

Guaranteed Cost Control of Networked Control Systems With Bounded Packet Loss Based on Quantization Dependent Lyapunov Function
-
摘要: 研究了一类具有有界丢包的网络控制系统(Networked control systems,NCSs)的保成本控制问题,提出了一种包含量化反馈的网络控制系统数学模型,该模型将系统的镇定问题转化为镇定一系列子系统的鲁棒控制问题.在对网络控制系统的分析中,区别于常用的二次型Lyapunov函数,本文采用了一种新的且能够降低保守性的量化依赖Lyapunov函数方法.基于本文的Lyapunov函数,得到了充分考虑丢包过程的保成本控制器的设计方法.仿真算例验证了所给出方法的有效性.
-
关键词:
- 网络控制系统 /
- 保成本控制 /
- 量化反馈 /
- Lyapunov函数
Abstract: This paper investigates modeling and guaranteed cost control of quantized feedback systems over networks with bounded packet loss. The model of the networked control systems, which appropriately incorporates quantized feedback, is established in terms of robust control which transforms the problem of stabilization of networked control systems with packet loss into the problem of robust stabilization of a class of subsystems. Unlike the quadratic Lyapunov function which is normally used in analyzing networked control systems, this paper presents a new approach that can significantly reduce conservativeness by taking the quantization dependent Lyapunov function. Based on the provided Lyapunov function, a guaranteed cost state feedback controller is derived, which explicitly considers the packet loss process. A numerical example illustrates the effectiveness of the proposed method. -
网络控制系统(Networked control systems, NCSs)是一种空间分布式系统, 其控制回路中的传感器、控制器、执行器由有限带宽的通信网络相连接[1-3].与传统的控制系统相比, NCSs具有可靠性高、易于维护和扩展、能实现信息资源共享以及远程控制等优点[4-6].但网络特有的属性例如数据丢包、网络时滞等问题也给控制系统带来了不可忽视的负面影响.其中数据丢包是造成系统性能恶化甚至破坏系统稳定性的主要因素.很多学者研究了具有丢包的NCS的稳定性分析和控制器设计问题并得到了很有意义的结论[7-12], 其中文献[7]运用随机丢包模型研究了NCS的$H_\infty$控制问题.文献[8]研究了具有马尔科夫丢包的量化系统的预测控制综合问题.文献[9]研究了具有丢包和多包传输的NCS的稳定性问题.文献[10]研究了有界丢包网络环境下的多包不确定系统的鲁棒预测控制问题.然而文献[7-10]仅考虑了丢包存在于传感器与控制器之间即单边丢包的情况, 由于丢包往往同时存在于传感器与控制器、控制器与执行器之间, 即双边丢包, 因此文献[7-10]的结果有一定局限性.文献[11]考虑任意有界丢包过程, 解决了具有输入约束和状态约束的模型预测控制综合问题.文献[12]考虑有界丢包和马尔科夫丢包两种情况, 分析了系统的状态反馈镇定问题.
近年来, 由于有限精度算法在数字计算机中的应用, 大量学者开始研究量化反馈控制问题[13-22].在众多研究成果中, 主要采用了静态量化[23-27]和动态量化[28-32]两种量化方法.由于后者能动态调整量化水平而增加吸引域, 因此在处理系统稳定性问题上更具有优势.然而, 由于缺乏统一的研究方法导致其在控制性能问题上仍具有局限性.文献[23]基于模态依赖的对数量化器, 提出了马尔科夫非线性系统的量化动态输出反馈控制器设计方法.文献[24]研究了单输入单输出线性时不变系统的量化反馈镇定问题, 证明了对数量化器对于二次型稳定系统的必要性.文献[25]综合研究了关于带有对数量化器的单输入单输出系统和多输入多输出系统的状态反馈和输出反馈镇定问题, 文中量化误差被处理为区间不确定性, 由此将量化反馈控制问题转化为鲁棒控制问题.在文献[25]的基础上, 文献[26]提出了量化依赖Lyapunov函数方法, 用以处理单输入和多输入量化反馈系统的镇定问题和$H_\infty$控制问题.
本文考虑双边丢包的情况, 给出了单输入和多输入两种情况下的量化反馈网络系统的保成本控制器设计方法.在分别分析双边丢包过程的基础上, 建立了带有对数量化器的NCS数学模型, 进而将具有丢包和量化的NCS的镇定问题转化为镇定一系列系统的鲁棒控制问题.基于线性矩阵不等式(Linear matrix inequality, LMI)技术, 得到了保成本控制器的设计方法.本文最典型的特点是运用量化依赖Lyapunov函数得到了相较于文献[25]中二次型Lyapunov函数方法保守性更弱的结果.
注1. 本文中, $I$表示相应维数的单位阵, ${\bf R}^{n}$表示$n$维欧氏空间(${\bf R}$即${\bf R}^{1}$).对于向量${\pmb x}$, ${\pmb u}$和矩阵$\mathscr{W}$, $\mathscr{R}$, 有$\|{\pmb x}\|^2_{\mathscr{W}}:={\pmb x}^{\rm T}{\mathscr{W}}{\pmb x}$, $\|{\pmb u}\|^2_{\mathscr{R}}:={\pmb u}^{\rm T}{\mathscr{R}}{\pmb u}$.在对称矩阵中, 用星号$*$表示对称部分.
1. 问题阐述
假设被控对象为如下线性离散时不变系统:
$ {\pmb x}(k+1)=A{\pmb x}(k)+Bu(k) $
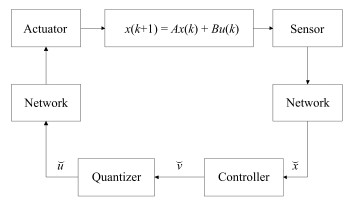
(1) 其中, ${\pmb x}(k)\in{\bf R}^{n}$和$u(k)\in{\bf R}$分别表示可测系统状态和系统输入. NCS如图 1所示.考虑量化状态反馈为
$ \breve{u}(k)=f(\breve{v}(k)) $
(2) $ \breve{v}(k)=K \breve{\pmb x}(k) $
(3) 其中, $\breve{u}(k) $, $\breve{v}(k) $, $ {\breve{\pmb x}}(k) $分别表示量化器输出、量化器输入、控制器输入, $K$表示状态反馈增益.定义静态时不变对数量化器为[24-25]
$ \begin{align} f(\breve{v})= \begin{cases} \upsilon_i,&\mbox{若}~ \it \dfrac{\rm 1}{\rm 1+ \delta}\upsilon_i <\breve{v}\leq \dfrac{\rm1}{\rm1-\delta}\upsilon_i, \\ &\quad\, \breve{v}>\rm0\\ 0, &\mbox{若}~\it \breve{v}=\rm0\\ -f(-\breve{v}), &\mbox{若}~ \it \breve{v}<\rm0 \end{cases} \end{align} $
(4) 由上式可知, 量化器对称, 即$f(-\breve{v})=-f(\breve{v}) $.
