

Full- and Reduced-order Observer Design for Systems With Both the Unknown Inputs and Measurement Disturbances
-
摘要: 针对同时含有未知输入和测量干扰的不确定系统研究了全维和降维观测器设计问题. 首先, 利用待定系数法给出了全维观测器的结构和存在条件. 该条件完全由原系统的系统矩阵给出, 易于检验. 对于降维观测器, 为了消除测量干扰的影响, 提出了一种新的测量输出构造方法, 使得新构造的测量输出不再包含干扰信号. 此外, 证明了全维和降维观测器存在条件的内在统一性, 即全维观测器所需要满足的观测器匹配条件和强可检测条件在研究降维观测器所要讨论的新的系统中都可以得到保持. 因而, 在全维观测器存在条件下, 也可以设计一个相应的降维观测器. 最后, 给出了一个数值例子验证所提方法的有效性.Abstract: The present paper is concerned with the full-order and reduced-order observer designs for uncertain systems with unknown inputs and measurement disturbances. Firstly, the structure and existence conditions of the full-order observer are given by the undetermined coefficient method. This condition is completely given by the system matrices of the original system and is easy to test. For the reduced-order observer, in order to eliminate the influence of measurement disturbances, a new measurement output construction method is proposed in which the newly constructed measurement output no longer contains disturbance