

-
摘要: 研究了具有输入饱和且存在横荡运动的欠驱动船舶在水面上运动的编队控制问题.使用Leader-follower方法,将编队控制问题转化为镇定控制问题.给出了不同于Backstepping方法的编队控制器设计三步法,该方法有助于克服输入饱和的影响,并分析了闭环系统的稳定性.进一步,将跟随船控制输入中的微分、虚拟领航船的加速度、跟随船动力学模型的不确定性和外扰统一视为干扰,应用干扰观测器估计并在控制器中给予补偿.仿真结果表明了方法的有效性.Abstract: This paper addresses the control problem of underactuated ship formation sailing on ocean with input saturation and sway motion. By means of the leader-follower method, the problem is converted into a stablization problem. A three-step formation control design method is given, which is different from the backstepping method and can help overcome the influence of input saturation. Then, the stability of the closed-loop system is analyzed. Moreover, the differential of the controllers of the followers, the acceleration of the virtual leader, and the uncertainties and external disturbances in the dynamics models of the followers are all viewed as disturbances. These disturbances are estimated by using the disturbance observers and thus the controllers are compensated. Simulation is presented to illustrate the effectiveness of the method.
-
Key words:
- Ship formation control /
- underactuated /
- input saturation /
- nonlinear control
-
近年来, 编队控制成为控制领域的研究热点问题, 引起了很多学者的关注[1-3], 在航空航天、航海、工业等领域均有广阔的应用前景.在航海领域, 编队控制可应用于舰队的协同作战、航行补给、环境监测、石油和天然气探测等[4].船舶在平面上运动的编队控制目前已经取得了较多的研究成果[5-17].文献[5-10]使用Backstepping、神经网络控制和基于无源性理论等方法研究了全驱动船舶的编队控制问题.文献[11]考虑船舶在固定航速下, 给出了一种基于庞德里亚金极大值原理的编队控制算法.
欠驱动船舶在纵向、横荡和艏摇三个自由度运动时, 未能获得直接横向推进力, 其控制输入向量维数小于自由度维数.相比全驱动船舶的编队控制而言, 欠驱动船舶的编队控制更为困难.文献[12]将欠驱动水下自主航行器在平面上曲线跟踪的编队控制转化成领航者、跟随者的$n$个路径跟随以及跟随船纵向距离的控制, 但期望队形在纵向距离上必须为零, 未考虑系统的不确定性和外扰.文献[13]使用Backstepping方法研究了欠驱动水下自主航行器平面运动的编队控制.文献[14]使用Backstepping方法和神经网络方法研究了横荡速度无源有界假设下, 欠驱动水面自主航行器的编队控制.文献[15]在文献[14]的基础上, 应用动态面控制技术对虚拟控制输入的微分进行估计, 减少了在线计算量.文献[16]给出了控制输入受限情况下, 欠驱动水下自主航行器在平面上运动的编队控制器设计, 没有分析系统的稳定性, 仅给出仿真结果.
现有船舶编队控制较多采用Backstepping方法, 较少考虑控制输入饱和问题. Backstepping方法需要递推构造Lyapunov函数, 其过程较为复杂.在欠驱动的船舶编队控制中, 使用Backstepping等方法时, 若在艏摇角速度虚拟控制输入中引入距离或角度状态的相乘项或相除项, 易导致艏摇角速度过大, 造成船舶回转直径过小、横摇角度较大的现象.此外, 在系统存在不确定性和外扰的情况下, 已有干扰观测器的研究表明, 其能够较好估计低频变化的参数不确定性和外扰[18].相比神经网络控制方法而言, 干扰观测器结构简单; 相比鲁棒控制而言, 多数的鲁棒控制方法对系统不确定参数需符合有界约束条件, 但干扰观测器无需此约束条件.
本文使用Leader-follower方法将船舶分成虚拟领航船和跟随船, 其中跟随船存在横荡运动.将欠驱动船舶的编队控制器设计分成三步: 1)设计跟随船艏摇角速度虚拟控制器; 2)设计跟随船纵向速度虚拟控制器; 3)设计跟随船动力学控制器.在控制器设计中, 引入双曲正切函数用于克服控制输入饱和的影响.进一步, 考虑跟随船无法获知虚拟领航船的加速度、跟随船动力学模型的不确定性和外扰的影响, 以及避免计算控制输入中的微分, 文中将其统一视为干扰, 应用干扰观测器进行估计, 并在控制器当中给予补偿.本文的一个主要贡献是, 对于具有领航船的欠驱动船舶编队控制, 转化为三个子系统的控制器设计, 从而有效地降低了编队控制器设计的复杂性.
1. 系统模型与问题描述
记{$O$}、{$B_L$}和{$B_i$}分别表示惯性坐标系、虚拟领航船的船体坐标系和跟随船$i$的船体坐标系$\left( i=1, 2\cdots, n \right)$, $u_{\scriptscriptstyle L}$、$v_{\scriptscriptstyle L}$和$r_{\scriptscriptstyle L}$分别表示虚拟领航船的纵向速度、横荡速度和艏摇角速度, $u_i$、$v_i$和$r_i$分别表示跟随船$i$的纵向速度、横荡速度和艏摇角速度, $\psi_{\scriptscriptstyle L}$和$\psi_i$分别表示虚拟领航船的航向和跟随船$i$的航向, $\beta_i$表示跟随船$i$的漂角.虚拟领航船和跟随船$i$在水面上的运动如图 1所示.
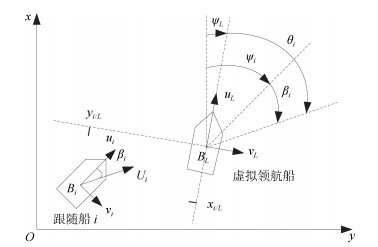 图 1 跟随船i和虚拟领航船的运动示意图Fig. 1 Motion sketch map of the follower i and the virtual leader
图 1 跟随船i和虚拟领航船的运动示意图Fig. 1 Motion sketch map of the follower i and the virtual leader通过坐标旋转, 由图 1可得:
$ \begin{eqnarray} \left\{\begin{aligned} &x_{i{\scriptscriptstyle /L}} = \left( x_{i{\scriptscriptstyle /O}}-x_{\scriptscriptstyle L/O} \right) \cos{\psi_{\scriptscriptstyle L}} + \\ &~~~~~~~~~~~ \left( y_{i{\scriptscriptstyle /O}}-y_{\scriptscriptstyle L/O} \right) \sin{\psi_{\scriptscriptstyle L}} \\ &y_{i{\scriptscriptstyle /L}} = \left( y_{i{\scriptscriptstyle /O}}-y_{\scriptscriptstyle L/O} \right) \cos{\psi_{\scriptscriptstyle L}} - \\ &~~~~~~~~~~~ \left( x_{i{\scriptscriptstyle /O}}-x_{\scriptscriptstyle L/O} \right) \sin{\psi_{\scriptscriptstyle L}} \\ &\theta_i = \psi_i + \beta_i - \psi_{\scriptscriptstyle L} \end{aligned}\right. \end{eqnarray} $
(1) 其中, $\left( x_{\scriptscriptstyle L/O}, y_{\scriptscriptstyle L/O} \right)$、$\left( x_{i{\scriptscriptstyle /L}}, y_{i{\scriptscriptstyle /L}} \right)$和$\left( x_{i{\scriptscriptstyle /O}}, y_{i{\scriptscriptstyle /O}} \right)$分别表示虚拟领航船在$\{O\}$坐标系的坐标、跟随船$i$在$\{B_L\}$坐标系的坐标和跟随船$i$在$\{O\}$坐标系的坐标.
虚拟领航船和跟随船$i$在$\{O\}$坐标系中纵向、横荡和艏摇三个自由度的运动学方程为
$ \begin{eqnarray} \left\{\begin{aligned} &\dot{x}_{\scriptscriptstyle L/O} = u_{\scriptscriptstyle L} \cos{\psi_{\scriptscriptstyle L}} - v_{\scriptscriptstyle L} \sin{\psi_{\scriptscriptstyle L}} \\ &\dot{y}_{\scriptscriptstyle L/O} = u_{\scriptscriptstyle L} \sin{\psi_{\scriptscriptstyle L}} + v_{\scriptscriptstyle L} \cos{\psi_{\scriptscriptstyle L}} \\ &\dot{\psi}_{\scriptscriptstyle L} = r_{\scriptscriptstyle L} \end{aligned}\right. \end{eqnarray} $
(2a) $ \begin{eqnarray} \left\{\begin{aligned} &\dot{x}_{i{\scriptscriptstyle /O}} = u_i \cos{\psi_i} - v_i \sin{\psi_i}~~~~ \\ &\dot{y}_{i{\scriptscriptstyle /O}} = u_i \sin{\psi_i} + v_i \cos{\psi_i} \\ &\dot{\psi}_i = r_i \end{aligned}\right. \end{eqnarray} $
(2b) 对式(1)进行求导, 并将式(2)代入, 可得跟随船$i$与虚拟领航船位置偏差$\left( x_{i{\scriptscriptstyle /L}}, y_{i{\scriptscriptstyle /L}} \right)$和跟随船$i$航迹角与虚拟领航船航向偏差$\theta_i$的方程为
$ \begin{eqnarray} \left\{\begin{aligned} &\dot{x}_{i{\scriptscriptstyle /L}} = -u_{\scriptscriptstyle L} + U_i \cos{\theta_i} + r_{\scriptscriptstyle L} y_{i{\scriptscriptstyle /L}} \\ &\dot{y}_{i{\scriptscriptstyle /L}} = -v_{\scriptscriptstyle L} + U_i \sin{\theta_i} - r_{\scriptscriptstyle L} x_{i{\scriptscriptstyle /L}} \\ &\dot{\theta}_i = -r_{\scriptscriptstyle L} + r_i + \dot{\beta}_i \end{aligned}\right. \end{eqnarray} $
(3a) 其中, $U_i=\sqrt{ u_i^2+v_i^2 }$.
