2016年 第42卷 第3期
2016, 42(3): 321-334.
doi: 10.16383/j.aas.2016.c150477
cstr: 32138.14.j.aas.2016.c150477
摘要:
能量管理对于提高混合动力电动汽车(Hybrid electric vehicles, HEVs)的燃油经济性、驾驶性能及减少排放具有至关重要的作用.本文对混合动力电动汽车能量管理问题的研究进展及现状进行了全面总结, 从不同角度对混合动力电动汽车的能量管理问题进行描述, 并对主要能量管理策略进行了分析和对比研究, 指出各种控制方法的优点及其存在的问题与不足, 最后对混合动力电动汽车能量管理策略研究的未来发展方向进行了展望.
能量管理对于提高混合动力电动汽车(Hybrid electric vehicles, HEVs)的燃油经济性、驾驶性能及减少排放具有至关重要的作用.本文对混合动力电动汽车能量管理问题的研究进展及现状进行了全面总结, 从不同角度对混合动力电动汽车的能量管理问题进行描述, 并对主要能量管理策略进行了分析和对比研究, 指出各种控制方法的优点及其存在的问题与不足, 最后对混合动力电动汽车能量管理策略研究的未来发展方向进行了展望.

2016, 42(3): 335-346.
doi: 10.16383/j.aas.2016.c150539
cstr: 32138.14.j.aas.2016.c150539
摘要:
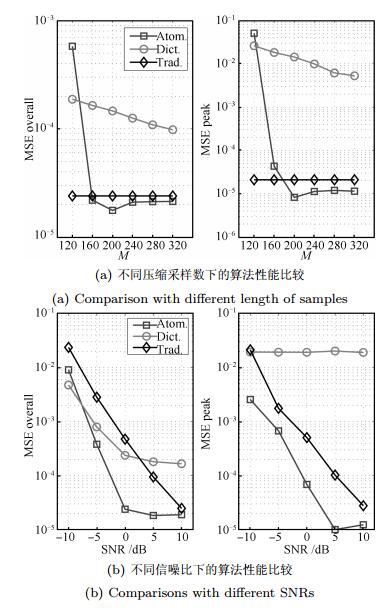
压缩感知理论能够以远低于经典Nyquist速率进行采样, 采用非自适应线性投影获得了保留信号有用信息的少量观测点, 并通过求解最优化问题精确重构原始信号.压缩感知理论大大缓解了信号采样、存储和传输的巨大压力, 在计算机科学、电子工程和信号处理等领域具有广阔的应用前景.信号的稀疏表示是对信号进行压缩采样和重构的前提, 即假设信号在某个变换基(傅里叶基、小波基等)下是稀疏的, 这些基可以看作是用于描述信号参数空间的有限离散字典.然而在如雷达、阵列信号处理、通信等领域的应用中, 信号的参数空间是连续的, 在假定的离散变换基下并不稀疏, 这种基不匹配问题会严重影响信号重构精度.本文首先介绍了基不匹配产生的原因及其对重构精度的影响, 接着从原子范数出发, 综述了无网格压缩感知的理论框架和关键技术问题, 着重介绍了一维和多维无网格压缩感知的最新研究进展, 最后对其在信号处理等领域的应用进行了探讨.
压缩感知理论能够以远低于经典Nyquist速率进行采样, 采用非自适应线性投影获得了保留信号有用信息的少量观测点, 并通过求解最优化问题精确重构原始信号.压缩感知理论大大缓解了信号采样、存储和传输的巨大压力, 在计算机科学、电子工程和信号处理等领域具有广阔的应用前景.信号的稀疏表示是对信号进行压缩采样和重构的前提, 即假设信号在某个变换基(傅里叶基、小波基等)下是稀疏的, 这些基可以看作是用于描述信号参数空间的有限离散字典.然而在如雷达、阵列信号处理、通信等领域的应用中, 信号的参数空间是连续的, 在假定的离散变换基下并不稀疏, 这种基不匹配问题会严重影响信号重构精度.本文首先介绍了基不匹配产生的原因及其对重构精度的影响, 接着从原子范数出发, 综述了无网格压缩感知的理论框架和关键技术问题, 着重介绍了一维和多维无网格压缩感知的最新研究进展, 最后对其在信号处理等领域的应用进行了探讨.
2016, 42(3): 347-357.
doi: 10.16383/j.aas.2016.c140888
cstr: 32138.14.j.aas.2016.c140888
摘要:
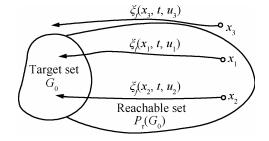
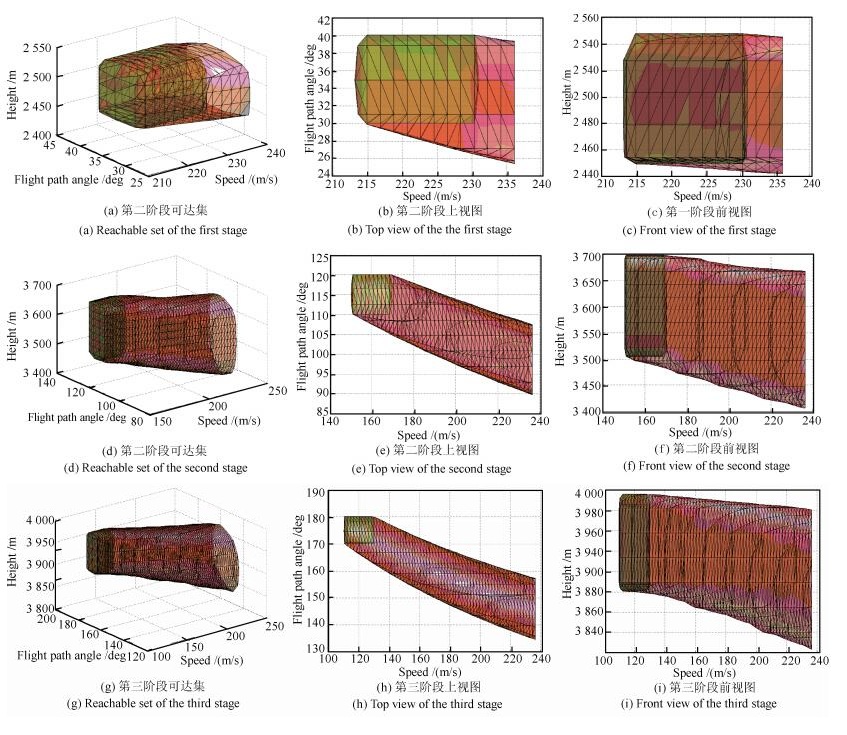
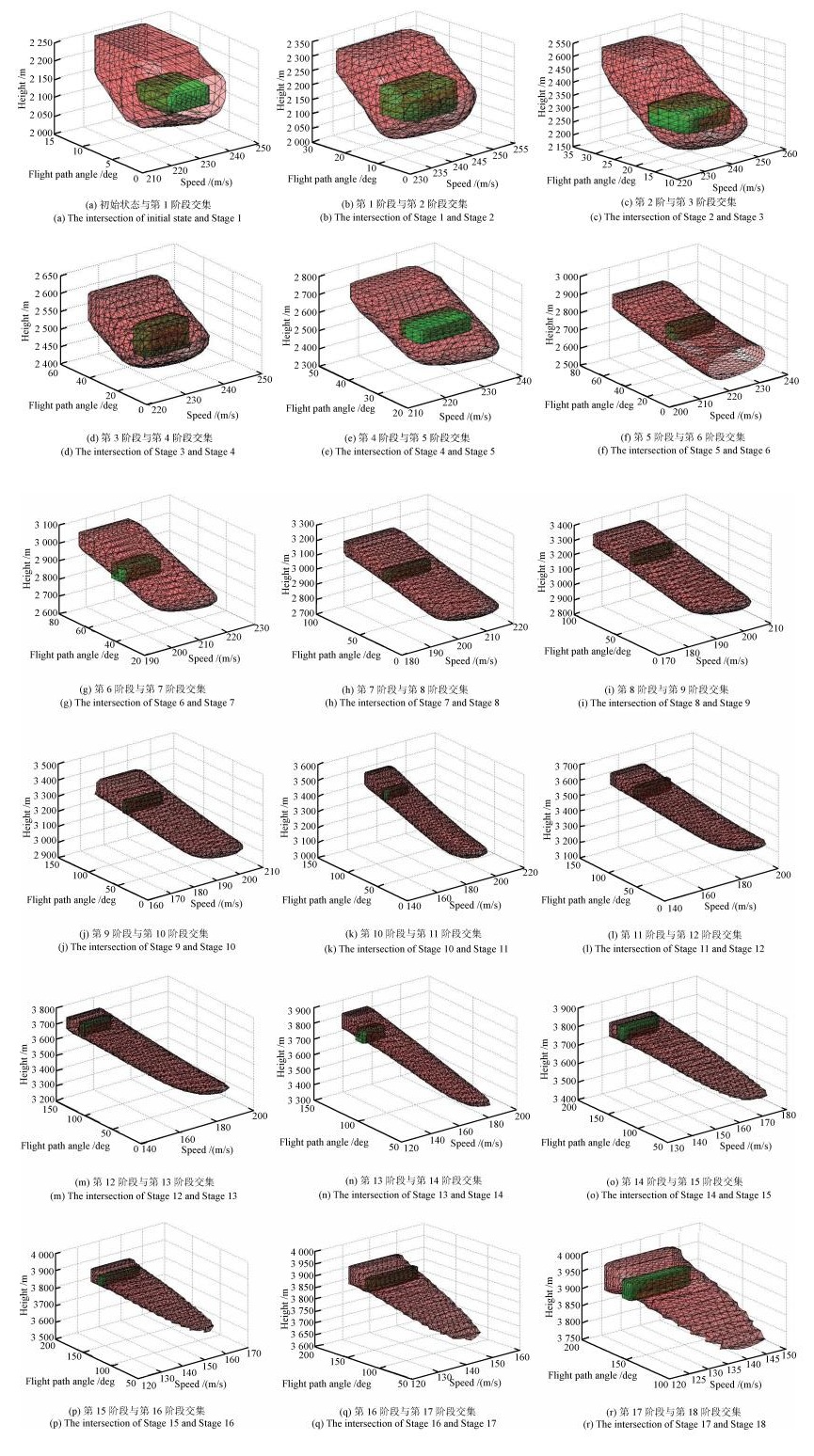
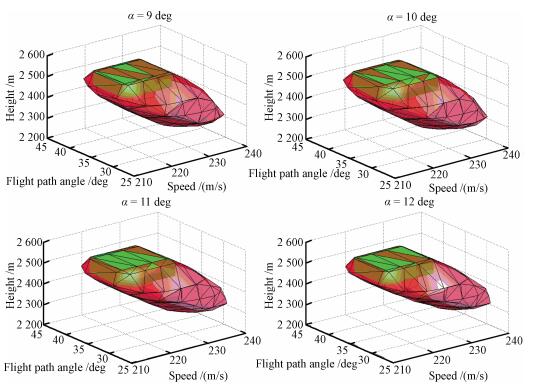
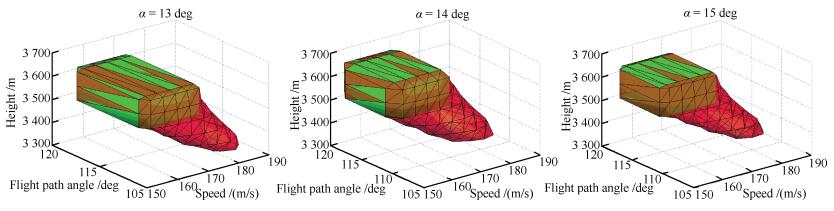
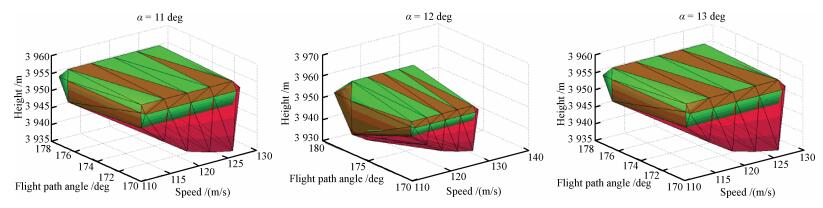
为了给驾驶员完成标准机动动作提供决策支持, 提出一种使用哈密尔顿-雅克比(Hamilton-Jacobi)方程求解机动动作可行状态空间的研究方法.使用关键点将机动动作划分为不同阶段, 将各关键点的标准状态约束作为目标集, 逆时间求解目标集对应的可达集得到各阶段的边界状态范围, 目标集和可达集均由零水平集表示.使用该方法得到斤斗动作三维度运动模型下各阶段的可达集及斤斗动作的可行状态空间, 为了使运动模型的控制量与驾驶员实际操纵更为接近, 构建了以迎角变化率为控制量的四维度运动模型, 在此基础上对斤斗动作各阶段的可达集进行了分析.
