2018年 第44卷 第8期
2018, 44(8): 1345-1369.
doi: 10.16383/j.aas.2018.c170246
cstr: 32138.14.j.aas.2018.c170246
摘要:
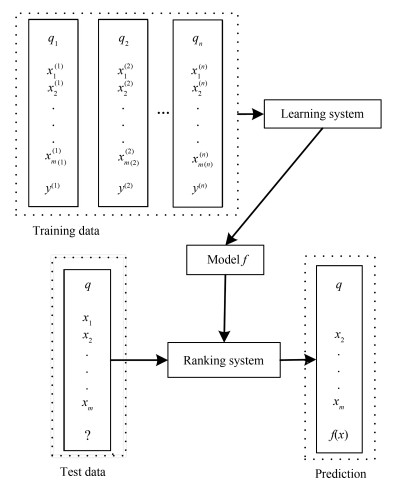
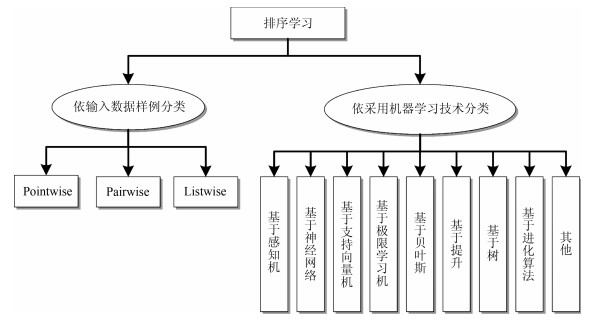
排序学习利用机器学习技术去训练排序模型以解决排序问题,是信息检索与机器学习交叉领域的一个新兴研究热点.越来越多的排序学习方法已经应用于实际系统中,如搜索引擎和推荐系统等.本文概括了排序学习的研究进展,并进行展望.首先,阐述了排序学习问题.然后,对排序学习方法进行了分类,并重点分析了依据训练排序模型时所采用的不同机器学习技术的排序学习方法类别.本文还介绍了一些代表性的标准排序学习数据集,对排序学习方法在若干领域的成功应用进行了总结,并归纳了一些排序学习方法软件包.最后,对排序学习的未来发展趋势和挑战进行了展望和探讨.
排序学习利用机器学习技术去训练排序模型以解决排序问题,是信息检索与机器学习交叉领域的一个新兴研究热点.越来越多的排序学习方法已经应用于实际系统中,如搜索引擎和推荐系统等.本文概括了排序学习的研究进展,并进行展望.首先,阐述了排序学习问题.然后,对排序学习方法进行了分类,并重点分析了依据训练排序模型时所采用的不同机器学习技术的排序学习方法类别.本文还介绍了一些代表性的标准排序学习数据集,对排序学习方法在若干领域的成功应用进行了总结,并归纳了一些排序学习方法软件包.最后,对排序学习的未来发展趋势和挑战进行了展望和探讨.
2018, 44(8): 1370-1380.
doi: 10.16383/j.aas.2018.c170258
cstr: 32138.14.j.aas.2018.c170258
摘要:
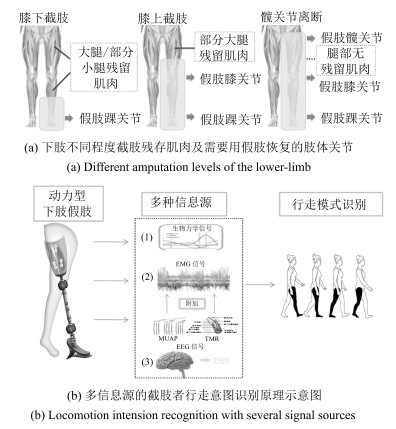
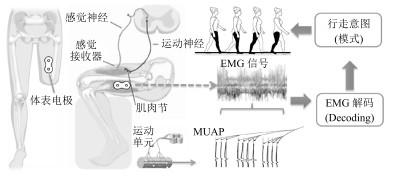
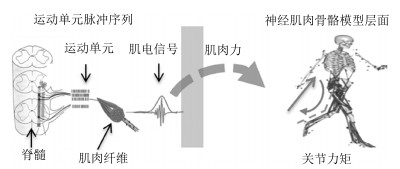
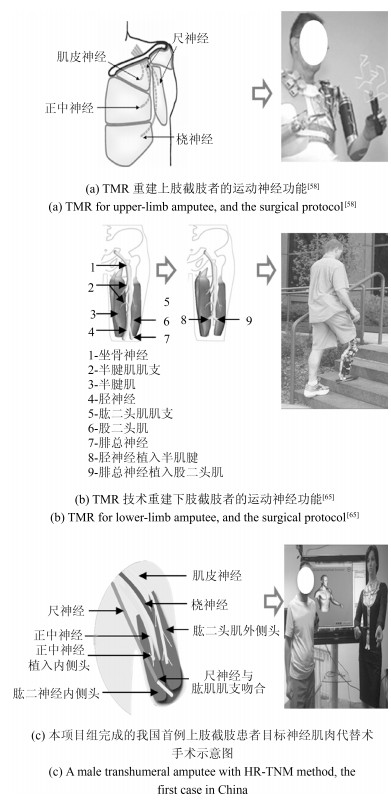
直立行走是人类独立生活和正常参与社会活动的基本功能之一.人因遭受工伤、交通事故、战争、自然灾害(地震等)、疾病(糖尿病、癌症等)、先天出生缺陷等意外和不幸造成下肢截肢,从而部分或全部丧失行走能力,严重影响正常生活和参与社会活动.下肢假肢是下肢截肢者恢复行走功能的唯一手段,其技术发展吸引了众多研究者的关注.为使下肢假肢使用者能像正常腿一样或接近的步态行走,关键是实现截肢者行走意图的自动精确识别.本文首先探索了行走意图识别的内涵;然后从信号源的角度分析了不同截肢者行走意图识别方法的特点,尤其是神经功能重建作为补充的肌电信号(Electromyography,EMG)源的方法,并简述其研究进展,提出了一种融合生物力学信号和生物电信号的截肢者行走意图识别方法;最后对下肢截肢者行走意图识别方法发展趋势进行了总结和展望.
直立行走是人类独立生活和正常参与社会活动的基本功能之一.人因遭受工伤、交通事故、战争、自然灾害(地震等)、疾病(糖尿病、癌症等)、先天出生缺陷等意外和不幸造成下肢截肢,从而部分或全部丧失行走能力,严重影响正常生活和参与社会活动.下肢假肢是下肢截肢者恢复行走功能的唯一手段,其技术发展吸引了众多研究者的关注.为使下肢假肢使用者能像正常腿一样或接近的步态行走,关键是实现截肢者行走意图的自动精确识别.本文首先探索了行走意图识别的内涵;然后从信号源的角度分析了不同截肢者行走意图识别方法的特点,尤其是神经功能重建作为补充的肌电信号(Electromyography,EMG)源的方法,并简述其研究进展,提出了一种融合生物力学信号和生物电信号的截肢者行走意图识别方法;最后对下肢截肢者行走意图识别方法发展趋势进行了总结和展望.


2018, 44(8): 1381-1390.
doi: 10.16383/j.aas.2017.c170140
cstr: 32138.14.j.aas.2017.c170140
摘要:
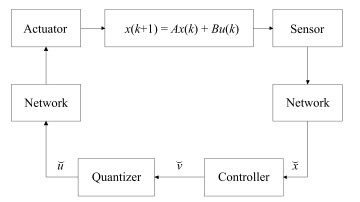
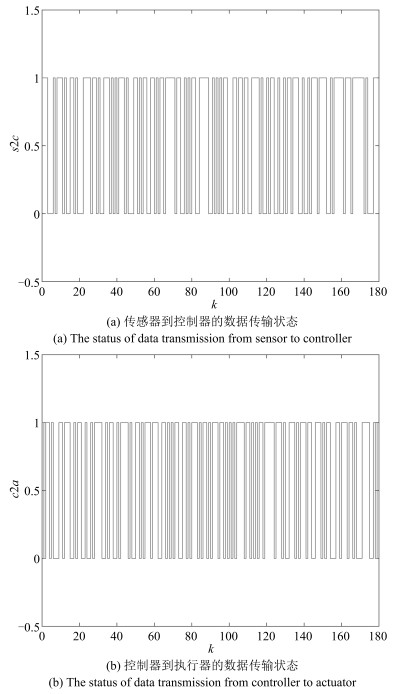
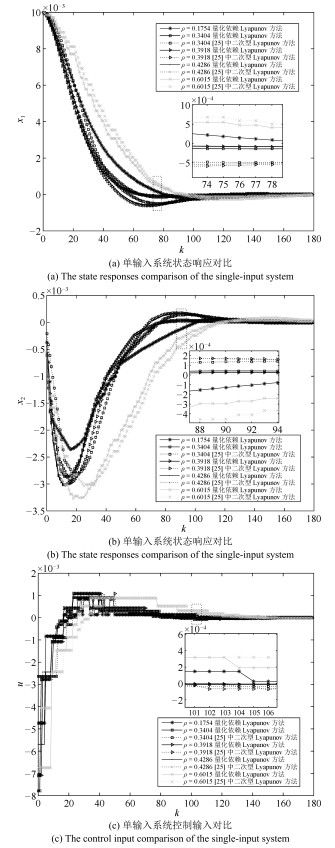
研究了一类具有有界丢包的网络控制系统(Networked control systems,NCSs)的保成本控制问题,提出了一种包含量化反馈的网络控制系统数学模型,该模型将系统的镇定问题转化为镇定一系列子系统的鲁棒控制问题.在对网络控制系统的分析中,区别于常用的二次型Lyapunov函数,本文采用了一种新的且能够降低保守性的量化依赖Lyapunov函数方法.基于本文的Lyapunov函数,得到了充分考虑丢包过程的保成本控制器的设计方法.仿真算例验证了所给出方法的有效性.