记跟随船$i$黏性水动力和力矩为$X_{Hi}=X_{Hi}\left( u_i, v_i, r_i \right)$, $Y_{Hi}=Y_{Hi}\left( u_i, v_i, r_i \right)$, $N_{Hi}=N_{Hi}\left( u_i, v_i, r_i \right)$; 跟随船$i$纵向控制力和艏摇控制力矩分别为$X_{\tau i}$和$N_{\tau i}$; 跟随船$i$船体重心在{$B_i$}, 坐标系中的位置为$\left( x_{gi}, 0 \right)$.跟随船$i$在水面上三个自由度运动的动力学方程为[19-20]
$ \begin{eqnarray} \left\{\begin{aligned} &\left( m_i - X_{\dot{u}i} \right) \dot{u}_i = X_i + X_{\tau i} \\ &\left( m_i - Y_{\dot{v}i} \right) \dot{v}_i + \left( m_i x_{gi} - Y_{\dot{r}i} \right) \dot{r}_i = Y_i \\ &\left( m_i x_{gi} - N_{\dot{v}i} \right) \dot{v}_i + \left( I_{zi} - N_{\dot{r}i} \right)\dot{r}_i= N_i + N_{\tau i} \\ \end{aligned}\right. \end{eqnarray} $
(3b) 其中, $X_i = m_i v_i r_i + m_i x_{gi} {r_i}^2 + X_{Hi}$, $Y_i = Y_{Hi} - m_i u_i r_i$, $N_i = -m_i x_{gi} u_i r_i + N_{Hi}$.
在$\{B_L\}$坐标系中, 设跟随船$i$和虚拟领航船期望保持的队形距离$x_{di}$和$y_{di}$为已知常数.编队队形类似于虚拟的刚性结构.记跟随船$i$和虚拟领航船队形期望值与实际值的误差$x_{ei} = x_{i{\scriptscriptstyle /L}} - x_{di}$, $y_{ei} = y_{i{\scriptscriptstyle /L}} - y_{di}$, 跟随船$i$纵向速度虚拟控制输入与实际值的误差$u_{ei} = u_{i} - u_{\tau i}$, 跟随船$i$艏摇角速度虚拟控制输入与实际值的误差$r_{ei} = r_{i} - r_{\tau i}$.
令
$ \begin{eqnarray*} \begin{aligned} & \theta_{di} = \theta'_{di} + \theta''_{di} \\ & \theta'_{di} = -\alpha_i \tanh \left( k_{yei} y_{ei} \right) \\ & \theta''_{di} = \arcsin \displaystyle\frac{r_{\scriptscriptstyle L} x_{di}} {U_i \cos{\theta'_{di}} } \end{aligned} \end{eqnarray*} $
其中, $0<\alpha_i<0.5\pi $, $k_{yei}>0$.
记跟随船$i$航迹角与虚拟领航船航向偏差的期望值与实际值误差$\theta_{ei} = \theta_{i} - \theta_{di}$.
令
$ \begin{eqnarray*} \left[\begin{array}{cc} m_{11i} & m_{12i} \\ m_{21i} & m_{22i} \end{array}\right] ={\left[\begin{array}{cc} m_i - Y_{\dot{v}i} & m_i x_{gi} - Y_{\dot{r}i} \\ m_i x_{gi} - N_{\dot{v}i} & I_{zi} - N_{\dot{r}i} \end{array} \right]}^{-1} \end{eqnarray*} $
则误差$x_{ei}$, $y_{ei}$, $\theta_{ei}$, $u_{ei}$, $r_{ei}$满足方程:
$ \begin{eqnarray} \left\{\begin{aligned} &\dot{x}_{ei} = \sqrt{{\left( u_{\tau i}+u_{ei} \right)}^2+v_i^2} \cos\left( {\theta_{di}+\theta_{ei}}\right)- \\ &~~~~~~~~~~ u_{\scriptscriptstyle L}+r_{\scriptscriptstyle L} \left( y_{ei}+y_{di} \right) \\ &\dot{y}_{ei} = U_i \sin\left( \theta_{di} + \theta_{ei} \right) - v_{\scriptscriptstyle L} - r_{\scriptscriptstyle L} \left( x_{ei} + x_{di} \right) \end{aligned}\right. \end{eqnarray} $
(4a) $ \begin{eqnarray} \dot{\theta}_{ei} = r_{\tau i}+r_{ei} + \dot{\beta}_{i} - r_{\scriptscriptstyle L} - \dot{\theta}_{di} \hspace{2.5cm} \end{eqnarray} $
(4b) $ \begin{eqnarray} \left\{\begin{aligned} &\dot{u}_{ei} = {\left( m_i-X_{\dot{u}i} \right)}^{-1} {\left( X_i+ X_{\tau i} \right)-\dot{u}_{\tau i}} \hspace{1cm} \\ &\dot{r}_{ei} = m_{21i} Y_i+m_{22i}\left( N_i+N_{\tau i} \right)-\dot{r}_{\tau i} \end{aligned}\right. \end{eqnarray} $
(4c) 引入如下假设:
假设1. 虚拟领航船纵向速度$u_{\scriptscriptstyle L} > \left| v_i \right|$, 横荡速度$v_{\scriptscriptstyle L}=0$, 艏摇角速度$\left| r_{\scriptscriptstyle L} \right| < \left| \displaystyle\frac{U_{i} \cos {\theta'_{di}} } {x_{di}} \right| $且$\left| r_{\scriptscriptstyle L} \right| < \left| \displaystyle\frac{u_{\scriptscriptstyle L}-\left| v_i \right|}{y_{di}} \right|$.
假设2. 所有跟随船均可获知虚拟领航船位置、航向和速度.
注1. 对于船舶编队中存在实际领航船的情形, 可转化为本文使用虚拟领航船的情形.记实际领航船的纵向速度、横荡速度和艏摇角速度分别为$u'_{\scriptscriptstyle L}$、$v'_{\scriptscriptstyle L}$和$r'_{\scriptscriptstyle L}$, 航向和漂角分别为${\psi }'_{\scriptscriptstyle L}$和${\beta}'_{\scriptscriptstyle L}$, 则令虚拟领航船纵向速度$u_{\scriptscriptstyle L}=\sqrt{{u'_{\scriptscriptstyle L}}^2+{v'_{\scriptscriptstyle L}}^2}$, 横荡速度$v_{\scriptscriptstyle L}=0$, 艏摇角速度$r_{\scriptscriptstyle L}=r'_{\scriptscriptstyle L}+\dot{\beta}'_{\scriptscriptstyle L}$, 航向$\psi_{\scriptscriptstyle L}={\psi}'_{\scriptscriptstyle L}+{\beta}'_{\scriptscriptstyle L}$.若实际领航船的速度不可获知, 可采用跟踪-微分器等方法通过实际领航船的位置来估计其速度.
注2. 假设1中跟随船$i$的横荡速度$\left| v_i \right| < u_{\scriptscriptstyle L} $, 当跟随船$i$的横向出现外扰时, 由于船舶横向的附加质量较大, 则其横荡速度较小.横向出现外扰的情形未能满足横荡速度无源性, 这样就降低了文献[14-15]横荡速度无源有界假设的保守性.
若系统(4)是指数稳定的, 则$\lim_{t\rightarrow{\infty}} x_{i{\scriptscriptstyle /L}}=x_{di}$, $\lim_{t\rightarrow{\infty}} y_{i{\scriptscriptstyle /L}}=y_{di}$, $\lim_{t\rightarrow{\infty}} \theta_{ei}=0$即每艘跟随船与虚拟领航船的位置偏差均收敛到期望值, 从而实现了队形稳定的目的.这样, 本文考虑的具有输入饱和的欠驱动船舶编队控制问题, 就可转化为系统(4)的镇定控制问题.
2. 具有输入饱和的船舶编队控制
假设虚拟领航船纵向加速度$\dot{u}_{\scriptscriptstyle L}$和艏摇角加速度$\dot{r}_{\scriptscriptstyle L}$为已知.
若$u_{ei}=0$, $\theta_{ei}=0$, 则式(4a)表示为
$ \begin{eqnarray} \left\{\begin{aligned} &\dot{x}_{ei} = \sqrt{ u_{\tau i}^2+v_i^2 } \cos{\theta_{di}}- u_{\scriptscriptstyle L} + \\ &~~~~~~~~~ r_{\scriptscriptstyle L} \left( y_{ei}+y_{di} \right) \\ &\dot{y}_{ei} = U_i \sin{\theta_{di}} -r_{\scriptscriptstyle L} \left( x_{ei} + x_{di} \right) \end{aligned}\right. \end{eqnarray} $
(5) 若$r_{ei}=0$, 则式(4b)表示为
$ \begin{eqnarray} \dot{\theta}_{ei} = r_{\tau i} + \dot{\beta}_{i} - r_{\scriptscriptstyle L} - \dot{\theta}_{di} \end{eqnarray} $
(6) 那么, 可将系统(4)的镇定控制问题转化为三个子系统(5)、(6)和(4c)的镇定控制问题.
