

Adaptive Identification of Time-varying Environmental Parameters in Train Dynamics Model
-
摘要: 考虑列车制动性能与制动距离对列车安全的重要影响, 分析了列车运行的动力学特性, 构建了列车离散化制动模型,并针对影响列车制动性能的关键参数 — 钢轨粘着系数难以直接观测、随钢轨环境变化的特点, 提出基于滑动窗口与最大期望理论的轮轨粘着系数在线辨识算法. 首先, 依据数据特征确定滑动窗口位置与窗口尺寸; 然后, 构造列车动力学模型参数的条件数学期望, 并结合粒子滤波与粒子平滑算法以及贝叶斯理论, 估计预设模型参数下的列车运行状态; 在此基础上, 分析粘着系数的后验概率, 并极大化条件数学期望对模型参数预设进行优化更新, 进而实现模型真实参数的逐步逼近. 最后, 考虑雪地、隧道等场景下的粘着系数变化, 对本文方法进行了仿真验证, 并数值分析了粘着系数对制动距离的影响. 仿真结果表明本文算法可快速、准确地对粘着系数进行实时辨识, 掌握轮轨间实时粘着状态.Abstract: Considering the braking performance and distance on train safety, the dynamic characteristics of train are analyzed, and the discrete braking model is constructed. Aiming at the pivotal rail-wheel adhesion coefficient, which is difficult to be observed directly and varies with rail environment, an online identification of adhesion coefficient based on sliding window and expectation maximization is proposed. Firstly, the position and size of window are set up. Then, the conditional expectation about the parametric train dynamic model is constructed, and the train running state under the preset parameters is estimated by the particle filter, particle smoothing and Bayesian theory. On this basis, the posterior probability of the adhesion coefficient is analyzed, and the conditional expectation is maximized to optimize and update the model parameters, so that the real parameters can be approached step by step. Finally, considering