2022年 第48卷 第9期
2022, 48(9): 2119-2141.
doi: 10.16383/j.aas.c201068
摘要:
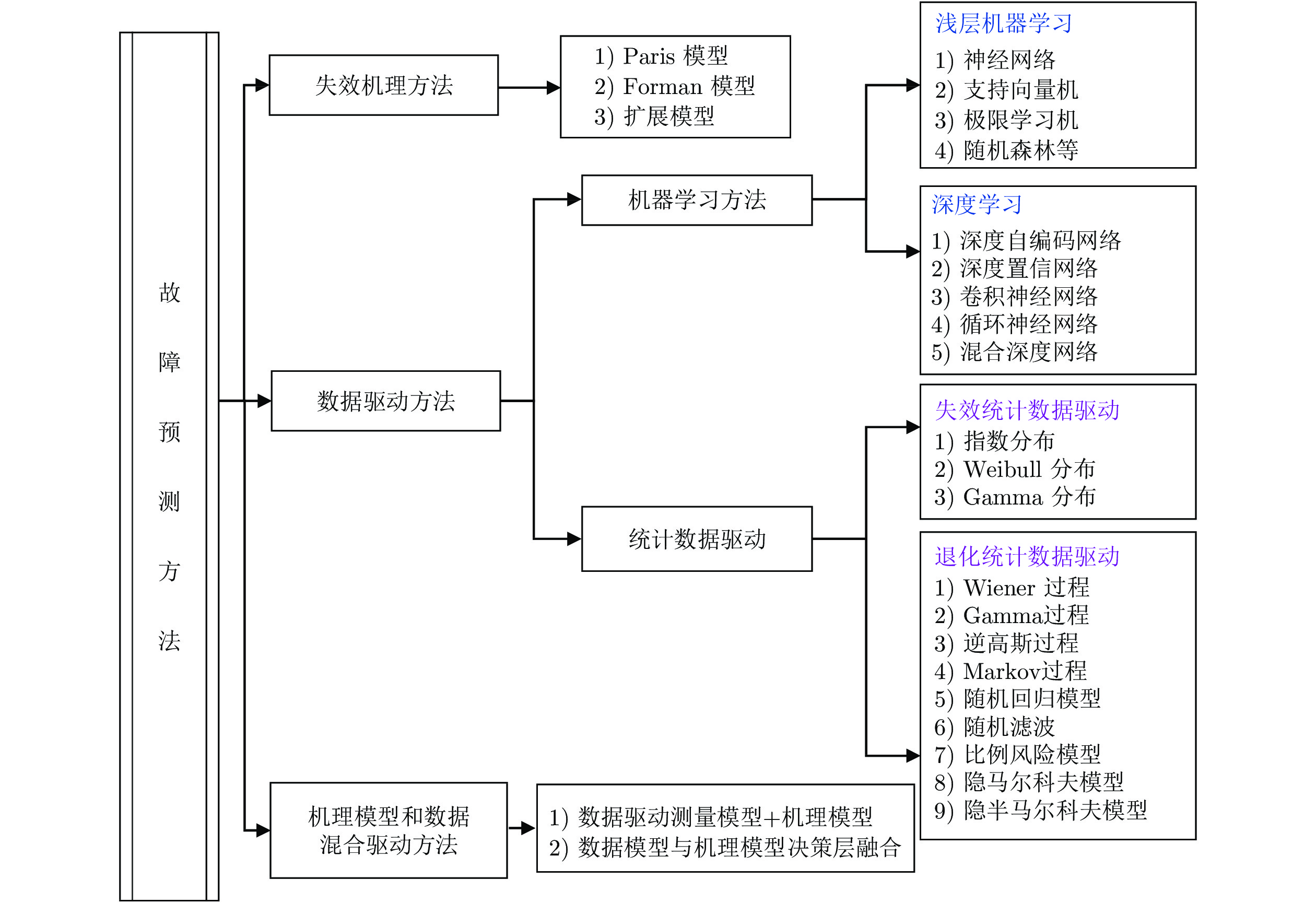
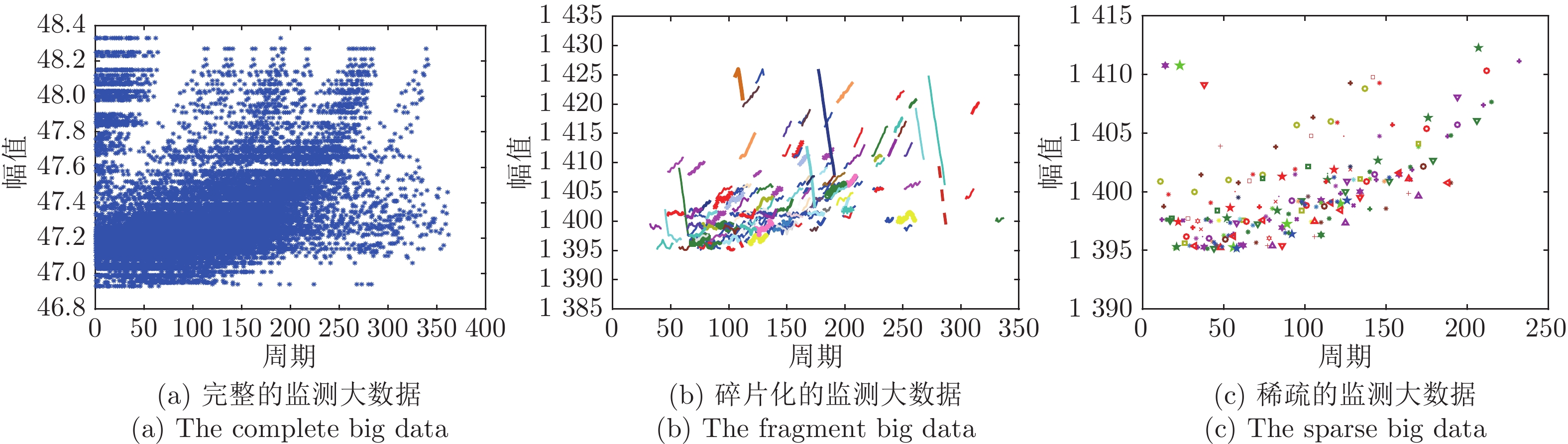
面向大数据背景下随机退化设备剩余寿命(Remaining useful life, RUL)预测的现实需求, 结合随机退化设备监测大数据特点及剩余寿命预测不确定性量化这一核心问题, 深入分析了机理模型与数据混合驱动的剩余寿命预测技术、基于机器学习的剩余寿命预测技术、统计数据驱动的剩余寿命预测技术以及机器学习和统计数据驱动相结合的剩余寿命预测技术的基本研究思想和发展动态, 剖析了当前研究存在的局限性和共性难题. 针对存在的局限性和共性难题, 以多源传感监测大数据下剩余寿命预测问题为例, 提出了一种数模联动的大数据下随机退化设备剩余寿命预测解决思路, 并通过航空发动机多源监测数据初步验证了该思路的可行性和有效性. 最后, 借鉴数模联动思路, 综合考虑机器学习方法和统计数据驱动方法的优势, 紧紧扭住大数据背景下随机退化设备剩余寿命预测不确定性量化问题, 提出了大数据背景下深度学习与随机退化建模交互联动、监测大数据与剩余寿命及其预测不确定性映射机制、非理想大数据下的剩余寿命预测等亟待解决的关键科学问题.
面向大数据背景下随机退化设备剩余寿命(Remaining useful life, RUL)预测的现实需求, 结合随机退化设备监测大数据特点及剩余寿命预测不确定性量化这一核心问题, 深入分析了机理模型与数据混合驱动的剩余寿命预测技术、基于机器学习的剩余寿命预测技术、统计数据驱动的剩余寿命预测技术以及机器学习和统计数据驱动相结合的剩余寿命预测技术的基本研究思想和发展动态, 剖析了当前研究存在的局限性和共性难题. 针对存在的局限性和共性难题, 以多源传感监测大数据下剩余寿命预测问题为例, 提出了一种数模联动的大数据下随机退化设备剩余寿命预测解决思路, 并通过航空发动机多源监测数据初步验证了该思路的可行性和有效性. 最后, 借鉴数模联动思路, 综合考虑机器学习方法和统计数据驱动方法的优势, 紧紧扭住大数据背景下随机退化设备剩余寿命预测不确定性量化问题, 提出了大数据背景下深度学习与随机退化建模交互联动、监测大数据与剩余寿命及其预测不确定性映射机制、非理想大数据下的剩余寿命预测等亟待解决的关键科学问题.

2022, 48(9): 2142-2163.
doi: 10.16383/j.aas.c211189
摘要:
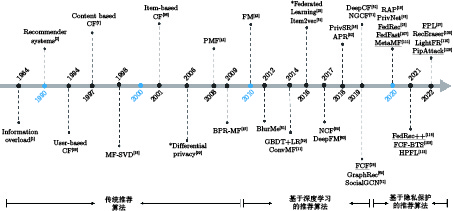
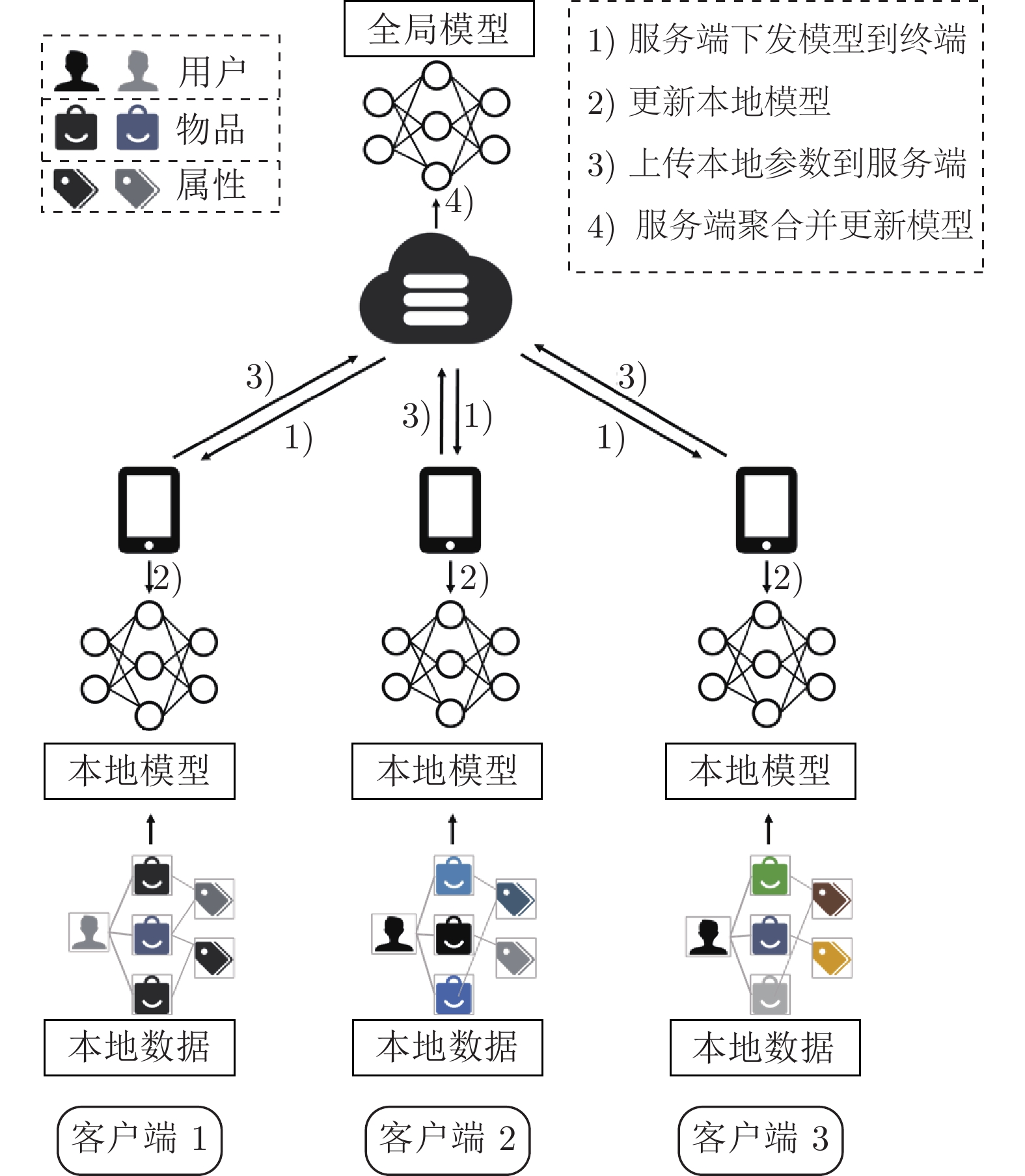
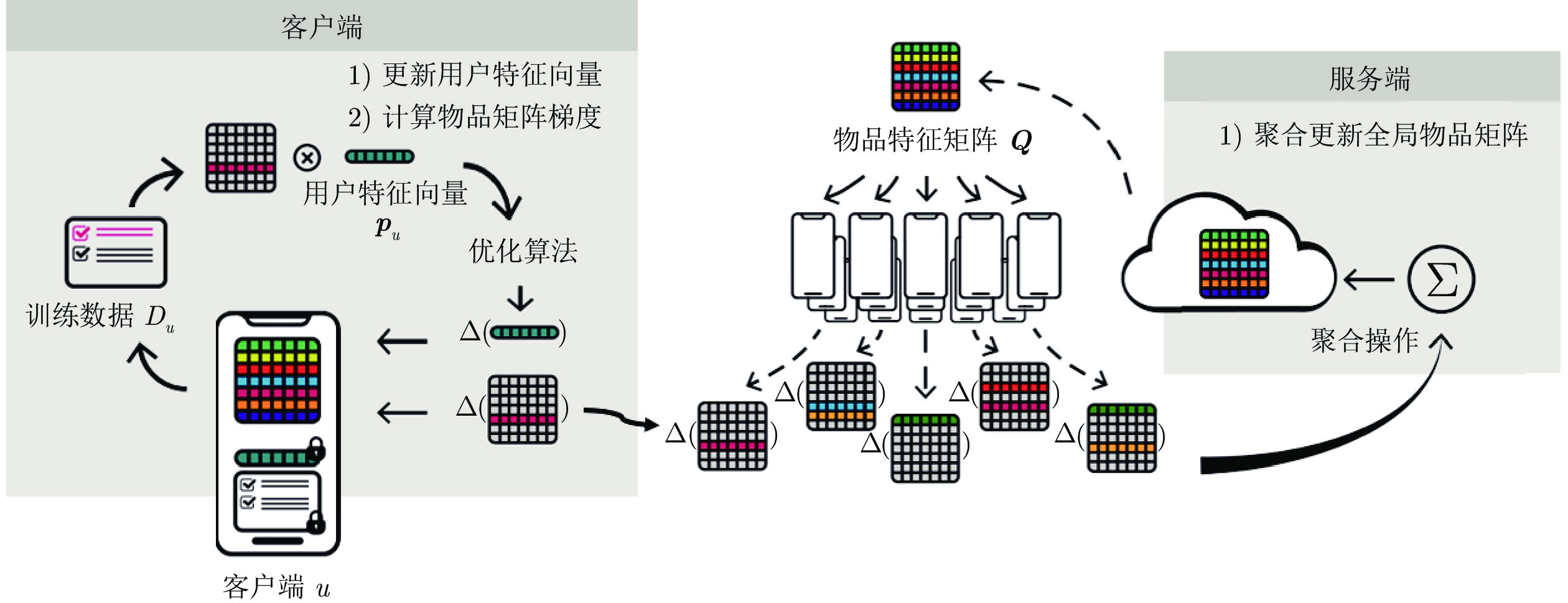
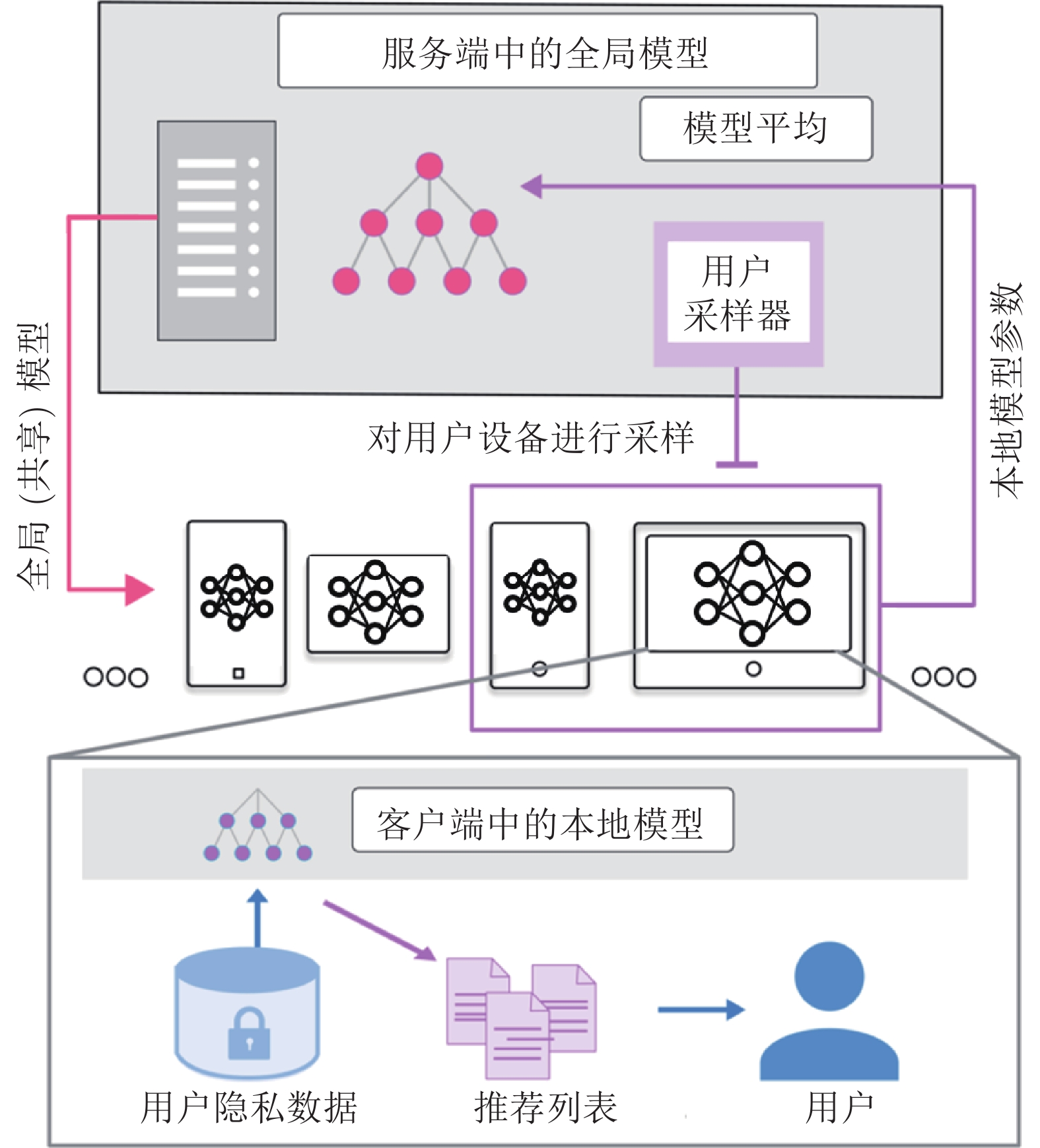
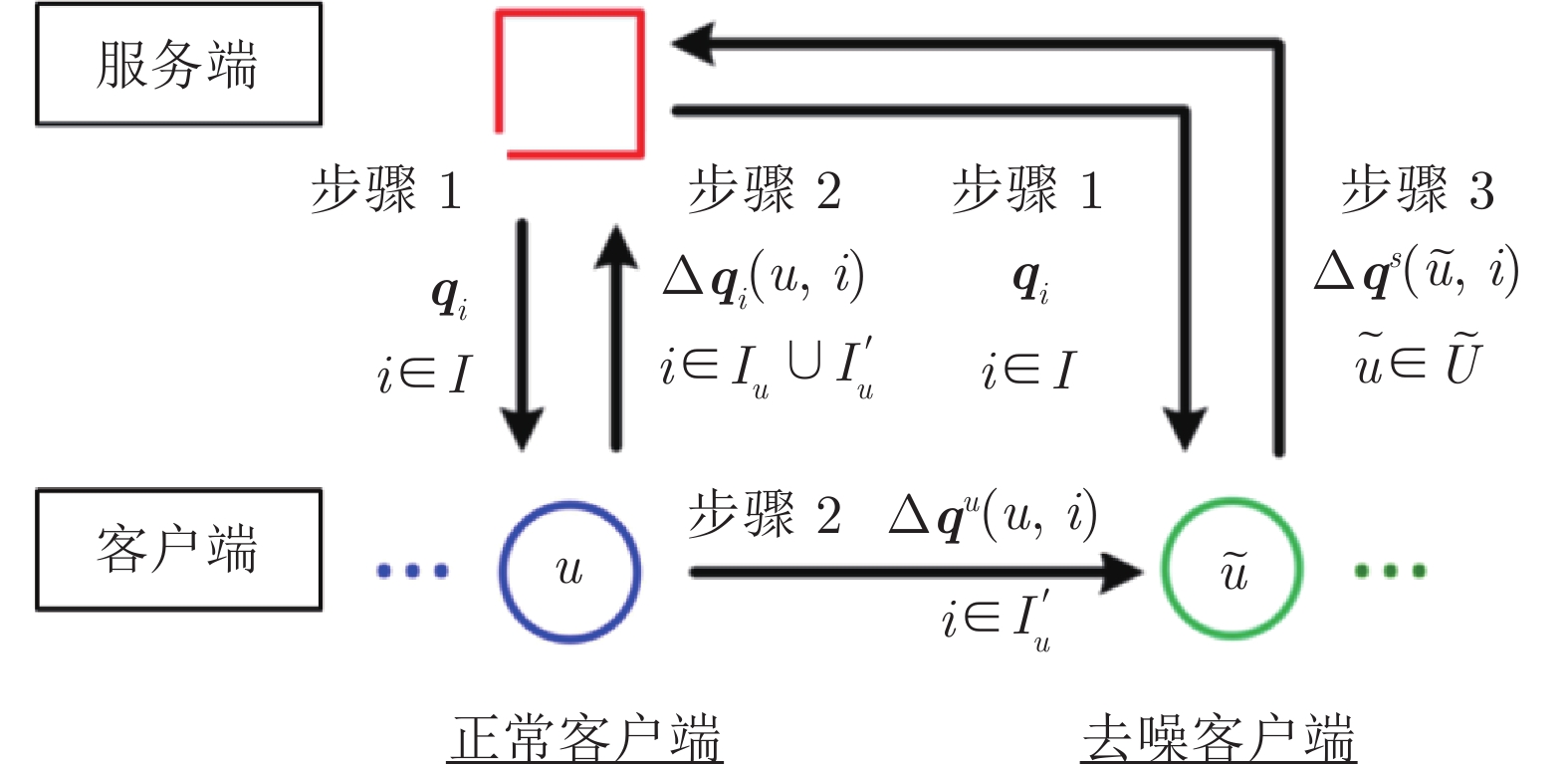
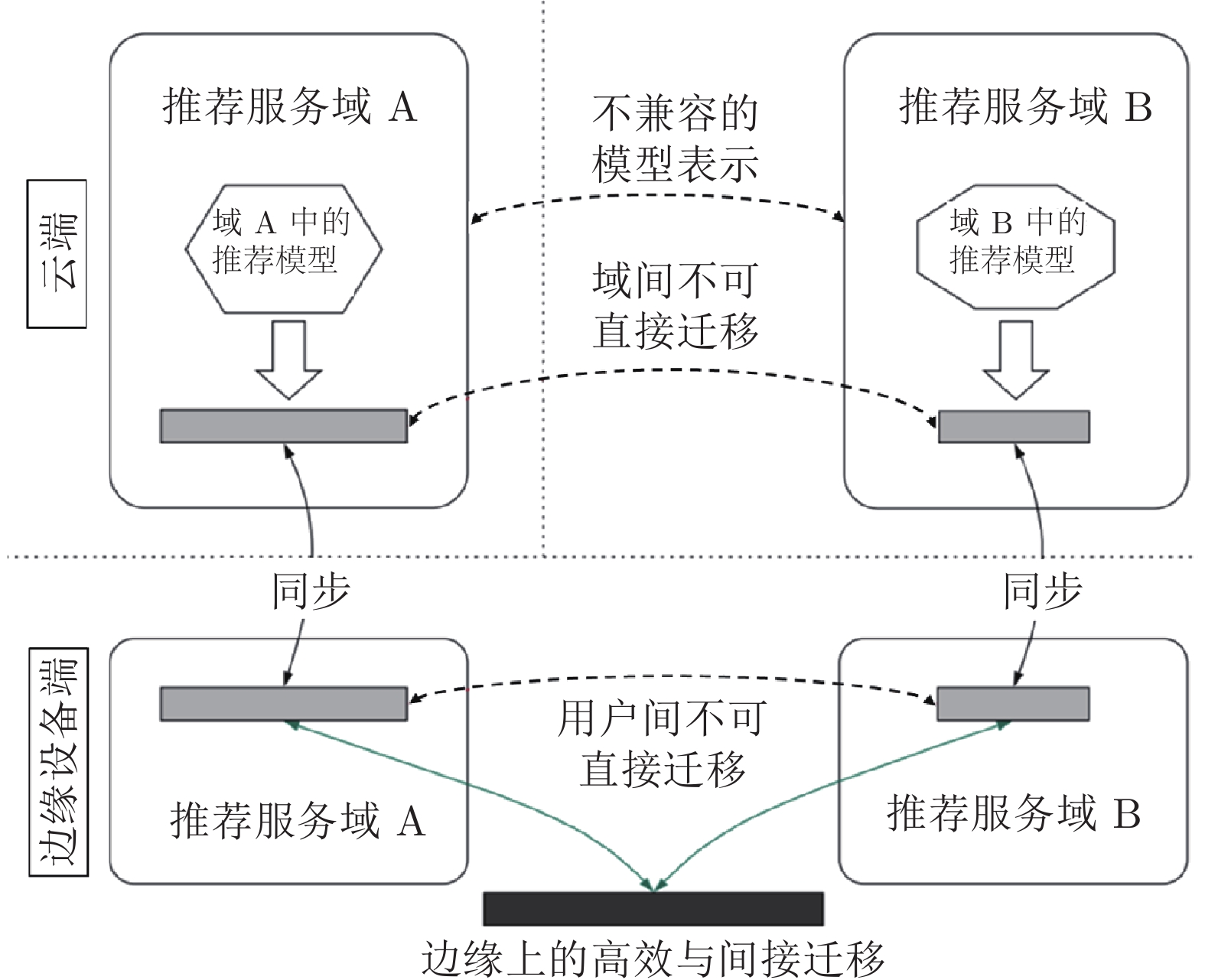
推荐系统通过集中式的存储与训练用户对物品的海量行为信息以及内容特征, 旨在为用户提供个性化的信息服务与决策支持. 然而, 海量数据背后存在大量的用户个人信息以及敏感数据, 因此如何在保证用户隐私与数据安全的前提下分析用户行为模式成为了近年来研究的热点. 联邦学习作为新兴的隐私保护范式, 能够协调多个参与方通过模型参数或者梯度等信息共同学习无损的全局共享模型, 同时保证所有的原始数据保存在用户的终端设备, 较之于传统的集中式存储与训练模式, 实现了从根源上保护用户隐私的目的, 因此得到了众多推荐系统领域研究学者们的广泛关注. 基于此, 对近年来基于联邦学习范式的隐私保护推荐算法进行全面综述、系统分类与深度分析. 具体的, 首先综述经典的推荐算法以及所面临的问题, 然后介绍基于隐私保护的推荐系统与目前存在的挑战, 随后从多个维度综述结合联邦学习技术的推荐算法, 最后对该方向做出系统性的总结并对未来研究方向与发展趋势进行展望.
推荐系统通过集中式的存储与训练用户对物品的海量行为信息以及内容特征, 旨在为用户提供个性化的信息服务与决策支持. 然而, 海量数据背后存在大量的用户个人信息以及敏感数据, 因此如何在保证用户隐私与数据安全的前提下分析用户行为模式成为了近年来研究的热点. 联邦学习作为新兴的隐私保护范式, 能够协调多个参与方通过模型参数或者梯度等信息共同学习无损的全局共享模型, 同时保证所有的原始数据保存在用户的终端设备, 较之于传统的集中式存储与训练模式, 实现了从根源上保护用户隐私的目的, 因此得到了众多推荐系统领域研究学者们的广泛关注. 基于此, 对近年来基于联邦学习范式的隐私保护推荐算法进行全面综述、系统分类与深度分析. 具体的, 首先综述经典的推荐算法以及所面临的问题, 然后介绍基于隐私保护的推荐系统与目前存在的挑战, 随后从多个维度综述结合联邦学习技术的推荐算法, 最后对该方向做出系统性的总结并对未来研究方向与发展趋势进行展望.



2022, 48(9): 2164-2174.
doi: 10.16383/j.aas.c211008
摘要:
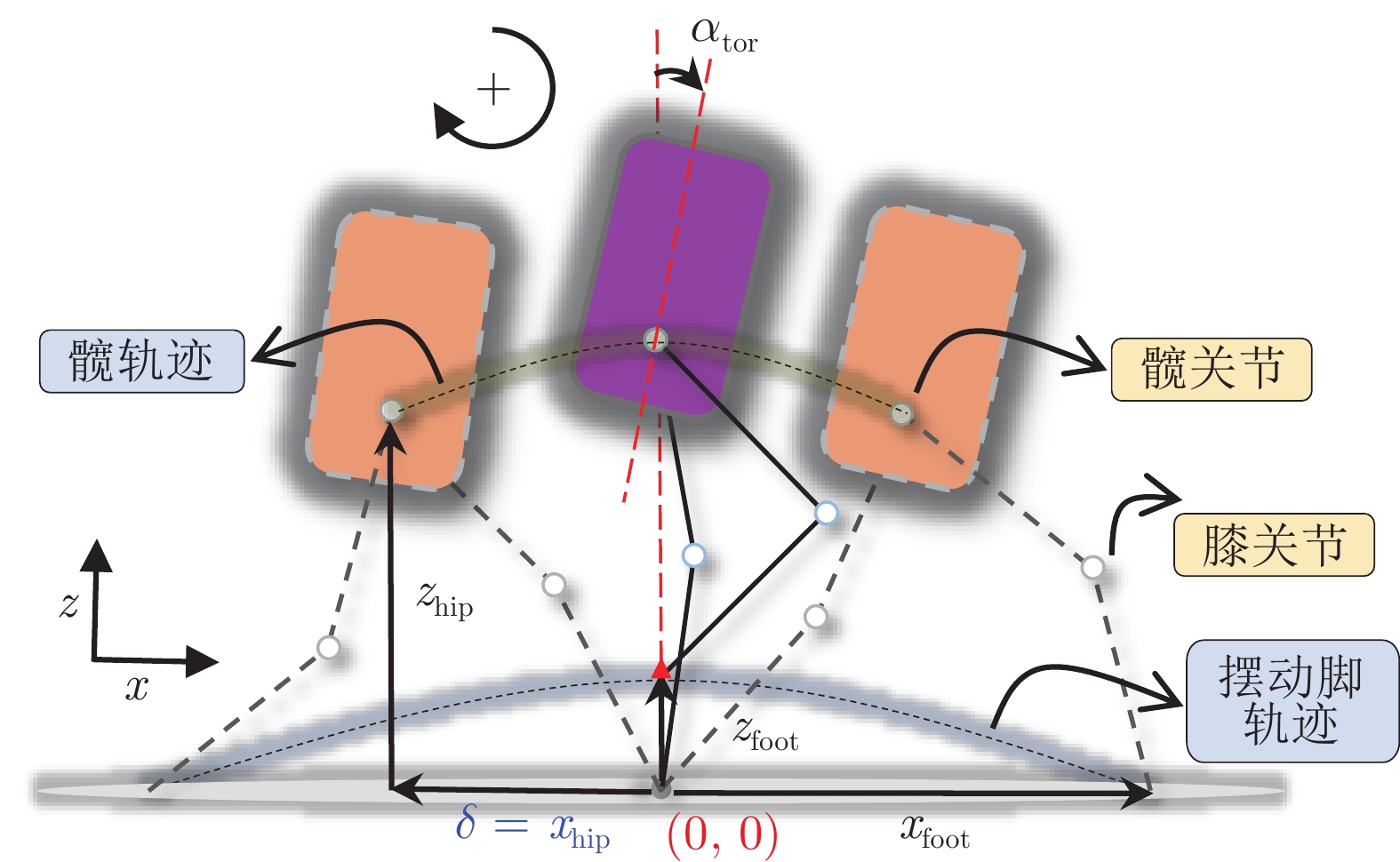
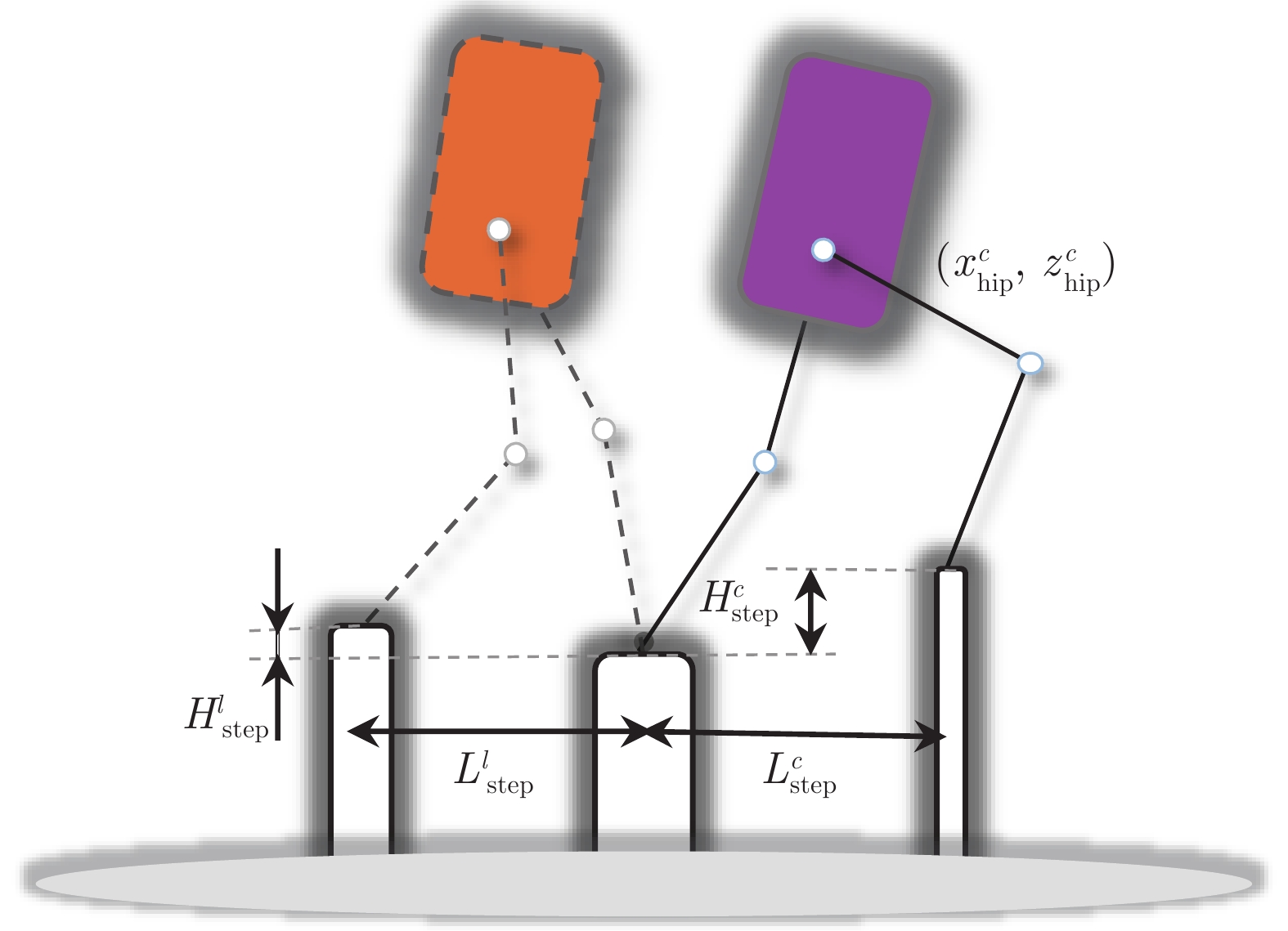
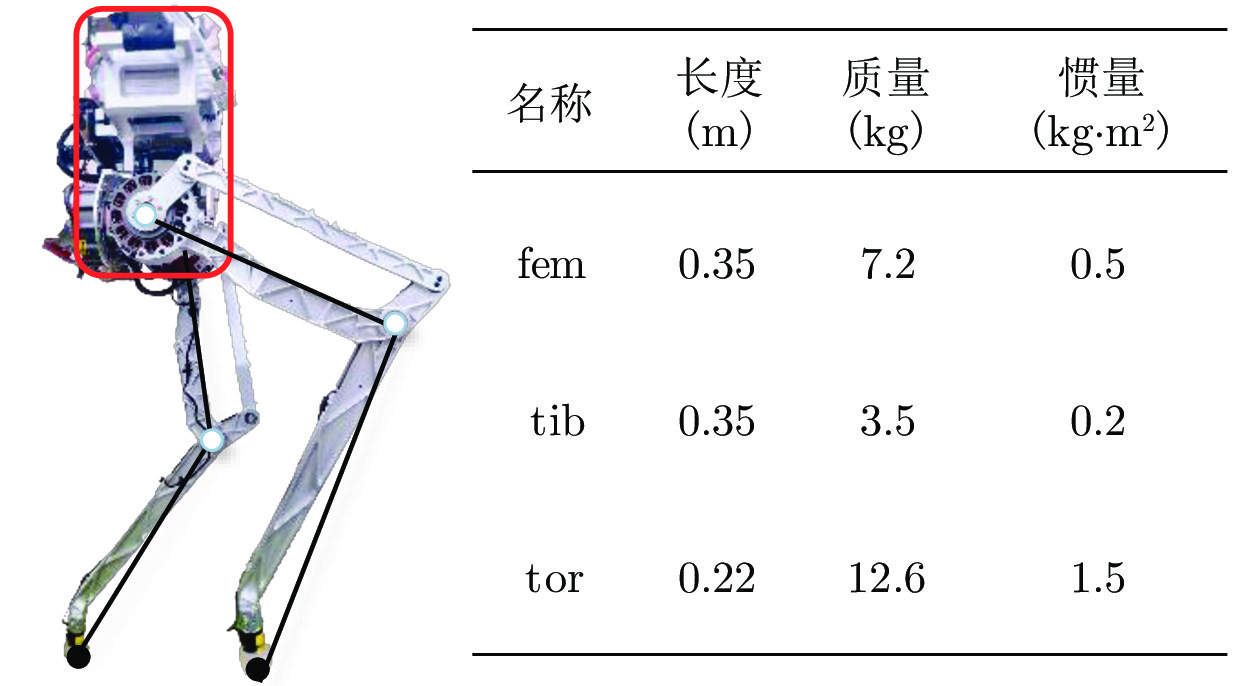
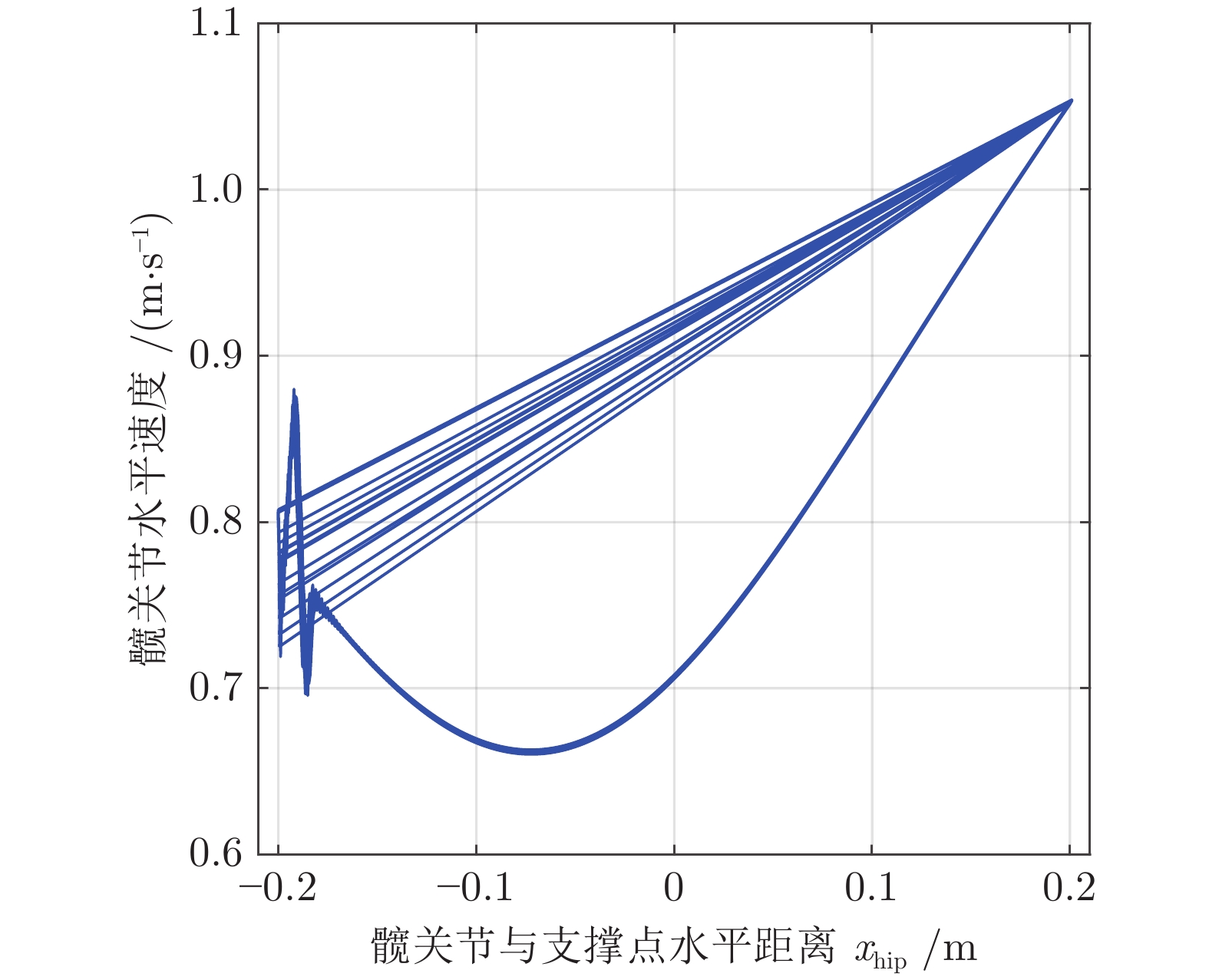
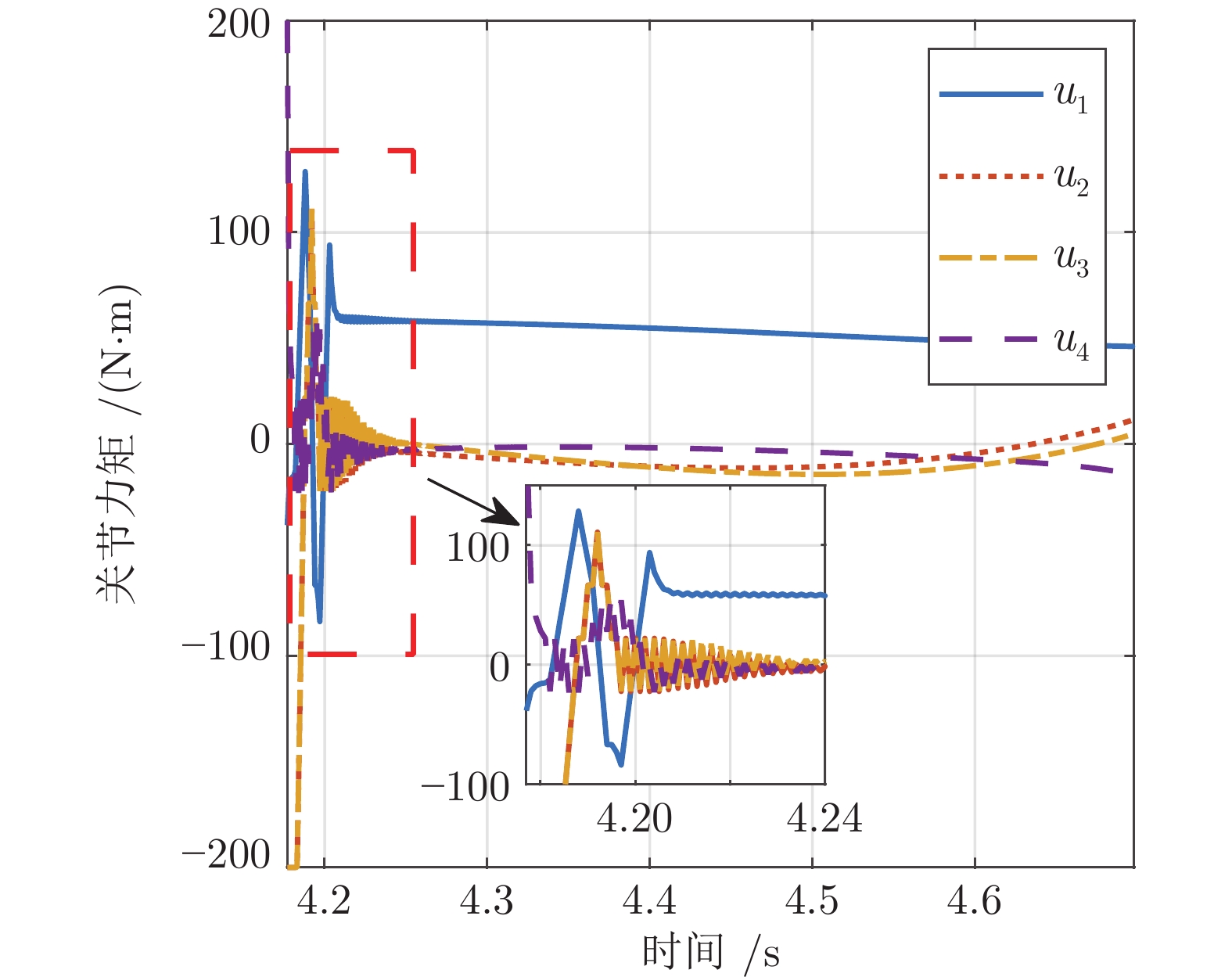
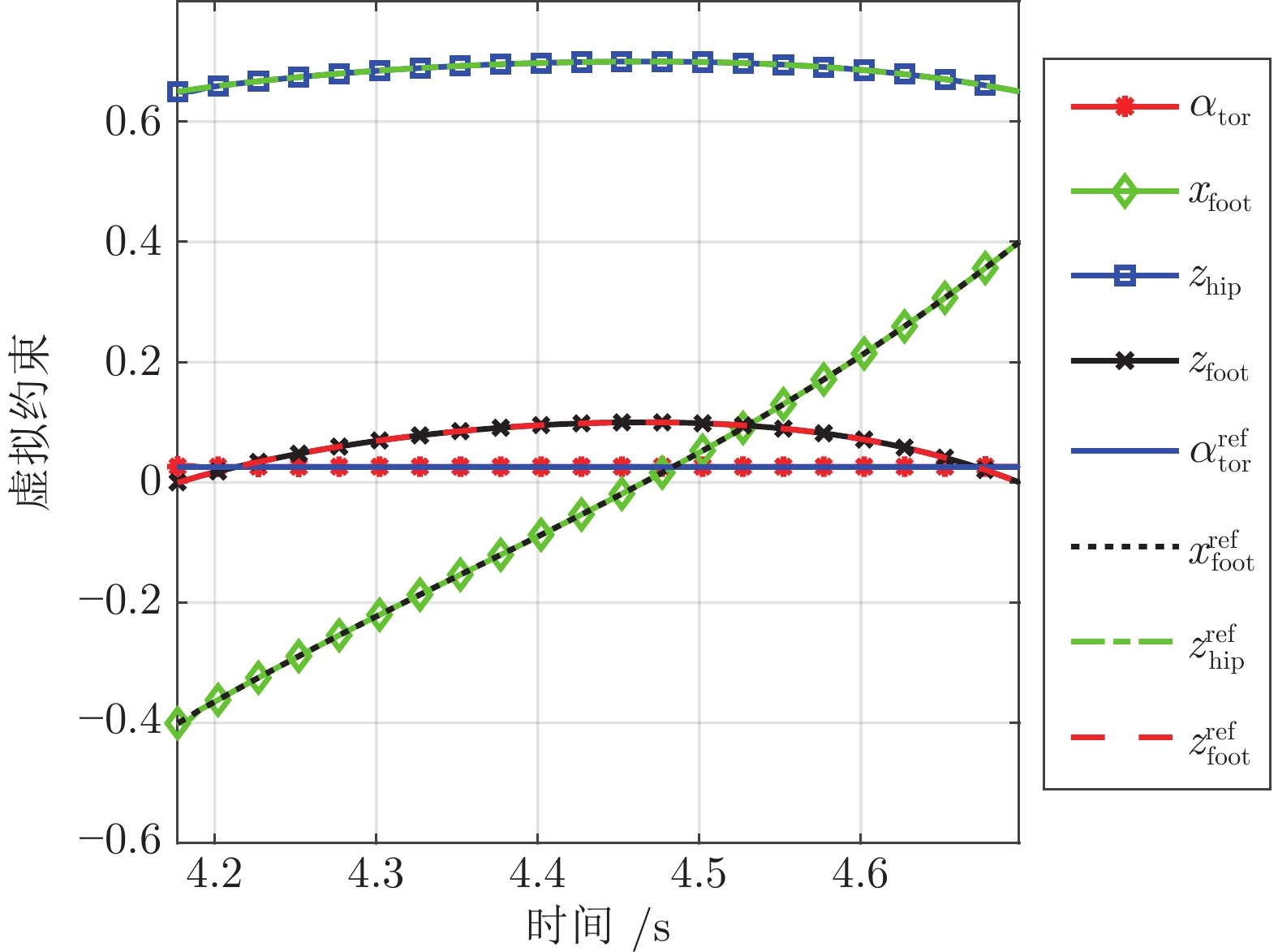
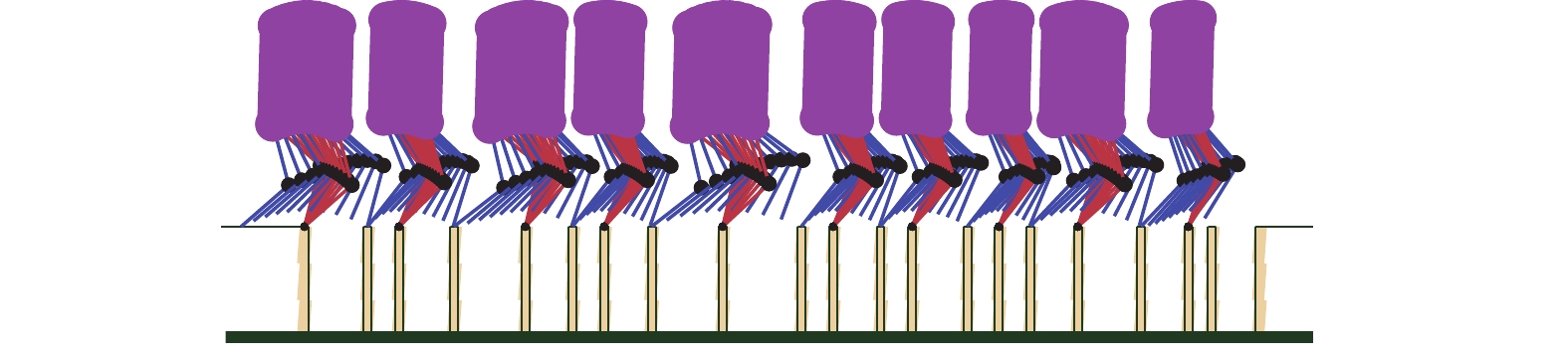
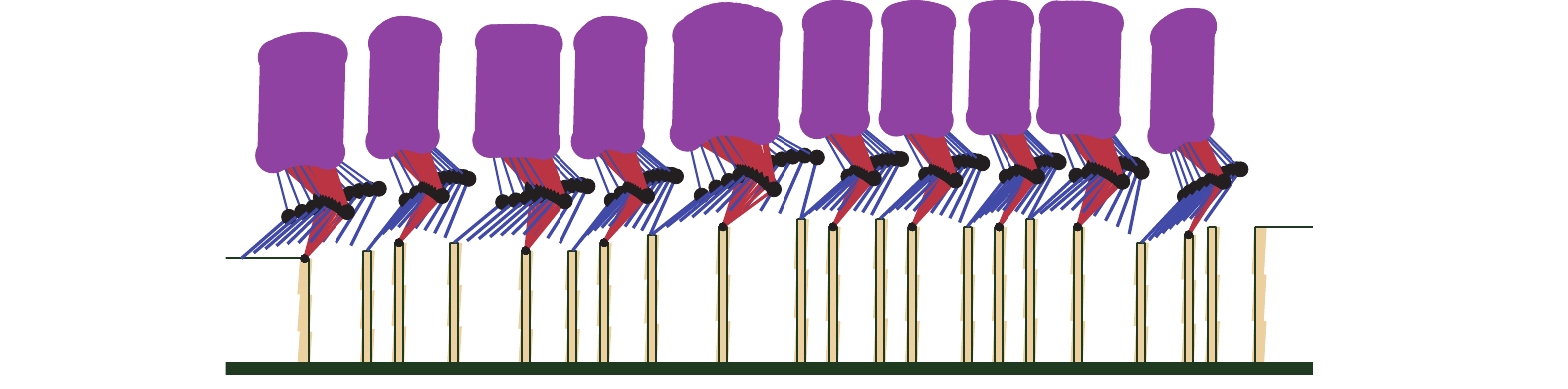
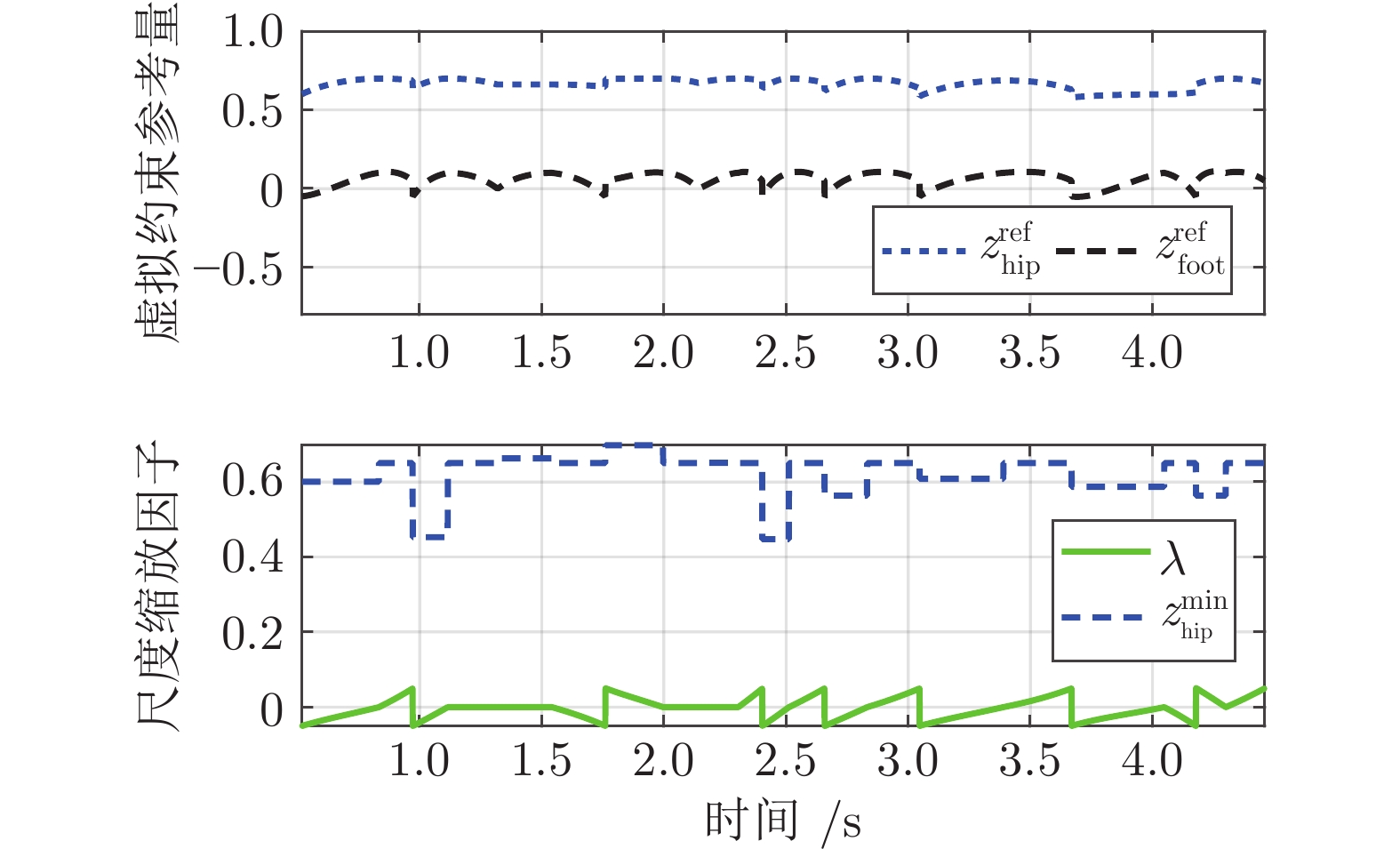
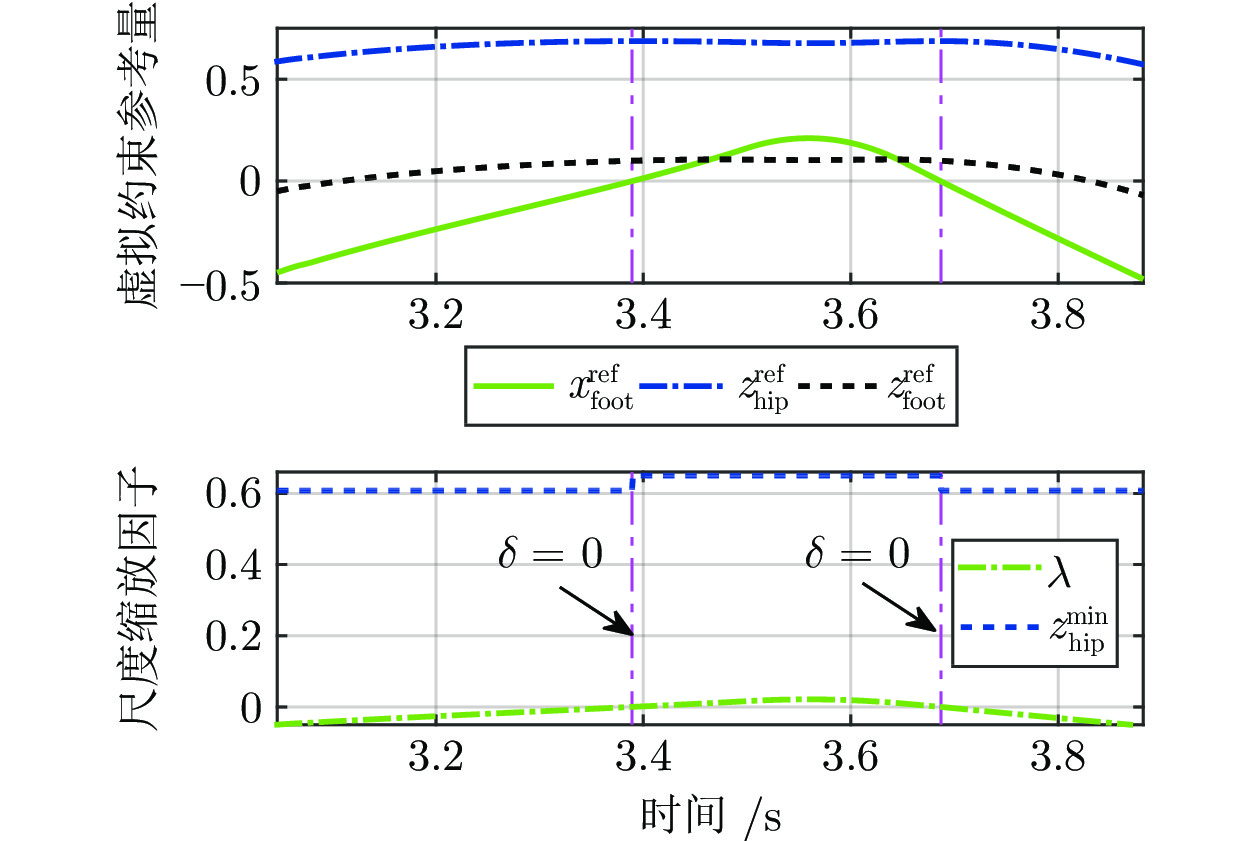
欠驱动双足机器人在行走中为保持自身的平衡, 双脚需要不间断运动. 但在仅有特定立足点的离散地形上很难实现调整后的落脚点, 从而导致欠驱动双足机器人在复杂环境中的适应能力下降. 提出了基于虚拟约束(Virtual constraint, VC)的变步长调节与控制方法, 根据欠驱动双足机器人当前状态与参考落脚点设计了非时变尺度缩放因子, 能够实时重构适应当前环境的步态轨迹; 同时构建了全身动力学模型, 采用反馈线性化的模型预测控制 (Model predictive control, MPC) 滚动优化产生力矩控制量, 实现准确的轨迹跟踪控制. 最终进行了欠驱动双足机器人的随机离散地形稳定行走的仿真实验, 验证了所提方法的有效性与鲁棒性.
欠驱动双足机器人在行走中为保持自身的平衡, 双脚需要不间断运动. 但在仅有特定立足点的离散地形上很难实现调整后的落脚点, 从而导致欠驱动双足机器人在复杂环境中的适应能力下降. 提出了基于虚拟约束(Virtual constraint, VC)的变步长调节与控制方法, 根据欠驱动双足机器人当前状态与参考落脚点设计了非时变尺度缩放因子, 能够实时重构适应当前环境的步态轨迹; 同时构建了全身动力学模型, 采用反馈线性化的模型预测控制 (Model predictive control, MPC) 滚动优化产生力矩控制量, 实现准确的轨迹跟踪控制. 最终进行了欠驱动双足机器人的随机离散地形稳定行走的仿真实验, 验证了所提方法的有效性与鲁棒性.