令向量${\pmb z}_{1i} \!=\! {\left[{u_{ei}} ~ {r_{ei}} \right]}^{\rm{T}}$, ${\pmb z}_{2i} \!=\! {{\theta }_{ei}}$, ${\pmb z}_{3i} \!=\! {\left[{x_{ei}} ~ {y_{ei}} \right]}^{\rm{T}}$, 函数
$ \begin{eqnarray*} \begin{aligned} & {\pmb f}_{1i}\left( {\pmb z}_{1i}, t \right) = \left[ \begin{aligned} {\left( m_i-X_{\dot{u}i} \right)}^{-1} {\left( X_i+ X_{\tau i} \right)-\dot{u}_{\tau i}} \\ m_{21i} Y_i+m_{22i}\left( N_i+N_{\tau i} \right)-\dot{r}_{\tau i} \end{aligned} \right] \\ & {\pmb f}_{2i}\left( {\pmb z}_{1i}, {\pmb z}_{2i}, t \right) = r_{\tau i}+r_{ei} + \dot{\beta}_{i} - r_{\scriptscriptstyle L} - \dot{\theta}_{di} \\ & {\pmb f}_{3i}\left( {\pmb z}_{1i}, {\pmb z}_{2i}, {\pmb z}_{3i}, t \right) = \\ & \!\! \left[ \begin{aligned} & \!\! \sqrt{{\left( u_{\tau i} \!+\! u_{ei} \right)}^2 \!\!+\! v_i^2} \cos\left( {\theta_{di} \!+\! \theta_{ei}}\right) \!-\! u_{\scriptscriptstyle L} \!\!+\! r_{\scriptscriptstyle L} \! \left( y_{ei} \!+\! y_{di} \right) \\ & U_i \sin\left( \theta_{di} + \theta_{ei} \right) - v_{\scriptscriptstyle L} - r_{\scriptscriptstyle L} \left( x_{ei} + x_{di} \right) \end{aligned} \right] \end{aligned} \end{eqnarray*} $
定理1. 若系统(4)满足假设1和2, 且控制器$u_{\tau i}$, $r_{\tau i}$, $X_{\tau i}$, $N_{\tau i}$满足以下条件
1) 控制器$u_{\tau i}=u_{\tau i}\left( x_{ei}, y_{ei} \right)$使得子系统(5)在零平衡点处是指数稳定的;
2) 控制器$r_{\tau i}=r_{\tau i}\left( \theta_{ei} \right)$使得子系统(6)在零平衡点处是指数稳定的;
3) 控制器$X_{\tau i}=X_{\tau i}\left( u_{ei} \right)$和$N_{\tau i}=N_{\tau i}\left( r_{ei} \right)$使得子系统(4c)在零平衡点处是指数稳定的;
4) ${\pmb f}_{1i} \left( {\pmb z}_{1i}, t \right), {\pmb f}_{2i} \left( {\pmb z}_{1i}, {\pmb z}_{2i}, t \right), {\pmb f}_{3i} \left( {\pmb z}_{1i}, {\pmb z}_{2i}, {\pmb z}_{3i}, t \right)$对于${{\left[{{\pmb z}_{1i}}^{\rm{T}} ~~ {{\pmb z}_{2i}}^{\rm{T}} ~~ {{\pmb z}_{3i}}^{\rm{T}} \right]}^{\rm{T}}}$满足局部Lipschitz连续性条件;
则系统(4)在零平衡点处是指数稳定的.
证明. 对于系统(4c)~(6), 由条件1)~4), 根据Lyapunov逆定理, 则存在Lyapunov函数${{V}_{1i}}\left( {{\pmb z}_{1i}} \right)$, ${{V}_{2i}}\left( {{\pmb z}_{2i}} \right)$, ${{V}_{3i}}\left( {{\pmb z}_{3i}} \right)$满足
$ \begin{eqnarray*} \begin{aligned} & {{c}_{12i}}{{\left\| {{\pmb z}_{1i}} \right\|}^{2}}\le {{V}_{1i}}\left( {{\pmb z}_{1i}} \right)\le {{c}_{11i}}{{\left\| {{\pmb z}_{1i}} \right\|}^{2}} \\ & {{c}_{22i}}{{\left\| {{\pmb z}_{2i}} \right\|}^{2}}\le {{V}_{2i}}\left( {{\pmb z}_{2i}} \right)\le {{c}_{21i}}{{\left\| {{\pmb z}_{2i}} \right\|}^{2}} \\ & {{c}_{32i}}{{\left\| {{\pmb z}_{3i}} \right\|}^{2}}\le {{V}_{3i}}\left( {{\pmb z}_{3i}} \right)\le {{c}_{31i}}{{\left\| {{\pmb z}_{3i}} \right\|}^{2}} \\ & \frac{\partial {V_{1i}}}{\partial t}+\frac{\partial {V_{1i}}}{\partial {\pmb z}_{1i}}{\pmb f}_{1i}\left( {\pmb z}_{1i}, t \right)\le -{c_{13i}}{{\left\| {\pmb z}_{1i} \right\|}^{2}} \\ & \frac{\partial {V_{2i}}}{\partial t}+\frac{\partial {V_{2i}}}{\partial {\pmb z}_{2i}}{\pmb f}_{2i}\left( 0, {\pmb z}_{2i}, t \right)\le -{c_{23i}}{{\left\| {\pmb z}_{2i} \right\|}^{2}} \\ & \frac{\partial {V_{3i}}}{\partial t}+\frac{\partial {V_{3i}}}{\partial {\pmb z}_{3i}}{\pmb f}_{3i}\left( 0, 0, {\pmb z}_{3i}, t \right)\le -{c_{33i}}{{\left\| {\pmb z}_{3i} \right\|}^{2}} \\ & \left\| \frac{\partial {{V}_{1i}}}{\partial {{\pmb z}_{1i}}} \right\|\le {{c}_{14i}}\left\| {{\pmb z}_{1i}} \right\| \\ & \left\| \frac{\partial {{V}_{2i}}}{\partial {{\pmb z}_{2i}}} \right\|\le {{c}_{24i}}\left\| {{\pmb z}_{2i}} \right\| \\ & \left\| \frac{\partial {{V}_{3i}}}{\partial {{\pmb z}_{3i}}} \right\|\le {{c}_{34i}}\left\| {{\pmb z}_{3i}} \right\| \\ \end{aligned} \end{eqnarray*} $
其中, 常数${{c}_{11i}}>0$, ${{c}_{12i}}>0$, ${{c}_{13i}}>0$, ${{c}_{14i}}>0$, ${{c}_{21i}}>0$, ${{c}_{22i}}>0$, ${{c}_{23i}}>0$, ${{c}_{24i}}>0$, ${{c}_{31i}}>0$, ${{c}_{32i}}>0$, ${{c}_{33i}}>0$, ${{c}_{34i}}>0$.
对于系统(4), 取Lyapunov函数为
$ \begin{eqnarray*} \begin{aligned} {{V}_{4i}}={{\lambda }_{1i}}{{V}_{1i}}+{{\lambda }_{2i}}{{V}_{2i}}+{{\lambda }_{3i}}{{V}_{3i}} \end{aligned} \end{eqnarray*} $
其中, 常数${{\lambda }_{1i}}>0$, ${{\lambda }_{2i}}>0$, ${{\lambda }_{3i}}>0$.