量化水平集为
$ \begin{align} &\mathscr{V}=\{\pm \upsilon_{i}:\upsilon_{i}=\rho^{i}\upsilon_0, i=0, \pm1, \pm2, \cdots\}\cup \{0\}, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\quad 0<\rho<1, ~~\upsilon_0>0 \end{align} $
(5) 其中, $\rho$表示量化器密度. $\delta={(1-\rho)}/{(1+\rho)}$.假设$\rho$已知, 则$\delta$已知, 并且满足$0<\delta<1$.定义量化误差为
$ \begin{align} e(k)=&\ \breve{u}(k)-\breve{v}(k)=\nonumber\\ &\ f(K{ {\breve{\pmb x}}}(k))-K{ {\breve{\pmb x}}}(k)=\Delta(k)K{ {\breve{\pmb x}}}(k) \end{align} $
(6) 其中, $\Delta(k)\in[-\delta, \delta]$.
定义1[4].令 $\mathscr{J}:=\{j_1, j_2, \cdots\}$ 表示从传感器到控制器成功传输数据的时间点序列, 令 $\mathscr{I}:=\{i_1, i_2, \cdots\}$ 表示从控制器到执行器成功传输数据的时间点序列, $\mathscr{J}$ , $\mathscr{I}$ 都是序列 $\{0, 1, 2, 3, \cdots\}$ 的子序列.令 $d_1:= {\rm max}_{j_l\in\mathscr{J}}(j_{l+1}-j_l)$ 为数据从传感器到控制器的丢包上界, $ d_2:= {\rm max}_{i_l\in\mathscr{I}}(i_{l+1}-i_l) $ 为数据从控制器到执行器的丢包上界.有界丢包过程定义为 $\{\eta(j_l):=j_{l+1}-j_l|{j_l}\in\mathscr{J}\}$ , $\{\zeta(i_l):= i_{l+1}-{i_l}|{i_l}$ $\in\mathscr{I}\}$ , 其中, $\eta(j_l) $ 和 $\zeta(i_l)$ 分别从 $\mathscr{D}_1:=\{1, 2, \cdots, d_1\}$ 和 $\mathscr{D}_2:=\{1, 2, \cdots, d_2\}$ 中任意取值.
只有部分成功传输的数据能影响闭环系统, 因此引入排序因子${\rm {ord}}\{\cdot\}$来定义这部分数据.对于任意整数序列, 排序因子在不增加或减少任何元素的情况下, 对原有整数序列按从小到大的顺序进行排序, 将得到的序列称为有序序列.令$\mathscr{S}={\rm {ord}}\{\mathscr{J}$, $\mathscr{I}\}$, 其中, 对于两个不相等的正整数$a$, $b$, 如果出现$i_a$ $= j_b$的情况, 则在$\mathscr{S}$中$j_b$位于$i_a$之前.因此有序序列$\sigma= \{\nu_1, \mu_1, \nu_2, \mu_2, \cdots\}\subseteq\mathscr{S}$存在且唯一, 使$\{\nu_1, \nu_2, \cdots\}\in\mathscr{J}$, $\{\mu_1, \mu_2, \cdots\}\in\mathscr{I}$, 有序序列$\sigma$为实际影响闭环系统的时间序列.
引理1[11].对于定义1中的丢包过程, 有$\mu_r -$ $\nu_r+1\in \mathscr{D}_2$, $\mu_{r+1}-\nu_r\in\mathscr{D}$, 其中, $\mathscr{D}:=\{1, 2, \cdots$, $d_1$$+d_2-1\}$.
文中控制器为$\breve{u}=f(\breve{v})=f(K {\breve{\pmb x}}) $.在每个$j_l$时刻, 无论控制器是否成功从传感器接收到数据, 认为$\breve{u}(j_l)=f(K {\breve{\pmb x}}(j_l))=f(K{\pmb x}(j_l)) $.对于所有满足条件$j_l\leq k<j_{l+1}$的$k$时刻, 执行器收到数据$\breve{u}(k)$ $=$ $\breve{u}(j_l) $.系统闭环模型为
$ \begin{align} &\mu_r-\nu_r+1=t:\nonumber\\ &\begin{cases} \!{\pmb x}(\mu_{r+1})=\tilde{A}^1{\pmb x}(\mu_r)+\tilde{B}_1{\pmb x}(\nu_r), &\mu_{r+1}-\mu_r=1\\ \!{\pmb x}(\mu_{r+1})=\tilde{A}^2{\pmb x}(\mu_r)+\tilde{B}_2{\pmb x}(\nu_r), &\mu_{r+1}-\mu_r=2\\ \!~~~~~~~~~~~~~~~~~~~~~~~\vdots &~~~~~~~~~~\vdots\\ \!{\pmb x}(\mu_{r+1})=\tilde{A}^l{\pmb x}(\mu_r)+\tilde{B}_l{\pmb x}(\nu_r), &\mu_{r+1}-\mu_r=l \end{cases}\nonumber \end{align} $
其中, $t\in \mathscr{D}_2$, $l\in \mathscr{D}(t)$, $\tilde{A}^l=A^l$, $\tilde{B}_l={B}_l(1+\Delta(\mu_r))K$.
上式可以等价为如下模型:
$ \begin{align} {\pmb x}(k+1)=&\ A^{k-\mu_r+1}{\pmb x}(\mu_r)\, +\nonumber\\ &\ B_{k-\mu_r+1}(1+\Delta(k))K{\pmb x}(\nu_r) \end{align} $
(7) 其中, $\mu_r\leq k<\mu_{r+1}$, $r\geq1$, $B_j=\sum_{s=0}^{j-1}A^sB$, $j$ $\geq$ $1$.