研究了一类具有有界丢包的网络控制系统(Networked control systems,NCSs)的保成本控制问题,提出了一种包含量化反馈的网络控制系统数学模型,该模型将系统的镇定问题转化为镇定一系列子系统的鲁棒控制问题.在对网络控制系统的分析中,区别于常用的二次型Lyapunov函数,本文采用了一种新的且能够降低保守性的量化依赖Lyapunov函数方法.基于本文的Lyapunov函数,得到了充分考虑丢包过程的保成本控制器的设计方法.仿真算例验证了所给出方法的有效性.

2018, 44(8): 1391-1404.
doi: 10.16383/j.aas.2018.c170463
cstr: 32138.14.j.aas.2018.c170463
摘要:
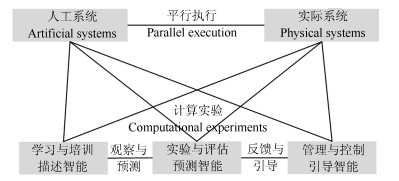
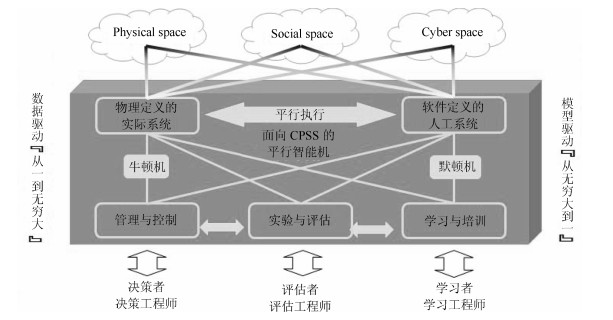
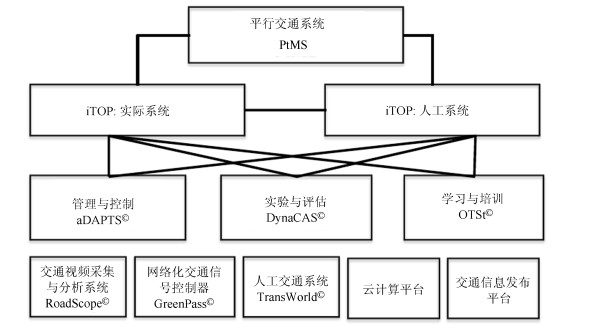
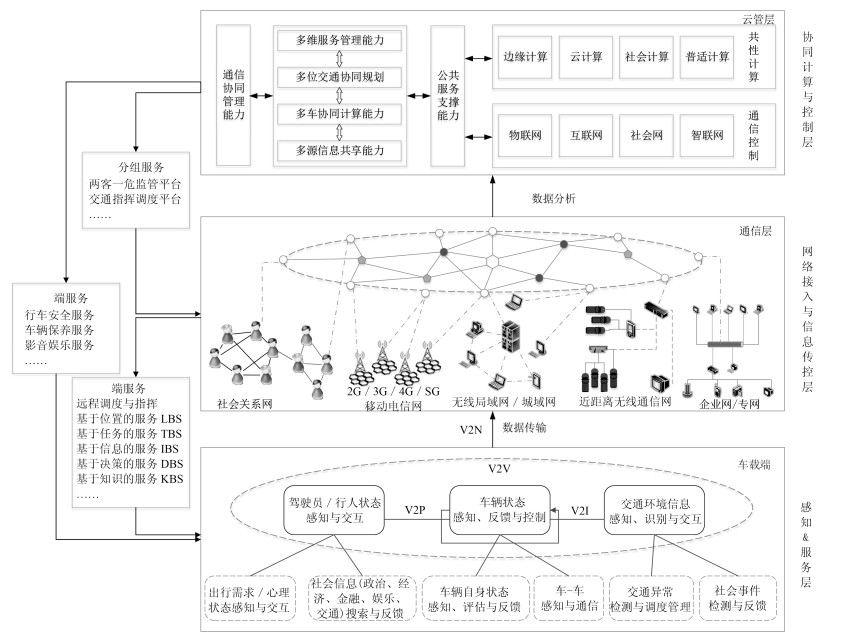
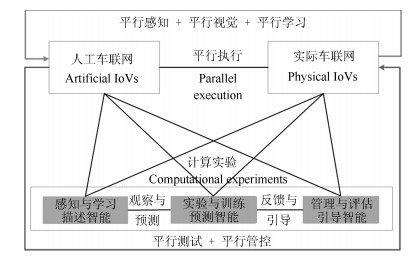
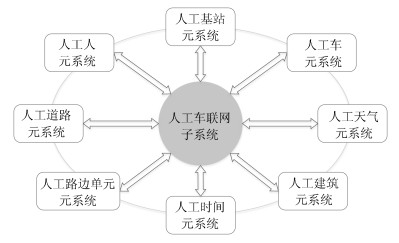
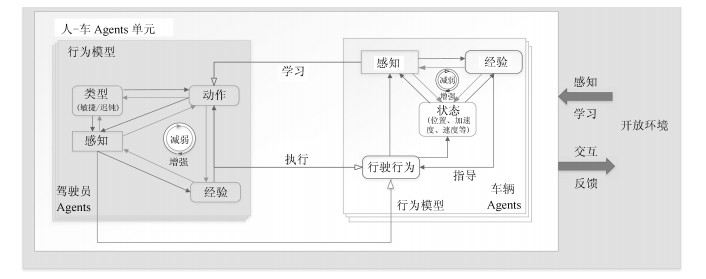
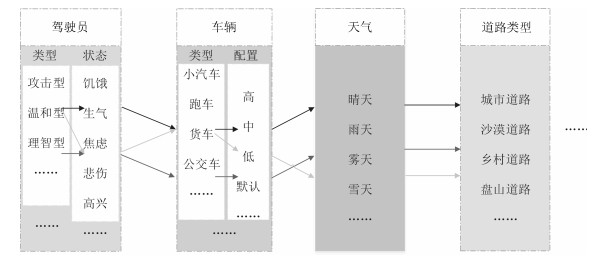
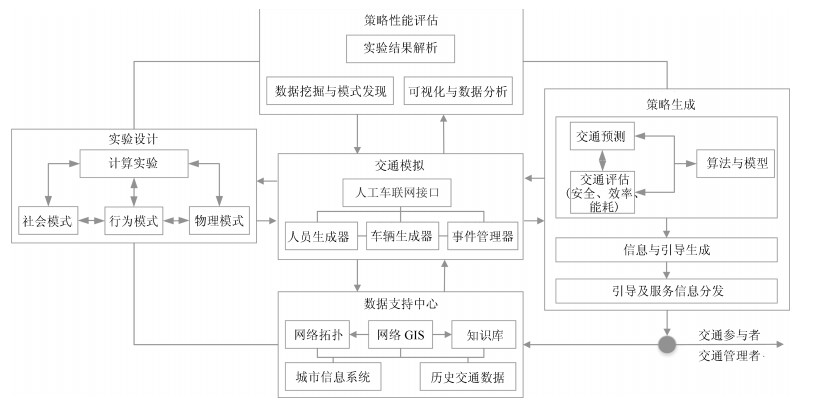
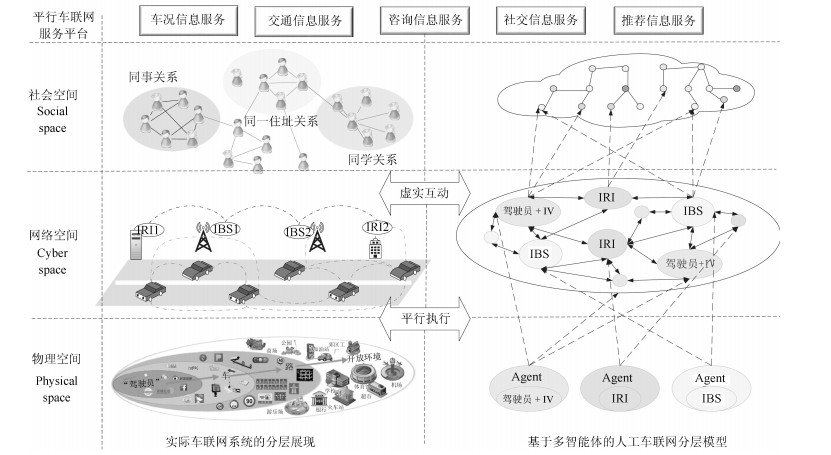
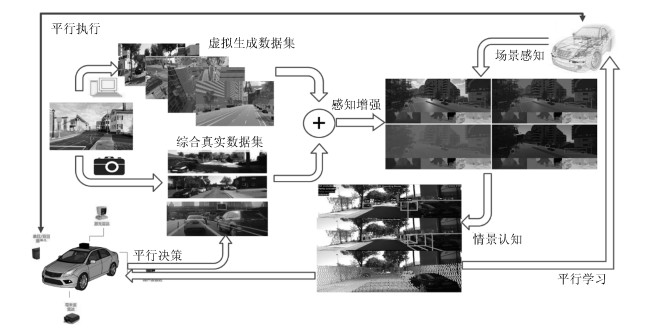
本文将平行智能方法引入智能车辆的网联化管理与控制, 提出平行车联网的概念、框架、功能与流程.平行车联网致力于通过人工车联网与物理车联网的虚实互动、协同演化与闭环反馈, 为人-车-路-智能交通信息网一体化的智能交通系统增加计算实验与平行引导的功能, 实现描述、预测与引导相结合的车联网智能, 有效解决异构、移动、融合的交通网络环境下智能车辆的管理与控制问题.