则
$ \begin{align*} {{{\dot{V}}}_{4i}}=\, &{{\lambda }_{1i}}\left( \frac{\partial {{V}_{1i}}}{\partial t}+\frac{\partial {{V}_{1i}}}{\partial {{\pmb z}_{1i}}} {{\pmb f}_{1i}}\left( {{\pmb z}_{1i}}, t \right) \right) + \\ & {{\lambda }_{2i}}\left( \frac{\partial {{V}_{2i}}}{\partial t}+\frac{\partial {{V}_{2i}}}{\partial {{\pmb z}_{2i}}} {{\pmb f}_{2i}}\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, t \right) \right) + \\ & {{\lambda }_{3i}}\left( \frac{\partial {{V}_{3i}}}{\partial t}+\frac{\partial {{V}_{3i}}}{\partial {{\pmb z}_{3i}}} {{\pmb f}_{3i}}\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, {{\pmb z}_{3i}}, t \right) \right) = \\ & {{\lambda }_{1i}}\left( \frac{\partial {{V}_{1i}}}{\partial t}+\frac{\partial {{V}_{1i}}}{\partial {{\pmb z}_{1i}}} {{\pmb f}_{1i}}\left( {{\pmb z}_{1i}}, t \right) \right) + \\ & {{\lambda }_{2i}}\left( \frac{\partial {{V}_{2i}}}{\partial t}+\frac{\partial {{V}_{2i}}}{\partial {{\pmb z}_{2i}}} {{\pmb f}_{2i}}\left( 0, {{\pmb z}_{2i}}, t \right) \right) + \\ & {{\lambda }_{2i}}\frac{\partial {{V}_{2i}}}{\partial {{\pmb z}_{2i}}}\left( {{\pmb f}_{2i}}\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, t \right)-{{\pmb f}_{2i}}\left( 0, {{\pmb z}_{2i}}, t \right) \right) + \\ & {{\lambda }_{3i}}\left( \frac{\partial {{V}_{3i}}}{\partial t}+\frac{\partial {{V}_{3i}}}{\partial {{\pmb z}_{3i}}} {{\pmb f}_{3i}}\left( 0, 0, {{\pmb z}_{3i}}, t \right) \right) + \\ & {{\lambda }_{3i}}\frac{\partial {{V}_{3i}}}{\partial {{\pmb z}_{3i}}} \left( {{\pmb f}_{3i}} \!\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, {{\pmb z}_{3i}}, t \right) \!-\! {{\pmb f}_{3i}} \!\left( 0, 0, {{\pmb z}_{3i}}, t \right) \right) \le \\ & -{{\lambda }_{1i}}{{c}_{13i}}{{\left\| {{\pmb z}_{1i}} \right\|}^{2}} \!-\! {{\lambda }_{2i}}{{c}_{23i}}{{\left\| {{\pmb z}_{2i}} \right\|}^{2}} \!-\! {{\lambda }_{3i}}{{c}_{33i}}{{\left\| {{\pmb z}_{3i}} \right\|}^{2}} +\\ & {{\lambda }_{2i}}\left\| \frac{\partial {{V}_{2i}}}{\partial {{\pmb z}_{2i}}} \right\|\left\| {{\pmb f}_{2i}}\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, t \right)-{{\pmb f}_{2i}}\left( 0, {{\pmb z}_{2i}}, t \right) \right\| +\\ & {{\lambda }_{3i}} \!\left\| \frac{\partial {{V}_{3i}}}{\partial {{\pmb z}_{3i}}} \right\| \!\left\| {\pmb f}_{3i} \!\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, {{\pmb z}_{3i}}, t \right) \!-\! {{\pmb f}_{3i}} \!\left( 0, 0, {{\pmb z}_{3i}}, t \right) \right\| \end{align*} $
根据Lipschitz连续性条件, 则存在常数${{\varepsilon }_{1i}}>0$, ${{\varepsilon }_{2i}}>0$, ${{\varepsilon }_{3i}}>0$, 满足
$ \begin{eqnarray*} \begin{aligned} & \left\| {{\pmb f}_{2i}}\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, t \right)-{{\pmb f}_{2i}}\left( 0, {{\pmb z}_{2i}}, t \right) \right\|\le {{\varepsilon }_{1i}}\left\| {{\pmb z}_{1i}} \right\| \\ & \left\| {{\pmb f}_{3i}}\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, {{\pmb z}_{3i}}, t \right)-{{\pmb f}_{3i}}\left( 0, 0, {{\pmb z}_{3i}}, t \right) \right\| \le \\ & ~~~~~~ \left\| {{\pmb f}_{3i}}\left( {{\pmb z}_{1i}}, {{\pmb z}_{2i}}, {{\pmb z}_{3i}}, t \right)-{{\pmb f}_{3i}}\left( 0, {{\pmb z}_{2i}}, {{\pmb z}_{3i}}, t \right) \right\| + \\ & ~~~~~~ \left\| {{\pmb f}_{3i}}\left( 0, {{\pmb z}_{2i}}, {{\pmb z}_{3i}}, t \right)-{{\pmb f}_{3i}}\left( 0, 0, {{\pmb z}_{3i}}, t \right) \right\| \le \\ & ~~~~~~ {{\varepsilon }_{2i}}\left\| {{\pmb z}_{1i}} \right\|+{{\varepsilon }_{3i}}\left\| {{\pmb z}_{2i}} \right\| \\ \end{aligned} \end{eqnarray*} $
由上式可得
$ \begin{eqnarray*} \begin{aligned} & {{{\dot{V}}}_{4i}} \le -{{\lambda }_{1i}}{{c}_{13i}}{{\left\| {{\pmb z}_{1i}} \right\|}^{2}} \!- {{\lambda }_{2i}}{{c}_{23i}}{{\left\| {{\pmb z}_{2i}} \right\|}^{2}} \!-{{\lambda }_{3i}}{{c}_{33i}}{{\left\| {{\pmb z}_{3i}} \right\|}^{2}} + \\ & ~~~~~~ {{\lambda }_{2i}}{{c}_{24i}}{{\varepsilon }_{1i}}\left\| {{\pmb z}_{1i}} \right\|\left\| {{\pmb z}_{2i}} \right\|+{{\lambda }_{3i}}{{c}_{34i}}{{\varepsilon }_{2i}}\left\| {{\pmb z}_{3i}} \right\|\left\| {{\pmb z}_{1i}} \right\| + \\ & ~~~~~~ {{\lambda }_{3i}}{{c}_{34i}}{{\varepsilon }_{3i}}\left\| {{\pmb z}_{3i}} \right\|\left\| {{\pmb z}_{2i}} \right\| \end{aligned} \end{eqnarray*} $
显然, 存在${{\lambda }_{1i}}>0$, ${{\lambda }_{2i}}>0$, ${{\lambda }_{3i}}>0$, ${{\tilde{c}}_{13i}}>0$, ${{\tilde{c}}_{23i}}>0$, ${{\tilde{c}}_{33i}}>0$使得
$ \begin{eqnarray*} \begin{aligned} {{\dot{V}}_{4i}}\le -{{\tilde{c}}_{13i}}{{\left\| {{\pmb z}_{1i}} \right\|}^{2}}-{{\tilde{c}}_{23i}}{{\left\| {{\pmb z}_{2i}} \right\|}^{2}}-{{\tilde{c}}_{33i}}{{\left\| {{\pmb z}_{3i}} \right\|}^{2}} \end{aligned} \end{eqnarray*} $
综上所述, 根据Lyapunov稳定性理论, 系统(4)在零平衡点处是指数稳定的.
由定理1, 船舶编队控制器设计可分成以下三步:
1) 跟随船艏摇角速度虚拟控制器设计
令跟随船$i$艏摇角速度虚拟控制输入为
$ \begin{eqnarray} \begin{aligned} & r_{\tau i} = r'_{\tau i} + r''_{\tau i} + r'''_{\tau i} \end{aligned} \end{eqnarray} $
(7) $ \begin{eqnarray*} \left\{\begin{aligned} & r'_{\tau i} = -\dot{\beta}_i + \dot{\theta}_{di} \\ & r''_{\tau i} = r_{\scriptscriptstyle L} \\ & r'''_{\tau i} = k_{ri} \tanh \left( k_{\theta ei} \theta_{ei} \right) \hspace{0.2cm} \end{aligned}\right. \end{eqnarray*} $
其中, $k_{ri}<0$和$k_{\theta ei}>0$为可调参数.
引理1. 若跟随船$i$艏摇角速度虚拟控制输入取式(7), 则子系统(6)在零平衡点处是指数稳定的.
证明. 取Lyapunov函数为$V_{2i}=\frac{1}{2}\theta_{ei}^2$.
由式(7)可得
$ \begin{eqnarray*} \begin{aligned} {{\dot{V}}_{2i}}={{\dot{\theta }}_{ei}}{{\theta }_{ei}}={{k}_{ri}}{{\theta }_{ei}}\tanh \left( {{k}_{\theta ei}}{{\theta }_{ei}} \right) \end{aligned} \end{eqnarray*} $
若${{\theta }_{ei}}$有界, 则存在常数${{\tilde{k}}_{\theta ei}}>0$使得
$ \begin{eqnarray*} \begin{aligned} \left| \tanh \left( {{k}_{\theta ei}}{{\theta }_{ei}} \right) \right| \ge \left| {{{\tilde{k}}}_{\theta ei}}{{\theta }_{ei}} \right| \end{aligned} \end{eqnarray*} $
由于${{k}_{ri}}<0$, 则
$ \begin{eqnarray*} \begin{aligned} {{\dot{V}}_{2i}}={{k}_{ri}}\left| {{\theta }_{ei}} \right|\left| \tanh \left( {{k}_{\theta ei}}{{\theta }_{ei}} \right) \right| \le {{k}_{ri}}{{\tilde{k}}_{\theta ei}}\theta _{ei}^{2} \end{aligned} \end{eqnarray*} $
根据Lyapunov稳定性理论, 子系统(6)在零平衡点处是指数稳定的.
注3. 式(7)中并未含有距离或角度状态量的相乘项或相除项.当状态量过小时, 相除项会导致$r_{\tau i}$过大; 当状态量过大时, 相乘项会导致$r_{\tau i}$过大.
2) 跟随船纵向速度虚拟控制器设计
令跟随船$i$纵向速度虚拟控制输入为
$ \begin{eqnarray} \begin{aligned} u_{\tau i}= \sqrt{{u'_{\tau i}}^2-v_i^2} \end{aligned} \end{eqnarray} $
(8) $ \begin{eqnarray*} \begin{aligned} u'_{\tau i} = \frac{{u_{\scriptscriptstyle L}}+{k_{ui}}\tanh \left( {k_{xei}}{x_{ei}} \right)-{r_{\scriptscriptstyle L}}{y_{di}}}{\cos {{\theta }_{di}}} \end{aligned} \end{eqnarray*} $
其中, $k_{xei}>0$和$\left| {v_i} \right|-\left( {u_{\scriptscriptstyle L}}-{r_{\scriptscriptstyle L}}{y_{di}} \right)<{k_{ui}}<0$为可调参数.
引理2. 若跟随船$i$纵向速度虚拟控制输入取式(8), 则子系统(5)在零平衡点处是指数稳定的.
