

-
摘要: 针对大规模传感器网络(Large-scale sensor networks)的目标跟踪问题, 本文在贝叶斯(Bayes)框架下, 提出了一种全新的基于传感器选择的多传感器目标跟踪算法.算法的具体思路为:首先基于Bayes框架, 根据不同的管理目标, 推导出传感器选择的目标函数; 然后根据目标函数, 计算出相应的传感器选择方案; 最后将选择的传感器进行数据融合, 求得传感器网络的目标跟踪结果.相比传统的基于量测野值点剔除思想的目标跟踪算法以及基于系统偏差估计的传感器配准算法, 本文提出的基于传感器选择的多传感器目标跟踪算法不仅目标跟踪精度更高, 且跟踪性能更稳定.同时本文提出的传感器选择算法还可以适用于杂波数目较少的目标跟踪场景.仿真结果说明了本文所提算法的有效性.Abstract: In large-scale sensor networks, a target tracking approach based on sensor selection is presented in the Bayes framework.The proposed approach mainly contains the following three steps.Firstly, the objective function is obtained in the Bayes framework.Then, the sensor selection strategy is adopted according to the objective function.Finally, tracking results are obtained by fusion of those selected sensors.Compared with the traditional target tracking approach, the proposed sensor selection approach is much easier and more reliable.Moreover, the clustered target tracking scenarios are considered in this research, thus so the proposed approach is robust for target tracking applications.Simulation results show the effectiveness of the proposed approach.
-
Key words:
- Large-scale sensor network /
- Bayes framework /
- sensor selection /
- target tracking /
- information fusion
1) 本文责任编委 潘泉 -
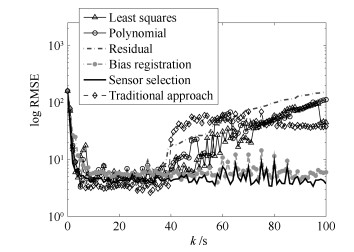
图 4 位置估计RMSE结果的对数值随时间的变化曲线
Fig. 4 The logic RMSE results on target position via sampling time
-
[1] Bar-Shalom Y, Li X R.Mutitarget-Mutisensor Tracking:Principles and Techniquesl.Storrs:YBS Press, 1995. [2] 韩崇昭, 朱洪艳, 段战胜.多源信息融合.北京:清华大学出版社, 2006.Han Chong-Zhao, Zhu Hong-Yan, Duan Zhan-Sheng.Multi-Source Information Fusion.Beijing:Tsinghua University Press, 2006. [3] 潘泉, 程咏梅, 梁彦, 杨峰, 王小旭.多源信息融合理论及应用.北京:清华大学出版社, 2013.Pan Quan, Cheng Yong-Mei, Liang Yan, Yang Feng, Wang Xiao-Xu.Multi-Source Information Fusion Theory and Its Applications.Beijing:Tsinghua University Press, 2013. [4] Zhou Y F, Leung H, Blanchette M.Sensor alignment with Earth-centered Earth-fixed (ECEF) coordinate system.IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(2):410-418 doi: 10.1109/7.766925 [5] Okello N N, Challa S.Joint sensor registration and track-to-track fusion for distributed trackers.IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(3):808-823 doi: 10.1109/TAES.2004.1337456 [6] Li Z H, Chen S Y, Leung H, Bosse E.Joint data association, registration, and fusion using EM-KF.IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(2):496-507 doi: 10.1109/TAES.2010.5461637 [7] Huang D L, Leung H, Bosse E.A pseudo-measurement approach to simultaneous registration and track fusion.IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3):2315-2331 doi: 10.1109/TAES.2012.6237594 [8] 吴翊, 朱炬波.弹道数据处理的融合算法.中国科学(E辑), 1998, 28(6):505-512 http://www.cqvip.com/QK/98492X/199806/3297162.htmlWu Yi, Zhu Ju-Bo.A fusion method for estimate of trajectory.Science in China Series E:Technological Sciences, 1999, 42(2):149-156 http://www.cqvip.com/QK/98492X/199806/3297162.html [9] 连峰, 韩崇昭, 彭一峰, 刘煜.基于广义似然比的自适应在线配准算法.控制与决策, 2009, 24(1):23-28 doi: 10.3321/j.issn:1001-0920.2009.01.005Lian Feng, Han Chong-Zhao, Peng Yi-Feng, Liu Yu.Adaptive on-line registration algorithm based on GLR.Control and Decision, 2009, 24(1):23-28 doi: 10.3321/j.issn:1001-0920.2009.01.005 [10] 徐利娜, 陈俊彪, 穆高超.靶场外弹道数据处理中的实时野值剔除算法.应用光学, 2012, 33(1):90-95 http://d.old.wanfangdata.com.cn/Periodical/yygx201201016Xu Li-Na, Chen Jun-Biao, Mu Gao-Chao.New algorithm for real-time outlier removal data in data processing of exterior trajectory.Journal of Applied Optics, 2012, 33(1):90-95 http://d.old.wanfangdata.com.cn/Periodical/yygx201201016 [11] 卓宁.靶场外弹道数据处理中野值点剔除方法.测试技术学报, 2008, 22(4):313-317 doi: 10.3969/j.issn.1671-7449.2008.04.007Zhuo Ning.Study on outlier eliminating method for data processing of exterior trajectory.Journal of Test and Measurement Technology, 2008, 22(4):313-317 doi: 10.3969/j.issn.1671-7449.2008.04.007 [12] 刘利生.