

Guaranteed Cost Control of Networked Control Systems With Bounded Packet Loss Based on Quantization Dependent Lyapunov Function
-
摘要: 研究了一类具有有界丢包的网络控制系统(Networked control systems,NCSs)的保成本控制问题,提出了一种包含量化反馈的网络控制系统数学模型,该模型将系统的镇定问题转化为镇定一系列子系统的鲁棒控制问题.在对网络控制系统的分析中,区别于常用的二次型Lyapunov函数,本文采用了一种新的且能够降低保守性的量化依赖Lyapunov函数方法.基于本文的Lyapunov函数,得到了充分考虑丢包过程的保成本控制器的设计方法.仿真算例验证了所给出方法的有效性.
-
关键词:
- 网络控制系统 /
- 保成本控制 /
- 量化反馈 /
- Lyapunov函数
Abstract: This paper investigates modeling and guaranteed cost control of quantized feedback systems over networks with bounded packet loss. The model of the networked control systems, which appropriately incorporates quantized feedback, is established in terms of robust control which transforms the problem of stabilization of networked control systems with packet loss into the problem of robust stabilization of a class of subsystems. Unlike the quadratic Lyapunov function which is normally used in analyzing networked control systems, this paper presents a new approach that can significantly reduce conservativeness by taking the quantization dependent Lyapunov function. Based on the provided Lyapunov function, a guaranteed cost state feedback controller is derived, which explicitly considers the packet loss process. A numerical example illustrates the effectiveness of the proposed method.1) 本文责任编委 吴立刚 -
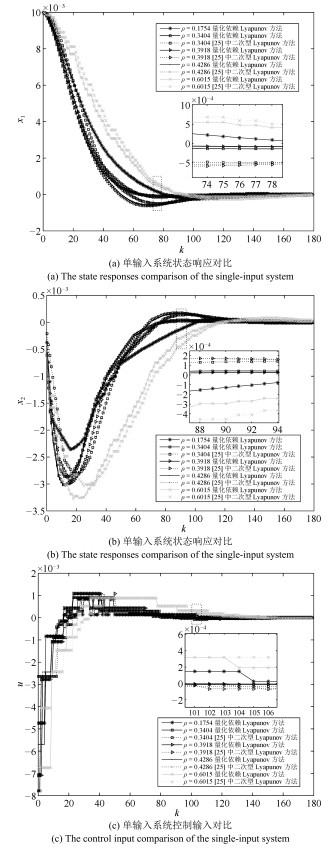
图 3 单输入系统状态响应及控制输入
Fig. 3 The state responses and control input of the single-input system
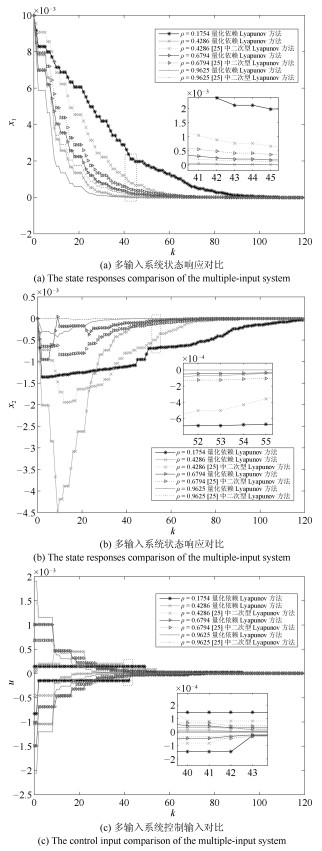
图 4 多输入系统状态响应及控制输入
Fig. 4 The state responses and control input of the multiple-input system
表 1 两种Lyapunov函数方法下的反馈增益$K$及性能指标$J$对比
Table 1 Comparison of feedback gain $K$ and performance index $J$ values using two Lyapunov function methods
系统 量化密度$\rho$值 方法 反馈增益$K$值 性能指标$J$值 单输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.5888 & -1.6344 \end{array}\right]$ $0.0022$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.3404$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.6563 & -1.5303\end{array}\right]$ $0.0020$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.4870 & -1.0089\end{array}\right]$ $0.0022$ $\rho=0.3918$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.6691 & -1.5135\end{array}\right]$ $0.0018$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.5079 & -1.0487\end{array}\right]$ $0.0020$ $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.6764 & -1.5042\end{array}\right]$ $0.0019$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.5214 & -1.0764\end{array}\right]$ $0.0020$ $\rho=0.6015$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc}-0.7054 & -1.4931\end{array}\right]$ $0.0034$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.5835 & -1.2062\end{array}\right]$ $0.0035$ 多输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.0642 & -0.0508\\ 0.0173 & -0.0746 \end{array}\right]$ $0.0016$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.1380 & -0.0674\\ 0.0035 & -0.1285\end{array}\right]$ $0.0007$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.0717 & -0.0274\\0.0122 & -0.1371\end{array}\right]$ $0.0012$ $\rho=0.6794$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.1286 & -0.0582\\ 0.1125 & -0.0763\end{array}\right]$ $0.0005$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.1085 & -0.0579\\0.0833 & -0.0777\end{array}\right]$ $0.0007$ $\rho=0.9625$ 量化依赖Lyapunov方法 $\left[\begin{array}{ccc} -0.2041 & -0.0577\\ 0.1914 & -0.1517\end{array}\right]$ $0.0003$ [25]中二次型Lyapunov方法 $\left[\begin{array}{ccc}-0.1455 & -0.0601\\0.1445 & -0.0785\end{array}\right]$ $0.0004$  下载: 导出CSV