本文将平行智能方法引入智能车辆的网联化管理与控制, 提出平行车联网的概念、框架、功能与流程.平行车联网致力于通过人工车联网与物理车联网的虚实互动、协同演化与闭环反馈, 为人-车-路-智能交通信息网一体化的智能交通系统增加计算实验与平行引导的功能, 实现描述、预测与引导相结合的车联网智能, 有效解决异构、移动、融合的交通网络环境下智能车辆的管理与控制问题.

2018, 44(8): 1405-1412.
doi: 10.16383/j.aas.2017.c160830
cstr: 32138.14.j.aas.2017.c160830
摘要:
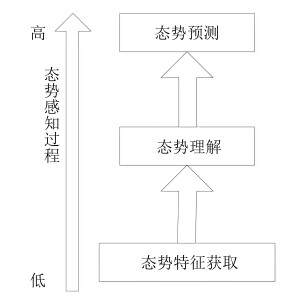
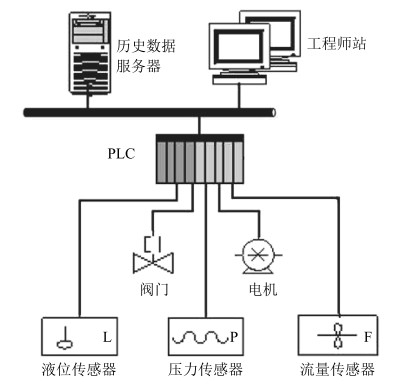
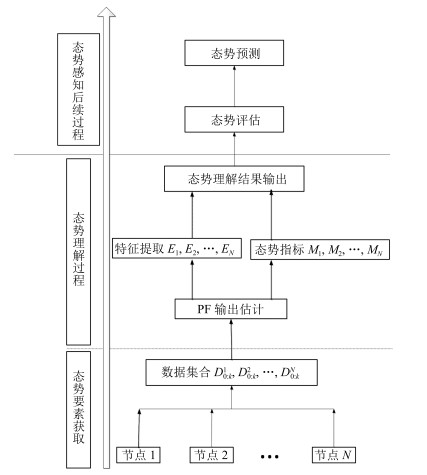
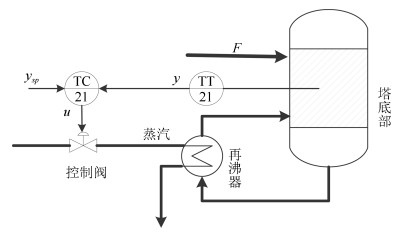
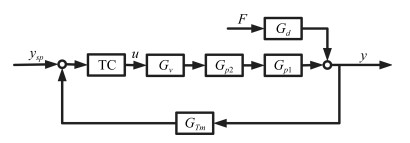
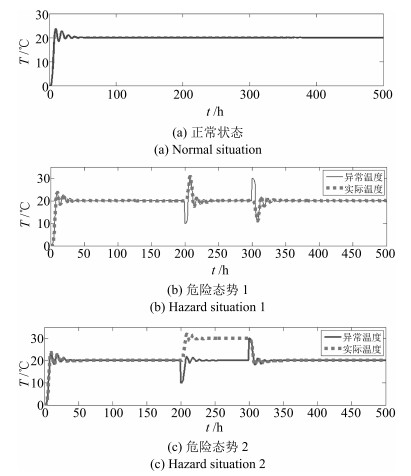
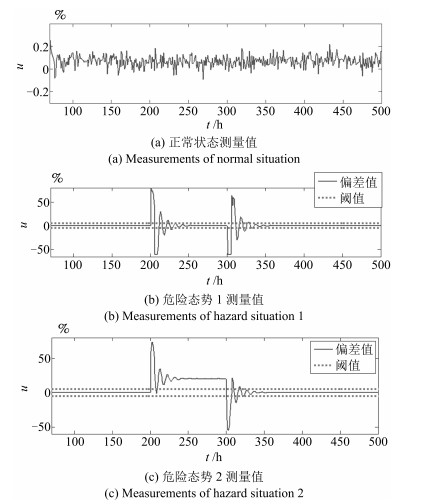
粒子滤波(Particle filtering,PF)算法能有效地对工控系统这一类非线性、非高斯噪声系统进行状态估计,但在实际采用经典粒子滤波状态估计检测攻击时,实验结果显示该方法存在很高的漏检率,无法保障系统安全.因此改进经典算法,提出了基于粒子滤波输入估计的态势理解算法.该算法在考虑系统输入与输出关系的同时,结合蒙特卡洛思想,提取工控系统态势特征,计算态势指标,最终实现态势理解.实验结果表明,该算法能有效地感知持续性攻击,并判断系统态势.
粒子滤波(Particle filtering,PF)算法能有效地对工控系统这一类非线性、非高斯噪声系统进行状态估计,但在实际采用经典粒子滤波状态估计检测攻击时,实验结果显示该方法存在很高的漏检率,无法保障系统安全.因此改进经典算法,提出了基于粒子滤波输入估计的态势理解算法.该算法在考虑系统输入与输出关系的同时,结合蒙特卡洛思想,提取工控系统态势特征,计算态势指标,最终实现态势理解.实验结果表明,该算法能有效地感知持续性攻击,并判断系统态势.

2018, 44(8): 1413-1424.
doi: 10.16383/j.aas.2017.c160693
cstr: 32138.14.j.aas.2017.c160693
摘要:
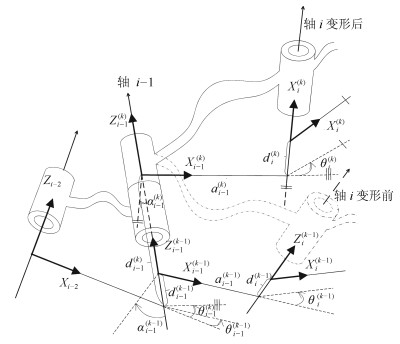
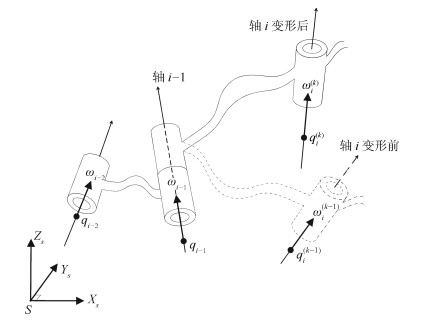
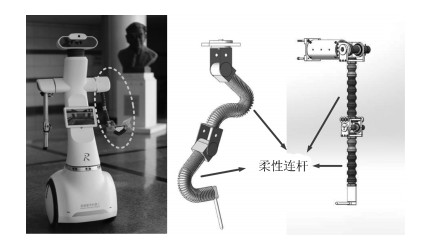
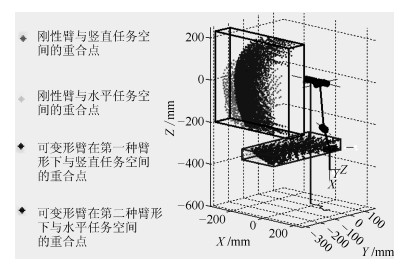
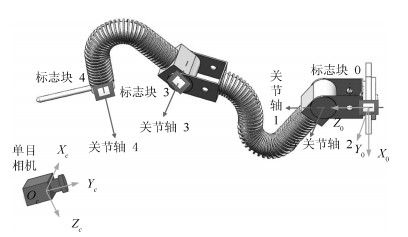
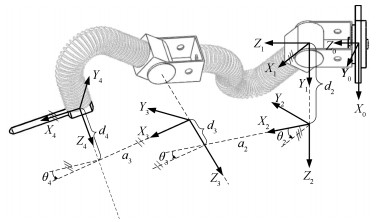
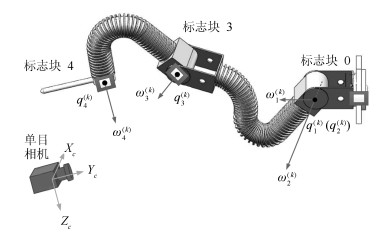
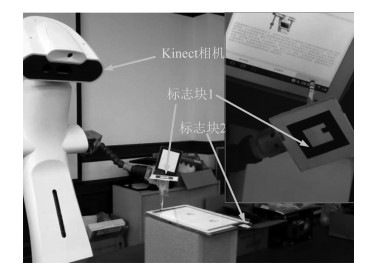
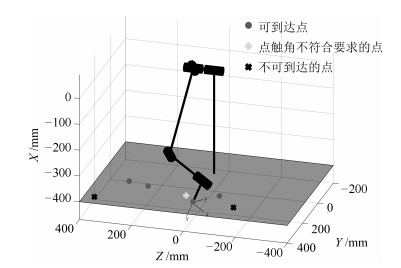
针对家庭服务机器人工作的非结构化环境, 本文设计了一种可以根据任务需求相应地调整连杆形状的可变形操作臂.该操作臂工作空间易于拓展、灵活度较高且成本低廉.但连杆形状的改变给操作臂的建模和控制带来了困难.首先, 可变形臂的运动学参数发生了巨大且无规律的变化, 使得固结在操作臂连杆上的关节坐标系可能脱离操作臂本体, 变得不可测量.其次, 为适应不同任务需求, 可变形臂的连杆形状需要经常改变, 而传统标定方法往往追求更高的标定精度而非标定效率.最后, 可变形臂的标定方法必须低成本且易于在家庭环境中实施, 而基于激光等传感器的标定方法设备价格昂贵, 对实验环境要求严格, 不便于在家庭中实施.因此, 一种廉价、快速、易于实施的标定方法是可变形臂应用的基础.本文分别基于Denavit-Hartenberg(DH)模型和旋量模型提出了基于视觉标志块间相对位姿测量的标定算法, 该算法在标志块处建立虚拟关节, 通过测量不同标志块间的相对位姿可快速、高效地获取可变形臂的运动学参数.实验说明了两种标定方法的有效性, 同时还表明旋量模型更适合可变形臂的建模.最后, 本文给出了利用可变形臂进行点触任务操作的实例, 展示出可变形操作臂在家庭使用中的优势.
