
2018年 第44卷 第7期
2018, 44(7): 1153-1164.
doi: 10.16383/j.aas.2018.c170392
摘要:
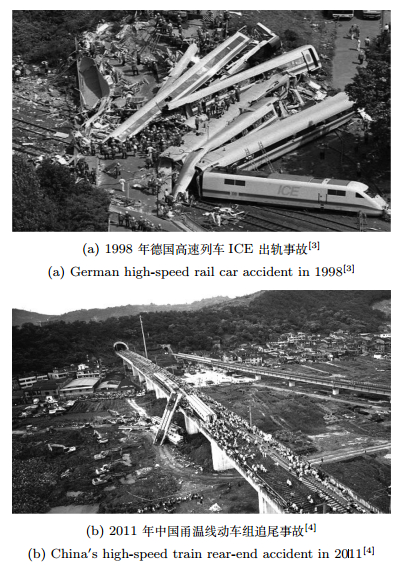
介绍高速列车故障诊断的研究意义,特别关注高速列车信息控制系统的故障诊断研究工作,给出高速列车信息控制系统的一般性定义.高速列车信息控制系统主要包括牵引传动控制系统、制动控制系统、列车运行控制系统和网络系统.针对每一个子系统,分别阐述其故障诊断技术的研究现状,简要分析相应故障诊断技术的思想与优劣特点.最后探讨高速列车故障诊断研究中亟待解决的问题以及未来可能的研究方向.
介绍高速列车故障诊断的研究意义,特别关注高速列车信息控制系统的故障诊断研究工作,给出高速列车信息控制系统的一般性定义.高速列车信息控制系统主要包括牵引传动控制系统、制动控制系统、列车运行控制系统和网络系统.针对每一个子系统,分别阐述其故障诊断技术的研究现状,简要分析相应故障诊断技术的思想与优劣特点.最后探讨高速列车故障诊断研究中亟待解决的问题以及未来可能的研究方向.

2018, 44(7): 1165-1182.
doi: 10.16383/j.aas.2017.c170049
摘要:
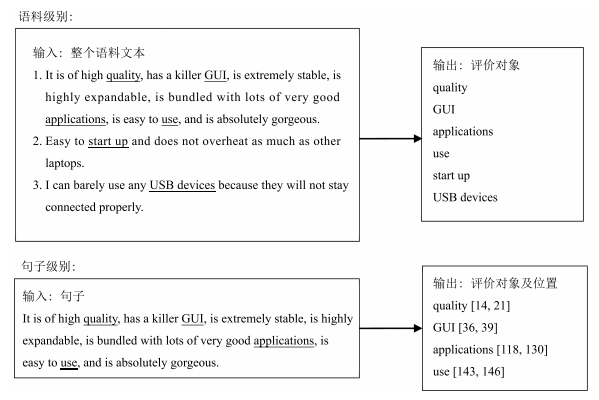
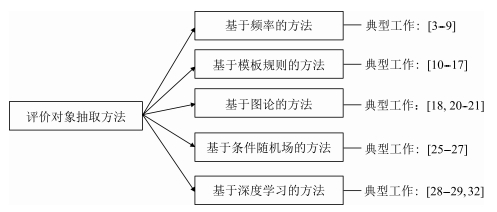
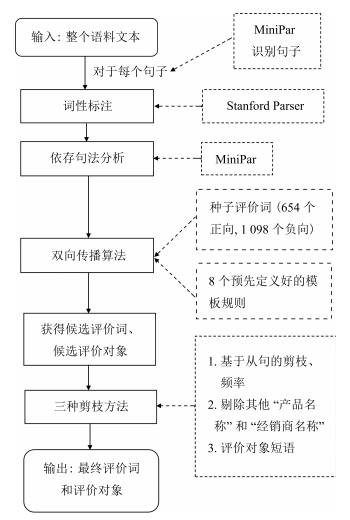
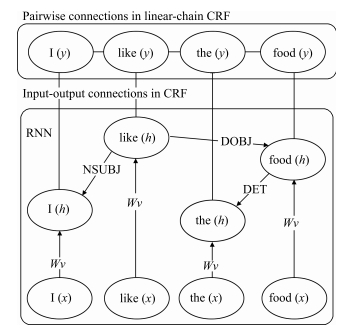
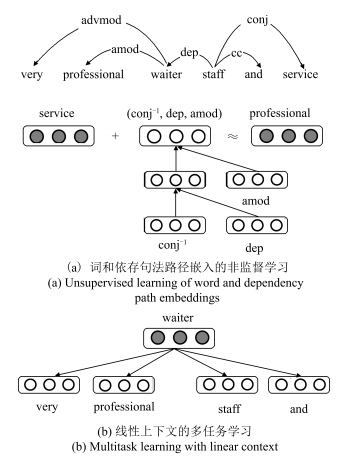
近年来,细粒度情感分析因其在商业决策、舆情分析等领域的重要作用而受到学术界和工业界的广泛关注.评价对象抽取作为情感分析的基本任务之一,是进行细粒度情感分析的关键问题.本文针对评价对象抽取问题的起源、当前主流研究方法和趋势进行了梳理,首先详细阐述评价对象抽取问题的基本概念并对其进行形式化表示,然后结合近年来的研究对评价对象抽取方法进行归纳和总结,并重点分析基于频率、基于模板规则、基于图论、基于条件随机场和基于深度学习的评价对象抽取方法,随后回顾评价对象抽取的评测情况和可用的语料资源,最后分析评价对象抽取的若干难点问题,同时对评价对象抽取研究进展和发展趋势进行总结和展望.
近年来,细粒度情感分析因其在商业决策、舆情分析等领域的重要作用而受到学术界和工业界的广泛关注.评价对象抽取作为情感分析的基本任务之一,是进行细粒度情感分析的关键问题.本文针对评价对象抽取问题的起源、当前主流研究方法和趋势进行了梳理,首先详细阐述评价对象抽取问题的基本概念并对其进行形式化表示,然后结合近年来的研究对评价对象抽取方法进行归纳和总结,并重点分析基于频率、基于模板规则、基于图论、基于条件随机场和基于深度学习的评价对象抽取方法,随后回顾评价对象抽取的评测情况和可用的语料资源,最后分析评价对象抽取的若干难点问题,同时对评价对象抽取研究进展和发展趋势进行总结和展望.

2018, 44(7): 1183-1194.
doi: 10.16383/j.aas.2017.c160711
摘要:
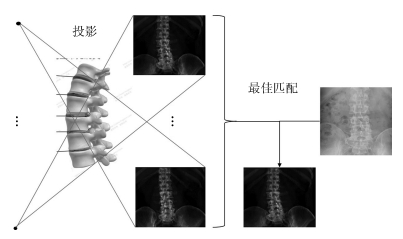
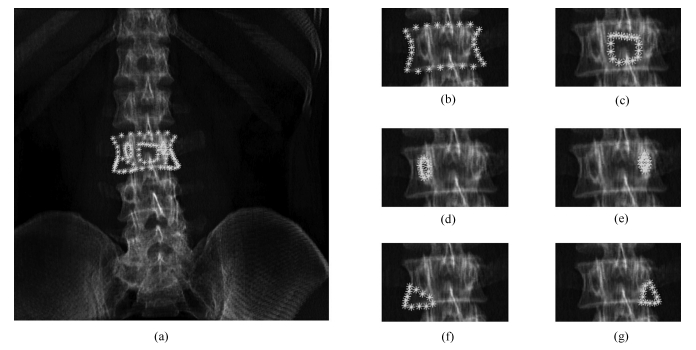
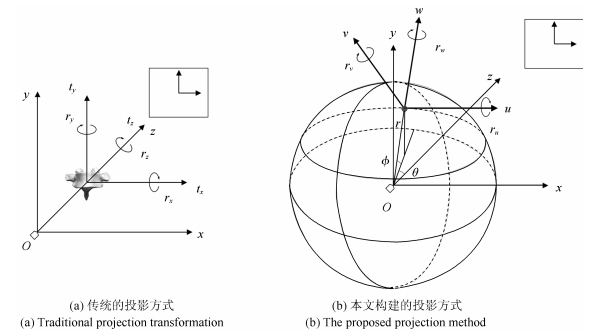
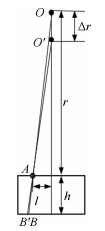
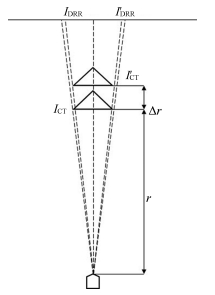
在图像引导的脊柱手术中,实时高效的2D/3D配准是一项重要且具有挑战性的任务.通常的2D/3D配准一般是将三维图像投影到二维平面,然后进行2D/2D的配准.由于投影空间涉及到3个平移以及3个旋转参数,其投影空间的复杂度为O(n6),使得配准很难兼具高准确性和高实时性.本文提出了一个结合机器学习与几何变换的2D/3D配准方法,首先,使用统计形状模型对目标脊椎进行建模,并构建了一种新的投影方式,使得6个投影参数中的4个可以使用几何的方法计算出来;接下来利用回归学习的方法学习目标脊椎的形状与投影参数之间的关系;最终,结合学到的关系和几何变换完成配准.本方法的两个姿态参数的平均预测误差为0.84°和0.81°,平均目标配准误差(Mean target registration error,mTRE)为0.87mm,平均配准时间为0.9s.实验结果表明本方法具有很好的实时性和准确性.
