

Analysis and Adaptive Control of the Track Induced Self-excited Vibration for the Maglev Transport
-
摘要: 本文针对中低速磁浮交通的轨排自激振动问题, 首先建立了包括轨枕、导轨在内的多跨磁浮轨排动力学模型, 通过理论方法分析轨排的模态振型、频率等关键参数. 其次, 建立了包含一体化电磁铁的悬浮模块的动力学模型, 并与轨排模型结合建立轨排 − 悬浮模块耦合模型, 分析了耦合系统失稳发生自激振动的原因. 提出了一种带辨识器的自适应振动控制方法, 能够实时辨识轨排的主要动力学参数, 并由此产生自适应振动控制律.相比现有的轨排振动控制方法, 该方法具有更好的稳定性和环境适应性.Abstract: Taking the track-induced self-excited vibration problem in the medium-low speed maglev transport as the object, the model of the multi-span track structure, which consists of sleepers and rails, is firstly established, and crucial parameters related to the mode shapes and mode frequencies are obtained through theoretical analysis. Secondly, the dynamic model of the levitation module which includes an integrated electromagnet is developed, and together with the track model, a track-levitation module coupled system is formed; the reason that leads to the instability of the coupled system is further investigated. Besides, an adaptive vibration control scheme with a state observer is proposed, which is capable of