针对家庭服务机器人工作的非结构化环境, 本文设计了一种可以根据任务需求相应地调整连杆形状的可变形操作臂.该操作臂工作空间易于拓展、灵活度较高且成本低廉.但连杆形状的改变给操作臂的建模和控制带来了困难.首先, 可变形臂的运动学参数发生了巨大且无规律的变化, 使得固结在操作臂连杆上的关节坐标系可能脱离操作臂本体, 变得不可测量.其次, 为适应不同任务需求, 可变形臂的连杆形状需要经常改变, 而传统标定方法往往追求更高的标定精度而非标定效率.最后, 可变形臂的标定方法必须低成本且易于在家庭环境中实施, 而基于激光等传感器的标定方法设备价格昂贵, 对实验环境要求严格, 不便于在家庭中实施.因此, 一种廉价、快速、易于实施的标定方法是可变形臂应用的基础.本文分别基于Denavit-Hartenberg(DH)模型和旋量模型提出了基于视觉标志块间相对位姿测量的标定算法, 该算法在标志块处建立虚拟关节, 通过测量不同标志块间的相对位姿可快速、高效地获取可变形臂的运动学参数.实验说明了两种标定方法的有效性, 同时还表明旋量模型更适合可变形臂的建模.最后, 本文给出了利用可变形臂进行点触任务操作的实例, 展示出可变形操作臂在家庭使用中的优势.



2018, 44(8): 1425-1435.
doi: 10.16383/j.aas.2017.c160458
cstr: 32138.14.j.aas.2017.c160458
摘要:
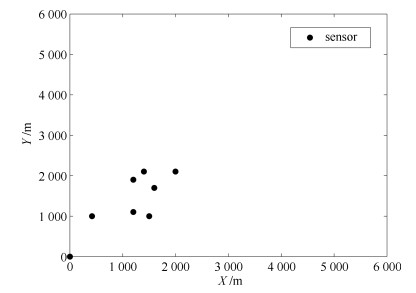
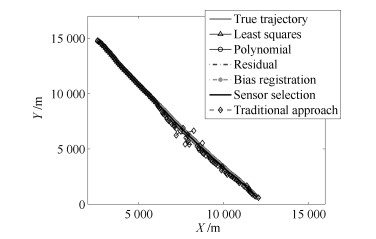
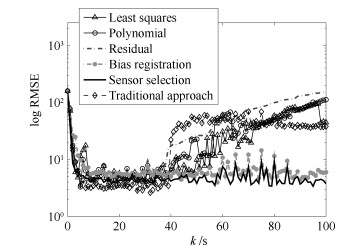
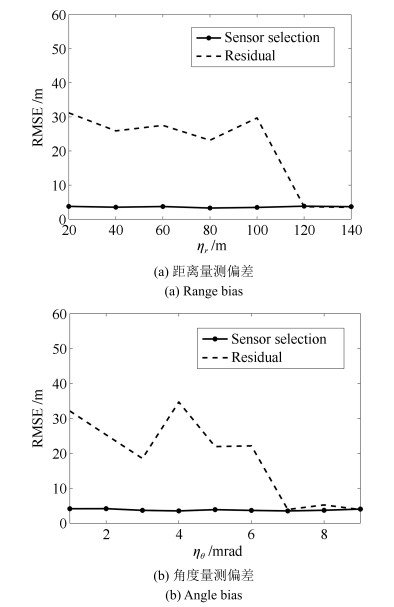
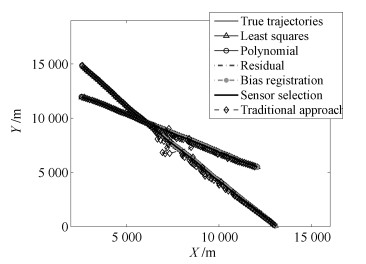
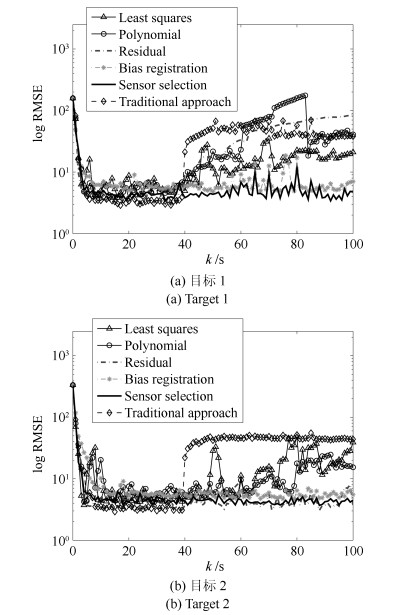
针对大规模传感器网络(Large-scale sensor networks)的目标跟踪问题, 本文在贝叶斯(Bayes)框架下, 提出了一种全新的基于传感器选择的多传感器目标跟踪算法.算法的具体思路为:首先基于Bayes框架, 根据不同的管理目标, 推导出传感器选择的目标函数; 然后根据目标函数, 计算出相应的传感器选择方案; 最后将选择的传感器进行数据融合, 求得传感器网络的目标跟踪结果.相比传统的基于量测野值点剔除思想的目标跟踪算法以及基于系统偏差估计的传感器配准算法, 本文提出的基于传感器选择的多传感器目标跟踪算法不仅目标跟踪精度更高, 且跟踪性能更稳定.同时本文提出的传感器选择算法还可以适用于杂波数目较少的目标跟踪场景.仿真结果说明了本文所提算法的有效性.
针对大规模传感器网络(Large-scale sensor networks)的目标跟踪问题, 本文在贝叶斯(Bayes)框架下, 提出了一种全新的基于传感器选择的多传感器目标跟踪算法.算法的具体思路为:首先基于Bayes框架, 根据不同的管理目标, 推导出传感器选择的目标函数; 然后根据目标函数, 计算出相应的传感器选择方案; 最后将选择的传感器进行数据融合, 求得传感器网络的目标跟踪结果.相比传统的基于量测野值点剔除思想的目标跟踪算法以及基于系统偏差估计的传感器配准算法, 本文提出的基于传感器选择的多传感器目标跟踪算法不仅目标跟踪精度更高, 且跟踪性能更稳定.同时本文提出的传感器选择算法还可以适用于杂波数目较少的目标跟踪场景.仿真结果说明了本文所提算法的有效性.


2018, 44(8): 1436-1445.
doi: 10.16383/j.aas.2017.c170170
cstr: 32138.14.j.aas.2017.c170170
摘要:
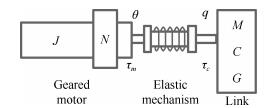
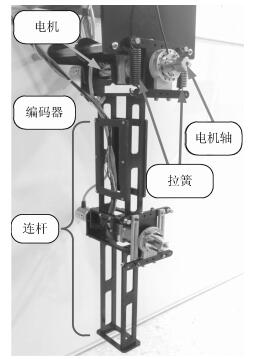
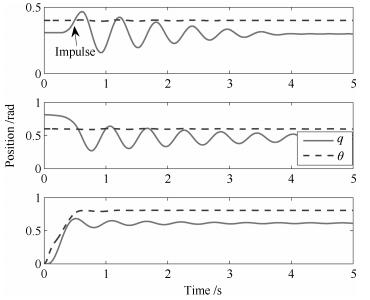
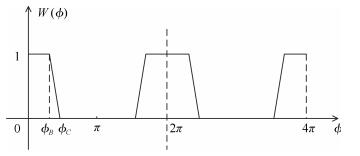
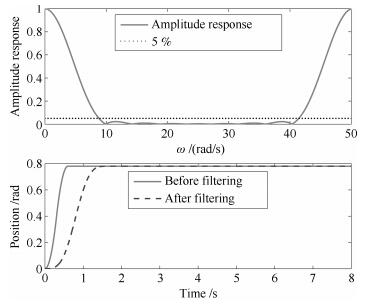
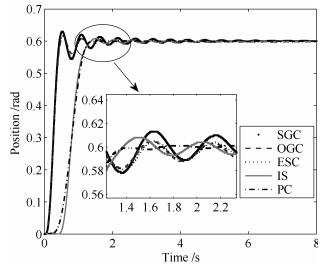
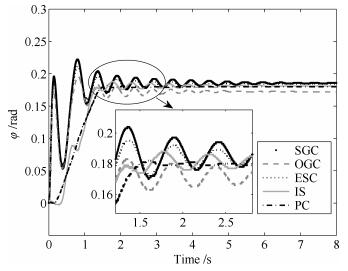
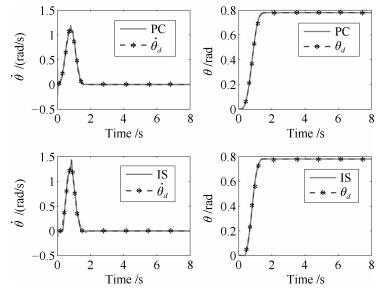
针对串联弹性驱动器(Series elastic actuator,SEA)的位置控制问题,本文提出了一种"规划+控制"的策略.首先根据连杆端运动学约束方程,基于数字滤波器对电机位置进行轨迹规划;为了使电机能够准确跟踪期望轨迹,根据电机端的动力学模型设计位置跟踪控制器.理论分析证明了规划的抖动抑制作用和跟踪控制系统的稳定性,随后的实验结果也表明了这种"规划+控制"方法在使连杆到达期望位置的前提下,能够有效地抑制残余抖动.
