

Adaptive Identification of Time-varying Environmental Parameters in Train Dynamics Model
-
摘要: 考虑列车制动性能与制动距离对列车安全的重要影响, 分析了列车运行的动力学特性, 构建了列车离散化制动模型,并针对影响列车制动性能的关键参数 — 钢轨粘着系数难以直接观测、随钢轨环境变化的特点, 提出基于滑动窗口与最大期望理论的轮轨粘着系数在线辨识算法. 首先, 依据数据特征确定滑动窗口位置与窗口尺寸; 然后, 构造列车动力学模型参数的条件数学期望, 并结合粒子滤波与粒子平滑算法以及贝叶斯理论, 估计预设模型参数下的列车运行状态; 在此基础上, 分析粘着系数的后验概率, 并极大化条件数学期望对模型参数预设进行优化更新, 进而实现模型真实参数的逐步逼近. 最后, 考虑雪地、隧道等场景下的粘着系数变化, 对本文方法进行了仿真验证, 并数值分析了粘着系数对制动距离的影响. 仿真结果表明本文算法可快速、准确地对粘着系数进行实时辨识, 掌握轮轨间实时粘着状态.Abstract: Considering the braking performance and distance on train safety, the dynamic characteristics of train are analyzed, and the discrete braking model is constructed. Aiming at the pivotal rail-wheel adhesion coefficient, which is difficult to be observed directly and varies with rail environment, an online identification of adhesion coefficient based on sliding window and expectation maximization is proposed. Firstly, the position and size of window are set up. Then, the conditional expectation about the parametric train dynamic model is constructed, and the train running state under the preset parameters is estimated by the particle filter, particle smoothing and Bayesian theory. On this basis, the posterior probability of the adhesion coefficient is analyzed, and the conditional expectation is maximized to optimize and update the model parameters, so that the real parameters can be approached step by step. Finally, considering the change of adhesion coefficient in snow, tunnel and other scenes, the method is simulated and validated, and the influence of adhesion coefficient on braking distance is analyzed numerically. The simulation results show that the adhesion coefficient can be identified quickly and accurately, and the real-time adhesion state can be grasped in real time.
-
Key words:
- Adhesion coefficient /
- braking model /
- expectation maximization /
- sliding window /
- parameter estimation
-
防滑刹车控制是飞机地面滑跑安全系统设计中的关键性难题之一, 随着现代飞机性能大幅度提升, 对刹车系统安全和刹车效率等提出了更严格的要求, 其性能品质与提供刹车力矩的动力源有着密不可分的关联. 但是基于传统液压的传统飞机刹车系统弊端日益凸显, 如较长的液压管道存在油液泄露危险, 机械结构体积大、维护成本高等[1]. 基于机电作动器(Electro mechanical actuator, EMA)[2]的全电刹车系统, 将减速齿轮、滚珠丝杠、无刷直流电机、电磁制动器和检测装置集成化, 具有安全系数高、可靠性强、体积小、质量轻、动态性能好、易维护、机内自检测等优势, 已经成为未来飞机刹车系统新的发展方向[3-5].
在整个刹车过程中受到多时变参数、垂直与纵向力矩耦合机理以及飞机动力学模型呈现高度非线性特征等因素的影响, 使得建立精确的飞机防滑刹车系统模型是十分困难的. 文献[6-7]中针对飞机防滑刹车动力学模型, 仅考虑了纵向力矩, 并假设前轮与主轮摩擦系数相同或直接忽略了前轮摩擦力. 然而, 飞机防滑刹车系统模型仍需要考虑纵向与垂直方向力矩耦合情况, 前轮始终自由滚动, 属于动摩擦系数, 主轮由EMA产生刹车力矩, 属于静摩擦系数, 两者本质上是不同的. 同时, 前轮承担约10 % ~ 15 %的垂直载荷, 其摩擦力不应忽视. 值得注意的是, 现有理论方法并未充分考虑EMA内部结构的数学模型与飞机刹车动力学模型之间的关系. 为克服上述局限性, 本文建立了一种更适合实际应用的综合飞机防滑刹车系统模型. 另一方面, 飞机防滑刹车系统性能容易受到跑道表面状况(干燥、潮湿或结冰等)、刹车动静盘摩擦面不均匀、空气阻力、全电刹车作动器内部结构等诸多干扰因素的影响, 对整个刹车控制设计与优化带来巨大挑战[8]. 近年来, 针对飞机防滑刹车系统的抗干扰控制设计研究取得了一系列进展, 例如: 文献[9]为了提高EMA中伺服控制效果, 采用自适应径向基函数(Radial basis function, RBF)神经网络对系统的复合外部干扰上界预估, 并将干扰估计值作为控制器补偿项, 很大程度上提高了刹车控制的鲁棒性. 文献[10-11]对EMA中减速齿轮变形、开关磁阻电机的非线性干扰分别采用了RBF神经网络和误差反向传播神经网络进行逼近, 预估的非线性函数曲线与实际干扰的误差较小. 基于神经网络干扰估计的方法需要事先在离线状态下训练模型, 但干扰具有复杂性、时变性, 难以获取精确数据作为训练集, 因此在线观测的效果欠佳. 文献[12]根据控制系统的响应, 归纳不同类型的扰动, 对刹车系统信号进行统计分析, 提取出对干扰最敏感的特征变量. 同时, 利用概率理论, 提出了基于数据预处理、连续隐马尔科夫分类器和贝叶斯滤波器的飞机防滑刹车干扰识别与观测模型. 该方法需要大量的实验数据支持. 但在实时刹车过程中对干扰的精确估计是非常困难的. 本文提出了基于模型改进的非线性干扰观测器方法, 无需大量数据且具有对高阶微分干扰的观测能力, 引入了控制器的干扰补偿部分, 起到干扰抑制的作用.
飞机防滑刹车系统主要采用滑移率控制方式, 通过控制滑移率, 使得主轮与地面之间的静摩擦系数保持最大值, 获得最大的刹车力矩. 在过去的几十年里, 一批学者和工程师提出的控制算法在飞机刹车领域得到了广泛的应用, 例如动态面控制[13]、自适应控制[14]、切换控制[15]、模糊逻辑控制[16]、模型预测控制[17]、滑模控制[18]、极值搜索控制[19]等. 考虑到飞机速度、加速度等变量无法准确测量, 文献[20]基于卡尔曼滤波器对飞机速度、地面−轮胎结合力进行估计, 利用RBF神经网络对气动扰动进行观测和补偿, 根据能量消耗估计制动盘摩擦系数的变化规律, 结合跑道辨识技术形成高效的防滑刹车控制策略. 文献[21]提出了一种将滑移率和减速率作为输入变量的比例−积分−微分控制方案, 能够稳定在任何最佳滑移率平衡点附近, 从实用性角度来说对硬件性能要求较低. 文献[22]采用反步动态面控制和非对称障碍李雅普诺夫函数相结合方法, 既能快速跟踪最佳滑移率, 又能保证输出约束的有界性和整个系统的稳定性. 文献[23]针对电静液作动器系统, 利用开关阀阵列元件的间断特性, 提出了基于相平面分析的多阀阵列控制策略. 文献[24]采用动态LuGre摩擦系数模型来表征结合力矩, 利用双状态观测器估计模型的不可测内部摩擦状态, 在线求解LuGre模型的伪稳态模型极值, 得到摩擦系数的最大值和相应的最佳滑移率. 上述工作对防滑刹车控制做出了较深入的研究, 但在提升防滑刹车控制性能方面, 以下几方面问题需要进一步考虑. 首先, 现有的飞机防滑刹车控制目标主要是跟踪一个恒定的滑移率信号. 但滑移率容易受到跑道状态、飞机速度等影响而具有时效性, 其最大值由最佳滑移率表示, 因此本文提出控制目标为跟踪时变的最佳滑移率信号. 其次, 传统控制方法难以跟踪变化的最优值, 尤其在低速段误差较大, 甚至出现打滑现象. 应用于刹车系统的滑模控制方法均为常规形式, 仍存在由滑动运动引起的抖振现象. 本文将递归结构的快速终端滑模控制器与改进的非线性干扰观测器结合, 以实时跟踪最佳滑移率, 达到飞机防滑刹车的目的, 有效抑制了抖振对刹车性能造成的影响.
针对不确定性干扰条件下的高阶非线性飞机防滑刹车系统, 提出了一种基于非线性干扰观测器的快速终端滑模控制方法, 以达到较好的动态跟踪控制性能, 在消除了滑模抖振的同时也满足了实时在线估计的要求并实现干扰抑制的目标. 与现有部分研究成果相比, 本文的主要贡献归纳为如下几个方面:
1)本文提出了一种更适合于实际应用的刹车系统综合建模方法, 充分考虑了作动器内部机械结构运动的数学模型、主轮−地面结合系数影响因子、前轮滚动摩擦力以及垂直与纵向力矩耦合机理, 并通过反馈线性化处理, 形成线性标准系统模型.
2)针对刹车过程中易受到不确定性干扰的影响, 提出了改进的非线性干扰观测器方法, 具有对高阶微分干扰的观测能力, 并在控制律设计中作为干扰补偿部分, 使得刹车控制的抗干扰能力加强, 鲁棒性得到提升.
3)深入分析了轮胎打滑的影响因素, 设计递归结构的快速终端滑模控制器并建立稳定性条件, 实现了飞机全电防滑刹车控制系统的有限时间快速收敛并显著提高了刹车效率.
1. 问题描述
飞机防滑刹车系统的动力学模型建模一般包括飞机机体动力学、单个主轮受刹动力学、静摩擦系数和机电作动器等部分. 各个子系统模型之间存在强关联耦合, 并表现出强非线性、强复杂性等特征. 根据防滑刹车的实际过程与客观事实, 做出如下合理假设:
1)将飞机机体与起落架视为理想刚体, 可简化成集中质量, 刹车过程质量恒定不变.
2)假设飞机保持沿着直线滑行方向, 没有横向力影响.
3)前轮自由滚动, 没有刹车力矩作用, 滚动摩擦系数恒定.
4)假设左右侧机轮垂直载荷一致, 安装主轮的刹车装置实时同步控制, 对主轮产生相同的制动效果.
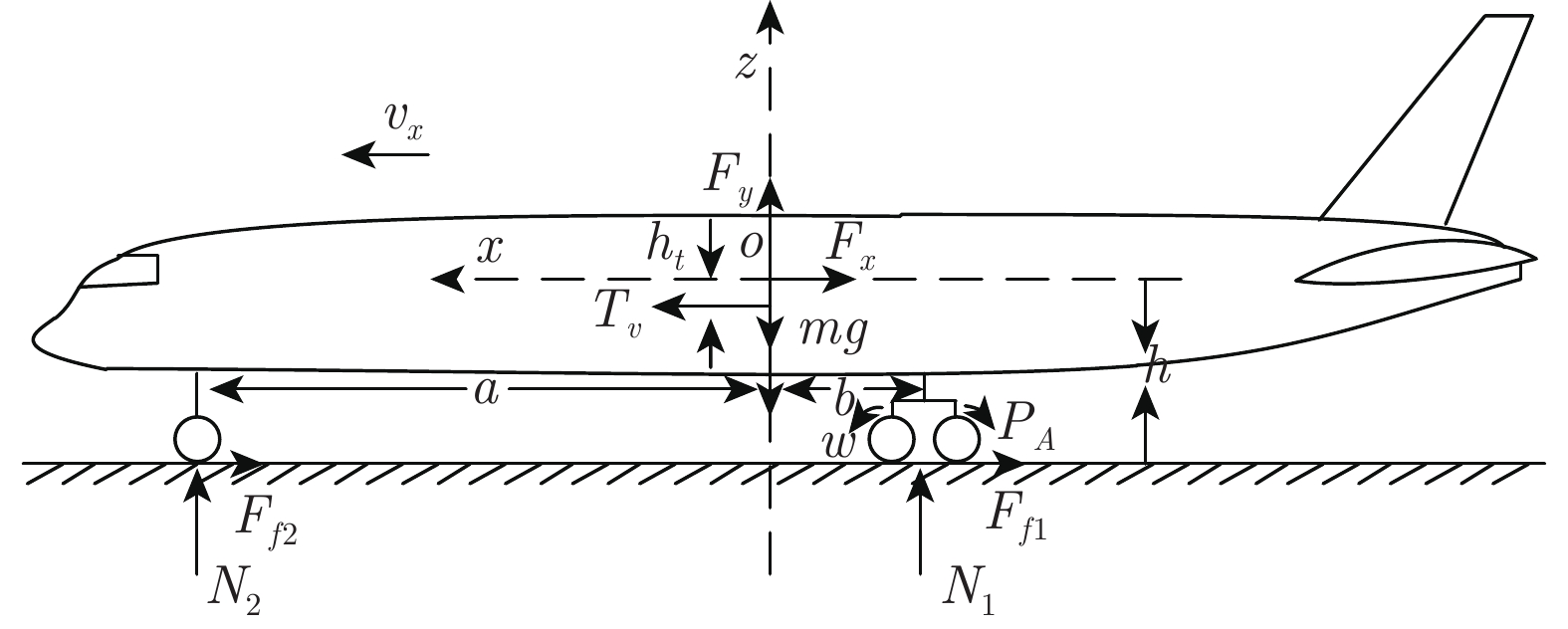
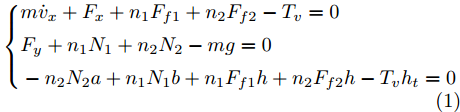
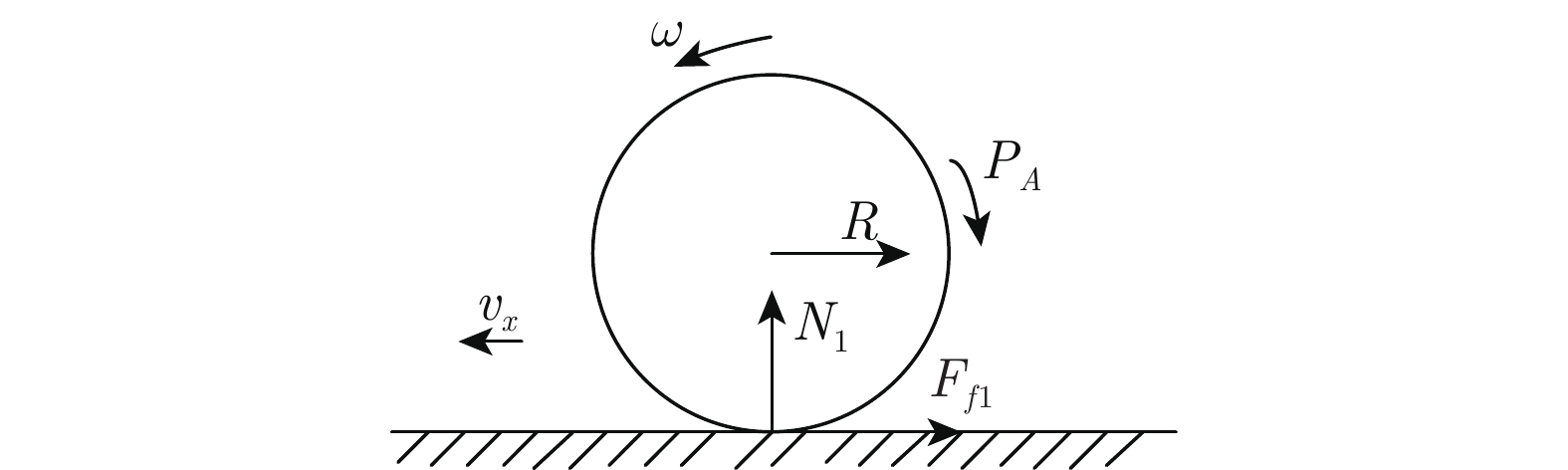
根据假设1)~3), 建立飞机机体受力图如图1所示, 图中具体参数描述见表1. 考虑空气动力特性影响, 飞机纵向运动方程、垂直方向平衡方程和质心力矩平衡方程分别为
表 1 飞机防滑刹车系统参数Table 1 Parameters of antiskid braking system参数 具体描述 $m$ 飞机质量 ${v_x}$ 飞机纵向滑跑速度 ${F_x}$ 迎风阻力 ${F_y}$ 飞机升力 ${F_{f1}}$ 单个主轮与地面间摩擦力 ${F_{f2}}$ 单个前轮与地面间摩擦力 ${n_1}$ 受刹主轮个数 ${n_2}$ 前轮个数 ${T_v}$ 发动机推力 ${N_1}$ 单个主轮垂直载荷 ${N_2}$ 单个前轮垂直载荷 $g$ 重力加速度 $a$ 前轮中心与飞机重心的水平距离 $b$ 主轮中心与飞机重心的水平距离 $h$ 飞机重心与地面的垂直高度 ${h_t}$ 发动机推力点与飞机重心的垂直高度 ${T_{{\rm{int}} }}$ 发动机剩余推力 ${k_x}$ 纵向空气阻力系数 ${k_y}$ 横向空气阻力系数 $\rho $ 空气密度 ${C_d}$ 飞机气动阻力系数 ${C_L}$ 飞机滑跑时的升力系数 ${S_w}$ 机翼总面积 $$\left\{ \begin{aligned} &m{{\dot v}_x} + {F_x} + {n_1}{F_{f1}} + {n_2}{F_{f2}} - {T_v}=0 \\ & {F_y} + {n_1}{N_1} + {n_2}{N_2} - mg=0 \\ & - {n_2}{N_2}a + {n_1}{N_1}b + {n_1}{F_{f1}}h + {n_2}{F_{f2}}h - {T_v}{h_t}=0 \end{aligned} \right.$$ (1) 其中,
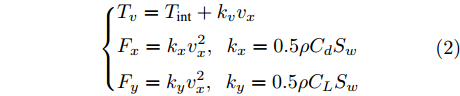
${T_v}$ 、${F_x}$ 、${F_y}$ 的表达式为$$\left\{ \begin{aligned} &{T_v}={T_{{\rm{int}} }} + {k_v}{v_x} \\ &{F_x}={k_x}v_x^2,\;\;{k_x}=0.5\rho {C_d}{S_w} \\ &{F_y}={k_y}v_x^2,\;\;{k_y}=0.5\rho {C_L}{S_w} \end{aligned} \right.$$ (2) 由假设4), 只需考虑单个主轮受刹情况, 主轮刹车的受力分析如图2所示, 其动力学方程为
$${J_w}\dot w={F_{f1}}R - {k_b}{P_A}$$ (3) 其中,
${J_w}$ 为主轮转动惯量,$w$ 为机轮角速度,$R$ 为主轮有效半径,${k_b}$ 为刹车力矩与压力转化系数,${P_A}$ 为作用在刹车盘上的压力.在飞机滑跑阶段, 机轮受到刹车力矩的作用, 使得飞机速度与机轮速度始终保持
${v_x} > Rw$ 关系, 由此定义滑移率$\lambda $ , 表示机轮相对跑道的滑动运动比率$$\lambda =\frac{{{v_x} - Rw}}{{{v_x}}}$$ (4) 可知滑移率的范围为:
$\lambda \in \left[ {\left. {0,1} \right)} \right.$ . 飞机刹车依赖于主轮与地面间结合力${F_{f1}}$ , 影响${F_{f1}}$ 大小的因素称为结合系数$\mu \left( {\lambda ,{v_x}} \right)$ , 定义为$$\mu \left( {\lambda ,{v_x}} \right)=\frac{{{F_{f1}}}}{{{N_1}}}$$ (5) 根据假设(3), 设定
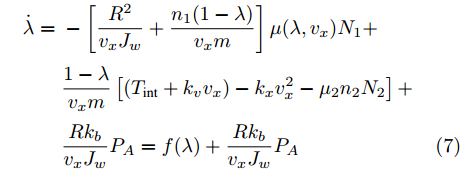
${\mu _2}$ 为恒定的前轮滚动摩擦系数, 因此单个前轮摩擦力为${F_{f2}}\;{\rm{=}}\;{\mu _2}{N_2}$ . 对式(4)求导可得$$\dot \lambda =\frac{{\left( {1 - \lambda } \right){{\dot v}_x} - R\dot w}}{{{v_x}}}$$ (6) 联立式(1) ~ (3)、式(5), 计算
${\dot v_x}$ 和$\dot w$ , 将式(6)改写为$$\begin{split} \dot \lambda =\;& - \left[ {\frac{{{R^2}}}{{{v_x}{J_w}}} + \frac{{{n_1}(1 - \lambda )}}{{{v_x}m}}} \right]\mu (\lambda ,{v_x}){N_1} +\\ & \frac{{1 - \lambda }}{{{v_x}m}}\left[ {({T_{{\rm{int}} }} + {k_v}{v_x}) - {k_x}v_x^2 - {\mu _2}{n_2}{N_2}} \right] + \\ &\frac{{R{k_b}}}{{{v_x}{J_w}}}{P_A} =f(\lambda ) + \frac{{R{k_b}}}{{{v_x}{J_w}}}{P_A}\end{split} $$ (7) 根据文献[25]提出的摩擦系数模型, 静摩擦系数方程为
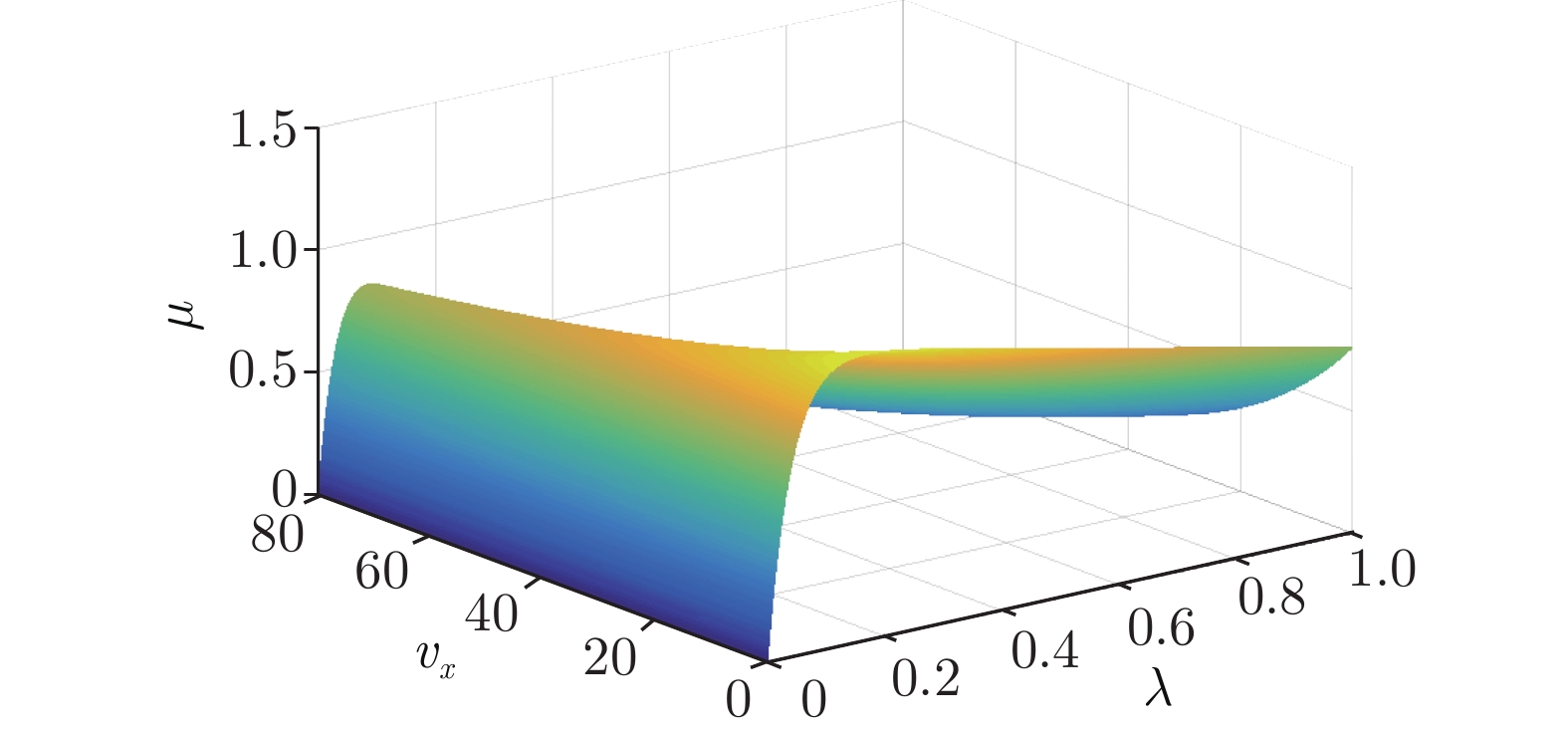
$$\mu \left( {\lambda ,{v_x}} \right)=\left[ {{c_1}\left( {1 - {{\rm{e}}^{ - {c_2}\lambda }}} \right) - {c_3}\lambda } \right]{{\rm{e}}^{ - {c_4}\lambda {v_x}}}$$ (8) 其中,