identifying the major dynamic parameters of the track, and producing adaptive vibration control laws accordingly. Compared with the existing vibration control methods, this method behaves better in stability and adaptability.
-
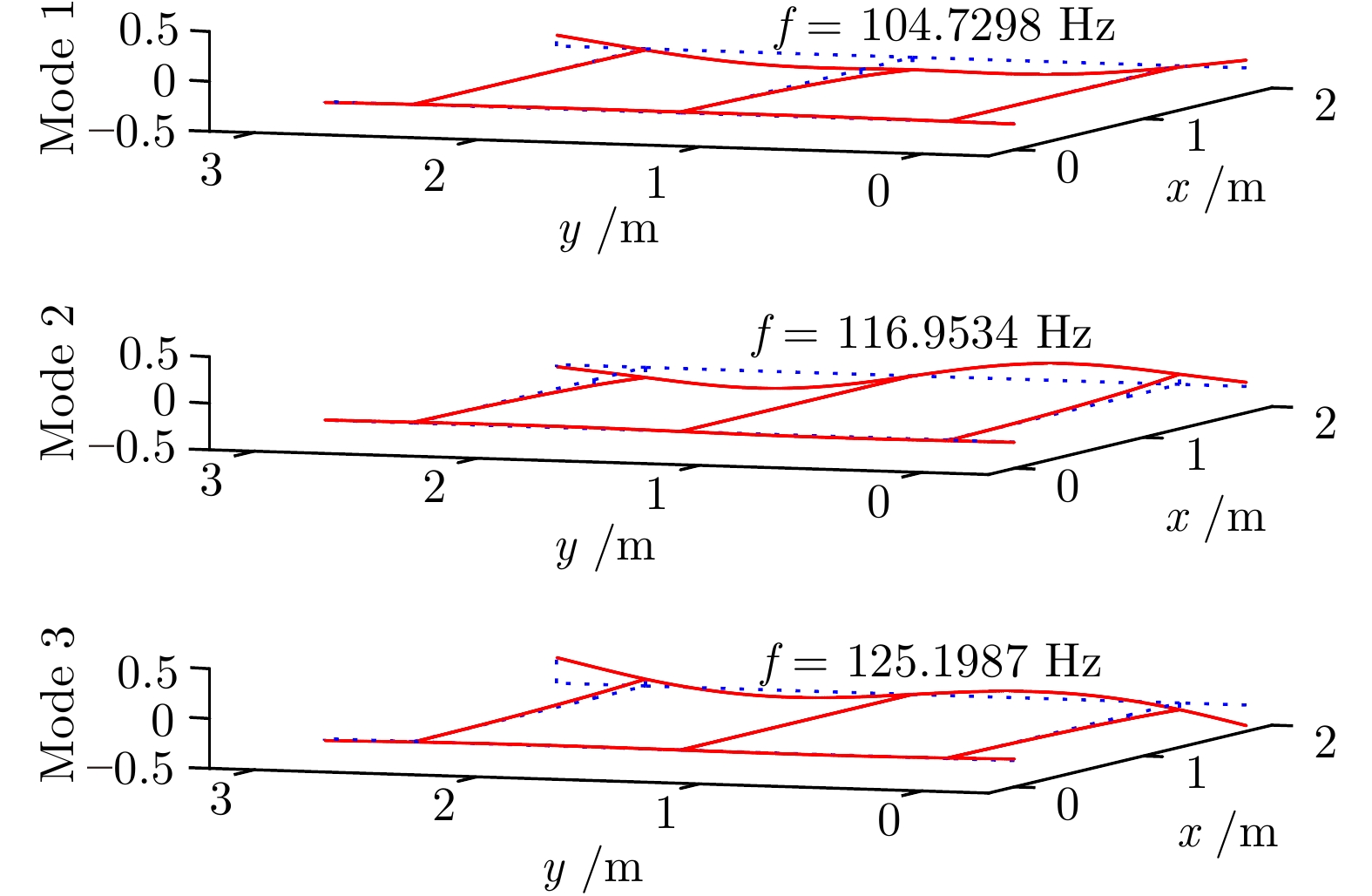
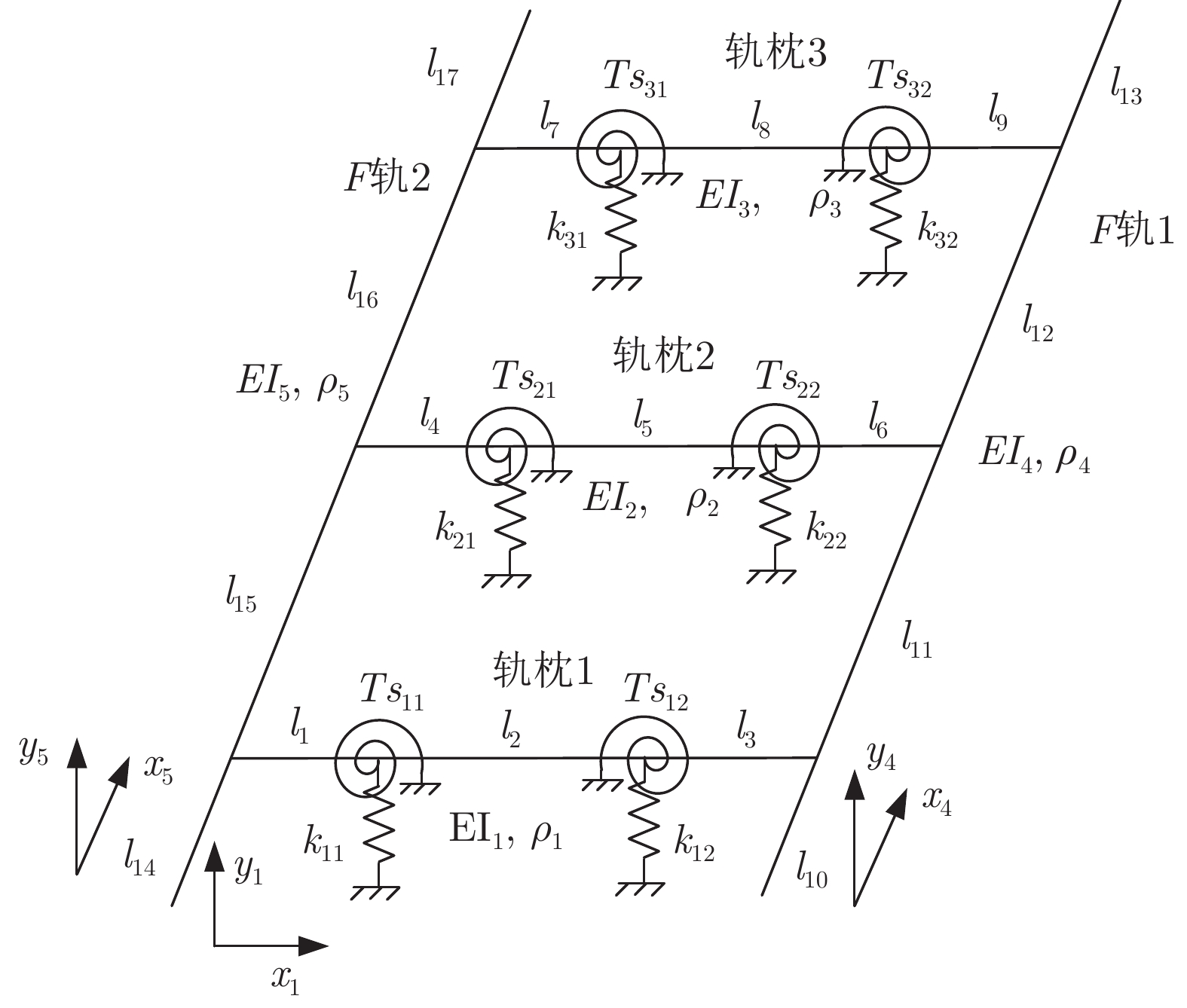
图 3 模态分析法计算得到的轨排前三阶模态振型
Fig. 3 The first three order mode shapes of the track obtained by mode superposition method

图 5 用有限元方法得到的轨排前三阶模态振型
Fig. 5 The first three order mode shapes of the track obtained by finite analysis method
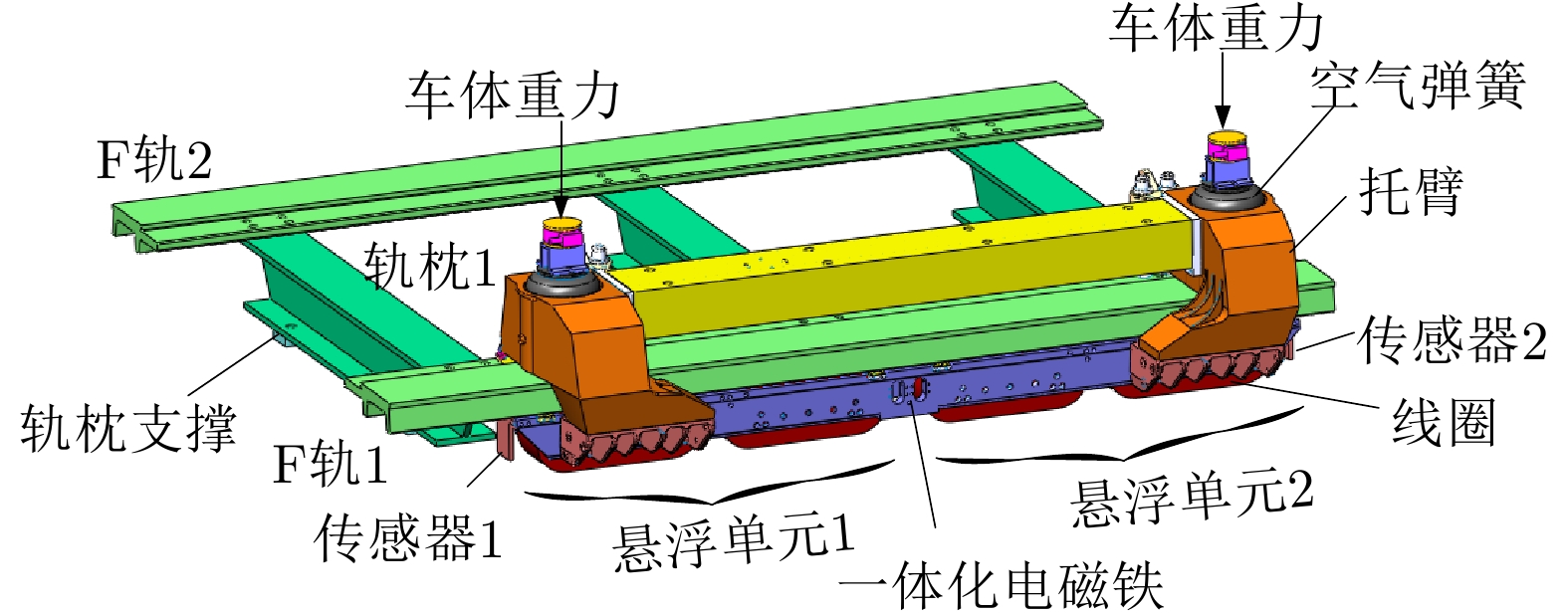
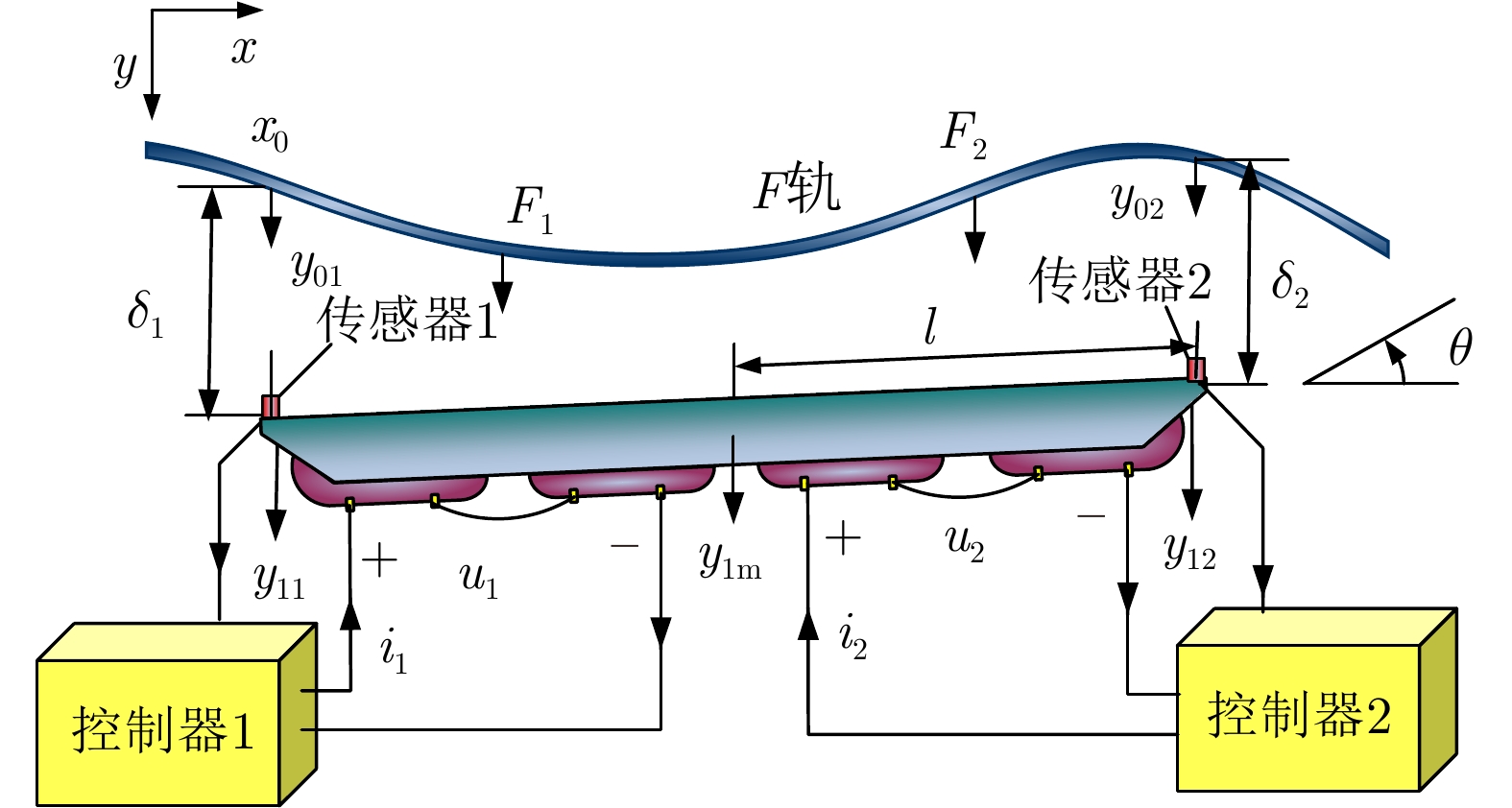
图 6 悬浮模块和轨排相对位置示意图
Fig. 6 Demonstration of the relative position of thelevitation module and the track
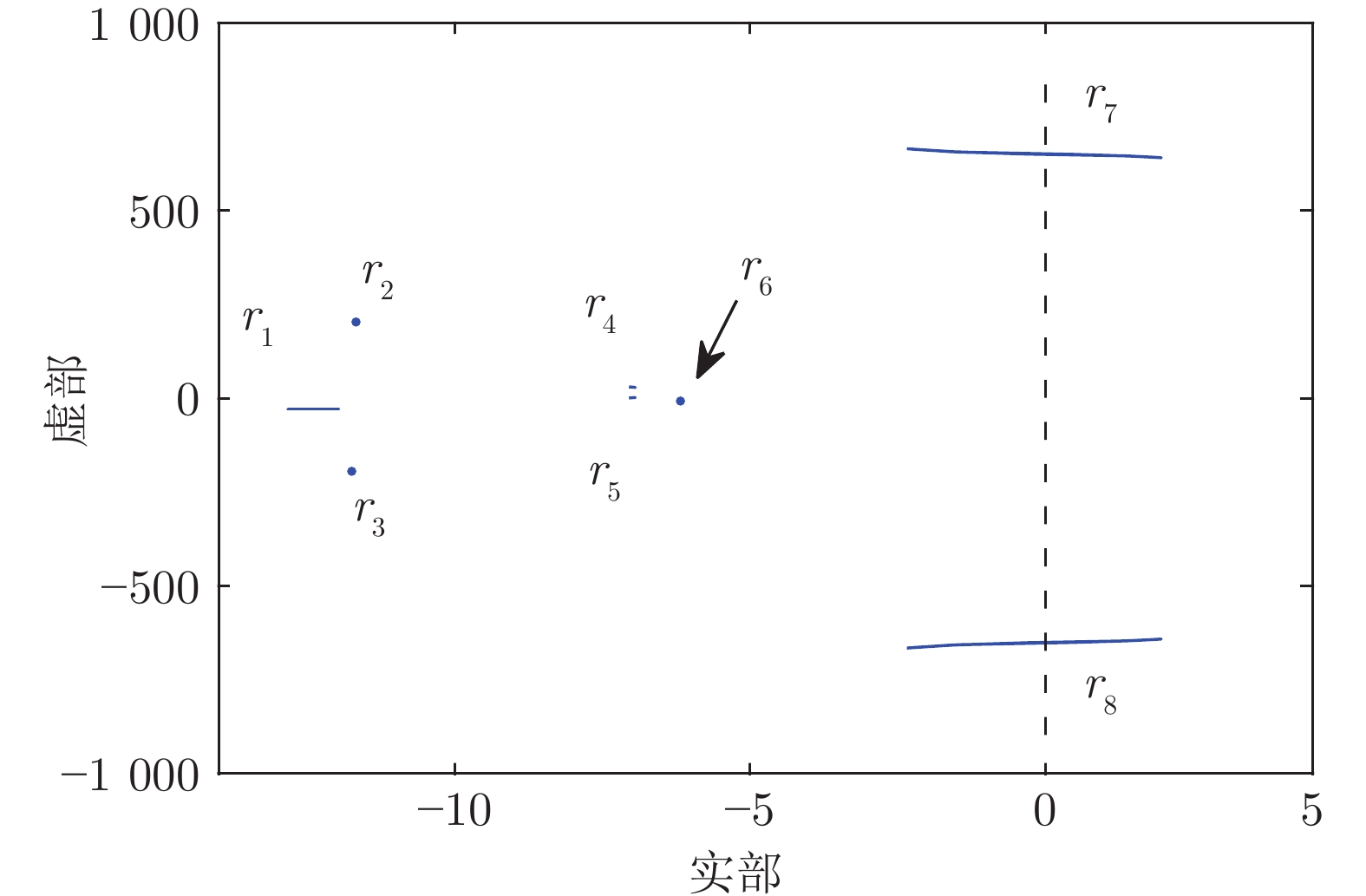
图 8 考虑轨排一阶模态时耦合系统的根随x0变化的轨迹
Fig. 8 Root locus of the coupled system as x0 changes when the track first order mode is taken into account
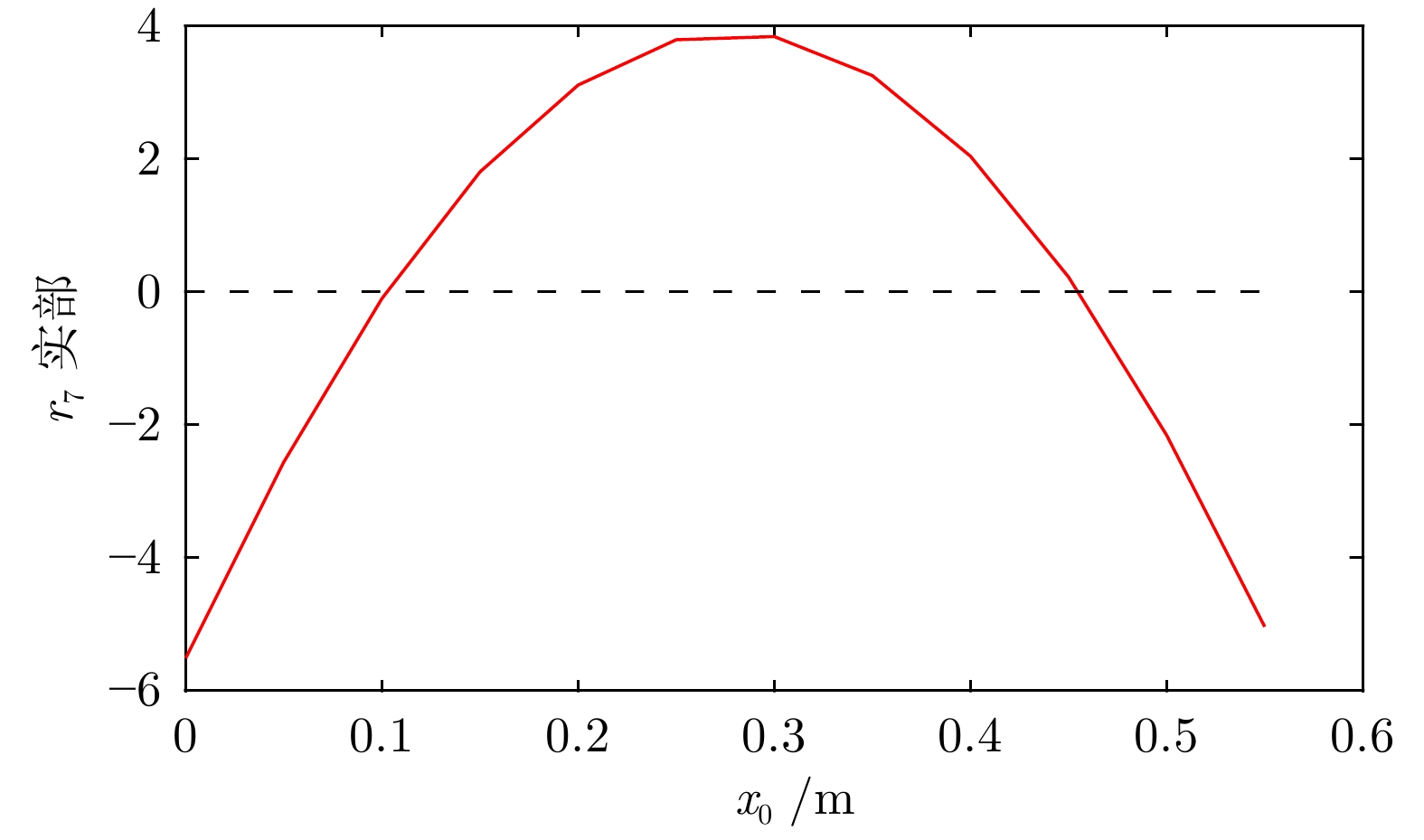
图 9 考虑一阶模态时
$r_7$ 和$r_8$ 的实部随$x_0$ 变化的规律Fig. 9 Real parts of
$r_{7 }$ and$r_{8 }$ as$x_{0}$ changes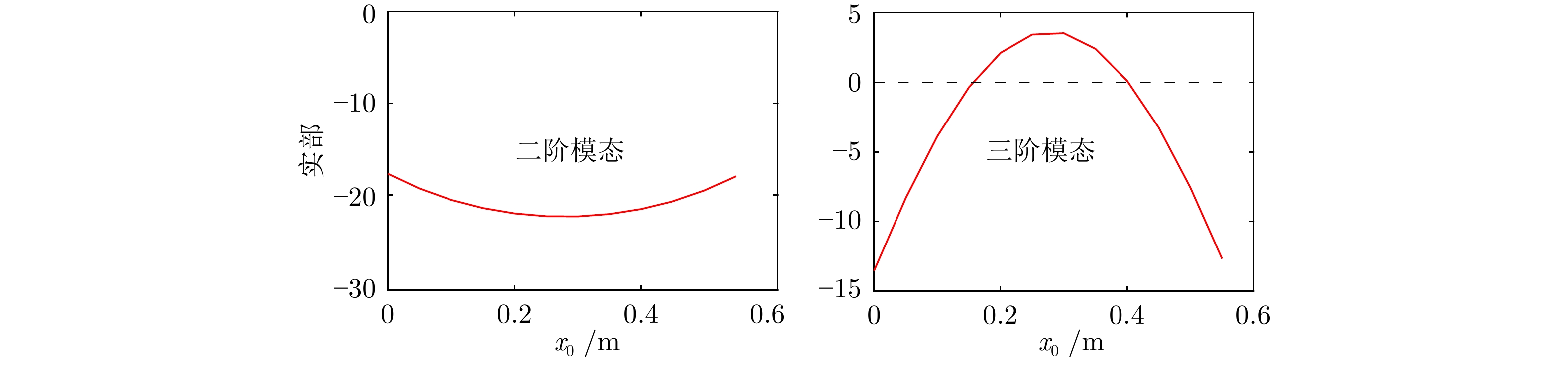