取如下扩展状态变量:
$ \begin{align*} &{\pmb z}(k)=\nonumber\\ &\ \, [{\pmb x}^{\rm T}(k)~ {\pmb x}^{\rm T}(k-1)~ {\pmb x}^{\rm T}(k-2)~ \cdots~ {\pmb x}^{\rm T}(k-d_2+1)]^{\rm T} \end{align*} $
则系统(7)可改写为如下的等价模型:
$ \begin{align} &{\pmb z}(\mu_{r+1})=\sum\limits_{t\in\mathscr{D}_2}\sum\limits_{l\in\mathscr{D}(t)}\lambda_{t} (\mu_r)\omega_l(\mu_r)\Phi_{lt}{\pmb z}(\mu_r) \end{align} $
(8) 其中, $\Phi_{lt}=[[\Psi_{lt}^{1}~~\Psi_{lt}^{2}~~ \cdots~~ \Psi_{lt}^{d_2}]^{\rm T}~~~[I ~0]^{\rm T}]^{\rm T}$, $\Phi_{lt}\in{\bf R}^{(d_2n)\times(d_2n)}$, $\Psi_{lt}^{s}\in{\bf R}^{\left(\min\{l, d_2\}n\right)\times n}$, $s\in\mathscr{D}_2 $.
如果$t=1$,
$ \begin{align*} & \Psi_{lt}^{s}=\\ &\ \ \begin{cases} [\tilde{A}_1^{\rm T}+\tilde{B}_1^{\rm T} ~~ \tilde{A}_2^{\rm T}+\tilde{B}_2^{\rm T} ~~ \cdots ~~ \tilde{A}_{x}^{\rm T}+\tilde{B}_{x}^{\rm T}]^{\rm T},&s=1\\ 0,&s\neq1 \end{cases} \end{align*} $
如果$t\neq1$,
$ \begin{align*} &\Psi_{lt}^{s}= \begin{cases} [\tilde{A}_1^{\rm T} ~~ \tilde{A}_2^{\rm T} ~~ \cdots ~~ \tilde{A}_{x}^{\rm T}]^{\rm T},&s=1\\ [\tilde{B}_1^{\rm T} ~~ \tilde{B}_2^{\rm T} ~~ \cdots ~~ \tilde{B}_{x}^{\rm T}]^{\rm T},&s=t\\ 0,&s\neq1, t \end{cases} \end{align*} $
其中, $x=\min\{l, d_2\}$, $\tilde{A}_\alpha=A^{l+1-\alpha}$, $\tilde{B}_\alpha=$ $B_{l+1-\alpha}(1+\Delta(k))K$, $\alpha\in\{1, 2, \cdots, \min\{l, d_2\}\}$.注意到如果有$\mu_r-\nu_r+1=t$, 那么$\lambda_{t}(\mu_r)=1$; 如果有$\mu_{r+1}-\mu_r=l$, 那么$\omega_{l}(\mu_r)=1$, 否则$\lambda_{t}(\mu_r)=$ $\omega_{l}(\mu_r)$ $=0$.
2. 主要结果
2.1 单输入情况
本文采用量化依赖Lyapunov函数方法设计保成本控制器及分析具有双边丢包量化反馈系统的稳定性.构造如下形式的Lyapunov函数:
$ V({\pmb x}(\mu_r))={\pmb x}^{\rm T}(\mu_r)P(\Delta(\mu_r)){\pmb x}(\mu_r) $
(9) 其中, $P(\Delta(\mu_r)) $时变且依赖于量化误差$\Delta(\mu_r) $, 有如下形式:
$ P(\Delta(\mu_r))=\frac{\delta-\Delta(\mu_r)}{2\delta}P_1+\frac{\delta+\Delta(\mu_r)}{2\delta}P_2\nonumber $
其中, $P_1$和$P_2$正定.保成本性能指标为
$ J=\sum\limits_{\tau=0}^{\infty}[\|{\pmb x}(\mu_{r+\tau})\|^2_{\mathscr{W}}+\|u(\mu_{r+\tau})\|^2_{\mathscr{R}}]\nonumber $
其中, $u(\mu_{r+\tau})=f(v(\mu_{r+\tau})) $, $v(\mu_{r+\tau})=K{\pmb x}(\mu_{r+\tau}) $, ${\pmb x}(\mu_{r+\tau})=\Theta_t{\pmb z}(\mu_{r+\tau}) $, $\Theta_t$不确定但可表示为$\Theta_t=[\Theta_t^{1}~~ \Theta_t^{2}~~ \cdots~~ \Theta_t^{d_2}]$, $\Theta_t^{s}\in{\bf R}^{n\times n}$, $s\in{\mathscr{D}_2}$, $\Theta_t^{s}=0$, $s$ $\neq$ ${t}$, $\Theta_t^{t}=I$.设计保证闭环系统渐近稳定的保成本控制器, 有如下定理:
定理1. 考虑如图 1中的离散时间系统及对数量化器(4), 如果存在矩阵$Q_1>0$, $Q_2>0$, $Y$, $G_{lt}$和$\gamma$满足如下LMIs:
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{1}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1-\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber \\ &\qquad\qquad\qquad\qquad\quad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\}\end{align} $
(10) $ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{2}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1+\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\} \end{align} $
(11) 那么, 存在保成本控制器(2)使闭环系统(8)渐近稳定, 且量化状态反馈控制器为
$ u(\nu_r)=(1+\Delta(\mu_r))YG^{-1}{\pmb x}(\mu_r) $
(12) 证明.闭环系统(8)渐近稳定, 如果有
$ \begin{align} &\Delta{V({\pmb z}(\mu_{r+\tau}))}=V({\pmb z}(\mu_{r+\tau+1}))-V({\pmb z}(\mu_{r+\tau}))=\nonumber\\ &\ \ \, {\pmb z}^{\rm T}(\mu_{r+\tau})\sum\limits_{t\in{\mathscr{D}_2}}\sum\limits_{l\in{\mathscr{D}(t)}}\lambda_t(\mu_{r+\tau})\omega_l(\mu_{r+\tau})\, \times\notag\\ &\ \ (\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P(\Delta(\mu_{r+\tau}))) {\pmb z}(\mu_{r+\tau})=\nonumber\\ &\ \ {\pmb z}^{\rm T}(\mu_{r+\tau})\Bigg(\sum\limits_{t\in{\mathscr{D}_2}}\sum\limits_{l\in{\mathscr{D}(t)}}\lambda_t(\mu_{r+\tau})\omega_l(\mu_{r+\tau})(\Phi^{\rm T}_{lt}\, \times\nonumber\\ &\ \ (\frac{\delta-\Delta(\mu_{r+\tau+1})}{2\delta}P_1+\frac{\delta+\Delta(\mu_{r+\tau+1})}{2\delta}P_2)\Phi_{lt}\, -\nonumber\\ &\ \ (\frac{\delta-\Delta(\mu_{r+\tau})}{2\delta}P_1\!+\!\frac{\delta+\Delta(\mu_{r+\tau})}{2\delta}P_2))\!\Bigg){\pmb z}(\mu_{r+\tau})<\nonumber \\ &\ \, -({\pmb x}^{\rm T}(\mu_{r+\tau})\mathscr{W}{\pmb x}(\mu_{r+\tau})\, +\nonumber\\ &\ \ u^{\rm T}(\mu_{r+\tau})\mathscr{R}u(\mu_{r+\tau}))<\notag\\ &\ \, -{\pmb z}^{\rm T}(\mu_{r+\tau})([I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\ \ (1+\Delta(\mu_{r+\tau}))^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta){\pmb z}(\mu_{r+\tau})<0 \end{align} $
