

Hybrid Filter Based Expectation Maximization Algorithm for High-speed Train Modeling
-
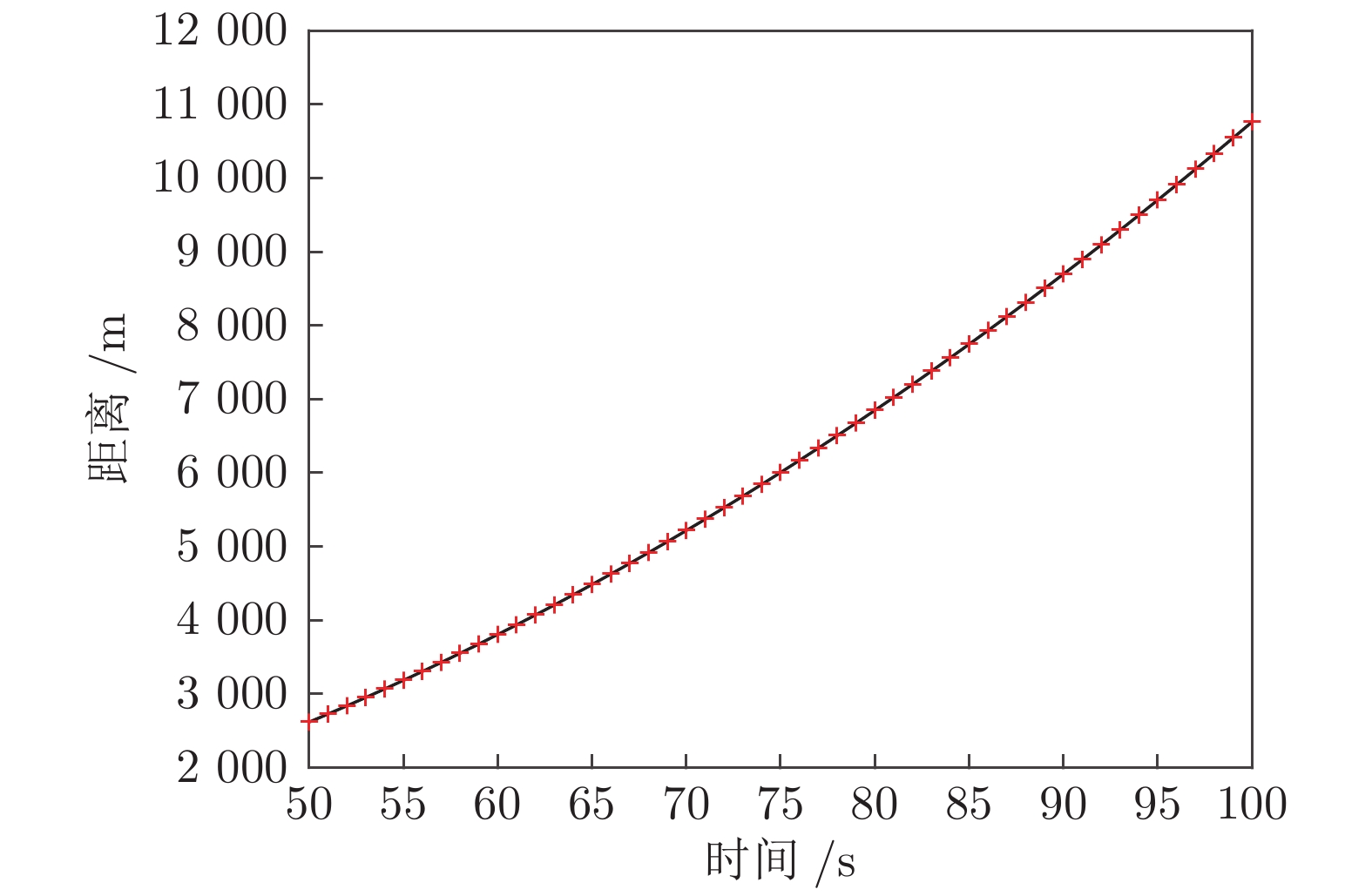
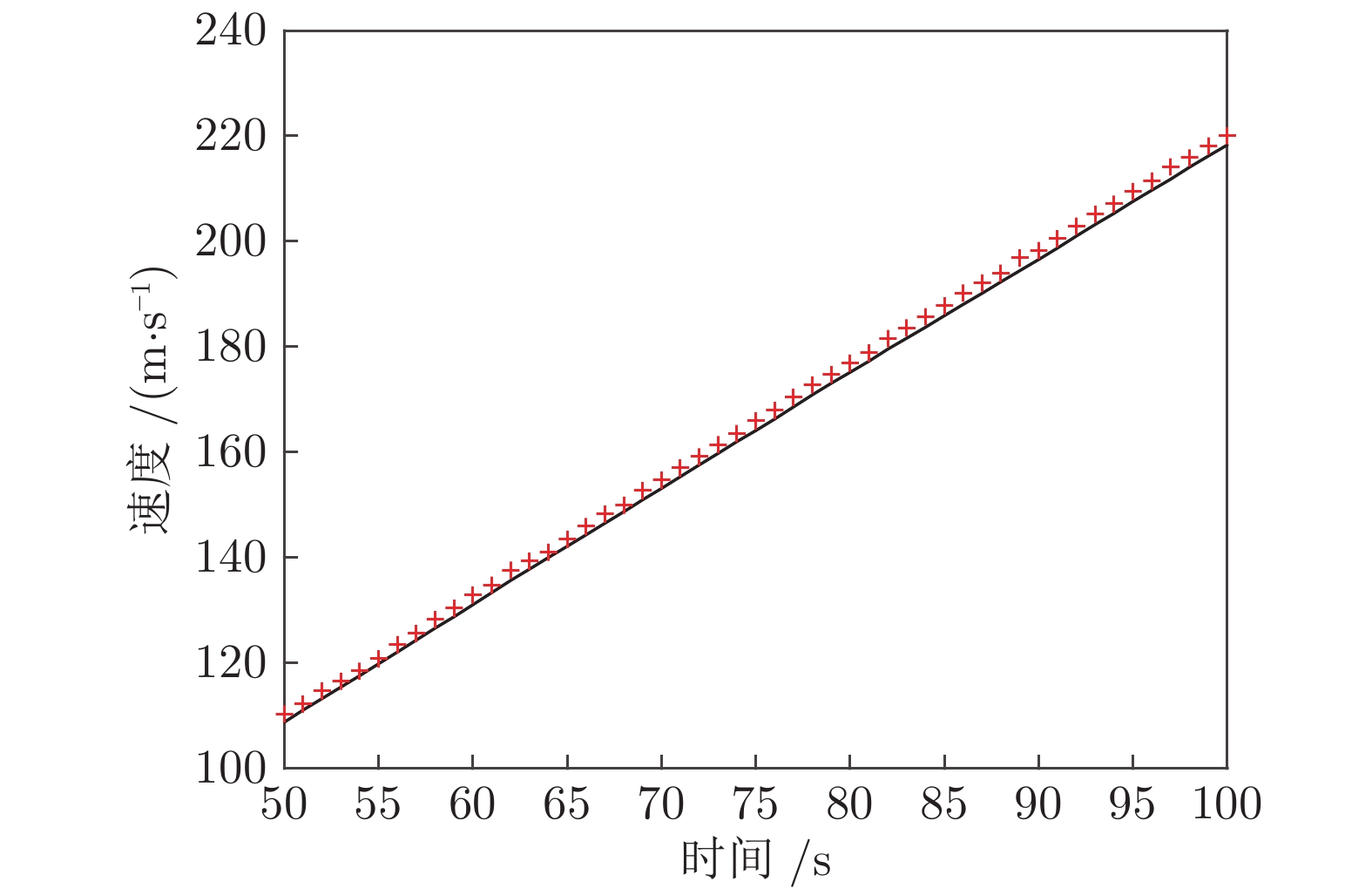
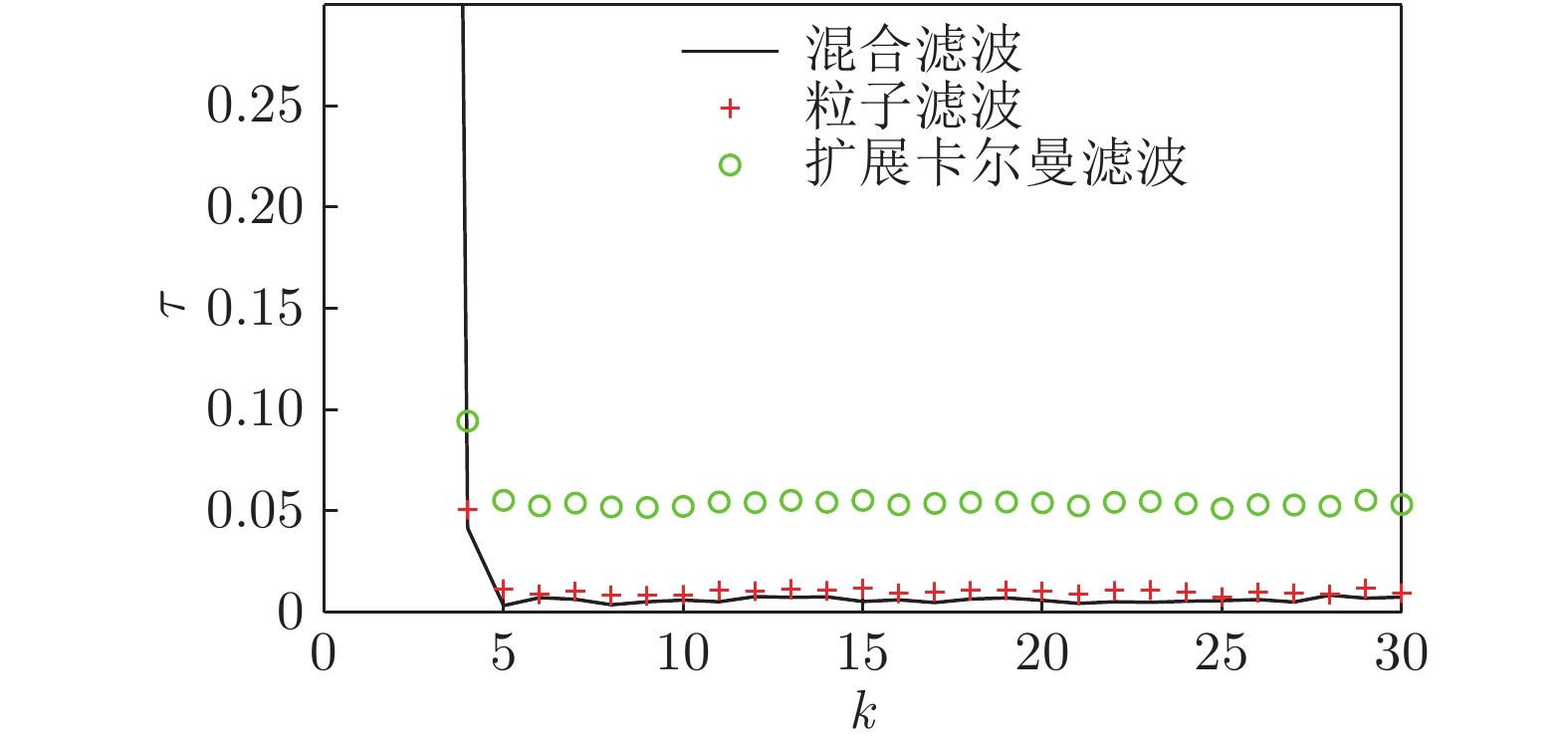
摘要: 针对高速列车非线性单质点模型的特殊结构及含有隐含变量问题, 提出一种基于混合滤波的最大期望辨识方法. 借助递阶辨识理论, 将高铁列车状态空间模型分解为线性子系统模型和非线性子系统模型. 进而, 分别利用卡尔曼滤波和粒子滤波对速度和位移状态进行联合估计. 最后, 使用最大期望方法辨识高铁列车子系统模型参数, 解决了隐含变量辨识问题. 和传统方法相比, 本文所提出方法计算量小, 且具有较高的辨识精度. 仿真对比实验结果验证了该方法的有效性.Abstract: For the special high-speed train model structure with hidden variables in the form of the single mass-point, a hybrid filter based expectation maximization (EM) algorithm is proposed. By employing the hierarchical identification theory, the high-speed train state-space model is decomposed into a linear subsystem and a nonlinear subsystem. Furthermore, the Kalman filter and the particle filter are provided to estimate the velocity and displacement, respectively. Finally, the parameters of subsystems are identified by using the EM algorithm. Compared to the classical methods, the proposed algorithm can produce high accuracy estimation with less computational effort. The simulation results verify the effectiveness of the algorithm.