2022, 48(9): 2175-2186.
doi: 10.16383/j.aas.c200535
摘要:
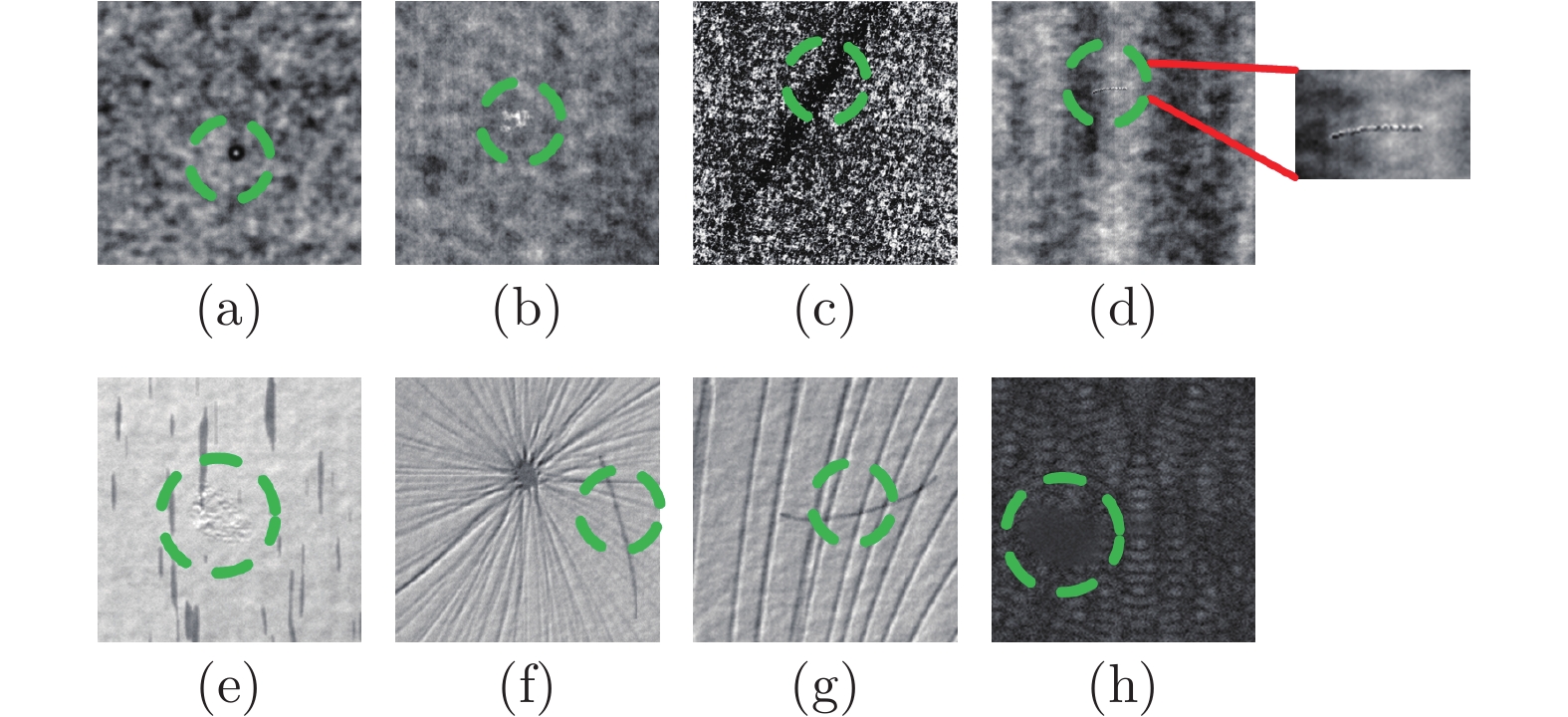
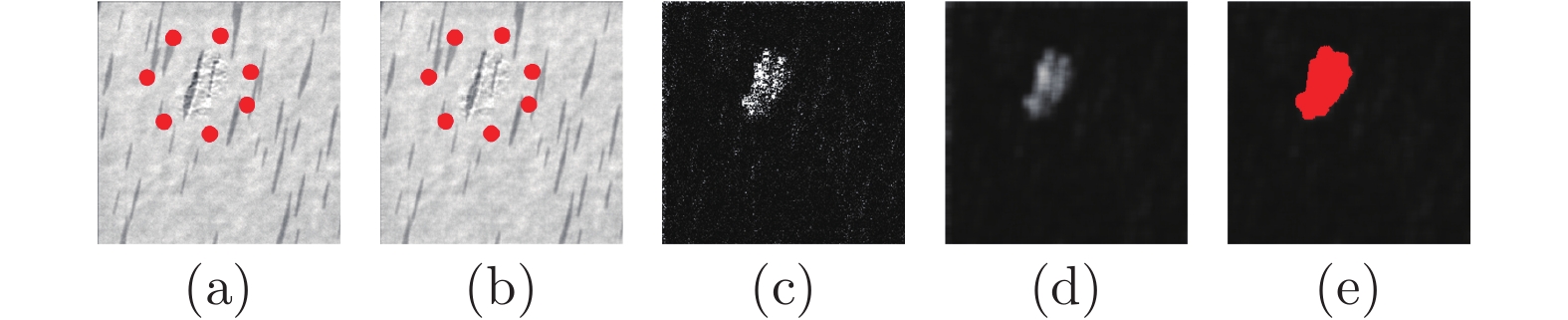
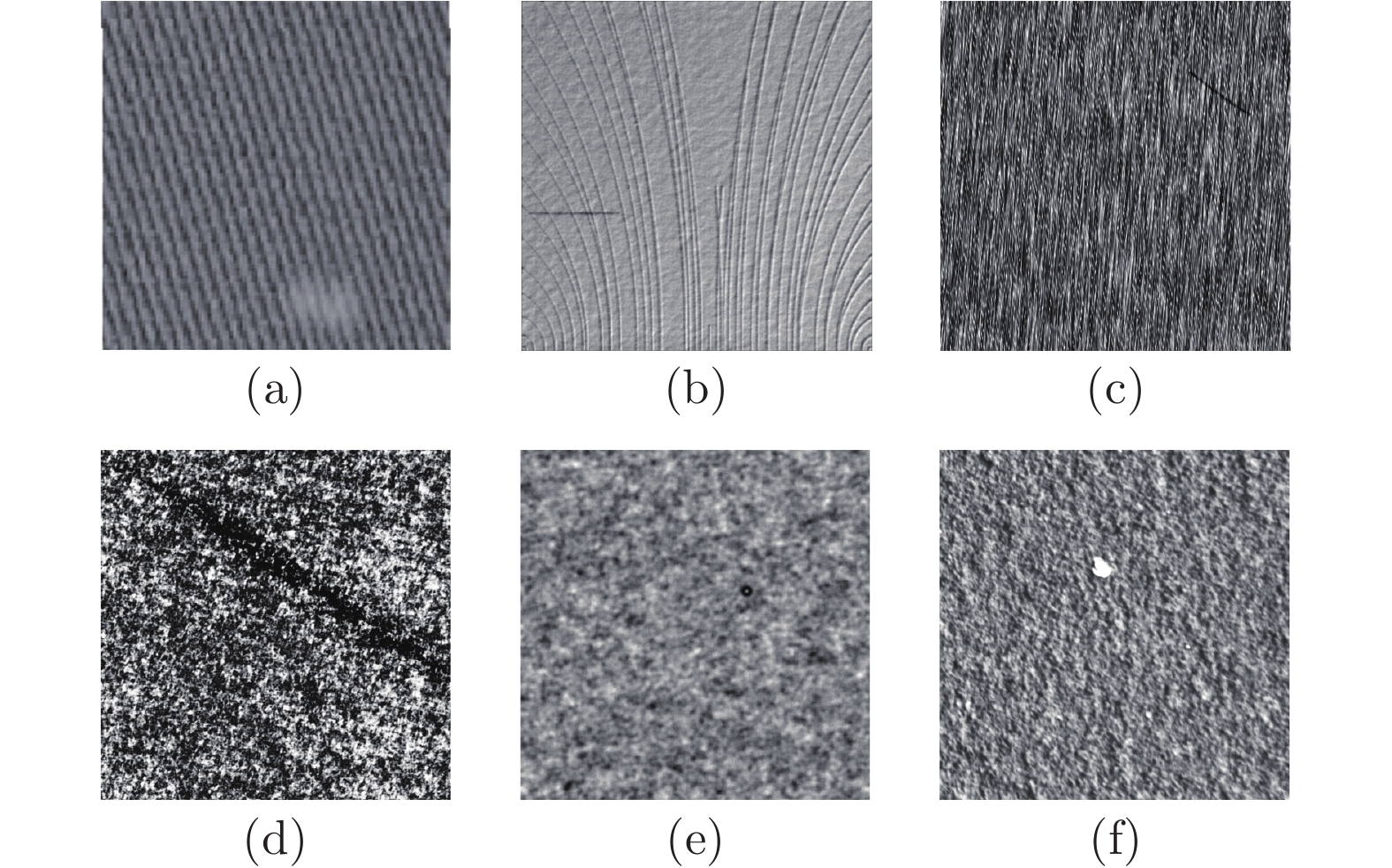
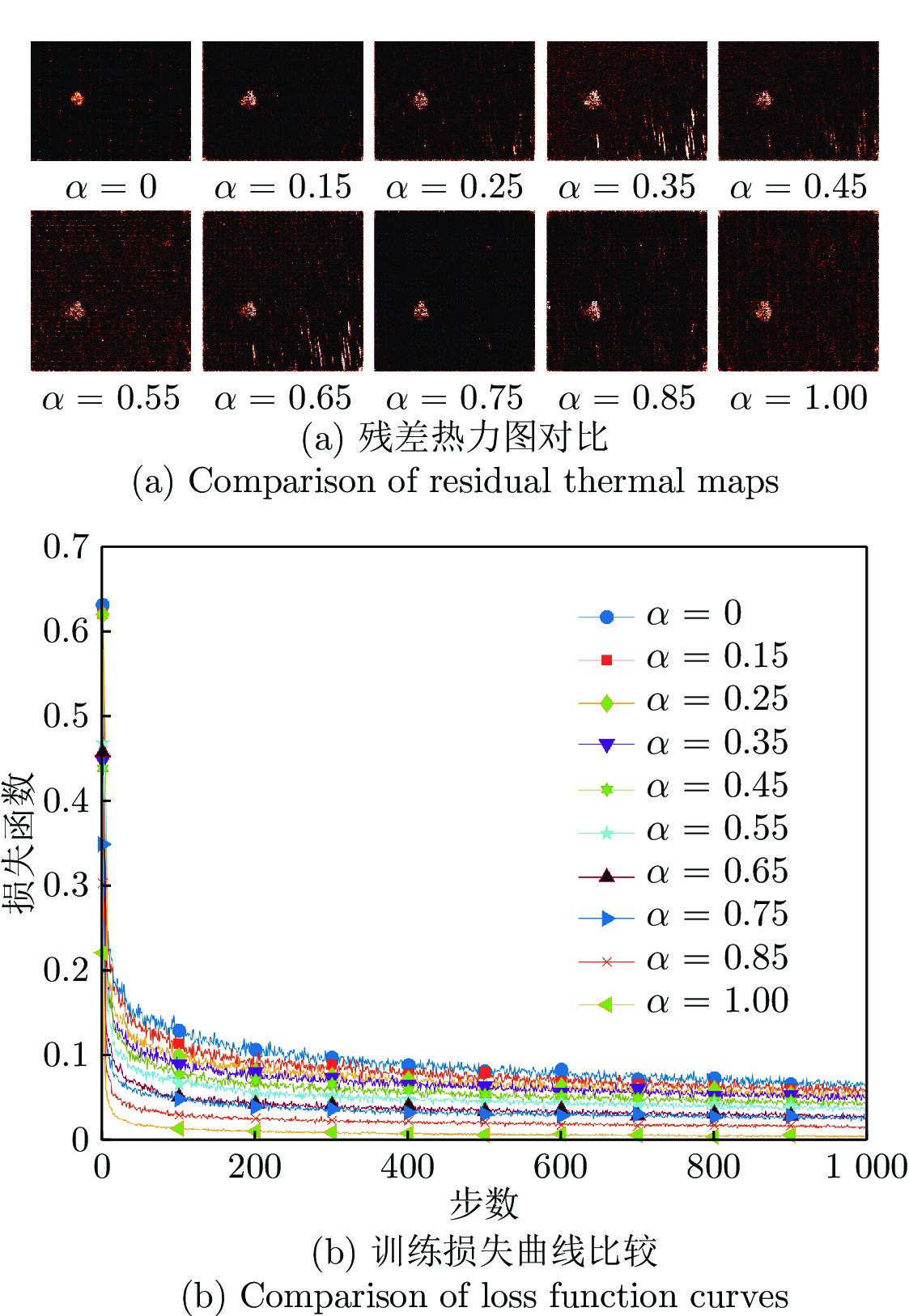
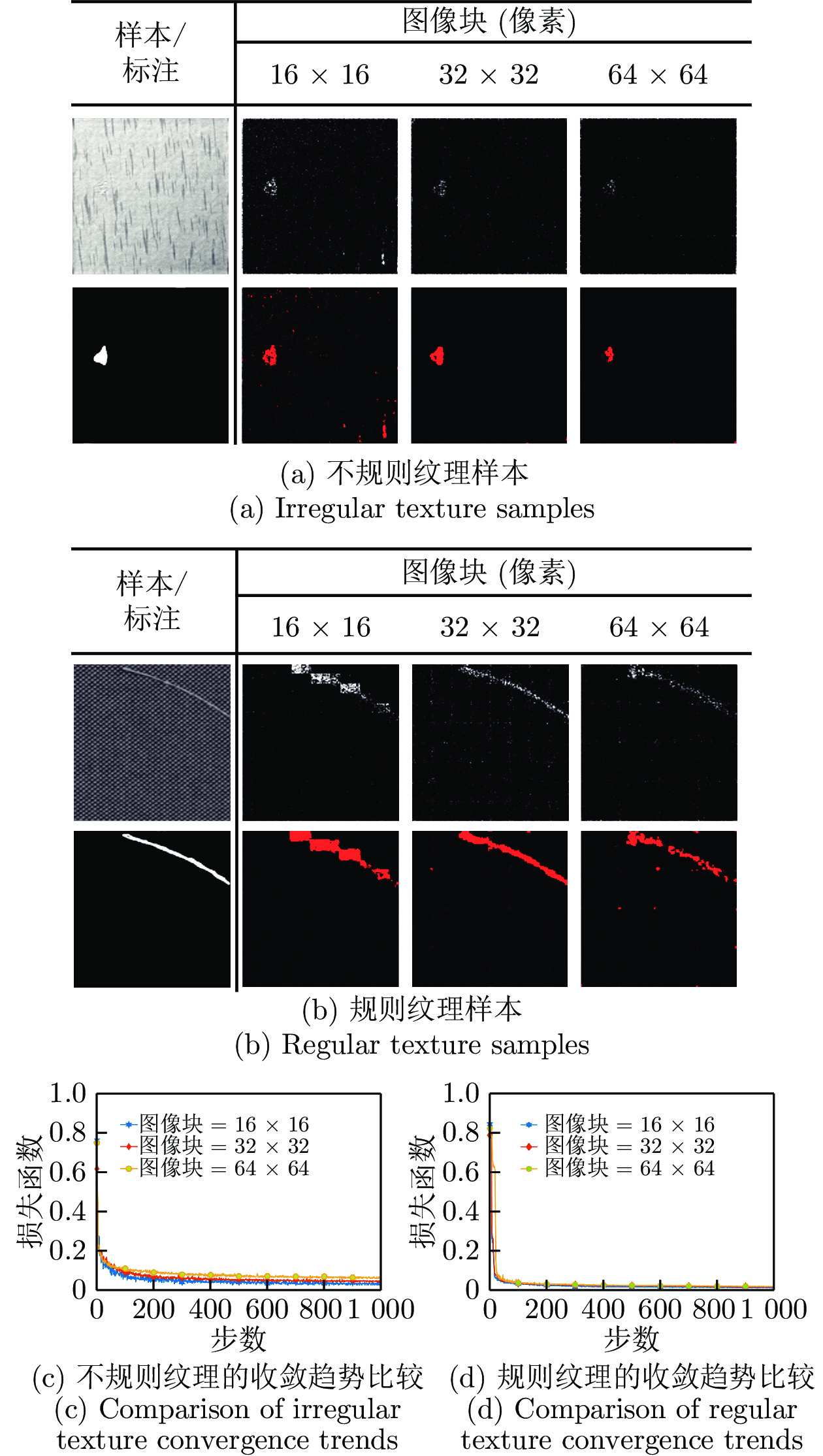
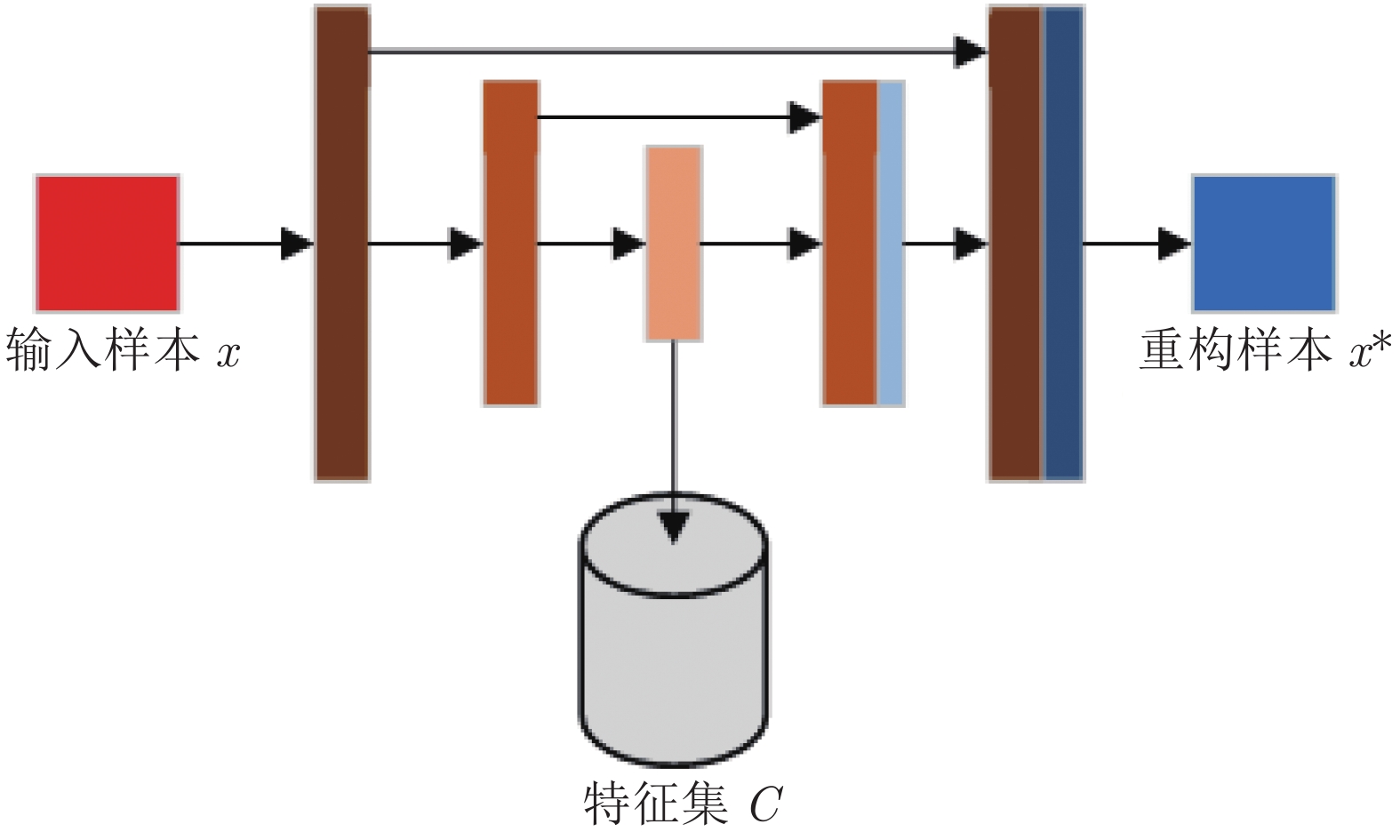
基于深度学习的方法在某些工业产品的表面缺陷识别和分类方面表现出优异的性能, 然而大多数工业产品缺陷样本稀缺, 而且特征差异大, 导致这类需要大量缺陷样本训练的检测方法难以适用. 提出一种基于重构网络的无监督缺陷检测算法, 仅使用容易大量获得的无缺陷样本数据实现对异常缺陷的检测. 提出的算法包括两个阶段: 图像重构网络训练阶段和表面缺陷区域检测阶段. 训练阶段通过一种轻量化结构的全卷积自编码器设计重构网络, 仅使用少量正常样本进行训练, 使得重构网络能够生成无缺陷重构图像, 进一步提出一种结合结构性损失和L1损失的函数作为重构网络的损失函数, 解决自编码器检测算法对不规则纹理表面缺陷检测效果较差的问题; 缺陷检测阶段以重构图像与待测图像的残差作为缺陷的可能区域, 通过常规图像操作即可实现缺陷的定位. 对所提出的重构网络的无监督缺陷检测算法的网络结构、训练像素块大小、损失函数系数等影响因素进行了详细的实验分析, 并在多个缺陷图像样本集上与其他同类算法做了对比, 结果表明重构网络的无监督缺陷检测算法有较强的鲁棒性和准确性. 由于重构网络的无监督缺陷检测算法的轻量化结构, 检测1024 × 1024像素图像仅仅耗时2.82 ms, 适合工业在线检测.
基于深度学习的方法在某些工业产品的表面缺陷识别和分类方面表现出优异的性能, 然而大多数工业产品缺陷样本稀缺, 而且特征差异大, 导致这类需要大量缺陷样本训练的检测方法难以适用. 提出一种基于重构网络的无监督缺陷检测算法, 仅使用容易大量获得的无缺陷样本数据实现对异常缺陷的检测. 提出的算法包括两个阶段: 图像重构网络训练阶段和表面缺陷区域检测阶段. 训练阶段通过一种轻量化结构的全卷积自编码器设计重构网络, 仅使用少量正常样本进行训练, 使得重构网络能够生成无缺陷重构图像, 进一步提出一种结合结构性损失和L1损失的函数作为重构网络的损失函数, 解决自编码器检测算法对不规则纹理表面缺陷检测效果较差的问题; 缺陷检测阶段以重构图像与待测图像的残差作为缺陷的可能区域, 通过常规图像操作即可实现缺陷的定位. 对所提出的重构网络的无监督缺陷检测算法的网络结构、训练像素块大小、损失函数系数等影响因素进行了详细的实验分析, 并在多个缺陷图像样本集上与其他同类算法做了对比, 结果表明重构网络的无监督缺陷检测算法有较强的鲁棒性和准确性. 由于重构网络的无监督缺陷检测算法的轻量化结构, 检测1024 × 1024像素图像仅仅耗时2.82 ms, 适合工业在线检测.






2022, 48(9): 2187-2197.
doi: 10.16383/j.aas.c190817
摘要:
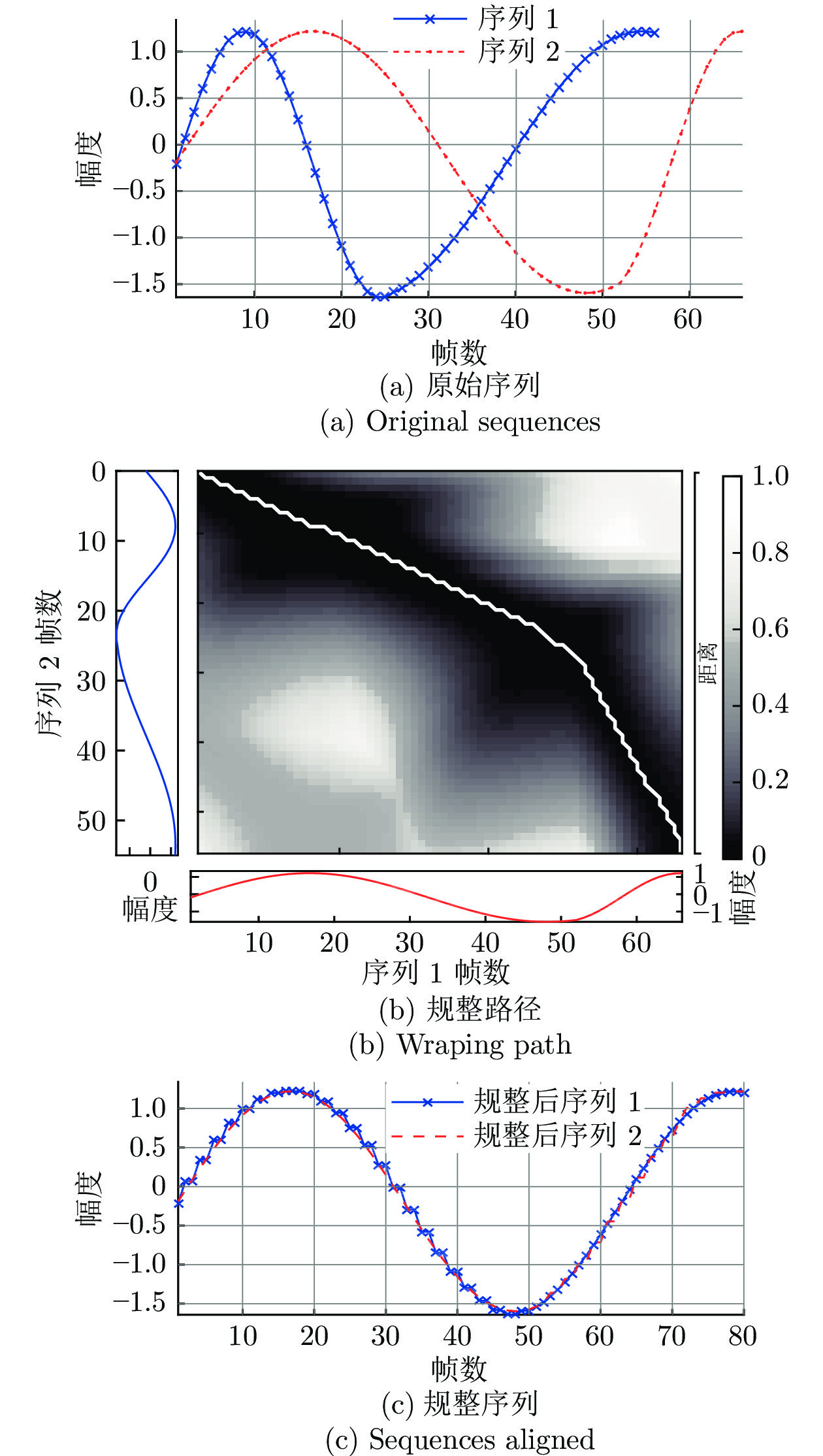
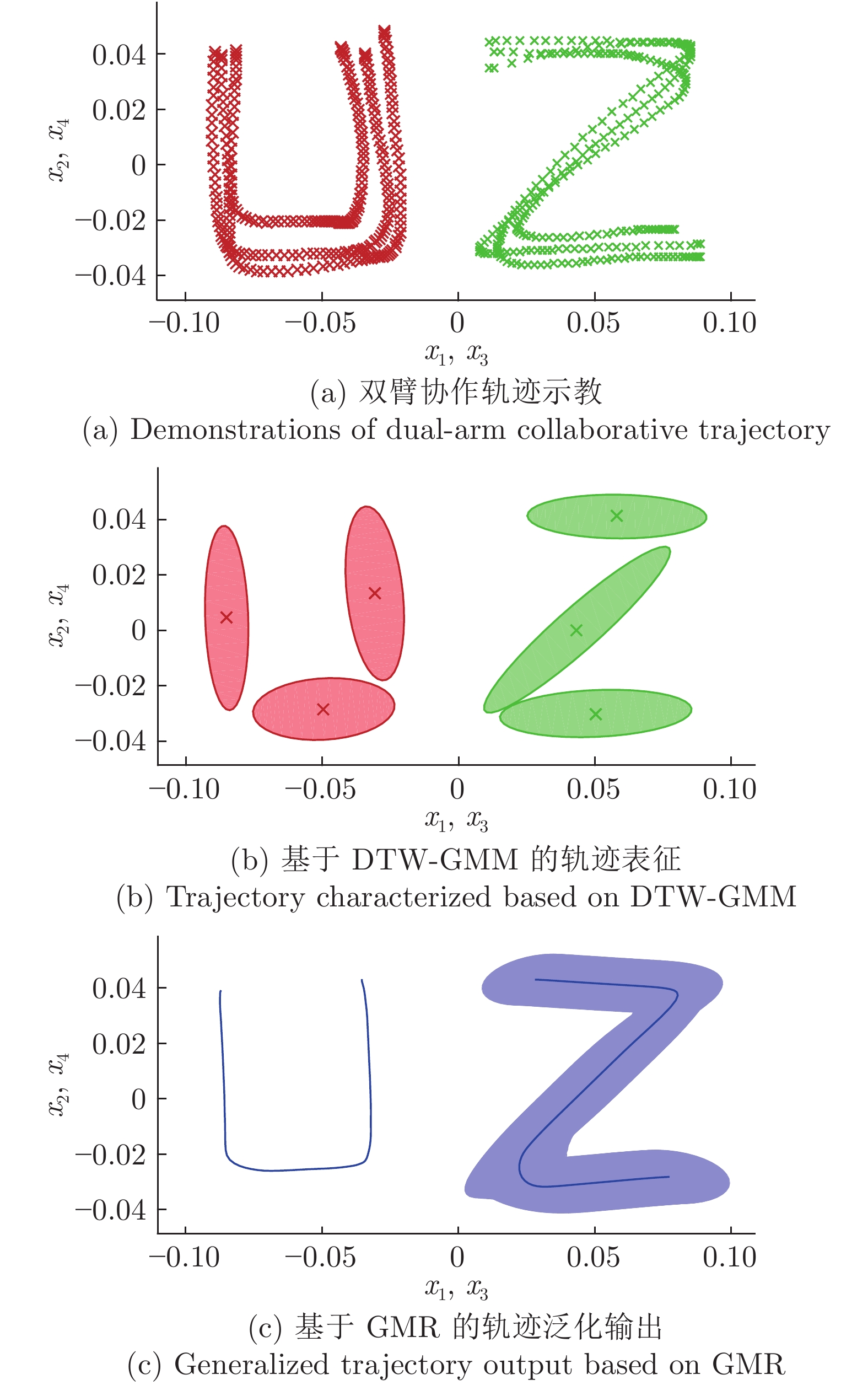
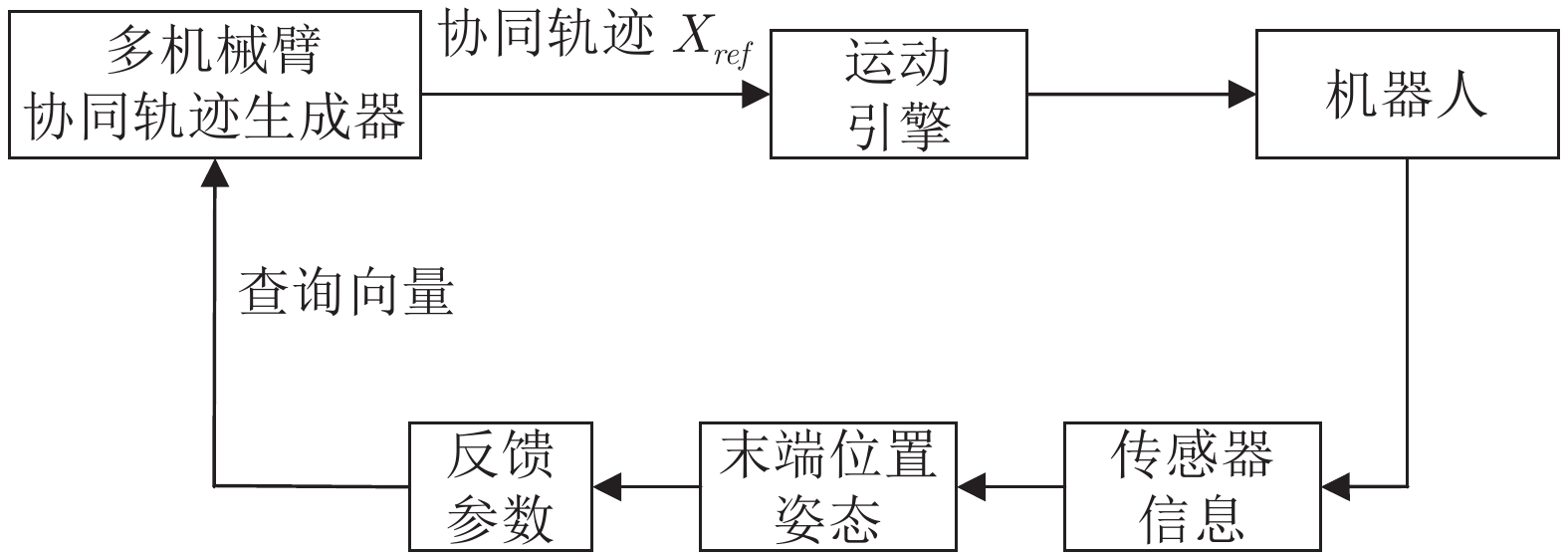
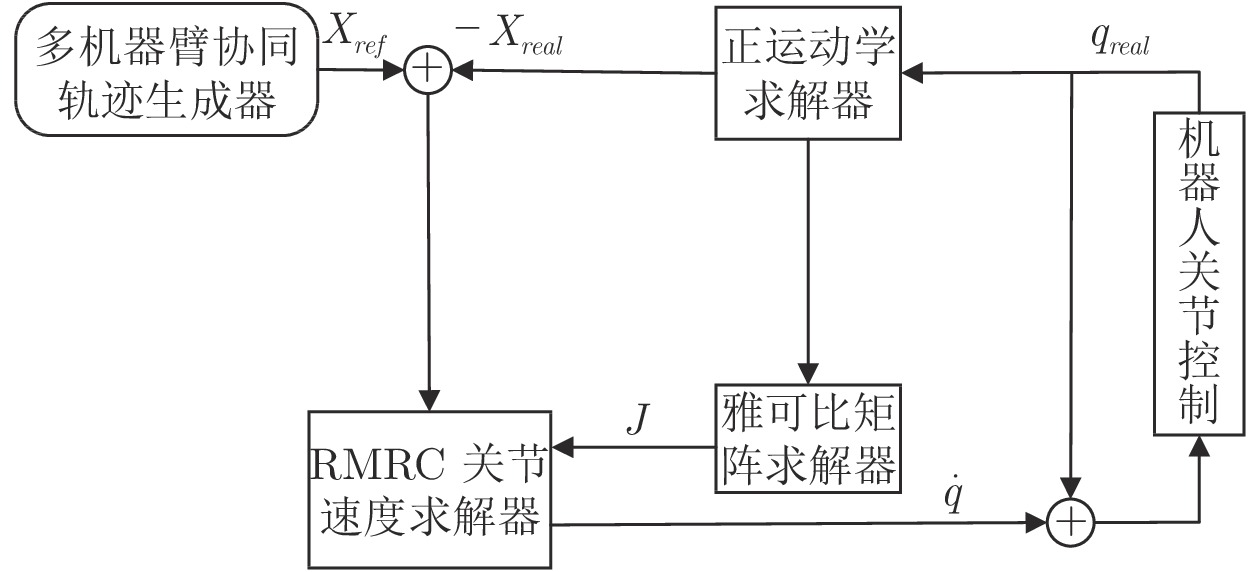
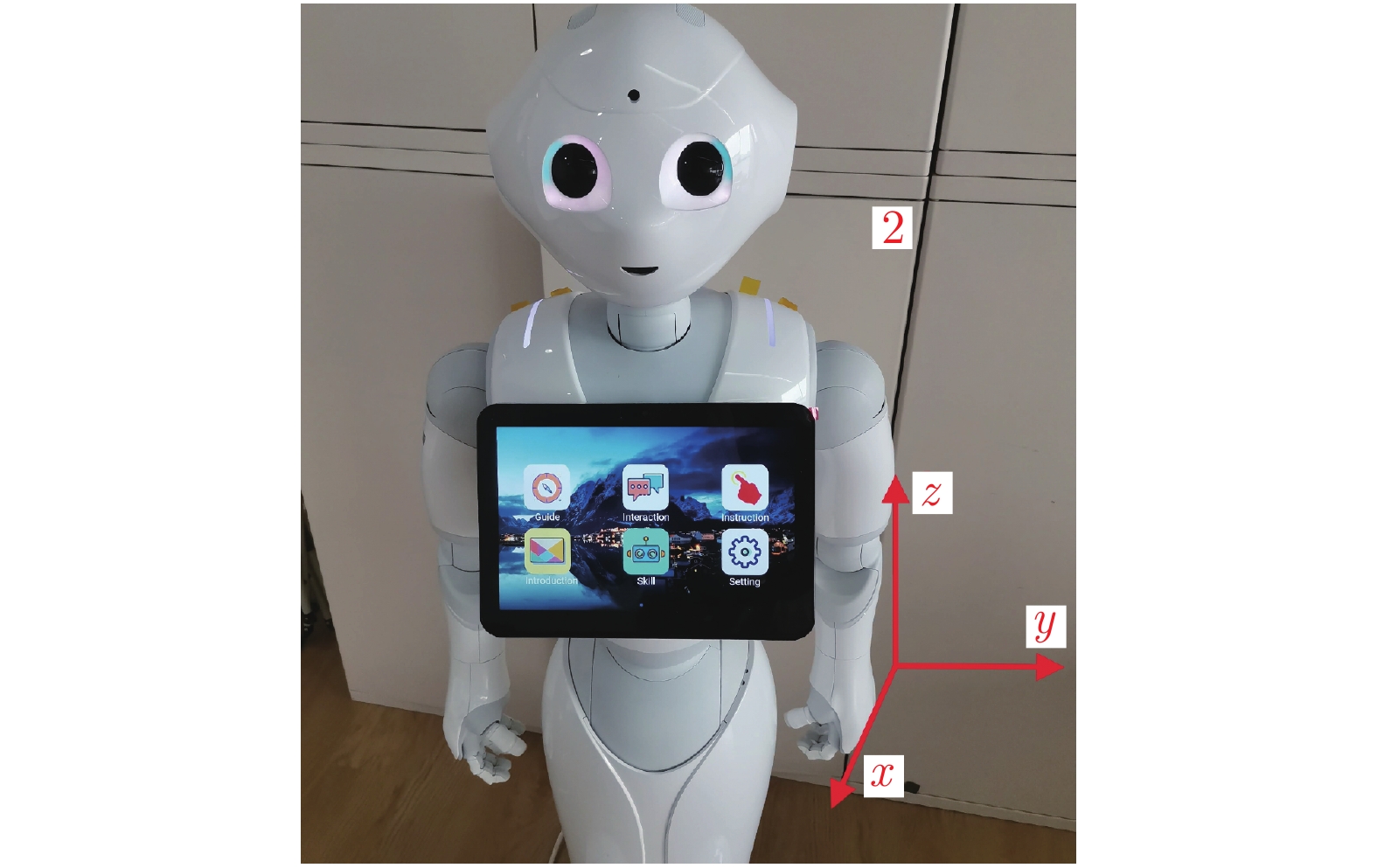
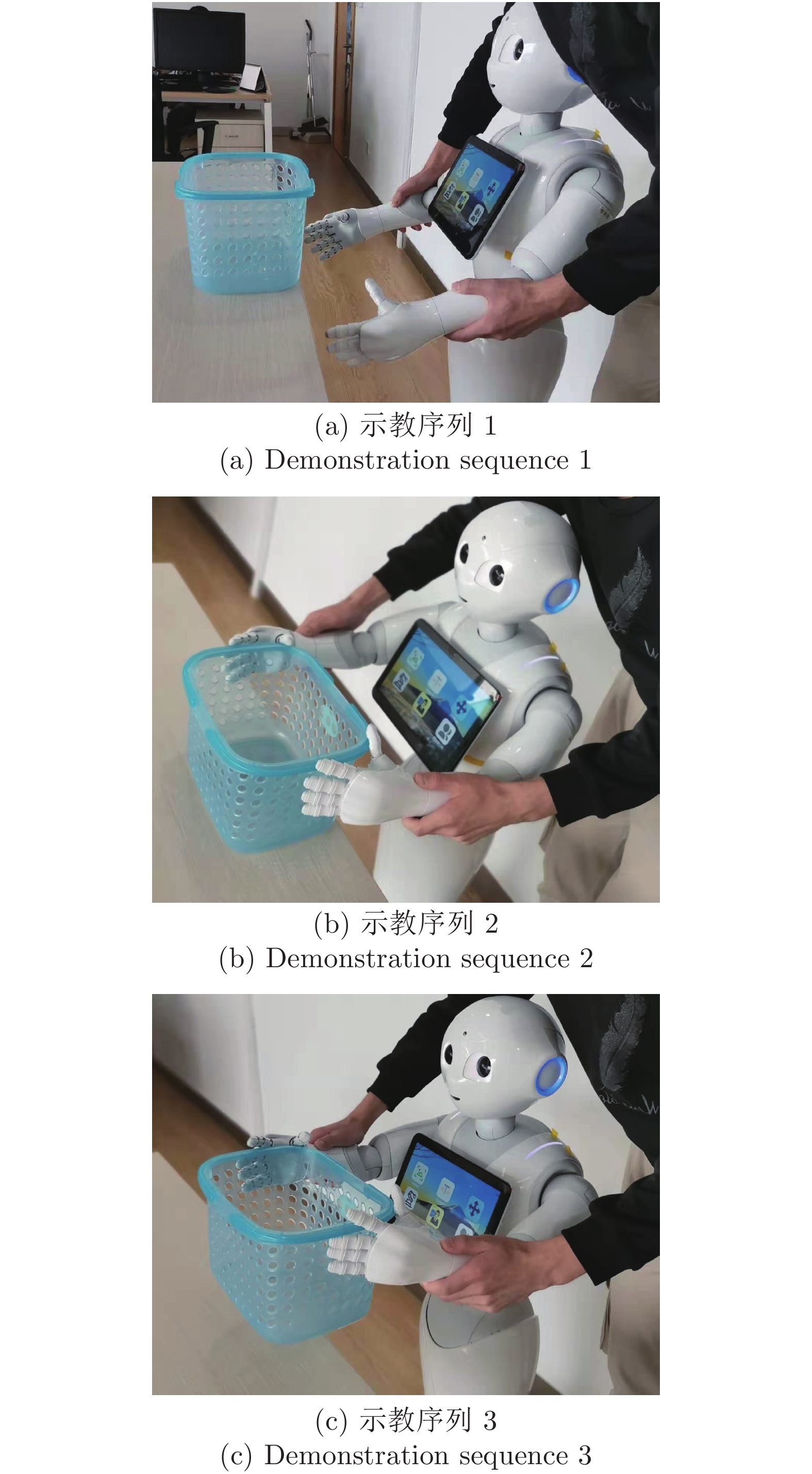
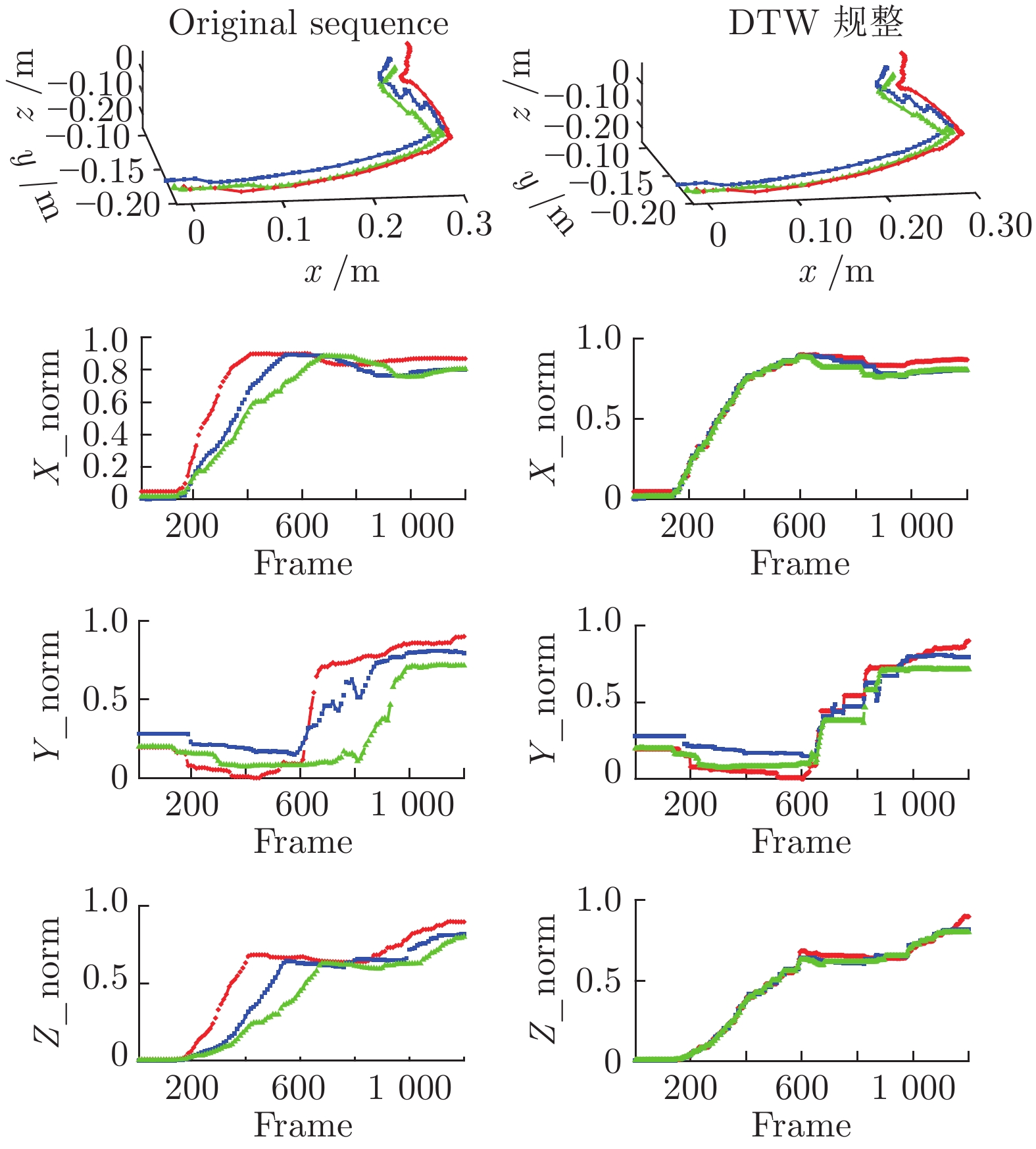
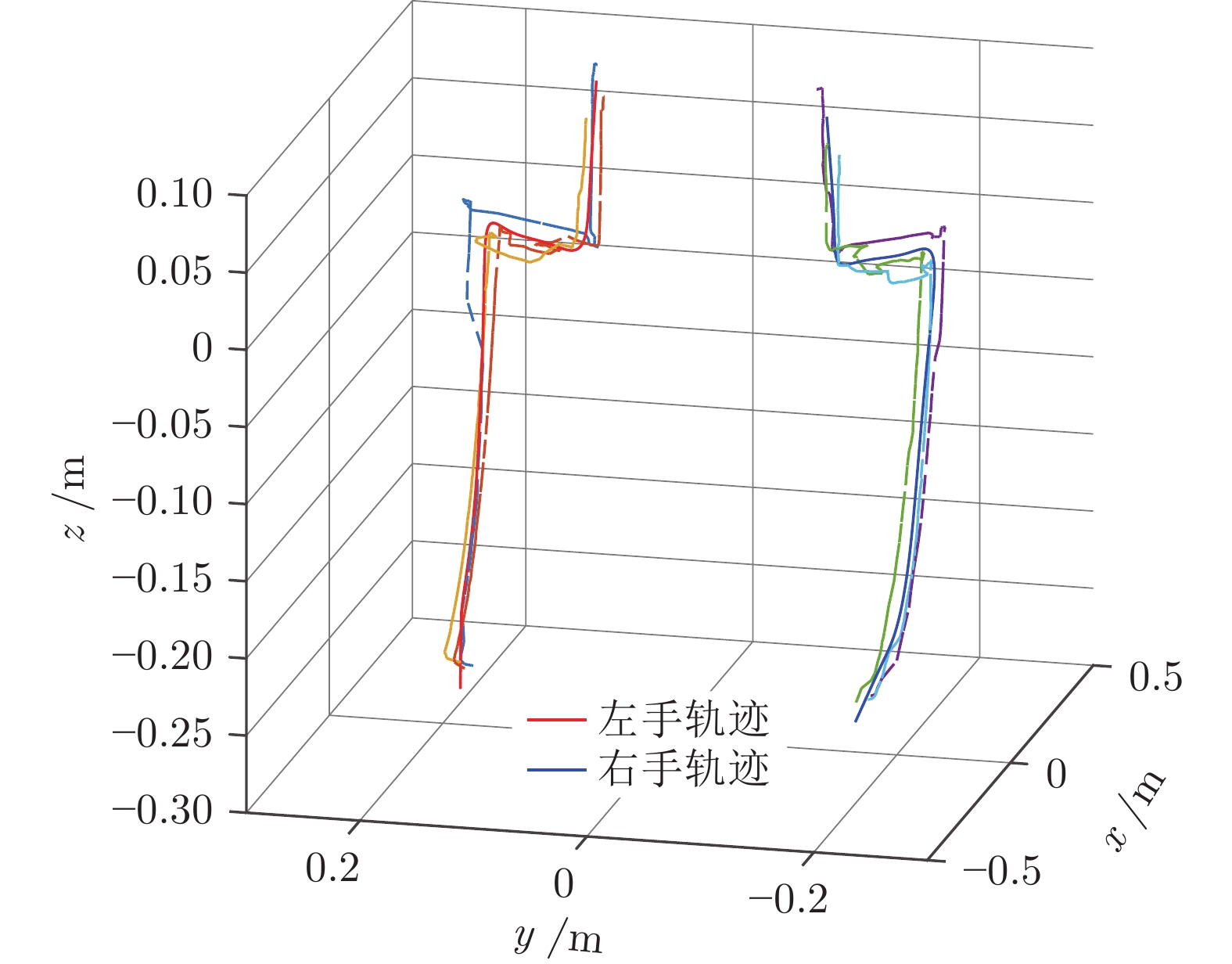
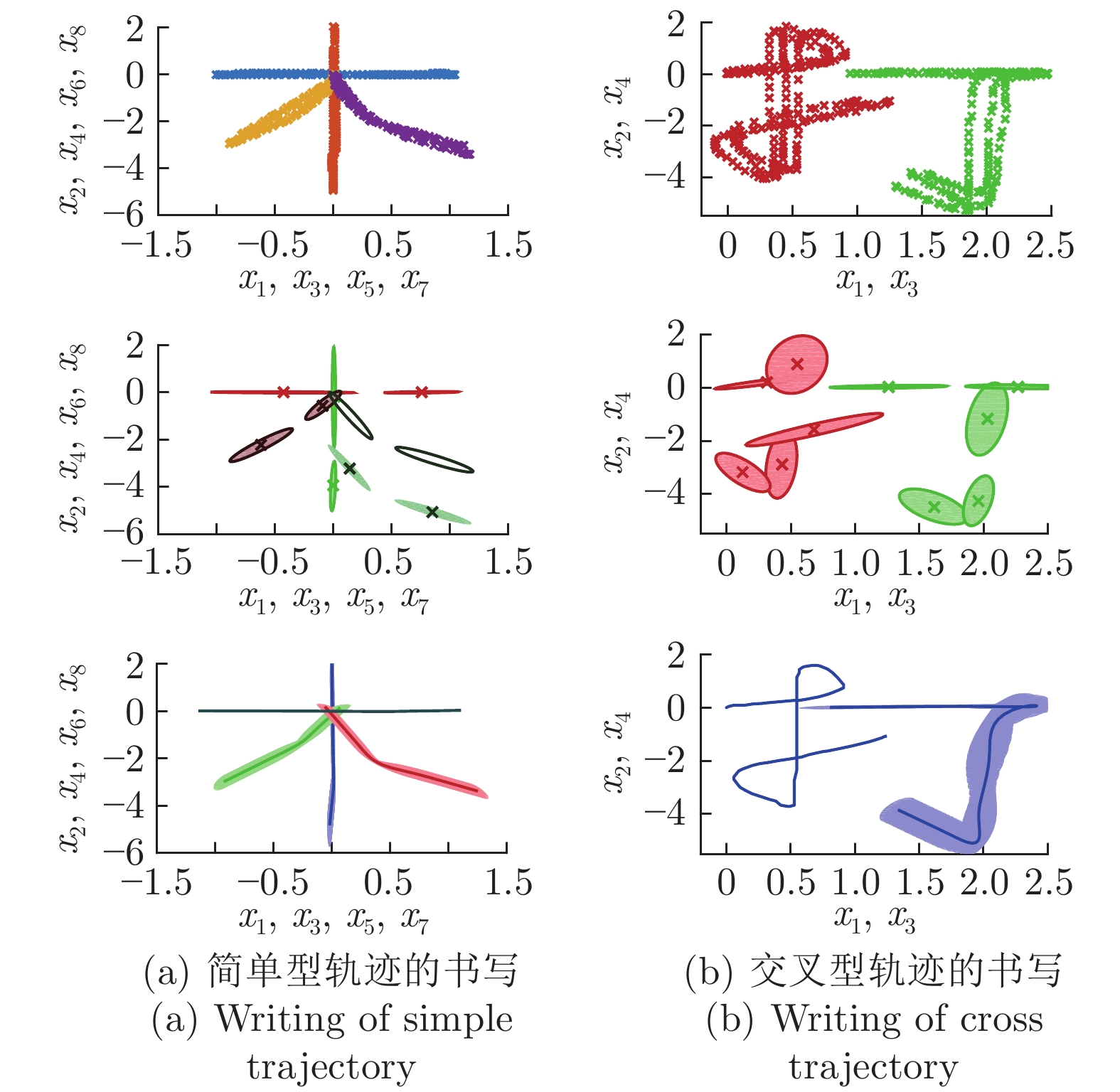
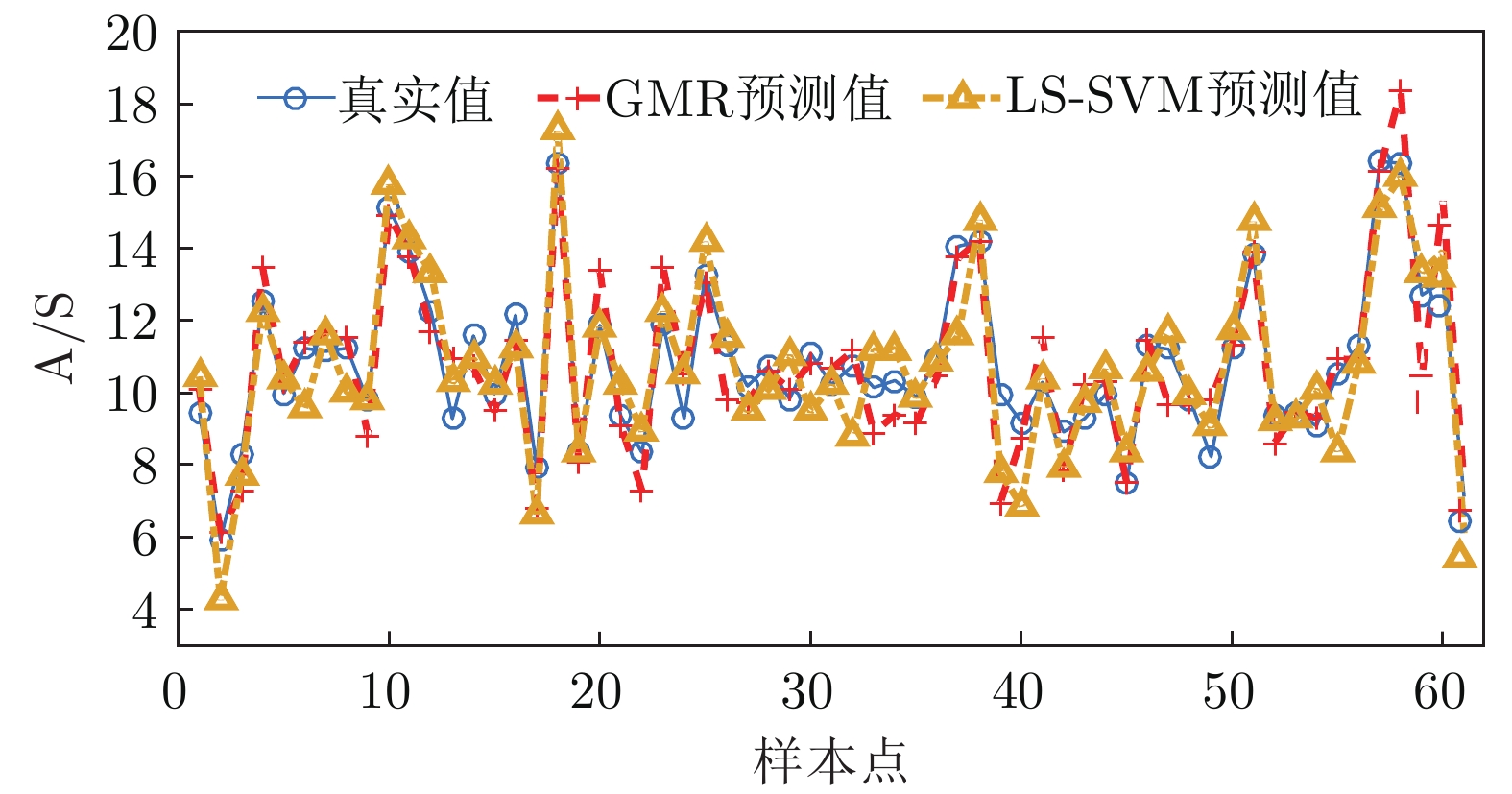
为了控制机器人完成复杂的多臂协作任务, 提出了一种基于动态时间规整−高斯混合模型(Dynamic time warping-Gaussian mixture model, DTW-GMM)的机器人多机械臂多任务协同策略. 首先, 针对机器人示教时轨迹时间长短往往存在较大差异的问题, 采用动态时间规整方法来统一时间的变化; 其次, 基于动态时间规整的多机械臂示教轨迹, 采用高斯混合模型对轨迹的特征进行提取, 并以某一机械臂的位置空间矢量作为查询向量, 基于高斯混合回归泛化输出其余机械臂的执行轨迹; 最后, 在Pepper仿人机器人平台上验证了所提出的多机械臂协同策略, 基于DTW-GMM算法控制机器人完成了双臂协作搬运任务和汉字轨迹的书写任务. 提出的基于DTW-GMM算法的多任务协同策略简单有效, 可以利用反馈信息实时协调各机械臂的任务, 在线生成平滑的协同轨迹, 控制机器人完成复杂的协作操作.
为了控制机器人完成复杂的多臂协作任务, 提出了一种基于动态时间规整−高斯混合模型(Dynamic time warping-Gaussian mixture model, DTW-GMM)的机器人多机械臂多任务协同策略. 首先, 针对机器人示教时轨迹时间长短往往存在较大差异的问题, 采用动态时间规整方法来统一时间的变化; 其次, 基于动态时间规整的多机械臂示教轨迹, 采用高斯混合模型对轨迹的特征进行提取, 并以某一机械臂的位置空间矢量作为查询向量, 基于高斯混合回归泛化输出其余机械臂的执行轨迹; 最后, 在Pepper仿人机器人平台上验证了所提出的多机械臂协同策略, 基于DTW-GMM算法控制机器人完成了双臂协作搬运任务和汉字轨迹的书写任务. 提出的基于DTW-GMM算法的多任务协同策略简单有效, 可以利用反馈信息实时协调各机械臂的任务, 在线生成平滑的协同轨迹, 控制机器人完成复杂的协作操作.





