2019年 第45卷 第12期
2019, 45(12): 2208-2217.
doi: 10.16383/j.aas.2019.y000004
cstr: 32138.14.j.aas.2019.y000004
摘要:
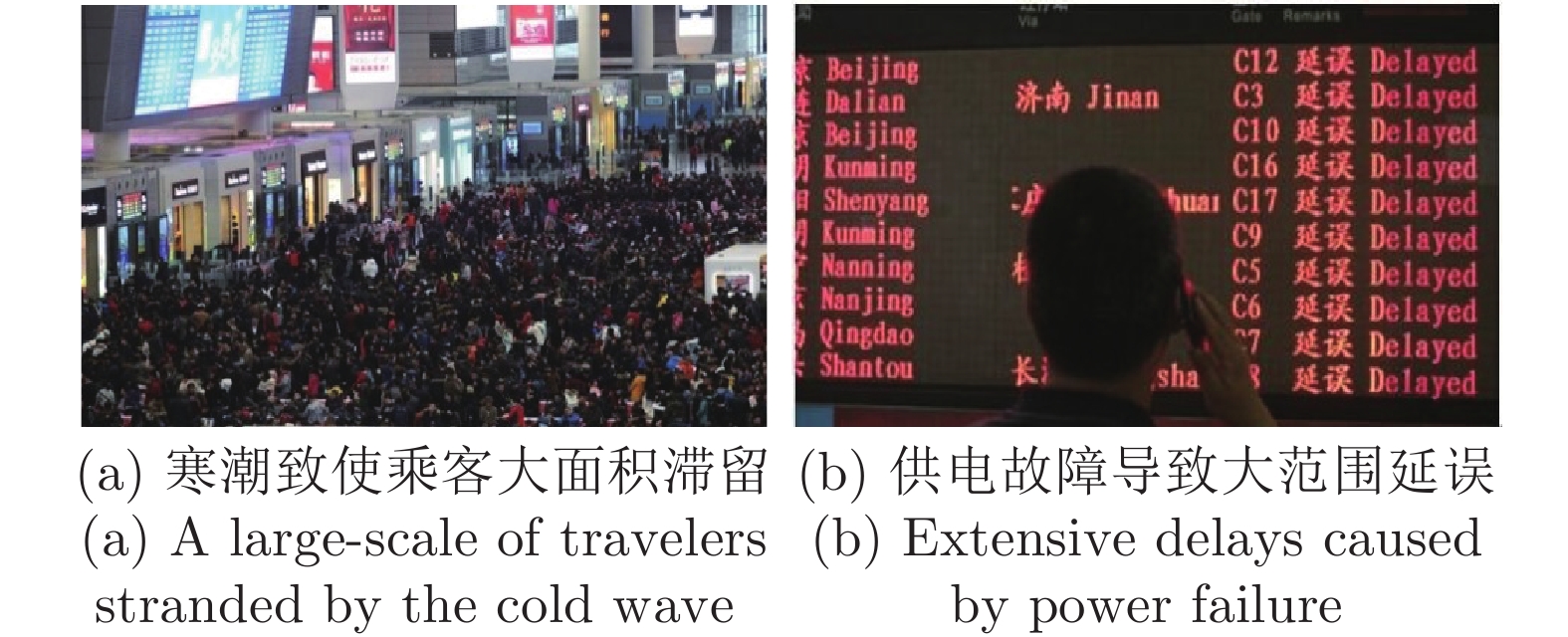
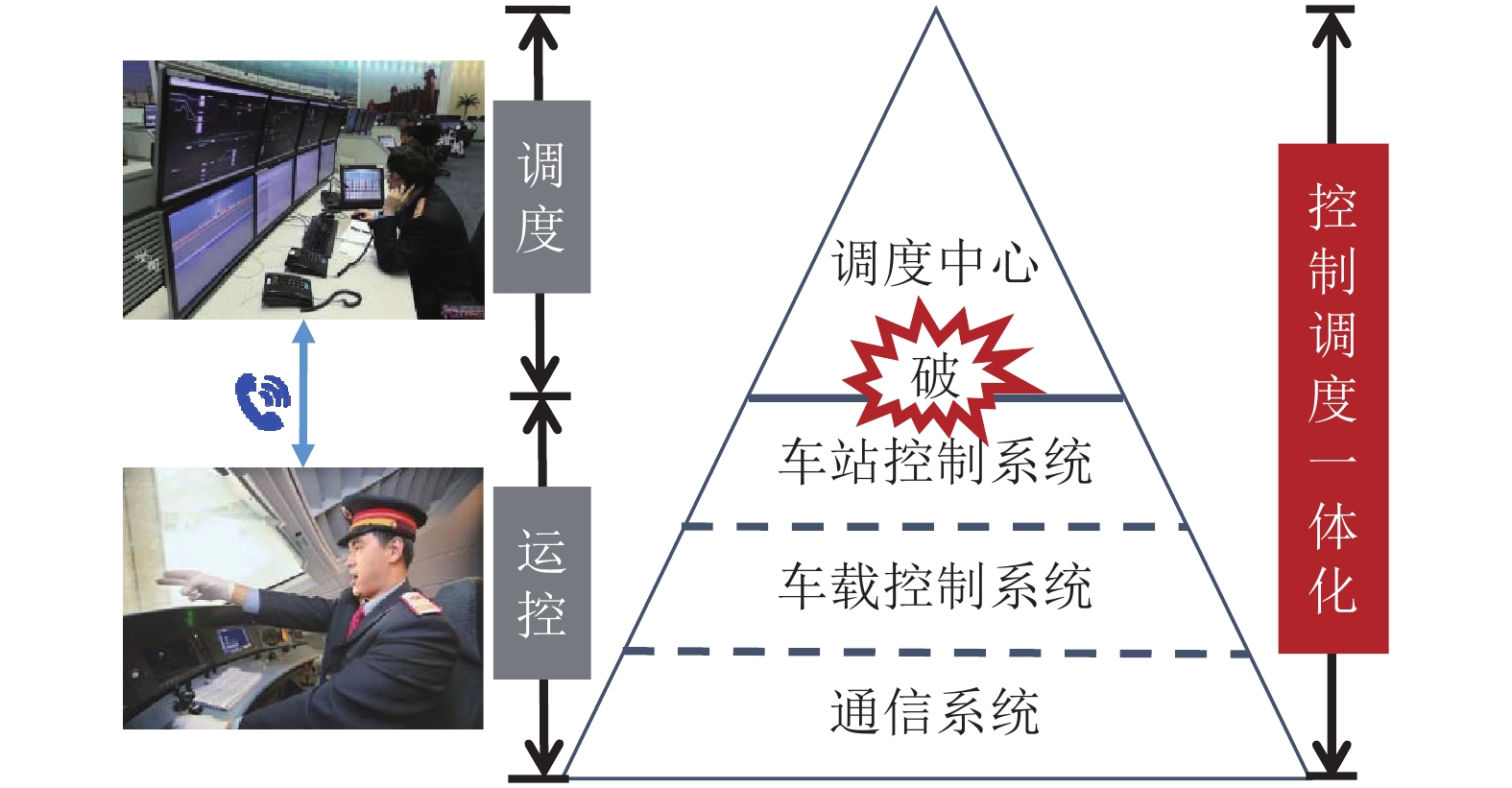
高速铁路运行控制系统是高速铁路的大脑和神经系统, 对列车的安全和高效运行至关重要. 随着我国高铁里程数和客运量的快速增加, 现有的控制手段和调度方法在快速、有效解决列车运行过程中出现的突发事件(比如电力故障、突发地震、山体滑坡、异物侵限等)方面尚有一定差距. 目前列车运行控制与调度采用分层架构, 突发情况下主要依赖调度员和司机的人工经验进行应急处置, 列车晚点时间较长, 旅客满意度不高. 因此, 如何针对高速列车运行过程中可能出现的突发事件, 提升其应急处置能力, 成为保障高铁安全高效运营的一大难题. 本文围绕高铁运行控制与动态调度一体化这一前沿研究热点, 对现有运行控制和动态调度的发展现状进行梳理, 在此基础上给出一体化的基本架构, 明确其基本内涵, 最后提出了未来的主要研究方向.
高速铁路运行控制系统是高速铁路的大脑和神经系统, 对列车的安全和高效运行至关重要. 随着我国高铁里程数和客运量的快速增加, 现有的控制手段和调度方法在快速、有效解决列车运行过程中出现的突发事件(比如电力故障、突发地震、山体滑坡、异物侵限等)方面尚有一定差距. 目前列车运行控制与调度采用分层架构, 突发情况下主要依赖调度员和司机的人工经验进行应急处置, 列车晚点时间较长, 旅客满意度不高. 因此, 如何针对高速列车运行过程中可能出现的突发事件, 提升其应急处置能力, 成为保障高铁安全高效运营的一大难题. 本文围绕高铁运行控制与动态调度一体化这一前沿研究热点, 对现有运行控制和动态调度的发展现状进行梳理, 在此基础上给出一体化的基本架构, 明确其基本内涵, 最后提出了未来的主要研究方向.

2019, 45(12): 2218-2232.
doi: 10.16383/j.aas.c190395
cstr: 32138.14.j.aas.c190395
摘要:
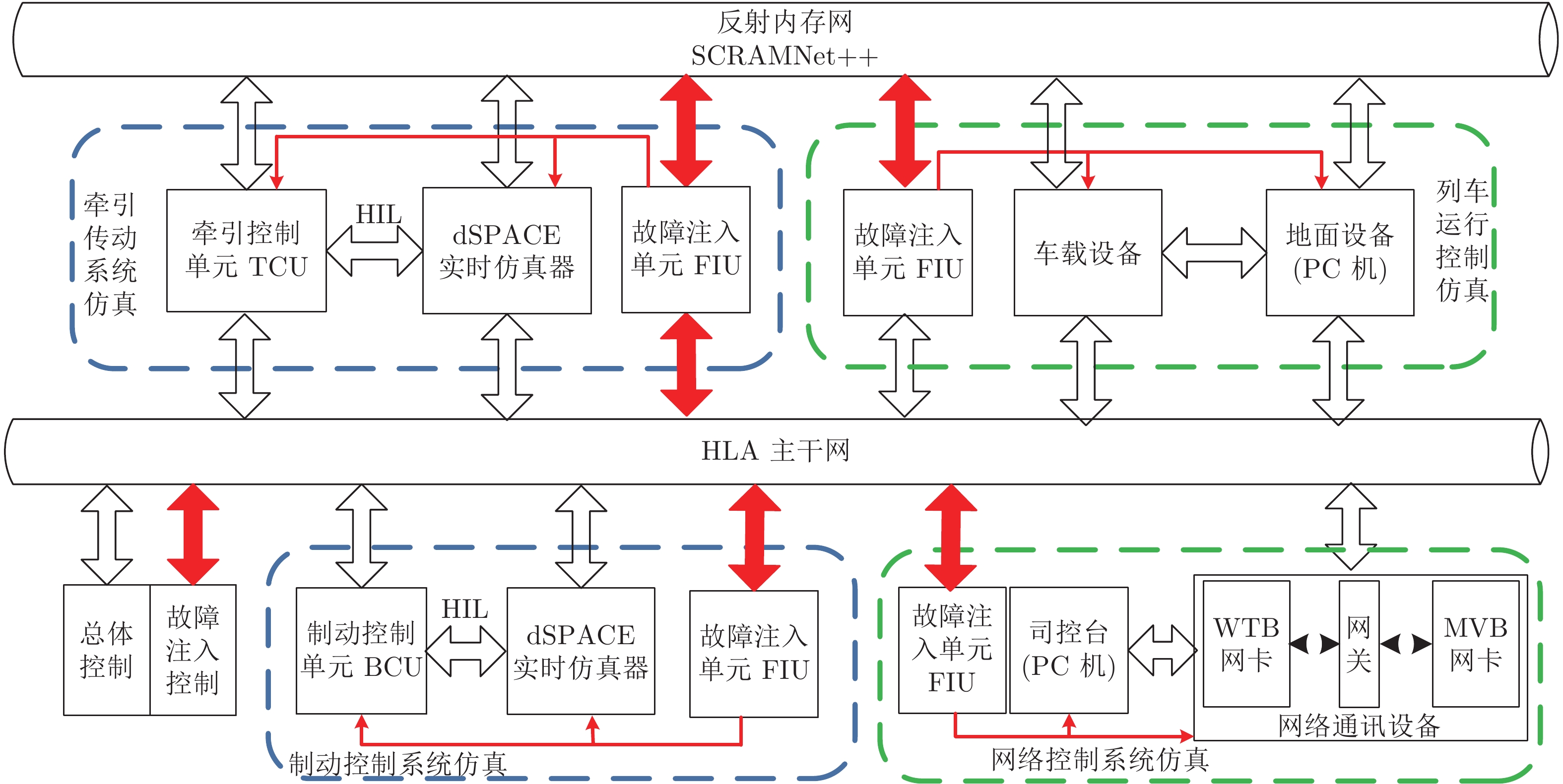
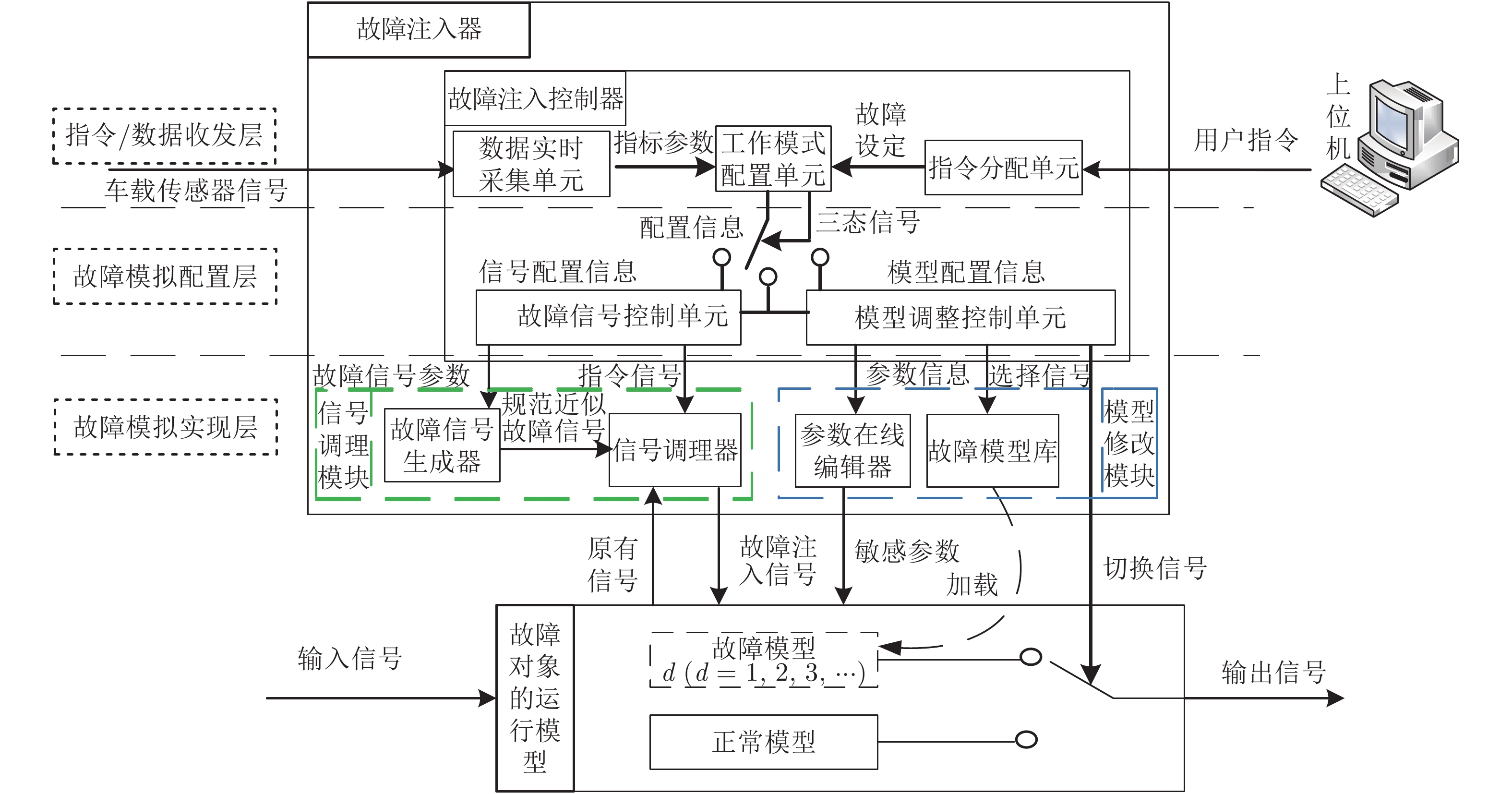
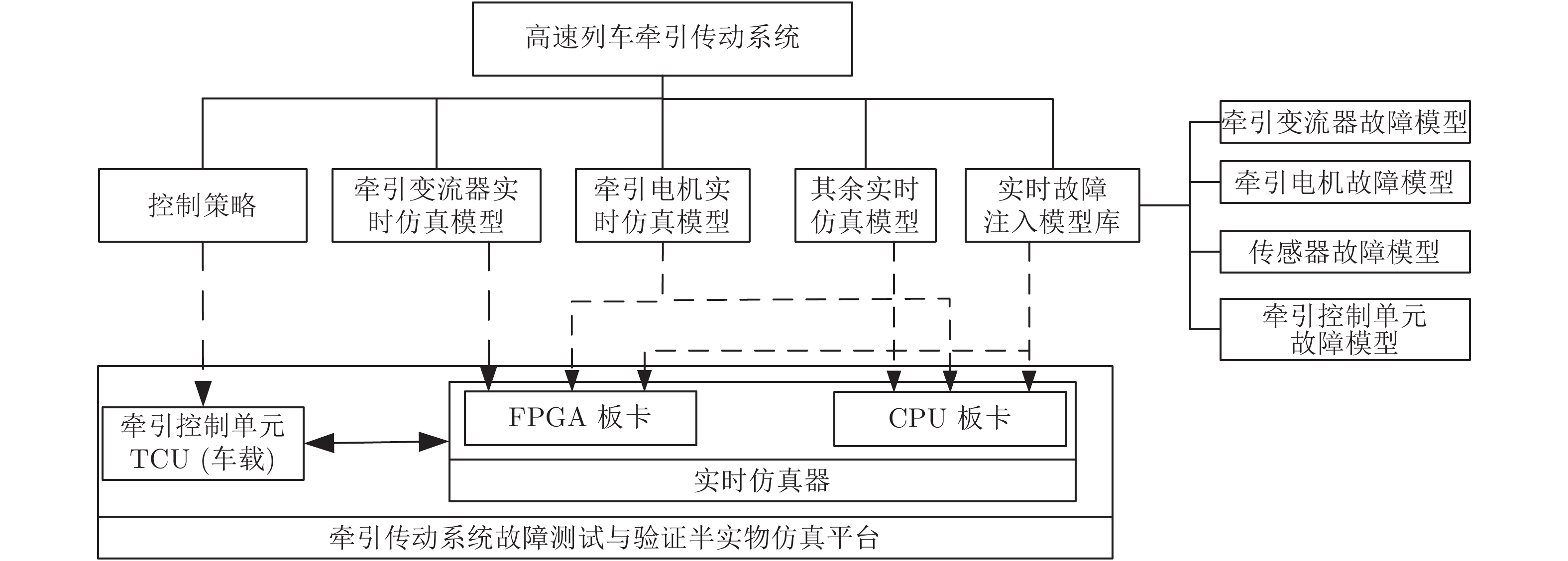
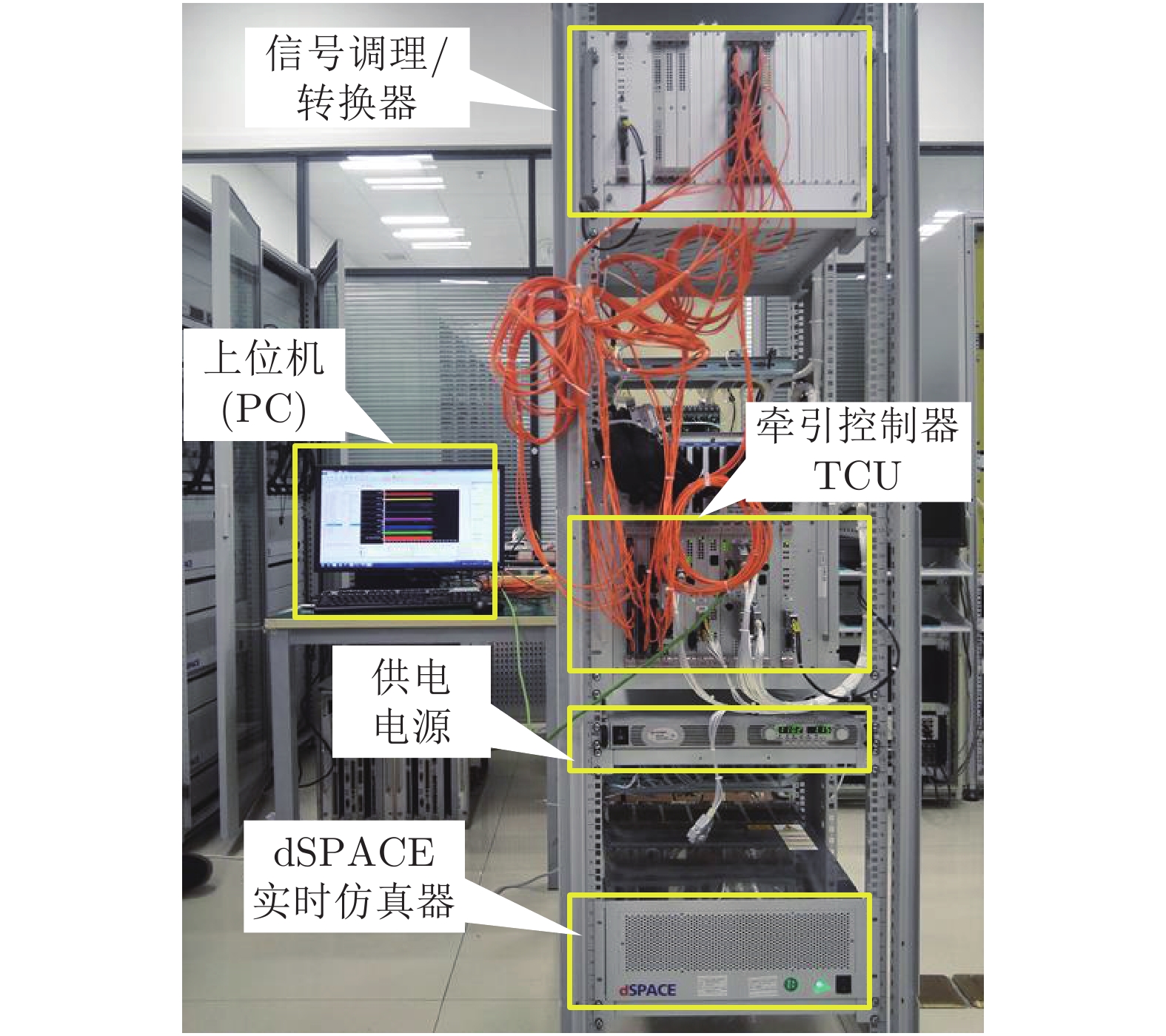
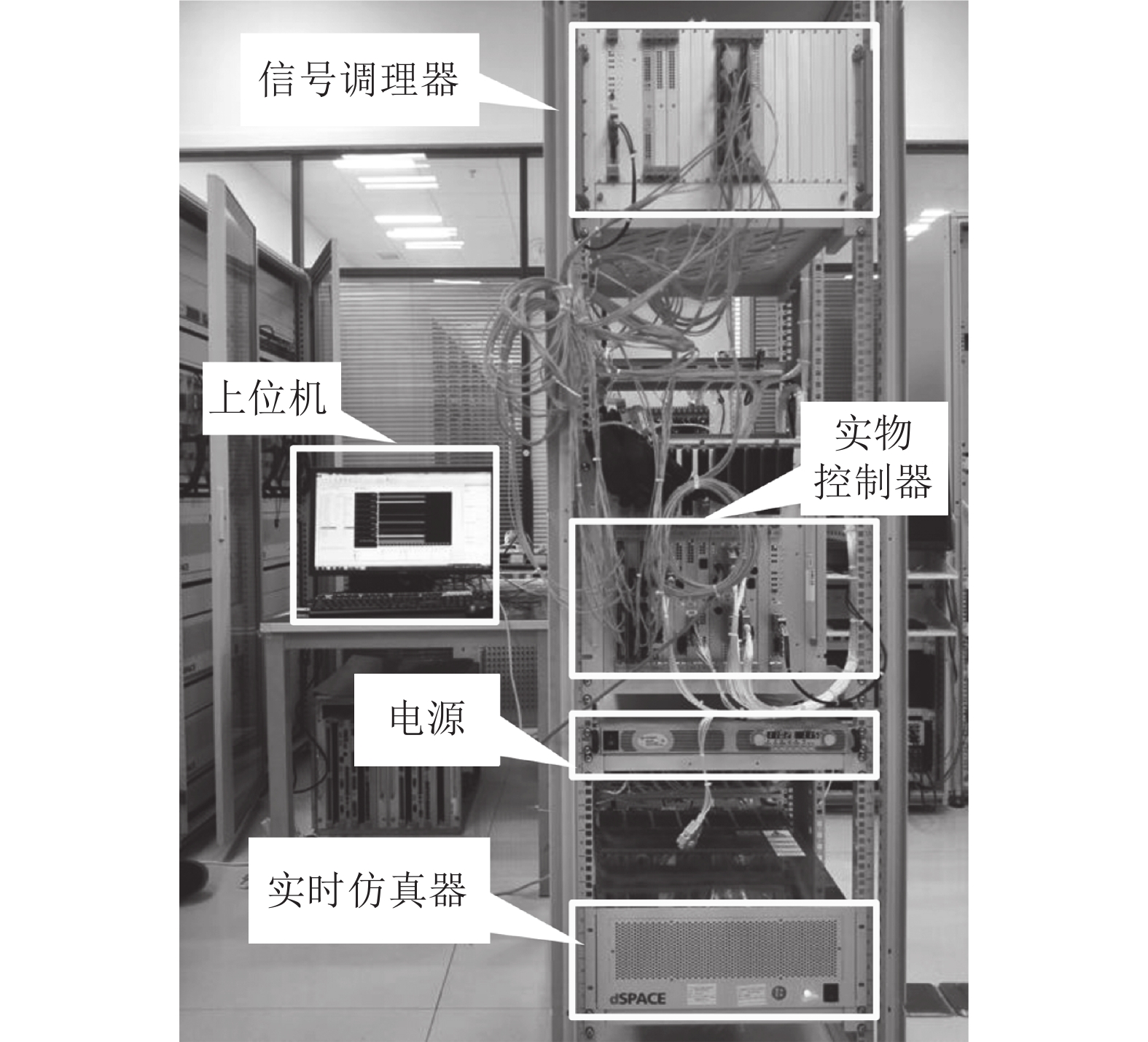
牵引传动系统作为高速列车能量传递与转换的核心部分, 是保障高铁安全稳定运行的关键系统之一. 故障测试与验证平台是确保实时故障诊断技术在高速列车上有效应用的重要手段和途径. 围绕高速列车牵引传动系统故障测试与验证平台中面临的挑战性问题和关键技术, 本文从故障注入、仿真可信度评估、算法性能评估和仿真平台实现等方法和技术方面进行分析, 并针对上述难题概述了一些解决方案, 提出并构建了一种集高速列车实时仿真、故障运行行为逼真模拟以及随机故障测试和故障诊断算法评估于一体的牵引传动系统故障测试与验证实时仿真平台. 最后, 总结展望了高速列车安全监测验证平台未来研究方向.
牵引传动系统作为高速列车能量传递与转换的核心部分, 是保障高铁安全稳定运行的关键系统之一. 故障测试与验证平台是确保实时故障诊断技术在高速列车上有效应用的重要手段和途径. 围绕高速列车牵引传动系统故障测试与验证平台中面临的挑战性问题和关键技术, 本文从故障注入、仿真可信度评估、算法性能评估和仿真平台实现等方法和技术方面进行分析, 并针对上述难题概述了一些解决方案, 提出并构建了一种集高速列车实时仿真、故障运行行为逼真模拟以及随机故障测试和故障诊断算法评估于一体的牵引传动系统故障测试与验证实时仿真平台. 最后, 总结展望了高速列车安全监测验证平台未来研究方向.





2019, 45(12): 2233-2241.
doi: 10.16383/j.aas.c190247
cstr: 32138.14.j.aas.c190247
摘要:
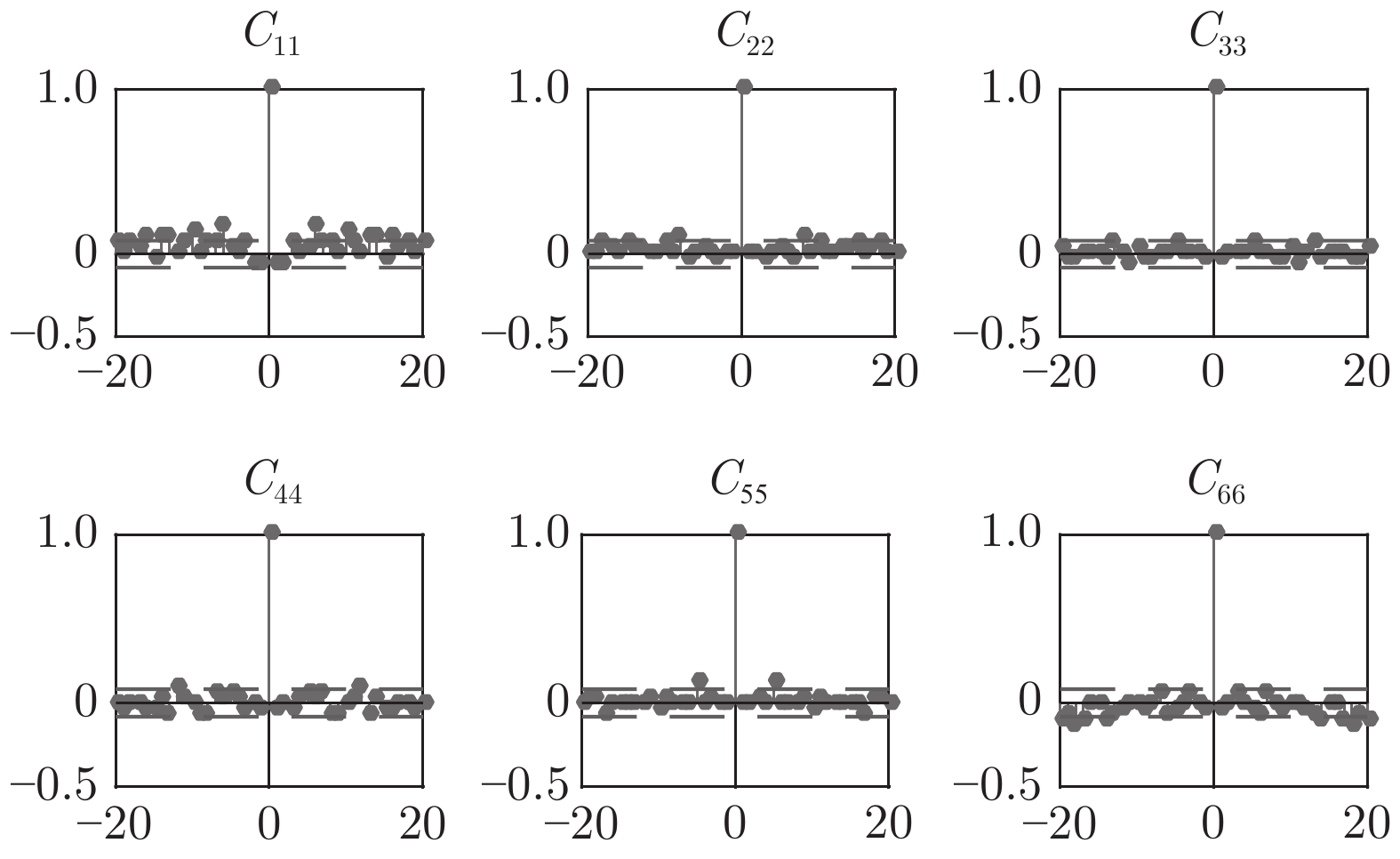
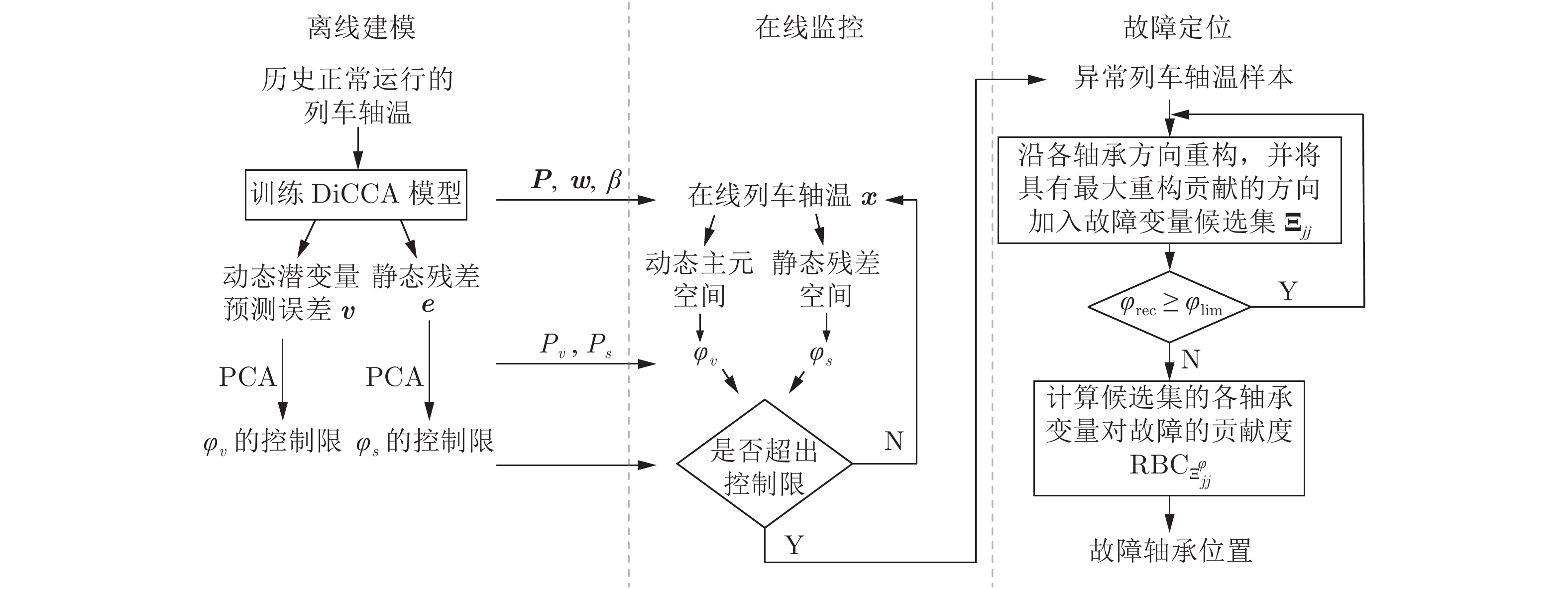
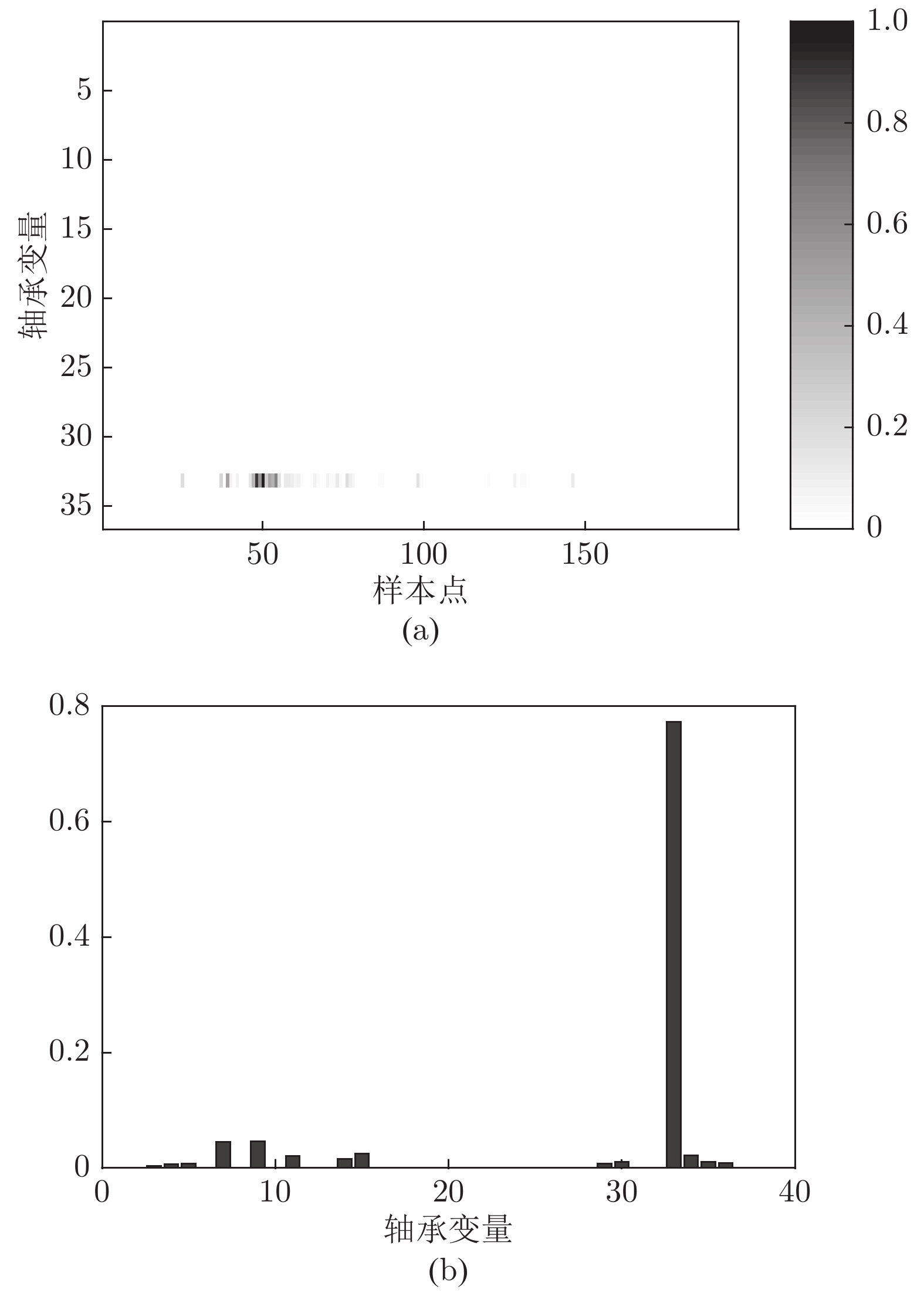
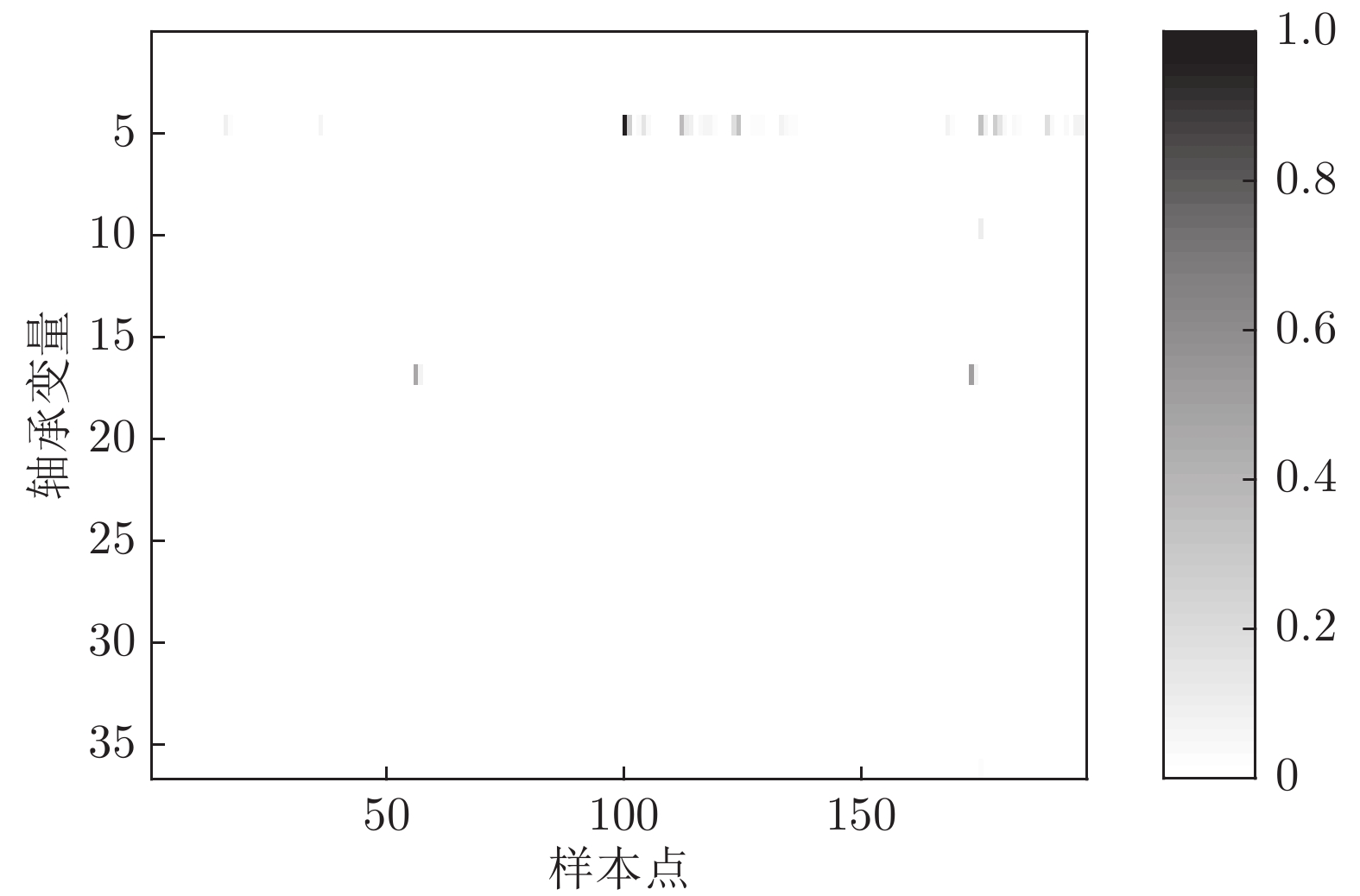
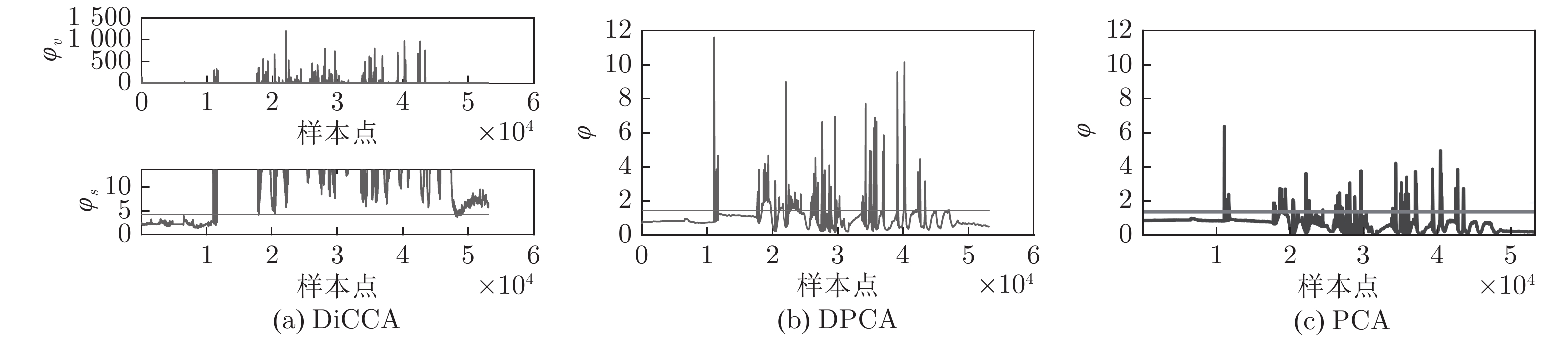
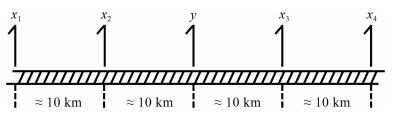
列车运行时轴承故障的检测与定位对于列车运行安全与健康维护至关重要. 现有的轴承故障报警系统主要是基于单一轴温变量的规则诊断, 报警不及时. 针对上述问题, 本文结合运行于相似环境和速度的同车多轴轴温的相关性及轴温动态性, 提出了一种数据驱动的基于多轴轴温动态潜结构的列车轴承故障检测与定位方法. 首先, 提出基于动态内在典型相关分析(Dynamic-inner canonical correlation analysis, DiCCA)的列车多轴轴温动态潜结构建模方法; 其次, 利用所建立的模型, 提出基于DiCCA综合指标的列车轴承故障检测方法; 在此基础上, 提出基于DiCCA多向重构的列车轴承故障定位方法. 利用某列车实际运行时的轴温数据进行验证, 结果表明了所提方法的有效性.
列车运行时轴承故障的检测与定位对于列车运行安全与健康维护至关重要. 现有的轴承故障报警系统主要是基于单一轴温变量的规则诊断, 报警不及时. 针对上述问题, 本文结合运行于相似环境和速度的同车多轴轴温的相关性及轴温动态性, 提出了一种数据驱动的基于多轴轴温动态潜结构的列车轴承故障检测与定位方法. 首先, 提出基于动态内在典型相关分析(Dynamic-inner canonical correlation analysis, DiCCA)的列车多轴轴温动态潜结构建模方法; 其次, 利用所建立的模型, 提出基于DiCCA综合指标的列车轴承故障检测方法; 在此基础上, 提出基于DiCCA多向重构的列车轴承故障定位方法. 利用某列车实际运行时的轴温数据进行验证, 结果表明了所提方法的有效性.