证明. 取Lyapunov函数为$V_{3i}=\frac{1}{2}\left( x_{ei}^{2}+y_{ei}^{2} \right)$.
由式(8)可得
$ \begin{eqnarray*} \begin{aligned} \dot{V}_{3i} & = {x_{ei}}{{\dot{x}}_{ei}} + {y_{ei}}{{\dot{y}}_{ei}} = \\ & {k_{ui}}{x_{ei}}\tanh \left( {k_{xi}}{x_{ei}} \right)-{y_{ei}}{r_{\scriptscriptstyle L}}{x_{di}}+{U_i}{y_{ei}}\sin {{\theta}_{di}} = \\ & {k_{ui}}{x_{ei}}\tanh \left( {k_{xi}}{x_{ei}} \right)-{y_{ei}}{r_{{\scriptscriptstyle L}}}{x_{di}} + \\ & {U_i}{y_{ei}}\left( \sin {{\theta'}_{di}}\cos {\theta''_{di}}+\cos {\theta'_{di}}\sin {\theta''_{di}} \right) = \\ & {k_{ui}}{x_{ei}}\tanh \left( {k_{xi}}{x_{ei}} \right)+{U_i}{y_{ei}}\sin {\theta'_{di}}\cos {\theta''_{di}} = \\ & {k_{ui}}{x_{ei}}\tanh \left( {k_{xi}}{x_{ei}} \right)- \\ & {U_i}{y_{ei}}\sin \left( {{\alpha}_{i}}\tanh \left( {k_{yei}}{y_{ei}} \right) \right)\cos {\theta''_{di}} \end{aligned} \end{eqnarray*} $
若${{x}_{ei}}$和${{y}_{ei}}$有界, 则存在常数${{\tilde{k}}_{xei}}>0$和${{\tilde{k}}_{yei}}>0$使得
$ \begin{eqnarray*} \begin{aligned} & \left| \tanh \left( {{k}_{xei}}{{x}_{ei}} \right) \right|\ge \left| {{{\tilde{k}}}_{xei}}{{x}_{ei}} \right| \\ & \left| \sin \left( {{\alpha }_{i}}\tanh \left( {{k}_{yei}}{{y}_{ei}} \right) \right) \right|\ge \left| {{{\tilde{k}}}_{yei}}{{y}_{ei}} \right| \end{aligned} \end{eqnarray*} $
由于${{k}_{ui}}<0$和${{U}_{i}}>0$, 则
$ \begin{eqnarray*} \begin{aligned} {{\dot{V}}_{3i}}\le {{k}_{ui}}{{\tilde{k}}_{xei}}x_{ei}^{2}-{U_i}\cos {\theta''_{di}}{{\tilde{k}}_{yei}}y_{ei}^{2} \end{aligned} \end{eqnarray*} $
由于${U_i}\cos {\theta''_{di}}>0$, 根据Lyapunov稳定性理论, 子系统(5)在零平衡点处是指数稳定的.
3) 跟随船动力学控制器设计
令跟随船$i$纵向控制力为
$ \begin{eqnarray} \begin{aligned} & X_{\tau i}=X'_{\tau i}+X''_{\tau i}+\left( {m_i}-{X_{\dot{u}i}} \right){X'''_{\tau i}} \end{aligned} \end{eqnarray} $
(9) $ \begin{eqnarray*} \left\{\begin{aligned} & X'_{\tau i} = \left( {m_i}-{X_{\dot{u}i}} \right){{\dot{u}}_{\tau i}} \hspace{2.85cm} \\ & X''_{\tau i} = -X_i \\ & X'''_{\tau i} = k_{{\scriptscriptstyle X}i}\tanh \left( {k_{uei}}{u_{ei}} \right) \end{aligned}\right. \end{eqnarray*} $
其中, $k_{{\scriptscriptstyle X}i}<0$和$k_{uei}>0$为可调参数.
令跟随船$i$艏摇控制力矩为
$ \begin{eqnarray} \begin{aligned} N_{\tau i} = N'_{\tau i}+N''_{\tau i}+ {m_{22i}^{-1}} {N'''_{\tau i}} \end{aligned} \end{eqnarray} $
(10) $ \begin{eqnarray*} \left\{\begin{aligned} & N'_{\tau i} = {m_{22i}^{-1}}{{{\dot{r}}}_{\tau i}} \\ & N''_{\tau i} = -{m_{22i}^{-1}}\left( {m_{21i}}{Y_i}+{m_{22i}}{N_i} \right) \\ & N'''_{\tau i} = k_{{\scriptscriptstyle N}i}\tanh \left( {k_{rei}}{r_{ei}} \right) \end{aligned}\right. \end{eqnarray*} $
其中, $k_{{\scriptscriptstyle N}i}<0$和$k_{rei}>0$为可调参数.
引理3. 若跟随船$i$纵向控制力和艏摇控制力矩分别取式(9)和(10), 则子系统(4c)在零平衡点处是指数稳定的.
证明. 取Lyapunov函数为$V_{1i}=\frac{1}{2}\left( u_{ei}^{2}+r_{ei}^{2} \right)$.
由式(9)和(10)可得
$ \begin{eqnarray*} \begin{aligned} \dot{V}_{1i} = u_{ei} {\dot{u}_{ei}} + r_{ei}{\dot{r}_{ei}} = u_{ei} {X'''_{\tau i}}+ r_{ei}{N'''_{\tau i}} \end{aligned} \end{eqnarray*} $
由于${{u}_{ei}}$和${{r}_{ei}}$有界, 则存在常数${{\tilde{k}}_{uei}}>0$和${{\tilde{k}}_{rei}}>0$使得
$ \begin{eqnarray*} \begin{aligned} \left| \tanh \left( {{k}_{uei}}{{u}_{ei}} \right) \right|\ge \left| {{{\tilde{k}}}_{uei}}{{u}_{ei}} \right| \\ \left| \tanh \left( {{k}_{rei}}{{r}_{ei}} \right) \right|\ge \left| {{{\tilde{k}}}_{rei}}{{r}_{ei}} \right| \end{aligned} \end{eqnarray*} $
由于${{k}_{Xi}}<0$和${{k}_{Ni}}<0$, 则
$ \begin{eqnarray*} \begin{aligned} {{\dot{V}}_{1i}}\le {{k}_{Xi}}{{\tilde{k}}_{uei}}u_{ei}^{2}+{{k}_{Ni}}{{\tilde{k}}_{rei}}r_{ei}^{2} \end{aligned} \end{eqnarray*} $
根据Lyapunov稳定性理论, 子系统(4c)在零平衡点处是指数稳定的.
由于跟随船速度$u_i$、$v_i$和$r_i$有界, 则$X''_{\tau i}$和$N''_{\tau i}$有界.又根据双曲正切函数tanh的特性可知, 控制输入$X_{\tau i}$和$N_{\tau i}$有界.可由控制器的饱和值, $X'_{\tau i}+X''_{\tau i}$和$N'_{\tau i}+N''_{\tau i}$的边界值来计算参数$k_{{\scriptscriptstyle X}i}$和$k_{{\scriptscriptstyle N}i}$的值.
显然, 若跟随船$i$的艏摇角速度虚拟控制输入、纵向速度虚拟控制输入、纵向控制力和艏摇控制力矩分别取式(7)~(10)时, 系统(4)~(6)满足局部Lipschitz连续性条件.由定理1和引理1~3, 即得以下结果:
定理2. 若系统(4)满足假设1和2, 跟随船$i$艏摇角速度虚拟控制输入、纵向速度虚拟控制输入、纵向控制力和艏摇控制力矩分别取式(7)~(10), 则系统(4)在零平衡点处是指数稳定的.
3. 基于干扰观测器的补偿控制
考虑跟随船$i$动力学建模导致的不确定性和风、浪、流引起的环境外扰, 其在三个自由度的分量分别为$X'_{\Delta i}$、$Y'_{\Delta i}$和$N'_{\Delta i}$.