在图像引导的脊柱手术中,实时高效的2D/3D配准是一项重要且具有挑战性的任务.通常的2D/3D配准一般是将三维图像投影到二维平面,然后进行2D/2D的配准.由于投影空间涉及到3个平移以及3个旋转参数,其投影空间的复杂度为O(n6),使得配准很难兼具高准确性和高实时性.本文提出了一个结合机器学习与几何变换的2D/3D配准方法,首先,使用统计形状模型对目标脊椎进行建模,并构建了一种新的投影方式,使得6个投影参数中的4个可以使用几何的方法计算出来;接下来利用回归学习的方法学习目标脊椎的形状与投影参数之间的关系;最终,结合学到的关系和几何变换完成配准.本方法的两个姿态参数的平均预测误差为0.84°和0.81°,平均目标配准误差(Mean target registration error,mTRE)为0.87mm,平均配准时间为0.9s.实验结果表明本方法具有很好的实时性和准确性.





2018, 44(7): 1195-1211.
doi: 10.16383/j.aas.2017.c160532
摘要:
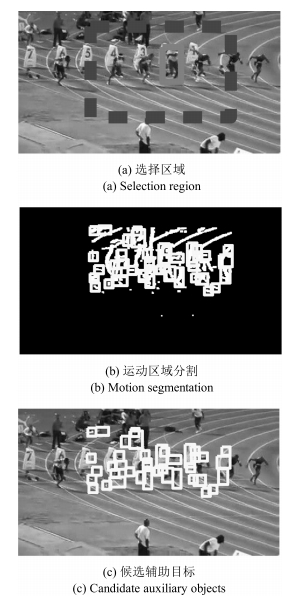
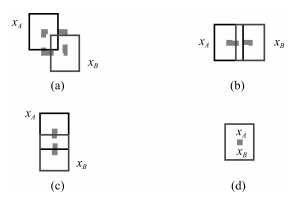
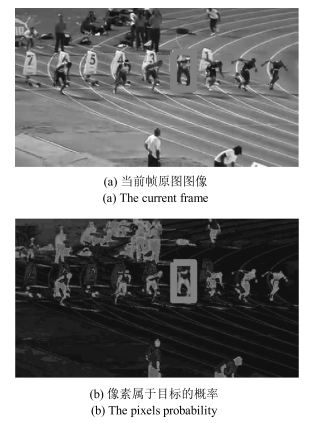
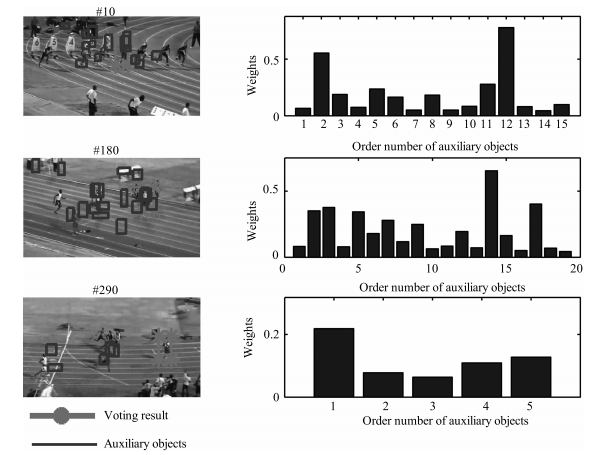
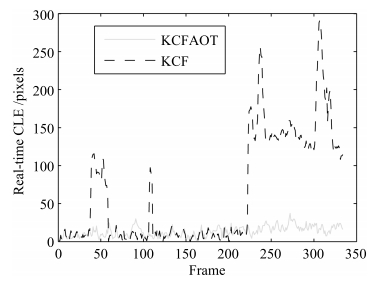
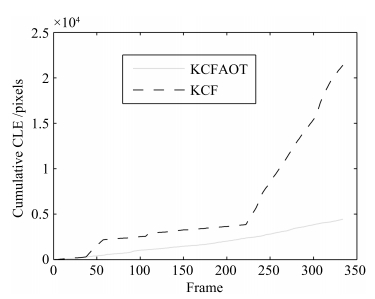
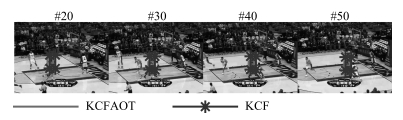
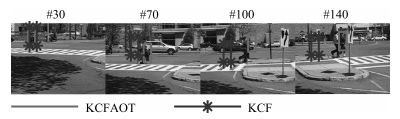
在目标的动态背景中存在有利于目标跟踪的信息.使用辅助目标来描述目标的动态背景,在跟踪目标的同时建立辅助目标与目标之间的运动依赖关系.用多个辅助目标预测目标的位置,将辅助目标预测结果与目标跟踪器预测结果融合得到目标位置.方法包括,利用辅助目标与目标之间的运动依赖关系和辅助目标自身跟踪精度的辅助目标选择方法;使用多个低精度辅助目标跟踪器获得良好的目标预测结果的辅助目标跟踪和目标预测方法;以及根据目标跟踪结果更新辅助目标跟踪参数的方法.辅助目标具有多样性和独立性.基于辅助目标的目标跟踪方法可以与其他目标跟踪器结合,具有推广泛化能力.实验结果表明,辅助目标在目标跟踪中发挥重要作用,与其他目标跟踪方法对比结果表明,有更好的鲁棒性和目标跟踪精度.
在目标的动态背景中存在有利于目标跟踪的信息.使用辅助目标来描述目标的动态背景,在跟踪目标的同时建立辅助目标与目标之间的运动依赖关系.用多个辅助目标预测目标的位置,将辅助目标预测结果与目标跟踪器预测结果融合得到目标位置.方法包括,利用辅助目标与目标之间的运动依赖关系和辅助目标自身跟踪精度的辅助目标选择方法;使用多个低精度辅助目标跟踪器获得良好的目标预测结果的辅助目标跟踪和目标预测方法;以及根据目标跟踪结果更新辅助目标跟踪参数的方法.辅助目标具有多样性和独立性.基于辅助目标的目标跟踪方法可以与其他目标跟踪器结合,具有推广泛化能力.实验结果表明,辅助目标在目标跟踪中发挥重要作用,与其他目标跟踪方法对比结果表明,有更好的鲁棒性和目标跟踪精度.






2018, 44(7): 1212-1226.