为了给驾驶员完成标准机动动作提供决策支持, 提出一种使用哈密尔顿-雅克比(Hamilton-Jacobi)方程求解机动动作可行状态空间的研究方法.使用关键点将机动动作划分为不同阶段, 将各关键点的标准状态约束作为目标集, 逆时间求解目标集对应的可达集得到各阶段的边界状态范围, 目标集和可达集均由零水平集表示.使用该方法得到斤斗动作三维度运动模型下各阶段的可达集及斤斗动作的可行状态空间, 为了使运动模型的控制量与驾驶员实际操纵更为接近, 构建了以迎角变化率为控制量的四维度运动模型, 在此基础上对斤斗动作各阶段的可达集进行了分析.

2016, 42(3): 358-374.
doi: 10.16383/j.aas.2016.c150197
cstr: 32138.14.j.aas.2016.c150197
摘要:
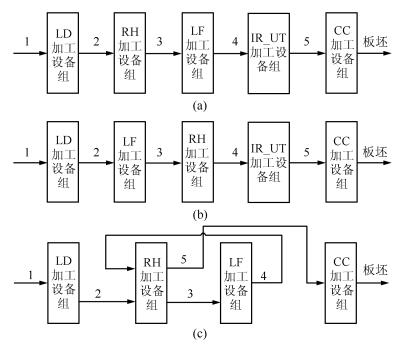
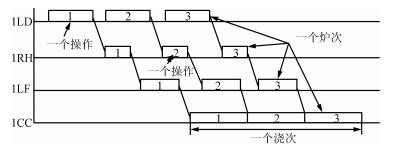
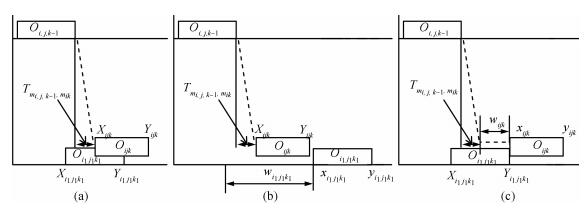
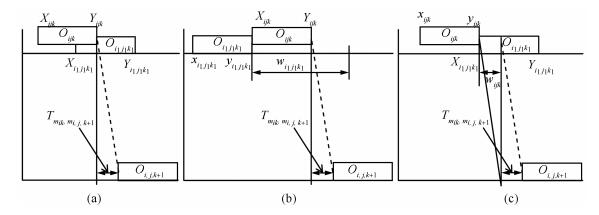
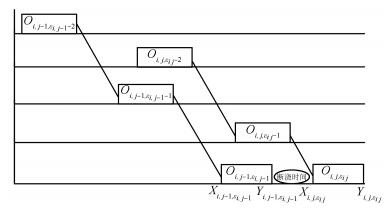
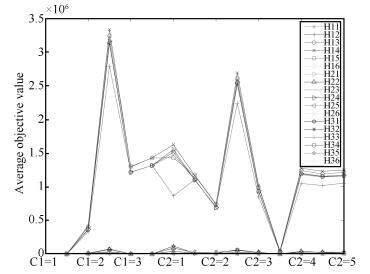
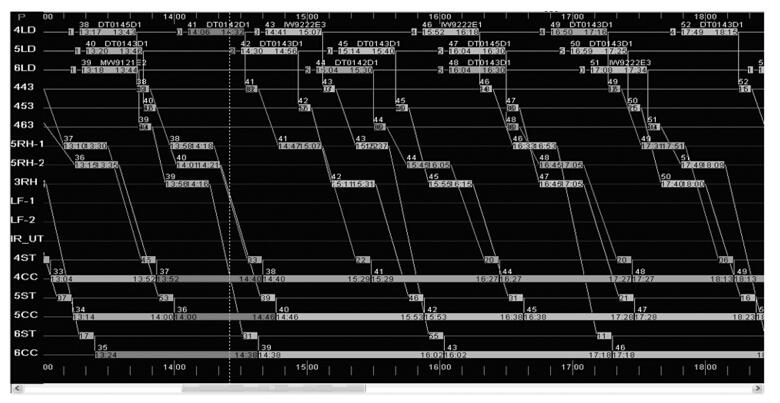
在炼钢-连铸生产过程中, 因铁水或废钢供应不及时经常发生钢水在转炉设备上开工延迟, 导致相邻炉次在同一设备上产生作业冲突或同一浇次内的相邻炉次在连铸机上断浇, 使原调度计划失效.由于炼钢-连铸生产存在多台转炉、多台精炼炉和多台连铸机, 以及多重精炼方式且存在着可重入生产情况, 加上要保证已开工和完工炉次按原调度计划执行, 使得已有炼钢-连铸生产重调度方法难以适用.本文建立了开工时间延迟下的炼钢-连铸生产重调度模型, 将模型分解和启发式方法相结合, 提出了由炉次加工设备指派和作业时间决策组成的启发式重调度方法.通过实际工业数据仿真实验和在某大型钢铁企业的炼钢-连铸生产重调度的工业应用表明所提出的重调度方法显著减少了炉次加工冗余等待时间.
在炼钢-连铸生产过程中, 因铁水或废钢供应不及时经常发生钢水在转炉设备上开工延迟, 导致相邻炉次在同一设备上产生作业冲突或同一浇次内的相邻炉次在连铸机上断浇, 使原调度计划失效.由于炼钢-连铸生产存在多台转炉、多台精炼炉和多台连铸机, 以及多重精炼方式且存在着可重入生产情况, 加上要保证已开工和完工炉次按原调度计划执行, 使得已有炼钢-连铸生产重调度方法难以适用.本文建立了开工时间延迟下的炼钢-连铸生产重调度模型, 将模型分解和启发式方法相结合, 提出了由炉次加工设备指派和作业时间决策组成的启发式重调度方法.通过实际工业数据仿真实验和在某大型钢铁企业的炼钢-连铸生产重调度的工业应用表明所提出的重调度方法显著减少了炉次加工冗余等待时间.





2016, 42(3): 375-384.