跟随船$i$艏摇角速度虚拟控制输入式(7)中含有微分$\dot{\beta}_i$和$\dot{\theta}_{di}$, 纵向控制力式(9)中含有微分$\dot{u}_{\tau i}$, 艏摇控制力矩式(10)中含有微分$\dot{r}_{\tau i}$.而且, 微分$\dot{u}_{\tau i}$和$\dot{r}_{\tau i}$中含有虚拟领航船的加速度.为了避免微分的计算以及跟随船$i$无法获取虚拟领航船的加速度, 在式(4b)中, 将${r_{\Delta i}}={{\dot{\beta }}_i}-{{\dot{\theta }}_{di}}$视为未知干扰, 在式(4c)中, 增加扰动$X'_{\Delta i}$、$Y'_{\Delta i}$和$N'_{\Delta i}$, 并将${X_{\Delta i}}={X'_{\Delta i}}-\left( m_i-X_{\dot{u}i} \right){\dot{u}_{\tau i}}$和$N_{\Delta i}={N'_{\Delta i}}+{m_{22i}^{-1}}{m_{21i}}{Y'_{\Delta i}}-{m_{22i}^{-1}} {{\dot{\tilde{r}}}_{\tau i}}$视为未知干扰.则系统(4)改写为
$ \begin{eqnarray} \left\{\begin{aligned} &\dot{x}_{ei} = \sqrt{{\left( u_{\tau i}+u_{ei} \right)}^2+{v_i}^2} \cos\left( {\theta_{di}+\theta_{ei}}\right) - \\ &~~~~~~~~~ u_{\scriptscriptstyle L}+ r_{\scriptscriptstyle L} \left( y_{ei}+y_{di} \right) \\ &\dot{y}_{ei} = U_i \sin\left( \theta_{di} \!+\! \theta_{ei} \right) \!-\! v_{\scriptscriptstyle L} \!-\! r_{\scriptscriptstyle L} \left( x_{ei} + x_{di} \right) \end{aligned}\right. \end{eqnarray} $
(11a) $ \begin{eqnarray} \dot{\theta}_{ei} = \tilde{r}_{\tau i}+\tilde{r}_{ei} - r_{\scriptscriptstyle L} + r_{\Delta i} \hspace{2.8cm} \end{eqnarray} $
(11b) $ \begin{eqnarray} \left\{\begin{aligned} &\dot{u}_{ei} = {\left( m_i-X_{\dot{u}i} \right)}^{-1} \left( X_i+{\tilde{X}}_{\tau i}+X_{\Delta i} \right) \hspace{0.3cm} \\ &\dot{\tilde{r}}_{ei} = {m_{21i}}{Y_i}+{m_{22i}}\left( N_i+{\tilde{N}}_{\tau i}+N_{\Delta i} \right) \end{aligned}\right. \end{eqnarray} $
(11c) 取干扰观测器为
$ \begin{eqnarray} \left\{\begin{aligned} & {\dot{\xi}_{ri}}=-{{\eta }_{ri}}{r'''_{\tau i}}\\ & {\tilde{r}_{\Delta i}}={{\xi }_{ri}}+{{\eta }_{ri}}{{\theta }_{ei}} \hspace{2.28cm} \end{aligned}\right. \end{eqnarray} $
(12a) $ \begin{eqnarray} \left\{\begin{aligned} & {\dot{\xi}_{Xi}}=-{{\eta }_{{\scriptscriptstyle X}i}}\left( {m_i}-{X_{\dot{u}i}} \right){X'''_{\tau i}}\\ & {\tilde{X}_{\Delta i}}={{\xi }_{{\scriptscriptstyle X}i}}+{{\eta }_{{\scriptscriptstyle X}i}}\left( {{m}_{i}}-{{X}_{\dot{u}i}} \right){{u}_{ei}} \end{aligned}\right. \end{eqnarray} $
(12b) $ \begin{eqnarray} \left\{\begin{aligned} & {\dot{\xi}_{Ni}}=-{{\eta }_{{\scriptscriptstyle N}i}}{{m_{22i}^{-1}}}{\tilde{N}'''_{\tau i}}\\ & {\tilde{N}_{\Delta i}}={{\xi }_{{\scriptscriptstyle N}i}}+{{\eta }_{{\scriptscriptstyle N}i}}{{{m_{22i}^{-1}}}}{{\tilde{r}}_{ei}} \hspace{1.25cm} \end{aligned}\right. \end{eqnarray} $
(12c) 其中, ${{\eta }_{ri}}>0$, ${{\eta }_{{\scriptscriptstyle X}i}}>0$和${{\eta }_{{\scriptscriptstyle N}i}}>0$为可调参数, $\tilde{N}'''_{\tau i}= k_{{\scriptscriptstyle N}i}\tanh \left( {k_{rei}}{{\tilde{r}}_{ei}} \right)$.
跟随船$i$补偿后的艏摇角速度虚拟控制输入、纵向控制力和艏摇控制力矩分别取为
$ {{\tilde{r}}_{\tau i}}={r''_{\tau i}}+{r'''_{\tau i}}-{{\tilde{r}}_{\Delta i}} $
(13) $ {\tilde{X}}_{\tau i}={X''_{\tau i}}+\left( {m_i}-{X_{\dot{u}i}} \right){X'''_{\tau i}}-{{\tilde{X}}_{\Delta i}} $
(14) $ {\tilde{N}_{\tau i}}={N''_{\tau i}}+ {m_{22i}^{-1}} {\tilde{N}'''_{\tau i}}-{\tilde{N}_{\Delta i}} $
(15) 其中, ${r''_{\tau i}}$和${r'''_{\tau i}}$同式(7)表示, $X''_{\tau i}$和$X'''_{\tau i}$同式(9)表示, $N''_{\tau i}$同式(10)表示.
记干扰实际值与估计值的误差为${r_{\Delta ei}}={r_{\Delta i}}-{\tilde{r}_{\Delta i}}$, ${X_{\Delta ei}}={X_{\Delta i}}-{\tilde{X}_{\Delta i}}$, ${N_{\Delta ei}}={r_{\Delta i}}-{\tilde{N}_{\Delta i}}$.则由式(11)~(15)有
$ \begin{eqnarray} \left\{\begin{aligned} & {\dot{r}_{\Delta ei}}=-{{\eta }_{ri}}{r_{\Delta ei}}+{\dot{r}_{\Delta i}} \\ & {\dot{X}_{\Delta ei}}=-{{\eta }_{{\scriptscriptstyle X}i}}{X_{\Delta ei}}+{\dot{X}_{\Delta i}} \\ & {\dot{N}_{\Delta ei}}=-{{\eta }_{{\scriptscriptstyle N}i}}{N_{\Delta ei}}+{\dot{N}_{\Delta i}} \\ \end{aligned}\right. \end{eqnarray} $
(16) 对系统(11)和干扰估计误差系统(16)构成的闭环系统进行稳定性分析, 可得以下结果:
定理3. 若系统(11)满足假设1和2, 跟随船$i$的艏摇角速度虚拟控制输入、纵向速度虚拟控制输入、纵向控制力和艏摇控制力矩分别取式(13)、(8)、(14)和(15), 则存在可调参数${{\eta }_{ri}}>0$、 ${{\eta }_{{\scriptscriptstyle X}i}}>0$和${{\eta }_{{\scriptscriptstyle N}i}}>0$使得系统(11)和干扰估计误差系统(16)构成的闭环系统是最终一致有界的.
证明. 对于干扰估计误差系统(16), 取Lyapu-nov函数分别为${V_{5i}} = \frac{1}{2}{r_{\Delta ei}^2}$、${V_{6i}} = \frac{1}{2}{X_{\Delta ei}^2}$和${V_{7i}} = \frac{1}{2}{N_{\Delta ei}^2}$, 则
$ \begin{eqnarray*} \left\{\begin{aligned} & {{{\dot{V}}}_{5i}} = -{\eta }_{ri} {r_{\Delta ei}^2} + {r_{\Delta ei}}{\dot{r}_{\Delta i}} \\ & {{{\dot{V}}}_{6i}} = -{\eta }_{{\scriptscriptstyle X}i} {X_{\Delta ei}^2} + {X_{\Delta ei}}{\dot{X}_{\Delta i}} \\ & {{{\dot{V}}}_{7i}} = -{\eta }_{{\scriptscriptstyle N}i} {N_{\Delta ei}^2} + {N_{\Delta ei}}{\dot{N}_{\Delta i}} \end{aligned}\right. \end{eqnarray*} $
由上式可得, 存在时间$T_{1i}$, 当$t>T_{1i}$时, 有边界值$b_{1i}> {{\eta }_{ri}^{-1}} \left| {\dot{r}_{\Delta i}} \right|$, $b_{2i}> {{\eta }_{{\scriptscriptstyle X}i}^{-1}} \left| {\dot{X}_{\Delta i}} \right|$, $b_{3i}> {{\eta }_{{\scriptscriptstyle N}i}^{-1}}\left| {\dot{N}_{\Delta i}} \right|$满足$\left| {r_{\Delta ei}} \right| \le b_{1i}$, $\left| {X_{\Delta ei}} \right| \le b_{2i}$, $\left| {N_{\Delta ei}} \right| \le b_{3i}$.可调参数${{\eta }_{ri}}$、${{\eta }_{{\scriptscriptstyle X}i}}$和${{\eta }_{{\scriptscriptstyle N}i}}$越大, 干扰估计误差系统(16)收敛越快, 最终边界值越小.
对于系统(11), 取Lyapunov函数为
$ \begin{eqnarray*} \begin{aligned} {{V}_{8i}}={{\lambda }_{1i}}\left( x_{ei}^{2}+y_{ei}^{2} \right)+{{\lambda }_{2i}}\theta _{ei}^{2}+{{\lambda }_{3i}}\left( u_{ei}^{2}+\tilde{r}_{ei}^{2} \right) \end{aligned} \end{eqnarray*} $
其中, 常数${{\lambda }_{1i}}>0$, ${{\lambda }_{2i}}>0$, ${{\lambda }_{3i}}>0$.