${c_i}\left( {i=1,2,3,4} \right)$ 为与实时跑道状态、飞机速度等因素有关的系数. 通过改变这些参数, 可以建立不同的地面接触摩擦系数模型. 表2列出几种不同跑道状态下的具体参数, 图3为干沥青跑道状态下静摩擦系数模型曲线, 图4为在飞机速度${v_x}$ = 30 m/s条件下不同跑道状态$\mu$ -$ \lambda $ 曲线.表 2 摩擦系数模型参数Table 2 Parameters of friction coefficient model跑道状态 ${c_1}$ ${c_2}$ ${c_3}$ ${c_4}$ 干沥青 1.2801 23.99 0.52 0.04 干混凝土 1.1973 25.168 0.5373 0.04 湿沥青 0.857 33.822 0.347 0.04 雪 0.1946 94.129 0.0646 0.04 冰 0.05 306.39 0 0.04 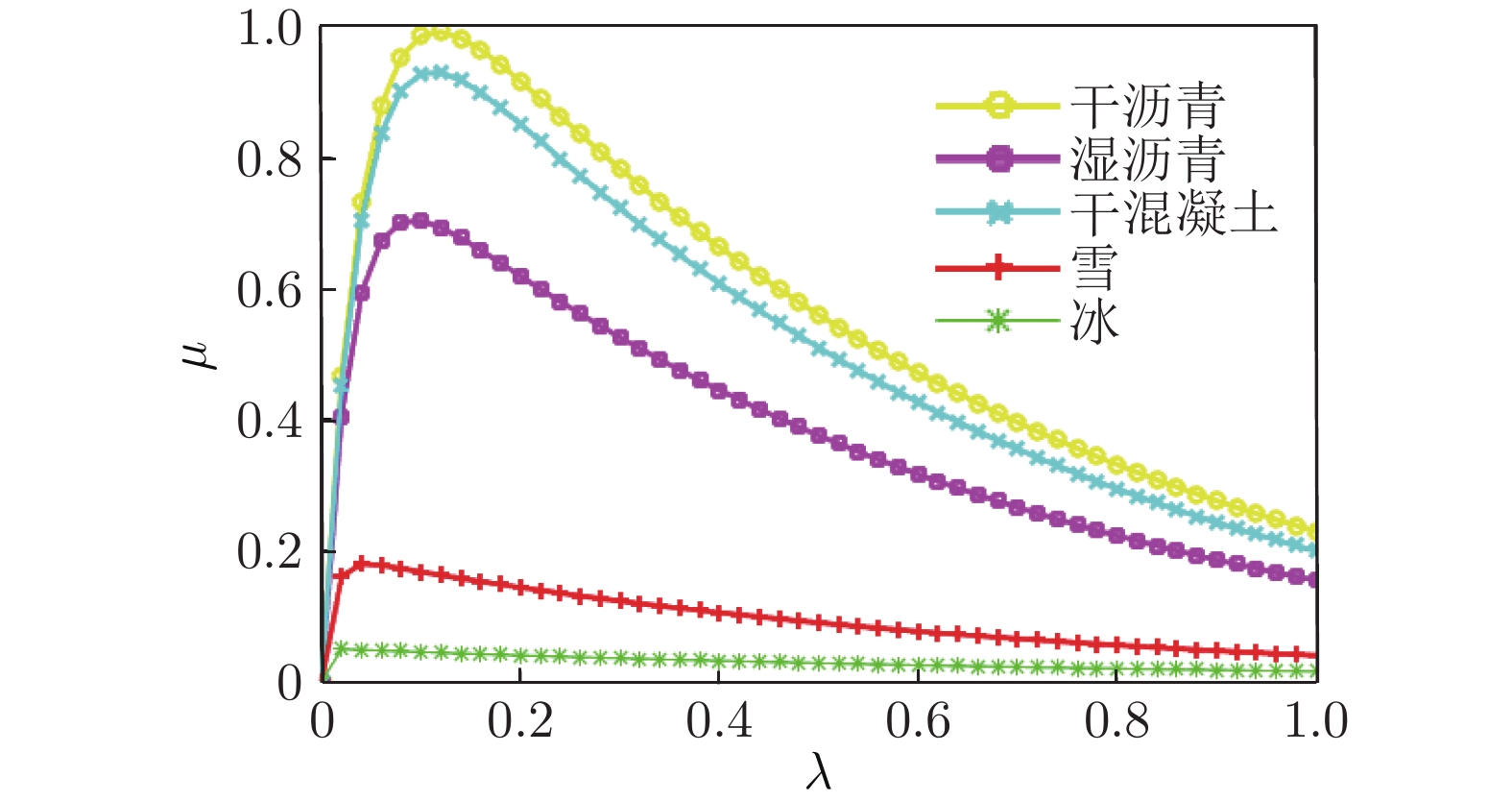 图 4
图 4${v_x}$ = 30 m/s不同跑道状态$\mu $ -$\lambda $ 曲线Fig. 4 Curve of$\mu $ -$\lambda $ on the different runway conditions with${v_x}$ = 30 m/s防滑刹车驱动部分采用机电作动器, 其由无刷直流电机通过减速齿轮驱动滚珠丝杠, 丝杠沿着轴方向旋转运动, 驱动压紧盘对刹车盘加压, 产生刹车力矩. 当释放刹车压力时, 电机反转, 丝杠回退. EMA机械子系统和电气子系统模型分别为
$${\dot P_A}=\frac{{{c_b}{L_0}}}{{2\pi }}{w_m}$$ (9) 其中, 为
${c_b}$ 刹车盘刚度系数,${L_0}$ 为滚珠丝杠行程,${w_m}$ 为转子角速度.$${\dot w_m}=\frac{1}{{{J_m}}}\left( {{k_T}i - \frac{{{L_0}}}{{2\pi }}{P_A} - {B_v}{w_m}} \right)$$ (10) 其中,
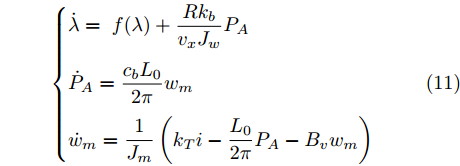
${J_m}$ 为转子转动惯量,${k_T}$ 为电机转矩常数,$i$ 为电枢电流,${B_v}$ 为粘滞阻尼系数.联合式(7)、(9)和(10)可得到完整的飞机全电刹车系统模型为
$$\left\{ \begin{aligned} &\dot \lambda =\;f(\lambda ) + \frac{{R{k_b}}}{{{v_x}{J_w}}}{P_A} \\ & {{\dot P}_A}=\frac{{{c_b}{L_0}}}{{2\pi }}{w_m} \\ & {{\dot w}_m}=\frac{1}{{{J_m}}}\left( {{k_T}i - \frac{{{L_0}}}{{2\pi }}{P_A} - {B_v}{w_m}} \right) \end{aligned} \right.$$ (11) 选取状态变量
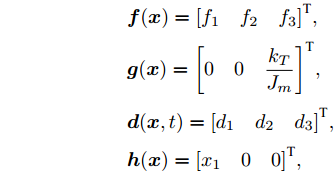
${\boldsymbol{x}}={\left[ \lambda \;\;{{P_A}}\;\;{{w_m}} \ \right]^{\rm{T}}}$ , 输入变量$u=i$ , 输出变量${\boldsymbol{y}}=[\lambda\;\;0\;\;0]^{\rm{T}}$ . 考虑到实际飞机防滑刹车过程中存在不确定性干扰, 将式(11)改写为$$\left\{ \begin{aligned} &{\dot{\boldsymbol{x}}} = {\boldsymbol{f}}({\boldsymbol{x}}) + {\boldsymbol{g}}({\boldsymbol{x}})u + {\boldsymbol{d}}({\boldsymbol{x}},t)\\ &{\boldsymbol{y}} = {\boldsymbol{h}}({\boldsymbol{x}}) \end{aligned} \right.$$ (12) 其中,
${\boldsymbol{d}}\left( {{\boldsymbol{x}},{{t}}} \right) = {{\Delta}} {\boldsymbol{f}}({\boldsymbol{x}}) + {{\Delta}} {\boldsymbol{g}}({\boldsymbol{x}})u + {{\boldsymbol{f}}_{\boldsymbol{d}}}$ ,${{\Delta}} {\boldsymbol{f}}({\boldsymbol{x}})$ 、${{\Delta}} {\boldsymbol{g}}({\boldsymbol{x}})u$ 为参数摄动引起的内部干扰,${{\boldsymbol{f}}_{\boldsymbol{d}}}$ 为时变和未建模部分引起的外部干扰. 系统(12)中的相关向量参数及输出函数为$$ \begin{split} &{\boldsymbol{f}}({\boldsymbol{x}})={\left[ {{f_1}\quad {f_2}\quad {f_3}} \right]^{\rm{T}}},\\ &{\boldsymbol{g}}({\boldsymbol{x}})={\left[ {0\quad 0\quad \frac{{{k_T}}}{{{J_m}}}} \right]^{\rm{T}}},\\ & {\boldsymbol{d}}({\boldsymbol{x}},{{t}})={\left[ {{d_1}\quad {d_2}\quad {d_3}} \right]^{\rm{T}}},\\ &{\boldsymbol{h}}({\boldsymbol{x}})={\left[ {{x_1}\quad 0\quad 0} \right]^{\rm{T}}}, \end{split}$$ 其中,
${f_1}=f({x_1}) + \dfrac{{R{k_b}}}{{{v_x}{J_w}}}{x_2}$ ,${f_2}=\dfrac{{{c_b}{L_0}}}{{2\pi }}{x_3}$ ,${f_3}=\dfrac{1}{{{J_m}}}\times $ $ \left( { - \dfrac{{{L_0}}}{{2\pi }}{x_2} - {B_v}{x_3}} \right)$ .针对式(12)全电刹车非线性系统, 进行反馈线性化处理[26-27], 基于微分几何理论对系统模型坐标变换为
初始:
$$L_f^0{\boldsymbol{h}}({\boldsymbol{x}})=x{}_1$$ 一阶:
$$ \begin{split} &{L_g}{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial L_f^0{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{g}}({\boldsymbol{x}})=0,\\ &{L_d}{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial L_f^0{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{d}}({\boldsymbol{x}},{{t}})={d_1},\\ &{L_f}{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial L_f^0{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{f}}({\boldsymbol{x}})=f({x_1}) + \frac{{R{k_b}}}{{{v_x}{J_w}}}{x_2}, \end{split}$$ 二阶:
$$ \begin{split} &{L_g}{L_f}{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial {L_f}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{g}}({\boldsymbol{x}})=0,\\ &{L_d}{L_f}{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial {L_f}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{d}}({\boldsymbol{x}},{{t}})=\dot f({x_1}){d_1} + \frac{{R{k_b}}}{{{v_x}{J_w}}}{d_2},\\ &\frac{{\partial {L_d}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial t}}={\dot d_1},\\ & L_f^2{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial {L_f}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{f}}({\boldsymbol{x}}) =\\ &\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\dot f({x_1})\left[ {f({x_1}) + \frac{{R{k_b}}}{{{v_x}{J_w}}}{x_2}} \right] + \frac{{{c_b}{L_0}R{k_b}}}{{2\pi {v_x}{J_w}}}{x_3}, \end{split} $$ 三阶:
$$ \begin{split} &{L_g}L_f^2{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial L_f^2{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{g}}({\boldsymbol{x}})=\frac{{{c_b}{L_0}R{k_b}{k_T}}}{{2\pi {v_x}{J_w}{J_m}}} \ne 0,\\ & {L_d}L_f^2{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial L_f^2{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{d}}({\boldsymbol{x}},{{t}})= \\ &\qquad\left\{ {\ddot f({x_1})\left[ {f({x_1}) + \frac{{R{k_b}}}{{{v_x}{J_w}}}{x_2}} \right]} \right. + \left. {{{\left[ {\dot f({x_1})} \right]}^2}} \right\}{d_1} +\\ &\qquad\frac{{R{k_b}}}{{{v_x}{J_w}}}\dot f({x_1}){d_2} + \frac{{{c_b}{L_0}R{k_b}}}{{2\pi {v_x}{J_w}}}{d_3}, \\ &\frac{{\partial {L_d}{L_f}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial t}} + \frac{{{\partial ^2}{L_d}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {t^2}}}=\ddot f({x_1}){d_1} + \dot f({x_1}){{\dot d}_1}+ \\ &\qquad\frac{{R{k_b}}}{{{v_x}{J_w}}}{{\dot d}_2} + {{\ddot d}_1}, \\ &L_f^3{\boldsymbol{h}}({\boldsymbol{x}})=\frac{{\partial L_f^2{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {{\boldsymbol{x}}^{\rm{T}}}}}{\boldsymbol{f}}({\boldsymbol{x}}){\rm{ =}}\left[ {f({x_1}) + \frac{{R{k_b}}}{{{v_x}{J_w}}}{x_2}} \right] \times\\ &\qquad\left\{ {\ddot f({x_1})\left[ {f({x_1}) + \frac{{R{k_b}}}{{{v_x}{J_w}}}{x_2}} \right] + {{\left[ {\dot f({x_1})} \right]}^2}} \right\} +\\ & \qquad\frac{{{c_b}{L_0}R{k_b}}}{{2\pi {v_x}{J_w}}}\dot f({x_1}){x_3} +\\ &\qquad\frac{{{c_b}{L_0}R{k_b}}}{{2\pi {v_x}{J_w}{J_m}}}\left( { - \frac{{{L_0}}}{{2\pi }}{x_2} - {B_v}{x_3}} \right). \end{split} $$ 由于
${L_g}{\boldsymbol{h}}({\boldsymbol{x}})=0$ ,${L_g}{L_f}{\boldsymbol{h}}({\boldsymbol{x}})=0$ ,${L_g}L_f^2{\boldsymbol{h}}({\boldsymbol{x}}) \ne $ $ 0$ , 刹车系统的相对阶为3, 等于系统的阶次, 满足反馈线性化要求, 因此原系统(12)可转化成如下线性标准系统$$\left\{ \begin{aligned} &\dot {\boldsymbol{Z}}={\boldsymbol{F}}\left( {\boldsymbol{x}} \right) + {\boldsymbol{G}}\left( {\boldsymbol{x}} \right)u + {\boldsymbol{\delta}} \\ &y={z_1} \end{aligned} \right.$$ (13) 其中,
${\boldsymbol{Z}}=\left[ {\begin{aligned} {{z_1}} \\ {{z_2}} \\ {{z_3}} \end{aligned}} \right]$ ,${\boldsymbol{F}}\left( {\boldsymbol{x}} \right)=\left[ {\begin{aligned} {{L_f}{\boldsymbol{h}}({\boldsymbol{x}})} \\ {L_f^2{\boldsymbol{h}}({\boldsymbol{x}})} \\ {L_f^3{\boldsymbol{h}}({\boldsymbol{x}})} \end{aligned}} \right]=\left[ {\begin{aligned} {{z_2}}\;\; \;\\ {{z_3}} \;\;\;\\ {{a_3}\left( z \right)} \end{aligned}} \right]$ ,$$ \begin{split} &{\boldsymbol{G}}\left( {\boldsymbol{x}} \right)=\left[ {\begin{array}{*{20}{c}} {{L_g}{\boldsymbol{h}}({\boldsymbol{x}})}\\ {{L_g}{L_f}{\boldsymbol{h}}({\boldsymbol{x}})}\\ {{L_g}L_f^2{\boldsymbol{h}}({\boldsymbol{x}})} \end{array}} \right]=\left[ {\begin{array}{*{20}{c}} 0\\ 0\\ {{b_3}\left( z \right)} \end{array}} \right] ,\\ &{\boldsymbol{\delta}} =\left[ {\begin{array}{*{20}{c}} {{\delta _1}}\\ {{\delta _2}}\\ {{\delta _3}} \end{array}} \right]=\left[ {\begin{array}{*{20}{c}} {{L_d}{\boldsymbol{h}}({\boldsymbol{x}})}\\ {{L_d}{L_f}{\boldsymbol{h}}({\boldsymbol{x}}) + \frac{{\partial {L_d}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial t}}}\\ {{L_d}L_f^2{\boldsymbol{h}}({\boldsymbol{x}}) + \frac{{\partial {L_d}{L_f}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial t}} + \frac{{{\partial ^2}{L_d}{\boldsymbol{h}}({\boldsymbol{x}})}}{{\partial {t^2}}}} \end{array}} \right]. \end{split} $$ 2. 基于干扰观测器的滑模控制
本节将设计飞机防滑刹车系统的干扰观测器, 并考虑基于递归结构的快速终端滑模控制设计和稳定性分析.