the change of adhesion coefficient in snow, tunnel and other scenes, the method is simulated and validated, and the influence of adhesion coefficient on braking distance is analyzed numerically. The simulation results show that the adhesion coefficient can be identified quickly and accurately, and the real-time adhesion state can be grasped in real time.
-
Key words:
- Adhesion coefficient /
- braking model /
- expectation maximization /
- sliding window /
- parameter estimation
1) 收稿日期 2019-03-20 录用日期 2019-09-09 Manuscript received March 20, 2019; accepted September 9, 2019 国家重点研发计划 (2018YFB1201500), 国家自然科学基金 (61873201, 61773313), 北京市自然科学基金 (4192046) 资助 Supported by National Key Research and Development Program of China (2018YFB1201500), National Natural Science Foundation of China (61873201, 61773313), and Beijing Municipal Natural Science Foundation (4192046) 本文责任编委 吕宜生 Recommended by Associate Editor LV Yi-Sheng 1. 西安理工大学 西安 710048, 中国 2. 北京交通大学 北京 100044, 中国 3. 日本大学 船桥 274-8501, 日本 1. Xi'an University of Technology, Xi'an 710048, China 2. Bei2) jing Jiaotong University, Beijing 100044, China 3. Nihon University, Fun-abashi 274-8501, Japan -
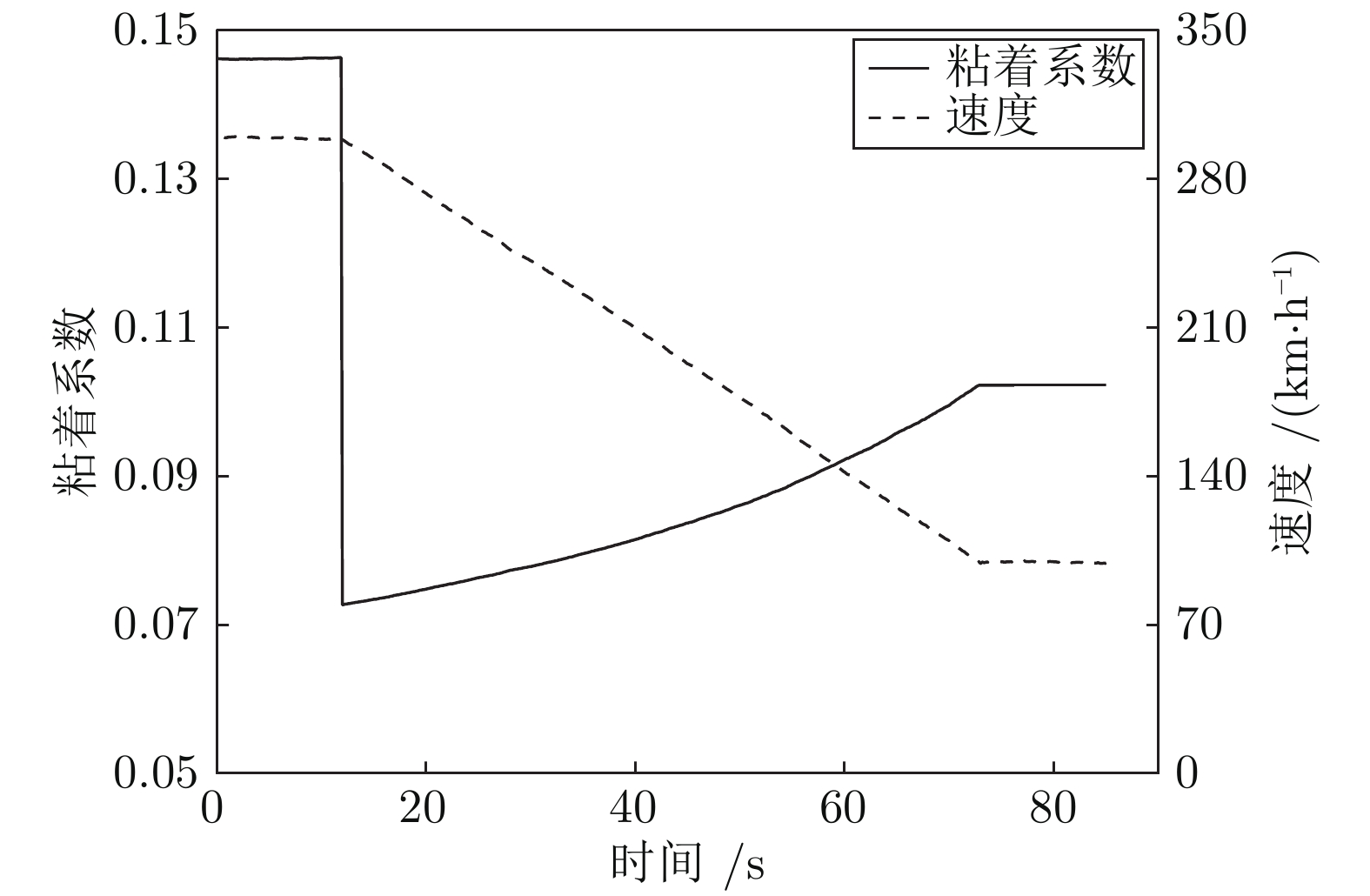
图 2 制动速度 − 轮轨粘着系数
Fig. 2 Braking speed and adhesion coefficient ofwheel-rail from external rail to tunnel rail
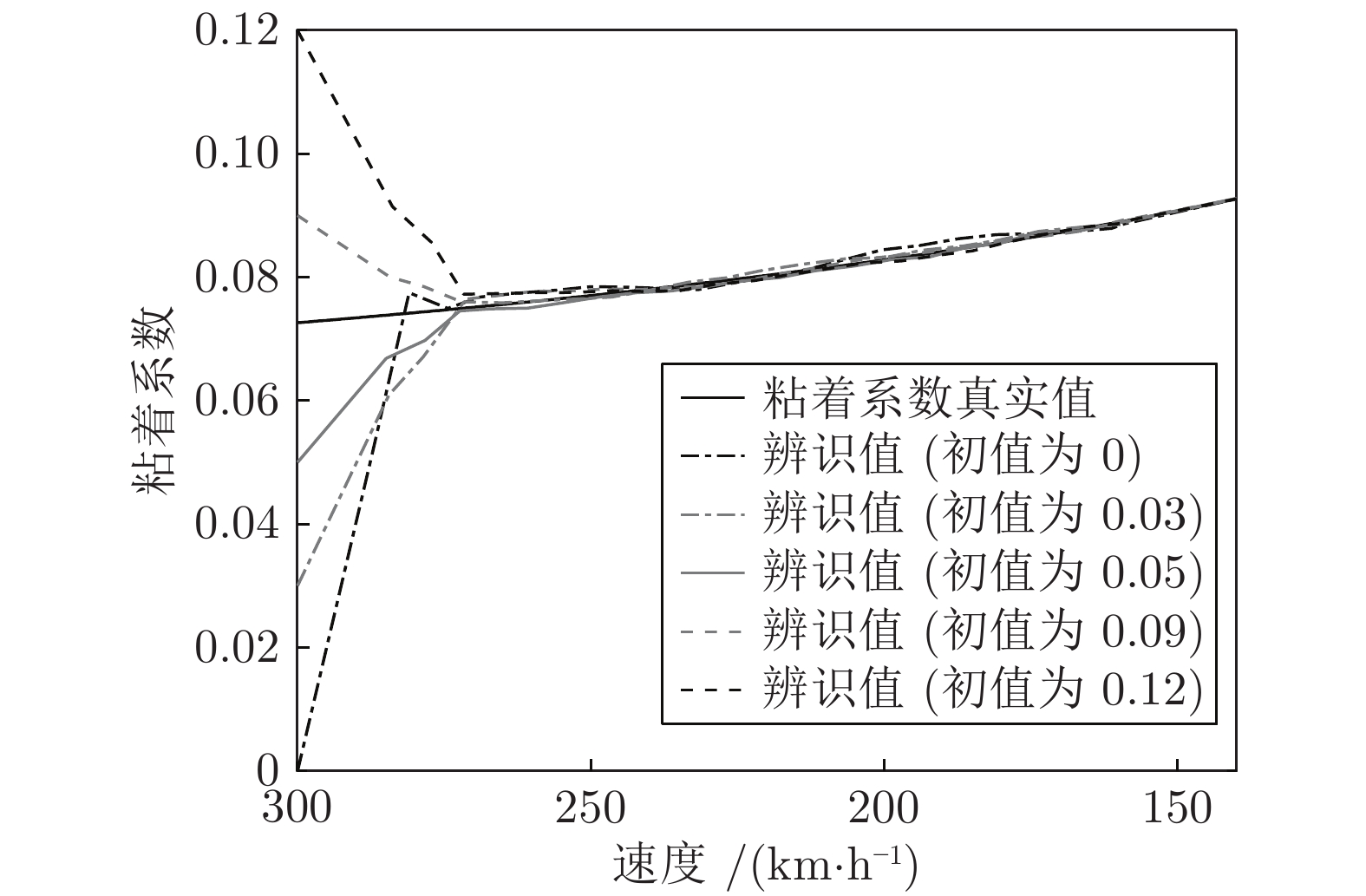
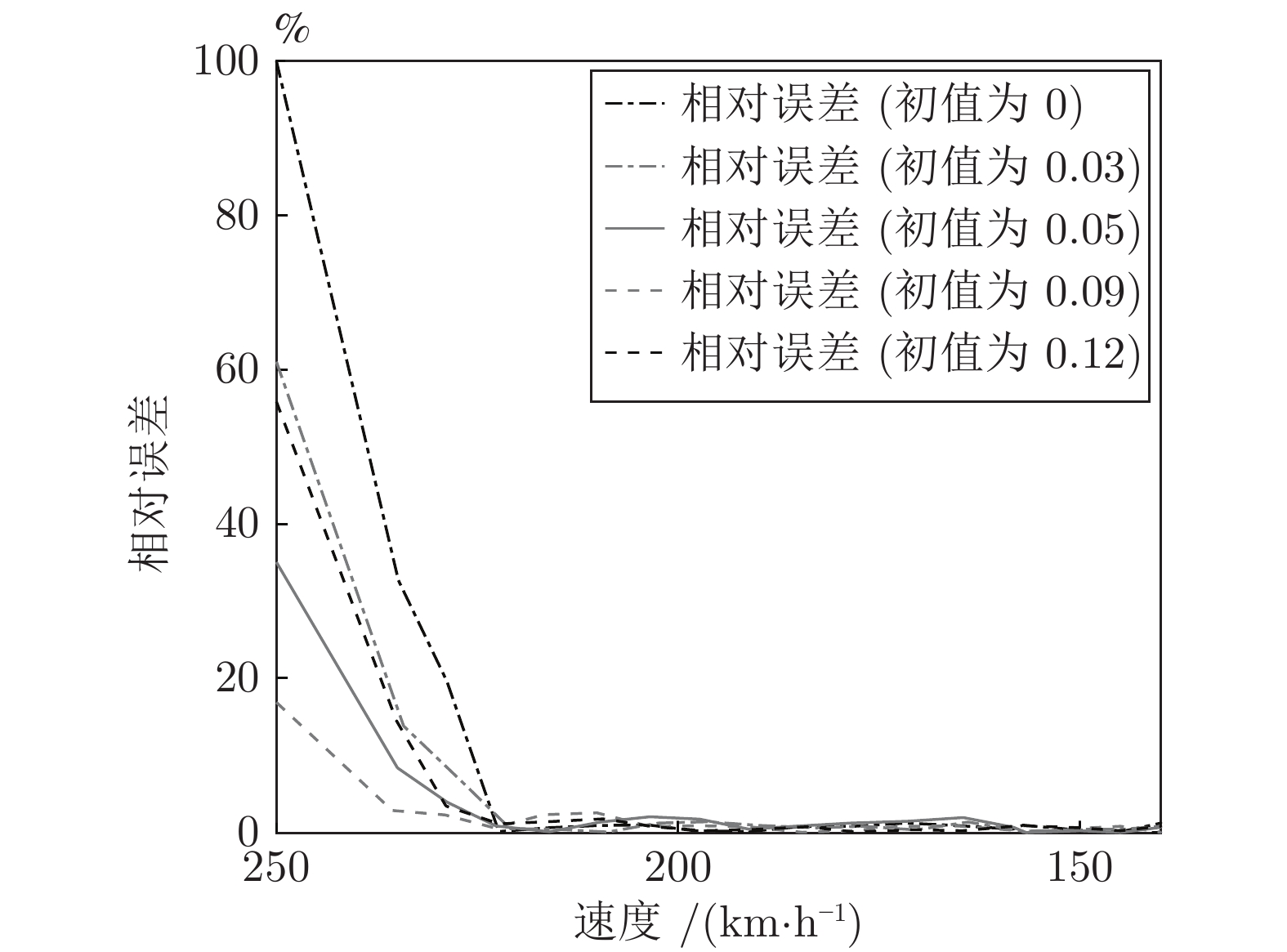