针对串联弹性驱动器(Series elastic actuator,SEA)的位置控制问题,本文提出了一种"规划+控制"的策略.首先根据连杆端运动学约束方程,基于数字滤波器对电机位置进行轨迹规划;为了使电机能够准确跟踪期望轨迹,根据电机端的动力学模型设计位置跟踪控制器.理论分析证明了规划的抖动抑制作用和跟踪控制系统的稳定性,随后的实验结果也表明了这种"规划+控制"方法在使连杆到达期望位置的前提下,能够有效地抑制残余抖动.



2018, 44(8): 1446-1459.
doi: 10.16383/j.aas.2018.c170222
cstr: 32138.14.j.aas.2018.c170222
摘要:
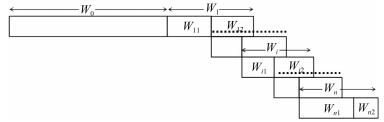
挖掘时态关联规则的目的是为了发现带有时态信息的项集之间有趣的关系.由于数据库经常动态更新,时态关联规则的挖掘也应该适应数据库的更新.然而,现有的大多数算法不仅需要重新挖掘更新的数据库,浪费了大量的时间和效率,而且不能利用已存在的规则定量地预测某些项的变化趋势.本文提出了一个基于多维时态关联规则的演化模糊推理预测建模算法(Evolving fuzzy inference model based on multidimensional temporal association rules,EFI-MTAR),主要优势是构建了一种基于多维时态关联规则的模糊推理建模算法(Fuzzy inference modeling algorithm based on multidimensional temporal association rules,FI-MTAR),实现了对时间序列的定量预测.此外,为了降低规则更新的代价和加快规则预测的速度,提出了概念漂移检测策略来处理时间序列数据以适应数据库的动态更新.实验结果表明了本文提出算法的有效性和准确性.
挖掘时态关联规则的目的是为了发现带有时态信息的项集之间有趣的关系.由于数据库经常动态更新,时态关联规则的挖掘也应该适应数据库的更新.然而,现有的大多数算法不仅需要重新挖掘更新的数据库,浪费了大量的时间和效率,而且不能利用已存在的规则定量地预测某些项的变化趋势.本文提出了一个基于多维时态关联规则的演化模糊推理预测建模算法(Evolving fuzzy inference model based on multidimensional temporal association rules,EFI-MTAR),主要优势是构建了一种基于多维时态关联规则的模糊推理建模算法(Fuzzy inference modeling algorithm based on multidimensional temporal association rules,FI-MTAR),实现了对时间序列的定量预测.此外,为了降低规则更新的代价和加快规则预测的速度,提出了概念漂移检测策略来处理时间序列数据以适应数据库的动态更新.实验结果表明了本文提出算法的有效性和准确性.



2018, 44(8): 1460-1474.
doi: 10.16383/j.aas.2017.c160597
cstr: 32138.14.j.aas.2017.c160597
摘要:
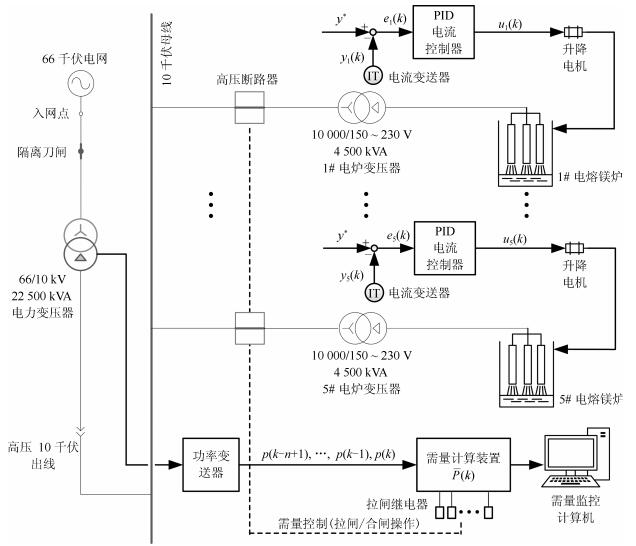
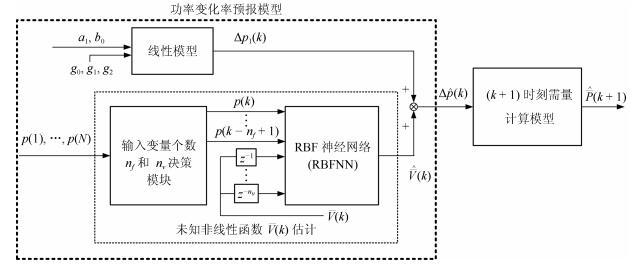
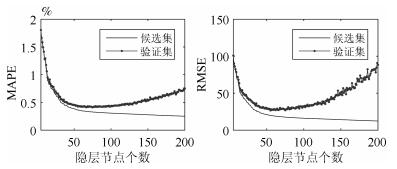
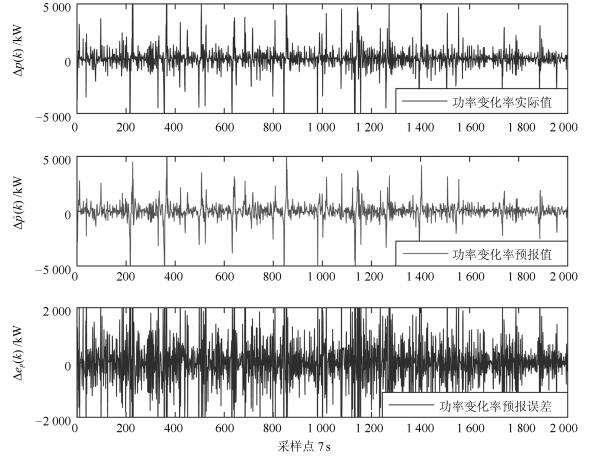
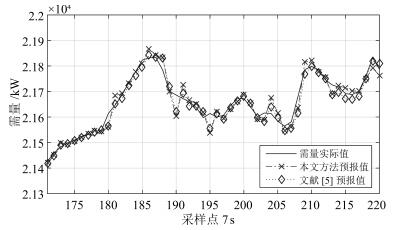
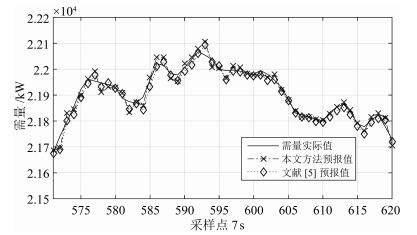
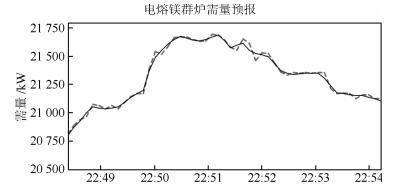
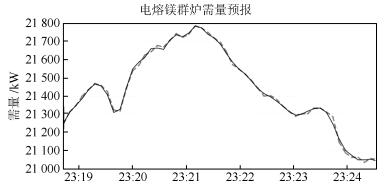
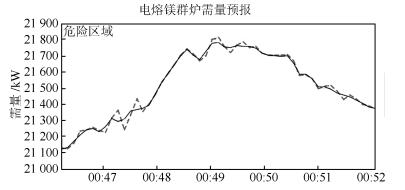
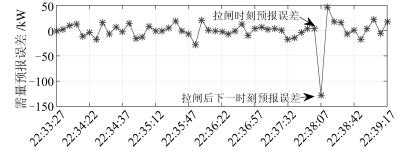
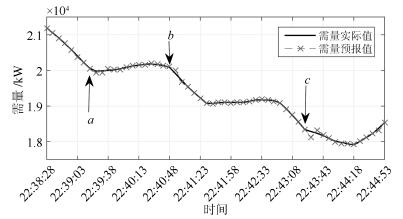
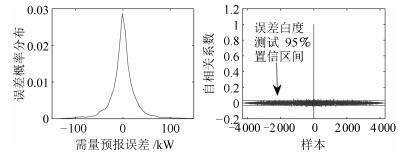
电熔镁群炉需量指当前时刻k和(k-1),…,(k-n+1)时刻群炉功率的平均值,用于度量高耗能电熔镁群炉用电量.(k+1)时刻群炉需量取决于功率变化率.本文建立了功率变化率与电流控制系统输出电流之间由线性项与未知非线性项组成的动态模型,其中线性项通过电流被控对象的参数和控制器的参数计算,未知非线性项采用基于偏自相关函数(Partial autocorrelation function,PACF)输入变量决策的径向基函数神经网络(Radial basis function neural network,RBFNN)来估计.本文提出了由当前k时刻的需量和功率,(k-n+1)时刻功率及k时刻功率变化率的估计组成的(k+1)时刻需量的计算模型.通过某电熔镁砂厂实际数据的仿真实验和工业实验表明所提方法可准确预报需量变化趋势,可以防止因原料变化引起需量尖峰导致错误切断电熔镁炉供电造成电熔镁砂质量降低.