-
二维系统与现代过程控制密切相关, 在污水处理、多维数字滤波器、卫星气象云图分析、图像处理等领域有广泛的应用[1-2].由于二维系统具有丰富的工程物理背景, 至今仍是控制领域的研究热点之一.近年来二维系统的分析和控制器设计方面取得了诸多成果, 如文献[3]给出了二维离散线性模型的稳定性判据, 文献[4]给出了二维离散系统的状态反馈控制器设计方法.在此基础上, 二维系统的滤波器设计、$ {H_\infty} $控制等问题也得到了深入研究[5-6].
另一方面, 现代工业过程对于系统安全性和可靠性的要求日益提高, 因此故障检测与故障诊断问题越来越受到重视[7-10].与一维系统相比, 二维系统由于结构复杂, 其故障检测滤波器/观测器的设计难度更大, 需要提出新技术解决设计过程中遇到的非凸问题.此外, 二维系统的残差评价函数以及阈值的设计亦不同于一维系统, 需根据二维系统的特点构造合适的残差评价函数及阈值.因此, 研究二维系统的故障检测问题是非常必要的, 也是存在挑战的.然而, 现有文献的研究成果相对较少, 其中文献[11-13]研究了二维系统的故障检测问题, 采用了全频设计方法, 即没有考虑故障发生的有限频信息; 文献[14]研究了二维Roesser系统在传感器失效情况下的故障检测问题; 文献[15]研究了二维FM系统的故障检测问题.
文献[16]指出, 系统设计时控制单元和故障检测单元是相互关联和作用的, 如果将控制单元和故障检测单元分开设计, 容易忽视两个单元间的关联性:设计控制单元时容易影响故障检测效果, 而设计故障检测单元时可能会影响控制效果.解决该问题的方法之一是采用集成设计策略, 一方面可减少设计步骤, 一定程度上降低设计的复杂度[17]; 另一方面, 集成设计可以考虑控制单元和故障检测单元的关联性和相互作用, 即兼顾和平衡控制性能和故障检测性能.此外, 集成设计也有助于在控制器中结合容错特性[18].目前, 集成设计的研究成果主要集中在一维系统[19], 二维系统的相关研究成果较少[20]. FM模型作为一类重要的二维系统模型, 其同时故障检测与控制方法具有一定的理论意义和实际应用价值, 但该研究未见相关报道, 这是本文的研究动机之一.
本文研究二维FM系统的同时故障检测与控制问题, 采用有限频性能指标刻画故障和干扰信号的有限频特性, 提出构造切平面方法和两步算法来解决设计过程中出现的非凸问题.本文所设计的故障检测滤波器/控制器可以同时实现控制功能和故障检测功能.此外, 以往研究成果常采用递增的残差评价函数, 故障被排除后容易产生故障误报.本文针对二维系统的故障检测问题, 采用新的残差评价函数, 可降低故障误报率.
1. 系统模型
考虑如下二维离散FM模型[21]:
$$ \begin{align} {\pmb x}({ i} + 1, { j} + 1) = \, & A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j}) +\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j}) +\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j}) \\ \pmb y({ i}, { j}) = \, &C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j}) \\ \pmb z({ i}, { j}) = \, &E{\pmb x}({ i}, { j}) +F_{ u} {\pmb u}({ i}, { j}) \end{align} $$ (1) 其中, $ \pmb x(i, j) \in {\bf R}^n $为状态向量, $ \pmb d(i, j) \in {\bf R}^{{n_d}} $为外部扰动, $ \pmb f(i, j) \in {\bf R}^{{n_f}} $为故障信号, $ \pmb y(i, j) \in {\bf R}^{{n_y}} $为测量输出, $ \pmb z(i, j)\in {\bf R}^{{n_z}} $为被控输出, $ {A_1} $, $ {A_2} $, $ {B_{u1}} $, $ {B_{u2}} $, $ {B_{f1}} $, $ {B_{f2}} $, $ {B_{d1}} $, $ {B_{d2}} $, $ C $, $ {D_d} $, $ {D_f} $, $ E $, $ {F_u} $为已知的具有适当维数的常数矩阵.
注1. 对于FM模型, 由于状态向量$ \pmb x(i+1, j+1) $可以看做$ i $方向上对$ \pmb x(i, j+1) $或者是在$ j $方向上对$ \pmb x(i, j+1) $进行的一步前移运算, 故FM模型需要三个向量来描述[22].
本文目标是构造如下形式的故障检测滤波器/控制器:
$$ \begin{align} \hat{\pmb x}(i + 1, j + 1) = \, &{\hat A_1} \hat{\pmb x}(i, j + 1) + {\hat A_2} {\hat{\pmb x}}(i + 1, j) +\\ & {\hat B_1}\pmb y(i, j + 1) + {\hat B_2}\pmb y(i + 1, j) \\ \pmb u(i, j) = \, & {\hat C_c} \hat{\pmb x}(i, j) \\ \hat{\pmb y}(i, j) = \, & {\hat C_0} \hat{\pmb x}(i, j) \end{align} $$ (2) 其中, $ \hat{\pmb x}(i, j) \in {\bf R}^n $为状态估计, $ \pmb u(i, j) \in{\bf R}^{{n_u}} $为控制输入, $ \hat{\pmb y}(i, j) \in {\bf R}^{{n_y}} $是对输出的估计, $ {\hat A_1} $, $ {\hat A_2} $, $ {\hat B_1} $, $ {\hat B_2} $, $ {\hat C_0} $, $ {\hat C_c} $是待定的滤波器和控制器参数.
定义$ \bar{\pmb x}(i, j) = \left[{\begin{array}{*{20}{c}} {{\pmb x^{\rm T}(i, j)}}&{ \hat{\pmb x}^{\rm T}(i, j)}\end{array}}\right] ^{\rm T} $, 及残差信号$ \tilde{\pmb y}(i, j) = \pmb y(i, j) - \hat{\pmb y}(i, j), $结合式(1)和式(2)可得增广系统:
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, & {\bar A_1}\bar{\pmb x}(i, j + 1) + {\bar A_2}\bar{\pmb x}(i+ 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1)+ {\bar B_{d2}}\pmb d(i + 1, j) +\\ & {\bar B_{f1}}\pmb f(i, j + 1)+ {\bar B_{f2}}\pmb f(i + 1, j)\\ \tilde{\pmb y}(i, j) = \, & \tilde C\bar{\pmb x}(i, j) + {\tilde D_d}\pmb d(i, j) + {\tilde D_f}\pmb f(i, j)\\ {\pmb z}(i, j) = \, & \tilde E \bar{\pmb x}(i, j) \end{align} $$ (3) 其中
$$ \begin{align} \, &{\bar A_1} = \left[ {\begin{array}{*{20}{c}} {{A_1}}&{{B_{u1}}{{\hat C}_c}}\\ {{{\hat B}_1}C}&{{{\hat A}_1}} \end{array}} \right], \; {\bar A_2} = \left[ {\begin{array}{*{20}{c}} {{A_2}}&{{B_{u2}}{{\hat C}_c}}\\ {{{\hat B}_2}C}&{{{\hat A}_2}} \end{array}} \right] \\ \, &{\bar B_{d1}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_1}\\ {{{\hat B}_1}{D_d}} \end{array}} \right], \; {\bar B_{d2}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_2}\\ {{{\hat B}_2}{D_d}} \end{array}} \right] \\ \, &{\bar B_{f1}} = \left[ {\begin{array}{*{20}{c}} {{B_{f1}}}\\ {{{\hat B}_1}{D_f}} \end{array}} \right], \; {\bar B_{f2}} = \left[ {\begin{array}{*{20}{c}} {{B_{f2}}}\\ {{{\hat B}_2}{D_f}} \end{array}} \right] \\ \, &\tilde C = [\begin{array}{*{20}{c}} C&{ - {{\hat C}_0}} \end{array}], \; {\tilde D_d} = {D_d} \\ \, &{\tilde D_f} = {D_f}, \; \tilde E = [\begin{array}{*{20}{c}} E&{{F_u}{{\hat C}_c}} \end{array}] \end{align} $$ (4) 2. 问题描述与预备知识
增广系统从故障$ \pmb f(i, j) $、干扰$ \pmb d(i, j) $到残差$ \tilde{\pmb y}(i, j) $和被控输出$ \pmb z(i, j) $的传递函数分别由下式给出:
$$ \begin{align} {G_{\tilde yf}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} -{z_1}{\bar A_2})^{-1}}({z_2}{\bar B_{f1}} +\\ & {z_1}{\bar B_{f2}}) +{\tilde D_f} \end{align} $$ (5) $$ \begin{align} {G_{\tilde yd}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+\\ & {z_1}{\bar B_{d2}}) + {\tilde D_d} \end{align} $$ (6) $$ \begin{align} {G_{zf}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{f1}}+ {z_1}{\bar B_{f2}}) \end{align} $$ (7) $$ \begin{align} {G_{zd}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+ {z_1}{\bar B_{d2}}) \end{align} $$ (8) 其中, $ {z_1} = {{\rm e}^{j\omega_1}} $, $ {z_2} = {{\rm e}^{j\omega_2}} $.