图 10 二阶和三阶模态时
$r_{7}$ 和$r_{8}$ 的实部随$x_{0}$ 变化的规律Fig. 10 Real parts of
$r_{7 }$ and$r_{8 }$ as$x_{0}$ changes when the second and third order modes are taken into account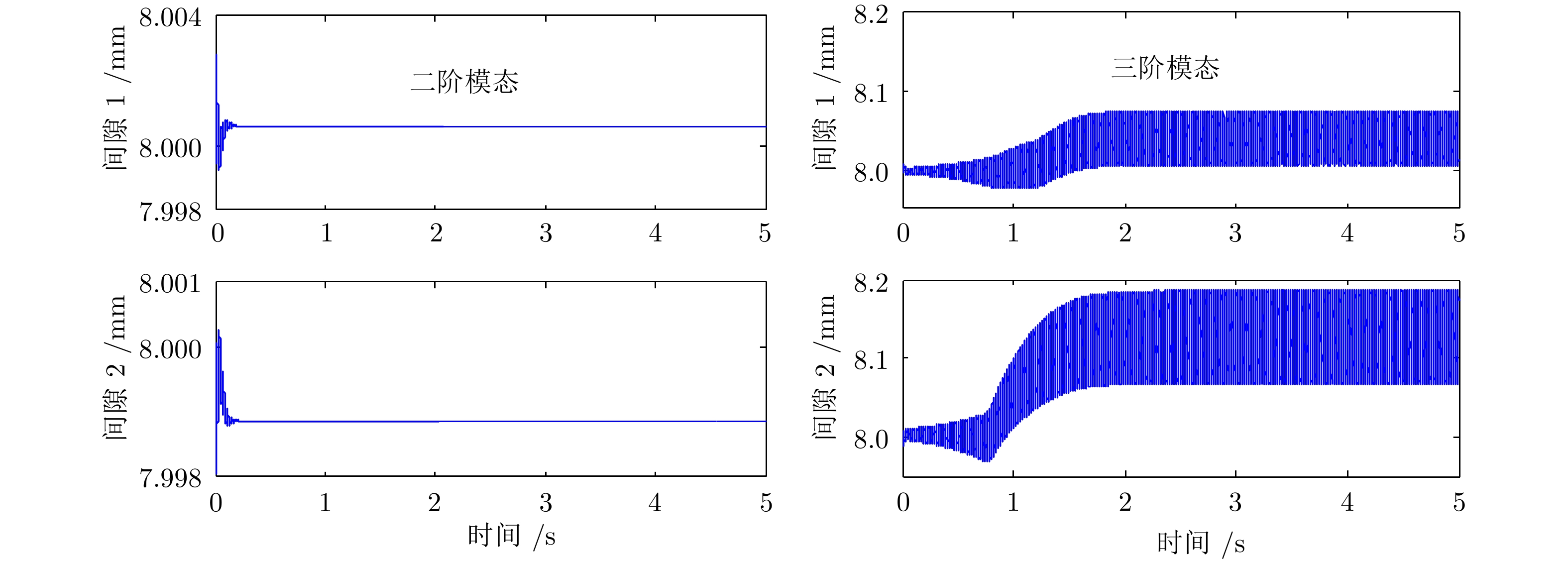
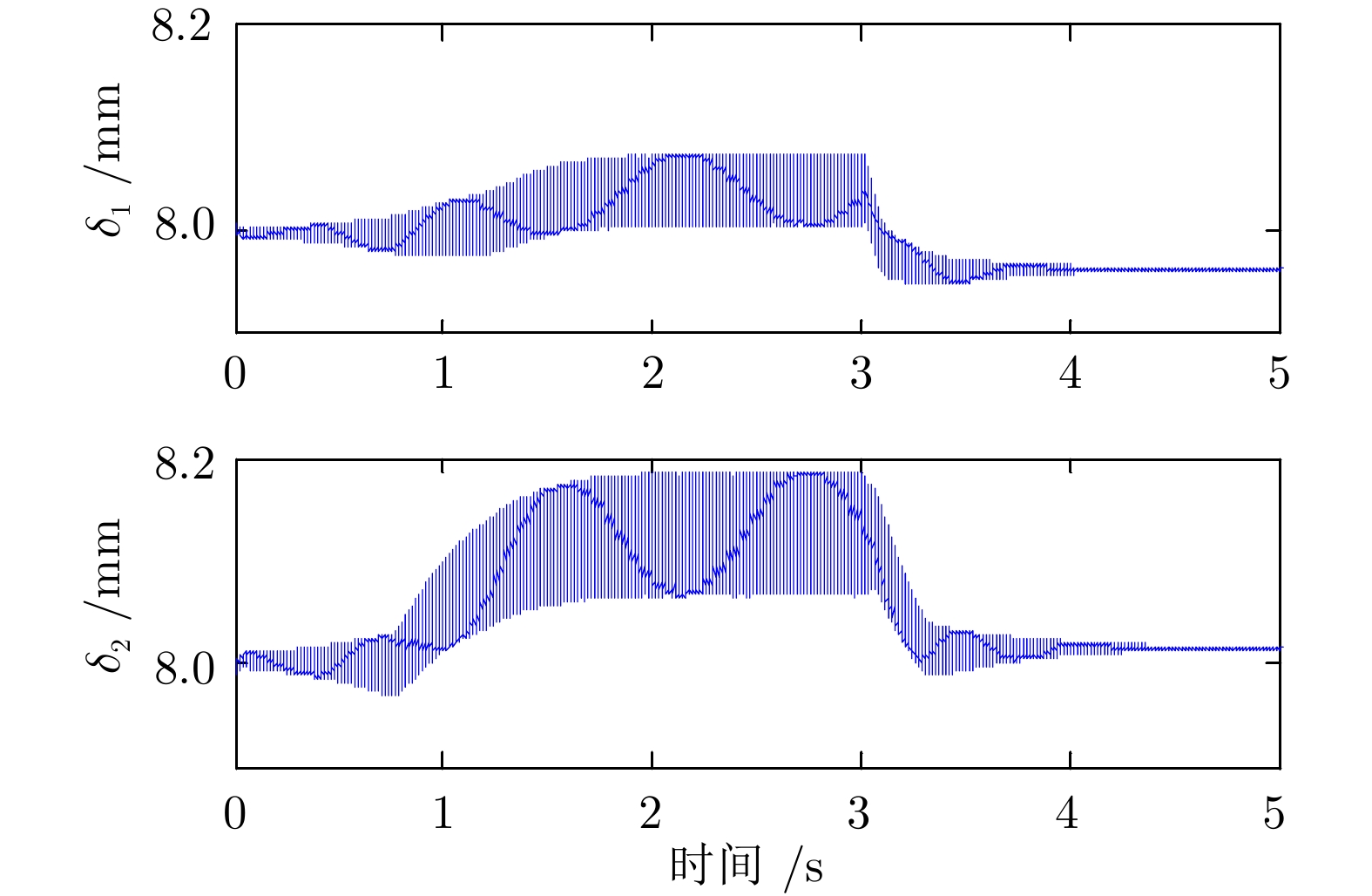
图 11 悬浮模块左右两点悬浮间隙的仿真结果
Fig. 11 Levitation gaps of the levitation module in the simulation
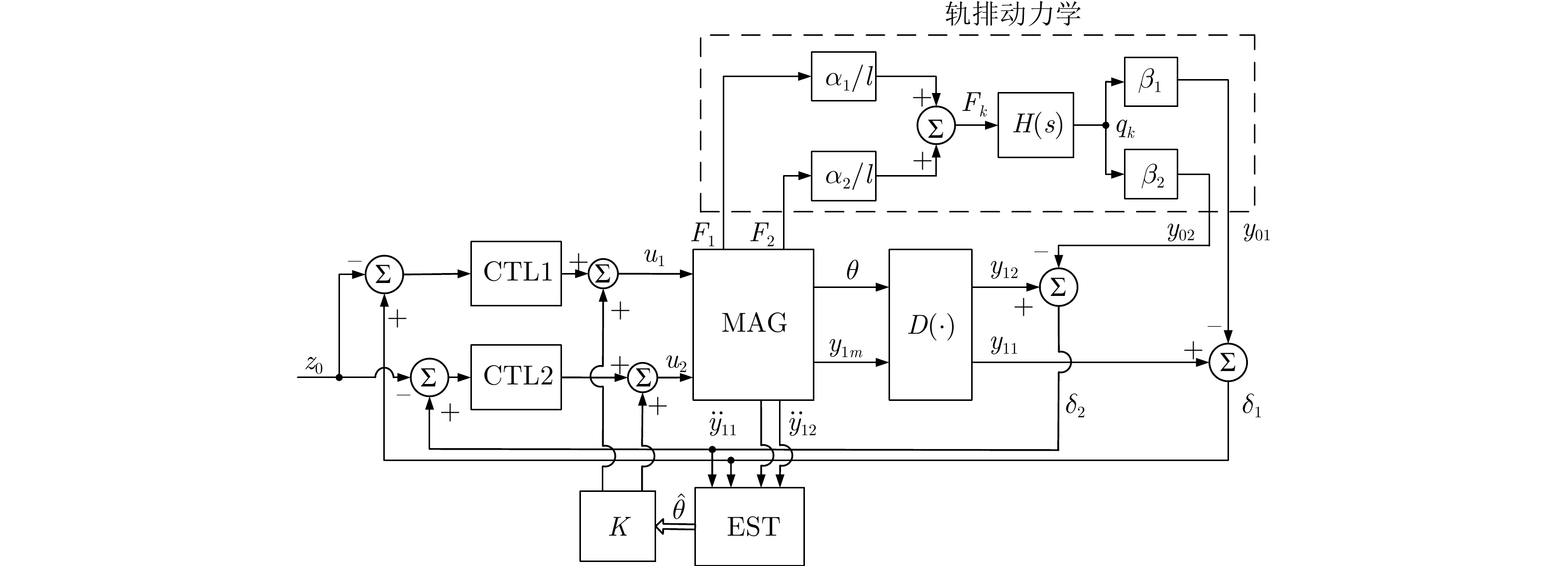
图 12 模块悬浮系统和轨排耦合模型的控制结构框图
Fig. 12 Block diagram of the control system with levitation module and track coupled system
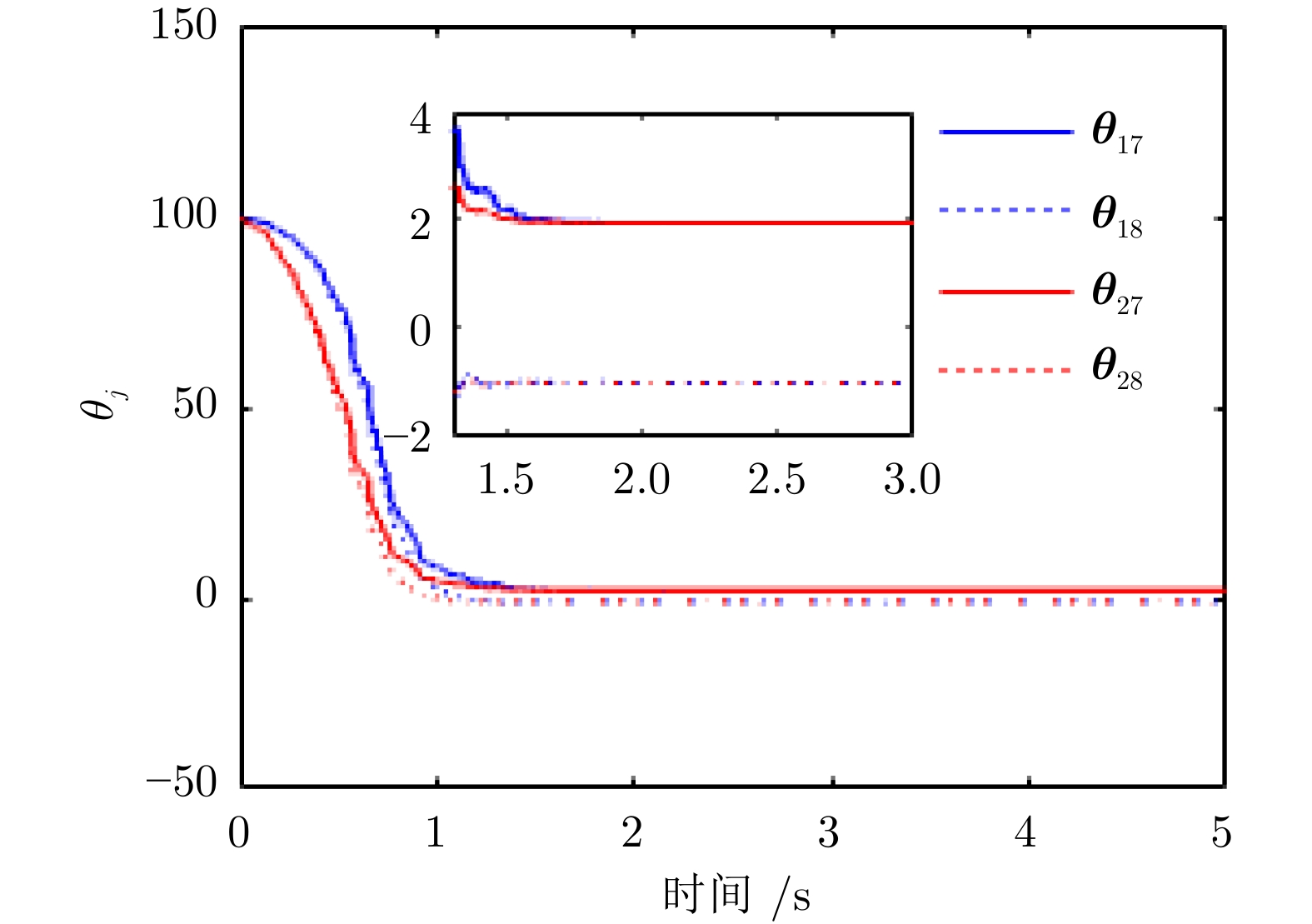
图 13
$\hat {{ \theta} }_1 $ 和$\hat {{ \theta} }_2$ 后2项参数的辨识结果Fig. 13 Identification of the last two terms in
$\hat {{ \theta} }_1 $ and$\hat {{ \theta} }_2$ 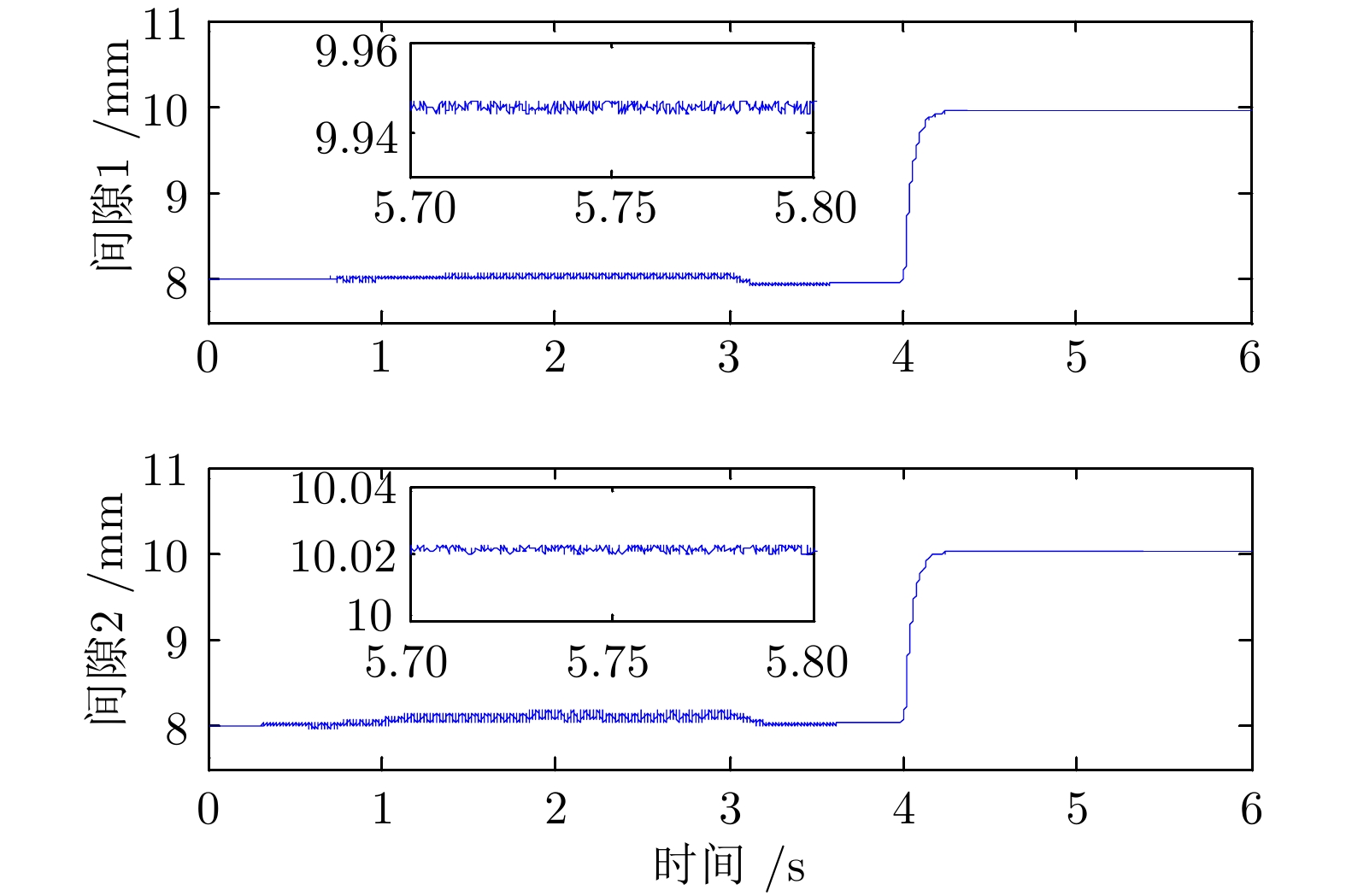
图 16 在阶跃和噪声干扰下闭环系统的仿真结果
Fig. 16 Simulation result of the closed-loop system in the presence of step and noise interferences
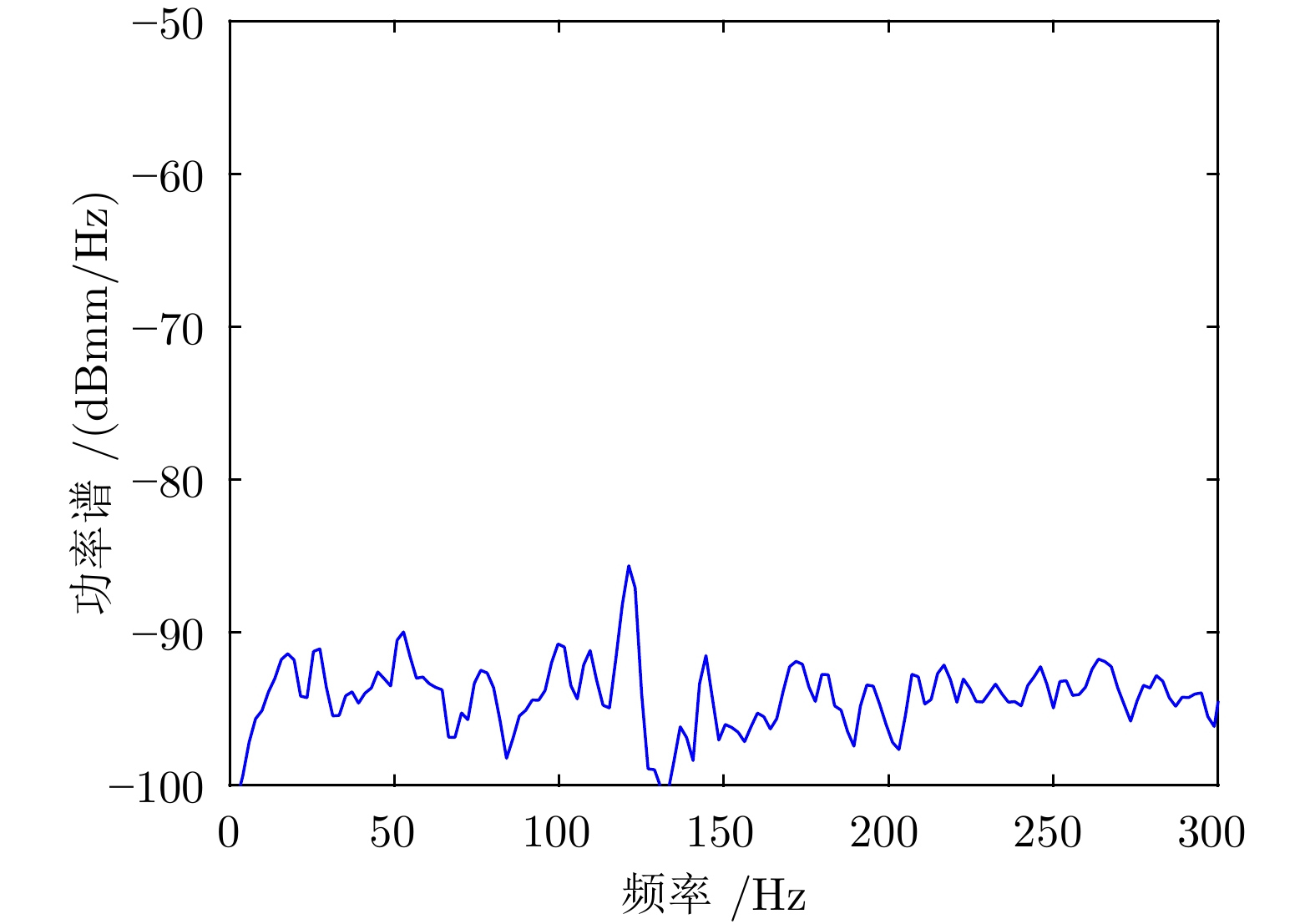
图 17 在4.5
$\sim $ 6 s之间的间隙1信号功率谱密度Fig. 17 Power spectrum density of measured gap 1 signal during 4.5 s to 6 s
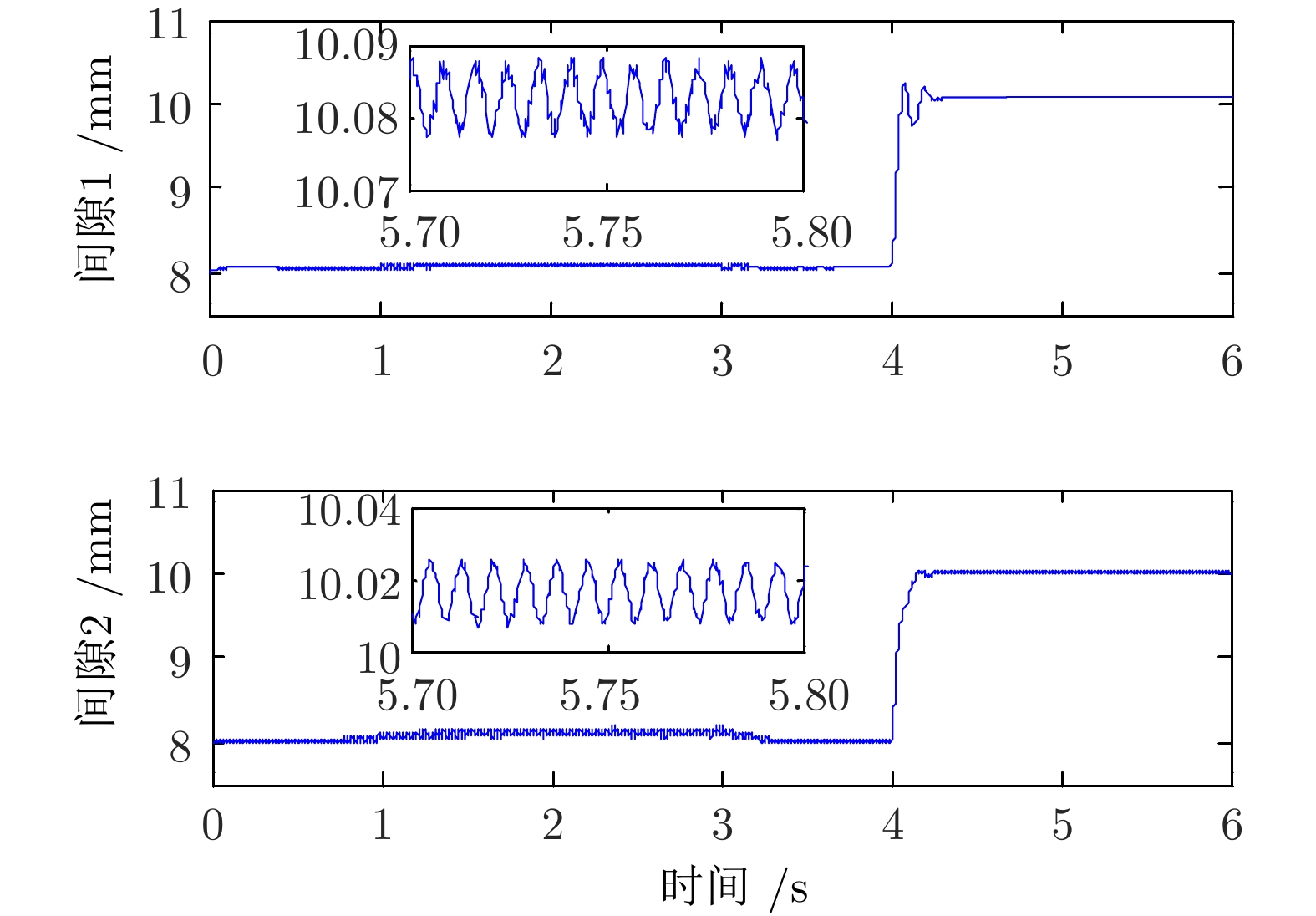