doi: 10.16383/j.aas.2016.c150473
cstr: 32138.14.j.aas.2016.c150473
摘要:
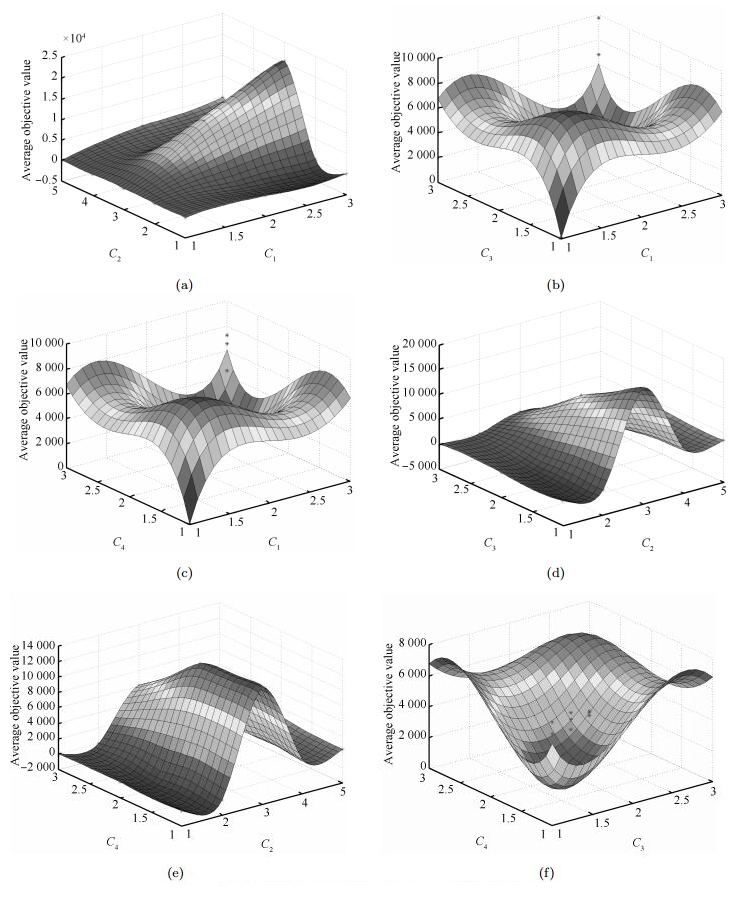
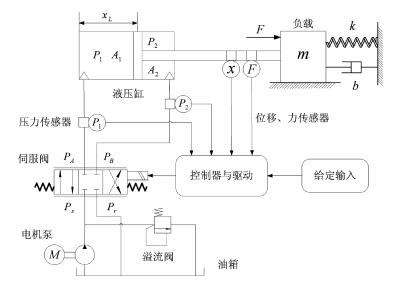
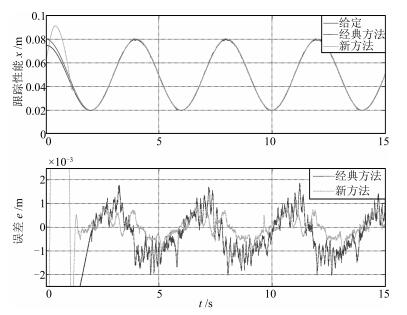
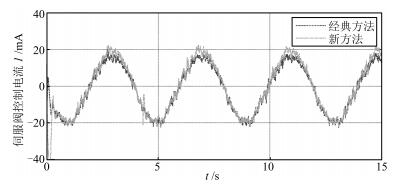
提出了一种自适应鲁棒控制器设计新方法, 并运用在阀控缸电液位置伺服系统中.首先, 将含有确定、不确定、已知、未知、线性和非线性项的电液伺服系统进行完整地数学建模, 以状态空间的形式表出.然后利用本文所提的新方法设计自适应鲁棒控制器和相应的自适应律来处理所建模型中的各项元素.该控制器通过设计一个带有虚拟控制量的控制状态空间表达式并结合状态观测器来获得.设计合适的虚拟控制量, 可在任意给定条件下, 使所有的系统状态都收敛到所设计的理想状态.接着设计李亚普诺夫函数来证明闭环系统的稳定性.最后建立硬件实验平台与经典自适应鲁棒控制方法进行对比实验验证此自适应鲁棒控制器设计新方法的有效性和优势.
提出了一种自适应鲁棒控制器设计新方法, 并运用在阀控缸电液位置伺服系统中.首先, 将含有确定、不确定、已知、未知、线性和非线性项的电液伺服系统进行完整地数学建模, 以状态空间的形式表出.然后利用本文所提的新方法设计自适应鲁棒控制器和相应的自适应律来处理所建模型中的各项元素.该控制器通过设计一个带有虚拟控制量的控制状态空间表达式并结合状态观测器来获得.设计合适的虚拟控制量, 可在任意给定条件下, 使所有的系统状态都收敛到所设计的理想状态.接着设计李亚普诺夫函数来证明闭环系统的稳定性.最后建立硬件实验平台与经典自适应鲁棒控制方法进行对比实验验证此自适应鲁棒控制器设计新方法的有效性和优势.



2016, 42(3): 385-401.
doi: 10.16383/j.aas.2016.c150340
cstr: 32138.14.j.aas.2016.c150340
摘要:
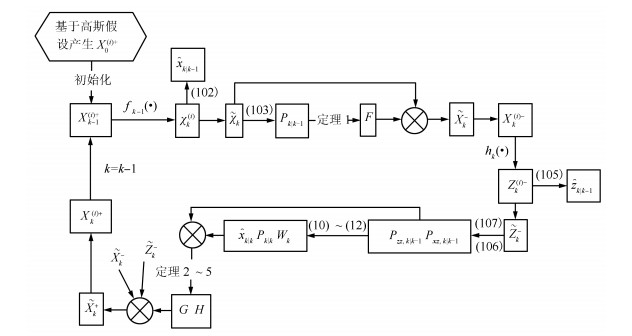
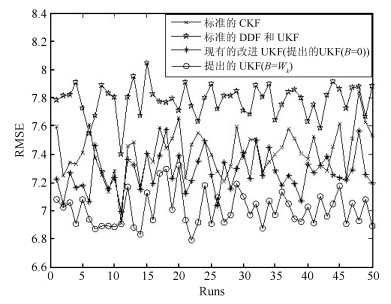
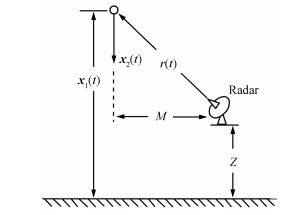
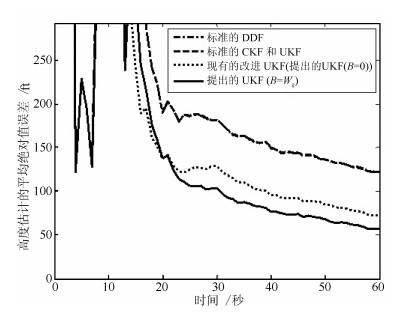
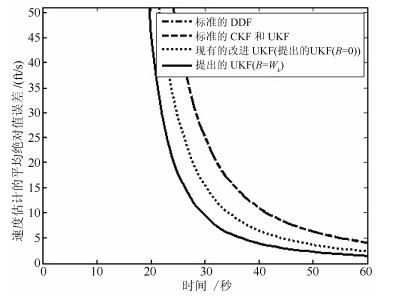
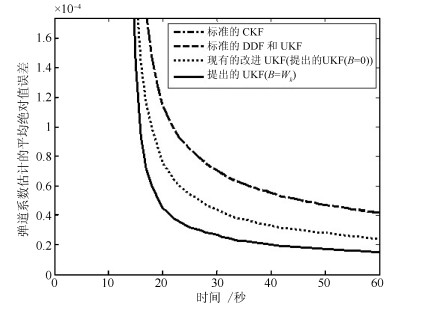
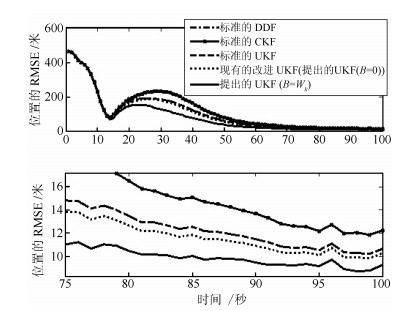
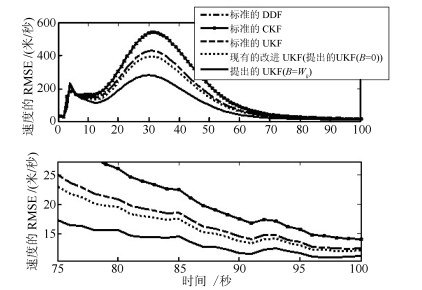
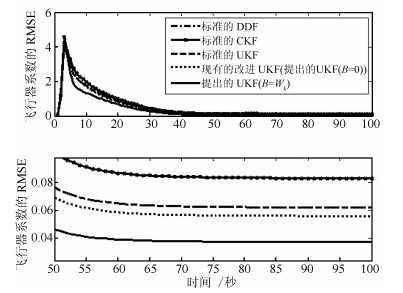
提出了一种改进的高斯近似(Gaussian approximate, GA)滤波方法, 推导了它的一般解和特殊解, 并证明了现有的高斯近似滤波方法是所提出的方法的一种特例.在提出的方法中, 不需要基于高斯假设重复地产生求积点, 而是直接地更新求积点.与现有的高斯近似滤波方法相比, 提出的方法利用了量测求积点修正状态求积点, 从而可以更好地捕获状态一步预测密度和状态后验密度的非高斯信息和高阶矩信息.此外, 提出的方法不仅适用于确定的系统模型而且还适用于随机的系统模型.单变量非平稳增长模型、垂直落体模型、再入飞行器目标跟踪的仿真验证了提出的高斯近似滤波方法的有效性和与现有方法相比的优越性.
提出了一种改进的高斯近似(Gaussian approximate, GA)滤波方法, 推导了它的一般解和特殊解, 并证明了现有的高斯近似滤波方法是所提出的方法的一种特例.在提出的方法中, 不需要基于高斯假设重复地产生求积点, 而是直接地更新求积点.与现有的高斯近似滤波方法相比, 提出的方法利用了量测求积点修正状态求积点, 从而可以更好地捕获状态一步预测密度和状态后验密度的非高斯信息和高阶矩信息.此外, 提出的方法不仅适用于确定的系统模型而且还适用于随机的系统模型.单变量非平稳增长模型、垂直落体模型、再入飞行器目标跟踪的仿真验证了提出的高斯近似滤波方法的有效性和与现有方法相比的优越性.