本文要讨论的问题可归纳为:对于给定的二维FM系统, 设计故障检测滤波器/控制器(2), 使增广系统(3)渐近稳定, 同时满足如下控制指标和故障检测指标:
$$ \begin{align} &\inf {\sigma _{\min }}({G_{\tilde yf}}({\omega _1}, {\omega _2})) > {\gamma _1}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (9) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zf}}({\omega _1}, {\omega _2})) < {\beta _1}, \; \forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (10) $$ \begin{align} &\sup {\sigma _{\max }}({G_{\tilde yd}}({\omega _1}, {\omega _2})) < {\gamma _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (11) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zd}}({\omega _1}, {\omega _2})) < {\beta _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (12) 这里, $ {\gamma _1} $, $ {\gamma _2} $, $ {\beta _1} $, $ {\beta _2} $是给定的正标量, $ {\bar \omega _{k1}} $, $ {\bar \omega _{k2}} \in \left[ {0, \pi } \right] $, $ k = 1, 2 $.
注2. 有限频$ {H_ - } $指标(9)和有限频$ {H_\infty} $指标(10)$ \sim $ (12)是相应全频域指标的推广, 当$ {\bar \omega _{11}} = \bar \omega _{12} = \bar \omega _{21} = \bar \omega _{22} = \pi $时, 有限频性能指标退化为全频性能指标.
注3. 式(9)和式(11)为故障检测性能指标, 这两个指标保证了发生在有限频域的故障对残差信号有足够大的影响, 同时外部干扰对残差信号的影响较小; 式(10)和式(12)为控制性能指标, 即抑制故障和干扰信号对被控输出的影响, 保证系统有一定的鲁棒性.
本文需要用到如下引理:
引理 1[23]. 对于给定的对称矩阵$ \Psi $和矩阵$ \Gamma $, $ \Lambda $, 存在矩阵$ X $, 满足$ \Psi + \Gamma X{\Lambda ^{\rm T}} + \Lambda {X^{\rm T}}\Gamma < 0 $, 当且仅当以下等式成立:
$$ \begin{align} {\Gamma ^ \bot }\Psi {\Gamma ^ \bot }^{\rm T} < 0 , {\Lambda ^ \bot }\Psi {\Lambda ^ \bot }^{\rm T} < 0 \end{align} $$ 引理 2[24]. 假设$ \pmb \xi \in {\bf R}^n $, $ P = {P^{\rm T}} \in {\bf R}^{n \times n} $, $ H \in {\bf R}^{m \times n} $, rank$ (H) = r < n $, 则下列命题等价:
i) $ {\pmb \xi ^{\rm T}}P\pmb \xi < 0, \; \; \forall H\pmb \xi = 0, \pmb \xi \ne 0 $
ii) $ \exists X\in {\bf R}^{n \times m}, \; \; P + X^{\rm T}H^{\rm T} + H {X} < 0 $
引理 3[25]. 对于增广系统(3), 假设存在条件$ \det ({z_1}{z_2}I - $ $ {z_2}{\bar A_1}-{z_1}{\bar A_2})^{- 1}\ne 0 $, $ \forall \left({{z_1}, {z_2}} \right) \in \Big\{ {\left( {{z_1}, {z_2}} \right) \in {{\bf C} \times {\bf {C}}}:\left| {{z_1}} \right| \ge 1, \left| {{z_2}} \right| \ge 1} \Big\} $, 给定对称矩阵$ {\Theta} $和标量$ {\bar \omega _1}, $ $ {\bar \omega _2} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {P_k}, $ $ {Q_k}>0 \in{ {{\bf {C}}}^{n \times n}} $, $ k = 1, 2 $, 使得下式成立:
$$ \begin{align} {\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right]^{\rm T}}{\Sigma}\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right] + {\Theta}< 0 \end{align} $$ (13) 其中
$$ \begin{equation} \begin{aligned} \bar A & = \left[ {{{\bar A}_1}, {{\bar A}_2}} \right], {\Sigma } = \left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\\ P& = {P_1} + {P_2}, Q = \left[ {\begin{array}{*{20}{c}} {Q_1}&{Q_2} \end{array}} \right], {\bar B_f} = \left[ {\begin{array}{*{20}{c}} {\bar B_{f1}}&{\bar B_{f2}} \end{array}} \right]\\ \Delta& = {\rm diag}\left\{{-{P_1}-2\cos{{\bar\omega}_1}{Q_1}, -{P_2}- 2\cos{{\bar\omega}_2}{Q_2}} \right\}\\ \bar C & = {\rm diag}\left\{ {\tilde C, \tilde C} \right\}, {\bar D_f} = {\rm diag}\left\{ {{{\tilde D}_f}, {{\tilde D}_f}} \right\} \end{aligned} \end{equation} $$ (14) 则下面的有限频条件成立:
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]^{\rm T} {\Theta} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right] < 0, \; \forall ({\omega _1}, {\omega _2}) \in \Omega \end{equation} $$ (15) 其中
$$ \begin{equation} \begin{aligned} &\bar G\left( {{\omega _1}, {\omega _2}} \right) = {\left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}G\left( {{\omega _1}, {\omega _2}} \right)}\\ {{{\rm e}^{{\rm j}{\omega _1}}}G\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]}\\ &I\left( {{\omega _1}, {\omega _2}} \right) = \left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}{I}}\\ {{{\rm e}^{{\rm j}{\omega _1}}}{I}} \end{array}} \right]\\ &G({\omega _1}, {\omega _2}) = ({{\rm e}^{{\rm j}({\omega _1} + {\omega _2})}}{I_n} - {{\rm e}^{{\rm j}{\omega _2}}}{{\bar A_1}}-\\ &\qquad \qquad {{\rm e}^{{\rm j}{\omega _1}}}{\bar A_2})^{ - 1}({{\rm e}^{{\rm j}{\omega _2}}}{\bar B_{f1}} + {{\rm e}^{{\rm j}{\omega _1}}}{\bar B_{f2}})\\ &\Omega = \left[ { - {{\bar \omega }_1}, {{\bar \omega }_1}} \right] \times \left[ { - {{\bar \omega }_2}, {{\bar \omega }_2}} \right] \end{aligned} \end{equation} $$ (16) 引理 4[26]. 若存在正定矩阵$ P_{s1}, P_{s2} $使得下式成立
$$ \begin{equation} {\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right]^{\rm T}}\left[ {\begin{array}{*{20}{c}} P_s&0\\ 0&{{\rm diag}\left\{ { - {P_{s1}}, - {P_{s2}} }\right\}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right] < 0 \end{equation} $$ (17) 则增广系统(3)渐近稳定, 其中$ P_s = P_{s1}+P_{s2} $.