2.1 非线性干扰观测器设计
针对系统(13), 推广至
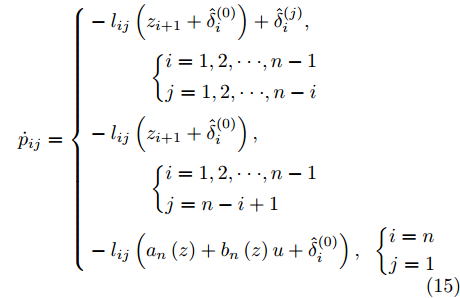
$n$ 阶系统, 对干扰$\delta _i^{(j - 1)}$ 进行预估[28], 其观测值为$$\hat \delta _i^{\left( {j - 1} \right)}={p_{ij}} + {l_{ij}}{z_i}{\rm{, }}\left\{ \begin{array}{l} i=1,2, \cdot \cdot \cdot ,n \\ j=1,2, \cdot \cdot \cdot ,n - i + 1 \end{array} \right.{\rm{ }}$$ (14) 其中,
${l_{ij}}{\rm{=}}\dfrac{{\partial {p_{ij}}}}{{\partial {z_i}}}$ 为非线性干扰观测器增益. 辅助变量${\dot p_{ij}}$ 满足约束条件, 并定义为$${\dot p_{ij}}=\left\{ \begin{aligned} &- {l_{ij}}\left( {{z_{i + 1}} + \hat \delta _i^{\left( 0 \right)}} \right) + \hat \delta _i^{\left( j \right)}{\rm{, }}\\ &\;\;\;\;\;\;\;\;\;\;\;\left\{ \begin{aligned} &i=1,2, \cdot \cdot \cdot ,n - 1 \\ &j=1,2, \cdot \cdot \cdot ,n - i \end{aligned} \right.\; \\ &- {l_{ij}}\left( {{z_{i + 1}} + \hat \delta _i^{\left( 0 \right)}} \right){\rm{, }}\\ &\;\;\;\;\;\;\;\;\;\;\;\left\{ \begin{aligned} &i=1,2, \cdot \cdot \cdot ,n - 1 \\ &j=n - i + 1 \end{aligned} \right. \\ & - {l_{ij}}\left( {{a_n}\left( z \right) + {b_n}\left( z \right)u + \hat \delta _i^{\left( 0 \right)}} \right){\rm{, }}\;\;\left\{ \begin{aligned} & i=n \\ & j=1 \end{aligned} \right. \end{aligned} \right.{\rm{ }}$$ (15) 其中,
${a_n}\left( z \right)$ ,${b_n}\left( z \right)$ 为经过反馈线性化处理后的系统参数,${a_n}\left( z \right)=L_f^n{\boldsymbol{h}}({\boldsymbol{x}})$ ,${b_n}\left( z \right)={L_g}L_f^{n - 1}{\boldsymbol{h}}({\boldsymbol{x}})$ ,$\hat \delta _i^{\left( 0 \right)}$ 与$\hat \delta _i^{(j)}$ 分别是$\delta _i^{\left( 0 \right)}$ 、$\delta _i^{(j)}$ 的观测值, 并对其观测误差分别定义为$$\tilde \delta _i^{\left( 0 \right)}{\rm=}\delta _i^{\left( 0 \right)} - \hat \delta _i^{\left( 0 \right)}$$ (16) $$\tilde \delta _i^{\left( j \right)}{\rm=}\delta _i^{\left( j \right)} - \hat \delta _i^{\left( j \right)}$$ (17) 将式(14)求导, 结合式(13)、(15) ~ (17), 得
$${\dot{\tilde{\delta}}} _i^{\left( {j - 1} \right)}=\left\{ \begin{aligned} & - {l_{ij}}\tilde \delta _i^{\left( 0 \right)} + \tilde \delta _i^{\left( j \right)},\;\;\;\;\left\{ \begin{aligned} & i=1,2, \cdot \cdot \cdot ,n - 1 \\ & j=1,2, \cdot \cdot \cdot ,n - i \end{aligned} \right. \\ & - {l_{ij}}\tilde \delta _i^{\left( 0 \right)} + \delta _i^{\left( j \right)},\;\;\;\;\left\{ \begin{aligned} & i=1,2, \cdot \cdot \cdot ,n - 1 \\ & j=n - i + 1 \end{aligned} \right. \\ & - {l_{ij}}\tilde \delta _i^{\left( 0 \right)} + \delta _i^{\left( j \right)},\;\;\;\;\left\{ \begin{aligned} & i=n \\ & j=1 \end{aligned} \right. \end{aligned} \right.$$ (18) 选取状态变量
${\tilde {\boldsymbol{E}}_{{i}}}={\left[ {\tilde \delta _i^{\left( 0 \right)}}\;\;{\tilde \delta _i^{\left( 1 \right)}}\;\; \cdots \;\;{\tilde \delta _i^{\left( {j - 1} \right)}} \right]^{\rm{T}}}$ , 将式(18)观测误差的状态方程写成紧凑形式为$${{\dot{\tilde{\boldsymbol{E}}}}_{{i}}}={{\boldsymbol{A}}_{{i}}}{\tilde {\boldsymbol{E}}_{{i}}} + {{\boldsymbol{B}}_{{i}}}\delta _i^{\left( j \right)}$$ (19) 其中,
${{\boldsymbol{A}}_{{i}}}=\left[ {\begin{aligned} \begin{aligned} - {l_{i1}}\;\;\; \\ - {l_{i2}}\;\;\; \\ \vdots\;\;\;\;\; \\ { - {l_{i\left( {j - 1} \right)}}} \\ - {l_{ij}}\;\;\; \end{aligned}\;&\begin{aligned} 1 \\ 0 \\ \vdots \,\\ 0 \\ 0 \end{aligned}\;&\begin{aligned} \cdots \\ 1\; \\ \vdots\;\, \\ 0\; \\ 0 \;\end{aligned} \;&\begin{aligned} 0 \;\\ 0\; \\ \ddots \\ \cdots\\ \cdots\end{aligned}\;&\begin{aligned} 0 \\ 0 \\ \ \vdots\, \\ 1 \\ 0 \end{aligned}\end{aligned}}\;\right]$ ,${{\boldsymbol{B}}_{{i}}}=\left[\; {\begin{aligned} 0 \\ 0 \\ \vdots\, \\ 0 \\ 1 \end{aligned}}\; \right]$ .选择合适的非线性干扰观测器增益矩阵
${{\boldsymbol{A}}_{{i}}}$ , 总能找到一个正定矩阵${{\boldsymbol{P}}_{{i}}}$ , 使得矩阵${{\boldsymbol{A}}_{{i}}}$ 特征值满足如下不等式$${\boldsymbol{A}}_{{i}}^{\rm{T}}{{\boldsymbol{P}}_{{i}}} + {{\boldsymbol{P}}_{{i}}}{{\boldsymbol{A}}_{{i}}}= - {{\boldsymbol{Q}}_{{i}}}$$ (20) 其中,
${{\boldsymbol{Q}}_{{i}}}$ 为给定的正定矩阵. 定义Lyapunov函数为$${W_i}\left( {{{\tilde {\boldsymbol{E}}}_{{i}}}} \right)=\tilde {\boldsymbol{E}}_{{i}}^{\rm{T}}{{\boldsymbol{P}}_{{i}}}{\tilde {\boldsymbol{E}}_{{i}}}$$ (21) 对式(21)求导, 并结合式(19) ~ (20), 得
$$\begin{split} {{\dot W}_i}\left( {{{\tilde {\boldsymbol{E}}}_{{i}}}} \right)=\;&\tilde {\boldsymbol{E}}_{{i}}^{\rm{T}}\left( {{\boldsymbol{A}}_{{i}}^{\rm{T}}{{\boldsymbol{P}}_{{i}}} + {{\boldsymbol{P}}_{{i}}}{{\boldsymbol{A}}_{{i}}}} \right){{\tilde {\boldsymbol{E}}}_{{i}}} + 2\tilde {\boldsymbol{E}}_{{i}}^{\rm{T}}{{\boldsymbol{P}}_{{i}}}{{\boldsymbol{B}}_{{i}}}\delta _i^{\left( j \right)} \leq\\ &- \tilde {\boldsymbol{E}}_{{i}}^{\rm{T}}{{\boldsymbol{Q}}_{{i}}}{{\tilde {\boldsymbol{E}}}_{{i}}} + 2\left\| {{{\boldsymbol{P}}_{{i}}}{{\boldsymbol{B}}_{{i}}}} \right\| \cdot \left\| {{{\tilde {\boldsymbol{E}}}_{{i}}}} \right\|\delta _i^{\left( j \right)} \leq\\ &- \left\| {{{\tilde {\boldsymbol{E}}}_{{i}}}} \right\|\left( {{\lambda _{i\min }}\left\| {{{\tilde {\boldsymbol{E}}}_{{i}}}} \right\| - 2\left\| {{{\boldsymbol{P}}_{{i}}}{{\boldsymbol{B}}_{{i}}}} \right\| \cdot {\delta _{im}^{\left( j \right)}} } \right) \end{split} $$ (22) 其中,
${\lambda _{i\min }}$ 为${{\boldsymbol{Q}}_{{i}}}$ 的最小特征值, 干扰$\delta _i^{\left( j \right)}$ 是有界的, 满足$\delta _i^{\left( j \right)} \leq {\delta _{im}^{\left( j \right)}}$ . 因此, 为了保证误差动态系统渐近稳定, 观测误差需满足如下条件:$$\left\| {{{\tilde {\boldsymbol{E}}}_{{i}}}} \right\| \geq \frac{{2\left\| {{{\boldsymbol{P}}_{{i}}}{{\boldsymbol{B}}_{{i}}}} \right\| \cdot {\delta _{im}^{\left( j \right)}} }}{{{\lambda _{i\min }}}}$$ (23) 由式(23)可知, 观测器增益矩阵
${{\boldsymbol{A}}_{{i}}}$ 决定了${{\left| {{{\boldsymbol{P}}_{{i}}}} \right|} / {{\lambda _{i\min }}}}$ 比率的大小, 对观测误差动态系统的稳定性起着决定性作用. 选择较大的非线性干扰观测器增益值, 可以降低干扰观测误差, 同时也带来弊端, 如: 增加了观测器对干扰预估的灵敏度. 此外, 针对干扰$\delta _i^{(j - 1)}$ , 若导函数的阶次越高, 会导致观测精度下降. 因此, 非线性干扰观测器增益矩阵${{\boldsymbol{A}}_{{i}}}$ 的选择需要对期望的精度和观测质量之间进行权衡.最后, 要求每一阶次
$\left( {i=1,2, \cdots ,n} \right)$ 的干扰观测器设计满足式(18) ~ (23), 使得全局稳定, 推广至全局Lyapunov函数为$$\dot W\left( {\tilde {\boldsymbol{E}}} \right)=\sum\limits_{i=1}^n {{{\dot W}_i}} \left( {{{\tilde {\boldsymbol{E}}}_{{i}}}} \right)$$ (24) 其中,
$\tilde {\boldsymbol{E}}={\left[ {{{\tilde {\boldsymbol{E}}}_{{1}}}}\;\;{{{\tilde {\boldsymbol{E}}}_{{2}}}}\;\; \cdots \;\;{{{\tilde {\boldsymbol{E}}}_{{i}}}} \right]^{\rm{T}}}$ .根据本文提出的飞机防滑刹车系统阶次, 取
$n=3$ .2.2 控制目标
通过单个主轮受刹动力学方程与地面与主轮间摩擦系数方程分析
$\mu $ 与$\lambda $ 之间的关系来判断是否处于打滑阶段, 进而明确控制目标.结合式(5), 可将式(3)改写为
$${J_w}\frac{{{\rm{d}}w}}{{{\rm{d}}t}}=\mu {N_1}R - {k_b}{P_A}$$ (25) 考虑给主轮一个较小的刹车压力
$\Delta {P_A}$ , 满足假设(1) ~ (3), 将主轮受到的垂直载荷视为恒定, 则$${J_w}\frac{{{\rm{d}}\Delta w}}{{{\rm{d}}t}}=\Delta \mu {N_1}R - {k_b}\Delta {P_A}$$ (26) 其中,
$\Delta \mu =\dfrac{{\partial \mu }}{{\partial w}}\Delta w + \dfrac{{\partial \mu }}{{\partial {P_A}}}\Delta {P_A}$ . 初始条件为零, 以$w\left( s \right)$ 为输出、${P_A}\left( s \right)$ 为输入的传递函数为$$\frac{{w\left( s \right)}}{{{P_A}\left( s \right)}}=\frac{{{N_1}R\frac{{\partial \mu }}{{\partial {P_A}}} - {k_b}}}{{{J_w}s - {N_1}R\frac{{\partial \mu }}{{\partial w}}}}$$ (27) 传递函数
$\dfrac{{w\left( s \right)}}{{{P_A}\left( s \right)}}$ 的极点为$s=\dfrac{{{N_1}R}}{{{J_w}}} \cdot \dfrac{{\partial \mu }}{{\partial w}}$ . 式(4)中$w$ 对$\lambda $ 求偏导为$$\frac{{\partial w}}{{\partial \lambda }}= - \frac{{{v_x}}}{R}$$ (28) 通过式(7)能够获悉每个时刻的飞机速度, 在滑移率
$\left[ {\left. {0,1} \right)} \right.$ 范围内, 对式(8)求导, 并令$\dfrac{{\partial \mu }}{{\partial \lambda }}=0$ . 此时得到的滑移率定义最佳滑移率${\lambda ^{\rm{*}}}$ , 对应的是最大摩擦系数${\mu _{\max }}$ . 将$\mu $ 表示为$\lambda $ 的单变量拟合函数, 如图5所示.若
$\lambda < {\lambda ^{\rm{*}}}$ , 根据式(3), 在刹车压力${P_A}$ 的作用下, 机轮角速度$w$ 降低, 使得滑移率$\lambda $ 从${\lambda _1}$ 增加到${\lambda _2}$ 、摩擦系数$\mu $ 从${\mu _1}$ 增加到${\mu _2}$ . 如果保持刹车压力不变, 使得飞机纵向速度${v_x}$ 减小, 导致$\lambda $ 下降到${\lambda _3}$ ,$\mu $ 随之下降到${\mu _3}$ , 整个刹车系统能够保持稳定, 如图5 (b)所示. 同时, 也可从图5 (a)可知,$\dfrac{{\partial \mu }}{{\partial \lambda }} > 0$ , 则$\dfrac{{\partial \mu }}{{\partial \lambda }}=\dfrac{{\partial \mu }}{{\partial w}} \cdot \dfrac{{\partial w}}{{\partial \lambda }}= - \dfrac{{{v_x}}}{R} \cdot \dfrac{{\partial \mu }}{{\partial w}} > 0$ , 得出$\dfrac{{\partial \mu }}{{\partial w}} < 0$ 、$s < 0$ , 表明此时主轮处于稳定刹车状态.正相反地, 若
$\lambda > {\lambda ^{\rm{*}}}$ , 与上述分析一致,$\lambda $ 从${\lambda _4}$ 增加到${\lambda _5}$ 、$\mu $ 从${\mu _4}$ 减小到${\mu _5}$ . 如果保持刹车压力不变, 使得${v_x}$ 增大, 导致$\lambda $ 增加到${\lambda _6}$ ,$\mu $ 随之下降到${\mu _6}$ , 由于滑移率$\lambda $ 不断增加, 会使得主轮锁定打滑, 容易造成侧滑或甩尾, 如图5 (c)所示. 同时, 也可从图5 (a)可知,$\dfrac{{\partial \mu }}{{\partial \lambda }} < 0$ , 则$\dfrac{{\partial \mu }}{{\partial \lambda }}= - \dfrac{{{v_x}}}{R} \cdot \dfrac{{\partial \mu }}{{\partial w}} < 0$ , 得出$\dfrac{{\partial \mu }}{{\partial w}} > 0$ 、$s > 0$ , 表明此时主轮处于不稳定刹车状态. 因此, 可依据最佳滑移率${\lambda ^{\rm{*}}}$ 将刹车状态划分为稳定区与非稳定区.基于上述分析, 飞机防滑刹车控制目标为跟踪最佳滑移率, 以获得最大结合力矩, 同时确保了主轮处于稳定工作区域. 由静摩擦系数模型(8)可知, 最大摩擦系数受跑道状态、飞机速度、滑移率等因素影响. 因此, 每个时刻的最佳滑移率是变化的, 下面将设计基于非线性干扰观测器的滑模控制, 以达到良好跟踪效果.