2022, 48(9): 2198-2211.
doi: 10.16383/j.aas.c200392
摘要:
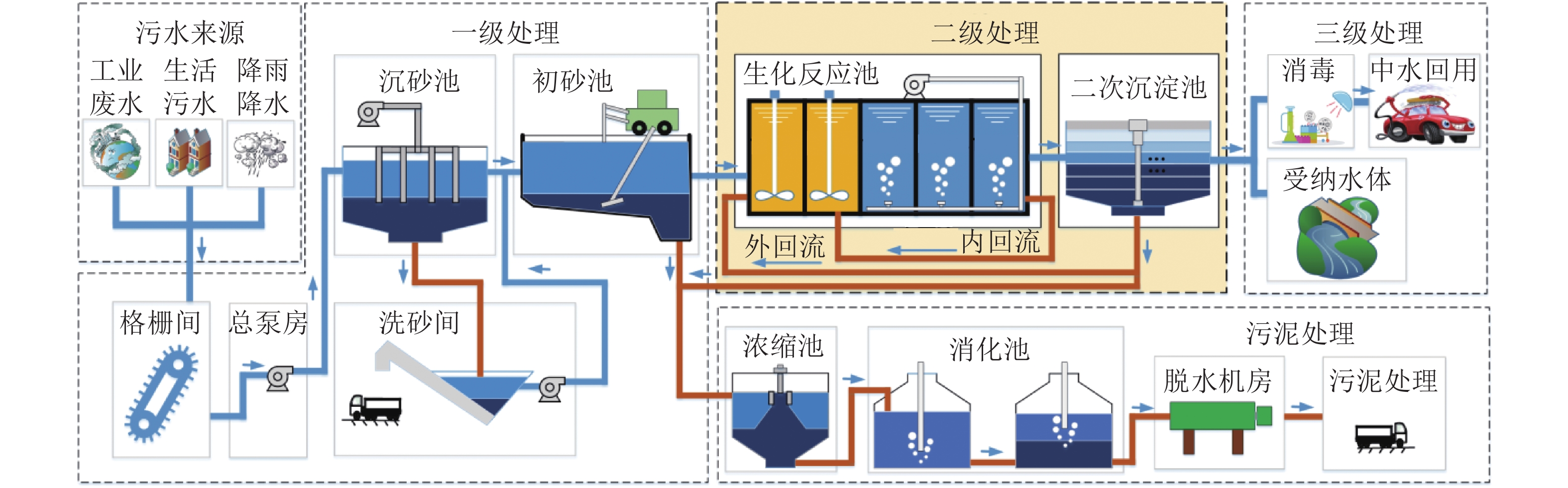
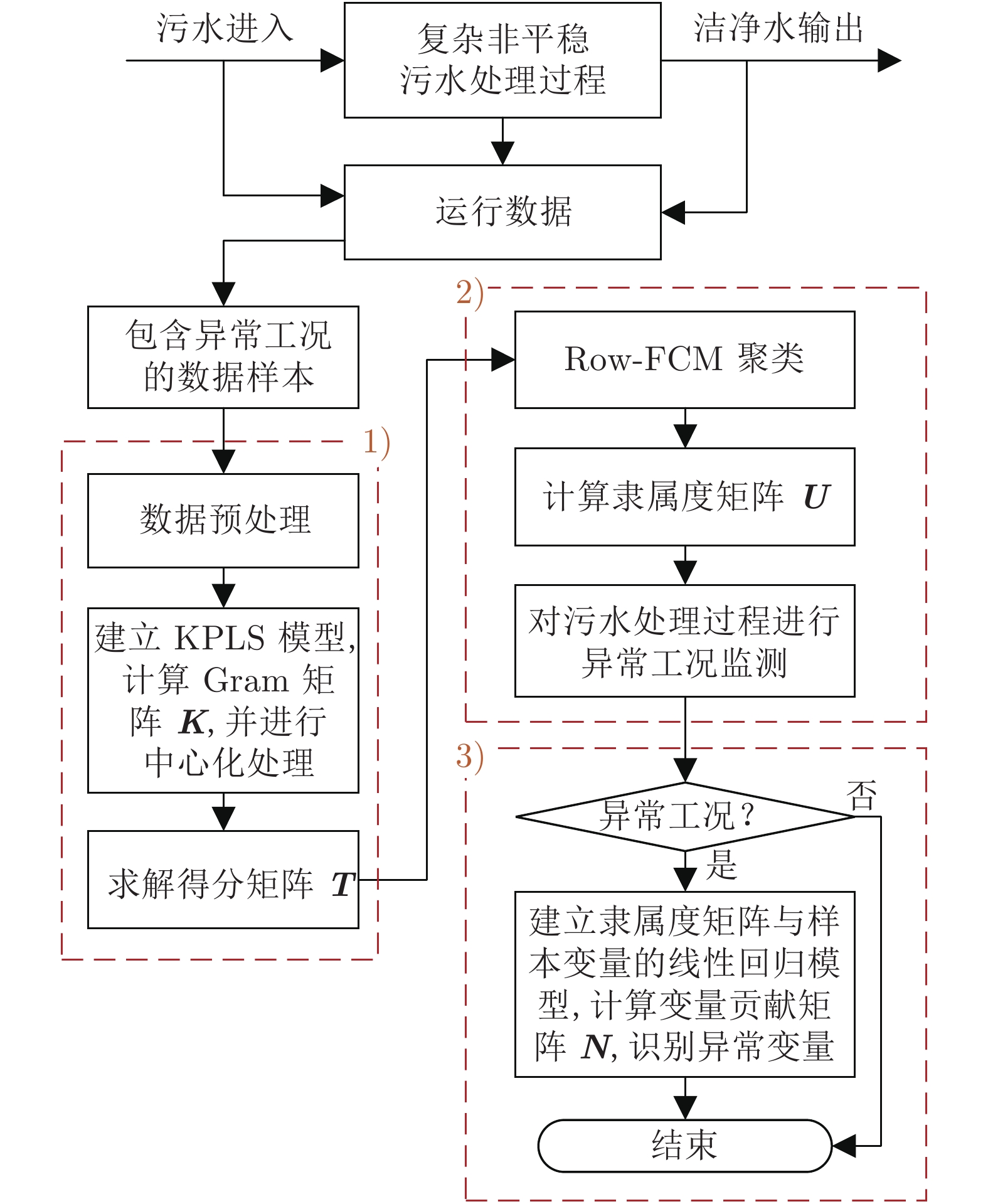
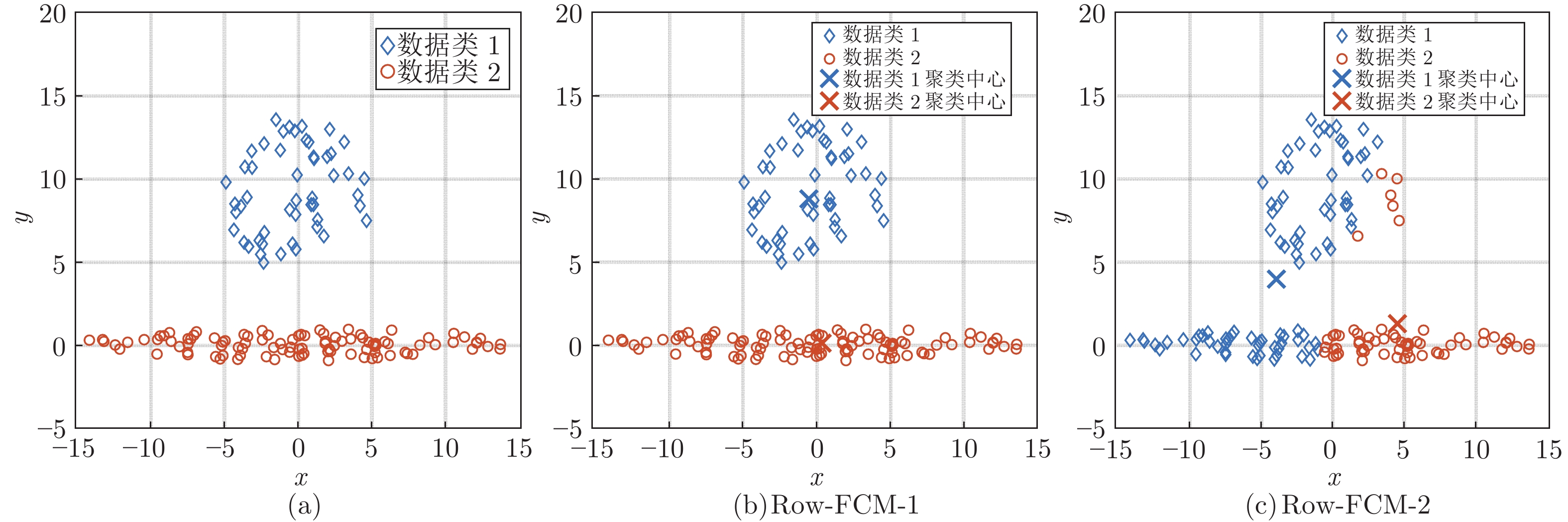
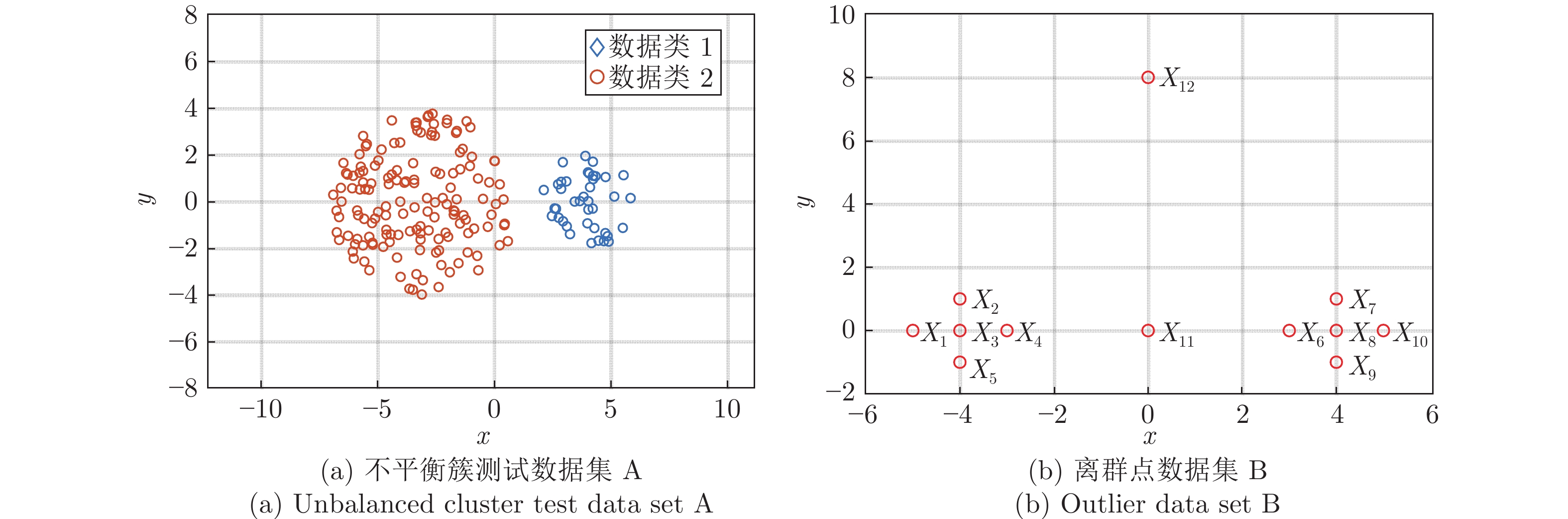
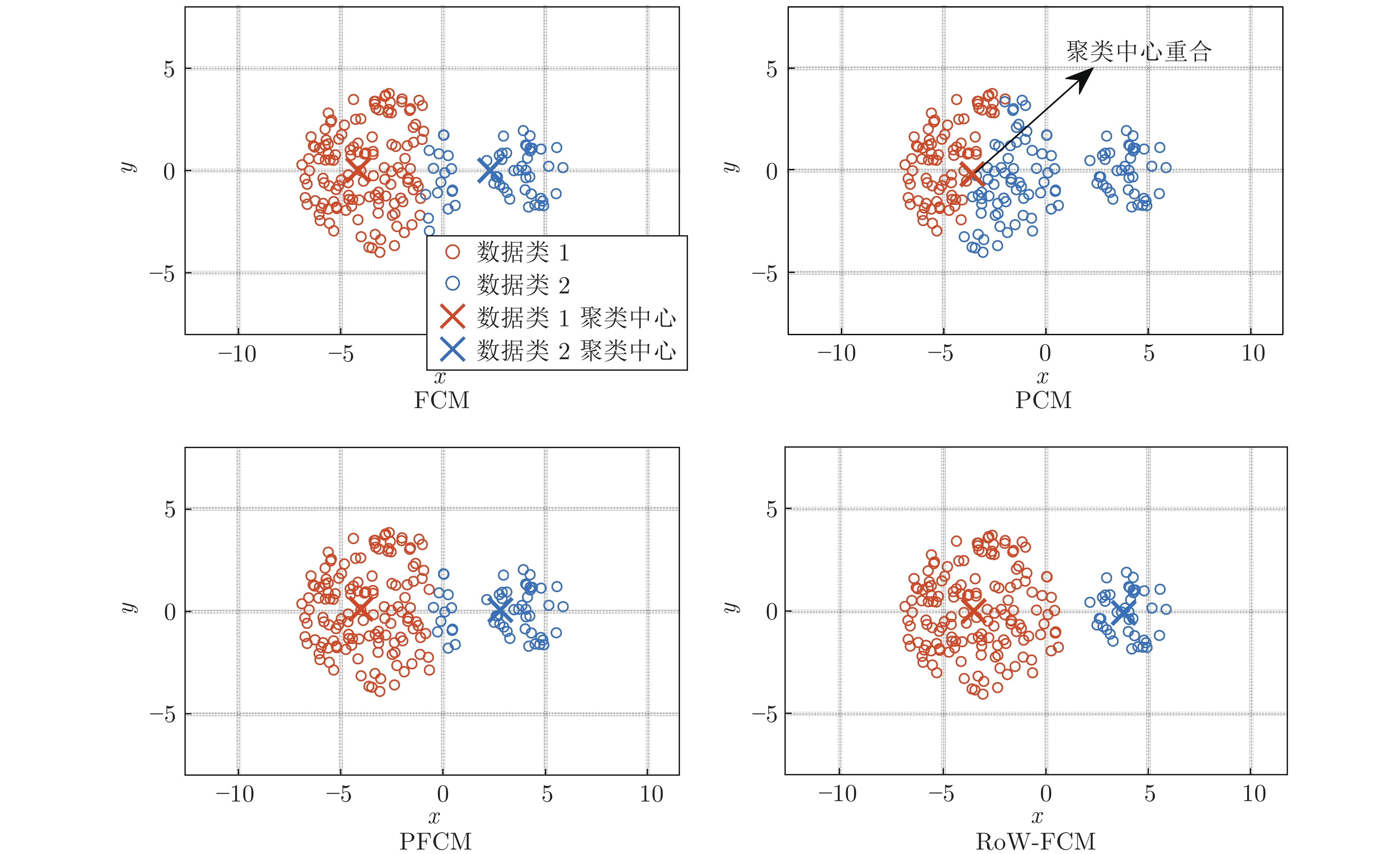
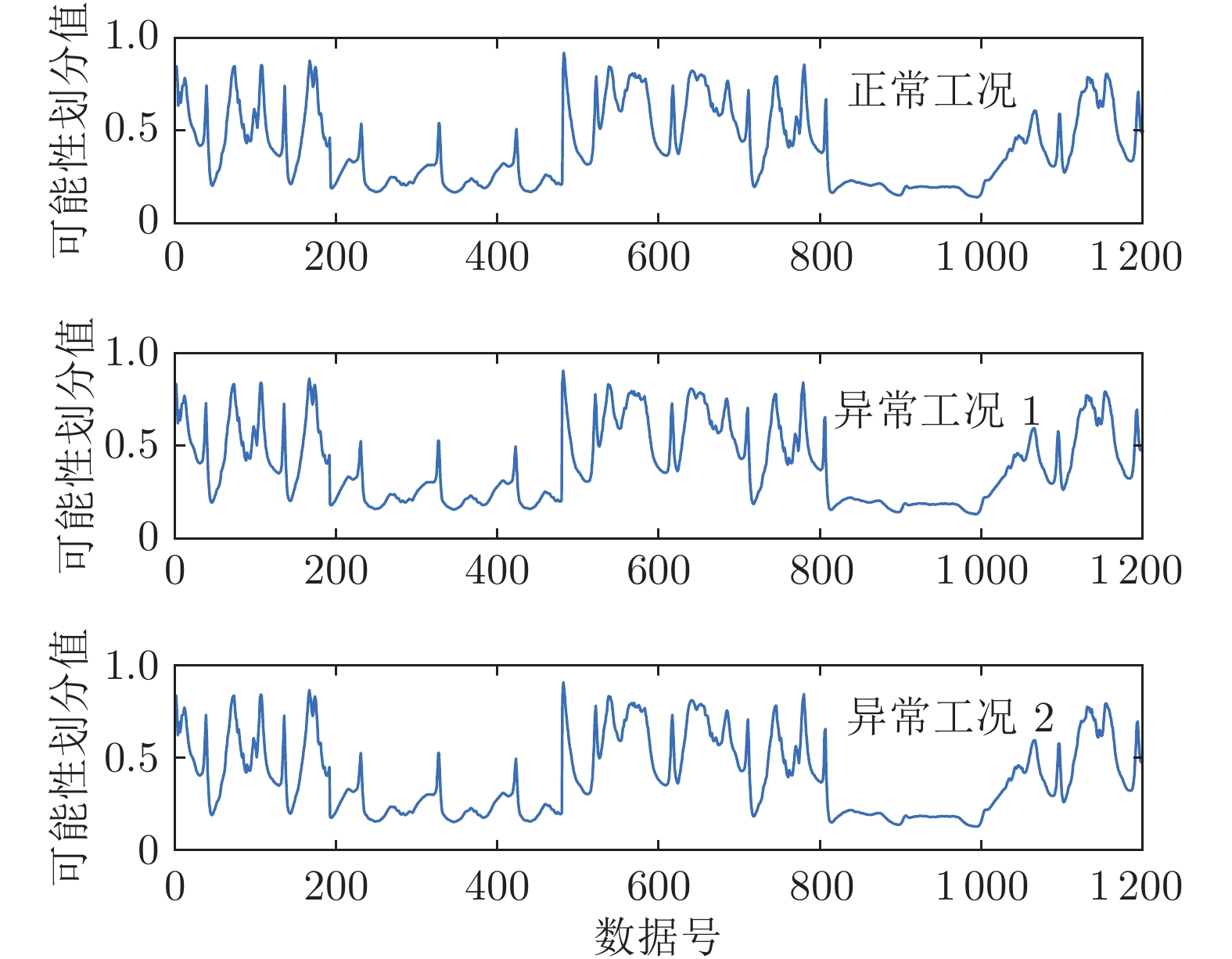
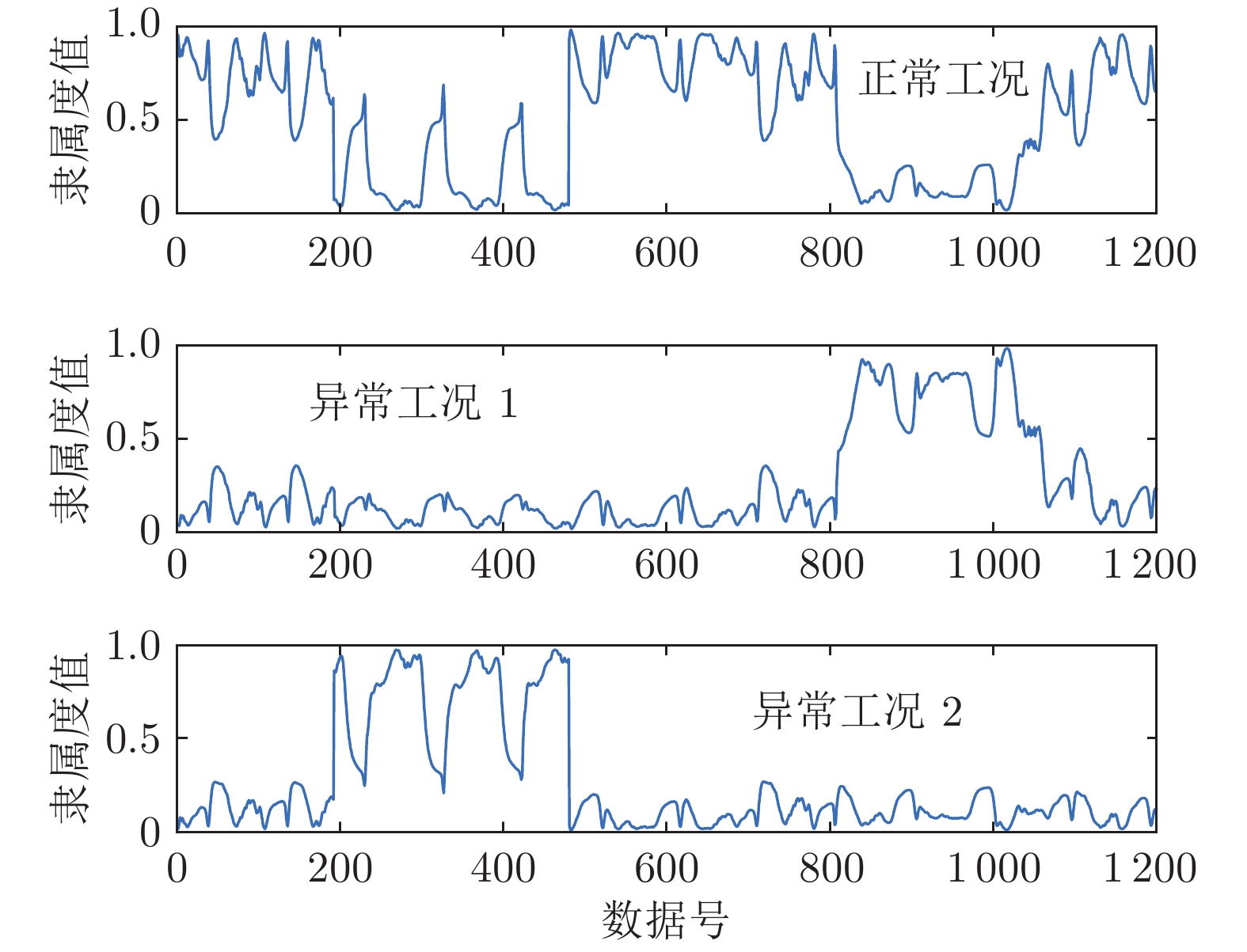
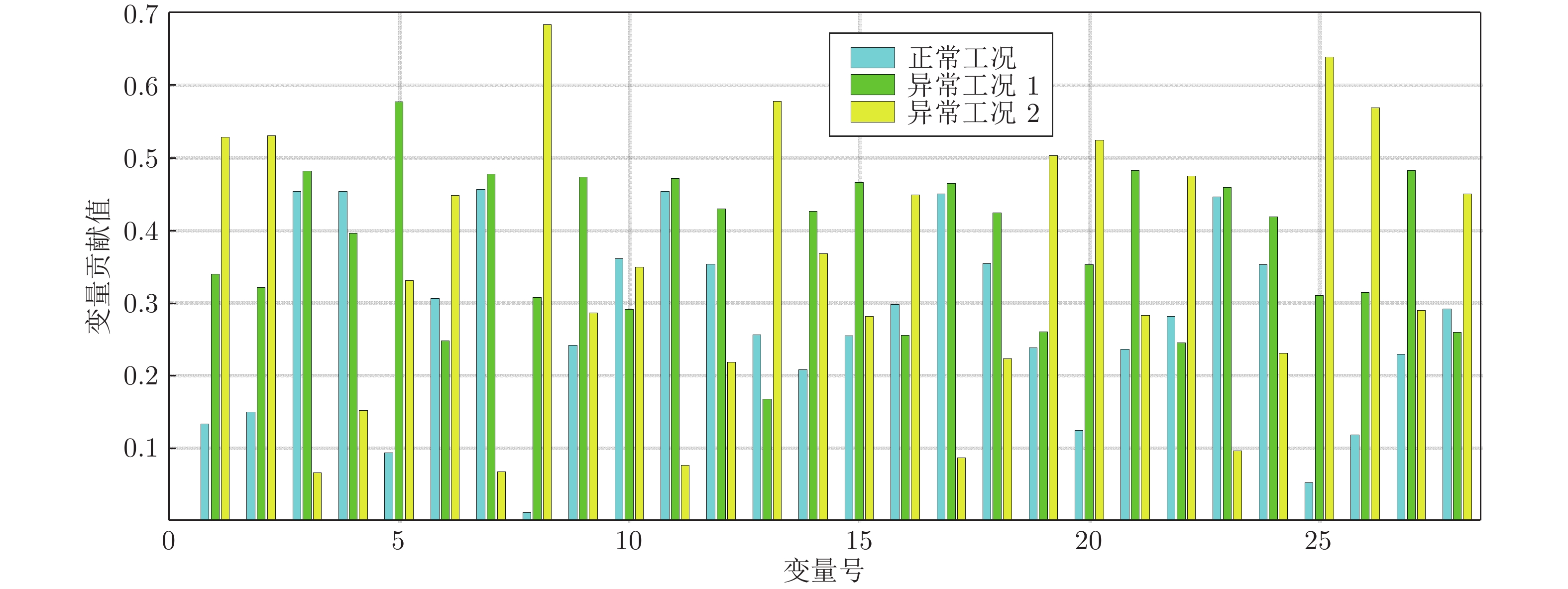
针对非线性强、先验故障知识少、异常工况识别难的污水处理过程监测问题, 提出一种基于鲁棒加权模糊c均值(Robust weighted fuzzy c-means, RoW-FCM)聚类与核偏最小二乘(Kernel partial least squares, KPLS)的过程监测方法. 首先, 针对污水处理过程的高维非线性耦合特性, 采用核偏最小二乘对高维输入变量进行降维; 其次, 针对传统基于最近邻分配的模糊c均值算法对离群点敏感以及存在聚类不平衡簇的问题, 提出充分考虑样本间相互关系的基于鲁棒加权模糊c均值聚类算法. 通过引入可能性划分矩阵作为权值参数实现不同样本数据的区分加权, 提高了离群点数据聚类的鲁棒性, 同时引入聚类大小控制参数解决不平衡簇的问题. 进一步将基于鲁棒加权模糊c均值算法对核偏最小二乘降维后的得分矩阵进行聚类, 利用聚类得到的隶属度矩阵实现异常工况的检测; 最后, 建立隶属度矩阵与过程变量的回归模型, 并利用得到的变量贡献矩阵描述变量对各个簇的解释程度, 实现异常工况的识别. 数值仿真以及污水处理过程数据实验表明该方法具有更好的鲁棒性能, 在异常工况检测和识别上具有较好的效果.
针对非线性强、先验故障知识少、异常工况识别难的污水处理过程监测问题, 提出一种基于鲁棒加权模糊c均值(Robust weighted fuzzy c-means, RoW-FCM)聚类与核偏最小二乘(Kernel partial least squares, KPLS)的过程监测方法. 首先, 针对污水处理过程的高维非线性耦合特性, 采用核偏最小二乘对高维输入变量进行降维; 其次, 针对传统基于最近邻分配的模糊c均值算法对离群点敏感以及存在聚类不平衡簇的问题, 提出充分考虑样本间相互关系的基于鲁棒加权模糊c均值聚类算法. 通过引入可能性划分矩阵作为权值参数实现不同样本数据的区分加权, 提高了离群点数据聚类的鲁棒性, 同时引入聚类大小控制参数解决不平衡簇的问题. 进一步将基于鲁棒加权模糊c均值算法对核偏最小二乘降维后的得分矩阵进行聚类, 利用聚类得到的隶属度矩阵实现异常工况的检测; 最后, 建立隶属度矩阵与过程变量的回归模型, 并利用得到的变量贡献矩阵描述变量对各个簇的解释程度, 实现异常工况的识别. 数值仿真以及污水处理过程数据实验表明该方法具有更好的鲁棒性能, 在异常工况检测和识别上具有较好的效果.



