

Progress and Perspective of Recognition Methods for Walking Intention of Lower-limb Amputees
-
摘要: 直立行走是人类独立生活和正常参与社会活动的基本功能之一.人因遭受工伤、交通事故、战争、自然灾害(地震等)、疾病(糖尿病、癌症等)、先天出生缺陷等意外和不幸造成下肢截肢,从而部分或全部丧失行走能力,严重影响正常生活和参与社会活动.下肢假肢是下肢截肢者恢复行走功能的唯一手段,其技术发展吸引了众多研究者的关注.为使下肢假肢使用者能像正常腿一样或接近的步态行走,关键是实现截肢者行走意图的自动精确识别.本文首先探索了行走意图识别的内涵;然后从信号源的角度分析了不同截肢者行走意图识别方法的特点,尤其是神经功能重建作为补充的肌电信号(Electromyography,EMG)源的方法,并简述其研究进展,提出了一种融合生物力学信号和生物电信号的截肢者行走意图识别方法;最后对下肢截肢者行走意图识别方法发展趋势进行了总结和展望.
-
关键词:
- 下肢假肢 /
- 行走意图识别 /
- 肌电信号 /
- 生物力学信号 /
- 目标肌肉神经分布重建
Abstract: Walking is one of the basic functions of human beings to independently live and normally participate in social activities, thus recovery of walking function after lower-limb amputation would be significantly meaningful. Lower-limb prosthesis is a way to recover the walking ability, and it is the major substitution for the lost lower limb. Recently, the development of locomotion intention recognition for lower limb amputees has aroused the interest of many researchers. To achieve the goal of natural walking for amputees with lower limb prosthesis, the key point is to accurately and automatically identify their walking intentions. In this paper, we firstly describe the connotation and extension of locomotion intension. Then, we analyze the processes of different methods for locomotion intension recognition with several signal sources, especially hybrid reinnervation of targeted nerves and muscles as additional electromyography signal source. Finally, the methods with fusion signals by bio-mechanical signals and bioelectricity signals are proposed for walking intention recognition. In addition, challenges and future directions of locomotion intention recognition methods are also discussed.1) 本文责任编委 魏庆来 -

图 1 基于不同信息源的下肢截肢者行走意图识别
Fig. 1 Lower-limb locomotion intent recognition based on several signal sources
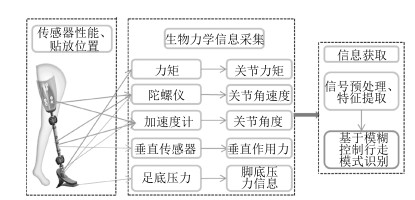
图 2 基于生物力学信息的截肢者行走意图识别原理示意图
Fig. 2 Lower-limb locomotion intent recognition based on biomechanical signals
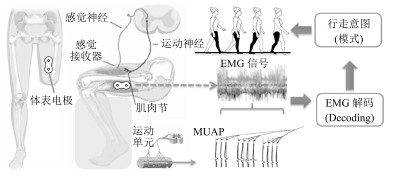
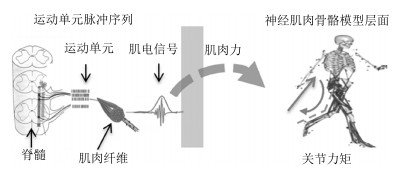
图 3 基于肌电信息识别截肢者行走意图原理示意图
Fig. 3 Lower-limb locomotion intent recognition based on sEMG signals
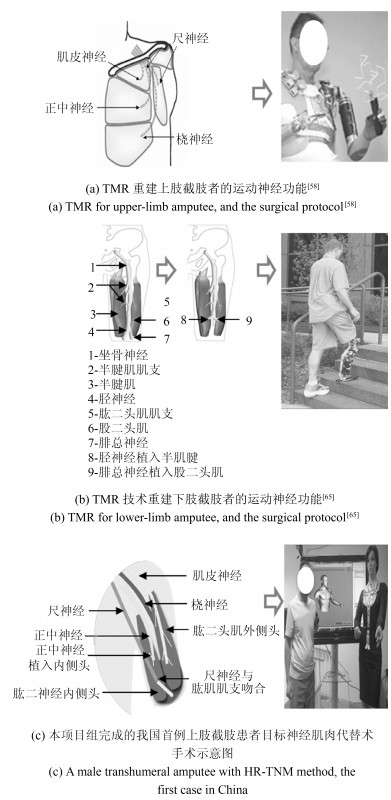
图 5 利用TMR技术重建截肢者的运动神经功能
Fig. 5 The neurological redirection to innervate accessory muscles by TMR
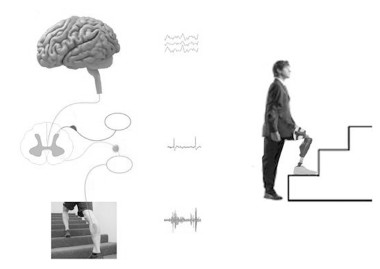
图 6 基于神经机器接口的截肢者行走意图识别示意图
Fig. 6 Lower-limb locomotion intent recognition based on different neural-machine interfaces
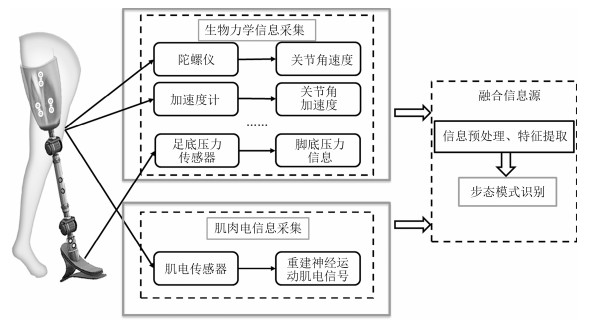
图 7 基于生物力学信息和肌电信息的多信息源融合的截肢者行走意图识别原理
Fig. 7 Lower-limb locomotion intent recognition based on biomechanical signals and sEMG signals
表 1 人体下肢行走意图识别的内涵
Table 1 The connotation and extension of locomotion intension of lower-limb human body
行走意图分类(功能) 行走模式(核心) 相位周期(基础) 步态事件(前提) 下肢具体动作 步行
上、下楼梯
上、下斜坡站立弯曲相
站立伸展相
摆动弯曲相
摆动伸展相脚跟触地(HS)
全足着地(FF)
足跟离地(HF)
脚尖离地(TO)
脚尖触地(TS) 下载: 导出CSV
下载: 导出CSV
表 2 利用不同信息源进行行走意图识别的性能比较
Table 2 A comparison with several methods based on different signal sources