2.3 快速终端滑模控制器设计
定理 1[29]. 若Lyapunov函数
$V\left( x \right)$ 满足如下不等式$$\dot V\left( x \right) \leq - {\beta _1}{V^{{\beta _2}}}\left( x \right)$$ (29) 其中,
${\beta _1} > 0$ ,$0 < {\beta _2} < 1$ ,$V\left( x \right)$ 可以有限时间收敛至零, 收敛时间为$$t \leq \frac{{{V^{1 - {\beta _2}}}\left( {{x_0}} \right)}}{{{\beta _1}\left( {1 - {\beta _2}} \right)}}$$ (30) 本节提出一种递归结构的快速终端滑模控制方法, 该方法受到文献[30-31]所提出的一类快速终端滑动模态的启发. 针对高阶系统, 选取滑模面为
$$\left\{ \begin{aligned} &{s_0}={z_1} - {z_d} \\ &{s_1}=\;s_0^{\left( 1 \right)} + {k_1}{s_0} + {k_2}{\left| {{s_0}} \right|^\alpha }{\rm{sgn}} ({s_0}) \\ &{s_2}=s_1^{\left( 1 \right)} + {k_1}{s_1} + {k_2}{\left| {{s_1}} \right|^\alpha }{\rm{sgn}} ({s_1}) \\ & \;\; \vdots \\ &{s_{n - 1}}=s_{n - 2}^{\left( 1 \right)} + {k_1}{s_{n - 2}} + {k_2}{\left| {{s_{n - 2}}} \right|^\alpha }{\rm{sgn}} ({s_{n - 2}}) \end{aligned} \right.$$ (31) 其中,
${z_d}$ 为实时的最佳滑移率,${k_1},{k_2} > 0$ ,$\alpha = $ $ \dfrac{q}{p} < 1$ ,$p\;,\;\;q$ 均为奇数, 且满足$q < p < 2q$ . 设计控制律为$$\begin{split} u=\;& - {b_n^{ - 1}}{(z)}\bigg[{a_n}(z) + \left( {s_1^{\left( {n - 1} \right)} - s_0^{\left( n \right)}} \right) +\\ &\left( {s_2^{\left( {n - 2} \right)} - s_1^{\left( {n - 1} \right)}} \right) + \cdot \cdot \cdot + \left( {s_{n - 1}^{\left( 1 \right)} - s_{n - 2}^{\left( 2 \right)}} \right) +\\ &\hat \delta _n^{\left( 0 \right)} + \hat \delta _{n - 1}^{\left( 1 \right)} + \cdot \cdot \cdot + \hat \delta _2^{\left( {n - 2} \right)} +\hat \delta _1^{\left( {n - 1} \right)} + \\ &{m_1}{s_{n - 1}} + {m_2}{\left| {{s_{n - 1}}} \right|^\beta }{\rm{sgn}} \left( {{s_{n - 1}}} \right) - z_d^{\left( n \right)}\bigg] =\\ & - {b_n^{ - 1}}{(z)}\bigg[ {a_n}(z) + \left( {s_{n - 1}^{\left( 1 \right)} - s_0^{\left( n \right)}} \right) + \hat \delta _n^{\left( 0 \right)} + \\ & \hat \delta _{n - 1}^{\left( 1 \right)} + \cdot \cdot \cdot + \hat \delta _2^{\left( {n - 2} \right)} + \hat \delta _1^{\left( {n - 1} \right)} + {m_1}{s_{n - 1}}+ \\ & { {m_2}{{\left| {{s_{n - 1}}} \right|}^\beta }{\rm{sgn}} \left( {{s_{n - 1}}} \right) - z_d^{\left( n \right)}} \bigg]\\[-15pt] \end{split} $$ (32) 其中, 干扰观测值
$\hat \delta _n^{\left( 0 \right)},\hat \delta _{n - 1}^{\left( 1 \right)}, \cdot \cdot \cdot ,\hat \delta _1^{\left( {n - 2} \right)},\hat \delta _1^{\left( {n - 1} \right)}$ 来源于第2.1节.将递归型滑模面(31)中
${s_{i - 1}}\left( {i=1,2, \cdots ,n} \right)$ 分别求$j\left( {j=n,n - 1, \cdots ,1} \right)$ 次导数, 再与式(32)联立可得滑模变量${s_{n - 1}}$ 的导数为$$\begin{split} s_{n - 1}^{\left( 1 \right)}= \;&- {m_1}{s_{n - 1}} - {m_2}{\left| {{s_{n - 1}}} \right|^\beta }{\rm{sgn}} \left( {{s_{n - 1}}} \right) +\\ & \tilde \delta _n^{\left( 0 \right)} + \tilde \delta _{n - 1}^{\left( 1 \right)} + \cdot \cdot \cdot + \tilde \delta _2^{\left( {n - 2} \right)} + \tilde \delta _1^{\left( {n - 1} \right)}\end{split} $$ (33) 设计Lyapunov函数为:
$V=\dfrac{1}{2}s_{n - 1}^2$ . 结合式(33), 可得$$\begin{split} \dot V=\;&{s_{n - 1}}s_{n - 1}^{\left( 1 \right)} =\\ &{s_{n - 1}}\left( { - {m_1}{s_{n - 1}} - {m_2}{{\left| {{s_{n - 1}}} \right|}^\beta }{\rm{sgn}} \left( {{s_{n - 1}}} \right)} \right. +\\ &\left. { \tilde \delta _n^{\left( 0 \right)} + \tilde \delta _{n - 1}^{\left( 1 \right)} + \cdot \cdot \cdot + \tilde \delta _2^{\left( {n - 2} \right)} + \tilde \delta _1^{\left( {n - 1} \right)}} \right)= \\ & - {m_1}{\left| {{s_{n - 1}}} \right|^2} - {m_2}{\left| {{s_{n - 1}}} \right|^{\beta + 1}} + \\ &\left( {\tilde \delta _n^{\left( 0 \right)} + \tilde \delta _{n - 1}^{\left( 1 \right)} + \cdot \cdot \cdot + \tilde \delta _2^{\left( {n - 2} \right)} + \tilde \delta _1^{\left( {n - 1} \right)}} \right){s_{n - 1}} \leq\\ &- {m_1}{\left| {{s_{n - 1}}} \right|^2} - {m_2}{\left| {{s_{n - 1}}} \right|^{\beta + 1}} +\\ & \left( {\tilde \delta _n^{\left( 0 \right)} + \tilde \delta _{n - 1}^{\left( 1 \right)} + \cdot \cdot \cdot + \tilde \delta _2^{\left( {n - 2} \right)} + \tilde \delta _1^{\left( {n - 1} \right)}} \right)\left| {{s_{n - 1}}} \right| \end{split} $$ (34) 取
${\varepsilon _{\max }} \geq \tilde \delta _n^{\left( 0 \right)} + \tilde \delta _{n - 1}^{\left( 1 \right)} + \cdot \cdot \cdot + \tilde \delta _2^{\left( {n - 2} \right)} + \tilde \delta _1^{\left( {n - 1} \right)}$ , 得$$\dot V \leq- {m_1}{\left| {{s_{n - 1}}} \right|^2} - {m_2}{\left| {{s_{n - 1}}} \right|^{\beta + 1}} + {\varepsilon _{\max }}\left| {{s_{n - 1}}} \right|$$ (35) 式(35)可写成两种形式分别为
$$\dot V \leq - {m_1}{\left| {{s_{n - 1}}} \right|^2} + \left( {{\varepsilon _{\max }} - {m_2}{{\left| {{s_{n - 1}}} \right|}^\beta }} \right)\left| {{s_{n - 1}}} \right|$$ (36) $$\dot V\; \leq - {m_2}{\left| {{s_{n - 1}}} \right|^{\beta + 1}} + \left( {{\varepsilon _{\max }} - {m_1}\left| {{s_{n - 1}}} \right|} \right)\left| {{s_{n - 1}}} \right|$$ (37) 1)当
${m_2} \geq {{{\varepsilon _{\max }}} / {{{\left| {{s_{n - 1}}} \right|}^\beta }}}$ 时, 式(36)写成:$\dot V\; \leq $ $ - {\phi _1}\sqrt V$ , 其中${\phi _1}={m_2}{\left| {{s_{n - 1}}} \right|^\beta } - {\varepsilon _{\max }}$ , 满足定理1条件, 有限时间收敛到$\left| {{s_{n - 1}}} \right| \leq {\Delta _1}=\sqrt[\beta ]{{{{{\varepsilon _{\max }}} / {{m_2}}}}}$ 范围内.2)当
${m_1} \geq {{{\varepsilon _{\max }}} / {\left| {{s_{n - 1}}} \right|}}$ 时, 式(37)写成:$\dot V\; \leq $ $ - {\phi _2}\sqrt V$ , 其中${\phi _2}={m_1}\left| {{s_{n - 1}}} \right| - {\varepsilon _{\max }}$ , 满足定理1条件, 有限时间收敛到$\left| {{s_{n - 1}}} \right| \leq {\Delta _2}={{{\varepsilon _{\max }}} / {{m_1}}}$ 范围内.因此, 最终收敛范围为:
$\left| {{s_{n - 1}}} \right| \leq \Delta = \min ( {\Delta _1}, $ $ {\Delta _2})$ . 通过调整${m_1},{m_2}$ 可以使得系统稳定和快速收敛到$\left| {{s_{n - 1}}} \right|=0$ 附近.针对飞机防滑刹车系统(13), 选取滑模面函数为
$$\left\{ \begin{aligned} & {s_0}={z_1} - {z_d} \\ & {s_1}=s_0^{\left( 1 \right)} + {k_1}{s_0} + {k_2}{\left| {{s_0}} \right|^\alpha }{\rm{sgn}} ({s_0}) \\ & {s_2}=s_1^{\left( 1 \right)} + {k_1}{s_1} + {k_2}{\left| {{s_1}} \right|^\alpha }{\rm{sgn}} ({s_1}) \end{aligned} \right.$$ (38) 设计控制律为
$$\begin{split} u=\; &- {b_3^{ - 1}}{(z)}[{a_3}(z) + {k_1}s_0^{\left( 2 \right)} +\\ & {k_2}\alpha \left( {\alpha - 1} \right){\left| {{s_0}} \right|^{\alpha - 2}}{\left( {s_0^{\left( 1 \right)}} \right)^2}{\rm{sgn}} \left( {{s_0}} \right)+ \\ & {k_2}\alpha {\left| {{s_0}} \right|^{\alpha - 1}}s_0^{\left( 2 \right)}{\rm{sgn}} \left( {{s_0}} \right) + {k_1}s_1^{\left( 1 \right)} +\\ & {k_2}\alpha {\left| {{s_1}} \right|^{\alpha - 1}}s_1^{\left( 1 \right)}{\rm{sgn}} \left( {{s_1}} \right) + \hat \delta _3^{\left( 0 \right)} + \hat \delta _2^{\left( 1 \right)}+ \\ & \hat \delta _1^{\left( 2 \right)} + {m_1}{s_2} + {m_2}{\left| {{s_2}} \right|^\beta }{\rm{sgn}} \left( {{s_2}} \right) - z_d^{\left( 3 \right)}] \end{split} $$ (39) 由推广至
$n$ 阶系统的稳定性分析式(34) ~ (37)可知, 满足条件${m_1} \geq {{{\varepsilon _{\max }}} / {\left| {{s_{n - 1}}} \right|}}$ 、${m_2} \geq {{{\varepsilon _{\max }}} / {{{\left| {{s_2}} \right|}^\beta }}}$ ,${\varepsilon _{\max }} \geq \tilde \delta _3^{\left( 0 \right)} + \tilde \delta _2^{\left( 1 \right)} + \tilde \delta _1^{\left( 2 \right)}$ , 飞机防滑刹车控制系统(13)能够稳定, 并有限时间快速收敛至$\left| {{s_2}} \right| \leq \min $ $ \left( {{{{\varepsilon _{\max }}} / {{m_1}}},\sqrt[\beta ]{{{{{\varepsilon _{\max }}} / {{m_2}}}}}} \right)$ 附近, 始终保持优良的跟踪性能.基于反馈线性化和非线性干扰观测器的飞机防滑刹车递归型快速终端滑模控制系统总体算法框图如图6所示, 各功能部分协同配合, 形成一个完整的闭环控制.
 图 6 飞机防滑刹车闭环控制总框图Fig. 6 General block diagram of aircraft antiskid brake closed-loop control
图 6 飞机防滑刹车闭环控制总框图Fig. 6 General block diagram of aircraft antiskid brake closed-loop control3. 仿真分析
为验证所建立的模型与控制律的有效性, 以文献[32]中的飞机模型参数在MATLAB环境下进行仿真试验, 并给出两个实例. 第一种情况是在良好条件的跑道下仿真, 即干沥青跑道, 第二种情况是低摩擦系数的极限工况跑道下仿真, 即雪跑道. 根据假设(3), 前轮在整个刹车过程处于自由滚动, 摩擦系数恒定, 即干沥青: 0.38, 干混凝土: 0.35, 湿沥青: 0.32, 雪: 0.13, 冰: 0.03.
飞机着陆初始速度
${v_x}\left( 0 \right)=72\;{\rm{m/s}}$ , 初始主轮角速度$w\left( 0 \right)=180\;{\rm{rad/s}}$ , 机轮初始滑移率$\lambda \left( 0 \right)=0$ . 当飞机速度小于$5\;{\rm{m/s}}$ , 认定防滑刹车控制结束. 控制器相关参数设定为:$\alpha =0.6$ ,$\beta =0.6$ ,${k_1}=28.5$ ,${k_2}=0.2$ ,${m_1}=200$ ,${m_2}=100$ . 对原系统(12)引入干扰为:${d_1}=0.01\sin \left( {3t} \right)$ ,${d_2}=0$ ,${d_3}=0.01x_1^2{x_2} + $ $ 200\sin \left( {3t + {\pi / 2}} \right) + 50$ .飞机防滑刹车控制性能指标为刹车效率和刹车距离, 其中刹车效率包括最佳滑移率跟踪效率和摩擦系数制动效率
$${\eta _\lambda }={\rm{1}} - \frac{{\displaystyle\int_{{t_0}}^{{t_f}} {\left| {{\lambda ^*}\left( t \right) - \lambda \left( t \right)} \right|{\rm{d}}t} }}{{\displaystyle\int_{{t_0}}^{{t_f}} {{\lambda ^*}\left( t \right){\rm{d}}t} }}$$ (40) $${\eta _\mu }=\frac{{\displaystyle\int_{{t_0}}^{{t_f}} {\mu \left( t \right){\rm{d}}t} }}{{\displaystyle\int_{{t_0}}^{{t_f}} {{\mu _{\max }}\left( t \right){\rm{d}}t} }}$$ (41) 图7为经过反馈线性化处理后的干扰
$\delta _1^{\left( 2 \right)}, $ $ \delta _2^{\left( 1 \right)},\delta _3^{\left( 0 \right)}$ 与其观测值$\hat \delta _1^{\left( 2 \right)},\hat \delta _2^{\left( 1 \right)},\hat \delta _3^{\left( 0 \right)}$ 以及观测误差$\tilde \delta _1^{\left( 2 \right)}, $ $ \tilde \delta _2^{\left( 1 \right)},\tilde \delta _3^{\left( 0 \right)}$ 的历时曲线, 可以看出非线性干扰观测器输出的估计值与实际干扰值误差较小, 除在曲线拐点处有较小的误差外, 其余部分的观测误差较小.针对图8和图9中关于本文提出的递归型快速终端滑模控制方法在不同跑道状态下的仿真试验结果进行分析. 图8、9 (a)为在两种跑道状态下飞机速度和机轮速度的对比曲线, 飞机速度与机轮速度减速平稳, 没有出现较大的波动和机轮深打滑的现象. 图8、9 (b)为在两种跑道状态下飞机刹车距离曲线, 刹车性能指标如表3所示. 从图8、9 (c)可以看出控制器能够快速准确地跟踪实时变化的最佳滑移率, 始终处于稳定区域, 跟踪误差快速收敛, 虽然在冰跑道仿真的滑移率跟踪存在一定抖振, 但是在可接受范围, 经过一段时间后误差逐渐收敛到很小范围. 此外, 根据式(8)得到的摩擦系数保持在最大值附近, 全电刹车作动器输出最优的刹车力矩, 从而获得理想的刹车效率, 如图8、9 (d)所示.
 图 8 干沥青跑道状态下两种控制方法的飞机防滑刹车控制仿真结果Fig. 8 Simulation results of aircraft antiskid brake control with two control methods under dry asphalt runway condition
图 8 干沥青跑道状态下两种控制方法的飞机防滑刹车控制仿真结果Fig. 8 Simulation results of aircraft antiskid brake control with two control methods under dry asphalt runway condition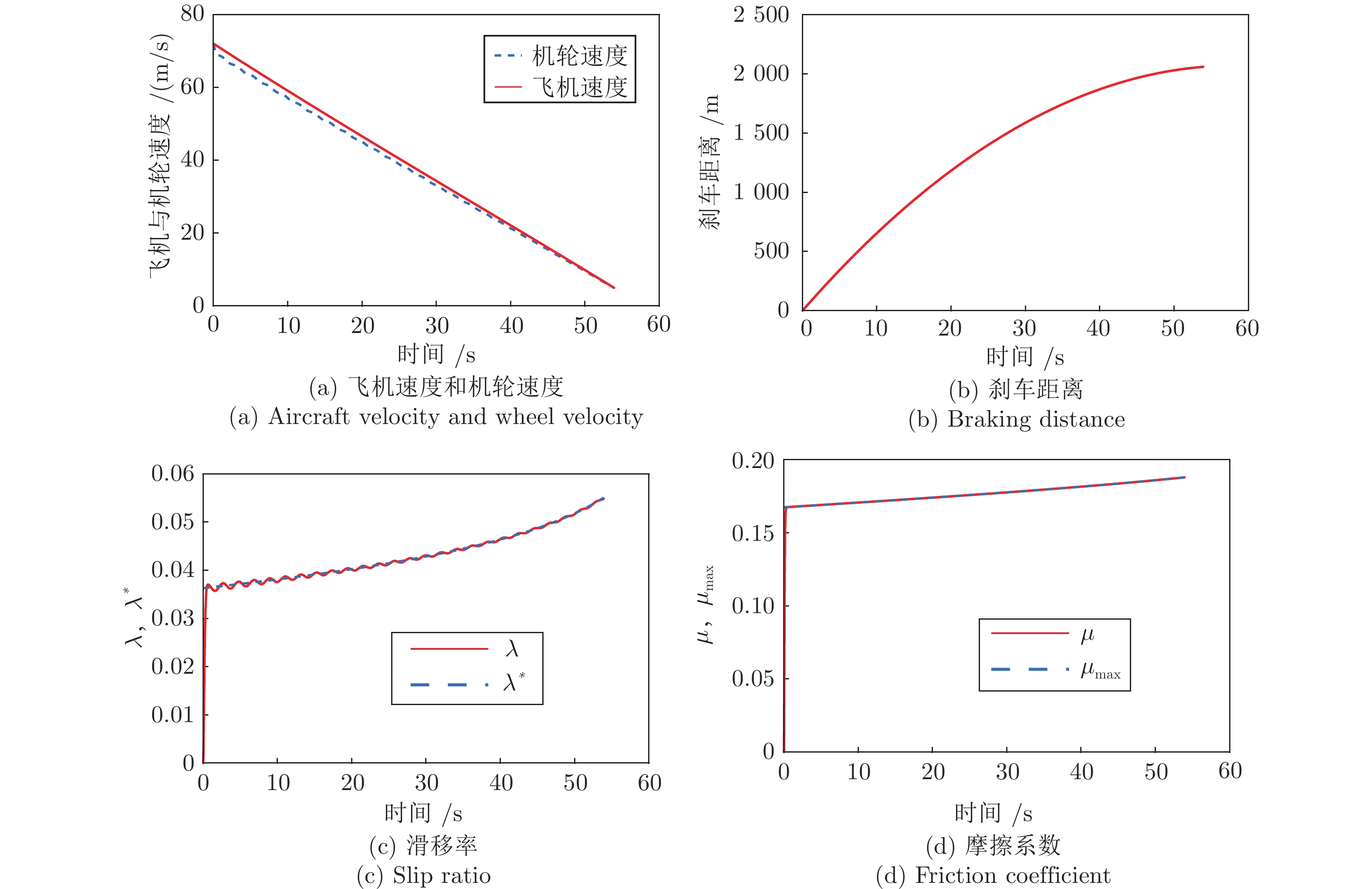 图 9 雪跑道状态下飞机防滑刹车控制仿真结果Fig. 9 Simulation results of aircraft antiskid brake control under snow runway condition表 3 飞机防滑刹车性能指标Table 3 Aircraft antiskid brake performance index
图 9 雪跑道状态下飞机防滑刹车控制仿真结果Fig. 9 Simulation results of aircraft antiskid brake control under snow runway condition表 3 飞机防滑刹车性能指标Table 3 Aircraft antiskid brake performance index性能指标 干沥青 雪 刹车距离 (m) 496.807 2060.411 刹车时间 (s) 11.82 53.92 跟踪效率 (%) 99.43 98.95 制动效率 (%) 99.66 99.17 与此同时, 设计了传统的快速终端滑模控制方法进行对比, 在干沥青跑道状态下进行仿真试验, 如图8所示, 得到防滑刹车性能指标为: 刹车距离506.026 m, 刹车时间11.95 s, 跟踪效率98.13 %, 制动效率98.59 %. 与本文提出的控制方法在性能方面进行比较, 如表4所示.