2019, 45(12): 2242-2250.
doi: 10.16383/j.aas.c190227
cstr: 32138.14.j.aas.c190227
摘要:
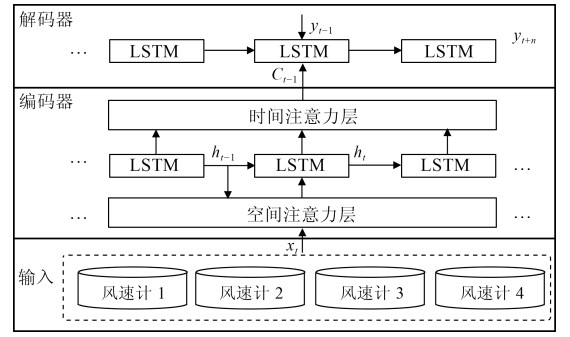
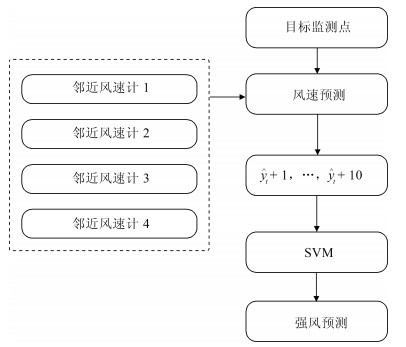
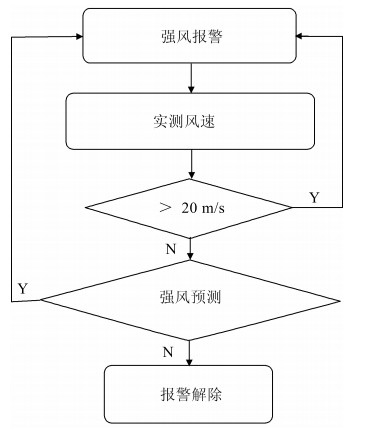
高速铁路在中国发展迅速,带来了全新的交通变革.较快的运行速度在带来效率提升的同时也增加了沿线强风对其运行安全的威胁.为了安全运行,铁路沿线部署了大量风速监测传感器,一旦监测到强风,将通过调度中心发出信号,调度沿线列车减速慢行甚至停车.在报警过程中,如何确定报警保持时间极具挑战.如果保持过短,则可能发生重复报警,增加处置次数,加重工作人员负担;若取消过晚,则影响轨道通过能力,带来不必要的效率损失.为此,本文提出一种高速铁路强风报警解除时间调整策略,用于改善这一问题.该策略通过轨道沿线部署的风速计装置,结合时空信息对短时未来强风情况进行预测,基于预测情况,自适应调整报警解除时间.该策略能够有效减少报警冗余时长,提高列车运行效率.
高速铁路在中国发展迅速,带来了全新的交通变革.较快的运行速度在带来效率提升的同时也增加了沿线强风对其运行安全的威胁.为了安全运行,铁路沿线部署了大量风速监测传感器,一旦监测到强风,将通过调度中心发出信号,调度沿线列车减速慢行甚至停车.在报警过程中,如何确定报警保持时间极具挑战.如果保持过短,则可能发生重复报警,增加处置次数,加重工作人员负担;若取消过晚,则影响轨道通过能力,带来不必要的效率损失.为此,本文提出一种高速铁路强风报警解除时间调整策略,用于改善这一问题.该策略通过轨道沿线部署的风速计装置,结合时空信息对短时未来强风情况进行预测,基于预测情况,自适应调整报警解除时间.该策略能够有效减少报警冗余时长,提高列车运行效率.

2019, 45(12): 2251-2259.
doi: 10.16383/j.aas.c190188
cstr: 32138.14.j.aas.c190188
摘要:
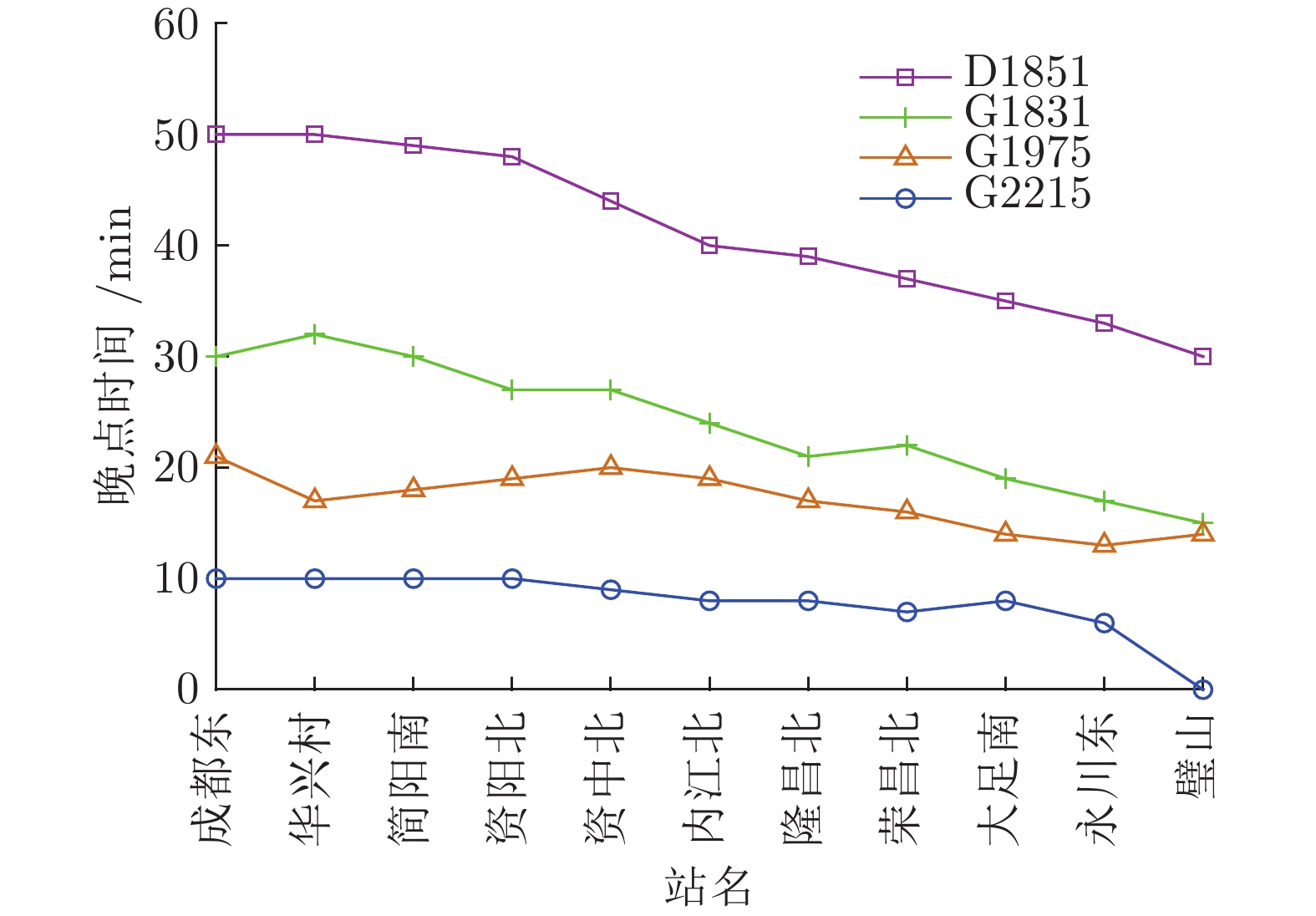
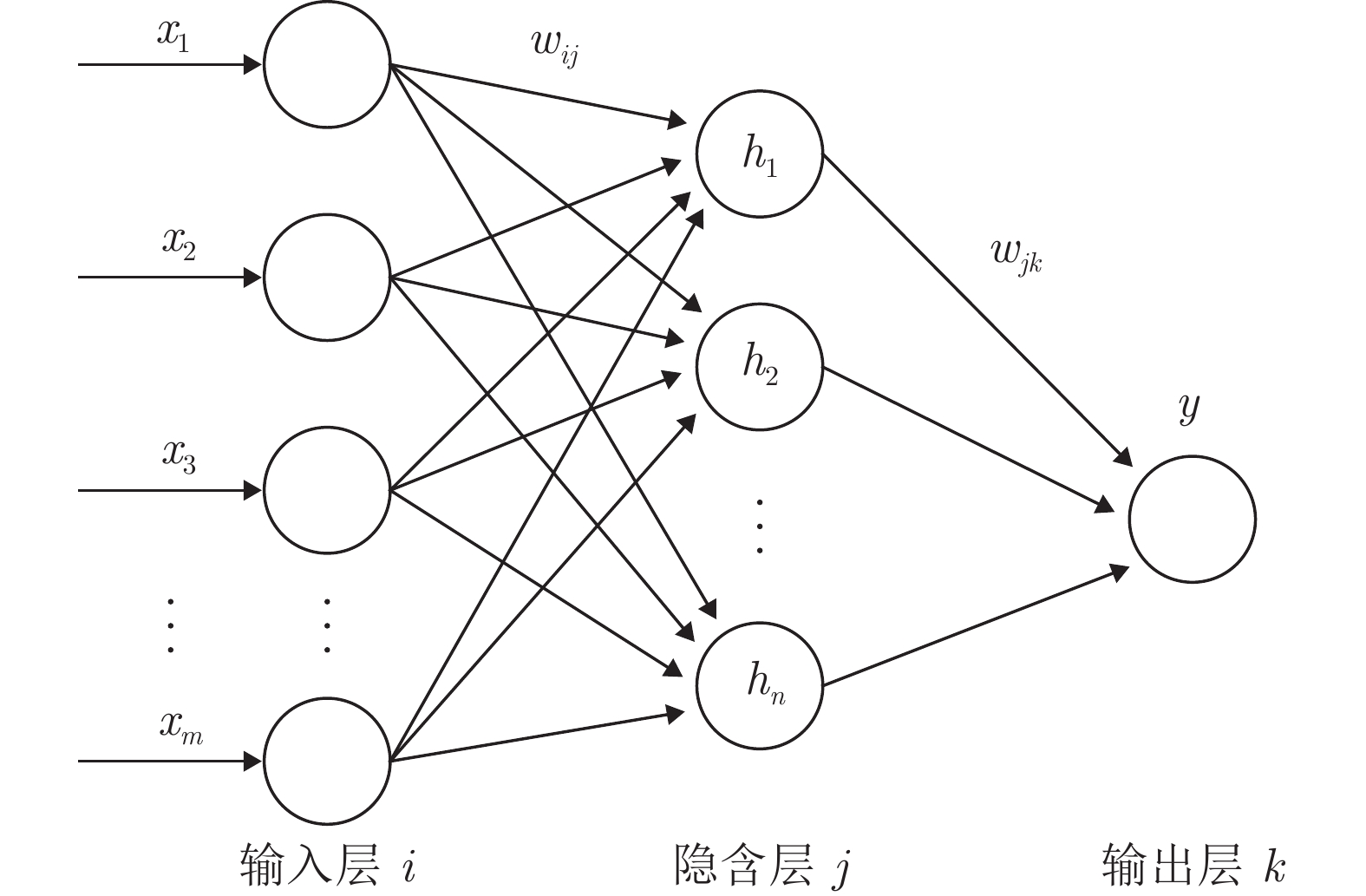
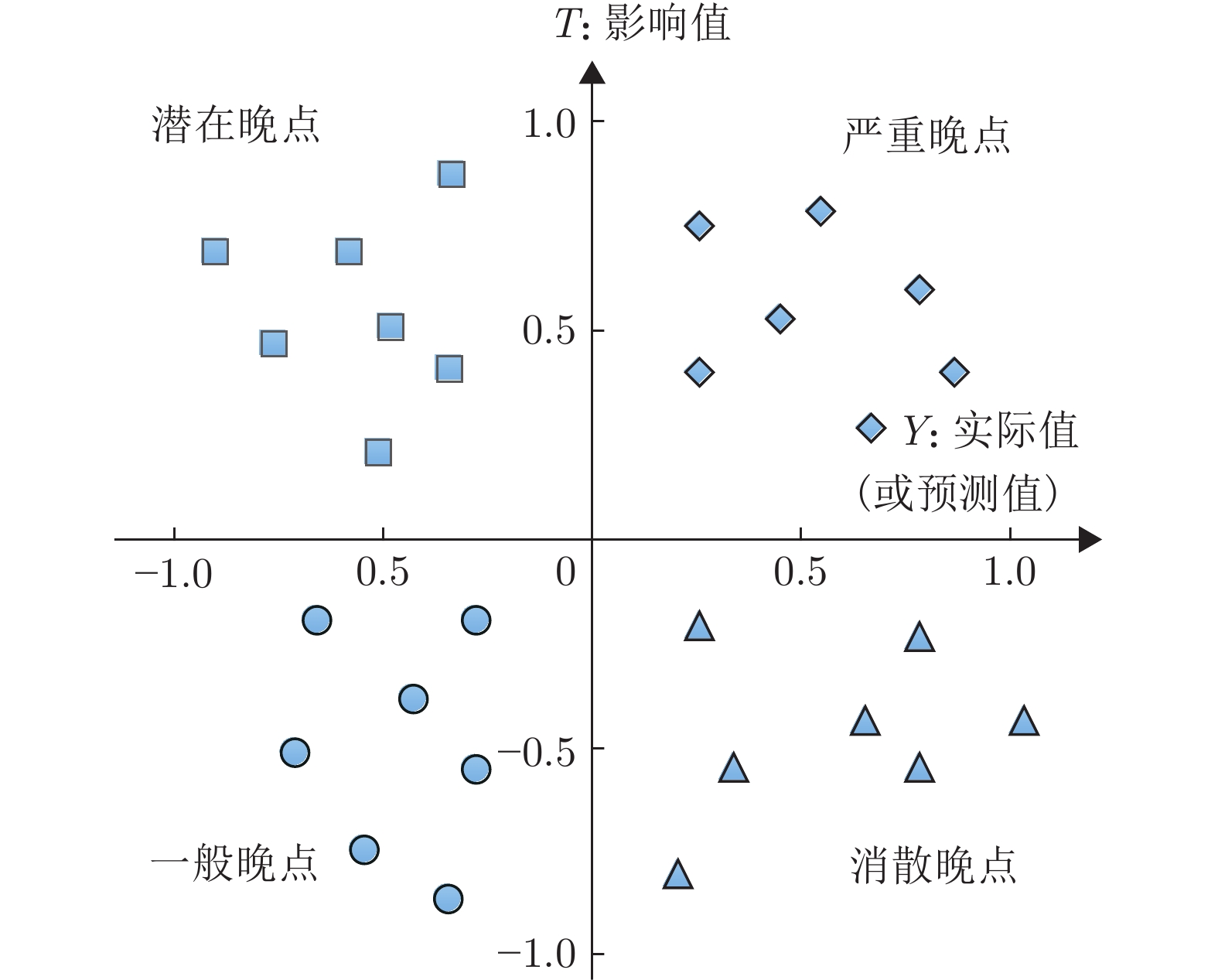
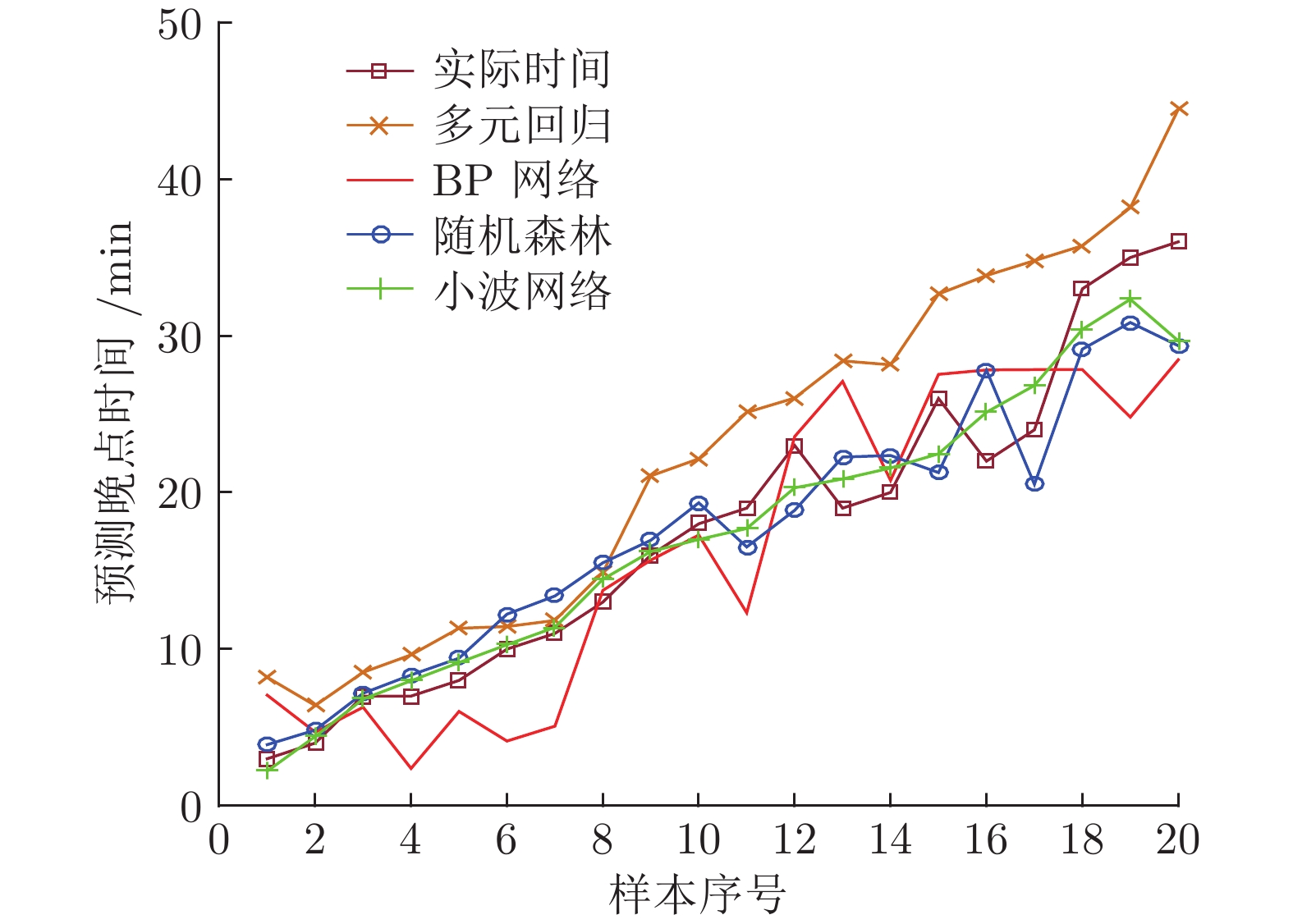
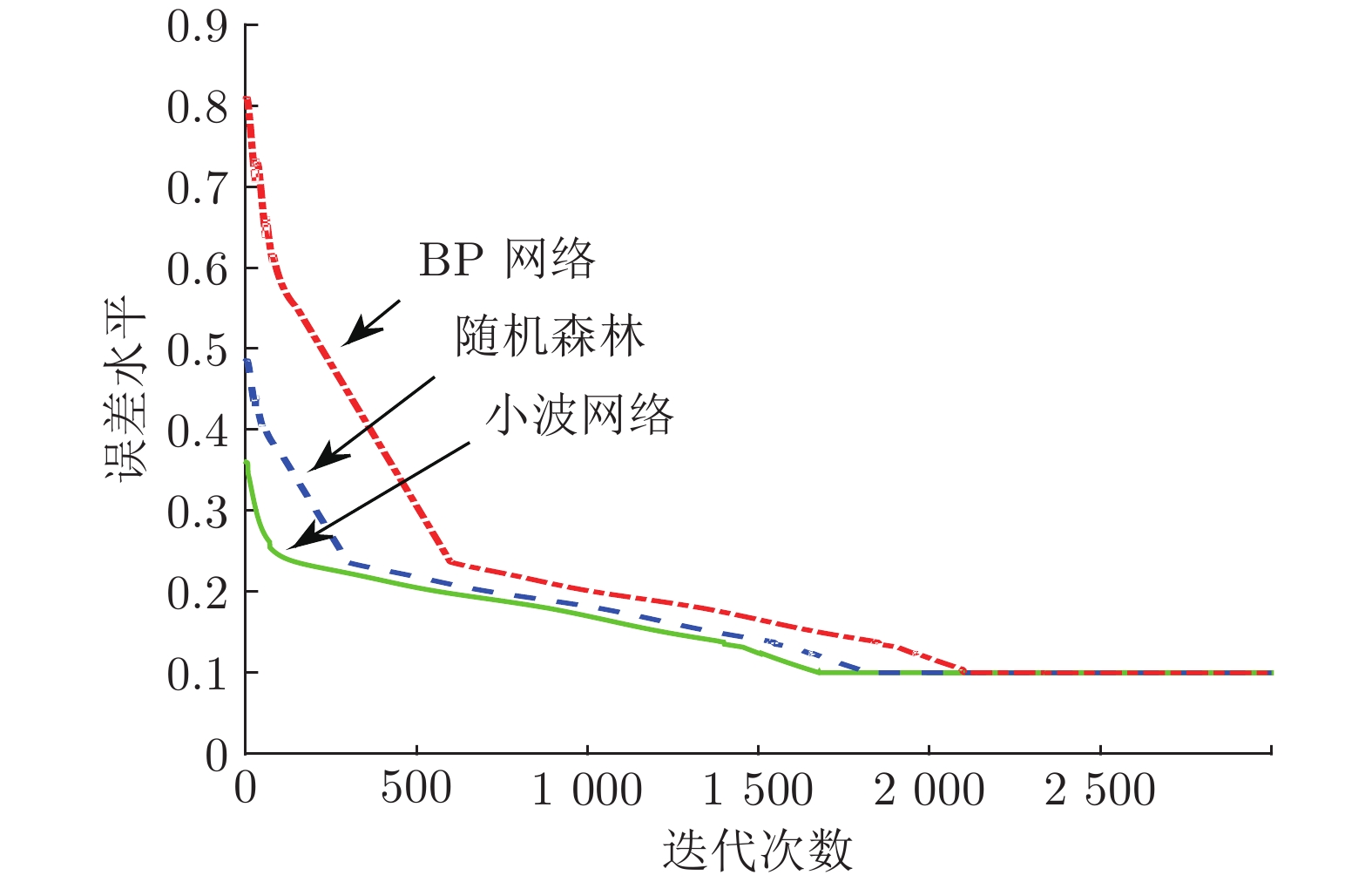
列车晚点预测及分析直接服务于高速铁路调度指挥, 是列车晚点研究的重点内容. 通过对列车晚点传播结构及传播规律的分析, 提出了一种高速铁路列车连带晚点的智能预测及特征识别方法. 首先利用列车晚点自身传播及相邻线列车晚点传播的关系, 构建基于小波神经网络的列车连带晚点递阶预测模型; 然后利用列车晚点波动的线性组合方程及其结构向量, 进行列车连带晚点影响值的量化; 最后综合连带晚点的实际值、预测值和影响值, 将晚点分为严重晚点、消散晚点、潜在晚点、一般晚点四种类型. 成渝高铁的实例数据表明, 小波神经网络的预测结果具有较高精度, 连带晚点的分类结果也比较符合实际, 能够为高速铁路列车连带晚点的运行调整提供数据支撑.
列车晚点预测及分析直接服务于高速铁路调度指挥, 是列车晚点研究的重点内容. 通过对列车晚点传播结构及传播规律的分析, 提出了一种高速铁路列车连带晚点的智能预测及特征识别方法. 首先利用列车晚点自身传播及相邻线列车晚点传播的关系, 构建基于小波神经网络的列车连带晚点递阶预测模型; 然后利用列车晚点波动的线性组合方程及其结构向量, 进行列车连带晚点影响值的量化; 最后综合连带晚点的实际值、预测值和影响值, 将晚点分为严重晚点、消散晚点、潜在晚点、一般晚点四种类型. 成渝高铁的实例数据表明, 小波神经网络的预测结果具有较高精度, 连带晚点的分类结果也比较符合实际, 能够为高速铁路列车连带晚点的运行调整提供数据支撑.



2019, 45(12): 2260-2267.
doi: 10.16383/j.aas.c190193
cstr: 32138.14.j.aas.c190193
摘要:
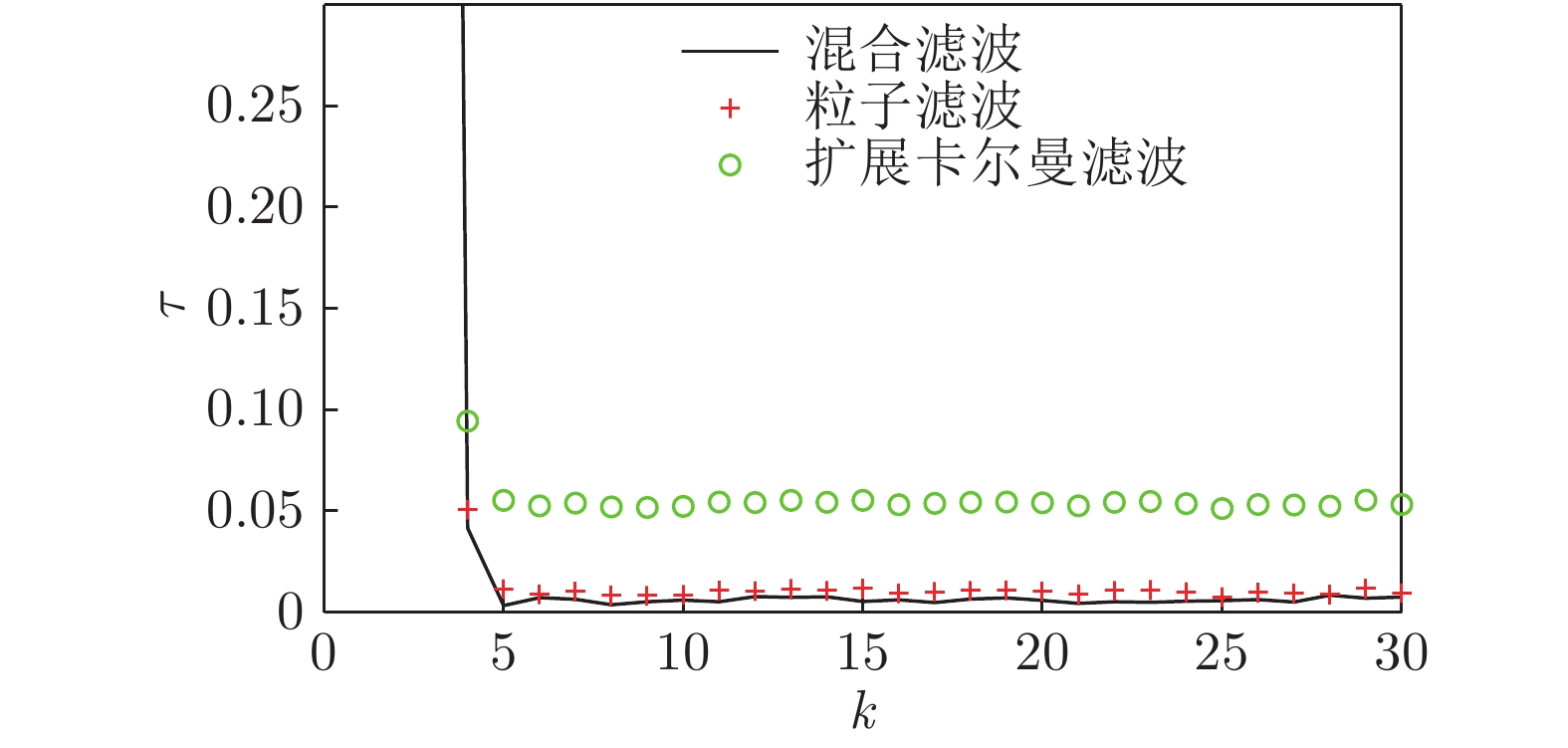
针对高速列车非线性单质点模型的特殊结构及含有隐含变量问题, 提出一种基于混合滤波的最大期望辨识方法. 借助递阶辨识理论, 将高铁列车状态空间模型分解为线性子系统模型和非线性子系统模型. 进而, 分别利用卡尔曼滤波和粒子滤波对速度和位移状态进行联合估计. 最后, 使用最大期望方法辨识高铁列车子系统模型参数, 解决了隐含变量辨识问题. 和传统方法相比, 本文所提出方法计算量小, 且具有较高的辨识精度. 仿真对比实验结果验证了该方法的有效性.
针对高速列车非线性单质点模型的特殊结构及含有隐含变量问题, 提出一种基于混合滤波的最大期望辨识方法. 借助递阶辨识理论, 将高铁列车状态空间模型分解为线性子系统模型和非线性子系统模型. 进而, 分别利用卡尔曼滤波和粒子滤波对速度和位移状态进行联合估计. 最后, 使用最大期望方法辨识高铁列车子系统模型参数, 解决了隐含变量辨识问题. 和传统方法相比, 本文所提出方法计算量小, 且具有较高的辨识精度. 仿真对比实验结果验证了该方法的有效性.