2016, 42(3): 402-415.
doi: 10.16383/j.aas.2016.c150416
cstr: 32138.14.j.aas.2016.c150416
摘要:
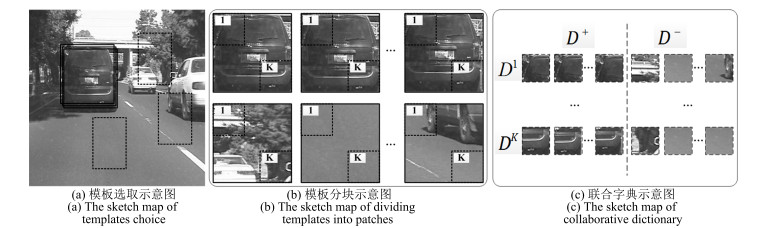
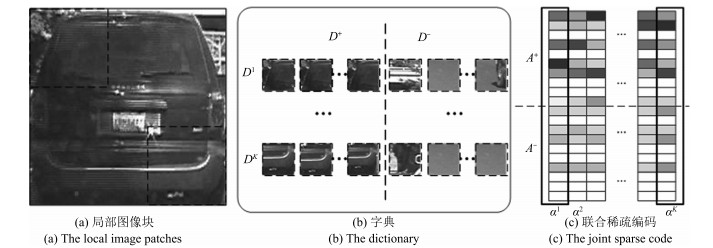
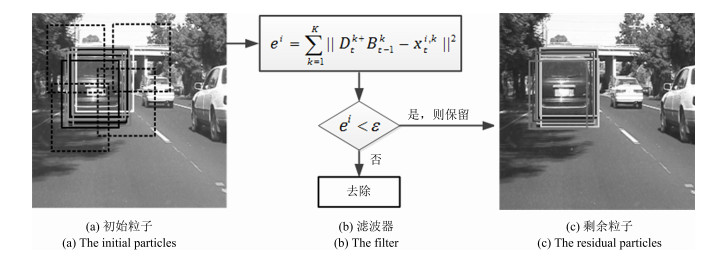
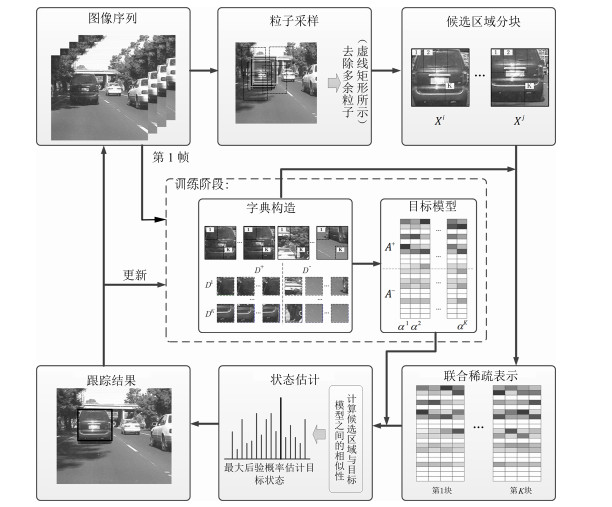
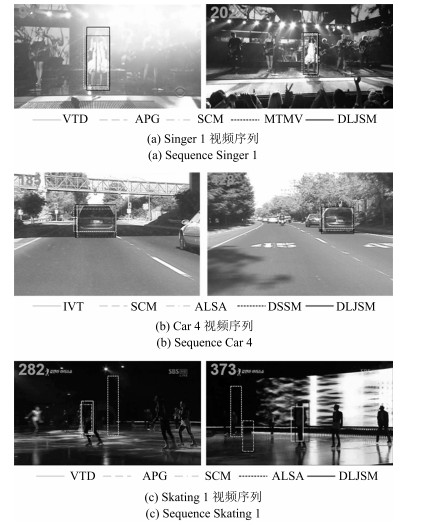
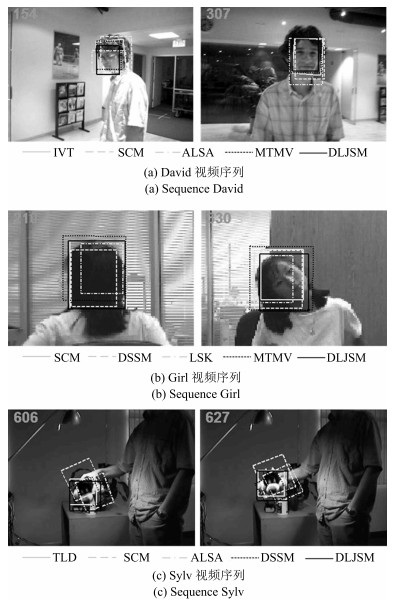
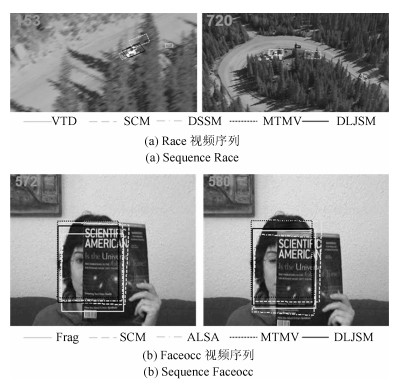
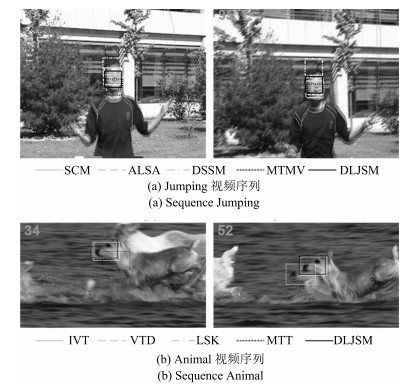
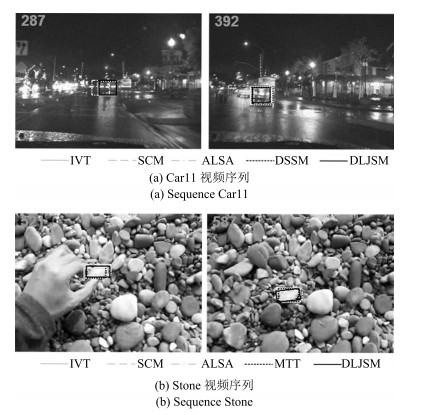
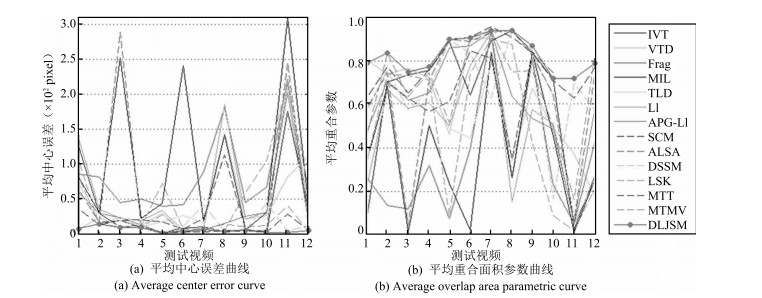
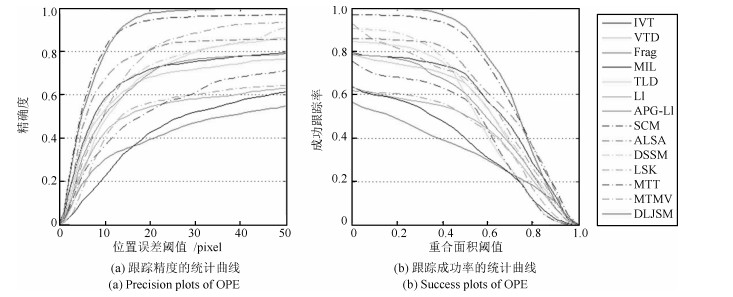
目标表观建模是基于稀疏表示的跟踪方法的研究重点, 针对这一问题, 提出一种基于判别性局部联合稀疏表示的目标表观模型, 并在粒子滤波框架下提出一种基于该模型的多任务跟踪方法(Discriminative local joint sparse appearance model based multitask tracking method, DLJSM).该模型为目标区域内的局部图像分别构建具有判别性的字典, 从而将判别信息引入到局部稀疏模型中, 并对所有局部图像进行联合稀疏编码以增强结构性.在跟踪过程中, 首先对目标表观建立上述模型; 其次根据目标表观变化的连续性对采样粒子进行初始筛选以提高算法的效率; 然后求解剩余候选目标状态的联合稀疏编码, 并定义相似性函数衡量候选状态与目标模型之间的相似性; 最后根据最大后验概率估计目标当前的状态.此外, 为了避免模型频繁更新而引入累积误差, 本文采用每5帧判断一次的方法, 并在更新时保留首帧信息以减少模型漂移.实验测试结果表明DLJSM方法在目标表观发生巨大变化的情况下仍然能够稳定准确地跟踪目标, 与当前最流行的13种跟踪方法的对比结果验证了DLJSM方法的高效性.
目标表观建模是基于稀疏表示的跟踪方法的研究重点, 针对这一问题, 提出一种基于判别性局部联合稀疏表示的目标表观模型, 并在粒子滤波框架下提出一种基于该模型的多任务跟踪方法(Discriminative local joint sparse appearance model based multitask tracking method, DLJSM).该模型为目标区域内的局部图像分别构建具有判别性的字典, 从而将判别信息引入到局部稀疏模型中, 并对所有局部图像进行联合稀疏编码以增强结构性.在跟踪过程中, 首先对目标表观建立上述模型; 其次根据目标表观变化的连续性对采样粒子进行初始筛选以提高算法的效率; 然后求解剩余候选目标状态的联合稀疏编码, 并定义相似性函数衡量候选状态与目标模型之间的相似性; 最后根据最大后验概率估计目标当前的状态.此外, 为了避免模型频繁更新而引入累积误差, 本文采用每5帧判断一次的方法, 并在更新时保留首帧信息以减少模型漂移.实验测试结果表明DLJSM方法在目标表观发生巨大变化的情况下仍然能够稳定准确地跟踪目标, 与当前最流行的13种跟踪方法的对比结果验证了DLJSM方法的高效性.