信号分类 生物力学信号 肌电信号 运动单元动作电位序列 目标肌肉神经分布重建混合接口 脑电信号 优点 主要信号来源; 行走模式识别准确率高; 无创伤, 安全使用方便 较直接的信号来源; 可以检测肌肉力的变化; sEMG行走模式切换自然; 无创伤, 安全, 使用方便 最直接的信号来源; 更加准确地估计肌肉力, 动作类型识别精确, 无创伤, 安全 提供附加神经信息, 丰富信号来源; 无创伤, 安全, 使用方便 获取更多的假肢控制信息 缺点 无法检测神经肌肉状态 PNS植入式电极有创、在体内易纤维化造成测量失效; EMG信号源依赖患者截肢程度; sEMG具有时变特性, 易受环境干扰 记录的数据复杂而庞大, 计算困难 手术方案设计复杂, 对临床经验的要求高 可检测的神经信号微弱 应用场景 产品化 处于临床阶段 实验室分析 临床 实验室分析
下载: 导出CSV
-
[1] 侯增广, 赵新刚, 程龙, 王启宁, 王卫群.康复机器人与智能辅助系统的研究进展.自动化学报, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtmlHou Zeng-Guang, Zhao Xin-Gang, Cheng Long, Wang Qi-Ning, Wang Wei-Qun. Recent advances in rehabilitation robots and intelligent assistance systems. Acta Automatica Sinica, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtml [2] 第二次全国残疾人抽样调查领导小组, 中华人民共和国国家统计局. 2006年第二次全国残疾人抽样调查主要数据公报.中国康复理论与实践, 2006, 12(12):1013 doi: 10.3969/j.issn.1006-9771.2006.12.001Leading Group of the Second China National Sample Survey on Disability, National Bureau of Statistics of the People's Republic of China. 2006 communiqueon major statistics of the second China national sample survey on disability. Chinese Journal of Rehabilitation Theory and Practice, 2006, 12(12):1013 doi: 10.3969/j.issn.1006-9771.2006.12.001 [3] Chen B J, Wang Q N. Design and evaluation of a vibrotactile feedback system to improve volitional myoelectric control for robotic transtibial prostheses: a preliminary study. In: Proceedings of the 6th IEEE International Conference on Biomedical Robotics and Biomechatronics. Singapore, Singapore: IEEE, 2016. 1049-1054 [4] Li X X, Samuel O W, Zhang X, Wang H, Fang P, Li G L. A motion-classification strategy based on sEMG-EEG signal combination for upper-limb amputees. Journal of Neuroengineering and Rehabilitation, 2017, 14:Article No. 2 doi: 10.1186/s12984-016-0212-z [5] 王文俊. 基于映射模型的假肢膝关节控制方法研究[硕士学位论文]. 苏州大学, 中国, 2013Wang Wen-Jun. Prosthetic knee joint control method research based on the echo model[Master thesis], Soochow University, China, 2013 [6] 王振平, 喻洪流, 杜妍辰, 曹武警, 胡杰.假肢智能膝关节的研究现状和发展趋势.生物医学工程学进展, 2015, (3):159-163 doi: 10.3969/j.issn.1674-1242.2015.03.008Wang Zhen-Ping, Yu Hong-Liu, Du Yan-Chen, Cao Wu-Jing, Hu Jie. Research status and development trend of intelligent prosthetic knee. Progress in Biomedical Engineering, 2015, (3):159-163 doi: 10.3969/j.issn.1674-1242.2015.03.008 [7] 丁其川, 熊安斌, 赵新刚, 韩建达.基于表面肌电的运动意图识别方法研究及应用综述.自动化学报, 2016, 42(1):13-25 http://www.aas.net.cn/CN/abstract/abstract18792.shtmlDing Qi-Chuan, Xiong An-Bin, Zhao Xin-Gang, Han Jian-Da. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 2016, 42(1):13-25 http://www.aas.net.cn/CN/abstract/abstract18792.shtml [8] Hong K S, Khan M J. Hybrid brain-computer interface techniques for improved classification accuracy and increased number of commands:a review. Frontiers in Neurorobotics, 2017, 11:Article No. 35 doi: 10.3389/fnbot.2017.00035 [9] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [10] Huang H, Zhang F, Hargrove L J, Zhi D, Rogers D R, Englehart K B. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion. IEEE Transactions on Biomedical Engineering, 2011, 58(10):2867-2875 doi: 10.1109/TBME.2011.2161671 [11] Young A J, Hargrove L J. A classification method for user-independent intent recognition for transfemoral amputees using powered lower limb prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(2):217-225 doi: 10.1109/TNSRE.2015.2412461 [12] Li X, Shin H, Zong Y, Li S, Zhou P. Assessing muscle compliance in stroke with the myotonometer. Clinical Biomechanics, 2017, 50:110-113 http://linkinghub.elsevier.com/retrieve/pii/S0268003317302668 [13] 王启宁, 郑恩昊, 陈保君, 麦金耿.面向人机融合的智能动力下肢假肢研究现状与挑战.自动化学报, 2016, 42(12):1780-1793 http://www.aas.net.cn/CN/abstract/abstract18967.shtmlWang Qi-Ning, Zheng En-Hao, Chen Bao-Jun, Mai Jin-Geng. Recent progress and challenges of robotic lower-limb prostheses for human-robot integration. Acta Automatica Sinica, 2016, 42(12):1780-1793 http://www.aas.net.cn/CN/abstract/abstract18967.shtml [14] Hargrove L J, Simon A M, Lipschutz R, Finucane S B, Kuiken T A. Non-weight-bearing neural control of a powered transfemoral prosthesis. Journal of Neuroengineering and Rehabilitation, 2013, 10:Article No. 62 doi: 10.1186/1743-0003-10-62 [15] 郭欣, 王蕾, 宣伯凯, 李彩萍.基于有监督Kohonen神经网络的步态识别.自动化学报, 2017, 43(3):430-438 http://www.aas.net.cn/CN/abstract/abstract19021.shtmlGuo Xin, Wang Lei, Xuan Bo-Kai, Li Cai-Ping. Gait recognition based on supervised Kohonen neural network. Acta Automatica Sinica, 2017, 43(3):430-438 http://www.aas.net.cn/CN/abstract/abstract19021.shtml [16] Huang H, Kuiken T A, Lipschutz R D. A strategy for identifying locomotion modes using surface electromyography. IEEE Transactions on Biomedical Engineering, 2009, 56(1):65-73 doi: 10.1109/TBME.2008.2003293 [17] Cheron G, Leurs F, Bengoetxea A, Draye J P, Destrée M, Dan B. A dynamic recurrent neural network for multiple muscles electromyographic mapping to elevation angles of the lower limb in human locomotion. Journal of Neuroscience Methods, 2003, 129(2):95-104 doi: 10.1016/S0165-0270(03)00167-5 [18] Au S, Berniker M, Herr H. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Networks, 2008, 12(4):654-666 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ028382100 [19] Pieringer D S, Grimmer M, Russold M F, Riener R. Review of the actuators of active knee prostheses and their target design outputs for activities of daily living. In: Proceedings of the 2017 IEEE International Conference on Rehabilitation Robotics. London, UK: IEEE, 2017. 1246-1253 [20] Pons J L. Wearable Robots:Biomechatronic Exoskeletons. New York:Wiley, 2008. [21] Lura D J, Wernke M M, Carey S L, Kahle J T, Miro R M, Highsmith M J. Differences in knee flexion between the Genium and C-Leg microprocessor knees while walking on level ground and ramps. Clinical Biomechanics, 2015, 30(2):175-181 doi: 10.1016/j.clinbiomech.2014.12.003 [22] Meier M R, Hansen A H, Gard S A, McFadyen A K. Obstacle course:users' maneuverability and movement