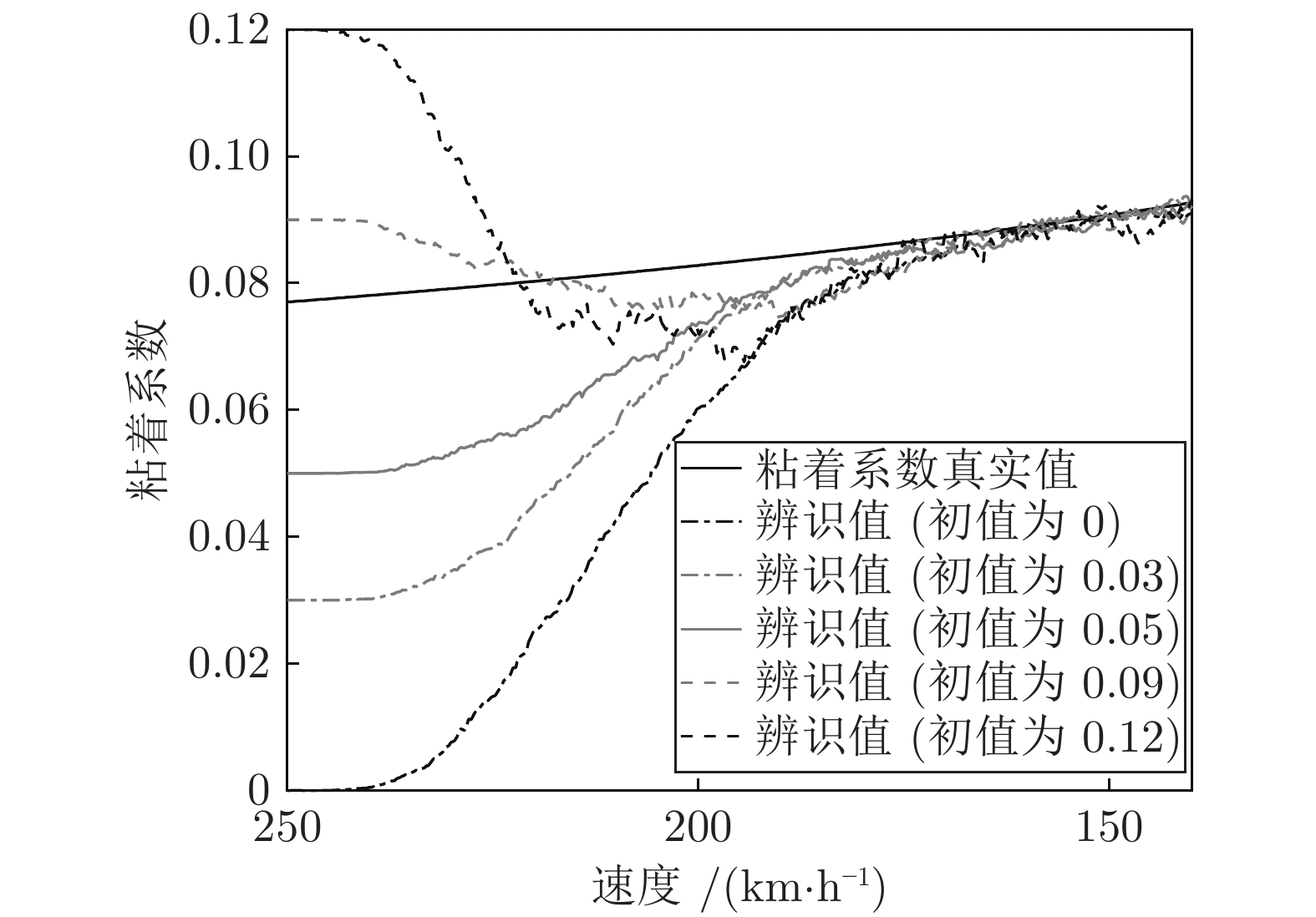
图 4 平道 − 隧道粘着系数实时估计
Fig. 4 Real-time estimation of adhesion coefficient from external rail to tunnel rail
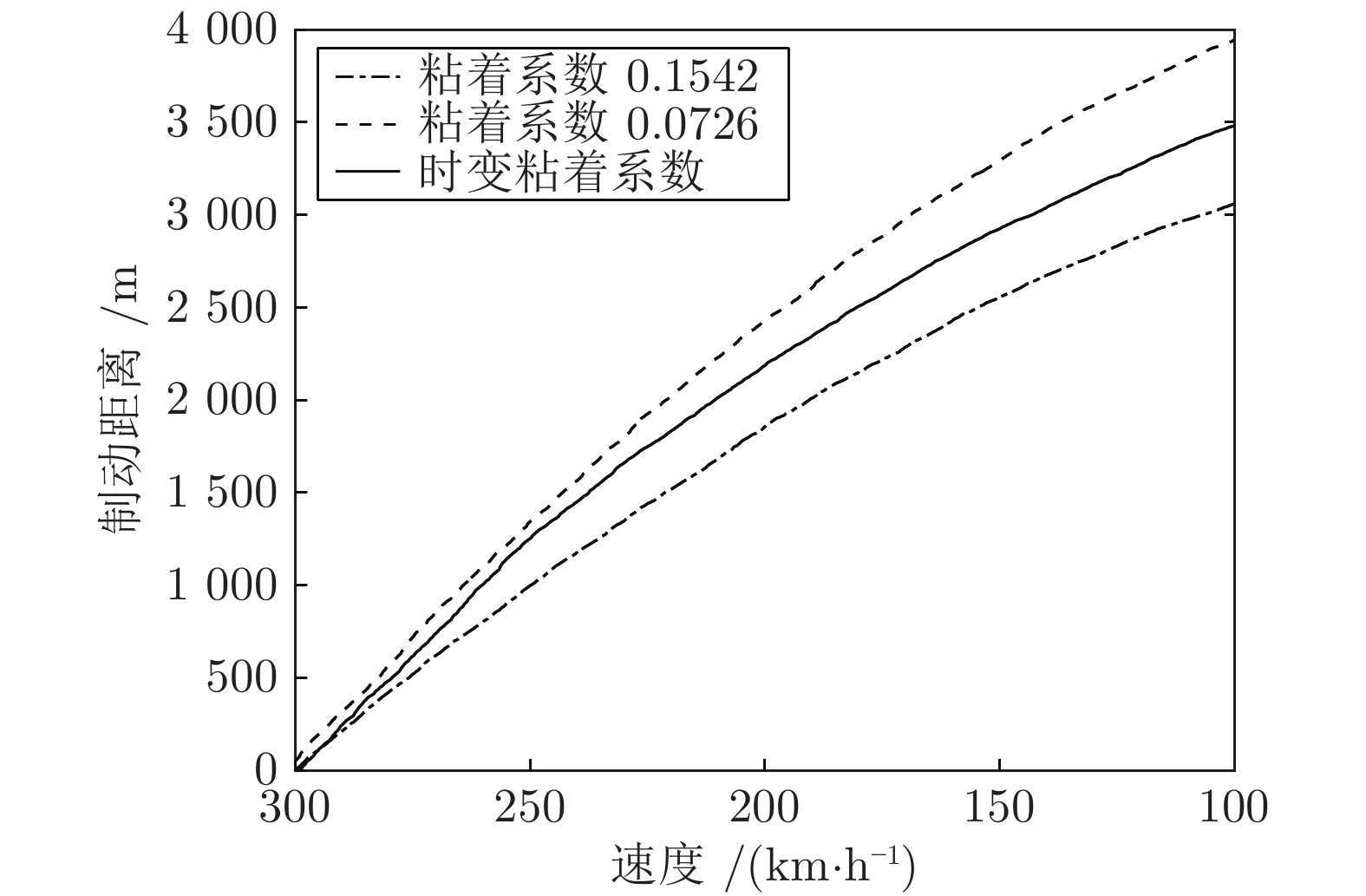
图 10 列车平道 − 隧道制动速度与制动距离
Fig. 10 Braking speed and distance of train fromexternal rail to tunnel rail
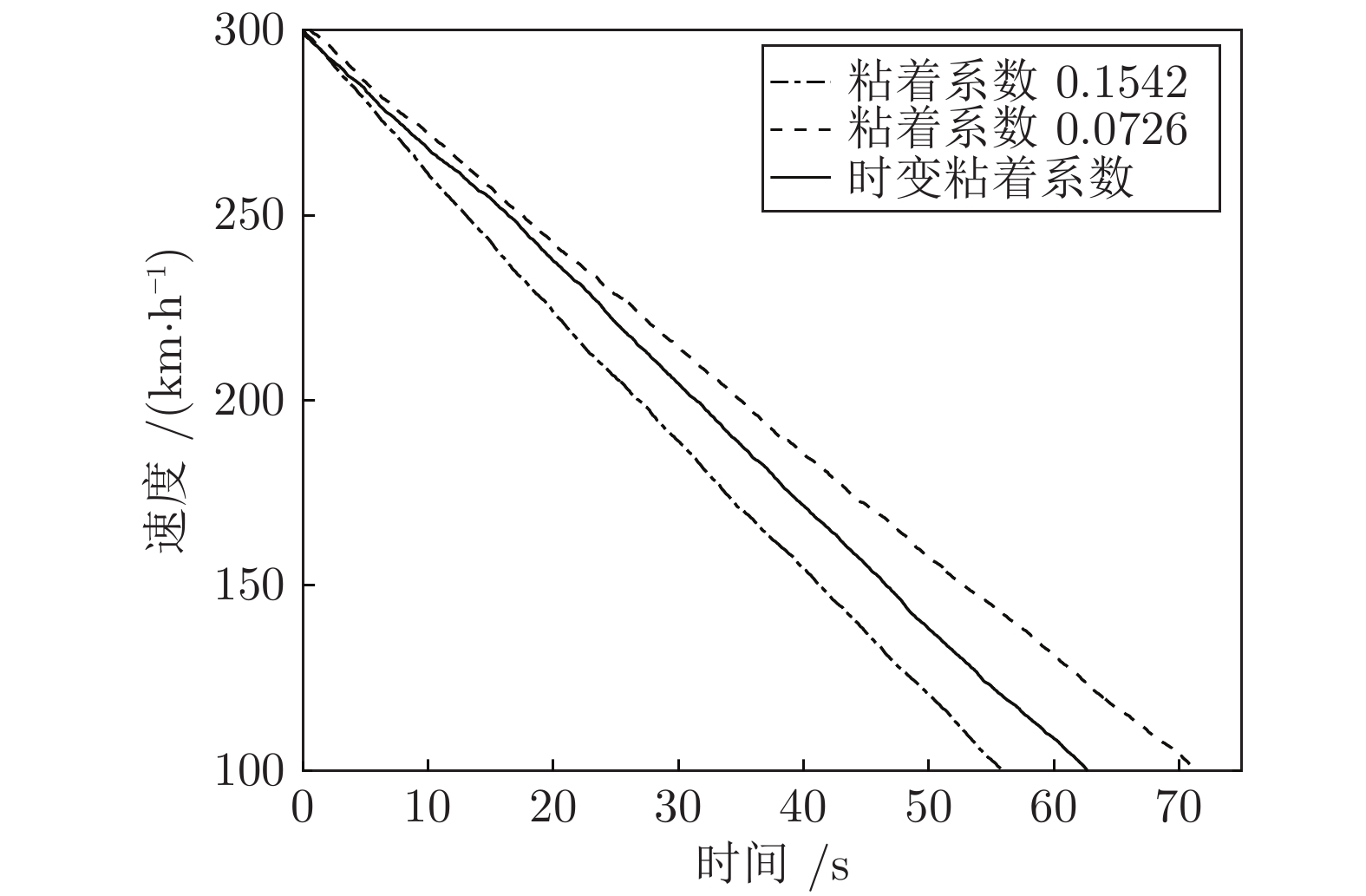
图 11 列车平道 − 隧道制动速度与制动时间
Fig. 11 Train braking speed and braking time fromexternal rail to tunnel rail
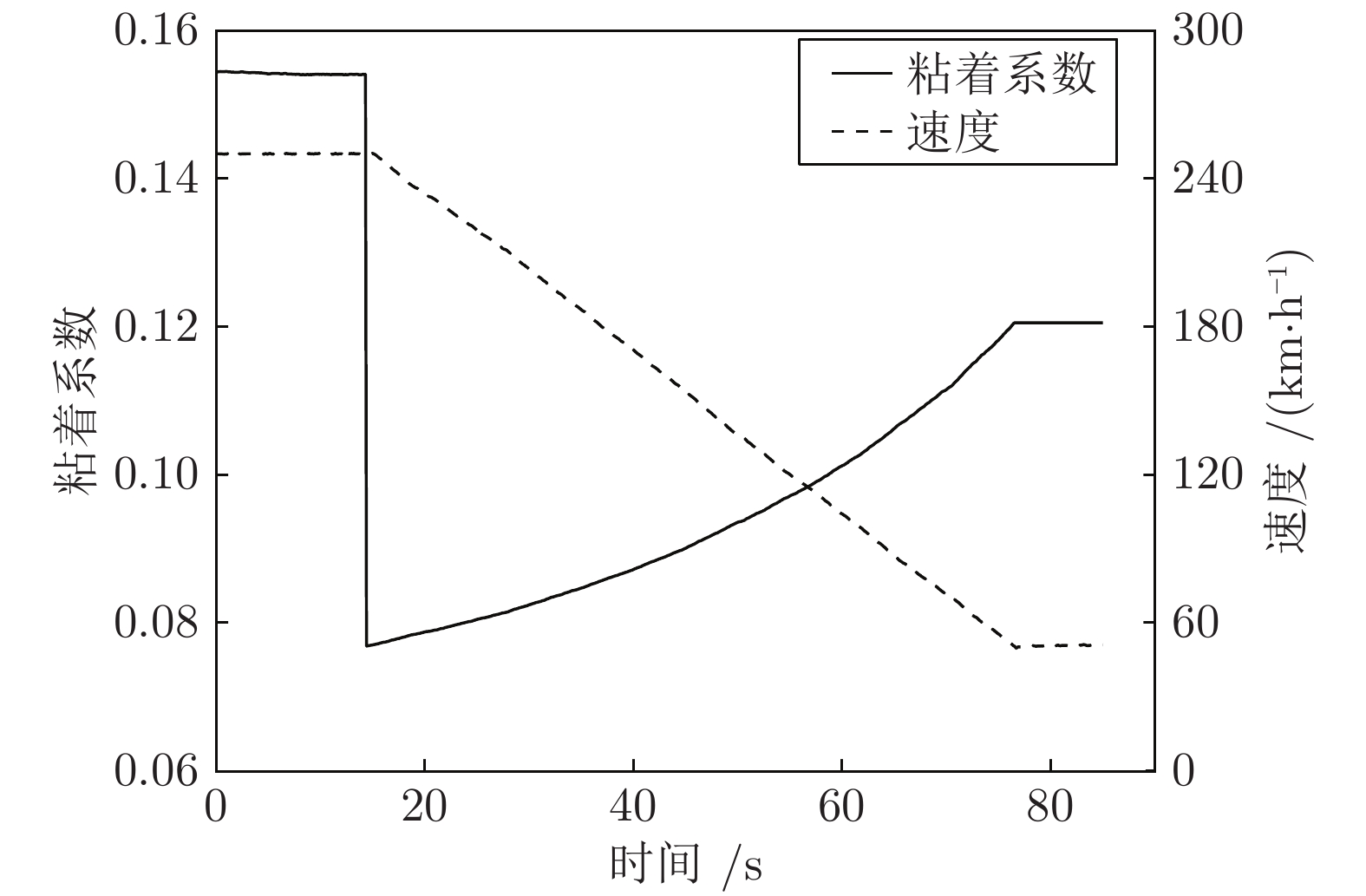
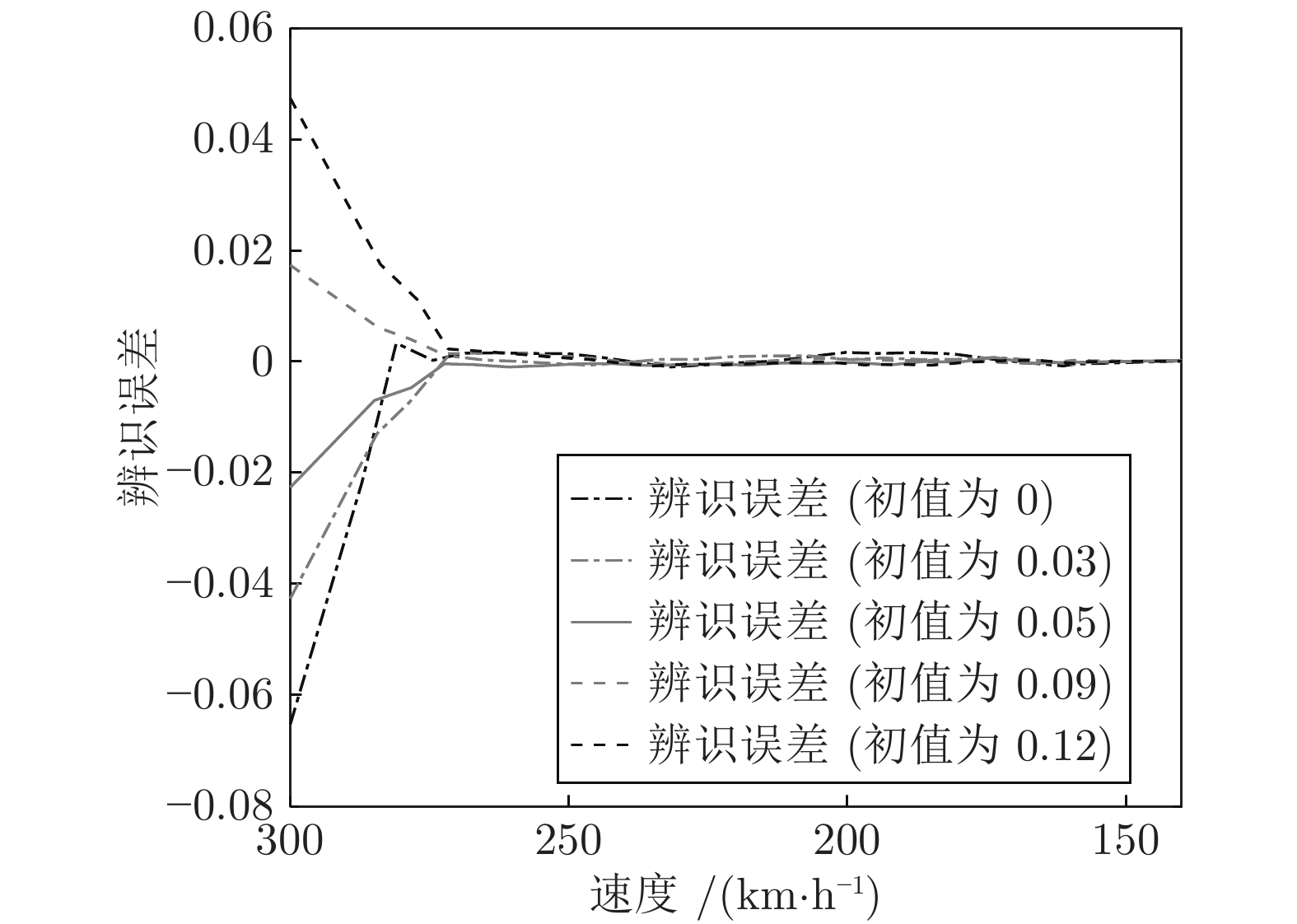
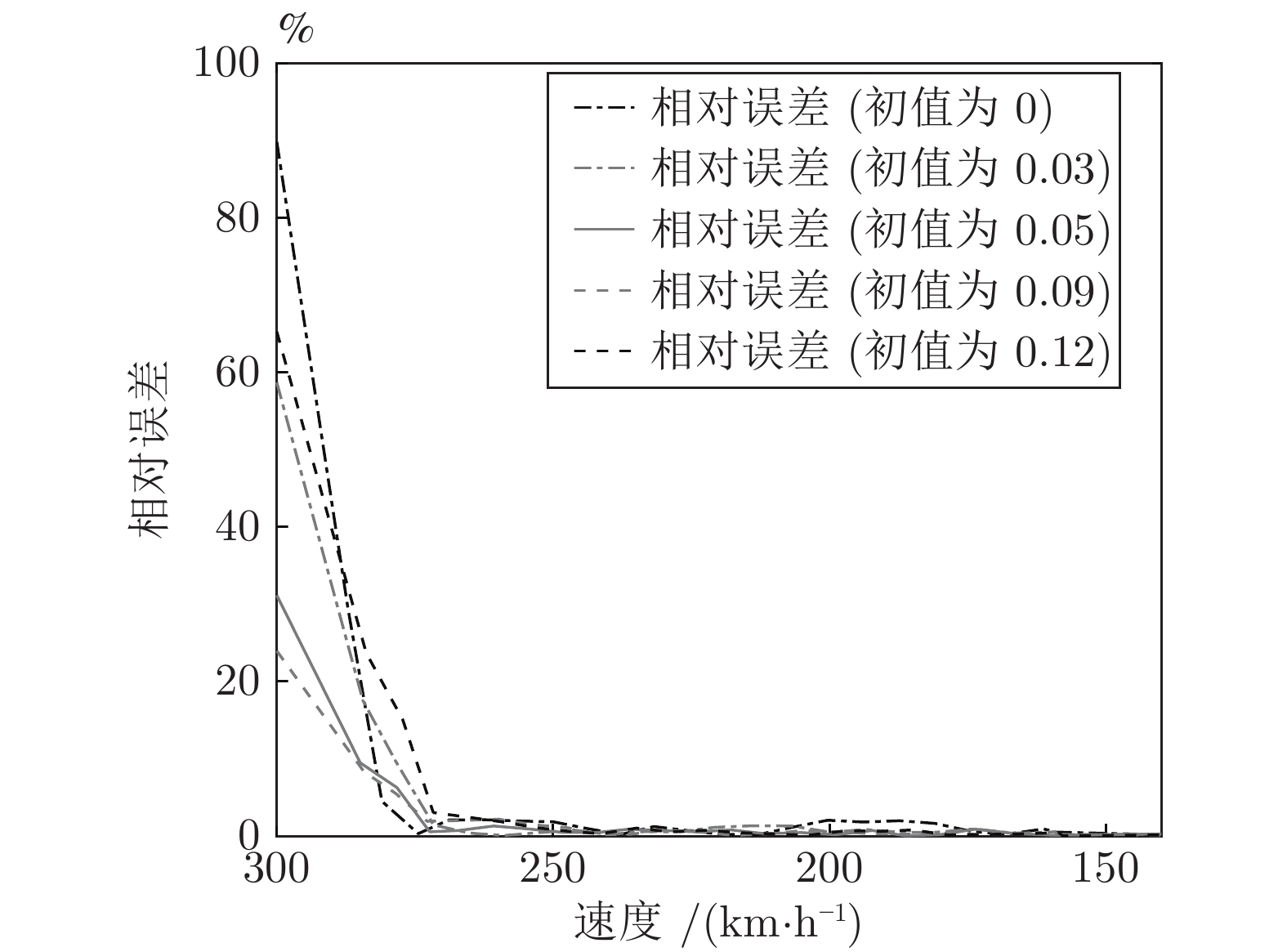
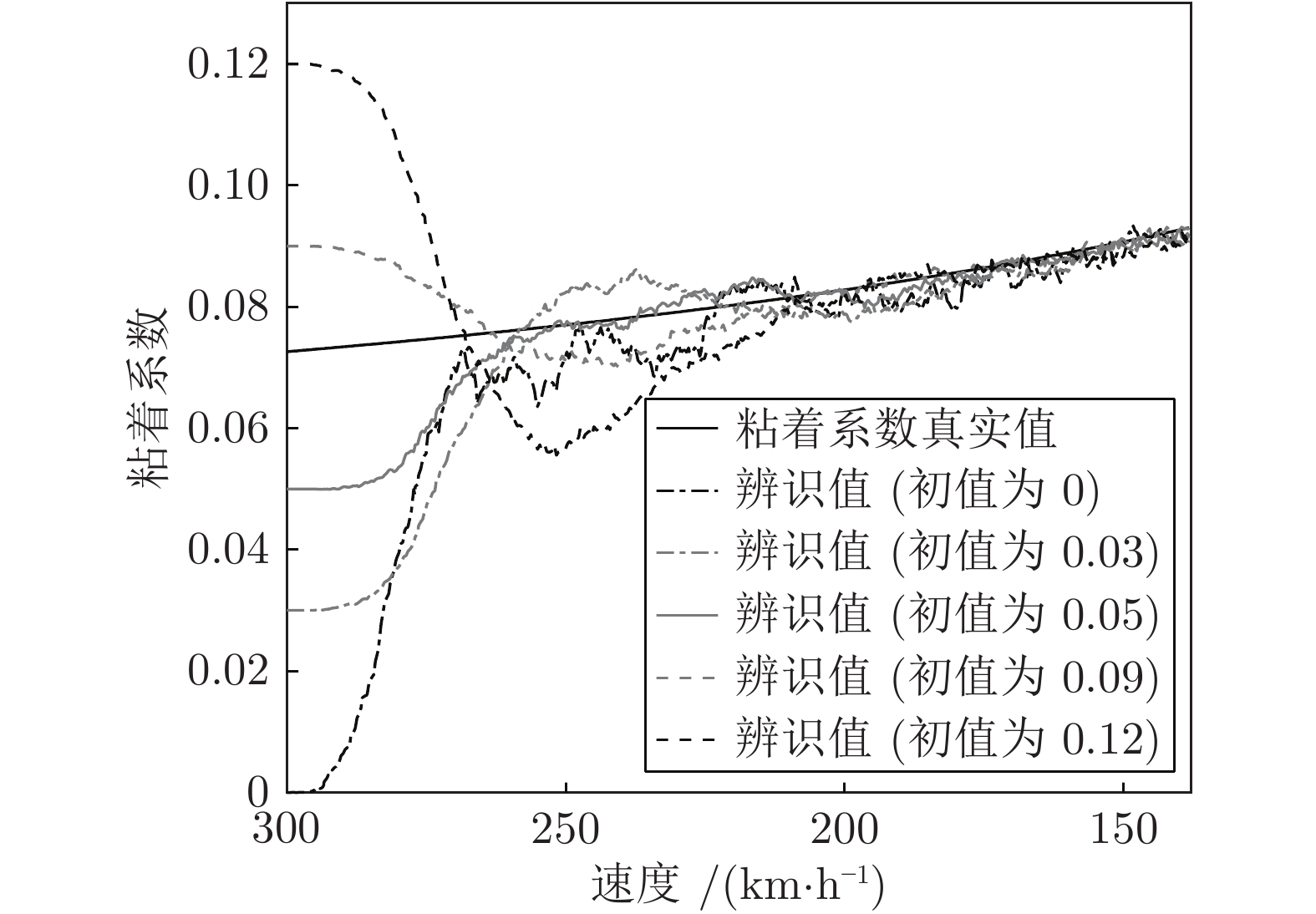
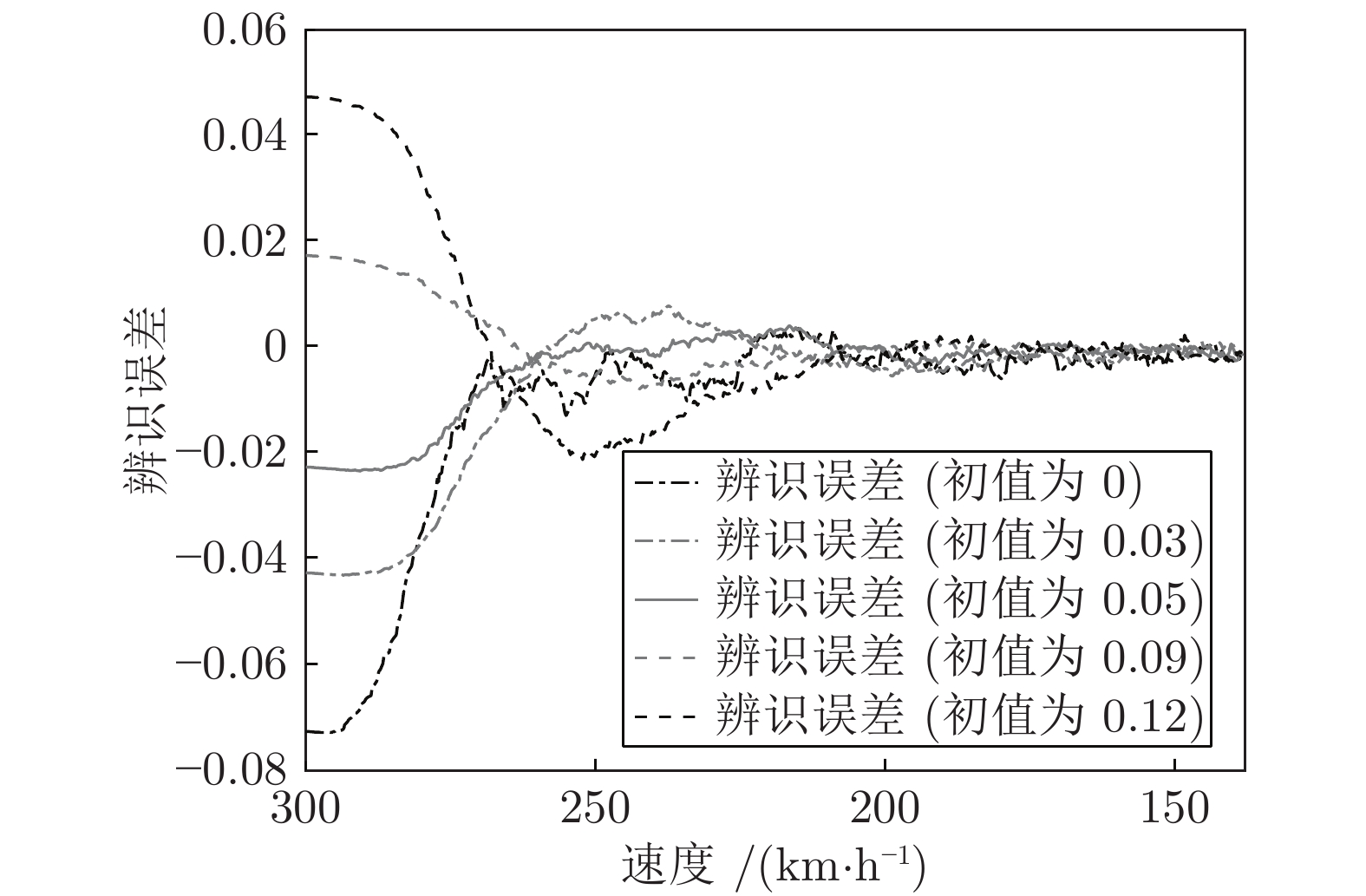
图 12 轮轨隧道 − 平道粘着系数
Fig. 12 Adhesion coefficient of wheel-rail from tunnel rail to external rail

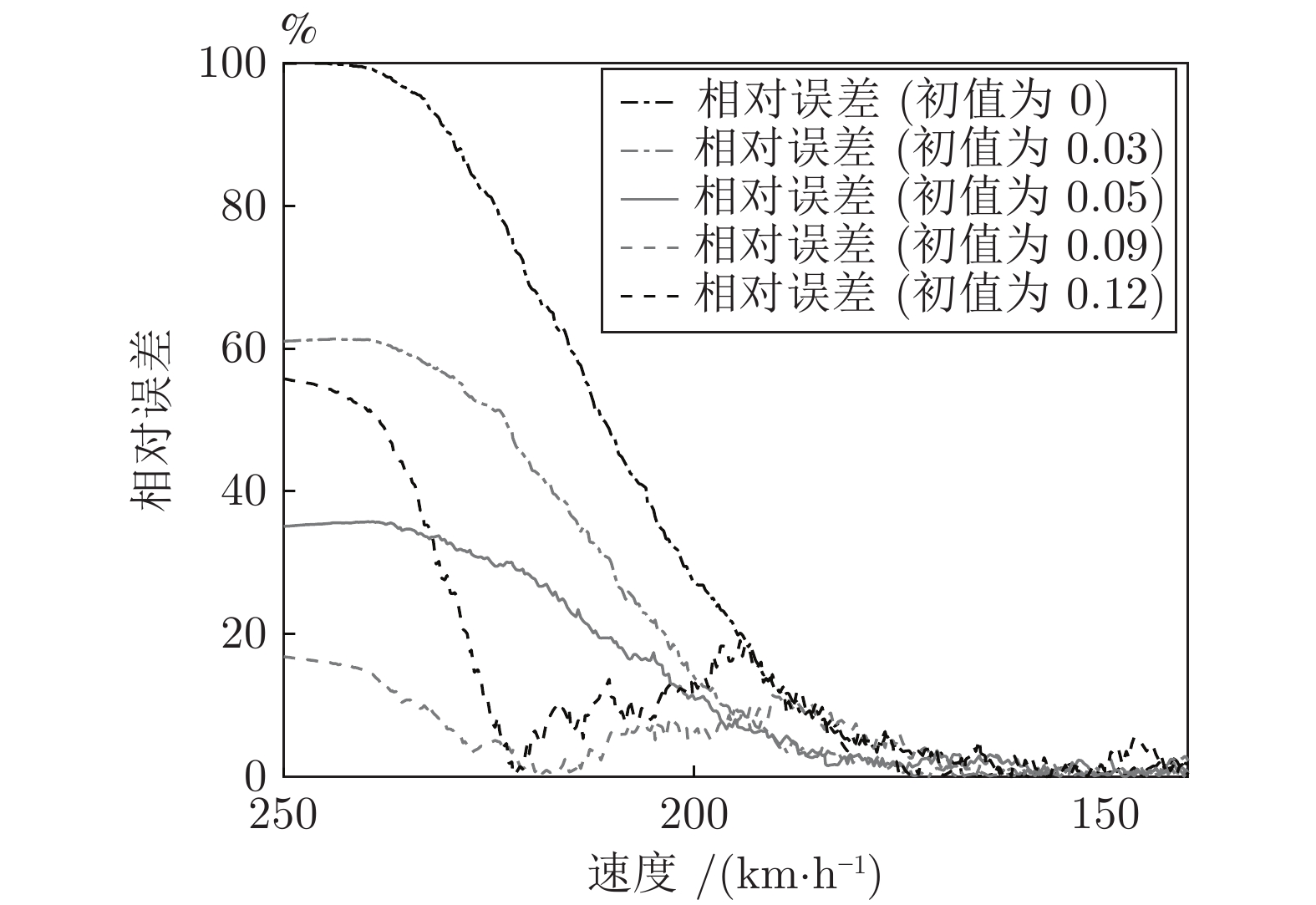
图 14 隧道 − 平道粘着系数实时估计
Fig. 14 Real-time estimation of adhesion coefficient from tunnel rail to external rail
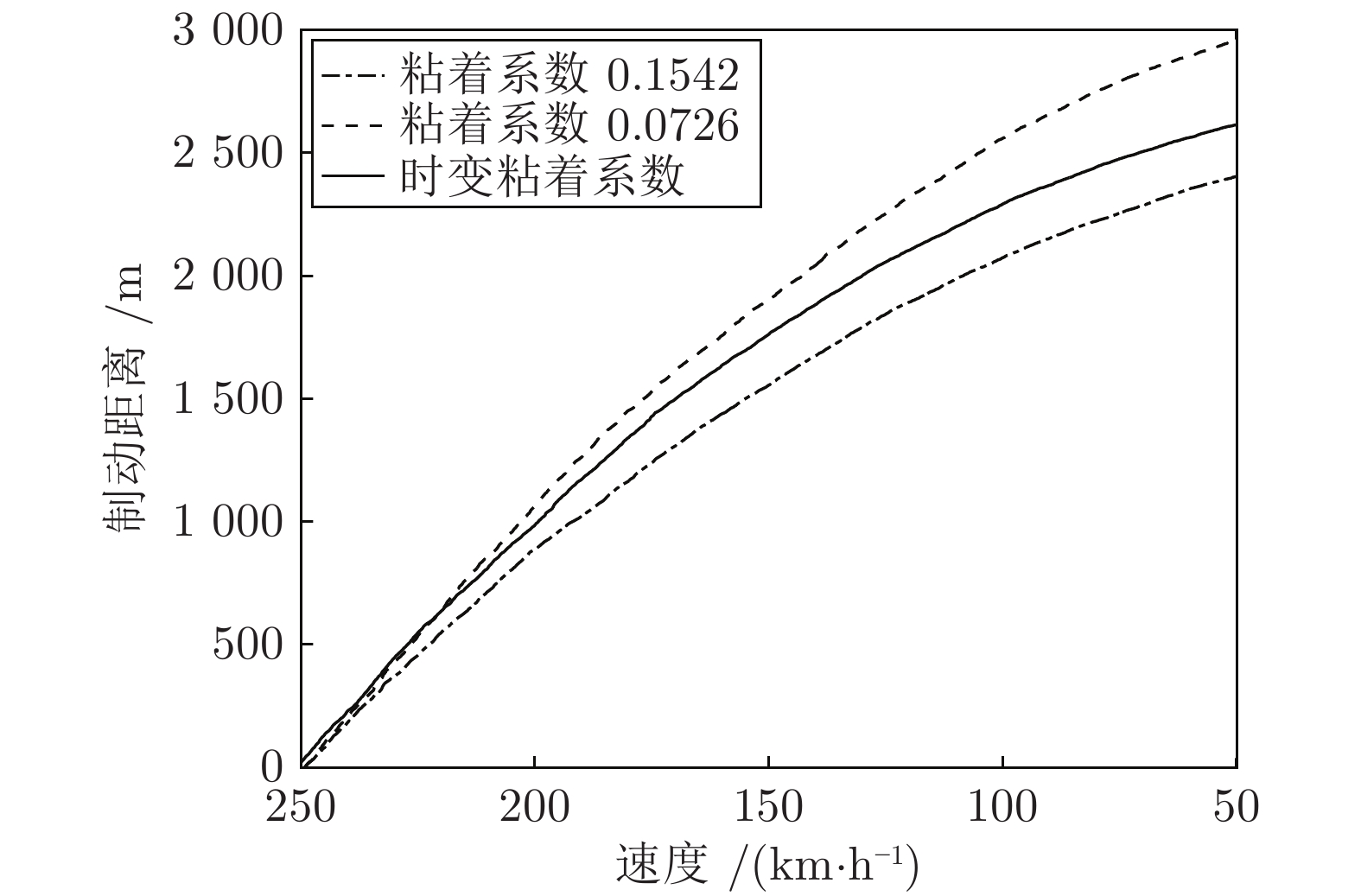
图 20 列车隧道 − 平道制动速度与制动距离
Fig. 20 Braking speed and distance of train fromtunnel rail to external rail
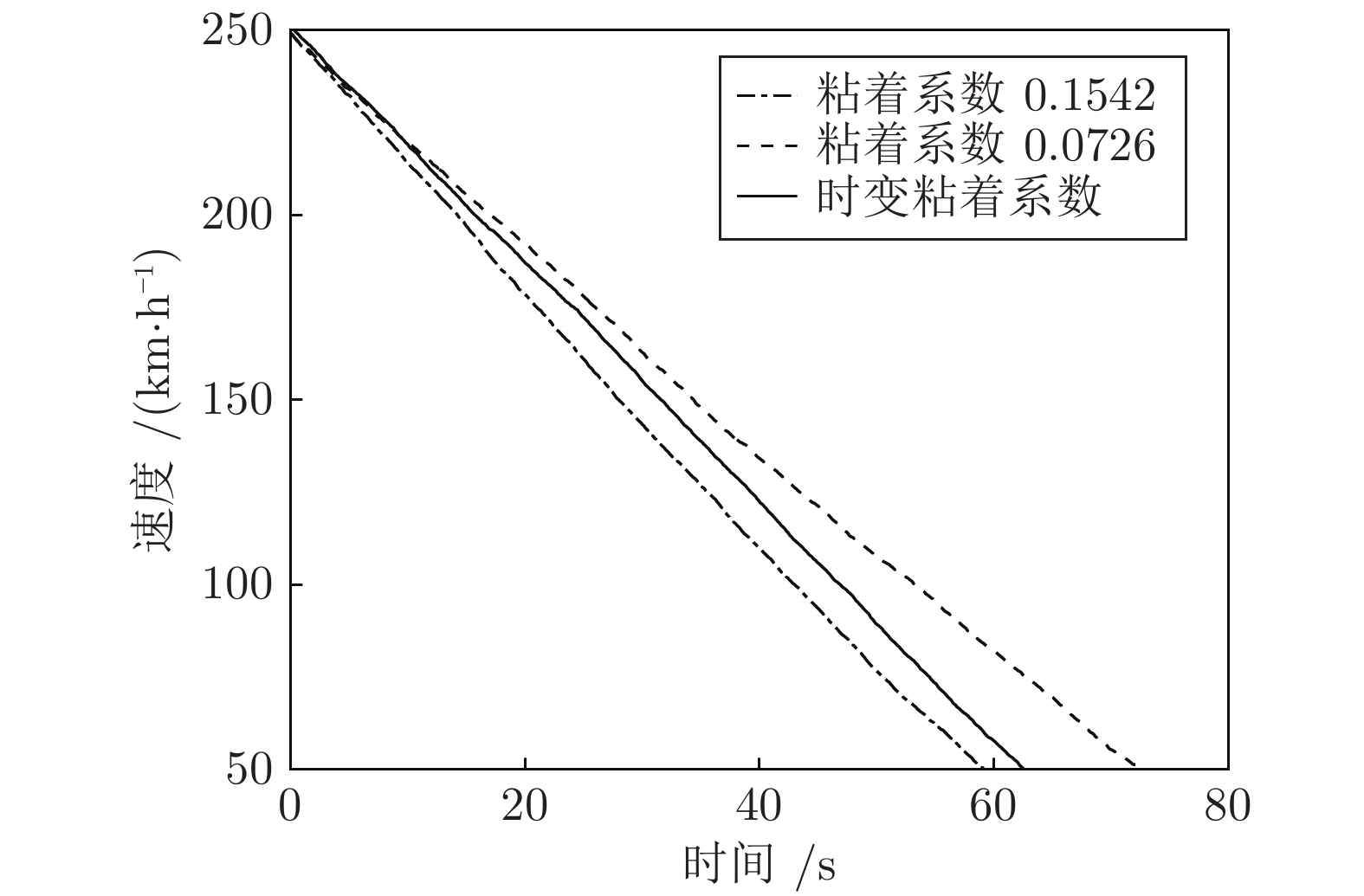
图 21 列车隧道 − 平道制动速度与制动时间
Fig. 21 Braking speed and braking time of train from tunnel rail to external rail
表 1 CRH3紧急制动主要参数特性
Table 1 Main emergency braking parameters of CRH3
参数名称 参数特性 列车总重量 (t) 536 最高运行速度 (km/h) 350 持续运行速度 (km/h) 300 制动缸直径 (mm) 203 制动缸空气压力 (kPa) 410 传动效率 0.85 制动倍率 2.55 制动盘摩擦系数 0.28 制动盘平均摩擦半径 (mm) 297.6 车轮滚动圆半径 (mm) 460  下载: 导出CSV