电熔镁群炉需量指当前时刻k和(k-1),…,(k-n+1)时刻群炉功率的平均值,用于度量高耗能电熔镁群炉用电量.(k+1)时刻群炉需量取决于功率变化率.本文建立了功率变化率与电流控制系统输出电流之间由线性项与未知非线性项组成的动态模型,其中线性项通过电流被控对象的参数和控制器的参数计算,未知非线性项采用基于偏自相关函数(Partial autocorrelation function,PACF)输入变量决策的径向基函数神经网络(Radial basis function neural network,RBFNN)来估计.本文提出了由当前k时刻的需量和功率,(k-n+1)时刻功率及k时刻功率变化率的估计组成的(k+1)时刻需量的计算模型.通过某电熔镁砂厂实际数据的仿真实验和工业实验表明所提方法可准确预报需量变化趋势,可以防止因原料变化引起需量尖峰导致错误切断电熔镁炉供电造成电熔镁砂质量降低.





2018, 44(8): 1475-1485.
doi: 10.16383/j.aas.2017.c160433
cstr: 32138.14.j.aas.2017.c160433
摘要:
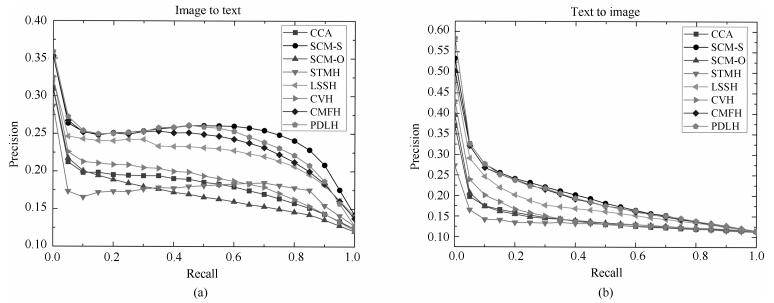
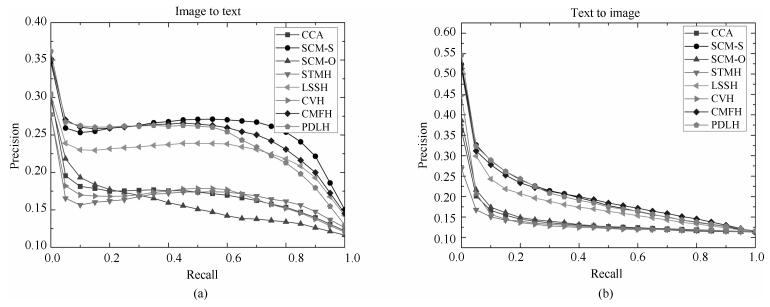
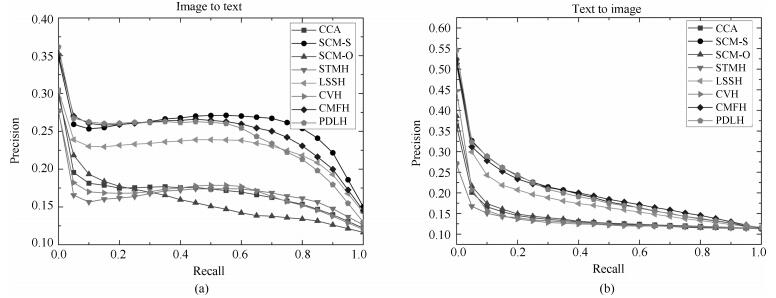
针对网络上出现越来越多的多模态数据,如何在海量数据中检索不同模态的数据成为一个新的挑战.哈希方法把数据映射到Hamming空间,大大降低了计算复杂度,为海量数据的跨模态检索提供了一条有效的路径.然而,大部分现存方法生成的哈希码不包含任何语义信息,从而导致算法性能的下降.为了解决这个问题,本文提出一种基于映射字典学习的跨模态哈希检索算法.首先,利用映射字典学习一个共享语义子空间,在子空间保持数据模态间的相似性.然后,提出一种高效的迭代优化算法得到哈希函数,但是可以证明问题的解并不是唯一的.因此,本文提出通过学习一个正交旋转矩阵最小化量化误差,得到性能更好的哈希函数.最后,在两个公开数据集上的实验结果说明了该算法优于其他现存方法.
针对网络上出现越来越多的多模态数据,如何在海量数据中检索不同模态的数据成为一个新的挑战.哈希方法把数据映射到Hamming空间,大大降低了计算复杂度,为海量数据的跨模态检索提供了一条有效的路径.然而,大部分现存方法生成的哈希码不包含任何语义信息,从而导致算法性能的下降.为了解决这个问题,本文提出一种基于映射字典学习的跨模态哈希检索算法.首先,利用映射字典学习一个共享语义子空间,在子空间保持数据模态间的相似性.然后,提出一种高效的迭代优化算法得到哈希函数,但是可以证明问题的解并不是唯一的.因此,本文提出通过学习一个正交旋转矩阵最小化量化误差,得到性能更好的哈希函数.最后,在两个公开数据集上的实验结果说明了该算法优于其他现存方法.


2018, 44(8): 1486-1495.
doi: 10.16383/j.aas.2017.c160778
cstr: 32138.14.j.aas.2017.c160778
摘要:
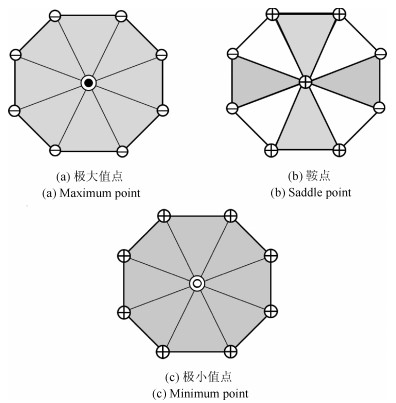
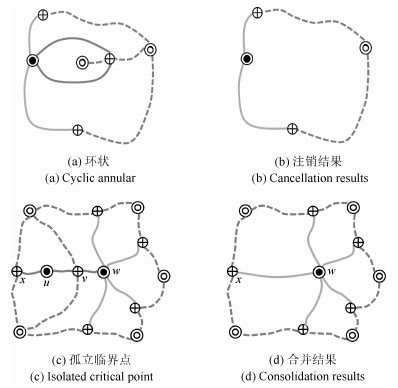
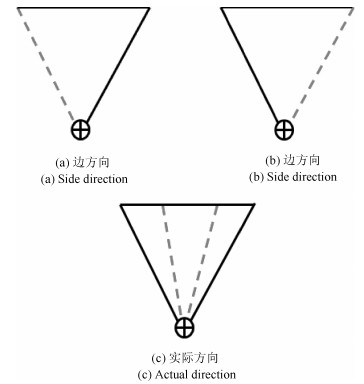
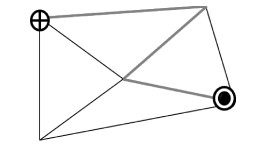
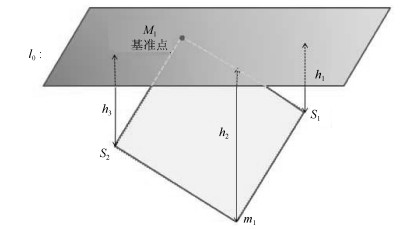
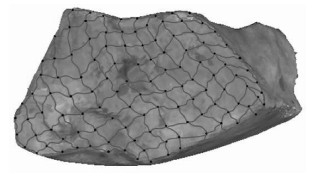
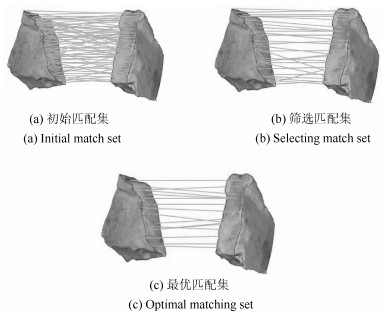
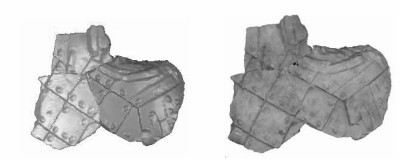
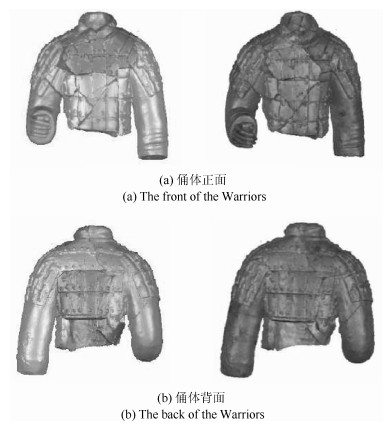
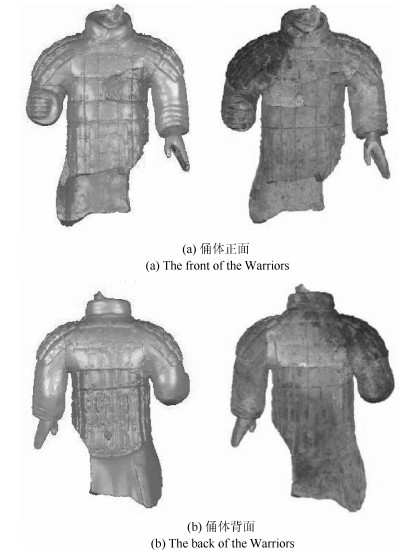
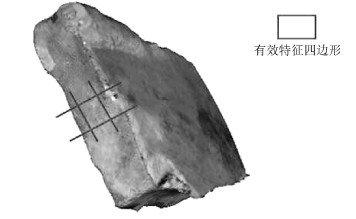
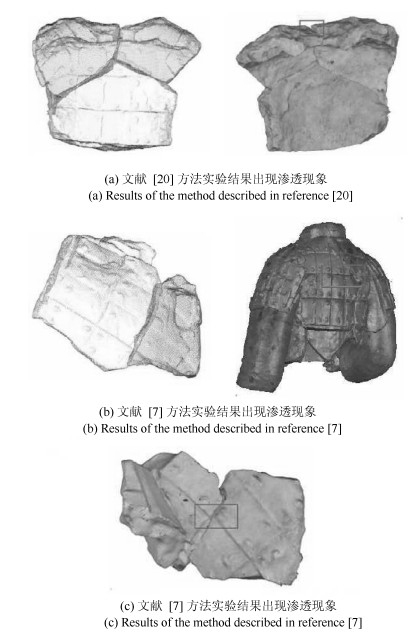
针对计算机辅助文物虚拟复原中由于破损文物断裂部位边缘受损而引起的轮廓线不能充分表示断裂面几何特征的问题,提出了一种基于断裂面拓扑特征的破碎文物自动拼接算法.首先,定义碎片模型顶点显著度指标函数,提取断裂面特征点,依据Morse-Smale复形理论构建并简化断裂面的几何拓扑图;然后,通过定义基准点与0值面,从而计算目标点的对应高度差值,将拓扑图中四边形曲面构造成为能完整表示断裂面几何特征的特征描述符,并根据凹凸互补性计算初始特征四边形匹配集的误差,筛选出最优匹配集;最后,采用四元组方法计算旋转、平移矩阵,利用穷举搜索法实现碎片的精确拼接.实验结果表明,该方法针对断裂部位边缘受损的破碎文物模型可获得较满意的拼接效果.
