

-
摘要: 研究了具有输入饱和且存在横荡运动的欠驱动船舶在水面上运动的编队控制问题.使用Leader-follower方法,将编队控制问题转化为镇定控制问题.给出了不同于Backstepping方法的编队控制器设计三步法,该方法有助于克服输入饱和的影响,并分析了闭环系统的稳定性.进一步,将跟随船控制输入中的微分、虚拟领航船的加速度、跟随船动力学模型的不确定性和外扰统一视为干扰,应用干扰观测器估计并在控制器中给予补偿.仿真结果表明了方法的有效性.Abstract: This paper addresses the control problem of underactuated ship formation sailing on ocean with input saturation and sway motion. By means of the leader-follower method, the problem is converted into a stablization problem. A three-step formation control design method is given, which is different from the backstepping method and can help overcome the influence of input saturation. Then, the stability of the closed-loop system is analyzed. Moreover, the differential of the controllers of the followers, the acceleration of the virtual leader, and the uncertainties and external disturbances in the dynamics models of the followers are all viewed as disturbances. These disturbances are estimated by using the disturbance observers and thus the controllers are compensated. Simulation is presented to illustrate the effectiveness of the method.
-
Key words:
- Ship formation control /
- underactuated /
- input saturation /
- nonlinear control
1) 本文责任编委 李平 -
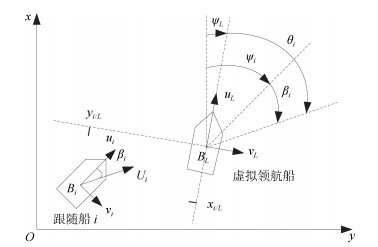
图 1 跟随船i和虚拟领航船的运动示意图
Fig. 1 Motion sketch map of the follower i and the virtual leader

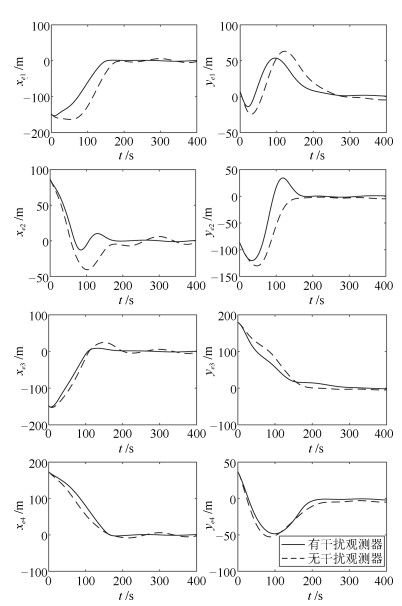
图 3 无干扰观测器时船舶编队运动轨迹
Fig. 3 Motion trajectory of the ship formation no using the disturbance observers