doi: 10.16383/j.aas.2017.c170061
摘要:
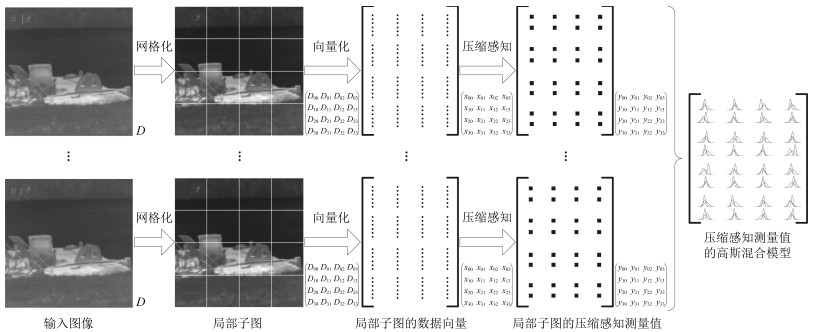
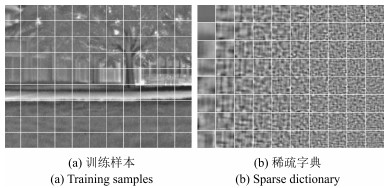
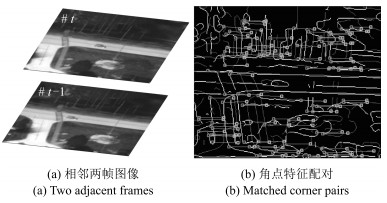
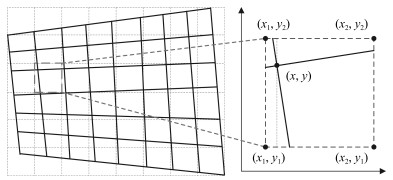
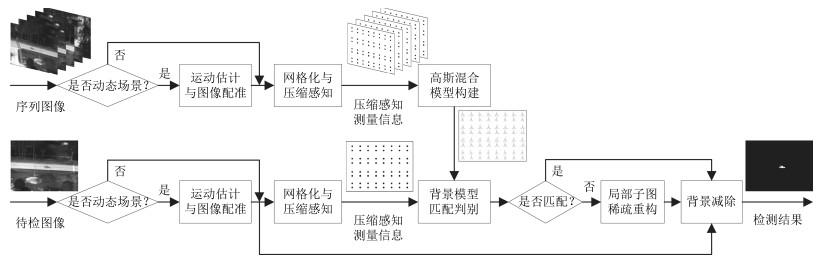
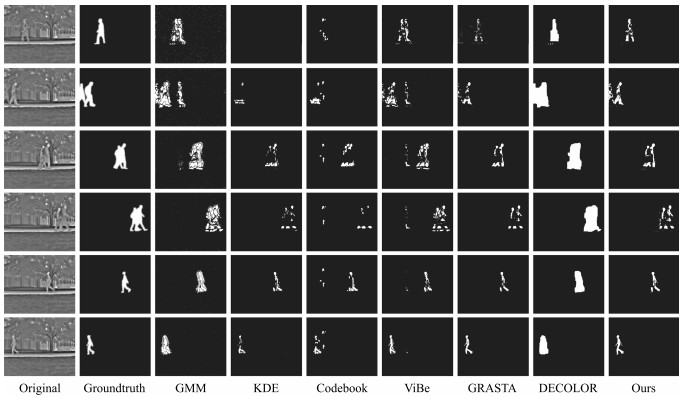
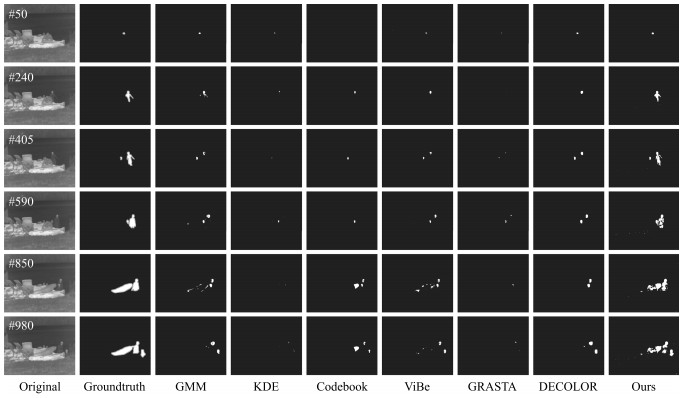
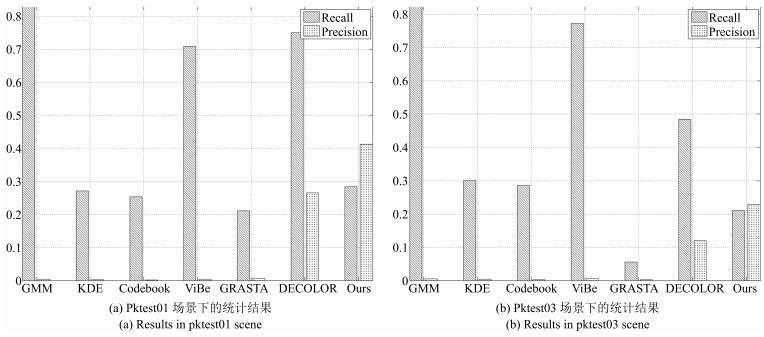
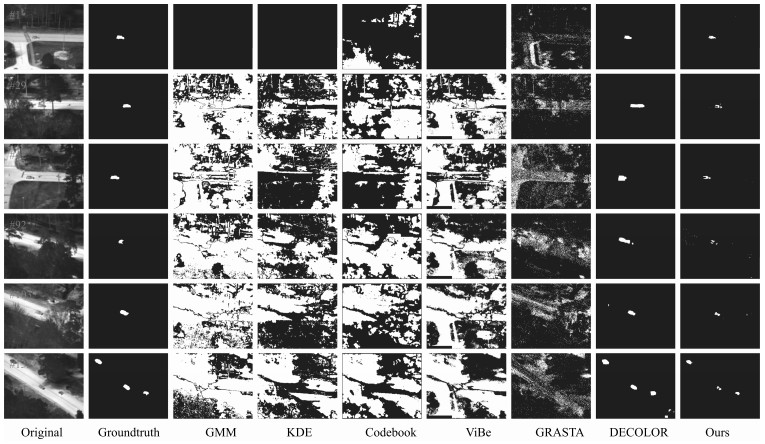
针对动态场景下红外图像的背景模型构建问题,提出一种基于压缩感知(Compressed sensing,CS)域高斯混合模型(Gaussian mixture model,GMM)的背景建模方法.该方法不是对图像中的每个像素建立高斯混合模型,而是对图像局部区域的压缩感知测量值建立高斯混合模型.1)通过提取红外图像轮廓的角点特征,估计相邻帧图像间的相对运动参数以对图像进行校正与配准;2)将每帧图像网格化为适当数目的局部子图,利用序列图像构建每个局部子图的压缩感知域高斯混合背景模型;3)采用子空间学习训练稀疏字典,通过子空间追踪对可能含有目标的局部子图进行选择性稀疏重构;4)通过背景减除实现前景目标检测.以红外图像数据集CDnet2014和VIVID PETS2005进行实验验证,结果表明:该方法能建立有效的动态场景红外图像背景模型,对成像过程中所受到的场景动态变化、背景扰动等具有较强的鲁棒性,其召回率、精确率、F-measure等性能指标及处理速度较之于同类算法具有明显优势.
针对动态场景下红外图像的背景模型构建问题,提出一种基于压缩感知(Compressed sensing,CS)域高斯混合模型(Gaussian mixture model,GMM)的背景建模方法.该方法不是对图像中的每个像素建立高斯混合模型,而是对图像局部区域的压缩感知测量值建立高斯混合模型.1)通过提取红外图像轮廓的角点特征,估计相邻帧图像间的相对运动参数以对图像进行校正与配准;2)将每帧图像网格化为适当数目的局部子图,利用序列图像构建每个局部子图的压缩感知域高斯混合背景模型;3)采用子空间学习训练稀疏字典,通过子空间追踪对可能含有目标的局部子图进行选择性稀疏重构;4)通过背景减除实现前景目标检测.以红外图像数据集CDnet2014和VIVID PETS2005进行实验验证,结果表明:该方法能建立有效的动态场景红外图像背景模型,对成像过程中所受到的场景动态变化、背景扰动等具有较强的鲁棒性,其召回率、精确率、F-measure等性能指标及处理速度较之于同类算法具有明显优势.



2018, 44(7): 1227-1236.