下载: 导出CSV
表 2 粘着系数实时估计结果对比
Table 2 Comparison of real-time estimation results of adhesion coefficient
本文方法 EKF 初值 估计误差 相对误差 (%) 估计误差 相对误差 (%) 0.00 $\pm $0.0017 2.0907 $\pm $0.0129 13.7828 0.03 $\pm $0.0011 1.3984 $\pm $0.0078 9.9778 0.05 $\pm $0.0009 1.2802 $\pm $0.0081 10.7114 0.09 $\pm $0.0016 2.1527 $\pm $0.0079 10.1600 0.12 $\pm $0.0023 2.4306 $\pm $0.0137 15.5428 平均值 $\pm $0.0015 1.8705 $\pm $0.0101 12.0350
下载: 导出CSV
表 3 粘着系数实时估计结果对比
Table 3 Comparison of real-time estimation results of adhesion coefficient
本文方法 EKF 初值 估计误差 相对误差 (%) 估计误差 相对误差 (%) 0.00 $\pm $0.0011 1.2338 $\pm $0.0117 13.8956 0.03 $\pm $0.0012 1.4101 $\pm $0.0120 14.4391 0.05 $\pm $0.0017 2.0780 $\pm $0.0095 11.4757 0.09 $\pm $0.0021 2.5633 $\pm $0.0096 11.4356 0.12 $\pm $0.0015 1.7995 $\pm $0.0121 14.3814 平均值 $\pm $0.0015 1.8169 $\pm $0.0110 13.1255
下载: 导出CSV
-
[1] 1 Hu H X, Tang B, Gong X J. Intelligent fault diagnosis of the high-speed train with big data based on deep neural networks. IEEE Transactions on Industrial Informatics, 2017, 13(4): 2106−2116 doi: 10.1109/TII.2017.2683528 [2] 2 Pan P Y, Hu H T, Yang X W, Blaabjerg F, Wang X F, He Z Y. Impedance measurement of traction network and electric train for stability analysis in high-speed railways. IEEE Transactions on Power Electronics, 2018, 33(12): 10086−10100 doi: 10.1109/TPEL.2018.2836660 [3] 周东华, 纪洪泉, 何潇. 高速列车信息控制系统的故障诊断技术. 