signals. In addition, the consistency of the existence conditions between the full-order and the reduced-order observers is proved. That is, the observer matching condition and strong detectable condition that the full-order observer needs to satisfy can be maintained in the new system to be discussed in the reduced-order observer design. Therefore, under the existence condition of the full-order observer, we can also design a corresponding reduced-order observer. Finally, a numerical example is given to verify the effectiveness of the proposed method.
-
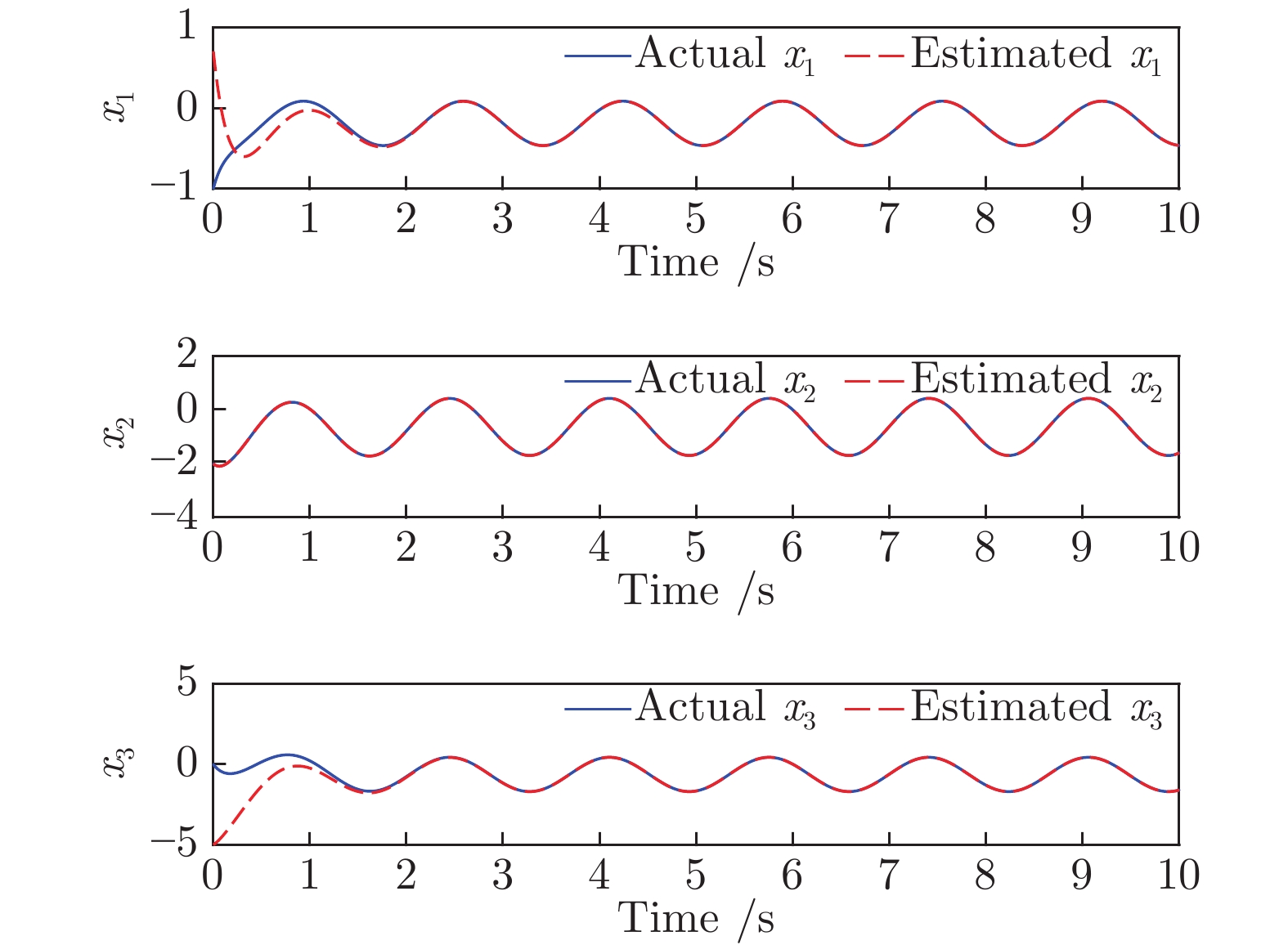
图 2 系统状态及其估计(降维观测器)
Fig. 2 Actual states and their estimations (reduced-order observer)
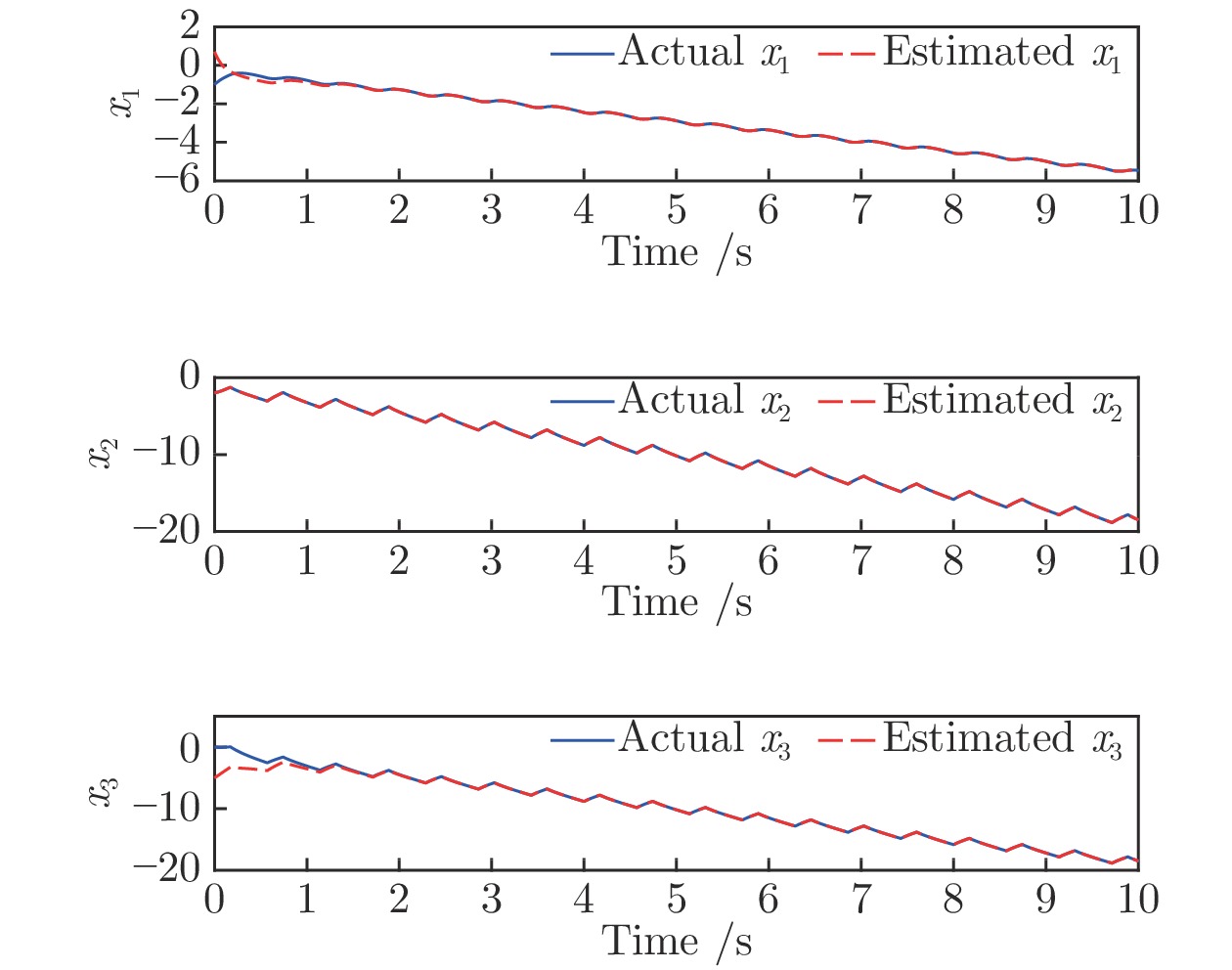
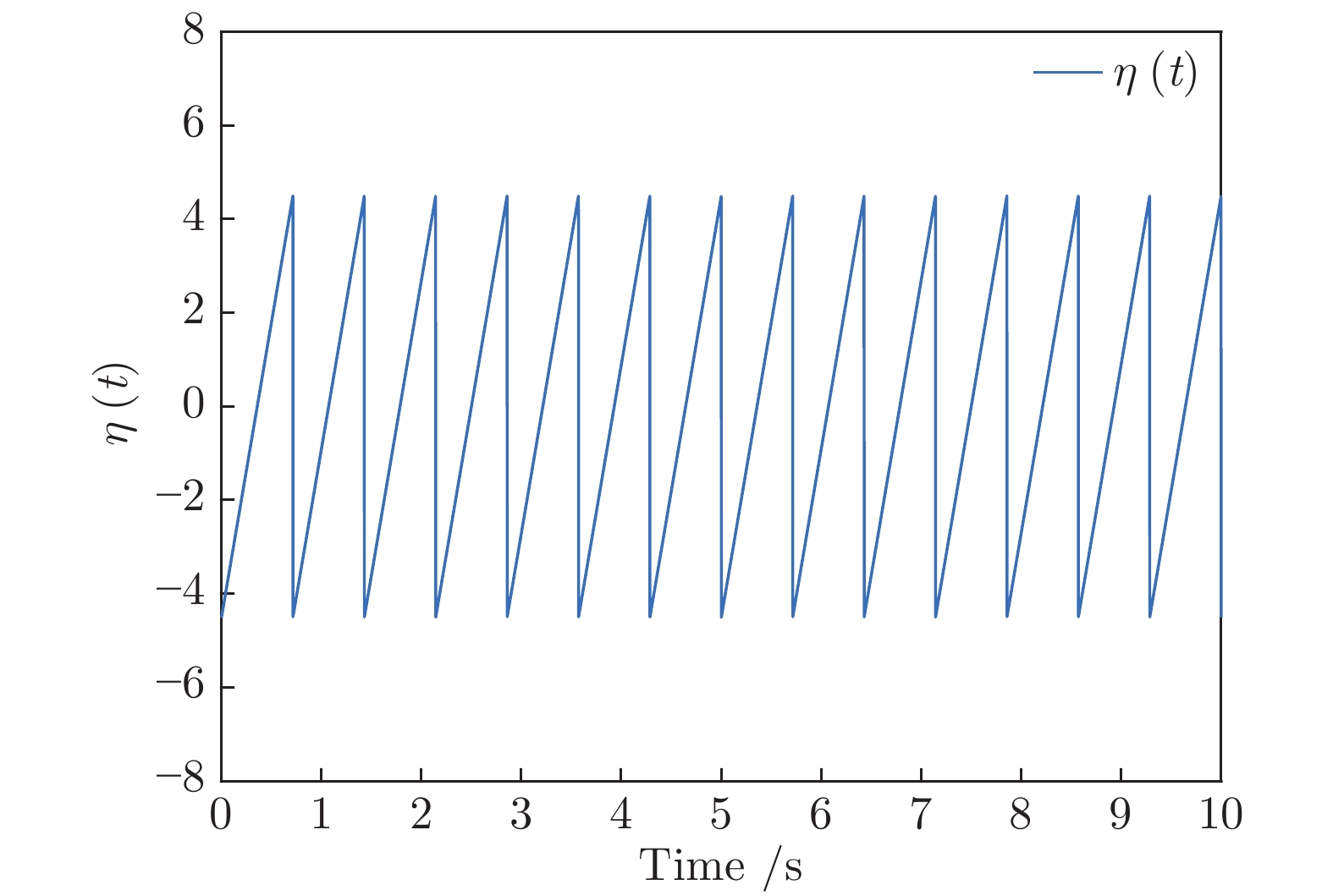
图 5 方波和锯齿干扰信号下的状态估计
Fig. 5 State estimations under square wave and sawtooth disturbance signals

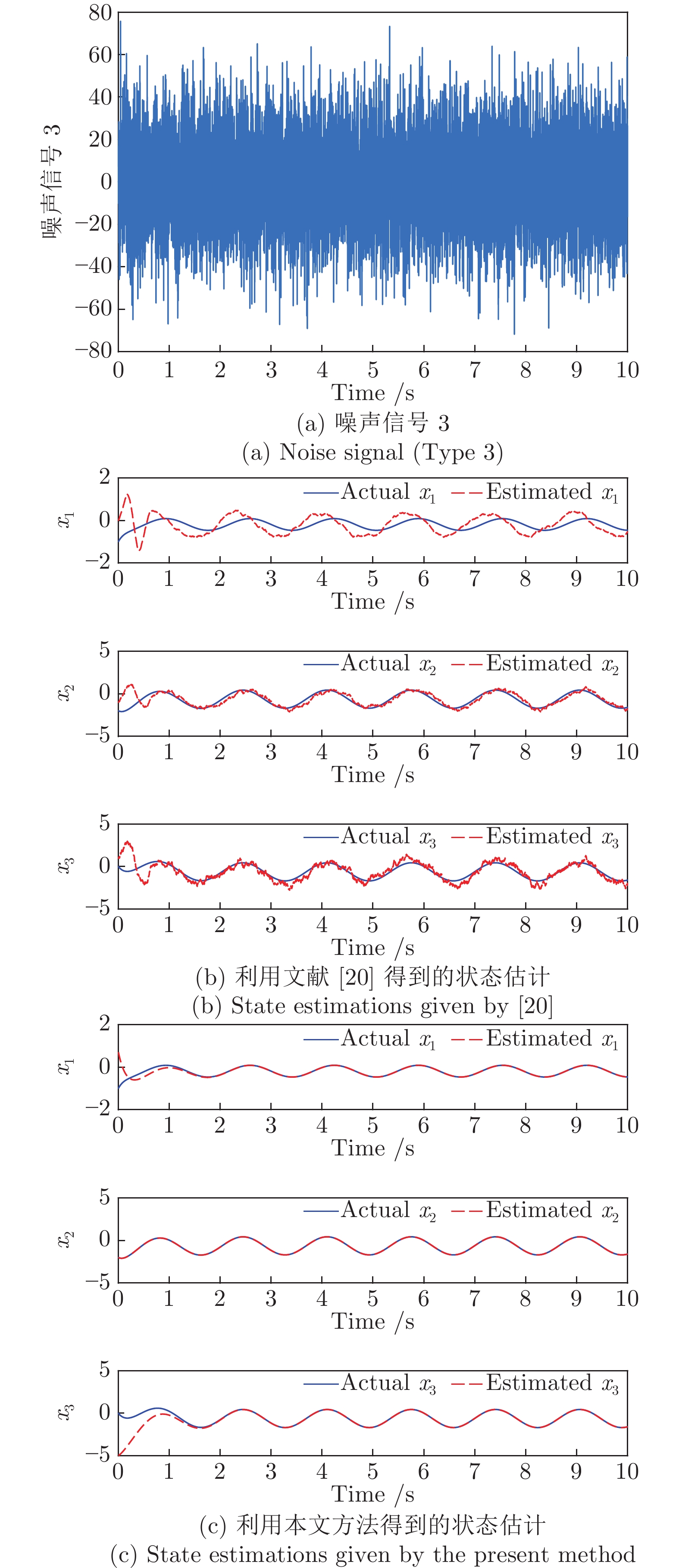
图 6 在受到噪声信号1影响下的状态估计
Fig. 6 State estimations under the influence of noise signal (Type l)
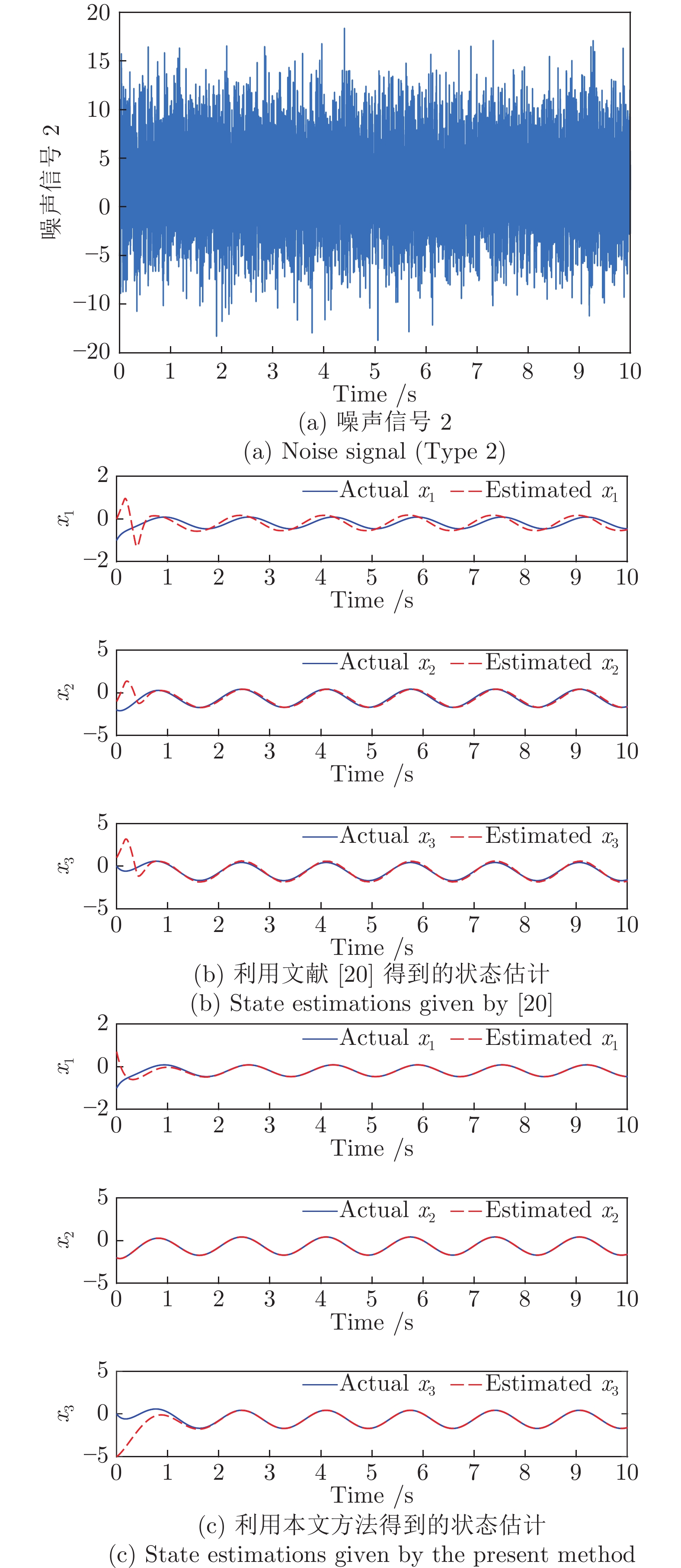