efficiency when using Otto Bock C-Leg, Otto Bock 3R60, and CaTech SNS prosthetic knee joints. Journal of Rehabilitation Research and Development, 2012, 49(4):583-596 doi: 10.1682/JRRD.2010.05.0094 [23] Martinez-Villalpando E C, Mooney L, Elliott G, Herr H. Antagonistic active knee prosthesis. A metabolic cost of walking comparison with a variable-damping prosthetic knee. In: Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Boston, MA, USA: IEEE, 2011. 8519-8522 [24] 王人成, 金德闻.仿生智能假肢的研究与进展.中国医疗器械信息, 2009, 15(1):3-5 doi: 10.3969/j.issn.1006-6586.2009.01.002Wang Ren-Cheng, Jin De-Wen. Research and development of bionic and intelligent limb prosthesis. China Medical Devices Information, 2009, 15(1):3-5 doi: 10.3969/j.issn.1006-6586.2009.01.002 [25] 黄岩, 谢广明, 杨晓华, 王启宁, 王龙.半被动双足机器人动态行走的位姿估算.北京大学学报(自然科学版), 2009, 45(4):565-571 doi: 10.3321/j.issn:0479-8023.2009.04.002Huang Yan, Xie Guang-Ming, Yang Xiao-Hua, Wang Qi-Ning, Wang Long. Body state estimation in a quasi-passive bipedal robot during dynamic walking. Acta Scientiarum Naturalium Universitatis Pekinensis, 2009, 45(4):565-571 doi: 10.3321/j.issn:0479-8023.2009.04.002 [26] Wen Y, Liu M, Si J, Huang H H. Adaptive control of powered transfemoral prostheses based on adaptive dynamic programming. In: Proceedings of the 38th IEEE Annual International Conference of the Engineering in Medicine and Biology Society. Orlando, FL, USA: IEEE, 2016. 1613-1624 [27] Zheng E H, Chen B J, Wei K L, Wang Q N. Lower limb wearable capacitive sensing and its applications to recognizing human gaits. Sensors, 2013, 13(10):13334-13355 doi: 10.3390/s131013334 [28] Zheng E H, Wang L, Wei K L, Wang Q N. A noncontact capacitive sensing system for recognizing locomotion modes of transtibial amputees. IEEE Transactions on Biomedical Engineering, 2014, 61(12):2911-2920 doi: 10.1109/TBME.2014.2334316 [29] Varol H A, Sup F, Goldfarb M. Multiclass real-time intent recognition of a powered lower limb prosthesis. IEEE Transactions on Biomedical Engineering, 2010, 57(3):542-551 doi: 10.1109/TBME.2009.2034734 [30] Gazzoli M, Sardini E, Serpelloni M, Donzella G. Human knee prosthesis equipped with force sensors. In: Proceedings of the 2011 International Conference on Biomedical Electronics and Devices. Rome, Italy: Biodevices, 2011. 26-29 [31] Mizrahi J. The role of electromyograms in resolving musculoskeletal interactions in able-bodied and disabled human individuals. Advances in Applied Electromyography. Philippine: InTech, 2011. 99-103 [32] Schmalz T, Blumentritt S, Marx B. Biomechanical analysis of stair ambulation in lower limb amputees. Gait and Posture, 2007, 25(2):267-278 doi: 10.1016/j.gaitpost.2006.04.008 [33] Isakov E, Keren O, Benjuya N. Trans-tibial amputee gait:time-distance parameters and EMG activity. Prosthetics and Orthotics International, 2000, 24(3):216-220 doi: 10.1080/03093640008726550 [34] Yu H, Fan X, Zhao L, Guo X. A novel hand gesture recognition method based on 2-channel sEMG. Technology and