针对计算机辅助文物虚拟复原中由于破损文物断裂部位边缘受损而引起的轮廓线不能充分表示断裂面几何特征的问题,提出了一种基于断裂面拓扑特征的破碎文物自动拼接算法.首先,定义碎片模型顶点显著度指标函数,提取断裂面特征点,依据Morse-Smale复形理论构建并简化断裂面的几何拓扑图;然后,通过定义基准点与0值面,从而计算目标点的对应高度差值,将拓扑图中四边形曲面构造成为能完整表示断裂面几何特征的特征描述符,并根据凹凸互补性计算初始特征四边形匹配集的误差,筛选出最优匹配集;最后,采用四元组方法计算旋转、平移矩阵,利用穷举搜索法实现碎片的精确拼接.实验结果表明,该方法针对断裂部位边缘受损的破碎文物模型可获得较满意的拼接效果.




2018, 44(8): 1496-1504.
doi: 10.16383/j.aas.2018.c160766
cstr: 32138.14.j.aas.2018.c160766
摘要:
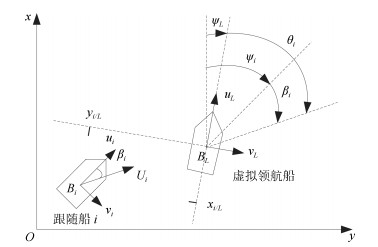
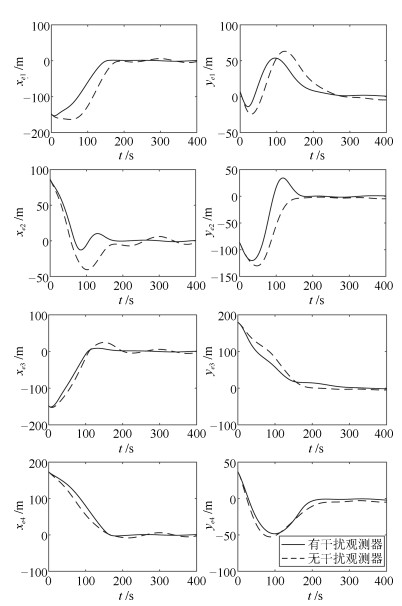
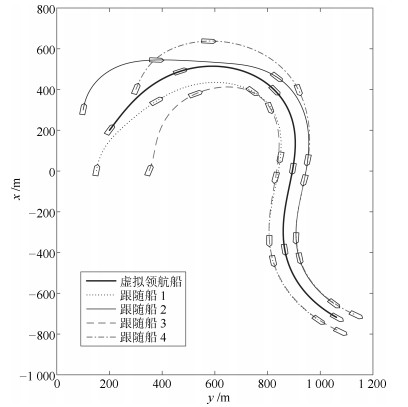
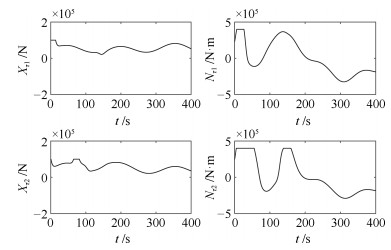
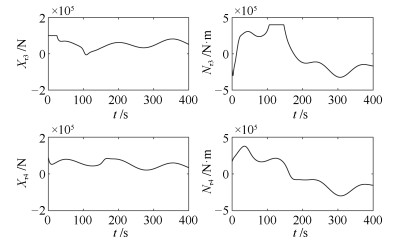
研究了具有输入饱和且存在横荡运动的欠驱动船舶在水面上运动的编队控制问题.使用Leader-follower方法,将编队控制问题转化为镇定控制问题.给出了不同于Backstepping方法的编队控制器设计三步法,该方法有助于克服输入饱和的影响,并分析了闭环系统的稳定性.进一步,将跟随船控制输入中的微分、虚拟领航船的加速度、跟随船动力学模型的不确定性和外扰统一视为干扰,应用干扰观测器估计并在控制器中给予补偿.仿真结果表明了方法的有效性.
研究了具有输入饱和且存在横荡运动的欠驱动船舶在水面上运动的编队控制问题.使用Leader-follower方法,将编队控制问题转化为镇定控制问题.给出了不同于Backstepping方法的编队控制器设计三步法,该方法有助于克服输入饱和的影响,并分析了闭环系统的稳定性.进一步,将跟随船控制输入中的微分、虚拟领航船的加速度、跟随船动力学模型的不确定性和外扰统一视为干扰,应用干扰观测器估计并在控制器中给予补偿.仿真结果表明了方法的有效性.


2018, 44(8): 1505-1517.
doi: 10.16383/j.aas.2018.c170563
cstr: 32138.14.j.aas.2018.c170563
摘要:
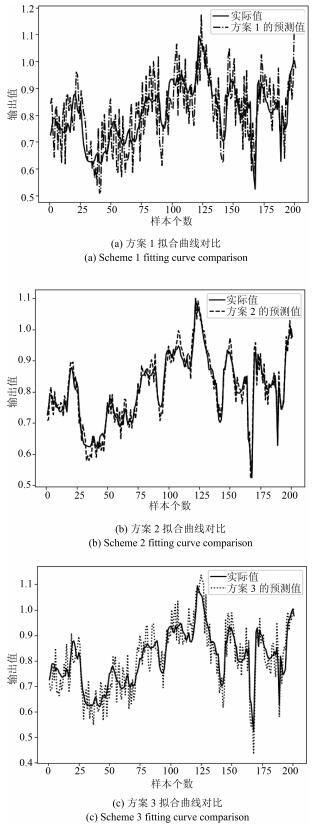
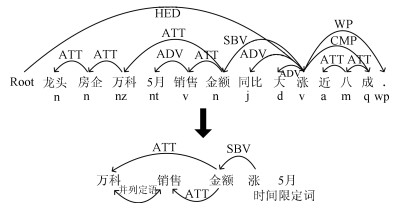
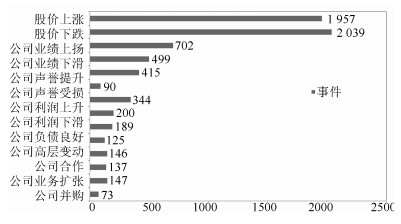
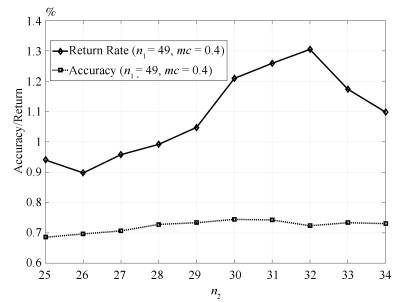
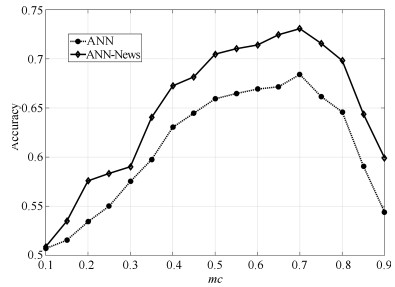
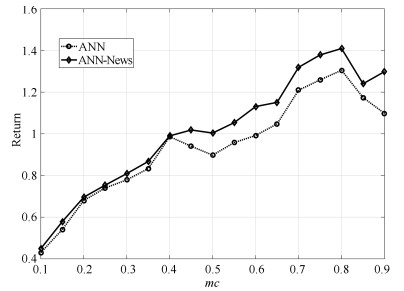
股票自动交易系统属于典型的复杂系统,其成功的关键是如何对股价进行有效的预测与决策.股价受多种信息的影响,但传统的自动交易模型多建立在历史交易数据的基础上.针对上述问题,本文综合利用新闻文本数据与股价技术指标数据,基于人工神经网络(Artificial neural netuorks,ANN)方法设计了一种多源数据驱动的股票自动交易决策模型.本文首先分析了各类财经新闻的特点及其对股价的影响,然后设计了相应模板抽取了中文文本中的财经新闻事件;在此基础上,设计了历史股价和新闻事件数据共同驱动的ANN-News模型,并利用实际数据验证了模型的有效性.实验发现,ANN-News模型比传统的机器学习类模型股价预测准确率提升约4%,收益率提升约7%.