2019, 45(12): 2268-2280.
doi: 10.16383/j.aas.c190215
cstr: 32138.14.j.aas.c190215
摘要:
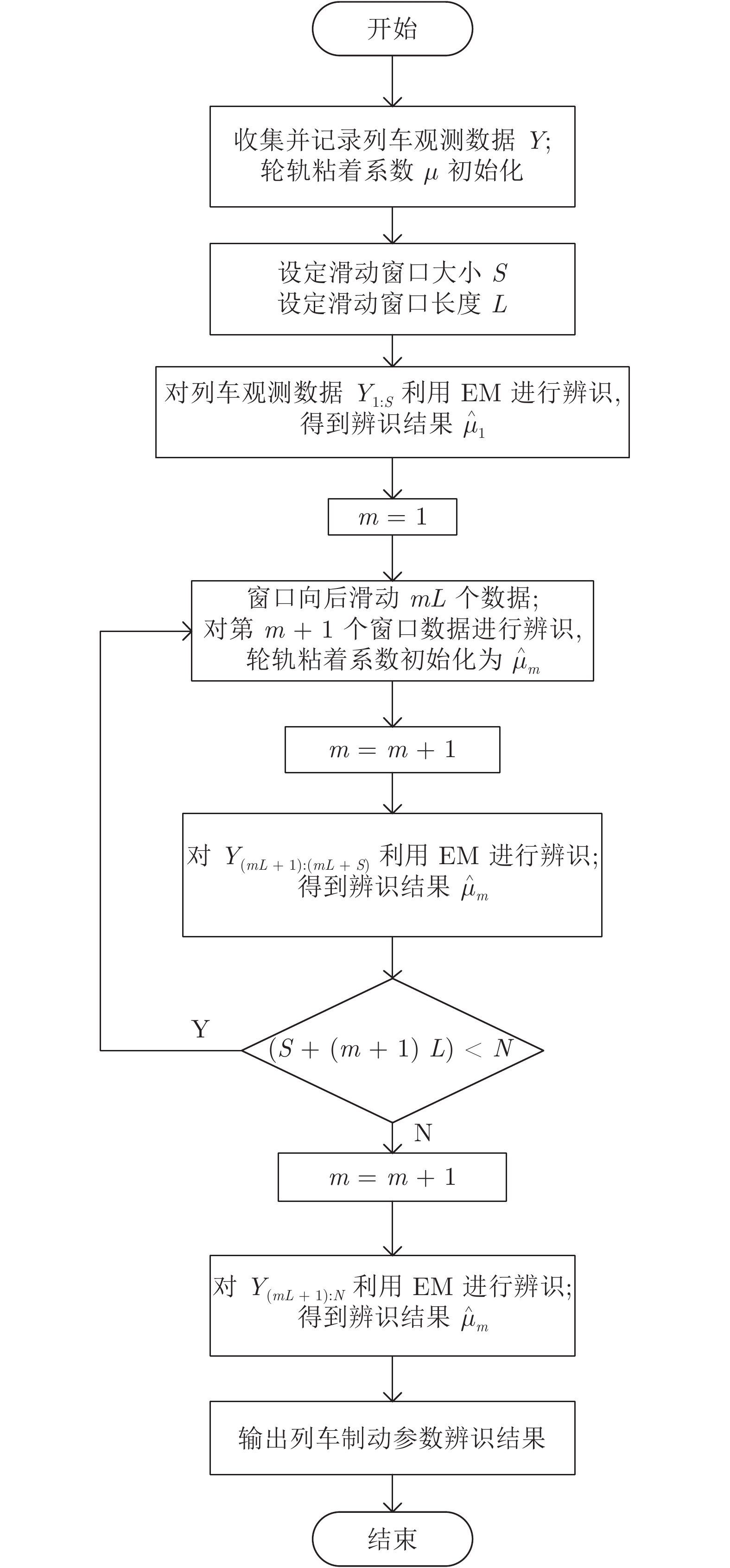
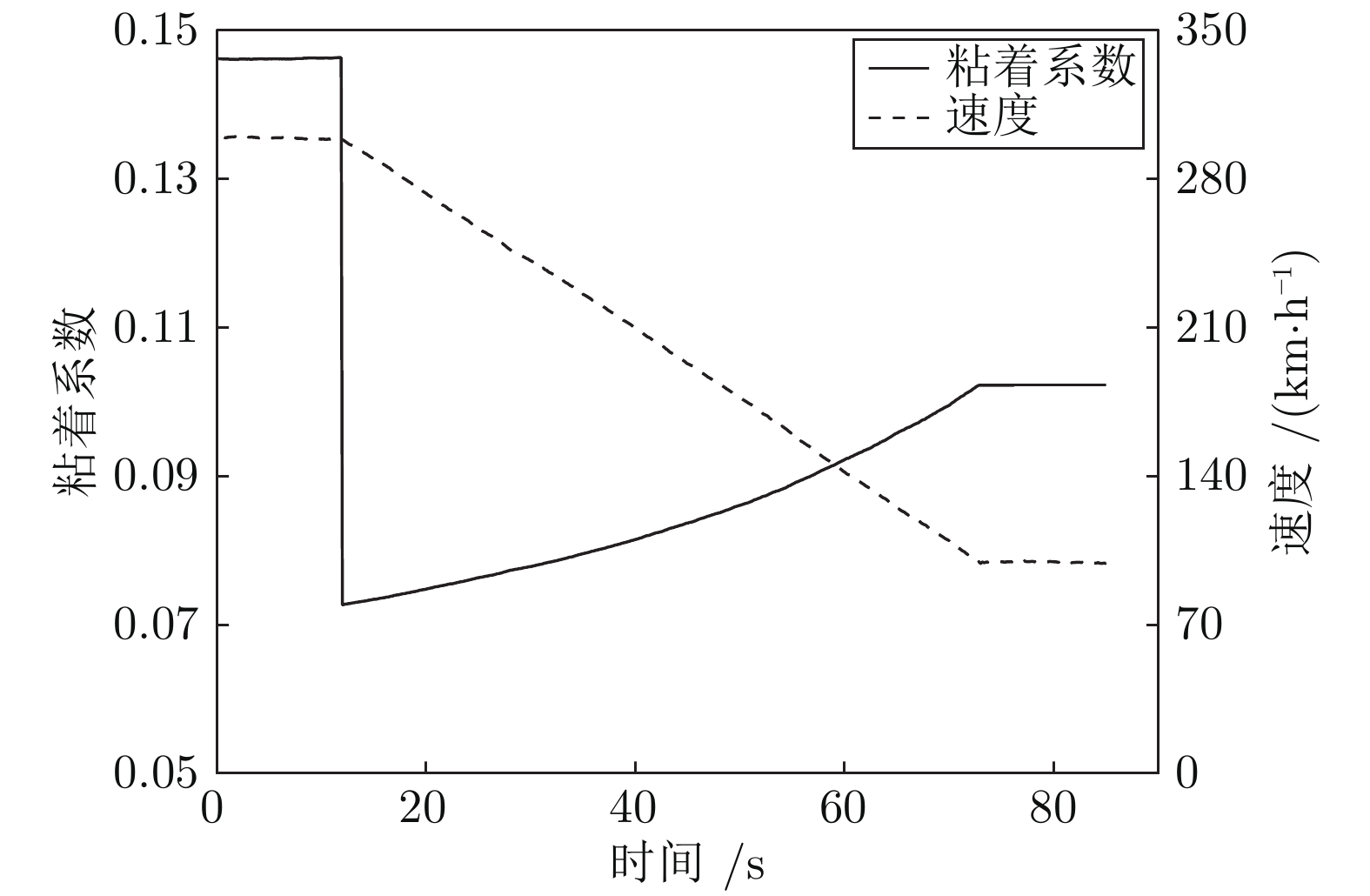
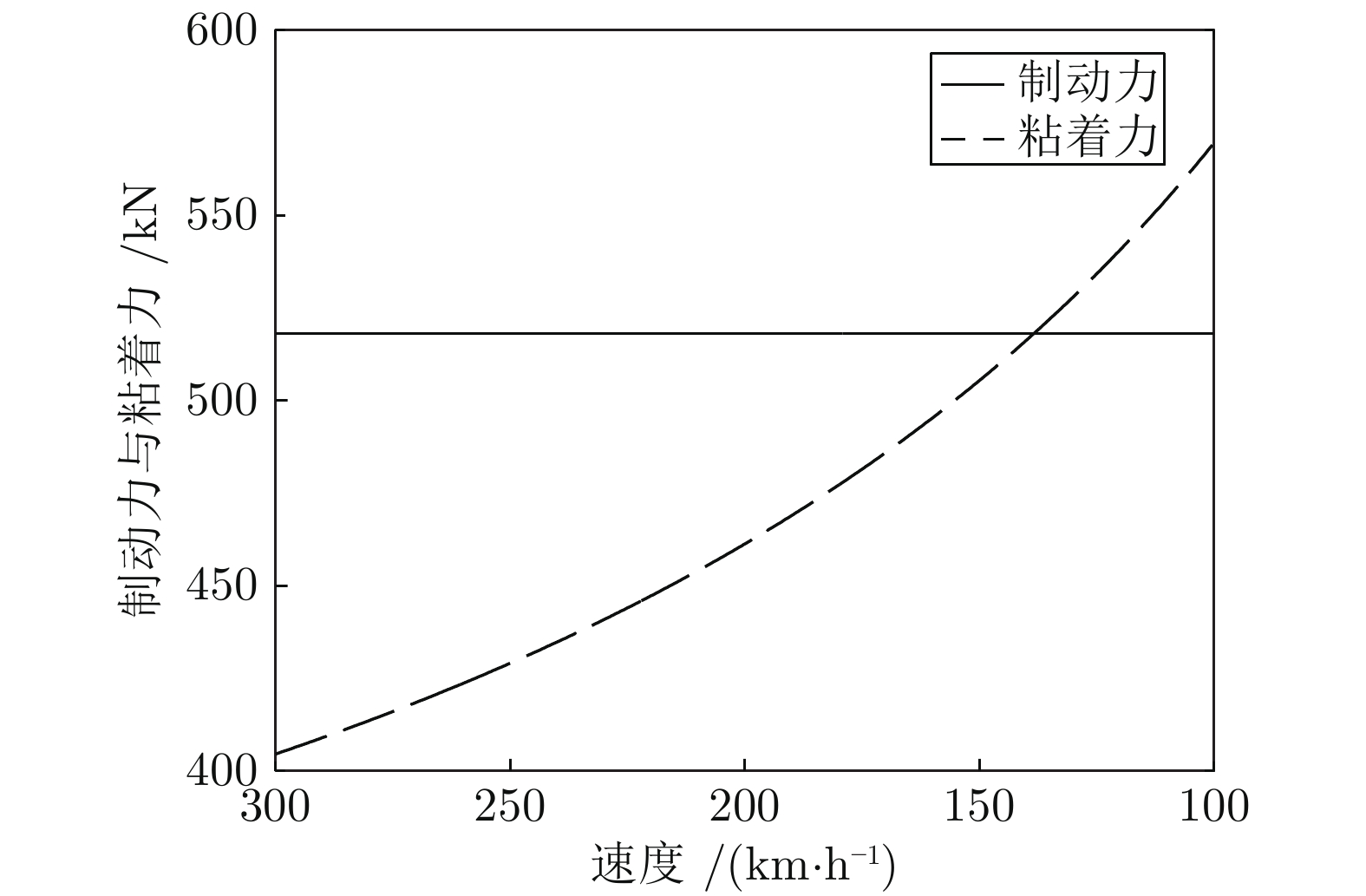
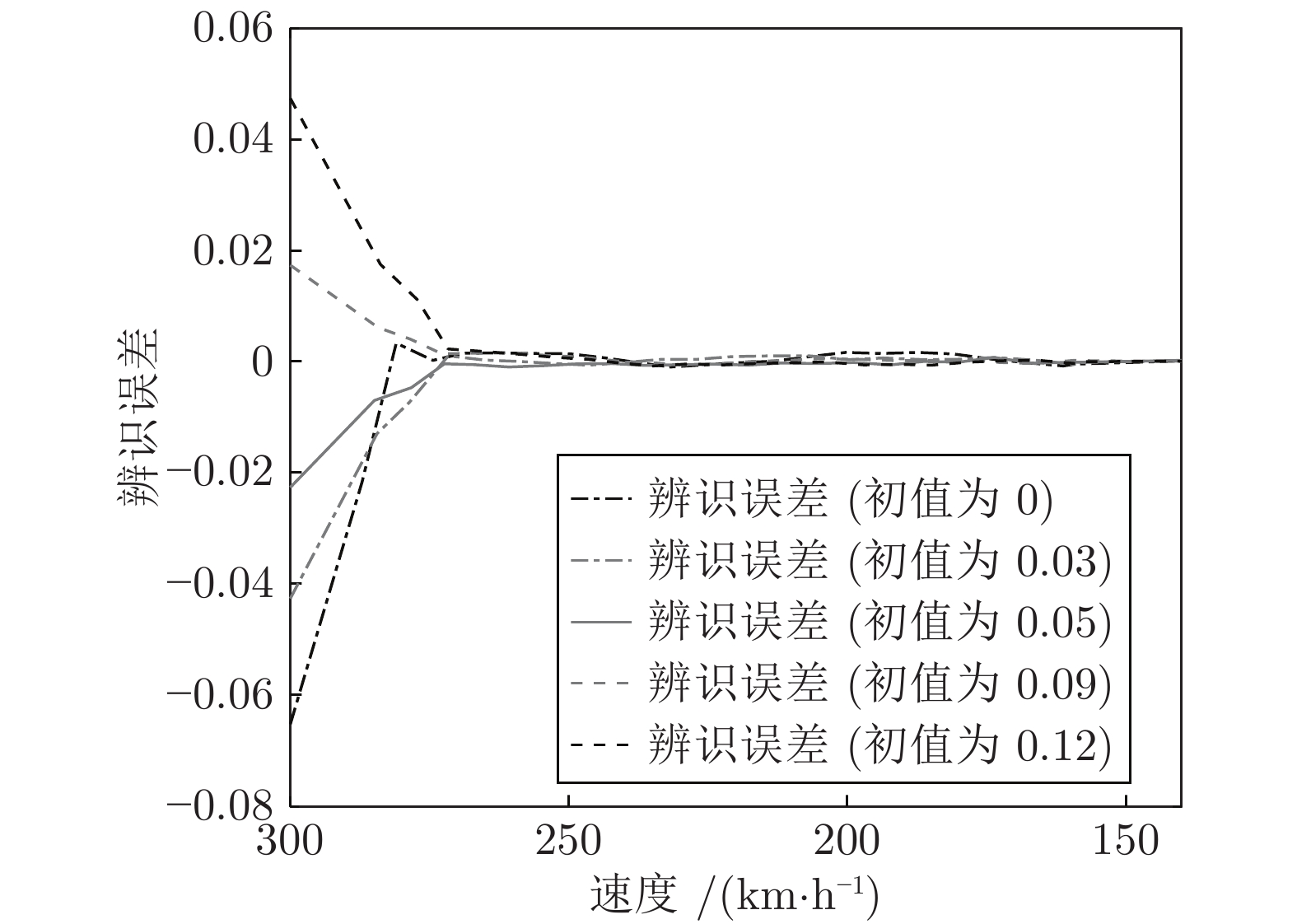
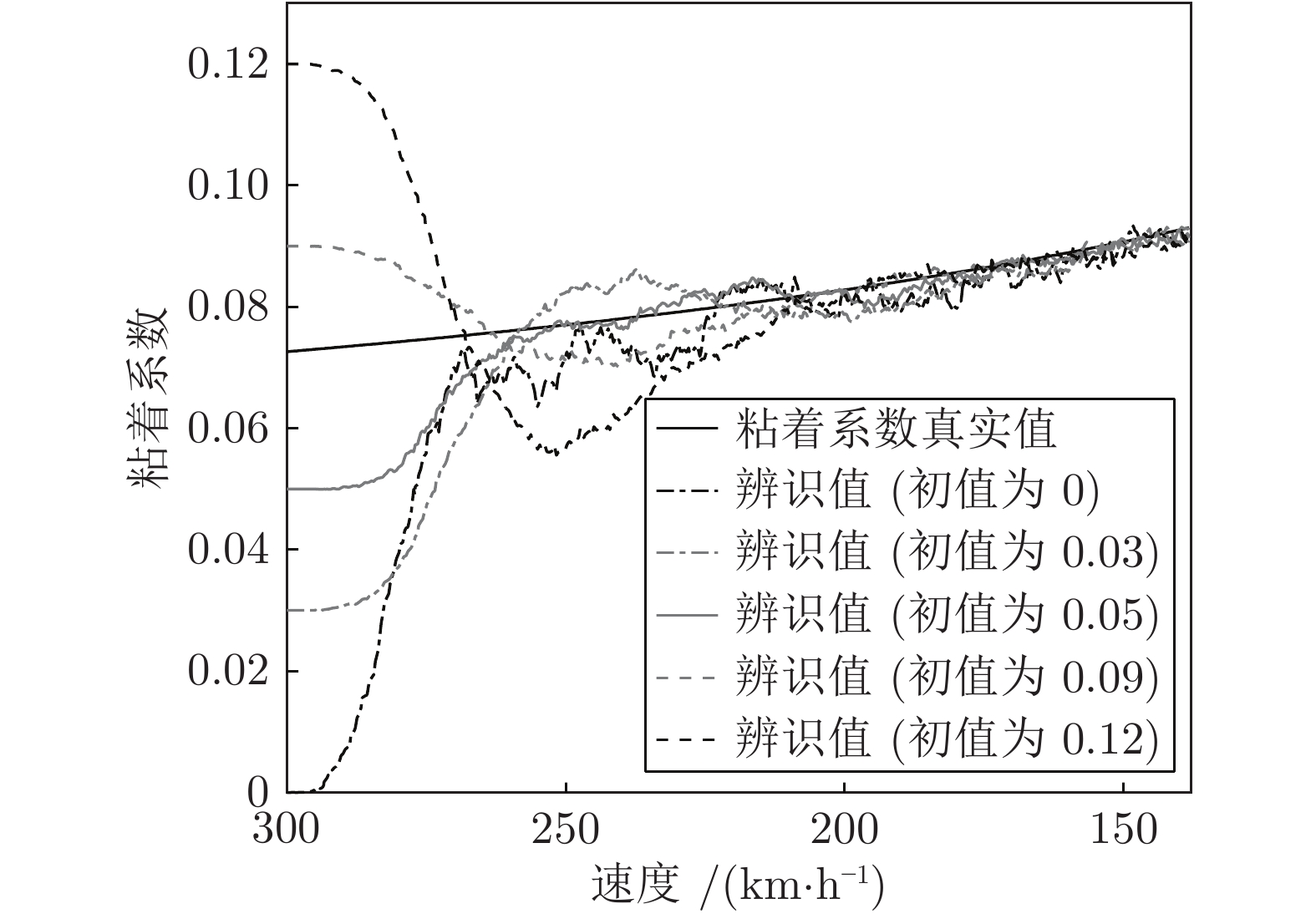
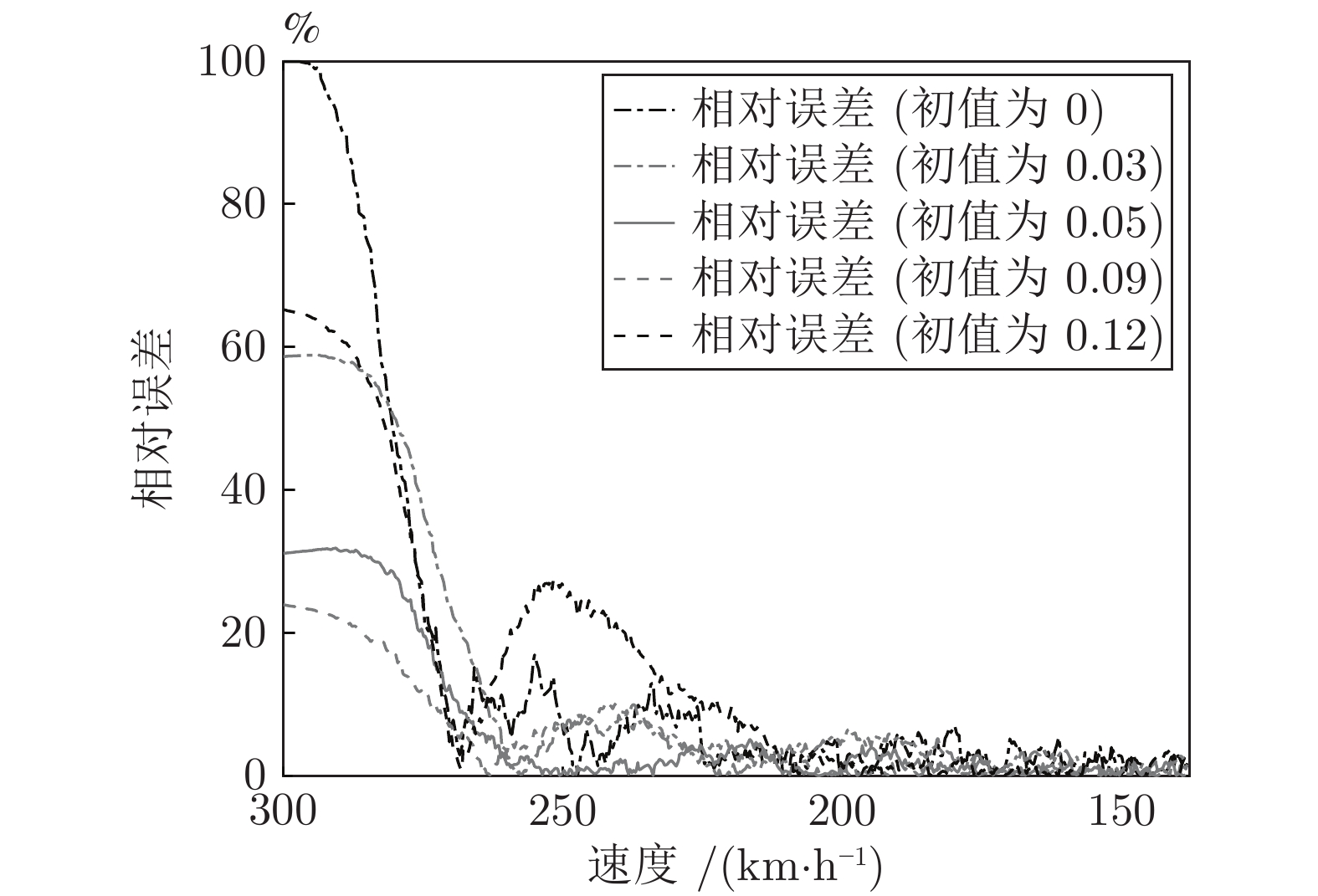
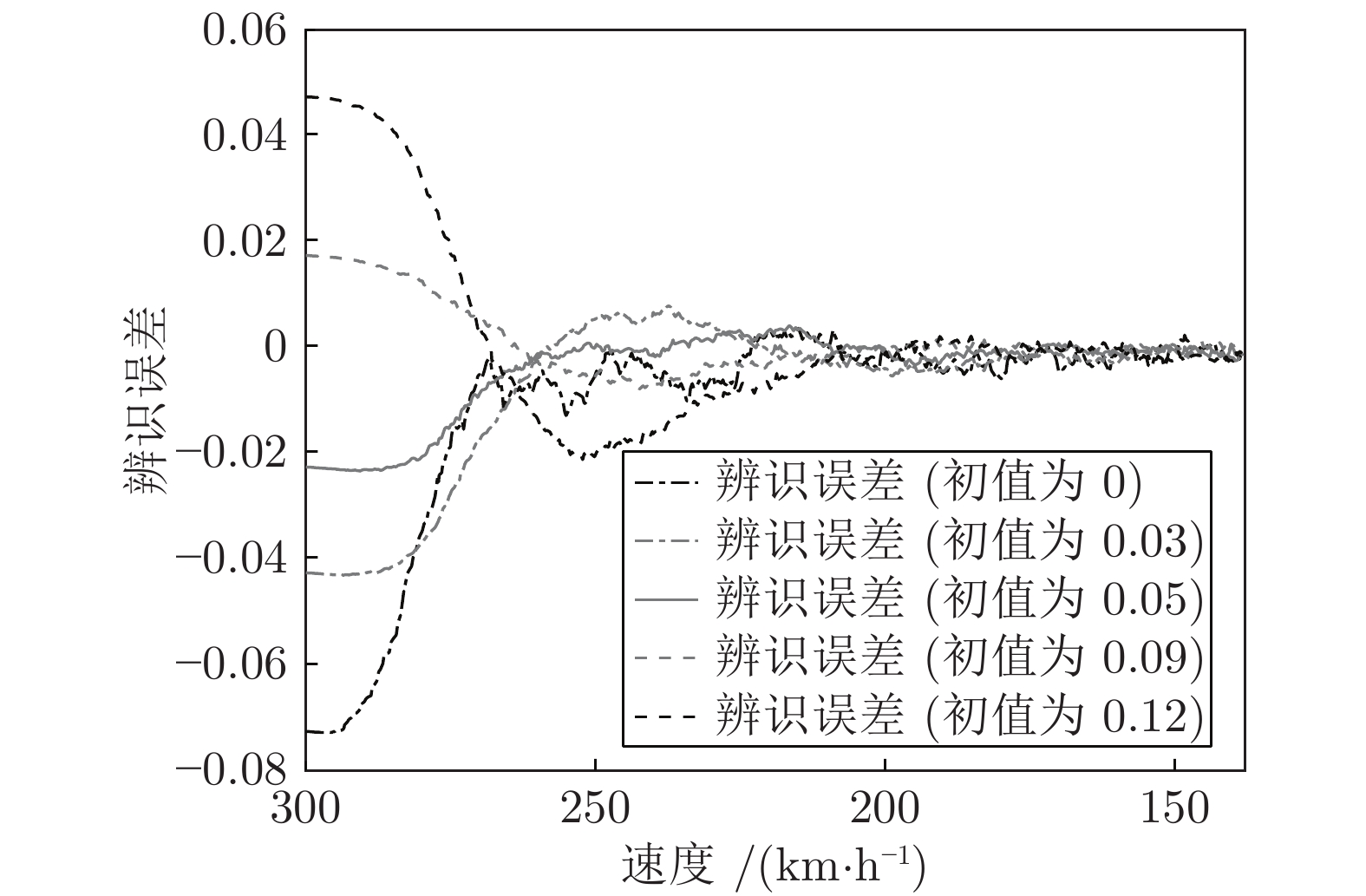
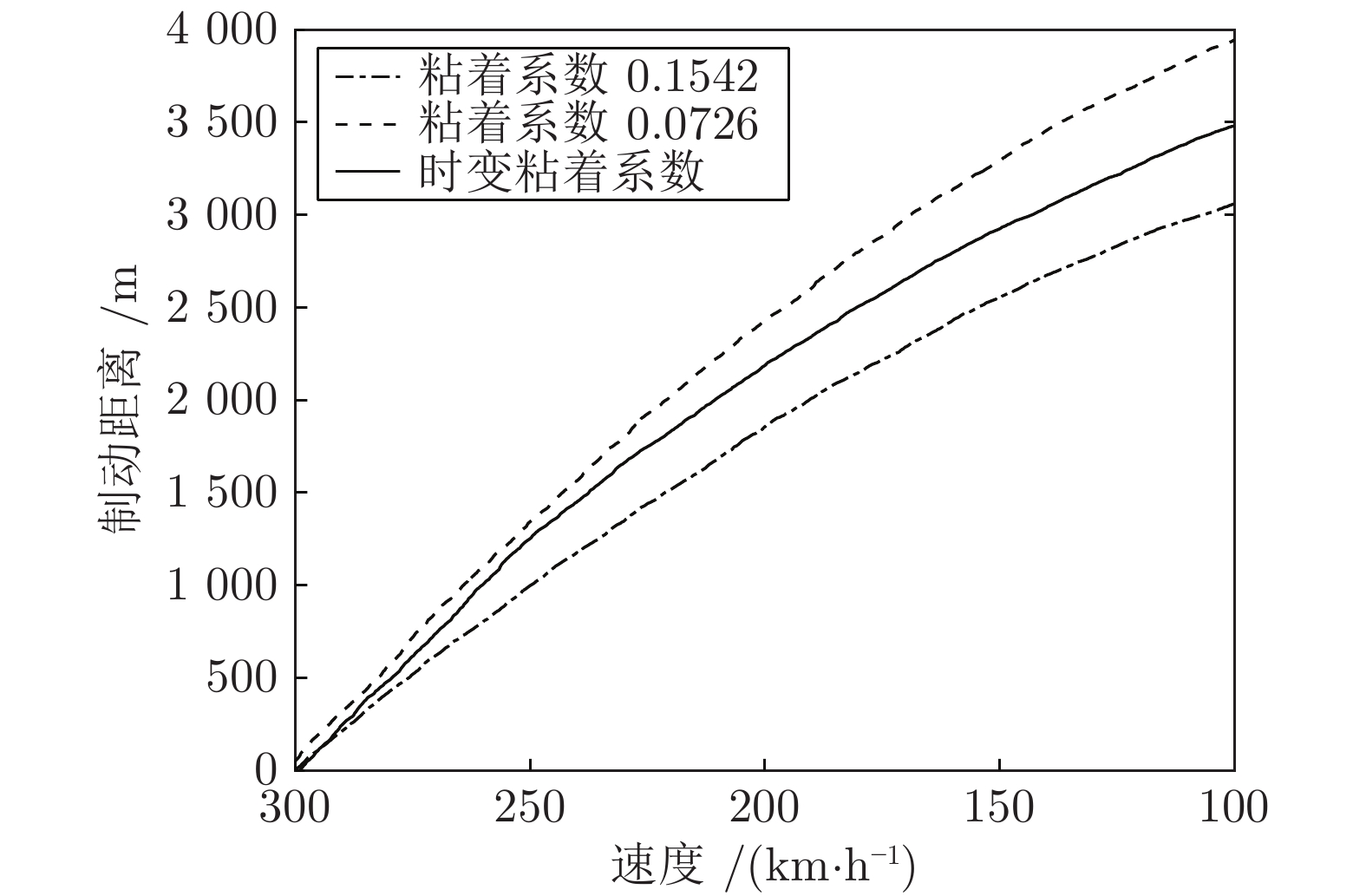
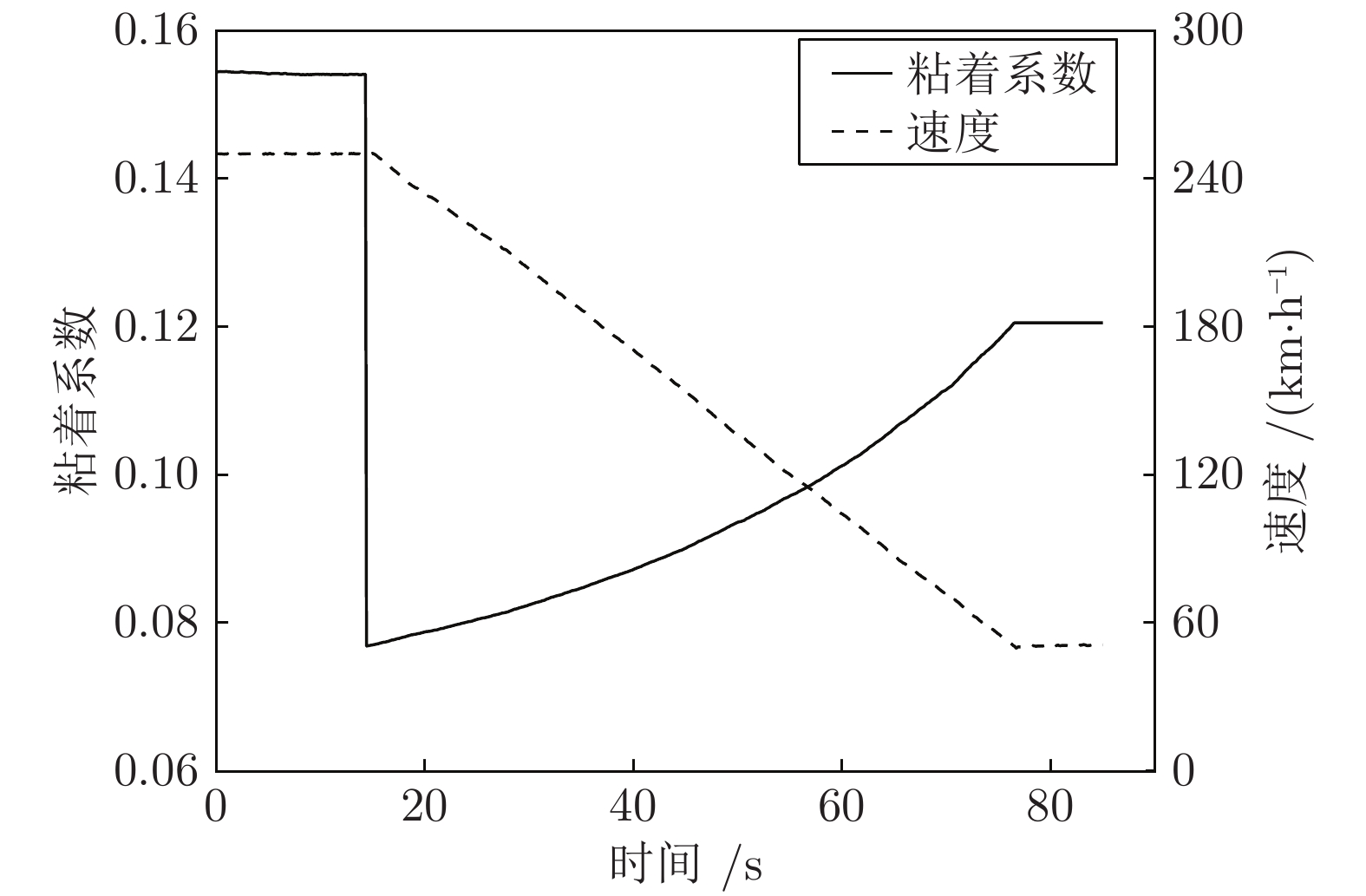
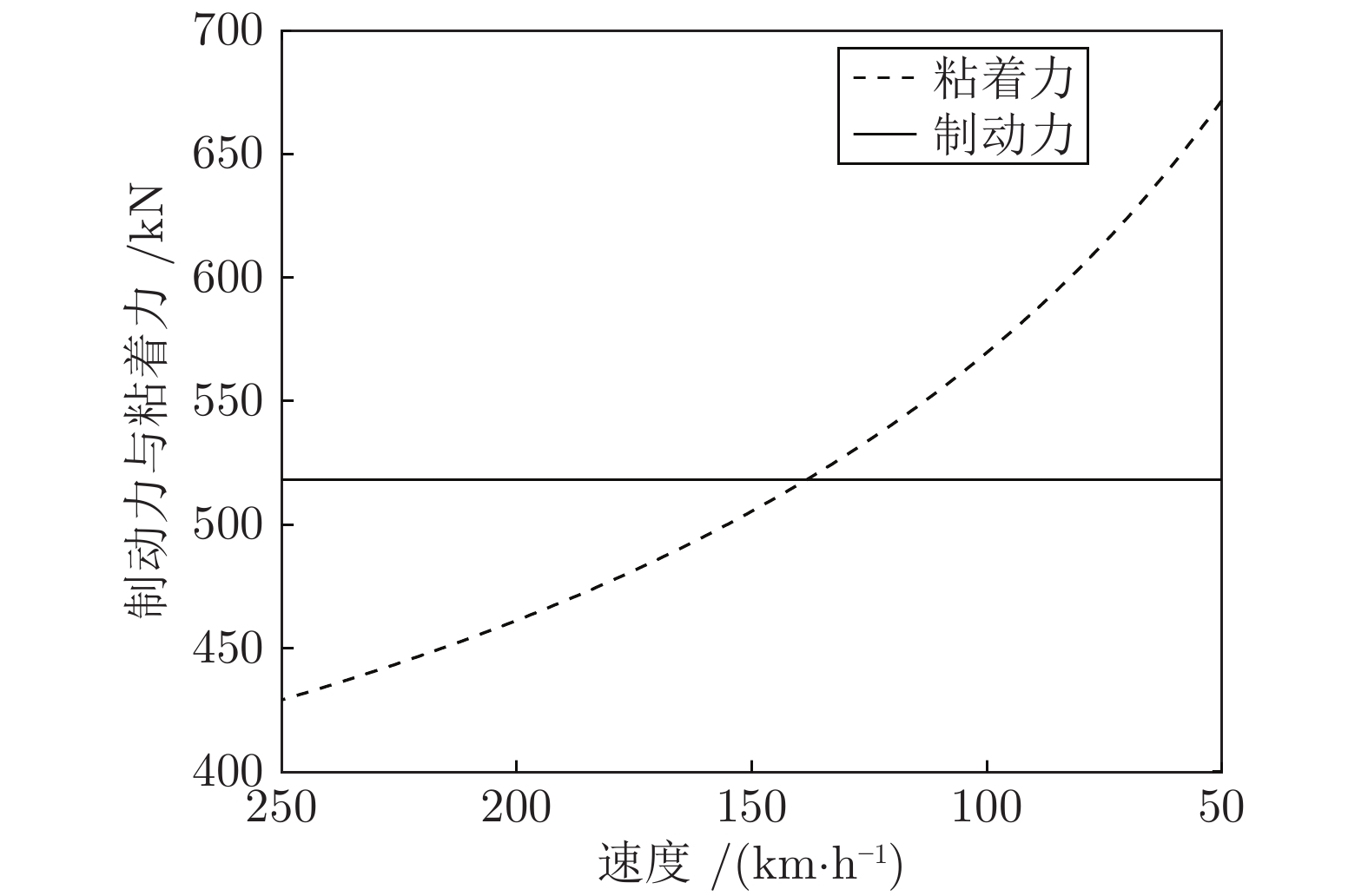
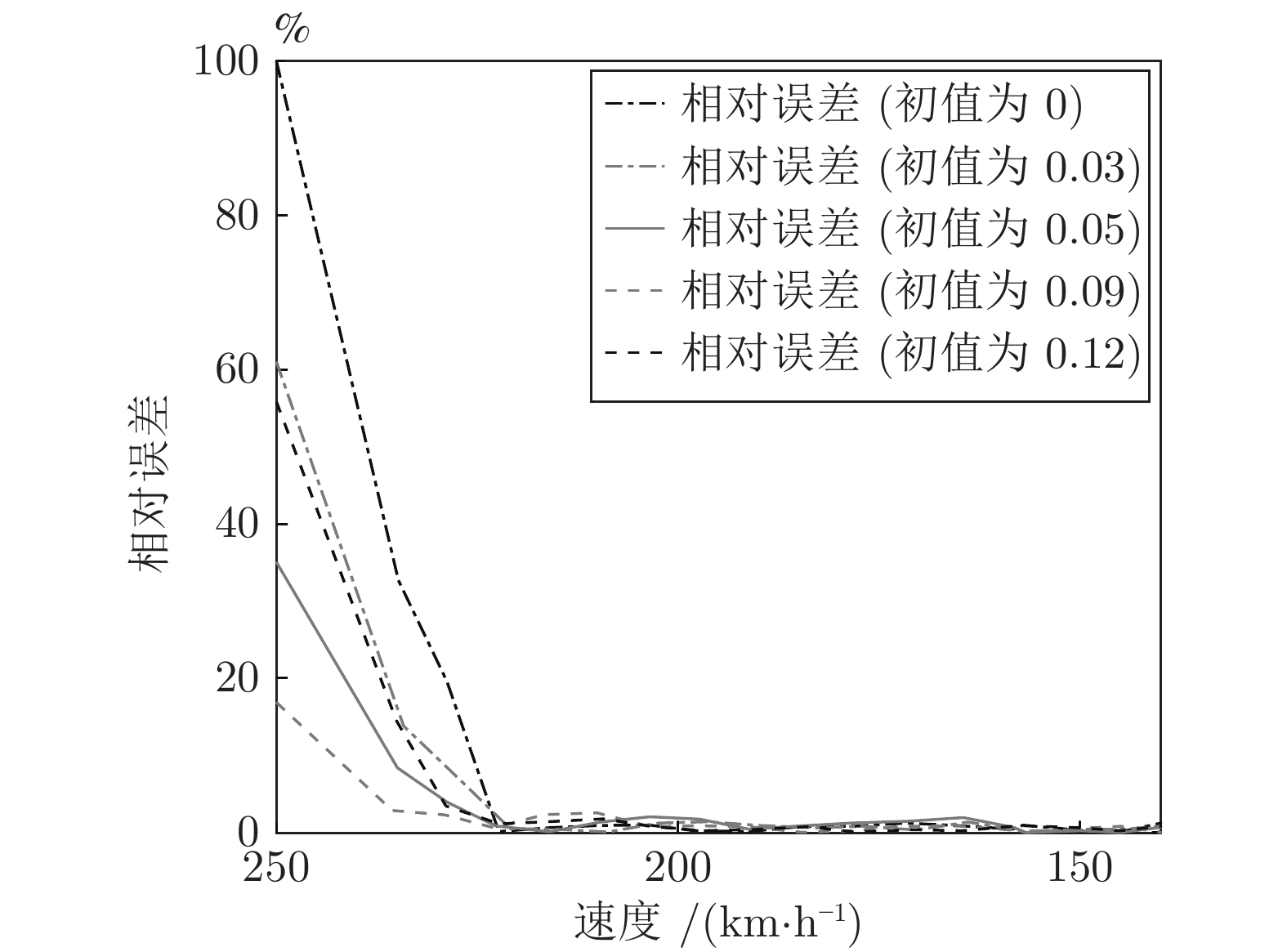
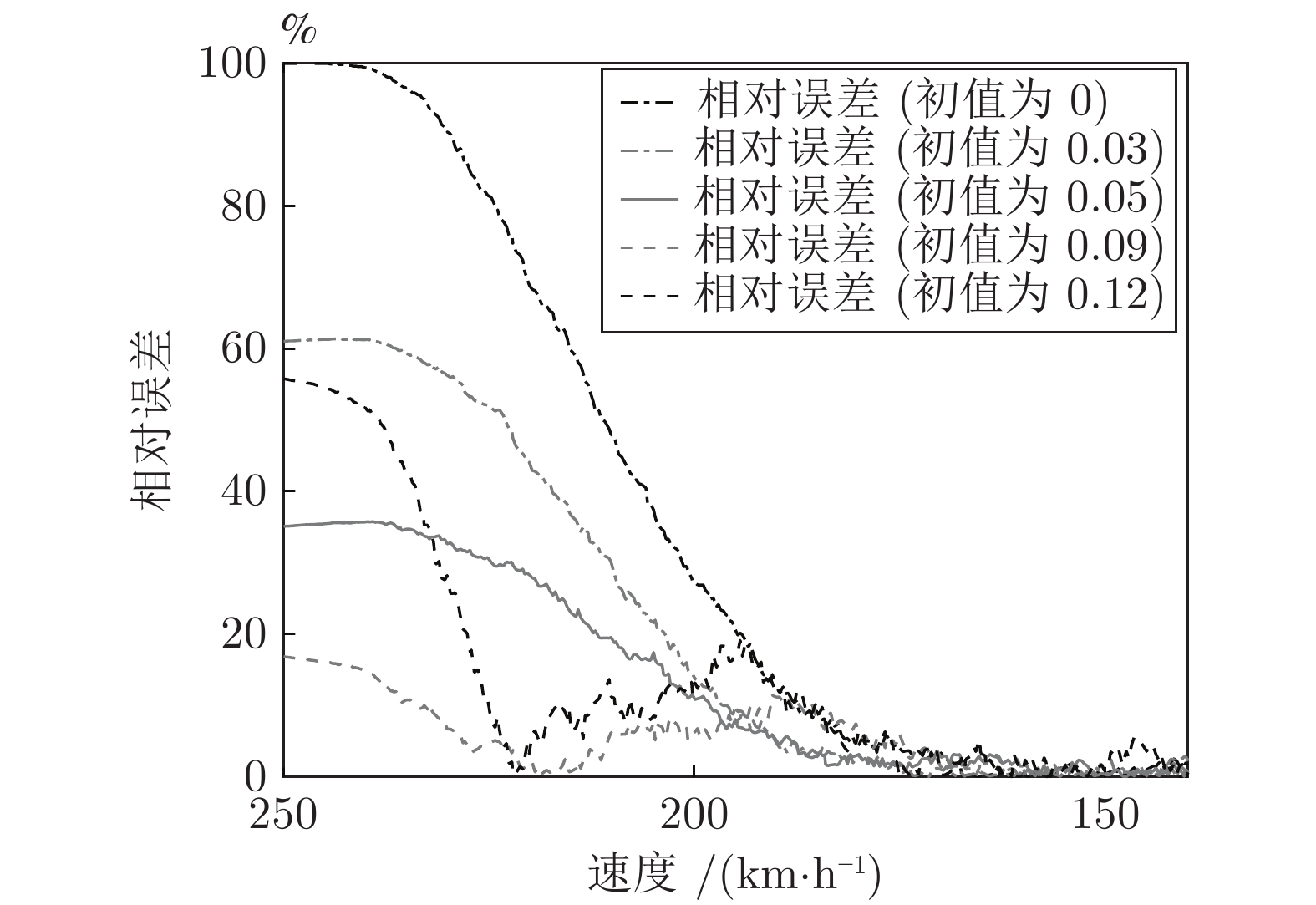
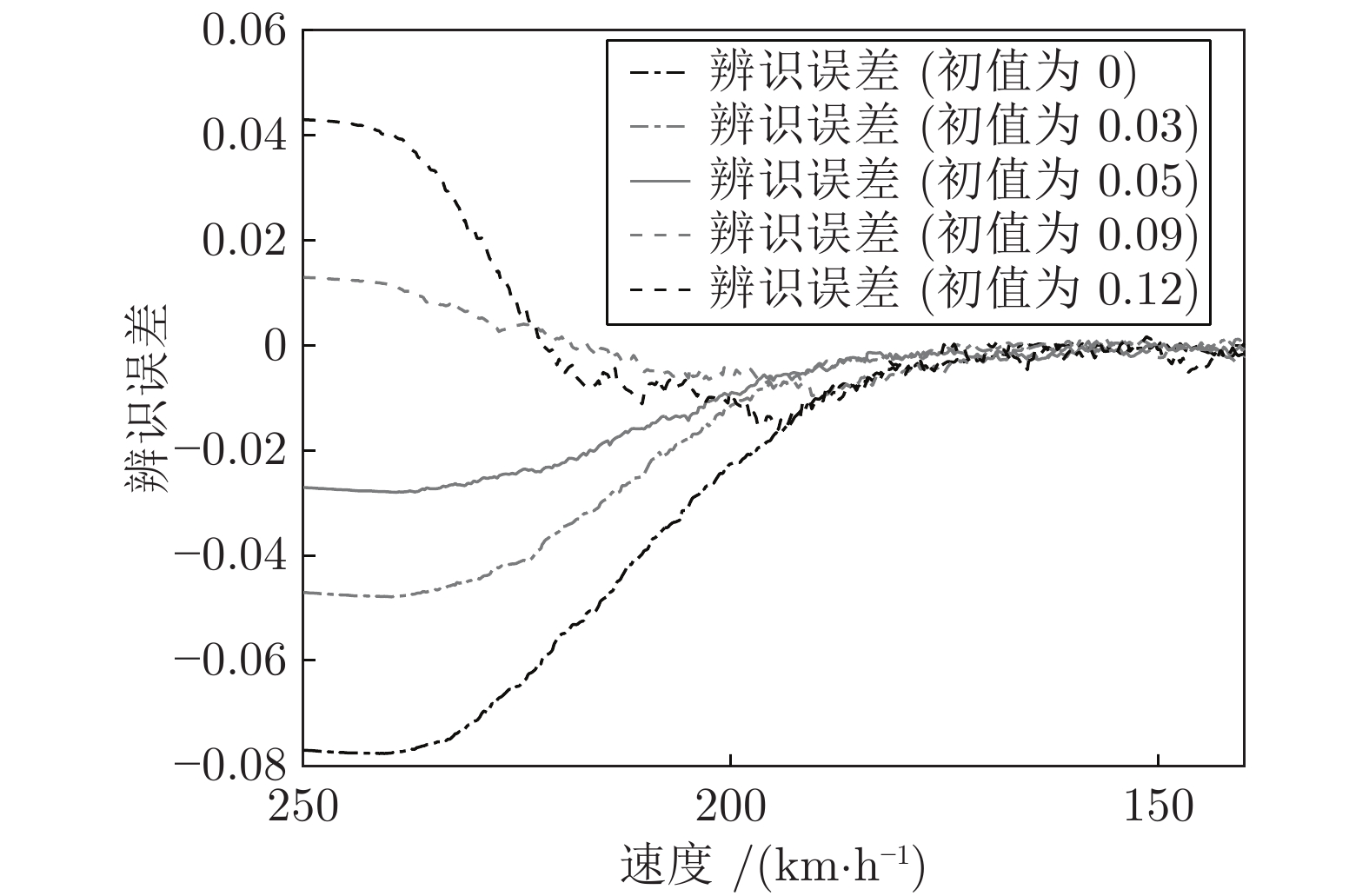
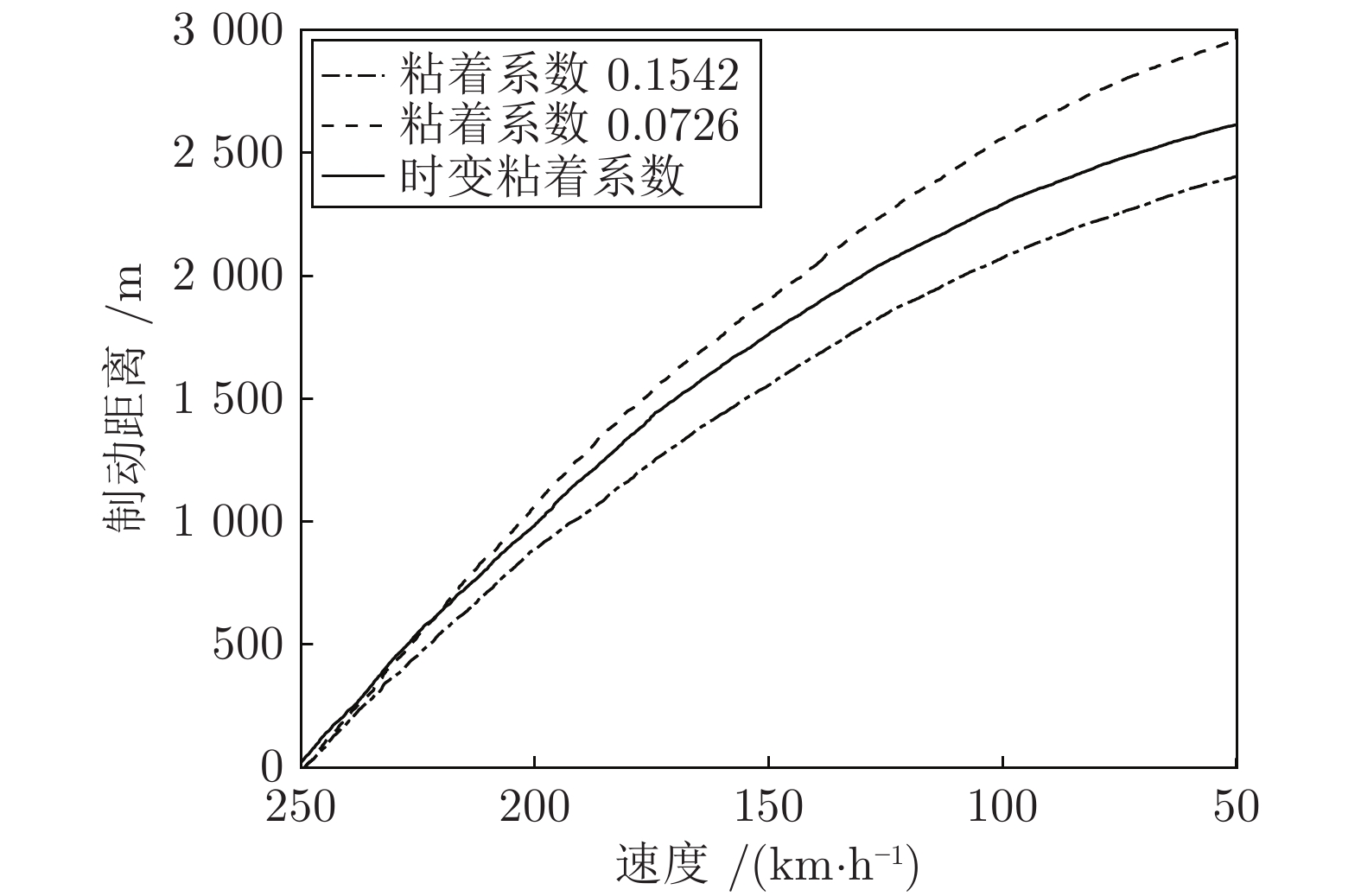
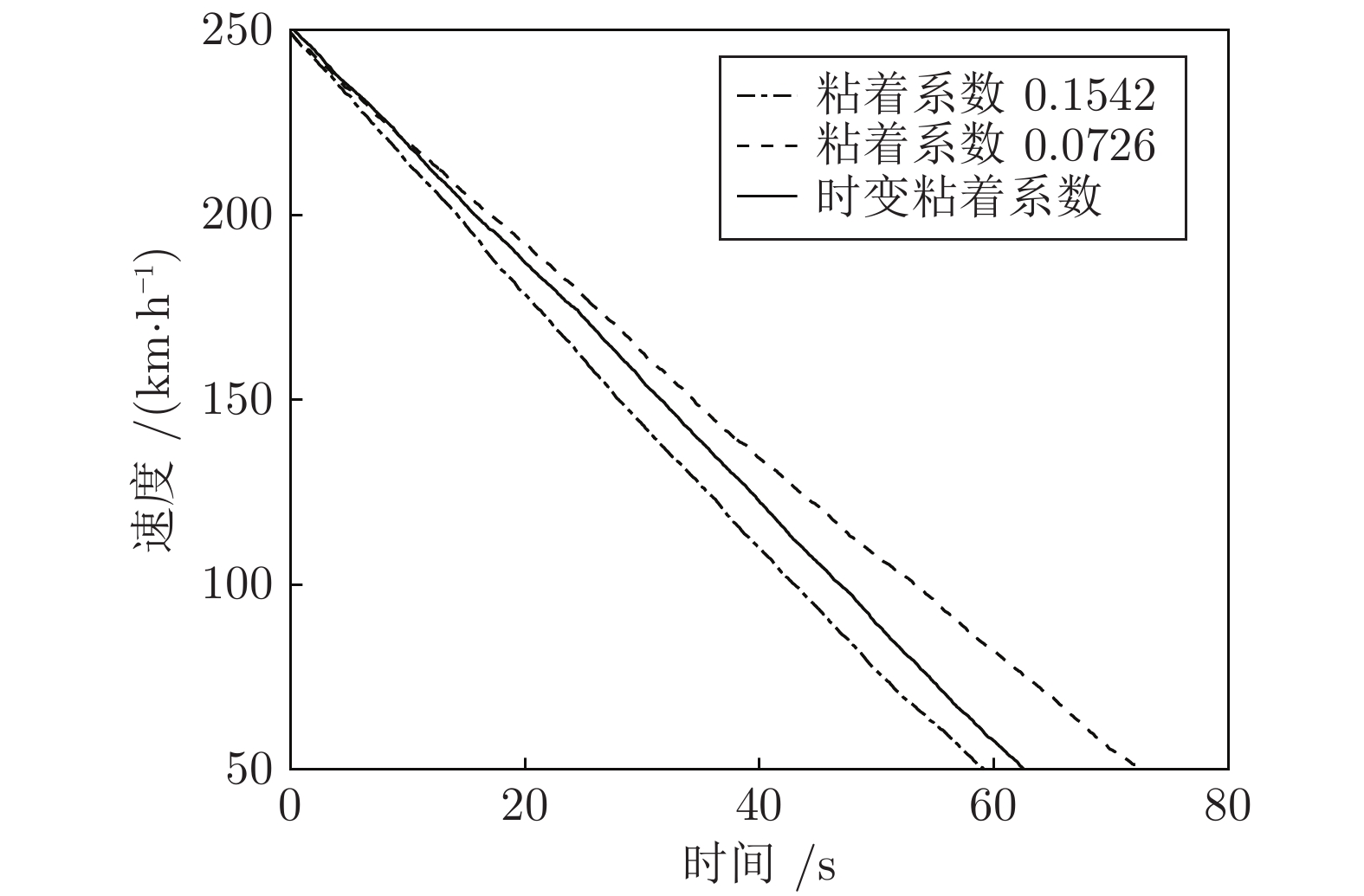
考虑列车制动性能与制动距离对列车安全的重要影响, 分析了列车运行的动力学特性, 构建了列车离散化制动模型,并针对影响列车制动性能的关键参数 — 钢轨粘着系数难以直接观测、随钢轨环境变化的特点, 提出基于滑动窗口与最大期望理论的轮轨粘着系数在线辨识算法. 首先, 依据数据特征确定滑动窗口位置与窗口尺寸; 然后, 构造列车动力学模型参数的条件数学期望, 并结合粒子滤波与粒子平滑算法以及贝叶斯理论, 估计预设模型参数下的列车运行状态; 在此基础上, 分析粘着系数的后验概率, 并极大化条件数学期望对模型参数预设进行优化更新, 进而实现模型真实参数的逐步逼近. 最后, 考虑雪地、隧道等场景下的粘着系数变化, 对本文方法进行了仿真验证, 并数值分析了粘着系数对制动距离的影响. 仿真结果表明本文算法可快速、准确地对粘着系数进行实时辨识, 掌握轮轨间实时粘着状态.
考虑列车制动性能与制动距离对列车安全的重要影响, 分析了列车运行的动力学特性, 构建了列车离散化制动模型,并针对影响列车制动性能的关键参数 — 钢轨粘着系数难以直接观测、随钢轨环境变化的特点, 提出基于滑动窗口与最大期望理论的轮轨粘着系数在线辨识算法. 首先, 依据数据特征确定滑动窗口位置与窗口尺寸; 然后, 构造列车动力学模型参数的条件数学期望, 并结合粒子滤波与粒子平滑算法以及贝叶斯理论, 估计预设模型参数下的列车运行状态; 在此基础上, 分析粘着系数的后验概率, 并极大化条件数学期望对模型参数预设进行优化更新, 进而实现模型真实参数的逐步逼近. 最后, 考虑雪地、隧道等场景下的粘着系数变化, 对本文方法进行了仿真验证, 并数值分析了粘着系数对制动距离的影响. 仿真结果表明本文算法可快速、准确地对粘着系数进行实时辨识, 掌握轮轨间实时粘着状态.