图 7 在受到噪声信号2影响下的状态估计
Fig. 7 State estimations under the influence of noise signal (Type 2)
-
[1] Zhang J, Zhu F. On the observer matching condition and unknown input observer design based on the system left-invertibility concept. Transactions of the Institute of Measurement and Control, 2018, 40(9): 2887-2900 doi: 10.1177/0142331217711494 [2] Zhang J C, Zhao X D, Zhu F L, Karimi H R. Reduced-order observer design for switched descriptor systems with unknown inputs. IEEE Transactions on Automatic Control, doi: 10.1109/TAC.2019.2913050 [3] Zhang J, Chadli M, Wang Y. A fixed-time observer for discrete-time singular systems with unknown inputs. Applied Mathematics and Computation, 2019, 363: 124586 doi: 10.1016/j.amc.2019.124586 [4] Zhang J, Chadli M, Zhu F. Finite-time observer design for singular systems subject to unknown inputs. IET Control Theory & Applications, 2019, 13(14): 2289-2299 [5] Corless M, Tu J. State and input estimation for a class of uncertain systems. Automatica, 1998, 34(6): 757-764 doi: 10.1016/S0005-1098(98)00013-2 [6] 汤文涛, 王振华, 王烨, 沈毅. 基于未知输入集员滤波器的不确定系统故障诊断. 自动化学报, 2018, 44(9): 1717-1724Tang Wen-Tao, Wang Zhen-Hua, Wang Ye, Shen Yi. Fault diagnosis for uncertain systems based on unknown input set-membership fllters. Acta Automatica Sinica, 2018, 44(9): 1717-1724 [7] 文传博, 邓露, 吴兰. 基于滑模观测器和广义观测器的故障估计方法. 自动化学报, 2018, 44(9): 1698-1705Wen Chuan-Bo, Deng Lu, Wu Lan. Fault estimation approaches with sliding mode observer and descriptor observer. Acta Automatica Sinica, 2018, 44(9): 1698-1705 [8] Li X, Zhu F, Chakrabarty A, Zak S H. Nonfragile fault-tolerant fuzzy observer-based controller design for nonlinear systems. IEEE Transactions on fuzzy systems, 2016, 24(6): 1679-1689 doi: 10.1109/TFUZZ.2016.2540070 [9] Zhu F, Xu J, Chen M. The combination of high-gain sliding mode observers used as receivers in secure communication. IEEE Transactions on Circuits and Systems I: Regular Papers, 2012, 59(11): 2702-2712 doi: 10.1109/TCSI.2012.2190570 [10] 胡志坤, 孙岩, 姜斌, 何静, 张昌凡. 一种基于最优未知输入观测器的故障诊断方法. 