Health Care:Official Journal of the European Society for Engineering and Medicine, 2018, 26(S1):205-214 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC0214917485 [35] Nurhazimah N, Azizi A R M, Shin-Ichiroh Y, Anom A S, Hairi Z, Amri M S. A review of classification techniques of EMG signals during isotonic and isometric contractions. Sensors, 2016, 16(8):Article No. 1304 doi: 10.3390/s16081304 [36] James A, James C, Thwaites T. The brain effects of cannabis in healthy adolescents and in adolescents with schizophrenia:a systematic review. Psychiatry Research:Neuroimaging, 2013, 214(3):181-189 doi: 10.1016/j.pscychresns.2013.07.012 [37] Farina D, Merletti R, Enoka R M. The extraction of neural strategies from the surface EMG:an update. Journal of Applied Physiology, 2014, 117(11):1215-1230 doi: 10.1152/japplphysiol.00162.2014 [38] Merletti R, Farina D. Advances in non-invasive electromyography. Recent Research Developments in Biomedical Engineering, 2005, 2:1-35 http://porto.polito.it/1395640/ [39] Muceli S, Jiang N, Farina D. Extracting signals robust to electrode number and shift for online simultaneous and proportional myoelectric control by factorization algorithms. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(3):623-633 doi: 10.1109/TNSRE.2013.2282898 [40] Au S K, Bonato P, Herr H. An EMG-position controlled system for an active ankle-foot prosthesis: an initial experimental study. In: Proceedings of the 9th International Conference on Rehabilitation Robotics. Chicago, IL, USA: IEEE, 2005. [41] Miller J D, Beazer M S, Hahn M E. Myoelectric walking mode classification for transtibial amputees. IEEE Transactions on Biomedical Engineering, 2013, 60(10):2745-2750 doi: 10.1109/TBME.2013.2264466 [42] Peng L, Hou Z G, Kasabov N, Hu J, Peng L, Wang W Q. sEMG-based torque estimation for robot-assisted lower limb rehabilitation. In: Proceedings of the 2005 International Joint Conference on Neural Networks. Killarney, Ireland: IEEE, 2015. [43] Lee S W, Wilson K M, Lock B A, Kamper D G. Subject-specific myoelectric pattern classification of functional hand movements for stroke survivors. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2011, 19(5):558-566 doi: 10.1109/TNSRE.2010.2079334 [44] Scheme E J, Englehart K B, Hudgins B S. Selective classification for improved robustness of myoelectric control under nonideal conditions. IEEE Transactions on Biomedical Engineering, 2011, 58(6):1698-1705 doi: 10.1109/TBME.2011.2113182 [45] Chu J U, Moon I, Lee Y J, Kim S K, Mun M S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Transactions on Mechatronics, 2007, 12(3):282-290 doi: 10.1109/TMECH.2007.897262 [46] De Luca C J, Chang S S, Roy S H, Kline J C, Nawab S H. Decomposition of surface EMG signals from cyclic dynamic contractions. Journal of Neurophysiology, 2015, 113(6):1941-1951 doi: 10.1152/jn.00555.2014 [47] Laine C M, Martinez-Valdes E, Falla D, Mayer F, Farina D. Motor neuron pools of synergistic thigh muscles share