(13) 由此得到如下不等式:
$ \begin{align} &{\pmb x}^{\rm T}(\mu_{r+\tau})\mathscr{W}{\pmb x}(\mu_{r+\tau})+u^{\rm T}(\mu_{r+\tau})\mathscr{R}u(\mu_{r+\tau})<\nonumber\\ &\qquad -\Delta{V({\pmb z}(\mu_{r+\tau}))} \end{align} $
(14) 将式(14)从$\tau=0$到$\tau=\infty$累加, 得到性能指标满足$J=\sum_{\tau=0}^{\infty}[\|{\pmb x}(\mu_{r+\tau})\|^2_{\mathscr{W}}+\|u(\mu_{r+\tau})\|^2_{\mathscr{R}}]\leq V(z(\mu_r)) $以及
$ \begin{align} &\Phi^{\rm T}_{lt}(\frac{\delta-\Delta(\mu_{r+\tau+1})}{2\delta}P_1+\frac{\delta+\Delta(\mu_{r+\tau+1})}{2\delta}P_2)\Phi_{lt}\, -\nonumber\\ &\qquad (\frac{\delta-\Delta(\mu_{r+\tau})}{2\delta}P_1+\frac{\delta+\Delta(\mu_{r+\tau})}{2\delta}P_2)\, +\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]+(1+\Delta(\mu_{r+\tau}))^2\, \times\nonumber\\ &\qquad \Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \quad t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} \end{align} $
(15) 考虑如下四种情形:
情形1. $\Delta(\mu_{r+\tau})=-\delta$, $\Delta(\mu_{r+\tau+1})=-\delta$;
情形2. $\Delta(\mu_{r+\tau})=-\delta$, $\Delta(\mu_{r+\tau+1})=\delta$;
情形3. $\Delta(\mu_{r+\tau})=\delta$, $\Delta(\mu_{r+\tau+1})=-\delta$;
情形4. $\Delta(\mu_{r+\tau})=\delta$, $\Delta(\mu_{r+\tau+1})=\delta$.
对于情形1和情形2, 由式(15), 得
$ \begin{align} &\Phi^{\rm T}_{lt}P_i\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1-\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in \{1, 2\} \end{align} $
(16) 对于情形3和情形4, 同样由式(15), 得
$ \begin{align} &\Phi^{\rm T}_{lt}P_i\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1+\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in \{1, 2\} \end{align} $
(17) 写出式(16)和式(17)包含的所有情况:
$ \Phi^{\rm T}_{lt}P_1\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1-\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \quad t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} $
(18) $ \Phi^{\rm T}_{lt}P_2\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1-\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \quad t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)} $
(19) $ \Phi^{\rm T}_{lt}P_1\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1+\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} $
(20) $ \Phi^{\rm T}_{lt}P_2\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W} [I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1+\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} $
(21) 对任意$\Delta(\mu_{r+\tau})\in [-\delta, \delta]$, $\Delta(\mu_{r+\tau+1})\in [-\delta$, $\delta]$, 将式(18)和式(19)分别乘以$(\delta$ $-$ $\Delta(\mu_{r+\tau+1}))/$ ${(2\delta)}$和${(\delta+\Delta(\mu_{r+\tau+1}))}/{(2\delta)}$, 然后将其结果相加, 得
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}\, \times\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]+(1-\delta)^2\Theta^{\rm T}K^{\rm T} \mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\ \ t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} \end{align} $
(22) 对式(20)和式(21)重复上述步骤, 得
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}\, \times\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]+(1+\delta)^2\Theta^{\rm T}K^{\rm T} \mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)} \end{align} $
(23) 将式(22)和式(23)分别乘以${(\delta-\Delta(\mu_{r+\tau}))}/$ ${(2\delta)}$和${(\delta+\Delta(\mu_{r+\tau}))}/{(2\delta)}$, 然后将其结果相加, 得
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P(\Delta(\mu_{r+\tau}))\, + \nonumber\\ &\qquad [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1+2\Delta(\mu_{r+\tau})+\delta^2)\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)} \end{align} $
(24) 注意到$(\Delta(\mu_{r+\tau}))^2<\delta^2$, 因此得到
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P(\Delta(\mu_{r+\tau}))\, +\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1+\Delta(\mu_{r+\tau}))^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\quad\ \ t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} \end{align} $
(25) 式(25)和式(13)等价.