表 4 两种控制方法性能对比Table 4 Performance comparison of the two control methods对比项目 递归型 传统型 机轮仅工作在稳定区 是 否 最佳滑移率和最大摩擦系数的稳态误差 无 有 暂态至稳态的快速性 较快 较慢 鲁棒性 较强 较弱 从仿真结果可以看出, 传统的快速终端滑模控制方法对最佳滑移率的跟踪效果欠佳, 具体表现在快速性较差、存在稳态误差、易受干扰影响等. 随着刹车过程滑移率逐渐加大, 在低速阶段实际滑移率大于最佳滑移率, 此时刹车状态处于不稳定区, 主轮出现了打滑现象. 根据对比两者刹车性能可知, 本文提出的递归型快速终端滑模控制方法具有较好的跟踪性能, 显著提高了防滑刹车效率和稳定性, 更具有实用价值.
4. 结论
本文研究了飞机防滑刹车系统的非线性干扰观测器设计和最佳滑移率跟踪控制问题. 通过反馈线性化方法, 建立了实际刹车不确定性干扰条件下的全电式防滑刹车系统的标准线性化模型. 对此, 设计了一类新颖的递归结构的快速终端滑模控制器, 在有效降低滑模动态抖振影响的同时, 使飞机防滑刹车系统满足有限时间快速收敛性条件. 此外, 结合非线性干扰观测器对不确定性干扰进行在线估计, 通过在控制率中引入干扰补偿器有效提升了刹车系统的鲁棒性和干扰抑制性. 最后, 通过数值模拟仿真, 验证了本文提出的飞机全电刹车系统滑模控制设计不仅可以防止主轮打滑锁定, 而且在整个制动过程中, 具有良好的性能品质以及较高的制动效率.
在今后的研究中, 将进一步考虑飞机刹车过程中受到横向不对称载荷引起偏离跑道中心线的调整控制, 同时将滑模控制方法与其他优化控制方法相结合, 发展新型高效跟踪最佳滑移率的控制策略.
-
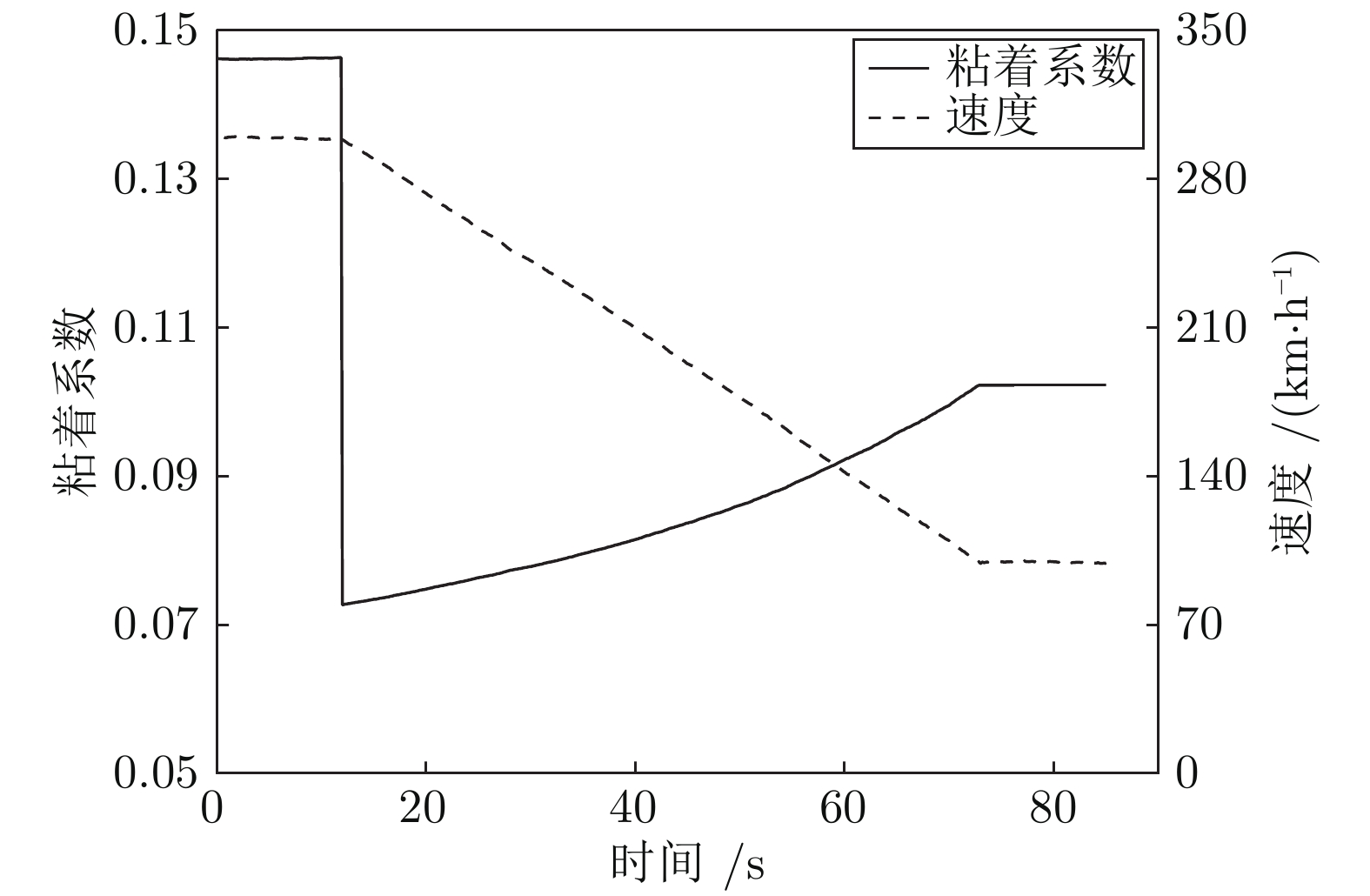
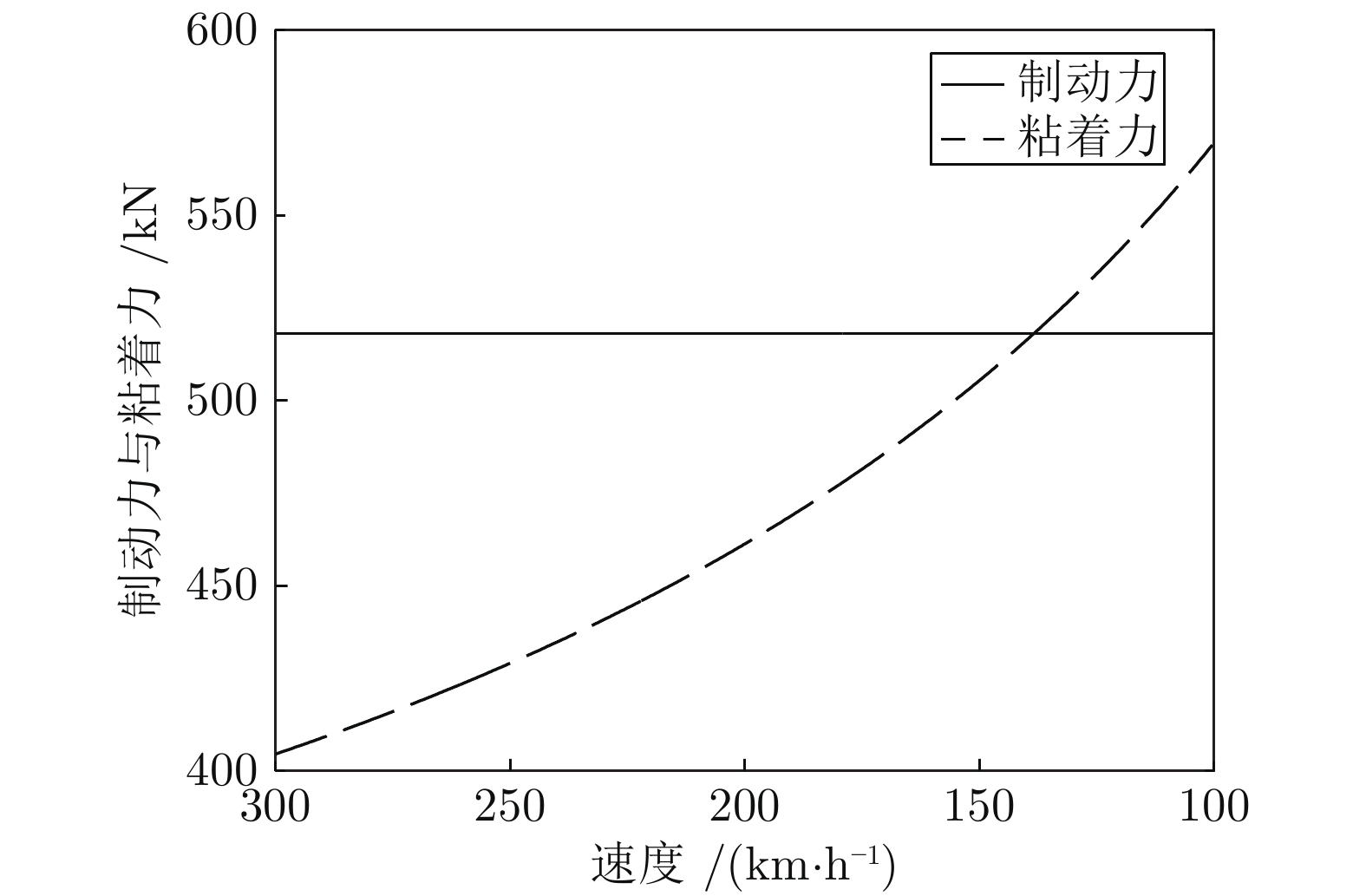
图 2 制动速度 − 轮轨粘着系数
Fig. 2 Braking speed and adhesion coefficient ofwheel-rail from external rail to tunnel rail
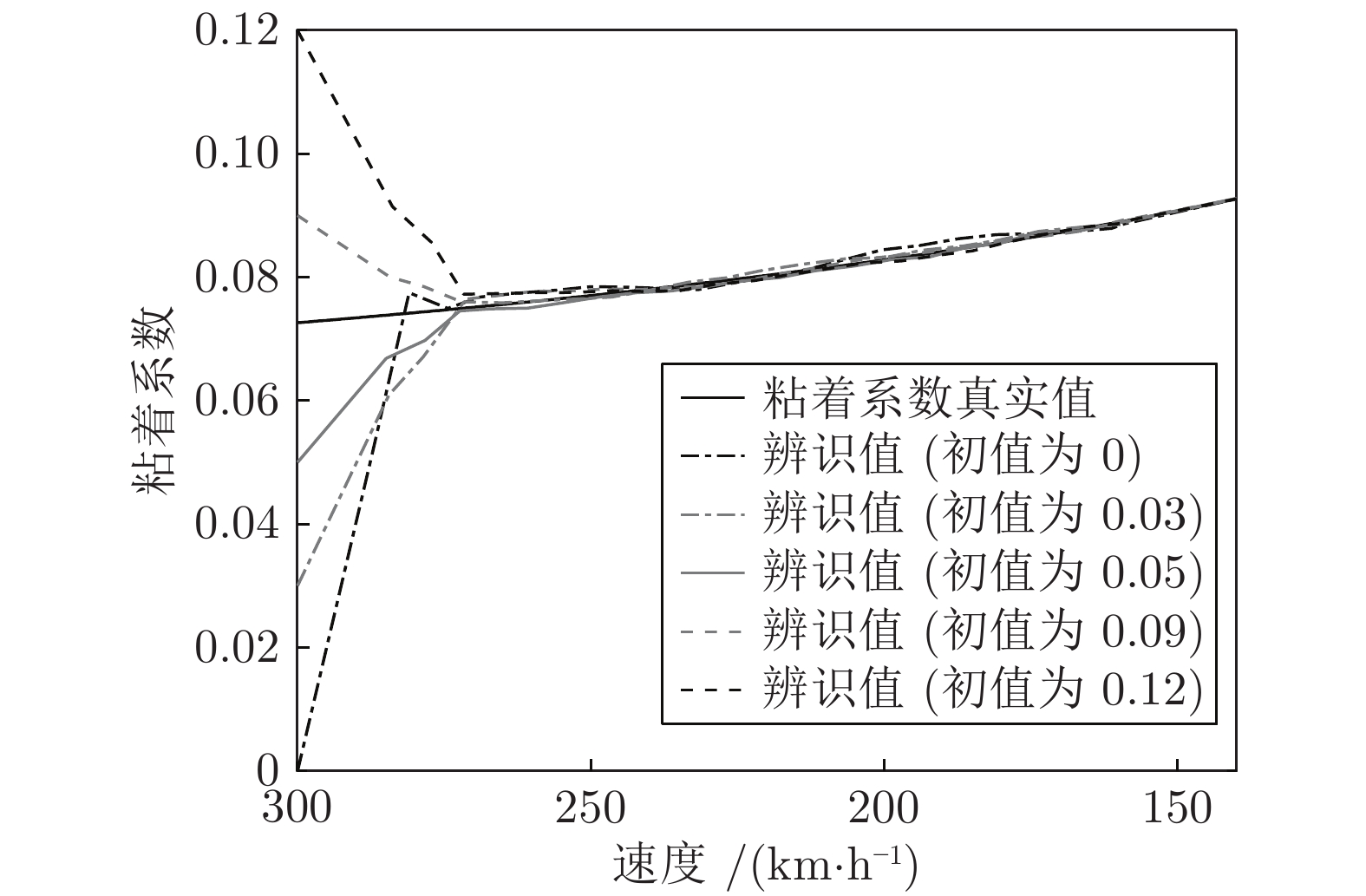
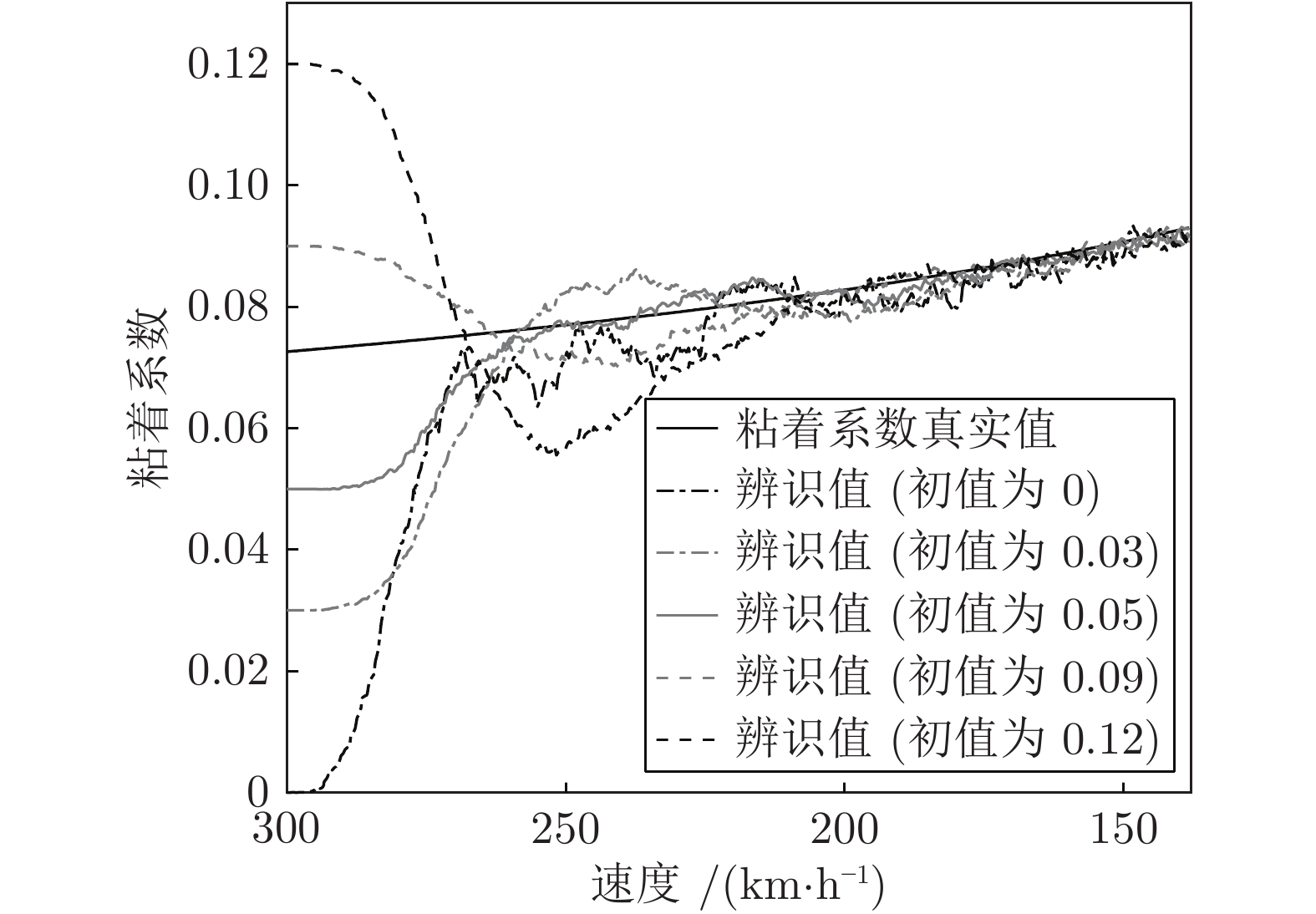
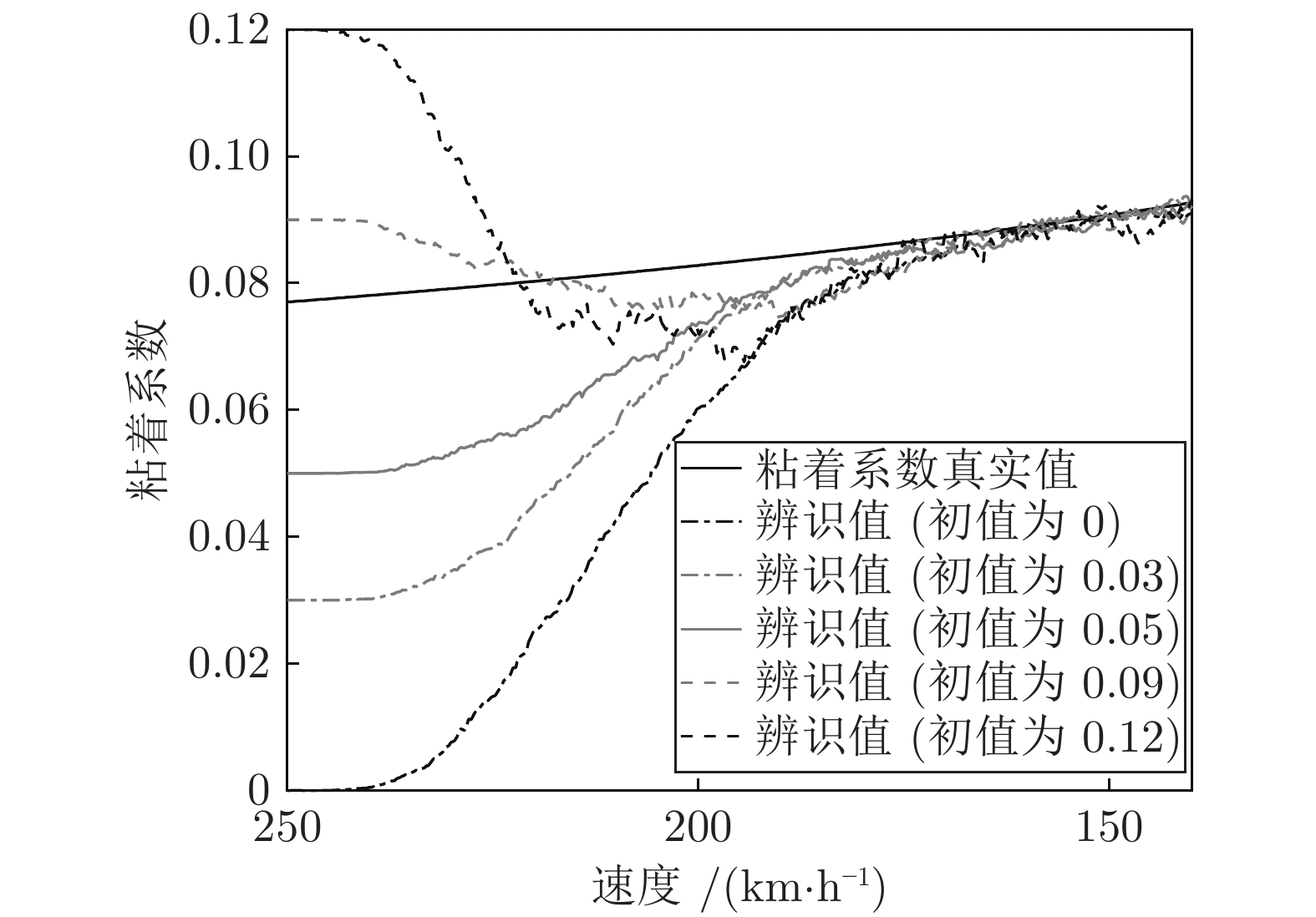
图 4 平道 − 隧道粘着系数实时估计
Fig. 4 Real-time estimation of adhesion coefficient from external rail to tunnel rail
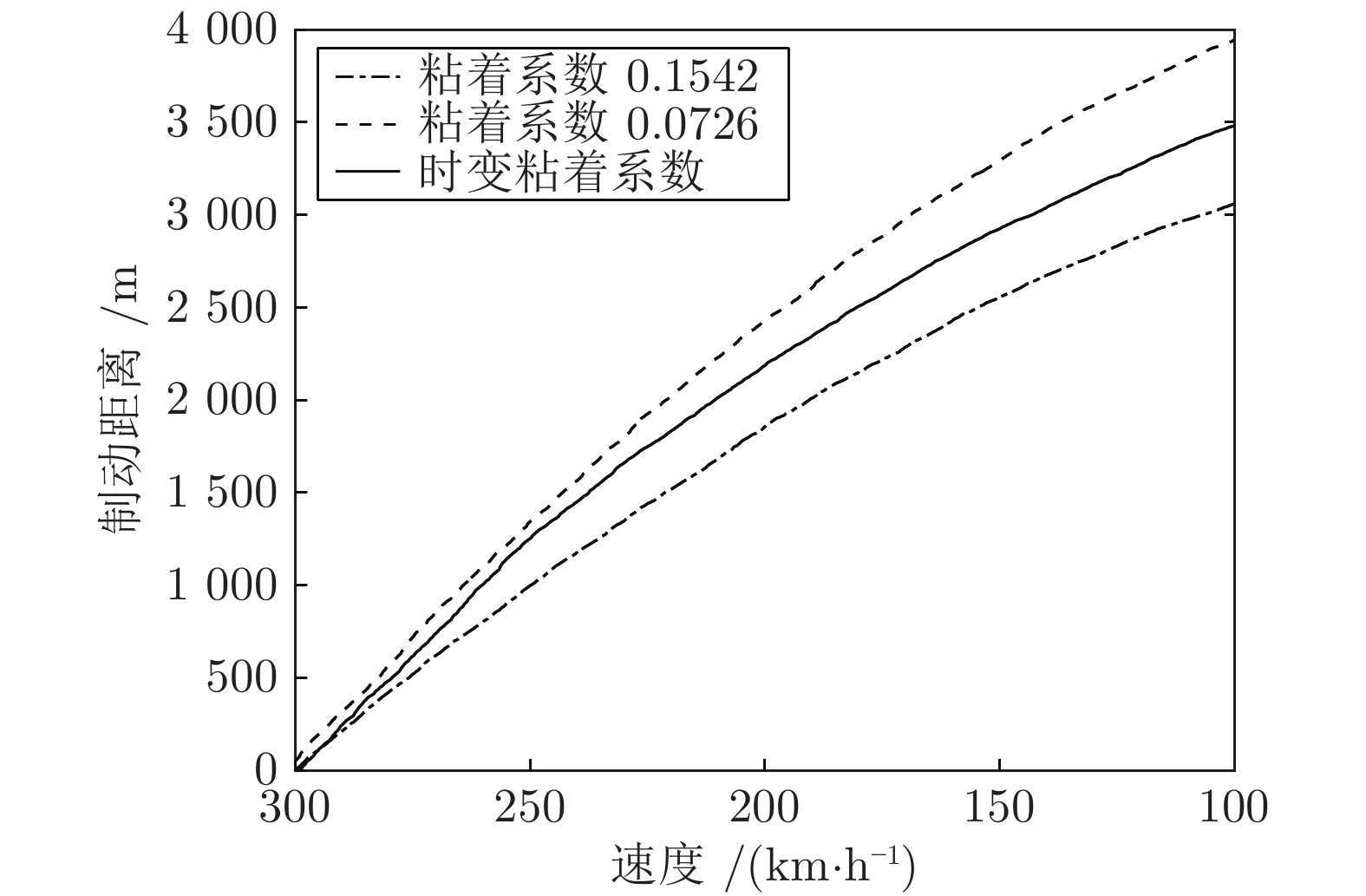
图 10 列车平道 − 隧道制动速度与制动距离
Fig. 10 Braking speed and distance of train fromexternal rail to tunnel rail
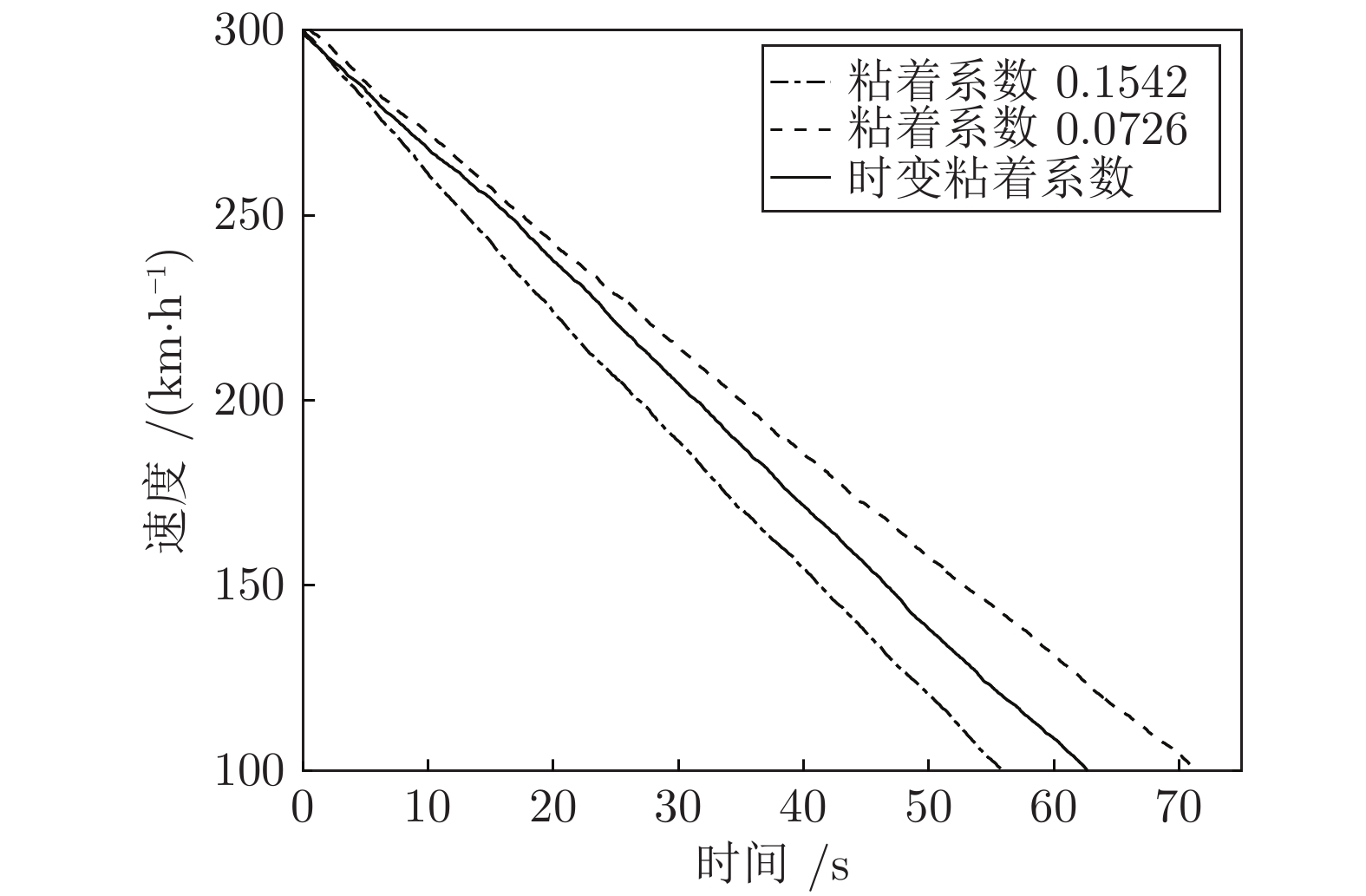
图 11 列车平道 − 隧道制动速度与制动时间
Fig. 11 Train braking speed and braking time fromexternal rail to tunnel rail
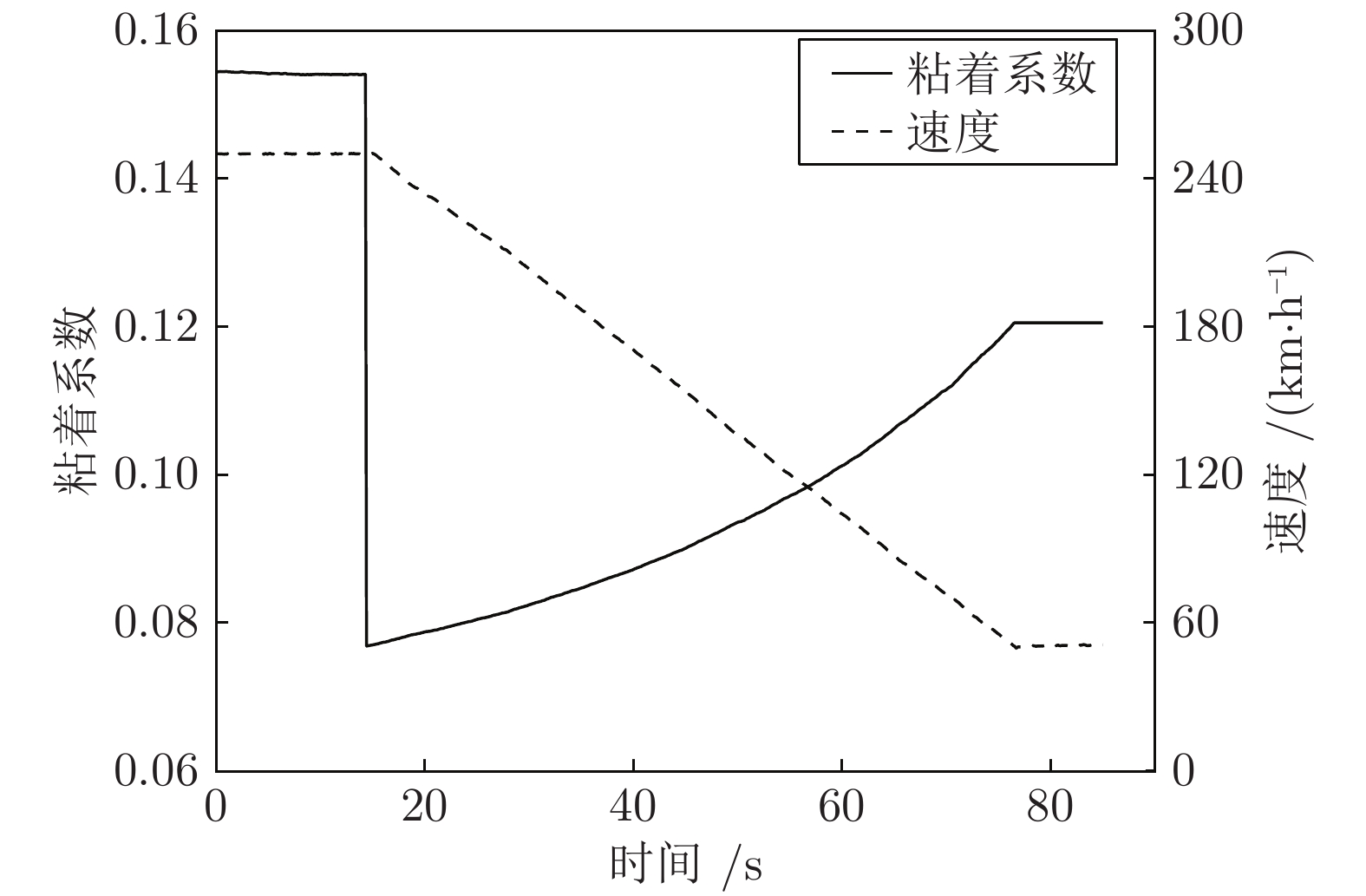
图 12 轮轨隧道 − 平道粘着系数
Fig. 12 Adhesion coefficient of wheel-rail from tunnel rail to external rail

图 14 隧道 − 平道粘着系数实时估计
Fig. 14 Real-time estimation of adhesion coefficient from tunnel rail to external rail
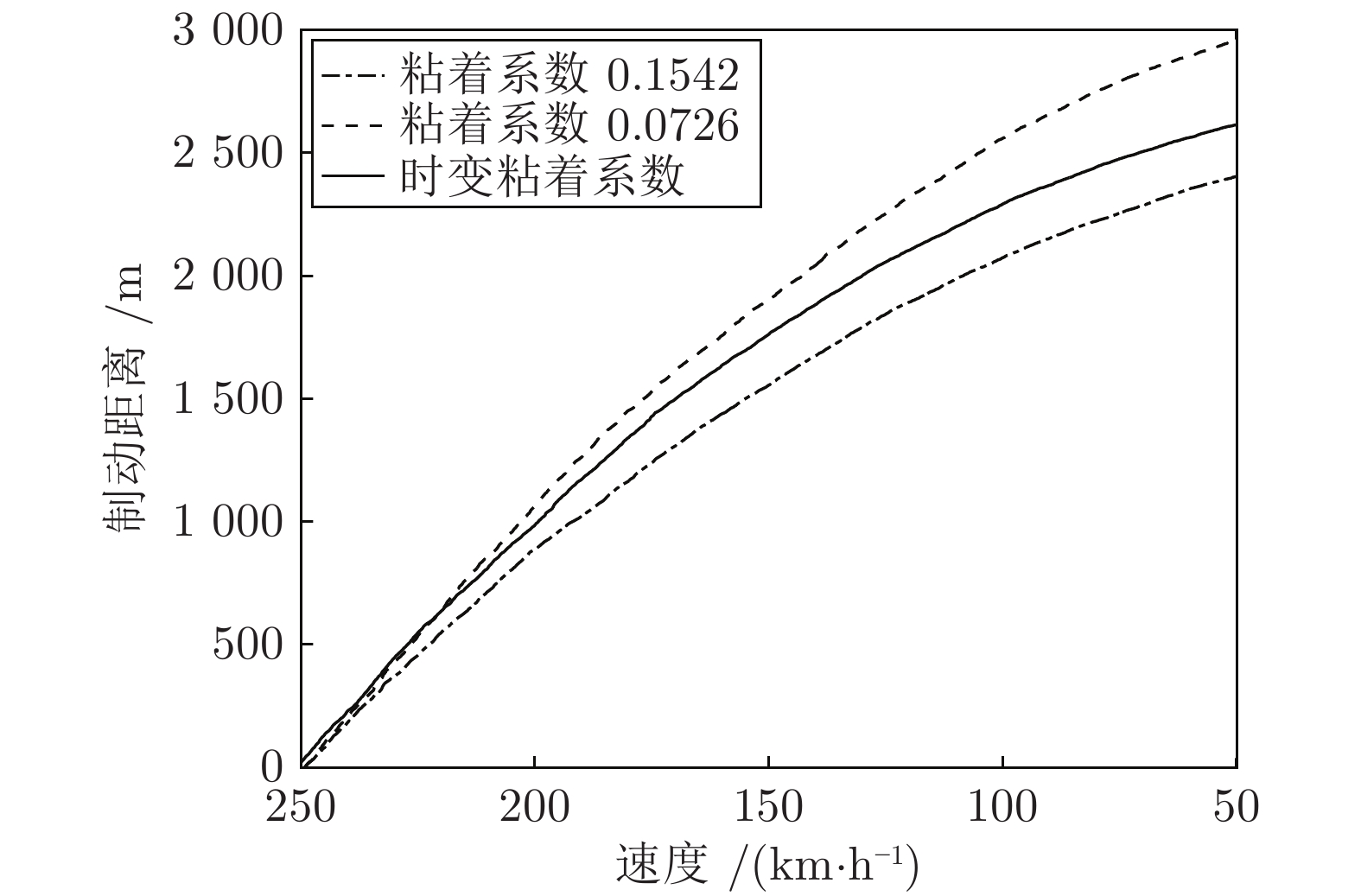
图 20 列车隧道 − 平道制动速度与制动距离
Fig. 20 Braking speed and distance of train fromtunnel rail to external rail
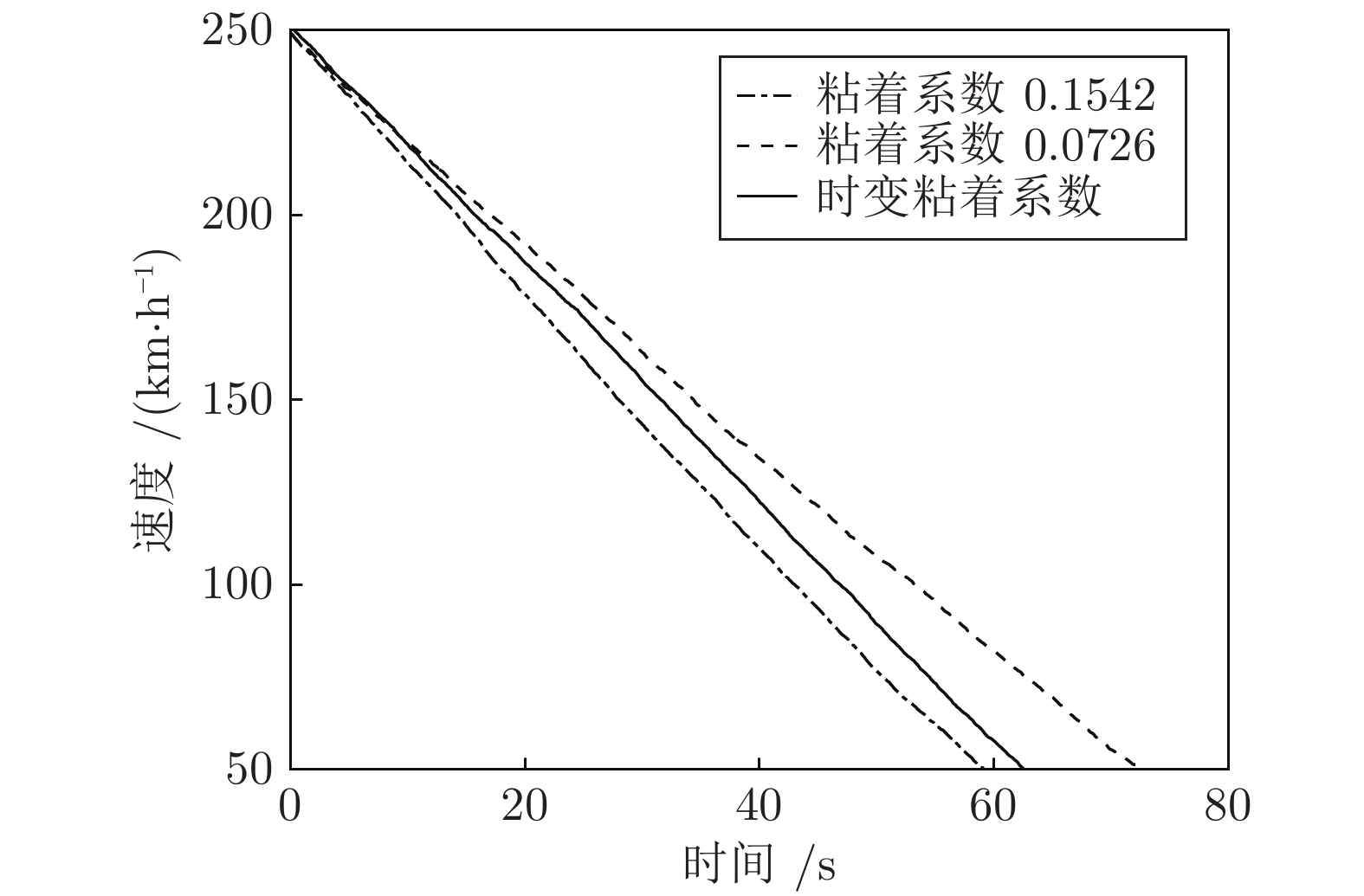
图 21 列车隧道 − 平道制动速度与制动时间
Fig. 21 Braking speed and braking time of train from tunnel rail to external rail
表 1 CRH3紧急制动主要参数特性
Table 1 Main emergency braking parameters of CRH3
参数名称 参数特性 列车总重量 (t) 536 最高运行速度 (km/h) 350 持续运行速度 (km/h) 300 制动缸直径 (mm) 203 制动缸空气压力 (kPa) 410 传动效率 0.85 制动倍率 2.55 制动盘摩擦系数 0.28 制动盘平均摩擦半径 (mm) 297.6 车轮滚动圆半径 (mm) 460  下载: 导出CSV
下载: 导出CSV
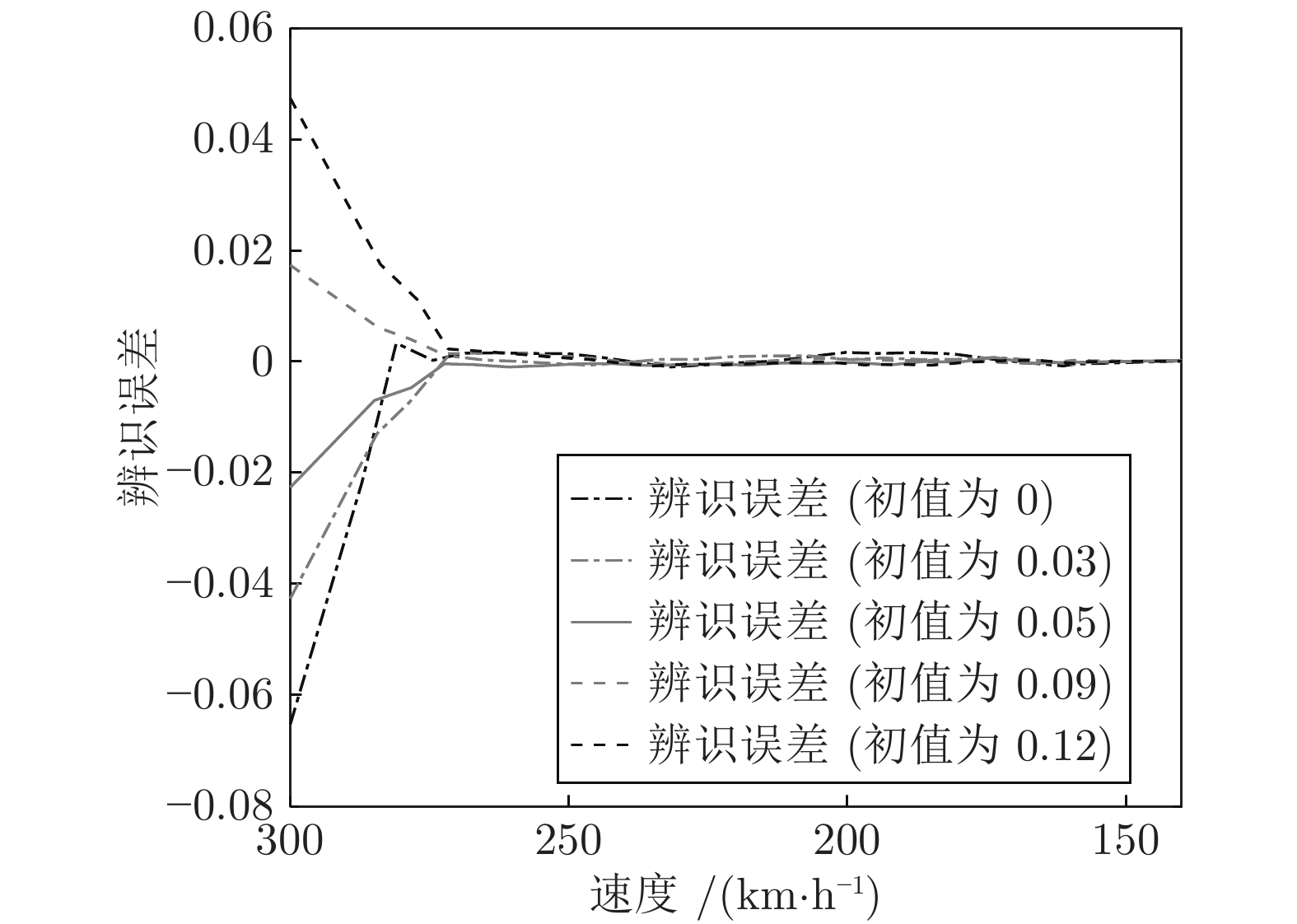
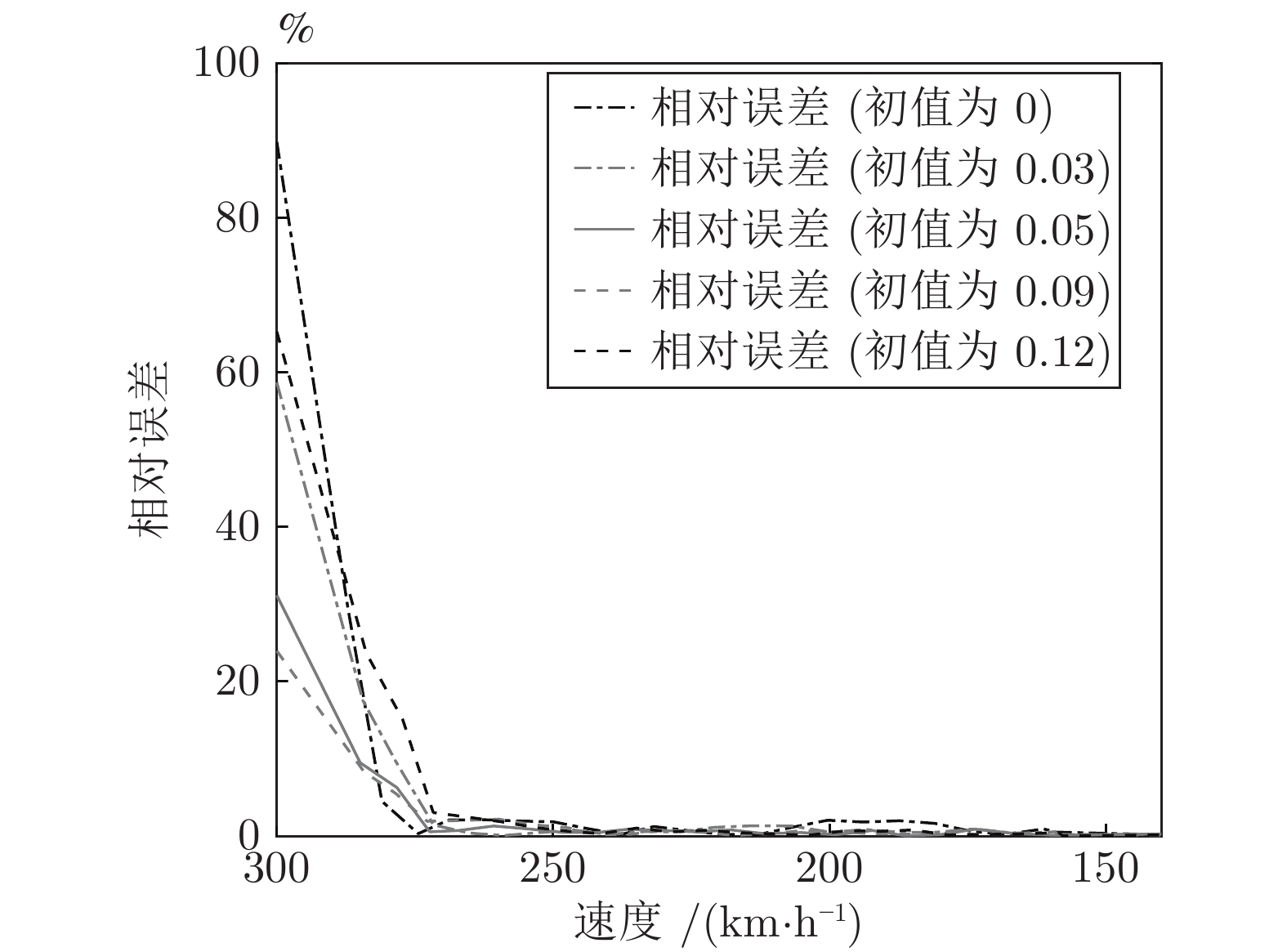
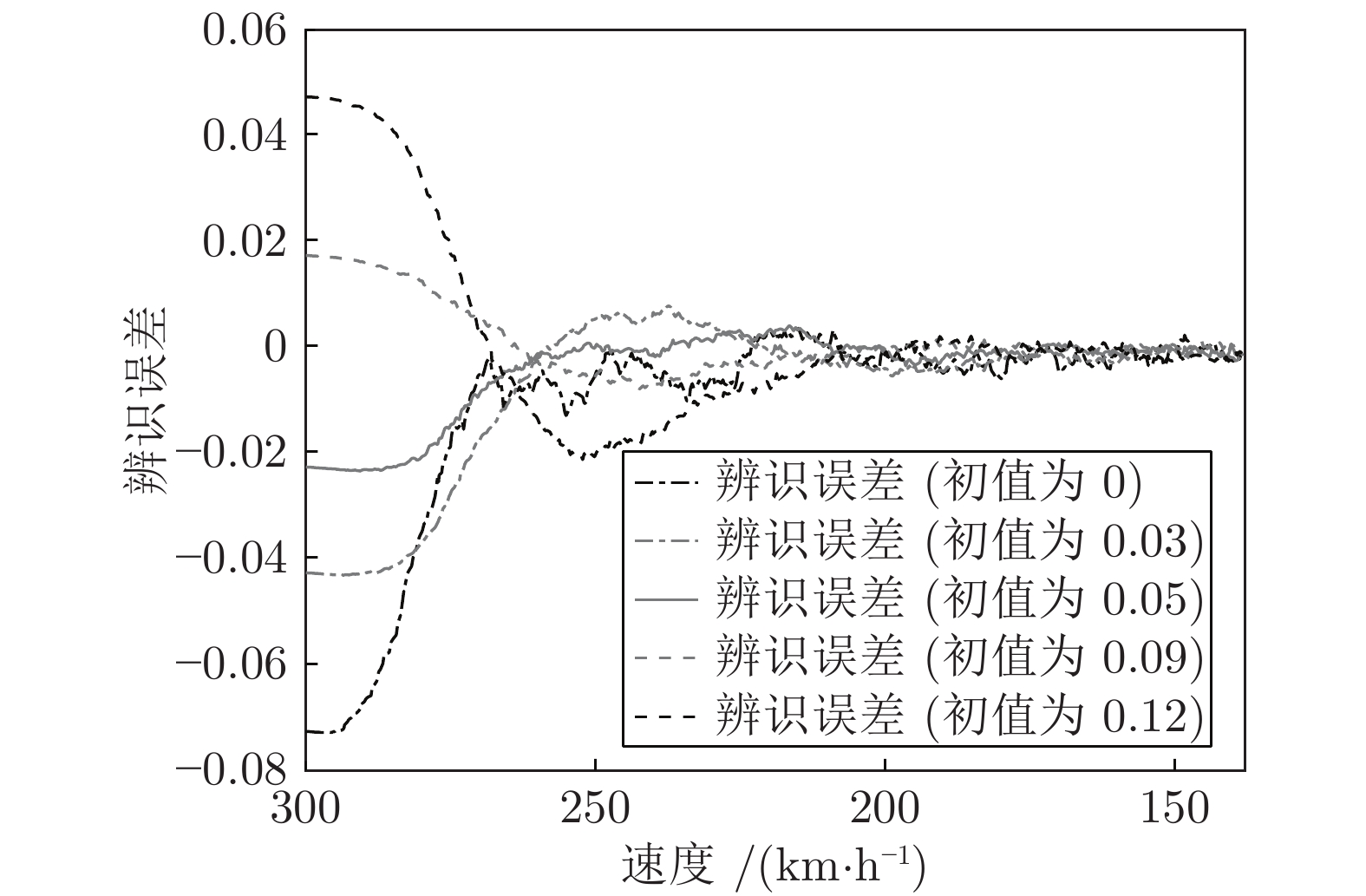
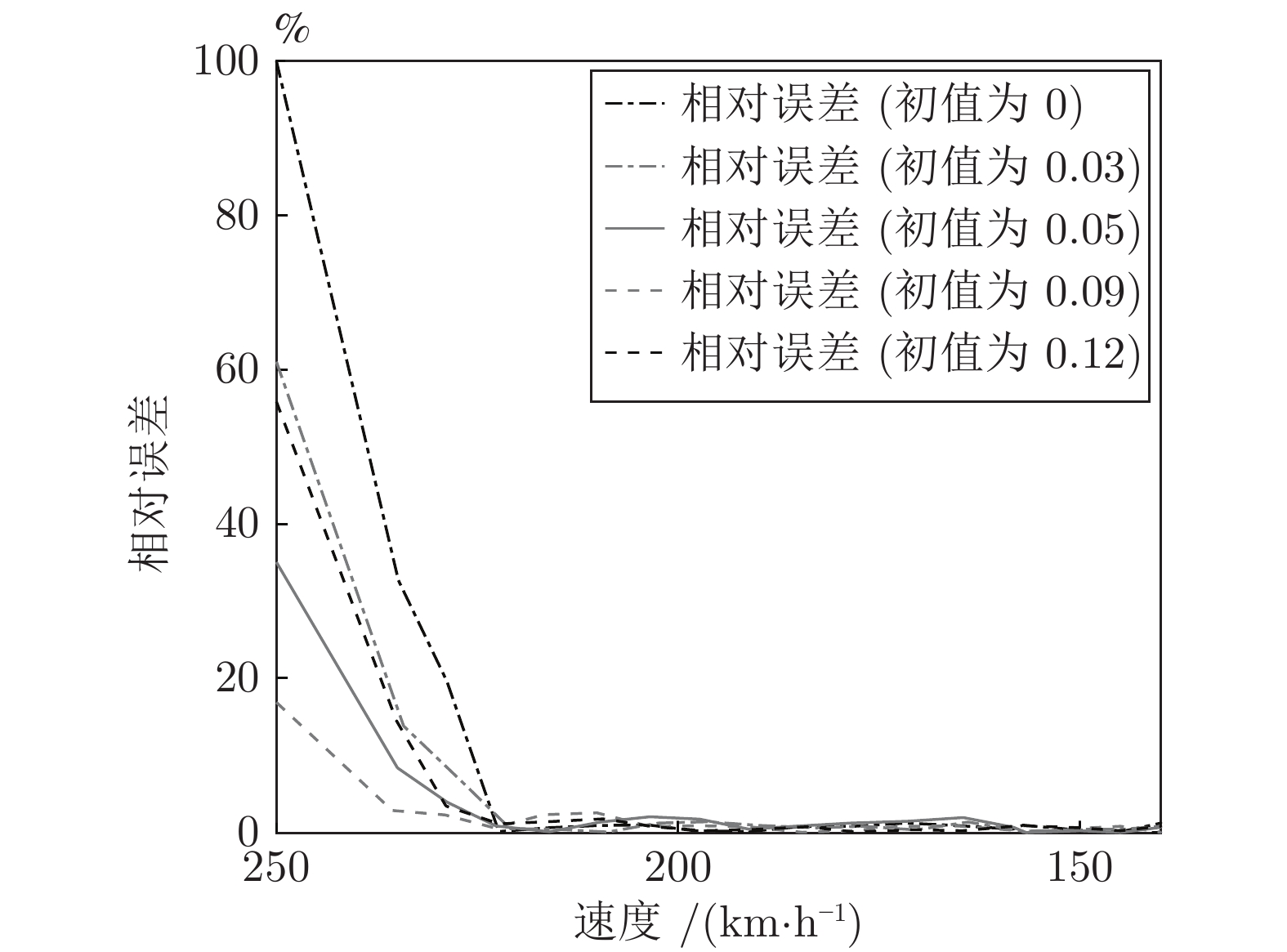
表 2 粘着系数实时估计结果对比
Table 2 Comparison of real-time estimation results of adhesion coefficient
本文方法 EKF 初值 估计误差 相对误差 (%) 估计误差 相对误差 (%) 0.00 $\pm $0.0017 2.0907 $\pm $0.0129 13.7828 0.03 $\pm $0.0011 1.3984 $\pm $0.0078 9.9778 0.05 $\pm $0.0009 1.2802 $\pm $0.0081 10.7114 0.09 $\pm $0.0016 2.1527 $\pm $0.0079 10.1600 0.12 $\pm $0.0023 2.4306 $\pm $0.0137 15.5428 平均值 $\pm $0.0015 1.8705 $\pm $0.0101 12.0350
下载: 导出CSV
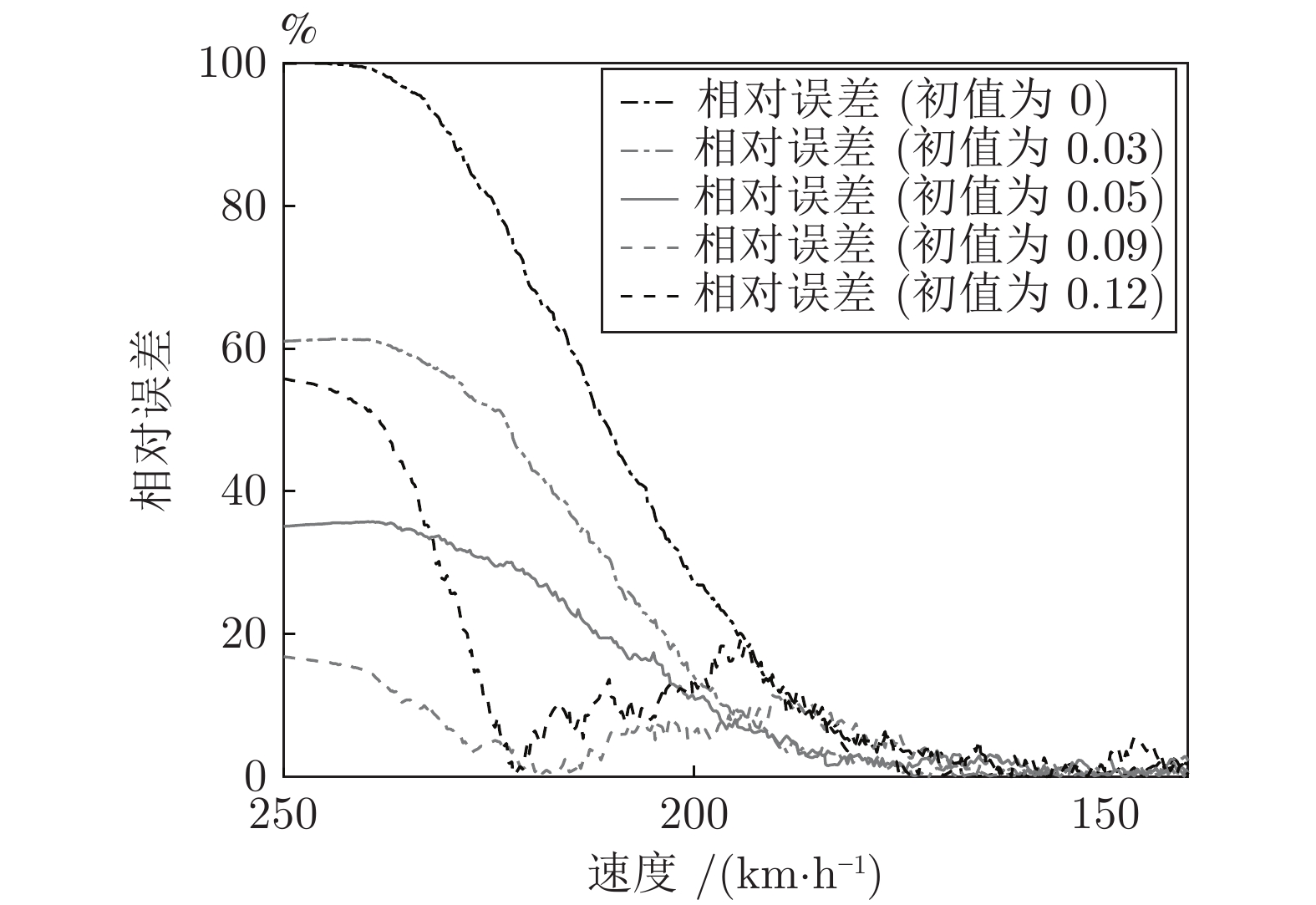
表 3 粘着系数实时估计结果对比
Table 3 Comparison of real-time estimation results of adhesion coefficient
本文方法 EKF 初值 估计误差 相对误差 (%) 估计误差 相对误差 (%) 0.00 $\pm $0.0011 1.2338 $\pm $0.0117 13.8956 0.03 $\pm $0.0012 1.4101 $\pm $0.0120 14.4391 0.05 $\pm $0.0017 2.0780 $\pm $0.0095 11.4757 0.09 $\pm $0.0021 2.5633 $\pm $0.0096 11.4356 0.12 $\pm $0.0015 1.7995 $\pm $0.0121 14.3814 平均值 $\pm $0.0015 1.8169 $\pm $0.0110 13.1255
下载: 导出CSV
-
[1] 1 Hu H X, Tang B, Gong X J. Intelligent fault diagnosis of the high-speed train with big data based on deep neural networks. IEEE Transactions on Industrial Informatics, 2017, 13(4): 2106−2116 doi: 10.1109/TII.2017.2683528 [2] 2 Pan P Y, Hu H T, Yang X W, Blaabjerg F, Wang X F, He Z Y. Impedance measurement of traction network and electric train for stability analysis in high-speed railways. IEEE Transactions on Power Electronics, 2018, 33(12): 10086−10100 doi: 10.1109/TPEL.2018.2836660 [3] 周东华, 纪洪泉, 何潇. 高速列车信息控制系统的故障诊断技术. 