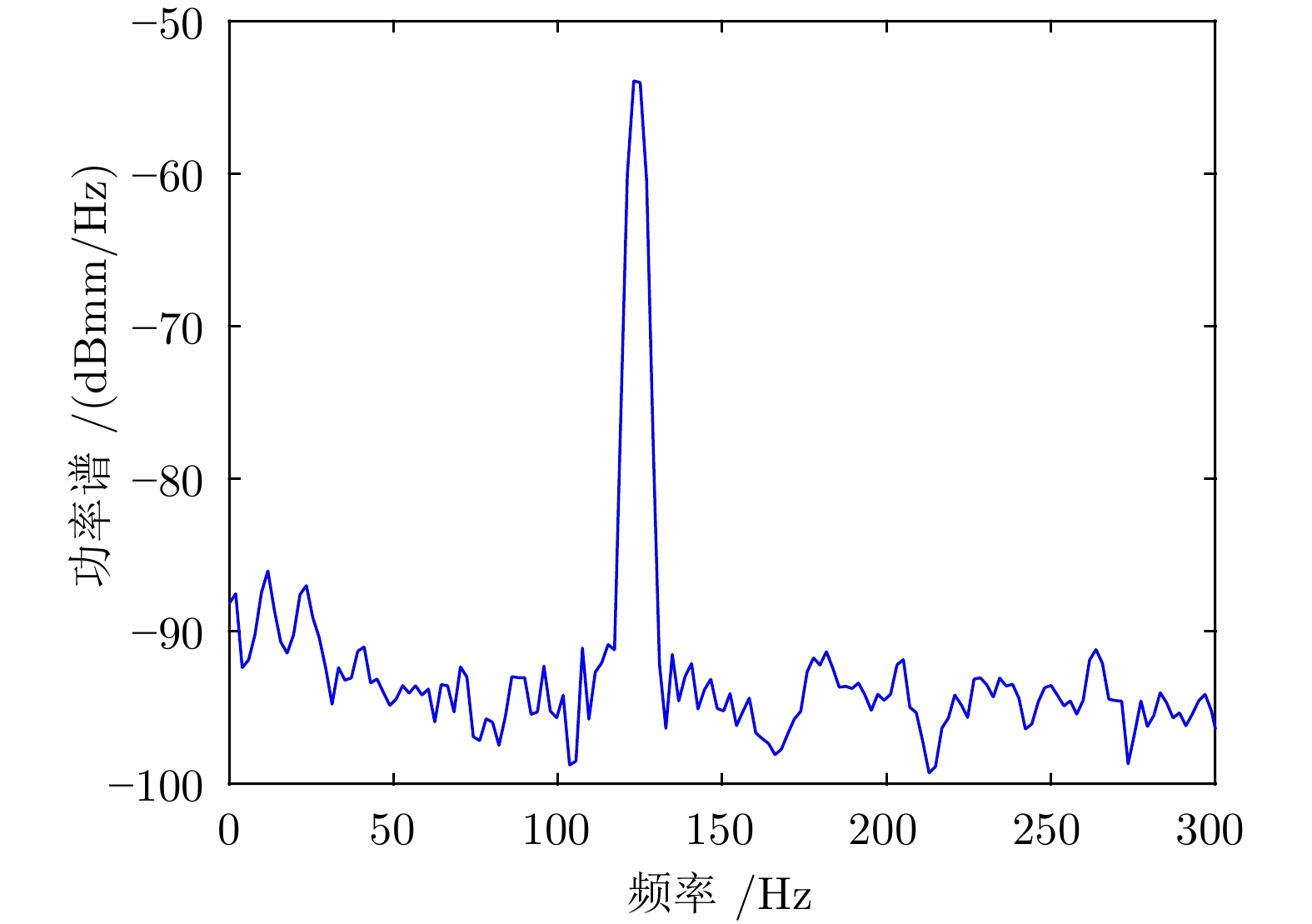
表 1
$\hat {{ \theta} }_1 $ 和$\hat {{ \theta} }_2 $ 的后2项参数辨识结果Table 1 Identification results of the last two terms of
$\hat {{ \theta} }_1 $ and$\hat {{ \theta} }_2$ $n$ $\hat {{ \theta} }_1 (n)$ $\hat {{ \theta}}_2 (n)$ 真值 7 1.95936 1.95936 1.95952 8 −0.99803 −0.99803 −0.99803  下载: 导出CSV
下载: 导出CSV
表 2
$\hat {{ \theta} }_1 $ 和$\hat {{ \theta}}_2 $ 的前6项参数辨识结果Table 2 Identification results of the first six terms of
$\hat {{ \theta} }_1 $ and$\hat {{ \theta} }_2$ $n$ $\hat { { \theta} }_1 (n)$ $\hat { { \theta} }_2 (n)$ 1 $-5.1\times10^{-18}$ $2.89 \times 10^{-18}$ 2 $-7.64\times10^{-9}$ $13.1\times10^{-9}$ 3 $7.61\times10^{-9}$ $-13.0\times10^{-9}$ 4 $5.2 \times 10^{-18}$ $-2.9 \times 10^{-18}$ 5 $3.70\times10^{-9}$ $-6.34\times10^{-9}$ 6 $-3.68\times10^{-9}$ $6.31\times10^{-9}$
下载: 导出CSV
-
[1] 1 Zhou D F, Hansen C H, Li J, Chang W S. Review of coupled vibration problems in EMS maglev vehicles. International Journal of Acoustics and Vibration, 2010, 15(1): 10−23 [2] Alberts T E, Oleszczuk G, Hanasoge A M. Stable levitation control of a magnetically suspended vehicles with structural flexibility. In: Proceedings of the 2008 American Control Conference. Seattle, USA: IEEE, 2008. 