2016, 42(3): 416-430.
doi: 10.16383/j.aas.2016.c150492
cstr: 32138.14.j.aas.2016.c150492
摘要:
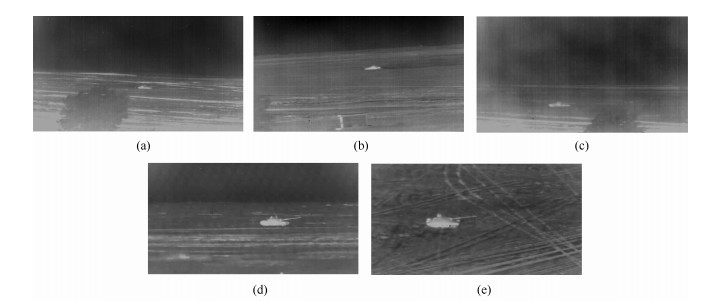
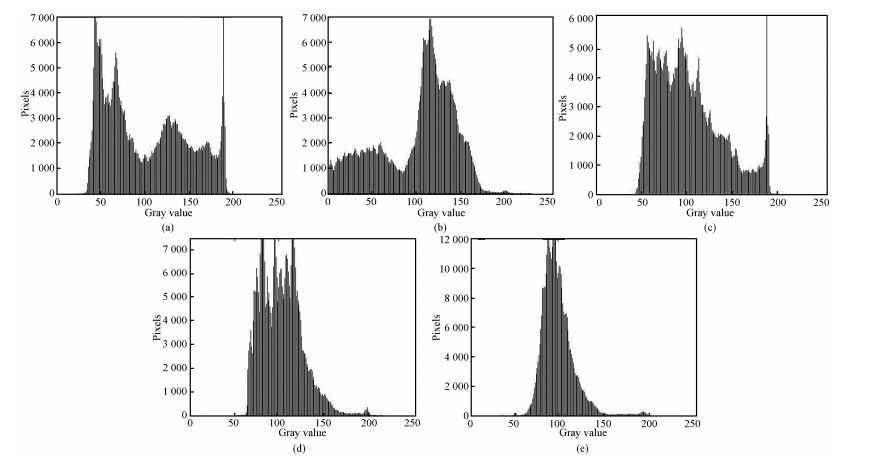
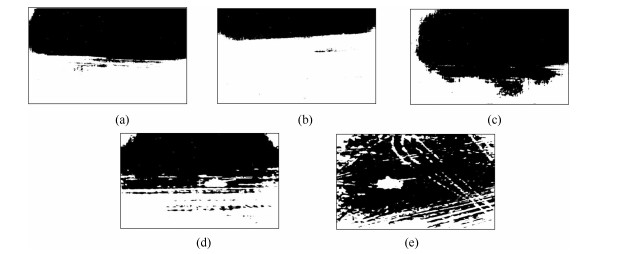
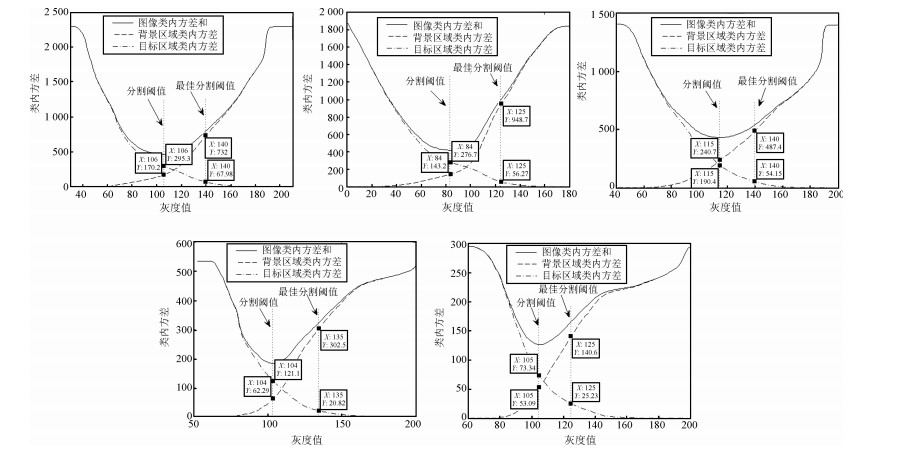
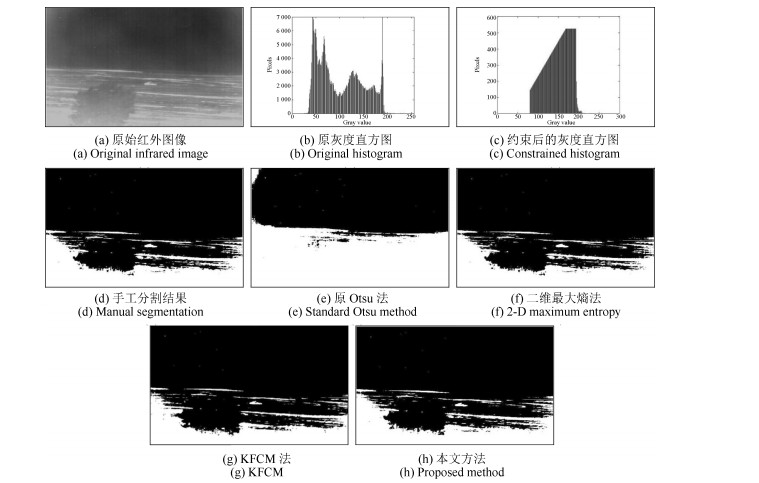
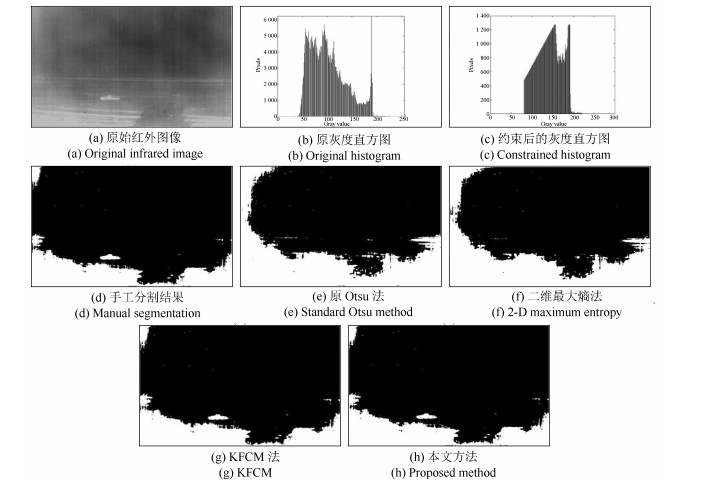
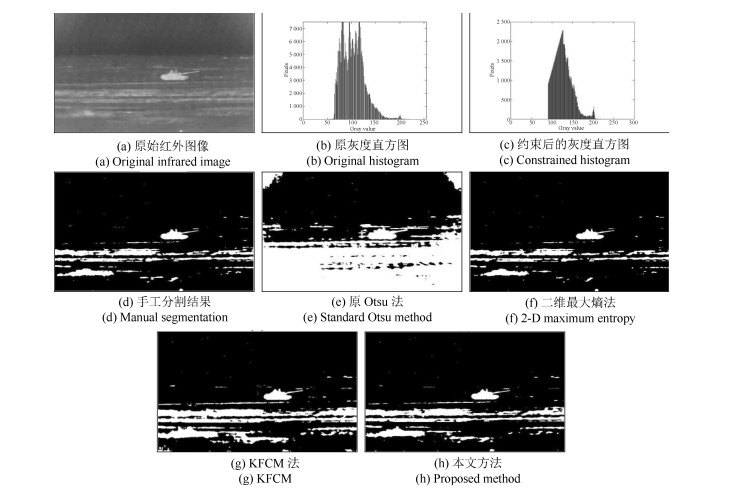
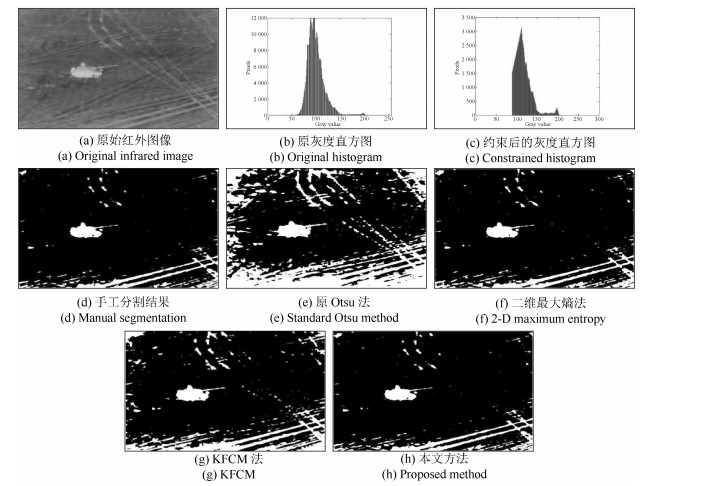
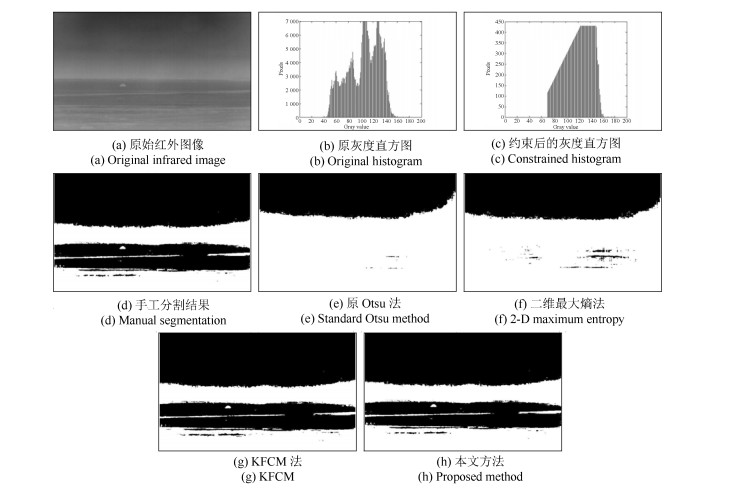
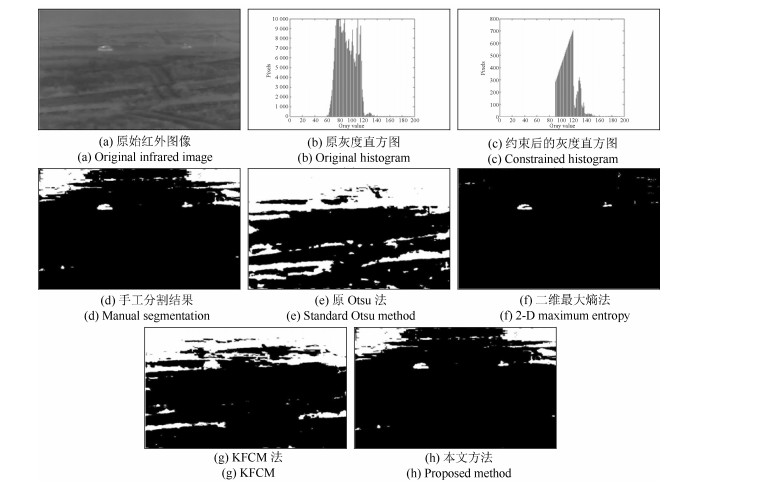
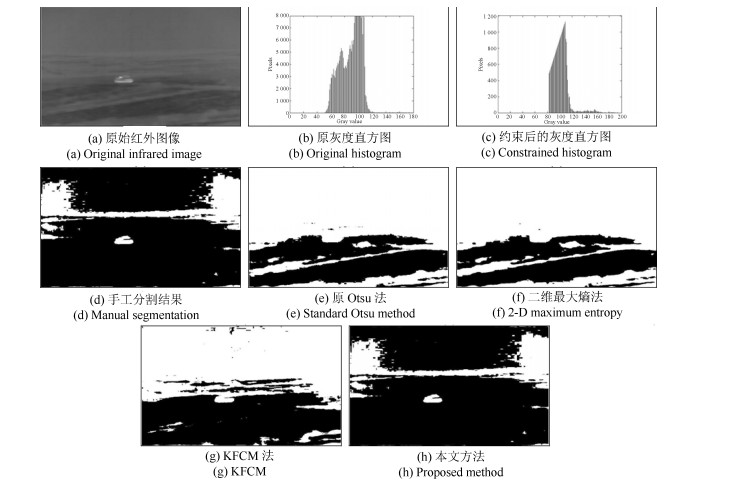
为实现自寻的反坦克导弹红外导引头对复杂背景下坦克目标的快速有效分割, 以红外导引头拍摄的坦克目标红外图像为研究对象, 采用计算简单的最大类间方差法, 对其分割效果进行了研究.根据实验结果, 揭示了最大类间方差法进行图像分割的有效性机理.在此基础上, 提出了对背景区域像素和灰度级别进行约束的思想, 以降低背景区域类内方差, 提高算法的分割精度, 并给出了具体的方法.首先利用坦克目标的先验信息, 根据光学成像原理, 推导了红外坦克目标图像的大小估计公式, 用来实现对背景像素的约束; 然后采用黄金分割法对背景灰度级别进行约束; 最后利用最大类间方差法实现了复杂背景下红外坦克目标的分割.实验表明, 本文方法的分割效果堪比手工分割效果, 且计算量较少, 算法耗时最大不超过1.44 ms, 完全满足对坦克目标图像分割的有效性和实时性需求.