令$K=YG^{-1}$, $Q_i=\gamma P_i^{-1}$, $i\in\{1, 2\}$, 以及
$ \begin{align} &G_{lt}= \left[\begin{array}{ccccc} G_{lt}^{11} &G_{lt}^{12} &\cdots &G_{lt}^{1, d_2} \\ G_{lt}^{21} &G_{lt}^{22} &\cdots &G_{lt}^{2, d_2} \\ \vdots &\vdots &\ddots &\vdots \\ G_{lt}^{d_2, 1} &G_{lt}^{d_2, 2} &\cdots &G_{lt}^{d_2, d_2} \end{array}\right], ~~ G_{lt}^{ts}=G\nonumber \\ &\qquad\qquad\qquad\qquad\qquad\qquad\quad t, s\in\mathscr{D}_2, ~ l\in{\mathscr{D}(t)}\nonumber \end{align} $
其中, 矩阵$G_{lt}$中的每一块子矩阵具有相同维数.在式(16)和式(17)两边分别乘以和$\gamma^{-1/2}G_{lt}$, 得
$ \begin{align} &G^{\rm T}_{lt}\Phi^{\rm T}_{lt}Q^{-1}_i\Phi_{lt}G_{lt}-\gamma^{-1}G^{\rm T}_{lt}P_1G_{lt}+\gamma^{-1}{G_{lt}^1}^{\rm T}\mathscr{W}G_{lt}^1+\nonumber\\ &\qquad \gamma^{-1}(1-\delta)^2[Y~Y~\cdots~Y]^{\rm T}\mathscr{R}[Y~Y~\cdots~Y]<0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\}\end{align} $
(26) $ \begin{align} &G^{\rm T}_{lt}\Phi^{\rm T}_{lt}Q^{-1}_i\Phi_{lt}G_{lt}-\gamma^{-1}G^{\rm T}_{lt}P_2G_{lt}+\gamma^{-1}{G_{lt}^1}^{\rm T}\mathscr{W}G_{lt}^1+\nonumber\\ &\qquad c\gamma^{-1}(1+\delta)^2[Y~Y~\cdots~Y]^{\rm T}\mathscr{R}[Y~Y~\cdots~Y]<0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\} \end{align} $
(27) 由$\gamma^{-1}G^{\rm T}_{lt}P_iG_{lt}\geq G^{\rm T}_{lt}+G_{lt}-Q_i$, $i\in\{1, 2\}$及Schur补引理, 上述两式可转化为如下LMIs:
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{1}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1-\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\}\nonumber\end{align} $
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{2}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1+\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)}, ~ i\in\{1, 2\}\nonumber \end{align} $
其中, .
2.2 多输入情况
以上考虑的是单输入的情形, 接下来将量化依赖Lyapunov函数方法拓展到多输入的情况.同样考虑线性离散时不变系统(1), 其中系统输入${\pmb u}(k)\in{\bf R}^m$, 量化反馈为
$ \begin{align} {\breve{\pmb u}}(k)=&\ f({\breve{\pmb v}}(k))=\nonumber\\ &\ [f_1(\breve{v}_1(k))~ f_2(\breve{v}_2(k))~ \cdots~ f_m(\breve{v}_m(k))~]^{\rm T} \end{align} $
(28) $ {\breve{\pmb v}}(k)=\ K{\breve{\pmb x}}(k) $
(29) 其中, $f_i(\cdot) $是量化器输入的第$i$行对应的量化器.同样假设为式(4)中的对数量化器, 则
$ {\breve{\pmb u}}(k)=(I+\Lambda(k))K{\breve{\pmb x}}(k) $
(30) $ \Lambda(k)={\rm diag}\{\Lambda_1(k), \Lambda_2(k), \cdots, \Lambda_m(k)\} $
(31) 其中, $\Lambda_i(k)\in[-\delta_i, \delta_i]$.可得系统闭环模型为
$ \begin{align} &{\pmb x}(k+1)=\nonumber\\ &\qquad A^{k-\mu_r+1}{\pmb x}(\mu_r)+B_{k-\mu_r+1}(I+\Lambda(k))K{\pmb x}(\nu_r) \end{align} $
(32) 通过研究发现, 式(31)中的$\Lambda(k) $可表示为
$ \begin{align} &\Lambda(k)=\sum\limits_{j=1}^{2^m}\lambda_j(k)\Lambda^{(j)}\nonumber\\ &\sum\limits_{j=1}^{2^m}\lambda_j(k)=1, ~~ \lambda_j(k)\geq0 \end{align} $
(33) 其中, $\Lambda^{(j)}$是对角矩阵, 只包含元素$-\delta_i$或$\delta_i$, $2^m$种$-\delta_i$或$\delta_i$的组合得到所有的$\Lambda^{(j)}$.因此系统闭环模型(32)可转化为
$ \begin{align} {\pmb x}(k+1)=&\ \sum\limits_{j=1}^{2^m}\lambda_j(k)(A^{k-\mu_r+1}{\pmb x}(\mu_r)+\nonumber\\ &\ B_{k-\mu_r+1}(I+\Lambda^{(j)})K{\pmb x}(\nu_r)) \end{align} $
(34) 针对多输入情况, 设计保成本控制器及分析具有双边丢包量化反馈系统的稳定性, 有如下定理:
定理2. 考虑如图 1中的离散时间系统及对数量化器$f_i(\cdot) $, 如果存在矩阵$Q_i>0$, $Q_j>0$, $Y$, $G_{lt}$和$\gamma$满足如下LMIs:
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{i}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{j}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(I+\Lambda^{(i)})[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)}, ~ (i, j)\in\varphi\times\varphi \end{align} $
(35) 其中, $\varphi=\{1, 2, \cdots, 2^m\}$.那么, 存在保成本控制器(28)使闭环系统(32)渐近稳定, 且量化状态反馈控制器为
$ \pmb {u}(\nu_r)=(I+\Lambda(\mu_r))YG^{-1}\pmb {x}(\mu_r) $
(36) 证明.构造形如式(9)的Lyapunov函数
$ \begin{align} &V({\pmb x}(\mu_r))={\pmb x}^{\rm T}(\mu_r)P(\Lambda(\mu_r)){\pmb x}(\mu_r)\nonumber\\ &P(\Lambda(\mu_r))=\sum\limits_{i=1}^{2^m}\lambda_i(\mu_r)P_i\nonumber \end{align} $
其中, 矩阵$P_i>0$, 重复定理1的证明过程, 可得
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{i}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{j}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(I+\Lambda^{(i)})[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~(i, j)\in\varphi\times\varphi\nonumber \end{align} $
由此, 对于任意$\Lambda(\mu_{r+\tau}) $和, 有
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Lambda(\mu_{r+\tau+1}))\Phi_{lt}-P(\Lambda(\mu_{r+\tau}))\, +\nonumber\\ &\ \ \ \ [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\ \ \ \ \Theta^{\rm T}K^{\rm T}(I+\Lambda(\mu_{r+\tau}))^{\rm T}\mathscr{R}(I+\Lambda(\mu_{r+\tau}))K\Theta<0\nonumber \end{align} $
即$V({\pmb z}(\mu_{(r+\tau+1)}))-V({\pmb z}(\mu_{(r+\tau)}))<0$.由此保证了闭环系统(32)渐近稳定.