4035−4040 [3] 3 Kim K J, Han J B, Han H S, Yang S J. Coupled vibration analysis of maglev vehicle-guideway while standing still or moving at low speeds. Vehicle System Dynamics, 2015, 53(4): 587−601 doi: 10.1080/00423114.2015.1013039 [4] Lee N, Han H, Lee J, Kang B. Maglev vehicle/guideway dynamic interaction based on vibrational experiment. In: Proceedings of the 2007 International Conference on Electrical Machines and Systems. Seoul, Korea: IEEE, 2007. 598−602 [5] 顾行涛. 高速磁浮车辆 − 道岔梁耦合振动建模与仿真分析[硕士学位论文], 西南交通大学, 2009.Gu Xing-Tao. Modeling and Simulation of the High Speed Maglev Vehicle-Turnout Coupling Vibration [Master thesis], Southewest Jiaotong University, China, 2009. [6] 李莉, 孟光. 慢起慢落时磁浮车辆与钢轨道框架耦合共振分析. 振动与冲击, 2006, 25(6): 46−48, 75 doi: 10.3969/j.issn.1000-3835.2006.06.0126 Li Li, Meng Guang. Analysis of the maglev vehicle and steel guideway frame coupled resonance during levitating up and landing. Journal of Vibration and Shock, 2006, 25(6): 46−48, 75 doi: 10.3969/j.issn.1000-3835.2006.06.012 [7] 7 Zhou D F, Hansen C H, Li J. Suppression of maglev vehicle-girder self-excited vibration using a virtual tuned mass damper. Journal of Sound and Vibration, 2011, 330: 883−901 doi: 10.1016/j.jsv.2010.09.018 [8] Deng Y Q, Liang H Q, Luo S H. Static levitation stability simulation and control of maglev. In: Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China: IEEE, 2006. 6213−6216 [9] 9 Wang H P, Li J, Zhang K. Stability and Hopf bifurcation of the maglev system with delayed speed feedback control. Acta Automatica Sinica, 2007, 33(8): 829−834 doi: 10.1360/aas-007-0829 [10] Zhou D F, Li J, Zhang K. An adaptive control method to suppress the maglev track-induced self-excited vibration. In: Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks, Shanghai, China: IEEE, 2011. 4723−4727 [11] 于天俊, 张伟, 杨晓东. 柔性多梁结构的解析模态分析. 全国结构工程学术会议, 中国, 厦门, 2015, I-586−I-590Yu Tian-Jun, Zhang Wei, Yang Xiao-Dong. Linear modal analysis of flexible multi-beam structures. In: Proceedings of the 2015 