3. 主要结果
定理 1. 给定标量$ {\bar \omega _{11}} $, $ {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, $ {\gamma _1} > 0 $, $ \alpha > 0 $, 如果存在对称矩阵$ {P_{k1}} $, $ {P_{k3}} $, $ {Q_{k1}} $, $ {Q_{k3}} $和矩阵$ {P_{k2}} $, $ {Q_{k2}} $, $ k = 1, 2 $, $ {G_1} $, $ {G_2} $, $ {G_3} $, $ {F_1} $, $ {F_2} $, $ {F_3} $, $ {F_4} $, $ {H_1} $, $ {H_2} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
$$ \begin{equation} {\alpha ^2} - {\hat C_0}T < 0 \end{equation} $$ (18) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{Q_{k1}}}&{{Q_{k2}}}\\ {Q_{k2}^{\rm T}}&{{Q_{k3}}} \end{array}} \right] > 0, \quad k = 1, 2 \end{equation} $$ (19) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{\gamma _{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{\gamma _{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation} $$ (20) 其中
$$ \begin{align*} {\gamma _{11}} = \, & {P_{11}}+{P_{21}} - {G_1} - G_1^{\rm T}\\ {\gamma _{12}} = \, & {P_{12}}+{P_{22}} - {G_3} - G_2^{\rm T}\\ {\gamma _{13}} = \, & {Q_{11}} + {G_1}{A_1} + {\tilde B_1}C- F_1^{\rm T}\\ {\gamma _{14}} = \, & {Q_{12}} + {G_1}{B_{u1}}{\hat C_c} + {\tilde A_1}- F_2^{\rm T}\\ {\gamma _{15}} = \, & {Q_{21}} + {G_1}{A_2} + {\tilde B_2}C- F_3^{\rm T}\nonumber\\ {\gamma _{16}} = \, & {Q_{22}} + {G_1}{B_{u2}}{\hat C_c} + {\tilde A_2}- F_4^{\rm T}\\ {\gamma _{17}} = \, & {G_1}{B_{f1}} + {\tilde B_1}{D_f} -H_1^{\rm T}\nonumber\\ {\gamma _{18}} = \, & {G_1}{B_{f2}} + {\tilde B_2}{D_f} -H_2^{\rm T}\nonumber\\ {\gamma _{22}} = \, & {P_{13}}+{P_{23}} - {G_3} - G_3^{\rm T}\\ {\gamma _{23}} = \, & Q_{12}^{\rm T} -G_{3}^{\rm T}+ {G_2}{A_1} + {\tilde B_1}C\nonumber\\ {\gamma _{24}} = \, & {Q_{13}}-{G_{3}^{\rm T}}+{G_2}{B_{u2}}{\hat C_c} +{\tilde A_1}\\ {\gamma _{25}} = \, & Q_{22}^{\rm T} -{G_{3}^{\rm T}}+ {G_2}{A_2} + {\tilde B_2}C\\ {\gamma_{26}} = \, & {G_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {Q_{23}}-G_3^{\rm T} \end{align*} $$ $$ \begin{align} {\gamma _{27}} = \, & {G_2}{B_{f1}} + {\tilde B_1}{D_f}\\ {\gamma _{28}} = \, & {G_2}{B_{f2}} + {\tilde B_2}{D_f}\\ {\gamma_{33}} = \, & - {P_{11}} - 2\cos {\bar\omega _{11}}{Q_{11}} - {C^{\rm T}}C+\\ & {F_1}{A_1} + {\tilde B_1}C + {({F_1}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{34}} = \, & - {P_{12}} - 2\cos {\bar\omega _{12}}{Q_{12}} - {C^{\rm T}}{\hat C_0}+\\ & ({F_1}{B_{u1}}{\hat C_c} + {\tilde A_1}) + {({F_2}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{35}} = \, & {({F_3}{A_1} + {\tilde B_1}C)^{\rm T}} + {F_1}{A_2} + {\tilde B_2}C\\ {\gamma _{36}} = \, & {F_1}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{A_1} + {\tilde B_1}C)^{\rm T}} \\ {\gamma _{37}} = \, &{F_1}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_1})^{\rm T}} -{{C}^{\rm T}}{D_f}\\ {\gamma _{38}} = \, &{F_1}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{A_1})^{\rm T}}\\ {\gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar\omega_{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - {\alpha ^2}I \\ {\gamma _{45}} = \, & ({F_2}{A_2} + {\tilde B_2}C) + {({F_3}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}}\\ {\gamma _{46}} = \, &{F_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} \\ {\gamma _{47}} = \, & {F_2}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u1}}{\hat C_c})^{\rm T}} + {{\hat C_0}^{\rm T}}{D_f} \\ {\gamma _{48}} = \, & {F_2}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u1}}{\hat C_c})^{\rm T}} \\ {\gamma _{55}} = \, & - {P_{21}} - 2\cos {\bar\omega _{11}}{Q_{21}} + {F_3}{A_2} + {\tilde B_2}C +\\ & {({F_3}{A_2} + {\tilde B_2}C)^{\rm T}} - {C^{\rm T}}C \\ {\gamma _{56}} = \, & - {P_{22}} - 2\cos {\bar\omega _{12}}{Q_{22}} + {F_3}{B_{u2}}{\hat C_c}+ {\tilde A_2}+\\ & {C^{\rm T}}{\hat C_0} + {({F_4}{A_2} + {\tilde B_2}C)^{\rm T}} \\ {\gamma _{57}} = \, & {F_3}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_2})^{\rm T}} \\ {\gamma _{58}} = \, & {F_3}{B_{f2}} + {({H_2}{A_2})^{\rm T}} + {\tilde B_2}{D_f} - {{C}^{\rm T}}{D_f}\\ {\gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar\omega _{12}}{Q_{23}} - {{\alpha ^2}I } + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}, \\ {\gamma _{67}} = \, & {F_4}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u2}}{\hat C_c})^{\rm T}}\\ {\gamma _{68}} = \, &{F_4}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u2}}{\hat C_c})^{\rm T}} + {{\hat C_0}}{D_f} \\ {\gamma _{77}} = \, & {H_1}{B_{f1}} + {({H_1}{B_{f1}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \\ {\gamma _{78}} = \, & {H_1}{B_{f2}} + {({H_2}{B_{f1}})^{\rm T}}\\ {\gamma _{88}} = \, & {H_2}{B_{f2}} + {({H_2}{B_{f2}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \end{align} $$ (21) 证明. 令式(13)中的
$$ \begin{equation*} \begin{aligned} \Theta = \, &\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} {-I}&0\\ 0&{\gamma _1}^2I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 则有限频条件(15)等价于$ {{G^{\rm T}}_{\tilde yf}}({\omega _1}, {\omega _2}){G}_{\tilde yf}({\omega _1}, {\omega _2})>{\gamma _1}^2I $, 即性能指标(9).由引理3知, 若式(13)成立, 则增广系统(3) $满足性能指标(9).式(13)可改写为
$$ \begin{equation} \begin{aligned} {\Lambda^{\rm T}}\Omega \ {\Lambda } < 0 \end{aligned} \end{equation} $$ (22) 其中
$$ \begin{align*} \Lambda = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_f^{\rm T}}&0&I \end{array}} \right]^{\rm T} \end{align*} $$ $$ \begin{align*} \Omega = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_f^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { - I}&0\\ *&{{\gamma _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_f}}\\ 0&0&I \end{array}} \right] \end{align*} $$ 令
$$ \begin{equation*} \Gamma = \left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_f}} \end{array}} \right]^{\rm T}, \quad \pmb \eta = \Lambda \pmb \xi \end{equation*} $$ 则有$ {\Gamma ^{{\rm T}}}\pmb \eta = {\Gamma ^{{\rm T}}}\Lambda \pmb \xi = 0 $.根据引理2, 若以下不等式成立:
$$ \begin{equation*} \Omega + \Gamma {\rm X} + {{\rm X}^{\rm T}}{\Gamma ^{\rm T}} < 0 \end{equation*} $$ 则式(22)成立.取$ {X} = \left[ {\begin{array}{*{20}{c}} {{G^{\rm T}}}&{{F^{\rm T}}}&{{H^{\rm T}}} \end{array}} \right] $,
$$ \begin{equation*} \begin{aligned} G = \left[ {\begin{array}{*{20}{c}} {{G_1}}&{{G_3}}\\ {{G_2}}&{{G_3}} \end{array}} \right], F = \left[ {\begin{array}{*{20}{c}} {{F_1}}&{{G_3}}\\ {{F_2}}&{{G_3}}\\ {{F_3}}&{{G_3}}\\ {{F_4}}&{{G_3}} \end{array}} \right], H = \left[ {\begin{array}{*{20}{c}} {{H_1}}&0\\ {{H_2}}&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 并将式(4)中相关矩阵代入, 可得
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{{\tilde \gamma }_{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{{\tilde \gamma }_{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation*} $$ 其中
$$ \begin{equation*} \begin{aligned} {\tilde \gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar \omega _{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - \hat C_0^{\rm T}{\hat C_0}\\ {\tilde \gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar \omega _{12}}{Q_{23}} -{\hat C_0}^{\rm T}{\hat C_0} + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}\\ \end{aligned} \end{equation*} $$ 其他参数在式(21)中给出.需要注意的是$ {\tilde \gamma _{44}} $、$ {\tilde \gamma _{66}} $中存在耦合项$ \hat C_0^{\rm T}{\hat C_0} $.下面采用文献[27]中提出的方法, 给出处理耦合项的方案.假设$ {\hat C_0} $为行向量, 首先给出$ \hat C_0^{\rm T}{\hat C_0} $的上界, 即
$$ \begin{equation} \hat C_0^{\rm T}{\hat C_0} > {\alpha ^2}I \end{equation} $$ (23) 上式表明$ {\hat C_0} $的可行解是非凸的, 令
$$ {\hat C_0}T - {\left\| T \right\|_2}^2 = 0 $$ 其中, $ {\left\| T \right\|_2} = \alpha $表示半径为$ \alpha $的球的切平面, 则通过约束条件(18)即可找到式(23)的解的凸子集.由引理3可知, 若式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
注4. 该方法需要假设$ {\hat C_0} $为行向量, 即系统为单输入, 具有一定的局限性.
接下来考虑系统故障检测的鲁棒性条件.令$ \pmb f(i, j) = 0 $, 则增广系统变为
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, &{\bar A_1}\pmb x(i, j + 1) + {\bar A_2} \pmb x(i + 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1) + {\bar B_{d2}}\pmb d(i + 1, j) \end{align} $$ (24) 下面定理给出增广系统(3)满足性能指标(11)的充分条件.
定理 2. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\gamma_2}>0 $, 如果存在对称矩阵$ {P_{m1}} $, $ {P_{m2}} $, $ {Q_{m1}>0} $, $ {Q_{m2}}>0 $, 矩阵$ {M_1} $, $ {M_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(25)成立, 则增广系统(3)满足性能指标(11).
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\Gamma _{11}}}&{{\Gamma _{12}}}&{{\Gamma _{13}}}&0\\ *&{{\Delta _m}}&0&{{\Gamma _{24}}}\\ *&*&{ - {\gamma _2}^2I}&{{\Gamma _{34}}}\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation*} $$ (25) 其中
$$ \begin{equation*} \begin{aligned} \Gamma _{11} = \, & {P_{m1}} + {P_{m2}} - He\left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right]\\ {\Gamma _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {{\Gamma_{m1}}}&{{\Gamma_{m2}}} \end{array}} \right]\\ {{\Gamma_{m1}}} = \, &\left[\begin{array}{cc} {{M_1}{A_1} + {{\tilde B}_1}C}&{{M_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{M_2}{A_1} + {{\tilde B}_1}C}&{{M_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Gamma_{m2}}} = \, &\left[\begin{array}{cc} {{M_1}{A_2} + {{\tilde B}_2}C}&{{M_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{M_2}{A_2} + {{\tilde B}_2}C}&{{M_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right]\\ \Gamma _{13} = \, &\left[ {\begin{array}{*{20}{c}} {{M_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{M_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right]\\ {\Gamma _{24}} = \, &\left[ {\begin{array}{*{20}{c}} {{C^{\rm T}}}&0\\ { - {{\hat C}_0}^{\rm T}}&0\\ 0&{{C^{\rm T}}}\\ 0&{ - {{\hat C}_0}^{\rm T}} \end{array}} \right], {\Gamma _{34}} = {\rm diag}\left\{ {{{\tilde D}_d}, {{\tilde D}_d}} \right\} \end{aligned} \end{equation*} $$ 证明. 由引理3知, 若存在矩阵
$$ \begin{align*} {P_m} = \, & {P_{m1}} + {P_{m2}}, {Q_m} = \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}}\end{array}}\right], \\ {\Delta _m} = \, & {\rm diag}\Big\{ - {P_{m1}} - 2\cos {{\bar \omega }_{21}}{Q_{m1}}, - {P_{m2}} - \\& 2\cos {{\bar \omega }_{22}}{Q_{m2}} \Big\} \end{align*} $$ 使如下不等式成立:
$$ \begin{equation*} \begin{aligned} &\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]<0 \end{aligned} \end{equation*} $$ 则增广系统(3)满足性能指标(11).上式可改写为
$$ \begin{equation} {{\Upsilon} ^{\rm T}}{\Omega_1} {\Upsilon } < 0 \end{equation} $$ (26) 其中
$$ \begin{equation*} \begin{aligned} \Upsilon = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right]^{\rm T}\\ {\Omega_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_d^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ *&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_d}}\\ 0&0&I \end{array}} \right]\\ {\bar B_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar B}_{d1}}}&{{{\bar B}_{d2}}} \end{array}} \right]\\ {\bar D_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\tilde D}_d}}&0\\ 0&{{{\tilde D}_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \Gamma_m = {\left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_d}} \end{array}} \right]}^{\rm T} \end{equation*} $$ 则$ {{\Gamma_m}^ \bot } = \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right] $.根据引理1, 下式与式(26)等价,
$$ \begin{equation*} {\Omega_1}+ He\left( {\Gamma_m {M^{\rm T}}{Z ^{\rm T}}} \right) < 0 \end{equation*} $$ (27) 取$ Z = \left[ {\begin{array}{*{20}{c}} I&0&0 \end{array}} \right]^{\rm T} $, $ M = \left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right] $, 并令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 利用Schur $补引理可证.