2022, 48(9): 2212-2222.
doi: 10.16383/j.aas.c211198
摘要:
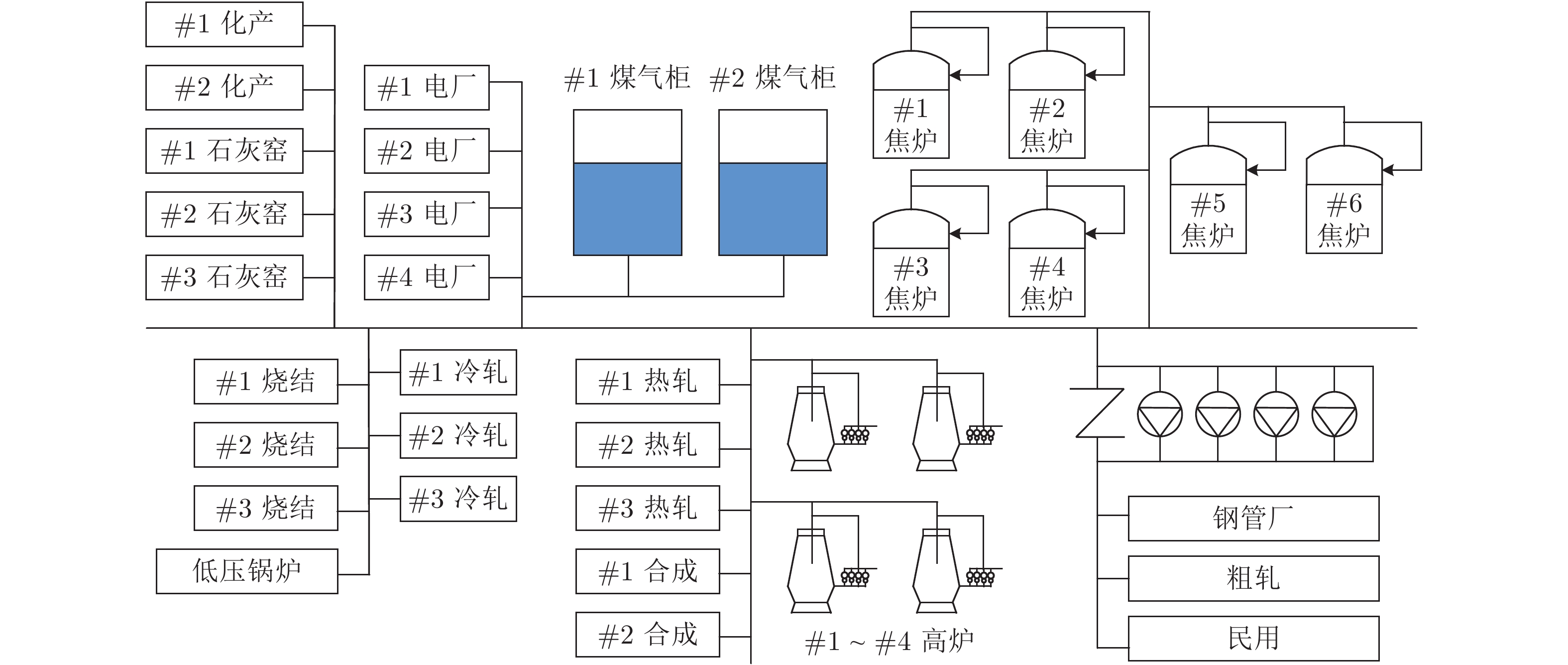
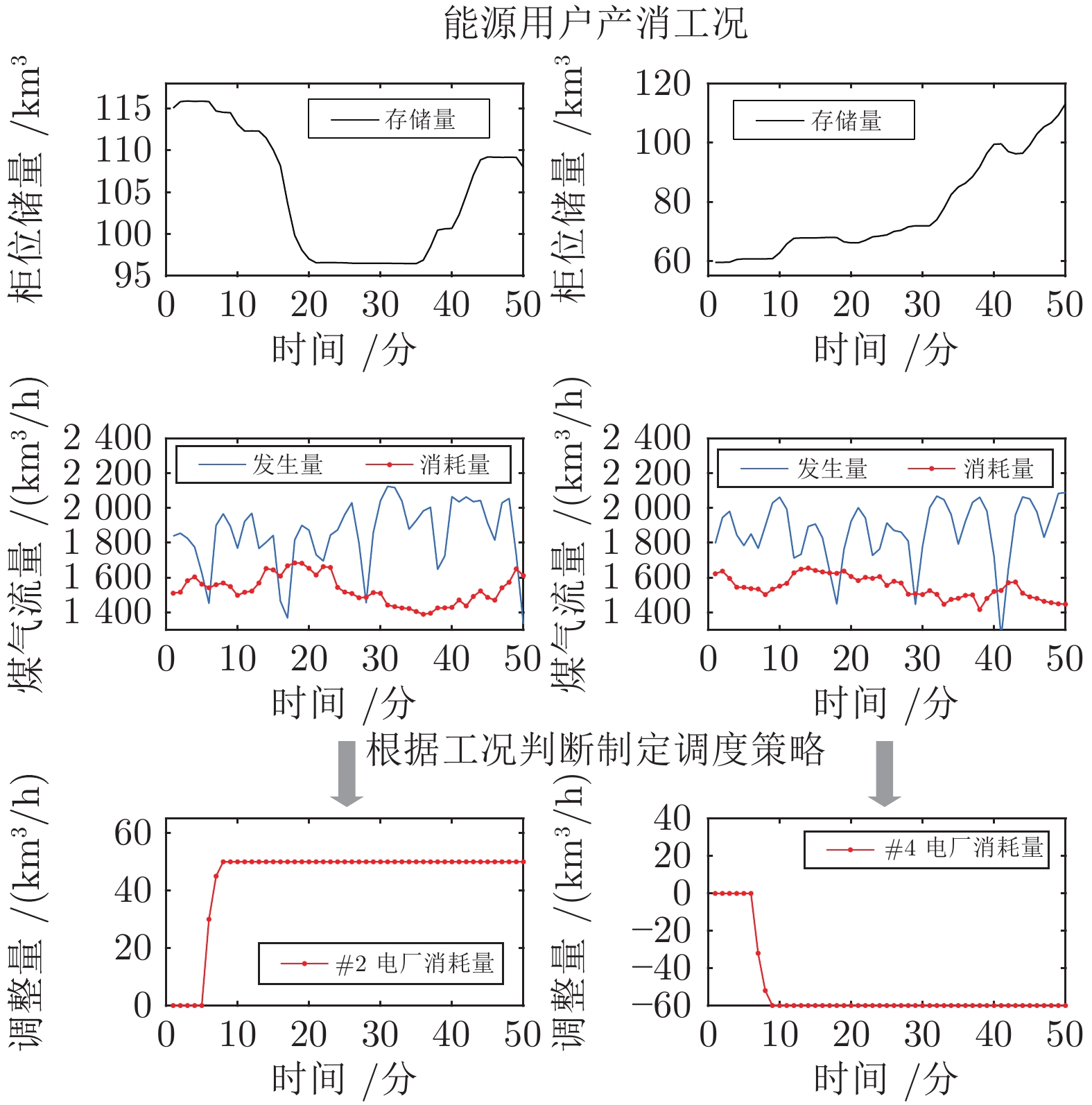
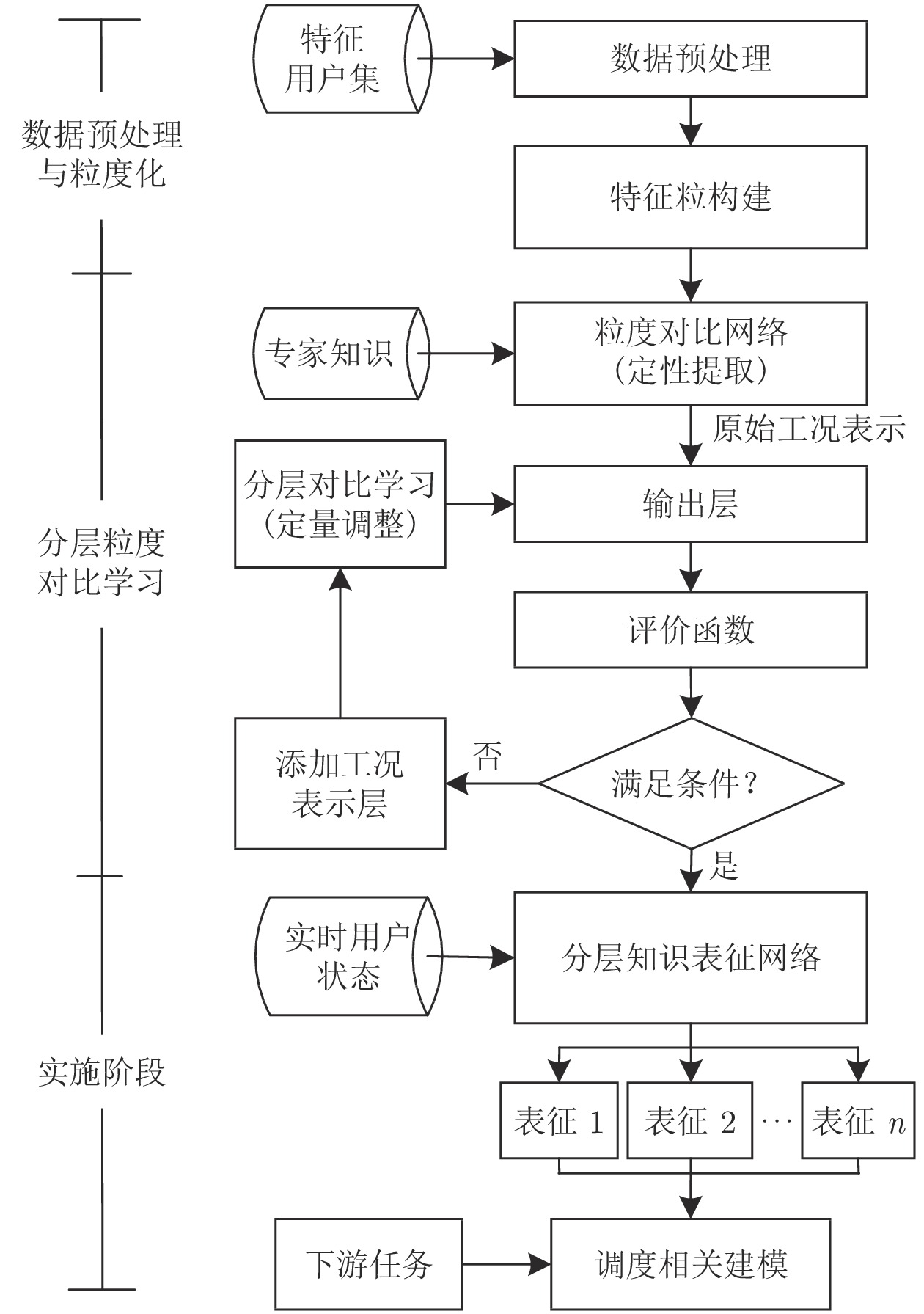
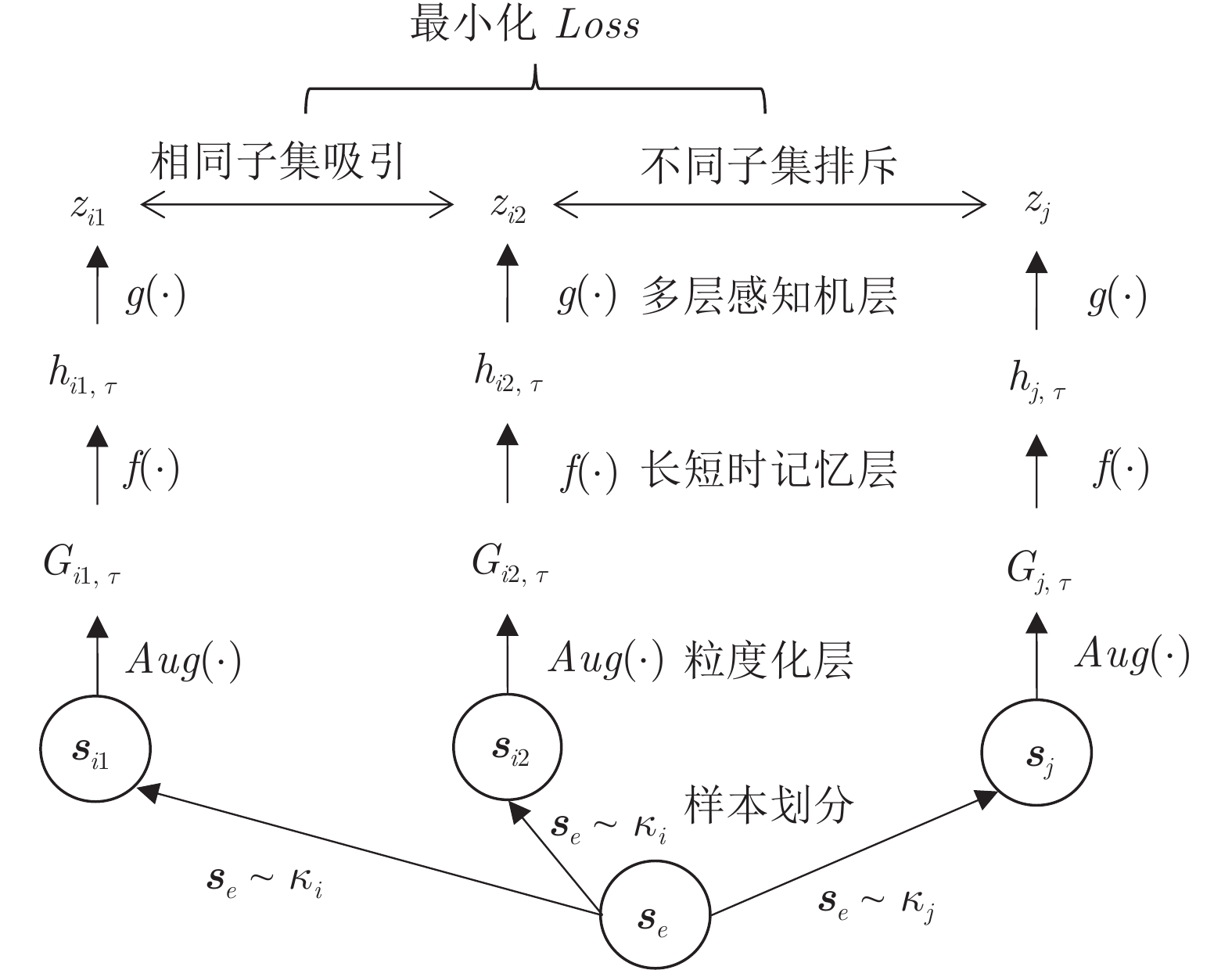
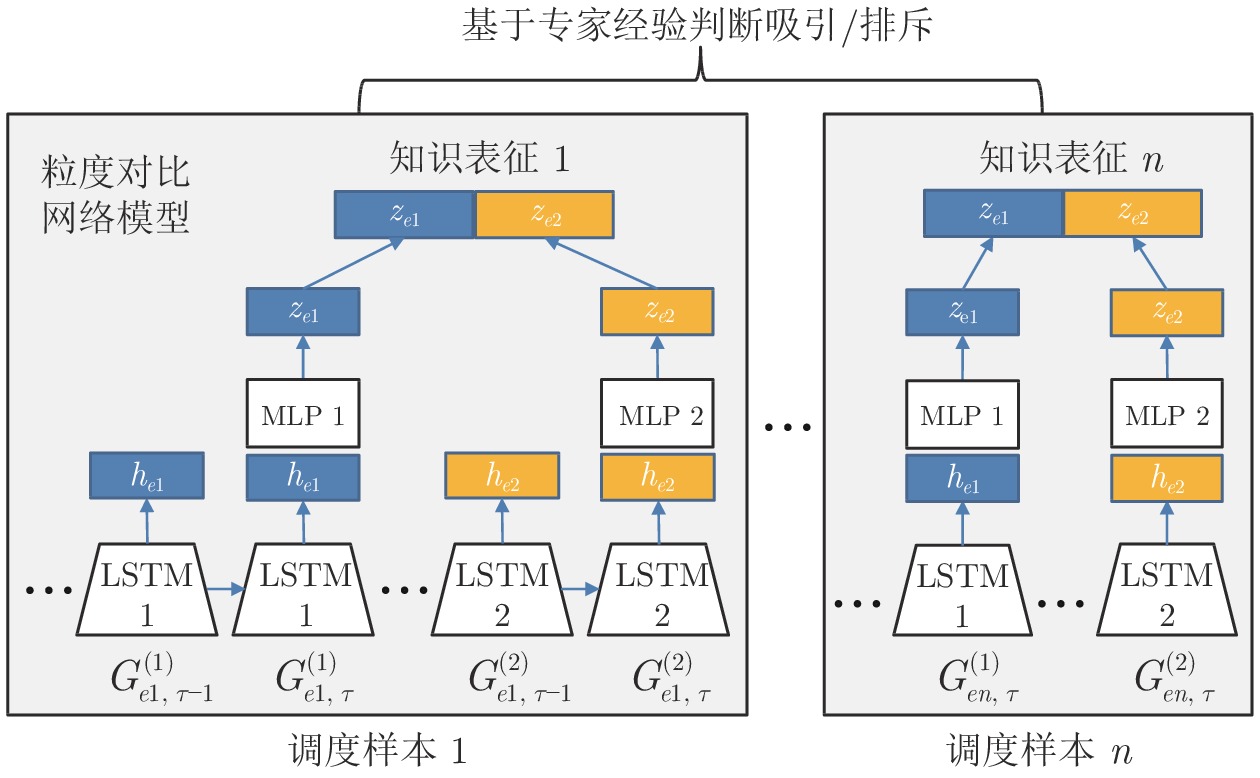
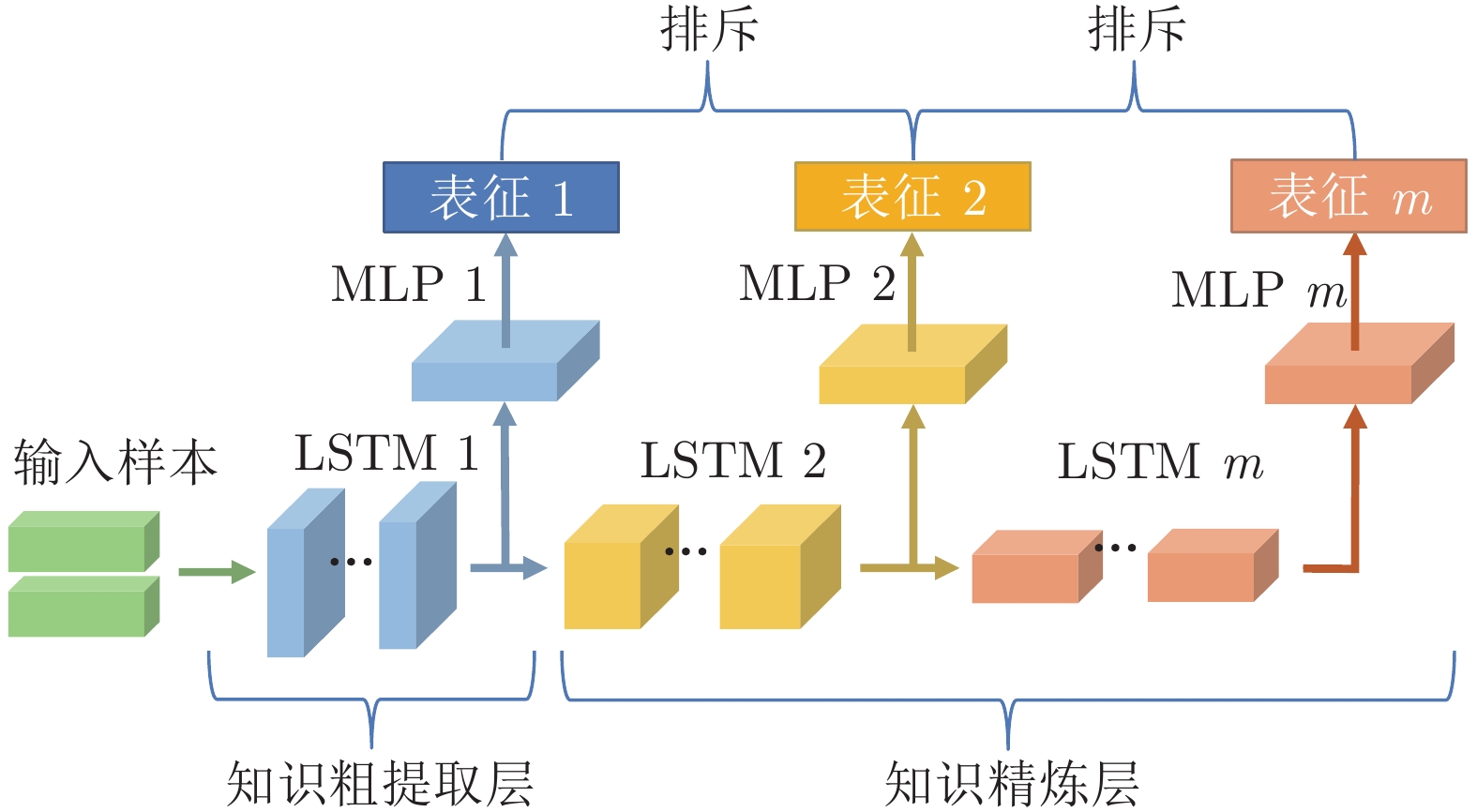
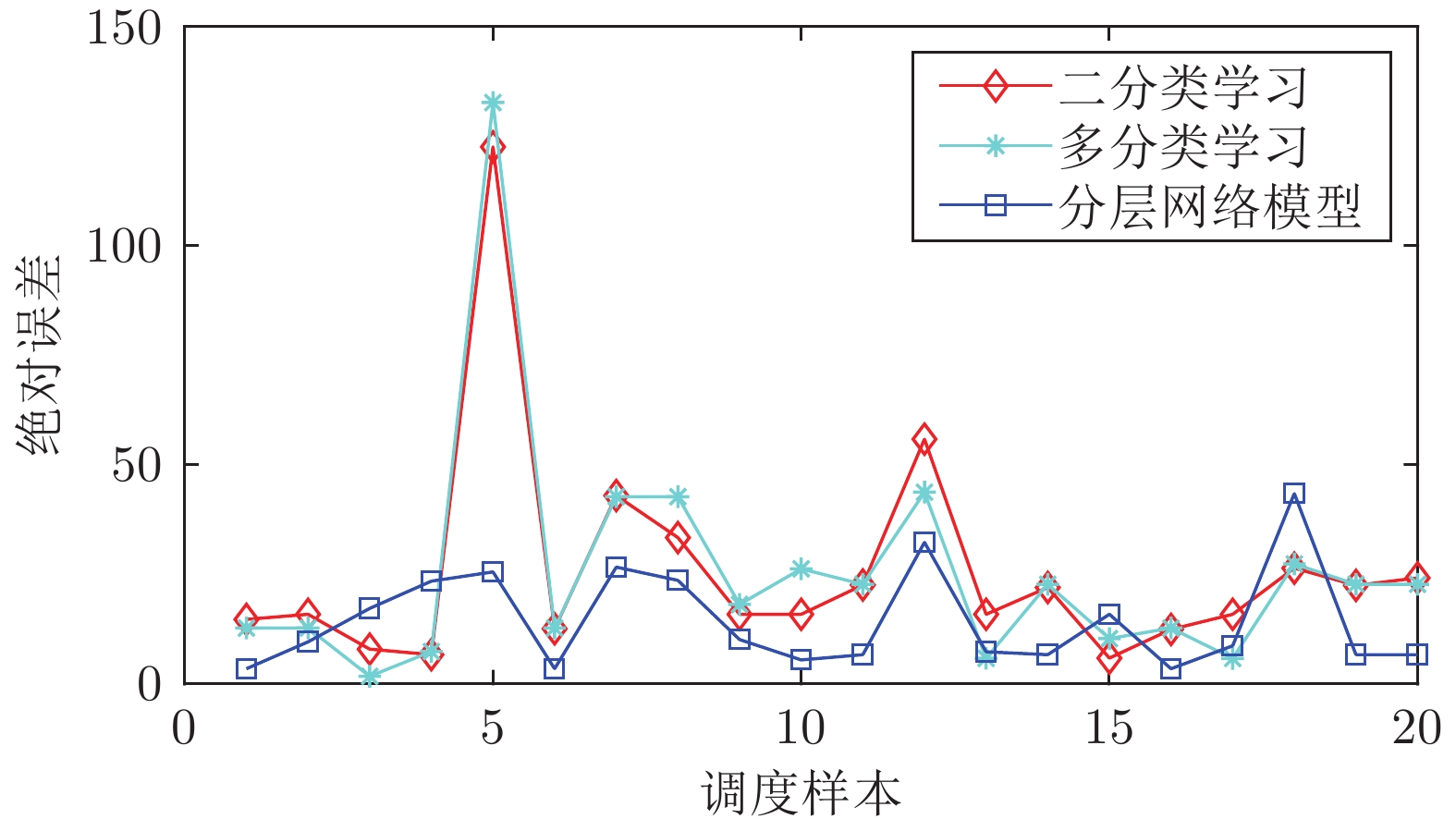
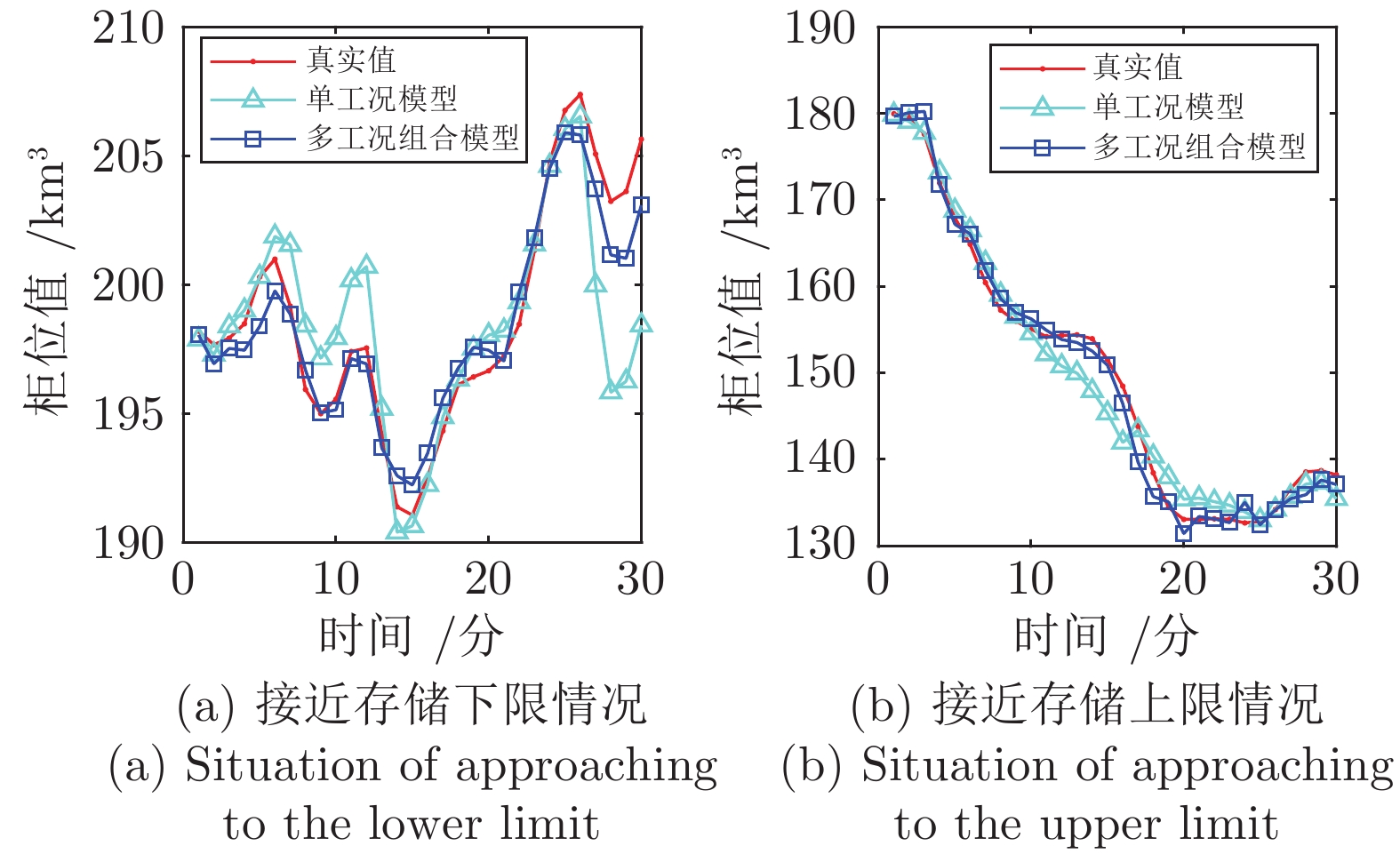
对于钢铁燃气系统的实时有效调度是实现企业节能降耗的关键. 考虑燃气产消过程所包含的多工况特征, 提出了一种基于分层粒度对比网络的调度知识获取与建模方法. 鉴于深度对比学习对于语义信息的处理能力, 定义和描述了一系列信息粒度, 以建立能源数据的语义表示. 为初步提取多工况调度知识, 采用长短时记忆(Long and short-term memory, LSTM)网络学习具有时变特性的粒度变量特征. 在此基础上, 利用专家经验知识定性地划分对比学习样本, 建立基于粒度对比学习的知识表征网络. 为挖掘调度数据中所包含的深层次知识, 进一步提出了基于反馈机制的分层对比网络模型, 并通过网络输出层实现调度建模任务. 实验部分采用了国内某钢铁厂高炉煤气系统的实际数据进行了多组对比实验, 结果表明所提方法获得的知识表示能够有效提高燃气系统的建模精度, 帮助实现专家级别的调度表现.
对于钢铁燃气系统的实时有效调度是实现企业节能降耗的关键. 考虑燃气产消过程所包含的多工况特征, 提出了一种基于分层粒度对比网络的调度知识获取与建模方法. 鉴于深度对比学习对于语义信息的处理能力, 定义和描述了一系列信息粒度, 以建立能源数据的语义表示. 为初步提取多工况调度知识, 采用长短时记忆(Long and short-term memory, LSTM)网络学习具有时变特性的粒度变量特征. 在此基础上, 利用专家经验知识定性地划分对比学习样本, 建立基于粒度对比学习的知识表征网络. 为挖掘调度数据中所包含的深层次知识, 进一步提出了基于反馈机制的分层对比网络模型, 并通过网络输出层实现调度建模任务. 实验部分采用了国内某钢铁厂高炉煤气系统的实际数据进行了多组对比实验, 结果表明所提方法获得的知识表示能够有效提高燃气系统的建模精度, 帮助实现专家级别的调度表现.



2022, 48(9): 2223-2232.
doi: 10.16383/j.aas.c200070
摘要:
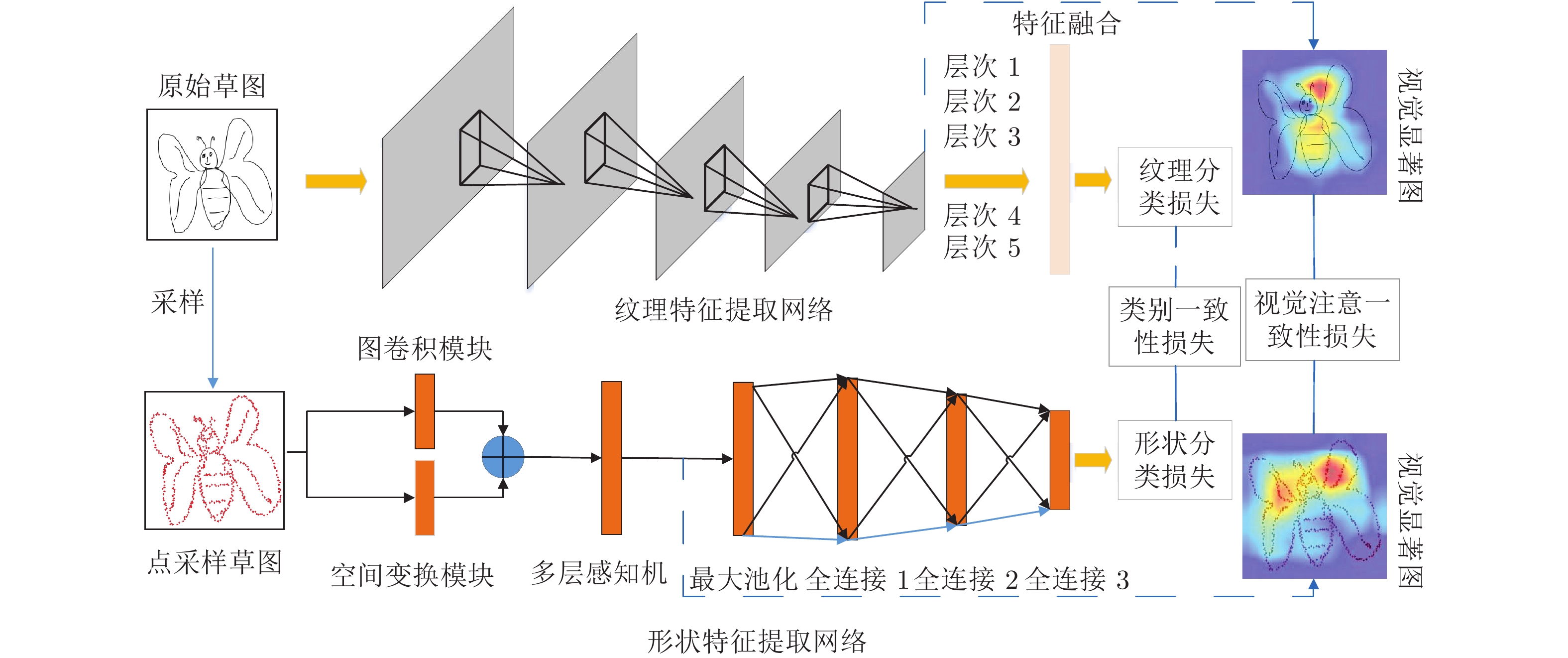
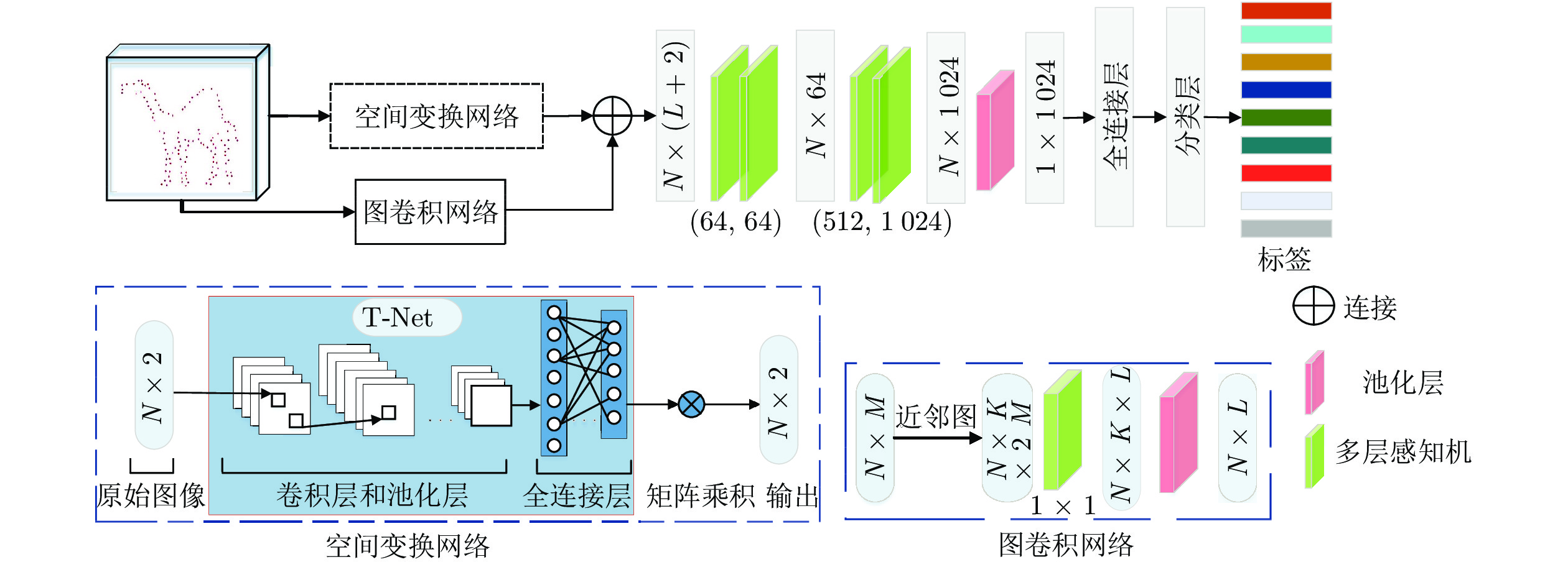
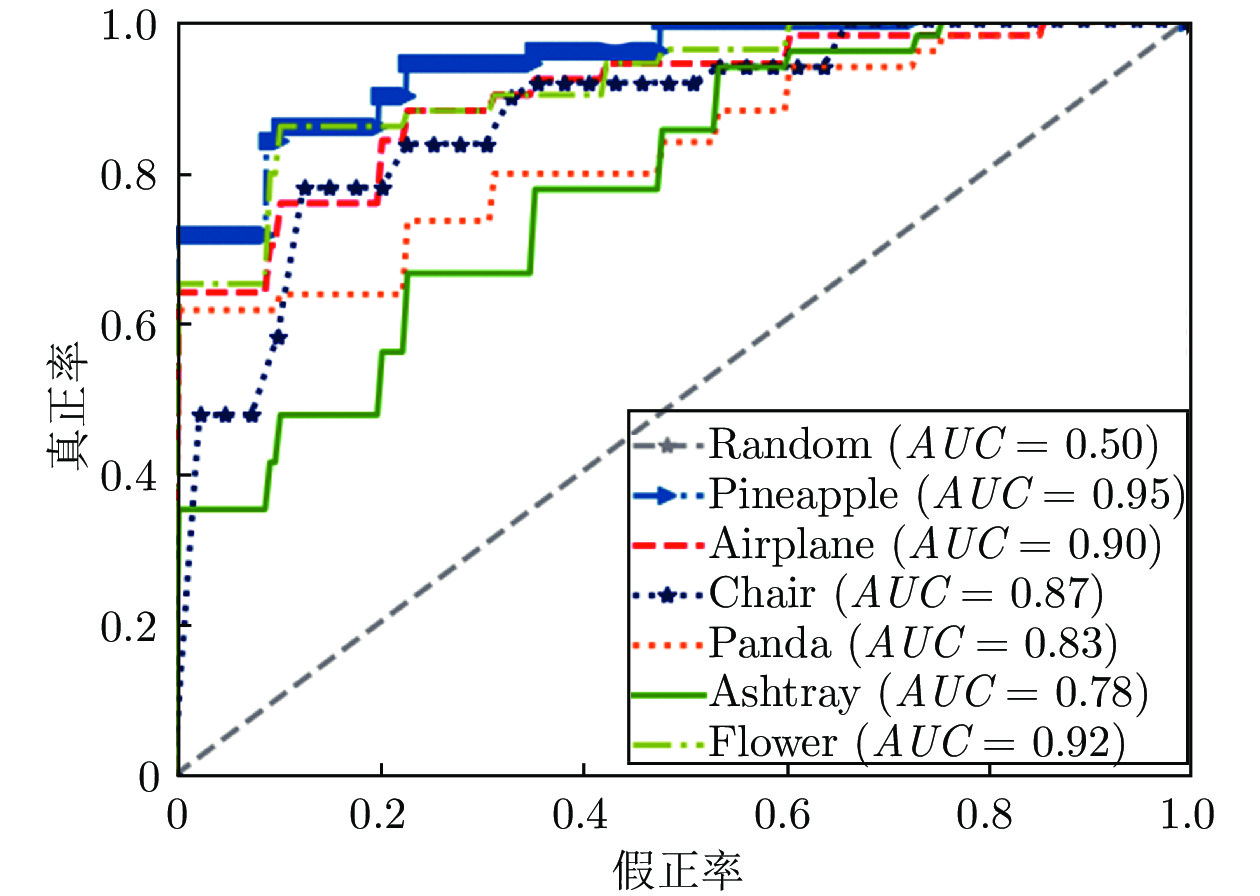
人类具有很强的草图识别能力. 然而, 由于草图具有稀疏性和缺少细节的特点, 目前的深度学习模型在草图分类任务上仍然面临挑战. 目前的工作只是将草图看作灰度图像而忽略了不同草图类别间的形状表示差异. 提出一种端到端的手绘草图识别模型, 简称双模型融合网络, 它可以通过相互学习策略获取草图的纹理和形状信息. 具体地, 该模型由2个分支组成: 一个分支能够从图像表示(即原始草图)中自动提取纹理特征, 另一个分支能够从图形表示(即基于点的草图)中自动提取形状特征. 此外, 提出视觉注意一致性损失来度量2个分支之间视觉显著图的一致性, 这样可以保证2个分支关注相同的判别性区域. 最终将分类损失、类别一致性损失和视觉注意一致性损失结合完成双模型融合网络的优化. 在两个具有挑战性的数据集TU-Berlin数据集和Sketchy数据集上进行草图分类实验, 评估结果说明了双模型融合网络显著优于基准方法并达到最佳性能.
人类具有很强的草图识别能力. 然而, 由于草图具有稀疏性和缺少细节的特点, 目前的深度学习模型在草图分类任务上仍然面临挑战. 目前的工作只是将草图看作灰度图像而忽略了不同草图类别间的形状表示差异. 提出一种端到端的手绘草图识别模型, 简称双模型融合网络, 它可以通过相互学习策略获取草图的纹理和形状信息. 具体地, 该模型由2个分支组成: 一个分支能够从图像表示(即原始草图)中自动提取纹理特征, 另一个分支能够从图形表示(即基于点的草图)中自动提取形状特征. 此外, 提出视觉注意一致性损失来度量2个分支之间视觉显著图的一致性, 这样可以保证2个分支关注相同的判别性区域. 最终将分类损失、类别一致性损失和视觉注意一致性损失结合完成双模型融合网络的优化. 在两个具有挑战性的数据集TU-Berlin数据集和Sketchy数据集上进行草图分类实验, 评估结果说明了双模型融合网络显著优于基准方法并达到最佳性能.


2022, 48(9): 2233-2241.
doi: 10.16383/j.aas.c190428
摘要:
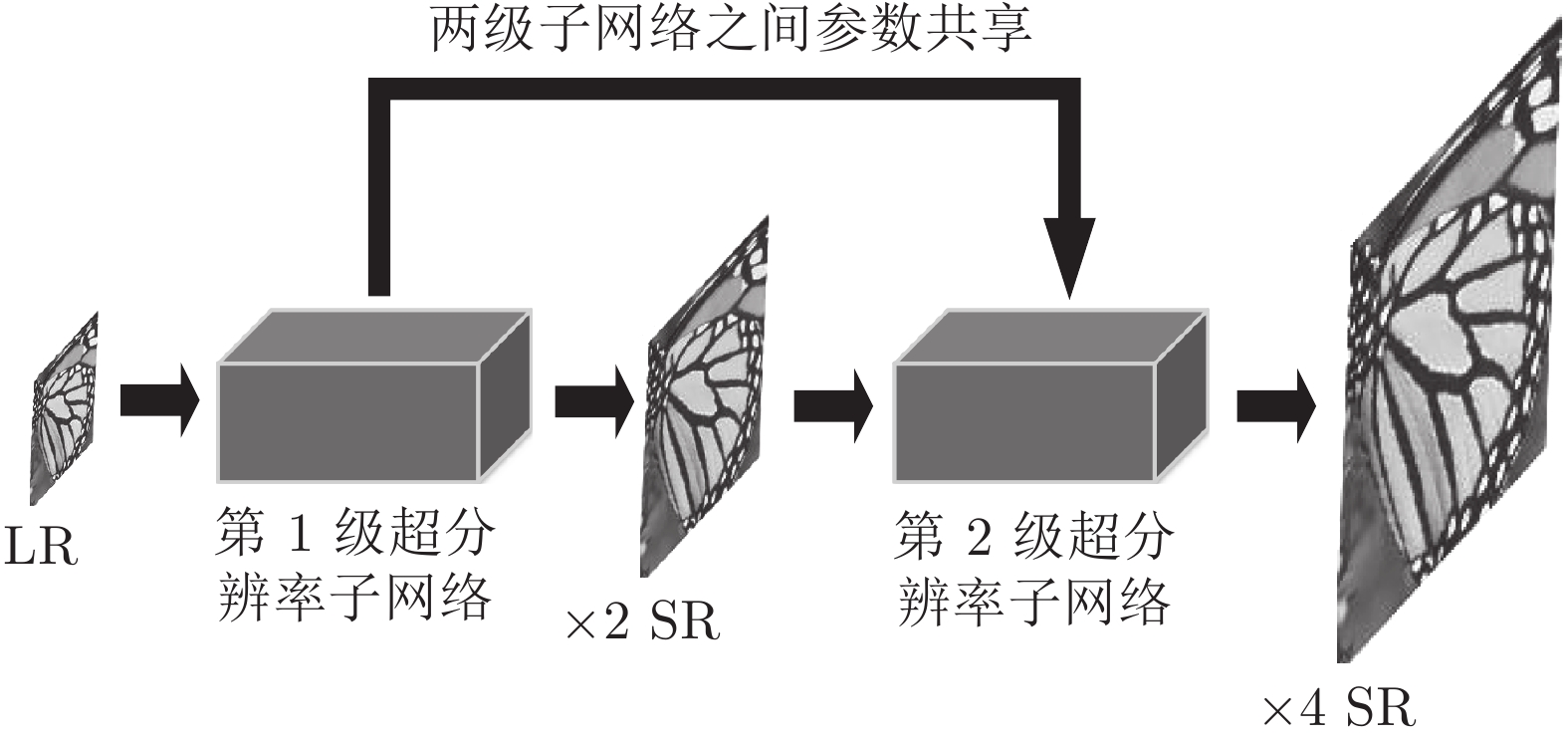
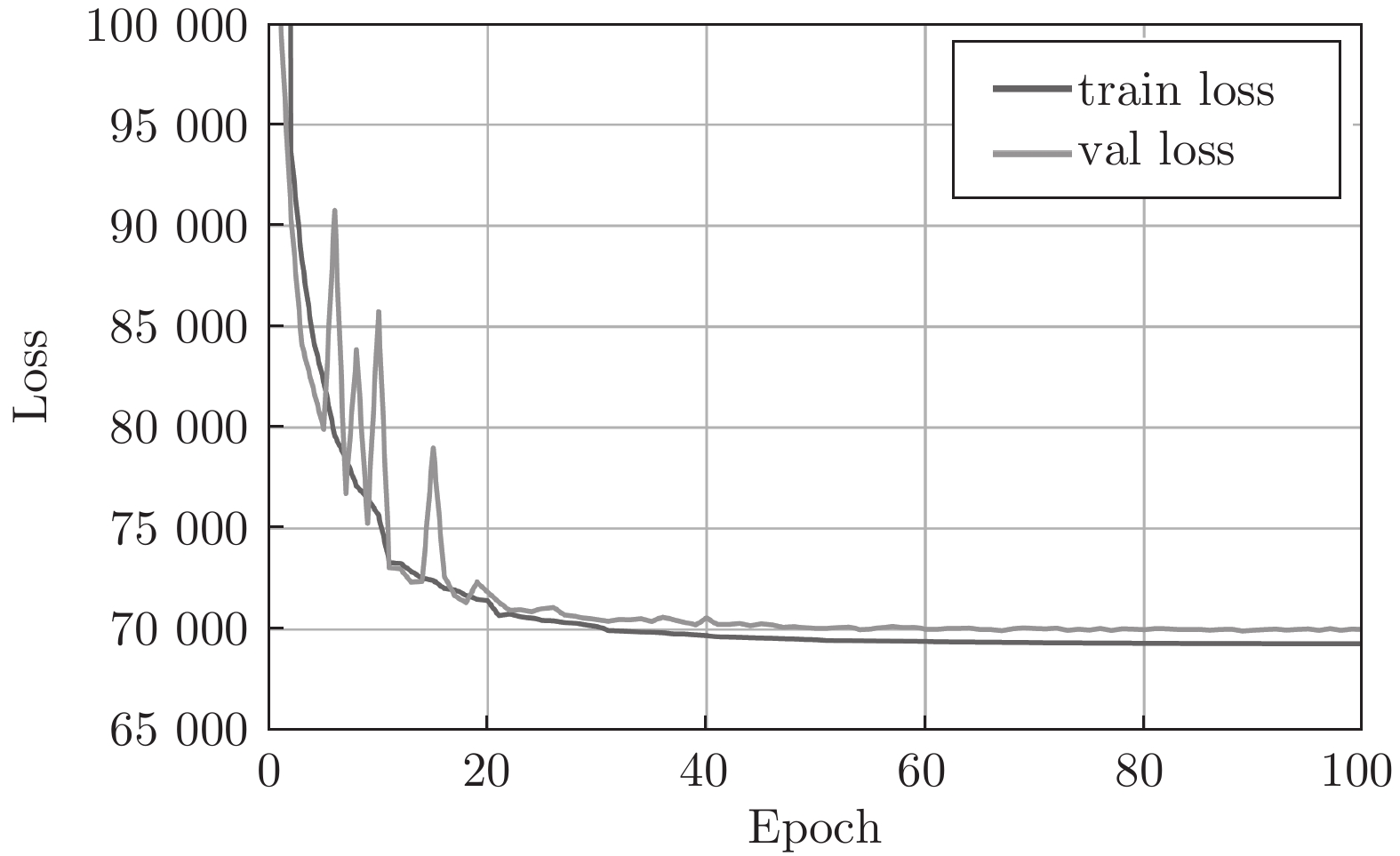
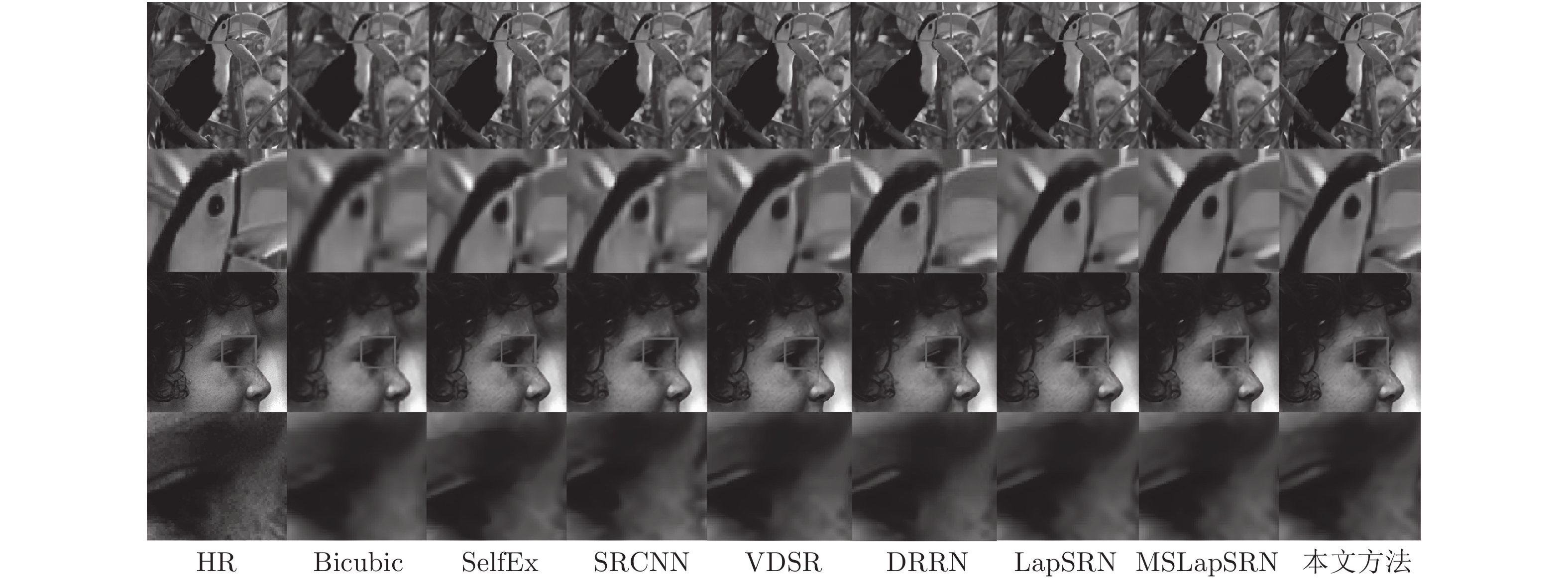
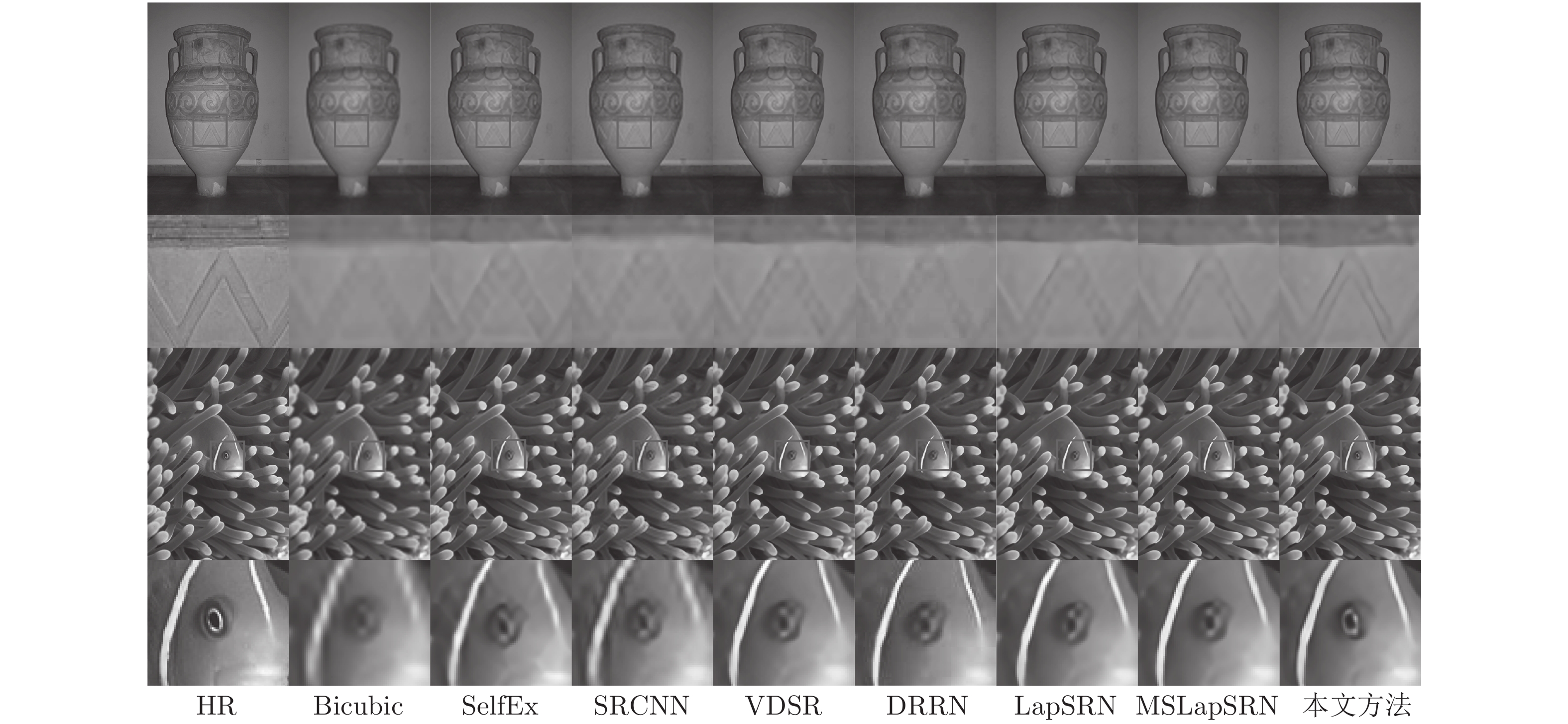
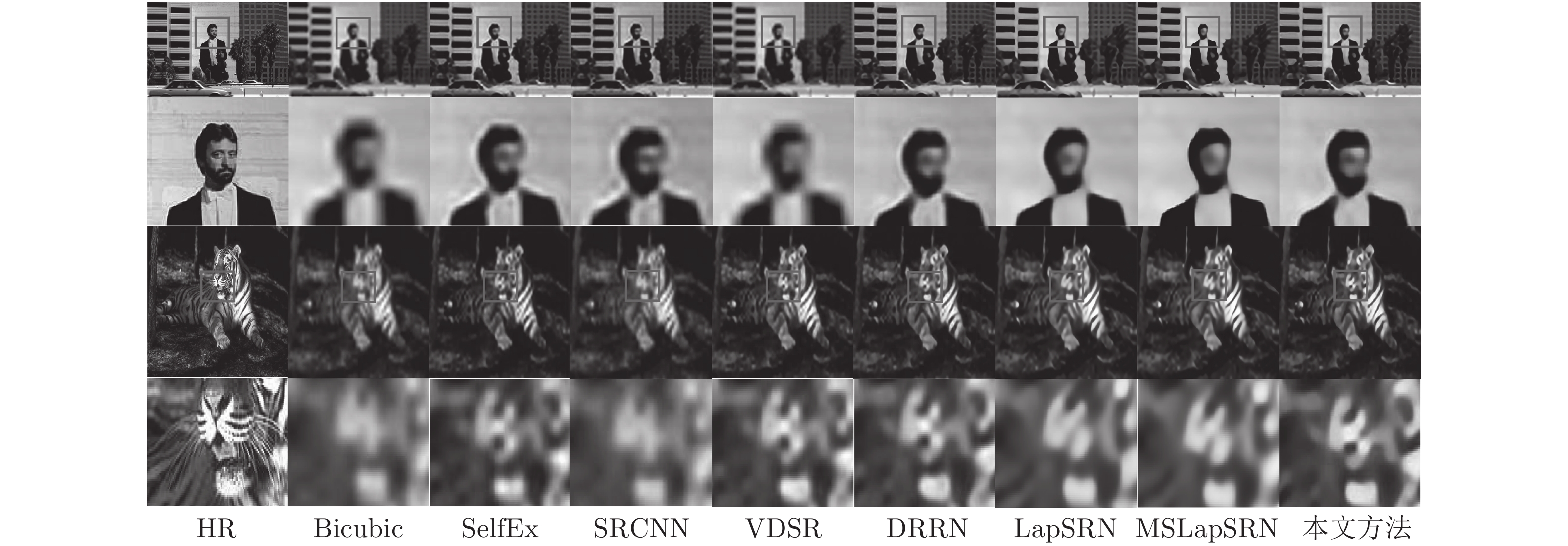
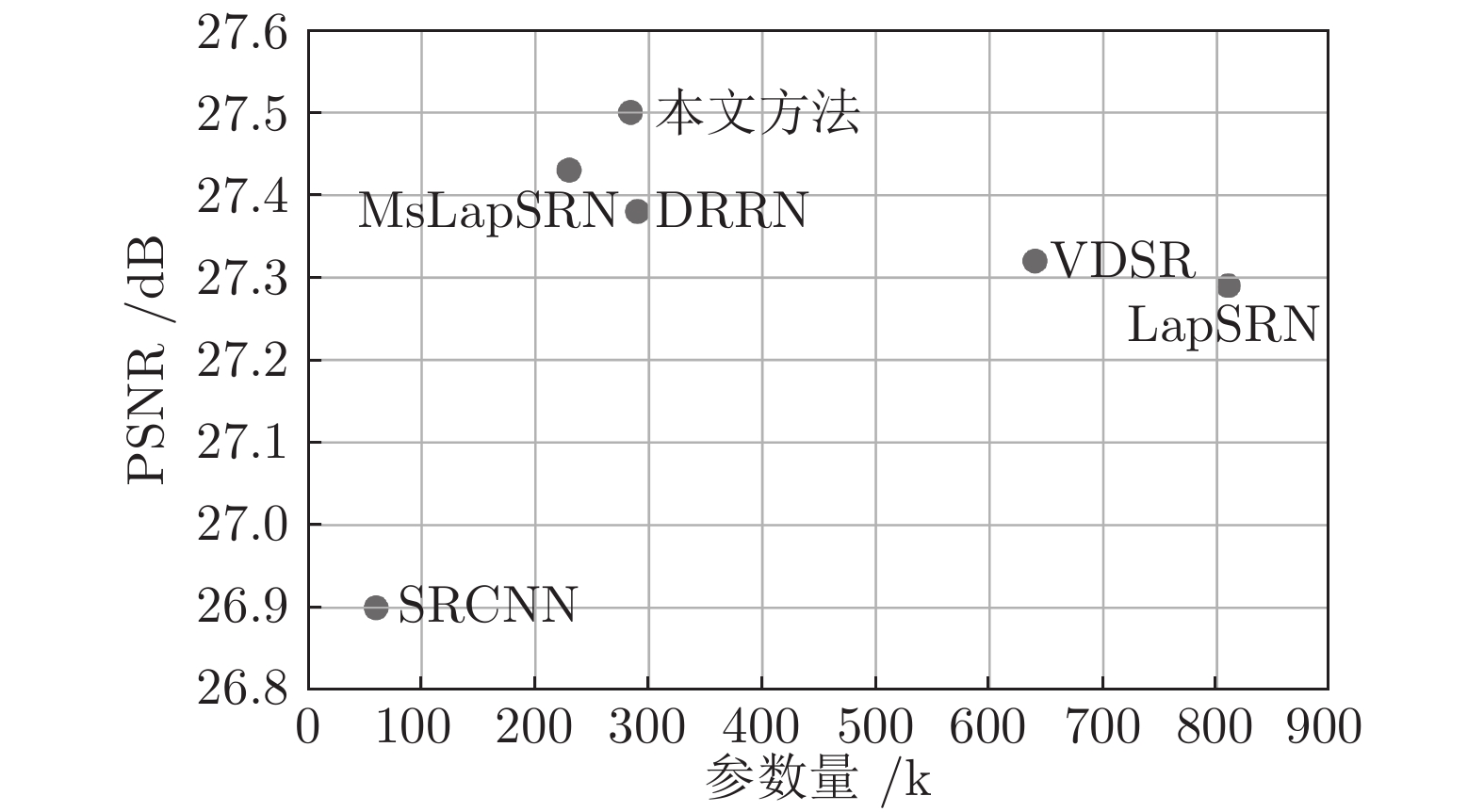
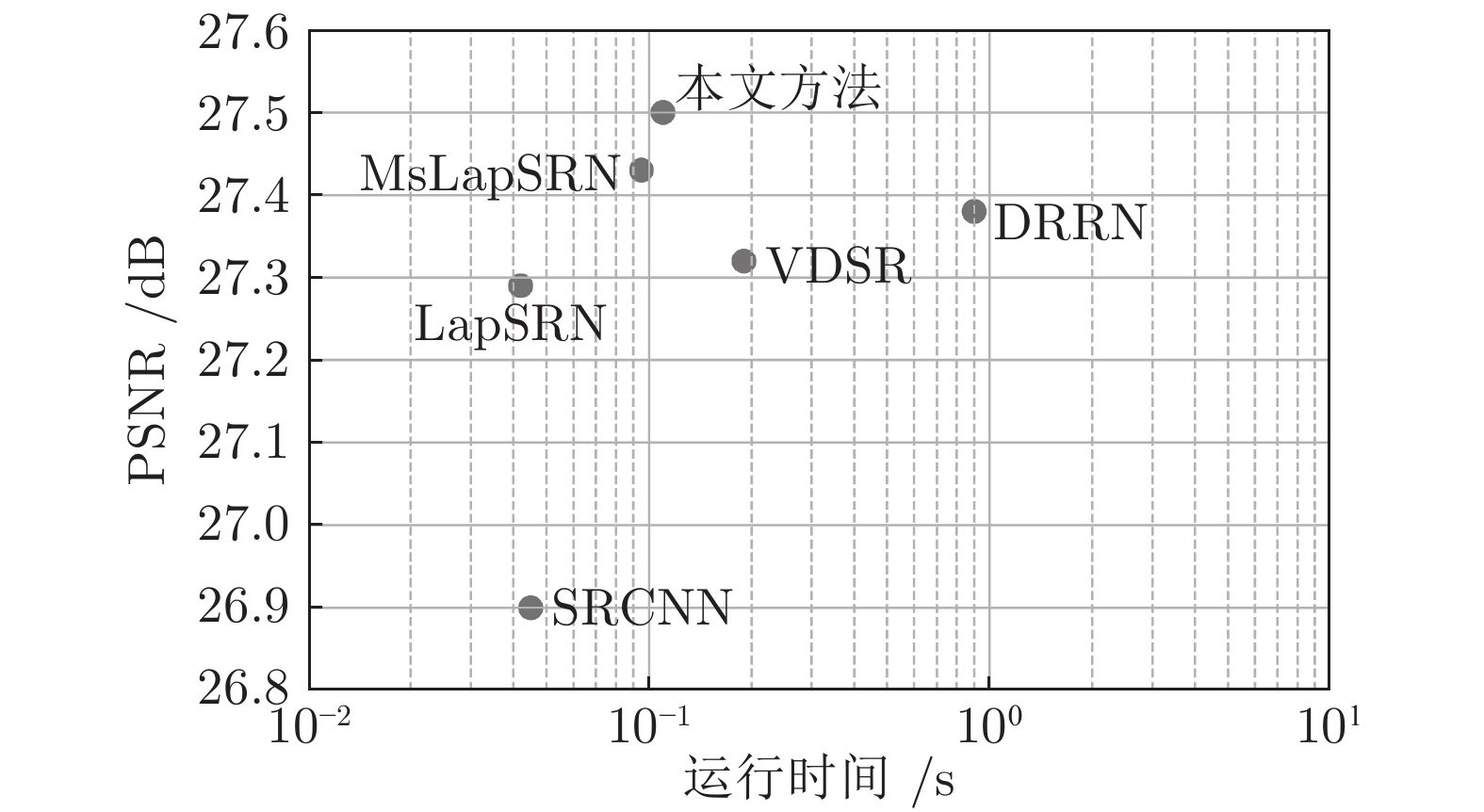
近年来, 基于深度卷积神经网络的单图像超分辨率重建, 取得了显著的进展, 但是, 仍然存在诸如特征利用率低、网络参数量大和重建图像细节纹理模糊等问题. 我们提出了基于特征融合注意网络的单图像超分辨率方法, 网络模型主要包括特征融合子网络和特征注意子网络. 特征融合子网络可以更好地融合不同深度的特征信息, 以及增加跨通道的学习能力; 特征注意子网络则着重关注高频信息, 以增强边缘和纹理. 实验结果表明: 无论是主观视觉效果, 还是客观度量, 我们方法的超分辨率性能明显优于其他代表性的方法.
近年来, 基于深度卷积神经网络的单图像超分辨率重建, 取得了显著的进展, 但是, 仍然存在诸如特征利用率低、网络参数量大和重建图像细节纹理模糊等问题. 我们提出了基于特征融合注意网络的单图像超分辨率方法, 网络模型主要包括特征融合子网络和特征注意子网络. 特征融合子网络可以更好地融合不同深度的特征信息, 以及增加跨通道的学习能力; 特征注意子网络则着重关注高频信息, 以增强边缘和纹理. 实验结果表明: 无论是主观视觉效果, 还是客观度量, 我们方法的超分辨率性能明显优于其他代表性的方法.