most of their synaptic input. Journal of Neuroscience, 2015, 35(35):12207-12216 doi: 10.1523/JNEUROSCI.0240-15.2015 [48] Holobar A, Minetto M A, Farina D. Accurate identification of motor unit discharge patterns from high-density surface EMG and validation with a novel signal-based performance metric. Journal of Neural Engineering, 2014, 11(11):Article No. 016008 http://iopscience.iop.org/1741-2552/11/1/016008 [49] Farina D, Vujaklija I, Sartori M, Kapelner T, Negro F, Jiang N, et al. Man/machine interface based on the discharge timings of spinal motor neurons after targeted muscle reinnervation. Nature Biomedical Engineering, 2017, 1:Article No. 0025 http://spiral.imperial.ac.uk/handle/10044/1/44392 [50] Farina D, Negro F, Muceli S, Enoka R M. Principles of motor unit physiology evolve with advances in technology. Physiology, 2016, 31(2):83-94 doi: 10.1152/physiol.00040.2015 [51] Holobar A, Zazula D. Multichannel blind source separation using convolution kernel compensation. IEEE Transactions on Signal Processing, 2007, 55(9):4487-4496 doi: 10.1109/TSP.2007.896108 [52] Holobar A, Minetto M A, Botter A, Negro F, Farina D. Experimental analysis of accuracy in the identification of motor unit spike trains from high-density surface EMG. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2010, 18(3):221-229 doi: 10.1109/TNSRE.2010.2041593 [53] Martinez-Valdes E, Laine C M, Falla D, Mayer F, Farina D. High-density surface electromyography provides reliable estimates of motor unit behavior. Clinical Neurophysiology, 2016, 127(6):2534-2541 doi: 10.1016/j.clinph.2015.10.065 [54] Martinez-Valdes E, Falla D, Negro F, Mayer F, Farina D. Differential motor unit changes after endurance or high-intensity interval training. Medicine and Science in Sports and Exercise, 2017, 49(6):1126-1136 doi: 10.1249/MSS.0000000000001209 [55] 熊安斌, 丁其川, 赵新刚, 韩建达, 刘光军.基于单通道sEMG分解的手部动作识别方法.机械工程学报, 2016, 52(7):6-13 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201607002Xiong An-Bin, Ding Qi-Chuan, Zhao Xin-Gang, Han Jian-Da, Liu Guang-Jun. Classification of hand gestures based on single-channel sEMG decomposition. Journal of Mechanical Engineering, 2016, 52(7):6-13 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201607002 [56] Farina D, Rehbaum H, Holobar A, Vujaklija I, Jiang N, Hofer C, et al. Noninvasive, accurate assessment of the behavior of representative populations of motor units in targeted reinnervated muscles. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(4):810-819 doi: 10.1109/TNSRE.2014.2306000 [57] Almuklass A M, Davis L, Hamilton L D, Vieira T M, Botter A, Enoka R M. Motor unit discharge characteristics and walking performance of individuals with multiple sclerosis. Journal of Neurophysiology, 2018, 119(4):1273-1282 doi: 10.1152/jn.00598.2017 [58] Kuiken T A, Li G L, Lock B A, Lipschutz R D, Miller L A, Stubblefield K A, et al. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. Journal of the American Medical Association, 2009, 301(6):619-628 doi: 10.1001/jama.2009.116 [59] Kuiken T. Consideration of nerve-muscle grafts to improve the control of artificial arms. Technology and Disability, 2003, 15(2):105-111 http://content.iospress.com/articles/technology-and-disability/tad00124 [60] Kuiken T A, Dumanian G A, Lipschutz R D, Miller L A, Stubblefield K A. The use of targeted muscle reinnervation for improved myoelectric prosthesis control in a bilateral shoulder disarticulation amputee. Prosthetics and Orthotics International, 2004, 28(3):245-253 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ021517939 [61] Hijjawi J B, Kuiken T A, Lipschutz R D, Miller L A, Stubblefield K A, Dumanian G A. Improved myoelectric prosthesis control accomplished using multiple nerve transfers. Plastic and Reconstructive Surgery, 2006, 118(7):1573-1578 doi: 10.1097/01.prs.0000242487.62487.fb [62] Kuiken T. Targeted reinnervation for improved prosthetic function. Physical Medicine and Rehabilitation Clinics of North America, 2006, 17(1):1-13 doi: 10.1016/j.pmr.2005.10.001 [63] Kuiken T A, Miller L A, Lipschutz R D, Lock B A, Stubblefield K, Marasco P D, et al. Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation:a case study. Lancet, 2007, 369(9559):371-380 doi: 10.1016/S0140-6736(07)60193-7 [64] O'Shaughnessy K D, Dumanian G A, Lipschutz R D, Miller L A, Stubblefield K, Kuiken T A. Targeted reinnervation to improve prosthesis control in transhumeral amputees. The Journal of Bone and Joint Surgery, 2008, 90(2):393-400 doi: 10.2106/JBJS.G.00268 [65] Hargrove L J, Simon A M, Yong A J, Lipschutz R D, Finucane S B, Smith D G, et al. Robotic leg control with EMG decoding in an amputee with nerve transfers. New England Journal of Medicine, 2013, 369(13):1237-1242 doi: 10.1056/NEJMoa1300126 [66] 黄剑平, 李文庆, 杨琳, 朱明星, 朱小弟, 李楚炎等.上肢经肱骨截肢神经功能重建研究.集成技术, 2016, 5(5):30-37 http://d.old.wanfangdata.com.cn/Periodical/jcjx201605003Huang Jian-Ping, Li Wen-Qing, Yang Lin, Zhu Ming-Xing, Zhu Xiao-Di, Li Chu-Yan, et al. A pilot study of nerve function reinnervation on a transhumeral amputee. Journal of Integration Technology, 2016, 5(5):30-37 http://d.old.wanfangdata.com.cn/Periodical/jcjx201605003 [67] 王行愚, 金晶, 张宇, 王蓓.脑控:基于脑——机接口的人机融合控制.自动化学报, 2013, 39(3):208-221 http://www.aas.net.cn/CN/abstract/abstract17800.shtmlWang Xing-Yu, Jin Jing, Zhang Yu, Wang Bei. Brain control:human-computer integration control based on brain-computer interface. Acta Automatica Sinica, 2013, 39(3):208-221 http://www.aas.net.cn/CN/abstract/abstract17800.shtml [68] Jiang N, Gizzi L, Mrachacz-Kersting N, Dremstrup K, Farina D. A brain-computer interface for single-trial detection of gait initiation from movement related cortical potentials. Clinical Neurophysiology, 2015, 126(1):154-159 doi: 10.1016/j.clinph.2014.05.003 [69] Xu R, Jiang N, Lin C, Mrachacz-Kersting N, Dremstrup K, Farina D. Enhanced low-latency detection of motor intention from EEG for closed-loop brain-computer interface applications. IEEE Transactions