为实现自寻的反坦克导弹红外导引头对复杂背景下坦克目标的快速有效分割, 以红外导引头拍摄的坦克目标红外图像为研究对象, 采用计算简单的最大类间方差法, 对其分割效果进行了研究.根据实验结果, 揭示了最大类间方差法进行图像分割的有效性机理.在此基础上, 提出了对背景区域像素和灰度级别进行约束的思想, 以降低背景区域类内方差, 提高算法的分割精度, 并给出了具体的方法.首先利用坦克目标的先验信息, 根据光学成像原理, 推导了红外坦克目标图像的大小估计公式, 用来实现对背景像素的约束; 然后采用黄金分割法对背景灰度级别进行约束; 最后利用最大类间方差法实现了复杂背景下红外坦克目标的分割.实验表明, 本文方法的分割效果堪比手工分割效果, 且计算量较少, 算法耗时最大不超过1.44 ms, 完全满足对坦克目标图像分割的有效性和实时性需求.



2016, 42(3): 431-442.
doi: 10.16383/j.aas.2016.c150587
cstr: 32138.14.j.aas.2016.c150587
摘要:
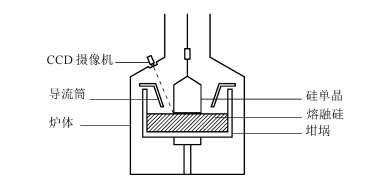
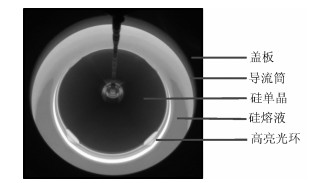
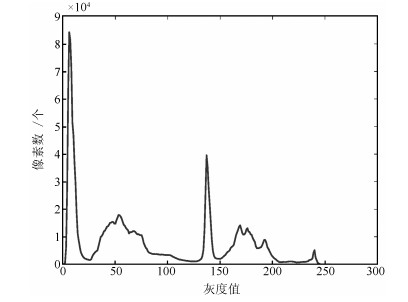
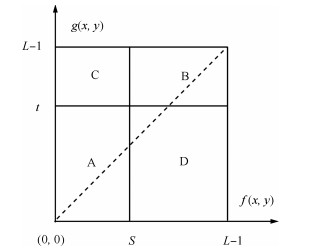
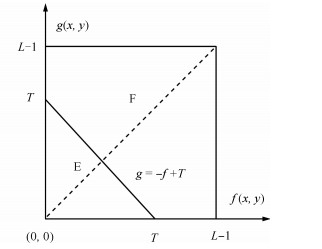
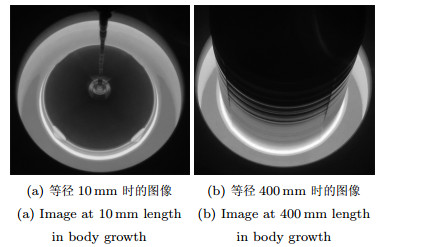
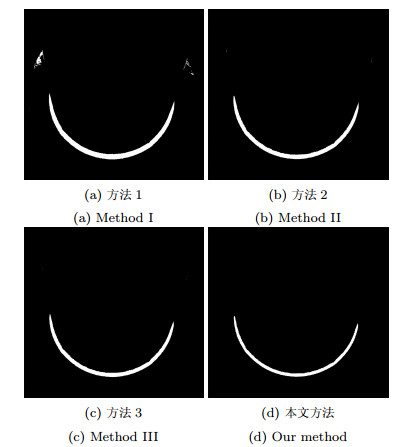
为提高对硅单晶直径检测图像高亮光环的分割精度, 提出了一种基于多目标人工鱼群算法的二维直方图区域斜分多阈值分割方法.首先设计了一种多目标人工鱼群算法, 并且改进了快速构造Pareto非劣解集的方法, 然后以最大类间方差和最大熵同时作为测度函数, 搜索最优的二维直方图区域斜分分割阈值.仿真结果表明, 所设计的多目标人工鱼群优化算法具有较高的搜索精度, 硅单晶直径检测图像分割实验结果表明, 提出的改进二维直方图区域斜分多阈值分割方法对高亮光环具有较高的分割精度.
为提高对硅单晶直径检测图像高亮光环的分割精度, 提出了一种基于多目标人工鱼群算法的二维直方图区域斜分多阈值分割方法.首先设计了一种多目标人工鱼群算法, 并且改进了快速构造Pareto非劣解集的方法, 然后以最大类间方差和最大熵同时作为测度函数, 搜索最优的二维直方图区域斜分分割阈值.仿真结果表明, 所设计的多目标人工鱼群优化算法具有较高的搜索精度, 硅单晶直径检测图像分割实验结果表明, 提出的改进二维直方图区域斜分多阈值分割方法对高亮光环具有较高的分割精度.




2016, 42(3): 443-454.
doi: 10.16383/j.aas.2016.c150511
cstr: 32138.14.j.aas.2016.c150511
摘要:
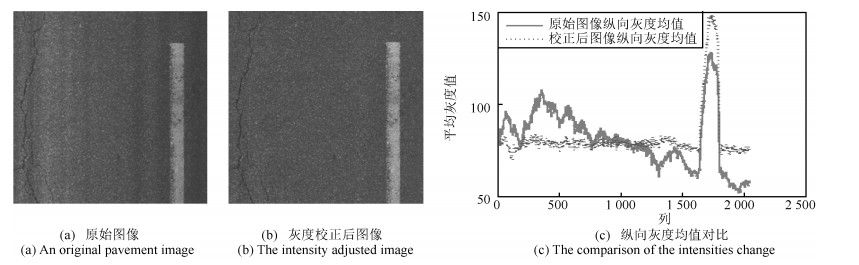
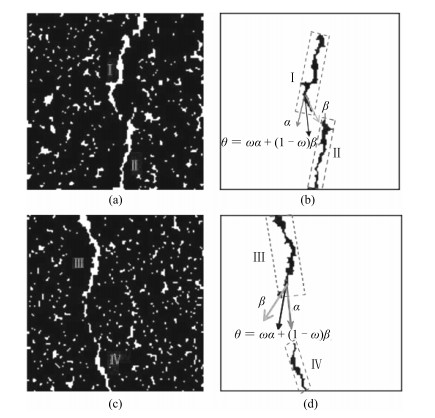
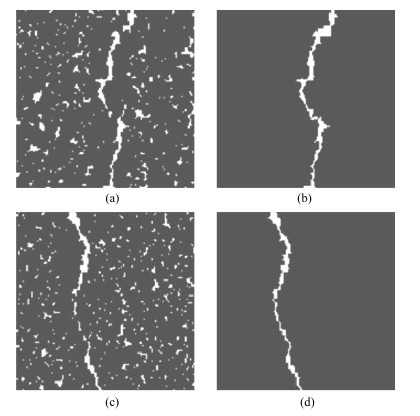
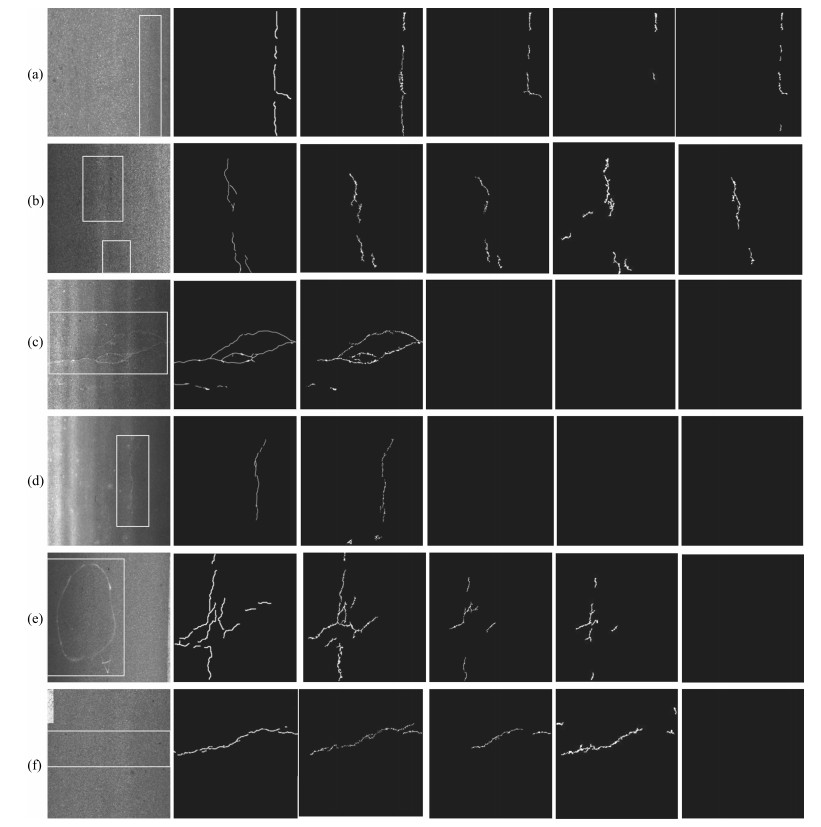
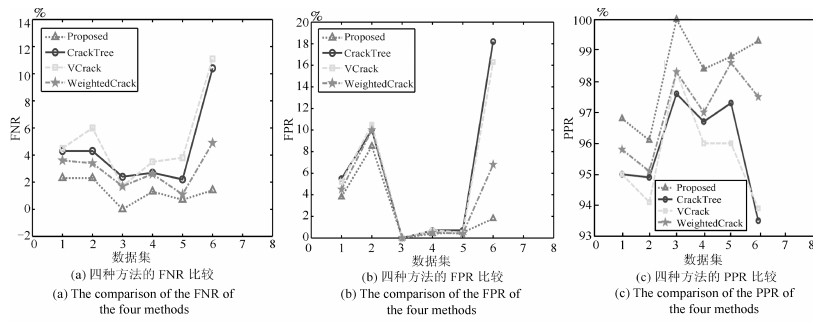
沥青路面裂缝自动检测是制约公路养护科学决策的最主要瓶颈.针对现有裂缝检测算法在大规模应用特别是广地域、多路况等复杂环境下算法稳定性、可靠性及实时性等方面存在严重不足问题.本文在观察大量实际工程路面图像基础上, 对路面裂缝特征进行全新定义, 提出了一种基于空间聚集特征的沥青路面裂缝检测方法, 参考裂缝的空间分布、灰度、几何等特征, 以子块图像为处理单元, 采用逐步求精的策略对子块图像进行分割, 快速定位空间聚集区域, 再对聚集区域进行评估得到信度高的裂缝候选区域; 最后以裂缝候选区域为种子区域, 在准确估算裂缝发展趋势的基础上, 结合裂缝片段聚集及相似性等特性, 去除噪声同时合并连接断裂的裂缝, 实现了裂缝区域较为完整的检测.通过测试多路况、多采集环境下近万样本, 并采用不同的方法对测试结果进行评估, 结果显示, 算法对不同类型路面图像中具有不同特征的裂缝区域均具有良好的检测性能, 裂缝定位准确性达到95%以上, 裂缝区域检测的完整性达到90%以上.