下载: 导出CSV
-
[1] Hespanha J P, Naghshtabrizi P, Xu Y G. A survey of recent results in networked control systems. Proceedings of the IEEE, 2007, 95(1):138-162 doi: 10.1109/JPROC.2006.887288 [2] Walsh G C, Ye H, Bushnell L G. Stability analysis of networked control systems. IEEE Transactions on Control Systems Technology, 2002, 10(3):438-446 doi: 10.1109/87.998034 [3] 孙业国, 秦世引.有界丢包网络控制系统的稳定性与能稳性.自动化学报, 2011, 37(1):113-117 http://www.aas.net.cn/CN/abstract/abstract17413.shtmlSun Ye-Guo, Qin Shi-Yin. Stability and stabilization of networked control systems with bounded packet dropout. Acta Automatica Sinica, 2011, 37(1):113-117 http://www.aas.net.cn/CN/abstract/abstract17413.shtml [4] Tang X M, Ding B C. Model predictive control of linear systems over networks with data quantizations and packet losses. Automatica, 2013, 49(5):1333-1339 doi: 10.1016/j.automatica.2013.02.033 [5] 游科友, 谢立华.网络控制系统的最新研究综述.自动化学报, 2013, 39(2):101-118 http://www.aas.net.cn/CN/abstract/abstract17806.shtmlYou Ke-You, Xie Li-Hua. Survey of recent progress in networked control systems. Acta Automatica Sinica, 2013, 39(2):101-118 http://www.aas.net.cn/CN/abstract/abstract17806.shtml [6] Shi P, Zhang Y Q, Chadli M, Agarwal R K. Mixed H-infinity and passive filtering for discrete fuzzy neural networks with stochastic jumps and time delays. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(4):903-909 doi: 10.1109/TNNLS.2015.2425962 [7] Seiler P, Sengupta R. An H∞ approach to networked control. IEEE Transactions on Automatic Control, 2005, 50(3):356-364 doi: 10.1109/TAC.2005.844177 [8] Zou Y Y, Lam J, Niu Y G, Li D W. Constrained predictive control synthesis for quantized systems with Markovian data loss. Automatica, 2015, 55:217-225 doi: 10.1016/j.automatica.2015.03.016 [9] Zhang W, Branicky M S, Phillips S M. Stability of networked control systems. IEEE Control Systems Magazine, 2001, 21(1):84-99 doi: 10.1109/37.898794 [10] 魏善碧, 丁宝苍, 柴毅.有界丢包网络环境下不确定系统的预测控制.控制与决策, 2009, 24(9):1326-1330 doi: 10.3321/j.issn:1001-0920.2009.09.009Wei Shan-Bi, Ding Bao-Cang, Chai Yi. Predictive control of uncertain systems under networked environment with bounded packet loss. Control and Decision, 2009, 24(9):1326-1330 doi: 10.3321/j.issn:1001-0920.2009.09.009 [11] Ding B C. A synthesis approach of model predictive control for linear systems over networks with bounded packet loss. In: Proceedings of the 8th IEEE International Conference on Control and Automation (ICCA). Xiamen, China: IEEE, 2010. 2258-2263 [12] Xiong J L, Lam J. Stabilization of linear systems over networks with bounded packet loss. Automatica, 2007, 43(1):80-87 doi: 10.1016/j.automatica.2006.07.017 [13] Ishii H, Francis B A. Quadratic stabilization of sampled-data systems with quantization. Automatica, 2003, 39(10):1793-1800 doi: 10.1016/S0005-1098(03)00179-1 [14] Liberzon D. Hybrid feedback stabilization of systems with quantized signals. Automatica, 2003, 39(9):1543-1554 doi: 10.1016/S0005-1098(03)00151-1 [15] Liu J L, Elia N. Quantized feedback stabilization of non-linear affine systems. International Journal of Control, 2004, 77(3):239-249 doi: 10.1080/00207170310001655336 [16] Bicchi A, Marigo A, Piccoli B. On the reachability of quantized control systems. IEEE Transactions on Automatic Control, 2002, 47(4):546-563 doi: 10.1109/9.995034 [17] 王隔霞.