自动化学报, 2018, 44(7): 1153−11643 Zhou Dong-Hua, Ji Hong-Quan, He Xiao. Fault diagnosis techniques for the information control system of high-speed trains. Acta Automatica Sinica, 2018, 44(7): 1153−1164 [4] 4 Zhang K P, Jiang B, Tao G. Mimo evolution model-based coupled fault estimation and adaptive control with high-speed train applications. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1552−1566 doi: 10.1109/TCST.2017.2735360 [5] 5 Ning B, Dong H R, Gao S G. Distributed cooperative control of multiple high-speed trains under a moving block system by nonlinear mapping-based feedback. Science China (Information Sciences), 2018, 61(12): 22−33 [6] 6 Dong H R, Gao S G, Ning B. Cooperative control synthesis and stability analysis of multiple trains under moving signaling systems. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2730−2738 doi: 10.1109/TITS.2016.2518649 [7] 7 Song Q, Song Y D, Tang T. Computationally inexpensive tracking control of high-speed trains with traction/braking saturation. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1116−1125 doi: 10.1109/TITS.2011.2143409 [8] 8 Song Y D, Song Q, Cai W C. Fault-tolerant adaptive control of high-speed trains under traction/braking failures: a virtual parameter-based approach. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2): 737−748 doi: 10.1109/TITS.2013.2290310 [9] 9 Su S, Tang T, Roberts C. A cooperative train control model for energy saving. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 622−631 doi: 10.1109/TITS.2014.2334061 [10] 10 Song Q, Song Y D. Data-based fault-tolerant control of high-speed trains with traction/braking notch nonlinearities and actuator failures. IEEE Transactions on Neural Networks, 2011, 22(12): 2250−2261 doi: 10.1109/TNN.2011.2175451 [11] 郭红戈, 谢克明. 动车组列车制动系统的 Hammerstein 模型及其参数辨识方法. 铁道学报, 2014, 36(4): 48−53 doi: 10.3969/j.issn.1001-8360.2014.04.00911 Guo Hong-Ge, Xie Ke-Ming. Hammerstein model and parameters identification of EMU braking system. Journal of the China Railway Society, 2014, 36(4): 48−53 doi: 10.3969/j.issn.1001-8360.2014.04.009 [12] 12 Ding F, Xu L, Alsaadi F E. Iterative parameter identification for pseudo-linear systems with ARMA noise using the filtering technique. Iet Control Theory and Applications, 2018, 12(7): 892−899 doi: 10.1049/iet-cta.2017.0821 [13] 13 Ding F, Liu X G, Chu J. Gradient-based and least-squares-based iterative algorithms for Hammerstein systems using the hierarchical identification principle. Iet Control Theory and Applications, 2013, 7(2): 176−184 doi: 10.1049/iet-cta.2012.0313 [14] 14 Chon T B, Wills A, Ninness B. System identification of nonlinear state-space models. Automatica, 2011, 47(1): 39−49 doi: 10.1016/j.automatica.2010.10.013 [15] 15 Ding F, Liu G, Liu X P. Parameter estimation with scarce measurements. Automatica, 2011, 47(8): 1646−1655 doi: 10.1016/j.automatica.2011.05.007 [16] 16 Ding F, Wang F F, Xu L. Parameter estimation for pseudo-linear systems using the auxiliary model and the decomposition technique. IET Control Theory and Applications, 2017, 11(3): 390−400 doi: 10.1049/iet-cta.2016.0491 [17] 17 Ding F, Chen T W. Performance analysis of multi-innovation gradient type identification methods. Automatica, 2007, 43(1): 1−14 doi: 10.1016/j.automatica.2006.07.024 [18] 18 Ma P, Ding F, Zhu Q M. Decomposition-based recursive least squares identification methods for multivariate pseudo-linear systems using the multi-innovation. International Journal of Systems Science, 2018, 49(5): 920−928 doi: 10.1080/00207721.2018.1433247 [19] 19 Ding F, Chen T. Hierarchical gradient-based identification of multivariable discrete-time systems. Automatica, 2005, 41(2): 315−325 doi: 10.1016/j.automatica.2004.10.010 [20] 20 Zhang X, Ding F, Xu L. State filtering-based least squares parameter estimation for bilinear systems using the hierarchical identification principle. IET Control Theory and Applications, 2018, 12(12): 1704−1713 doi: 10.1049/iet-cta.2018.0156 [21] 21 Ding F, Liu G J, Liu X P. Partially coupled stochastic gradient identification methods for non-uniformly sampled systems. IEEE Transactions on Automatic Control, 2010, 55(8): 1976−1981 doi: 10.1109/TAC.2010.2050713 [22] 22 Wang X, Ding F. Partially coupled extended stochastic gradient algorithm for nonlinear multivariable output error moving average systems. Engineering Computations, 2017, 34(2): 629−647 doi: 10.1108/EC-05-2015-0126 [23] 衷路生, 李兵, 龚锦红. 