

Motion Planning and Tracking Control of Series Elastic Actuator for Vibration Suppression
-
摘要: 针对串联弹性驱动器(Series elastic actuator,SEA)的位置控制问题,本文提出了一种"规划+控制"的策略.首先根据连杆端运动学约束方程,基于数字滤波器对电机位置进行轨迹规划;为了使电机能够准确跟踪期望轨迹,根据电机端的动力学模型设计位置跟踪控制器.理论分析证明了规划的抖动抑制作用和跟踪控制系统的稳定性,随后的实验结果也表明了这种"规划+控制"方法在使连杆到达期望位置的前提下,能够有效地抑制残余抖动.Abstract: A "Plan + Control" strategy is proposed in this paper for position control of series elastic actuator (SEA). Based on the kinematic constraint of the link side in SEA, the trajectory of motor position is planed using digital filter; while in the motor side, a nonlinear state feedback controller is designed for trajectory tracking. Vibration suppression of the trajectory plan with digital filter is presented, and asymptotic convergence of the tracking controller is analytically proven. Experiment results illustrate the effectiveness of the proposed scheme.1) 本文责任编委 侯增广
-
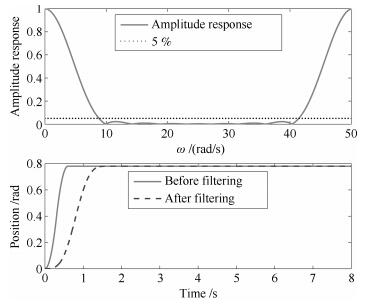
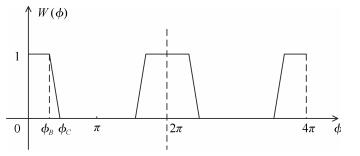
图 7 $W(\phi)$的实际幅频响应和滤波前后轨迹
Fig. 7 Real amplitude response of $ W(\phi) $ and motor trajectory (before and after filtering)
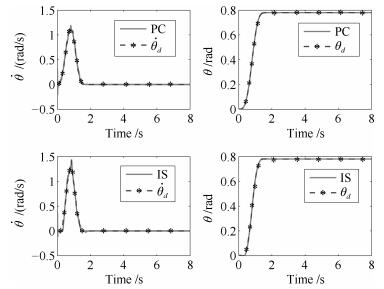
图 10 轨迹跟踪实验结果: $ \dot\theta $和$ \theta $
Fig. 10 Experiment result of trajectory tracking: $ \dot\theta $和$ \theta $
表 1 ZVDD整形器的脉冲幅值及其对应的时间
Table 1 Amplitude and time of input shaper ZVDD
脉冲幅值 时间(s) 0 0 0.3125 0.273 0.5 0.546 0.1875 0.819  下载: 导出CSV
下载: 导出CSV
-
[1] Pratt G A, Williamson M M. Series elastic actuators. In: Proceedings of the 1995 IEEE International Conference on Intelligent Robots and Systems. Pittsburgh, USA: IEEE, 1995. 399-406 [2] Zinn M, Roth B, Khatib O, Kenneth S J. A new actuation approach for human friendly robot design. The International Journal of Robotics Research, 2004, 23(4-5):379-398 doi: 10.1177/0278364904042193 [3] Kong K, Bae J, Tomizuka M. Control of rotary series elastic actuator for ideal force-mode actuation in human-robot interaction applications. IEEE/ASME Transactions on Mechatronics, 2009, 14(1):105-118 http://cn.bing.com/academic/profile?id=3cb1683d70ec4880627e7277026bbc76&encoded=0&v=paper_preview&mkt=zh-cn [4] Sariyildiz E, Chen G, Yu H Y. Robust position control of a novel series elastic actuator via disturbance observer. In: Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015. 5423-5428 http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=7354144 [5] Park C, Kyung J H, Park D I. Development of an industrial robot manipulator for the easy and safe human-robot cooperation. In: Proceedings of the 2010 International Conference on Control Automation and Systems (ICCAS). Gyeonggi-do, South Korea: IEEE, 2010. 678-681 http://ieeexplore.ieee.org/document/5670249/ [6] Tadele S T, de Vries T, Stramigioli S. The safety of domestic robotics:a survey of various safety-related publications. IEEE Robotics & Automation Magazine, 2014, 21(3):134-142 http://cn.bing.com/academic/profile?id=10ccdf6e4b3e8fafcd5723753fbb12ae&encoded=0&v=paper_preview&mkt=zh-cn [7] Sariyildiz E, Ohnishi K. On the explicit robust force control via disturbance observer. IEEE Transactions on Industrial Electronics, 2015, 62(3):1581-1589 doi: 10.1109/TIE.2014.2361611 [8] Vallery H, Veneman J, van Asseldonk E, Ekkelenkamp R, Buss M, van der Kooij H. Compliant actuation of rehabilitation robots. Robotics & Automation Magazine, 2008, 15(3):60-69 http://cn.bing.com/academic/profile?id=00d9e014e5c319bcc3b745be26cbaabe&encoded=0&v=paper_preview&mkt=zh-cn [9] Fujimoto Y, Murakami T, Oboe R. Advanced motion control for next-generation industrial applications. IEEE Transactions on Industrial Electronics, 2016, 63(3):1886-1888 doi: 10.1109/TIE.2016.2515992 [10] Spong M W. Modeling and control of elastic joint robots. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4):310-319 doi: 10.1115/1.3143860 [11] Ghorbel F, Hung J Y, Spong M W. Adaptive control of flexible-joint manipulators. IEEE Control Systems Magazine, 1989, 9(7):9-13 doi: 10.1109/37.41450 [12] Spong M W. Control of flexible joint robots: a survey. Technical Report UILU-ENG-90-2203, DC-116. University of Illinois Manufacturing Research Center, USA, 1990. [13] Oh J H, Lee J S. Control of flexible joint robot system by backstepping design approach. In: Proceedings of the 1997 International Conference on Robotics and Automation. Albuquerque, NM, USA: IEEE, 1997. 3435-3440 doi: 10.1080/10798587.1999.10750607 [14] Tomei P. A simple PD controller for robots with elastic joints. IEEE Transactions on Automatic Control, 1991, 36(10):1208-1213 doi: 10.1109/9.90238 [15] Zollo L, de Luca A, Siciliano B. Regulation with on-line gravity compensation for robots with elastic joints. In: Proceedings of the 2004 International Conference on Robotics and Automation. New Orleans, USA: IEEE, 2004. 