定理 3. 给定标量$ {\bar \omega_{11}} $, $ {\bar\omega_{12}}\in\left[{0, \pi}\right] $, $ {\beta _1} > 0 $, 如果存在对称矩阵$ {P_{r1}} $, $ {P_{r2}} $, $ {Q_{r1}>0} $, $ {Q_{r2}>0} $, 矩阵$ {R_1} $, $ {R_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(26)成立, 则增广系统(3)满足性能指标(10).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Xi _{11}}}&{{\Xi _{12}}}&{{\Xi _{13}}}&0\\ *&{{\Delta _r}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta_1^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (28) 其中
$$ \begin{equation*} \begin{aligned} {\Xi _{11}} = \, & {P_{r1}} + {P_{r2}} - He\left[ {\begin{array}{*{20}{c}} {{R_1}}&{{G_3}}\\ {{R_2}}&{{G_3}} \end{array}} \right]\\ {\Xi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{r1}}}&{{Q_{r2}}} \end{array}} \right]+ \left[ {\begin{array}{*{20}{c}} {{\Xi_{r1}}}&{{\Xi_{r2}}} \end{array}} \right]\\ {{\Xi_{r1}}} = \, &\left[\begin{array}{cc} {{R_1}{A_1} + {{\tilde B}_1}C}&{{R_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{R_2}{A_1} + {{\tilde B}_1}C}&{{R_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Xi_{r2}}} = \, &\left[\begin{array}{cc} {{R_1}{A_2} + {{\tilde B}_2}C}&{{R_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{R_2}{A_2} + {{\tilde B}_2}C}&{{R_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Xi _{13}} = \, &\left[ {\begin{array}{*{20}{c}} {{R_1}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_1}{B_{f2}} + {{\tilde B}_2}{D_f}}\\ {{R_2}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_2}{B_{f2}} + {{\tilde B}_2}{D_f}} \end{array}} \right]\\ {\Xi _{24}} = \, & \left[ {\begin{array}{*{20}{c}} {{E^{\rm T}}}&0\\ { ({F_u}\hat C_c)^{\rm T}}&0\\ 0&{{E^{\rm T}}}\\ 0&{ ({F_u}\hat C_c)^{\rm T}} \end{array}} \right]\end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _r} = {\rm diag}\{ { - {P_{r1}} - 2\cos {{\bar \omega }_{11}}{Q_{r1}}, - {P_{r2}} - 2\cos {{\bar \omega }_{12}}{Q_{r2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理 4. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\beta _2} > 0 $, 如果存在对称矩阵$ {P_{u1}} $, $ {P_{u2}} $, $ {Q_{u1}>0} $, $ {Q_{u2}}>0 $, 矩阵$ {U_1} $, $ {U_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(27)成立, 则增广系统$ (3)满足性能指标(12).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Omega _{11}}}&{{\Omega _{12}}}&{{\Omega _{13}}}&0\\ *&{{\Delta _u}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta _2^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (29) 其中
$$ \begin{equation*} \begin{aligned} {\Omega _{11}} = \, & {P_{u1}} + {P_{u2}} - He\left[ {\begin{array}{*{20}{c}} {{U_1}}&{{G_3}}\\ {{U_2}}&{{G_3}} \end{array}} \right]\\ {\Omega _{12}} = \, &\left[ {\begin{array}{*{20}{c}} {{Q_{u1}}}&{{Q_{u2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {\Omega _{u1}}&{\Omega _{u2}} \end{array}} \right]\\ {\Omega _{u1}} = \, &\left[\begin{array}{cc} {{U_1}{A_1} + {{\tilde B}_1}C}&{{U_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{U_2}{A_1} + {{\tilde B}_1}C}&{{U_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {\Omega _{u2}} = \, &\left[\begin{array}{cc} {{U_1}{A_2} + {{\tilde B}_2}C}&{{U_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{U_2}{A_2} + {{\tilde B}_2}C}&{{U_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Omega _{13}} = \, & \left[ {\begin{array}{*{20}{c}} {{U_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{U_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _u} = {\rm diag}\{ { - {P_{u1}} - 2\cos {{\bar \omega }_{21}}{Q_{u1}}, - {P_{u2}} - 2\cos {{\bar \omega }_{22}}{Q_{u2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理1~4给出了故障检测滤波器/控制器设计需满足的有限频域性能条件, 由于广义KYP引理并不隐含系统的稳定性[28], 因此这些条件并不能保证所设计的系统是稳定的.下面给出增广系统(3)渐近稳定的充分条件:
定理 5. 如果存在正定矩阵$ { P_{s1}} $, $ { P_{s2}} $, 矩阵$ {S_1} $, $ {S_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $使不等式(28)成立, 则增广系统(3)渐近稳定.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Psi _{11}}}&{{\Psi _{12}}}\\ *&{{\Psi _{22}}} \end{array}} \right] < 0 \end{equation} $$ (30) 其中
$$ \begin{equation*} \begin{aligned} {\Psi _{11}} = \, & { P_{s1}} + { P_{s2}} - \left[ {\begin{array}{*{20}{c}} {{S_1} + S_1^{\rm T}}&{{G_3} + S_2^{\rm T}}\\ {G_3^{\rm T} + {S_2}}&{G_3^{\rm T} + {G_3}} \end{array}} \right]\\ {\Psi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} \Psi _{s1}&\Psi _{s2} \end{array}} \right]\\ \Psi _{s1} = \, & \left[\begin{array}{cc} {{S_1}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_1}{B_{u1}}{\hat C_c}}\\ {{S_2}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_2}{B_{u1}}{\hat C_c}}\\ \end{array}\right]\\ \Psi _{s2} = \, & \left[\begin{array}{cc} {{S_1}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_1}{B_{u2}}{\hat C_c}}\\ {{S_2}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_2}{B_{u2}}{\hat C_c}}\\ \end{array}\right] \nonumber\\ {\Psi _{22}} = \, & {\rm diag}\{ { - {{ P}_{s1}}, - {{ P}_{s2}}} \}\end{aligned} \end{equation*} $$ 证明. 由引理4及引理1易证.
4. 解决方案
4.1 算法
上述定理中得到的矩阵不等式为非凸的, 为了解决该难题, 采取两步算法进行求解:
步骤1. 设计状态反馈控制器, 使闭环系统(32)满足控制性能指标(10)和(12), 得到控制器参数$ {\hat C_c} $.
设计如下形式的状态反馈控制器:
$$ \begin{equation} \pmb u(i, j) = {\hat C_c}\pmb x(i, j) \end{equation} $$ (31) 可得闭环系统:
$$ \begin{align} \pmb x(i + 1, j + 1) = \, &({A_1} + {B_{u1}}{{\hat C}_c})\pmb x(i, j + 1) +\\ & ({A_2} + {B_{u2}}{{\hat C}_c})\pmb x(i + 1, j)+\\ & {B_{d1}}\pmb d(i, j + 1) + {B_{d2}}\pmb d(i + 1, j)+\\ & {B_{f1}}\pmb f(i, j + 1) + {B_{f2}}\pmb f(i + 1, j)\\ \pmb z(i, j) = \, &(E + {F_u}{{\hat C}_c})\pmb x(i, j)+{F_f}\pmb f(i , j) \end{align} $$ (32) 定义矩阵
$$ \begin{equation*} \begin{aligned} \hat A = \, & \left[ {\begin{array}{*{20}{c}} {{A_1} + {B_{u1}}{{\hat C}_c}}&{{A_2} + {B_{u2}}{{\hat C}_c}} \end{array}} \right] = \left[ {{\hat A_{1}}, {\hat A_{2}}} \right]\\ F_f = \, &0, \hat F_f = \left[ {\begin{array}{*{20}{c}} {F_f}&0\\ 0&{F_f} \end{array}} \right] \\\hat E = \, & \left[ {\begin{array}{*{20}{c}} {E + {F_u}{{\hat C}_c}}&0\\ 0&{E + {F_u}{{\hat C}_c}} \end{array}} \right], {\hat B_f} = \left[ {{B_{f1}}, {B_{f2}}} \right]\end{aligned} \end{equation*} $$ 定理 6. 给定标量$ {\beta _1} > 0 $, $ {\bar \omega _{11}}, {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\bar P_1} $, $ {\bar P_2} $及$ {\bar Q_1}>0 $, $ {\bar Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(31)成立, 则系统(32) $满足性能指标(10).此外, 若式(31)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Phi _{11}}}&{{\Phi _{12}}}&{{\Phi _{13}}}&{{\Phi _{14}}}&{{\Phi _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Phi _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Phi _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi _{34}}}&{{\Phi _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Phi _{44}}}&{{\Phi _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Phi _{55}}}&{{\Phi _{56}}}&{{\Phi _{57}}}\\ *&*&*&*&*&{{\Phi _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Phi _{77}}} \end{array}} \right] < 0 \end{equation} $$ (33) 其中