doi: 10.16383/j.aas.2017.c160578
摘要:
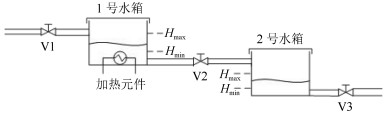
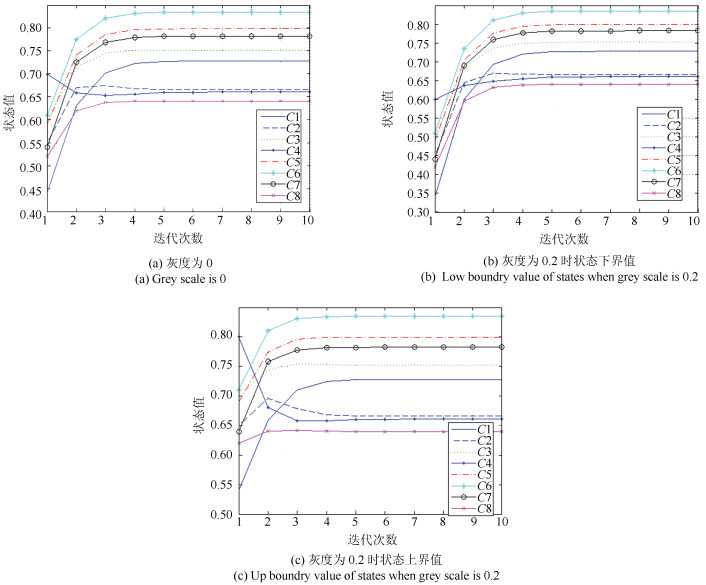
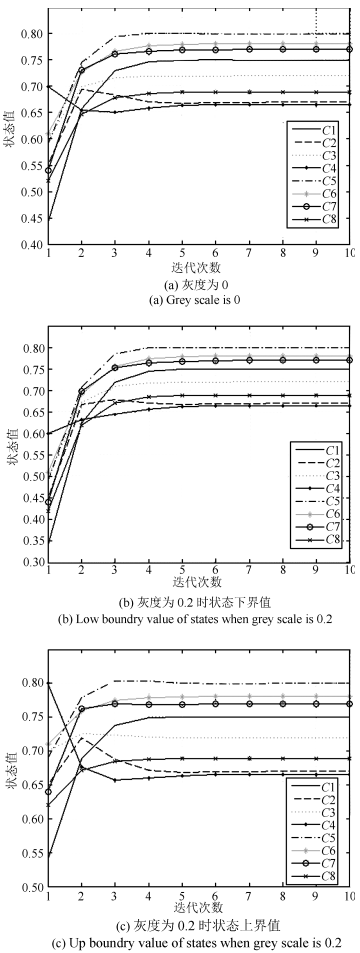
针对具有不确定性非线性系统的机理模型难以建立的问题,提出了基于模糊灰色认知网络(Fuzzy grey cognitive networks,FGCN)的非线性系统建模方法.该方法将模糊认知网络和灰色系统理论相结合,把模糊认知网络的节点状态值和权值扩展为灰色区间,引入灰度来评判可靠性.采用一种带终端约束的非线性Hebbian学习算法(Nonlinear hebbian learning,NHL)辨识FGCN的模型参数,引入了与FGCN模型中节点的系统实际测量值对应的灰数值,在更新机制中增加了包含系统测量值与预测值之差的修正项,对权值进行有监督的修正.利用水箱控制系统进行的仿真实验结果表明,本文提出的建模方法能解决对数据存在不确定性或缺失的复杂系统建模的难题,所建的模型能做出接近人类智能的控制决策,所采用的权值学习方法具有收敛速度快、学习结果精准等优点,并克服了传统非线性Hebbian算法对初始值依赖性强的缺点,对不确定性系统的建模具有广泛适用性.
针对具有不确定性非线性系统的机理模型难以建立的问题,提出了基于模糊灰色认知网络(Fuzzy grey cognitive networks,FGCN)的非线性系统建模方法.该方法将模糊认知网络和灰色系统理论相结合,把模糊认知网络的节点状态值和权值扩展为灰色区间,引入灰度来评判可靠性.采用一种带终端约束的非线性Hebbian学习算法(Nonlinear hebbian learning,NHL)辨识FGCN的模型参数,引入了与FGCN模型中节点的系统实际测量值对应的灰数值,在更新机制中增加了包含系统测量值与预测值之差的修正项,对权值进行有监督的修正.利用水箱控制系统进行的仿真实验结果表明,本文提出的建模方法能解决对数据存在不确定性或缺失的复杂系统建模的难题,所建的模型能做出接近人类智能的控制决策,所采用的权值学习方法具有收敛速度快、学习结果精准等优点,并克服了传统非线性Hebbian算法对初始值依赖性强的缺点,对不确定性系统的建模具有广泛适用性.


2018, 44(7): 1237-1249.
doi: 10.16383/j.aas.2017.c160733
摘要:
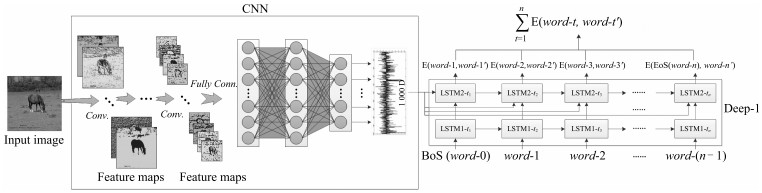
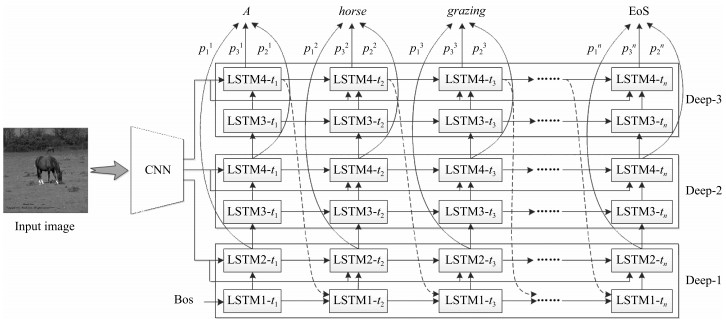
使用计算模型对图像进行自动描述属于视觉高层理解,要求模型不仅能够对图像中的目标及场景进行描述,而且能够对目标与目标之间、目标与场景之间的关系进行表达,同时能够生成符合一定语法和结构的自然语言句子.目前基于深度卷积神经网络(Convolutional neural network,CNN)和长短时记忆网络(Long-short term memory,LSTM)的方法已成为解决该问题的主流,虽然已取得巨大进展,但存在LSTM层次不深,难以优化的问题,导致模型性能难以提升,生成的描述句子质量不高.针对这一问题,受深度学习思想的启发,本文设计了基于逐层优化的多目标优化及多层概率融合的LSTM(Multi-objective layer-wise optimization/multi-layer probability fusion LSTM,MLO/MLPF-LSTM)模型.模型中首先使用浅层LSTM进行训练,收敛之后,保留原LSTM模型中的分类层及目标函数,并添加新的LSTM层及目标函数重新对模型进行训练,对模型原有参数进行微调;在测试时,将多个分类层使用Softmax函数进行变换,得到每层对单词的预测概率分值,然后将多层的概率分值进行加权融合,得到单词的最终预测概率.在MSCOCO和Flickr30K两个数据集上实验结果显示,该模型性能显著,在多个统计指标上均超过了同类其他方法.
使用计算模型对图像进行自动描述属于视觉高层理解,要求模型不仅能够对图像中的目标及场景进行描述,而且能够对目标与目标之间、目标与场景之间的关系进行表达,同时能够生成符合一定语法和结构的自然语言句子.目前基于深度卷积神经网络(Convolutional neural network,CNN)和长短时记忆网络(Long-short term memory,LSTM)的方法已成为解决该问题的主流,虽然已取得巨大进展,但存在LSTM层次不深,难以优化的问题,导致模型性能难以提升,生成的描述句子质量不高.针对这一问题,受深度学习思想的启发,本文设计了基于逐层优化的多目标优化及多层概率融合的LSTM(Multi-objective layer-wise optimization/multi-layer probability fusion LSTM,MLO/MLPF-LSTM)模型.模型中首先使用浅层LSTM进行训练,收敛之后,保留原LSTM模型中的分类层及目标函数,并添加新的LSTM层及目标函数重新对模型进行训练,对模型原有参数进行微调;在测试时,将多个分类层使用Softmax函数进行变换,得到每层对单词的预测概率分值,然后将多层的概率分值进行加权融合,得到单词的最终预测概率.在MSCOCO和Flickr30K两个数据集上实验结果显示,该模型性能显著,在多个统计指标上均超过了同类其他方法.





2018, 44(7): 1250-1259.
doi: 10.16383/j.aas.2017.c160763
摘要:
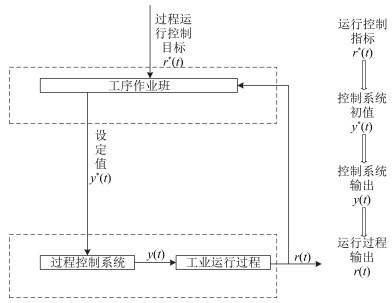
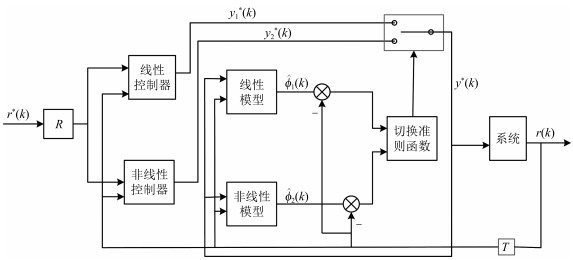
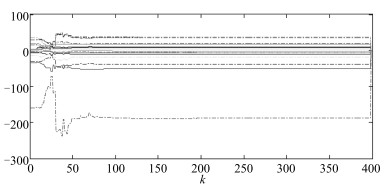
针对一类动态未知的工业运行过程,提出一种基于神经网络补偿和多模型切换的自适应控制方法.为充分考虑底层跟踪误差对整个运行过程优化和控制的影响,将底层极点配置控制系统和上层运行层动态模型相结合,作为运行过程动态模型.针对参数未知的运行过程动态模型,设计由线性鲁棒自适应控制器、基于神经网络补偿的非线性自适应控制器以及切换机制组成的多模型自适应控制算法.采用带死区的递推最小二乘算法在线辨识控制器参数,克服了投影算法收敛速度慢、对参数初值灵敏的局限.理论分析和仿真实验结果表明了所提方法的有效性.