自动化学报, 2018, 44(7): 1153−11643 Zhou Dong-Hua, Ji Hong-Quan, He Xiao. Fault diagnosis techniques for the information control system of high-speed trains. Acta Automatica Sinica, 2018, 44(7): 1153−1164 [4] 4 Zhang K P, Jiang B, Tao G. Mimo evolution model-based coupled fault estimation and adaptive control with high-speed train applications. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1552−1566 doi: 10.1109/TCST.2017.2735360 [5] 5 Ning B, Dong H R, Gao S G. Distributed cooperative control of multiple high-speed trains under a moving block system by nonlinear mapping-based feedback. Science China (Information Sciences), 2018, 61(12): 22−33 [6] 6 Dong H R, Gao S G, Ning B. Cooperative control synthesis and stability analysis of multiple trains under moving signaling systems. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2730−2738 doi: 10.1109/TITS.2016.2518649 [7] 7 Song Q, Song Y D, Tang T. Computationally inexpensive tracking control of high-speed trains with traction/braking saturation. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1116−1125 doi: 10.1109/TITS.2011.2143409 [8] 8 Song Y D, Song Q, Cai W C. Fault-tolerant adaptive control of high-speed trains under traction/braking failures: a virtual parameter-based approach. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2): 737−748 doi: 10.1109/TITS.2013.2290310 [9] 9 Su S, Tang T, Roberts C. A cooperative train control model for energy saving. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 622−631 doi: 10.1109/TITS.2014.2334061 [10] 10 Song Q, Song Y D. Data-based fault-tolerant control of high-speed trains with traction/braking notch nonlinearities and actuator failures. IEEE Transactions on Neural Networks, 2011, 22(12): 2250−2261 doi: 10.1109/TNN.2011.2175451 [11] 郭红戈, 谢克明. 动车组列车制动系统的 Hammerstein 模型及其参数辨识方法. 铁道学报, 2014, 36(4): 48−53 doi: 10.3969/j.issn.1001-8360.2014.04.00911 Guo Hong-Ge, Xie Ke-Ming. Hammerstein model and parameters identification of EMU braking system. Journal of the China Railway Society, 2014, 36(4): 48−53 doi: 10.3969/j.issn.1001-8360.2014.04.009 [12] 12 Ding F, Xu L, Alsaadi F E. Iterative parameter identification for pseudo-linear systems with ARMA noise using the filtering technique. Iet Control Theory and Applications, 2018, 12(7): 892−899 doi: 10.1049/iet-cta.2017.0821 [13] 13 Ding F, Liu X G, Chu J. Gradient-based and least-squares-based iterative algorithms for Hammerstein systems using the hierarchical identification principle. Iet Control Theory and Applications, 2013, 7(2): 176−184 doi: 10.1049/iet-cta.2012.0313 [14] 14 Chon T B, Wills A, Ninness B. System identification of nonlinear state-space models. Automatica, 2011, 47(1): 39−49 doi: 10.1016/j.automatica.2010.10.013 [15] 15 Ding F, Liu G, Liu X P. Parameter estimation with scarce measurements. Automatica, 2011, 47(8): 1646−1655 doi: 