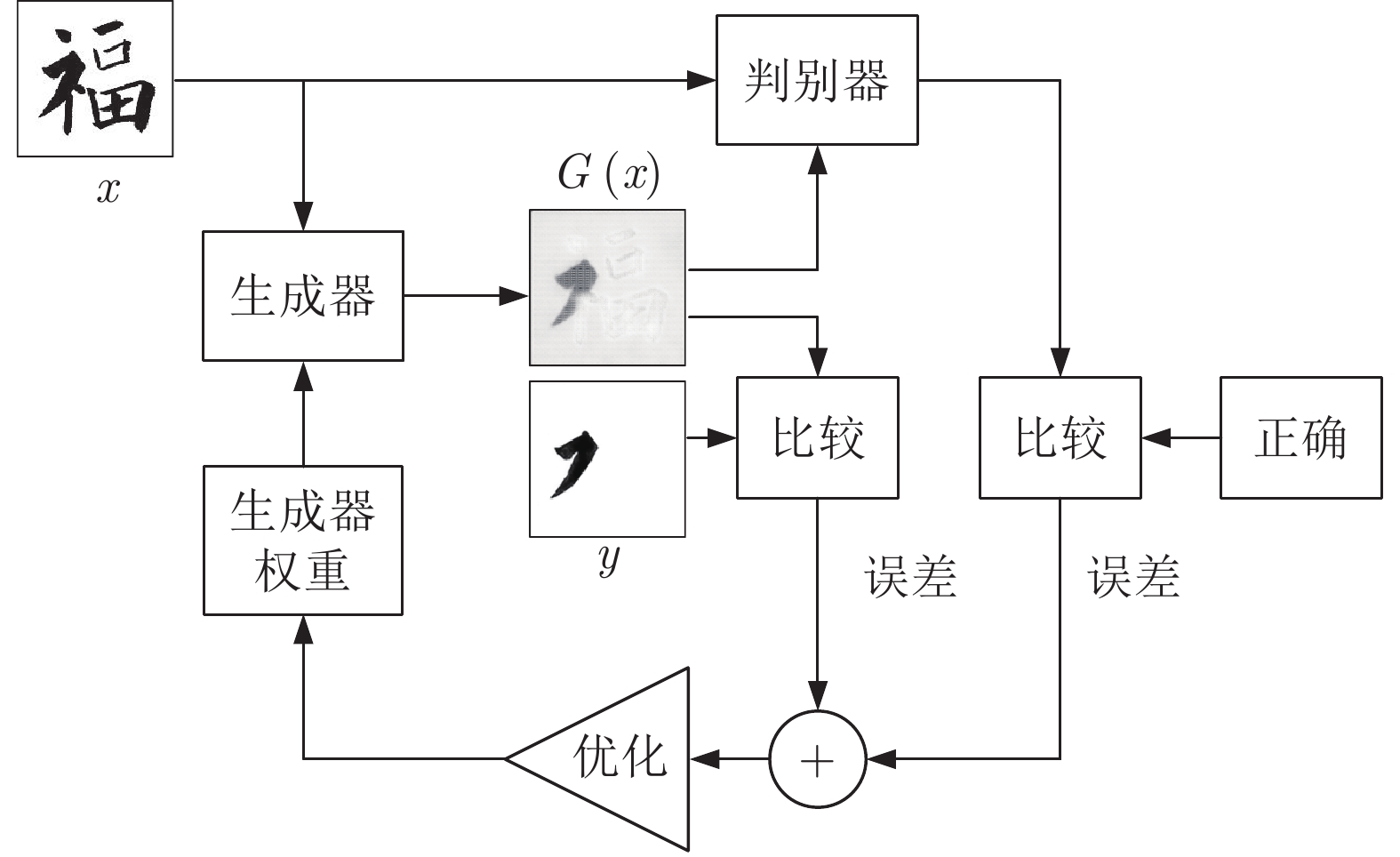
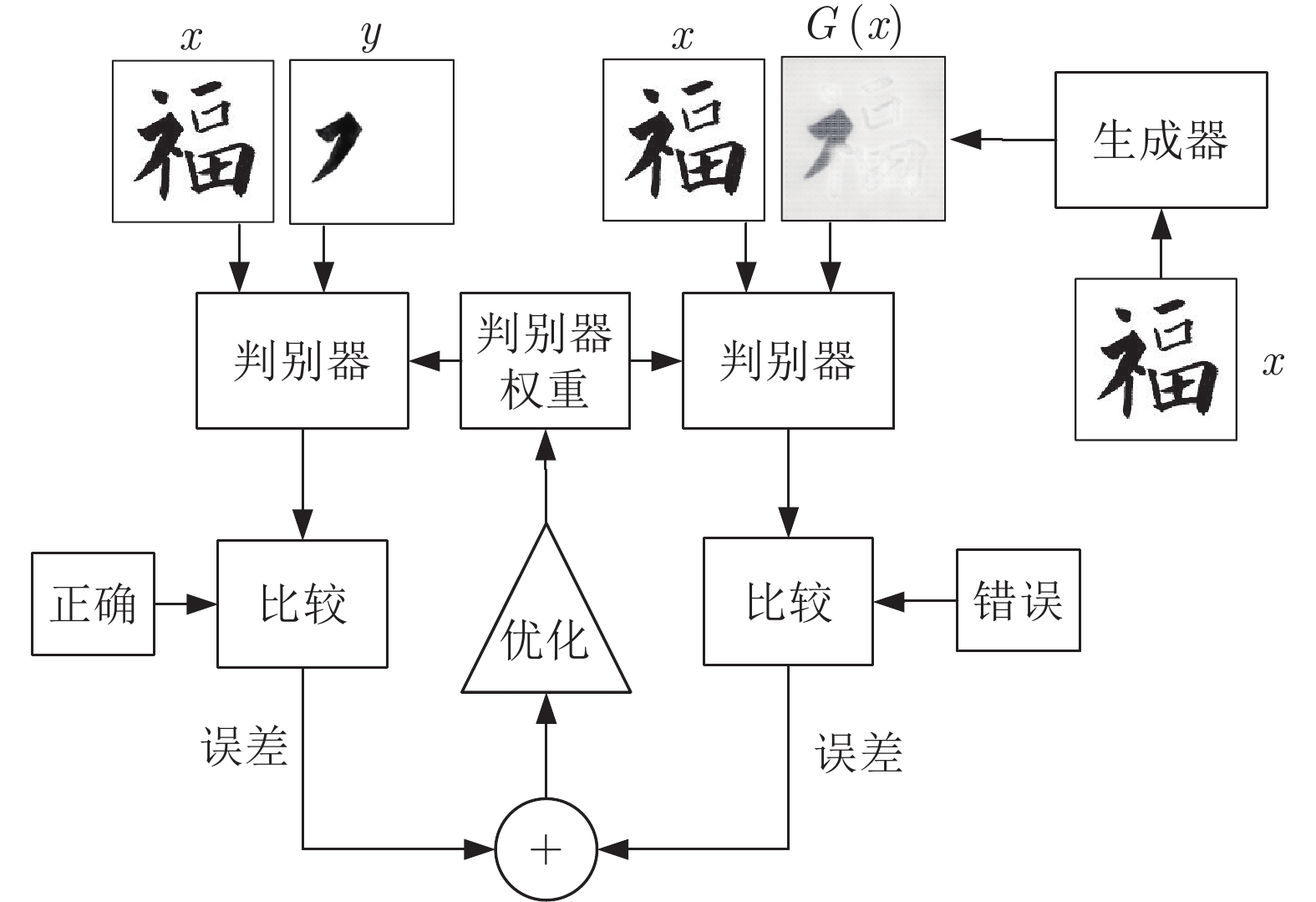
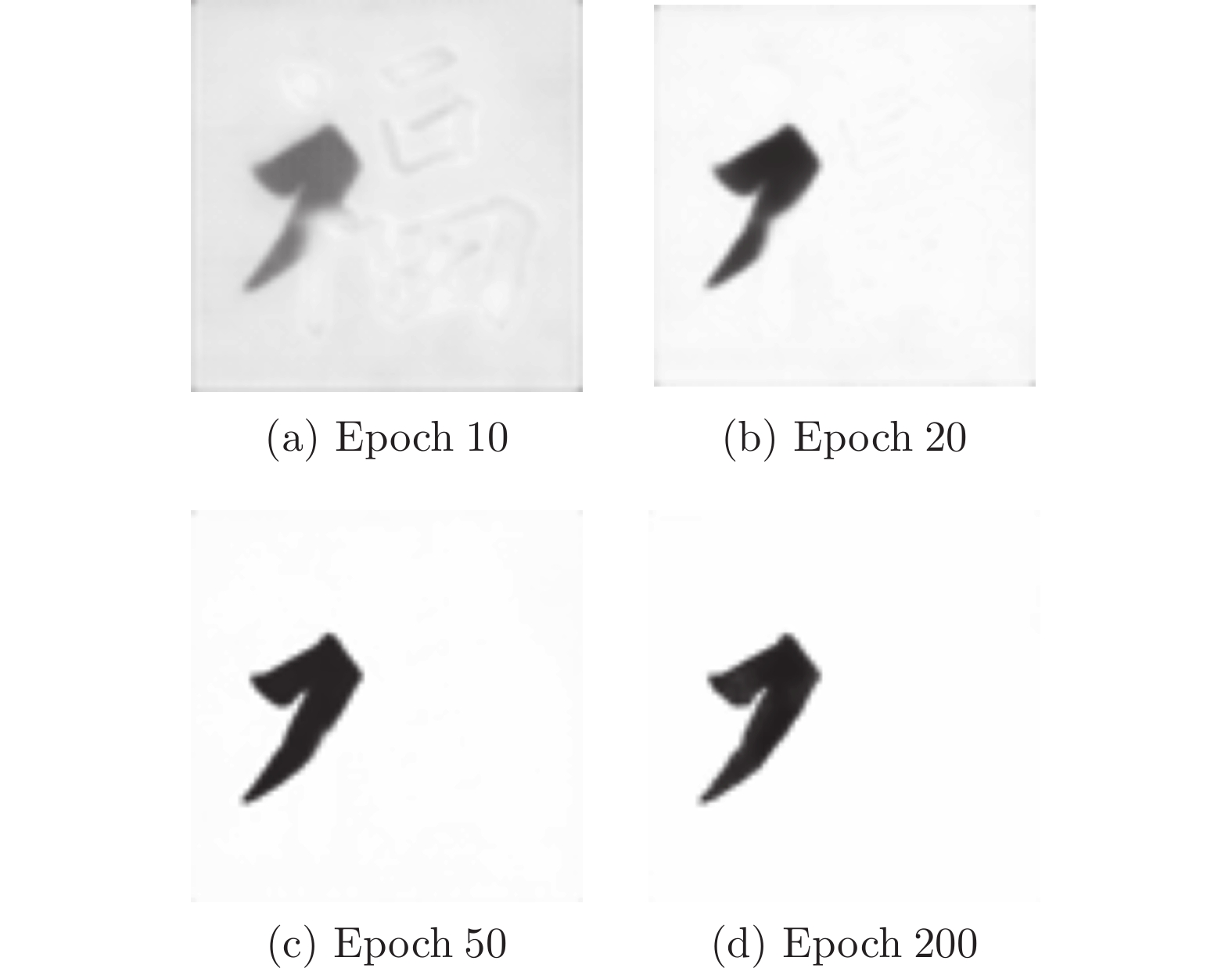