$$ \begin{align*} {\Phi _{11}} = \, & {\bar P_1} + {\bar P_2}- {X} - X^{\rm T} , {\Phi _{12}} = {\bar Q_1}\\ {\Phi _{13}} = \, & - V_{1}^{\rm T}, {\Phi _{14}} = 0\\ {\Phi _{15}} = \, & {({A_1}{X} +{B_{f1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\bar {Q_2}} \\ {\Phi _{16}} = \, &{({EX + {F_u}Y})^{\rm T}}, \Phi_{17} = 0, \\ {\Phi _{22}} = \, & -\bar P_1-2\cos{\bar \omega_{11}} \bar Q_1-X-X^{\rm T}\\ \Phi_{23} = \, &0, {\Phi _{24}} = - V_{5}^{\rm T}\\ {\Phi _{25}} = \, & {({A_2}{X} + {B_{f2}}{V_5} +{B_{u2}}{Y})^{\rm T}}, \Phi_{26} = 0\\ {\Phi _{27}} = \, & {({EX + {F_u}Y})^{\rm T}}, {\Phi _{33}} = I- {V_{2}} - {V_{2}}^{\rm T} \end{align*} $$ $$ \begin{align*} \Phi_{34} = \, &0, {\Phi _{35}} = -{V_{3}} + (B_{f1}V_2)^{\rm T}, \Phi_{36} = 0 \\ {\Phi _{37}} = \, & - {V_{4}}, {\Phi _{44}} = I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Phi _{45}} = \, &{({B_{f2}}{V_{6}})^{\rm T}}, {\Phi _{46}} = - {V_{7}} , \Phi_{47} = 0\\ {\Phi _{55}} = \, &-\bar{P_2}-2\cos\bar{\omega}_{12}\bar{Q}_2+B_{f1}V_3+(B_{f1}V_3)^{\rm T}\\ {\Phi _{56}} = \, & {B_{f2}}{V_{7}}, {\Phi _{57}} = {B_{f1}}{V_{4}}, {\Phi _{66}} = - \beta _1^2I\\ \Phi_{67} = \, &0, {\Phi _{77}} = - \beta _1^2I \end{align*} $$ 证明. 根据广义KYP引理的对偶形式, 若下式
$$ \begin{align} &\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]^{\rm T}+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]^{\rm T}<0 \end{align} $$ (34) 成立, 则系统(32)满足性能指标(10).式(34)可写为
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}{\left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right]^{\rm T}} < 0 \end{equation} $$ (35) 其中
$$ \begin{equation*} \begin{aligned} K = \, &\left[{\begin{array}{*{20}{c}} I&0&0&0&0&0&0\\ 0&I&0&0&0&0&0\\ 0&0&0&I&0&0&0\\ 0&0&0&0&I&0&0\\ 0&0&I&0&0&0&0\\ 0&0&0&0&0&I&0\\ 0&0&0&0&0&0&I \end{array}} \right]\\ \Sigma_1 = \, &\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right], \Pi_1 = \left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\\ S = \, &\left[ {\begin{array}{*{20}{c}} {\hat A}&{{{\hat B}_f}}\\ {\hat E}&{0} \end{array}} \right] = \\ \, & \left[ {\begin{array}{*{20}{c}} {A_1}&{A_{2}}&{B_{f1}}&{B_f}\\E&0&0&0\\0&E&0&0 \end{array}} \right]+\\ &\left[ {\begin{array}{*{20}{c}} {B_{u1}}&{B_{u2}}\\{F_{u}}&{0}\\0&{F_u} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} {\hat C_c}&{0}\\{0}&{\hat C_c} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] = \\ \, &\mathscr{A}+\mathscr{B}L\mathscr{C}\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {X_1} = {\{{\mathscr{C}}^\dagger XR+(I-{\mathscr{C}^ \dagger}\mathscr{C})V\} } , \quad Y = {\hat C_c}X \end{aligned} \end{equation*} $$ 则
$$ \begin{equation*} \begin{aligned} SX_1 = \mathscr{A}X_1+\mathscr{B}YR \end{aligned} \end{equation*} $$ 由于$ \mathscr{C} = \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] $, 故$ \mathscr{C}^\dagger = \left[ {\begin{array}{*{20}{c}} I&0\\0&I\\0&0\\0&0 \end{array}} \right] $, 因此可得
$$ \begin{equation*} \begin{aligned} {X_1} = \, &\left[ {\begin{array}{*{20}{c}} {XR_1}\\ {XR_2} \\{ V_a}\\{ V_b} \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {P_1} = K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}, H_1 = \begin{bmatrix} -I\\S \end{bmatrix}, $ $ H_1^ \bot = \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] $, 式(35)可改写为
$$ \begin{equation*} {P_1} + He({H_1}{X_1}) < 0 \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {R_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0&0&0&0&0&0 \end{array}} \right]\\ {R_2} = \, &\left[ {\begin{array}{*{20}{c}} 0&I&0&0&0&0&0 \end{array}} \right]\\ V_a = \, &\begin{bmatrix} V_1&0&V_2&0&V_3&0&V_4 \end{bmatrix}\\ V_b = \, &\begin{bmatrix} 0&V_5&0&V_6&0&V_7&0 \end{bmatrix} \end{aligned} \end{equation*} $$ 代入可得式(33).此外, 若式(33)成立, 易知$ X $可逆, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
定理 7. 给定标量$ {\beta _2} > 0 $, $ {\bar \omega _{21}}, {\bar \omega _{22}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\tilde P_1} $, $ {\tilde P_2} $及$ {\tilde Q_1}>0 $, $ {\tilde Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(36)成立, 则系统(32) $满足性能指标(12).此外, 若式(36)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Sigma _{11}}}&{{\Sigma _{12}}}&{{\Phi _{13}}}&{{\Sigma _{14}}}&{{\Sigma _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Sigma _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Sigma _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi_{34}}}&{{\Sigma _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Sigma _{44}}}&{{\Sigma _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Sigma _{55}}}&{{\Sigma _{56}}}&{{\Sigma _{57}}}\\ *&*&*&*&*&{{\Sigma _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Sigma _{77}}} \end{array}} \right] < 0 \end{equation} $$ (36) 其中
$$ \begin{equation*} \begin{aligned} {\Sigma _{11}} = \, & {\tilde P_1} + {\tilde P_2}- {X} - X^{\rm T} , {\Sigma _{12}} = {\tilde Q_1}\\ {\Sigma _{14}} = \, &0 \\ {\Sigma _{15}} = \, & {({A_1}{X} +{B_{d1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\tilde {Q_2}}\\ {\Sigma _{22}} = \, & -{\tilde P_1} -2\cos {\bar \omega _{21}}{\tilde Q_1}- {X} - X^{\rm T} \\ {\Sigma _{25}} = \, & {({A_2}{X} + {B_{d2}}{V_5} +{B_{u2}}{Y})^{\rm T}}\\ {\Sigma _{35}} = \, & -{V_{3}} + ({B_{d1}}{V_2})^{\rm T}\\ {\Sigma _{44}} = \, & I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Sigma _{45}} = \, &{({B_{d2}}{V_{6}})^{\rm T}} \\ {\Sigma _{55}} = \, &-\tilde{P_2}-2\cos\bar{\omega}_{22}\tilde{Q}_2+B_{d1}V_3+(B_{d1}V_3)^{\rm T} \\ {\Sigma _{56}} = \, & {B_{d2}}{V_{7}}, {\Sigma _{57}} = {B_{d1}}{V_{4}}, {\Sigma _{66}} = - \beta _2^2I, {\Sigma _{77}} = - \beta _2^2I \end{aligned} \end{equation*} $$ 证明. 参考定理6证明过程.
通过求解以下优化问题获得控制器参数$ {\hat C_c} $:
$$ \begin{equation*} \begin{aligned} &\min a{\beta _1} + b{\beta _2}\\ &{\rm s.t.}\;\;(33), (36) \end{aligned} \end{equation*} $$ (37) 给定实参数$ a $, $ b $, 若上述优化问题可解, 则控制器参数$ {\hat C_c} = YX^{-1} $.
步骤2. 在步骤1的基础上($ {\hat C_c} $已知), 给定实参数$ {a_1} $, $ {a_2} $, $ {b_1} $, $ {b_2} $, 求解如下的优化问题:
$$ \begin{equation*} \begin{aligned} & \min {a_2}{\gamma _2} + {b_1}{\beta _1} + {b_2}{\beta _2} - {a_1}{\gamma _1}\\ &{\rm s.t.}\;(18), (19), (20), (25), (28), (29), (30) \end{aligned} \end{equation*} $$ 若上述优化问题可解, 则可得滤波器参数$ \hat A_k = G_3^{-1}\tilde A_k, \hat B_k = G_3^{-1}\tilde B_k, k = 1, 2, {\hat C_0} = {\hat C_0} $.
注5. 与一维系统相比, 二维系统的稳定性条件和性能条件复杂, 其故障检测滤波器/控制器的设计过程更加困难.求解有限频$ {H_ - } $指标时, 一维系统可通过Finsler定理等避免出现非凸问题, 而二维系统由于其广义KYP引理的特殊形式, 需要通过构造切平面方法来解决设计过程中出现的非凸问题.二维系统的状态反馈控制器设计难度也更大, 需利用广义KYP引理的对偶形式进行构造性证明.
4.2 残差评价函数及阈值
受参考文献[29]启发, 选择如下残差评价函数及阈值:
$$ \begin{equation} \begin{aligned} {J_r}(i, j)& = \sqrt{\frac{{\sum\limits_{p = 0}^s {\sum\limits_{q = 0}^t {{r^{\rm T}}}(i-p, j-q)r(i-p, j-q)}}}{{(s+1)(t+1)}}}\\ {J_{th}}& = \mathop{\sup}\limits_{f = 0, d \ne 0} {J_r}(i, j) \end{aligned} \end{equation} $$ (38) 其中, $ {J_r}(i, j) $和$ {J_{th}} $分别表示残差函数及阈值.阈值$ {J_{th}} $可借鉴文献[30]中的算法求出.根据如下的逻辑关系检测系统是否发生了故障:
$$ \begin{array}{l} J\left( {i,j} \right) > {J_{th}} \Rightarrow 系统存在故障 \Rightarrow 报警\\ J\left( {i,j} \right) < {J_{th}} \Rightarrow 系统无故障 \Rightarrow 不报警 \end{array} $$ 注6. 对于二维系统而言, 残差评价函数需要从水平和垂直两个方向定义以反映二维特性.本文选择水平方向$ i-s $到$ i $, 垂直方向$ j-t $$到$ j $的矩形区域内残差的平均值作为评价函数.而对于一维系统, 残差评价函数只需要在一个方向上定义, 其评估窗口通常为$ k_0 $到$ k_0+n $的时间范围.