注2. 本文所谓保守性更弱的结论主要是针对文献[25]采用的二次型Lyapunov函数$V(x)=$ ${\pmb x}^{\rm T}P{\pmb x}$而言, 即对整个量化误差区间$\Delta(k)\in[-\delta$, $\delta]$取固定的Lyapunov矩阵$P$.而本文采用了新的量化依赖Lyapunov函数, $V({\pmb x}(\mu_r))={\pmb x}^{\rm T}(\mu_r)$ $\times$ $P(\Delta(\mu_r)){\pmb x}(\mu_r) $, Lyapunov矩阵$P(\Delta(\mu_r)) $依赖于量化误差, 即$P(\Delta(\mu_r))=(\delta-\Delta(\mu_r))P_1/(2\delta)+(\delta$ $+$ $\Delta(\mu_r))P_2/(2\delta)$, 在定理1和定理2中, 若取$Q_1$ $=$ $Q_2=P$, 则本文的结论可退化为文献[25]的结论.由此可知, 本文的方法保守性更弱.
3. 仿真例子
为验证定理1, 考虑如下单输入线性离散时不变系统:
$ \begin{align} {\pmb x}(k+1)= \left[\begin{array}{ccc} 1 & 0.1\\ 0 & 0.99 \end{array}\right]{\pmb x}(k)+ \left[\begin{array}{ccc} 0 \\ 0.0787 \end{array}\right]u(k)\nonumber \end{align} $
初始状态为${\pmb x}(0)=[0.01~ 0]^{\rm T}$, 两个通道丢包上界为$d_1$ $=d_2=3$.
为验证定理2, 考虑如下多输入线性离散时不变系统:
$ \begin{align} {\pmb x}(k+1)= \left[\begin{array}{ccc} 1 & 0.1\\ 0 & 0.99 \end{array}\right]{\pmb x}(k)+ \left[\begin{array}{ccc} 1 & 0 \\ 1 & 1 \end{array}\right]{\pmb u}(k)\nonumber \end{align} $
同样, 取初始状态为${\pmb x}(0)=[0.01~ 0]^{\rm T}$, 两个通道丢包上界为$d_1=d_2=3$.
系统网络数据传输状态如图 2所示, 其中, $s2c$ $=$ $1$表示控制器从传感器成功接收到数据, $s2c=0$则没有收到数据, $c2a$ $=$ $1$表示执行器从控制器成功接收到数据, $c2a=0$则没有收到数据.基于定理1和定理2, 得到了在不同量化密度下的单输入系统及多输入系统的状态响应和控制输入仿真结果分别如图 3和图 4所示, 并且列出其反馈增益$K$和性能指标$J$值如表 1.由此证明了本文NCS保成本控制器设计方法的有效性.与文献[25]中二次型Lyapunov函数方法相比, 不论是单输入系统还是多输入系统, 采用本文的量化依赖Lyapunov函数方法, 可以较好地改善控制性能.此外, 从仿真实验结果来看, 当量化密度取得较小时, 即量化器较粗糙, 可以得到文献[25]中二次型Lyapunov方法不可行, 而本文方法可以正常求解的结论, 因此本文方法保守性更弱.
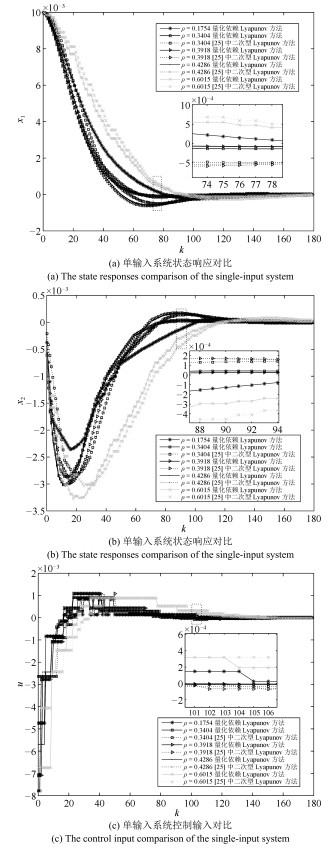 图 3 单输入系统状态响应及控制输入Fig. 3 The state responses and control input of the single-input system
图 3 单输入系统状态响应及控制输入Fig. 3 The state responses and control input of the single-input system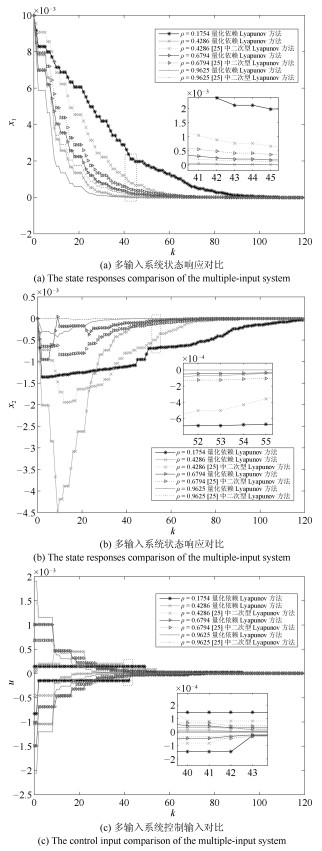 图 4 多输入系统状态响应及控制输入Fig. 4 The state responses and control input of the multiple-input system表 1 两种Lyapunov函数方法下的反馈增益$K$及性能指标$J$对比Table 1 Comparison of feedback gain $K$ and performance index $J$ values using two Lyapunov function methods
图 4 多输入系统状态响应及控制输入Fig. 4 The state responses and control input of the multiple-input system表 1 两种Lyapunov函数方法下的反馈增益$K$及性能指标$J$对比Table 1 Comparison of feedback gain $K$ and performance index $J$ values using two Lyapunov function methods系统 量化密度$\rho$值 方法 反馈增益$K$值 性能指标$J$值 单输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.5888 & -1.6344 {array}\right]$ $0.0022$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.3404$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.6563 & -1.5303{array}\right]$ $0.0020$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.4870 & -1.0089{array}\right]$ $0.0022$ $\rho=0.3918$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.6691 & -1.5135{array}\right]$ $0.0018$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.5079 & -1.0487{array}\right]$ $0.0020$ $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.6764 & -1.5042{array}\right]$ $0.0019$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.5214 & -1.0764{array}\right]$ $0.0020$ $\rho=0.6015$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.7054 & -1.4931{array}\right]$ $0.0034$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.5835 & -1.2062{array}\right]$ $0.0035$ 多输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.0642 & -0.0508\\ 0.0173 & -0.0746 {array}\right]$ $0.0016$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.1380 & -0.0674\\ 0.0035 & -0.1285{array}\right]$ $0.0007$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.0717 & -0.0274\\0.0122 & -0.1371{array}\right]$ $0.0012$ $\rho=0.6794$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.1286 & -0.0582\\ 0.1125 & -0.0763{array}\right]$ $0.0005$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.1085 & -0.0579\\0.0833 & -0.0777{array}\right]$ $0.0007$ $\rho=0.9625$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.2041 & -0.0577\\ 0.1914 & -0.1517{array}\right]$ $0.0003$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.1455 & -0.0601\\0.1445 & -0.0785{array}\right]$ $0.0004$ 4. 结论
本文的主要目标是给出丢包网络系统的保成本控制器设计方法, 该方法的关键在于运用量化依赖Lyapunov函数来分析闭环系统的稳定性.本文基于鲁棒控制理论建立了包含对数量化器的网络控制系统数学模型, 得到了系统鲁棒稳定的充分条件和保成本控制器.仿真结果证明了设计方法的有效性和合理性, 并通过和文献[25]中二次型Lyapunov函数方法的比较, 说明了运用量化依赖的Lyapunov函数方法得到的结果保守性更弱.但同时也由于该Lyapunov函数引入了更多的决策变量, 使得本文方法付出了更大计算量的代价.