10.1016/j.automatica.2011.05.007 [16] 16 Ding F, Wang F F, Xu L. Parameter estimation for pseudo-linear systems using the auxiliary model and the decomposition technique. IET Control Theory and Applications, 2017, 11(3): 390−400 doi: 10.1049/iet-cta.2016.0491 [17] 17 Ding F, Chen T W. Performance analysis of multi-innovation gradient type identification methods. Automatica, 2007, 43(1): 1−14 doi: 10.1016/j.automatica.2006.07.024 [18] 18 Ma P, Ding F, Zhu Q M. Decomposition-based recursive least squares identification methods for multivariate pseudo-linear systems using the multi-innovation. International Journal of Systems Science, 2018, 49(5): 920−928 doi: 10.1080/00207721.2018.1433247 [19] 19 Ding F, Chen T. Hierarchical gradient-based identification of multivariable discrete-time systems. Automatica, 2005, 41(2): 315−325 doi: 10.1016/j.automatica.2004.10.010 [20] 20 Zhang X, Ding F, Xu L. State filtering-based least squares parameter estimation for bilinear systems using the hierarchical identification principle. IET Control Theory and Applications, 2018, 12(12): 1704−1713 doi: 10.1049/iet-cta.2018.0156 [21] 21 Ding F, Liu G J, Liu X P. Partially coupled stochastic gradient identification methods for non-uniformly sampled systems. IEEE Transactions on Automatic Control, 2010, 55(8): 1976−1981 doi: 10.1109/TAC.2010.2050713 [22] 22 Wang X, Ding F. Partially coupled extended stochastic gradient algorithm for nonlinear multivariable output error moving average systems. Engineering Computations, 2017, 34(2): 629−647 doi: 10.1108/EC-05-2015-0126 [23] 衷路生, 李兵, 龚锦红. 