针对一类动态未知的工业运行过程,提出一种基于神经网络补偿和多模型切换的自适应控制方法.为充分考虑底层跟踪误差对整个运行过程优化和控制的影响,将底层极点配置控制系统和上层运行层动态模型相结合,作为运行过程动态模型.针对参数未知的运行过程动态模型,设计由线性鲁棒自适应控制器、基于神经网络补偿的非线性自适应控制器以及切换机制组成的多模型自适应控制算法.采用带死区的递推最小二乘算法在线辨识控制器参数,克服了投影算法收敛速度慢、对参数初值灵敏的局限.理论分析和仿真实验结果表明了所提方法的有效性.



2018, 44(7): 1260-1270.
doi: 10.16383/j.aas.2018.c160752
摘要:
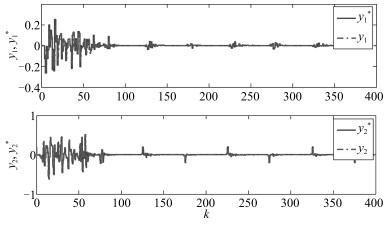
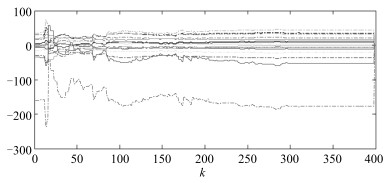
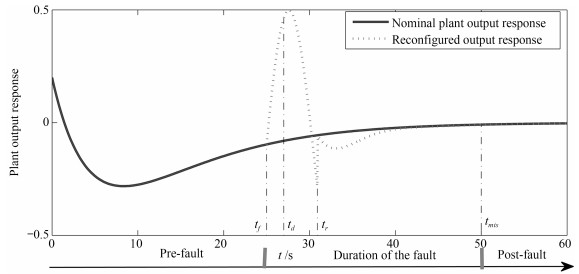
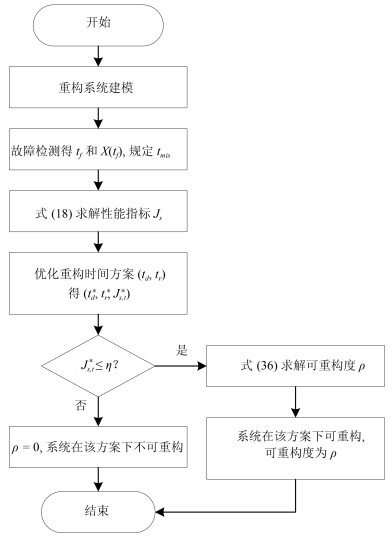
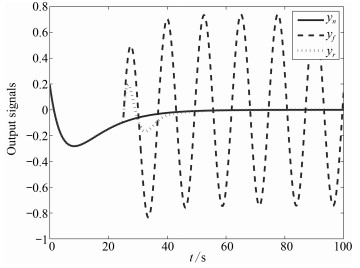
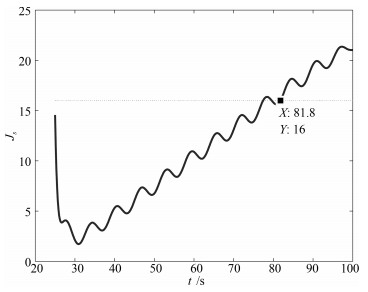
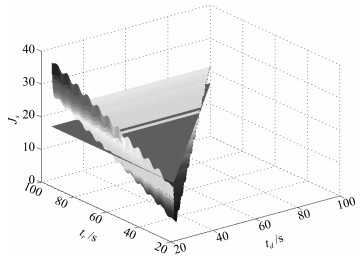
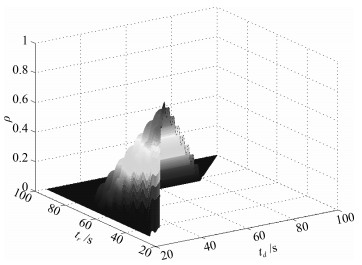
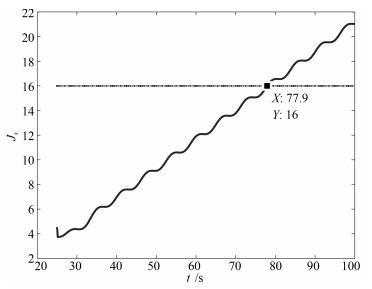
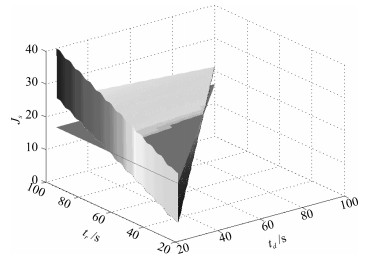
故障诊断时间和控制重构延时严重影响了控制系统的实际重构性能,然而目前缺乏相关研究.基于该现状,本文针对执行器快变偏差故障,重点考虑时间特性影响,结合能量与输入约束,对控制系统可重构性的定量评价问题展开了研究.首先,以基于观测器的故障诊断算法和控制重构方案为例,建立了重构系统模型;然后,以该模型为对象,通过对重构过程中关键时刻的分析,深入研究了系统故障后的动态特性,并综合考虑故障引起的状态偏差、资源浪费以及诊断误差,设计了用于描述故障系统性能下降程度的二次型性能指标;其次,利用Lyapunov稳定性理论,定量求解了性能指标关于时间的一般表达式,进而求得该指标在整个时域中的最优解;最后,基于最优性能指标,引入了可重构度的概念,实现了对控制系统可重构性的理论判定以及定量描述,并通过数值仿真验证了所提可重构性分析方法的有效性.
故障诊断时间和控制重构延时严重影响了控制系统的实际重构性能,然而目前缺乏相关研究.基于该现状,本文针对执行器快变偏差故障,重点考虑时间特性影响,结合能量与输入约束,对控制系统可重构性的定量评价问题展开了研究.首先,以基于观测器的故障诊断算法和控制重构方案为例,建立了重构系统模型;然后,以该模型为对象,通过对重构过程中关键时刻的分析,深入研究了系统故障后的动态特性,并综合考虑故障引起的状态偏差、资源浪费以及诊断误差,设计了用于描述故障系统性能下降程度的二次型性能指标;其次,利用Lyapunov稳定性理论,定量求解了性能指标关于时间的一般表达式,进而求得该指标在整个时域中的最优解;最后,基于最优性能指标,引入了可重构度的概念,实现了对控制系统可重构性的理论判定以及定量描述,并通过数值仿真验证了所提可重构性分析方法的有效性.



2018, 44(7): 1271-1281.