2019, 45(12): 2281-2293.
doi: 10.16383/j.aas.c190170
cstr: 32138.14.j.aas.c190170
摘要:
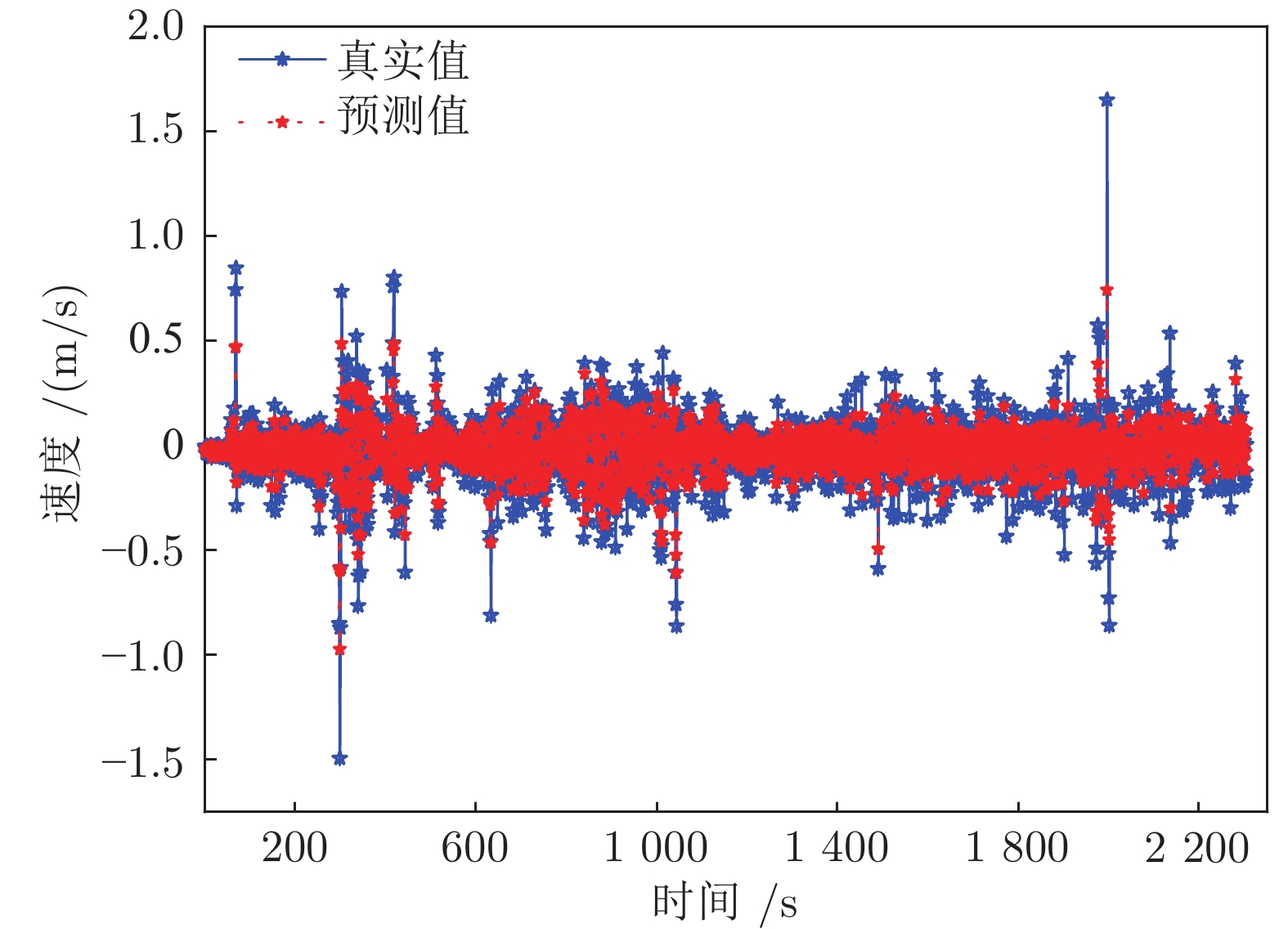
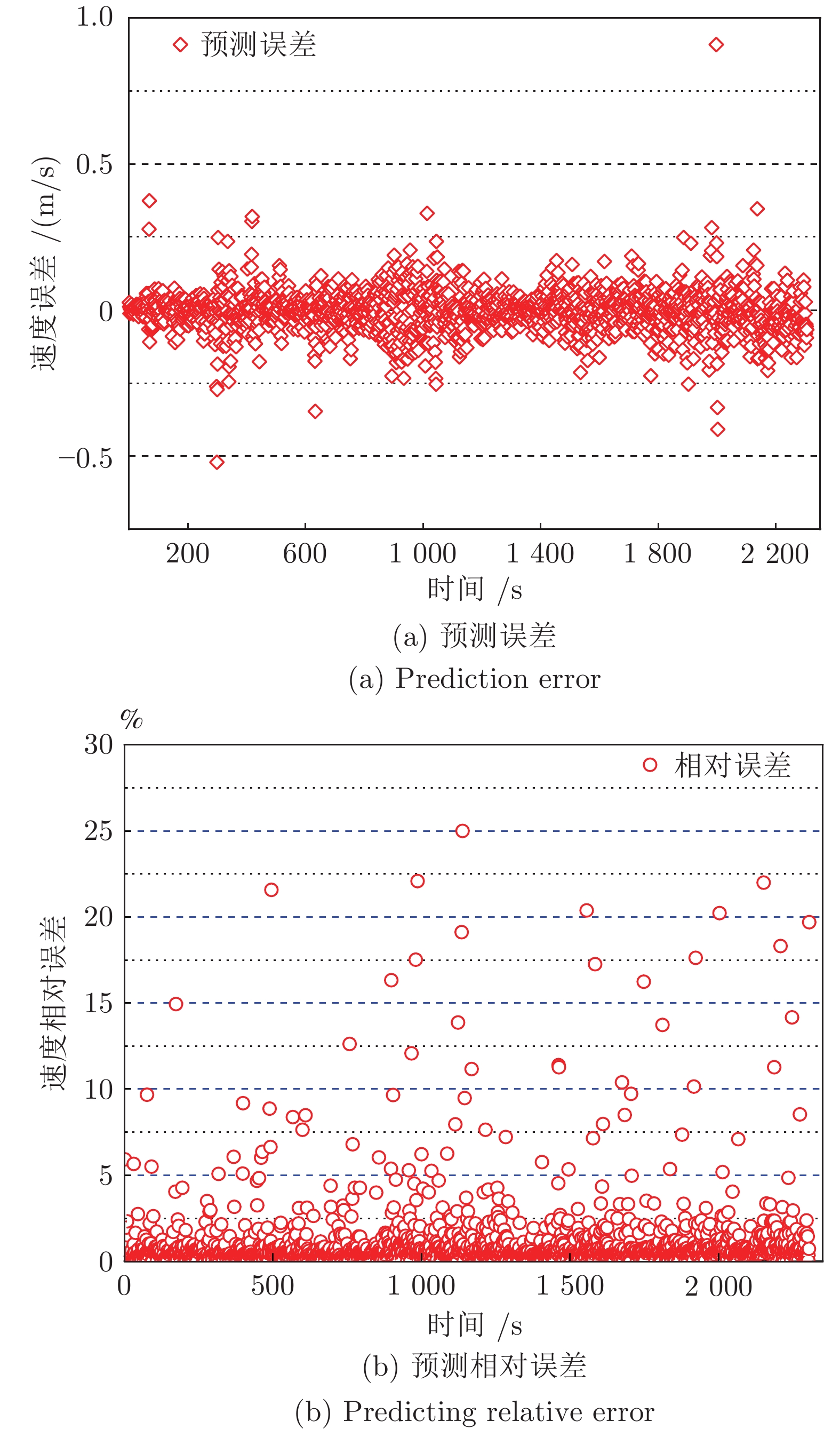
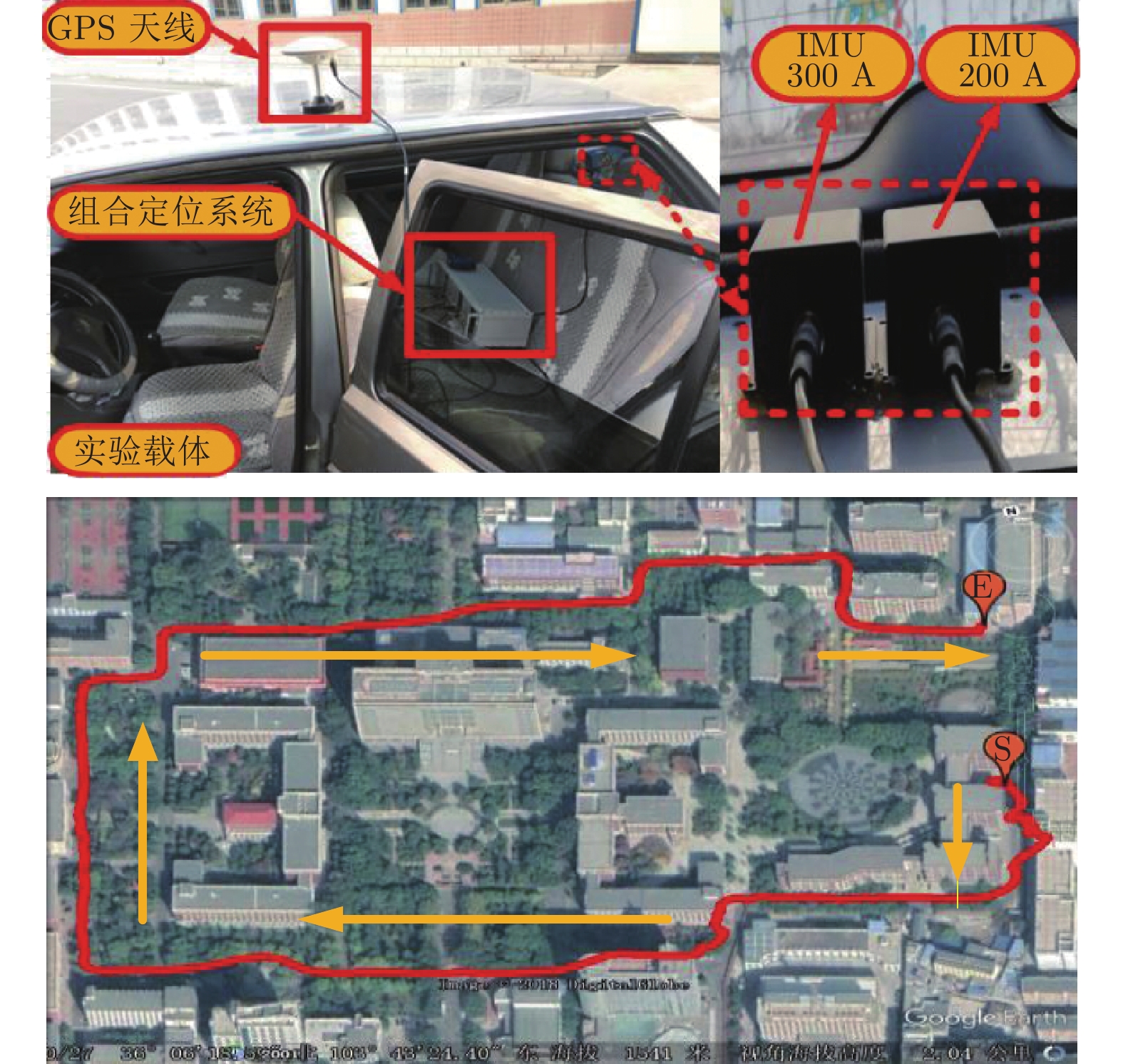
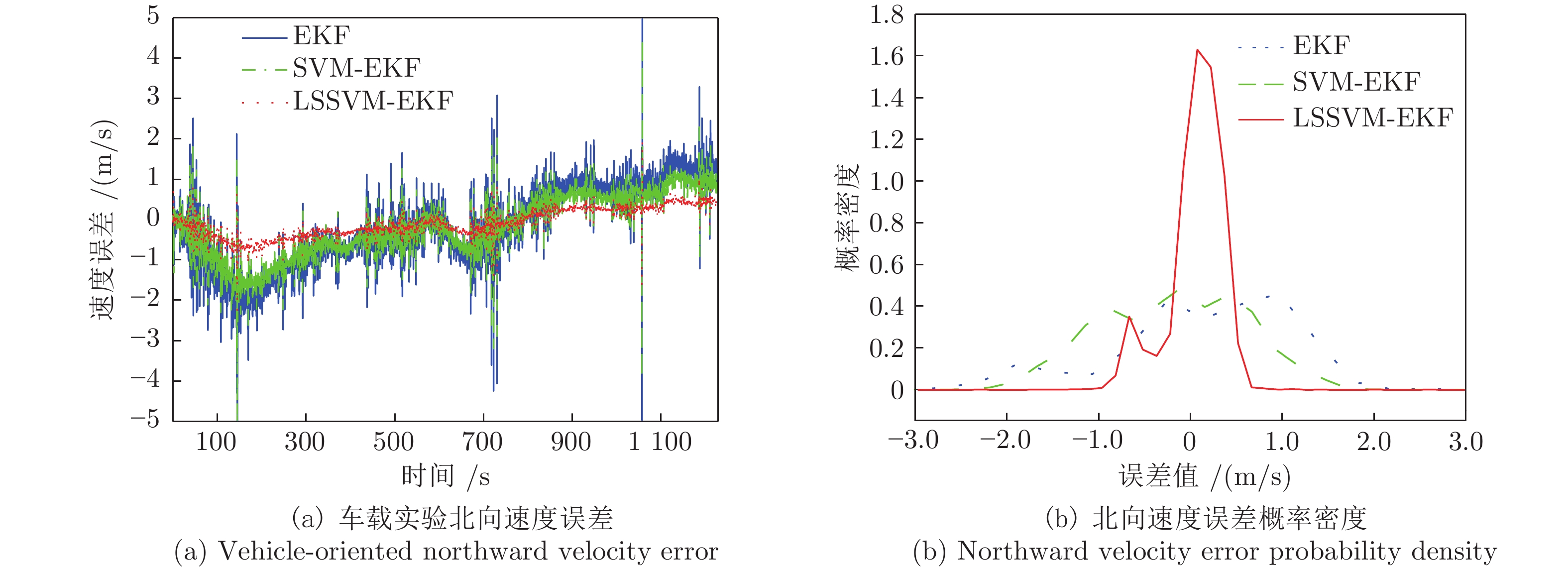
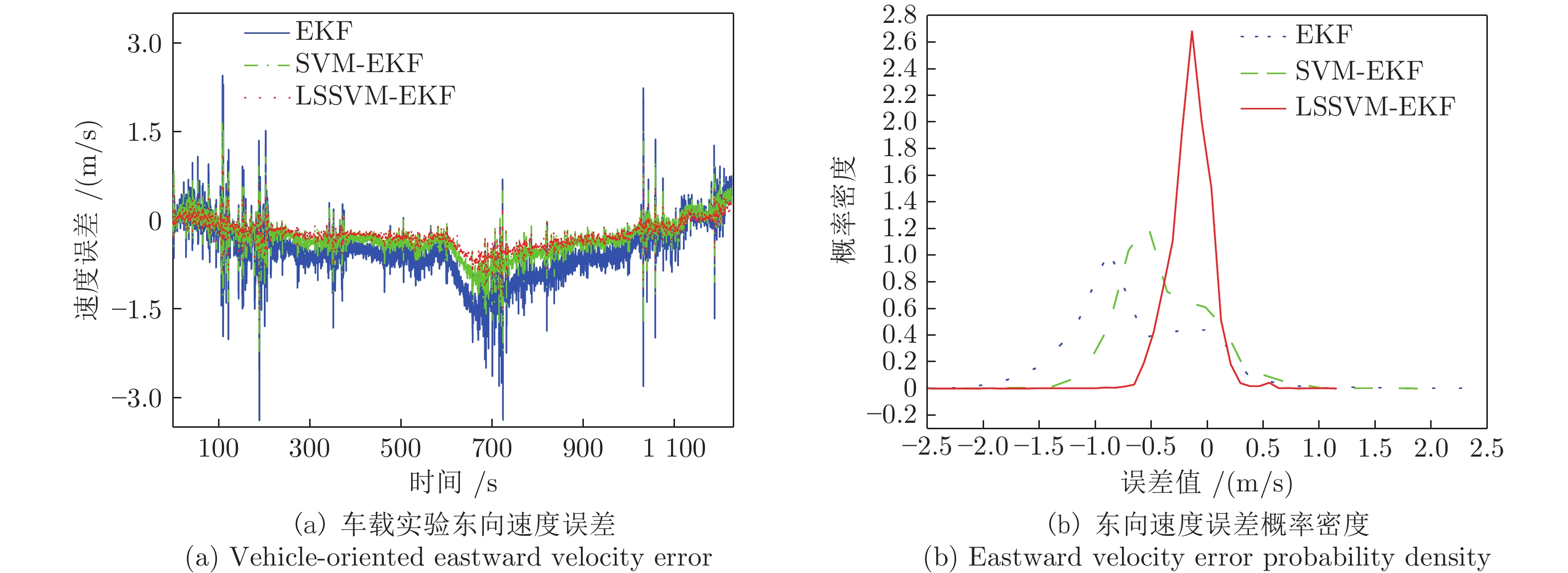
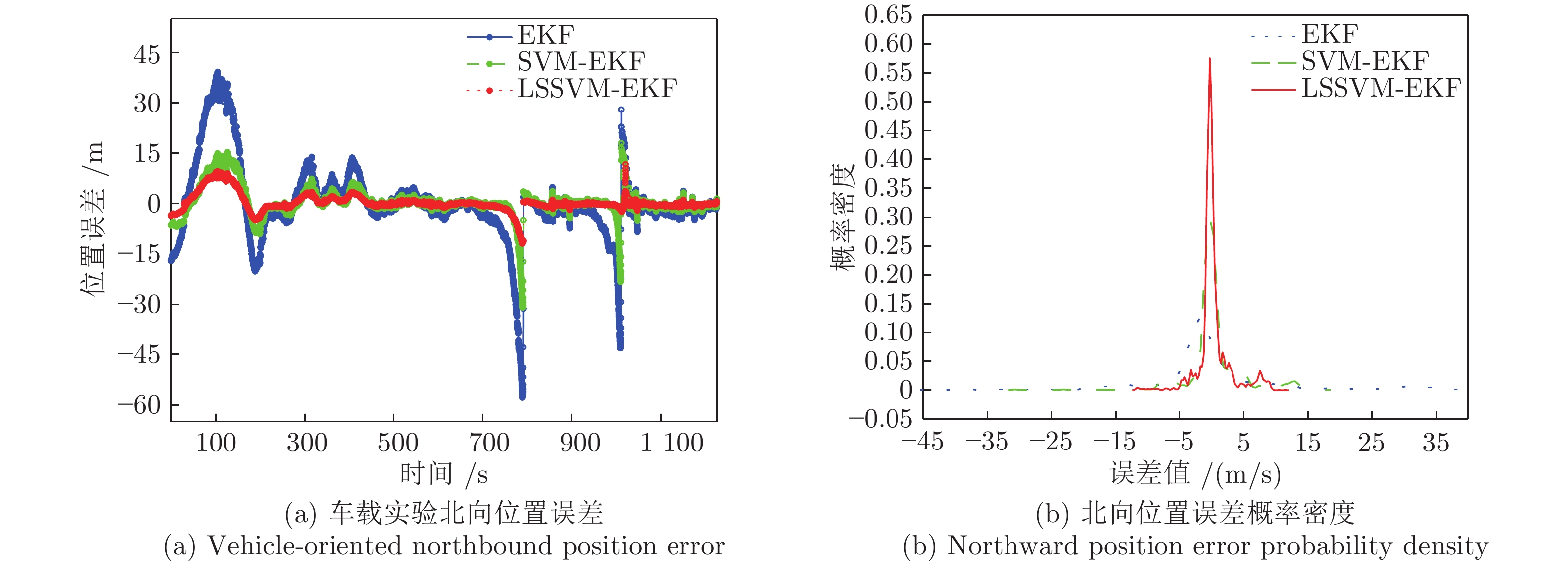
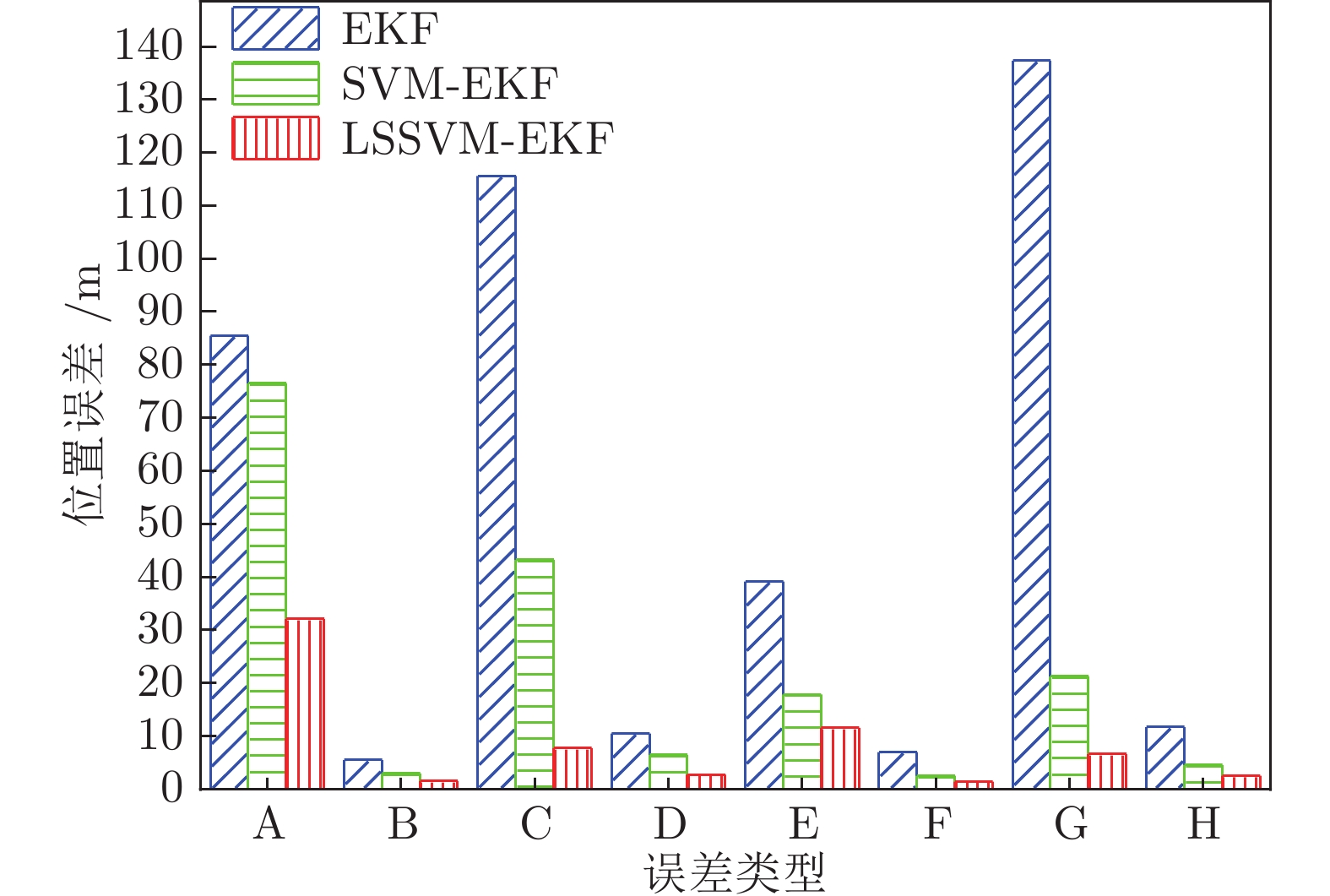
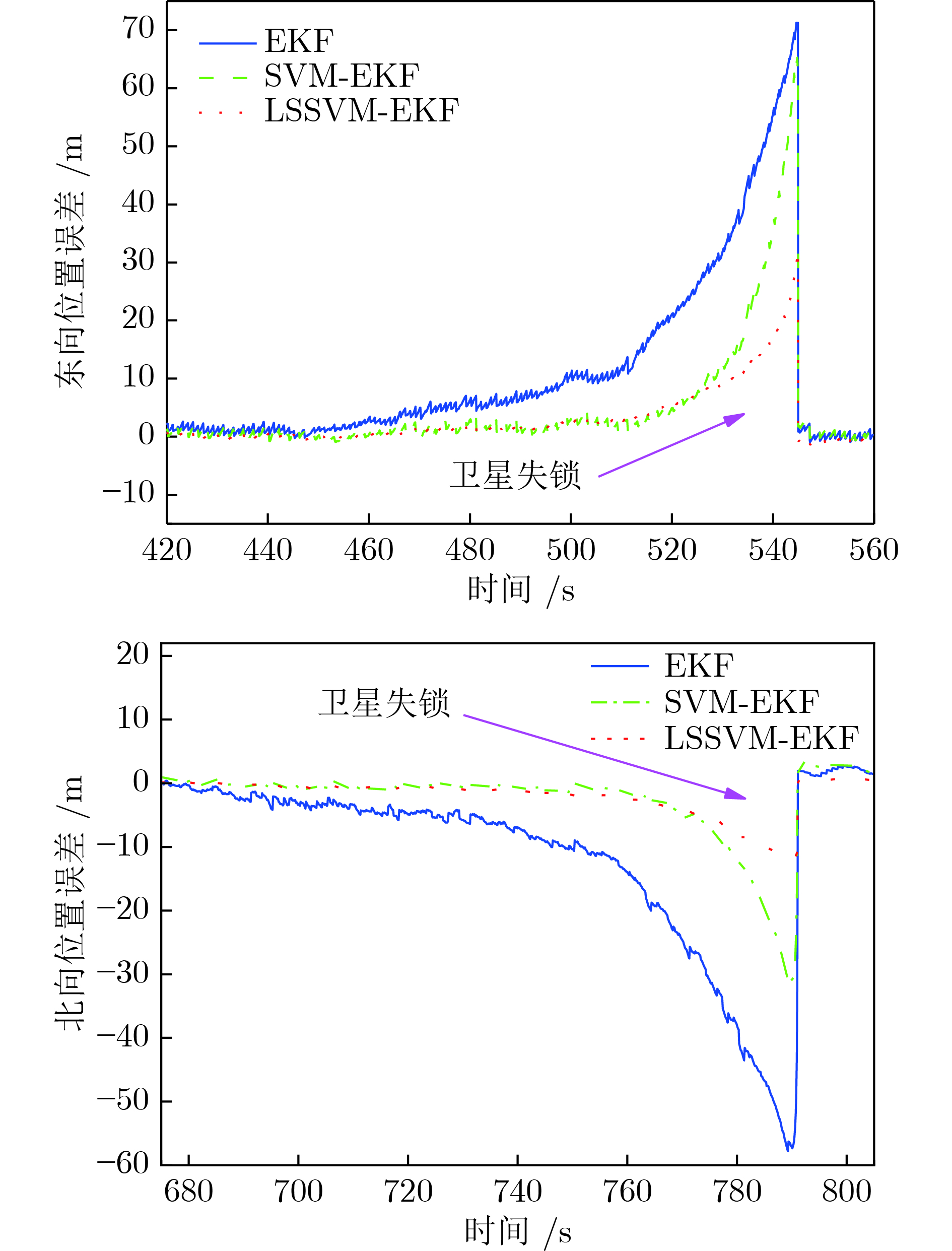
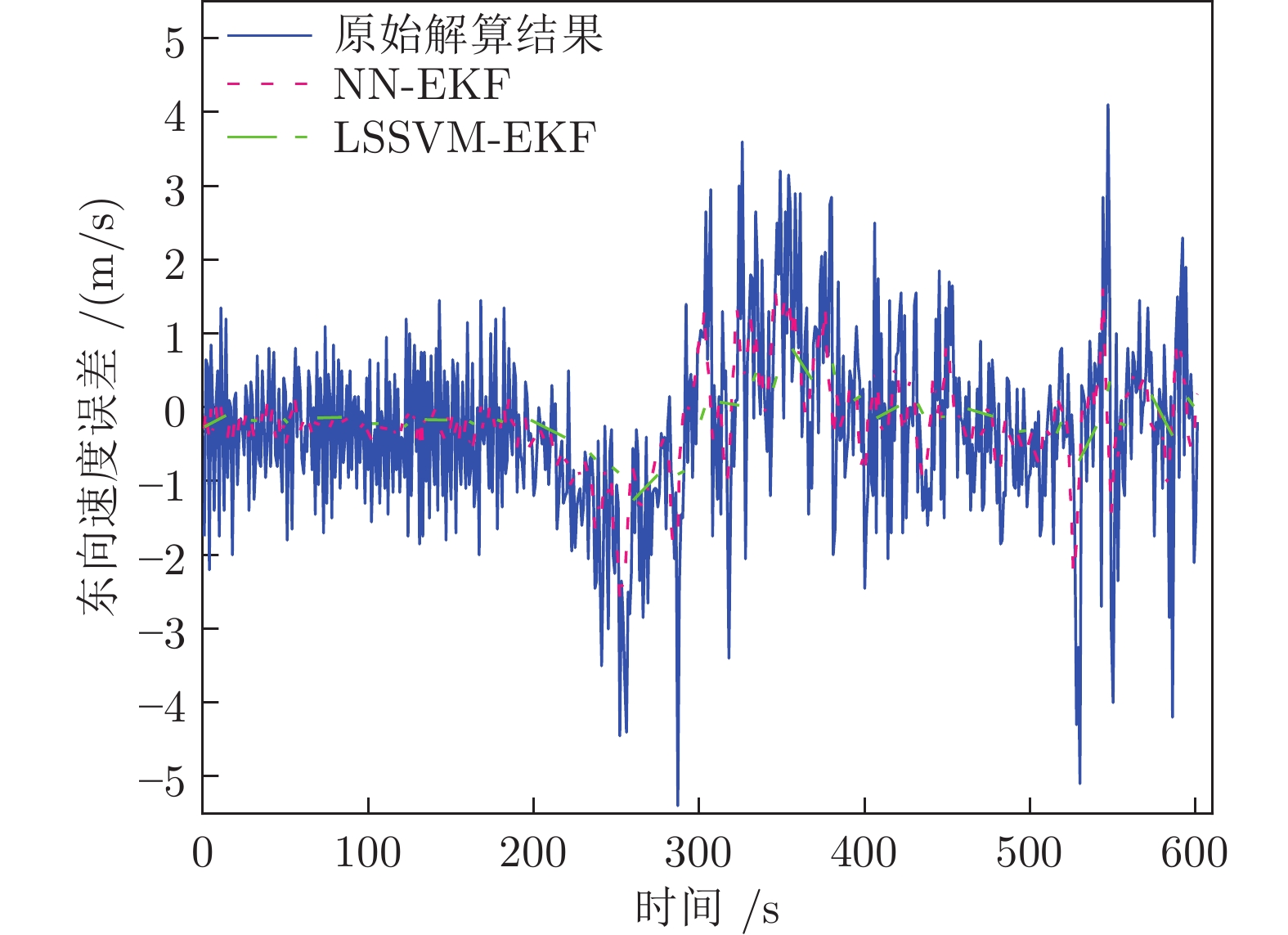
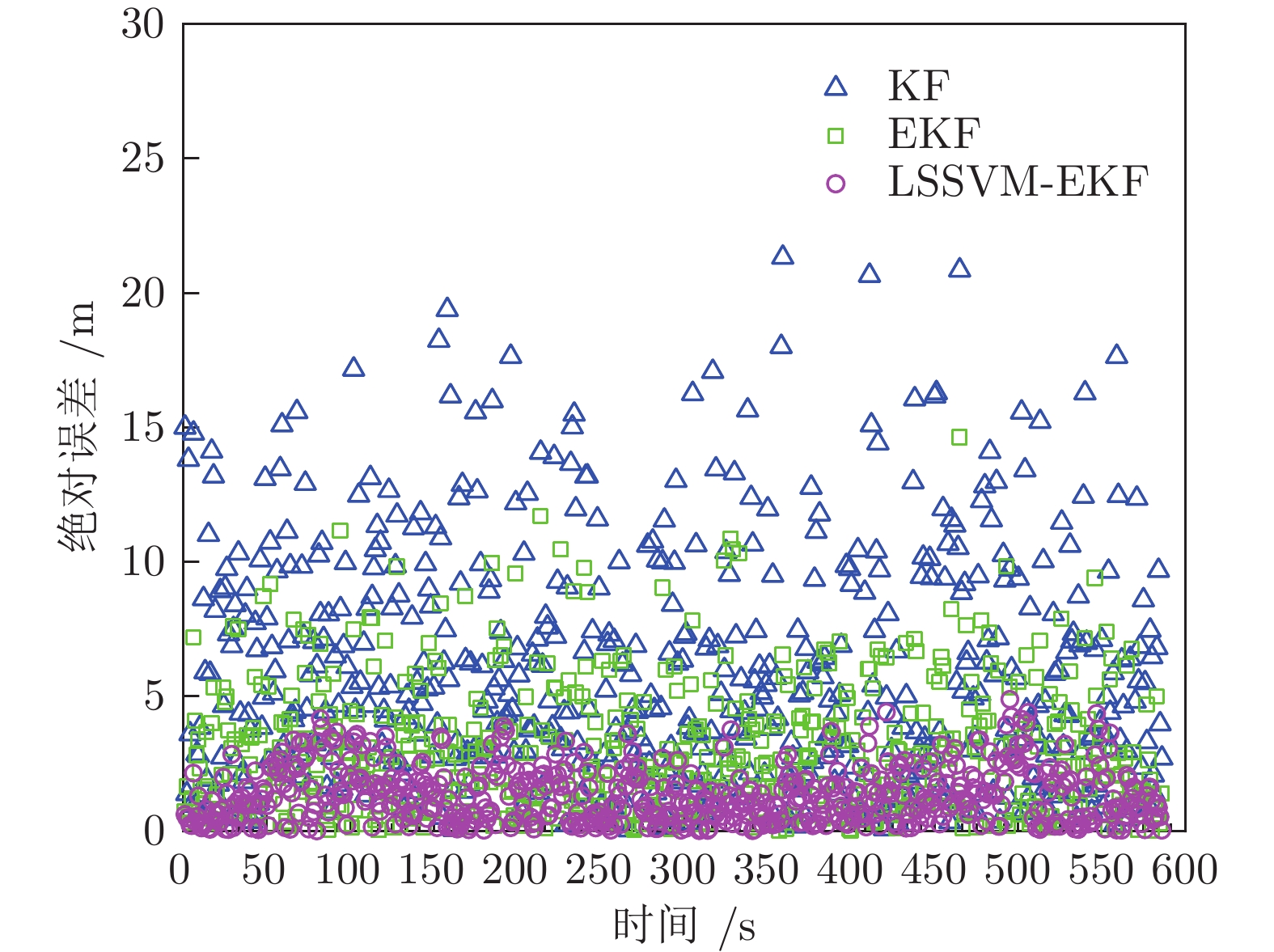
扩展卡尔曼滤波(Extended Kalman filter, EKF)的准确性依赖于观测的质量、观测对象的非线性程度及动态模型的准确性. 该方法通常假设其动态模型是不变的, 而且默认为非线性程度较弱, 这些在实际的车辆运动中都是不可靠的处理方式. 本文提出了一种利用最小二乘支持向量机(Least squares support vector machine, LSSVM)的技术增强扩展卡尔曼滤波的新算法. LSSVM改进后的EKF算法(LSSVM-EKF)一定程度上弥补了EKF处理强非线性问题的不足; 而且可以自适应地估计历史数据的动态建模偏差, 并使用估计偏差来补偿动态模型. 开发了一种引入Allan方差的K折交叉验证方法来确定LSSVM的训练参数; 将动态模型偏差通过有限数据集与LSSVM一起训练; 并引入无损变换将LSSVM与EKF进行了集成. 为了验证算法, 最后设计了车载试验, 并采用列车数据验证了文中所提的方法, 结果表明LSSVM-EKF可以较好地适应实际车辆运动环境, 可以提供一种可用的车辆定位方法.
扩展卡尔曼滤波(Extended Kalman filter, EKF)的准确性依赖于观测的质量、观测对象的非线性程度及动态模型的准确性. 该方法通常假设其动态模型是不变的, 而且默认为非线性程度较弱, 这些在实际的车辆运动中都是不可靠的处理方式. 本文提出了一种利用最小二乘支持向量机(Least squares support vector machine, LSSVM)的技术增强扩展卡尔曼滤波的新算法. LSSVM改进后的EKF算法(LSSVM-EKF)一定程度上弥补了EKF处理强非线性问题的不足; 而且可以自适应地估计历史数据的动态建模偏差, 并使用估计偏差来补偿动态模型. 开发了一种引入Allan方差的K折交叉验证方法来确定LSSVM的训练参数; 将动态模型偏差通过有限数据集与LSSVM一起训练; 并引入无损变换将LSSVM与EKF进行了集成. 为了验证算法, 最后设计了车载试验, 并采用列车数据验证了文中所提的方法, 结果表明LSSVM-EKF可以较好地适应实际车辆运动环境, 可以提供一种可用的车辆定位方法.






2019, 45(12): 2294-2302.
doi: 10.16383/j.aas.c190258
cstr: 32138.14.j.aas.c190258
摘要:
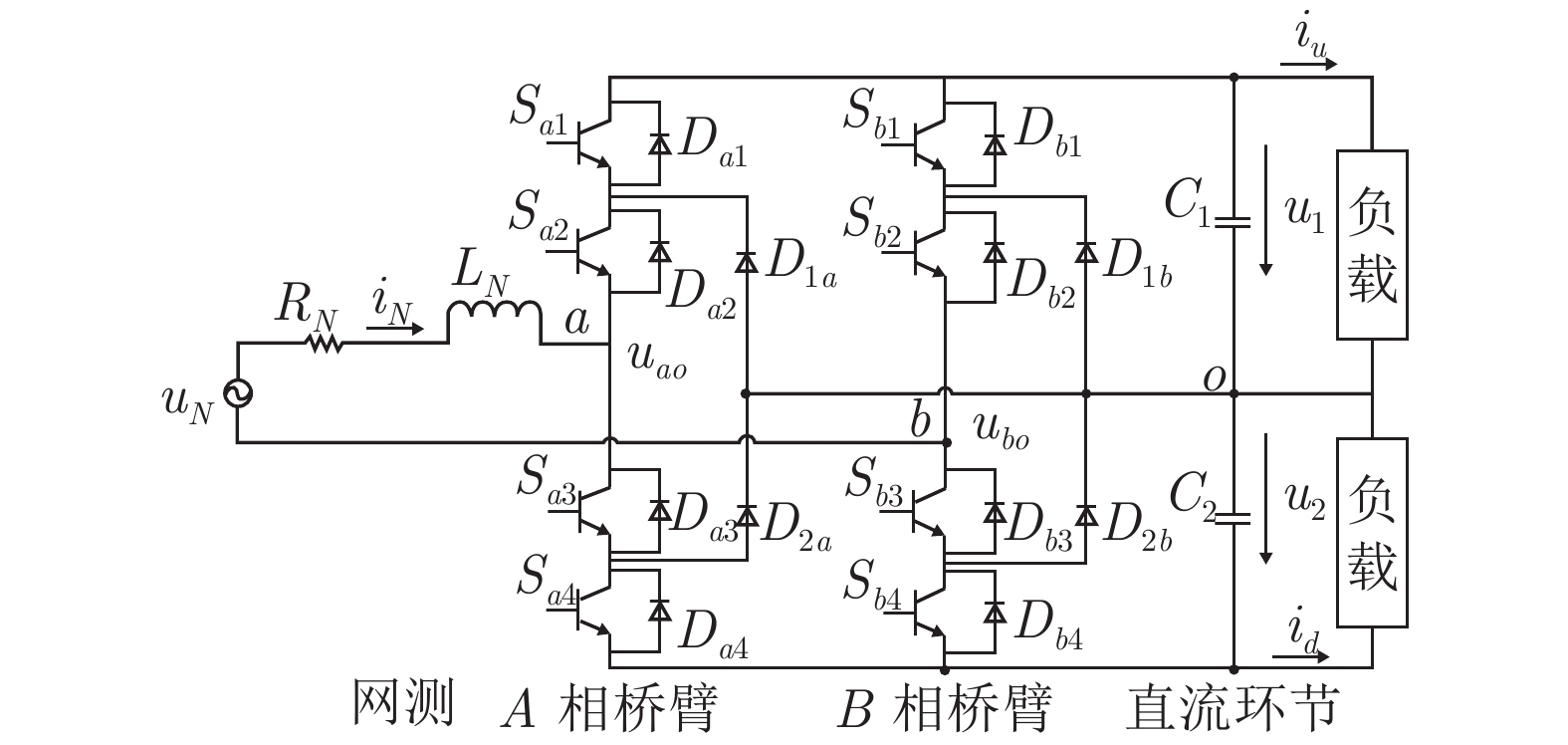
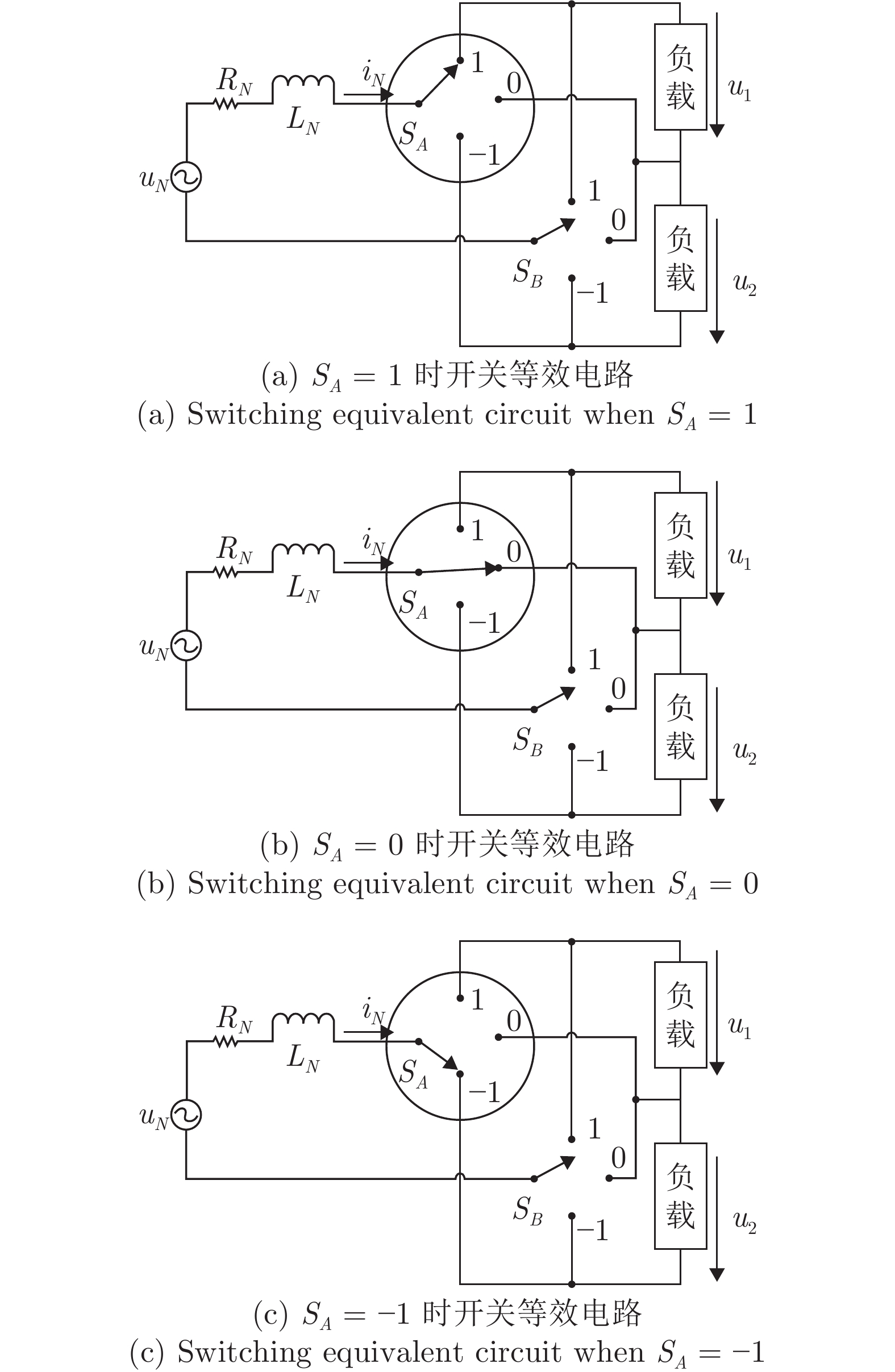
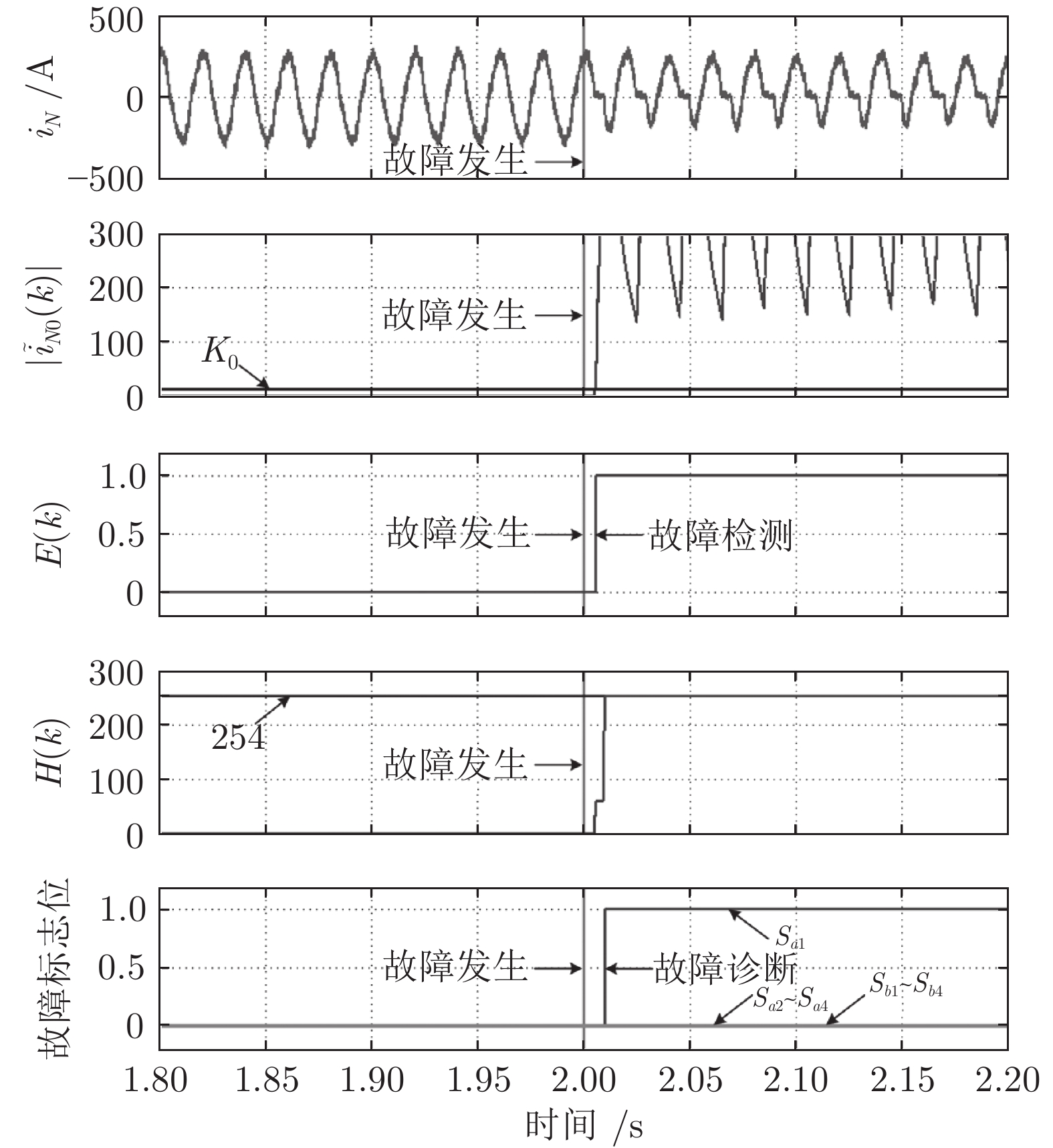
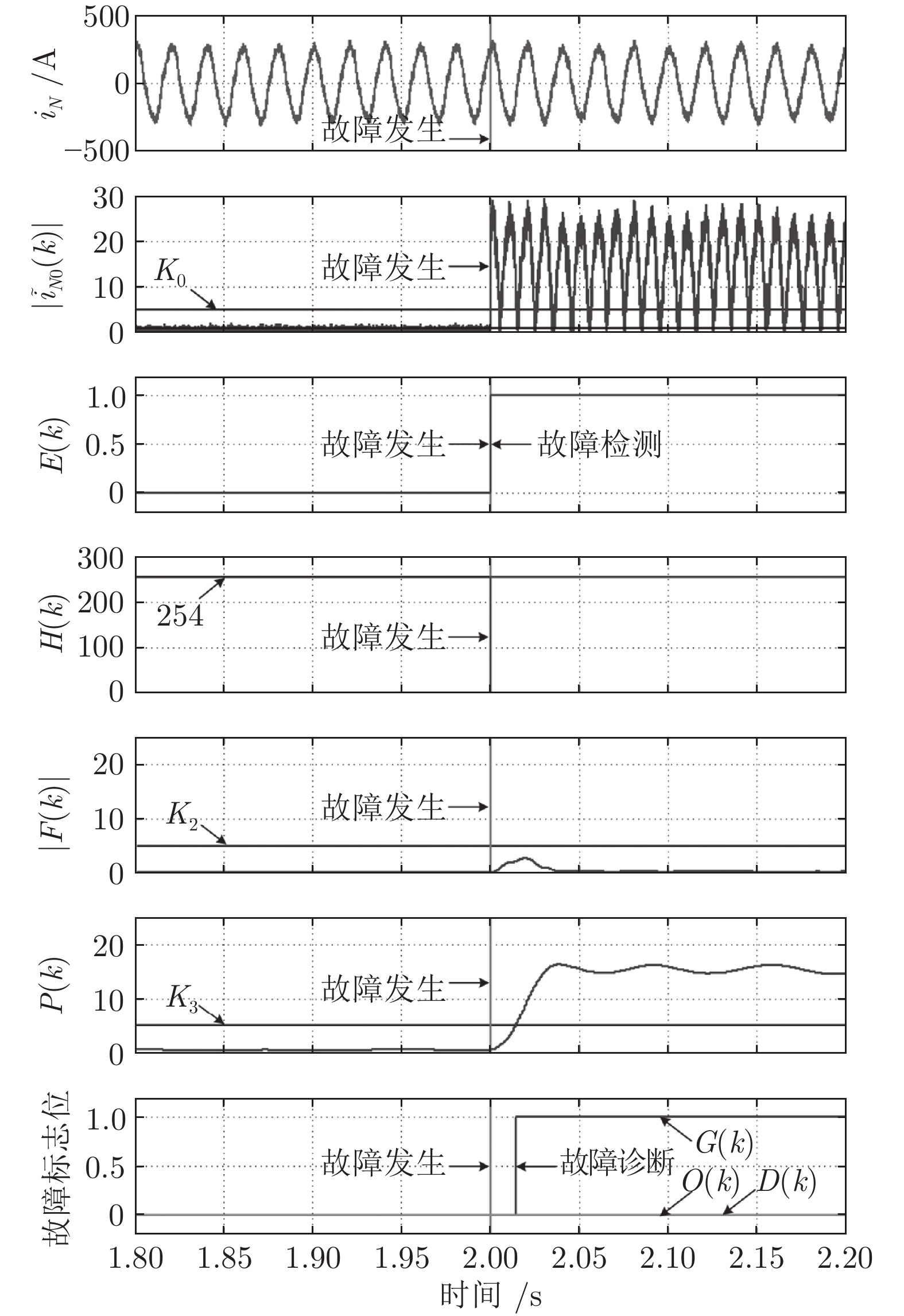
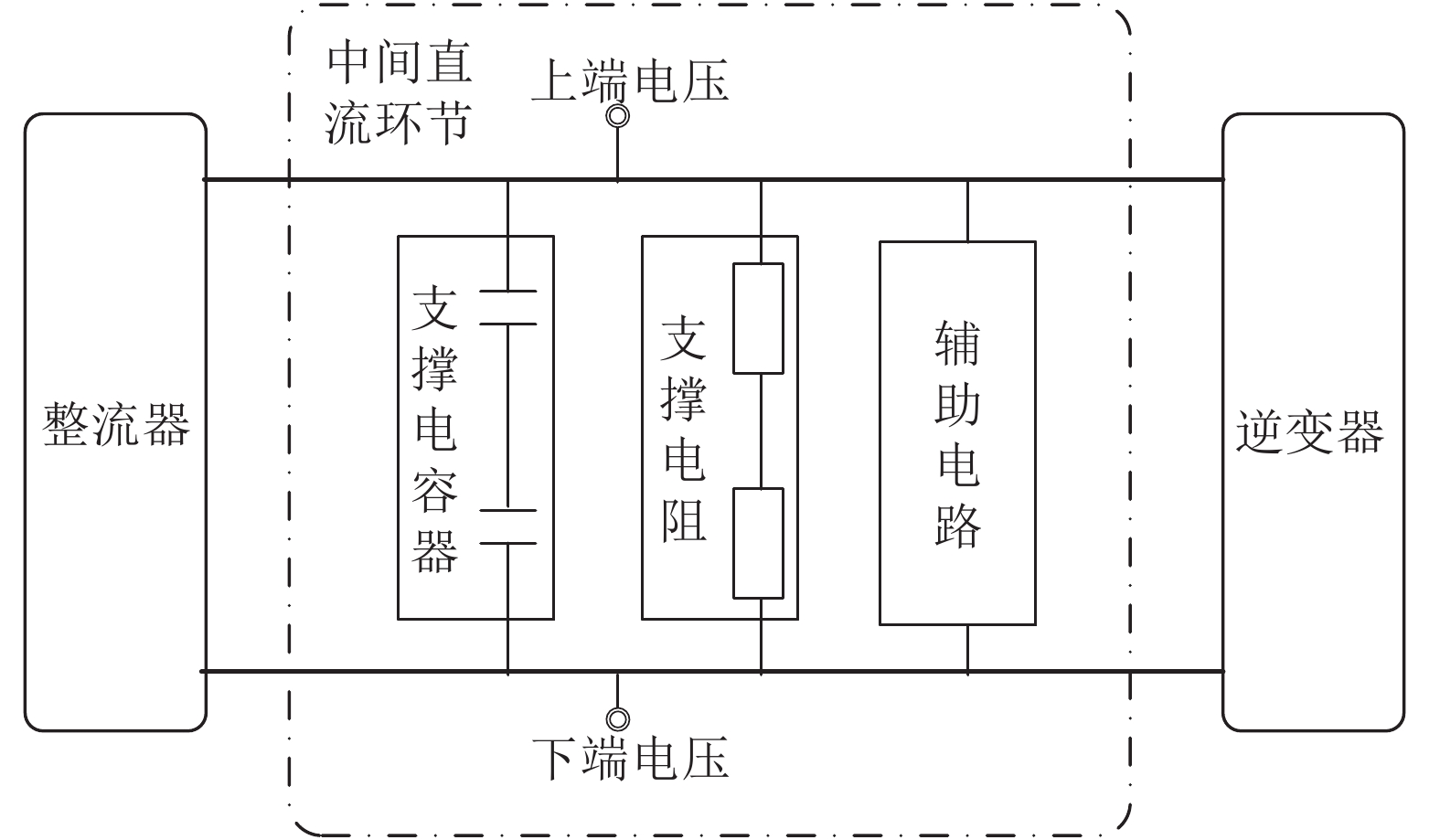
提出了一种高速列车牵引整流器多类故障联合诊断方法. 首先, 基于三电平牵引整流器开路故障分析, 建立整流器所有功率器件开路故障以及正常运行的状态空间模型并构建相应状态观测器. 然后, 基于正常状态观测器进行故障检测, 检测到故障后, 基于故障观测器区分功率器件开路故障和网侧电流传感器故障, 进而诊断出功率器件开路故障位置和网侧电流传感器故障类型. 实时仿真结果验证了本文方法的正确性和有效性.
提出了一种高速列车牵引整流器多类故障联合诊断方法. 首先, 基于三电平牵引整流器开路故障分析, 建立整流器所有功率器件开路故障以及正常运行的状态空间模型并构建相应状态观测器. 然后, 基于正常状态观测器进行故障检测, 检测到故障后, 基于故障观测器区分功率器件开路故障和网侧电流传感器故障, 进而诊断出功率器件开路故障位置和网侧电流传感器故障类型. 实时仿真结果验证了本文方法的正确性和有效性.