当$t>T_{1i}$时, 沿用定理1的证明思路, 则存在常数${{\tilde{c}}_{13i}}>0$、${{\tilde{c}}_{23i}}>0$和${{\tilde{c}}_{33i}}>0$使得
$ \begin{eqnarray*} \begin{aligned} & {{{\dot{V}}}_{8i}}\le -{{{\tilde{c}}}_{13i}}\left( x_{ei}^{2}+y_{ei}^{2} \right)-{{{\tilde{c}}}_{23i}}\theta _{ei}^{2}-{{{\tilde{c}}}_{33i}}\left( u_{ei}^{2}+\tilde{r}_{ei}^{2} \right) + \\ & ~~~~~~ 2{{\lambda }_{2i}} {b_{1i}} \left| {{\theta }_{ei}} \right| + 2{{\lambda }_{3i}} {b_{2i}} \left| {\left( m_i-X_{\dot{u}i} \right)}^{-1} {{u}_{ei}} \right| + \\ & ~~~~~~ 2{{\lambda }_{3i}} {b_{3i}} \left| {m_{22i}} {{{\tilde{r}}}_{ei}} \right| \\ \end{aligned} \end{eqnarray*} $
由上式可得, 在系统状态的定义域内, 存在边界值$b_{1i}$、$b_{2i}$、$b_{3i}$、$b_{4i}$、$b_{5i}$、$b_{6i}$和$b_{7i}$, 当$\left| {x_{ei}} \right| > b_{4i}$, $\left| {y_{ei}} \right| > b_{5i}$, $\left| {\theta_{ei}} \right| > b_{6i}$, $\left| {r_{ei}} \right| > b_{7i}$时, ${{{\dot{V}}}_{8i}}<0$.即存在可调参数${{\eta }_{ri}}$、${{\eta }_{{\scriptscriptstyle X}i}}$和${{\eta }_{{\scriptscriptstyle N}i}}$, 使得系统(11)和干扰估计误差系统(16)构成的闭环系统是最终一致有界的.并且, 控制器(7)~(10)的增益越高, 闭环系统状态的最终边界值越小.
可取干扰观测器(12)中${{\tilde{r}}_{\Delta i}}$、${{\tilde{X}}_{\Delta i}}$和${{\tilde{N}}_{\Delta i}}$的初值为零, 若${{\dot{r}}_{\Delta i}}\approx 0$, ${{\dot{X}}_{\Delta i}}\approx 0$, ${{\dot{N}}_{\Delta i}}\approx 0$时, 干扰估计误差系统(16)不会超调, 即$\left| {{{\tilde{r}}}_{\Delta i}} \right|\le \left| {{r}_{\Delta i}} \right|$, $\left| {{{\tilde{X}}}_{\Delta i}} \right|\le {{X}_{\Delta i}}$, $\left| {{{\tilde{N}}}_{\Delta i}} \right|\le {{N}_{\Delta i}}$.在干扰有界、${{{X}''}_{\tau i}}$和${{\tilde{{N}''}}_{\tau i}}$有界的情形下, 控制输入仍然是有界的, 可由此来确定控制器参数值.
4. 仿真
对4艘船长为52.5 m的跟随船组成的编队进行仿真.跟随船动力学模型(3b)中的各项参数见文献[20].
设虚拟领航船位置$\left( x_{\scriptscriptstyle L/O}, y_{\scriptscriptstyle L/O}, \psi_{\scriptscriptstyle L} \right)$初值为$\left( 200, 200, {\pi}/{6} \right)$, 纵向速度$u_{\scriptscriptstyle L}$、横荡速度$v_{\scriptscriptstyle L}$和艏摇角速度$r_{\scriptscriptstyle L}$分别为$5\, \rm{m/s}$、$0$和$0.01\sin \left( 0.01t \right)+0.008\sin \left( 0.015t \right)\rm{rad/s}$.
跟随船1~4中, 期望队形参数$\left( x_{di}, y_{di} \right)$分别为$\left( -50, 50 \right)$、$\left( -50, -50 \right)$、$\left( 50, 50 \right)$和$\left( 50, -50 \right)$, 速度$\left( u_i, v_i, r_i \right)$初值均为$\left( 4, 0, 0 \right)$, 位置和航向$\left( x_{i{\scriptscriptstyle /O}}, y_{i{\scriptscriptstyle /O}}, \psi_{i} \right)$初值分别为$\left( 0, 150, 0.05\pi \right)$、 $\left( 300, 100, 0.05\pi \right)$、 $\left( 0, 350, 0.1\pi \right)$和$\left( 400, 300, 0.1\pi \right)$.
设跟随船1~4的纵向控制力和艏摇控制力矩的饱和值分别为$1\times {10^5}~\rm{N}$和$4\times {10^5}~\rm{N}\cdot \rm{m}$.艏摇角速度虚拟控制输入式(7)中的参数$\left( \alpha_i, k_{yei}, k_{ri}, k_{\theta ei} \right)$均取为$(\pi/7, 0.01, -0.01, 10 )$.纵向速度虚拟控制输入式(8)中的参数$\left( {{k}_{ui}}, {{k}_{xei}} \right)$均取为$\left( -0.6, 0.1 \right)$.纵向控制力式(9)中的参数$\left( k_{{\scriptscriptstyle X}i}, k_{uei} \right)$均取为$\left( -0.13, 1 \right)$.艏摇控制力矩式(10)中的参数$\left( k_{{\scriptscriptstyle N}i}, k_{rei} \right)$均取为$\left( -0.0025, 200 \right)$.
设跟随船1~4在纵向、横向和艏摇方向遭受的外扰均为
$ \begin{eqnarray*} \left\{ \begin{aligned} & {X'_{\Delta i}}=-2\times {10^4}\sin \left( 0.04t \right)~\rm{N} \\ & {Y'_{\Delta i}}=-1\times {10^4}\sin \left( 0.05t \right) - 2\times {10^4}~\rm{N} \\ & {N'_{\Delta i}}=-2\times {10^4}\sin \left( 0.06t \right) - 4\times {10^4}~\rm{N} \cdot \rm{m} \end{aligned} \right. \end{eqnarray*} $
若采用干扰观测器的补偿控制, 干扰观测器(12)中的参数$\left( {{\eta }_{ri}}, {{\eta }_{{\scriptscriptstyle X}i}}, {{\eta }_{{\scriptscriptstyle N}i}} \right)$均取为$\left( 0.02, 0.03, 0.2 \right)$.分别对不采用和采用干扰观测器的控制进行仿真.
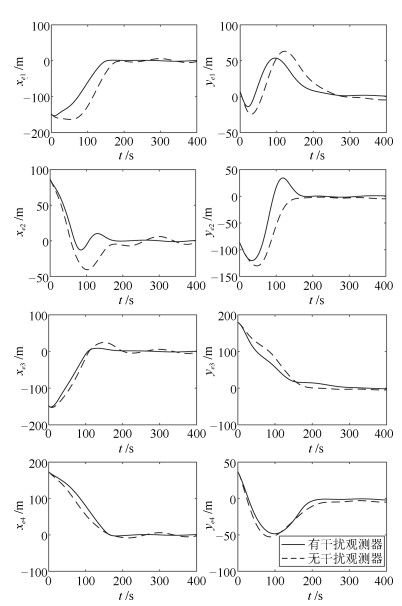
由图 2~图 4可见, 在外扰影响下, 采用干扰观测器时船舶编队控制效果较好, 跟随船的位置偏差实际值与期望值的误差能够收敛到零的较小邻域内, 而无干扰观测器时, 船舶编队队形误差相对较大.因此基于干扰观测器的补偿控制能够有效抑制外扰.
 图 3 无干扰观测器时船舶编队运动轨迹Fig. 3 Motion trajectory of the ship formation no using the disturbance observers
图 3 无干扰观测器时船舶编队运动轨迹Fig. 3 Motion trajectory of the ship formation no using the disturbance observers 图 4 采用干扰观测器时船舶编队运动轨迹Fig. 4 Motion trajectory of the ship formation using the disturbance observers
图 4 采用干扰观测器时船舶编队运动轨迹Fig. 4 Motion trajectory of the ship formation using the disturbance observers由图 5~图 7可见, 跟随船的速度曲线比较平滑, 速度值和控制输入较合理.由于船舶的艏摇运动和横荡运动之间存在耦合关系, 外扰也会引起船舶的横荡运动.图中跟随船的横荡速度不为零, 主要由跟随船横向的外扰和艏摇运动引起.在图 6~图 7中, ${N}_{\tau 1}$和${N}_{\tau 2}$在控制器作用不久后达到饱和值, 这是因为跟随船1和2的状态$\theta_{ei}$初值较大, 可通过减小艏摇角速度虚拟控制输入的增益$k_{ri}$或采用时变增益来避免达到饱和值, 但队形误差的收敛速度将变慢.而${N}_{\tau 2}$和${N}_{\tau 3}$在$t \in (100, 200) $中有一段时间达到饱和值, 主要由于虚拟领航船的艏摇角速度在该时段处于较大值.
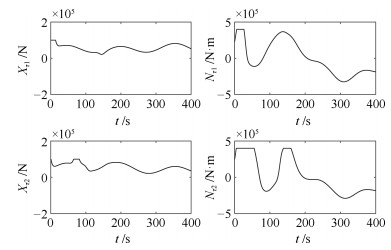 图 6 采用干扰观测器时跟随船1和2的控制输入Fig. 6 Control inputs of the follower 1 and 2 using the disturbance observers
图 6 采用干扰观测器时跟随船1和2的控制输入Fig. 6 Control inputs of the follower 1 and 2 using the disturbance observers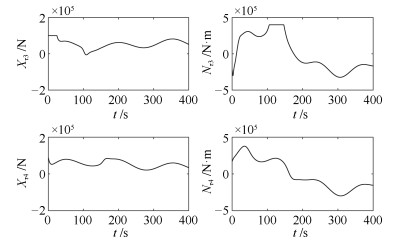 图 7 采用干扰观测器时跟随船3和4的控制输入Fig. 7 Control inputs of the follower 3 and 4 using the disturbance observers
图 7 采用干扰观测器时跟随船3和4的控制输入Fig. 7 Control inputs of the follower 3 and 4 using the disturbance observers5. 结论
本文使用Leader-follower方法, 研究了纵向、横荡和艏摇三个自由度运动的欠驱动船舶编队控制问题.将控制器设计分成三步骤, 每步骤可单独设计, 简化了控制器设计.进一步, 采用干扰观测器估计外扰等未知动态和虚拟控制输入的微分.由于欠驱动船舶未能获得直接横向推进力, 本文对跟随船的横荡速度并不加以直接控制, 而是通过控制跟随船的纵向速度和航向, 使得跟随船与虚拟领航船保持相应的距离.仿真结果表明, 跟随船在输入饱和以及外扰存在的情况下船舶编队队形误差小, 速度值合理.