-
图 3 单输入系统状态响应及控制输入
Fig. 3 The state responses and control input of the single-input system
图 4 多输入系统状态响应及控制输入
Fig. 4 The state responses and control input of the multiple-input system
表 1 两种Lyapunov函数方法下的反馈增益$K$及性能指标$J$对比
Table 1 Comparison of feedback gain $K$ and performance index $J$ values using two Lyapunov function methods
系统 量化密度$\rho$值 方法 反馈增益$K$值 性能指标$J$值 单输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.5888 & -1.6344 \end{array}\right]$ $0.0022$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.3404$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.6563 & -1.5303\end{array}\right]$ $0.0020$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.4870 & -1.0089\end{array}\right]$ $0.0022$ $\rho=0.3918$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.6691 & -1.5135\end{array}\right]$ $0.0018$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.5079 & -1.0487\end{array}\right]$ $0.0020$ $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.6764 & -1.5042\end{array}\right]$ $0.0019$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.5214 & -1.0764\end{array}\right]$ $0.0020$ $\rho=0.6015$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.7054 & -1.4931\end{array}\right]$ $0.0034$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.5835 & -1.2062\end{array}\right]$ $0.0035$ 多输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.0642 & -0.0508\\ 0.0173 & -0.0746 \end{array}\right]$ $0.0016$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.1380 & -0.0674\\ 0.0035 & -0.1285\end{array}\right]$ $0.0007$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.0717 & -0.0274\\0.0122 & -0.1371\end{array}\right]$ $0.0012$ $\rho=0.6794$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.1286 & -0.0582\\ 0.1125 & -0.0763\end{array}\right]$ $0.0005$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.1085 & -0.0579\\0.0833 & -0.0777\end{array}\right]$ $0.0007$ $\rho=0.9625$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.2041 & -0.0577\\ 0.1914 & -0.1517\end{array}\right]$ $0.0003$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.1455 & -0.0601\\0.1445 & -0.0785\end{array}\right]$ $0.0004$  下载: 导出CSV
下载: 导出CSV
-
[1] Hespanha J P, Naghshtabrizi P, Xu Y G. A survey of recent results in networked control systems. Proceedings of the IEEE, 2007, 95(1):138-162 doi: 10.1109/JPROC.2006.887288 [2] Walsh G C, Ye H, Bushnell L G. Stability analysis of networked control systems. IEEE Transactions on Control Systems Technology, 2002, 10(3):438-446 doi: 10.1109/87.998034 [3] 孙业国, 秦世引.有界丢包网络控制系统的稳定性与能稳性.自动化学报, 2011, 37(1):113-117 http://www.aas.net.cn/CN/abstract/abstract17413.shtmlSun Ye-Guo, Qin Shi-Yin. Stability and stabilization of networked control systems with bounded packet dropout. Acta Automatica Sinica, 2011, 37(1):113-117 http://www.aas.net.cn/CN/abstract/abstract17413.shtml [4] Tang X M, Ding B C. Model predictive control of linear systems over networks with data quantizations and packet losses. Automatica, 2013, 49(5):1333-1339 doi: 10.1016/j.automatica.2013.02.033 [5] 游科友, 谢立华.网络控制系统的最新研究综述.自动化学报, 2013, 39(2):101-118 http://www.aas.net.cn/CN/abstract/abstract17806.shtmlYou Ke-You, Xie Li-Hua. Survey of recent progress in networked control systems. Acta Automatica Sinica, 2013, 39(2):101-118 http://www.aas.net.cn/CN/abstract/abstract17806.shtml [6] Shi P, Zhang Y Q, Chadli M, Agarwal R K. Mixed H-infinity and passive filtering for discrete fuzzy neural networks with stochastic jumps and time delays. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(4):903-909 doi: 10.1109/TNNLS.2015.2425962 [7] Seiler P, Sengupta R. An H∞ approach to networked control. IEEE Transactions on Automatic Control, 2005, 50(3):356-364 doi: 10.1109/TAC.2005.844177 [8] Zou Y Y, Lam J, Niu Y G, Li D W. Constrained predictive control synthesis for quantized systems with Markovian data loss. Automatica, 2015, 55:217-225 doi: 10.1016/j.automatica.2015.03.016 [9] Zhang W, Branicky M S, Phillips S M. Stability of networked control systems. IEEE Control Systems Magazine, 2001, 21(1):84-99 doi: 10.1109/37.898794 [10] 魏善碧, 丁宝苍, 柴毅.有界丢包网络环境下不确定系统的预测控制.控制与决策, 2009, 24(9):1326-1330 doi: 10.3321/j.issn:1001-0920.2009.09.009Wei Shan-Bi, Ding Bao-Cang, Chai Yi. Predictive control of uncertain systems under networked environment with bounded packet loss. Control and Decision, 2009, 24(9):1326-1330 doi: 10.3321/j.issn:1001-0920.2009.09.009 [11] Ding B C. A synthesis approach of model predictive control for linear systems over networks with bounded packet loss. In: Proceedings of the 8th IEEE International Conference on Control and Automation (ICCA). Xiamen, China: IEEE, 2010. 