2019, 45(12): 2303-2311.
doi: 10.16383/j.aas.c190204
cstr: 32138.14.j.aas.c190204
摘要:
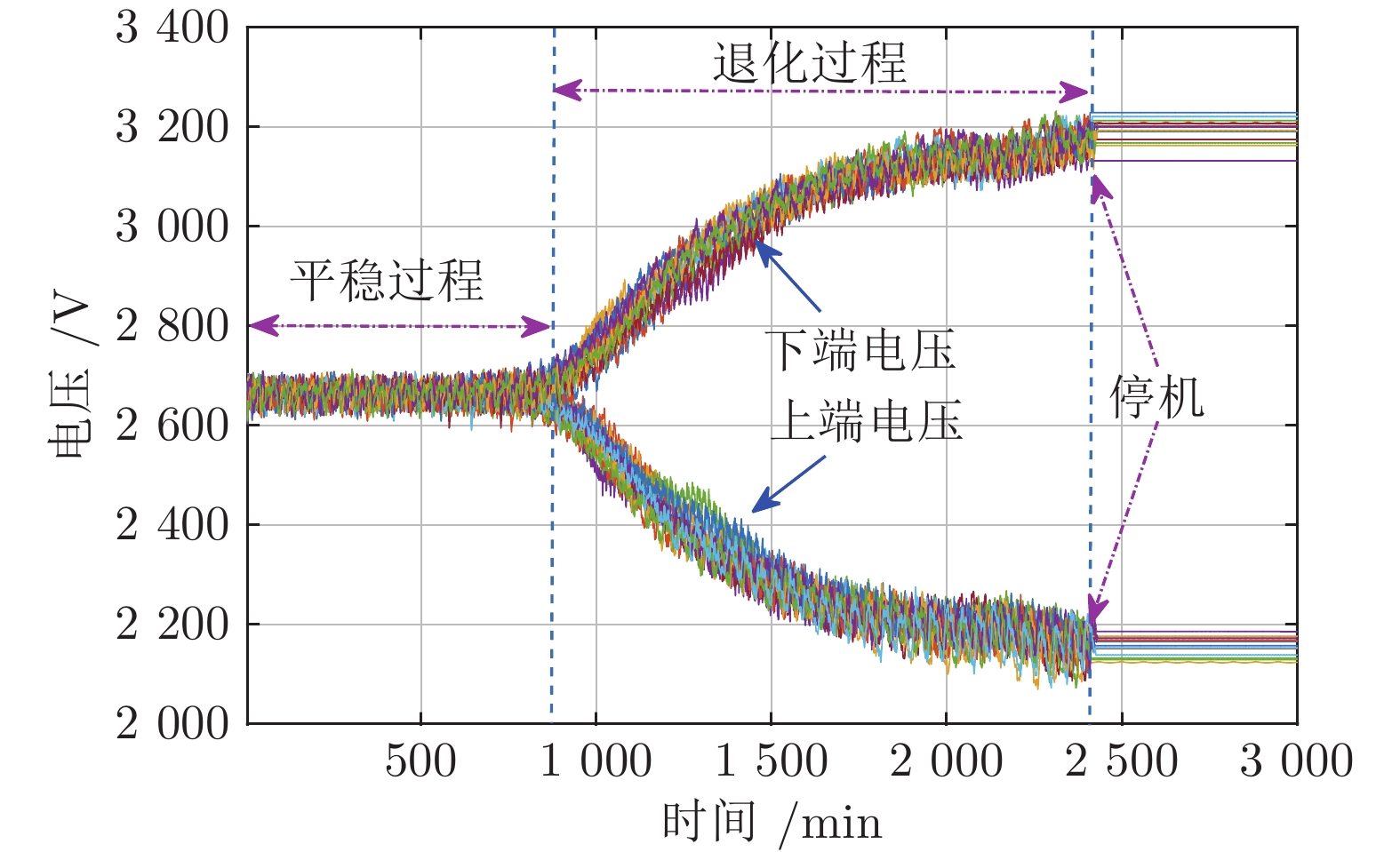
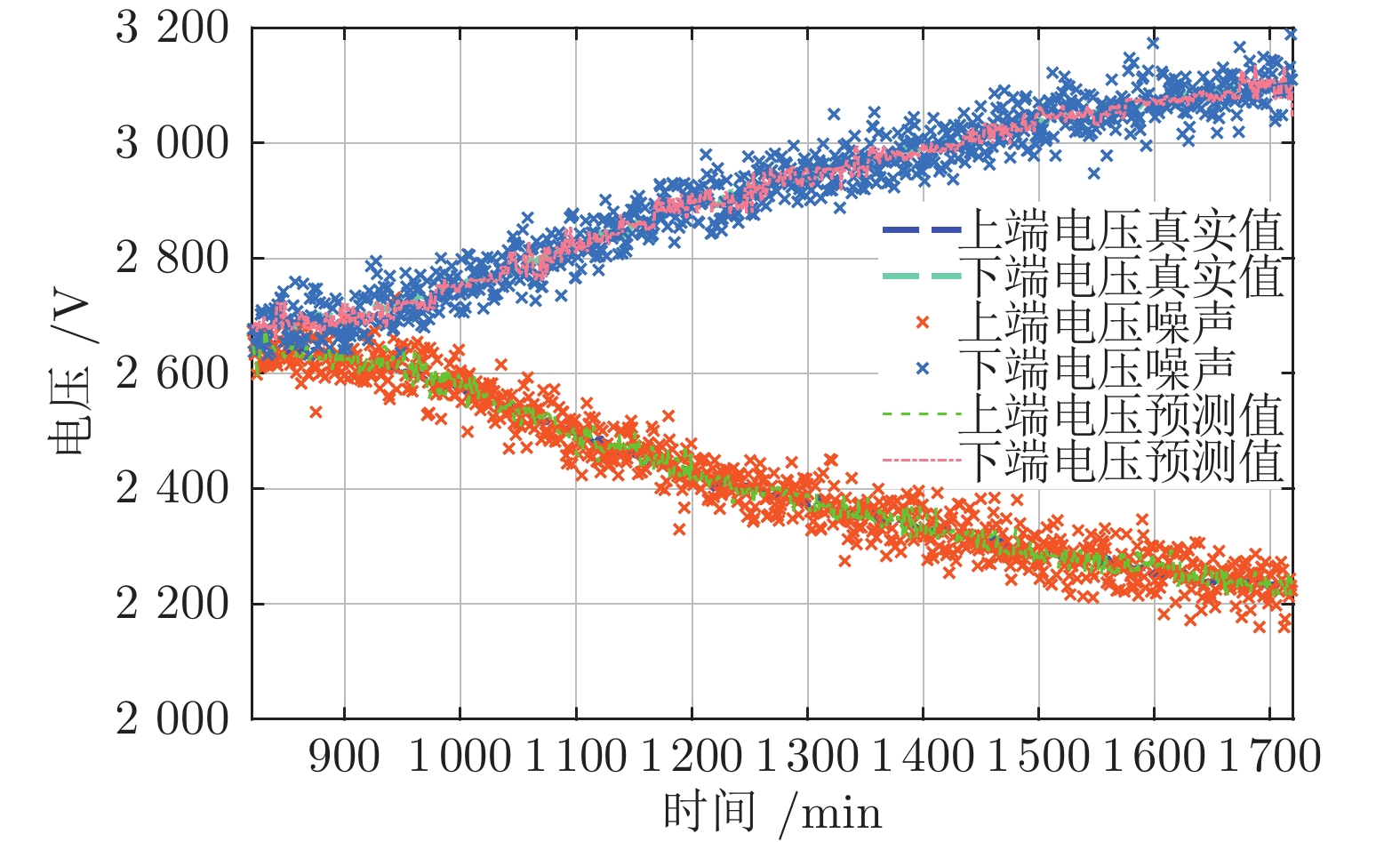
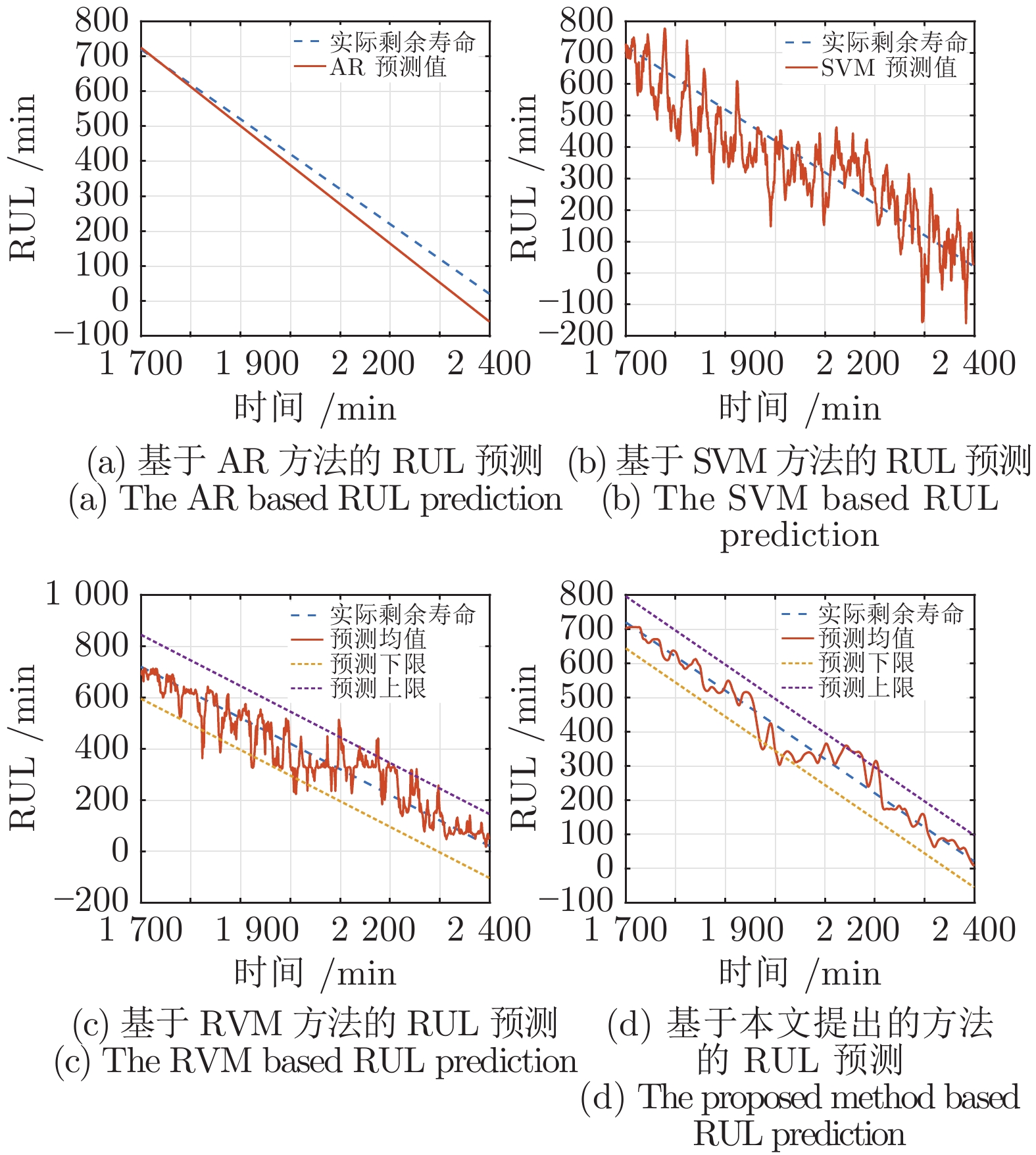
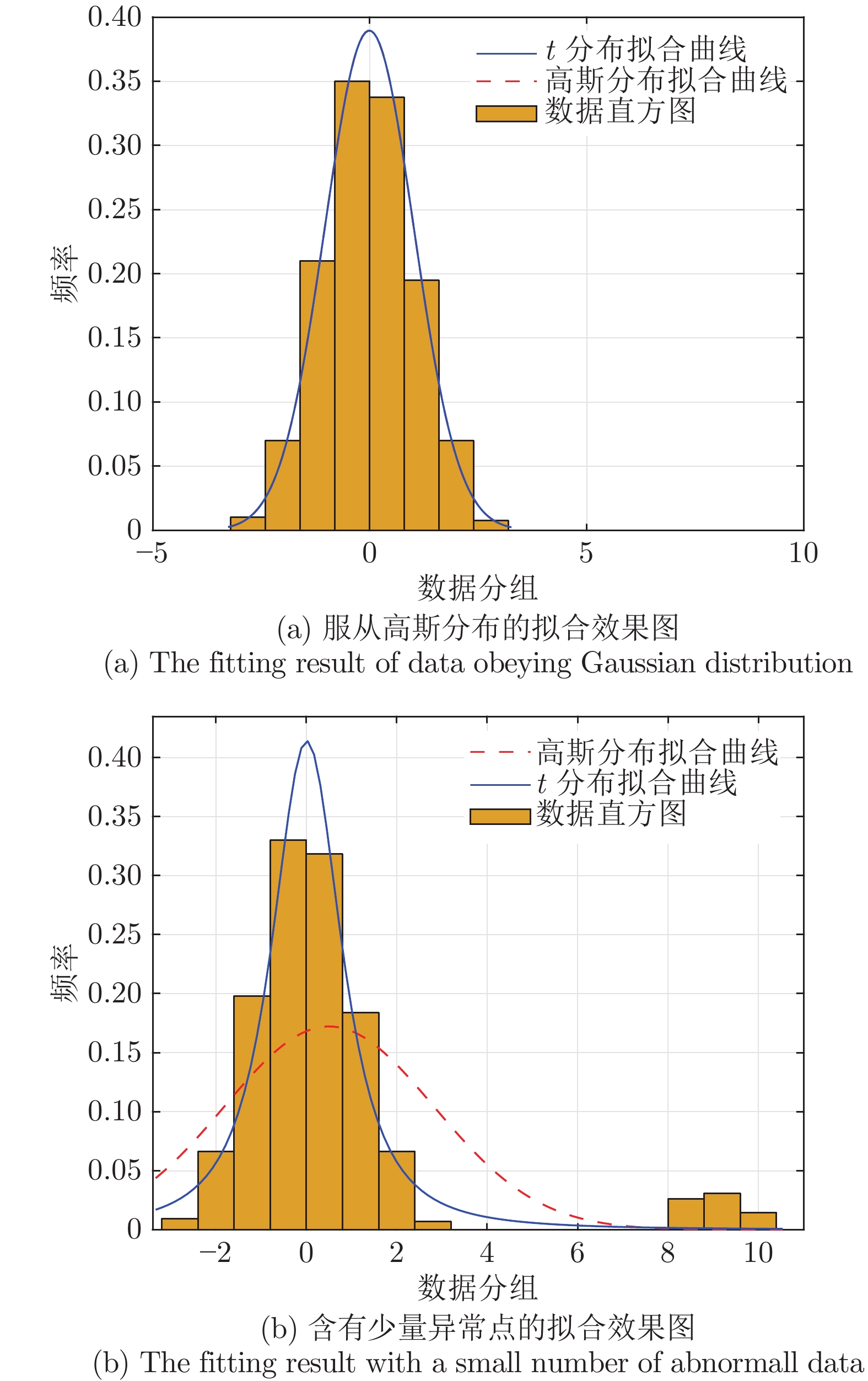
高速列车牵引系统在运行过程中总是受到诸多不确定因素的影响, 例如, 由于列车的负载、运行环境及元器件的老化引起的不确定性, 不确定因素不可避免地影响牵引系统剩余寿命的预测精度. 为了提高不确定情景下剩余寿命预测的准确性, 本文首先采用改进的相关向量机(Relevance vector machine, RVM)方法, 建立鲁棒性能良好的多步回归模型, 由于t分布比常用的高斯分布更具有鲁棒性, 通过权重和随机误差服从t分布而非高斯分布, 改进了相关向量机回归模型, 随后将超参数的先验一并融入似然函数, 通过最大化似然函数估计未知的超参数, 此外, 利用首达时间方法从概率角度对剩余寿命进行了预测, 最后通过牵引系统中电容器退化的案例, 与传统的相关向量机方法、自回归方法和支持向量机方法进行对比, 验证了所提算法的有效性.
高速列车牵引系统在运行过程中总是受到诸多不确定因素的影响, 例如, 由于列车的负载、运行环境及元器件的老化引起的不确定性, 不确定因素不可避免地影响牵引系统剩余寿命的预测精度. 为了提高不确定情景下剩余寿命预测的准确性, 本文首先采用改进的相关向量机(Relevance vector machine, RVM)方法, 建立鲁棒性能良好的多步回归模型, 由于t分布比常用的高斯分布更具有鲁棒性, 通过权重和随机误差服从t分布而非高斯分布, 改进了相关向量机回归模型, 随后将超参数的先验一并融入似然函数, 通过最大化似然函数估计未知的超参数, 此外, 利用首达时间方法从概率角度对剩余寿命进行了预测, 最后通过牵引系统中电容器退化的案例, 与传统的相关向量机方法、自回归方法和支持向量机方法进行对比, 验证了所提算法的有效性.

2019, 45(12): 2312-2327.
doi: 10.16383/j.aas.c190143
cstr: 32138.14.j.aas.c190143
摘要:
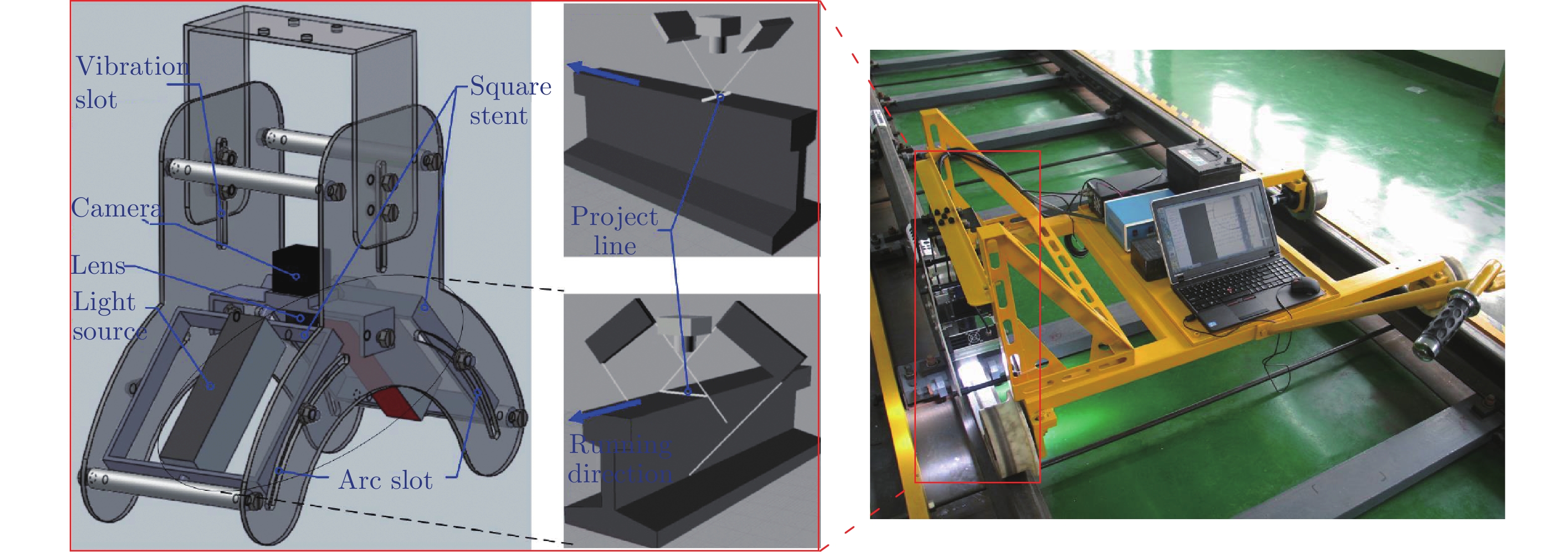
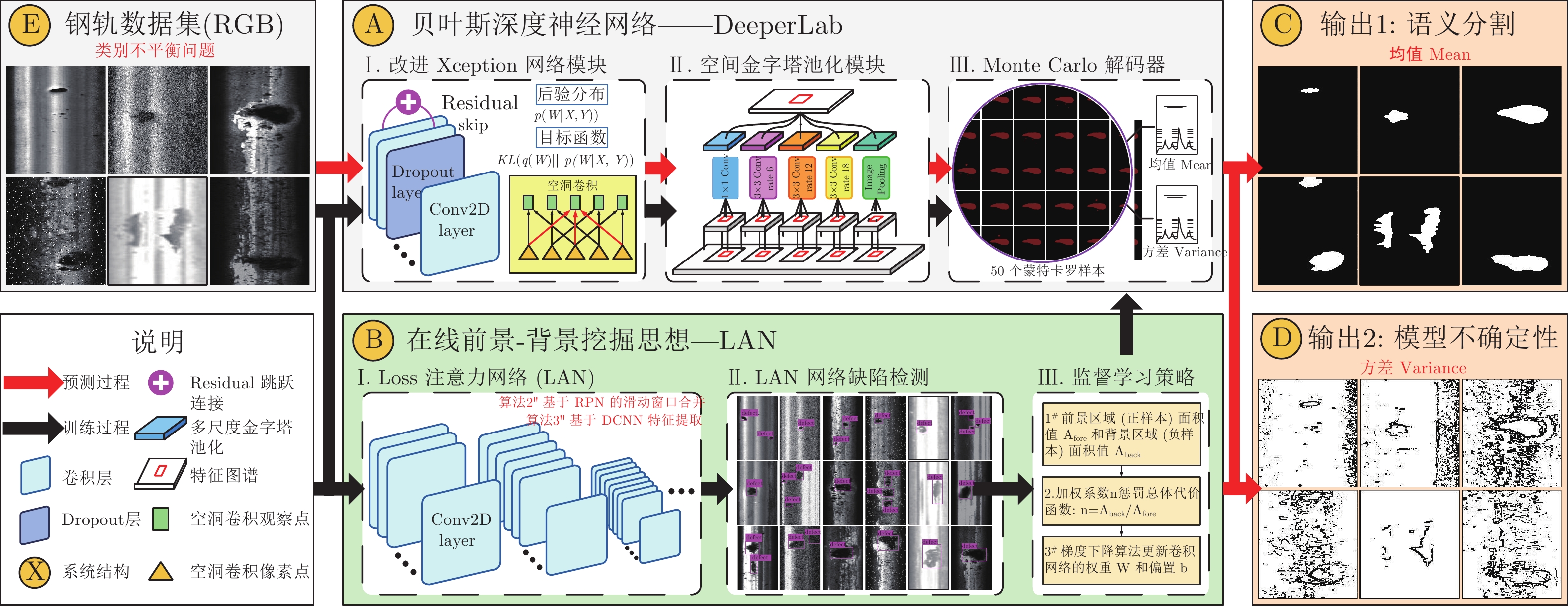
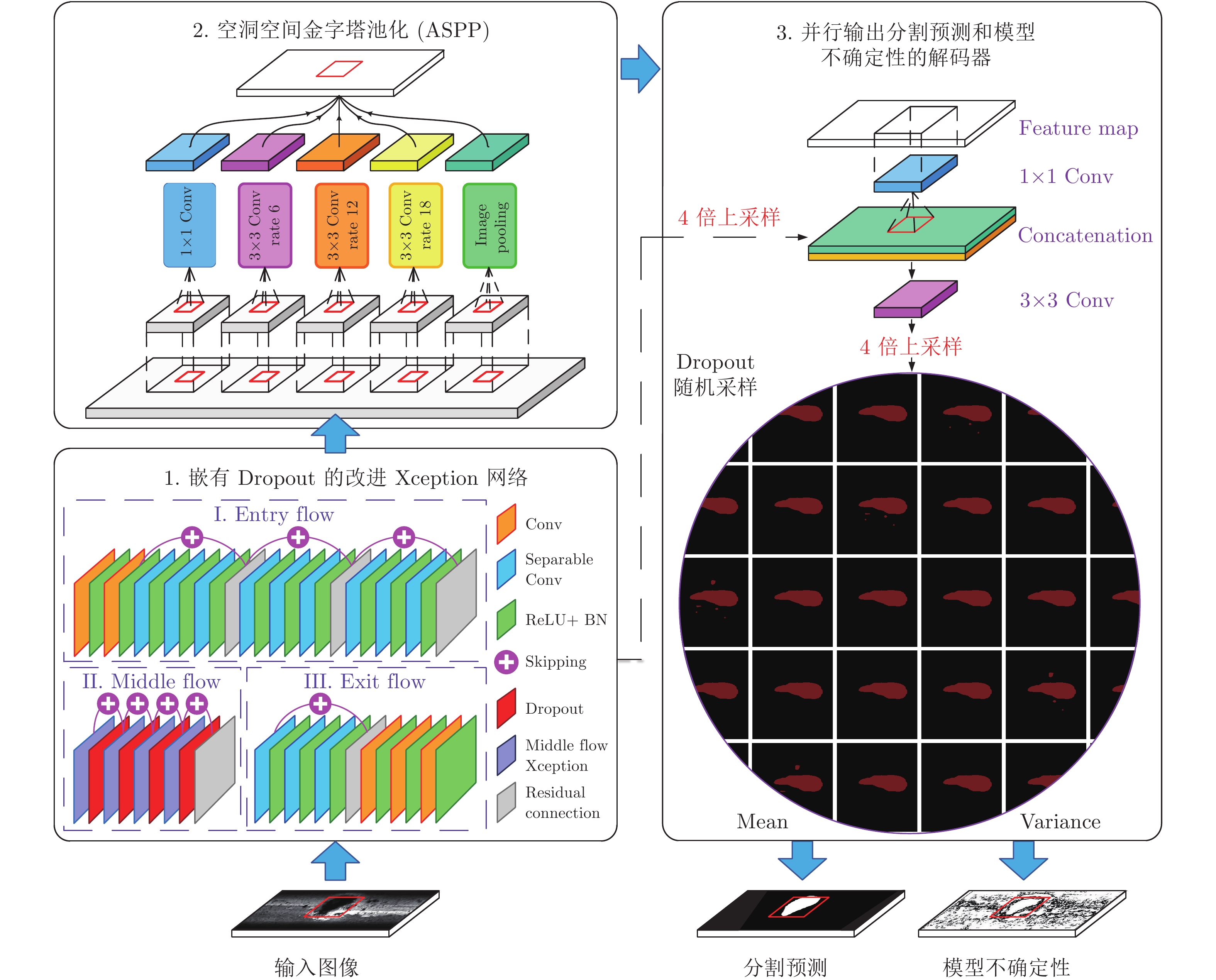
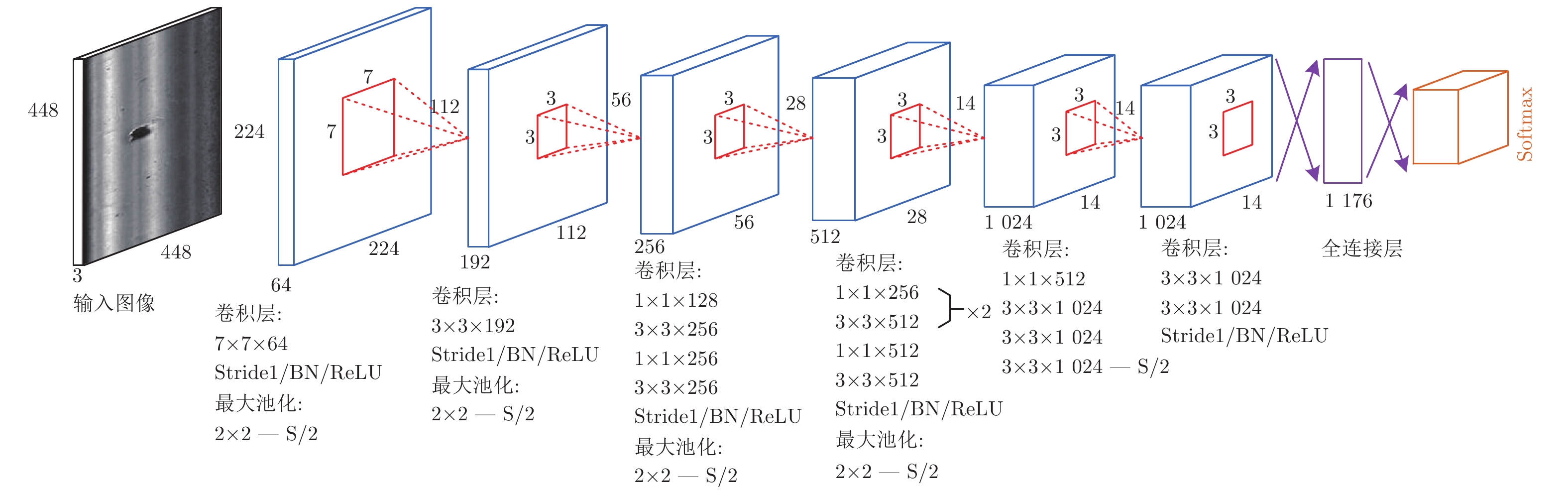
面向复杂多样的钢轨场景, 本文扩展了最先进的深度学习语义分割框架DeepLab v3+ 到一个新的轻量级、可伸缩性的贝叶斯版本DeeperLab, 实现表面缺陷的概率分割. 具体地, Dropout被融入改进的Xception网络, 使得从后验分布中生成蒙特卡罗样本; 其次, 提出多尺度多速率的空洞空间金字塔池化(Atrous spatial pyramid pooling, ASPP)模块, 提取任意分辨率下的密集特征图谱; 更简单有效的解码器细化目标的边界, 计算Softmax概率的均值和方差作为分割预测和不确定性. 为解决类别不平衡问题, 基于在线前景 − 背景挖掘思想, 提出损失注意力网络(Loss attention network, LAN)定位缺陷以计算惩罚系数, 从而补偿和抑制DeeperLab的前景与背景损失, 实现辅助监督训练. 实验结果表明本文算法具有91.46 %分割精度和0.18 s/帧的运行速度, 相比其他方法更加快速鲁棒.
面向复杂多样的钢轨场景, 本文扩展了最先进的深度学习语义分割框架DeepLab v3+ 到一个新的轻量级、可伸缩性的贝叶斯版本DeeperLab, 实现表面缺陷的概率分割. 具体地, Dropout被融入改进的Xception网络, 使得从后验分布中生成蒙特卡罗样本; 其次, 提出多尺度多速率的空洞空间金字塔池化(Atrous spatial pyramid pooling, ASPP)模块, 提取任意分辨率下的密集特征图谱; 更简单有效的解码器细化目标的边界, 计算Softmax概率的均值和方差作为分割预测和不确定性. 为解决类别不平衡问题, 基于在线前景 − 背景挖掘思想, 提出损失注意力网络(Loss attention network, LAN)定位缺陷以计算惩罚系数, 从而补偿和抑制DeeperLab的前景与背景损失, 实现辅助监督训练. 实验结果表明本文算法具有91.46 %分割精度和0.18 s/帧的运行速度, 相比其他方法更加快速鲁棒.