National Conference on Structural Engineering, Xiamen, China, 2015, I-586−I-590 [12] 12 Zhou D F, Li J, Hansen C H. Application of least mean square algorithm to suppression of maglev track-induced self-excited vibration. Journal of Sound and Vibration, 2011, 330: 5791−5811 doi: 10.1016/j.jsv.2011.07.021 [13] 13 Zhou D F, Yu P C, Li J, Cui P, Song M X. Adaptive vibration control of the electromagnet-track coupled high frequency resonance for an urban maglev system. Transportation Systems and Technology, 2018, 4(2): 92−106 doi: 10.17816/transsyst20184292-106 [14] 邹东升, 佘龙华, 常文森. 抑制磁浮系统车轨耦合振动的自适应陷波滤波器设计. 信息与控制, 2009, 38(2): 234−244 doi: 10.3969/j.issn.1002-0411.2009.02.01914 Zou Dong-Sheng, She Long-Hua, Chang Wen-Sen. Design of adaptive notch filter to suppress coupled vibration of maglev vehicle and guideway system. Information and Control, 2009, 38(2): 234−244 doi: 10.3969/j.issn.1002-0411.2009.02.019 [15] Svetlitsky V A. Engineering Vibration Analysis (Worked Problems 2). Berlin: Springer-Verlag, 2004. [16] 李云钢, 常文森. 磁浮列车悬浮系统的串级控制. 