2687-2692 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=1307466 [16] de Luca A, Siciliano B, Zollo L. PD control with on-line gravity compensation for robots with elastic joints:theory and experiments. Automatica, 2005, 41(10):1809-1819 doi: 10.1016/j.automatica.2005.05.009 [17] Zollo L, Siciliano B, de Luca A, Guglielmelli E. PD control with on-line gravity compensation for robots with flexible links. In: Proceedings of the 2007 European Control Conference (ECC). Kos, Greece: IEEE, 2007. 4365-4370 http://ieeexplore.ieee.org/document/7068344/ [18] Kim J M, Chung K W. Disturbance-observer-based PD control of flexible joint robots for asymptotic convergence. IEEE Transactions on Robotics, 2015, 31(6):1508-1516 doi: 10.1109/TRO.2015.2477957 [19] Talole S E, Kolhe J P, Phadke S B. Extended-state-observer-based control of flexible-joint system with experimental validation. IEEE Transactions on Industrial Electronics, 2010, 57(4):1411-1419 doi: 10.1109/TIE.2009.2029528 [20] Ginoya D, Shendge P D, Phadke S B. Sliding mode control for mismatched uncertain systems using an extended disturbance observer. IEEE Transactions on Industrial Electronics, 2014, 61(4):1983-1992 doi: 10.1109/TIE.2013.2271597 [21] Ginoya D, Shendge P D, Phadke S B. Delta-operator-based extended disturbance observer and its applications. IEEE Transactions on Industrial Electronics, 2015, 62(9):5817-5828 doi: 10.1109/TIE.2015.2450715 [22] Petit F, Ott C, Albu-Schäffer A. A model-free approach to vibration suppression for intrinsically elastic robots. In: Proceedings of the 2014 International Conference on Robotics and Automation(ICRA). Hong Kong, China: IEEE, 2014. 2176-2182 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6907159 [23] Kostarigka A K, Doulgeri Z, Rovithakis G A. Prescribed performance tracking for flexible joint robots with unknown dynamics and variable elasticity. Automatica, 2013, 49(5):1137-1147 doi: 10.1016/j.automatica.2013.01.042 [24] Le-Tien L, Albu-Schäffer A. Improving tracking accuracy of a MIMO state feedback controller for elastic joint robots. In: Proceedings of the 53rd Annual Conference on Decision and Control. Los Angeles, CA, USA: IEEE, 2014. 4548-4553 http://ieeexplore.ieee.org/document/7040099/ [25] Lightcap C A, Banks S A. An extended Kalman filter for real-time estimation and control of a rigid-link flexible-joint manipulator. IEEE Transactions on Control Systems Technology, 2010, 18(1):91-103 doi: 10.1109/TCST.2009.2014959 [26] 彭济根, 倪元华, 乔红.柔性关节机操手的神经网络控制.自动化学报, 2007, 33(2):175-180 http://www.aas.net.cn/CN/abstract/abstract13826.shtmlPeng Ji-Gen, Ni Yuan-Hua, Qiao Hong. Neural network control of flexile-joint robot manipulators. Acta Automatica Sinica, 2007, 33(2):175-180 http://www.aas.net.cn/CN/abstract/abstract13826.shtml [27] Huey J R, Singhose W. Design of proportional-derivative feedback and input shaping for control of inertia plants. IET Control Theory & Applications, 2012, 6(3):357-364 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ0225634580 [28] Sun N, Fang Y C, Zhang X B, Yuan Y H. Phase plane analysis based motion planning for underactuated overhead cranes. In: Proceedings of the 2011 International Conference on Robotics and Automation (ICRA). Shanghai, China: IEEE, 2011. 3483-3488 http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=5979526 [29] Economou D, Lee C, Mavroidis C, Antoniadis I. Experimental demonstration of input preconditioning for residual vibration suppression using low-pass fir digital filters. In: Proceedings of the American Control Conference. Arlington, VA, USA: IEEE, 2011. 1581-1586 [30] Antoniadis I. Guidance preconditioning by an impulse sequence for robust residual vibration suppression. Shock and Vibration, 1999, 6(3):133-145 doi: 10.1155/1999/250173 [31] Albu-Schäffer A, Ott C, Petit F. Energy shaping control for a class of underactuated euler-lagrange systems. IFAC Proceedings Volumes, 2012, 45(22):567-575 doi: 10.3182/20120905-3-HR-2030.00132 [32] Xian B, Dawson M D, de Queiroz M S, Chen J. A continuous asymptotic tracking control strategy for uncertain nonlinear systems. IEEE Transactions on Automatic Control, 2004, 49(7):1206-1211 doi: 10.1109/TAC.2004.831148 [33] Khalil K H. Nonlinear Systems (Third Edition). New Jersey: Prentice-Hall, 1996. -

 下载:
下载:




图(11) / 表(1)
计量
- 文章访问数: 2897
- HTML全文浏览量: 390
- PDF下载量: 619
- 被引次数: 0