2019, 45(12): 2328-2343.
doi: 10.16383/j.aas.c190179
cstr: 32138.14.j.aas.c190179
摘要:
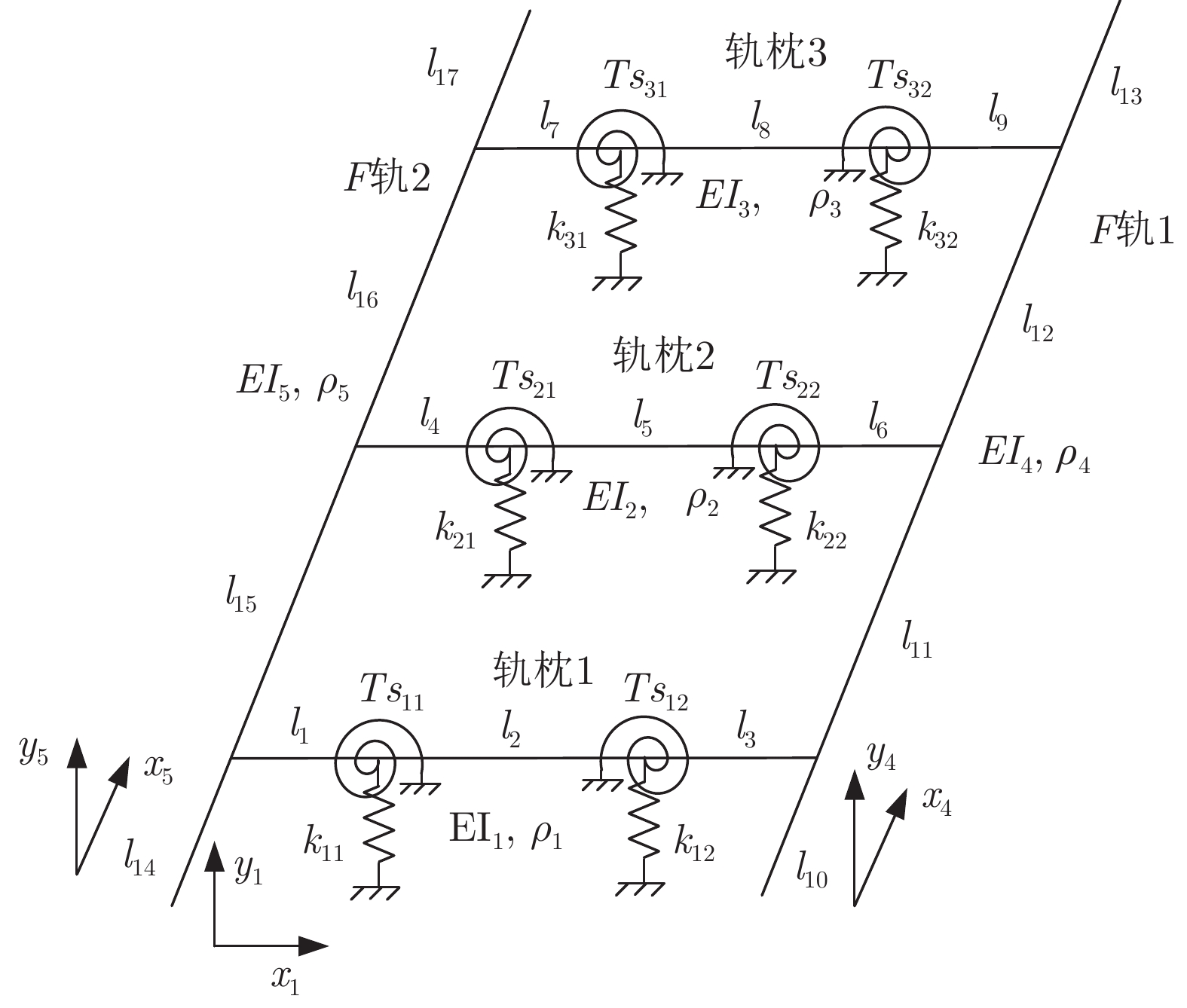
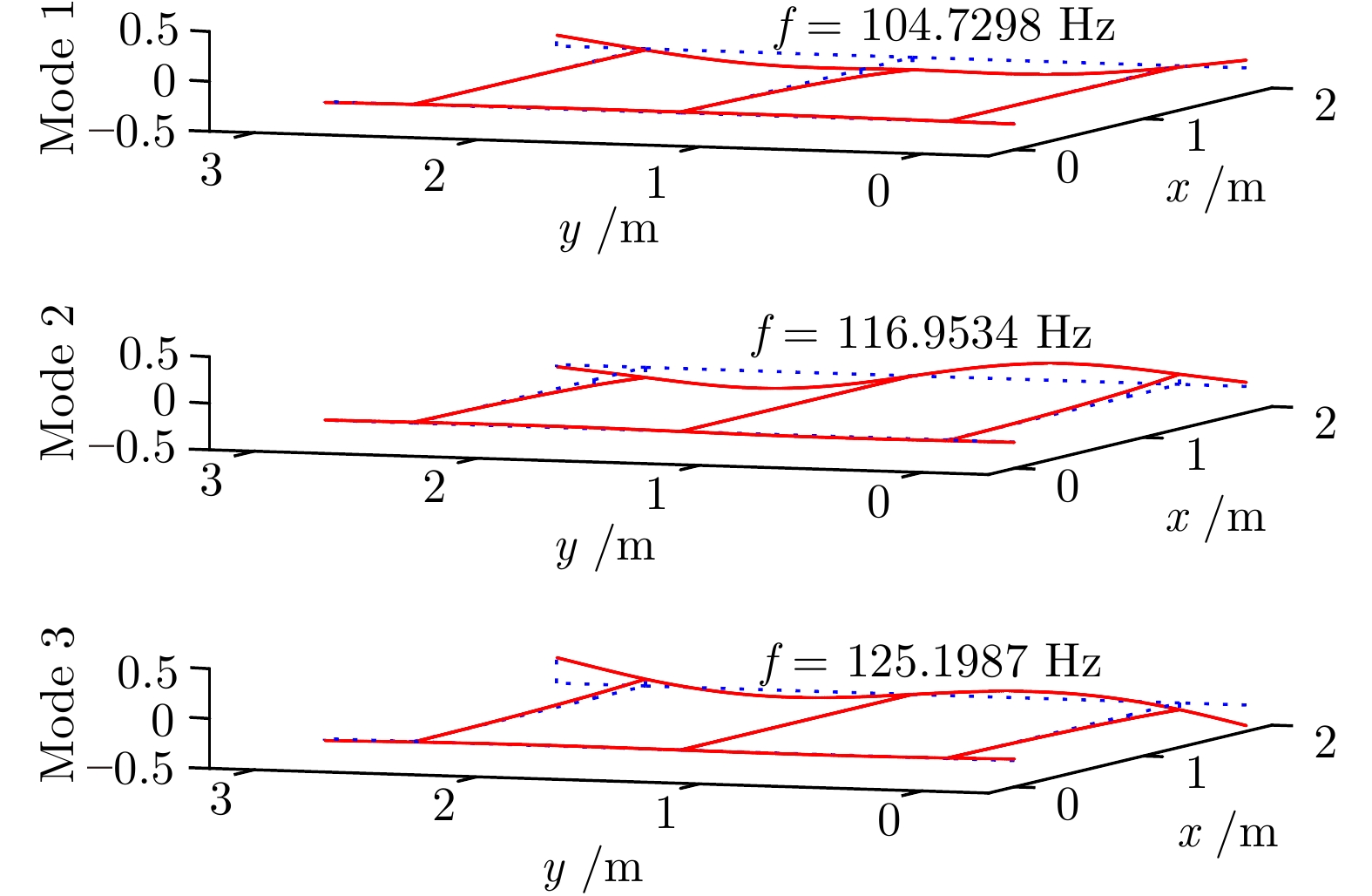
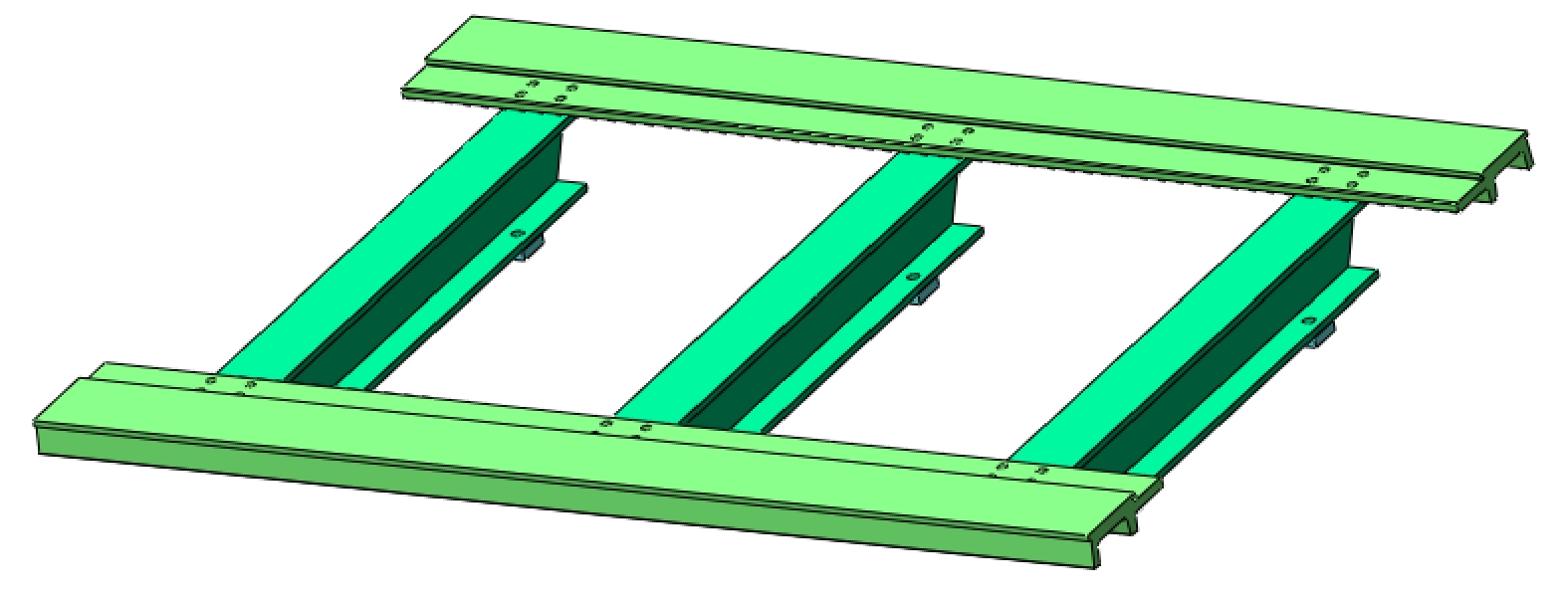
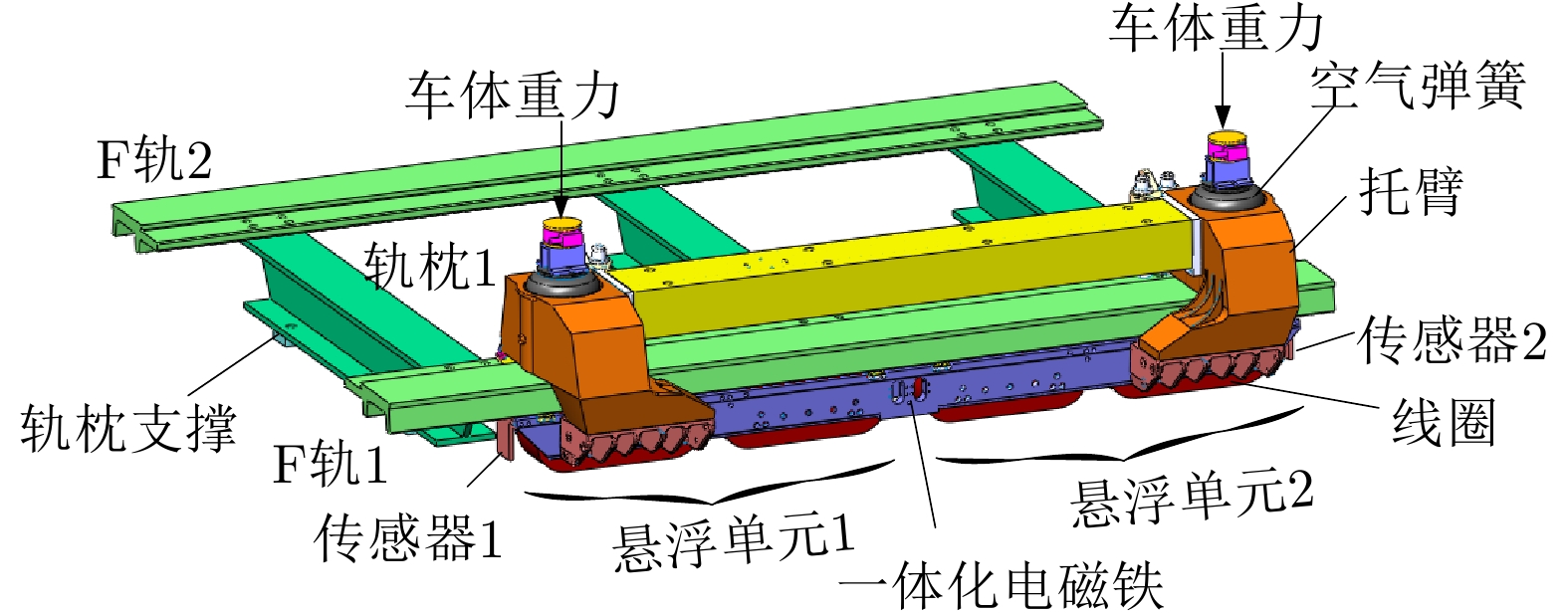
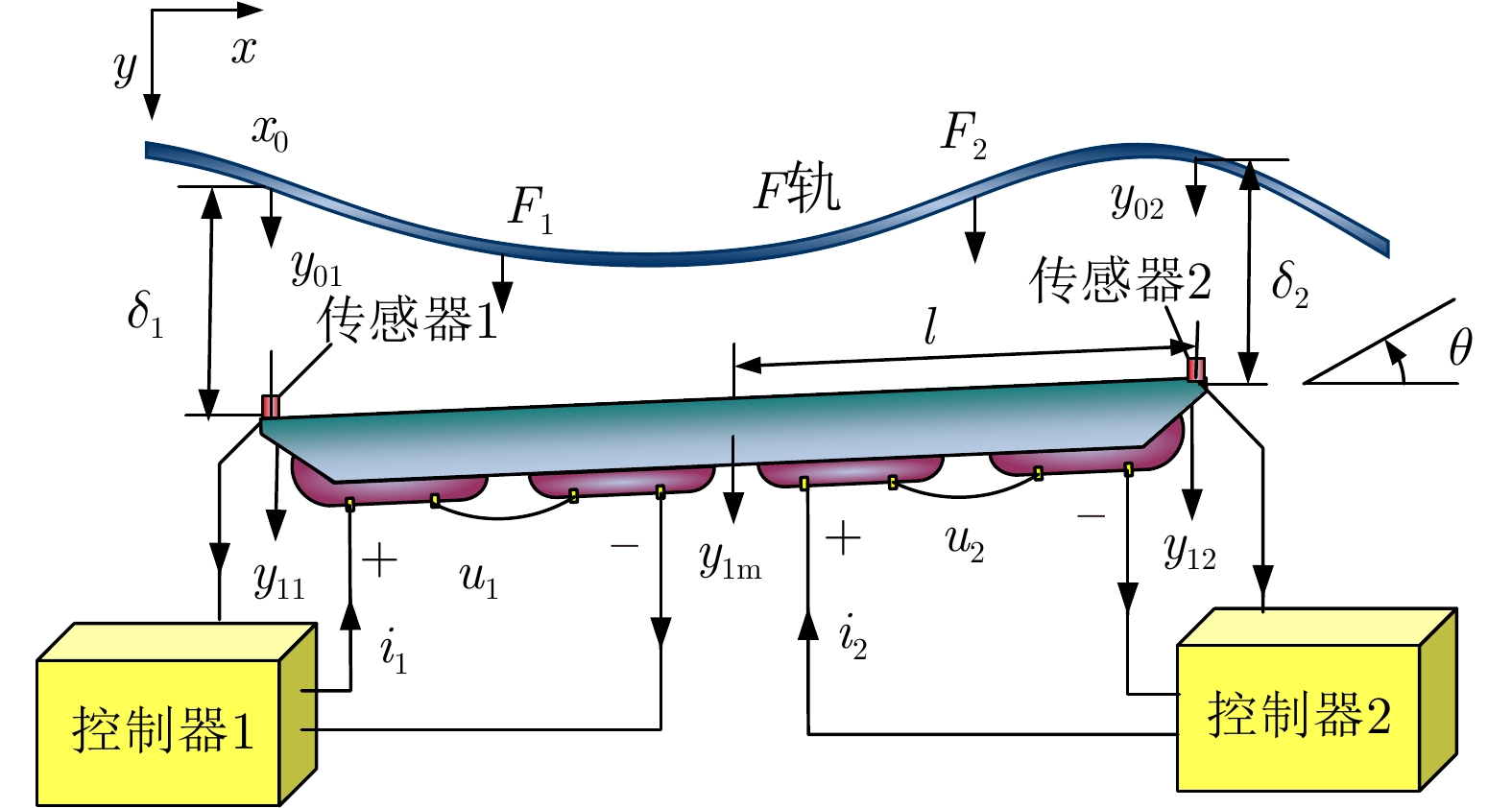
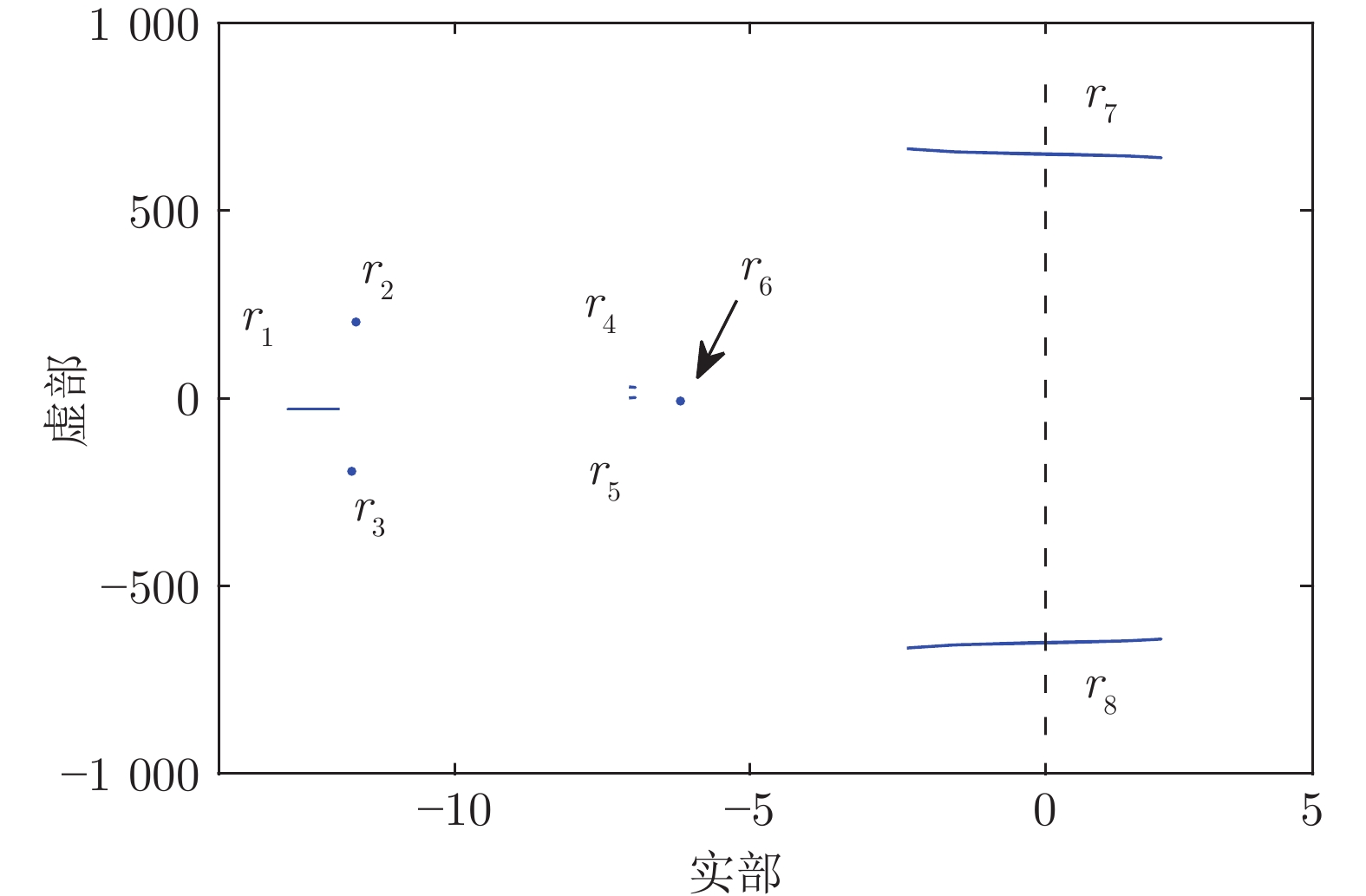
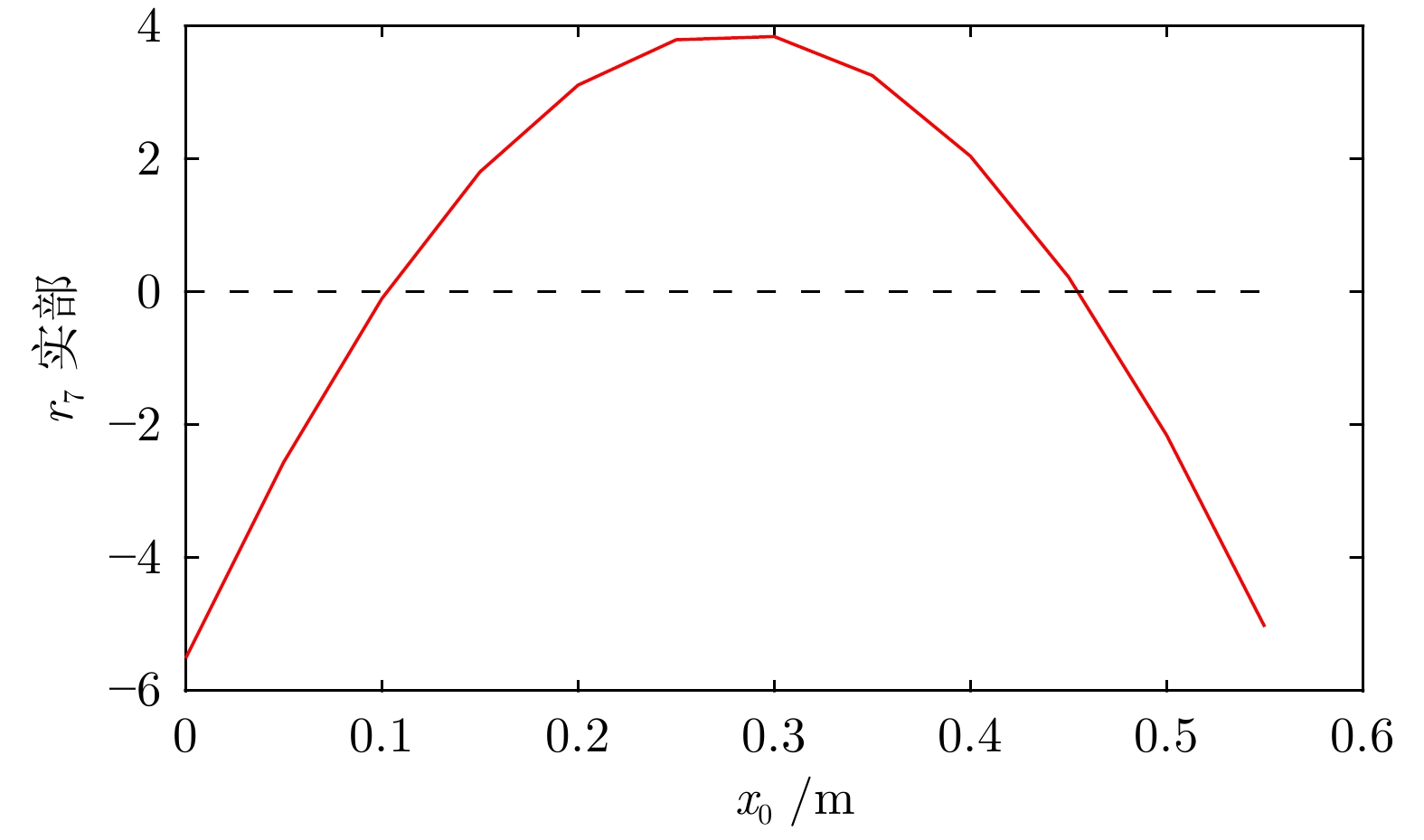
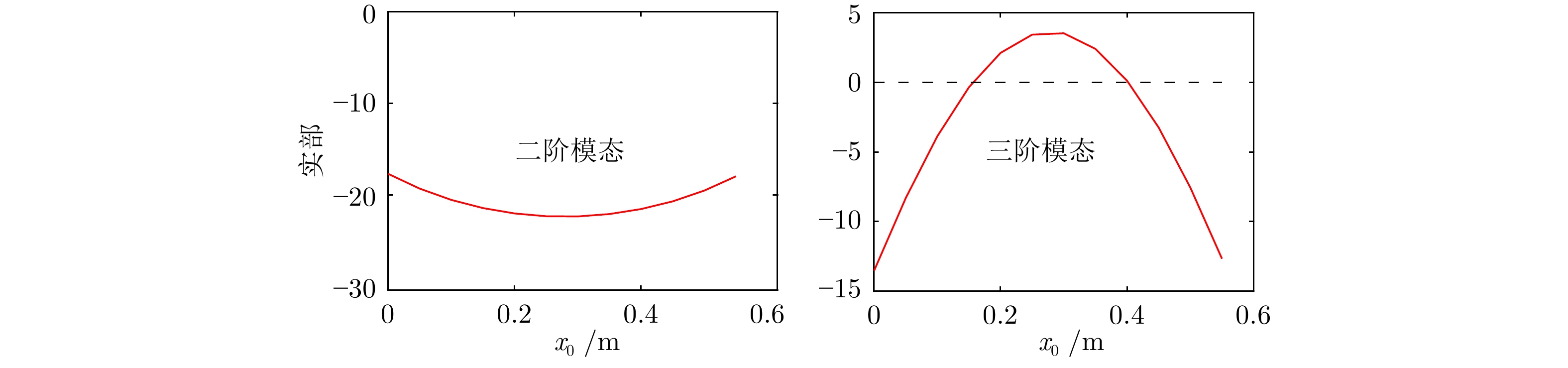
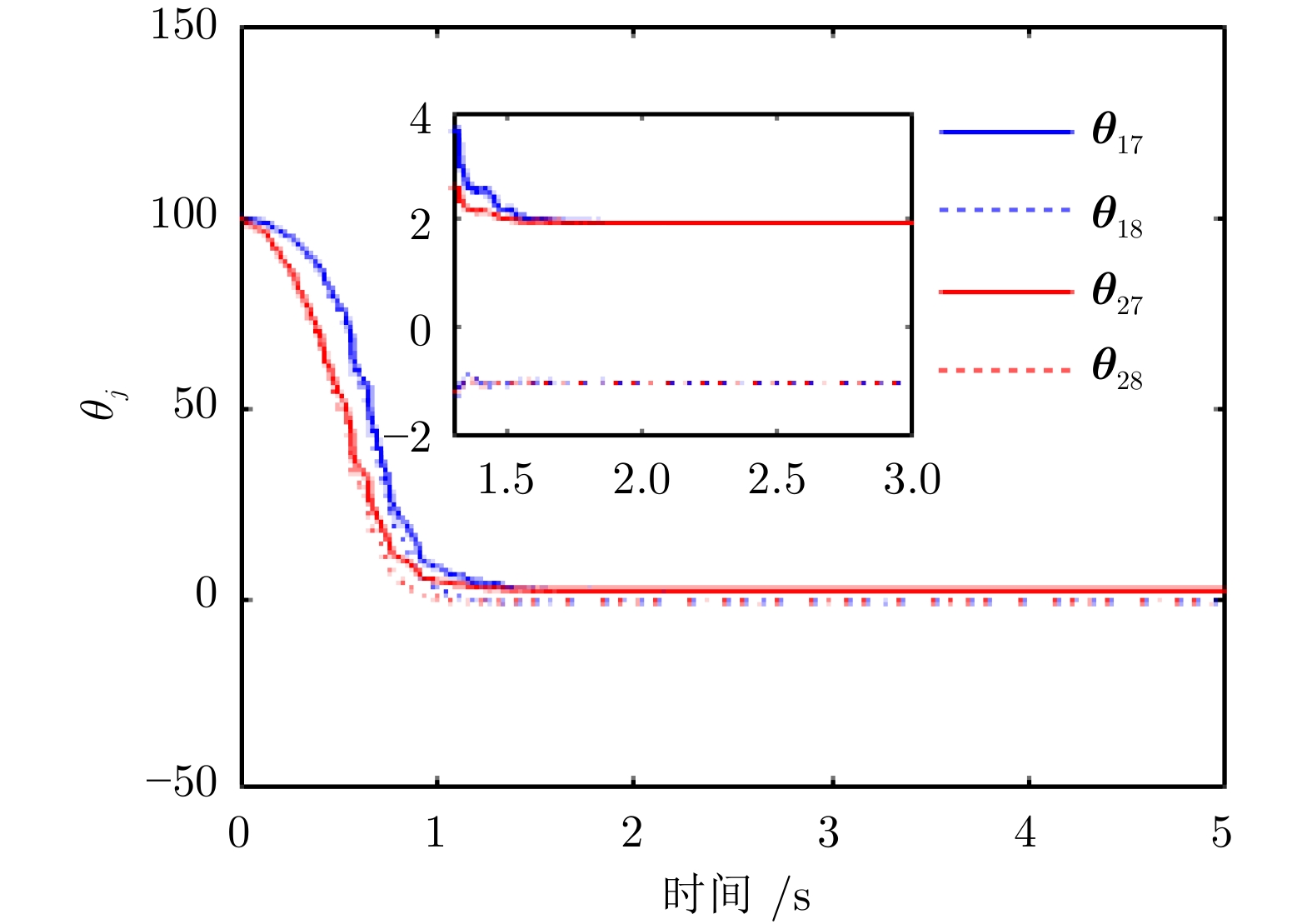
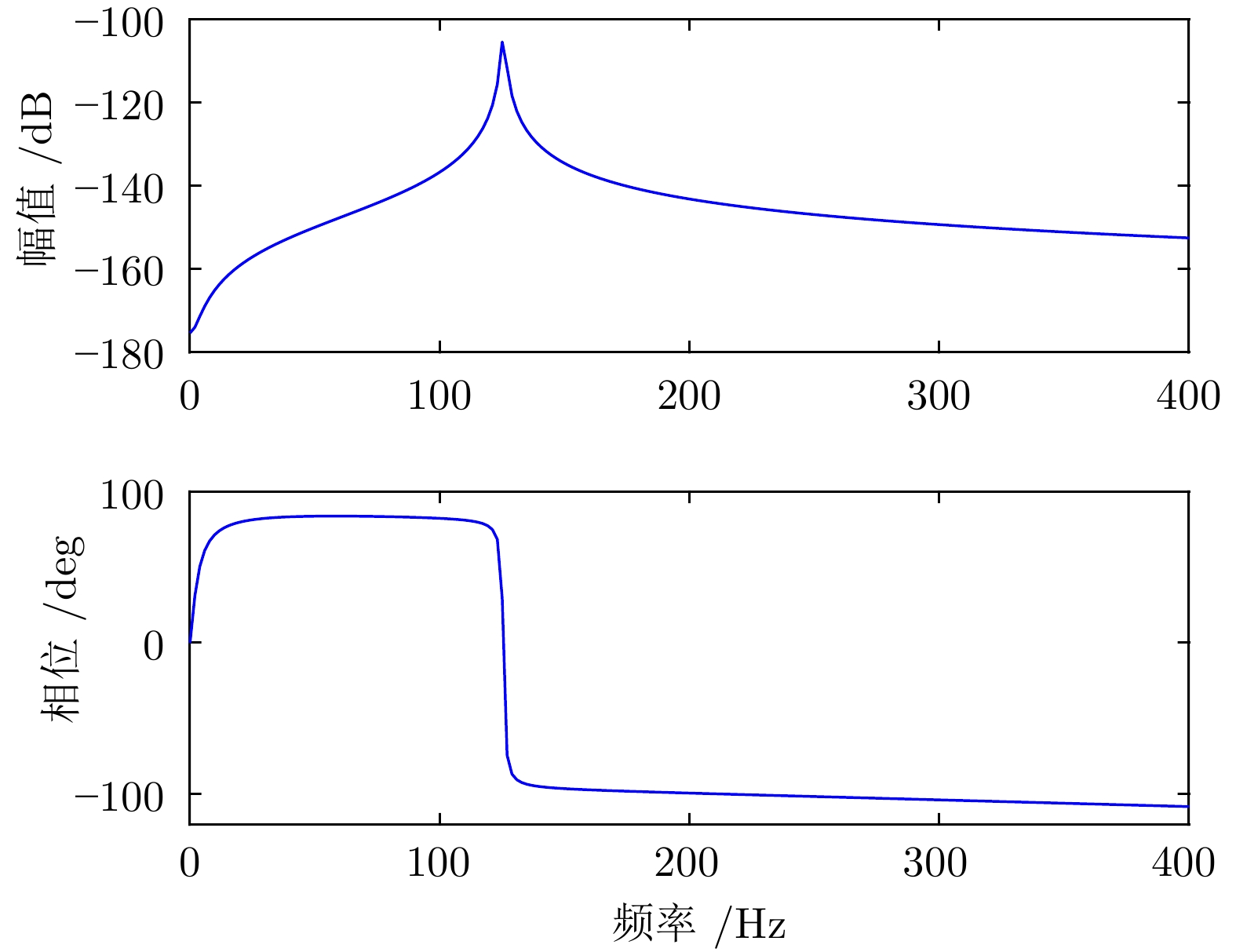
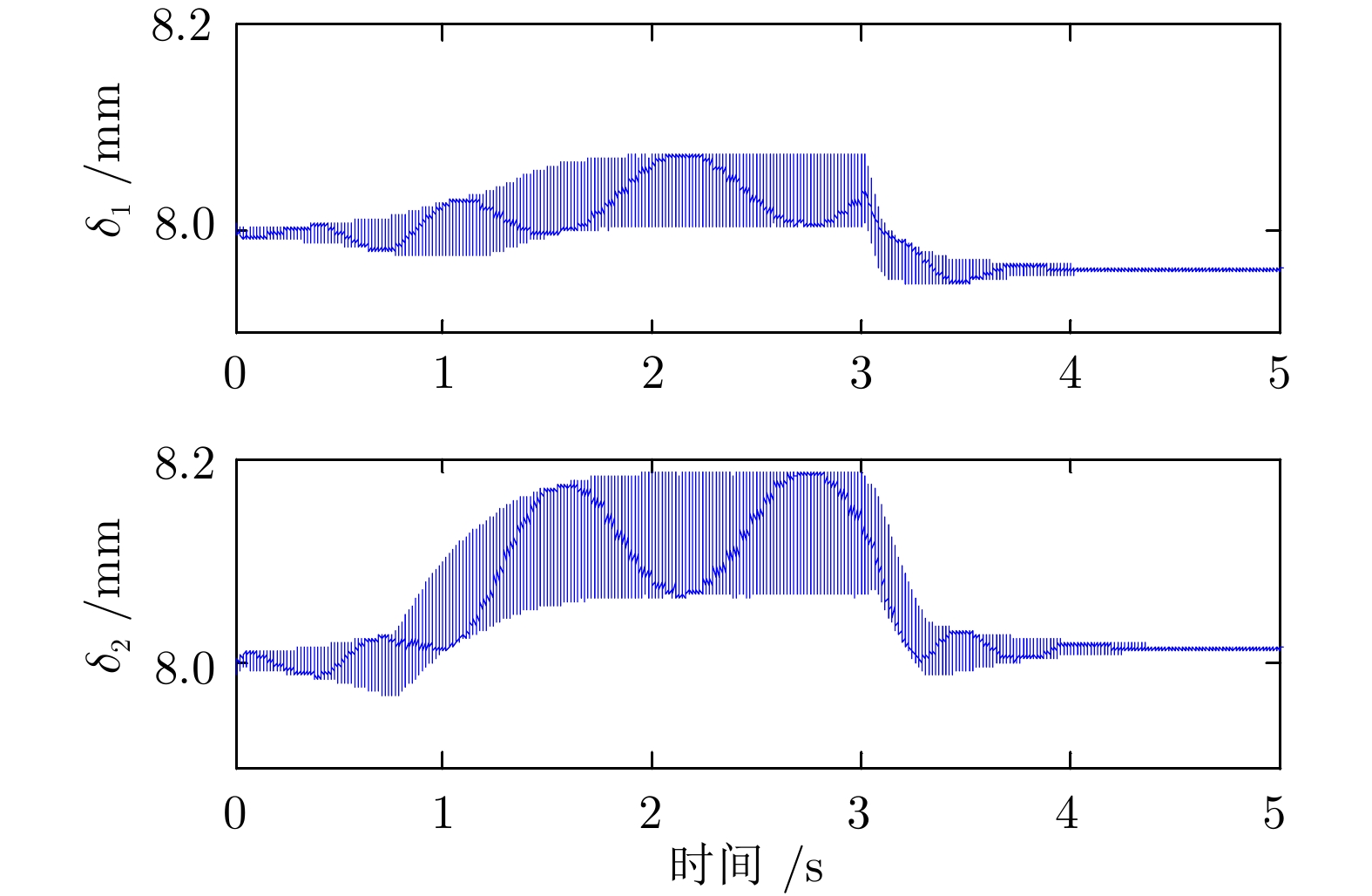
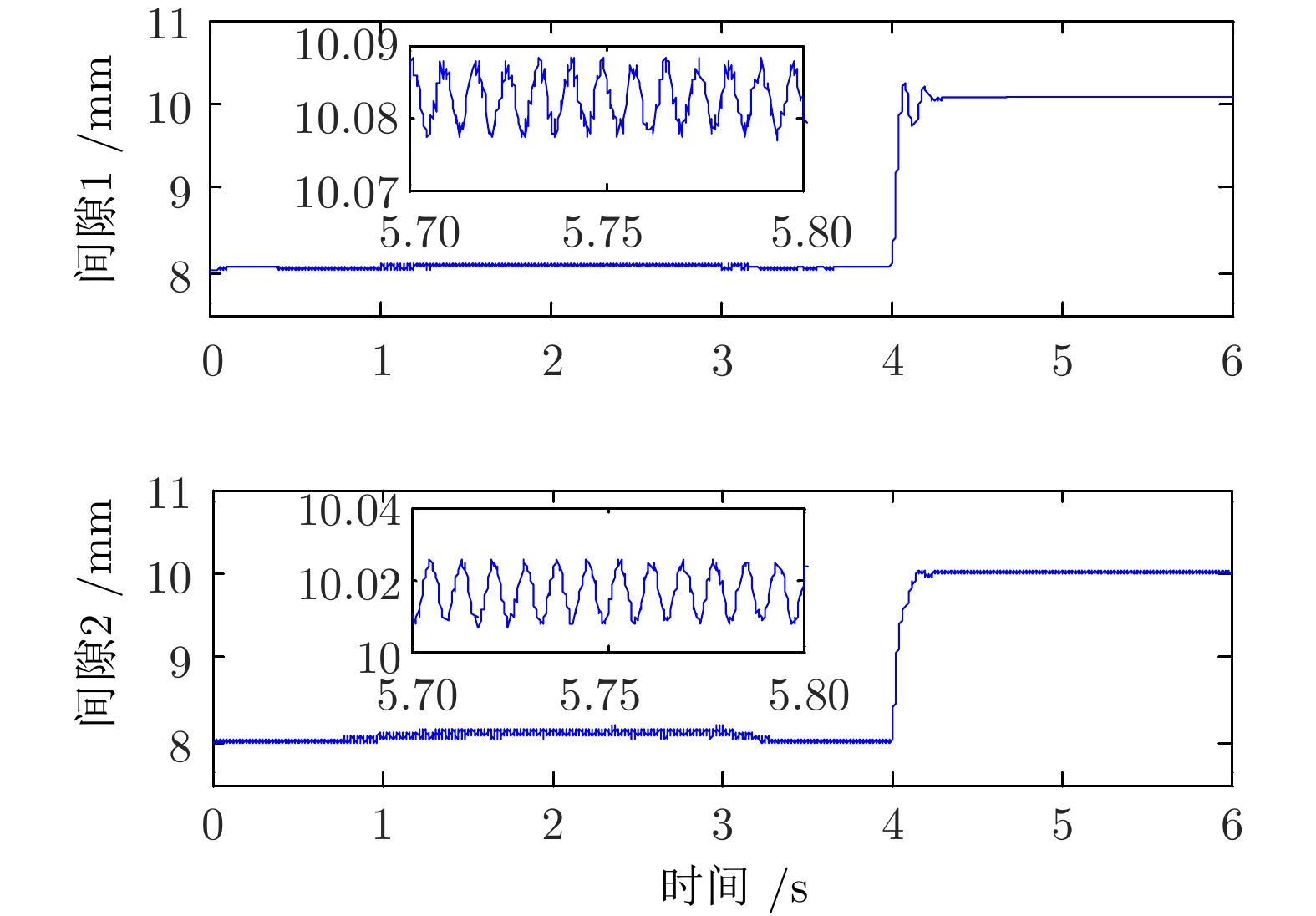
本文针对中低速磁浮交通的轨排自激振动问题, 首先建立了包括轨枕、导轨在内的多跨磁浮轨排动力学模型, 通过理论方法分析轨排的模态振型、频率等关键参数. 其次, 建立了包含一体化电磁铁的悬浮模块的动力学模型, 并与轨排模型结合建立轨排 − 悬浮模块耦合模型, 分析了耦合系统失稳发生自激振动的原因. 提出了一种带辨识器的自适应振动控制方法, 能够实时辨识轨排的主要动力学参数, 并由此产生自适应振动控制律.相比现有的轨排振动控制方法, 该方法具有更好的稳定性和环境适应性.
本文针对中低速磁浮交通的轨排自激振动问题, 首先建立了包括轨枕、导轨在内的多跨磁浮轨排动力学模型, 通过理论方法分析轨排的模态振型、频率等关键参数. 其次, 建立了包含一体化电磁铁的悬浮模块的动力学模型, 并与轨排模型结合建立轨排 − 悬浮模块耦合模型, 分析了耦合系统失稳发生自激振动的原因. 提出了一种带辨识器的自适应振动控制方法, 能够实时辨识轨排的主要动力学参数, 并由此产生自适应振动控制律.相比现有的轨排振动控制方法, 该方法具有更好的稳定性和环境适应性.






2019, 45(12): 2344-2354.
doi: 10.16383/j.aas.c190211
cstr: 32138.14.j.aas.c190211
摘要:
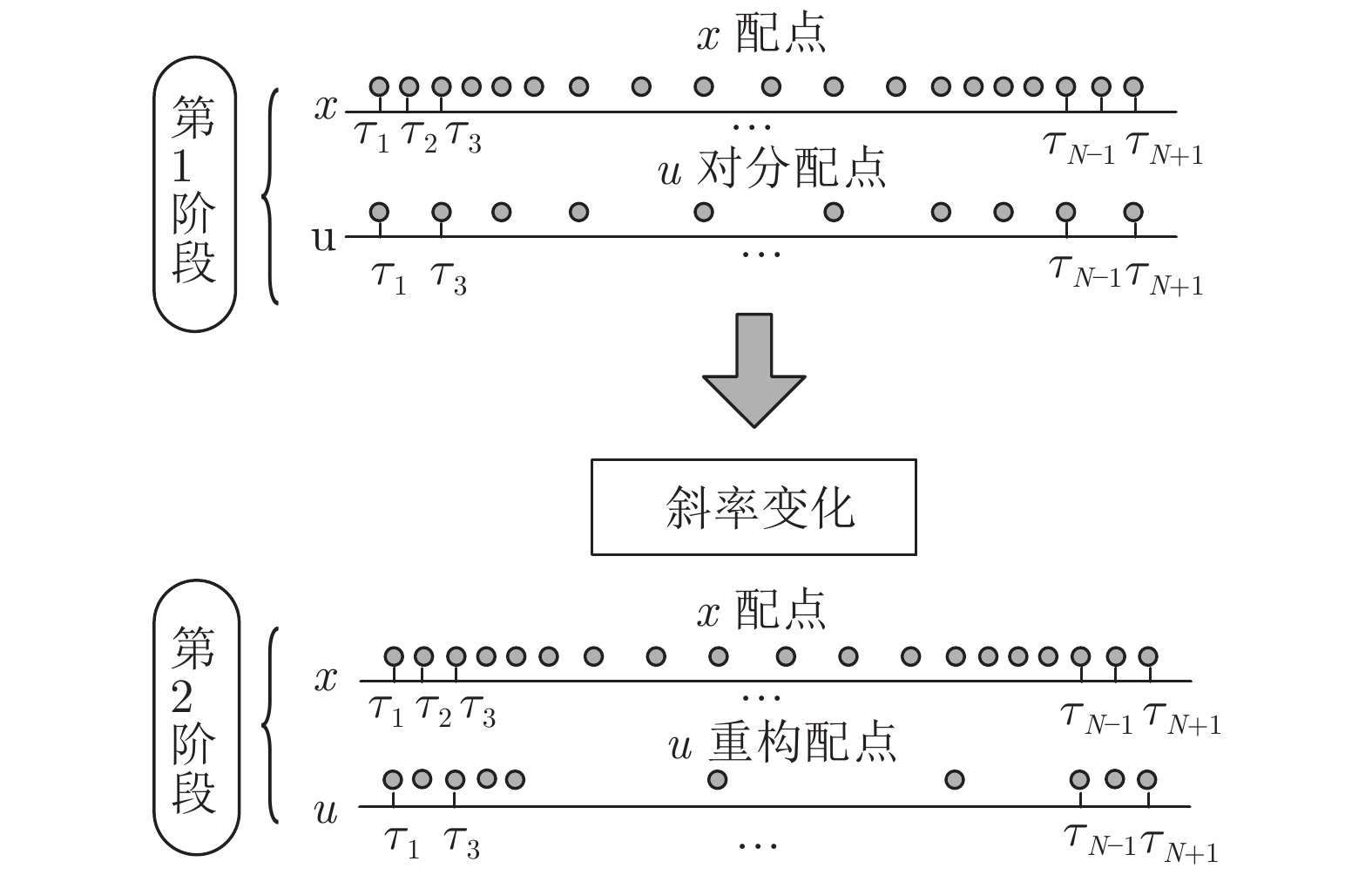
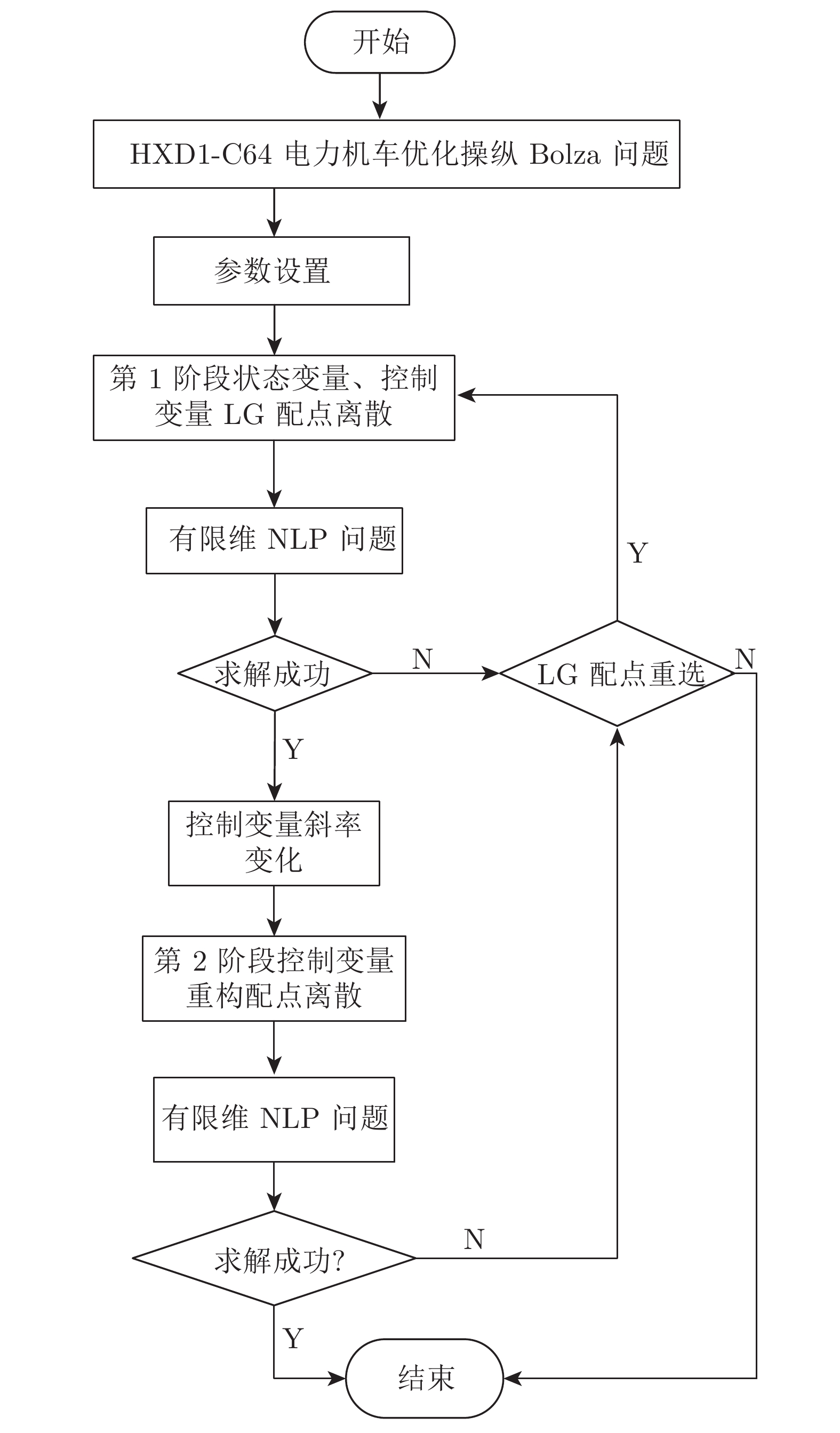
针对中车株洲电力机车有限公司设计的HXD1-C64电力机车, 提出一种基于两阶段自适应Gauss配点重构的伪谱法, 用于列车优化操纵问题高效快速求解. 首先, 建立了HXD1-C64电力机车优化操纵数学模型; 然后, 在推导Legendre-Gauss配点公式的基础上, 给出控制变量两阶段自适应Gauss配点策略, 第1阶段采用对分配点, 第2阶段引入斜率变化分析对控制变量配点进行自适应细分和合并; 最后, 在运行时间最短目标下对HXD1-C64电力机车优化操纵进行仿真实验. 结果显示, 相较于控制变量参数化方法和传统高斯伪谱方法(Gauss pseudospectral method, GPM), 改进方法获得了更优性能指标和牵引力控制品质, 计算时间分别减少91.93 %和33.88 %, 表明了所提方法的有效性.
针对中车株洲电力机车有限公司设计的HXD1-C64电力机车, 提出一种基于两阶段自适应Gauss配点重构的伪谱法, 用于列车优化操纵问题高效快速求解. 首先, 建立了HXD1-C64电力机车优化操纵数学模型; 然后, 在推导Legendre-Gauss配点公式的基础上, 给出控制变量两阶段自适应Gauss配点策略, 第1阶段采用对分配点, 第2阶段引入斜率变化分析对控制变量配点进行自适应细分和合并; 最后, 在运行时间最短目标下对HXD1-C64电力机车优化操纵进行仿真实验. 结果显示, 相较于控制变量参数化方法和传统高斯伪谱方法(Gauss pseudospectral method, GPM), 改进方法获得了更优性能指标和牵引力控制品质, 计算时间分别减少91.93 %和33.88 %, 表明了所提方法的有效性.