股票自动交易系统属于典型的复杂系统,其成功的关键是如何对股价进行有效的预测与决策.股价受多种信息的影响,但传统的自动交易模型多建立在历史交易数据的基础上.针对上述问题,本文综合利用新闻文本数据与股价技术指标数据,基于人工神经网络(Artificial neural netuorks,ANN)方法设计了一种多源数据驱动的股票自动交易决策模型.本文首先分析了各类财经新闻的特点及其对股价的影响,然后设计了相应模板抽取了中文文本中的财经新闻事件;在此基础上,设计了历史股价和新闻事件数据共同驱动的ANN-News模型,并利用实际数据验证了模型的有效性.实验发现,ANN-News模型比传统的机器学习类模型股价预测准确率提升约4%,收益率提升约7%.



2018, 44(8): 1518-1527.
doi: 10.16383/j.aas.2017.c170188
cstr: 32138.14.j.aas.2017.c170188
摘要:
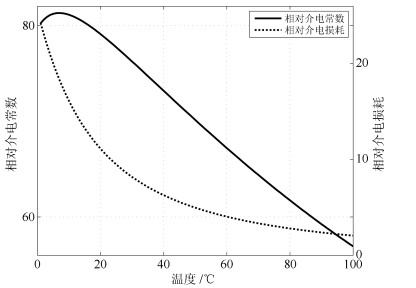
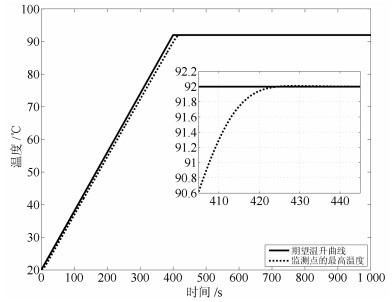
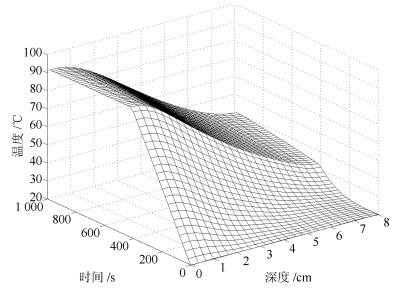
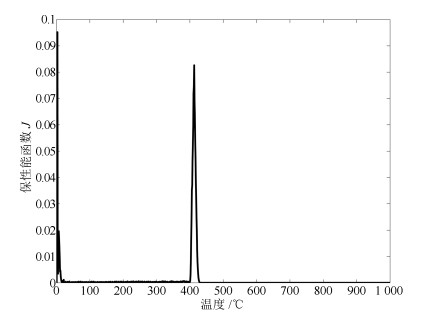
德拜媒质微波加热过程中,由于介电常数具有随温度变化的特性,导致电磁场的空间分布将会产生巨大的变化.若缺乏合理的功率调控策略,将导致燃烧、爆炸等一系列热失控现象.针对上述问题,本文提出一种滚动时域H∞保性能温度跟踪控制策略,以实现对监测位置的最高温度进行控制.基于微波加热德拜媒质的机理模型,同时考虑跟踪系统稳定性、动态性能和输入约束,以H∞增益和保性能函数作为性能指标,本文将温度跟踪问题转化为线性矩阵不等式(Linear matrix inequality,LMI)多目标优化问题,使得系统动态性能达到最优.最后以德拜媒质微波加热短波导模型为例,对所提出方法的有效性进行仿真验证.
德拜媒质微波加热过程中,由于介电常数具有随温度变化的特性,导致电磁场的空间分布将会产生巨大的变化.若缺乏合理的功率调控策略,将导致燃烧、爆炸等一系列热失控现象.针对上述问题,本文提出一种滚动时域H∞保性能温度跟踪控制策略,以实现对监测位置的最高温度进行控制.基于微波加热德拜媒质的机理模型,同时考虑跟踪系统稳定性、动态性能和输入约束,以H∞增益和保性能函数作为性能指标,本文将温度跟踪问题转化为线性矩阵不等式(Linear matrix inequality,LMI)多目标优化问题,使得系统动态性能达到最优.最后以德拜媒质微波加热短波导模型为例,对所提出方法的有效性进行仿真验证.


2018, 44(8): 1528-1536.
doi: 10.16383/j.aas.2017.c160852
cstr: 32138.14.j.aas.2017.c160852
摘要:
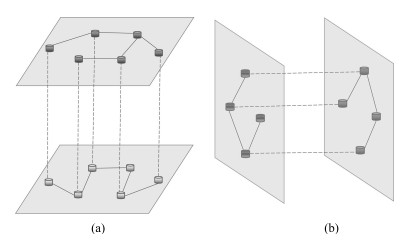
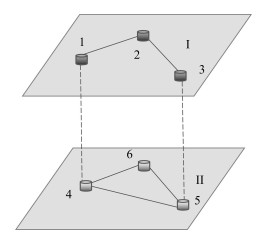
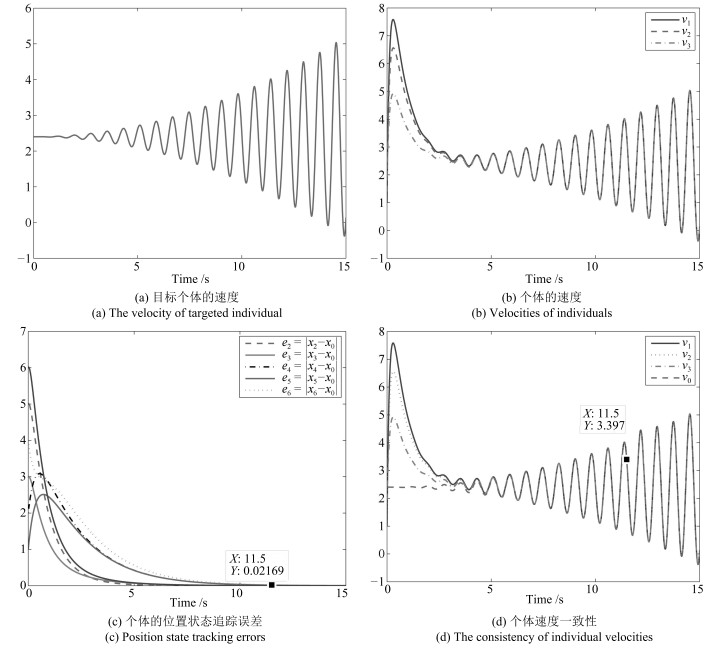
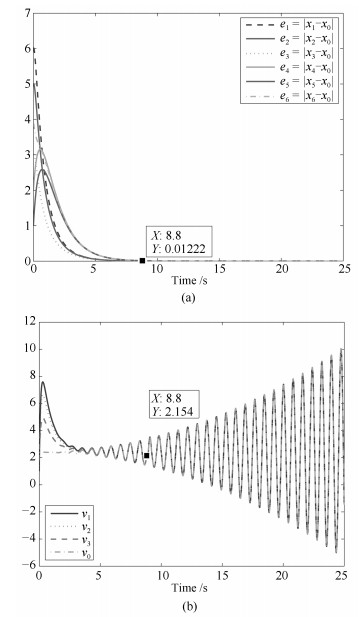
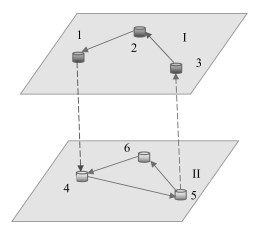
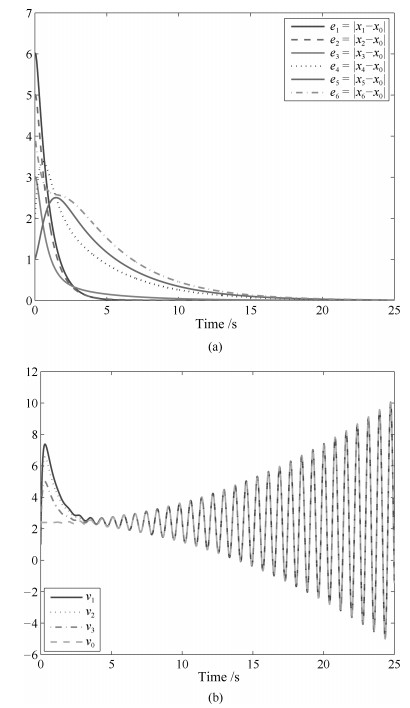
针对具有固定通信拓扑的异质相依群体系统的协同一致性追踪问题,从个体性质不同和子群体拓扑结构不同的角度出发,构建异质系统的相依模型.为了通过局部信息实现异质相依群体系统的一致性追踪,设计了一类分布式一致性追踪控制协议.随后,对于固定通信拓扑的情况,给出相应的充分条件确保一致性追踪的实现.定义了相依个体比例参数Pr并且分析了该参数对群体系统协同一致性追踪的影响.最后,通过仿真实例说明理论分析的有效性.
针对具有固定通信拓扑的异质相依群体系统的协同一致性追踪问题,从个体性质不同和子群体拓扑结构不同的角度出发,构建异质系统的相依模型.为了通过局部信息实现异质相依群体系统的一致性追踪,设计了一类分布式一致性追踪控制协议.随后,对于固定通信拓扑的情况,给出相应的充分条件确保一致性追踪的实现.定义了相依个体比例参数Pr并且分析了该参数对群体系统协同一致性追踪的影响.最后,通过仿真实例说明理论分析的有效性.