5. 仿真例子
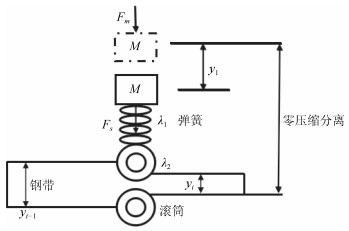
该轧制过程可用如下等式描述:
$$ \begin{equation*} \begin{aligned} \pmb y_{i}(t) = {\frac{\lambda}{\lambda +Mp^2}}\left\{\left(1+\frac{Mp^2}{\lambda_1}\right)\pmb y_{i-1}(t)-{\frac{1}{\lambda_2}}\pmb F_m\right\} \end{aligned} \end{equation*} $$ 其中, $ p $表示微分算子$ {\rm d}/{\rm d}t $, $ \pmb y_i(t) $是第$ i $个实际压辊间隙厚度, $ \pmb F_m $是由电动机产生的力, $ M $是压辊间隙调节机构的总质量, $ \lambda_1 $表示调节机构弹簧, $ \lambda_2 $表示带钢的硬度, $ \lambda = \lambda_1\lambda_2/(\lambda_1+\lambda_2) $是带钢和压辊机构的复合刚度.通过向后差分并用$ T_1 $表示采样周期, 则上式可以用离散时间形式表示:
$$ \begin{equation*} \begin{aligned} \pmb y_i(t+T_1) = \, & c_1\pmb y_i(t)+c_2\pmb y_i(t-T_1)+c_3\pmb y_{i-1}(t+T_1)+\\ & c_4\pmb y_{i-1}(t)+c_5\pmb y_{i-1}(t-T_1)+b \pmb u_{i}(t)\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} c_1 = \, &\frac{2M}{\lambda {T_1}^2+M}, \; c_2 = \frac{-M}{\lambda {T_1}^2+M}\\ c_3 = \, & \frac{\lambda}{\lambda {T_1}^2+M}\left({T_1}^2+\frac{M}{\lambda }\right)\\ c_4 = \, & -\frac{2\lambda M}{\lambda_1(\lambda{T_1}^2+M)}, \; c_5 = \frac{\lambda M}{\lambda_1(\lambda{T_1}^2+M)}\\ b = \, & -\frac{\lambda {T_1}^2}{\lambda_2(\lambda{T_1}^2+M)}\\ \pmb x(i, j): = \, &[\pmb y_{i-1}^{\rm T}((j+1)T_1)\quad \pmb y_{i-1}^{\rm T}(jT_1)\quad \pmb y_{i}^{\rm T}(jT_1)\\ &\pmb y_{i}^{\rm T}((j-1)T_1)\quad \pmb y_{i-1}^{\rm T}((j-1)T_1)]^{\rm T}\\ \pmb u(i, j): = \, &\pmb F_m, \; \pmb y(i, j): = \pmb y_i(jT_1) \end{aligned} \end{equation*} $$ 上述等式可转化为FM模型:
$$ \begin{equation*} \begin{split} {\pmb x}({ i} + 1, { j} + 1) = \, &A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j})+\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j})+\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j})\\ \pmb y({ i}, { j}) = \, & C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j})\\ \pmb z({ i}, { j}) = \, & E{\pmb x}({ i}, { j}) + F_{ u} {\pmb u}({ i}, { j}) \end{split} \end{equation*} $$ 其中
$$ \begin{align*} {A_1}& = \left[ {\begin{array}{*{20}{c}} {c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\ 0&0&1&0&0\\0&0&0&0&0\\0&0&0&0&0\\0&0&0&0&0 \end{array}} \right]\\{A_2}& = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0\\0&0&0&0&0\\{c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\0&0&1&0&0\\0&1&0&0&0 \end{array}} \right]\\ {B_{d1}}& = \left[ {\begin{array}{*{20}{c}} 0.0605\\0.3993\\0.5269\\0.4168\\0.6569 \end{array}} \right], {B_{d2}} = \left[ {\begin{array}{*{20}{c}} 0.6280\\0.2920\\0.4317\\0.0155\\0.9841 \end{array}} \right] \end{align*} $$ $$ \begin{align*} {B_{u1}}& = \left[ {\begin{array}{*{20}{c}} b\\0\\0\\0\\0 \end{array}} \right], {B_{u2}} = \left[ {\begin{array}{*{20}{c}} 0\\0\\b\\0\\0 \end{array}} \right]\\ B_{f1}& = \begin{bmatrix} -1.0414&0&0&0&0 \end{bmatrix}^{\rm T}\\B_{f2}& = \begin{bmatrix} 0&0&-1.0414&0&0 \end{bmatrix}^{\rm T}\\ C& = \begin{bmatrix} 0&0&0&0&0 \end{bmatrix}\\ E& = \left[ {\begin{array}{*{20}{c}} 0&0&{1}&0&0 \end{array}} \right]\\ F_u& = 0.1672, D_f = 1.2, D_d = 0.5 \end{align*} $$ 令$ \lambda_1 = \lambda_2 = 1\, 800, T_1 = 0.8, M = 100 $, 假设上述系统中发生了卡死型传感器故障.利用本文所提出的方法设计故障检测滤波器/控制器, 同时保证一定的故障检测性能和控制性能.给定加权值$ {a_1} = 0.1 $, $ {a_2} = 0.4 $, $ {b_1} = 0.4 $, $ {b_2} = 0.1 $, 由于故障发生在低频段, 取频率约束$ {\bar \omega _{k1}} = {\bar \omega _{k2}} = \pi /12, k = 1, 2 $, 其余参数取为$ T = \left[ {\begin{array}{*{20}{c}} 0.8147&0.9058&0.1270&0.9134&0.6324 \end{array}} \right]^{\rm T} $, $ \alpha = 1.6537 $.根据上节所提出的算法, 可得如下故障检测滤波器/控制器参数:
$$ \begin{equation*} \begin{aligned} {\hat A_1} = \, & \left[ {\begin{array}{*{20}{c}} -0.0673&-0.0120&0.0238&-0.0189&0.0103\\ -0.0064&-0.1977&0.0372&0.0114&0.0109\\ 0.0065&0.0130&-0.1643&0.0184&0.0082\\ -0.0037&0.0061&0.0135&-0.1931&0.0030\\ -0.0196&0.0166&0.0128&0.0091&-0.1854\\ \end{array}} \right]\\ {\hat A_2} = \, & \left[ {\begin{array}{*{20}{c}} -0.1618&0&0.0071&-0.0030&0.0026\\ 0.0097&-0.1998&0.0160&0.0041&0.0088\\ 0.0601&0.0040&-0.1529 & 0 & 0.0137\\ 0.0099&0.0047&0.0384&-0.2012&0.0050\\ -0.0148&0.0316&0.0103&0.0077&-0.1892 \end{array}} \right]\\ {\hat B_1} = \, & \left[ {\begin{array}{*{20}{c}} 0.3024\\ -0.0514\\ 0.0357\\ -0.0827\\ -0.0437 \end{array}} \right], {\hat B_2} = \left[ {\begin{array}{*{20}{c}} -0.1311\\ 0.0634\\ 0.2529\\ 0.0884\\ -0.0510 \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} \begin{aligned} {\hat C_c} = \, & \left[ {\begin{array}{*{20}{c}} 556.2519&-81.8249&86.8303&-88.8581&44.4291 \end{array}} \right]\\ {\hat C_0} = \, &\left[ {\begin{array}{*{20}{c}} 1.0215&1.1350&0.1381&1.1477&0.7935 \end{array}} \right] \end{aligned} \end{equation*} $$ 为了验证该故障检测滤波器/控制器的有效性, 给出仿真结果(图 1~4).在仿真中, 考虑卡死型故障
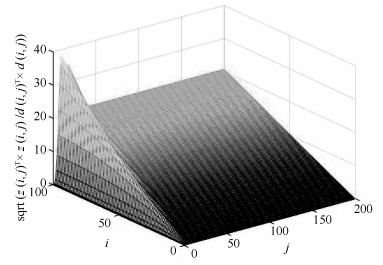
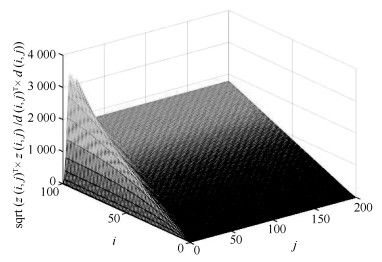
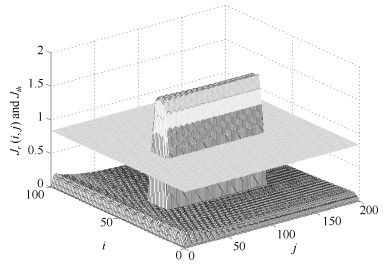 图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space
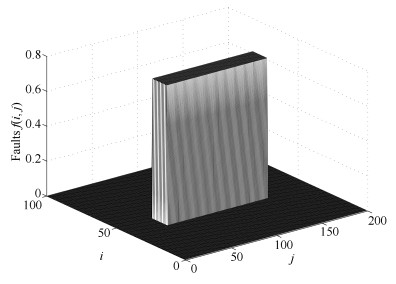
图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space$$ \begin{equation*} \pmb f(i, j) = \begin{cases} 0.8, &40 \le i \le 50, 40 \le j \le 150\\ 0, & \mbox{否则} \end{cases} \end{equation*} $$ 以及干扰
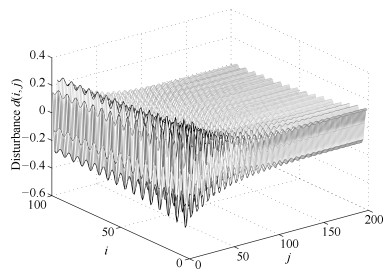
$$ \begin{equation*} \pmb d(i, j) = 0.15{\sin}(i){\rm e}^{-0.02i}+0.3{\cos}(j){\rm e}^{-0.03j} \end{equation*} $$ 系统初始状态设为$ {{\pmb x}_i}(k, 1) = 0 $, $ {\hat {\pmb x}_i}(k, 1) = 0 $, $ {\pmb x_i}(1, k) = 0 $, $ {\hat {\pmb x}_i}(1, k) = 0 $.采用参考文献[30]中的算法, 可得阈值$ {J_{th}} = 0.8251 $. 图 2表示系统的故障, 图 3表示系统干扰, 图 4和图 5分别给出了三维空间和二维空间的故障检测效果.从图 5可以看出, 当$ i = 15, 23, 35 $时, 残差评价函数的值位于阈值的下方, 表明系统没有发生故障; 当$ i = 44 $, $ 40 \le j\le150 $时, 残差评价函数的值位于阈值的上方, 表明此时系统发生了故障, 这与预设的故障一致, 因此该设计可以有效地检测出故障发生.