2019, 45(12): 2355-2365.
doi: 10.16383/j.aas.c190223
cstr: 32138.14.j.aas.c190223
摘要:
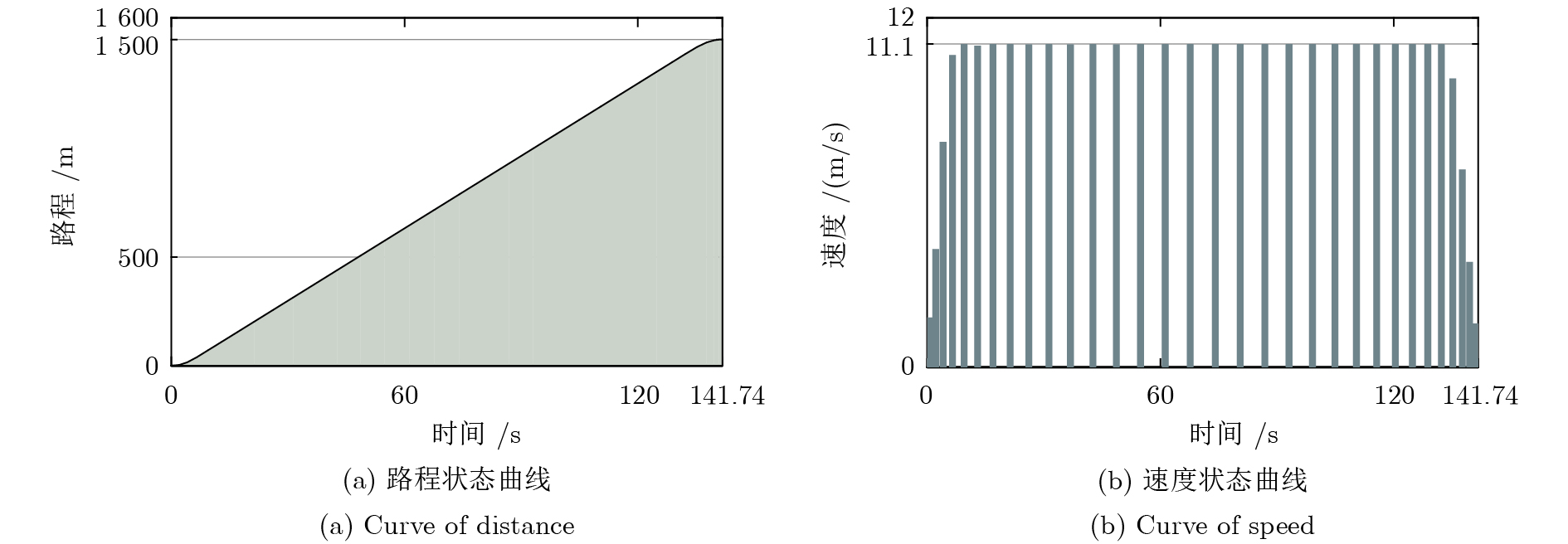
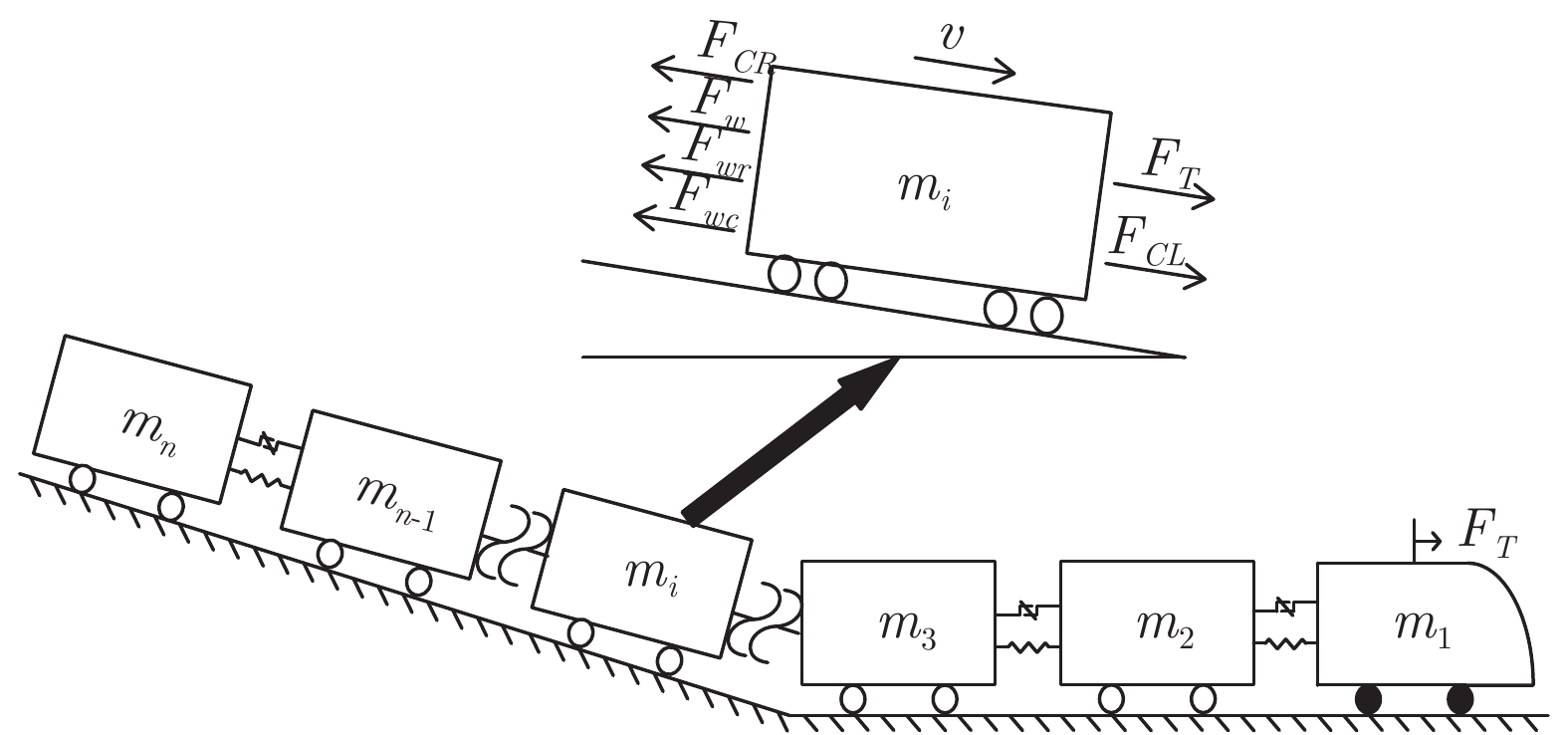
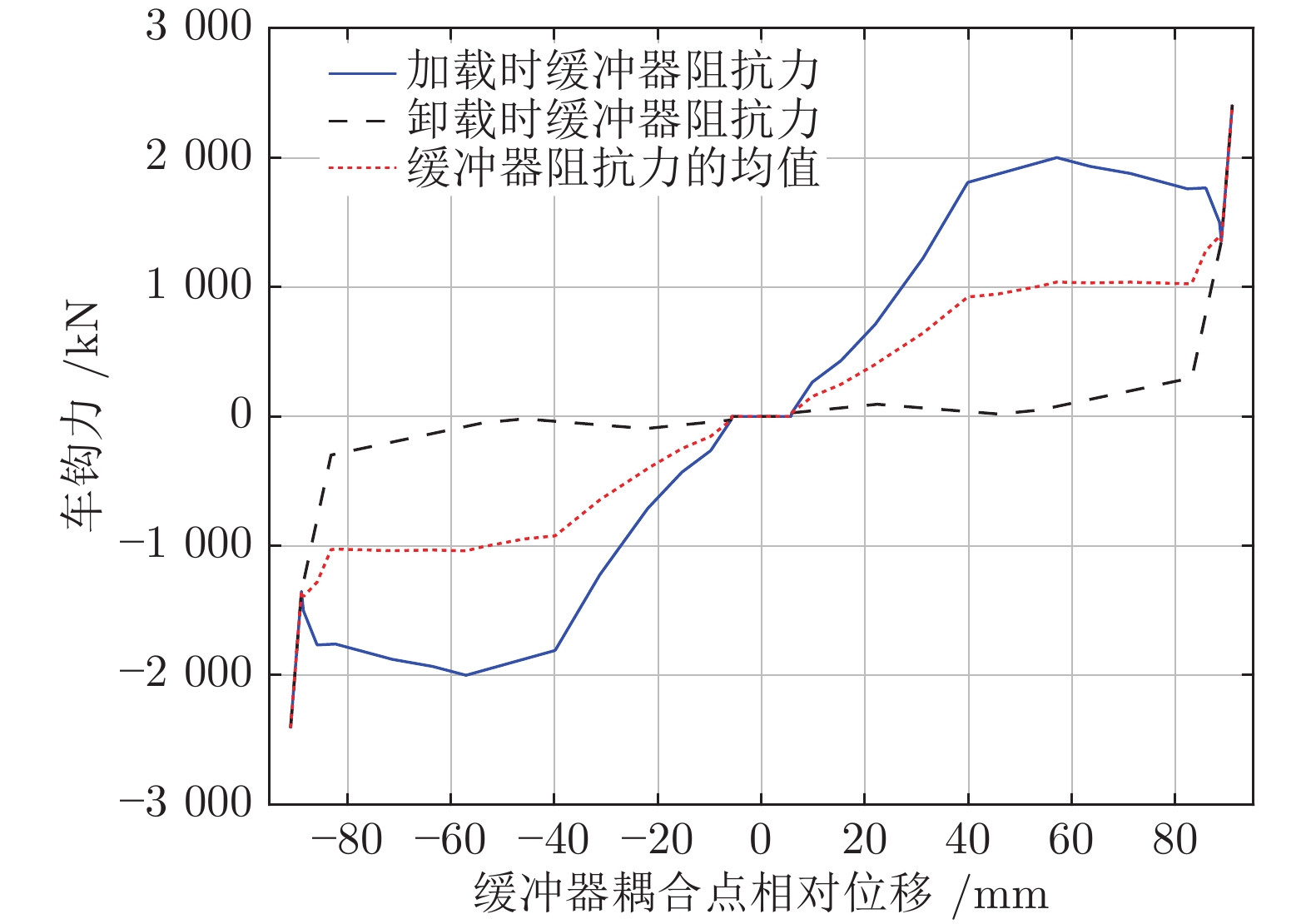
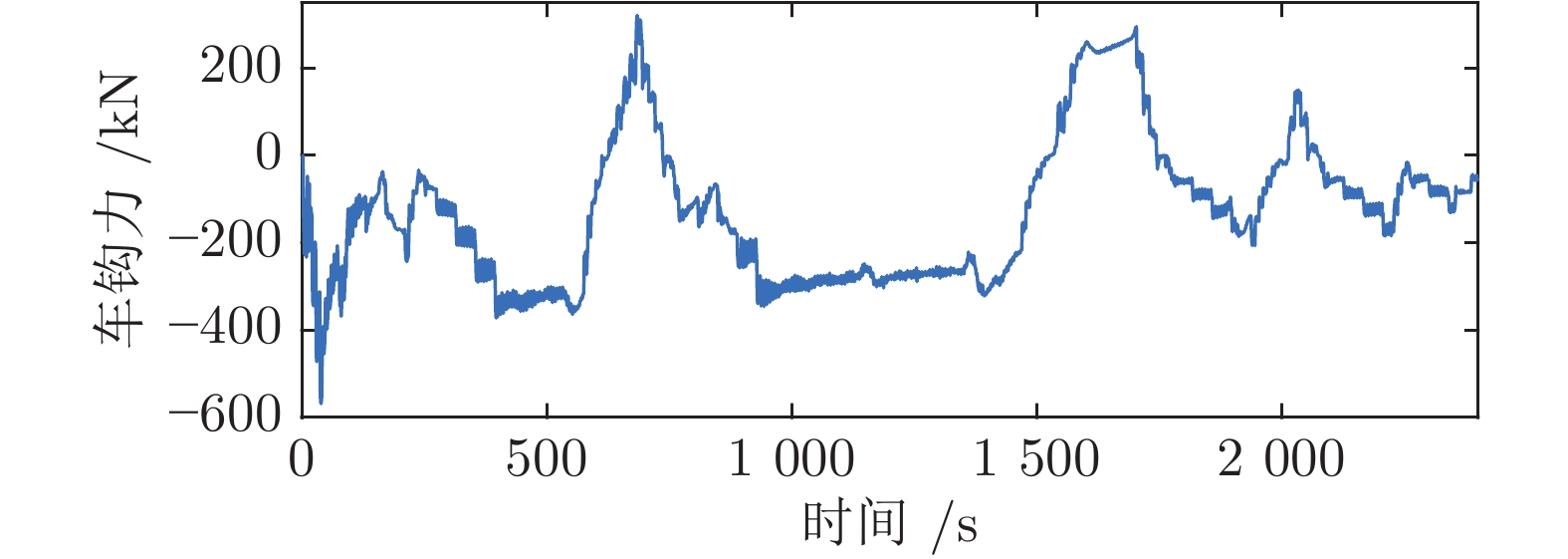
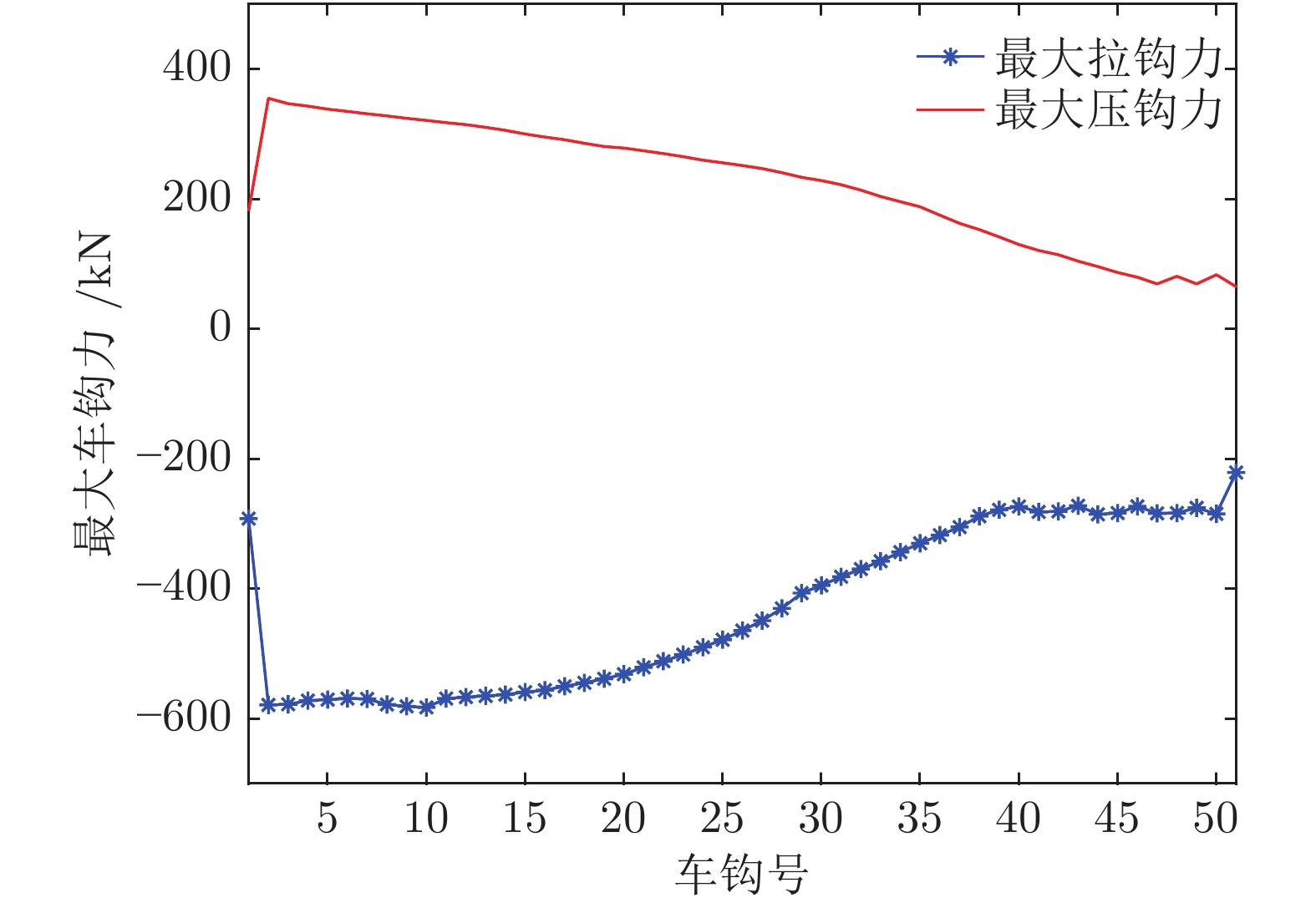
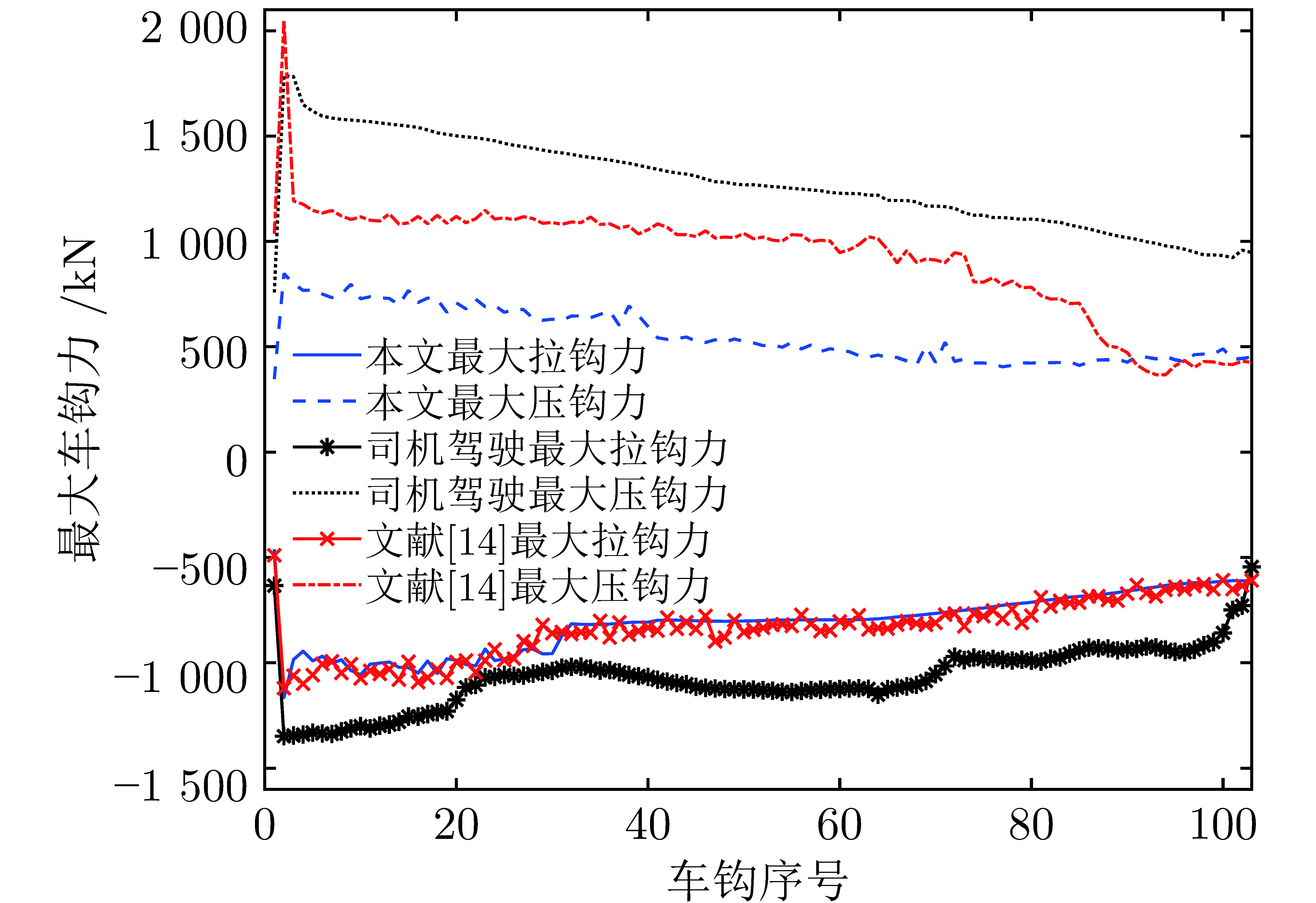
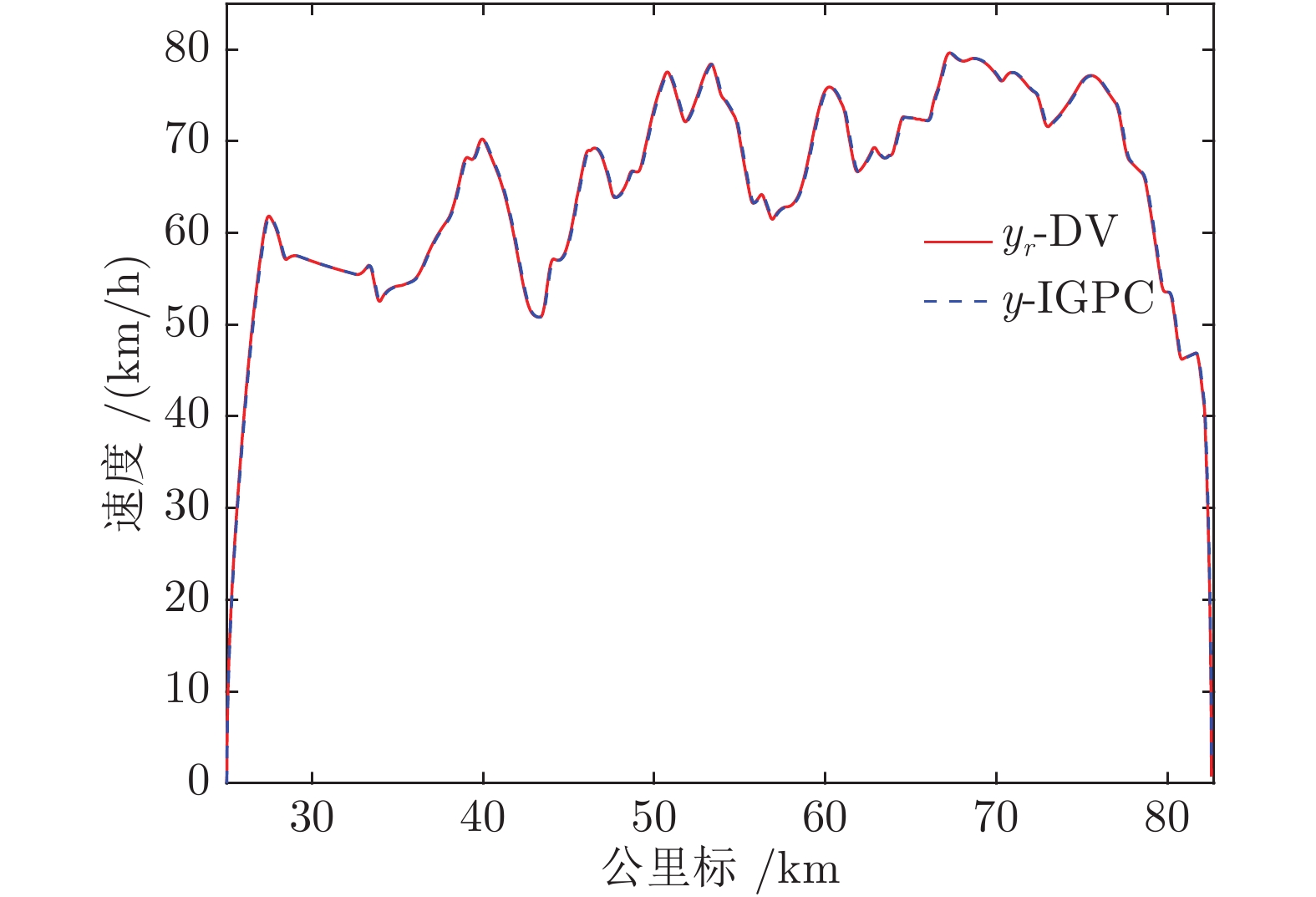
重载列车是一种由上百甚至几百节车厢组成的动力集中式大载重系统, 其牵引力/制动力需通过车钩相继传递给车厢, 存在明显的非线性和大滞后性. 现有的人工驾驶模式, 司机难以考虑车厢之间的钩缓约束, 易引起车钩断裂和脱轨; 且运行性能与司机的操纵经验密切相关, 存在耗电大, 无法按照列车运行图正点运行等问题. 本文针对此关键问题, 以实现重载列车安全、正点、节能运行为目标, 开展其驾驶过程运行优化研究. 分析列车钩缓系统受力原理, 基于其特性曲线, 采用翟方法构造重载列车钩缓模型及整车纵向动力学模型; 据此, 考虑钩缓约束运用多目标自适应遗传算法, 结合实际运行线路(限速、坡道、曲线率等)约束条件设定列车理想的运行速度目标曲线; 最后, 采用改进广义预测控制器设计重载列车驾驶过程优化控制方法, 跟踪理想速度目标曲线安全、正点、低能耗运行. 基于大秦线上HXD1型重载列车实际数据的仿真结果表明本文所设计的理想目标速度曲线优化方法可以较好地改善列车运行中的安全, 正点和节能等关键性指标, 运行优化控制能保证列车精确跟踪理想速度目标曲线, 实现其驾驶过程优化运行.
重载列车是一种由上百甚至几百节车厢组成的动力集中式大载重系统, 其牵引力/制动力需通过车钩相继传递给车厢, 存在明显的非线性和大滞后性. 现有的人工驾驶模式, 司机难以考虑车厢之间的钩缓约束, 易引起车钩断裂和脱轨; 且运行性能与司机的操纵经验密切相关, 存在耗电大, 无法按照列车运行图正点运行等问题. 本文针对此关键问题, 以实现重载列车安全、正点、节能运行为目标, 开展其驾驶过程运行优化研究. 分析列车钩缓系统受力原理, 基于其特性曲线, 采用翟方法构造重载列车钩缓模型及整车纵向动力学模型; 据此, 考虑钩缓约束运用多目标自适应遗传算法, 结合实际运行线路(限速、坡道、曲线率等)约束条件设定列车理想的运行速度目标曲线; 最后, 采用改进广义预测控制器设计重载列车驾驶过程优化控制方法, 跟踪理想速度目标曲线安全、正点、低能耗运行. 基于大秦线上HXD1型重载列车实际数据的仿真结果表明本文所设计的理想目标速度曲线优化方法可以较好地改善列车运行中的安全, 正点和节能等关键性指标, 运行优化控制能保证列车精确跟踪理想速度目标曲线, 实现其驾驶过程优化运行.







2019, 45(12): 2366-2377.
doi: 10.16383/j.aas.c190164
cstr: 32138.14.j.aas.c190164
摘要:
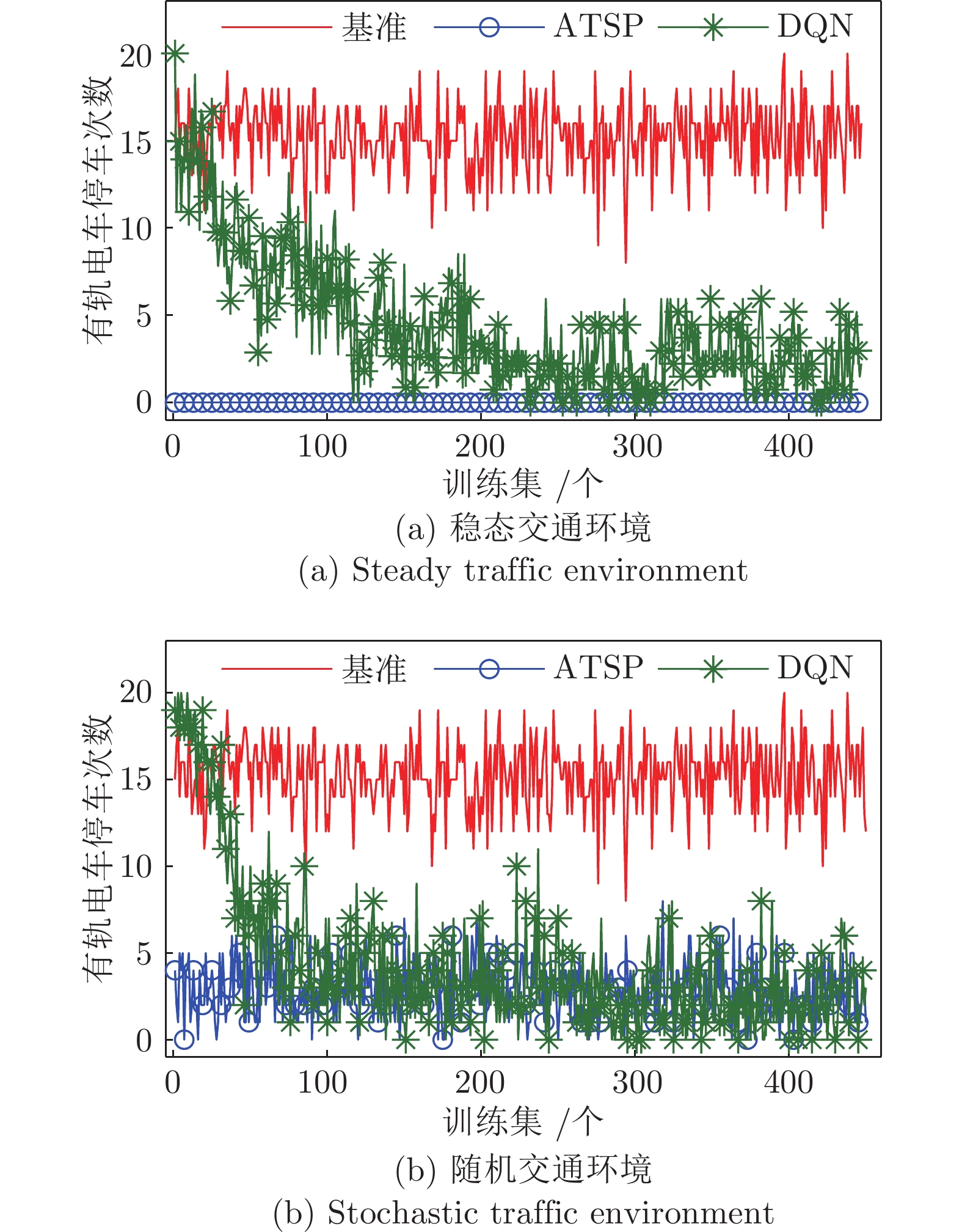
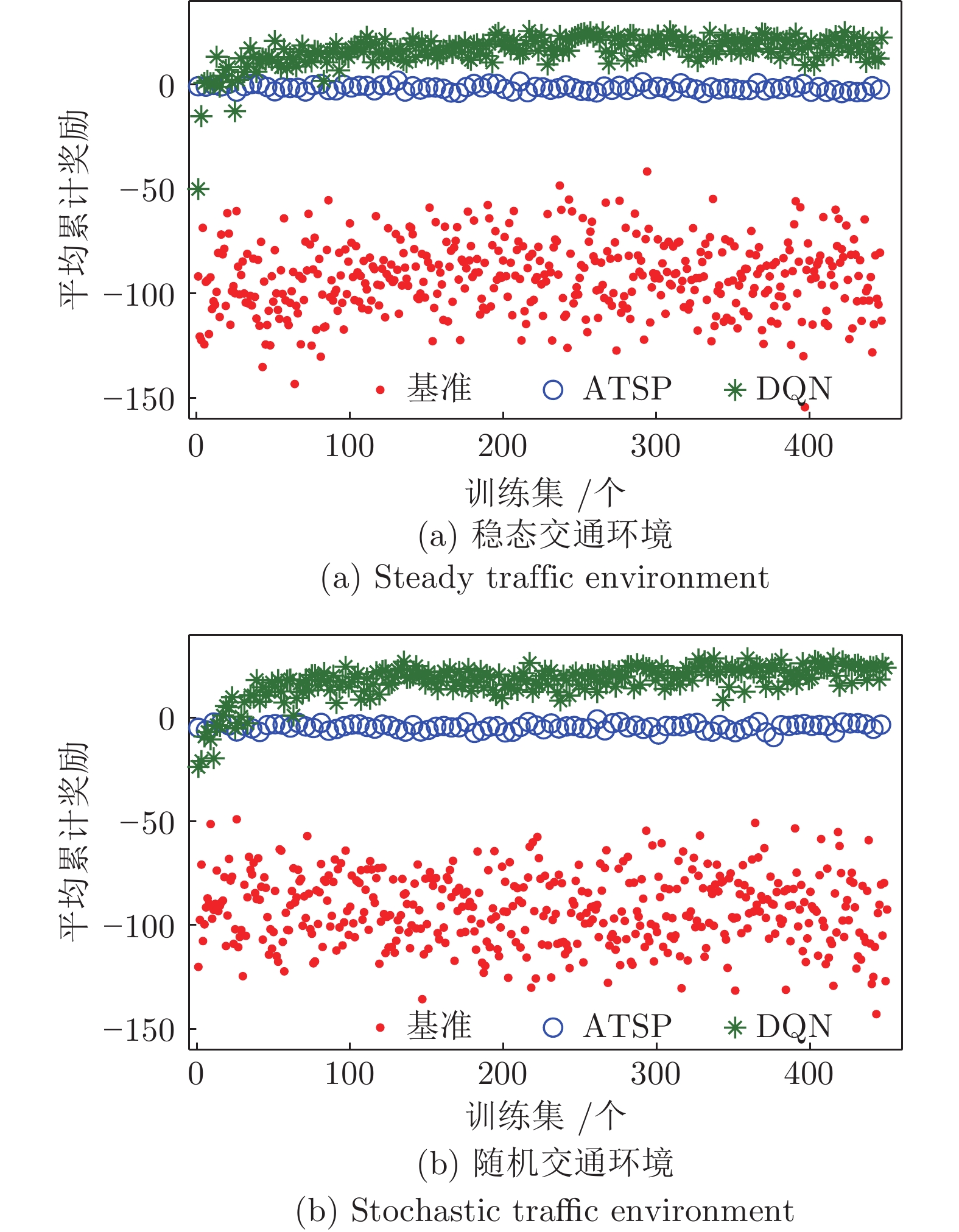
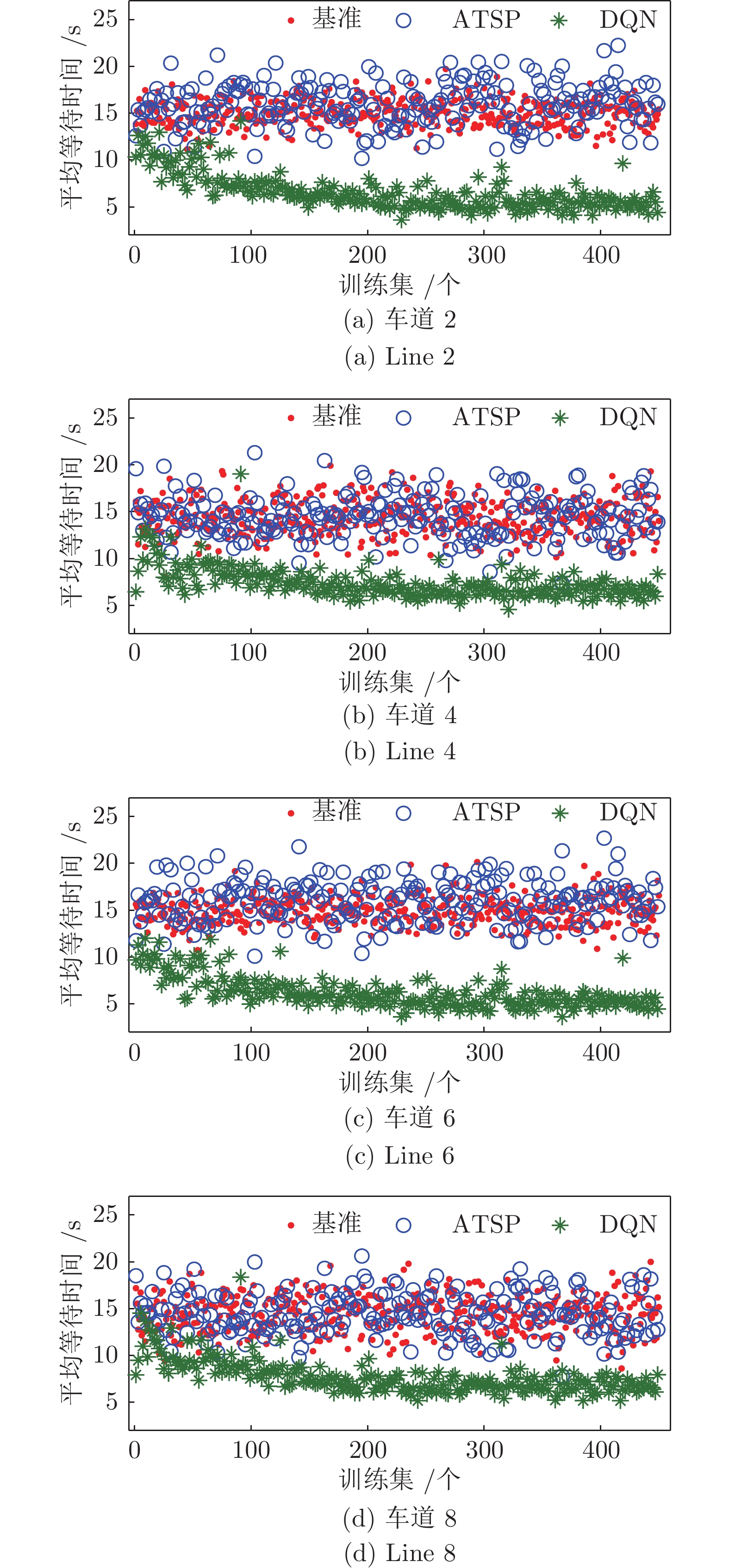
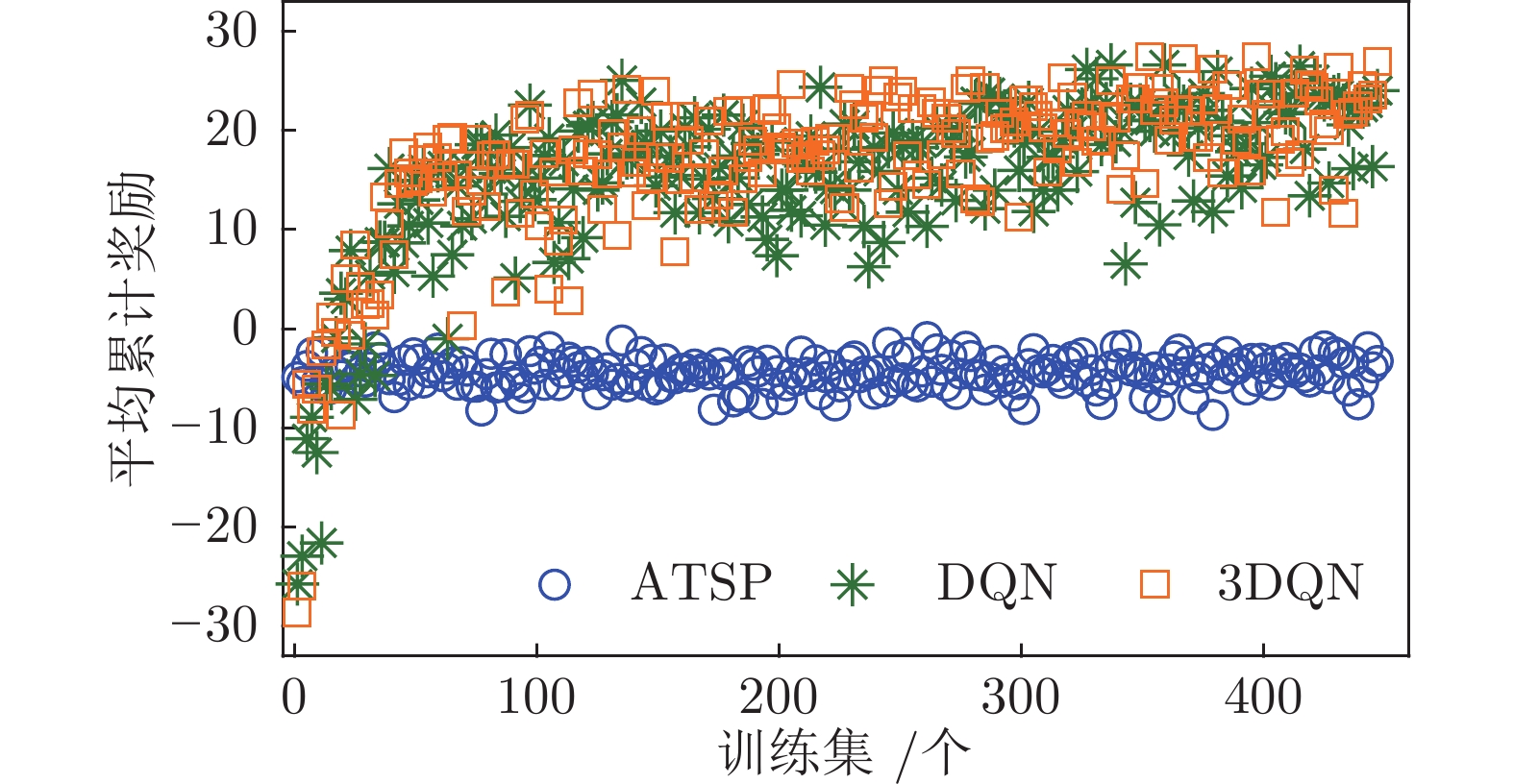
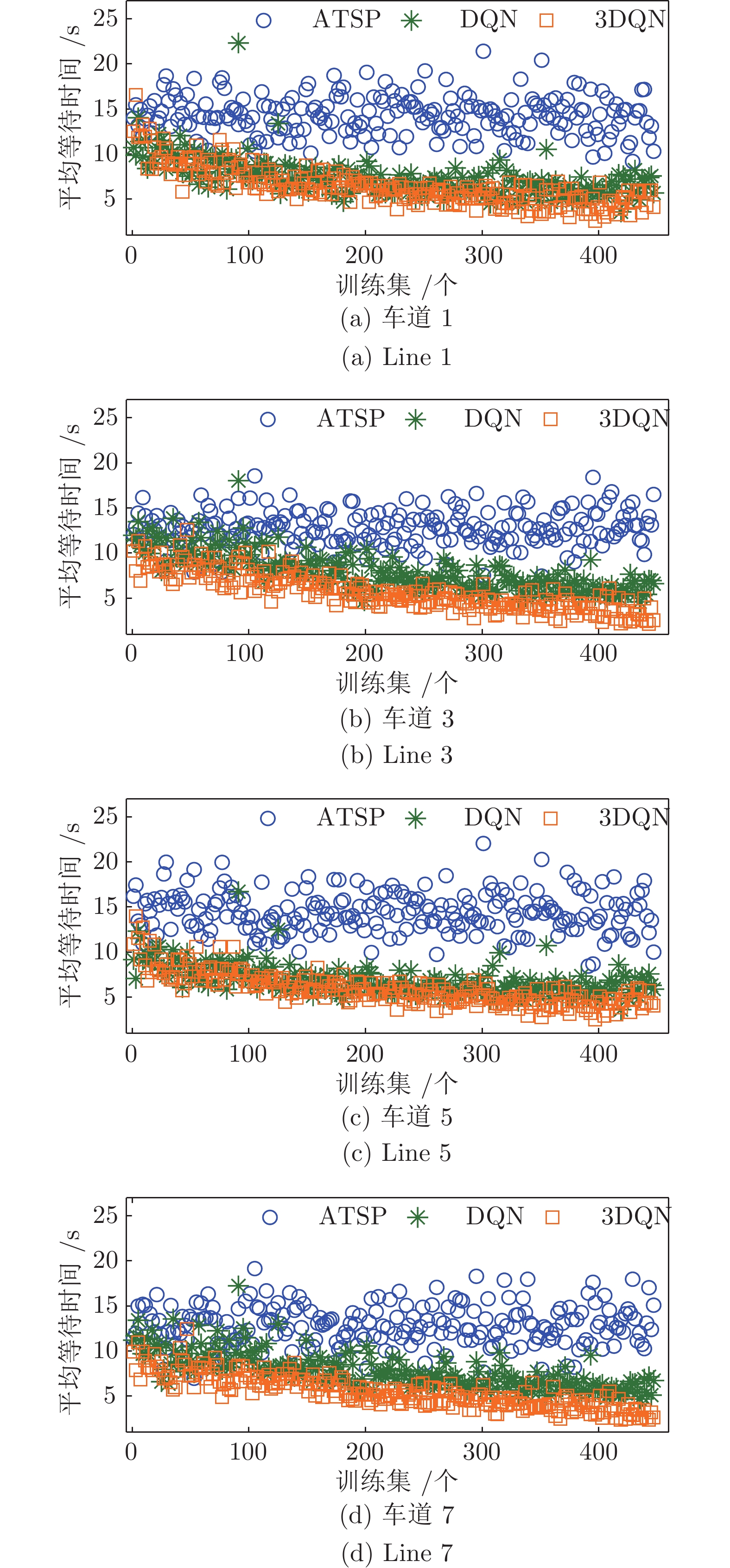
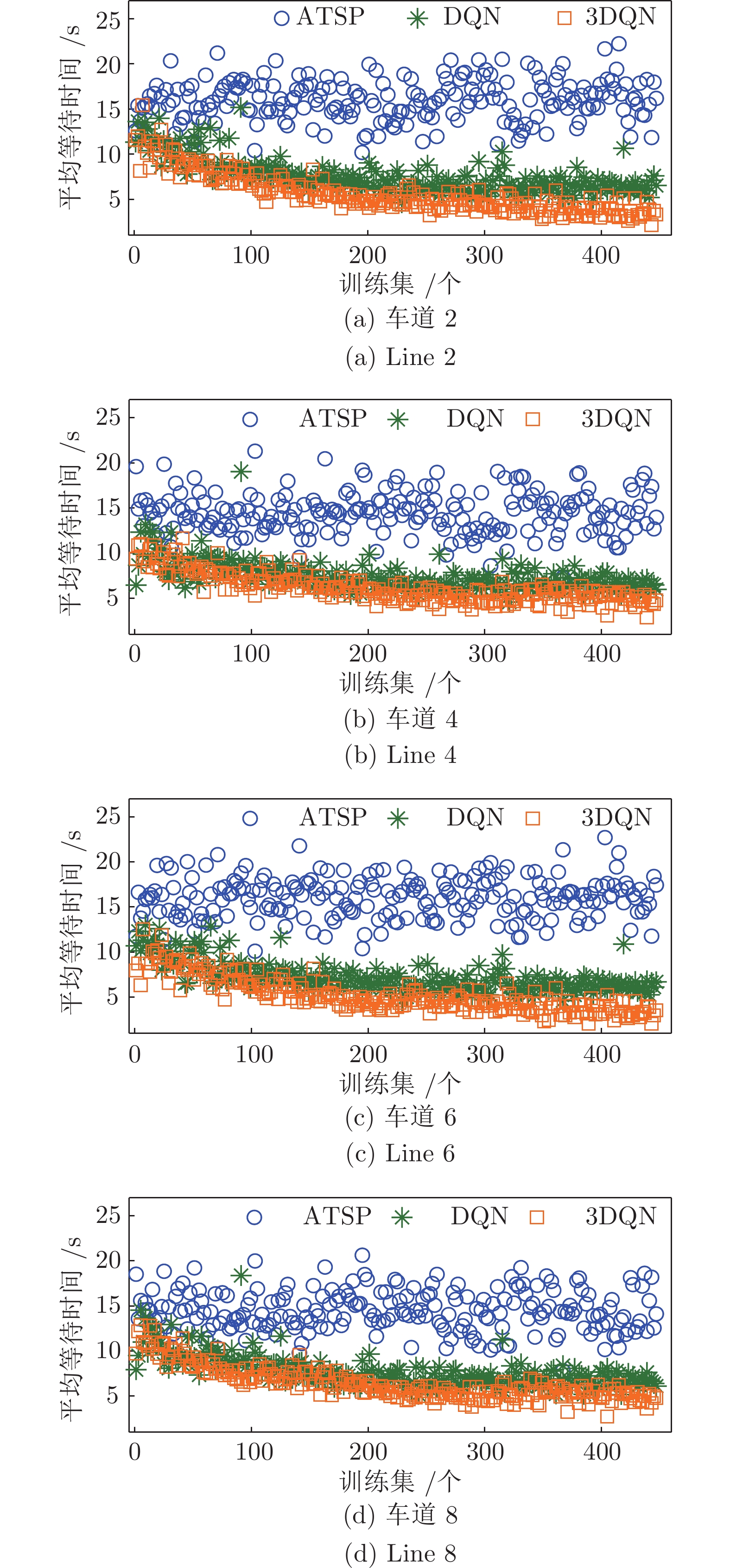
现有的有轨电车信号优先控制系统存在诸多问题, 如无法适应实时交通变化、优化求解较为复杂等. 本文提出了一种基于深度强化学习的有轨电车信号优先控制策略. 不依赖于交叉口复杂交通建模, 采用实时交通信息作为输入, 在有轨电车整个通行过程中连续动态调整交通信号. 协同考虑有轨电车与社会车辆的通行需求, 在尽量保证有轨电车无需停车的同时, 降低社会车辆的通行延误. 采用深度Q网络算法进行问题求解, 并利用竞争架构、双Q网络和加权样本池改善学习性能. 基于SUMO的实验表明, 该模型能够有效地协同提高有轨电车与社会车辆的通行效率.
现有的有轨电车信号优先控制系统存在诸多问题, 如无法适应实时交通变化、优化求解较为复杂等. 本文提出了一种基于深度强化学习的有轨电车信号优先控制策略. 不依赖于交叉口复杂交通建模, 采用实时交通信息作为输入, 在有轨电车整个通行过程中连续动态调整交通信号. 协同考虑有轨电车与社会车辆的通行需求, 在尽量保证有轨电车无需停车的同时, 降低社会车辆的通行延误. 采用深度Q网络算法进行问题求解, 并利用竞争架构、双Q网络和加权样本池改善学习性能. 基于SUMO的实验表明, 该模型能够有效地协同提高有轨电车与社会车辆的通行效率.