2022, 48(9): 2242-2253.
doi: 10.16383/j.aas.c190853
摘要:
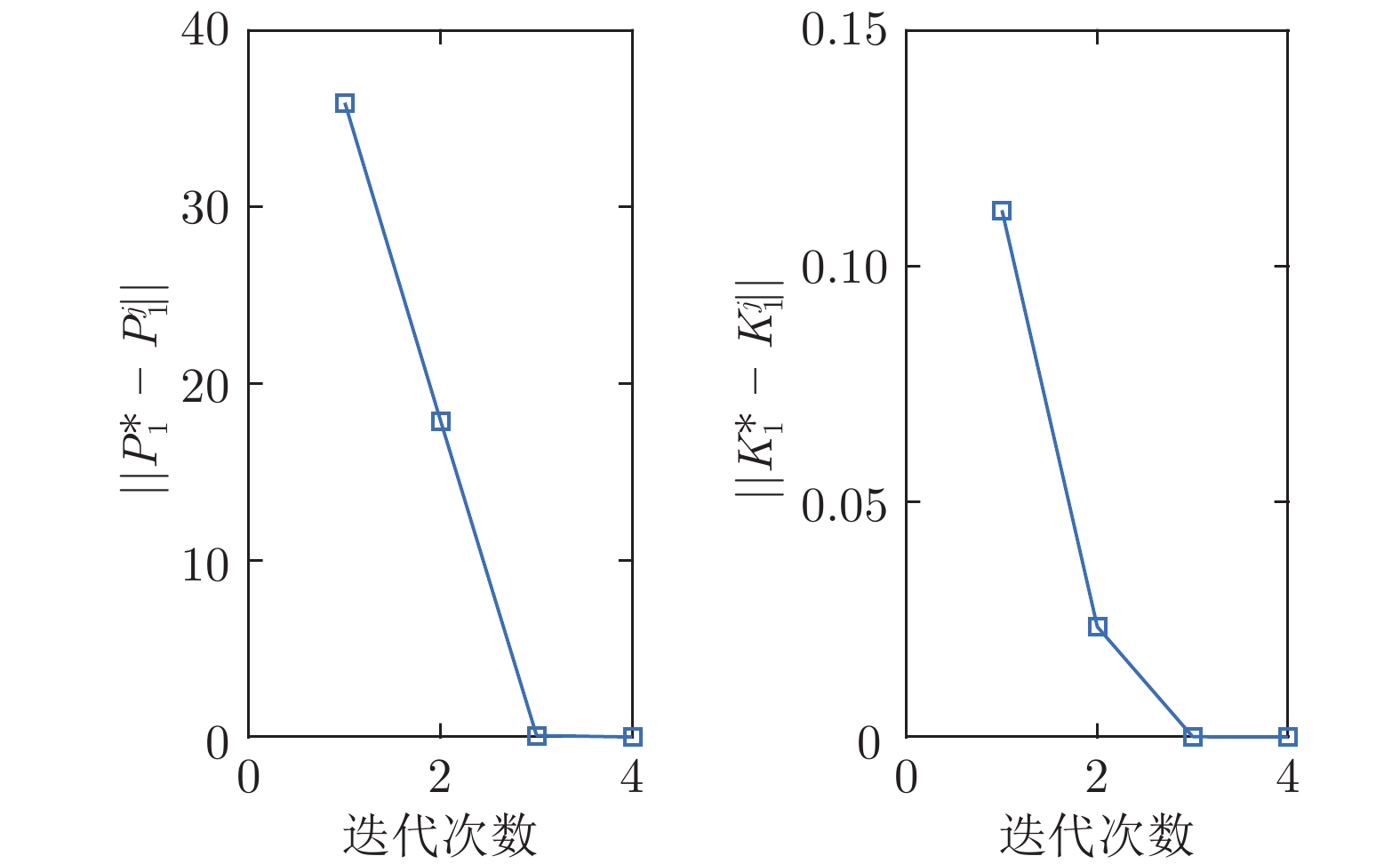
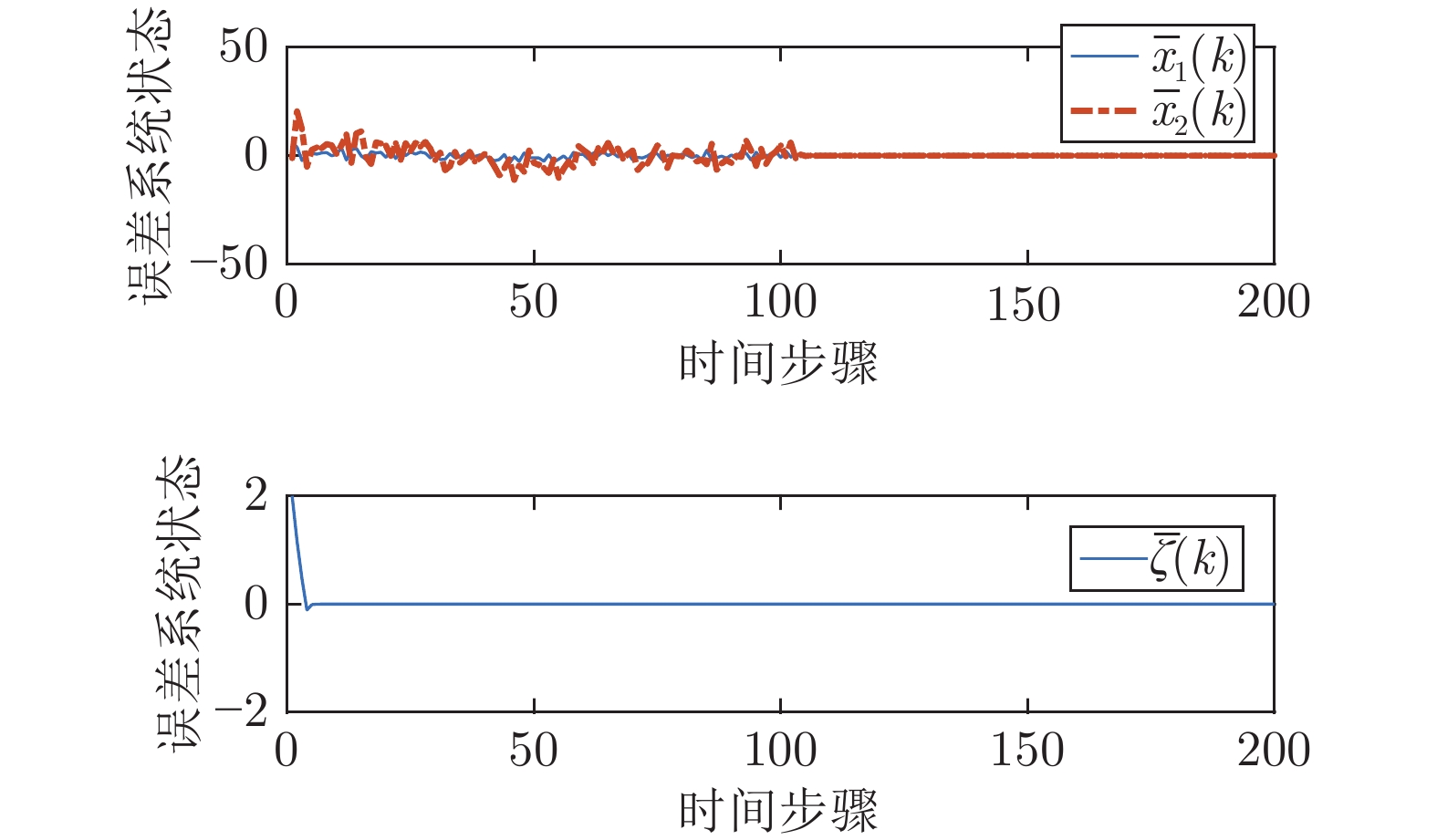
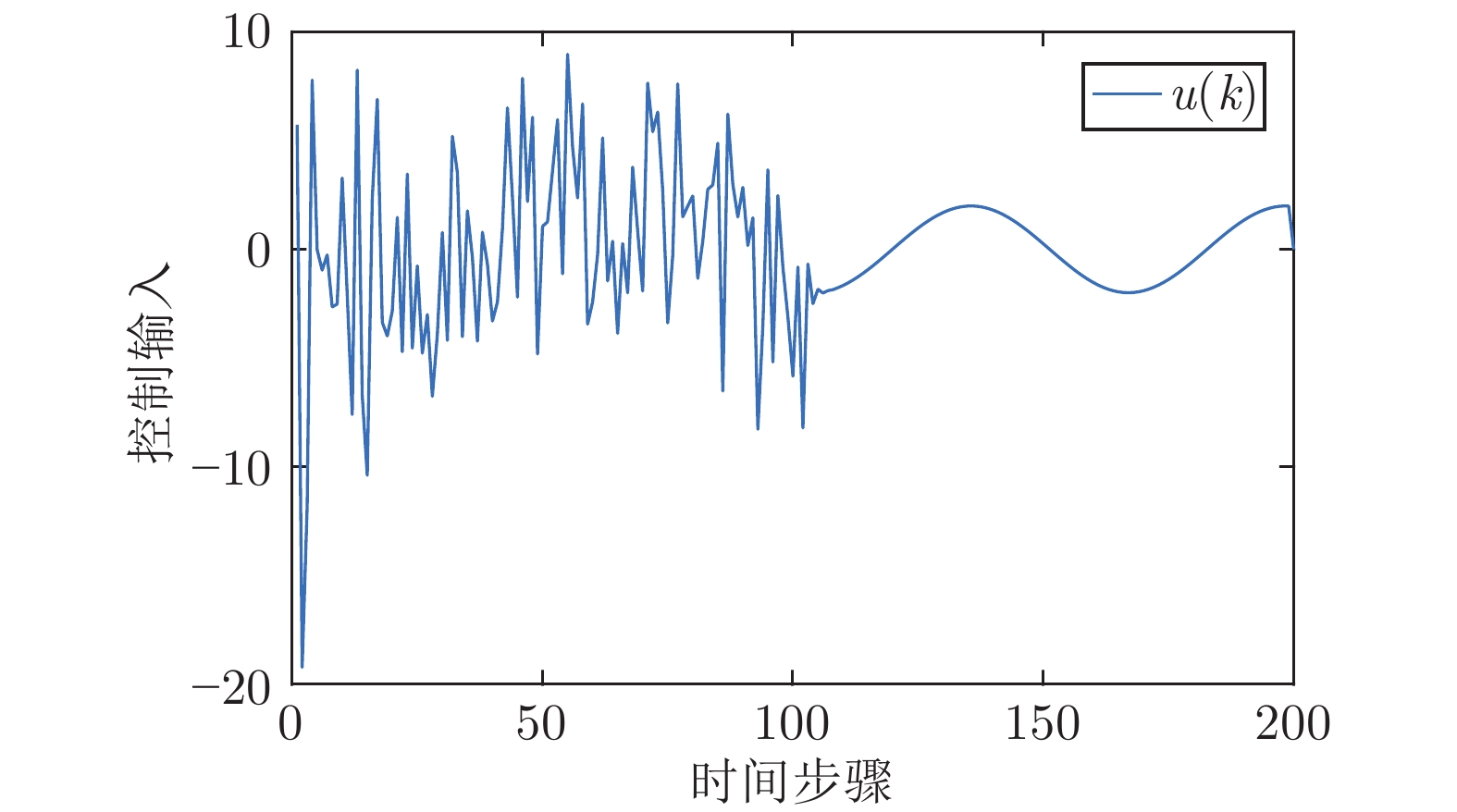
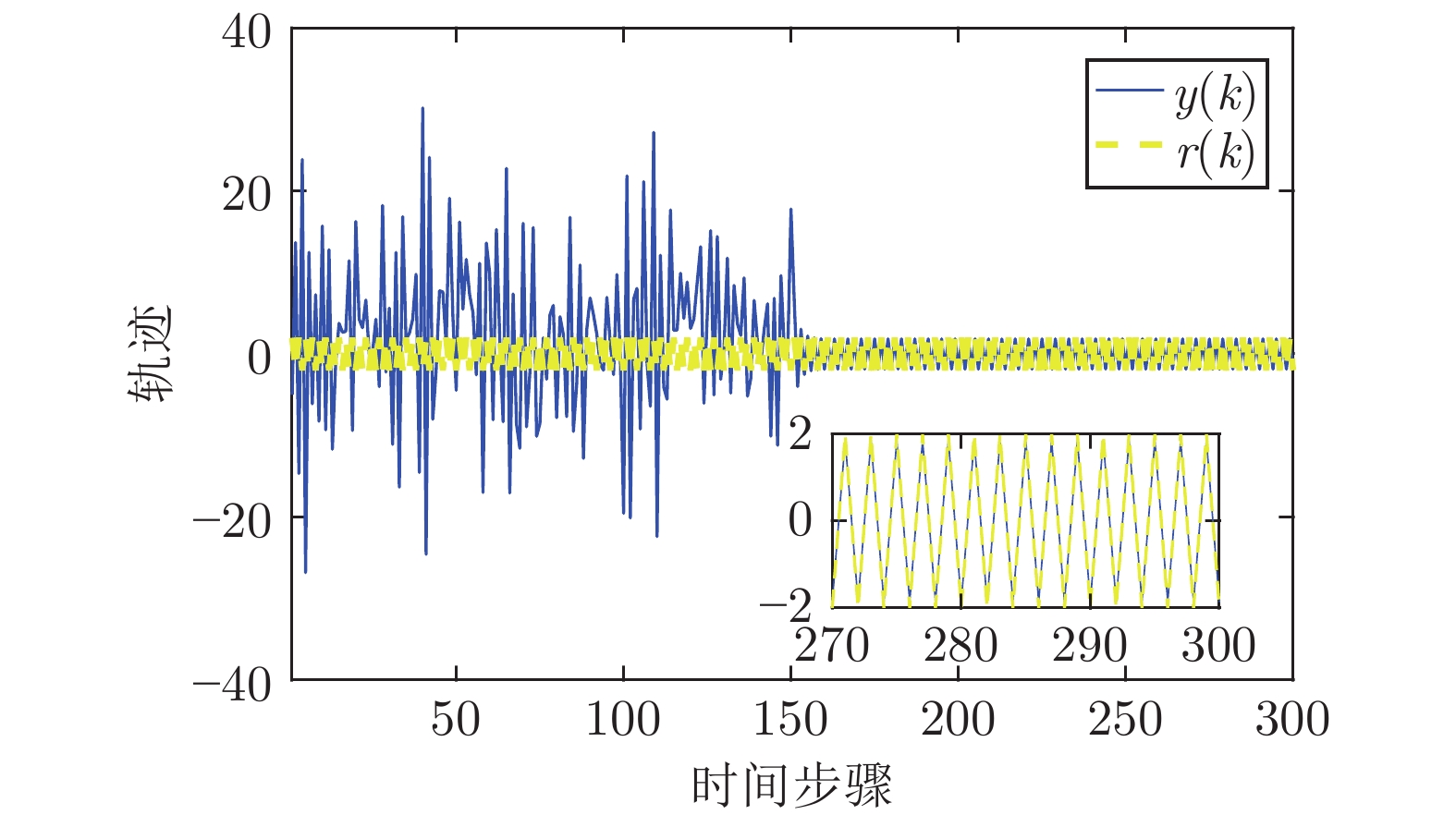
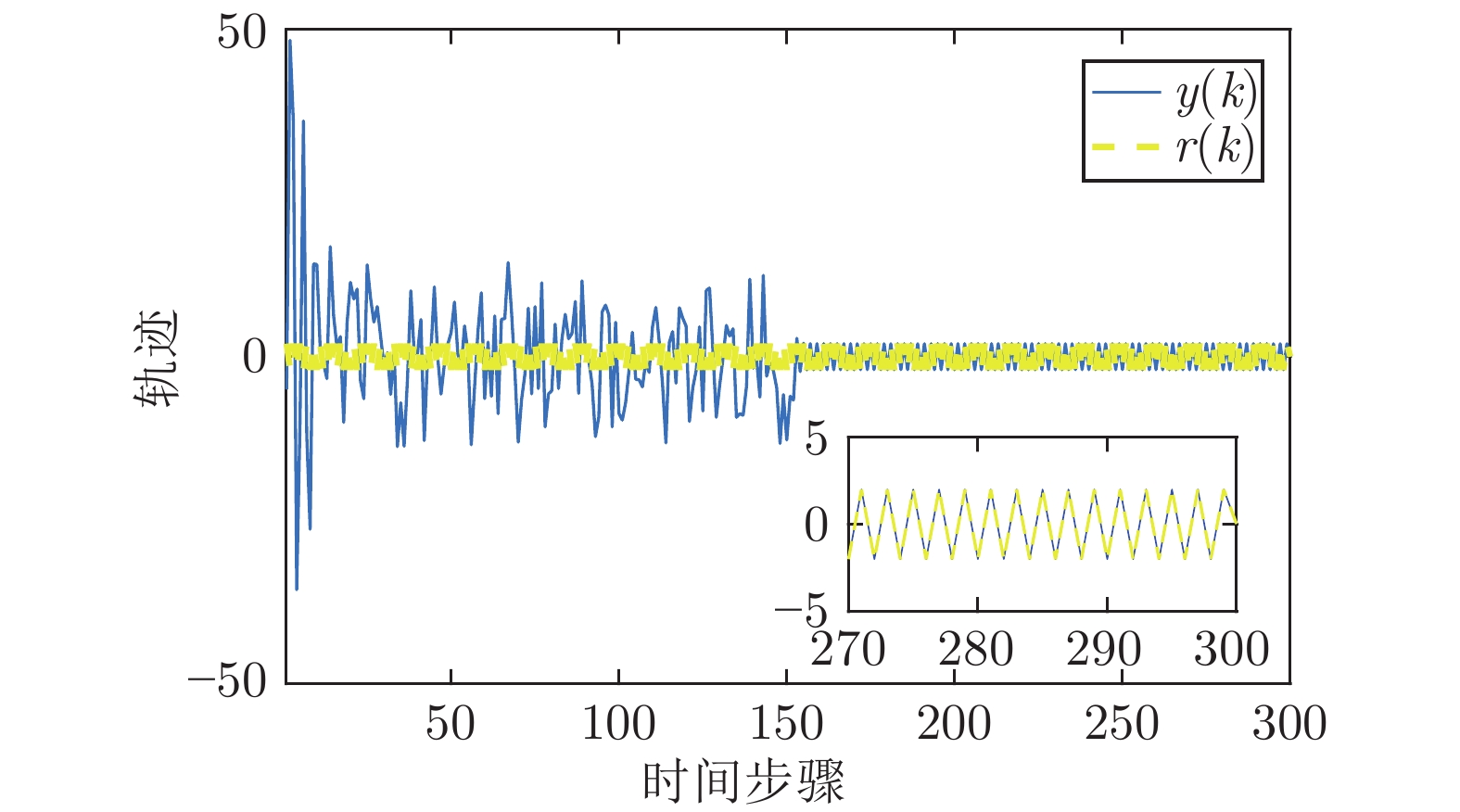
针对同时具有线性外部干扰与非线性不确定性下的离散时间部分线性系统的最优输出调节问题, 提出了仅利用在线数据的基于强化学习的数据驱动控制方法. 首先, 该问题可拆分为一个受约束的静态优化问题和一个动态规划问题, 第一个问题可以解出调节器方程的解. 第二个问题可以确定出控制器的最优反馈增益. 然后, 运用小增益定理证明了存在非线性不确定性离散时间部分线性系统的最优输出调节问题的稳定性. 针对传统的控制方法需要准确的系统模型参数用来解决这两个优化问题, 提出了一种数据驱动离线策略更新算法, 该算法仅使用在线数据找到动态规划问题的解. 然后, 基于动态规划问题的解, 利用在线数据为静态优化问题提供了最优解. 最后, 仿真结果验证了该方法的有效性.
针对同时具有线性外部干扰与非线性不确定性下的离散时间部分线性系统的最优输出调节问题, 提出了仅利用在线数据的基于强化学习的数据驱动控制方法. 首先, 该问题可拆分为一个受约束的静态优化问题和一个动态规划问题, 第一个问题可以解出调节器方程的解. 第二个问题可以确定出控制器的最优反馈增益. 然后, 运用小增益定理证明了存在非线性不确定性离散时间部分线性系统的最优输出调节问题的稳定性. 针对传统的控制方法需要准确的系统模型参数用来解决这两个优化问题, 提出了一种数据驱动离线策略更新算法, 该算法仅使用在线数据找到动态规划问题的解. 然后, 基于动态规划问题的解, 利用在线数据为静态优化问题提供了最优解. 最后, 仿真结果验证了该方法的有效性.


2022, 48(9): 2254-2264.
doi: 10.16383/j.aas.c190416
摘要:
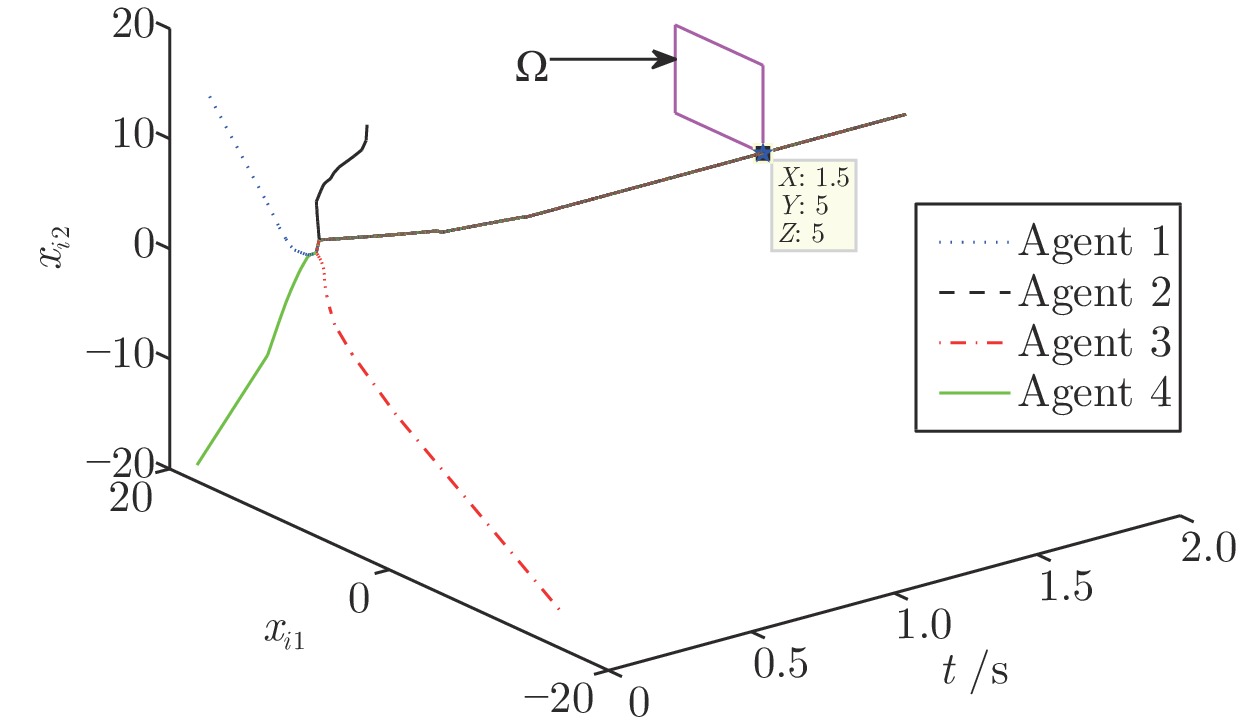
本文研究一类具有状态约束的多智能体系统优化控制问题, 提出了一种具有固定时间收敛特性的分布式优化控制算法. 该控制算法由局部投影模块、一致性模块和梯度模块构成, 其中局部投影模块确保智能体的状态在固定时间内收敛到局部约束集合, 基于时变增益的一致性模块实现所有智能体的状态在固定时间内收敛到一致值, 基于时变增益的梯度模块实现智能体的状态在固定时间内收敛到最优解. 利用凸优化理论和固定时间李雅普诺夫理论, 分析了算法的固定时间收敛特性. 算法收敛时间的上界值不依赖系统的初始条件, 因而可以根据任务需求来预先设计收敛时间. 最后通过数值仿真验证了理论结果的有效性.
本文研究一类具有状态约束的多智能体系统优化控制问题, 提出了一种具有固定时间收敛特性的分布式优化控制算法. 该控制算法由局部投影模块、一致性模块和梯度模块构成, 其中局部投影模块确保智能体的状态在固定时间内收敛到局部约束集合, 基于时变增益的一致性模块实现所有智能体的状态在固定时间内收敛到一致值, 基于时变增益的梯度模块实现智能体的状态在固定时间内收敛到最优解. 利用凸优化理论和固定时间李雅普诺夫理论, 分析了算法的固定时间收敛特性. 算法收敛时间的上界值不依赖系统的初始条件, 因而可以根据任务需求来预先设计收敛时间. 最后通过数值仿真验证了理论结果的有效性.


2022, 48(9): 2265-2276.
doi: 10.16383/j.aas.c190753
摘要:
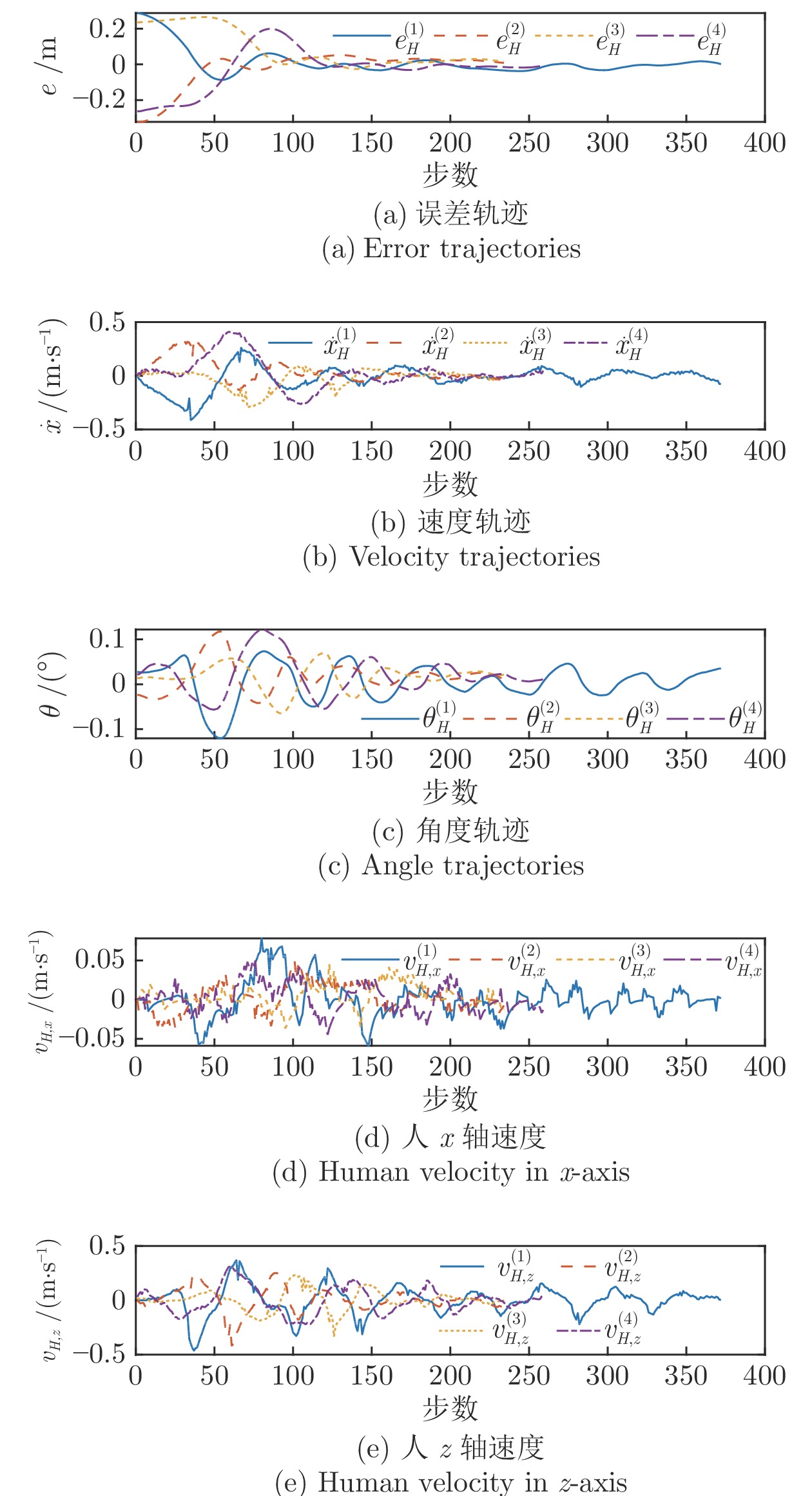
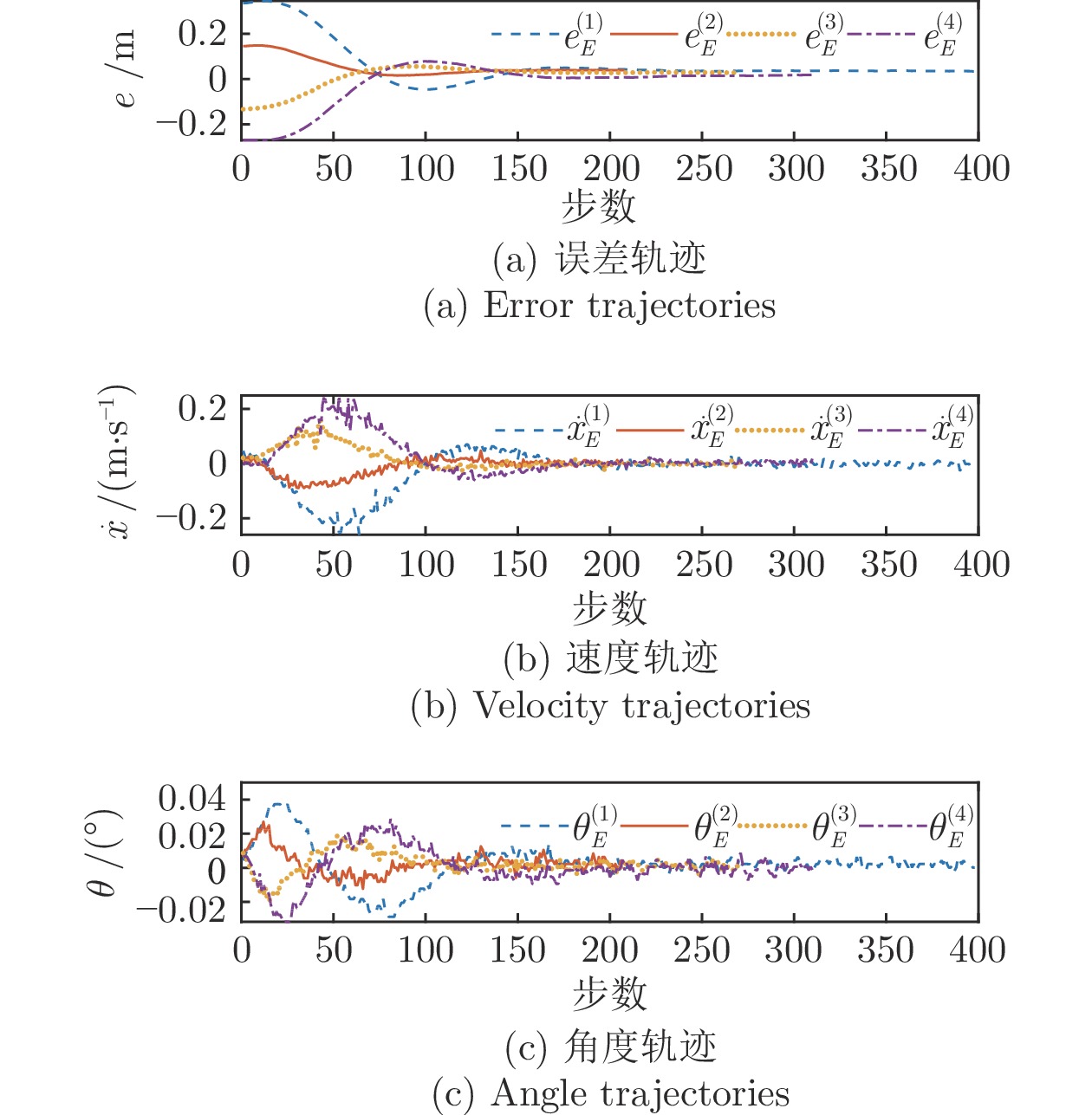
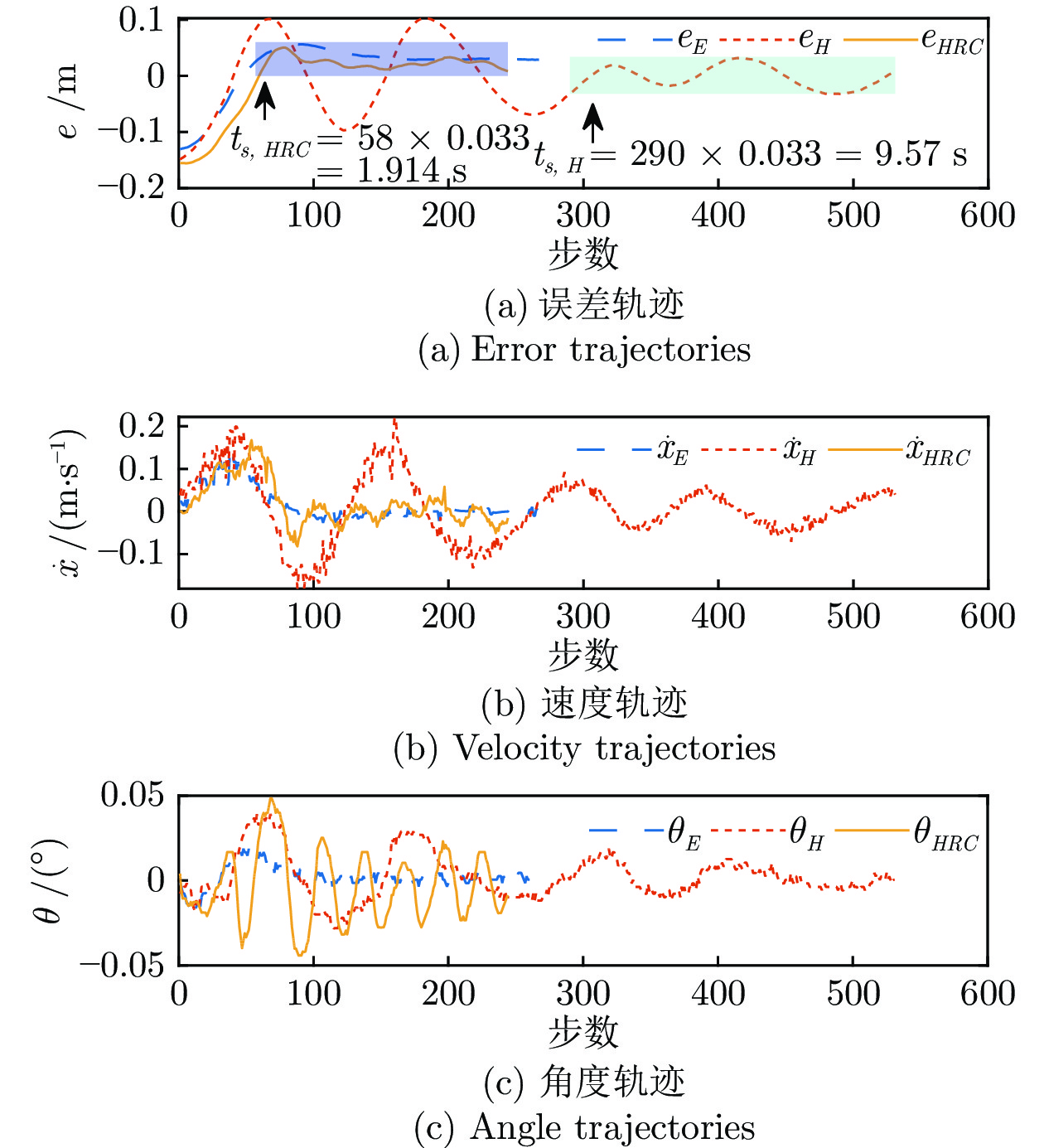
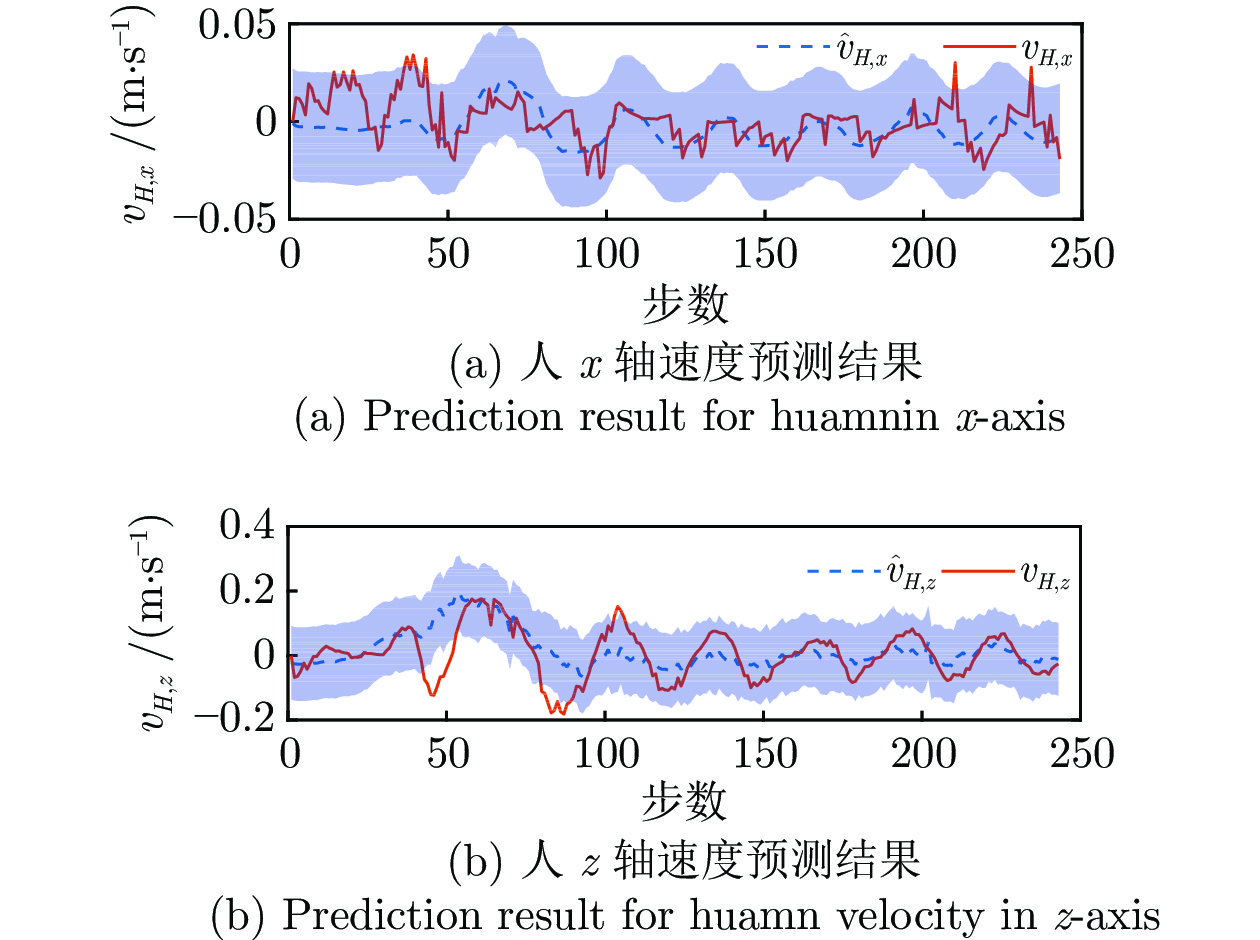
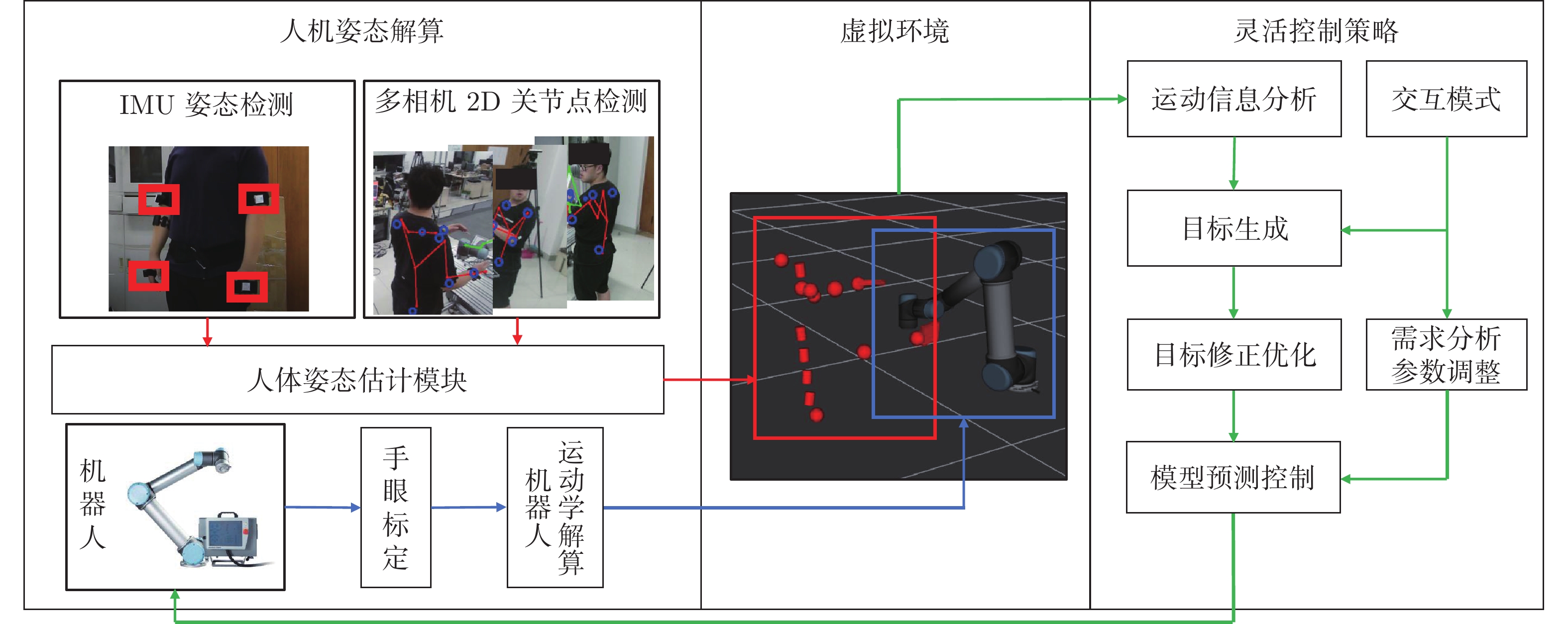
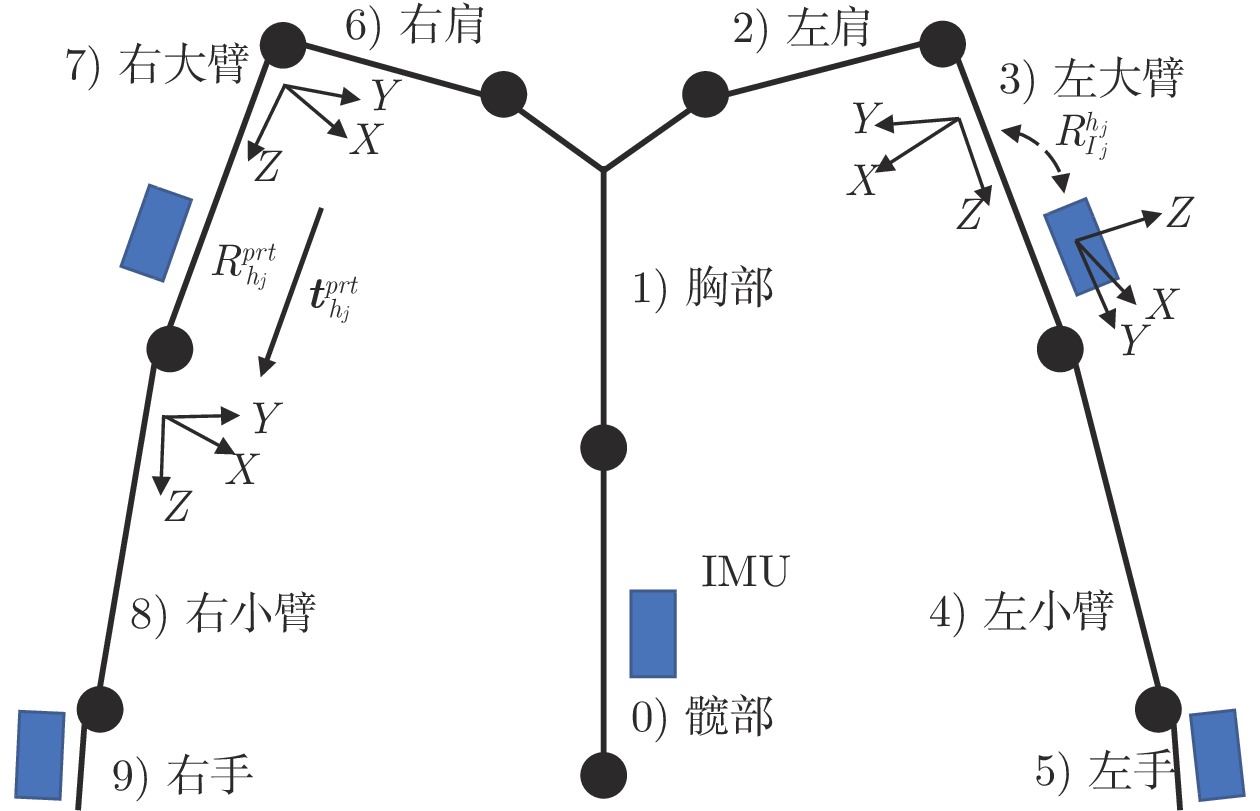
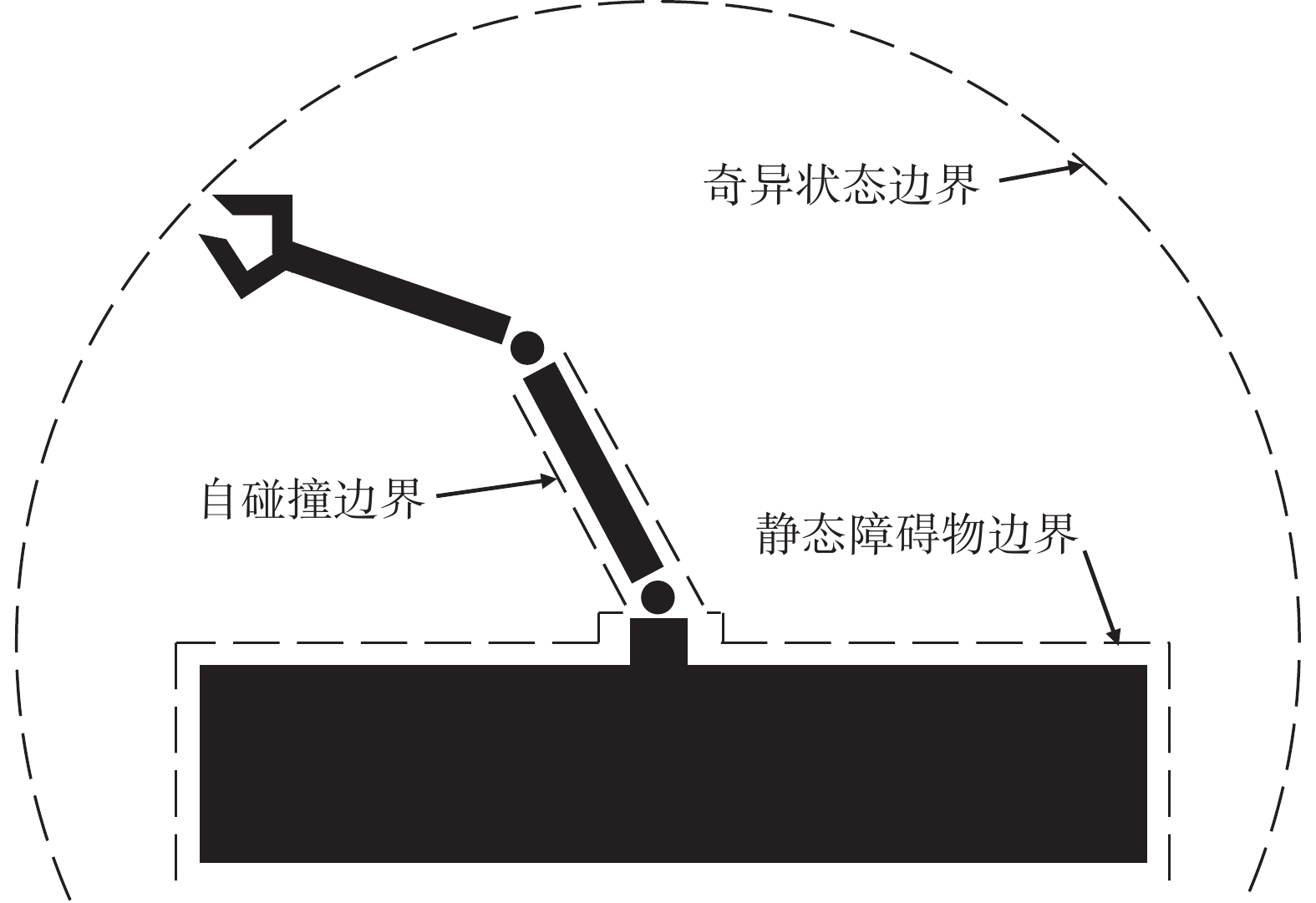
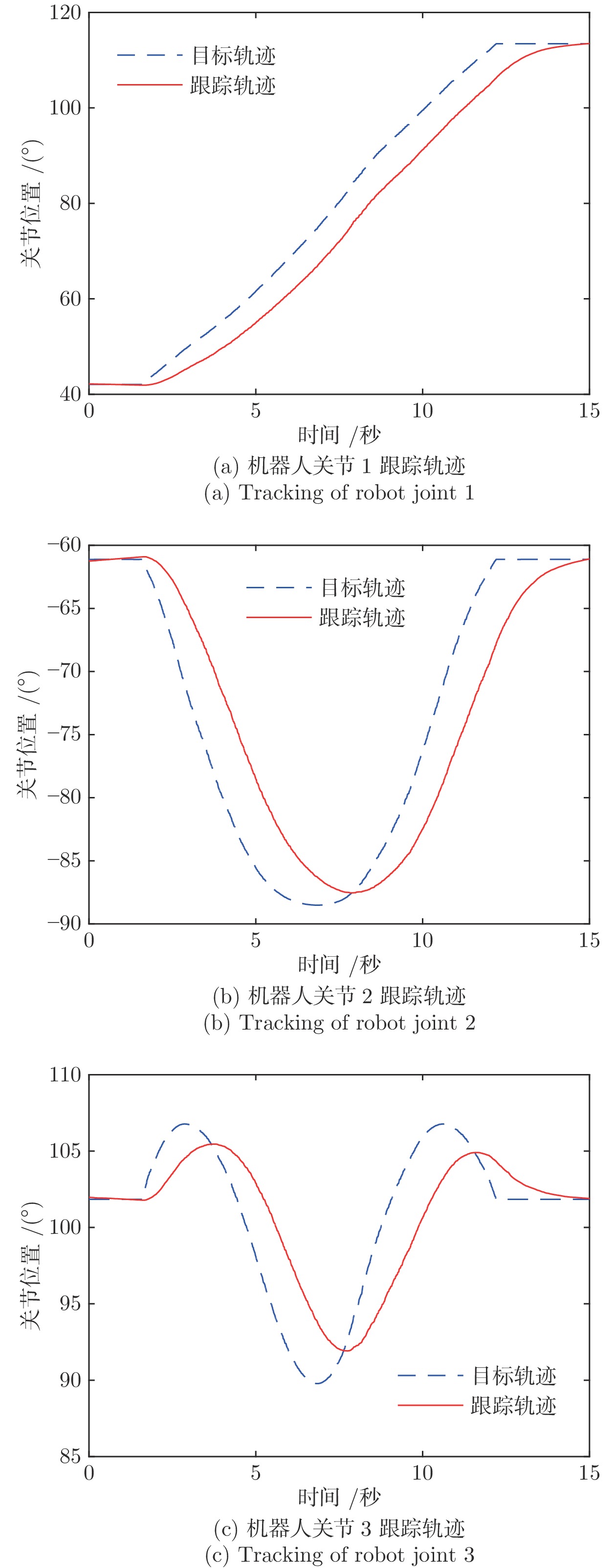
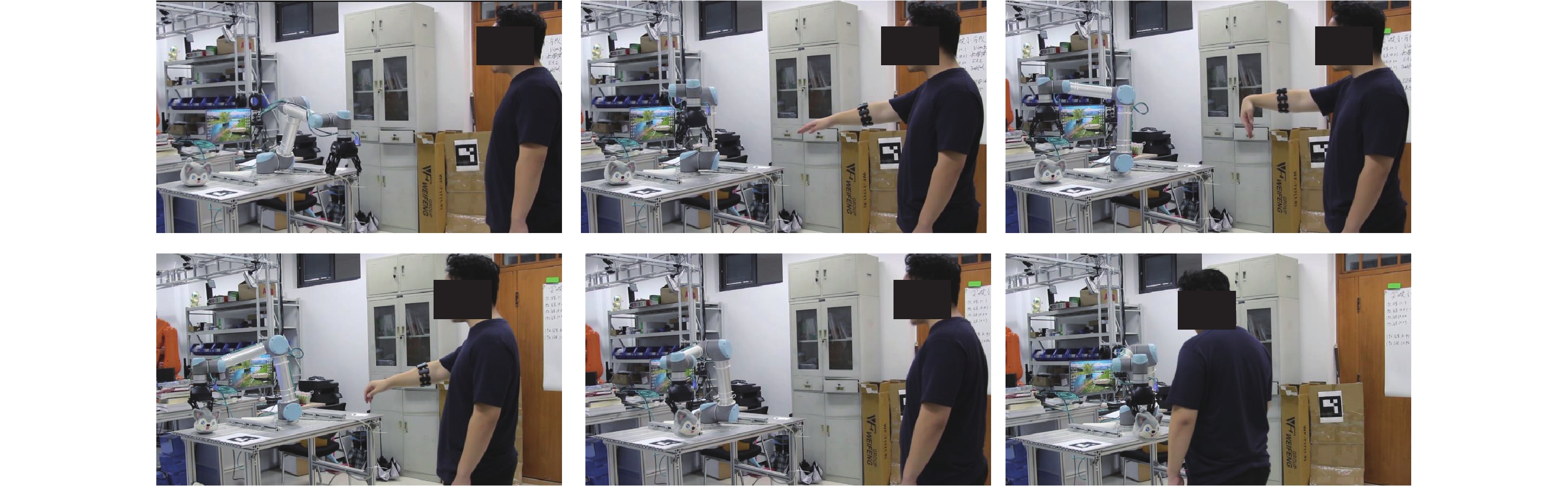
人与机器人共同协作的灵活生产模式已经成为工业成产的迫切需求, 因此, 近年来人机共融系统方面的研究受到了越来越多关注. 设计并实现了一种满足不同交互任务的人机共融系统, 人体动作的估计和机器人的交互控制是其中的关键技术. 首先, 提出了一种基于多相机和惯性测量单元信息融合的人体姿态解算方法, 通过构造优化问题, 融合多相机下的2D关节检测信息和所佩戴的惯性测量单元测量信息, 对人体运动学姿态进行优化估计, 改善了单一传感器下, 姿态信息不全面以及对噪声敏感的问题, 提升了姿态估计的准确度. 其次, 结合机器人的运动学特性和人机交互的特点, 设计了基于目标点跟踪和模型预测控制的机器人控制策略, 使得机器人能够通过调整控制参数, 适应动态的环境和不同的交互需求, 同时保证机器人和操作人员的安全. 最后, 进行了动作跟随、物品传递、主动避障等人机交互实验, 实验结果表明了所设计的机器人交互系统在人机共融环境下的有效性和可靠性.
人与机器人共同协作的灵活生产模式已经成为工业成产的迫切需求, 因此, 近年来人机共融系统方面的研究受到了越来越多关注. 设计并实现了一种满足不同交互任务的人机共融系统, 人体动作的估计和机器人的交互控制是其中的关键技术. 首先, 提出了一种基于多相机和惯性测量单元信息融合的人体姿态解算方法, 通过构造优化问题, 融合多相机下的2D关节检测信息和所佩戴的惯性测量单元测量信息, 对人体运动学姿态进行优化估计, 改善了单一传感器下, 姿态信息不全面以及对噪声敏感的问题, 提升了姿态估计的准确度. 其次, 结合机器人的运动学特性和人机交互的特点, 设计了基于目标点跟踪和模型预测控制的机器人控制策略, 使得机器人能够通过调整控制参数, 适应动态的环境和不同的交互需求, 同时保证机器人和操作人员的安全. 最后, 进行了动作跟随、物品传递、主动避障等人机交互实验, 实验结果表明了所设计的机器人交互系统在人机共融环境下的有效性和可靠性.