自动化学报, 2013, 39(8): 1225-1230Hu Zhi-Kun, Sun Yan, Jiang Bin, He Jing, Zhang Chang-Fan. An optimal unknown input observer based fault diagnosis method. Acta Automatica Sinica, 2013, 39(8): 1225-1230 [11] Zhang J, Zhu F. Observer-based output consensus of a class of heterogeneous multi-agent systems with unmatched disturbances. Communications in Nonlinear Science and Numerical Simulation, 2018, 56: 240-251 doi: 10.1016/j.cnsns.2017.08.007 [12] Zhang J C, Zhu F L, Karimi H R, Wang F N. Observer-based sliding mode control for T-S fuzzy descriptor systems with time-delay. IEEE Transactions on Fuzzy Systems, doi: 10.1109/TFUZZ.2019.2893220 [13] Luenberger D G. Observing the state of a linear system. IEEE transactions on military electronics, 1964, 8(2): 74-80 doi: 10.1109/TME.1964.4323124 [14] Kudva P, Viswanadham N, Ramakrishna A. Observers for linear systems with unknown inputs. IEEE Transactions on Automatic Control, 1980, 25(1): 113-115 doi: 10.1109/TAC.1980.1102245 [15] Zhu F. State estimation and unknown input reconstruction via both reduced-order