2258-2263 [12] Xiong J L, Lam J. Stabilization of linear systems over networks with bounded packet loss. Automatica, 2007, 43(1):80-87 doi: 10.1016/j.automatica.2006.07.017 [13] Ishii H, Francis B A. Quadratic stabilization of sampled-data systems with quantization. Automatica, 2003, 39(10):1793-1800 doi: 10.1016/S0005-1098(03)00179-1 [14] Liberzon D. Hybrid feedback stabilization of systems with quantized signals. Automatica, 2003, 39(9):1543-1554 doi: 10.1016/S0005-1098(03)00151-1 [15] Liu J L, Elia N. Quantized feedback stabilization of non-linear affine systems. International Journal of Control, 2004, 77(3):239-249 doi: 10.1080/00207170310001655336 [16] Bicchi A, Marigo A, Piccoli B. On the reachability of quantized control systems. IEEE Transactions on Automatic Control, 2002, 47(4):546-563 doi: 10.1109/9.995034 [17] 王隔霞.一类非线性系统的量化控制器的设计.自动化学报, 2016, 42(1):140-144 http://www.aas.net.cn/CN/abstract/abstract18803.shtmlWang Ge-Xia. Design of quantizer for a class of nonlinear systems. Acta Automatica Sinica, 2016, 42(1):140-144 http://www.aas.net.cn/CN/abstract/abstract18803.shtml [18] Brockett R W, Liberzon D. Quantized feedback stabilization of linear systems. IEEE Transactions on Automatic Control, 2000, 45(7):1279-1289 doi: 10.1109/9.867021 [19] Fagnani F, Zampieri S. Stability analysis and synthesis for scalar linear systems with a quantized feedback. IEEE Transactions on Automatic Control, 2003, 48(9):1569-1584 doi: 10.1109/TAC.2003.816982 [20] Ji M M, Li Z J, Zhang W D. Quantized feedback stabilization of discrete-time linear system with Markovian jump packet losses. Neurocomputing, 2015, 158:307-314 doi: 10.1016/j.neucom.2014.08.058 [21] Zanma T, Azegami M, Liu K Z. Optimal input and quantization interval for quantized feedback system with variable quantizer. IEEE Transactions on Industrial Electronics, 2017, 64(3):2246-2254 doi: 10.1109/TIE.2016.2625240 [22] Wakaiki M, Yamamoto Y. Stabilisation of switched systems with sampled and quantised output feedback. IET Control Theory and Applications, 2017, 11(12):1913-1921 doi: 10.1049/iet-cta.2016.1299 [23] Li F B, Shi P, Wu L G, Basin M V, Lim C C. Quantized control design for cognitive radio networks modeled as nonlinear semi-markovian jump systems. IEEE Transactions on Industrial Electronics, 2015, 62(4):2330-2340 doi: 10.1109/TIE.2014.2351379 [24] Elia N, Mitter S K. Stabilization of linear systems with limited information. IEEE Transactions on Automatic Control, 2001, 46(9):1384-1400 doi: 10.1109/9.948466 [25] Fu M Y, Xie L H. The sector bound approach to quantized feedback control. IEEE Transactions on Automatic Control, 2005, 50(11):1698-1711 doi: 10.1109/TAC.2005.858689 [26] Gao H J, Chen T W. A new approach to quantized feedback control systems. Automatica, 2008, 44(2):534-542 doi: 10.1016/j.automatica.2007.06.015 [27] Wang F, Chen B, Lin C, Zhang J, Meng X Z. Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Transactions on Cybernetics, 2017, 48(6):1839-1848 http://dblp.uni-trier.de/db/journals/tcyb/tcyb48.html#WangCLZM18 [28] Tatikonda S, Mitter S. Control under communication constraints. IEEE Transactions on Automatic Control, 2004, 49(7):1056-1068 doi: 10.1109/TAC.2004.831187 [29] Che W W, Mei Z Y. Robustness guaranteed cost control for discrete-time systems with dynamic quantization. In: Proceedings of the 33rd Chinese Control Conference (CCC). Nanjing, China: IEEE, 2014. 5824-5829 [30] Duan K, Cai Y Z, Zhang W D. Stabilization of dynamic quantized system with faults. In: Proceedings of the 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015. 6541-6545 [31] Okajima H, Sawada K, Matsunaga N. Dynamic quantizer design under communication rate constraints. IEEE Transactions on Automatic Control, 2016, 61(10):3190-3196 doi: 10.1109/TAC.2015.2509438 [32] Takahashi R, Azuma S, Hikihara T. Power regulation with predictive dynamic quantizer in power packet dispatching system. IEEE Transactions on Industrial Electronics, 2016, 63(12):7653-7661 doi: 10.1109/TIE.2016.2591898 期刊类型引用(9)
1. 王后能,牛松梅,李自成. 含丢包和量化的网络控制系统随机鲁棒稳定. 控制工程. 2024(02): 288-294 .  百度学术
百度学术2. 周颖,郑颖,肖敏. DoS攻击下的网络控制系统基于量化的输出反馈控制. 应用数学学报. 2023(02): 230-246 . 百度学术3. 赵华荣,彭力,于洪年,沈奕宏. 考虑量化的多智能体系统数据驱动双向一致性控制. 控制理论与应用. 2022(02): 336-342 . 百度学术4. 刘毅,梅玉鹏,李国燕,潘玉恒,梅树立. 基于T-S模糊模型的多时滞非线性网络切换控制系统非脆弱H_∞控制. 控制与决策. 2021(05): 1087-1094 . 百度学术5. 刘毅,梅玉鹏,李国燕,潘玉恒. 网络环境下切换模糊时滞系统的非脆弱控制. 计算机工程. 2020(03): 299-308 . 百度学术6. 张英,司瑞才,曹伟. 网络化控制系统研究综述. 电力科技与环保. 2020(02): 60-62 . 百度学术7. 罗明,黄晓鹏. 汽车FlexRay车载网络控制系统工作的稳定性和可靠性研究. 电子测量技术. 2020(12): 55-59 . 百度学术8. 周颖,刘璐璐,韩鹭. 基于量化依赖Lyapunov函数的时变时延网络控制系统的鲁棒控制. 南京邮电大学学报(自然科学版). 2020(04): 57-63 . 百度学术9. 陈贺婉,李虎,陆慧娟. 短距离无线通信CSD数据传输持续丢帧测试仿真. 计算机仿真. 2020(06): 142-146 . 百度学术其他类型引用(14)
-

 下载:
下载:

计量
- 文章访问数: 2200
- HTML全文浏览量: 230
- PDF下载量: 926
- 被引次数: 23