图 4 采用干扰观测器时船舶编队运动轨迹
Fig. 4 Motion trajectory of the ship formation using the disturbance observers
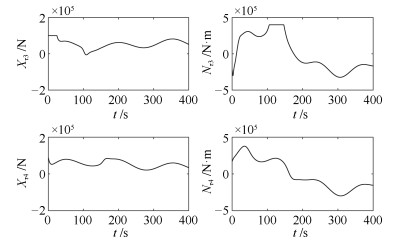
图 6 采用干扰观测器时跟随船1和2的控制输入
Fig. 6 Control inputs of the follower 1 and 2 using the disturbance observers
-
[1] 王祥科, 李迅, 郑志强.多智能体系统编队控制相关问题研究综述.控制与决策, 2013, 28(11):1601-1613 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201311001Wang Xiang-Ke, Li Xun, Zheng Zhi-Qiang. Survey of developments on multi-agent formation control related problems. Control and Decision, 2013, 28(11):1601-1613 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201311001 [2] 徐博, 白金磊, 郝燕玲, 高伟, 刘亚龙.多AUV协同导航问题的研究现状与进展.自动化学报, 2015, 41(3):445-461 http://www.aas.net.cn/CN/abstract/abstract18624.shtmlXu Bo, Bai Jin-Lei, Hao Yan-Ling, Gao Wei, Liu Ya-Long. The research status and progress of cooperative navigation for multiple AUVs. Acta Automatica Sinica, 2015, 41(3):445-461 http://www.aas.net.cn/CN/abstract/abstract18624.shtml [3] 耿志勇.基于庞特里亚金极小值原理的多运载体有限时间编队控制.自动化学报, 2017, 43(1):40-59 http://www.aas.net.cn/CN/abstract/abstract18987.shtmlGeng Zhi-Yong. Finite time formation control for multiple vehicles based on Pontryagin's minimum principle. Acta Automatica Sinica, 2017, 43(1):40-59 http://www.aas.net.cn/CN/abstract/abstract18987.shtml [4] 郭晨, 汪洋, 孙富春, 沈志鹏.欠驱动水面船舶运动控制研究综述.控制与决策, 2009, 24(3):321-329 doi: 10.3321/j.issn:1001-0920.2009.03.001Guo Chen, Wang Yang, Sun Fu-Chun, Shen Zhi-Peng. Survey for motion control of underactuated surface vessels. Control and Decision, 2009, 24(3):321-329 doi: 10.3321/j.issn:1001-0920.2009.03.001 [5] Thorvaldsen C F L, Skjetne R. Formation control of fully-actuated marine vessels using group agreement protocols. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, USA: IEEE, 2011. 4132-4139 [6] Ghommam J, Saad M, Mnif F. Robust adaptive formation control of fully actuated marine vessels using local potential functions. In: Proceedings of the 2010 IEEE International Conference on Robotics and Automation. Anchorage, USA: IEEE, 2010. 3001-3007 [7] Breivik M, Hovstein V E, Fossen T I. Ship formation control: a guided leader-follower approach. In: Proceedings of the 17th IFAC World Congress. Seoul, Southe Korea: IFAC, 2008. 16008-16014 [8] 王昊, 王丹, 彭周华, 孙刚.多自主船协同路径跟踪的自适应动态面控制.控制理论与应用, 2013, 30(5):637-643 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305015Wang Hao, Wang Dan, Peng Zhou-Hua, Sun Gang. Adaptive dynamic surface control for cooperative path following of multiple autonomous surface vessels. Control Theory & Applications, 2013, 30(5):637-643 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305015 [9] 付明玉, 焦建芳.基于虚拟领航者的船舶无源协调编队控制研究.自动化学报, 2014, 40(3):439-448 http://www.aas.net.cn/CN/abstract/abstract18309.shtmlFu Ming-Yu, Jiao Jian-Fang. Passive coordinated formation control for vessels based on virtual leader. Acta Automatica Sinica, 2014, 40(3):439-448 http://www.aas.net.cn/CN/abstract/abstract18309.shtml [10] Yin S, Yang H Y, Kaynak O. Coordination task triggered formation control algorithm for multiple marine vessels. IEEE Transactions on Industrial Electronics, 2017, 64(6):4984-4993 doi: 10.1109/TIE.2016.2574301 [11] Miswanto, Pranoto I, Muhammad H, Mahayana D. The control design of ship formation with the presence of a leader. International Journal of Robotics and Automation, 2015, 4(1):2089-4856 [12] Xiang X B, Lapierre L, Jouvencel B, Parodi O. Coordinated path following control of multiple nonholonomic vehicles. In: Proceedings of Oceans 2009-EUROPE. Bremen, Germany: IEEE, 2009. 1-7 [13] Cui R X, Ge S S, How B V E, Choo Y S. Leader-follower formation control of underactuated autonomous underwater vehicles. Ocean Engineering, 2010, 37(17-18):1491-1502 doi: 10.1016/j.oceaneng.2010.07.006 [14] Peng Z, Wang D, Hu X. Robust Adaptive formation control of underactuated autonomous surface vehicles with uncertain dynamics. IET Control Theory & Applications, 2011, 5(12):1378-1387 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ0222789896 [15] Peng Z H, Wang D, Chen Z Y, Hu X J, Lan W Y. Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics. IEEE Transactions on Control Systems Technology, 2013, 21(2):513-520 doi: 10.1109/TCST.2011.2181513 [16] Peymani E, Fossen T I. Leader-follower formation of marine craft using constraint forces and Lagrange multipliers. In: Proceedings of the 51st IEEE Conference on Decision and Control. Maui, USA: IEEE, 2012. 2447-2452 [17] 李芸, 肖英杰.领航跟随法和势函数组合的船舶编队控制.控制理论与应用, 2016, 33(9):1259-1264 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201609016Li Yun, Xiao Ying-Jie. Combination of leader-follower method and potential function about ship formation control. Control Theory & Applications, 2016, 33(9):1259-1264 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201609016 [18] Chen W H, Yang J, Guo L, Li S H. Disturbance-observer-based control and related methods-an overview. IEEE Transactions on Industrial Electronics, 2016, 63(2):1083-1095 doi: 10.1109/TIE.2015.2478397 [19] Fossen T I. Handbook of Marine Craft Hydrodynamics and Motion Control. West Sussex: John Wiley & Sons, 2011. 133-167 [20] Perez T. Ship Motion Control: Course Keeping and Roll Stabilisation Using Rudder and Fins. London: Springer-Verlag, 2005. 274-282 -

 下载:
下载:


计量
- 文章访问数: 4419
- HTML全文浏览量: 375
- PDF下载量: 626
- 被引次数: 0