2019, 45(12): 2378-2392.
doi: 10.16383/j.aas.c190044
cstr: 32138.14.j.aas.c190044
摘要:
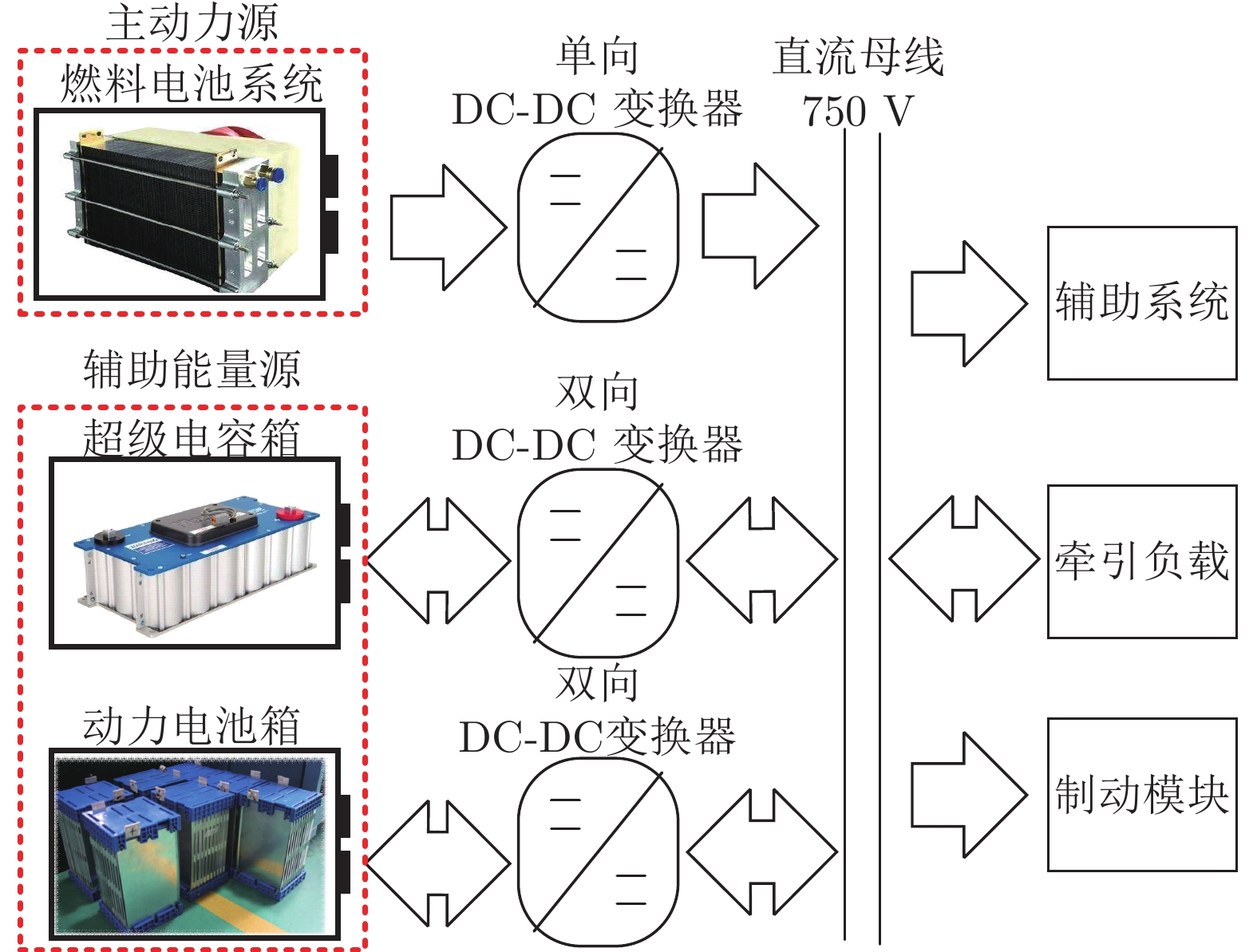
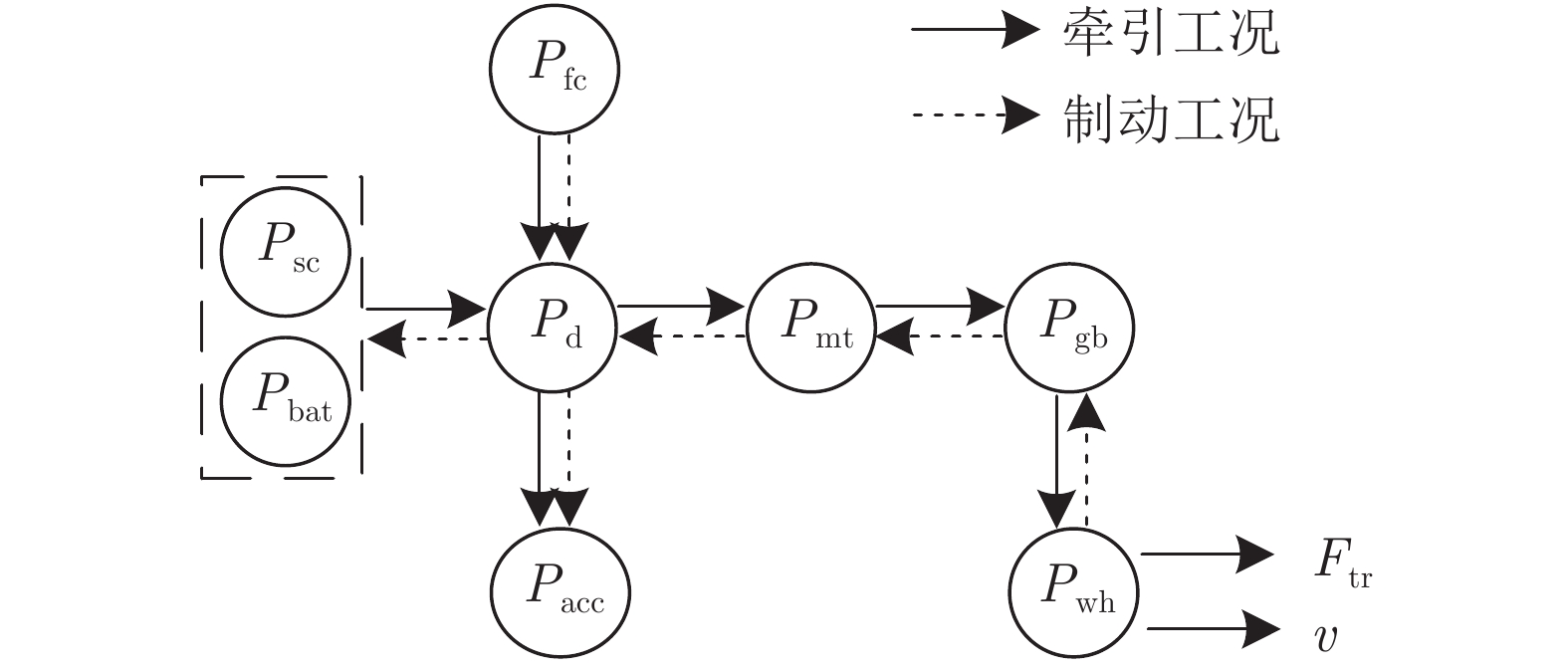
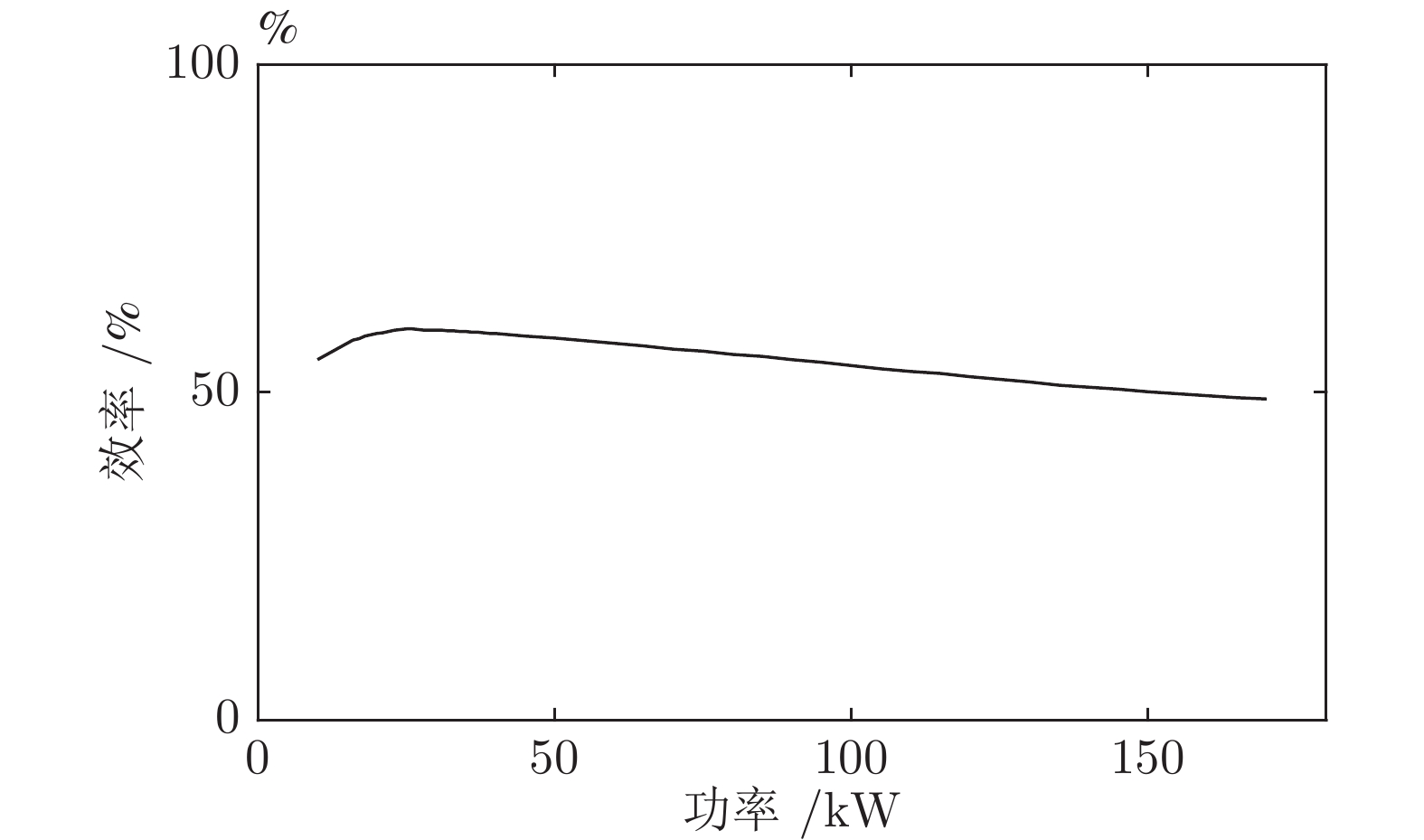
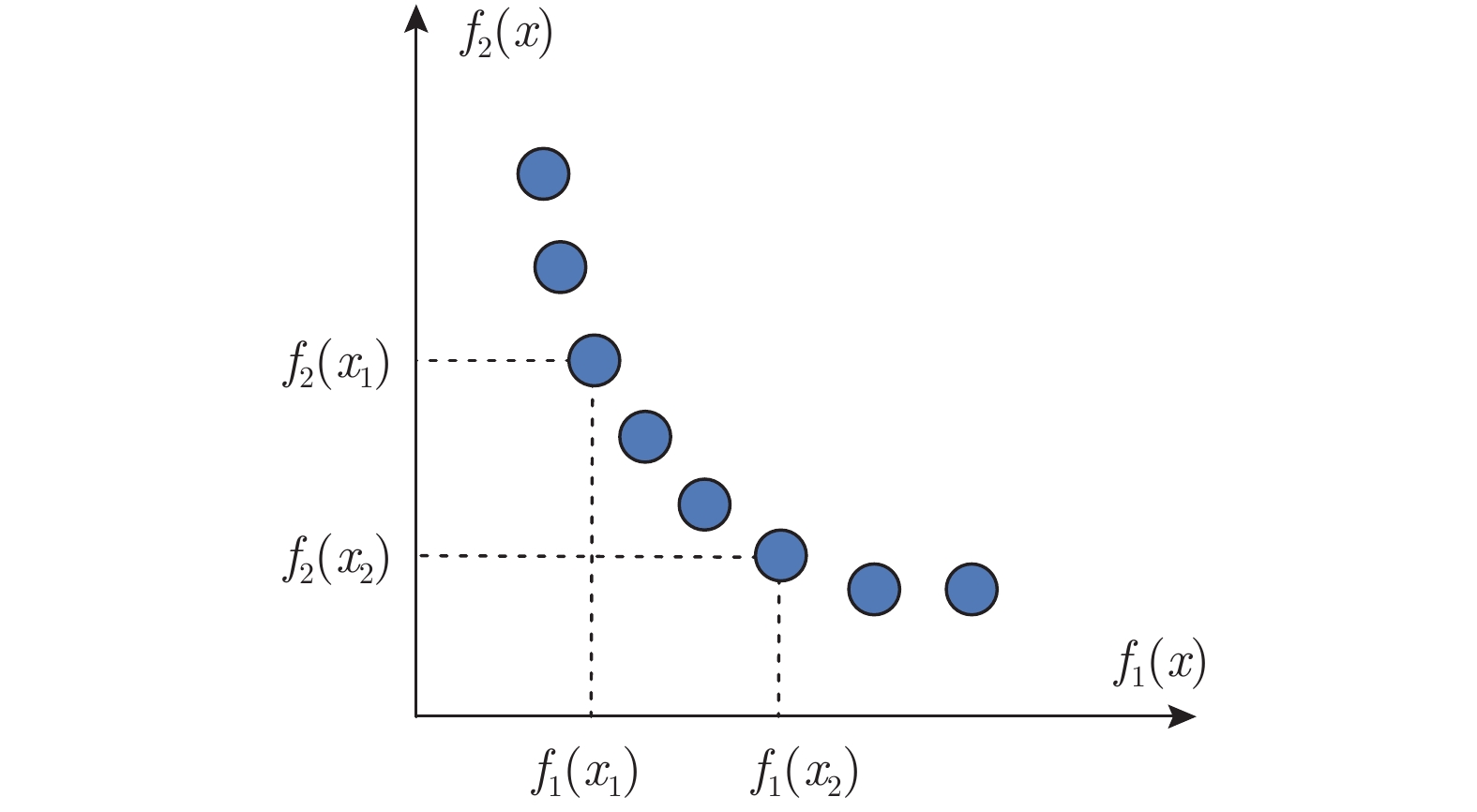
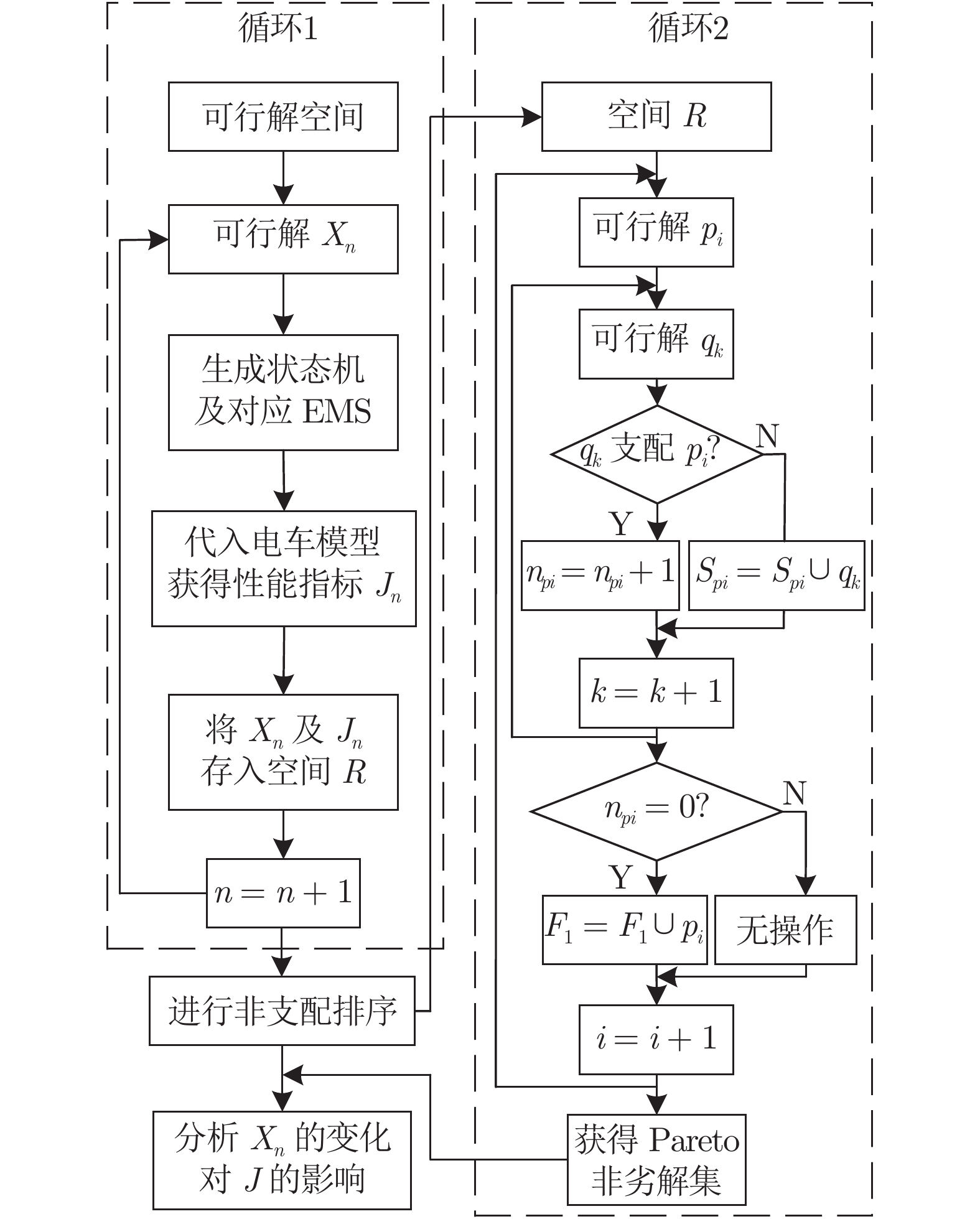
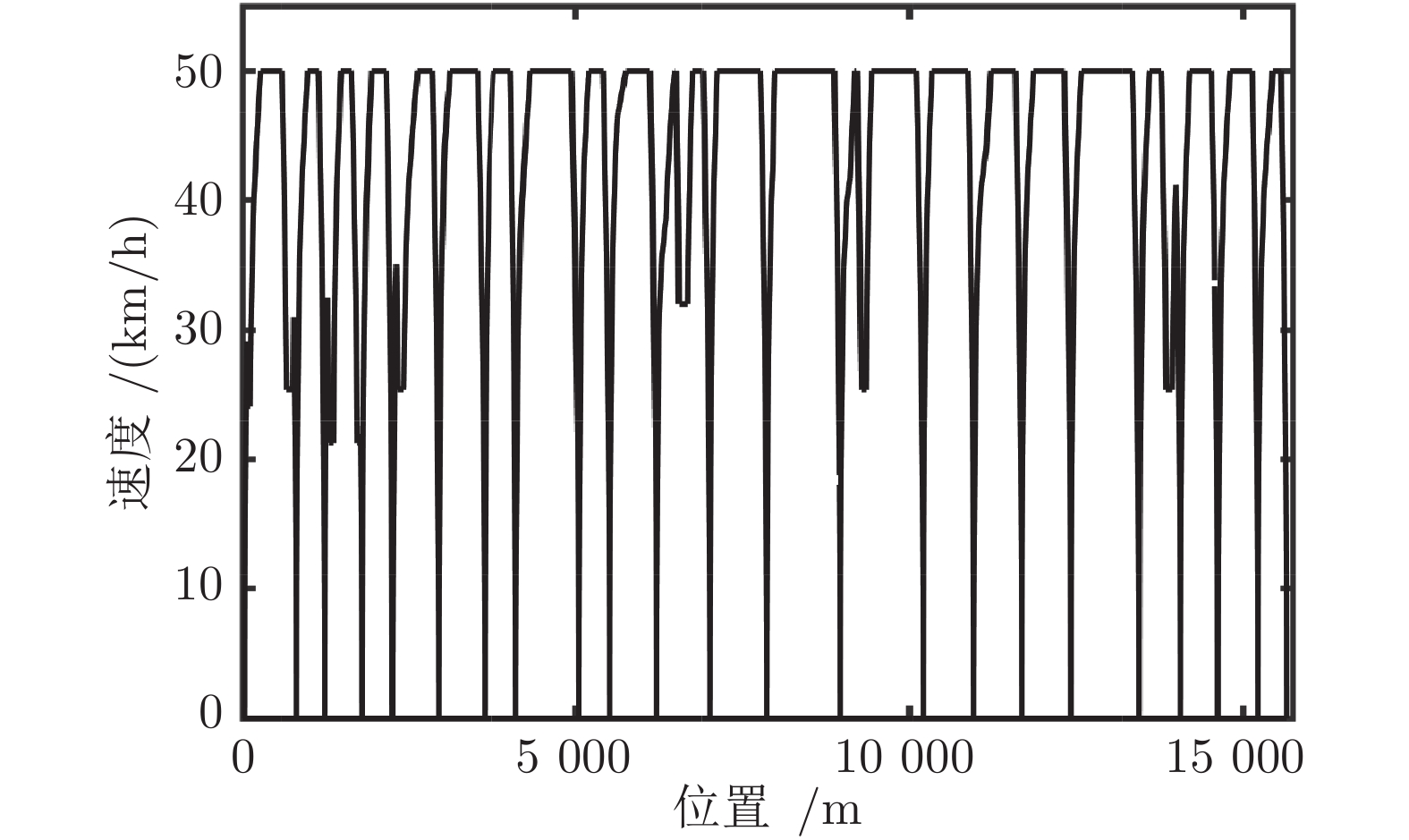
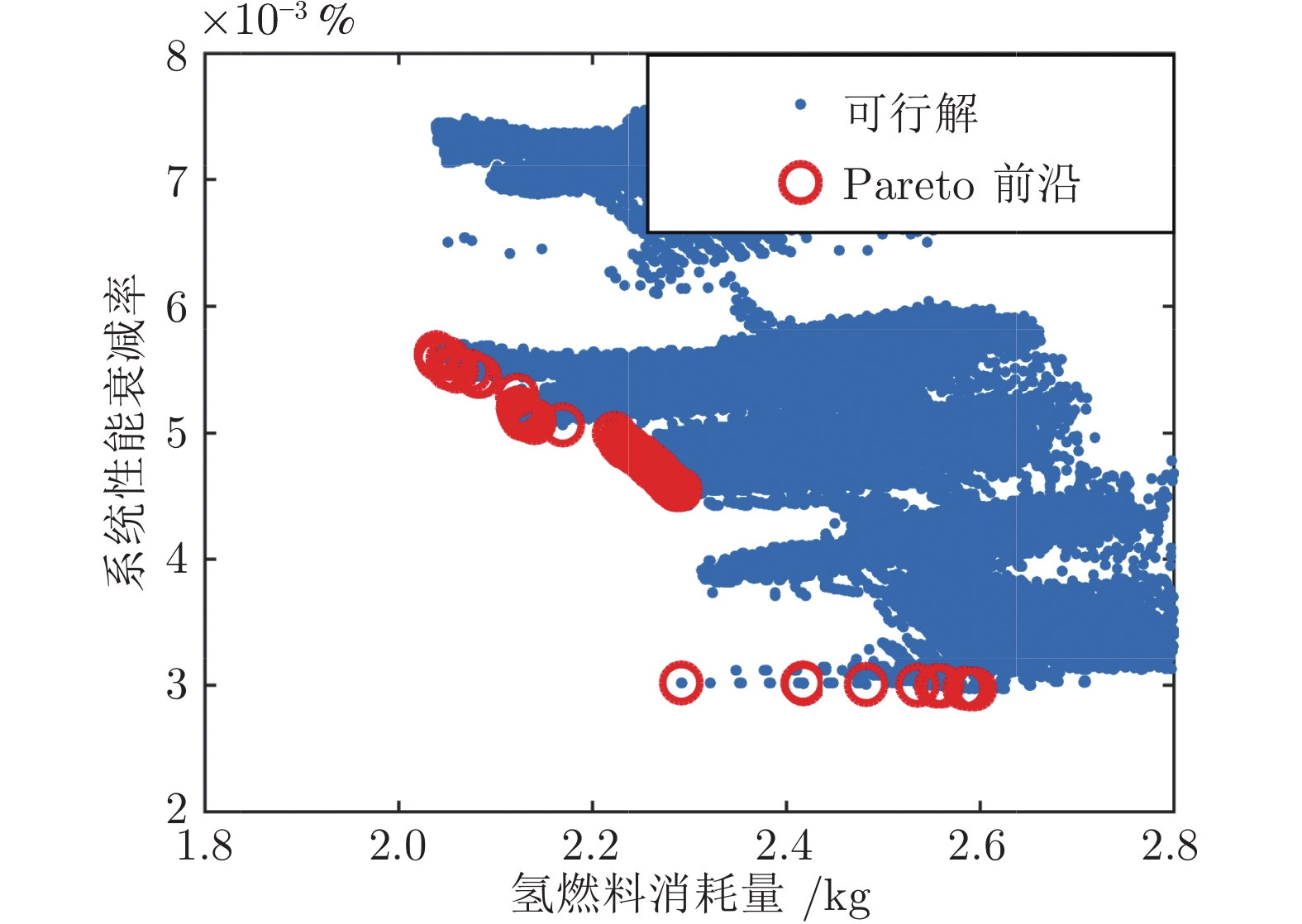
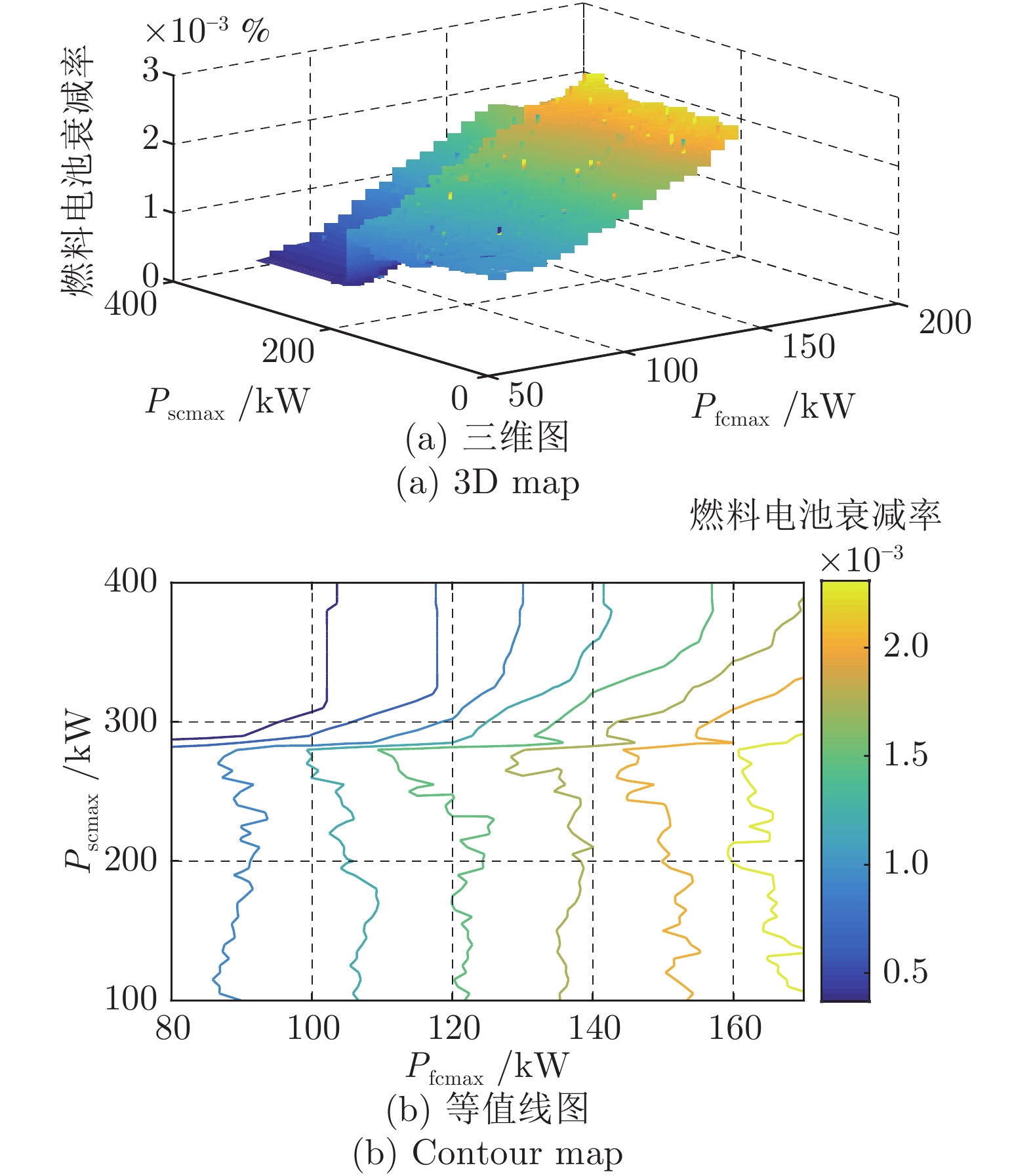
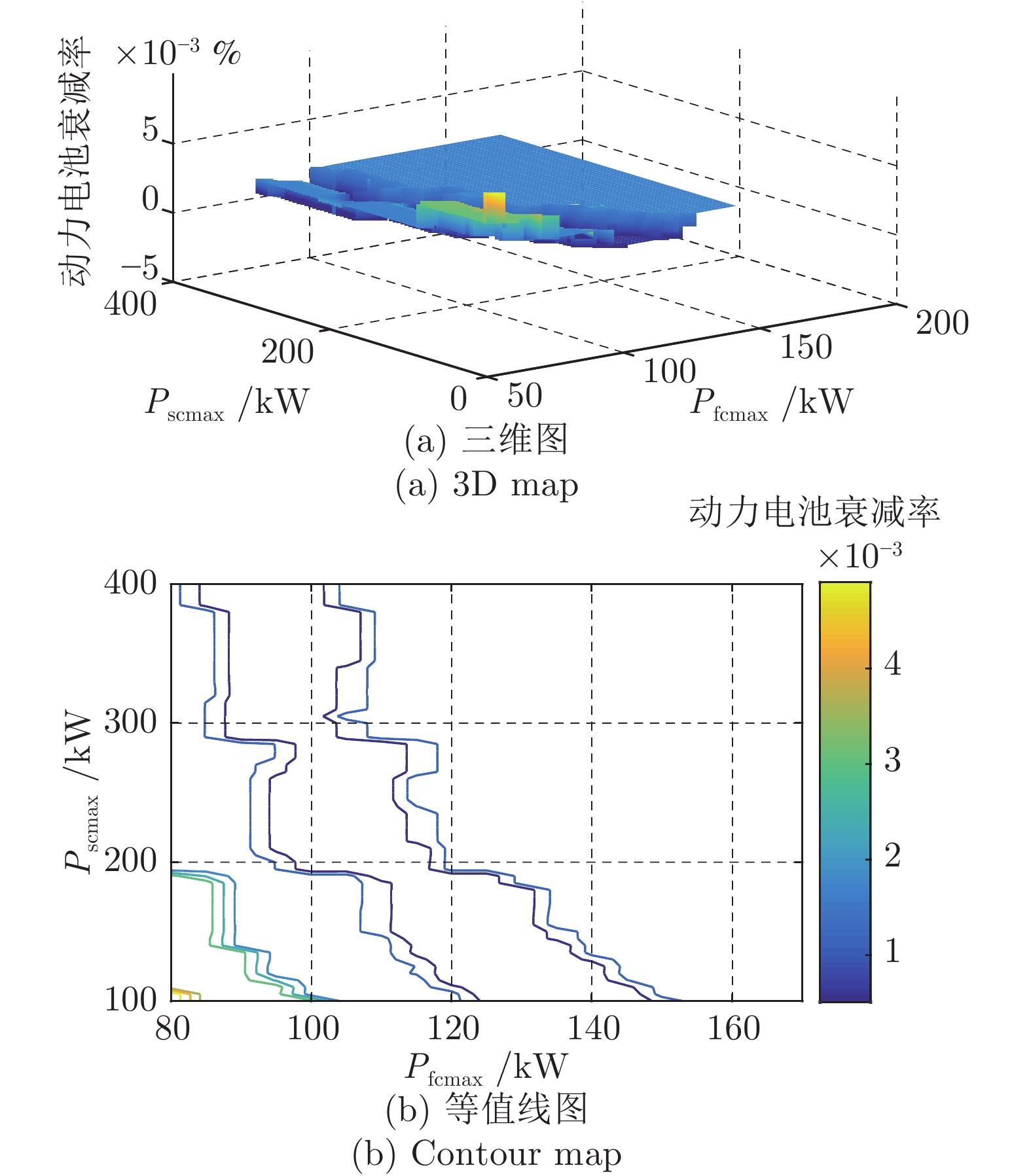
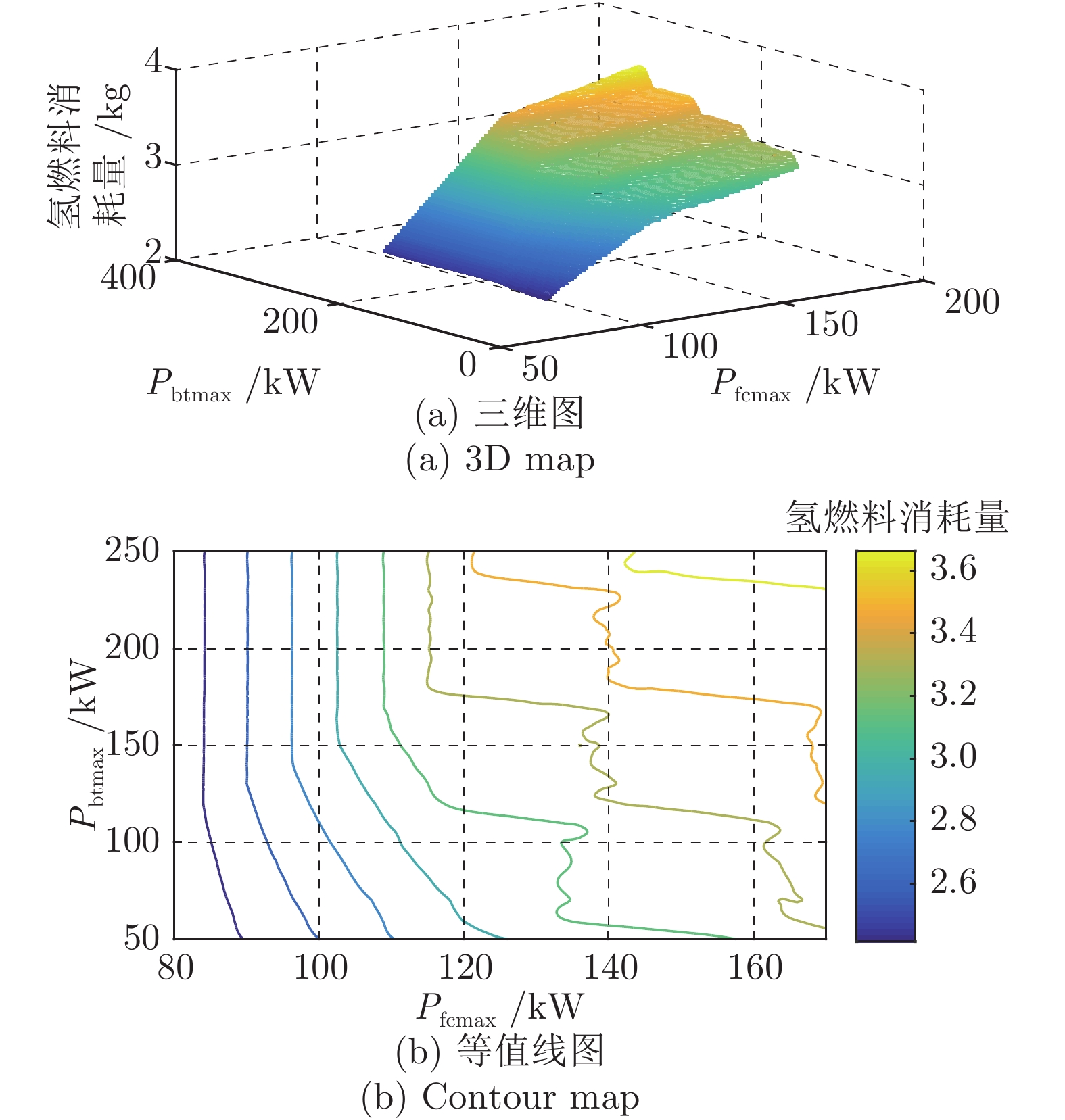
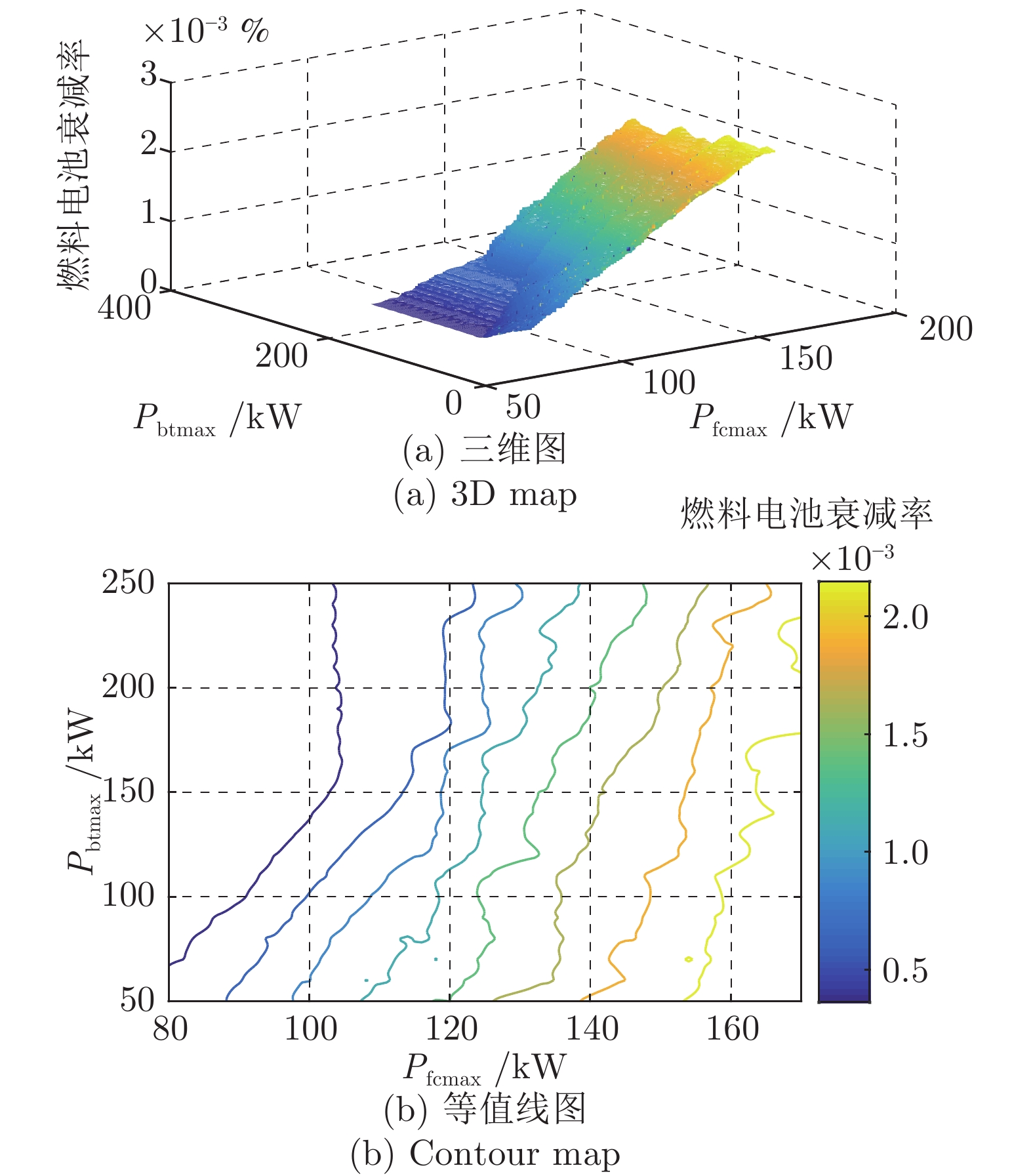
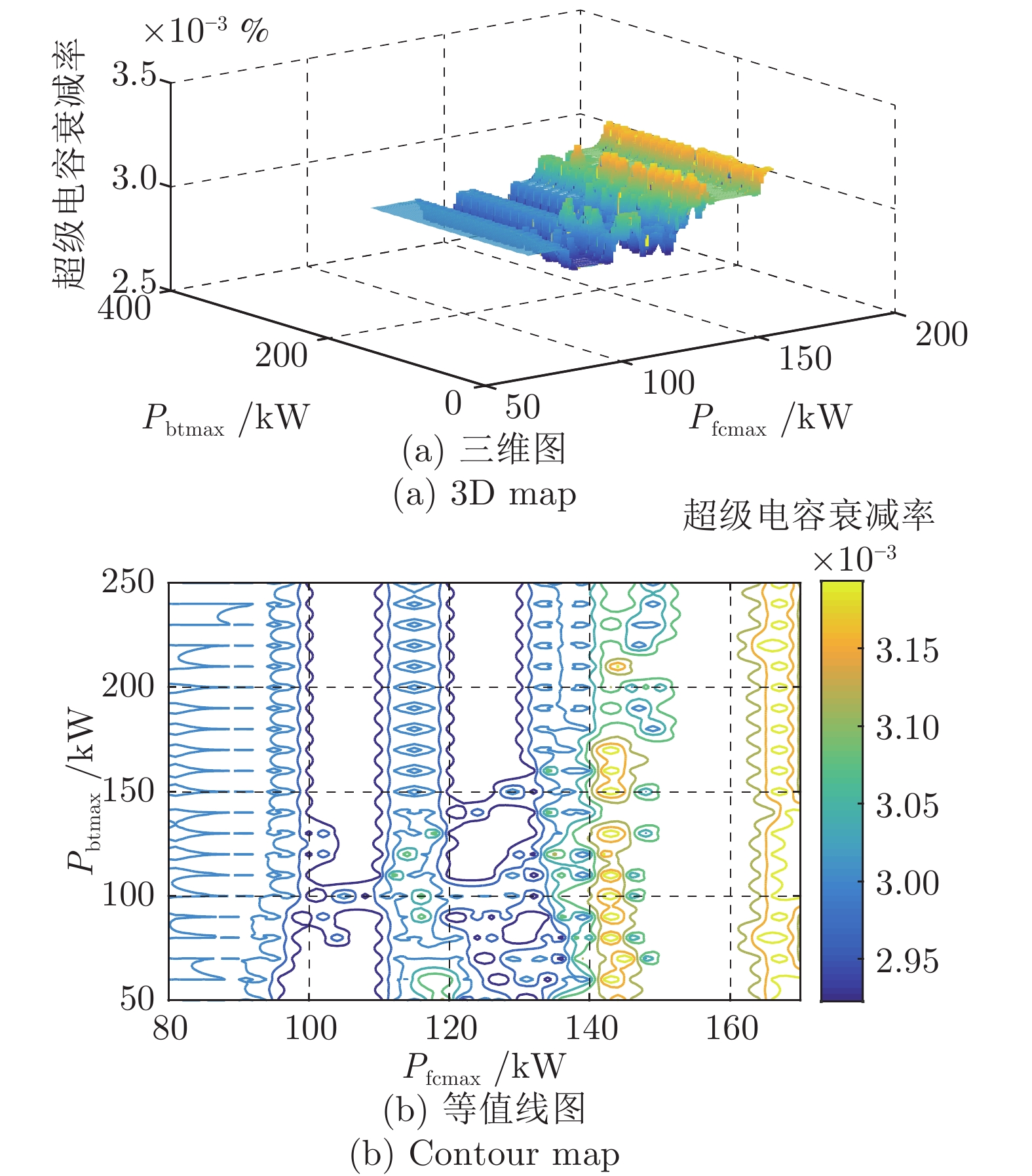
节能环保的出行方式得到政府的大力推广, 其中燃料电池混合动力有轨电车由于可无网运行且节能环保而备受关注.为了改善燃料电池/超级电容/动力电池大功率有轨电车的燃料经济性与系统耐久性, 提出一种有轨电车能量管理策略(Energy management strategy, EMS)的多目标优化方法. 首先以氢燃料消耗量和能量源性能衰减率作为评价指标, 建立多目标成本函数. 由于两个指标很难在同一个等式中评价, 设计了基于状态机与非支配排序的能量管理Pareto多目标优化方法, 获得了有轨电车能量管理策略Pareto非劣解集, 并分析了能量管理策略的目标功率参数对性能指标的影响规律, 进而遴选出兼顾燃料经济性与系统耐久性的综合最优解. 结果表明, 与功率跟随策略和基于遗传算法优化策略相比, 该能量管理优化方法的燃料经济性分别提高了29.4 %和2.4 %.
节能环保的出行方式得到政府的大力推广, 其中燃料电池混合动力有轨电车由于可无网运行且节能环保而备受关注.为了改善燃料电池/超级电容/动力电池大功率有轨电车的燃料经济性与系统耐久性, 提出一种有轨电车能量管理策略(Energy management strategy, EMS)的多目标优化方法. 首先以氢燃料消耗量和能量源性能衰减率作为评价指标, 建立多目标成本函数. 由于两个指标很难在同一个等式中评价, 设计了基于状态机与非支配排序的能量管理Pareto多目标优化方法, 获得了有轨电车能量管理策略Pareto非劣解集, 并分析了能量管理策略的目标功率参数对性能指标的影响规律, 进而遴选出兼顾燃料经济性与系统耐久性的综合最优解. 结果表明, 与功率跟随策略和基于遗传算法优化策略相比, 该能量管理优化方法的燃料经济性分别提高了29.4 %和2.4 %.