doi: 10.16383/j.aas.2017.c160681
摘要:
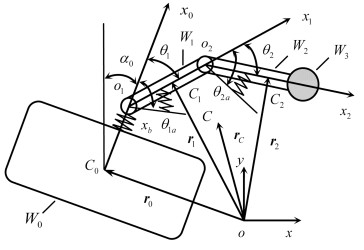
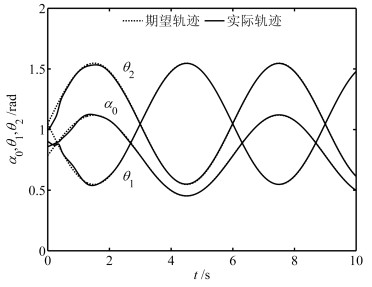
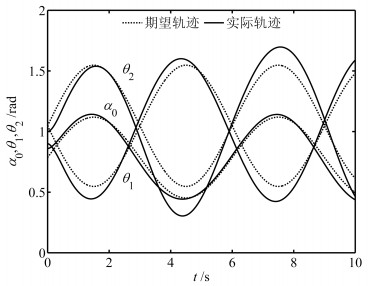
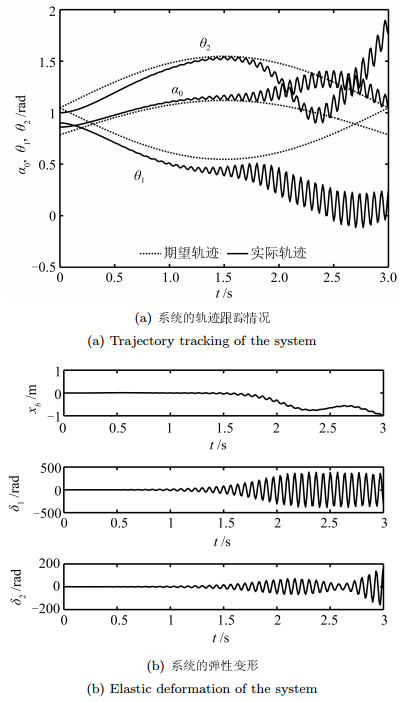
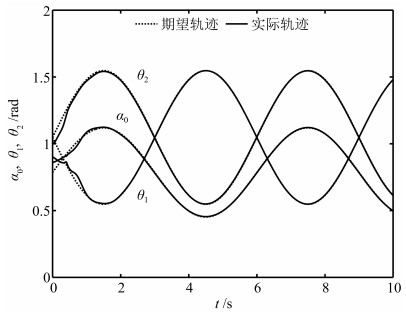
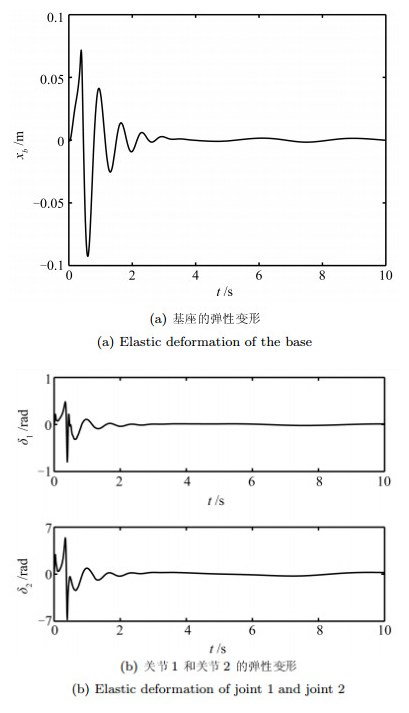
研究不确定弹性基和弹性关节空间机器人的抗扰运动控制及基座和关节弹性振动同步抑制问题.在对基座和关节弹性进行等效线性弹簧假设的基础上,建立了弹性基和弹性关节空间机器人的动力学方程,并推导了基于等效刚度思想的奇异摄动慢、快变子系统.对传统参数自适应控制律进行σ修正并与鲁棒抗扰控制相结合,对不确定参数和有界外部扰动影响下的慢变子系统提出了基座姿态和臂杆关节刚性运动轨迹跟踪的改进自适应鲁棒抗扰控制方案.使用高增益线性状态观测器对快变高阶量进行实时观测,针对快变子系统设计了基座和关节弹性振动同步抑制的改进最优控制方案.仿真示例分析,表明了所提混合控制方案在空间机器人抗扰运动控制及振动抑制上的有效性.
研究不确定弹性基和弹性关节空间机器人的抗扰运动控制及基座和关节弹性振动同步抑制问题.在对基座和关节弹性进行等效线性弹簧假设的基础上,建立了弹性基和弹性关节空间机器人的动力学方程,并推导了基于等效刚度思想的奇异摄动慢、快变子系统.对传统参数自适应控制律进行σ修正并与鲁棒抗扰控制相结合,对不确定参数和有界外部扰动影响下的慢变子系统提出了基座姿态和臂杆关节刚性运动轨迹跟踪的改进自适应鲁棒抗扰控制方案.使用高增益线性状态观测器对快变高阶量进行实时观测,针对快变子系统设计了基座和关节弹性振动同步抑制的改进最优控制方案.仿真示例分析,表明了所提混合控制方案在空间机器人抗扰运动控制及振动抑制上的有效性.

2018, 44(7): 1282-1292.
doi: 10.16383/j.aas.2018.c170620
摘要:
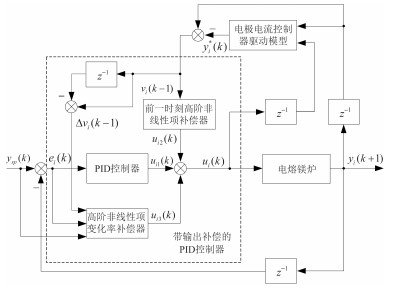
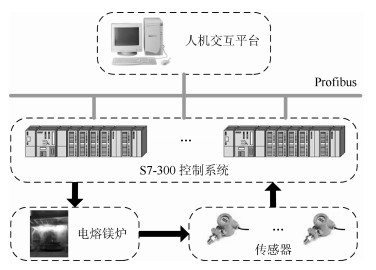
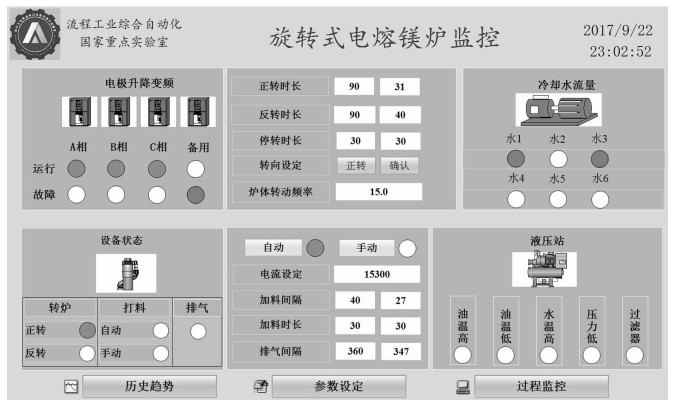
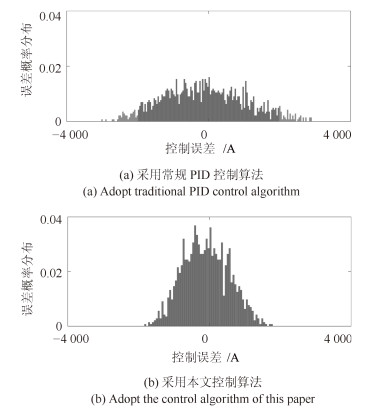
电熔镁砂熔炼过程是以三相电机转动方向与频率为输入,以三相电极电流为输出的强非线性工业过程,其模型参数埋弧电阻率、熔池电阻率和熔池高度随熔炼过程和原矿颗粒长度及杂质成分的变化而变化.本文采用线性模型和未知高阶非线性项来描述电熔镁砂熔炼过程,其中未知高阶非线性项用已知的前一时刻高阶非线性项和其变化率来描述,采用线性模型设计PID控制器,并设计消除前一时刻高阶非线性项的补偿器和消除其变化率的补偿器,提出了带输出补偿的PID控制器,同时采用一步最优前馈控制律和一步最优调节律设计控制器参数.通过仿真实验和电熔镁炉的工业应用,表明当该过程的动态特性发生未知随机变化时,本文所提方法在所有运行时间内可以将电流跟踪误差控制在目标值范围内.
电熔镁砂熔炼过程是以三相电机转动方向与频率为输入,以三相电极电流为输出的强非线性工业过程,其模型参数埋弧电阻率、熔池电阻率和熔池高度随熔炼过程和原矿颗粒长度及杂质成分的变化而变化.本文采用线性模型和未知高阶非线性项来描述电熔镁砂熔炼过程,其中未知高阶非线性项用已知的前一时刻高阶非线性项和其变化率来描述,采用线性模型设计PID控制器,并设计消除前一时刻高阶非线性项的补偿器和消除其变化率的补偿器,提出了带输出补偿的PID控制器,同时采用一步最优前馈控制律和一步最优调节律设计控制器参数.通过仿真实验和电熔镁炉的工业应用,表明当该过程的动态特性发生未知随机变化时,本文所提方法在所有运行时间内可以将电流跟踪误差控制在目标值范围内.






2018, 44(7): 1293-1303.