高速列车非线性模型的极大似然辨识. 自动化学报, 2014, 40(12): 2950−295823 Zhong Lu-Sheng, Li Bing, Gong Jin-Hong. Maximum likelihood identification of nonlinear model for high-speed train. Acta Automatica Sinica, 2014, 40(12): 2950−2958 [24] 谢国, 张丹, 黑新宏. 高速列车纵向动力学模型时变参数在线辨识方法. 交通运输工程学报, 2017, 17(1): 71−81 doi: 10.3969/j.issn.1671-1637.2017.01.00924 Xie Guo, Zhang Dan, Hei Xin-Hong. Online identification method of time-varying parameters for longitudinal dynamics model of high-speed train. Journal of Traffic and Transportation Engineering, 2017, 17(1): 71−81 doi: 10.3969/j.issn.1671-1637.2017.01.009 [25] 25 Noh S J, Shim D, Jeon M. Adaptive sliding-window strategy for vehicle detection in highway environments. Adaptive Sliding-Window Strategy for Vehicle Detection in Highway Environments, 2016, 17(2): 323−335 [26] 26 Shakil S, Billings J C, Keiholz S D. Parametric dependencies of sliding window correlation. IEEE Transactions on Biomedical Engineering, 2018, 65(2): 254−263 doi: 10.1109/TBME.2017.2762763 [27] 27 Zhang Y Q, Lou Y C, Hong Y G. An approximate gradient algorithm for constrained distributed convex optimization. IEEE/CAA Journal of Automatica Sinica, 2015, 1(1): 61−67 期刊类型引用(44)
1. 吴雨瑶,李雪芳,刘万泉. 全驱刚体航天器的预定时间姿态跟踪控制. 控制与决策. 2025(02): 469-478 .  百度学术
百度学术2. 郭宗易,韩永麟,郭建国,胡冠杰. 基于正系统分析的不确定非线性系统性能驱动控制方法. 自动化学报. 2025(01): 133-143 . 本站查看3. 段广仁. 亚严反馈系统镇定的全驱系统方法. 航空学报. 2024(01): 8-19+3 . 百度学术4. 鲁明,陈雪芹,吴凡,曹喜滨. 基于二阶全驱系统的航天器姿态避障控制. 航空学报. 2024(01): 101-109 . 百度学术5. 杨梓霄,李世尧,魏晨,李湛,朱波. 基于低阶干扰估计器的欠驱动三自由度直升机鲁棒控制. 航空学报. 2024(01): 150-165 . 百度学术6. 方乐言,蒙晗,侯明哲. 带有参数精确估计的迭代学习滑模控制及应用. 航空学报. 2024(01): 166-180+3 . 百度学术7. 张清瑞,刘赟韵,孙慧杰,朱波. 固定翼无人机紧密编队的鲁棒协同跟踪控制. 航空学报. 2024(01): 110-126 . 百度学术8. Guang-Ren DUAN. A FAS approach for stabilization of generalized chained forms: part 1. Discontinuous control laws. Science China(Information Sciences). 2024(02): 118-143 . 必应学术9. 蔡光斌,肖永强,胡昌华,杨小冈,凡永华. 基于全驱系统方法的高阶严反馈系统时变输出约束控制. 自动化学报. 2024(02): 372-385 . 本站查看10. Guang-Ren DUAN. A FAS approach for stabilization of generalized chained forms: part 2. Continuous control laws. Science China(Information Sciences). 2024(03): 114-135 . 必应学术11. Zhongcai Zhang,Guangren Duan. Stabilization Controller of An Extended Chained Nonholonomic System With Disturbance:An FAS Approach. IEEE/CAA Journal of Automatica Sinica. 2024(05): 1262-1273 . 必应学术12. Wei Wang,Yuchen Wang,Shiwei Chen,Yongcang Guo,Zhongjiao Shi. Observer-based robust high-order fully actuated attitude autopilot design for spinning glide-guided projectiles. Defence Technology. 2024(04): 282-294 . 必应学术13. 余培照,李孟孟,王闯. 基于特征结构配置的奇异振动系统鲁棒镇定. 河南理工大学学报(自然科学版). 2024(04): 152-161 . 百度学术14. 郑雪梅,郅济荣,张星宇,李其恩. 全驱系统理论在LCL并网逆变器中的控制及应用. 长春工业大学学报. 2024(02): 125-129 . 百度学术15. 李雪芳,李晓东,刘万泉. 自适应迭代学习控制的发展现状与展望. 控制理论与应用. 2024(09): 1523-1538 . 百度学术16. 蔡陈生,朱庆华,唐育聪,张彦权. 基于多场耦合建模的航天器控制与仿真技术研究. 空间控制技术与应用. 2024(05): 84-91 . 百度学术17. 王典,吴云华,岳程斐,马松靖. 输入受限的挠性航天器全驱姿态饱和控制. 自动化学报. 2024(11): 2177-2187 . 本站查看18. 宁文慧,高铭,吕荣平,张中才. 基于扩张状态观测器的非完整系统的镇定控制:一种全驱系统方法. 指挥与控制学报. 2024(05): 620-627 . 百度学术19. 陈洋,张丹丹,章智凯,张恒. 不确定严格反馈系统的无反步预设性能自适应控制:一种全驱系统方法的设计. 信息与控制. 2024(06): 774-782+792 . 百度学术20. Guangren DUAN. Fully actuated system approaches for continuous-time delay systems: part 1. Systems with state delays only. Science China(Information Sciences). 2023(01): 158-187 . 必应学术21. Guangren DUAN. Fully actuated system approaches for continuous-time delay systems: part 2. Systems with input delays. Science China(Information Sciences). 2023(02): 158-175 . 