沥青路面裂缝自动检测是制约公路养护科学决策的最主要瓶颈.针对现有裂缝检测算法在大规模应用特别是广地域、多路况等复杂环境下算法稳定性、可靠性及实时性等方面存在严重不足问题.本文在观察大量实际工程路面图像基础上, 对路面裂缝特征进行全新定义, 提出了一种基于空间聚集特征的沥青路面裂缝检测方法, 参考裂缝的空间分布、灰度、几何等特征, 以子块图像为处理单元, 采用逐步求精的策略对子块图像进行分割, 快速定位空间聚集区域, 再对聚集区域进行评估得到信度高的裂缝候选区域; 最后以裂缝候选区域为种子区域, 在准确估算裂缝发展趋势的基础上, 结合裂缝片段聚集及相似性等特性, 去除噪声同时合并连接断裂的裂缝, 实现了裂缝区域较为完整的检测.通过测试多路况、多采集环境下近万样本, 并采用不同的方法对测试结果进行评估, 结果显示, 算法对不同类型路面图像中具有不同特征的裂缝区域均具有良好的检测性能, 裂缝定位准确性达到95%以上, 裂缝区域检测的完整性达到90%以上.



2016, 42(3): 455-465.
doi: 10.16383/j.aas.2016.c150212
cstr: 32138.14.j.aas.2016.c150212
摘要:
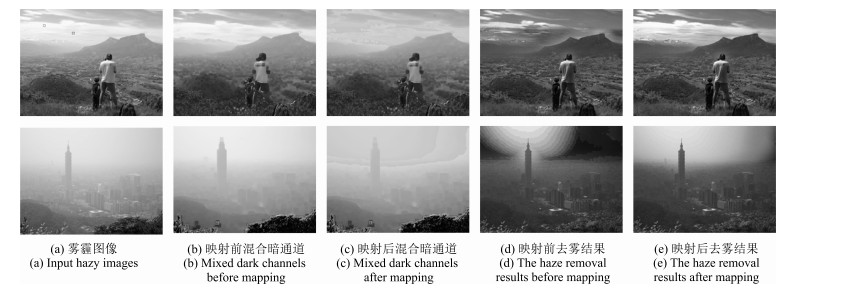
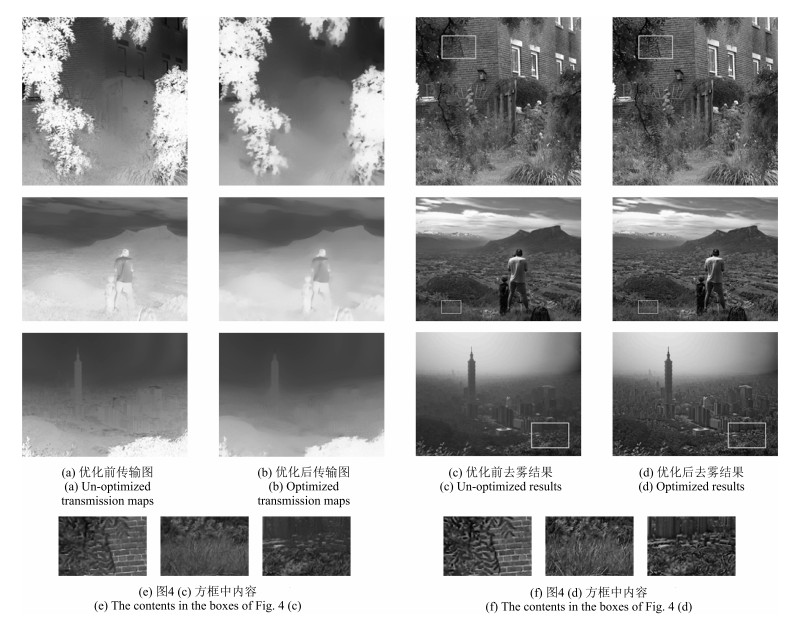
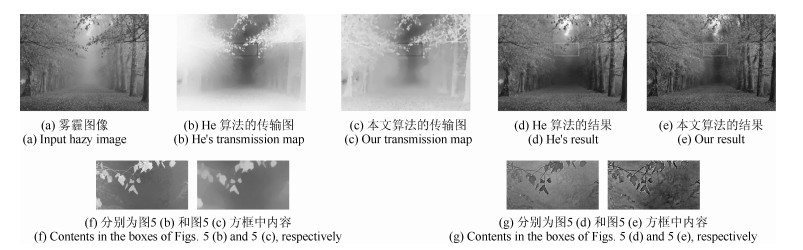
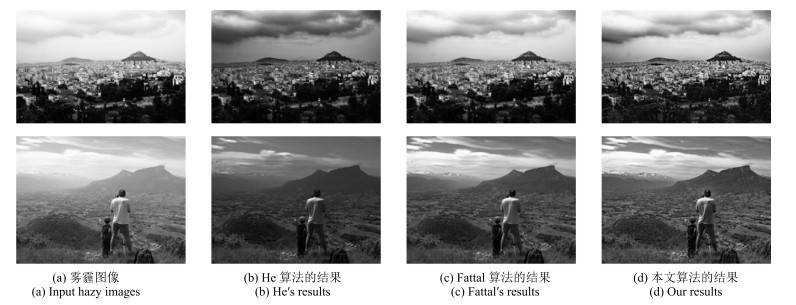
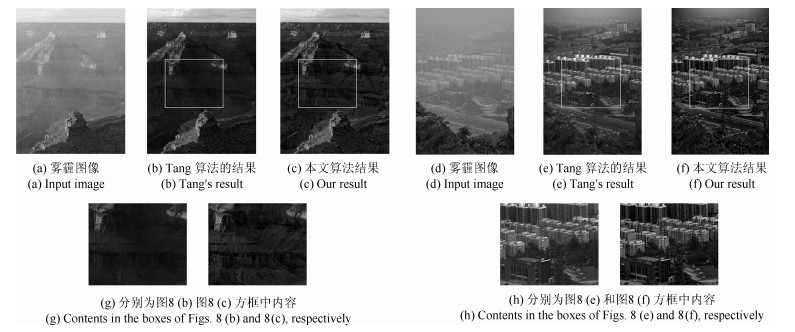
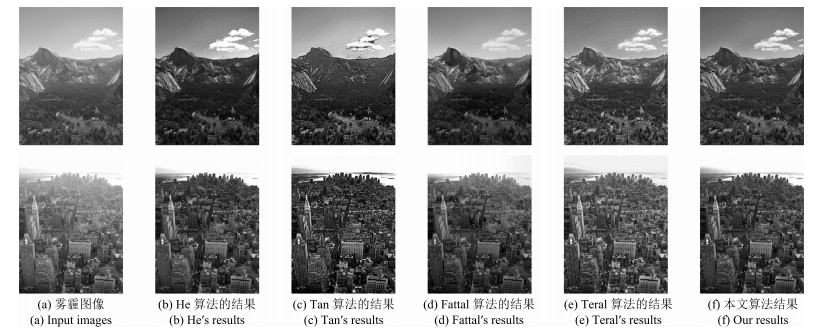
针对单幅雾霾图像中包含的大面积天空或白色物体等区域暗通道先验失效和导向滤波去雾方法去雾不彻底的问题, 提出了一种基于改进暗通道和导向滤波的单幅图像去雾算法.首先基于暗通道引入了混合暗通道, 然后对混合暗通道进行映射处理, 从而得到大气耗散函数粗估计值; 利用导向滤波方法优化大气耗散函数粗估计值, 进而求解环境光值和初始传输图; 利用全变差正则化方法对初始传输图进行优化, 以解决其平滑性较差的问题.实验结果表明, 本文算法得到的去雾图像具有较高的清晰度, 对于大面积天空或白色物体区域也能实现良好的去雾效果.