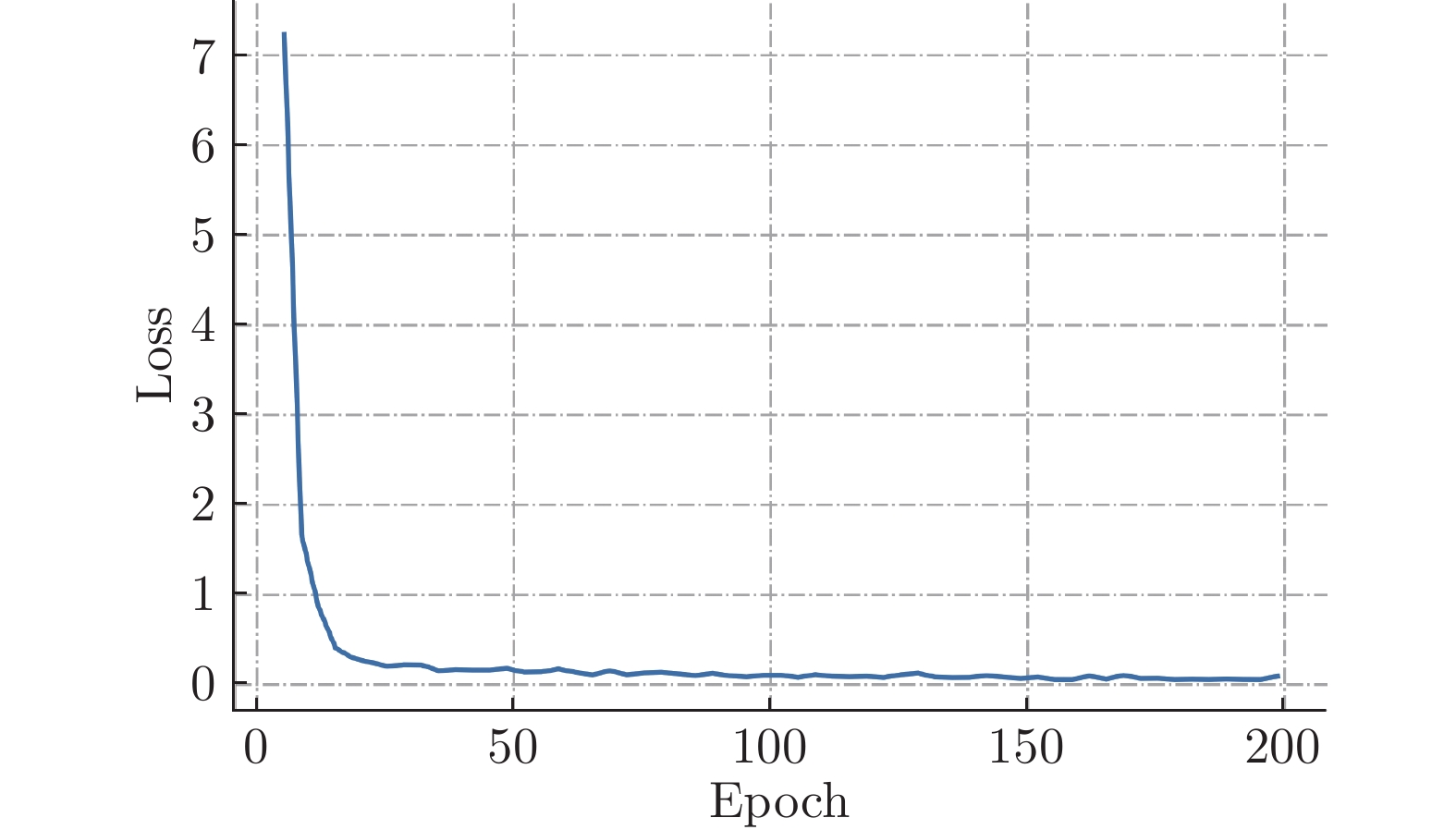
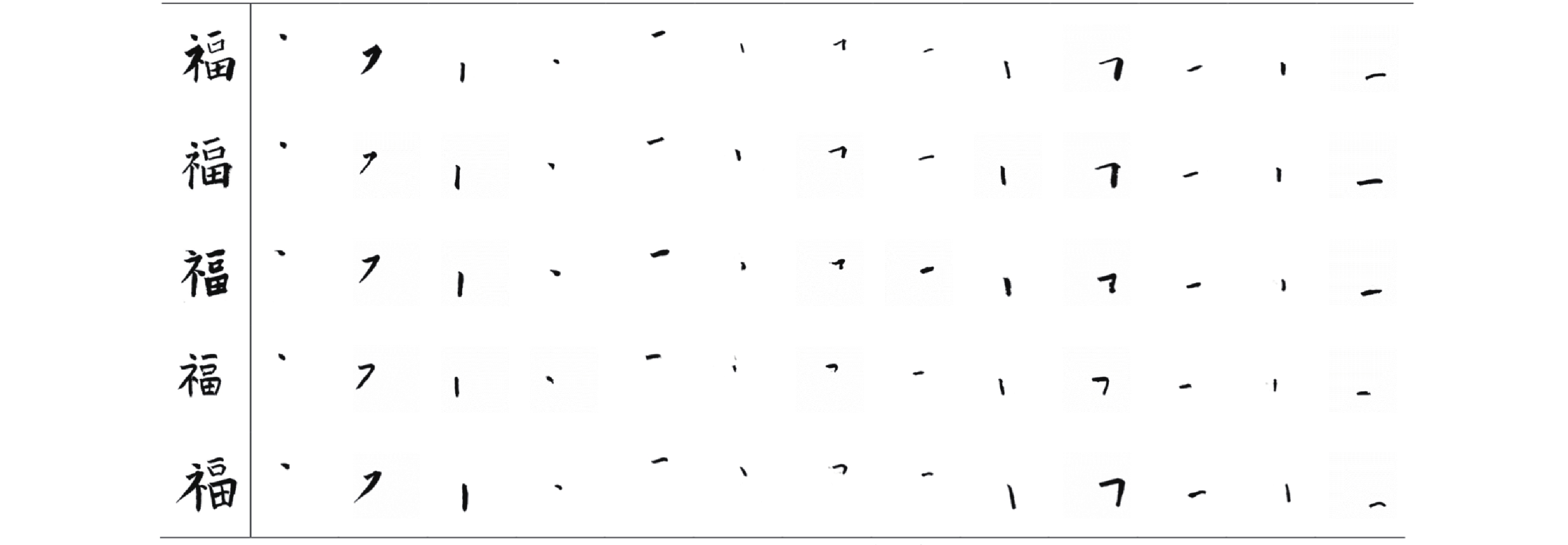
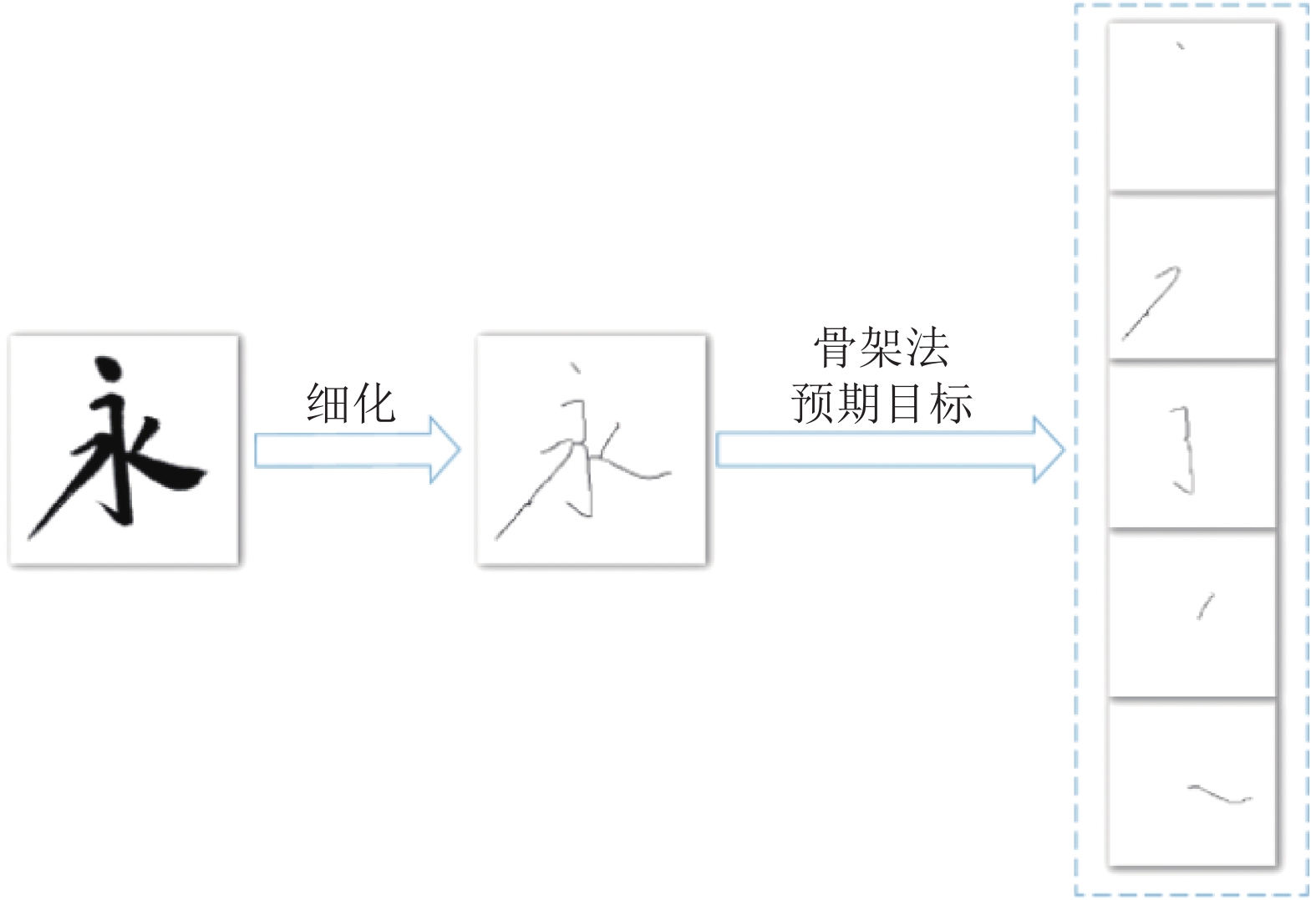