2022, 48(9): 2277-2287.
doi: 10.16383/j.aas.c190816
摘要:
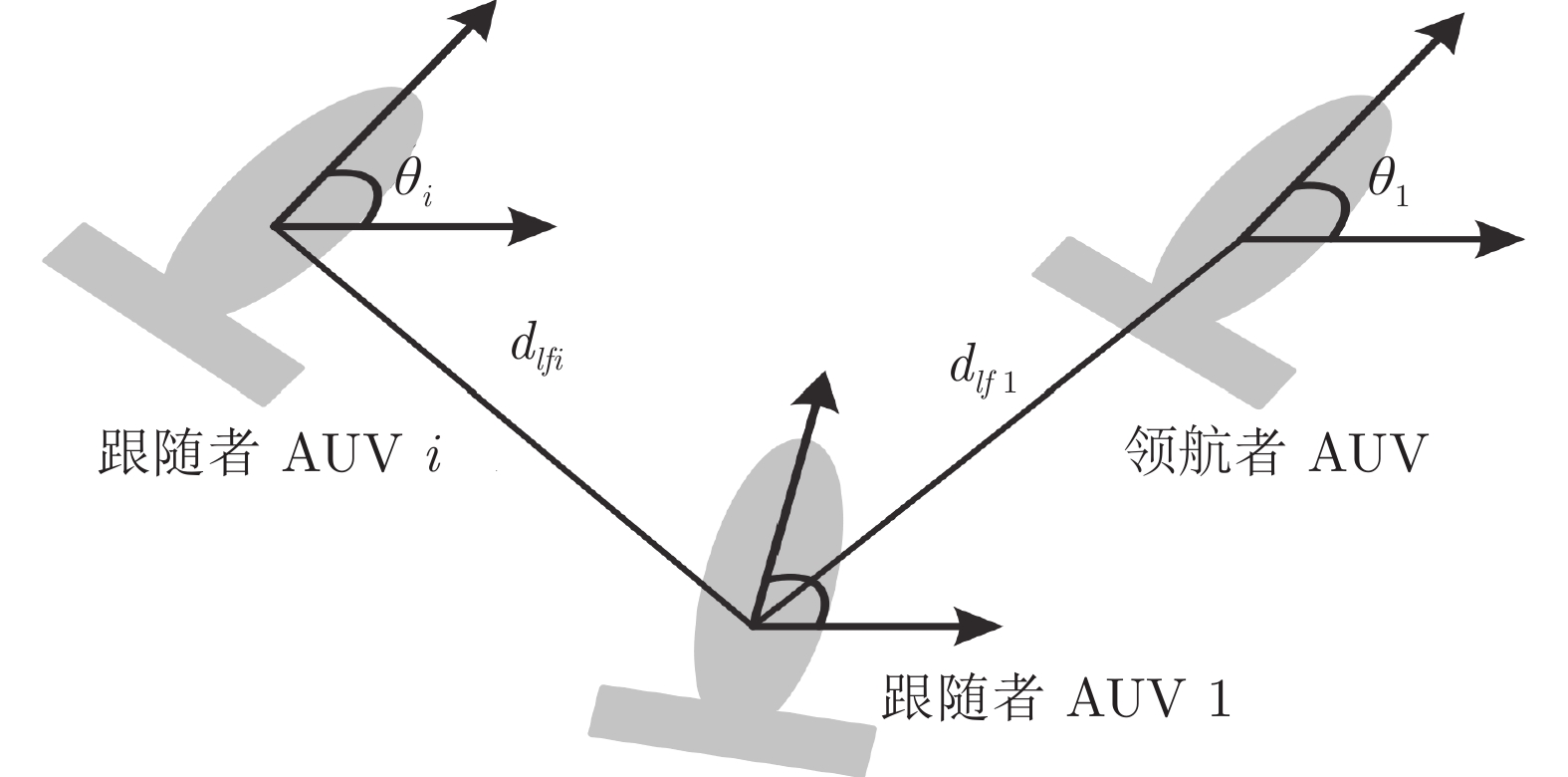
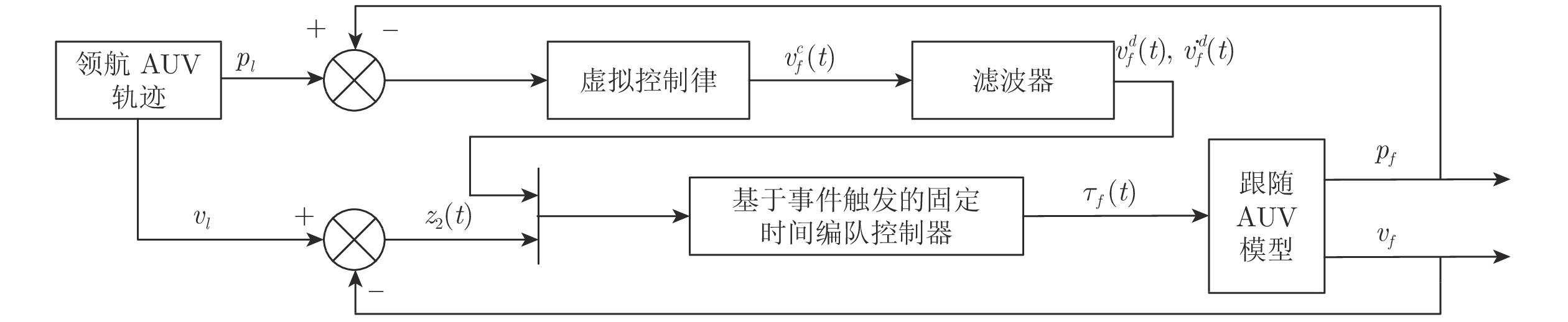
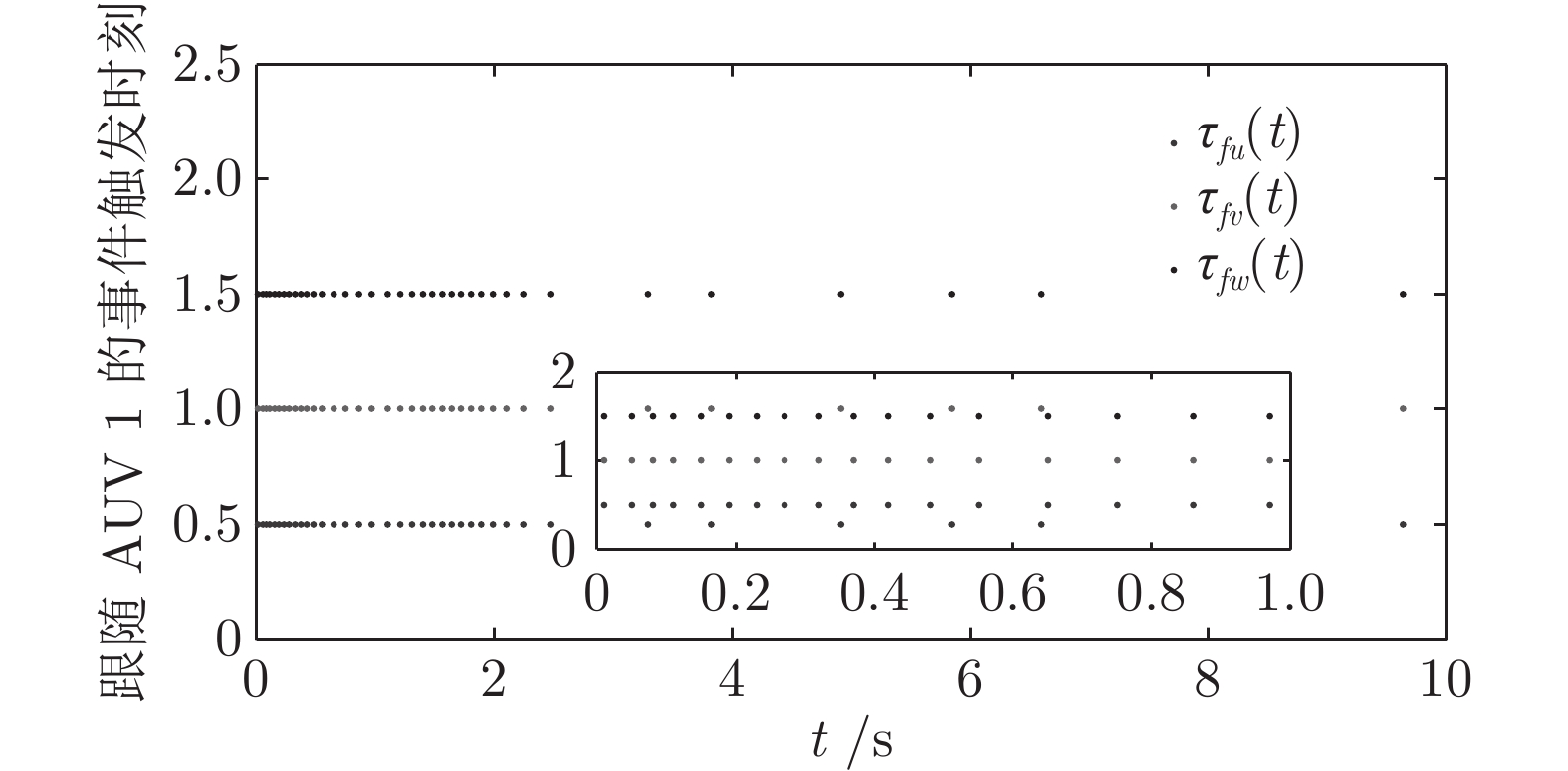
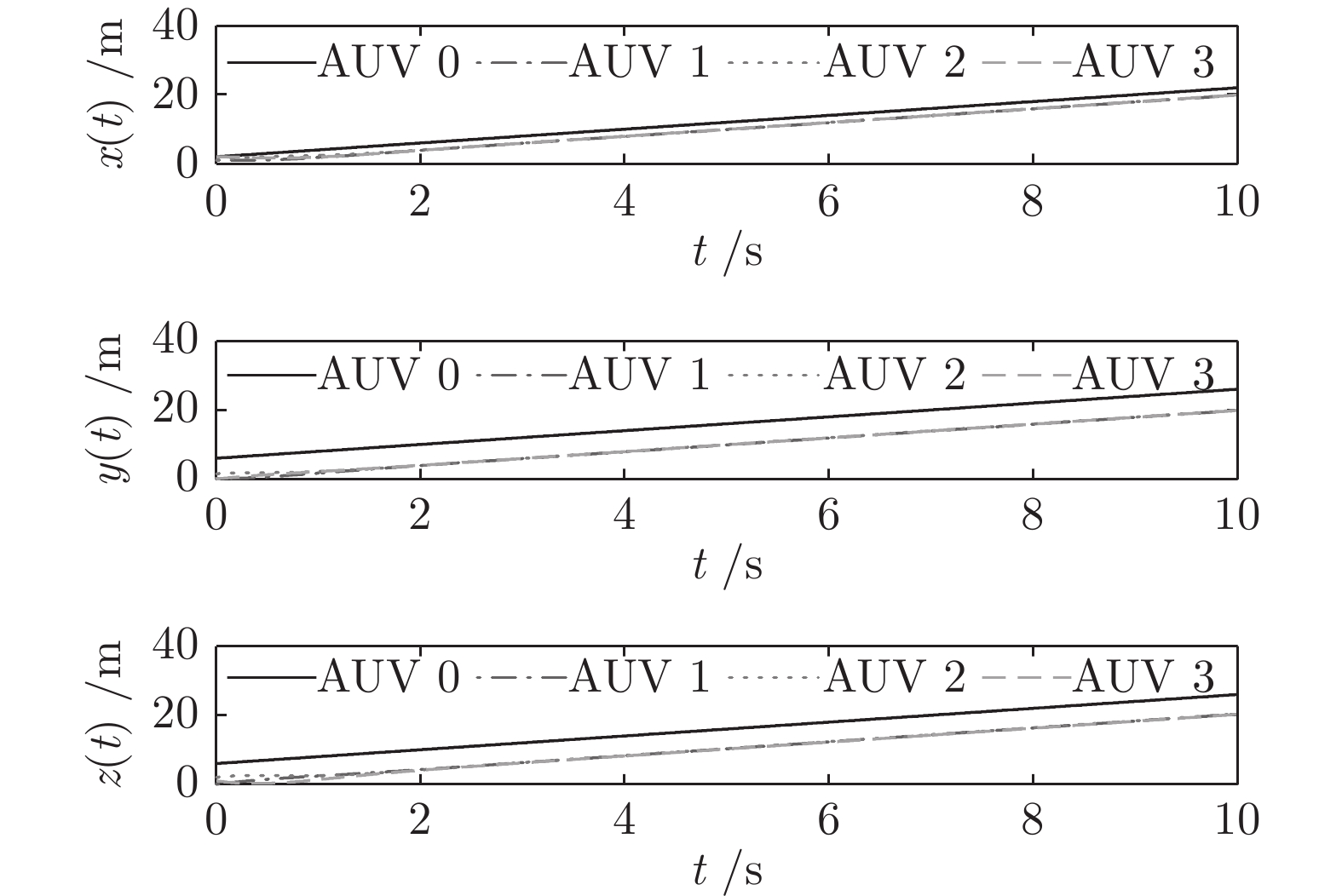
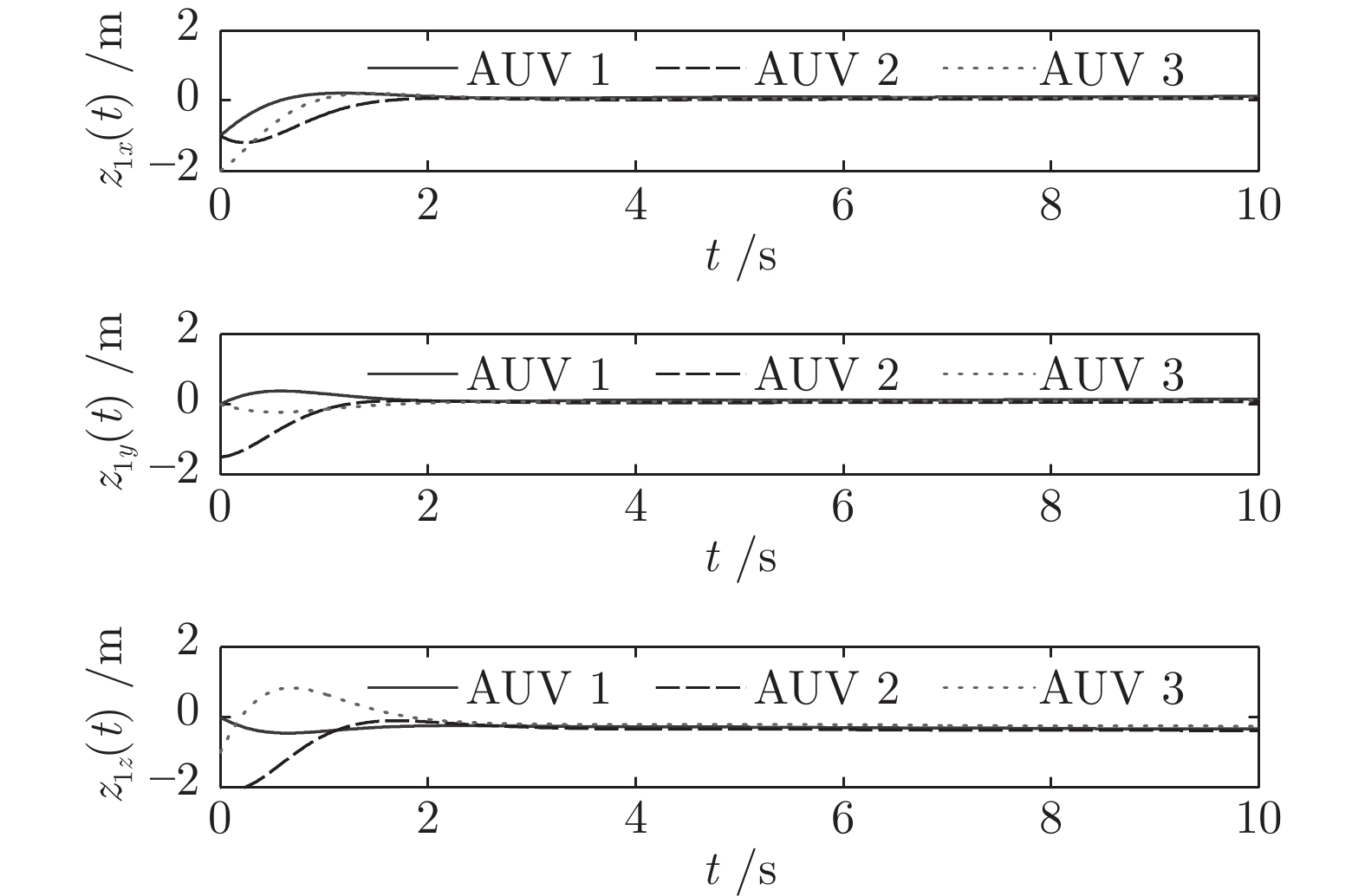
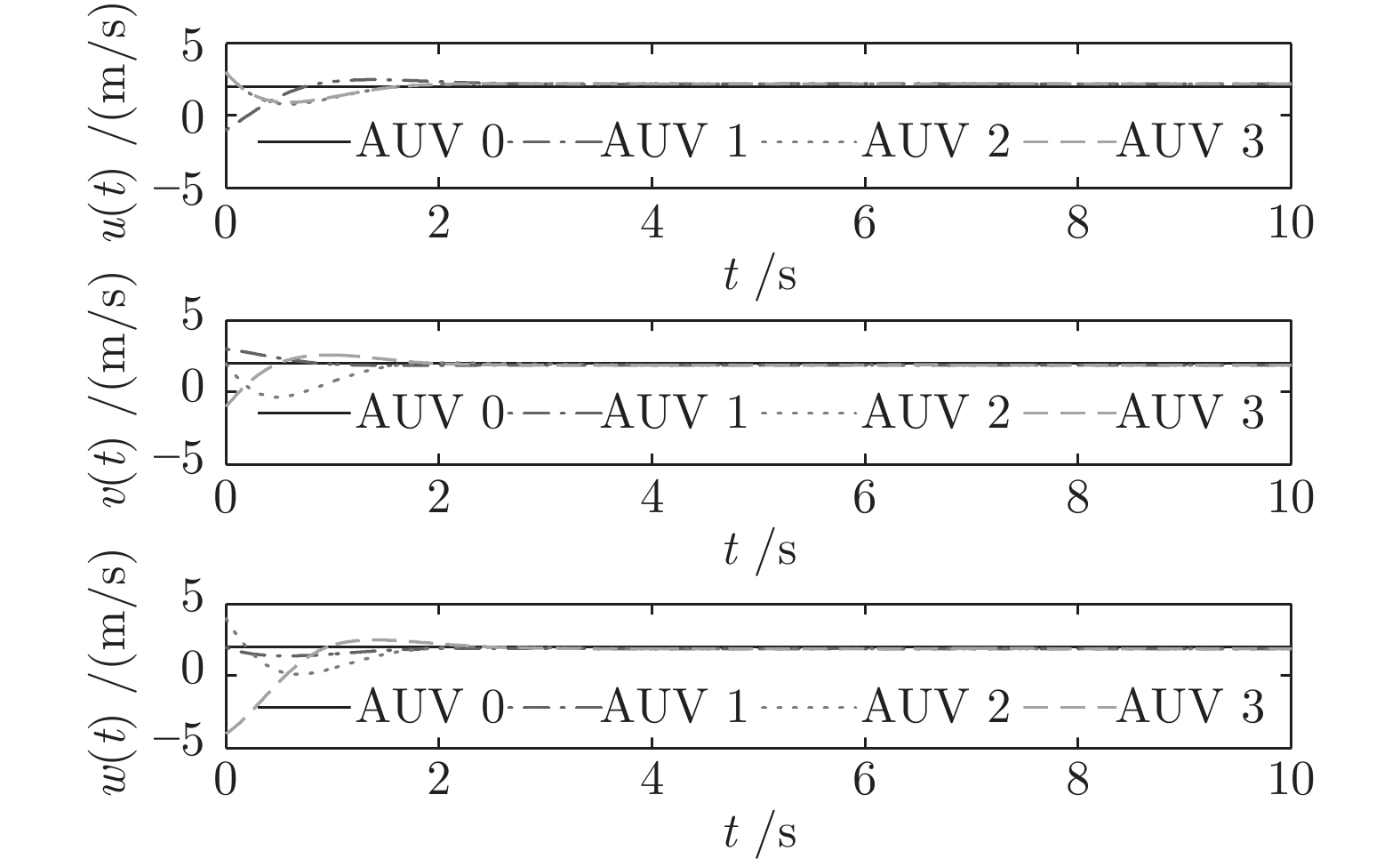
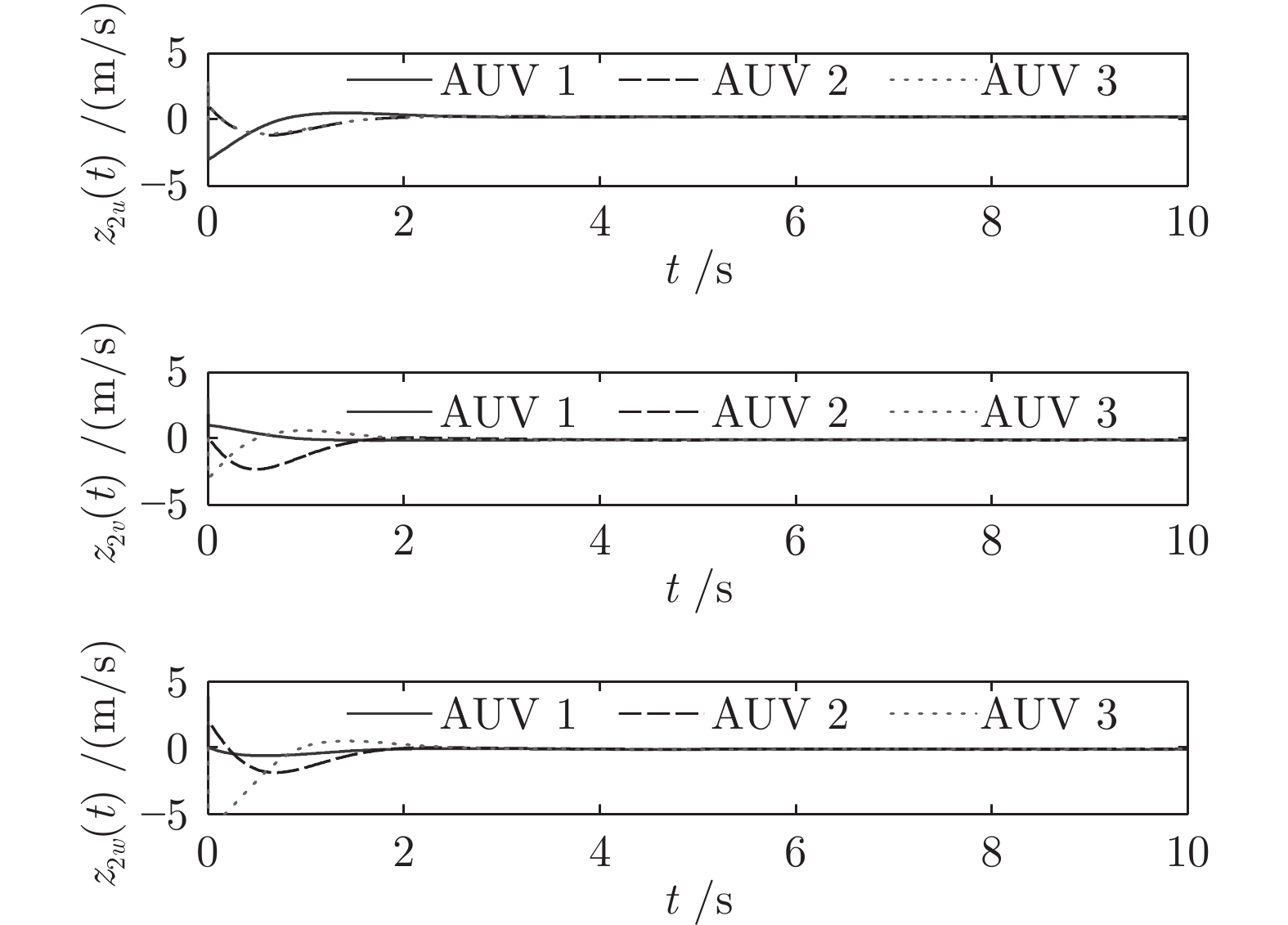
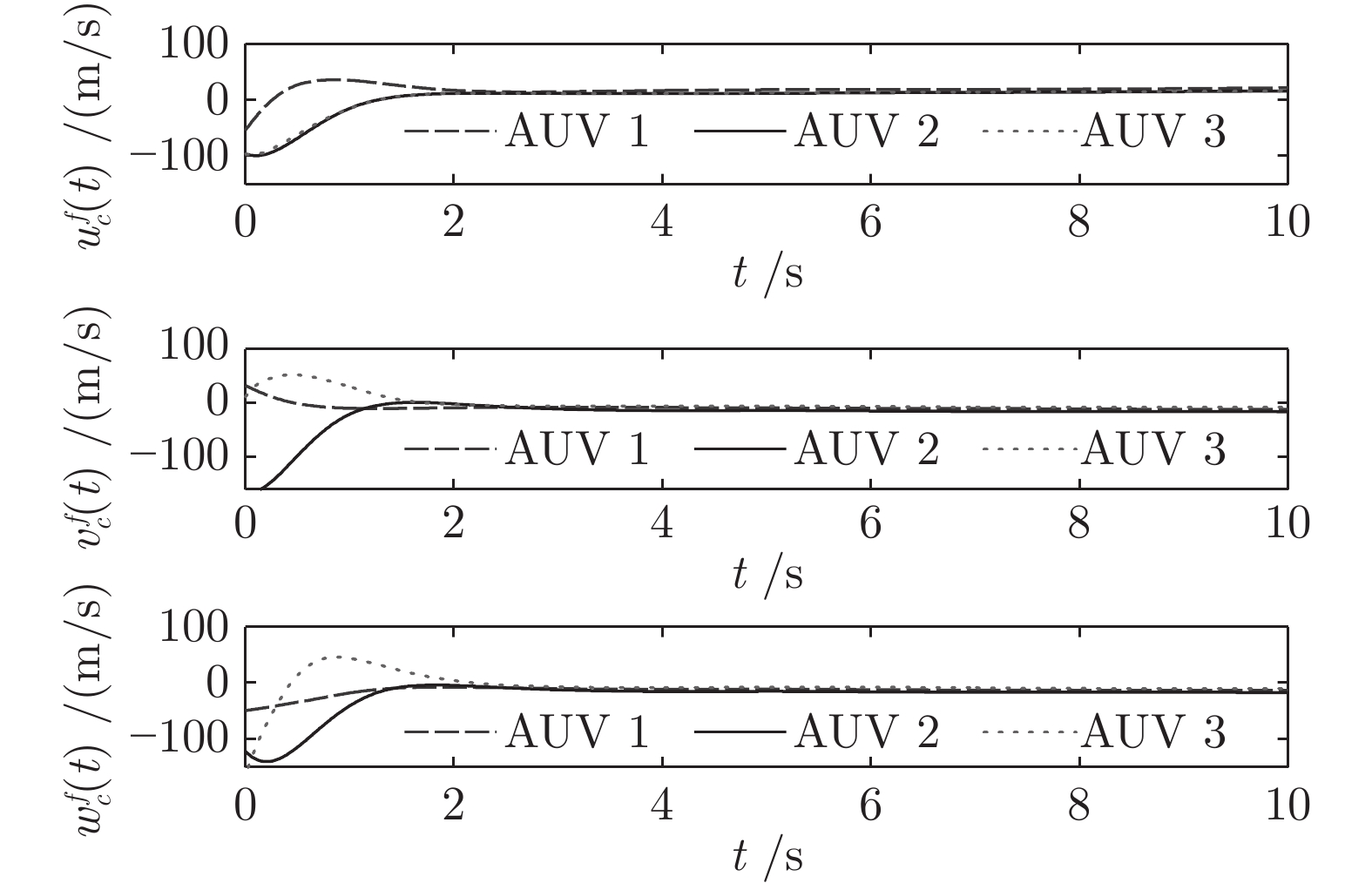
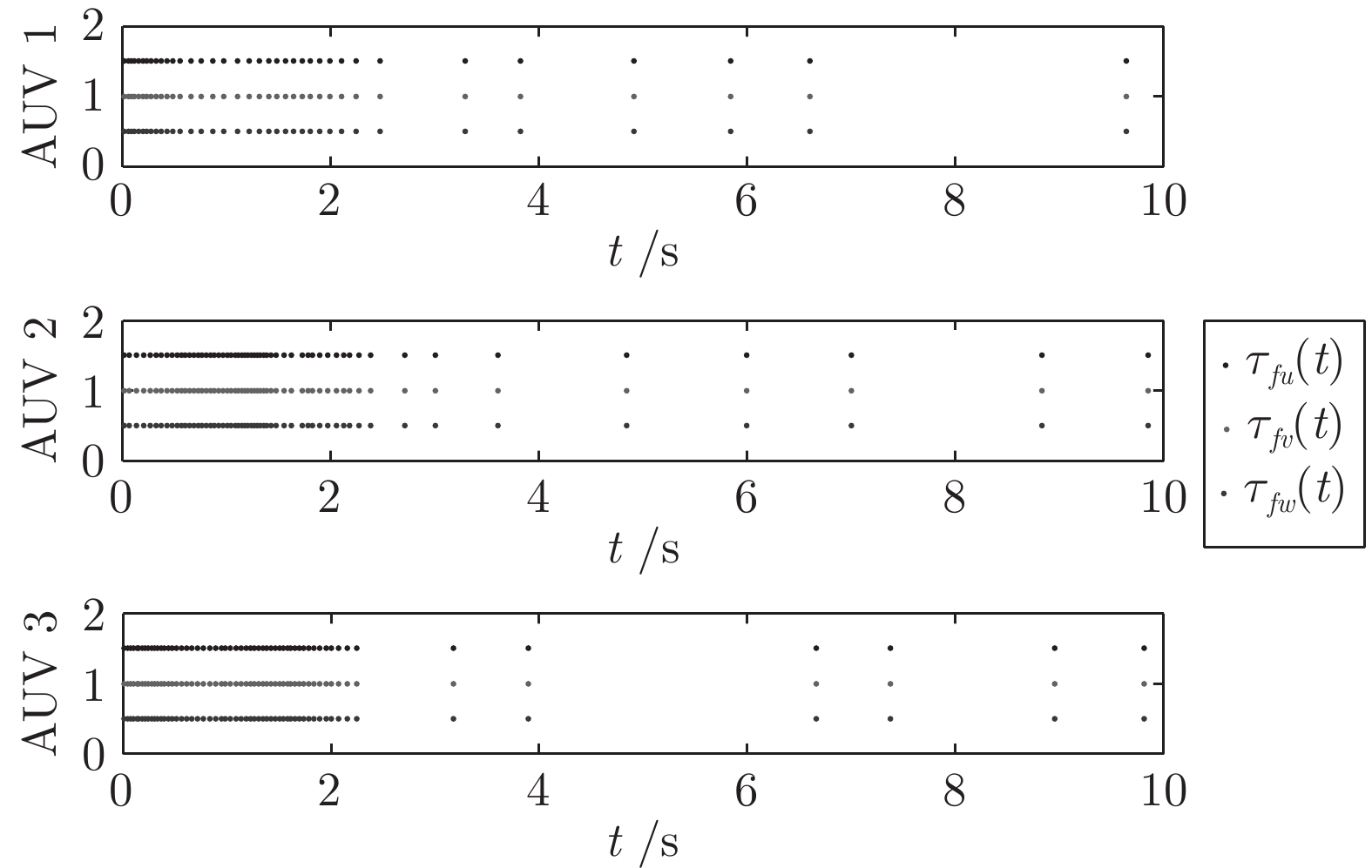
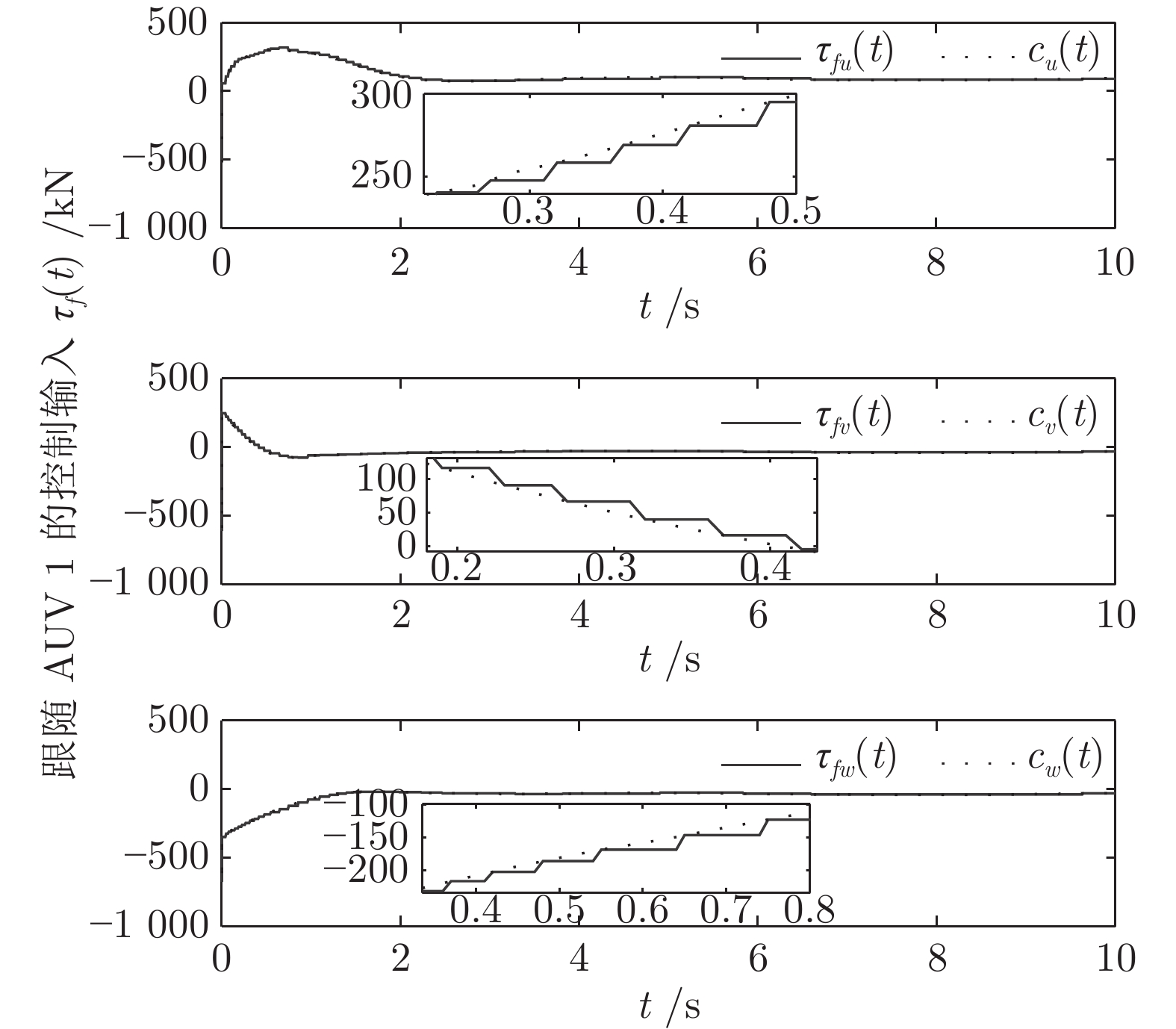
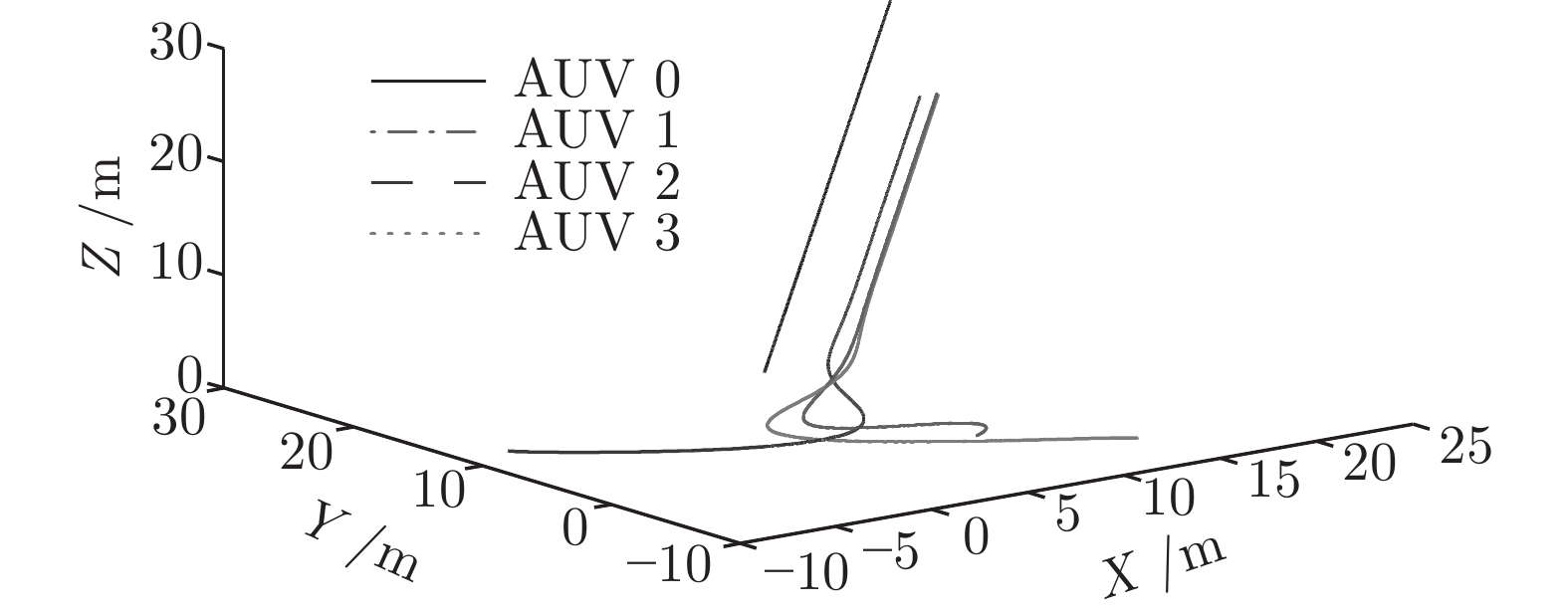
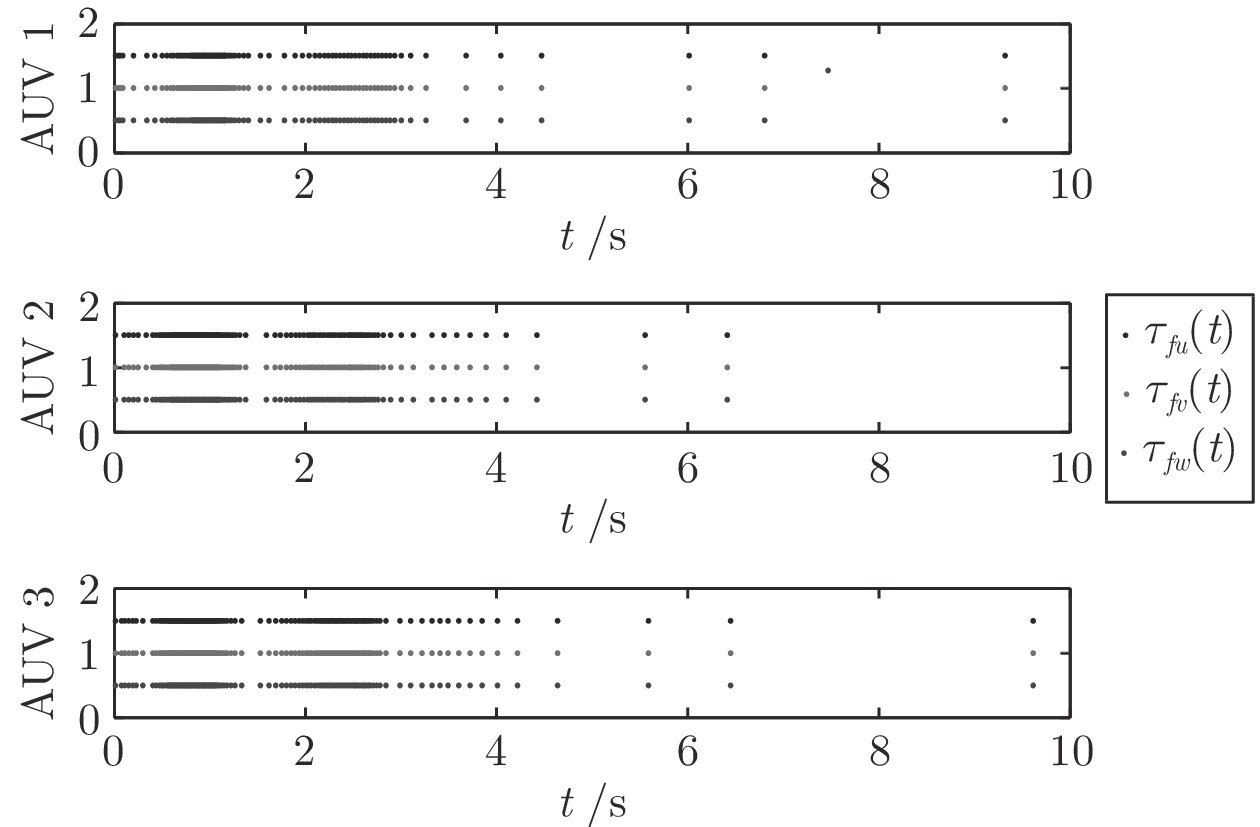
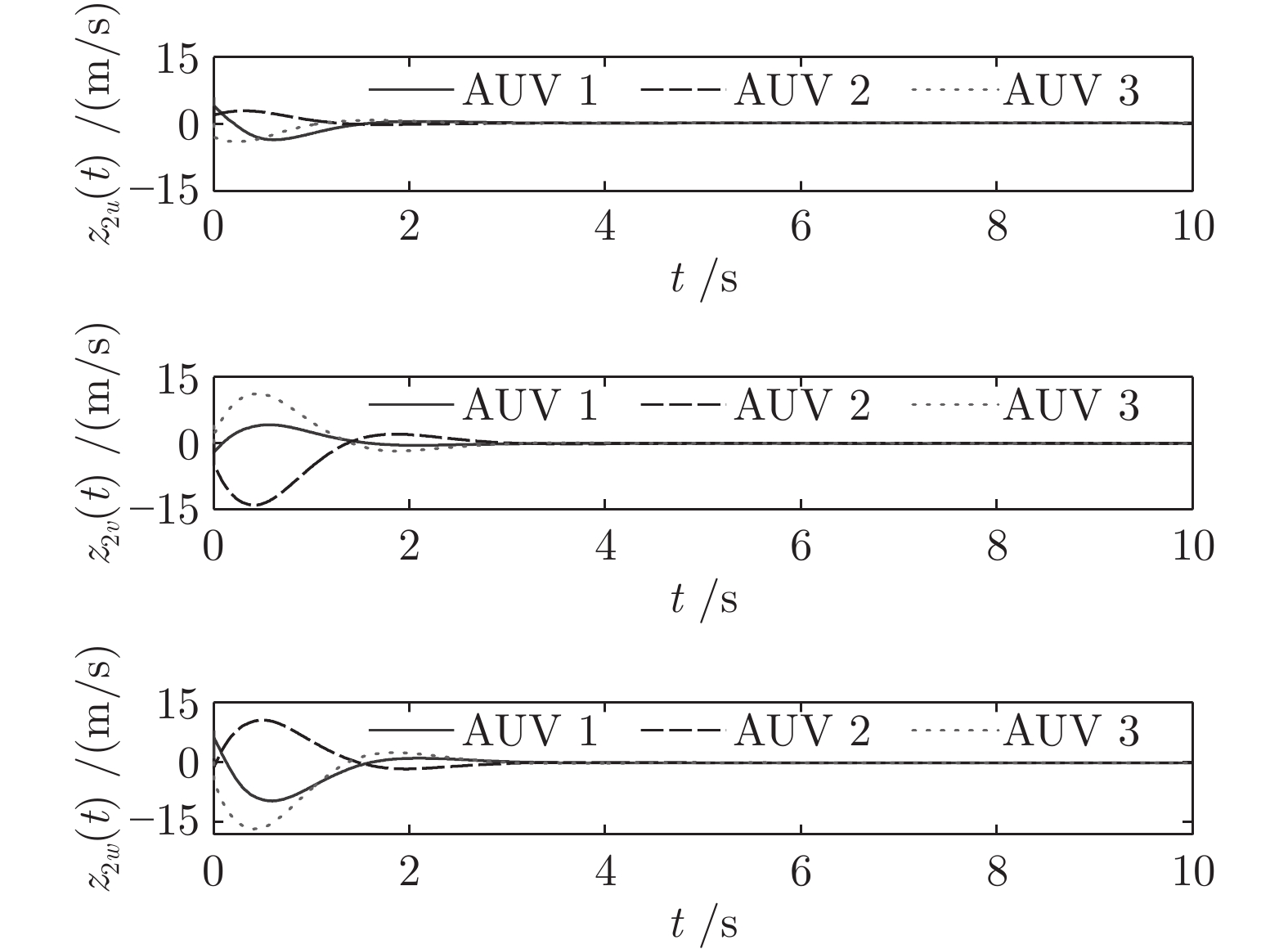
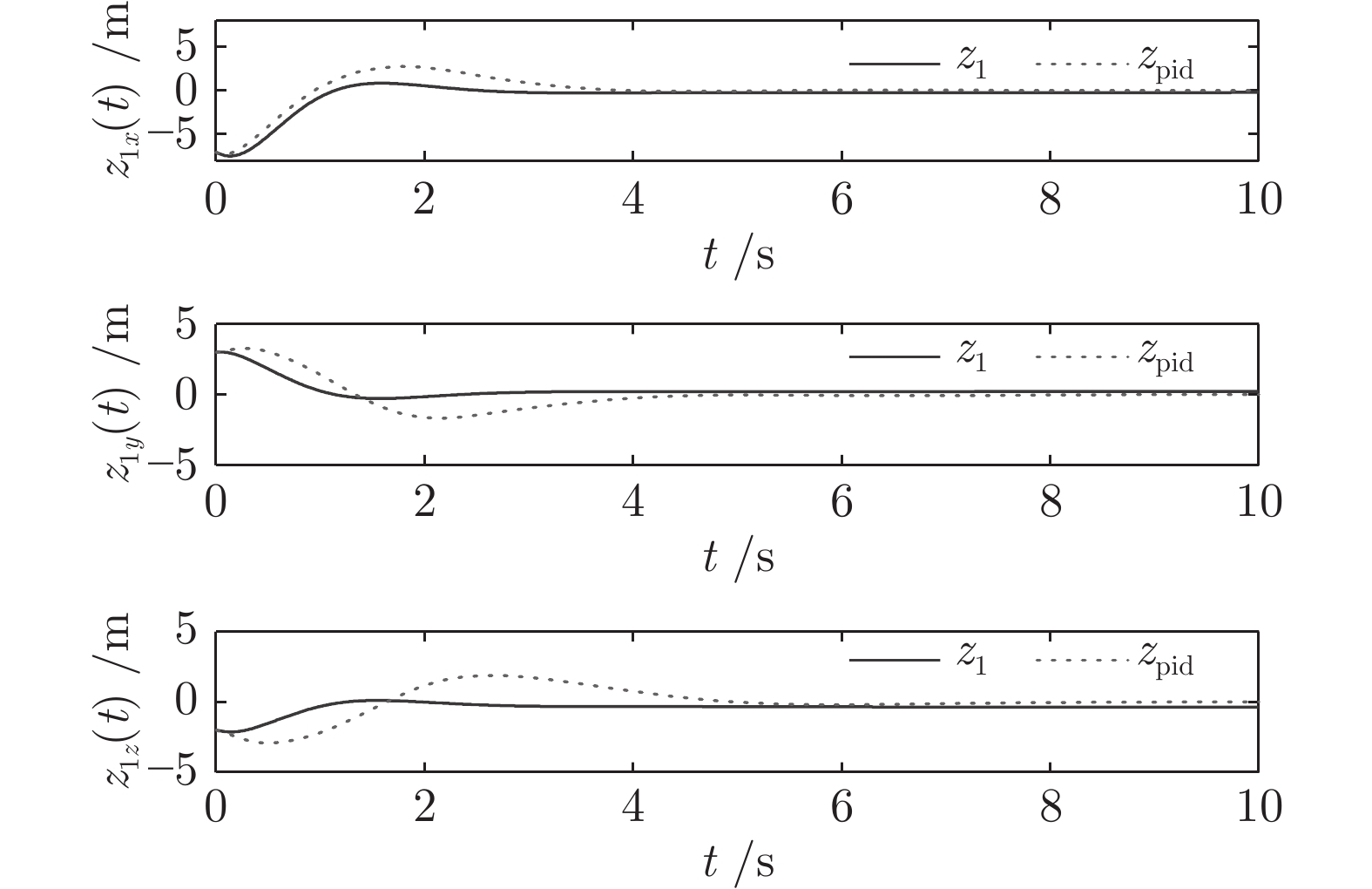
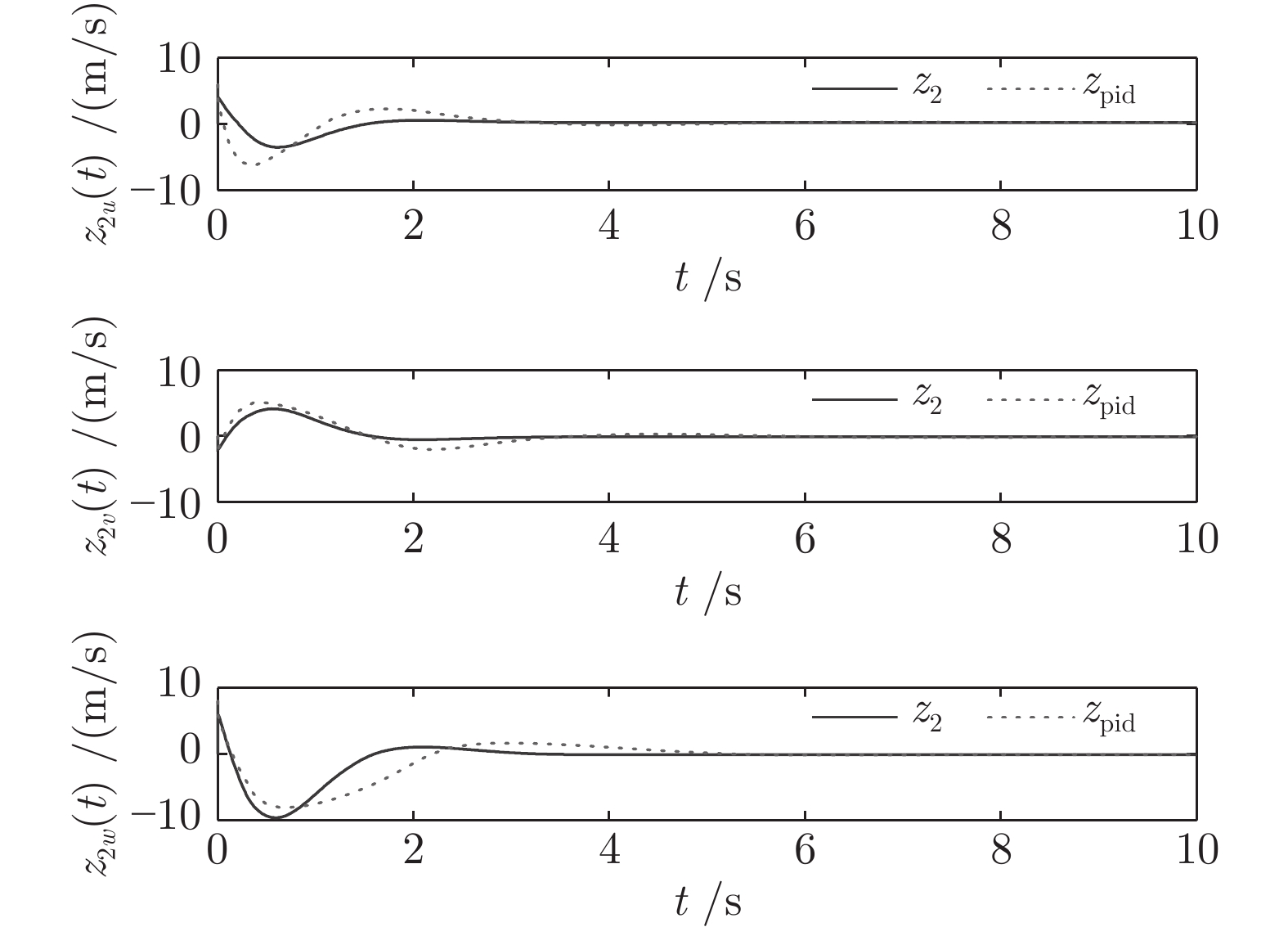
针对多自主水下航行器编队系统受限于有限的通信资源及收敛速度慢等问题, 提出一种基于事件触发的自主水下航行器固定时间领航−跟随编队控制方法. 首先, 将动态面控制算法与反步法结合, 消除“计算膨胀”问题; 其次, 为节约有限通信资源, 将事件触发通讯机制和固定时间理论引入多自主水下航行器编队控制中, 设计编队控制器, 实现编队系统的固定时间稳定, 且系统收敛时间与初始状态无关, 并通过理论证明无Zeno行为; 最后, 对4艘自主水下航行器的编队进行仿真实验, 验证算法的有效性.
针对多自主水下航行器编队系统受限于有限的通信资源及收敛速度慢等问题, 提出一种基于事件触发的自主水下航行器固定时间领航−跟随编队控制方法. 首先, 将动态面控制算法与反步法结合, 消除“计算膨胀”问题; 其次, 为节约有限通信资源, 将事件触发通讯机制和固定时间理论引入多自主水下航行器编队控制中, 设计编队控制器, 实现编队系统的固定时间稳定, 且系统收敛时间与初始状态无关, 并通过理论证明无Zeno行为; 最后, 对4艘自主水下航行器的编队进行仿真实验, 验证算法的有效性.