高速列车非线性模型的极大似然辨识. 自动化学报, 2014, 40(12): 2950−295823 Zhong Lu-Sheng, Li Bing, Gong Jin-Hong. Maximum likelihood identification of nonlinear model for high-speed train. Acta Automatica Sinica, 2014, 40(12): 2950−2958 [24] 谢国, 张丹, 黑新宏. 高速列车纵向动力学模型时变参数在线辨识方法. 交通运输工程学报, 2017, 17(1): 71−81 doi: 10.3969/j.issn.1671-1637.2017.01.00924 Xie Guo, Zhang Dan, Hei Xin-Hong. Online identification method of time-varying parameters for longitudinal dynamics model of high-speed train. Journal of Traffic and Transportation Engineering, 2017, 17(1): 71−81 doi: 10.3969/j.issn.1671-1637.2017.01.009 [25] 25 Noh S J, Shim D, Jeon M. Adaptive sliding-window strategy for vehicle detection in highway environments. Adaptive Sliding-Window Strategy for Vehicle Detection in Highway Environments, 2016, 17(2): 323−335 [26] 26 Shakil S, Billings J C, Keiholz S D. Parametric dependencies of sliding window correlation. IEEE Transactions on Biomedical Engineering, 2018, 65(2): 254−263 doi: 10.1109/TBME.2017.2762763 [27] 27 Zhang Y Q, Lou Y C, Hong Y G. An approximate gradient algorithm for constrained distributed convex optimization. IEEE/CAA Journal of Automatica Sinica, 2015, 1(1): 61−67 -

 下载:
下载:






计量
- 文章访问数: 3367
- HTML全文浏览量: 893
- PDF下载量: 282
- 被引次数: 0