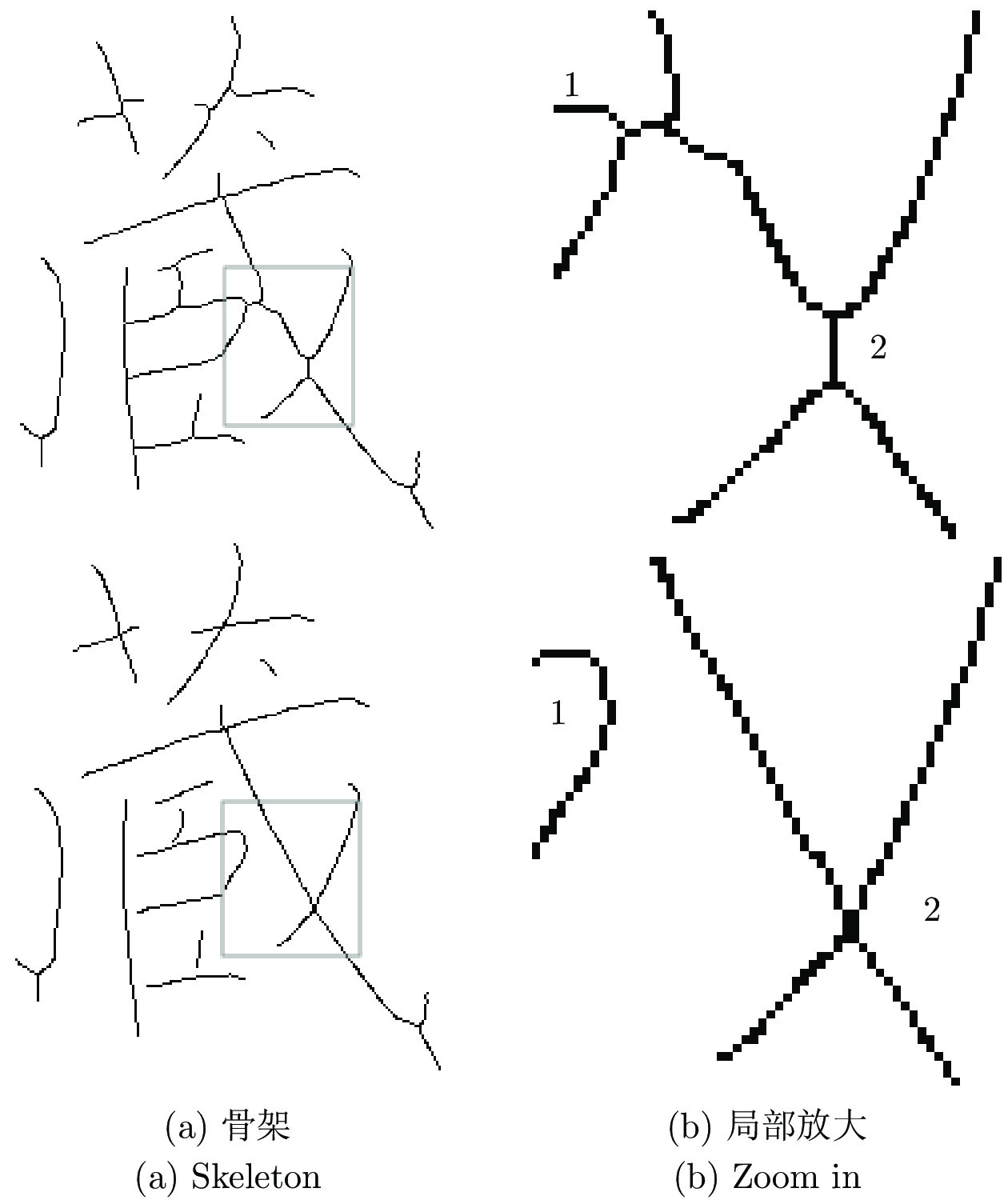
毛笔书法作为中华传统艺术的精华, 需要在新的时代背景下继续传承和发扬. 书法字是以笔画为基本单元组成的复杂图形, 如果要分析书法结构, 笔画分割是首要的步骤. 传统的笔画分割方法主要利用细化法从汉字骨架上提取特征点, 分析交叉区域的子笔画拓扑结构关系来分割笔画. 本文分析了传统笔画分割基于底层特征拆分笔画的局限性, 利用条件生成对抗网络(Conditional generative adversarial network, CGAN)的对抗学习机制直接分割笔画, 使提取笔画从先细化再分割改进为直接分割. 该方法能有效提取出精确的笔画, 得到的高层语义特征和保留完整信息的单个笔画利于后续对书法轮廓和结构的评价.
毛笔书法作为中华传统艺术的精华, 需要在新的时代背景下继续传承和发扬. 书法字是以笔画为基本单元组成的复杂图形, 如果要分析书法结构, 笔画分割是首要的步骤. 传统的笔画分割方法主要利用细化法从汉字骨架上提取特征点, 分析交叉区域的子笔画拓扑结构关系来分割笔画. 本文分析了传统笔画分割基于底层特征拆分笔画的局限性, 利用条件生成对抗网络(Conditional generative adversarial network, CGAN)的对抗学习机制直接分割笔画, 使提取笔画从先细化再分割改进为直接分割. 该方法能有效提取出精确的笔画, 得到的高层语义特征和保留完整信息的单个笔画利于后续对书法轮廓和结构的评价.