and high-order sliding mode observers. Journal of Process Control, 2012, 22(1): 296-302 doi: 10.1016/j.jprocont.2011.07.007 [16] Zhang J, Zhu F, Zhao X, Wang F N. Robust impulsive reset observers of a class of switched nonlinear systems with unknown inputs. Journal of the Franklin Institute, 2017, 354(7): 2924-2943 doi: 10.1016/j.jfranklin.2017.01.032 [17] 朱芳来, 蔡明, 郭胜辉. 离散切换系统观测器存在性讨论及降维观测器设计. 自动化学报, 2017, 43(12): 2091-2099Zhu Fang-Lai, Cai Ming, Guo Sheng-Hui. Discussions on existences of observers and reduced-order observer design for discrete-time switched systems. Acta Automatica Sinica, 2017, 43(12): 2091-2099 [18] 韩冬, 朱芳来. 基于辅助输出的线性系统状态和未知输入同时估计方法. 自动化学报, 2012, 38(6): 932-943Han Dong, Zhu Fang-Lai. Simultaneous estimation of states and unknown inputs for linear systems. Acta Automatica Sinica, 2012, 38(6): 932-943 [19] Dimassi H, Loria A, Belghith S. Continuously-implemented sliding-mode adaptive unknown-input observers under noisy measurements. Systems & Control Letters, 2012, 61(12): 1194-1202 [20] Yang J, Zhu F, Sun X. State estimation and simultaneous unknown input and measurement noise reconstruction based on associated observers. International Journal of Adaptive Control and Signal Processing, 2013, 27(10): 846-858 [21] Gao Z, Ding S X. State and disturbance estimator for time-delay systems with application to fault estimation and signal compensation. IEEE Transactions on Signal Processing, 2007, 55(12): 5541-5551 doi: 10.1109/TSP.2007.900154 [22] Mondal S, Chakraborty G, Bhattacharyy K. LMI approach to robust unknown input observer design for continuous systems with noise and uncertainties. International Journal of control, Automation and systems, 2010, 8(2): 210-219 doi: 10.1007/s12555-010-0205-9 [23] Li X, Zhu F, Zhang J. State estimation and simultaneous unknown input and measurement noise reconstruction based on adaptive H∞ observer. International Journal of Control, Automation and Systems, 2016, 14(3): 647-654 doi: 10.1007/s12555-015-0006-2 -

 下载:
下载:


计量
- 文章访问数: 838
- HTML全文浏览量: 148
- PDF下载量: 298
- 被引次数: 0