自动化学报, 1999, 25(2): 247−25116 Li Yun-Gang, Chang Wen-Sen. Cascade control of an EMS maglev vehicle's levitation control system. Acta Automatica Sinica, 1999, 25(2): 247−251 [17] 17 Zhou D F, Li J, Zhang K. Amplitude control of the track-induced self-excited vibration for a maglev system. ISA Transactions, 2014, 53(5): 1463−1469 doi: 10.1016/j.isatra.2013.12.016 [18] 何修宇, 王雪璇, 赵哲惟, 张爽. 浮式海洋热能转换系统的主动振动控制与扰动观测器设计. 自动化学报, 2019, 45(10): 1846−1856 doi: 10.16383/j.aas.c18019718 He Xiu-Yu, Wang Xue-Xuan, Zhao Zhe-Wei, Zhang Shuang. Disturbance rejection and vibration control for a floating ocean thermal energy conversion system. Acta Automatica Sinica, 2019, 45(10): 1846−1856 doi: 10.16383/j.aas.c180197 [19] 19 Chopade A S, Khubalkar S W, Junghare A S, Aware M V, Das S. Design and implementation of digital fractional order PID controller using optimal pole-zero approximation method for magnetic levitation system. IEEE/CAA Journal of Automatica Sinica, 2018, 5(5): 977−989 doi: 10.1109/JAS.2016.7510181 -

 下载:
下载:





























计量
- 文章访问数: 3304
- HTML全文浏览量: 616
- PDF下载量: 185
- 被引次数: 0