外弹道测量数据处理.北京:国防工业出版社, 2002.Liu Li-Sheng.Data Processing for External Trajectory Measurements.Beijing:National Defense Industry Press, 2002. [13] 贺明科, 王正明, 朱炬波.多传感器目标跟踪的实时剔野方法.宇航学报, 2002, 23(6):34-37 doi: 10.3321/j.issn:1000-1328.2002.06.006He Ming-Ke, Wang Zheng-Ming, Zhu Ju-Bo.Realtime outliers detection in multi-sensor target traching.Journal of Astronautics, 2002, 23(6):34-37 doi: 10.3321/j.issn:1000-1328.2002.06.006 [14] 王光新, 王云江, 吴翊, 赵城利, 姚静.基于加权融合的多信源弹道数据实时野值检测方法.飞行器测控学报, 2005, 24(6):44-48 http://d.old.wanfangdata.com.cn/Periodical/fxqckxb200506009Wang Guang-Xin, Wang Yun-Jiang, Wu Yi, Zhao Cheng-Li, Yao Jing.Real-time outliers detection in multi-source trajectory data based on weighted fusion.Journal of Spacecraft TT & C Technology, 2005, 24(6):44-48 http://d.old.wanfangdata.com.cn/Periodical/fxqckxb200506009 [15] 刘先省, 申石磊, 潘泉.传感器管理及方法综述.电子学报, 2002, 30(3):394-398 doi: 10.3321/j.issn:0372-2112.2002.03.023Liu Xian-Xing, Shen Shi-Lei, Pan Quan.A survey of sensor management and methods.Acta Electronica Sinica, 2002, 30(3):394-398 doi: 10.3321/j.issn:0372-2112.2002.03.023 [16] Hero Jr A O, Castanón D, Cochran D, Kastella K.Foundations and Applications of Sensor Management.New York, USA:Springer Verlag Press, 2007. [17] Hero A O, Cochran D.Sensor management:past, present, and future.IEEE Sensors Journal, 2011, 11(12):3064-3075 doi: 10.1109/JSEN.2011.2167964 [18] 杨小军, 马祥, 宋青松, 邢科义.基于条件后验克拉美-罗下界的目标跟踪传感器管理.控制理论与应用, 2013, 30(5):543-548 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305002Yang Xiao-Jun, Ma Xiang, Song Qing-Song, Xing Ke-Yi.Sensor management for target tracking based on conditional posterior Cramér-Rao lower bounds.Control Theory and Applications, 2013, 30(5):543-548 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305002 [19] Hernandez M L, Kirubarajan T, Bar-Shalom Y.Multisensor resource deployment using posterior Cramér-Rao bounds.IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(2):399-416 doi: 10.1109/TAES.2004.1309993 [20] Zhu H Y, Chen S, Han C Z, Lin Y. Fusion of possible biased local estimates in sensor network based on sensor selection. In: Proceedings of the 16th International Conference on Information Fusion. Istanbul, Turkey: IEEE, 2013. 357-364 [21] 朱洪艳, 陈硕, 韩崇昭.考虑局部估计误差相关性的传感器选择融合.控制与决策, 2015, 30(2):241-245 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201502007Zhu Hong-Yan, Chen Shuo, Han Chong-Zhao.Sensor selection-based fusion considering cross-correlation of local estimation errors.Control and Decision, 2015, 30(2):241-245 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201502007 [22] Shen X J, Varshney P K.Sensor selection based on generalized information gain for target tracking in large sensor networks.IEEE Transactions on Signal Processing, 2014, 62(2):363-375 doi: 10.1109/TSP.2013.2289881 [23] Gupta V, Chung T H, Hassibi B, Murray R M.On a stochastic sensor selection algorithm with applications in sensor scheduling and sensor coverage.Automatica, 2006, 42(2):251-260 doi: 10.1016/j.automatica.2005.09.016 [24] Joshi S, Boyd S.Sensor selection via convex optimization.IEEE Transactions on Signal Processing, 2009, 57(2):451-462 doi: 10.1109/TSP.2008.2007095 [25] Tharmarasa R, Kirubarajan T, Sinha A, Lang T.Decentralized sensor selection for large-scale multisensor-multitarget tracking.IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2):1307-1324 doi: 10.1109/TAES.2011.5751260 [26] Tharmarasa R, Kirubarajan T, Hernandez M L, Sinha A.PCRLB-based multisensor array management for multitarget tracking.IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(2):539-555 doi: 10.1109/TAES.2007.4285352 [27] Bar-Shalom Y, Daum F, Huang J.The probabilistic data association filter.IEEE Control Systems, 2009, 29(6):82-100 doi: 10.1109/MCS.2009.934469 -

 下载:
下载:





图(8) / 表(1)
计量
- 文章访问数: 2508
- HTML全文浏览量: 320
- PDF下载量: 1000
- 被引次数: 0