2022, 48(9): 2288-2300.
doi: 10.16383/j.aas.c190496
摘要:
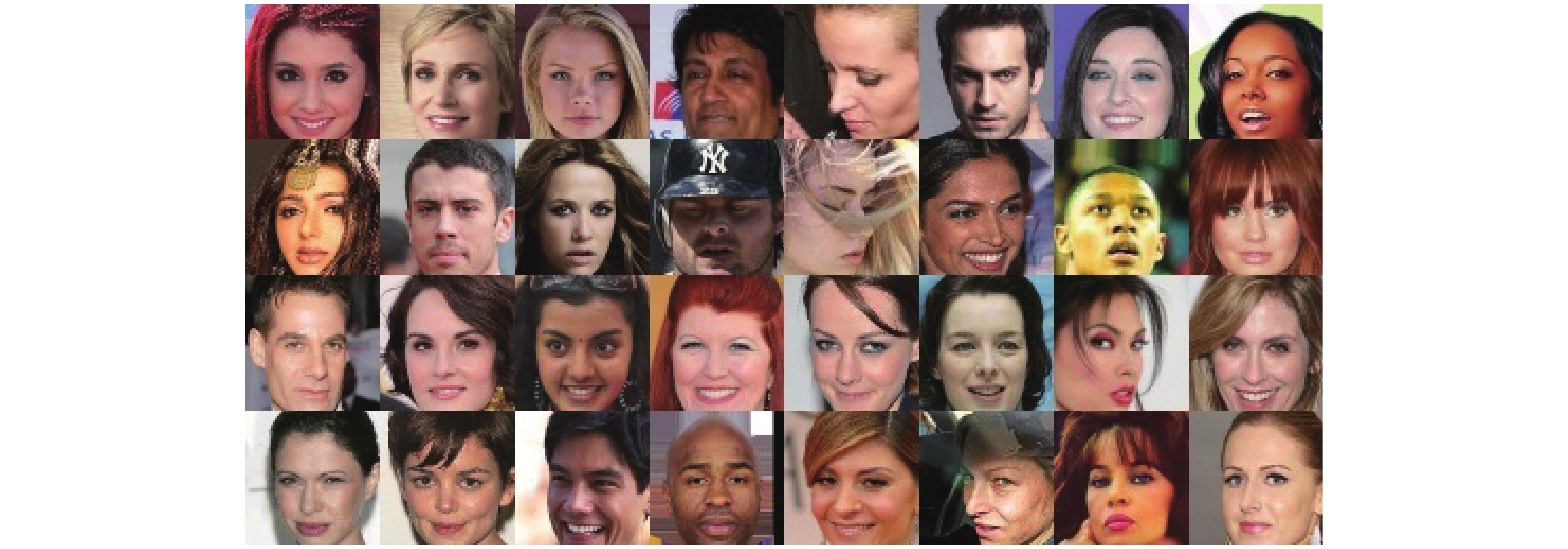
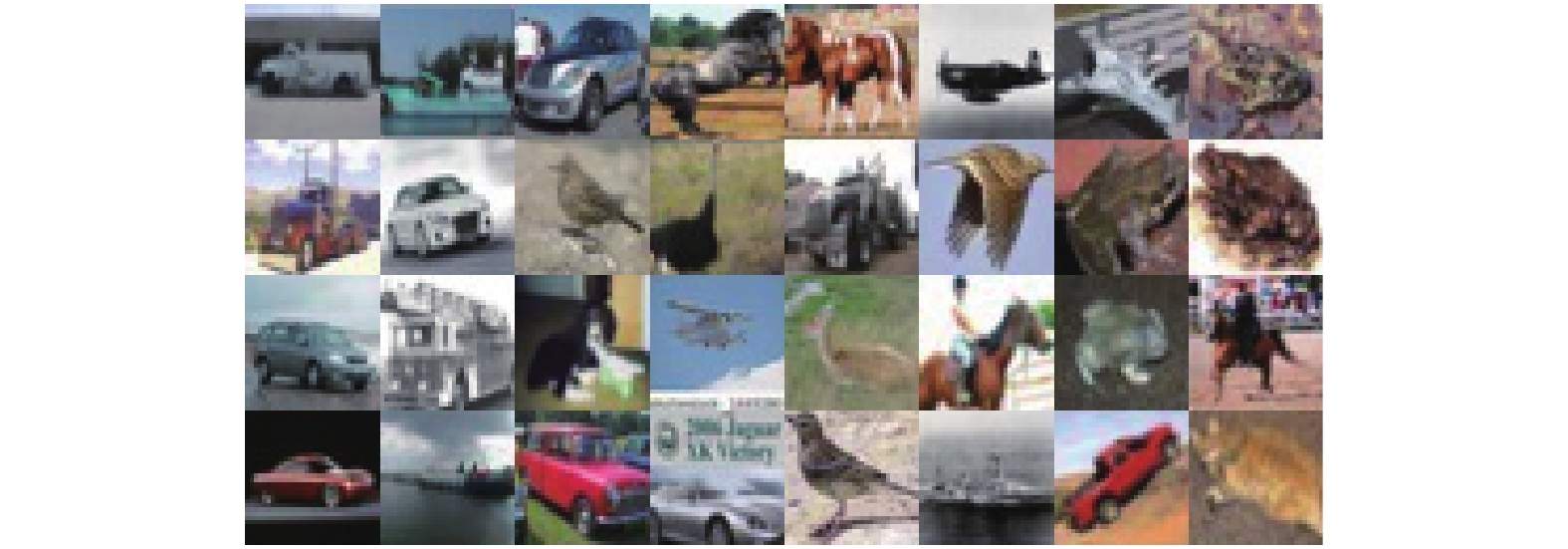
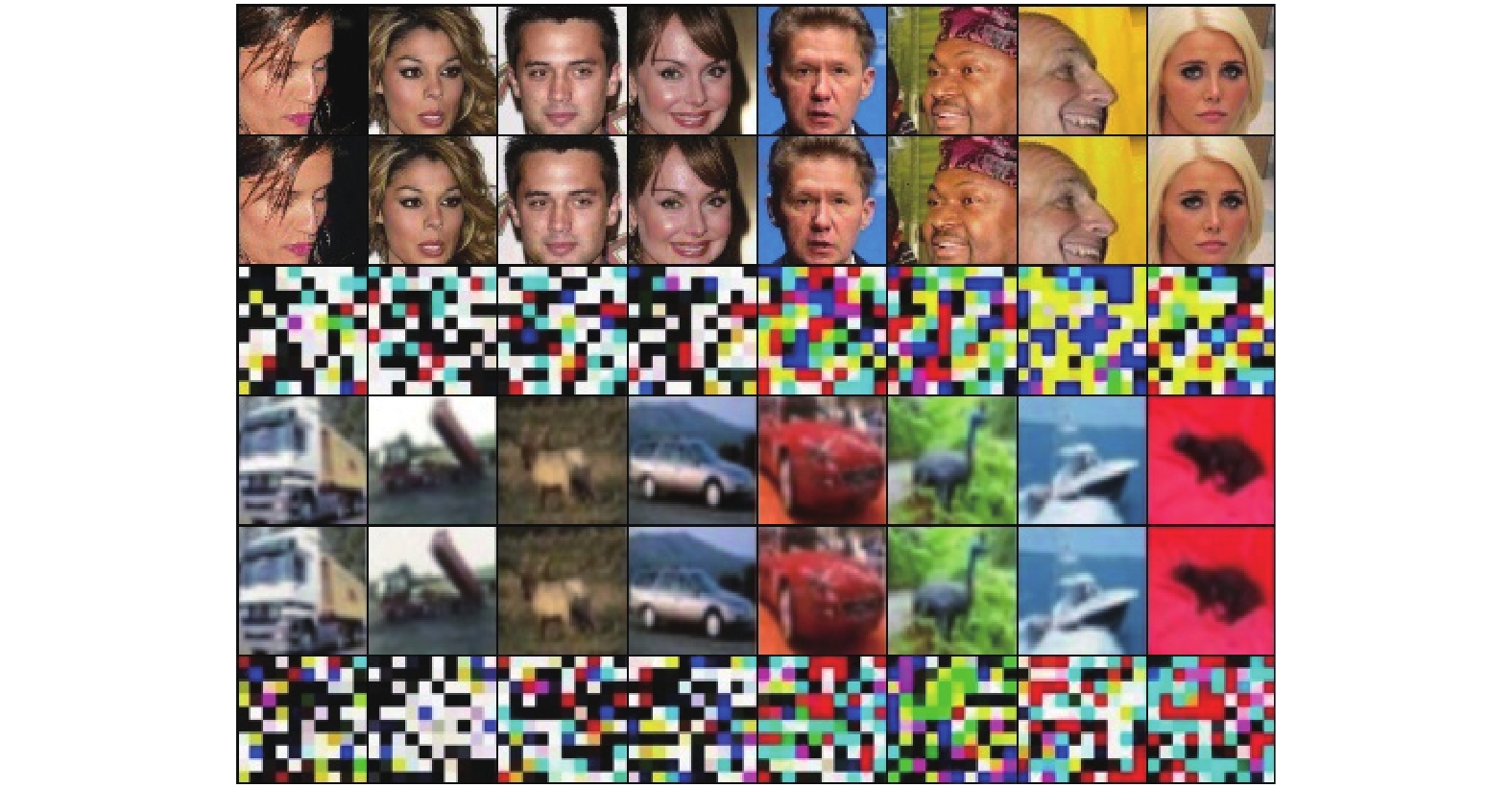
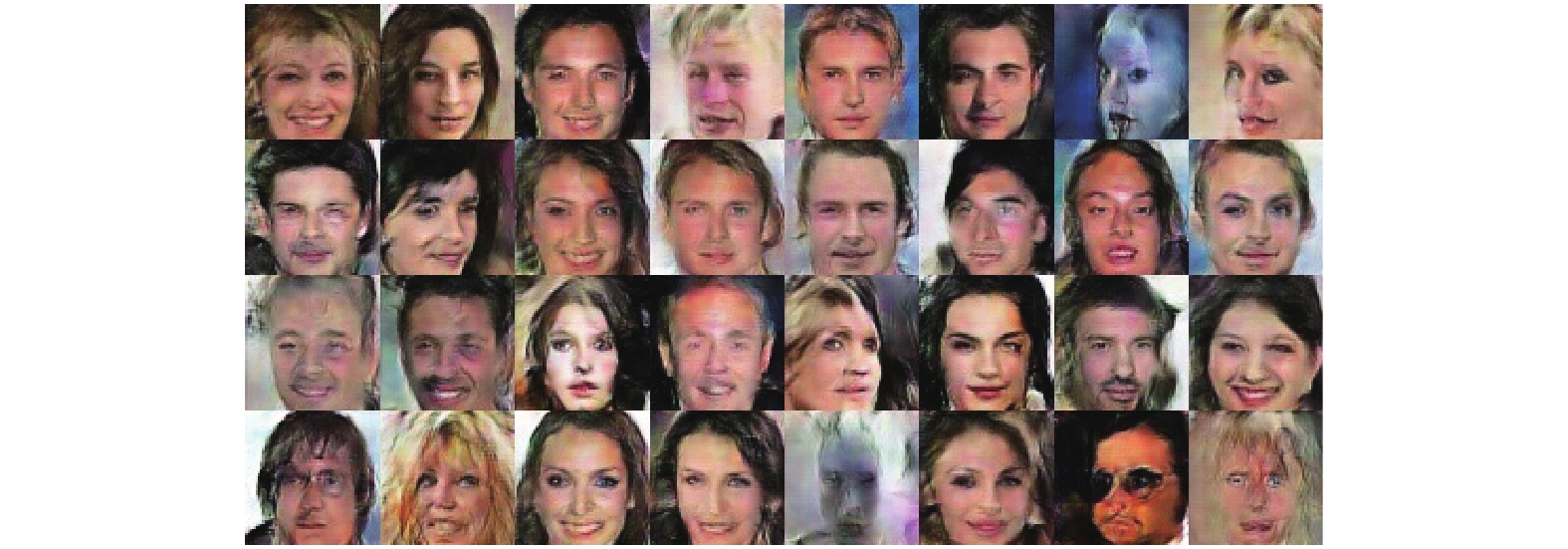
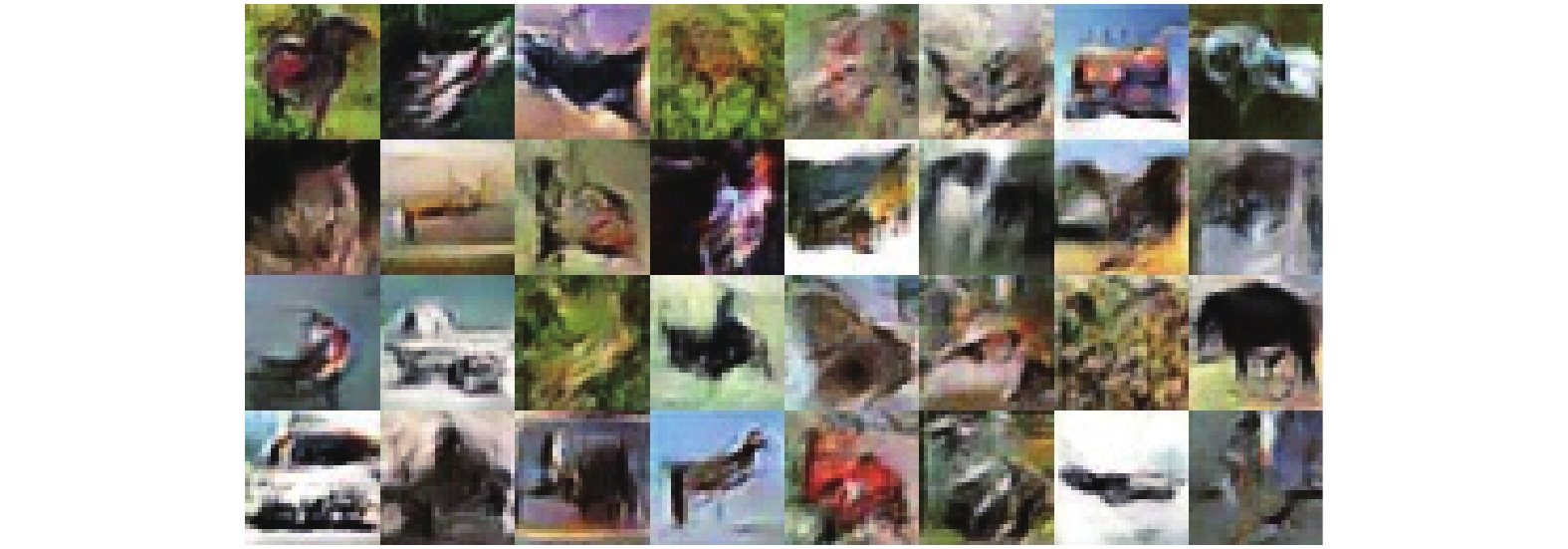
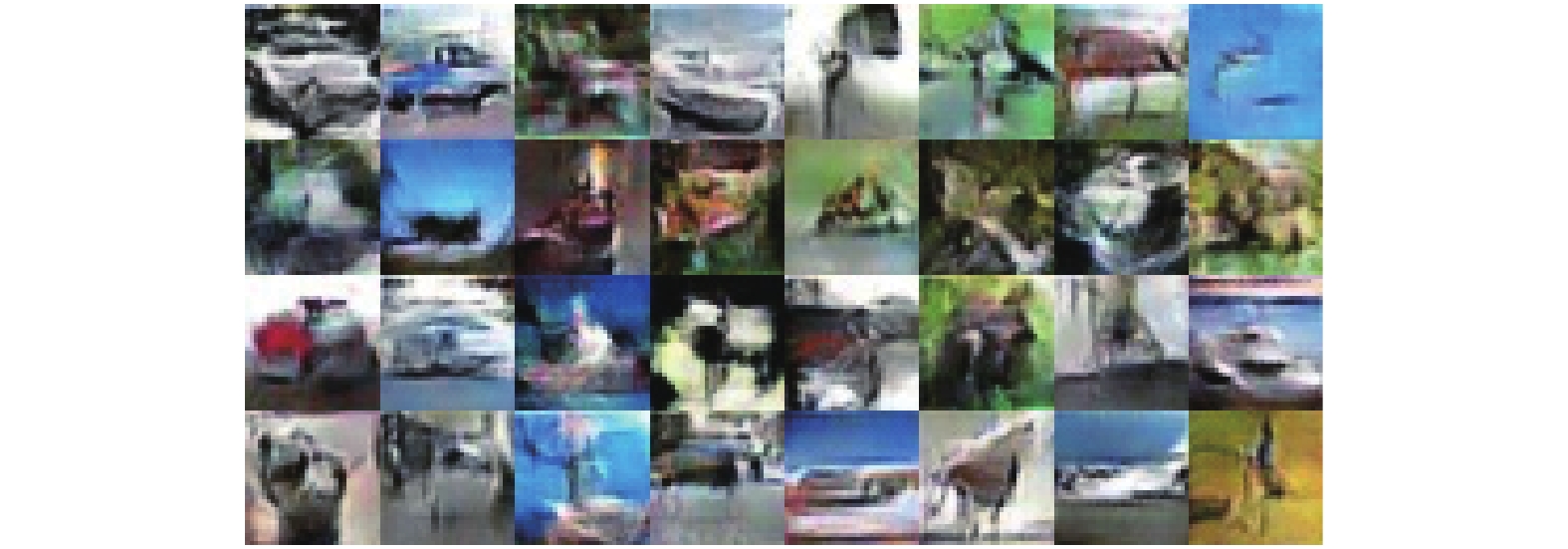
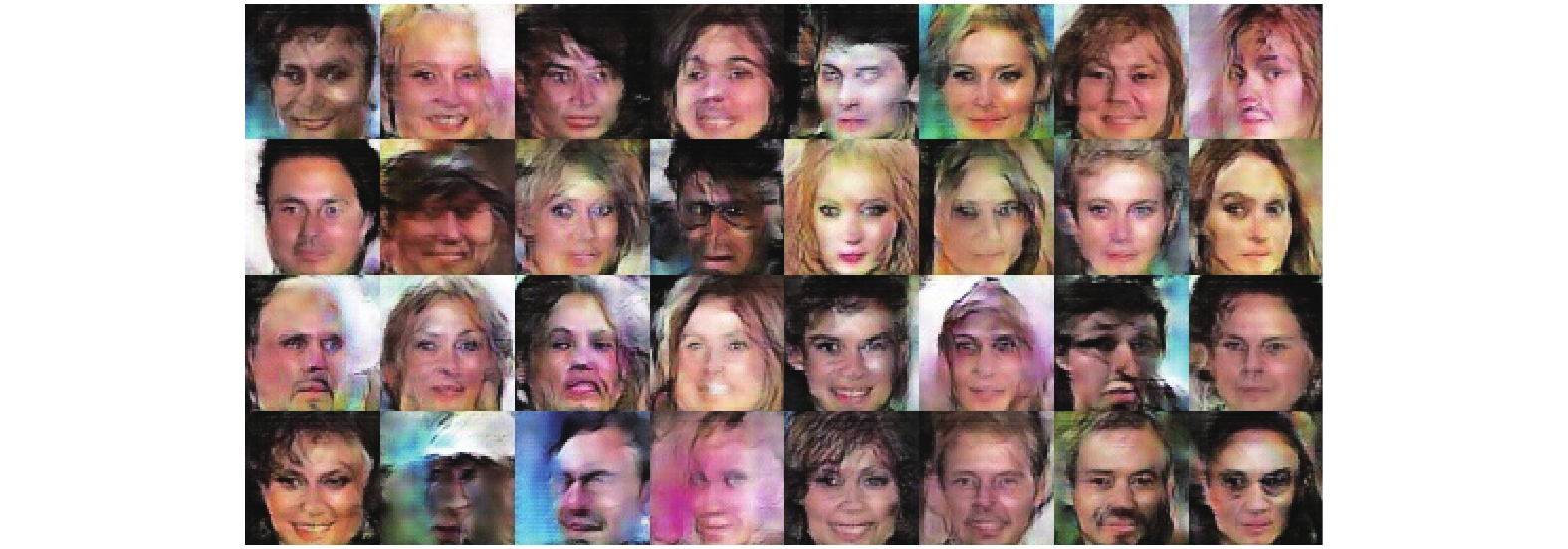
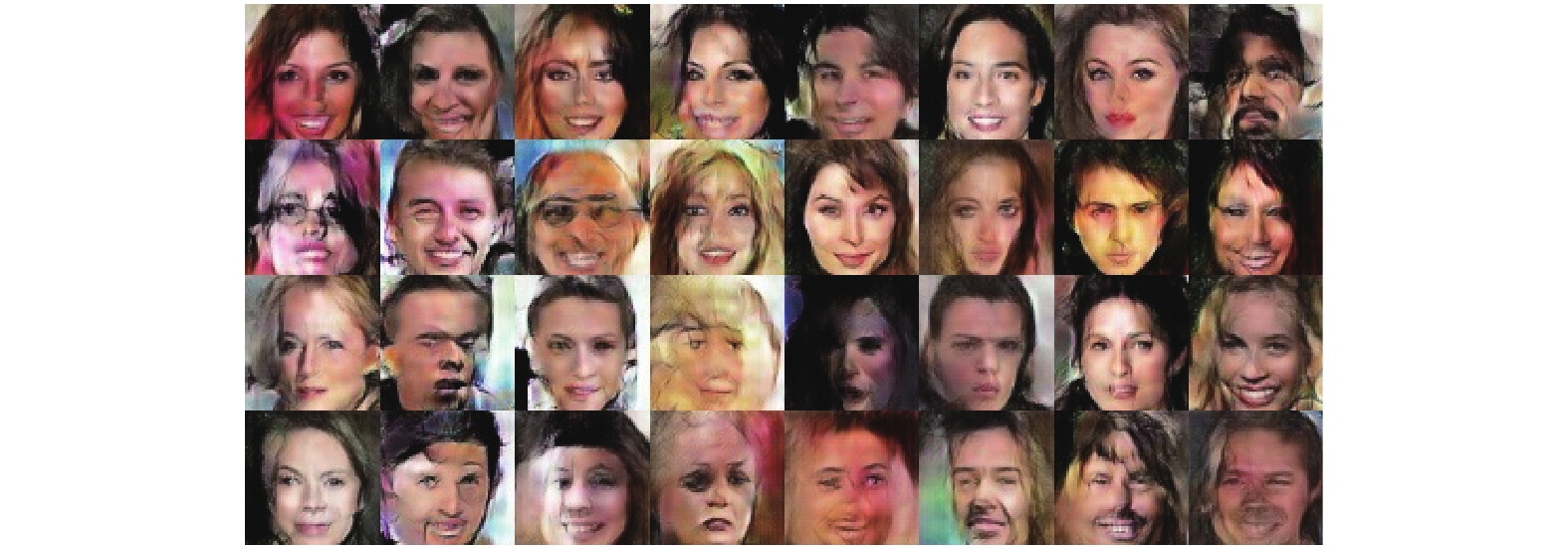
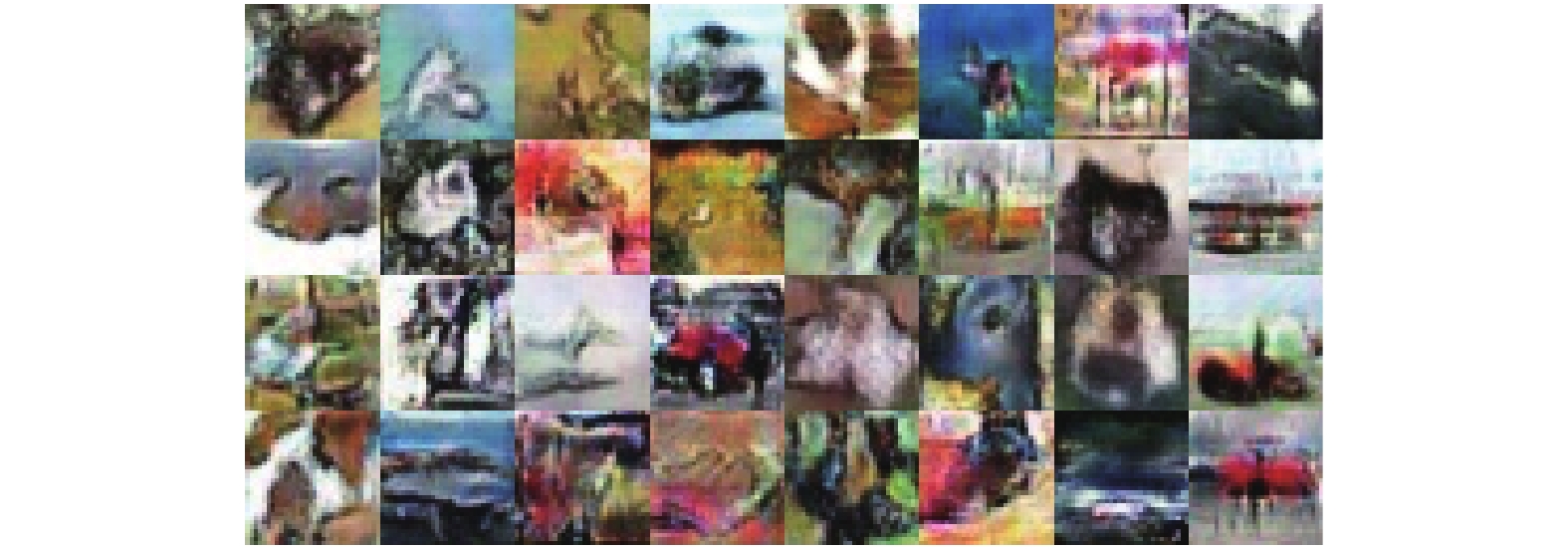
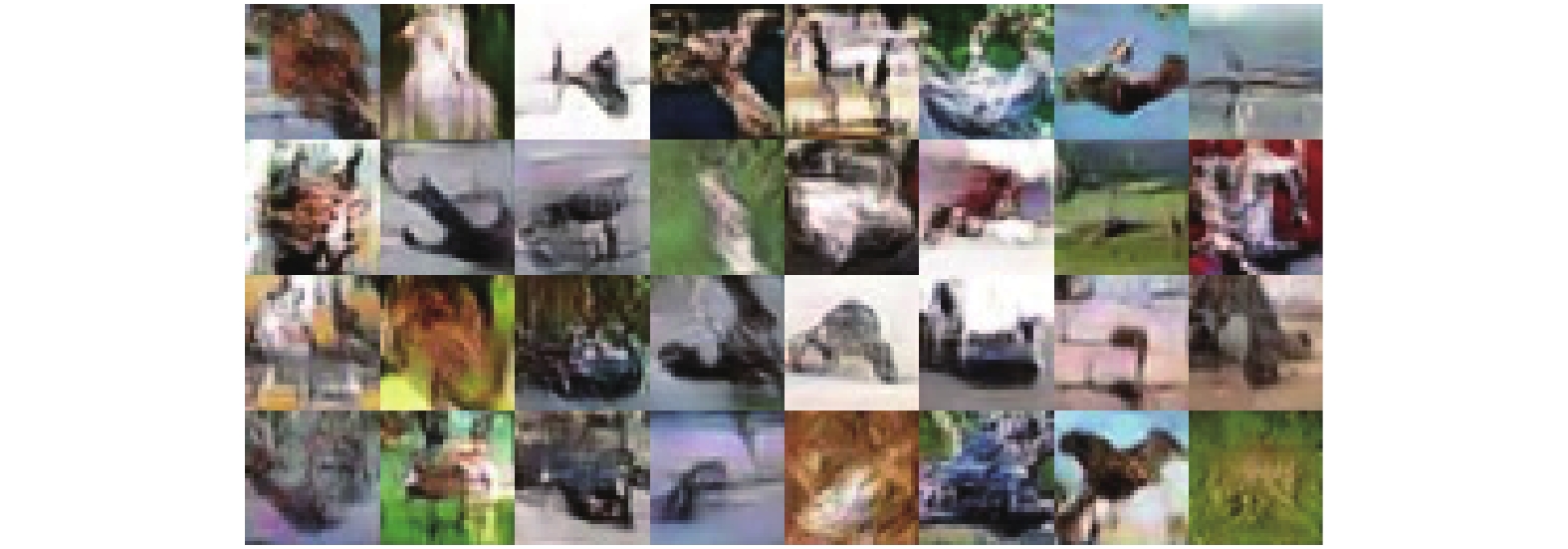
生成式对抗网络(Generative adversarial networks, GANs)是一种有效模拟训练数据分布的生成方法, 其训练的常见问题之一是优化Jensen-Shannon (JS)散度时可能产生梯度消失问题. 针对该问题, 提出了一种解码约束条件下的GANs, 以尽量避免JS散度近似为常数而引发梯度消失现象, 从而提高生成图像的质量. 首先利用U-Net结构的自动编码机(Auto-encoder, AE)学习出与用于激发生成器的随机噪声同维度的训练样本网络中间层特征. 然后在每次对抗训练前使用设计的解码约束条件训练解码器. 其中, 解码器与生成器结构相同, 权重共享. 为证明模型的可行性, 推导给出了引入解码约束条件有利于JS散度不为常数的结论以及解码损失函数的类型选择依据. 为验证模型的性能, 利用Celeba和Cifar10数据集, 对比分析了其他6种模型的生成效果. 通过实验对比Inception score (IS)、弗雷歇距离和清晰度等指标发现, 基于样本特征解码约束的GANs能有效提高图像生成质量, 综合性能接近自注意力生成式对抗网络.
生成式对抗网络(Generative adversarial networks, GANs)是一种有效模拟训练数据分布的生成方法, 其训练的常见问题之一是优化Jensen-Shannon (JS)散度时可能产生梯度消失问题. 针对该问题, 提出了一种解码约束条件下的GANs, 以尽量避免JS散度近似为常数而引发梯度消失现象, 从而提高生成图像的质量. 首先利用U-Net结构的自动编码机(Auto-encoder, AE)学习出与用于激发生成器的随机噪声同维度的训练样本网络中间层特征. 然后在每次对抗训练前使用设计的解码约束条件训练解码器. 其中, 解码器与生成器结构相同, 权重共享. 为证明模型的可行性, 推导给出了引入解码约束条件有利于JS散度不为常数的结论以及解码损失函数的类型选择依据. 为验证模型的性能, 利用Celeba和Cifar10数据集, 对比分析了其他6种模型的生成效果. 通过实验对比Inception score (IS)、弗雷歇距离和清晰度等指标发现, 基于样本特征解码约束的GANs能有效提高图像生成质量, 综合性能接近自注意力生成式对抗网络.








2022, 48(9): 2301-2315.
doi: 10.16383/j.aas.c190330
摘要:
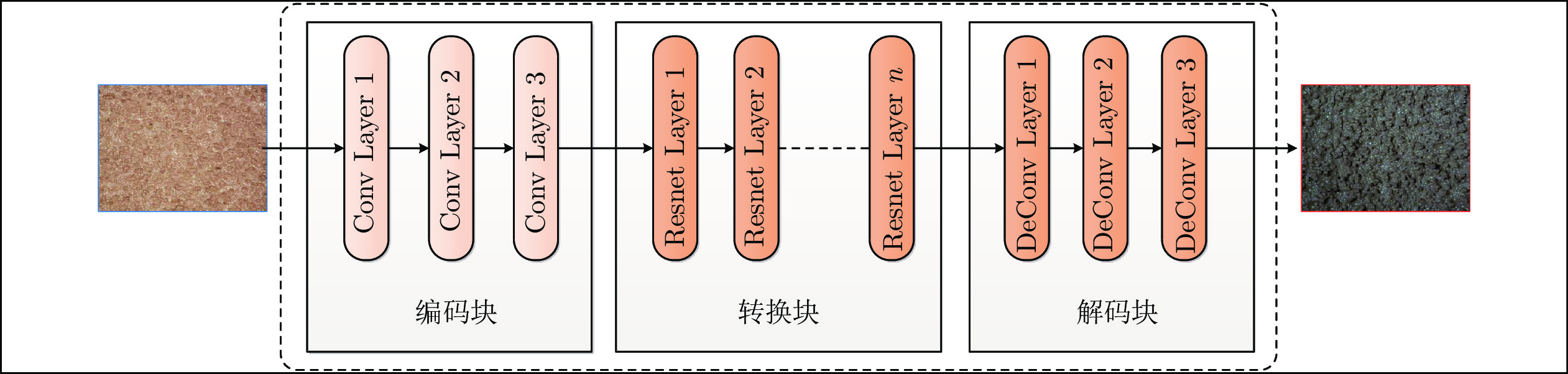
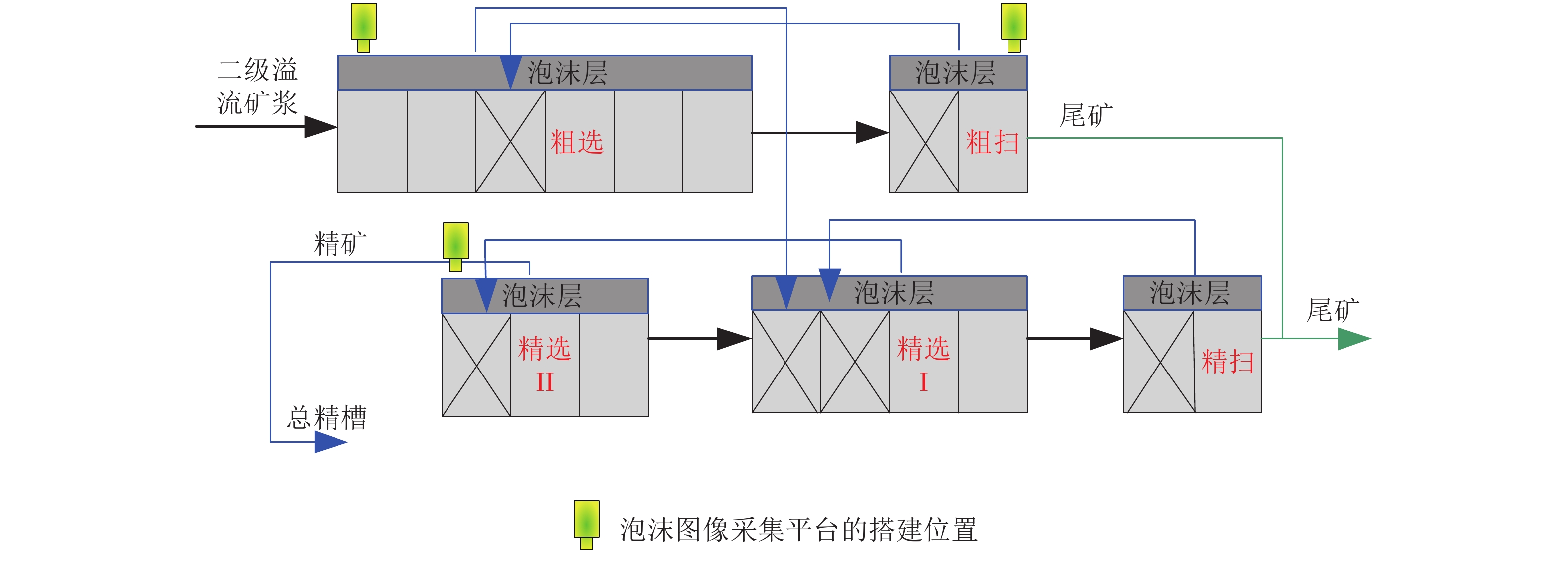
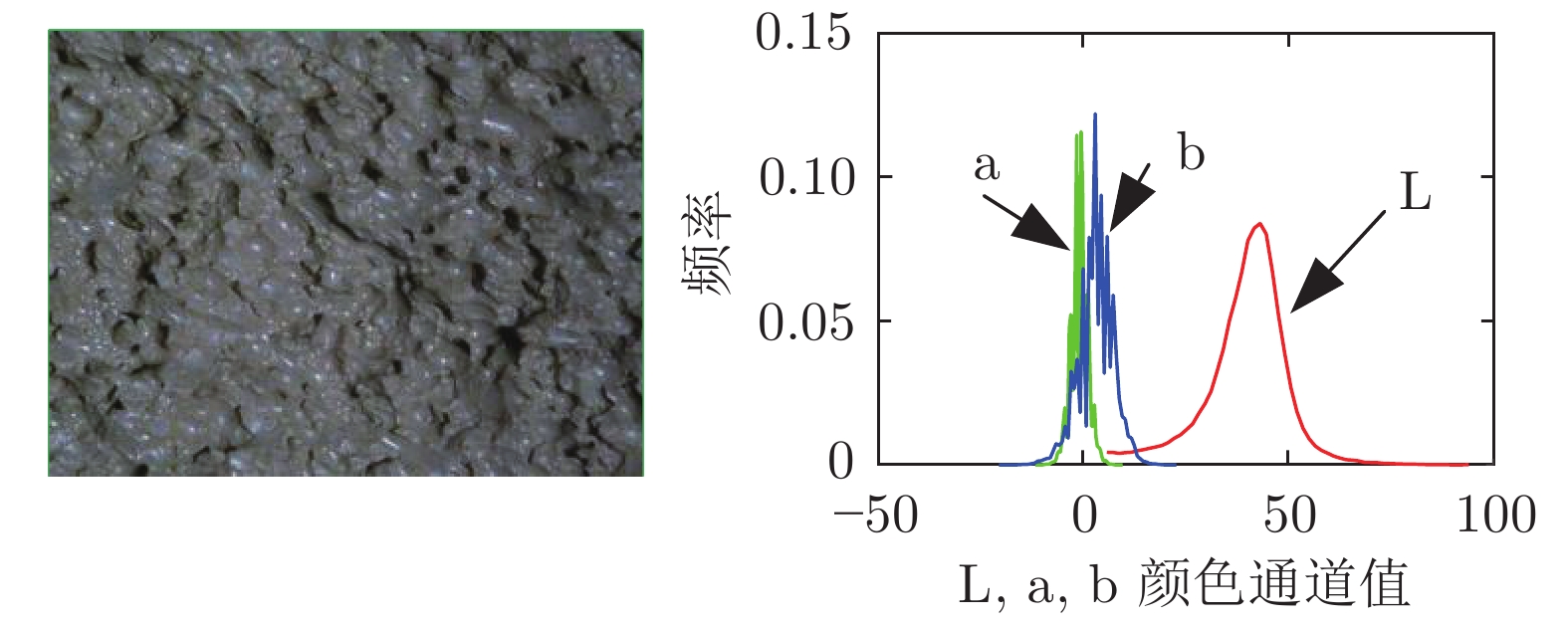
浮选泡沫表面颜色是选矿生产指标(精矿品位)最为快速便捷的直接指示器. 然而, 泡沫图像信号因受多种可变光照的交叉干扰而不可避免存在严重色偏, 导致浮选指标难以准确评估. 本文将传统的基于光照估计的图像颜色恒常问题转换为一种结构保持的图到图颜色(风格)转移问题, 提出一种基于Wasserstein距离的循环生成对抗网络(Wasserstein distance-based cycle generative adversarial network, WCGAN)用于泡沫图像光照不变颜色特征在线监测. 在标准颜色恒常数据集和实际的工业铝土矿浮选过程进行实验验证, 结果表明, WCGAN能有效实现各种未知光照条件下(色偏)图像到基准光照条件下的颜色转换, 转换速度快且具有模型在线更新功能. 与传统的基于生成对抗学习的颜色转换模型相比, WCGAN能更好地保持泡沫图像的轮廓和表面纹理等结构信息, 为基于机器视觉的矿物浮选过程生产指标的在线监测提供了有效的客观评价信息.
浮选泡沫表面颜色是选矿生产指标(精矿品位)最为快速便捷的直接指示器. 然而, 泡沫图像信号因受多种可变光照的交叉干扰而不可避免存在严重色偏, 导致浮选指标难以准确评估. 本文将传统的基于光照估计的图像颜色恒常问题转换为一种结构保持的图到图颜色(风格)转移问题, 提出一种基于Wasserstein距离的循环生成对抗网络(Wasserstein distance-based cycle generative adversarial network, WCGAN)用于泡沫图像光照不变颜色特征在线监测. 在标准颜色恒常数据集和实际的工业铝土矿浮选过程进行实验验证, 结果表明, WCGAN能有效实现各种未知光照条件下(色偏)图像到基准光照条件下的颜色转换, 转换速度快且具有模型在线更新功能. 与传统的基于生成对抗学习的颜色转换模型相比, WCGAN能更好地保持泡沫图像的轮廓和表面纹理等结构信息, 为基于机器视觉的矿物浮选过程生产指标的在线监测提供了有效的客观评价信息.





2022, 48(9): 2316-2326.
doi: 10.16383/j.aas.c190716
摘要:
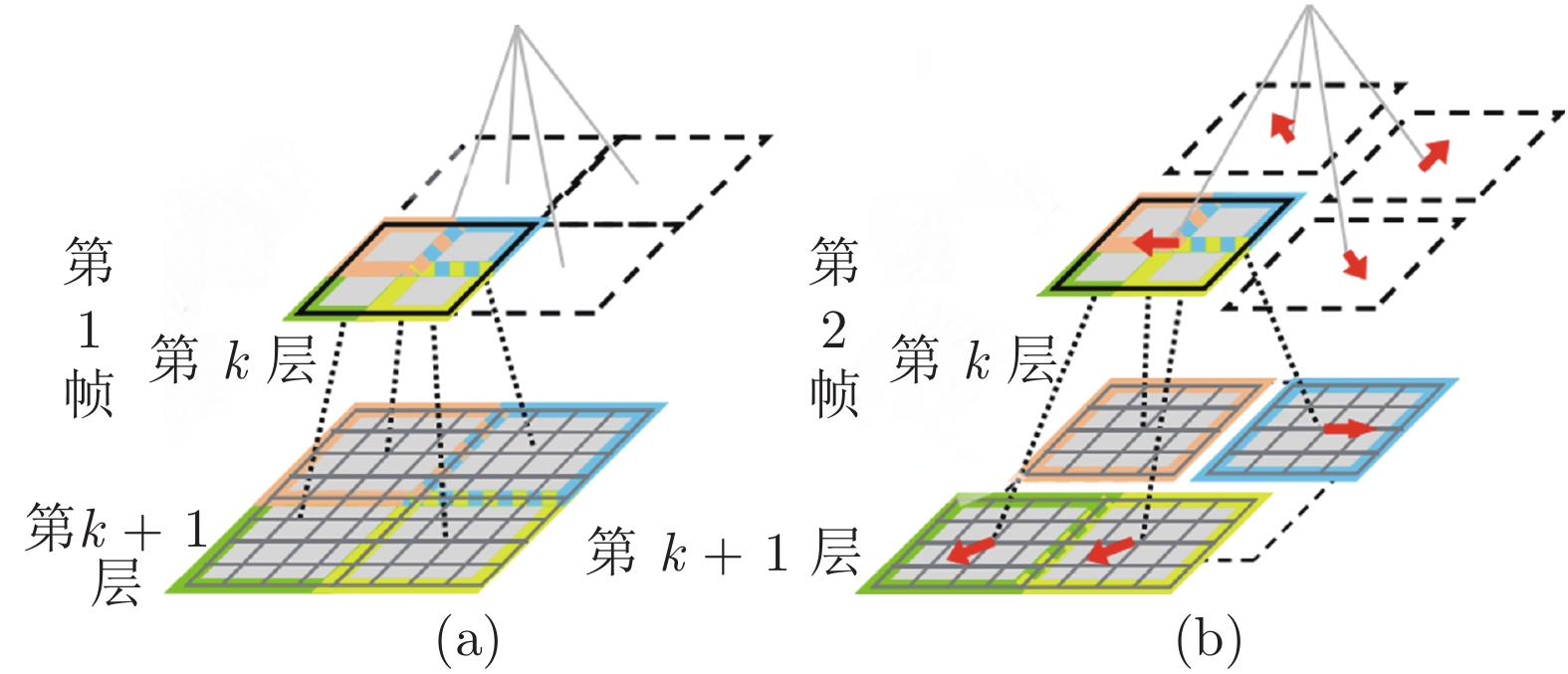
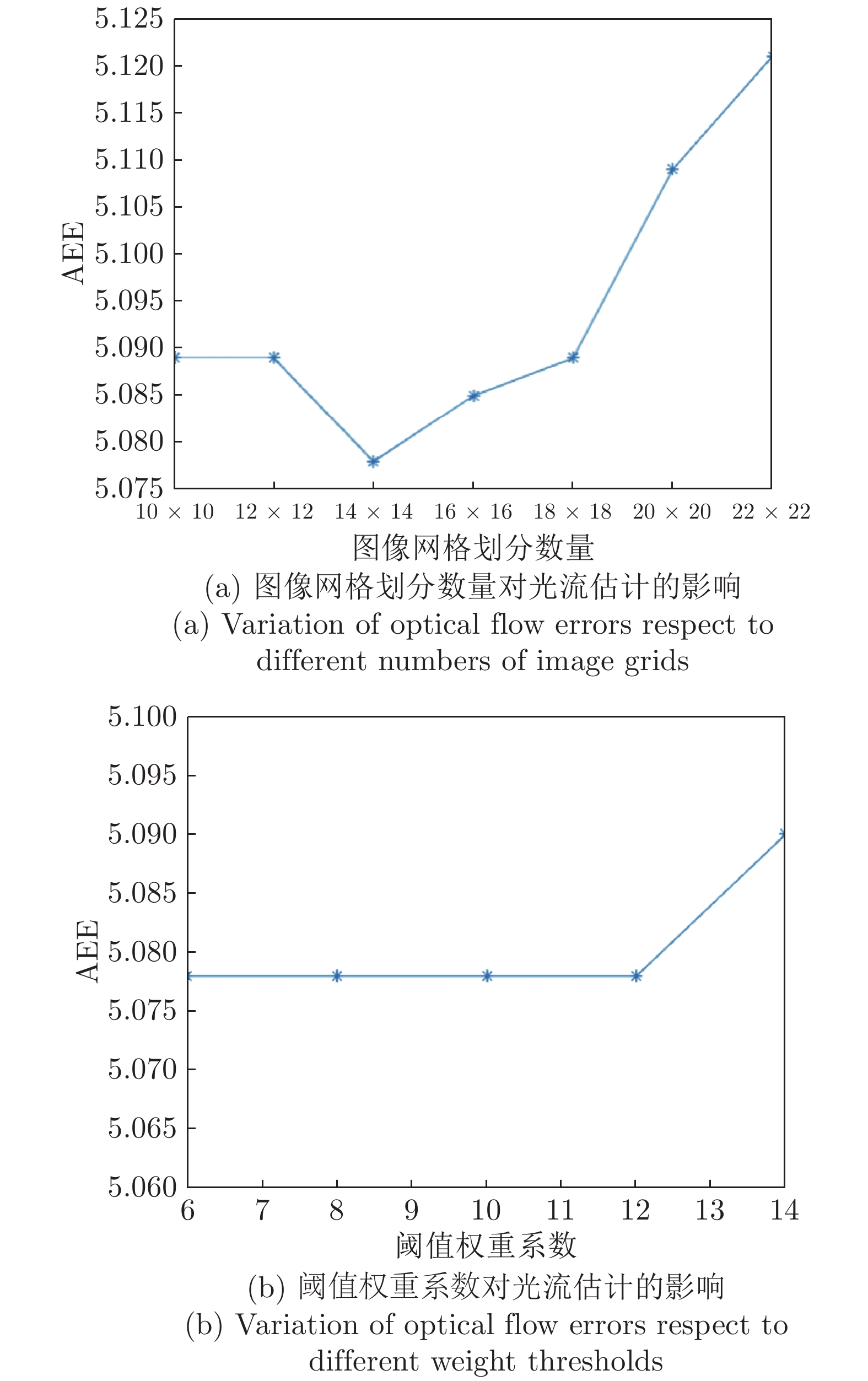
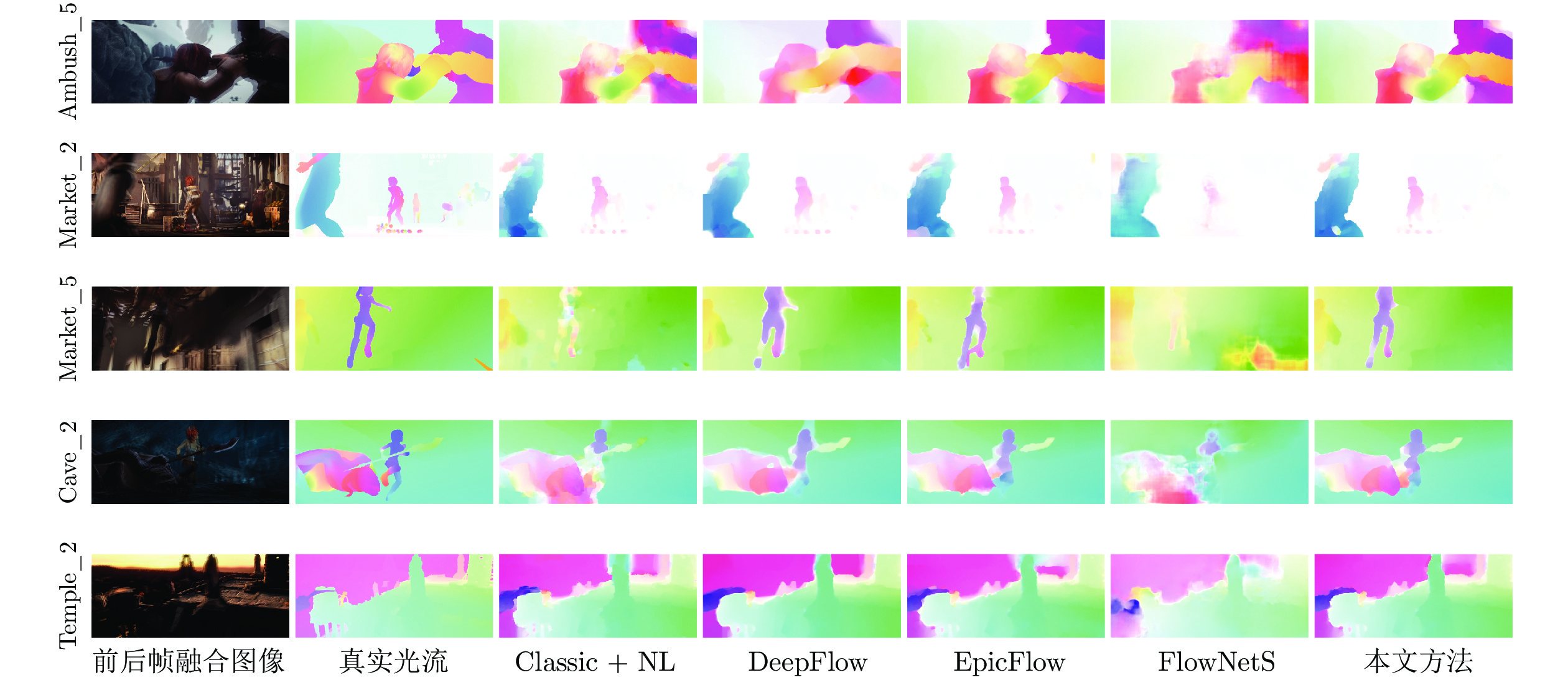
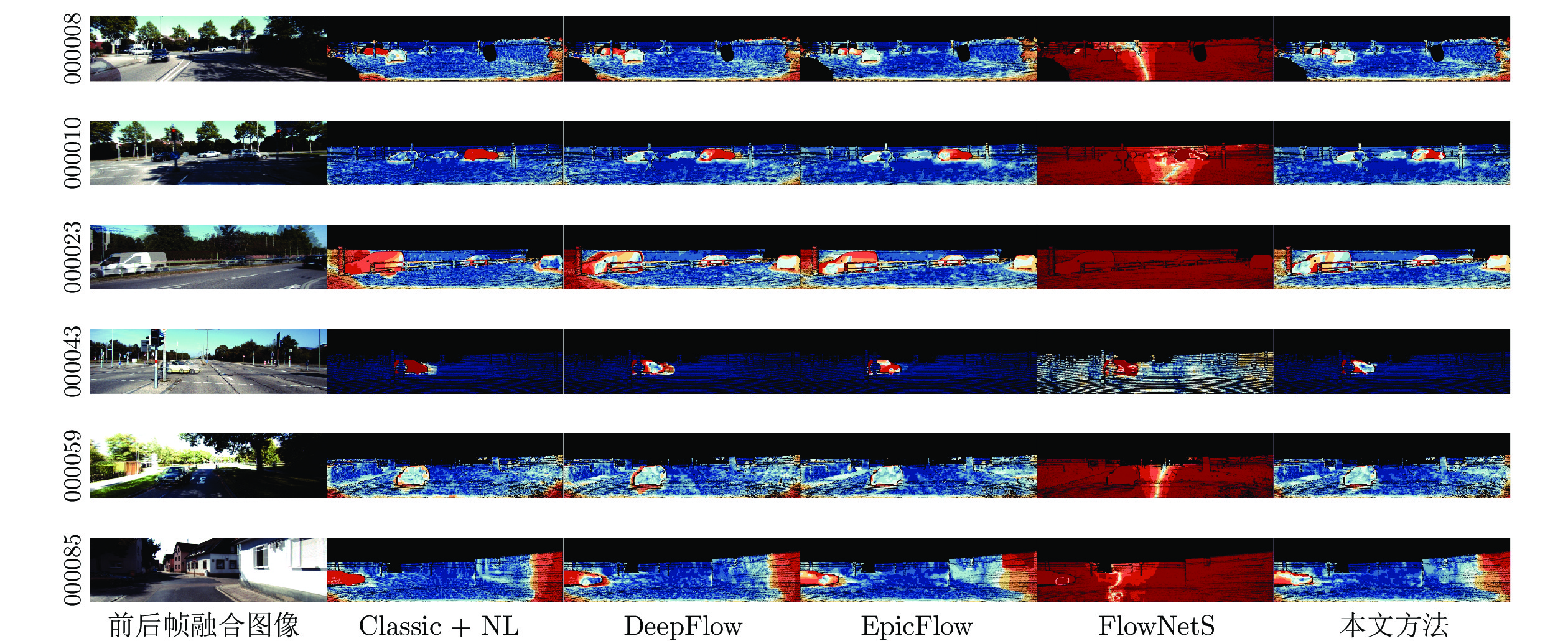
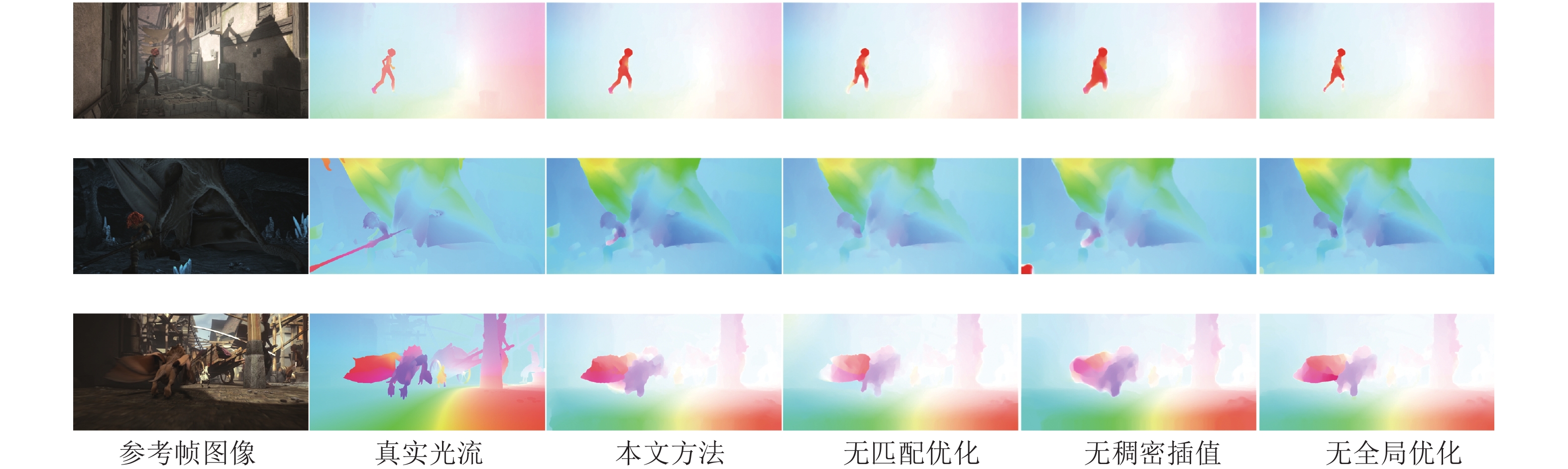
针对非刚性大位移运动场景的光流计算准确性与鲁棒性问题, 提出一种基于深度匹配的由稀疏到稠密大位移运动光流估计方法. 首先利用深度匹配模型计算图像序列相邻帧的初始稀疏运动场; 其次采用网格化邻域支持优化模型筛选具有较高置信度的图像网格和匹配像素点, 获得鲁棒的稀疏运动场; 然后对稀疏运动场进行边缘保护稠密插值, 并设计全局能量泛函优化求解稠密光流场. 最后分别利用MPI-Sintel和KITTI数据库提供的测试图像集对本文方法和Classic + NL, DeepFlow, EpicFlow以及FlowNetS等变分模型、匹配策略和深度学习光流计算方法进行综合对比与分析, 实验结果表明本文方法相对于其他方法具有更高的光流计算精度, 尤其在非刚性大位移和运动遮挡区域具有更好的鲁棒性与可靠性.
针对非刚性大位移运动场景的光流计算准确性与鲁棒性问题, 提出一种基于深度匹配的由稀疏到稠密大位移运动光流估计方法. 首先利用深度匹配模型计算图像序列相邻帧的初始稀疏运动场; 其次采用网格化邻域支持优化模型筛选具有较高置信度的图像网格和匹配像素点, 获得鲁棒的稀疏运动场; 然后对稀疏运动场进行边缘保护稠密插值, 并设计全局能量泛函优化求解稠密光流场. 最后分别利用MPI-Sintel和KITTI数据库提供的测试图像集对本文方法和Classic + NL, DeepFlow, EpicFlow以及FlowNetS等变分模型、匹配策略和深度学习光流计算方法进行综合对比与分析, 实验结果表明本文方法相对于其他方法具有更高的光流计算精度, 尤其在非刚性大位移和运动遮挡区域具有更好的鲁棒性与可靠性.