doi: 10.16383/j.aas.2018.c160569
摘要:
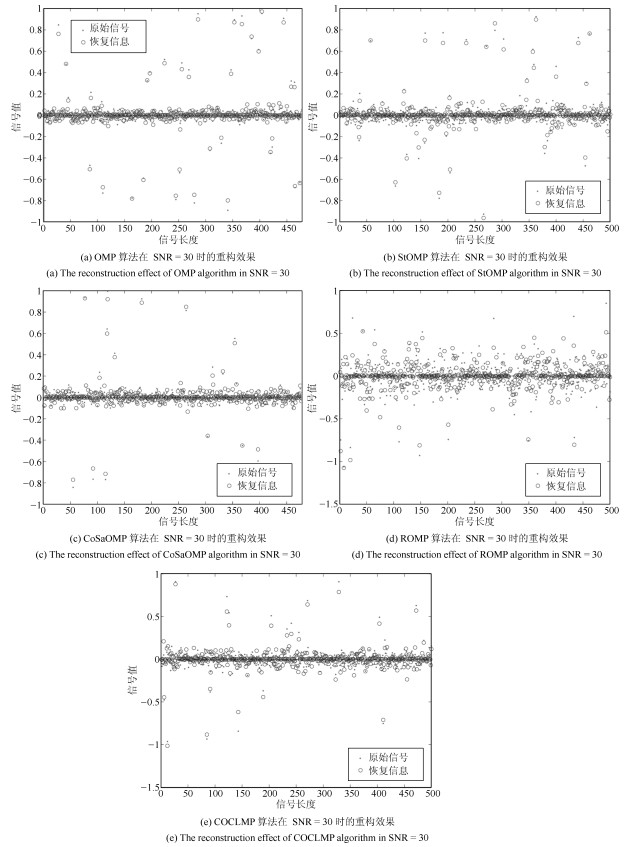
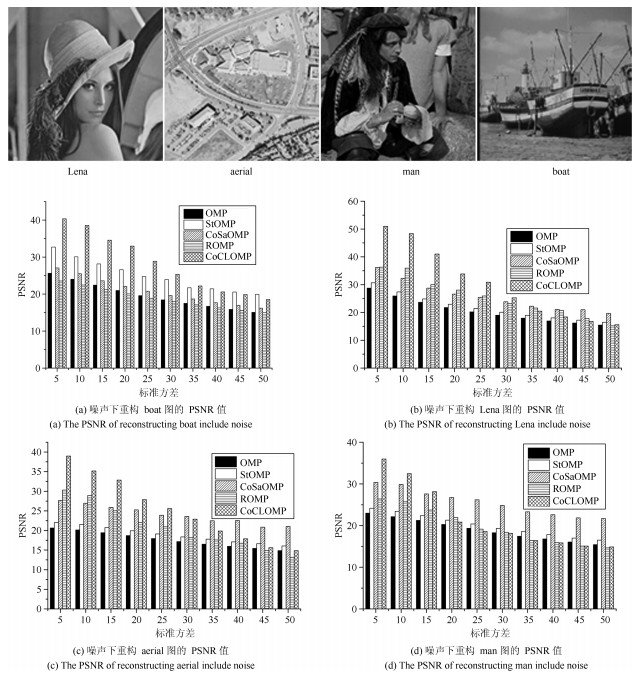
在压缩感知理论中,设计好的稀疏重构算法是一个比较重要,同时也是一个具有挑战性的问题.稀疏重构的基本目标是用较少的数据样本,通过解一个优化问题完成信号或者图像重构.关于稀疏重构过程,一个重要的研究方向是在数据受噪声干扰的情况下,如何高效快速地重建原信号.本文提出了基于共轭梯度最小二乘法(Conjugate gradient least squares,CGLS)和最小二乘QR分解(Least squares QR,LSQR)的联合优化的匹配追踪算法.该算法采用Alpha散度来测量CGLS和LSQR之间的离散度(差异度),并通过离散度来选择最优的解序列.实验分析表明基于CGLS和LSQR的联合优化的匹配追踪算法在压缩采样的信号受噪声干扰情况下具有较好的恢复能力.
在压缩感知理论中,设计好的稀疏重构算法是一个比较重要,同时也是一个具有挑战性的问题.稀疏重构的基本目标是用较少的数据样本,通过解一个优化问题完成信号或者图像重构.关于稀疏重构过程,一个重要的研究方向是在数据受噪声干扰的情况下,如何高效快速地重建原信号.本文提出了基于共轭梯度最小二乘法(Conjugate gradient least squares,CGLS)和最小二乘QR分解(Least squares QR,LSQR)的联合优化的匹配追踪算法.该算法采用Alpha散度来测量CGLS和LSQR之间的离散度(差异度),并通过离散度来选择最优的解序列.实验分析表明基于CGLS和LSQR的联合优化的匹配追踪算法在压缩采样的信号受噪声干扰情况下具有较好的恢复能力.


2018, 44(7): 1304-1320.
doi: 10.16383/j.aas.2017.c160315
摘要:
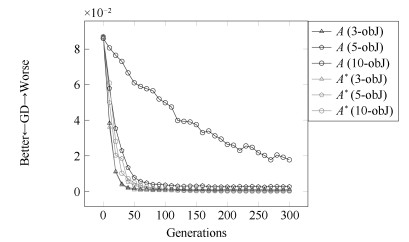
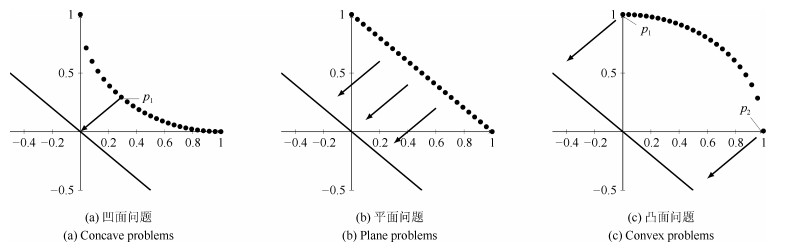
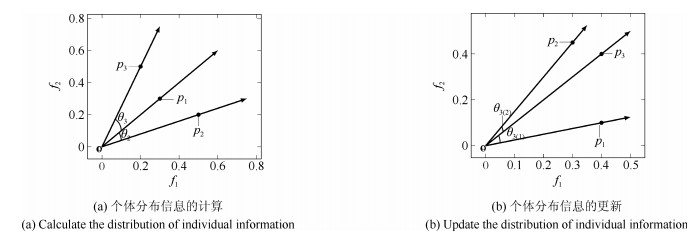
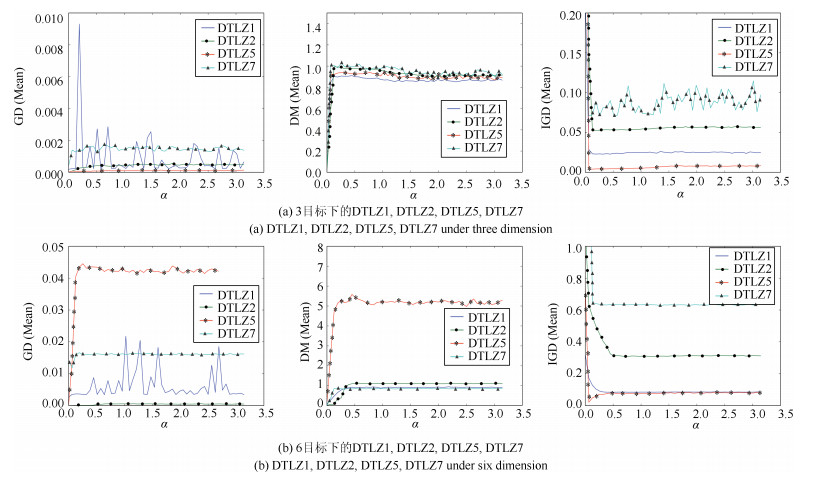
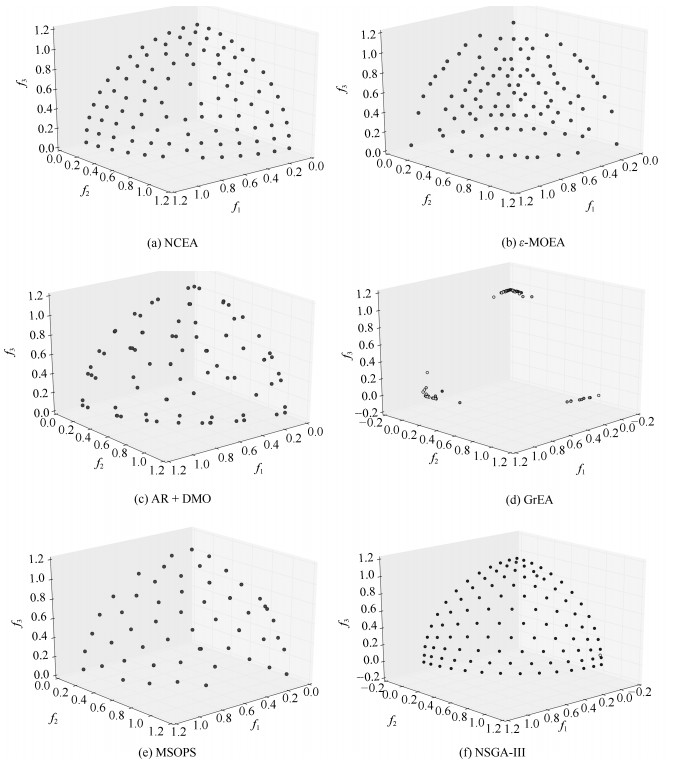
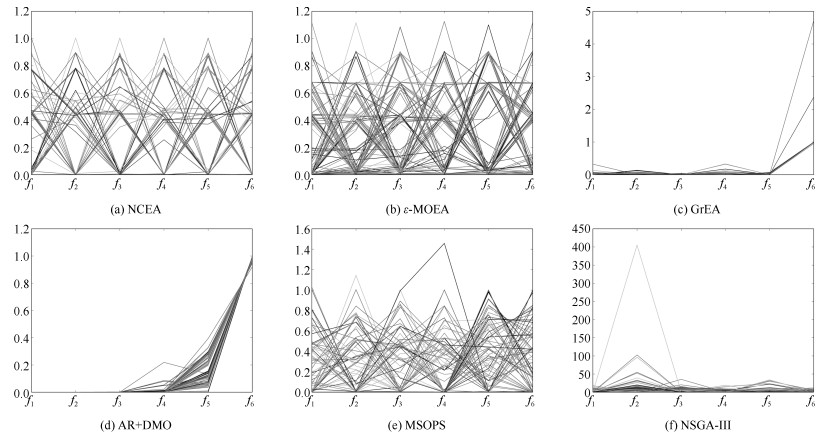
传统多目标优化算法(Multi-objective evolution algorithms,MOEAs)的基本框架大致分为两部分:首先是收敛性保持,采用Pareto支配方法将种群分成若干非支配层;其次是分布性保持,在临界层中,采用分布性保持机制维持种群的分布性.然而在处理高维优化问题(Many-objective optimization problems,MOPs)(目标维数大于3)时,随着目标维数的增加,种群的收敛性和分布性的冲突加剧,Pareto支配关系比较个体优劣的能力也迅速下降,此时传统的MOEA已不再适用于高维优化问题.鉴于此,本文提出了一种基于邻域竞赛的多目标优化算法(Evolutionary algorithm based on neighborhood competition for multi-objective optimization,NCEA).NCEA首先将个体的各个目标之和作为个体的收敛性估计;然后,计算当前个体向量与收敛性最好的个体向量之间的夹角,并将其作为当前个体的邻域估计;最后,通过邻域竞赛方法将问题划分为若干个相互关联的子问题并逐步优化.为了验证NCEA的有效性,本文选取5个优秀的算法与NCEA进行对比实验.通过对比实验验证,NCEA具有较强的竞争力,能同时保持良好的收敛性和分布性.