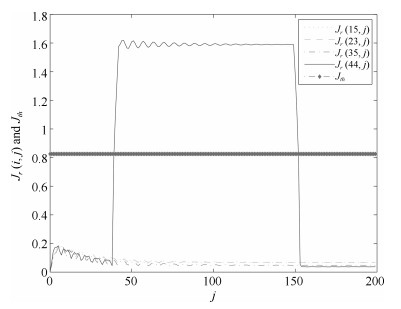 图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space
图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space接下来与传统的分步设计方法[15]进行比较, 仍采用上文中的轧制模型中的数据, 先设计控制器, 再设计故障检测滤波器.在相同条件下进行仿真研究, 仿真结果如图 6~8所示. 图 6为故障到残差传递函数的奇异值比较, 可以看出集成设计方法的故障灵敏性更高(奇异值更大). 图 7和图 8为两种方法的控制性能(即扰动抑制性能)的比较, 可以看出当故障发生时, 本文所提出的集成设计方法具有更好的扰动抑制能力.
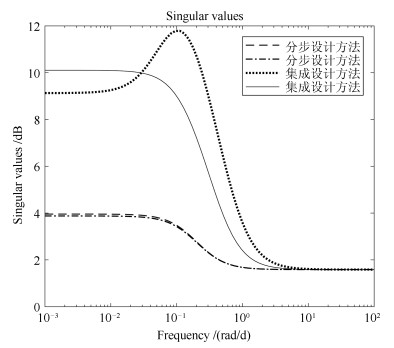 图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal
图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal6. 结论
本文研究了FM模型的同时故障检测与控制问题.借助于二维广义KYP引理, 直接处理系统需要满足的有限频性能指标, 可避免频率加权方法的复杂性.所设计的故障检测滤波器/控制器, 在检测故障发生的同时, 还可以满足给定的控制性能指标.利用构造切平面方法以及两步法来解决设计过程中出现的非凸问题.仿真例子验证了方法的有效性.
-
表 1 模型参数的估计(混合滤波方法)
Table 1 Parameters and their estimates (Hybrid filter)
$k$ $\bar{d}$ $\bar{d}a$ $\bar{d}b$ $\bar{d}c$ $\delta\ ({\text{%}})$ 5 0.00920012 0.00491263 0.00003991 0.00000098 0.33063 8 0.00920015 0.00492316 0.00003992 0.00000098 0.37553 10 0.00920314 0.00494321 0.00003991 0.00000097 0.59953 20 0.00920287 0.00494295 0.00003987 0.00000097 0.58897 30 0.00919972 0.00483822 0.00003846 0.00000099 0.74688 真值 0.00920000 0.00490000 0.00004000 0.00000100  下载: 导出CSV
下载: 导出CSV
表 2 模型参数的估计(拓展的卡尔曼滤波方法)
Table 2 Parameters and their estimates (Extended Kalman filter)
$k$ $\bar{d}$ $\bar{d}a$ $\bar{d}b$ $\bar{d}c$ $\delta ({\text{%}})$ 5 0.00921632 0.00548236 0.00003124 0.00000086 5.52150 8 0.00921594 0.00544469 0.00003262 0.00000089 5.19838 10 0.00921621 0.00545321 0.00003173 0.00000091 5.22873 20 0.00921845 0.00546151 0.00003292 0.00000091 5.39818 30 0.00921706 0.00545076 0.00003189 0.00000091 5.31865 真值 0.00920000 0.00490000 0.00004000 0.00000100
下载: 导出CSV
表 3 模型参数的估计(粒子滤波方法)
Table 3 Parameters and their estimates (Particle filter)
$k$ $\bar{d}$ $\bar{d}a$ $\bar{d}b$ $\bar{d}c$ $\delta\ ({\text{%}})$ 5 0.00917652 0.00502136 0.00003865 0.00000096 1.14182 8 0.00919138 0.00498754 0.00003973 0.00000098 0.82781 10 0.00919141 0.00498763 0.00004016 0.00000098 0.85850 20 0.00919136 0.00501627 0.00004098 0.00000096 1.02914 30 0.00919139 0.00490032 0.00004074 0.00000097 0.94999 真值 0.00920000 0.00490000 0.00004000 0.00000100
下载: 导出CSV
-
[1] 衷路生, 颜真, 杨辉, 齐叶鹏, 张坤鹏, 樊晓平. 数据驱动的高速列车子空间预测控制方法. 铁道学报, 2013, 35(4): 77−83 doi: 10.3969/j.issn.1001-8360.2013.04.0121 Zhong Lu-Sheng, Yan Zhen, Yang Hui, Zhang Kun-Peng, Fan Xiao-Ping. Predictive control of high-speed train based on data driven subspace approach. Journal of the China Railway Society, 2013, 35(4): 77−83 doi: 10.3969/j.issn.1001-8360.2013.04.012 [2] 2 Dong H R, lin X, Yao X M, Bai W Q, Ning B. Composite disturbance-observer-based control and H∞ control for high speed trains with actuator faults. Asian Journal of Control, 2018, 20(2): 735−745 doi: 10.1002/asjc.1590 [3] 王呈, 唐涛, 罗仁士. 基于UIO方法的列车自动驾驶信号故障检测研究. 铁道学报, 2013, 35(6): 48−52 doi: 10.3969/j.issn.1001-8360.2013.06.0083 Wang Cheng, Tang Tao, Luo Ren-Shi. ATO fault detection based on UIO method. Journal of the China Railway Society, 2013, 35(6): 48−52 doi: 10.3969/j.issn.1001-8360.2013.06.008 [4] 4 Zhuan X, Xia X. Cruise control scheduling of heavy haul trains. IEEE Transactions on Control Systems Technology, 2006, 33(1): 757−766 [5] 5 Xia X, Zhang J. Modeling and control of heavy haul trains. Control Systems IEEE, 2011, 31(4): 18−31 doi: 10.1109/MCS.2011.941403 [6] 6 Chou M, Xia X, Kayser C. Modelling and model validation of heavy-haul trains equipped with electronically controlled pneumatic brake systems. Control Engineering Practice, 2007, 15(4): 501−509 doi: 10.1016/j.conengprac.2006.09.006 [7] 7 Chen D W, Gao C H. Soft computing methods applied to train station parking in urban rail transit. Applied Soft Computing, 2012, 12(2): 759−767 doi: 10.1016/j.asoc.2011.10.016 [8] 辛斌, 白永强, 陈杰. 基于偏差消除最小二乘估计和Durbin方法的两阶段ARMAX参数辨识. 自动化学报, 2012, 38(3): 491−4968 Xin Bin, Bai Yong-Qiang, Chen Jie. Two-stage ARMAX parameter identification based on bias-eliminated least squares estimation and Durbin′s method. Acta Automatica Sinica, 2012, 38(3): 491−496 [9] 9 Chen J, Jiang B. Modified stochastic gradient parameter estimation algorithms for a nonlinear two-variable difference system. International Journal of Control, Automation, and Systems, 2016, 14(6): 1493−1500 doi: 10.1007/s12555-015-0185-x [10] 10 Wang C, Li K C. Aitken-based stochastic gradient algorithm for ARX models with time delay. Circuits Systems and Signal Processing, 2019, 38(6): 2863−2876 doi: 10.1007/s00034-018-0998-y [11] 11 Li J H, Zheng W X, Gu J P, Hua L. Parameter estimation algorithms for Hammerstein output error systems using Levenberg-Marquardt optimization method with varying interval measurements. Journal of the Franklin Institute, 2017, 354(1): 316−331 doi: 10.1016/j.jfranklin.2016.10.002 [12] 12 Xia H F, Yang Y Q, Ding F, Alsaedi A, Hayat T. Maximum likelihood-based recursive least-squares estimation for multivariable systems using the data filtering technique. International Journal of Systems Science, 2019, 50(6): 1121−1135 doi: 10.1080/00207721.2019.1590664 [13] 13 Yang X Q, Yin S. Robust global identification and output estimation for LPV dual-rate systems subjected to random output time-delays. IEEE Transactions on Industrial Informatics, 2017, 13(6): 2876−2885 doi: 10.1109/TII.2017.2702754 [14] 14 Chen J, Huang B, Ding F, Gu Y. Variational Bayesian approach for ARX systems with missing observations and varying time-delays. Automatica, 2018, 94: 194−204 doi: 10.1016/j.automatica.2018.04.003 [15] 15 Xiong W L, Yang X Q, Ke L, Xu B G. EM algorithm-based identification of a class of nonlinear Wiener systems with missing output data. Nonlinear Dynamics, 2015, 80(1): 329−339 [16] 16 Zhao Y J, Fatehi A, Huang B. Robust estimation of ARX models with time-varying time delays using variational Bayesian approach. IEEE Transactions on Cybernetics, 2018, 48(2): 532−542 doi: 10.1109/TCYB.2016.2646059 [17] 衷路生, 李兵, 龚锦红, 张永贤, 祝振敏. 高速列车非线性模型的极大似然辨识. 自动化学报, 2014, 40(12): 2950−295817 Zhong Lu-Sheng, Li Bing, Gong Jin-Hong, Zhang Yong-Xian, Zhu Zhen-Min. Maximum likelihood identification of nonlinear models for high-speed train. Acta Automatica Sinica, 2014, 40(12): 2950−2958 [18] Simon D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches. John Wiley & Sons, Inc., New Jersey, 2006. [19] 19 Simon D, Shmaliy Y S. Unified forms for Kalman and finite impulse response filtering and smoothing. Automatica, 2013, 49(6): 1892−1899 doi: 10.1016/j.automatica.2013.02.026 [20] 20 Chen J, Li J, Liu Y J. Gradient iterative algorithm for dual-rate nonlinear systems based on a novel particle filter. Journal of the Franklin Institute, 2017, 354(11): 4425−4437 doi: 10.1016/j.jfranklin.2017.04.003 [21] 顾晓清, 倪彤光, 张聪, 戴臣超, 王洪元. 结构辨识和参数优化协同学习的概率TSK模糊系统. 自动化学报, 2019. DOI 10.16383/j.aas.c180298Gu Xiao-Qing, Ni Tong-Guang, Zhang Cong, Dai Chen-Chao, Wang Hong-Yuan. Probabilistic TSK fuzzy system in the simulataneous learning of structure identification and parameter optimization. Acta Automatica Sinica, 2019. DOI 10.16383/j.aas.c180298 期刊类型引用(1)
1. 崔鹏浩,李成,蒋忠中. 考虑零件库存的两机器装配线性能评估与库存控制. 计算机集成制造系统. 2024(01): 289-299 .  百度学术
百度学术其他类型引用(4)
-

 下载:
下载:








计量
- 文章访问数: 2590
- HTML全文浏览量: 446
- PDF下载量: 191
- 被引次数: 5