一类非线性系统的量化控制器的设计.自动化学报, 2016, 42(1):140-144 http://www.aas.net.cn/CN/abstract/abstract18803.shtmlWang Ge-Xia. Design of quantizer for a class of nonlinear systems. Acta Automatica Sinica, 2016, 42(1):140-144 http://www.aas.net.cn/CN/abstract/abstract18803.shtml [18] Brockett R W, Liberzon D. Quantized feedback stabilization of linear systems. IEEE Transactions on Automatic Control, 2000, 45(7):1279-1289 doi: 10.1109/9.867021 [19] Fagnani F, Zampieri S. Stability analysis and synthesis for scalar linear systems with a quantized feedback. IEEE Transactions on Automatic Control, 2003, 48(9):1569-1584 doi: 10.1109/TAC.2003.816982 [20] Ji M M, Li Z J, Zhang W D. Quantized feedback stabilization of discrete-time linear system with Markovian jump packet losses. Neurocomputing, 2015, 158:307-314 doi: 10.1016/j.neucom.2014.08.058 [21] Zanma T, Azegami M, Liu K Z. Optimal input and quantization interval for quantized feedback system with variable quantizer. IEEE Transactions on Industrial Electronics, 2017, 64(3):2246-2254 doi: 10.1109/TIE.2016.2625240 [22] Wakaiki M, Yamamoto Y. Stabilisation of switched systems with sampled and quantised output feedback. IET Control Theory and Applications, 2017, 11(12):1913-1921 doi: 10.1049/iet-cta.2016.1299 [23] Li F B, Shi P, Wu L G, Basin M V, Lim C C. Quantized control design for cognitive radio networks modeled as nonlinear semi-markovian jump systems. IEEE Transactions on Industrial Electronics, 2015, 62(4):2330-2340 doi: 10.1109/TIE.2014.2351379 [24] Elia N, Mitter S K. Stabilization of linear systems with limited information. IEEE Transactions on Automatic Control, 2001, 46(9):1384-1400 doi: 10.1109/9.948466 [25] Fu M Y, Xie L H. The sector bound approach to quantized feedback control. IEEE Transactions on Automatic Control, 2005, 50(11):1698-1711 doi: 10.1109/TAC.2005.858689 [26] Gao H J, Chen T W. A new approach to quantized feedback control systems. Automatica, 2008, 44(2):534-542 doi: 10.1016/j.automatica.2007.06.015 [27] Wang F, Chen B, Lin C, Zhang J, Meng X Z. Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Transactions on Cybernetics, 2017, 48(6):1839-1848 http://dblp.uni-trier.de/db/journals/tcyb/tcyb48.html#WangCLZM18 [28] Tatikonda S, Mitter S. Control under communication constraints. IEEE Transactions on Automatic Control, 2004, 49(7):1056-1068 doi: 10.1109/TAC.2004.831187 [29] Che W W, Mei Z Y. Robustness guaranteed cost control for discrete-time systems with dynamic quantization. In: Proceedings of the 33rd Chinese Control Conference (CCC). Nanjing, China: IEEE, 2014. 5824-5829 [30] Duan K, Cai Y Z, Zhang W D. Stabilization of dynamic quantized system with faults. In: Proceedings of the 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015. 6541-6545 [31] Okajima H, Sawada K, Matsunaga N. Dynamic quantizer design under communication rate constraints. IEEE Transactions on Automatic Control, 2016, 61(10):3190-3196 doi: 10.1109/TAC.2015.2509438 [32] Takahashi R, Azuma S, Hikihara T. Power regulation with predictive dynamic quantizer in power packet dispatching system. IEEE Transactions on Industrial Electronics, 2016, 63(12):7653-7661 doi: 10.1109/TIE.2016.2591898 -

 下载:
下载:


图(4) / 表(1)
计量
- 文章访问数: 2352
- HTML全文浏览量: 252
- PDF下载量: 926
- 被引次数: 0