-
图 1 跟随船i和虚拟领航船的运动示意图
Fig. 1 Motion sketch map of the follower i and the virtual leader
图 3 无干扰观测器时船舶编队运动轨迹
Fig. 3 Motion trajectory of the ship formation no using the disturbance observers
图 4 采用干扰观测器时船舶编队运动轨迹
Fig. 4 Motion trajectory of the ship formation using the disturbance observers
图 6 采用干扰观测器时跟随船1和2的控制输入
Fig. 6 Control inputs of the follower 1 and 2 using the disturbance observers
-
[1] 王祥科, 李迅, 郑志强.多智能体系统编队控制相关问题研究综述.控制与决策, 2013, 28(11):1601-1613 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201311001Wang Xiang-Ke, Li Xun, Zheng Zhi-Qiang. Survey of developments on multi-agent formation control related problems. Control and Decision, 2013, 28(11):1601-1613 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201311001 [2] 徐博, 白金磊, 郝燕玲, 高伟, 刘亚龙.多AUV协同导航问题的研究现状与进展.自动化学报, 2015, 41(3):445-461 http://www.aas.net.cn/CN/abstract/abstract18624.shtmlXu Bo, Bai Jin-Lei, Hao Yan-Ling, Gao Wei, Liu Ya-Long. The research status and progress of cooperative navigation for multiple AUVs. Acta Automatica Sinica, 2015, 41(3):445-461 http://www.aas.net.cn/CN/abstract/abstract18624.shtml [3] 耿志勇.基于庞特里亚金极小值原理的多运载体有限时间编队控制.自动化学报, 2017, 43(1):40-59 http://www.aas.net.cn/CN/abstract/abstract18987.shtmlGeng Zhi-Yong. Finite time formation control for multiple vehicles based on Pontryagin's minimum principle. Acta Automatica Sinica, 2017, 43(1):40-59 http://www.aas.net.cn/CN/abstract/abstract18987.shtml [4] 郭晨, 汪洋, 孙富春, 沈志鹏.欠驱动水面船舶运动控制研究综述.控制与决策, 2009, 24(3):321-329 doi: 10.3321/j.issn:1001-0920.2009.03.001Guo Chen, Wang Yang, Sun Fu-Chun, Shen Zhi-Peng. Survey for motion control of underactuated surface vessels. Control and Decision, 2009, 24(3):321-329 doi: 10.3321/j.issn:1001-0920.2009.03.001 [5] Thorvaldsen C F L, Skjetne R. Formation control of fully-actuated marine vessels using group agreement protocols. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, USA: IEEE, 2011. 4132-4139 [6] Ghommam J, Saad M, Mnif F. Robust adaptive formation control of fully actuated marine vessels using local potential functions. In: Proceedings of the 2010 IEEE International Conference on Robotics and Automation. Anchorage, USA: IEEE, 2010. 3001-3007 [7] Breivik M, Hovstein V E, Fossen T I. Ship formation control: a guided leader-follower approach. In: Proceedings of the 17th IFAC World Congress. Seoul, Southe Korea: IFAC, 2008. 16008-16014 [8] 王昊, 王丹, 彭周华, 孙刚.多自主船协同路径跟踪的自适应动态面控制.控制理论与应用, 2013, 30(5):637-643 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305015Wang Hao, Wang Dan, Peng Zhou-Hua, Sun Gang. Adaptive dynamic surface control for cooperative path following of multiple autonomous surface vessels. Control Theory & Applications, 2013, 30(5):637-643 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305015 [9] 付明玉, 焦建芳.基于虚拟领航者的船舶无源协调编队控制研究.自动化学报, 2014, 40(3):439-448 http://www.aas.net.cn/CN/abstract/abstract18309.shtmlFu Ming-Yu, Jiao Jian-Fang. Passive coordinated formation control for vessels based on virtual leader. Acta Automatica Sinica, 2014, 40(3):439-448 http://www.aas.net.cn/CN/abstract/abstract18309.shtml [10] Yin S, Yang H Y, Kaynak O. Coordination task triggered formation control algorithm for multiple marine vessels. IEEE Transactions on Industrial Electronics, 2017, 64(6):4984-4993 doi: 10.1109/TIE.2016.2574301 [11] Miswanto, Pranoto I, Muhammad H, Mahayana D. The control design of ship formation with the presence of a leader. International Journal of Robotics and Automation, 2015, 4(1):2089-4856 [12] Xiang X B, Lapierre L, Jouvencel B, Parodi O. Coordinated path following control of multiple nonholonomic vehicles. In: Proceedings of Oceans 2009-EUROPE. Bremen, Germany: IEEE, 2009. 1-7 [13] Cui R X, Ge S S, How B V E, Choo Y S. Leader-follower formation control of underactuated autonomous underwater vehicles. Ocean Engineering, 2010, 37(17-18):1491-1502 doi: 10.1016/j.oceaneng.2010.07.006 [14] Peng Z, Wang D, Hu X. Robust Adaptive formation control of underactuated autonomous surface vehicles with uncertain dynamics. IET Control Theory & Applications, 2011, 5(12):1378-1387 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ0222789896 [15] Peng Z H, Wang D, Chen Z Y, Hu X J, Lan W Y. Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics. IEEE Transactions on Control Systems Technology, 2013, 21(2):513-520 doi: 10.1109/TCST.2011.2181513 [16] Peymani E, Fossen T I. Leader-follower formation of marine craft using constraint forces and Lagrange multipliers. In: Proceedings of the 51st IEEE Conference on Decision and Control. Maui, USA: IEEE, 2012. 2447-2452 [17] 李芸, 肖英杰.领航跟随法和势函数组合的船舶编队控制.控制理论与应用, 2016, 33(9):1259-1264 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201609016Li Yun, Xiao Ying-Jie. Combination of leader-follower method and potential function about ship formation control. Control Theory & Applications, 2016, 33(9):1259-1264 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201609016 [18] Chen W H, Yang J, Guo L, Li S H. Disturbance-observer-based control and related methods-an overview. IEEE Transactions on Industrial Electronics, 2016, 63(2):1083-1095 doi: 10.1109/TIE.2015.2478397 [19] Fossen T I. Handbook of Marine Craft Hydrodynamics and Motion Control. West Sussex: John Wiley & Sons, 2011. 133-167 [20] Perez T. Ship Motion Control: Course Keeping and Roll Stabilisation Using Rudder and Fins. London: Springer-Verlag, 2005. 274-282 期刊类型引用(12)
1. 宁君,彭周华,李铁山,陈俊龙. 带有输入量化的分布式多无人船舶自适应模糊编队控制. 控制与决策. 2024(08): 2588-2596 .  百度学术
百度学术2. 宁君,陈汉民,李伟,王启福,李铁山,陈俊龙. 基于扩张状态观测器的有限时间船舶编队控制. 中国舰船研究. 2023(01): 60-66 . 百度学术3. 马俊达,谭冲,刘可. 欠驱动无人船非奇异固定时间鲁棒包容控制. 控制与决策. 2023(05): 1286-1294 . 百度学术4. 王宁,高颖,王仁慧. 状态测量不确定和动力学未知的无人艇固定时间容错控制. 自动化学报. 2023(05): 1050-1061 . 本站查看5. 黄兵,肖云飞,冯元,于秀萍. 无人艇全分布式动态事件触发编队控制. 控制理论与应用. 2023(08): 1479-1487 . 百度学术6. 马俊达,谭冲,范佳佳. 基于齐次系统理论的多船有限时间饱和包容控制. 哈尔滨工程大学学报. 2023(10): 1779-1787 . 百度学术7. 高阳,吴文海,王子健. 具有输入约束和输出噪声的不确定系统级联线性自抗扰控制. 自动化学报. 2022(03): 843-852 . 本站查看8. 柳晨光,贺治卜,初秀民,吴文祥,李松龙,谢朔. 船舶编队控制综述. 交通运输工程学报. 2022(04): 10-27 . 百度学术9. 李莉莉,董凯,郭戈. 纵向速度和艏向角受限的水面艇有限时间协同路径跟踪. 控制与决策. 2021(02): 363-370 . 百度学术10. 张慧凤,董乐伟,魏新江. 一类带有输入饱和的随机系统抗干扰控制. 自动化学报. 2021(06): 1453-1459 . 本站查看11. 檀盼龙,秦华阳,孙明玮,刘俊杰,孙青林,陈增强. 欠驱动RTAC的滑模自抗扰镇定控制. 控制理论与应用. 2021(12): 2085-2093 . 百度学术12. 武宪青,徐可心,张益波. 基于输出反馈的欠驱动TORA系统的有界输入控制. 自动化学报. 2020(01): 200-204 . 本站查看其他类型引用(26)
-

 下载:
下载:

 下载:
下载:
计量
- 文章访问数: 4100
- HTML全文浏览量: 320
- PDF下载量: 619
- 被引次数: 38