传统多目标优化算法(Multi-objective evolution algorithms,MOEAs)的基本框架大致分为两部分:首先是收敛性保持,采用Pareto支配方法将种群分成若干非支配层;其次是分布性保持,在临界层中,采用分布性保持机制维持种群的分布性.然而在处理高维优化问题(Many-objective optimization problems,MOPs)(目标维数大于3)时,随着目标维数的增加,种群的收敛性和分布性的冲突加剧,Pareto支配关系比较个体优劣的能力也迅速下降,此时传统的MOEA已不再适用于高维优化问题.鉴于此,本文提出了一种基于邻域竞赛的多目标优化算法(Evolutionary algorithm based on neighborhood competition for multi-objective optimization,NCEA).NCEA首先将个体的各个目标之和作为个体的收敛性估计;然后,计算当前个体向量与收敛性最好的个体向量之间的夹角,并将其作为当前个体的邻域估计;最后,通过邻域竞赛方法将问题划分为若干个相互关联的子问题并逐步优化.为了验证NCEA的有效性,本文选取5个优秀的算法与NCEA进行对比实验.通过对比实验验证,NCEA具有较强的竞争力,能同时保持良好的收敛性和分布性.


2018, 44(7): 1321-1332.
doi: 10.16383/j.aas.2017.c170267
摘要:
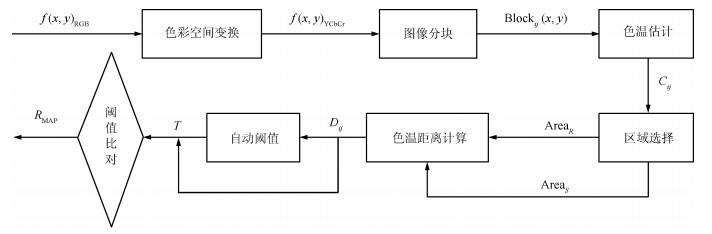
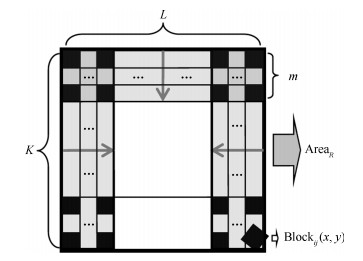
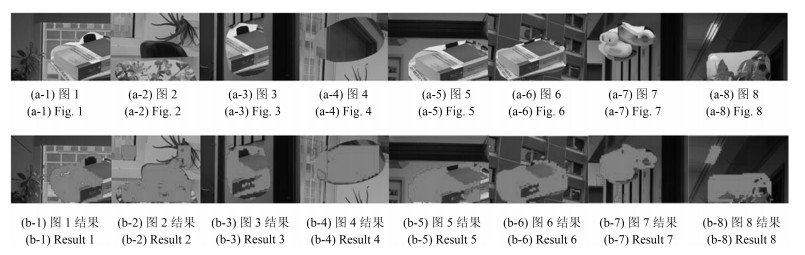
拼接篡改是一类常见的图像伪造手段,现有取证方法难以实现图像中拼接篡改区域的自动检测与精确定位,导致拼接篡改伪造图像的取证长期依赖人工经验.基于图像中原始区域与拼接篡改区域所反映的光源色温的差异性,提出一种自动色温距离阈值分类的图像拼接篡改检测与定位方法.首先,变换待检验图像至YCbCr色彩空间,并按照Grid-based方式结构化分解为大小的子图像块;然后,利用自动白平衡(Automatic white balance,AWB)中的白点检测原理对每一个子图像块进行色温估计,计算子图像块与参考区域之间的色温距离;最后,采用最大类间方差法自适应地求取色温距离分类的最佳阈值,对子图像块进行分类标注,实现了图像拼接篡改区域的自动检测与精确定位.实验表明,该方法能够实现图像拼接篡改区域的自动检测与定位,具有较高的量化检测精度.
拼接篡改是一类常见的图像伪造手段,现有取证方法难以实现图像中拼接篡改区域的自动检测与精确定位,导致拼接篡改伪造图像的取证长期依赖人工经验.基于图像中原始区域与拼接篡改区域所反映的光源色温的差异性,提出一种自动色温距离阈值分类的图像拼接篡改检测与定位方法.首先,变换待检验图像至YCbCr色彩空间,并按照Grid-based方式结构化分解为大小的子图像块;然后,利用自动白平衡(Automatic white balance,AWB)中的白点检测原理对每一个子图像块进行色温估计,计算子图像块与参考区域之间的色温距离;最后,采用最大类间方差法自适应地求取色温距离分类的最佳阈值,对子图像块进行分类标注,实现了图像拼接篡改区域的自动检测与精确定位.实验表明,该方法能够实现图像拼接篡改区域的自动检测与定位,具有较高的量化检测精度.


2018, 44(7): 1333-1344.
doi: 10.16383/j.aas.2017.c170048
摘要:
针对开放式环境下松耦合程度和可靠性不够的协作模式的缺点,以及协同制造装配问题出现的"结构失配"和"工艺革新"的特性,提出CRQAOVTMAgent模型.模型从服务参数(属性)松耦合程度和服务执行结果确定性两个方面区别定义普通(O,Ordinary)接口、转换(V, conVersion)接口、多参数适配器(T, multiparameter adapTor)接口和概念实例调制器(M, concept instance Modulator)接口,并在此基础上提供包括普通协作、转换性协作、适配性协作和调制性协作的混合协作模式,且在处方的基础上引入量化合成,以更加灵活的方式处理"结构失配"和"工艺革新"问题.同时模型引入合同的约束,保证自组织协作是可信的.通过验证并与RPACTI Agent模型比较可知,该模型的协作机制既具有很高的成功率和效率,又具有很高的灵活性,更加适合开放环境下的协同制造装配.
针对开放式环境下松耦合程度和可靠性不够的协作模式的缺点,以及协同制造装配问题出现的"结构失配"和"工艺革新"的特性,提出CRQAOVTMAgent模型.模型从服务参数(属性)松耦合程度和服务执行结果确定性两个方面区别定义普通(O,Ordinary)接口、转换(V, conVersion)接口、多参数适配器(T, multiparameter adapTor)接口和概念实例调制器(M, concept instance Modulator)接口,并在此基础上提供包括普通协作、转换性协作、适配性协作和调制性协作的混合协作模式,且在处方的基础上引入量化合成,以更加灵活的方式处理"结构失配"和"工艺革新"问题.同时模型引入合同的约束,保证自组织协作是可信的.通过验证并与RPACTI Agent模型比较可知,该模型的协作机制既具有很高的成功率和效率,又具有很高的灵活性,更加适合开放环境下的协同制造装配.