2022, 48(9): 2327-2336.
doi: 10.16383/j.aas.c190796
摘要:
针对稀疏自动编码器(Sparse auto encoder, SAE)采用sigmoid激活函数容易造成梯度消失的问题, 用一种新的Tan函数替代原有的sigmoid函数; 针对SAE采用Kullback-Leibler (KL) 散度进行稀疏性约束在回归预测方面的局限性, 以dropout机制替代KL散度实现网络的稀疏性. 利用改进SAE对滚动轴承振动信号进行无监督深层特征自适应提取, 无需人工设计标签进行有监督微调. 同时, 考虑到滚动轴承剩余使用寿命(Remaining useful life, RUL)预测方法一般仅考虑过去信息而忽略未来信息, 引入双向长短时记忆网络(Bi-directional long short-term memory, Bi-LSTM)构建滚动轴承RUL的预测模型. 在2个轴承数据集上的实验结果均表明, 所提基于改进SAE和Bi-LSTM的滚动轴承RUL预测方法不仅可以提高模型的收敛速度而且具有较低的预测误差.
针对稀疏自动编码器(Sparse auto encoder, SAE)采用sigmoid激活函数容易造成梯度消失的问题, 用一种新的Tan函数替代原有的sigmoid函数; 针对SAE采用Kullback-Leibler (KL) 散度进行稀疏性约束在回归预测方面的局限性, 以dropout机制替代KL散度实现网络的稀疏性. 利用改进SAE对滚动轴承振动信号进行无监督深层特征自适应提取, 无需人工设计标签进行有监督微调. 同时, 考虑到滚动轴承剩余使用寿命(Remaining useful life, RUL)预测方法一般仅考虑过去信息而忽略未来信息, 引入双向长短时记忆网络(Bi-directional long short-term memory, Bi-LSTM)构建滚动轴承RUL的预测模型. 在2个轴承数据集上的实验结果均表明, 所提基于改进SAE和Bi-LSTM的滚动轴承RUL预测方法不仅可以提高模型的收敛速度而且具有较低的预测误差.













2022, 48(9): 2337-2351.
doi: 10.16383/j.aas.c190532
摘要:
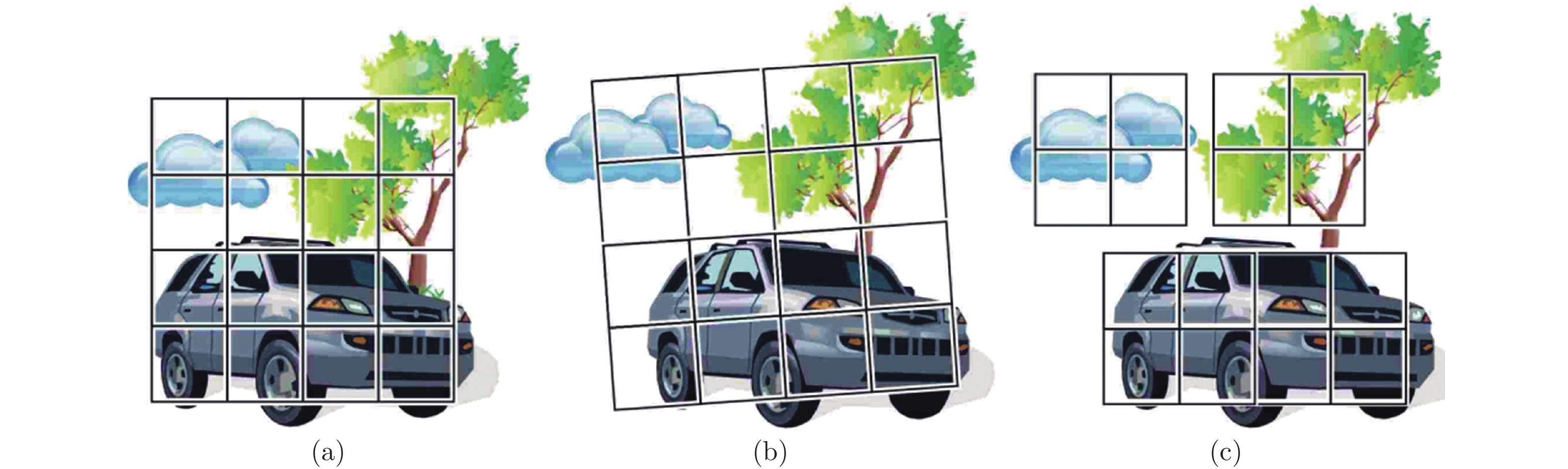
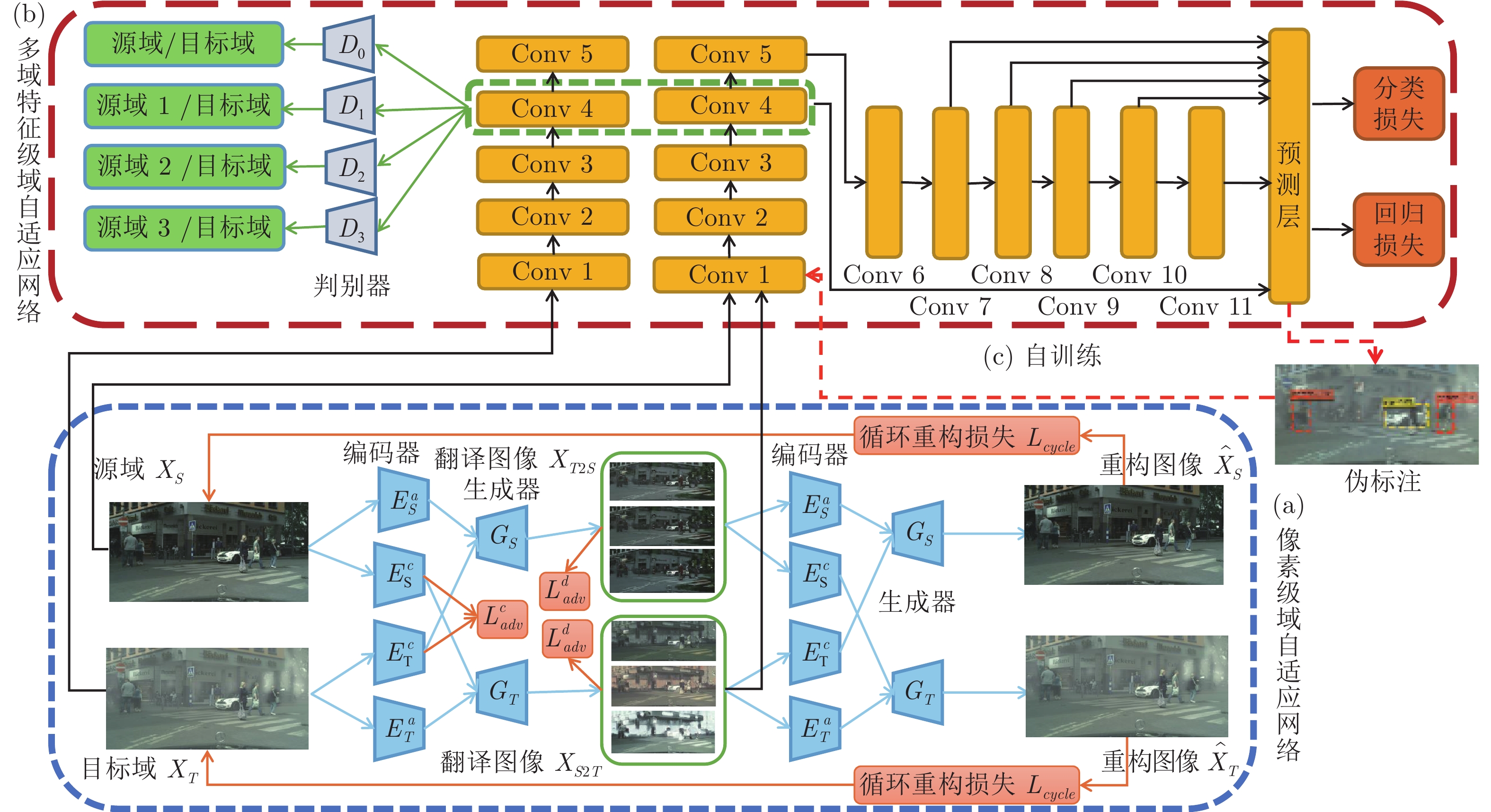
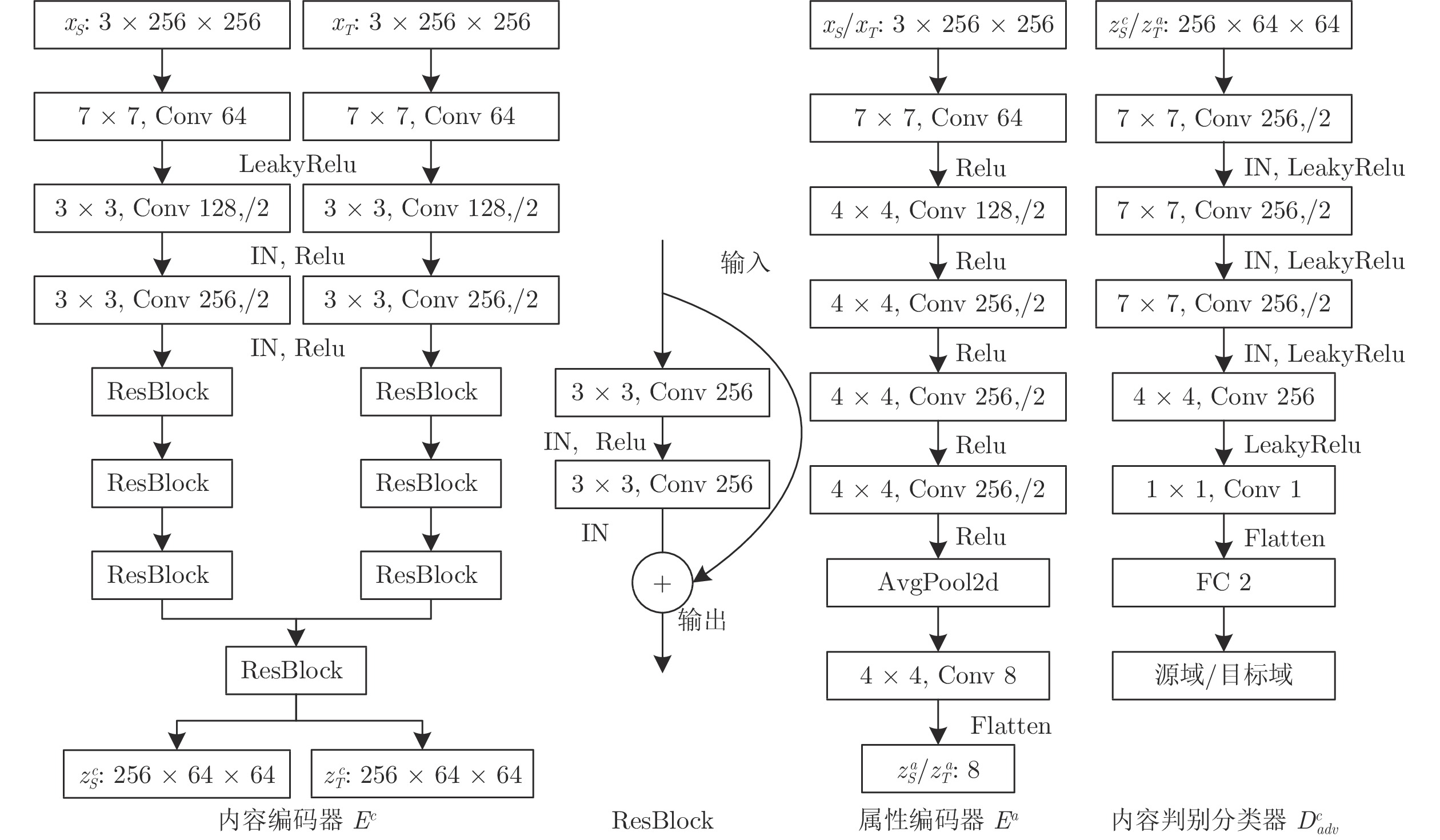
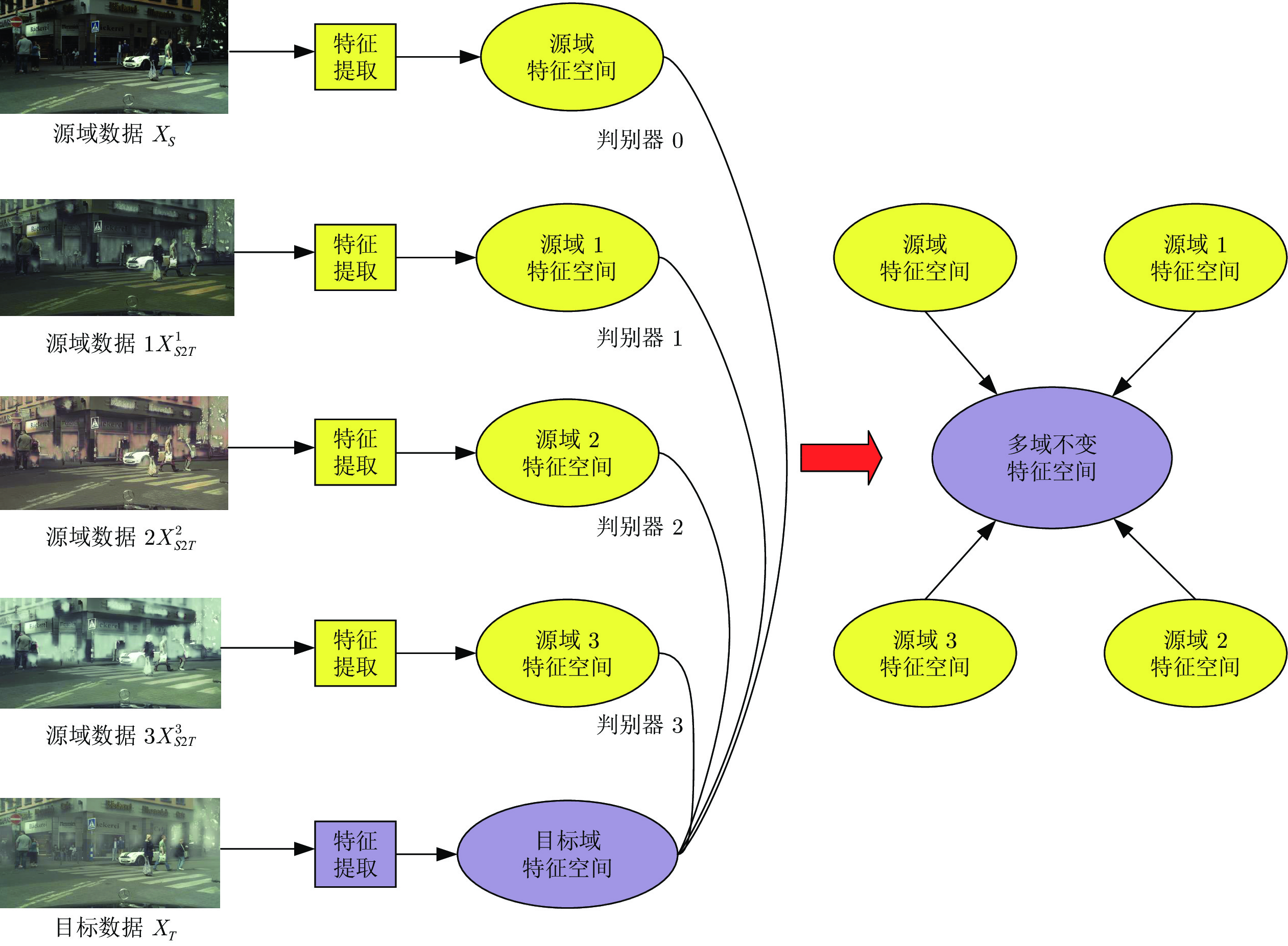
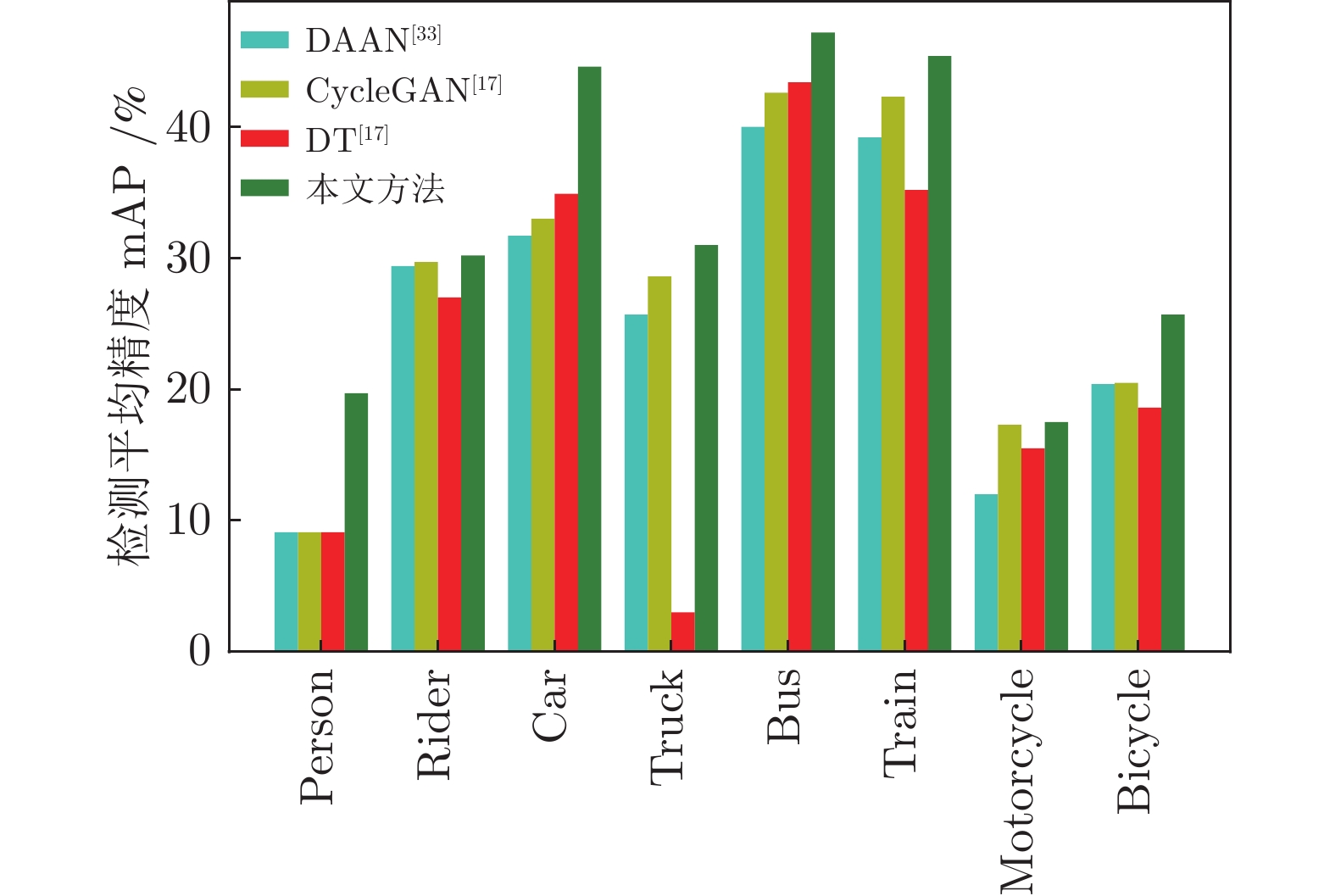
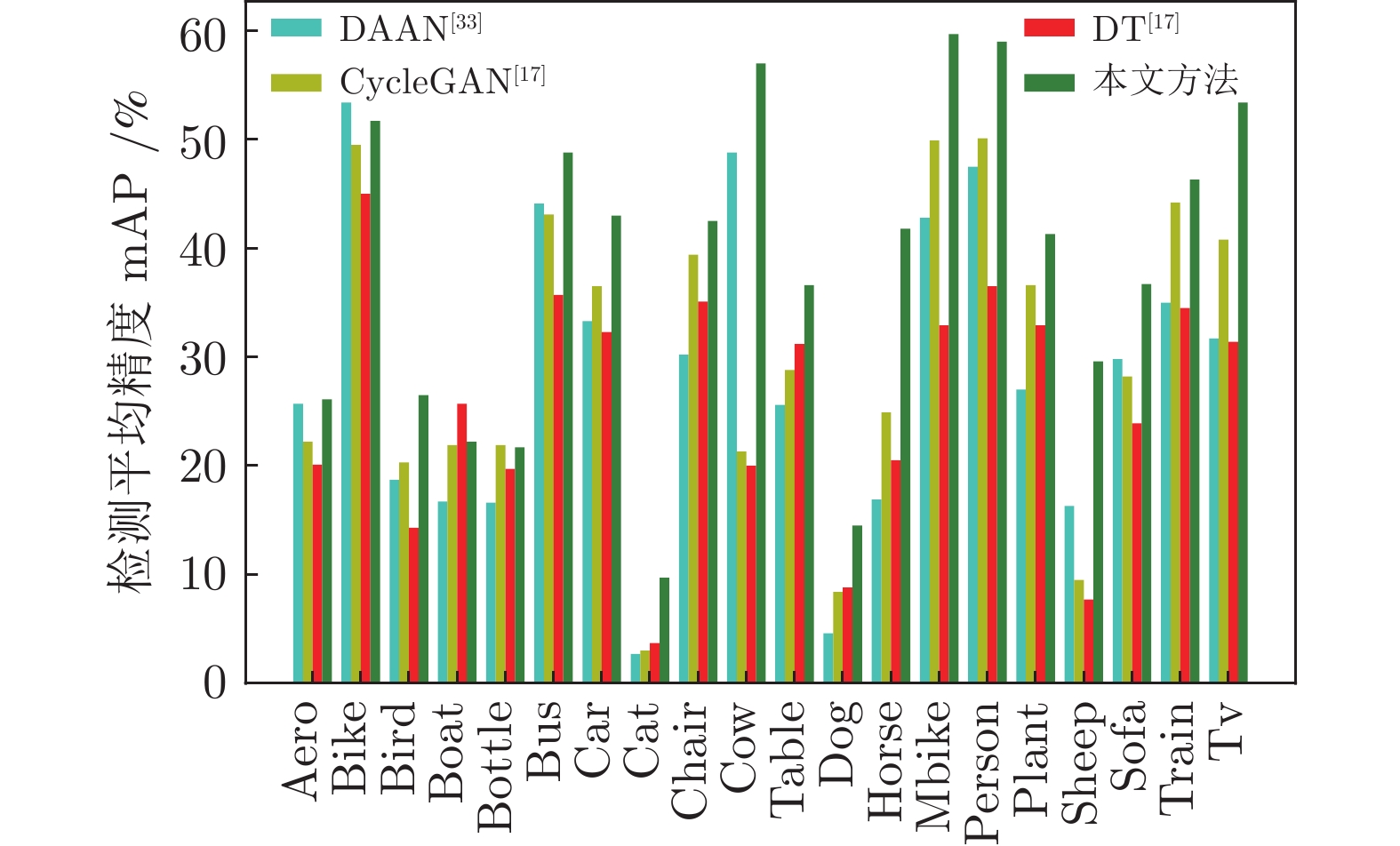
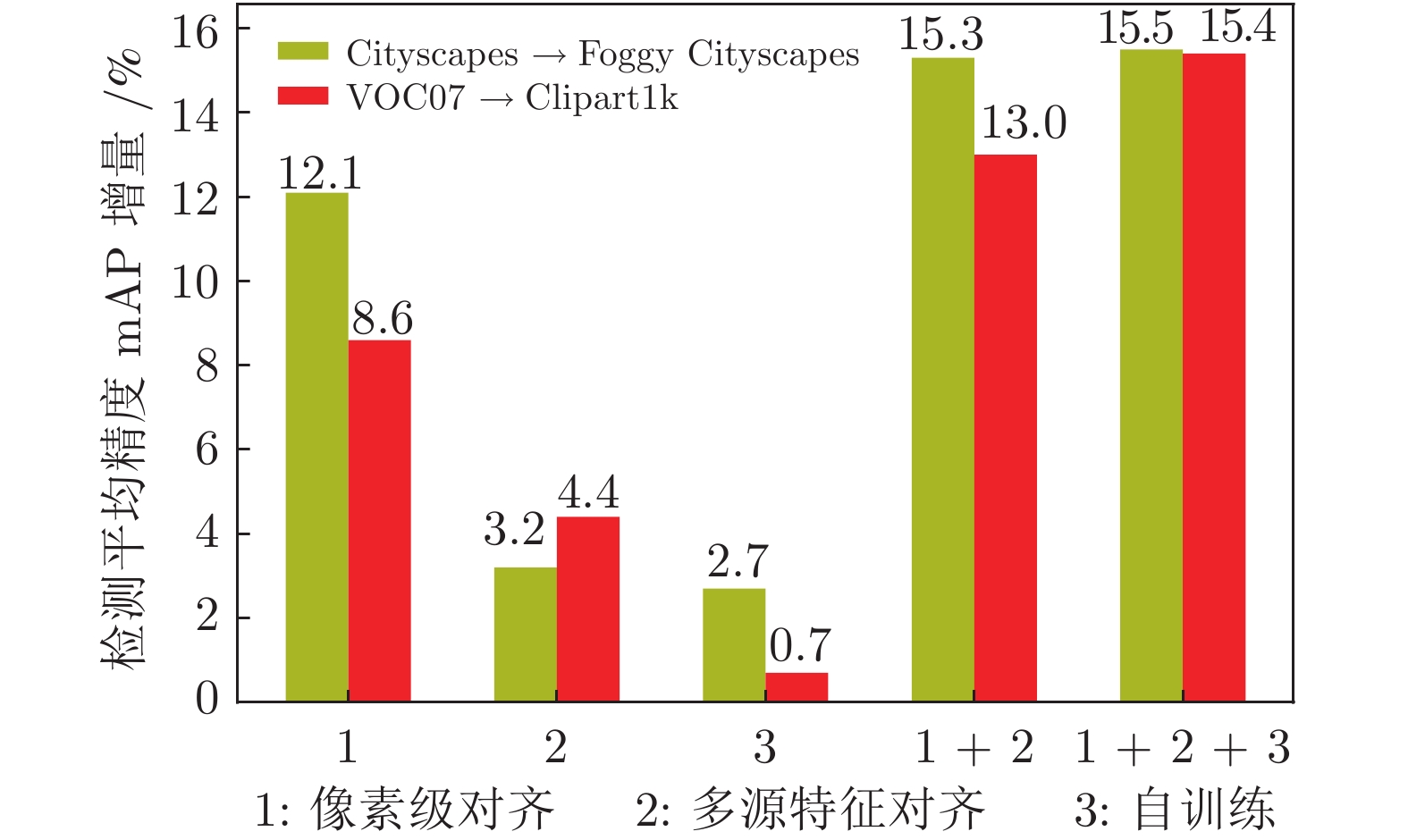
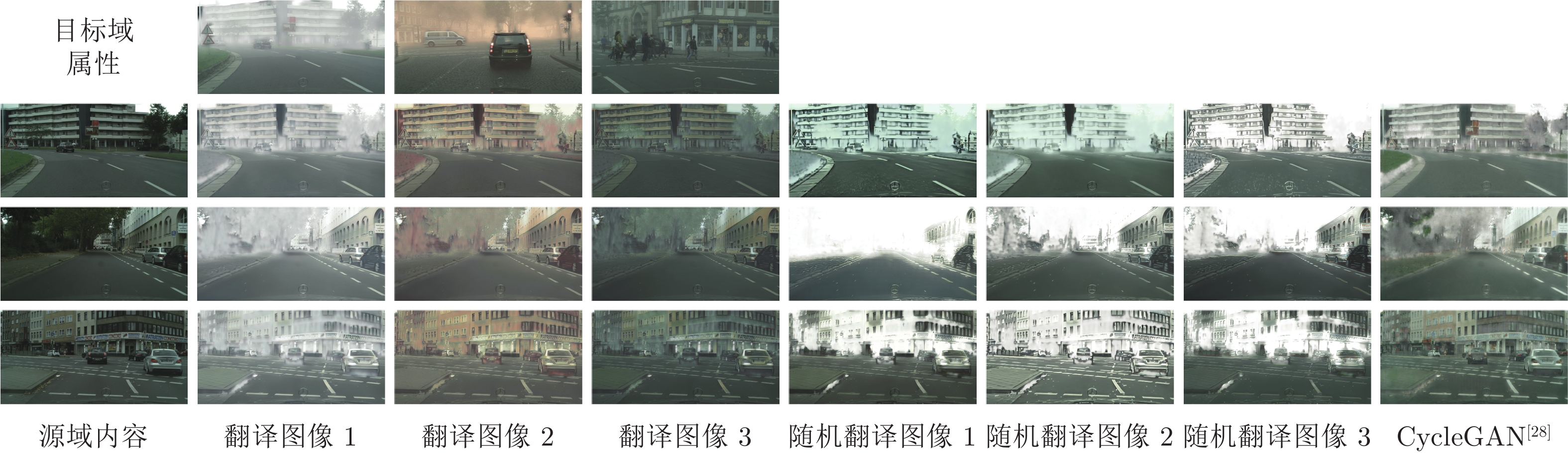
针对目标检测任务中获取人工标注训练样本的困难, 提出一种在像素级与特征级渐进完成域自适应的无监督跨域目标检测方法. 现有的像素级域自适应方法中, 存在翻译图像风格单一、内容结构不一致的问题. 因此, 将输入图像分解为域不变的内容空间及域特有的属性空间, 综合不同空间表示进行多样性的图像翻译, 同时保留图像的空间语义结构以实现标注信息的迁移. 此外, 对特征级域自适应而言, 为缓解单源域引起的源域偏向问题, 将得到的带有标注的多样性翻译图像作为多源域训练集, 设计基于多领域的对抗判别模块, 从而获取多个领域不变的特征表示. 最后, 采用自训练方案迭代生成目标域训练集伪标签, 以进一步提升模型在目标域上的检测效果. 在Cityscapes & Foggy Cityscapes与VOC07 & Clipart1k数据集上的实验结果表明, 相比现有的无监督跨域检测算法, 该检测框架具更优越的迁移检测性能.
针对目标检测任务中获取人工标注训练样本的困难, 提出一种在像素级与特征级渐进完成域自适应的无监督跨域目标检测方法. 现有的像素级域自适应方法中, 存在翻译图像风格单一、内容结构不一致的问题. 因此, 将输入图像分解为域不变的内容空间及域特有的属性空间, 综合不同空间表示进行多样性的图像翻译, 同时保留图像的空间语义结构以实现标注信息的迁移. 此外, 对特征级域自适应而言, 为缓解单源域引起的源域偏向问题, 将得到的带有标注的多样性翻译图像作为多源域训练集, 设计基于多领域的对抗判别模块, 从而获取多个领域不变的特征表示. 最后, 采用自训练方案迭代生成目标域训练集伪标签, 以进一步提升模型在目标域上的检测效果. 在Cityscapes & Foggy Cityscapes与VOC07 & Clipart1k数据集上的实验结果表明, 相比现有的无监督跨域检测算法, 该检测框架具更优越的迁移检测性能.





2022, 48(9): 2352-2360.
doi: 10.16383/j.aas.c190451
摘要:
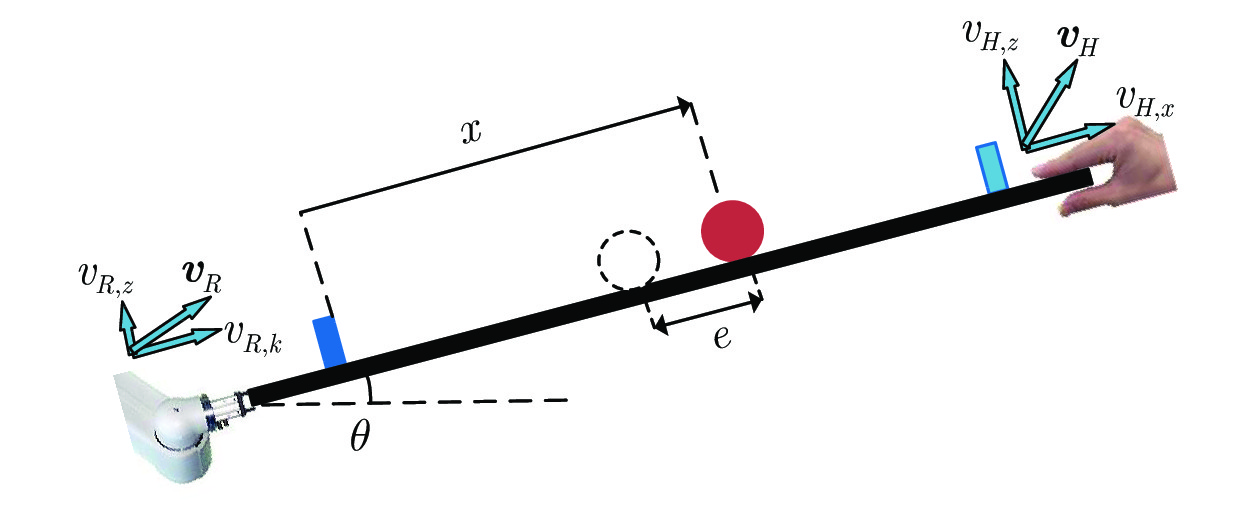
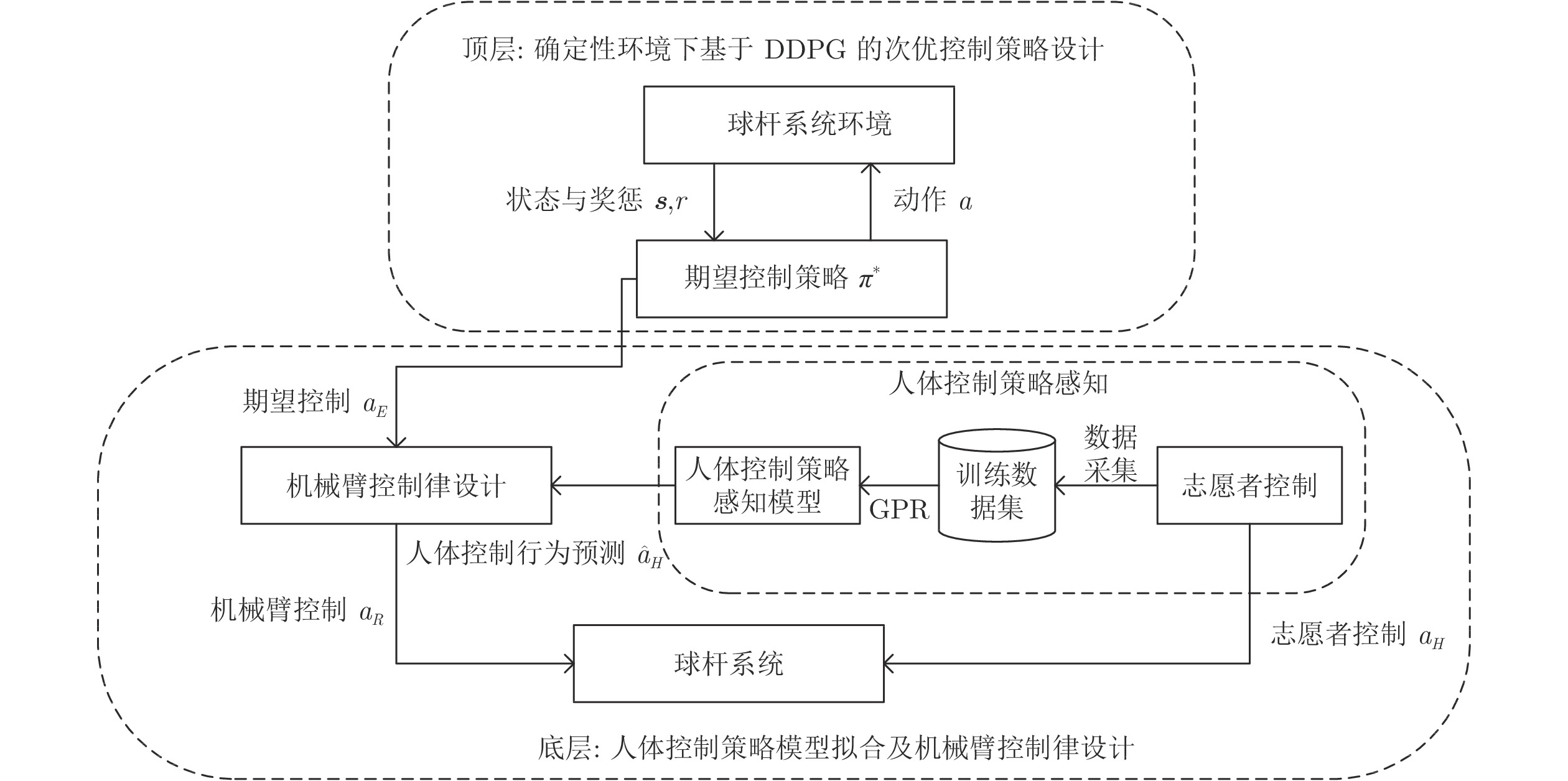
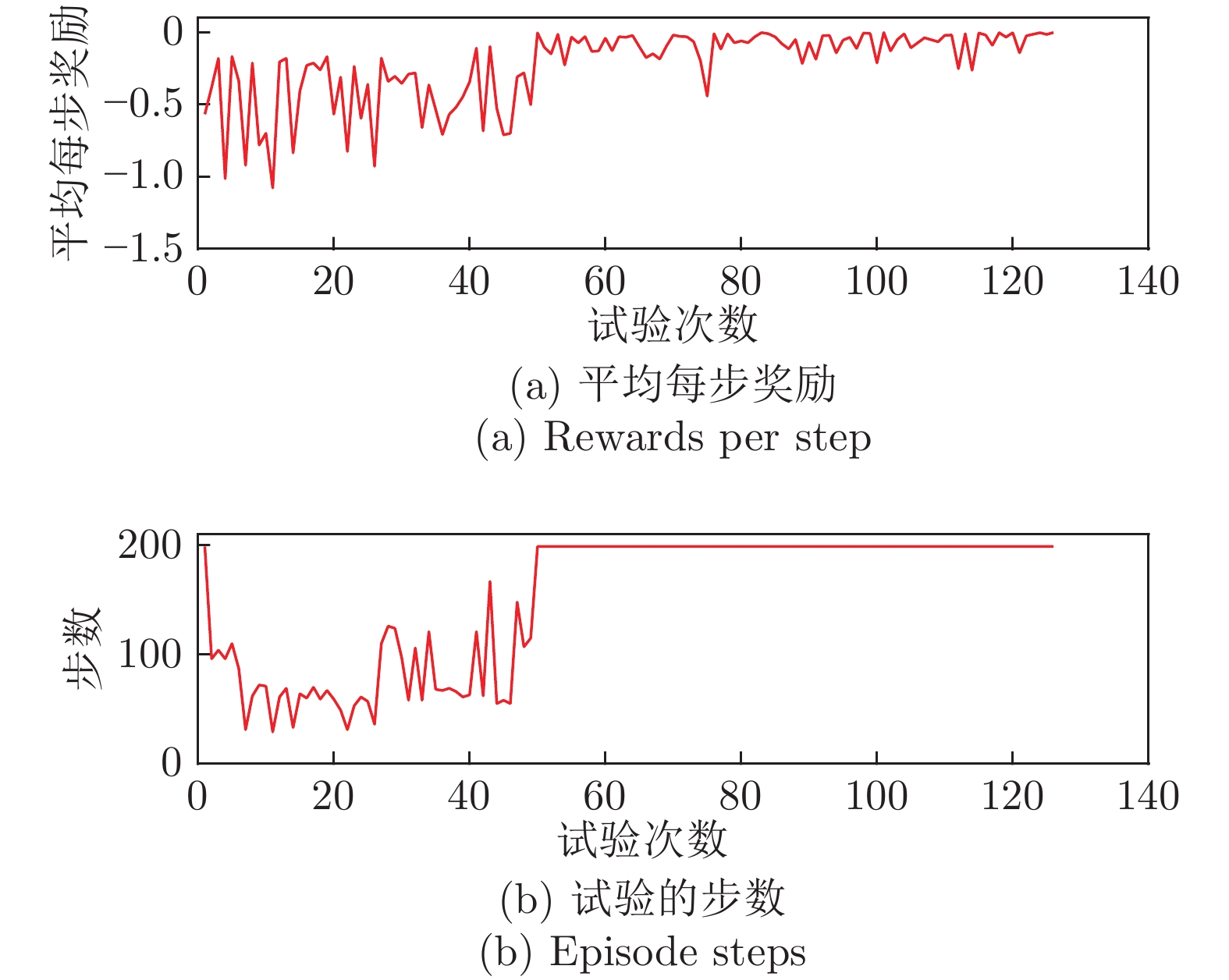
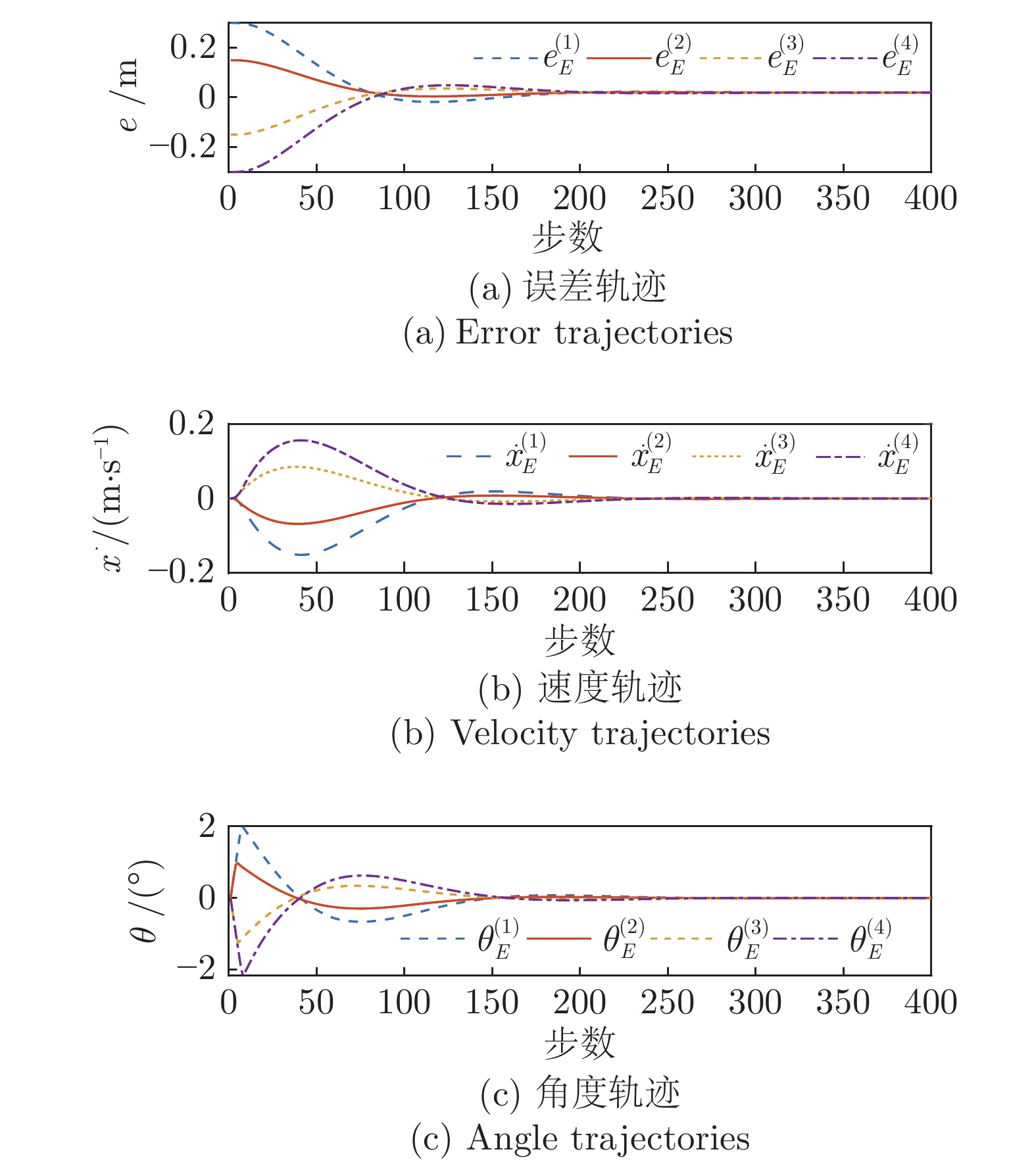
提出了一种基于高斯过程回归与深度强化学习的分层人机协作控制方法, 并以人机协作控制球杆系统为例检验该方法的高效性. 主要贡献是: 1)在模型未知的情况下, 采用深度强化学习算法设计了一种有效的非线性次优控制策略, 并将其作为顶层期望控制策略以引导分层人机协作控制过程, 解决了传统控制方法无法直接应用于模型未知人机协作场景的问题; 2)针对分层人机协作过程中人未知和随机控制策略带来的不利影响, 采用高斯过程回归拟合人体控制策略以建立机器人对人控制行为的认知模型, 在减弱该不利影响的同时提升机器人在协作过程中的主动性, 从而进一步提升协作效率; 3)利用所得认知模型和期望控制策略设计机器人末端速度的控制律, 并通过实验对比验证了所提方法的有效性.
提出了一种基于高斯过程回归与深度强化学习的分层人机协作控制方法, 并以人机协作控制球杆系统为例检验该方法的高效性. 主要贡献是: 1)在模型未知的情况下, 采用深度强化学习算法设计了一种有效的非线性次优控制策略, 并将其作为顶层期望控制策略以引导分层人机协作控制过程, 解决了传统控制方法无法直接应用于模型未知人机协作场景的问题; 2)针对分层人机协作过程中人未知和随机控制策略带来的不利影响, 采用高斯过程回归拟合人体控制策略以建立机器人对人控制行为的认知模型, 在减弱该不利影响的同时提升机器人在协作过程中的主动性, 从而进一步提升协作效率; 3)利用所得认知模型和期望控制策略设计机器人末端速度的控制律, 并通过实验对比验证了所提方法的有效性.