必应学术22. PENG Kai,WANG Hongxia,ZHANG Huanshui,ZHANG Zhaorong,YANG Fan. Multivariable Decoupling Control of Civil Turbofan Engines Based on Fully Actuated System Approach. Journal of Systems Science & Complexity. 2023(03): 947-959 . 必应学术23. DUAN Guang-Ren. Brockett's Second Example: A FAS Approach Treatment. Journal of Systems Science & Complexity. 2023(05): 1789-1808 . 必应学术24. Feng Zhang,Guangren Duan. Coupled Dynamics and Integrated Control for Position and Attitude Motions of Spacecraft: A Survey. IEEE/CAA Journal of Automatica Sinica. 2023(12): 2187-2208 . 必应学术25. 蔺凤琴,刘文可,于鹏. 基于全驱系统方法的冷带轧机压下系统自适应同步控制. 系统科学与数学. 2023(11): 2758-2772 . 百度学术26. 刘国平. 具有时变通信受限非线性信息物理系统的网络化预测控制. 控制理论与应用. 2022(01): 145-153 . 百度学术27. DUAN Guang-Ren. Brockett's First Example: An FAS Approach Treatment. Journal of Systems Science & Complexity. 2022(02): 441-456 . 必应学术28. WANG Na,LIU Xiaoping,LIU Cungen,WANG Huanqing,ZHOU Yucheng. Almost Disturbance Decoupling for HOFA Nonlinear Systems with Strict-Feedback Form. Journal of Systems Science & Complexity. 2022(02): 481-501 . 必应学术29. ZHAO Yuzhuo,MA Dan,MA Hongwei. Adaptive Neural Network Control of Thermoacoustic Instability in Rijke Tube: A Fully Actuated System Approach. Journal of Systems Science & Complexity. 2022(02): 586-603 . 必应学术30. DUAN Guang-Ren. Stabilization via Fully Actuated System Approach: A Case Study. Journal of Systems Science & Complexity. 2022(03): 731-747 . 必应学术31. GU Dake,WANG Shuo. A High-Order Fully Actuated System Approach for a Class of Nonlinear Systems. Journal of Systems Science & Complexity. 2022(02): 714-730 . 必应学术32. WU Si,LIU Tengfei. Safety Control of a Class of Fully Actuated Systems Subject to Uncertain Actuation Dynamics. Journal of Systems Science & Complexity. 2022(02): 543-558 . 必应学术33. NING Pengju,HUA Changchun,MENG Rui. Adaptive Control for a Class of Nonlinear Time-Delay System Based on the Fully Actuated System Approaches. Journal of Systems Science & Complexity. 2022(02): 522-534 . 必应学术34. ZHAO Qin,DUAN Guang-Ren. Fully Actuated System Approach for 6DOF Spacecraft Control Based on Extended State Observer. Journal of Systems Science & Complexity. 2022(02): 604-622 . 必应学术35. SUN Hao,HUANG Ling,HE Liang. Research on the Trajectory Tracking Control of a 6-DOF Manipulator Based on Fully-Actuated System Models. Journal of Systems Science & Complexity. 2022(02): 641-659 . 必应学术36. WU Ai-Guo,ZHANG Jie,JI Youzhou. A Fully Actuated System Approach for Stabilization of Discrete-Time Multiple-Input Nonlinear Systems with Distinct Input Delays. Journal of Systems Science & Complexity. 2022(02): 670-687 . 必应学术37. DUAN Guangquan,LIU Guo-Ping. Attitude and Orbit Optimal Control of Combined Spacecraft via a Fully-Actuated System Approach. Journal of Systems Science & Complexity. 2022(02): 623-640 . 必应学术38. Guangren DUAN. Discrete-time delay systems: part 1. Global fully actuated case. Science China(Information Sciences). 2022(08): 87-104 . 必应学术39. Guangren DUAN. Discrete-time delay systems: part 2. Sub-fully actuated case. Science China(Information Sciences). 2022(09): 145-159 . 必应学术40. Tianyi ZHAO,Guang-Ren DUAN. Fully actuated system approach to attitude control of flexible spacecraft with nonlinear time-varying inertia. Science China(Information Sciences). 2022(11): 148-162 . 必应学术41. DUAN Guang-Ren,ZHOU Bin. Fully Actuated System Approach for Linear Systems Control: A Frequency-Domain Solution. Journal of Systems Science & Complexity. 2022(06): 2046-2061 . 必应学术42. 曹湛昕,古宇达,周延周. 光栅尺的I-Q平衡式光电编码与解码方法. 广东工业大学学报. 2021(03): 42-47 . 百度学术43. 段广仁. 高阶系统方法——Ⅱ.能控性与全驱性. 自动化学报. 2020(08): 1571-1581 . 本站查看44. 段广仁. 高阶系统方法——Ⅲ.能观性与观测器设计. 自动化学报. 2020(09): 1885-1895 . 本站查看其他类型引用(30)
-

 下载:
下载:
















































































































































































































计量
- 文章访问数: 3021
- HTML全文浏览量: 788
- PDF下载量: 279
- 被引次数: 74