针对单幅雾霾图像中包含的大面积天空或白色物体等区域暗通道先验失效和导向滤波去雾方法去雾不彻底的问题, 提出了一种基于改进暗通道和导向滤波的单幅图像去雾算法.首先基于暗通道引入了混合暗通道, 然后对混合暗通道进行映射处理, 从而得到大气耗散函数粗估计值; 利用导向滤波方法优化大气耗散函数粗估计值, 进而求解环境光值和初始传输图; 利用全变差正则化方法对初始传输图进行优化, 以解决其平滑性较差的问题.实验结果表明, 本文算法得到的去雾图像具有较高的清晰度, 对于大面积天空或白色物体区域也能实现良好的去雾效果.




2016, 42(3): 466-472.
doi: 10.16383/j.aas.2016.c150377
cstr: 32138.14.j.aas.2016.c150377
摘要:
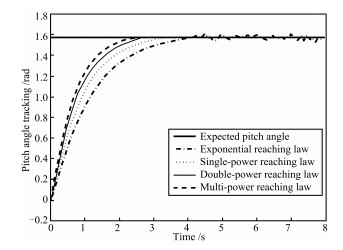
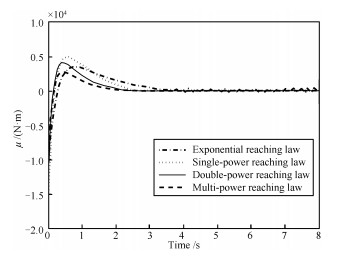
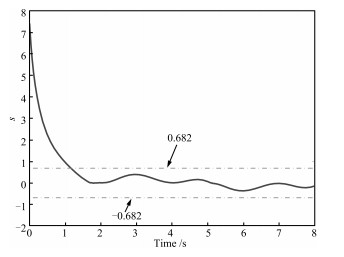
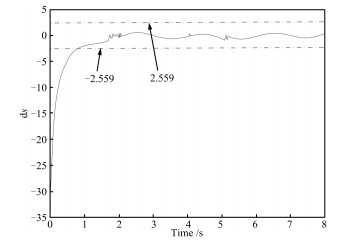
针对传统滑模趋近律使系统存在抖振现象、收敛速度较慢及动态响应不平滑等问题, 提出一种多幂次滑模趋近律.该趋近律通过三个幂次项系数在系统趋近过程不同阶段进行针对性地调节, 使系统动态响应过程的收敛速度大幅度提高, 且无抖振现象.理论验证了其存在性、可达性及稳定性, 并详细推导了趋近速率及干扰稳定界.以航天器姿态机动控制系统为例, 对比仿真结果表明该趋近律下, 系统的动态过程有较大改善并消除了抖振, 且在存在模型不确定性及外加干扰作用下, 系统仍可较快地收敛到平衡点附近的邻域内.
针对传统滑模趋近律使系统存在抖振现象、收敛速度较慢及动态响应不平滑等问题, 提出一种多幂次滑模趋近律.该趋近律通过三个幂次项系数在系统趋近过程不同阶段进行针对性地调节, 使系统动态响应过程的收敛速度大幅度提高, 且无抖振现象.理论验证了其存在性、可达性及稳定性, 并详细推导了趋近速率及干扰稳定界.以航天器姿态机动控制系统为例, 对比仿真结果表明该趋近律下, 系统的动态过程有较大改善并消除了抖振, 且在存在模型不确定性及外加干扰作用下, 系统仍可较快地收敛到平衡点附近的邻域内.

2016, 42(3): 472-480.
doi: 10.16383/j.aas.2016.c150339
cstr: 32138.14.j.aas.2016.c150339
摘要:
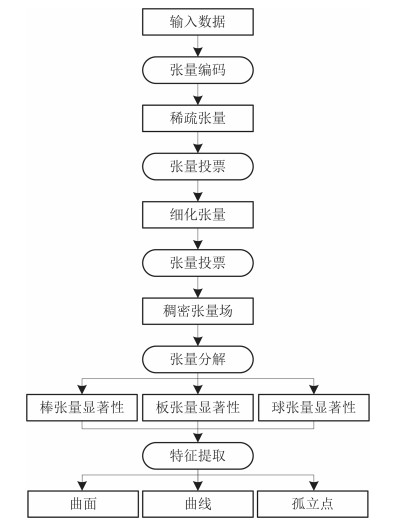
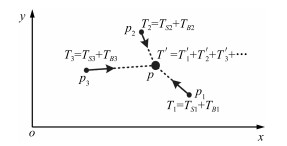
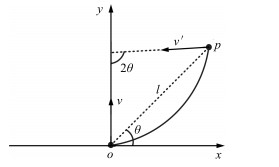
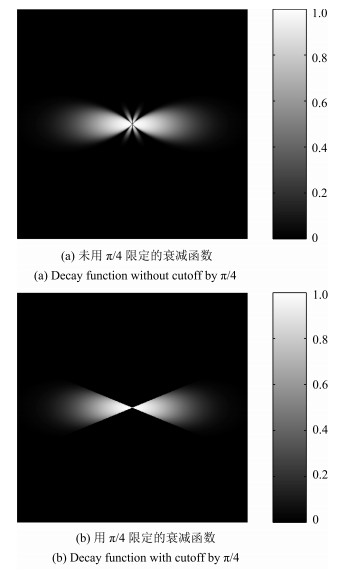
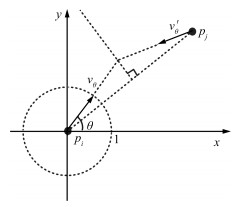
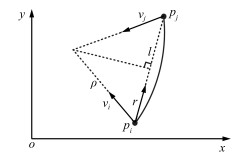
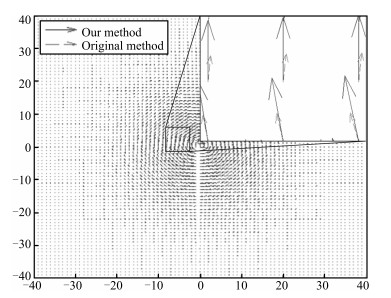
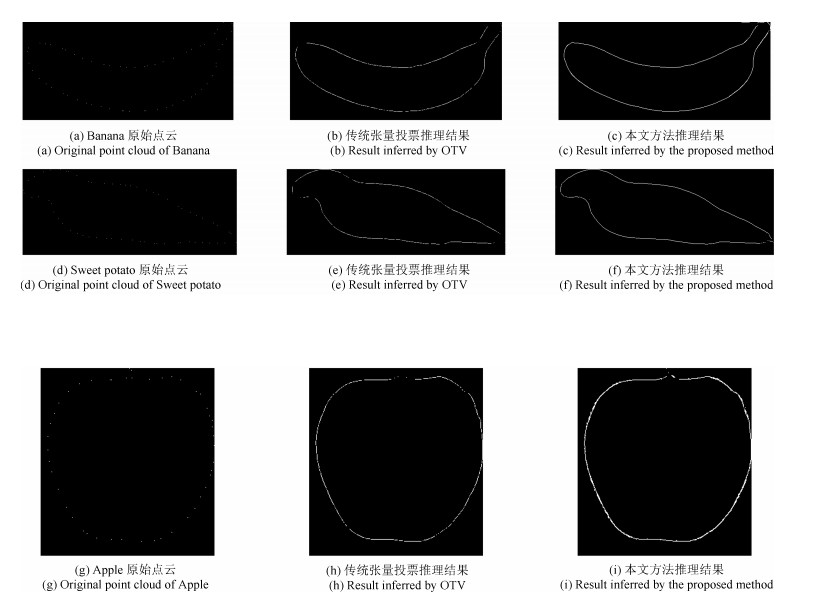
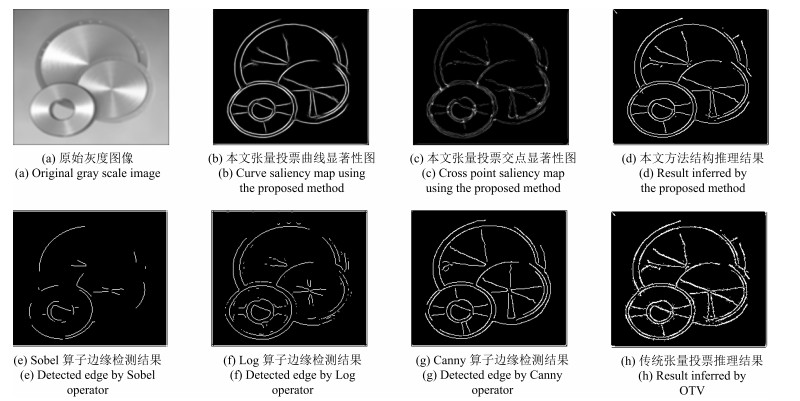
针对传统张量投票(Tensor voting)算法计算过程复杂、算法效率低的问题, 本文提出了一种二维解析张量投票算法.首先, 深入分析张量投票理论的基本思想, 分析传统张量投票算法的不足及其根源; 其次, 设计了一种二维解析棒张量投票新机制, 实现了二维解析棒张量投票的直接求取; 在此基础上, 利用二维解析棒张量投票不依赖参考坐标系的特性, 设计并求解了二维解析球张量投票表达式, 解决了长期困扰张量投票理论中球张量投票无法解析求解, 仅能通过迭代数值计算, 计算过程复杂、算法效率低、算法精度与算法效率存在矛盾的难题.最后, 通过仿真分析和对比实验验证了本文算法在精度和计算效率方面的性能均优于传统张量投票算法.
针对传统张量投票(Tensor voting)算法计算过程复杂、算法效率低的问题, 本文提出了一种二维解析张量投票算法.首先, 深入分析张量投票理论的基本思想, 分析传统张量投票算法的不足及其根源; 其次, 设计了一种二维解析棒张量投票新机制, 实现了二维解析棒张量投票的直接求取; 在此基础上, 利用二维解析棒张量投票不依赖参考坐标系的特性, 设计并求解了二维解析球张量投票表达式, 解决了长期困扰张量投票理论中球张量投票无法解析求解, 仅能通过迭代数值计算, 计算过程复杂、算法效率低、算法精度与算法效率存在矛盾的难题.最后, 通过仿真分析和对比实验验证了本文算法在精度和计算效率方面的性能均优于传统张量投票算法.