on Biomedical Engineering, 2014, 61(2):288-296 doi: 10.1109/TBME.2013.2294203 [70] Cheron G, Duvinage M, De Saedeleer C, Castermans T, Bengoetxea A, Petieau M, et al. From spinal central pattern generators to cortical network:integrated bci forwalking rehabilitation. Neural Plasticity, 2012, 1012:Article No. 375148 http://difusion.ulb.ac.be/vufind/Record/ULB-DIPOT:oai:dipot.ulb.ac.be:2013/183207/Details [71] Chapin J K, Moxon K A, Markowitz R S, Nicolelis M A L. Real-time control of a robot arm using simultaneously recorded neurons in the motor cortex. Nature Neuroscience, 1999, 2(7):664-670 doi: 10.1038/10223 [72] Hargrove L J, Young A J, Simon A M, Fey N P, Lipschutz R D, Finucane S B, et al. Intuitive control of a powered prosthetic leg during ambulation:a randomized clinical trial. Journal of the American Medical Association, 2015, 313(22):2244-2252 doi: 10.1001/jama.2015.4527 [73] Nicolas-Alonso L F, Gomez-Gil J. Brain computer interfaces, a review. Sensors (Basel), 2012, 12(2):1211-1279 doi: 10.3390/s120201211 [74] Zetterberg L H. A class of codes for polyphase signals on a bandlimited Gaussian channel. IEEE Transactions on Information Theory, 1965, 11(3):385-395 doi: 10.1109/TIT.1965.1053807 [75] Wieser M, Haefeli J, Bütler L, Jäncke L, Riener R, Koeneke S. Temporal and spatial patterns of cortical activation during assisted lower limb movement. Experimental Brain Research, 2010, 203(1):181-191 doi: 10.1007/s00221-010-2223-5 [76] Wagner J, Solis-Escalante T, Grieshofer P, Neuper C, Müller-Putz G, Scherer R. Level of participation in robotic-assisted treadmill walking modulates midline sensorimotor EEG rhythms in able-bodied subjects. NeuroImage, 2012, 63(3):1203-1211 doi: 10.1016/j.neuroimage.2012.08.019 [77] Meng J J, Yao L, Sheng X J, Zhang D G, Zhu X Y. Simultaneously optimizing spatial spectral features based on mutual information for EEG classification. IEEE Transactions on Biomedical Engineering, 2015, 62(1):227-240 doi: 10.1109/TBME.2014.2345458 [78] Yao L, Meng J J, Zhang D G, Sheng X J, Zhu X Y, Zhan W. Selective sensation based brain-computer interface via mechanical vibrotactile stimulation. PLoS One, 2013, 8(6):Article No. e64784 doi: 10.1371/journal.pone.0064784 [79] 杨福生.随机信号分析.北京:清华大学出版社, 1990.Yang Fu-Sheng. Random Signal Analysis. Beijing:Tsinghua University Press, 1990. [80] Folane N R, Autee R M. EEG based brain controlled wheelchair for physically challenged people. International Journal of Innovative Research in Computer and Communication Engineering, 2016, 4(1):134-137 [81] 孙广彬, 王宏, 陆志国, 王福旺, 史添玮, 王琳.仿人足底肌电特征的机器人行走规划.自动化学报, 2015, 41(5):874-884 http://www.aas.net.cn/CN/abstract/abstract18662.shtmlSun Guang-Bin, Wang Hong, Lu Zhi-Guo, Wang Fu-Wang, Shi Tian-Wei, Wang Lin. Humanoid walking planning based on EMG from human foot-bottom. Acta Automatica Sinica, 2015, 41(5):874-884 http://www.aas.net.cn/CN/abstract/abstract18662.shtml -

 下载:
下载:

计量
- 文章访问数: 3445
- HTML全文浏览量: 1127
- PDF下载量: 957
- 被引次数: 0
